Int. Cl. 7 : A61B 17/00
|
|
|
- Francisco Javier Cano Lara
- hace 8 años
- Vistas:
Transcripción
1 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: k Número de solicitud: k Int. Cl. 7 : A61B 17/00 A61B 1/00 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación: k 71 Solicitante/s: UNIVERSIDAD DE MALAGA Plaza de El Ejido, s/n Málaga, ES 43 kfecha de publicación de la solicitud: k Inventor/es: Muñoz Martínez, Victor Fernando; Gómez de Gabriel, Jesús Manuel; Fernández Lozano, Jesús; García Cerezo, Alfonso y Vara Thorbeck, Carlos k 43 Fecha de publicación del folleto de la solicitud: k 74 Agente: No consta k 54 Título: Sistema robótico asistente para cirugía laparoscópica. k 57 Resumen: Sistema robótico asistente para cirugía laparoscópica, capaz de mover un instrumento quirúrgico en respuesta a las órdenes de un cirujano. El sistema consta de un robot dotado de un efector final que permite sujetar un instrumento quirúrgico, un controlador para el robot y un computador que permite interpretar las órdenes emitidas por el cirujano, bien mediante un sistema de reconocimiento de voz, bien mediante un teclado adosado al brazo robot. ES A1 Venta de fascículos: Oficina Española de Patentes y Marcas. C/Panamá, Madrid

2 DESCRIPCION Sistema robótico asistente para cirugía laparoscópica Estado de la técnica Las operaciones quirúrgicas mediante técnicas laparoscópicas consisten en realizar la intervención a través de pequeñas incisiones en el abdomen del paciente. A través de estas incisiones se hacen pasar los instrumentos requeridos por la operación en concreto, así como la óptica de una cámara que permite al cirujano ver la zona en la que se realiza la intervención. Esta técnica permite disminuir drásticamente el tamaño de las incisiones que se necesitan realizar, lo que se traduce en menores riesgos para el paciente, menores tiempos de post-operatorio y menores costes económicos de la intervención. Actualmente el procedimiento normal en estas operaciones consiste en sostener la cámara mediante la ayuda de un asistente, mientras que el cirujano maneja el instrumental quirúrgico insertado en el abdomen del paciente. Esto requiere una gran coordinación entre el ayudante y el cirujano, que por conseguida que esté siempre presenta tres problemas fundamentales: 1) El cirujano debe hacer entender en cada instante qué es lo que quiere que haga el ayudante. Esto se encuentra sujeto a todos los problemas propios de la comunicación verbal, y no siempre se consiguen los resultados que espera el cirujano. Por muy compenetrado que esté un cirujano con su ayudante, suelen darse situaciones en las que el cirujano no explica bien su deseo o el ayudante lo malinterpreta. 2) La imagen, al ser sujetada la cámara por una persona, no es totalmente estable, resultando afectada por el pulso del ayudante que la maneje. Este efecto se hace más acusado según se va prolongando la intervención. 3) El asistente, situado en una posición incómoda, tiene dificultades para mover con precisión la cámara, sobre todo cuando empieza a verse afectado por el cansancio. Esto hace que en ocasiones la óptica de la cámara roce alguna víscera, lo que a su vez obliga a extraerla y limpiarla. Este problema prolonga el tiempo de la operación, y por consiguiente, el tiempo que el paciente está sometido a anestesia, con lo que aumentan los riesgos inherentes a la misma. Así mismo, hay ocasiones en las que el cirujano necesita usar más de dos instrumentos a la vez, lo que requiere la participación de un segundo cirujano. Esto agrava el primero de los problemas de coordinación detallado más arriba. Breve resumen de la invención La presente memoria describe un sistema robótico que permite manejar con seguridad un instrumento quirúrgico en las operaciones de cirugía laparoscópica. El control de este instrumento lo realiza el propio cirujano mediante un sistema de reconocimiento de voz, eliminándose así todos los problemas propios de la coordinación entre el cirujano y un ayudante. Además, cuando dicho sistema se utiliza para mover la cámara empleada en la intervención mediante cirugía laparoscópica, consigue mejorar considerablemente las características de la imagen que obtiene el cirujano, tanto por su estabilidad como por su correspondencia con los deseos del propio cirujano. Como sistema alternativo para posicionar la cámara se utiliza una palanca de mando. El sistema consta de un robot de tres grados de libertad, efector final especialmente diseñado para sujetar un instrumento quirúrgico para cirugía laparoscópica, que además permite hacer girar el instrumento quirúrgico sobre su propio eje, un controlador para el brazo robot y un computador que permite interpretar las órdenes del cirujano y transmitirlas al controlador antes mencionado. El efector final está diseñado de modo que añade dos grados de libertad pasivos al robot. Esto hace que el movimiento del útil de laparoscopia dentro del abdomen del enfermo sea más seguro, por cuanto la utilización del instrumental quirúrgico empleado en laparoscopia habitualmente (cuando es usado directamente por los cirujanos) se basa en movimientos en tomo a un punto de pivotaje constituido por el lugar en el que el instrumental atraviesa la piel del paciente. El uso de estas dos articulaciones pasivas permite que el punto de pivotaje sea establecido de un modo natural por el movimiento del instrumento, al igual que pasa cuando quien maneja el endoscopio es un humano, frente a lo que pasaría si el instrumento estuviese fijado directamente a la muñeca del robot, en que el establecimiento del punto de pivotaje vendría determinado por los cálculos que se hiciesen para estimarlo. En este caso, cualquier error tendría como resultado que el sistema robótico tendiese a forzar el punto de pivote desde su situación real a la estimada empujando la 2

3 5 piel del enfermo. Dependiendo de la magnitud de ese error, un fallo en la estimación del punto de pivote podría dar lugar a situaciones peligrosas, como desgarros en la piel del paciente. El efector final antes mencionado dispone, además, de un grado de libertad motorizado que permite hacer girar el endoscopio en torno a su propio eje. Ello permite emplear eficazmente endoscopios con óptica inclinada (esto es, aquellos que muestran no la imagen que se encuentra en la continuación del eje del endoscopio, sino en un cierto ángulo respecto a éste). Descripción detallada de la invención El sistema consta de un brazo robot de tres grados de libertad, un efector final especialmente diseñado para sujetar un instrumento quirúrgico para cirugía laparoscópica, un controlador para el brazo robot y un computador que permite interpretar las órdenes del cirujano y transmitirlas al controlador antes mencionado. El brazo robot está instalado sobre un montaje móvil que se puede situar al lado de la mesa de operaciones (Figura 1). El montaje dispone de frenos o un sistema análogo que permite inmovilizarlo. Tanto el montaje como el propio brazo pueden cubrirse con una funda estéril. En la base de dicho montaje móvil pueden colocarse el controlador y el computador antes mencionado, aunque también pueden disponerse en otra localización dentro del quirófano. El brazo robot (Figura 2) consta de una primera articulación prismática (a) que puede moverse bien manualmente, para ajustar la altura del resto del conjunto del brazo robot, bien automáticamente, integrada en los movimientos que hace el brazo para seguir las consignas del usuario. Esta articulación prismática se mueve en el eje z de un primer sistema de coordenadas. Una segunda articulación (b), de revolución, mueve el segundo miembro del robot (c) en un plano paralelo al plano x-y definido por el primer sistema de coordenadas. Al segundo miembro del robot (c) está unida una tercera articulación (d) también de revolución, que mueve al tercer miembro del robot (e) en el mismo plano que la articulación (b). Una cuarta articulación de revolución (f) se encuentra unida a este miembro (e), imprimiendo a un cuarto miembro (g) un movimiento en el mismo plano que las articulaciones (b) y (d), con la salvedad de que, a diferencia de éstas, la articulación (f) no cuenta con un actuador propio, siendo su movimiento esclavo del movimiento de las articulaciones (b) y (d) mediante el concurso de un sistema de cables. Este sistema permite que el miembro (g) mantenga siempre su orientación inicial, lo que de otro modo requeriría un actuador propio en la articulación (f) y un sistema de control más complicado. El conjunto se completa con una articulación de revolución (h) unida al miembro (g), pero moviendo a un elemento (i) en un plano perpendicular al plano x-y antes mencionado. A este miembro (i) va unido un efector final (j) que permite sujetar con seguridad un endoscopio, y que añade dos grados de libertad pasivos al conjunto. Estos dos grados de libertad pasivos permiten usar con seguridad el endoscopio, puesto que impiden que se fuerce la piel del paciente cuando se mueve este instrumento, aun a pesar de que se pudiera cometer algún error en el movimiento. El sistema de cables mencionado para obtener el movimiento de la articulación de revolución (f) sin emplear un actuador y un controlador propios se basa en el uso de polígonos articulados (Figura 3). Al miembro (c) va adosado un paralelepípedo articulado (k), de manera que el lado menor (1) es siempre paralelo al otro lado menor (m). Igualmente se dispone otro paralelepípedo articulado solidario al miembro (e), de manera que sus lados menores son paralelos a aquéllos del paralelepípedo (k). De este modo, al mover el miembro (e), el lado menor (n) del segundo paralelepípedo se mantiene paralelo al otro lado menor (ñ), y éste a su vez es paralelo al lado (m) y por tanto al (l). Por tanto, con el movimiento de las articulaciones (b) y (d) (ambas motorizadas) la articulación (f) se mueve de manera que el elemento (g) siempre se mantiene paralelo a su posición inicial. Idealmente, estos paralelogramos articulados se disponen en el interior de los elementos (c) y (f), de modo que no sean visibles y el conjunto ocupe menos espacio. Así mismo, esto impide que se interfiera el movimiento de los paralelepípedos y por tanto el del propio brazo. Preferentemente estos paralelepípedos tienen sus lados mayores hechos de cable no elástico de suficiente resistencia, aunque también pueden hacerse mediante varillas rígidas. En la muñeca del robot se fija el efector final antes mencionado (Figura 4). Consta de dos articulaciones pasivas (a) y (b) que permiten que el instrumento quirúrgico se mueva con dos grados de libertad cuando no está insertado en el abdomen del paciente. Estos dos grados de libertad dotan al sistema de mayor seguridad, por cuanto permiten que el punto de pivotaje se establezca de un modo natural por el movimiento del instrumento, al igual que cuando lo maneja un humano. Además, las dos articulaciones disponen de medios para averiguar la magnitud del ángulo que han girado, de modo que este valor pueda quedar disponible para el sistema. Estos sensores pueden ser, por ejemplo, potenciómetros o sensores medidores de la posición angular. Igualmente pueden disponerse dos sensores por eje, lo que permite tener 3
.")
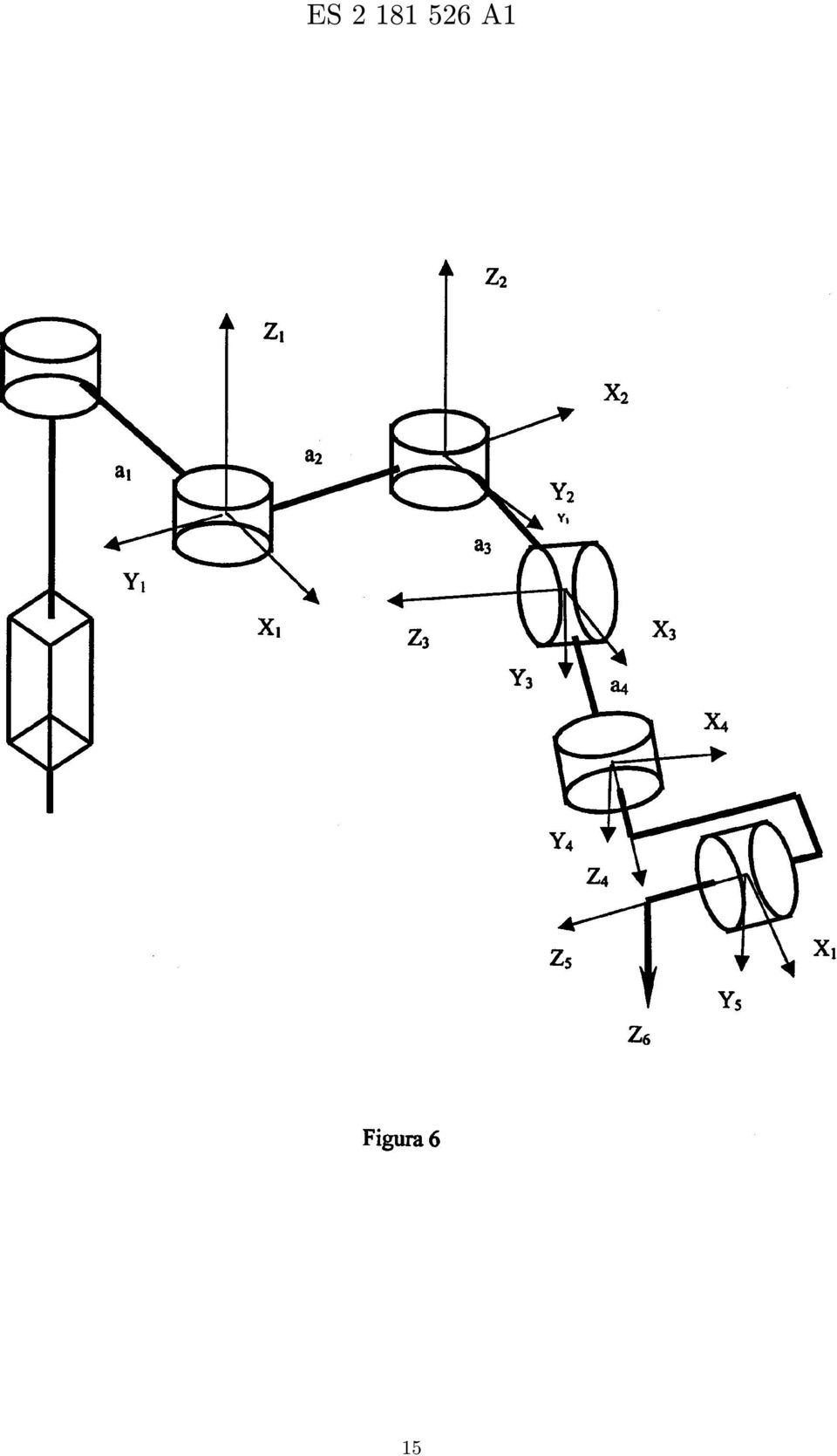
4 redundancia en las medidas, bien para promediar éstas, bien para detectar el posible fallo de un sensor. Así mismo, el adaptador que sujeta el instrumento quirúrgico (ver Figura 5) dispone de medios para hacer girar el endoscopio en tomo a su propio eje, y sensores para conocer el ángulo girado. Estos medios constan de un anclaje flexible que permite retirar con rapidez la óptica del endoscopio sin necesidad de herramientas, pero que igualmente sujeta con seguridad y firmeza dicho elemento. Este anclaje consta de dos ruedas (a) cubiertas de goma flexible y dispuestas en los extremos de una pinza (b) que se mantiene con un determinado ángulo de apertura, por ejemplo mediante el concurso de un muelle. En esta pinza (b) se introduce la óptica del endoscopio, de modo que se mantiene fija mediante la intervención de una tercera rueda (c) también cubierta de goma. A esta rueda (c) se le comunica un movimiento de rotación, por ejemplo mediante un tren de engranajes o una correa de transmisión, actuando como origen de tal movimiento un actuador (d), que puede ser un servo o un motor eléctrico, aunque también puede ser cualquier otro medio de actuación lo suficientemente pequeño y preciso. El controlador del brazo robot está situado en la base del montaje móvil de éste. Este controlador recibe las señales procedentes de sensores de posición situados en cada una de las articulaciones (activas y pasivas) del robot (incluyendo el efector final), lo que le permite conocer en cada momento la posición de éste mediante el modelo cinemático directo del mismo, obtenido estableciendo varios sistemas de coordenadas a lo largo del brazo robot (ver Figura 6): donde, m 11 m 12 m 13 m 14 m 21 m 22 m 23 m 24 m 31 m 31 m 33 m 34 m 41 m 42 m 43 m 44 m 11 =Cos(θ 5 + θ 6 )Sen(θ 4 )+Cos (θ 1 + θ 2 )Cos(θ 4 )Cos(θ 5 + θ 6 ) + Sen(θ 3 )Sen(θ 5 + θ 6 ) m 12 =Cos(θ 4 )Sen(θ 1 + θ 2 )+Cos(θ 1 + θ 2 )Cos(θ 3 )Sen(θ 4 ) m 13 =Sen(θ 1 + θ 2 )Sen(θ 5 + θ 6 )+Cos(θ 1 + θ 2 )(-Cos(θ 5 + θ 6 )Sen(θ 3 )+Cos(θ 3 )Cos(θ 4 )Sen(θ 5 + θ 6 )) m 14 = 1 2 (2a 1Cos(θ 1 ))+2Cos(θ 1 + θ 2 )(a 2 +a 3 Cos(θ 3 )) m 21 =Cos(θ 5 + θ 6 )(Cos(θ 3 )Cos(θ 4 )Sen(θ 1 + θ 2 )-Cos(θ 1 + θ 2 )Sen (θ 4 )) + Sen(θ 1 + θ 2 )Sen(θ 3 )Sen (θ 5 + θ 6 ) m 22 =Cos(θ 1 + θ 2 )Cos(θ 4 )+Cos(θ 3 )Sen(θ 1 + θ 2 )Sen(θ 4 ) m 23 =Sen(θ 5 )(Cos(θ 6 )(Cos(θ 3 )Cos (θ 4 )Sen(θ 1 + θ 2 )-Cos(θ 1 + θ 2 )Sen(θ 4 )) + Sen(θ 1 + θ 2 )Sen(θ 3 )- Sen(θ 6 ))Cos(θ 5 )Cos(θ 6 )Sen(θ 1 + θ 2 )Sen(θ 3 )-Sen(θ 6 )(Cos(θ 3 )Cos(θ 4 )Sen(θ 1 + θ 2 )+Cos(θ 1 + θ 2 )- Sen(θ 4 )) m 24 = 1 2 (2a 1Sen(θ 1 )+2Sen(θ 1 + θ 2 )(a 2 +a 3 Cos(θ 3 ))) m 31 =Cos(θ 4 )Cos(θ 5 + θ 6 )Sen (θ 3 )Sen(θ 5 + θ 6 ) m 32 =Sen(θ 3 )Sen(θ 4 ) m 33 =Cos(θ 3 )Cos(θ 5 + θ 6 )+Cos(θ 4 )Sen(θ 3 )Sen(θ 5 + θ 6 ) m 34 =a 3 Sen(θ 3 ) m 41 =0 m 42 =0 m 43 =0 m 44 =1 siendo θ 1, θ 2, θ 3, θ 4, θ 5, θ 6,losángulos de giro de las articulaciones primera, segunda, tercera, cuarta, quinta y sexta, respectivamente, a 1,a 2,a 3, las longitudes de los elementos del robot que unen la articulación primera con la segunda, la segunda con la tercera y la tercera con la cuarta, respectivamente. 4
 cubiertas de goma flexible y dispuestas en los extremos de una pinza (b) que se mantiene con un determinado ángulo de apertura, por ejemplo mediante el concurso")
5 Igualmente, mediante el modelo cinemático inverso del brazo robot y una planificación de trayectorias (en posición, velocidad y aceleración), además de la informaciónproporcionada por los sensores angulares situados en el robot, el controlador antes mencionado calcula las actuaciones necesarias para llegar a una posición deseada. Anexo a este controlador se encuentra un computador encargado de manejar la interfaz de usuario. En este computador puede ejecutarse un programa de reconocimiento de voz que permita interpretar las órdenes del cirujano. Igualmente, puede recibir las señales que produzcan otros medios de control a la disposición del cirujano, tales como un teclado o una palanca de control. Así mismo, puede encargarse de los procesos necesarios para permitir que estos medios de control a disposición del cirujano (incluyendo el programa de reconocimiento de voz) puedan usarse remotamente a través de una red de comunicaciones, bien local o bien de un ámbito mayor, como pueda ser Internet. Tanto las señales de los medios adicionales de control antes mencionados como las órdenes recibidas a través del interfaz de voz se transforman en consignas que se envían al controlador del robot. Estas indican los movimientos que debe realizar el brazo. Este computador anexo también puede encargarse de la presentación de diversa informaciónal usuario, como por ejemplo, aunque no exclusivamente, diagramas que representen la posición actual del instrumento quirúrgico o zonas en las que es peligroso el movimiento. Igualmente puede llevar un registro de los movimientos efectuados por el robot, y las posiciones ocupadas por el sistema, permitiendo una reconstrucción a posteriori de la operación si ello fuese necesario. Otra tarea que puede asumir el computador anexo al sistema es la vigilancia del controlador del robot, de modo que pueda interrumpir el funcionamiento de éste si detecta algún tipo de anomalía que pueda afectar a la seguridad de la operación que se esté realizando. Físicamente, este computador puede situarse junto al controlador del robot o a cierta distancia de éste, estando unidos en este caso mediante un enlace de datos conveniente, como puede ser un enlace serie o uno del tipo ethernet o similar. Para el cálculo de los movimientos del robot anteriormente mencionados se establece un sistema de referencia en el efector final del modo que se indica en la Figura 7. Para calcular las distancias y las direcciones del movimiento del brazo robot en respuesta a las peticiones del cirujano se procede del modo siguiente: 1) Cálculo del punto de pivotaje. Una vez insertado el endoscopio en el abdomen del paciente se calcula la situación del punto en el que el endoscopio atraviesa la piel del mismo. Este se denomina punto de pivotaje, y será utilizado en cálculos posteriores. Para hallar su localización, se mueve el endoscopio una distancia conocida en una dirección también conocida del sistema de referencia situado en el endoscopio y se leen los valores de los ángulos del adaptador una vez completado ese movimiento. Luego se calculan las coordenadas del punto de pivotaje para el sistema de referencia antes mencionado (Figura 8), según las siguientes ecuaciones: L 0 = dx Cos(α 1 ) Sen(α 1 -α 0 ) ; 50 donde (ver Figura 8) x=l 0 *Sen(α y0 )*Cos(α x0 ); y=-l 0 *Sen(α x0 ); z=l 0 *Cos(α y0 )*Cos(α x0 ); L 0 es la distancia del punto de pivote al origen del sistema de referencia situado en el endoscopio; dx es la magnitud del desplazamiento del endoscopio en una dirección conocida; α 0 es el ángulo inicial en uno de los ejes del sistema de referencia antes mencionado; α 1 es el ángulo final en uno de los ejes del sistema de referencia antes mencionado; 5

6 α x0, α y0 son los ángulos iniciales en los ejes X e Y respectivamente del sistema de referencia del endoscopio; α x1, α y1 son los ángulos finales en los ejes X e Y respectivamente del sistema de referencia del endoscopio. La precisión en el cálculo de la distancia l puede mejorarse elevando el número de movimientos empleados para calcular el punto de pivote y promediando los resultados obtenidos. La operación del cálculo del punto de pivote sólo tiene que efectuarse una vez, al comienzo de la operación quirúrgica. El resultado queda almacenado en el sistema. 2) Cálculo del movimiento a efectuar por el brazo robot. Se fija una distancia (que puede mantenerse constante o variar a lo largo de la intervención quirúrgica) que será la que recorra el extremo del endoscopio en cada uno de sus movimientos en el plano XY del sistema de referencia mencionado más arriba. Para otros movimientos, puede mantenerse esta distancia o cambiarse por otra que se considere más adecuada. En general, para ambos tipos de movimiento el procedimiento es el siguiente: 1) Se averiguan los valores angulares de la posición actual, a través de las lecturas de los sensores colocados en el adaptador del endoscopio. 2) A partir de los ángulos y del incremento deseado se hallan las coordenadas en esféricas que tendrá el extremo del endoscopio tras el movimiento. Estas coordenadas esféricas se caracterizan como: donde la penetración se define como: (α x, α y, penetración) penetración = Longitud total del endoscopio - L siendo L 0 la calculada anteriormente. 3) Puesto que conocemos la longitud total del endoscopio, calculamos las coordenadas cartesianas que ocupará lacámara tras el movimiento: w = Longitud total - penetración x = w*sen(α y )*Cos(α x ); y=-w*sen(α x ); z = w*cos(α y )*Cos(α x ); donde (ver Figura 8) Longitud total es la longitud total del endoscopio, desde el extremo hasta el origen del sistema de referencia situado en la cámara. penetración es la diferencia entre la longitud total del endoscopio y la longitud l hallada al calcular el punto de pivotaje. w es la distancia del punto de pivotaje al origen del sistema de referencia situado en el endoscopio, actualizada al valor que tendrá después del movimiento; α x, α y son los ángulos respecto a los ejes X e Y respectivamente del sistema de referencia del endoscopio; 4) Se le envía al robot la orden de alcanzar el punto resultado de la transformación anterior. Aplicaciones El sistema permite aplicar las características de precisión, seguridad y registro de movimientos propias de los robots a un campo como la cirugía, particularmente la cirugía mínimamente invasiva. El adaptador puede acoger cualquier endoscopio de los utilizados en estas técnicas quirúrgicas, como cámaras de laparoscopia, resectores de próstata, etc. En el caso de usarse para mover una cámara de laparoscopia, se obtienen una serie de ventajas, como una imagen más estable (sin que le afecte el tiempo de operación), una mejor coordinación entre el equipo médico, o una reducción del tiempo de intervención(lo que a su vez reduce el tiempo de anestesia). Además, el empleo de un sistema de reconocimiento de voz como medio del cirujano para dar las órdenes al sistema robótico le permite manejar un instrumento adicional sin contar con el auxilio de un ayudante, facilitando la realización de tareas complejas dentro de las 6

7 técnicas de cirugía mínimamente invasiva. Igualmente, la posibilidad de usar los medios de control a distancia, mediante el empleo de redes de comunicaciones, permite la posibilidad de aplicar conceptos como el diagnóstico compartido, y llegar hasta la realización de tareas quirúrgicas por parte de un cirujano no presente en el quirófano. Explicación de los dibujos Figura 1: esquema general del sistema robótico asistente para cirugía laparoscópica. Se muestra el brazo robot montado en el soporte móvilsituadojuntoalamesadeoperaciones. Figura 2: esquema articular del brazo robot, incluyendo el efector final que sujeta el instrumento quirúrgico (representado como una flecha). Figura 3: esquema del sistema de cables empleado para obtener el movimiento de la tercera articulación de revolución sin emplear un actuador y un controlador propios. Figura 4: dos vistas del efector final que sujeta el instrumento quirúrgico. Incluye dos articulaciones pasivas (a) y (b) que permiten que el instrumento quirúrgico se mueva con dos grados de libertad. Una tercera articulación (c) permite que el instrumento quirúrgico gire en tomo a su propio eje controlado por el sistema. En la figura aparece representado sosteniendo una cámara de laparoscopia. Figura 5: subconjunto del efector final para permitir el giro del instrumento quirúrgico en tomo a su propio eje. En el esquema aparece representado sujetando una cámara de laparoscopia, en cuyo caso la cámara permanece fija y sólogiralaóptica. Consta de dos ruedas (a) recubiertas de goma flexible y dispuestas en los extremos de una pinza (b) que se mantiene con un determinado ángulo de apertura, por ejemplo mediante el concurso de un muelle (no representado). En esta pinza (b) se introduce la óptica del endoscopio, de modo que se mantiene fija mediante la intervención de una tercera rueda (c) también cubierta de goma, a la que se le comunica un movimiento de rotación, por ejemplo mediante un tren de engranajes o una correa de transmisión, actuando como origen de tal movimiento un actuador (d). Figura 6: esquema articular del brazo robot incluyendo la representación de los sistemas de referencia empleados para obtener el modelo cinemático directo del mismo. Estos sistemas se han escogido y situado según el método de Denavit-Hartenberg. Figura 7: sistema de referencia empleado para el cálculo de los movimientos que debe realizar el brazo en correspondencia con las órdenes recibidas. El eje Z sigue el del instrumento quirúrgico, con el sentido positivo apuntando al paciente. El eje X coincide en dirección con el eje de la primera articulación pasiva del efector final. El eje Y coincide con el de la segunda articulación pasiva del efector final. El sentido positivo de los ejes X e Y es el que se muestra en la figura. Figura 8: cálculo del punto de pivotaje del instrumento quirúrgico una vez insertado en el paciente. El instrumento se mueve una distancia conocida dx en una dirección también conocida del sistema de referencia situado en el propio instrumento (en la representación la dirección es la del semieje X positivo). L 0 es la distancia del punto de pivote al origen del sistema de referencia situado en el endoscopio; α 0 es el ángulo inicial en uno de los ejes del sistema de referencia antes mencionado (en la representación, en el eje X); α 1 es el ángulo final en uno de los ejes del sistema de referencia antes mencionado

8 REIVINDICACIONES Sistema robótico asistente para cirugía laparoscópica, caracterizado por el uso de un brazo robot de tres grados de libertad, un efector final que permite sujetar el endoscopio requerido para el procedimiento quirúrgico para el que se emplee el sistema, un controlador para el brazo robot y un computador encargado de interpretar las órdenes que emita el cirujano, bien mediante la voz o bien mediante otros métodos, y de preparar y presentar al cirujano los datos que requiera para llevar a cabo la operación con mayor seguridad. 2. Sistema robótico asistente para cirugía laparoscópica según la reivindicación 1), en el que el computador lleva a cabo un registro de los movimientos realizados por el robot y las posiciones ocupadas por el instrumento quirúrgico a lo largo de toda la operación. 3. Sistema robótico asistente para cirugía laparoscópica según las reivindicaciones 1) y 2), en el que el computador permite que las órdenes emitidas por el cirujano, y las imágenes representadas para permitir aéste llevar a cabo la operación, lo sean sobre un computador comunicado con el primero por medio de una red de comunicaciones. 4. Un efector final para cirugía laparoscópica que añade a la configuración del robot dos grados de libertad pasivos y uno activo, de modo que los grados de libertad pasivos permiten que el endoscopio se mueva de una manera natural, similar al modo en que se mueve cuando lo maneja una persona, y el grado de libertad activo permite hacer girar al endoscopio en torno a su eje longitudinal. 5. Un efector final para cirugía laparoscópica según la reivindicación 4) que permite que el endoscopio pueda soltarse cuando se requiera sin que sea preciso el empleo de herramientas. 6. Un efector final para cirugía laparoscópica según la reivindicación 5) que cuenta con dos articulaciones pasivas dotadas de sensores que permiten conocer la posición angular de las dos articulaciones Un efector final para cirugía laparoscópica según la reivindicación 6) que cuenta con una articulación activa que permite hacer girar el endoscopio en torno a su eje longitudinal, y dotado de sensores que permiten conocer su posición angular respecto a dicho eje de giro. 8. Un efector final para cirugía laparoscópica según la reivindicación 7) en el que se emplea más de un sensor por articulación para promediar las medidas y para detección de fallos. 9. Un efector final para cirugía laparoscópica según la reivindicación 8) en la que los sensores empleados son potenciómetros Un efector final para cirugía laparoscópica según la reivindicación 8) en la que los sensores empleados son encoders. 11. Un procedimiento para calcular el punto de pivotaje del endoscopio una vez insertado en el paciente basado en los siguiente pasos: movimiento del endoscopio una distancia conocida en una dirección también conocida de un sistema de referencia situado en el endoscopio, con el eje Z según el eje del endoscopio; lectura de los valores de los ángulos una vez completado ese movimiento; cálculo de las coordenadas del punto de pivote para el sistema de referencia antes mencionado, según las siguientes ecuaciones: l= d*cos(α 1) Sen(α 1 -α 0 ) ; x = l*sen(α y0 )*Cos(α x0 ); y=-l*sen(α x0 ); z=l*cos(α y0 )*Cos(α x0 ); donde l es la distancia del punto de pivote al origen del sistema de referencia situado en el endoscopio; α 0 es el ángulo inicial en uno de los ejes del sistema de referencia antes mencionado; α 1 es el ángulo final en uno de los ejes del sistema de referencia antes mencionado; α x0, α y0 son los ángulos iniciales en los 60 8

9 ejes X e Y respectivamente del sistema de referencia del endoscopio; α x1, α y1 son los ángulos finales en los ejes X e Y respectivamente del sistema de referencia del endoscopio Un procedimiento para calcular el punto de pivote del endoscopio una vez insertado en el paciente según la reivindicación 11) en la que se realizan varios movimientos y se promedia el valor de l
 en la que se realizan varios movimientos y se promedia el valor de l.")
10 10

11 11

12 12

13 13

14 14

15 15
16 16

17 17

18 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 ES k 21 N. solicitud: k 22 Fecha de presentación de la solicitud: k 32 Fecha de prioridad: INFORME SOBRE EL ESTADO DE LA TECNICA k 51 Int. Cl. 7 : A61B 17/00, 1/00 DOCUMENTOS RELEVANTES Categoría Documentos citados Reivindicaciones afectadas E ES A1 (UNIVERSIDAD DE MÁLAGA) , 1 reivindicaciones. X WO A1 (MASSACHUSETTS INSTITUTE OF TECHNOLOGY) , 1 reivindicaciones. A 2-12 X WO A1 (COMPUTER MOTION INC) , página 4, 1 línea 7 - página 6, línea 24; página 9, línea 9 - página 40, línea 12. A 2-12 X EP A1 (IBM) , columna 5, líneas 21-27; 1-3 columna 5, línea 33 - columna 7, línea 16; columna 8, líneas 4-9, A 4-12 X WO A1 (COMPUTER MOTION INC) , reivindicaciones; 1 figuras. A 2-12 X WO A1 (INTUITIVE SURGICAL INC) , 1 reivindicaciones 1,17; figuras. A 2-12 Categoría de los documentos citados X: de particular relevancia Y: de particular relevancia combinado con otro/s de la misma categoría A: refleja el estado de la técnica O: referido a divulgación no escrita P: publicado entre la fecha de prioridad y la de presentación de la solicitud E: documento anterior, pero publicado después de la fecha de presentación de la solicitud El presente informe ha sido realizado para todas las reivindicaciones para las reivindicaciones n : Fecha de realización del informe Examinador Página A. Cardenas Villar 1/1
 01.12.1993, columna 5, líneas 21-27; 1-3 columna 5, línea 33 - columna 7, línea 16; columna 8, líneas 4-9,34-37.")
Int. Cl.: 74 Agente: Ungría López, Javier
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 361 129 1 Int. Cl.: B2J 1/00 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número de solicitud europea: 078289. 96 Fecha de
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 361 129 1 Int. Cl.: B2J 1/00 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número de solicitud europea: 078289. 96 Fecha de
11 knúmero de publicación: 2 127 379. 51 kint. Cl. 6 : B25J 9/04
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 127 379 51 kint. Cl. 6 : B25J 9/04 B25J 9/10 B25J 18/00 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 127 379 51 kint. Cl. 6 : B25J 9/04 B25J 9/10 B25J 18/00 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea:
ES 2 257 890 A1 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA. 11 Número de publicación: 2 257 890. 21 Número de solicitud: 200202551
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 257 890 21 Número de solicitud: 200202551 51 Int. Cl. 7 : F16H 29/14 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación: 20.01.2005
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 257 890 21 Número de solicitud: 200202551 51 Int. Cl. 7 : F16H 29/14 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación: 20.01.2005
Int. Cl. 7 : A63H 29/22
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 177 43 21 k Número de solicitud: 20000293 1 k Int. Cl. 7 : A63H 29/22 A63H 17/26 A63H 18/12 k 12 SOLICITUD DE PATENTE A1
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 177 43 21 k Número de solicitud: 20000293 1 k Int. Cl. 7 : A63H 29/22 A63H 17/26 A63H 18/12 k 12 SOLICITUD DE PATENTE A1
ES 2 170 023 A1. Número de publicación: 2 170 023 PATENTES Y MARCAS. Número de solicitud: 200002844. Int. Cl. 7 : A41C 5/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 170 023 21 k Número de solicitud: 200002844 51 k Int. Cl. 7 : A41C 5/00 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 170 023 21 k Número de solicitud: 200002844 51 k Int. Cl. 7 : A41C 5/00 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
Una vez descrita la constitución general de un robot, podemos empezar con la
 CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
TIPOS DE RESTRICCIONES
 RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
11 Número de publicación: 2 284 312. 21 Número de solicitud: 200500732. 51 Int. Cl.: 72 Inventor/es: Gubertini Ciriza, Raúl
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 284 312 21 Número de solicitud: 200500732 51 Int. Cl.: B65F 1/00 (2006.01) 12 PATENTE DE INVENCIÓN B1 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 284 312 21 Número de solicitud: 200500732 51 Int. Cl.: B65F 1/00 (2006.01) 12 PATENTE DE INVENCIÓN B1 22 Fecha de presentación:
ES 2 147 081 A1 B22C 13/00. Número de publicación: 2 147 081 PATENTES Y MARCAS. Número de solicitud: 009700998. Int. Cl. 7 : B22C 9/00 16.08.
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 147 081 21 k Número de solicitud: 009700998 51 k Int. Cl. 7 : B22C 9/00 B22C 13/00 k 12 SOLICITUD DE PATENTE A1 22 kfecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 147 081 21 k Número de solicitud: 009700998 51 k Int. Cl. 7 : B22C 9/00 B22C 13/00 k 12 SOLICITUD DE PATENTE A1 22 kfecha
ES 2 146 184 A1. Número de publicación: 2 146 184 PATENTES Y MARCAS. Número de solicitud: 009802270. Int. Cl. 7 : A62C 27/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 146 184 21 k Número de solicitud: 009802270 51 k Int. Cl. 7 : A62C 27/00 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 146 184 21 k Número de solicitud: 009802270 51 k Int. Cl. 7 : A62C 27/00 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
11 kn. de publicación: ES 2 082 185. 51 kint. Cl. 6 : G06K 7/10. k 72 Inventor/es: Bengtsson, Kjell. k 74 Agente: Alvarez López, Fernando
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 N. de publicación: ES 2 082 18 1 Int. Cl. 6 : G06K 7/ 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 9180072.9 86 Fecha de presentación
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 N. de publicación: ES 2 082 18 1 Int. Cl. 6 : G06K 7/ 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 9180072.9 86 Fecha de presentación
ES 2 188 353 A1. Número de publicación: 2 188 353 PATENTES Y MARCAS. Número de solicitud: 200100507. Int. Cl. 7 : A61D 19/02
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 188 33 21 k Número de solicitud: 20010007 1 k Int. Cl. 7 : A61D 19/02 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 188 33 21 k Número de solicitud: 20010007 1 k Int. Cl. 7 : A61D 19/02 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
ES 2 302 587 A1 H04Q 7/22 (2006.01) G06F 9/445 (2006.01) OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA. 11 Número de publicación: 2 302 587
 G06F 9/445 (2006.01) OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA. 11 Número de publicación: 2 302 587") 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 302 587 21 Número de solicitud: 200503019 51 Int. Cl.: H04Q 7/22 (2006.01) G06F 9/445 (2006.01) 12 SOLICITUD DE PATENTE A1 22
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 302 587 21 Número de solicitud: 200503019 51 Int. Cl.: H04Q 7/22 (2006.01) G06F 9/445 (2006.01) 12 SOLICITUD DE PATENTE A1 22
Estos elementos mecánicos suelen ir montados sobre los ejes de transmisión, que son piezas cilíndricas sobre las cuales se colocan los mecanismos.
 MECANISMOS A. Introducción. Un mecanismo es un dispositivo que transforma el movimiento producido por un elemento motriz (fuerza de entrada) en un movimiento deseado de salida (fuerza de salida) llamado
MECANISMOS A. Introducción. Un mecanismo es un dispositivo que transforma el movimiento producido por un elemento motriz (fuerza de entrada) en un movimiento deseado de salida (fuerza de salida) llamado
ES 2 444 916 T3 DESCRIPCIÓN
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 444 916 1 Int. CI.: F41A 23/34 (06.01) F41G /06 (06.01) F41G 3/04 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Fecha de presentación
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 444 916 1 Int. CI.: F41A 23/34 (06.01) F41G /06 (06.01) F41G 3/04 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Fecha de presentación
SERVOMOTORES. Los servos se utilizan frecuentemente en sistemas de radiocontrol, mecatrónicos y robótica, pero su uso no está limitado a estos.
 SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
ES 1 055 491 U. Número de publicación: 1 055 491 PATENTES Y MARCAS. Número de solicitud: U 200302034. Int. Cl. 7 : A47F 5/13
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 055 491 21 k Número de solicitud: U 200302034 51 k Int. Cl. 7 : A47F 5/13 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 055 491 21 k Número de solicitud: U 200302034 51 k Int. Cl. 7 : A47F 5/13 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha
ES 2 230 956 A1 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA. 11 Número de publicación: 2 230 956. 21 Número de solicitud: 200202096
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 230 956 21 Número de solicitud: 200202096 51 Int. Cl. 7 : B23Q 11/00 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación: 12.09.2002
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 230 956 21 Número de solicitud: 200202096 51 Int. Cl. 7 : B23Q 11/00 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación: 12.09.2002
Examen de TEORIA DE MAQUINAS Junio 94 Nombre...
 Examen de TEORIA DE MAQUINAS Junio 94 Nombre... El robot plano de la figura transporta en su extremo una masa puntual de magnitud 5M a velocidad constante horizontal de valor v. Cada brazo del robot tiene
Examen de TEORIA DE MAQUINAS Junio 94 Nombre... El robot plano de la figura transporta en su extremo una masa puntual de magnitud 5M a velocidad constante horizontal de valor v. Cada brazo del robot tiene
CUADERNILLO DE PRACTICA-5: Trenes de engranajes ordinarios. Análisis de una caja de velocidad:
 CUADERNILLO DE PRACTICA-5: Trenes de engranajes ordinarios. Análisis de una caja de velocidad: Alumno:.. DNI:.. Fecha:... Por el profesor de la práctica.-rafael Sánchez Sánchez NOTA: Este cuadernillo debrá
CUADERNILLO DE PRACTICA-5: Trenes de engranajes ordinarios. Análisis de una caja de velocidad: Alumno:.. DNI:.. Fecha:... Por el profesor de la práctica.-rafael Sánchez Sánchez NOTA: Este cuadernillo debrá
11 Número de publicación: 2 336 732. 21 Número de solicitud: 200700040. 51 Int. Cl.: 74 Agente: No consta
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 336 732 21 Número de solicitud: 200700040 51 Int. Cl.: B60N 2/28 (2006.01) 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 336 732 21 Número de solicitud: 200700040 51 Int. Cl.: B60N 2/28 (2006.01) 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
ES 1 014 579 U. Número de publicación: 1 014 579 REGISTRO DE LA PROPIEDAD INDUSTRIAL. Número de solicitud: U 9002117. Int. Cl.
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 014 79 21 k Número de solicitud: U 9002117 1 k Int. Cl. : B62B 9/08 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 014 79 21 k Número de solicitud: U 9002117 1 k Int. Cl. : B62B 9/08 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
ES 1 052 253 U. Número de publicación: 1 052 253 PATENTES Y MARCAS. Número de solicitud: U 200201055. Int. Cl. 7 : B60R 11/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 02 23 21 k Número de solicitud: U 2002010 1 k Int. Cl. 7 : B60R 11/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 02 23 21 k Número de solicitud: U 2002010 1 k Int. Cl. 7 : B60R 11/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de
Int. Cl. 7 : A01B 63/10. 22 kfecha de presentación: 21.04.1995 71 k Solicitante/s: SOPHIPAT P de la Castellana, 123 28046 Madrid, ES
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 14 944 21 k Número de solicitud: 00900776 1 k Int. Cl. 7 : A01B 63/10 A01B 63/32 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 14 944 21 k Número de solicitud: 00900776 1 k Int. Cl. 7 : A01B 63/10 A01B 63/32 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
11 Número de publicación: 2 258 896. 21 Número de solicitud: 200401297. 51 Int. Cl.: 72 Inventor/es: Etxagibel Alberdi, Pedro
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 28 896 21 Número de solicitud: 200401297 1 Int. Cl.: E0B 47/06 (2006.01) 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 28 896 21 Número de solicitud: 200401297 1 Int. Cl.: E0B 47/06 (2006.01) 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
Int. Cl. 6 : B60L 1/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 069 474 21 k Número de solicitud: 9301266 51 k Int. Cl. 6 : B60L 1/00 B60K 15/00 k 12 SOLICITUD DE PATENTE A2 22 kfecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 069 474 21 k Número de solicitud: 9301266 51 k Int. Cl. 6 : B60L 1/00 B60K 15/00 k 12 SOLICITUD DE PATENTE A2 22 kfecha de
ES 1 097 480 U ESPAÑA 11. Número de publicación: 1 097 480. Número de solicitud: 201331388 A47G 29/00 (2006.01) 03.12.2013
 03.12.2013") 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 21 Número de publicación: 1 097 480 Número de solicitud: 1331388 1 Int. CI.: A47G 29/00 (06.01) 12 SOLICITUD DE MODELO DE UTILIDAD U 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 21 Número de publicación: 1 097 480 Número de solicitud: 1331388 1 Int. CI.: A47G 29/00 (06.01) 12 SOLICITUD DE MODELO DE UTILIDAD U 22 Fecha de presentación:
11 Número de publicación: 2 211 340. 21 Número de solicitud: 200202975. 51 Int. Cl. 7 : B62H 5/00. 72 Inventor/es: Alonso Atienza, Pelayo
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 211 340 21 Número de solicitud: 200202975 51 Int. Cl. 7 : B62H 5/00 A42B 3/04 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 211 340 21 Número de solicitud: 200202975 51 Int. Cl. 7 : B62H 5/00 A42B 3/04 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
Int. Cl. 7 : A01G 25/02
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 184 605 21 k Número de solicitud: 200100858 51 k Int. Cl. 7 : A01G 25/02 A01G 25/06 k 12 SOLICITUD DE PATENTE A1 22 kfecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 184 605 21 k Número de solicitud: 200100858 51 k Int. Cl. 7 : A01G 25/02 A01G 25/06 k 12 SOLICITUD DE PATENTE A1 22 kfecha
ES 1 091 133 U ESPAÑA 11. Número de publicación: 1 091 133. Número de solicitud: 201300385 E01C 19/12 (2006.01) 18.04.2013
 18.04.2013") 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 21 Número de publicación: 1 091 133 Número de solicitud: 201300385 51 Int. CI.: E01C 19/12 (2006.01) 12 SOLICITUD DE MODELO DE UTILIDAD U 22 Fecha de
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 21 Número de publicación: 1 091 133 Número de solicitud: 201300385 51 Int. CI.: E01C 19/12 (2006.01) 12 SOLICITUD DE MODELO DE UTILIDAD U 22 Fecha de
ES 2 192 897 A1 B42F 5/00. Número de publicación: 2 192 897 PATENTES Y MARCAS. Número de solicitud: 200000528. Int. Cl. 7 : B42D 1/08 16.10.
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 192 897 21 k Número de solicitud: 200000528 51 k Int. Cl. 7 : B42D 1/08 B42F 5/00 k 12 SOLICITUD DE PATENTE A1 22 kfecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 192 897 21 k Número de solicitud: 200000528 51 k Int. Cl. 7 : B42D 1/08 B42F 5/00 k 12 SOLICITUD DE PATENTE A1 22 kfecha
Int. Cl. 6 : F16C 11/04
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 133 06 21 k Número de solicitud: 9601130 1 k Int. Cl. 6 : F16C 11/04 A61G 7/002 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 133 06 21 k Número de solicitud: 9601130 1 k Int. Cl. 6 : F16C 11/04 A61G 7/002 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
Muchas veces hemos visto un juego de billar y no nos percatamos de los movimientos de las bolas (ver gráfico 8). Gráfico 8
. Gráfico 8") Esta semana estudiaremos la definición de vectores y su aplicabilidad a muchas situaciones, particularmente a las relacionadas con el movimiento. Por otro lado, se podrán establecer las características
Esta semana estudiaremos la definición de vectores y su aplicabilidad a muchas situaciones, particularmente a las relacionadas con el movimiento. Por otro lado, se podrán establecer las características
Int. Cl. 6 : B23C 1/08. 22 kfecha de presentación: 22.07.94 71 k Solicitante/s: Noran S.L. C. Saconi, 18 Arriegas Erandio, Vizcaya, ES
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 118 016 21 k Número de solicitud: 9401634 1 k Int. Cl. 6 : B23C 1/08 B23C 1/16 B23Q 3/10 k 12 SOLICITUD DE PATENTE A1 22
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 118 016 21 k Número de solicitud: 9401634 1 k Int. Cl. 6 : B23C 1/08 B23C 1/16 B23Q 3/10 k 12 SOLICITUD DE PATENTE A1 22
Propuesta de Portal de la Red de Laboratorios Virtuales y Remotos de CEA
 Propuesta de Portal de la Red de Laboratorios Virtuales y Remotos de CEA Documento de trabajo elaborado para la Red Temática DocenWeb: Red Temática de Docencia en Control mediante Web (DPI2002-11505-E)
Propuesta de Portal de la Red de Laboratorios Virtuales y Remotos de CEA Documento de trabajo elaborado para la Red Temática DocenWeb: Red Temática de Docencia en Control mediante Web (DPI2002-11505-E)
ES 2 388 275 B1. Aviso: ESPAÑA 11. Número de publicación: 2 388 275. Número de solicitud: 201130353 H04B 7/00 (2006.01)
") 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 21 Número de publicación: 2 388 27 Número de solicitud: 20113033 1 Int. CI.: H04B 7/00 (2006.01) 12 PATENTE DE INVENCIÓN B1 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 21 Número de publicación: 2 388 27 Número de solicitud: 20113033 1 Int. CI.: H04B 7/00 (2006.01) 12 PATENTE DE INVENCIÓN B1 22 Fecha de presentación:
11 Número de publicación: 2 321 587. 51 Int. Cl.: 72 Inventor/es: Kunigita, Hisayuki. 74 Agente: Elzaburu Márquez, Alberto
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 321 587 51 Int. Cl.: G06T 11/60 (2006.01) G06T 15/00 (2006.01) G06Q 30/00 (2006.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 321 587 51 Int. Cl.: G06T 11/60 (2006.01) G06T 15/00 (2006.01) G06Q 30/00 (2006.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número
ES 1 036 204 U. Número de publicación: 1 036 204 PATENTES Y MARCAS. Número de solicitud: U 9700152. Int. Cl. 6 : A63F 9/14
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 036 4 21 k Número de solicitud: U 970012 1 k Int. Cl. 6 : A63F 9/14 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 036 4 21 k Número de solicitud: U 970012 1 k Int. Cl. 6 : A63F 9/14 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de
Int. Cl. 7 : B23Q 5/04. 22 kfecha de presentación: 21.05.1997 71 k Solicitante/s: DANOBAT, S.Coop. Arriaga Kalea, 21 20870 Elgoibar, Guipúzcoa, ES
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 151 348 21 k Número de solicitud: 009701091 51 k Int. Cl. 7 : B23Q 5/04 F16H 57/02 k 12 SOLICITUD DE PATENTE A1 22 kfecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 151 348 21 k Número de solicitud: 009701091 51 k Int. Cl. 7 : B23Q 5/04 F16H 57/02 k 12 SOLICITUD DE PATENTE A1 22 kfecha
Int. Cl. 7 : G09F 15/00. 22 kfecha de presentación: 27.07.2001 71 k Solicitante/s: David Donoso Pía Paseo de la Castellana 70, local Madrid, ES
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 199 640 21 k Número de solicitud: 200101771 51 k Int. Cl. 7 : G09F 15/00 G09F 17/00 A47F 5/01 k 12 SOLICITUD DE PATENTE A1
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 199 640 21 k Número de solicitud: 200101771 51 k Int. Cl. 7 : G09F 15/00 G09F 17/00 A47F 5/01 k 12 SOLICITUD DE PATENTE A1
Int. Cl. 4 : G08B 7/06
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 004 707 21 k Número de solicitud: U 8700172 1 k Int. Cl. 4 : G08B 7/06 //A61G 17/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 004 707 21 k Número de solicitud: U 8700172 1 k Int. Cl. 4 : G08B 7/06 //A61G 17/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U
Int. Cl. 5 : B02C 18/06
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 017 058 21 k Número de solicitud: U 9100925 51 k Int. Cl. 5 : B02C 18/06 B02C 18/40 A01B 43/00 k 12 SOLICITUD DE MODELO DE
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 017 058 21 k Número de solicitud: U 9100925 51 k Int. Cl. 5 : B02C 18/06 B02C 18/40 A01B 43/00 k 12 SOLICITUD DE MODELO DE
ES 2 321 904 A1 F03B 13/18 (2006.01) OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA
 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA") 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 321 904 21 Número de solicitud: 200703487 51 Int. Cl.: F03B 13/18 (2006.01) 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 321 904 21 Número de solicitud: 200703487 51 Int. Cl.: F03B 13/18 (2006.01) 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
Int. Cl. 6 : E04G 1/26
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 131 445 21 k Número de solicitud: 9601472 51 k Int. Cl. 6 : E04G 1/26 A62B 1/16 E06C 7/18 k 12 SOLICITUD DE PATENTE A1 22
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 131 445 21 k Número de solicitud: 9601472 51 k Int. Cl. 6 : E04G 1/26 A62B 1/16 E06C 7/18 k 12 SOLICITUD DE PATENTE A1 22
B23K 23/00 //E01B 29/42 B60M 5/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 036 42 21 k Número de solicitud: 91412 1 k Int. Cl. : H01R 4/02 B23K 23/00 //E01B 29/42 BM /00 k 12 SOLICITUD DE PATENTE A2
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 036 42 21 k Número de solicitud: 91412 1 k Int. Cl. : H01R 4/02 B23K 23/00 //E01B 29/42 BM /00 k 12 SOLICITUD DE PATENTE A2
Definición de vectores
 Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen: O también denominado Punto de aplicación. Es el punto exacto sobre
Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen: O también denominado Punto de aplicación. Es el punto exacto sobre
11 Número de publicación: 2 275 622. 51 Int. Cl.: 72 Inventor/es: Fast, Peder. 74 Agente: Isern Jara, Jorge
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 27 622 1 Int. Cl.: H04Q 7/32 (06.01) G07F 7/12 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 01272427.4
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 27 622 1 Int. Cl.: H04Q 7/32 (06.01) G07F 7/12 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 01272427.4
Formularios. Formularios Diapositiva 1
 Formularios Crear un formulario utilizando el Asistente para formularios Modificación en vista Diseño Adición de Controles a un Formulario Adición de un Subformulario a un formulario Formularios Diapositiva
Formularios Crear un formulario utilizando el Asistente para formularios Modificación en vista Diseño Adición de Controles a un Formulario Adición de un Subformulario a un formulario Formularios Diapositiva
k 11 N. de publicación: ES 2 015 463 k 21 Número de solicitud: 8903166 k 51 Int. Cl. 5 : A63F 3/06 k 73 Titular/es: Vaprel, S.A.
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 015 463 k 21 Número de solicitud: 8903166 k 51 Int. Cl. 5 : A63F 3/06 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 015 463 k 21 Número de solicitud: 8903166 k 51 Int. Cl. 5 : A63F 3/06 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
IAP 1005 - CONSIDERACIONES PARTICULARES SOBRE LA AUDITORÍA DE LAS EMPRESAS DE REDUCIDA DIMENSIÓN
 IAP 1005 - CONSIDERACIONES PARTICULARES SOBRE LA AUDITORÍA DE LAS EMPRESAS DE REDUCIDA DIMENSIÓN Introducción 1. Las Normas Internacionales de Auditoría (NIA) se aplican a la auditoría de la información
IAP 1005 - CONSIDERACIONES PARTICULARES SOBRE LA AUDITORÍA DE LAS EMPRESAS DE REDUCIDA DIMENSIÓN Introducción 1. Las Normas Internacionales de Auditoría (NIA) se aplican a la auditoría de la información
UNIVERSIDAD DE SALAMANCA
 UNIVERSIDAD DE SALAMANCA FACULTAD DE CIENCIAS INGENIERÍA TÉCNICA EN INFORMÁTICA DE SISTEMAS Resumen del trabajo práctico realizado para la superación de la asignatura Proyecto Fin de Carrera. TÍTULO SISTEMA
UNIVERSIDAD DE SALAMANCA FACULTAD DE CIENCIAS INGENIERÍA TÉCNICA EN INFORMÁTICA DE SISTEMAS Resumen del trabajo práctico realizado para la superación de la asignatura Proyecto Fin de Carrera. TÍTULO SISTEMA
11 knúmero de publicación: 2 141 353. 51 kint. Cl. 6 : F16H 37/04. Número de solicitud europea: 95919718.7 86 kfecha de presentación : 12.05.
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 141 33 1 kint. Cl. 6 : F16H 37/04 F16H 7/02 B2J 18/00 B2J 9/ H02K 7/116 12 k TRADUCCION DE PATENTE EUROPEA T3 86 k Número
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 141 33 1 kint. Cl. 6 : F16H 37/04 F16H 7/02 B2J 18/00 B2J 9/ H02K 7/116 12 k TRADUCCION DE PATENTE EUROPEA T3 86 k Número
Operación Microsoft Access 97
 Trabajar con Controles Características de los controles Un control es un objeto gráfico, como por ejemplo un cuadro de texto, un botón de comando o un rectángulo que se coloca en un formulario o informe
Trabajar con Controles Características de los controles Un control es un objeto gráfico, como por ejemplo un cuadro de texto, un botón de comando o un rectángulo que se coloca en un formulario o informe
3.9. Tutorial Excavadora
 3.9. Tutorial Excavadora 3.9.1. Introducción En este tutorial se va a simular el funcionamiento de una retroexcavadora. Como se sabe, el movimiento de una excavadora está gobernado por unos cilindros hidráulicos,
3.9. Tutorial Excavadora 3.9.1. Introducción En este tutorial se va a simular el funcionamiento de una retroexcavadora. Como se sabe, el movimiento de una excavadora está gobernado por unos cilindros hidráulicos,
- MANUAL DE USUARIO -
 - MANUAL DE USUARIO - Aplicación: Kz Precio Hora Instagi Instagi Teléfono: 943424465-943466874 Email: instagi@instagi.com GUIA PROGRAMA CALCULO PRECIO HORA 1. Introducción 2. Datos de la empresa 2.1.Gastos
- MANUAL DE USUARIO - Aplicación: Kz Precio Hora Instagi Instagi Teléfono: 943424465-943466874 Email: instagi@instagi.com GUIA PROGRAMA CALCULO PRECIO HORA 1. Introducción 2. Datos de la empresa 2.1.Gastos
ES 2 197 008 A1. Número de publicación: 2 197 008 PATENTES Y MARCAS. Número de solicitud: 200201269. Int. Cl. 7 : A61D 19/02
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 197 008 21 k Número de solicitud: 200201269 1 k Int. Cl. 7 : A61D 19/02 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 197 008 21 k Número de solicitud: 200201269 1 k Int. Cl. 7 : A61D 19/02 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
11 Número de publicación: 2 288 447. 21 Número de solicitud: 200702102. 51 Int. Cl.: 72 Inventor/es: Cabre Roige, Luis
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 288 447 21 Número de solicitud: 200702102 51 Int. Cl.: A01G 9/02 (2006.01) A01G 27/04 (2006.01) 12 SOLICITUD DE PATENTE A2 22
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 288 447 21 Número de solicitud: 200702102 51 Int. Cl.: A01G 9/02 (2006.01) A01G 27/04 (2006.01) 12 SOLICITUD DE PATENTE A2 22
C02F 1/02 F28G 9/00 //A61L 11/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 060 38 21 k Número de solicitud: 9202661 1 k Int. Cl. : C02F 9/00 C02F 1/02 F28G 9/00 //A61L 11/00 k 12 SOLICITUD DE PATENTE
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 060 38 21 k Número de solicitud: 9202661 1 k Int. Cl. : C02F 9/00 C02F 1/02 F28G 9/00 //A61L 11/00 k 12 SOLICITUD DE PATENTE
ES 2 244 309 A1 E04D 1/36 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA. 11 Número de publicación: 2 244 309. 21 Número de solicitud: 200400215
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 244 309 21 Número de solicitud: 20040021 1 Int. Cl. 7 : B32B 27/32 E04D 1/36 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 244 309 21 Número de solicitud: 20040021 1 Int. Cl. 7 : B32B 27/32 E04D 1/36 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
Intérprete entre el Operador y el Ordenador.
 Introducción a Windows Generalidades Una computadora es un colaborador rápido y eficaz en la tarea administrativa de la información. La computadora en realidad es capaz de hacer muy pocas cosas, como ser:
Introducción a Windows Generalidades Una computadora es un colaborador rápido y eficaz en la tarea administrativa de la información. La computadora en realidad es capaz de hacer muy pocas cosas, como ser:
11 Número de publicación: 2 235 757. 51 Int. Cl. 7 : B21D 43/05. 74 Agente: Carvajal y Urquijo, Isabel
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 235 757 51 Int. Cl. 7 : B21D 43/05 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 00128237.5 86 Fecha de
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 235 757 51 Int. Cl. 7 : B21D 43/05 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 00128237.5 86 Fecha de
Int. Cl. 6 : D06H 7/22. 22 kfecha de presentación: 09.10.92 71 k Solicitante/s: Jose María Vilaro Alboquers C. Indústria, 4-6 Navarcles, Barcelona, ES
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 100 777 21 k Número de solicitud: 9202016 51 k Int. Cl. 6 : D06H 7/22 B29C 65/74 B29C 65/08 B26D 7/02 k 12 SOLICITUD DE PATENTE
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k N. de publicación: ES 2 100 777 21 k Número de solicitud: 9202016 51 k Int. Cl. 6 : D06H 7/22 B29C 65/74 B29C 65/08 B26D 7/02 k 12 SOLICITUD DE PATENTE
Ideas básicas sobre movimiento
 Ideas básicas sobre movimiento Todos conocemos por experiencia qué es el movimiento. En nuestra vida cotidiana, observamos y realizamos infinidad de movimientos. El desplazamiento de los coches, el caminar
Ideas básicas sobre movimiento Todos conocemos por experiencia qué es el movimiento. En nuestra vida cotidiana, observamos y realizamos infinidad de movimientos. El desplazamiento de los coches, el caminar
11 knúmero de publicación: 2 150 799. 51 kint. Cl. 7 : B65G 1/02
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 799 1 kint. Cl. 7 : B6G 1/02 A47B 47/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 98221.0 86
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 799 1 kint. Cl. 7 : B6G 1/02 A47B 47/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 98221.0 86
ES 2 187 295 A1 G06F 17/60. Número de publicación: 2 187 295 PATENTES Y MARCAS. Número de solicitud: 200102423. Int. Cl. 7 : G06F 19/00 16.05.
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 187 29 21 k Número de solicitud: 200102423 1 k Int. Cl. 7 : G06F 19/00 G06F 17/60 k 12 SOLICITUD DE PATENTE A1 22 kfecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 187 29 21 k Número de solicitud: 200102423 1 k Int. Cl. 7 : G06F 19/00 G06F 17/60 k 12 SOLICITUD DE PATENTE A1 22 kfecha
Redes inalámbricas. www.ruano.com Página 1. Qué es una red inalámbrica?
 Redes inalámbricas Qué es una red inalámbrica? Una red inalámbrica es un sistema de comunicación de datos que proporciona conexión inalámbrica entre equipos situados dentro de la misma área (interior o
Redes inalámbricas Qué es una red inalámbrica? Una red inalámbrica es un sistema de comunicación de datos que proporciona conexión inalámbrica entre equipos situados dentro de la misma área (interior o
6. SISTEMAS CAD-CAM (CAM) 6.1. CONCEPTO DE CAM
 6.1. CONCEPTO DE CAM") 6.1. CONCEPTO DE CAM Las siglas CAM corresponden al acrónimo de Computer Aided Manufacturing, Fabricación asistida por ordenador. Por CAM se entiende la utilización de ordenadores para tareas técnicas
6.1. CONCEPTO DE CAM Las siglas CAM corresponden al acrónimo de Computer Aided Manufacturing, Fabricación asistida por ordenador. Por CAM se entiende la utilización de ordenadores para tareas técnicas
Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9
 Por Guillermo Martín Díaz Alumno de: 1º Ingeniería Informática Curso 2005/2006 ËQGLFH Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9 2 0RWRUHVGH&RUULHQWHFRQWLQXD Son los mas
Por Guillermo Martín Díaz Alumno de: 1º Ingeniería Informática Curso 2005/2006 ËQGLFH Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9 2 0RWRUHVGH&RUULHQWHFRQWLQXD Son los mas
Int. Cl. 6 : B42D 15/10. k 71 Solicitante/s: Juan Antonio García Geira. k 72 Inventor/es: García Geira, Juan Antonio
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 117 949 21 k Número de solicitud: 9601769 1 k Int. Cl. 6 : B42D 1/10 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 117 949 21 k Número de solicitud: 9601769 1 k Int. Cl. 6 : B42D 1/10 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
Int. Cl. 5 : B66F 11/04. 22 kfecha de presentación: 12.03.90 73 k Titular/es: Mariano Marti Solé Avinguda Catalunya, s/n 25660 Alcoletge, Lerida, ES
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k N. de publicación: ES 2 020 884 21 k Número de solicitud: 9000741 1 k Int. Cl. : B66F 11/04 //A01D 46/00 k 12 PATENTEDEINVENCION A6 22 kfecha de presentación:
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k N. de publicación: ES 2 020 884 21 k Número de solicitud: 9000741 1 k Int. Cl. : B66F 11/04 //A01D 46/00 k 12 PATENTEDEINVENCION A6 22 kfecha de presentación:
Ajustes de sombras. 1) Añadir localización
 Añadir localización") Ajustes de sombras El cuadro de diálogo "Ajustes de sombras" se utiliza para controlar las funciones de proyección de sombras de SketchUp, incluyendo su visibilidad, la fecha y la hora, la posición geográfica
Ajustes de sombras El cuadro de diálogo "Ajustes de sombras" se utiliza para controlar las funciones de proyección de sombras de SketchUp, incluyendo su visibilidad, la fecha y la hora, la posición geográfica
k 11 N. de publicación: ES 2 047 221 k 51 Int. Cl. 5 : G01R 21/133
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 047 221 k 1 Int. Cl. : G01R 21/133 G11C 7/00 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 90116348.
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 047 221 k 1 Int. Cl. : G01R 21/133 G11C 7/00 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 90116348.
k 11 N. de publicación: ES 2 029 423 k 21 Número de solicitud: 9100664 k 51 Int. Cl. 5 : A61F 15/00
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 029 423 k 21 Número de solicitud: 9100664 k 1 Int. Cl. : A61F 1/00 G06M 1/272 k 12 PATENTEDEINVENCION A6 22 kfecha de presentación:
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 029 423 k 21 Número de solicitud: 9100664 k 1 Int. Cl. : A61F 1/00 G06M 1/272 k 12 PATENTEDEINVENCION A6 22 kfecha de presentación:
Apoyo para la preparación de los estudios de Ingeniería y Arquitectura Física (Preparación a la Universidad) Unidad 4: Vectores
 Unidad 4: Vectores") Apoyo para la preparación de los estudios de Ingeniería y Arquitectura Física (Preparación a la Universidad) Unidad 4: Vectores Universidad Politécnica de Madrid 5 de marzo de 2010 2 4.1. Planificación
Apoyo para la preparación de los estudios de Ingeniería y Arquitectura Física (Preparación a la Universidad) Unidad 4: Vectores Universidad Politécnica de Madrid 5 de marzo de 2010 2 4.1. Planificación
ES 1 055 617 U. Número de publicación: 1 055 617 PATENTES Y MARCAS. Número de solicitud: U 200302165. Int. Cl. 7 : A43B 7/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 0 617 21 k Número de solicitud: U 0216 1 k Int. Cl. 7 : A43B 7/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 0 617 21 k Número de solicitud: U 0216 1 k Int. Cl. 7 : A43B 7/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
Int. Cl. 7 : B65D 83/06
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 183 690 21 k Número de solicitud: 200002275 51 k Int. Cl. 7 : B65D 83/06 B65D 25/38 A47K 5/10 k 12 SOLICITUD DE PATENTE A1
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 183 690 21 k Número de solicitud: 200002275 51 k Int. Cl. 7 : B65D 83/06 B65D 25/38 A47K 5/10 k 12 SOLICITUD DE PATENTE A1
ES 1 016 726 U. Número de publicación: 1 016 726 REGISTRO DE LA PROPIEDAD INDUSTRIAL. Número de solicitud: U 9100270. Int. Cl.
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 016 726 21 k Número de solicitud: U 9100270 1 k Int. Cl. : B42F 19/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 016 726 21 k Número de solicitud: U 9100270 1 k Int. Cl. : B42F 19/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de
Guía de instalación de la carpeta Datos de IslaWin
 Guía de instalación de la carpeta Datos de IslaWin Para IslaWin Gestión CS, Classic o Pyme a partir de la revisión 7.00 (Revisión: 10/11/2011) Contenido Introducción... 3 Acerca de este documento... 3
Guía de instalación de la carpeta Datos de IslaWin Para IslaWin Gestión CS, Classic o Pyme a partir de la revisión 7.00 (Revisión: 10/11/2011) Contenido Introducción... 3 Acerca de este documento... 3
ES 2 190 724 A1. Número de publicación: 2 190 724 PATENTES Y MARCAS. Número de solicitud: 200100359. Int. Cl. 7 : A61H 1/02
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 190 724 21 k Número de solicitud: 200100359 51 k Int. Cl. 7 : A61H 1/02 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 190 724 21 k Número de solicitud: 200100359 51 k Int. Cl. 7 : A61H 1/02 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes
 Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes RESUMEN Investigadores de la Universidad
Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes RESUMEN Investigadores de la Universidad
51 Int. CI.: H04W 4/12 (2009.01) TRADUCCIÓN DE PATENTE EUROPEA
 TRADUCCIÓN DE PATENTE EUROPEA") 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 466 64 1 Int. CI.: H04W 4/18 (09.01) H04W 4/12 (09.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Fecha de presentación y número
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 466 64 1 Int. CI.: H04W 4/18 (09.01) H04W 4/12 (09.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Fecha de presentación y número
k 11 N. de publicación: ES 2 012 852 k 21 Número de solicitud: 8802912 k 51 Int. Cl. 4 : G07F 17/32 k 73 Titular/es: Ainsworth Nominees Pty.
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 012 852 k 21 Número de solicitud: 8802912 k 51 Int. Cl. 4 : G07F 17/32 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 012 852 k 21 Número de solicitud: 8802912 k 51 Int. Cl. 4 : G07F 17/32 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
ES 2 211 260 A1 A47B 81/00 A63B 57/00 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA. más reducido. 11 Número de publicación: 2 211 260
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 211 260 21 Número de solicitud: 2001026 1 Int. Cl. 7 : A63B 71/00 A47B 81/00 A63B 7/00 12 SOLICITUD DE PATENTE A1 22 Fecha de
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 211 260 21 Número de solicitud: 2001026 1 Int. Cl. 7 : A63B 71/00 A47B 81/00 A63B 7/00 12 SOLICITUD DE PATENTE A1 22 Fecha de
Int. Cl. 7 : B28B 7/22
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 161 621 21 k Número de solicitud: 00990196 1 k Int. Cl. 7 : B28B 7/22 B28B 7/36 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 161 621 21 k Número de solicitud: 00990196 1 k Int. Cl. 7 : B28B 7/22 B28B 7/36 k 12 SOLICITUD DE PATENTE A1 22 kfecha de
11 kn. de publicación: ES 2 076 749. 51 kint. Cl. 6 : B23F 15/06
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 kn. de publicación: ES 2 076 749 1 kint. Cl. 6 : B23F 1/06 B23F 23/12 B23F 21/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 kn. de publicación: ES 2 076 749 1 kint. Cl. 6 : B23F 1/06 B23F 23/12 B23F 21/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea:
ES 2 181 595 A1. Número de publicación: 2 181 595 PATENTES Y MARCAS. Número de solicitud: 200101432. Int. Cl. 7 : A61C 8/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 181 595 21 k Número de solicitud: 200101432 51 k Int. Cl. 7 : A61C 8/00 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 181 595 21 k Número de solicitud: 200101432 51 k Int. Cl. 7 : A61C 8/00 k 12 SOLICITUD DE PATENTE A1 k 22 Fecha de presentación:
11 Número de publicación: 2 222 084. 21 Número de solicitud: 200301076. 51 Int. Cl. 7 : H04L 12/28. 72 Inventor/es: Zarraga Ochoa, Igor
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 222 084 21 Número de solicitud: 200301076 51 Int. Cl. 7 : H04L 12/28 H04Q 7/24 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 222 084 21 Número de solicitud: 200301076 51 Int. Cl. 7 : H04L 12/28 H04Q 7/24 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación:
NOTAS TÉCNICAS SOBRE EL SIT: Documentos de Gestión
 NOTAS TÉCNICAS SOBRE EL SIT: Documentos de Gestión Introducción...2 Tipos de documentos...2 Datos de Cabecera...3 Nuevo Documento... 3 Modificar Documento... 4 Añadir, modificar y eliminar Artículos...5
NOTAS TÉCNICAS SOBRE EL SIT: Documentos de Gestión Introducción...2 Tipos de documentos...2 Datos de Cabecera...3 Nuevo Documento... 3 Modificar Documento... 4 Añadir, modificar y eliminar Artículos...5
Int. Cl. 7 : B25B 9/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 044 872 21 k Número de solicitud: U 009902862 1 k Int. Cl. 7 : B2B 9/00 A61F 4/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 044 872 21 k Número de solicitud: U 009902862 1 k Int. Cl. 7 : B2B 9/00 A61F 4/00 k 12 SOLICITUD DE MODELO DE UTILIDAD U
 Expresión Gráfica. 16 Otros dispositivos de almacenamiento de información son: los compact disc, con capacidad hasta 650 Megabytes, y las unidades zip que pueden almacenar 100 ó 250 Megabytes, según modelos.
Expresión Gráfica. 16 Otros dispositivos de almacenamiento de información son: los compact disc, con capacidad hasta 650 Megabytes, y las unidades zip que pueden almacenar 100 ó 250 Megabytes, según modelos.
11 Número de publicación: 2 256 996. 51 Int. Cl. 7 : B31B 19/74
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 26 996 1 Int. Cl. 7 : B31B 19/74 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99120740.8 86 Fecha de presentación
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 26 996 1 Int. Cl. 7 : B31B 19/74 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99120740.8 86 Fecha de presentación
MANUAL DE AYUDA HERRAMIENTA DE APROVISIONAMIENTO
 MANUAL DE AYUDA HERRAMIENTA DE APROVISIONAMIENTO Fecha última revisión: Junio 2011 INDICE DE CONTENIDOS HERRAMIENTA DE APROVISIONAMIENTO... 3 1. QUÉ ES LA HERRAMIENTA DE APROVISIONAMIENTO... 3 HERRAMIENTA
MANUAL DE AYUDA HERRAMIENTA DE APROVISIONAMIENTO Fecha última revisión: Junio 2011 INDICE DE CONTENIDOS HERRAMIENTA DE APROVISIONAMIENTO... 3 1. QUÉ ES LA HERRAMIENTA DE APROVISIONAMIENTO... 3 HERRAMIENTA
11 knúmero de publicación: 2 128 845. 51 kint. Cl. 6 : B25H 1/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 128 845 51 kint. Cl. 6 : B25H 1/00 B66F 7/08 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 96909035.6
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 128 845 51 kint. Cl. 6 : B25H 1/00 B66F 7/08 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 96909035.6
ES 2 264 860 A1 G07C 9/00 (2006.01) H04M 1/725 (2006.01) H04M 11/00 (2006.01) OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA
 H04M 1/725 (2006.01) H04M 11/00 (2006.01) OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA") 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 264 860 21 Número de solicitud: 200402000 51 Int. Cl.: G07C 9/00 (2006.01) H04M 1/725 (2006.01) H04M 11/00 (2006.01) 12 SOLICITUD
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 264 860 21 Número de solicitud: 200402000 51 Int. Cl.: G07C 9/00 (2006.01) H04M 1/725 (2006.01) H04M 11/00 (2006.01) 12 SOLICITUD
Int. Cl. 7 : A62C 13/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 149 67 21 k Número de solicitud: 009800216 1 k Int. Cl. 7 : A62C 13/00 A62C 13/62 A62C 13/76 k 12 SOLICITUD DE PATENTE A1
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 2 149 67 21 k Número de solicitud: 009800216 1 k Int. Cl. 7 : A62C 13/00 A62C 13/62 A62C 13/76 k 12 SOLICITUD DE PATENTE A1
1. Vectores 1.1. Definición de un vector en R2, R3 (Interpretación geométrica), y su generalización en Rn.
, y su generalización en Rn.") 1. VECTORES INDICE 1.1. Definición de un vector en R 2, R 3 (Interpretación geométrica), y su generalización en R n...2 1.2. Operaciones con vectores y sus propiedades...6 1.3. Producto escalar y vectorial
1. VECTORES INDICE 1.1. Definición de un vector en R 2, R 3 (Interpretación geométrica), y su generalización en R n...2 1.2. Operaciones con vectores y sus propiedades...6 1.3. Producto escalar y vectorial
PLANEAMIENTO DE LAS COMUNICACIONES EN EMERGENCIAS REDES PRIVADAS DISPONIBLES EN EMERGENCIAS TELEFONÍA VÍA SATÉLITE. Índice
 Índice 1. REDES PRIVADAS. TELEFONÍA VIA SATÉLITE...2 1.1 SERVICIOS VIA SATELITE... 2 1.1.1 SATELITES GEOESTACIONARIOS... 2 1.1.2 Satelites no Geoestacionarios... 4 1.1.2.1 CARACTERÍSTICAS...4 1.1.2.2 TIPOS.
Índice 1. REDES PRIVADAS. TELEFONÍA VIA SATÉLITE...2 1.1 SERVICIOS VIA SATELITE... 2 1.1.1 SATELITES GEOESTACIONARIOS... 2 1.1.2 Satelites no Geoestacionarios... 4 1.1.2.1 CARACTERÍSTICAS...4 1.1.2.2 TIPOS.
2.11.1 CONTRATAS Y SUBCONTRATAS NOTAS
 NOTAS 1 Cuando en un mismo centro de trabajo desarrollen actividades trabajadores de dos o más empresas, éstas deberán cooperar en la aplicación de la normativa sobre prevención de riesgos laborales. A
NOTAS 1 Cuando en un mismo centro de trabajo desarrollen actividades trabajadores de dos o más empresas, éstas deberán cooperar en la aplicación de la normativa sobre prevención de riesgos laborales. A
TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO
 TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO Introducción.- Asanza,V 1 ; Laica,J 1 ; Paillacho,D 1 1. Centro de Visión y Robotica {vasanza, jlaica, dpailla} @fiec.espol.edu.ec Un
TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO Introducción.- Asanza,V 1 ; Laica,J 1 ; Paillacho,D 1 1. Centro de Visión y Robotica {vasanza, jlaica, dpailla} @fiec.espol.edu.ec Un
CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN. Figura 4.1.Caja Negra. Generar. Sistema de control. Acumular. Figura 4.2. Diagrama de funciones
 CAPÍTULO 4 37 CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN Para diseñar el SGE, lo primero que se necesita es plantear diferentes formas en las que se pueda resolver el problema para finalmente decidir
CAPÍTULO 4 37 CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN Para diseñar el SGE, lo primero que se necesita es plantear diferentes formas en las que se pueda resolver el problema para finalmente decidir