6. Análisis en el dominio de la frecuencia. Teoría de Control
|
|
|
- Marta Martínez Herrera
- hace 8 años
- Vistas:
Transcripción
1 6. Análisis en el dominio de la frecuencia Teoría de Control

2 Introducción El término respuesta en frecuencia, indica la respuesta en estado estacionario de un sistema a una entrada senoidal. La respuesta en frecuencia se obtiene mediante generadores y buenos medidores de señales. En el análisis de la frecuencia, los métodos no están restringidos al orden de la función. Permite medir la sensibilidad al ruido y la variación de parámetros. 2

3 Respuesta en frecuencia Los métodos empleados en respuesta en frecuencia son: Nyquist y Bode. r(t) S.L.I.T. y(t) Si la entrada en la figura es: r(t) = R sen ω0t La salida será: y(t) = R sen ( ω0t + φ ) 3
 Si la entrada en la figura es: r(t) = R sen")
4 Respuesta en la frecuencia Aplicando Laplace Y(s) = M(s)R(s) Para realizar el análisis en el estado senoidal permanente s=jω Y(jω) = M(jω) R(jω) Y(jω) = Y(jω) < Y(jω) donde Y(jω) = M(jω) R(jω) <Y(jω) = <M(jω) +<R(jω) 4
 < Y(jω) donde Y(jω) = M(jω) R(jω) <Y(jω) =")
5 Y (S ) R(S ) Respuesta en frecuencia de un lazo retroalimentado Y ( s) G( S ) M ( s) = = R( s) 1 + G ( S ) H ( S ) Para el estado senoidal permanente s=jω Y ( jω ) G ( jω ) M ( jω ) = = R ( jω ) 1 + G ( jω ) H ( jω ) M ( jω ) = M ( jω ) M ( jω ) 5
 M ( jω ) = = R ( jω ) 1 + G ( jω ) H ( jω ) M ( jω ) = M (")
6 Respuesta en frecuencia de un lazo retroalimentado En términos de su parte real e imaginaria: M(jω) = Re [M(jω)] + j Im [M(jω)] La magnitud de M(jω) es: G ( jω ) M ( jω ) = 1 + G ( jω ) H ( jω ) Y el ángulo es: M ( jω ) = G ( jω ) (1 + G ( jω ) H ( jω )) 6
![[M(jω)] La magnitud de M(jω) es: G ( jω ) M ( jω ) = 1 + G ( jω](/docs-images/40/11633593/images/page_6.jpg ") H ( jω ) Y el ángulo es: M ( jω ) = G ( jω ) (1 + G ( jω ) H")
7 Respuesta en frecuencia de un lazo retroalimentado Sí M(s) representa la función de transferencia de entrada-salida de un filtro eléctrico, la magnitud y fase M(jω) indican las características del filtro sobre la señal de entrada. Esta figura muestra las características de ganancia y fase de un filtro pasa-bajas ideal con frecuencia de corte en ωc. Sí ωc se incrementa en forma indefinida, la salida Y(jω) podría ser idéntica a la entrada MC Jacob J. Vásquez Sanjuanpara todas las frecuencias. 7
 podría ser idéntica a la entrada MC Jacob J.")
8 Respuesta en frecuencia de un lazo retroalimentado En sistemas de control el controlador además de responder a la señal de entrada, debe ser capaz de rechazar y suprimir el ruido y las señales no deseadas. 8

9 Especificaciones en el dominio de la frecuencia Las siguientes especificaciones se emplean en la práctica. Pico de resonancia M. r Frecuencia de resonancia ωr. Ancho de banda (BW). 9

10 Especificaciones en el dominio de la frecuencia 10

11 Magnitud en función de la frecuencia normalizada (ω/ωn) 11


12 Respuesta en el tiempo 12

13 Mr en función del factor de amortiguamiento relativo 13

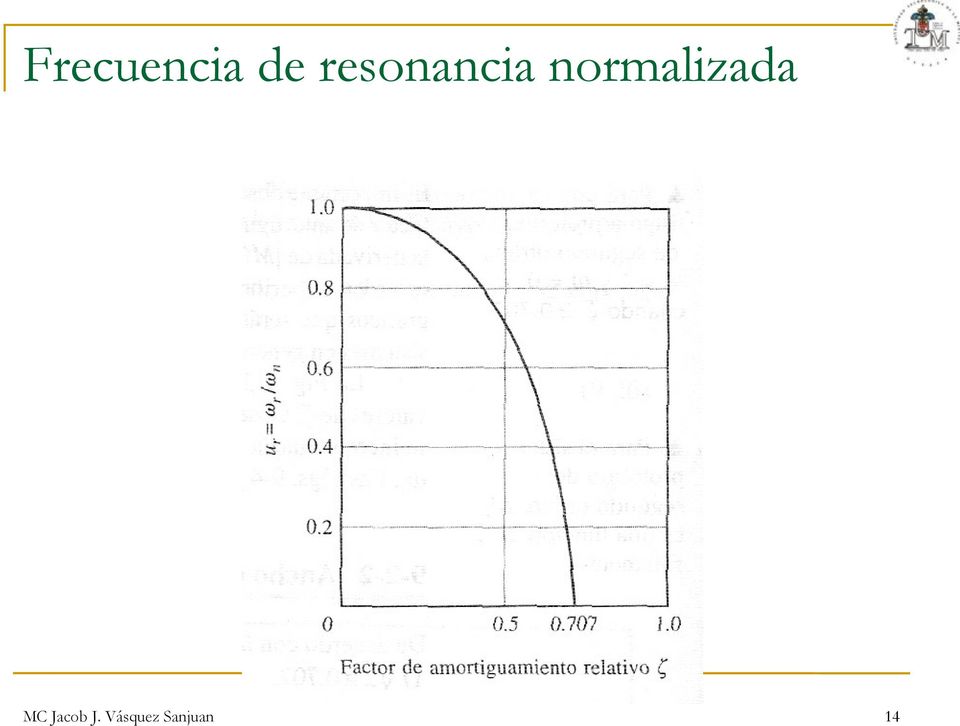
14 Frecuencia de resonancia normalizada 14
15 Ancho de banda en función del factor de amortiguamiento 15

16 Relaciones entre los dominios del tiempo y la frecuencia El pico de resonancia Mr de la respuesta en frecuencia en lazo cerrado depende de ζ solamente. El ancho de banda es directamente proporcional a ωn. También el BW disminuye con el incremento de ζ. Ya que el tiempo de levantamiento aumenta cuando ωn disminuye, el BW y el tiempo de levantamiento son inversamente proporcionales. El ancho de banda y Mr son proporcionales entre sí para 0 ζ

17 Relaciones frecuencia-tiempo ω s + 2ζ ω s + ω 2 r(t) n 2 2 n y(t) n Cuando ωn se hace más grande, la distancia del polo al origen se hace mayor. Cuando ζ se hace más grande, la distancia angular desde el eje real negativo se hace más pequeña. 17

18 Relaciones frecuencia - tiempo ξ ξ t ω 2 r BW = ω [ (1 2ξ ) + 2 n 4ξ 2ξ + 2 ] n Cuando ωn se hace mayor, tr disminuye y el sistema responde más rápido. Cuando ωn se incrementa el ancho de banda se incrementa. Cuando ξ se hace mayor tr se incrementa y el sistema se hace más lento Cuando ξ se incrementa el ancho de banda se reduce. 18

19 Efectos de la adición de un cero en la función de transferencia de la trayectoria directa ω (1 + T s ) M ( s) = s + ( 2ξ ω + T ω ) s + ω n Z 2 2 n Z n 2 n 19
 s + ω n Z 2 2 n Z")
 T=5 G( s) = 1 + Ts s ( s + 1.")
20 Efectos de la respuesta en frecuencia con la adición de un cero T=0 T=0.1 T=1.0 T=1.414 M(jw) T=5 G( s) = 1 + Ts s ( s ) w(rad/seg) 20
 T=5 G( s) = 1 + Ts s ( s")

21 Respuesta en el tiempo (adición de un cero) T=0 T= = T Cuando T se hace más grande, el cero de la función de transferencia en lazo cerrado, s=1/t,se mueve muy cerca del origen causando que el sistema tenga constantes de tiempo muy grandes. Por tal razón el tiempo de levantamiento es rápido, pero la constante de tiempo larga del cero cercano al origen del plano s causa que el tiempo de asentamiento sea mayor. 21
22 El efecto general de añadir un cero a la función de transferencia de la trayectoria directa es incrementar el ancho de banda del sistema en lazo cerrado. 22
23 Efecto de la adición de un polo en la función de transferencia de la trayectoria directa 2 ωn Y (S ) ωn s ( s + 2ξ ω n ) = = 2 2 R( S ) ωn TpS 3 + S 2 (1 + 2ξ ω ntp ) + 2ξ ω ntp + ω n 1+ (1 + TpS )( S + 2ξ ω n ) S 23
24 Respuesta en frecuencia G( s) = 1 s( s )(1 + Ts ) 24
25 Respuesta en el tiempo G( s) = 1 s( s )(1 + Ts ) 25
26 6.3 Criterio de estabilidad de Nyquist Características del criterio de Nyquist: Proporciona información de la estabilidad relativa. La traza de Nyquist de G(s)H(s) es fácil de obtener. La traza de Nyquist da información de las características en el dominio de la frecuencia: Mr, Wr y BW. Las trazas de Nyquist es útil para sistemas con retardos puros. 26
27 Encierro e Inclusión Un punto o una región en un plano de una función compleja se dice encerrado por una trayectoria cerrada si está dentro de la trayectoria. Un punto o región se dice incluido por una trayectoria cerrada si está encerado en la dirección SCMR, o el punto o región está a la izquierda de la trayectoria cuando ésta se recorren en la dirección prescrita. A B AA B 27
28 Funciones de fase mínima Una función de transferencia de fase mínima no tiene polos o ceros en el semiplano derecho del plano s o sobre el eje jw (sólo un polo en el origen). El valor de la función de transferencia de fase mínima no puede ser cero o infinito en ninguna frecuencia distinta de cero. Siempre tendrá un corrimiento de fase más positivo cuando w varía desde a 0. O igualmente cierto siempre tendrá una fase más negativa cuadno w varía de o hasta. Para una función de transferencia de fase mínima L(s) con m ceros y n polos, cuando s=jw, y w varía desde a 0, la variación total en fase es (n-m)π/2 radianes. 28
29 Criterio de Nyquist para sistemas con función de transferencia de fase mínima Para un sistema de lazo cerrado con función de transferencia de lazo L(s), que es de tipo de fase mínima, el sistema es estable si la gráfica de L(s) que corresponde a la trayectoria de Nyquist no encierra al punto (-1, j0), si el punto (-1, j0) está encerrado por la traza de Nyquist, el sistema es inestable. 29
 = s( s + 2)( s + 10)")
30 Ejemplo K L( s ) = G ( s ) H ( s ) = s( s + 2)( s + 10) 30
31 Criterio de estabilidad de Nyquist para funciones de transferencia de fase no mínima y mínima Para que el sistema en lazo cerrado sea estable, Z debe ser igual a cero. Por tanto el criterio de Nyquist para la estabilidad del sistema en lazo cerrado es: Φ11=-(0.5Pw+ P)180 Donde: Z = número de ceros de 1+L(s) que están en el semiplano derecho del plano s. P = número de polos de 1+L(s) que están en el semiplano derecho del plano s. Pw= número de polos de L(s) o de 1+L(s) que están sobre el eje jw, incluyendo los del origen. 31
32 Relación entre las trazas de nyquist y las respuestas al escalón y en frecuencias 32
33 Relación entre las trazas de nyquist y las respuestas al escalón y en frecuencias 33
34 Margen de ganancia El margen de ganancia (GM) es uno de los criterios más usados par medir la estabilidad relativa. El cruce de fase es un punto en el cual la traza se intersecta con el eje real negativo. La frecuencia de cruce de fase ωp es la frecuencia en el cruce de la fase, o donde: Cruce de fase ω=ωp L( jω p ) =
35 1 Margen de ganancia = GM = 20 log10 = 20 log10 L( jω p ) L( jω p ) Conclusiones: La traza L(jωp) no intercepta al eje real negativo: L(jωp) = 0 GM = db La traza L(jωp) intercepta al eje real negativo entre el 0 y el punto < L(jωp) < 1 GM > 0 db La traza L(jωp) pasa por (-1, j0) L(jωp) = 1 GM = 0 db 7. La traza L(jωp) encierra al punto (-1, j0) L(jωp) > 1 GM < 0 db 35
36 Margen de ganancia El margen de ganancia es la cantidad en db que se puede añadir al lazo antes de que el sistema de lazo cerrado se vuelva inestable. 1 Margen de ganancia = GM = 20 log10 = 20 log10 L( jω p ) L( jω p ) 36
37 Margen de fase El margen de fase (PM) es la cantidad de retardo puro que se puede añadir al sistema antes de que el sistema en lazo cerrado se vuelva inestable. Margen de Para sistemas de fase mínima: fase PM = L( jω g )
38 Ejemplo Encuentre los márgenes de ganancia y de fase, de la función de transferencia de lazo de un sistema de control : 2500 L( s ) = s( s + 5)( s + 50) 38
39 Solución 39
40 6.4 Análisis de estabilidad con las trazas de Bode Ventajas: Se pueden obtener sin necesidad de una computadora, mediante segmentos de línea recta. El cruce de ganancia, el cruce de fase, el margen de ganancia y el margen de fase se determinan más fácilmente en las trazas de Bode que en la traza de Nyquist. Para propósitos de diseño, los efectos de añadir controladores y sus parámetros se visualizan con mayor facilidad sobre las trazas de Bode que sobre las de Nyquist. 40
41 Gráficas de Bode : Sistemas de fase mínima y no mínima. Los sistemas de fase mínima son los cuales no tienen polos ni ceros en el semiplano derecho del plano s. Los sistemas de fase no mínima son los que tienen polos y/o ceros en el semiplano derecho del plano s. 41
42 Diagramas de Bode: determinación de sistemas de fase mínima y no mínima. Un sistema de fase mínima tiene una pendiente de la curva de magnitud logaritmica cuando ω tiende a infinito de -20(n-m) db/década. Donde m y n son los ordenes del númerador y denominador, respectivamente, (n m). debe Por otra parte el ángulo de fase en ω=, ser igual a -90 (n-m). Si lo anterior no se cumple el sistema es de fase no mínima. 42

43 Margen de ganancia y fase en las trazas de Bode Región estable para intersección Sobre la curva de fase en el cruce De fase; margen de fase positivo. 43
44 Observaciones sobre la estabilidad del sistema respecto a las propiedades de la traza de Bode El margen de ganancia es positivo y el sistema es estable si la magnitud de M(jω) al cruce de fase es negativo en db. Esto es, el margen de ganancia se mide abajo del eje 0 db. Si el margen se mide arriba del eje 0 db, el margen de ganancia es negativo y el sistema es inestable. El margen de fase es positivo y el sistema es estable si la fase de M(jω) es mayor que -180 en el cruce de ganancia. Esto es, el margen de fase se mide arriba del eje Si el margen se mide abajo del eje -180, el margen de fase es negativo, y el sistema es inestable. 44
45 Margen de fase y de ganancia: Definición El margen de ganancia se define como: 1 GM =20 log10 = 20 log10 L j p L j p El margen de fase (PM) se define asi: PM = L j g
46 Ejemplo del comando margin M( s ) = 2500 s( s + 5 )( s + 50 ) B o d e D ia g r a m G m = d B ( a t ra d / s e c ), P m = d e g (a t r a d / s e c ) 50 M a g n i tu d e ( d B ) P h a s e (d e g ) F r e q u e n c y ( r a d /s e c )
47 Diagrama de Bode de sistemas con retardos puros El efecto del retardo puro (retardo de transporte) es añadir una fase T d radianes a la curva de fase, sin afectar la curva de magnitud. Ejemplo : Encuentre el tiempo crítico de retardo, del siguiente sistema: Ke Td s L( s ) = s( s + 1 )( s + 2 ) 47

48 Respuesta sin retardo 48
49 Efectos del retardo El retardo añade una fase de -ωtd radianes en la curva de fase sin afectar la curva de magnitud. Para encontrar el valor crítico del tiempo de retardo para la estabilidad se tiene: π T ω = d despejando: g 53.4 (π ) T = = 2.09 seg 180 (1.414) d 49
50 Ejemplo: Para el ejemplo anterior encuentre el valor crítico de K, si el tiempo de retardo es de 1 segundo. 50
51 De la figura anterior se puede observar que el margen de ganancia es de 4.5 db y la frecuencia de cruce de fase es de 0.66 rad/s. Empleando la definición de margen de ganancia, Y despejando: GM = 20 log L( jω ) / 20 p = 1.68 por lo tanto este es el valor crítico de K para estabilidad. la 51
ESTUDIO DE LA ESTABILIDAD EN EL DOMINIO FRECUENCIAL
 ESTUDIO DE LA ESTABILIDAD EN EL DOMINIO FRECUENCIAL 1.-Introducción. 2.-Criterio de estabilidad de Nyquist. 3.-Estabilidad relativa. 3.1.-Margen de ganancia. 3.2.-Margen de fase. 4.-Estabilidad mediante
ESTUDIO DE LA ESTABILIDAD EN EL DOMINIO FRECUENCIAL 1.-Introducción. 2.-Criterio de estabilidad de Nyquist. 3.-Estabilidad relativa. 3.1.-Margen de ganancia. 3.2.-Margen de fase. 4.-Estabilidad mediante
ESTUDIO DE LA ESTABILIDAD EN EL DOMINIO FRECUENCIAL
 TEMA X ESTUDIO DE LA ESTABILIDAD EN EL DOMINIO FRECUENCIAL 1.-Introducción..-Criterio de estabilidad de Nyquist. 3.-Estabilidad relativa. 3.1.-Margen de ganancia. 3..-Margen de fase. 4.-Estabilidad mediante
TEMA X ESTUDIO DE LA ESTABILIDAD EN EL DOMINIO FRECUENCIAL 1.-Introducción..-Criterio de estabilidad de Nyquist. 3.-Estabilidad relativa. 3.1.-Margen de ganancia. 3..-Margen de fase. 4.-Estabilidad mediante
Introducción. Culminación de todos los anteriores capítulos. Tipos de compensación. Acción de control. Tipos de acción:
 DISEÑO DE SISTEMAS DE CONTROL 1.-Introducción. 2.-El problema del diseño. 3.-Tipos de compensación. 4.-Reguladores. 4.1.-Acción Proporcional. Reguladores P. 4.2.-Acción Derivativa. Reguladores PD. 4.3.-Acción
DISEÑO DE SISTEMAS DE CONTROL 1.-Introducción. 2.-El problema del diseño. 3.-Tipos de compensación. 4.-Reguladores. 4.1.-Acción Proporcional. Reguladores P. 4.2.-Acción Derivativa. Reguladores PD. 4.3.-Acción
Dominio de la Frecuencia
 Dominio de la Frecuencia Sistemas Electrónicos de Control Álvaro Gutiérrez 17 de Marzo de 2015 aguti@etsit.upm.es www.robolabo.etsit.upm.es Índice 1 Introducción 2 Representaciones Gráficas Diagrama de
Dominio de la Frecuencia Sistemas Electrónicos de Control Álvaro Gutiérrez 17 de Marzo de 2015 aguti@etsit.upm.es www.robolabo.etsit.upm.es Índice 1 Introducción 2 Representaciones Gráficas Diagrama de
Automá ca. Ejercicios Capítulo7.2.AnálisisFrecuencial(Parte2)
") Automáca Ejercicios Capítulo7..AnálisisFrecuencial(Parte) JoséRamónLlataGarcía EstherGonzálezSarabia DámasoFernándezPérez CarlosToreFerero MaríaSandraRoblaGómez DepartamentodeTecnologíaElectrónica eingenieríadesistemasyautomáca
Automáca Ejercicios Capítulo7..AnálisisFrecuencial(Parte) JoséRamónLlataGarcía EstherGonzálezSarabia DámasoFernándezPérez CarlosToreFerero MaríaSandraRoblaGómez DepartamentodeTecnologíaElectrónica eingenieríadesistemasyautomáca
17. DOMINIO FRECUENCIA CRITERIO DE BODE
 327 17. DOMINIO FRECUENCIA CRITERIO DE BODE 17.1 INTRODUCCION Las técnicas para analizar la respuesta de un sistema en el dominio de la frecuencia son las más populares para el análisis y diseño del control
327 17. DOMINIO FRECUENCIA CRITERIO DE BODE 17.1 INTRODUCCION Las técnicas para analizar la respuesta de un sistema en el dominio de la frecuencia son las más populares para el análisis y diseño del control
Diseño de sistemas de control. Teoría de control
 Diseño de sistemas de control Teoría de control Introducción Para iniciar el proceso de diseño de un sistema de control, es necesario realizar los siguientes pasos:... Determine que debe hacer el sistema
Diseño de sistemas de control Teoría de control Introducción Para iniciar el proceso de diseño de un sistema de control, es necesario realizar los siguientes pasos:... Determine que debe hacer el sistema
REGULACIÓN AUTOMATICA (7)
") REGULACIÓN AUTOMATICA (7) (Respuesta en frecuencia Bode) Escuela Politécnica Superior Profesor: Darío García Rodríguez CONCEPTOS UTILES Definición de Decibelios.- La necesidad de comparar magnitudes en
REGULACIÓN AUTOMATICA (7) (Respuesta en frecuencia Bode) Escuela Politécnica Superior Profesor: Darío García Rodríguez CONCEPTOS UTILES Definición de Decibelios.- La necesidad de comparar magnitudes en
Determinación experimental de la respuesta en frecuencia
 Determinación experimental de la respuesta en frecuencia Análisis Dinámico de Sistemas (Teleco) Área de Ingeniería de Sistemas y Automática Escuela Politécnica Superior de Ingeniería Gijón Universidad
Determinación experimental de la respuesta en frecuencia Análisis Dinámico de Sistemas (Teleco) Área de Ingeniería de Sistemas y Automática Escuela Politécnica Superior de Ingeniería Gijón Universidad
INDICE 1. Introducción 1.2. Qué es Realimentación y Cuáles son sus Efectos? 1.3. Tipos de Sistemas de Control Realimentado
 INDICE Prefacio XIX Prefacio al Software de Computadora para Sistemas de Control XXII 1. Introducción 1 1.1. Introducción 1 1.1.1. Componentes básicos de un sistema de control 2 1.1.2. Ejemplos de aplicaciones
INDICE Prefacio XIX Prefacio al Software de Computadora para Sistemas de Control XXII 1. Introducción 1 1.1. Introducción 1 1.1.1. Componentes básicos de un sistema de control 2 1.1.2. Ejemplos de aplicaciones
E.T.S.I. INDUSTRIAL DE BEJAR UNIVERSIDAD DE SALAMANCA CAPITULO
 Análisis en el dominio de la frecuencia 121 E.T.S.I. INDUSTRIAL DE BEJAR UNIVERSIDAD DE SALAMANCA CAPITULO 9 ANALISIS EN EL DOMINIO DE LA FRECUENCIA 122 Problemas de ingeniería de control RESPUESTA FRECUENCIAL
Análisis en el dominio de la frecuencia 121 E.T.S.I. INDUSTRIAL DE BEJAR UNIVERSIDAD DE SALAMANCA CAPITULO 9 ANALISIS EN EL DOMINIO DE LA FRECUENCIA 122 Problemas de ingeniería de control RESPUESTA FRECUENCIAL
Test de ejercicios de auto-evaluación del módulo 2 Lecciones 3 y 4
 Test de ejercicios de auto-evaluación del módulo Lecciones 3 y 4 1) La Figura B muestra la respuesta de un sistema de segundo orden ante una entrada de tipo escalón De qué tipo de sistema se trata?.4 Step
Test de ejercicios de auto-evaluación del módulo Lecciones 3 y 4 1) La Figura B muestra la respuesta de un sistema de segundo orden ante una entrada de tipo escalón De qué tipo de sistema se trata?.4 Step
Electrónica Analógica Respuesta en frecuencia. Transformada de Laplace
 Electrónica Analógica espuesta en frecuencia. Transformada de Laplace Transformada de Laplace. Introducción La transformada de Laplace es una herramienta matemática muy útil en electrónica ya que gracias
Electrónica Analógica espuesta en frecuencia. Transformada de Laplace Transformada de Laplace. Introducción La transformada de Laplace es una herramienta matemática muy útil en electrónica ya que gracias
Diseño de controladores en el dominio de la frecuencia
 Práctica 5 Diseño de controladores en el dominio de la frecuencia Sistemas Automáticos, EPSIG Abril 2007 1. Requisitos previos Los requisitos enumerados a continuación son imprescindibles para el adecuado
Práctica 5 Diseño de controladores en el dominio de la frecuencia Sistemas Automáticos, EPSIG Abril 2007 1. Requisitos previos Los requisitos enumerados a continuación son imprescindibles para el adecuado
PRÁCTICA DE GABINETE DE COMPUTACIÓN Nº 2
 Universidad Nacional de San Juan - Facultad de Ingeniería DEPARTAMENTO DE ELECTRONICA Y AUTOMATICA Carrera: Bioingeniería Área CONTROL Asignatura: CONTROL I PRÁCTICA DE GABINETE DE COMPUTACIÓN Nº ANÁLISIS
Universidad Nacional de San Juan - Facultad de Ingeniería DEPARTAMENTO DE ELECTRONICA Y AUTOMATICA Carrera: Bioingeniería Área CONTROL Asignatura: CONTROL I PRÁCTICA DE GABINETE DE COMPUTACIÓN Nº ANÁLISIS
Diseño en el dominio de la frecuencia
 Diseño en el dominio de la frecuencia Tema 7 1 Índice Respuesta frecuencial en bucle cerrado Red de adelanto de fase Red de atraso de fase Compensación de adelanto-atraso 2 Respuesta frecuencial en Bucle
Diseño en el dominio de la frecuencia Tema 7 1 Índice Respuesta frecuencial en bucle cerrado Red de adelanto de fase Red de atraso de fase Compensación de adelanto-atraso 2 Respuesta frecuencial en Bucle
No hay resorte que oscile cien años...
 No hay resorte que oscile cien años... María Paula Coluccio y Patricia Picardo Laboratorio I de Física para Biólogos y Geólogos Depto. de Física, FCEyN, UBA - 1999 Resumen: En el presente trabajo nos proponemos
No hay resorte que oscile cien años... María Paula Coluccio y Patricia Picardo Laboratorio I de Física para Biólogos y Geólogos Depto. de Física, FCEyN, UBA - 1999 Resumen: En el presente trabajo nos proponemos
Análisis de Sistemas Lineales: segunda parte
 UCV, Facultad de Ingeniería, Escuela de Ingeniería Eléctrica. Análisis de Sistemas Lineales: segunda parte Ebert Brea 7 de marzo de 204 Contenido. Análisis de sistemas en el plano S 2. Análisis de sistemas
UCV, Facultad de Ingeniería, Escuela de Ingeniería Eléctrica. Análisis de Sistemas Lineales: segunda parte Ebert Brea 7 de marzo de 204 Contenido. Análisis de sistemas en el plano S 2. Análisis de sistemas
Circuito RL, Respuesta a la frecuencia.
 Circuito RL, Respuesta a la frecuencia. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se estudia
Circuito RL, Respuesta a la frecuencia. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se estudia
ANÁLISIS EN EL DOMINIO DE LA FRECUENCIA
 TEMA VII ANÁLISIS EN EL DOMINIO DE LA FRECUENCIA.-Introducción..-Respuesta en frecuencia...-diagrama cero-polar. 3.-Representación gráfica de la respuesta en frecuencia. 3..-Diagramas de Bode. 3..-Diagrama
TEMA VII ANÁLISIS EN EL DOMINIO DE LA FRECUENCIA.-Introducción..-Respuesta en frecuencia...-diagrama cero-polar. 3.-Representación gráfica de la respuesta en frecuencia. 3..-Diagramas de Bode. 3..-Diagrama
Características de funciones que son inversas de otras
 Características de funciones que son inversas de otras Si f es una función inyectiva, llamamos función inversa de f y se representa por f 1 al conjunto. f 1 = a, b b, a f} Es decir, f 1 (x, y) = { x =
Características de funciones que son inversas de otras Si f es una función inyectiva, llamamos función inversa de f y se representa por f 1 al conjunto. f 1 = a, b b, a f} Es decir, f 1 (x, y) = { x =
DISEÑO DE SISTEMAS DE CONTROL
 TEMA XI DISEÑO DE SISTEMAS DE CONTROL 1.-Introducción. 2.-El problema del diseño. 3.-Tipos de compensación. 4.-Reguladores. 4.1.-Acción Proporcional. Reguladores P. 4.2.-Acción Derivativa. Reguladores
TEMA XI DISEÑO DE SISTEMAS DE CONTROL 1.-Introducción. 2.-El problema del diseño. 3.-Tipos de compensación. 4.-Reguladores. 4.1.-Acción Proporcional. Reguladores P. 4.2.-Acción Derivativa. Reguladores
Sistemas de Primer y Segundo Orden
 Sistemas de Primer y Segundo Orden Oscar Duarte Facultad de Ingeniería Universidad Nacional de Colombia p./66 Sistema Continuo. er Orden Un sistema continuo de primer orden, cuya función de transferencia
Sistemas de Primer y Segundo Orden Oscar Duarte Facultad de Ingeniería Universidad Nacional de Colombia p./66 Sistema Continuo. er Orden Un sistema continuo de primer orden, cuya función de transferencia
Introducción a los sistemas de control
 Introducción a los sistemas de control Sistema Un sistema es una combinación de componentes que actúan juntos y realizan un objetivo determinado A un sistema se le puede considerar como una caja negra
Introducción a los sistemas de control Sistema Un sistema es una combinación de componentes que actúan juntos y realizan un objetivo determinado A un sistema se le puede considerar como una caja negra
UNIDAD 4: PLANO CARTESIANO, RELACIONES Y FUNCIONES. OBJETIVO DE APRENDIZAJE: Representar gráficamente relaciones y funciones en el plano cartesiano.
 UNIDAD 4: PLANO CARTESIANO, RELACIONES Y FUNCIONES OBJETIVO DE APRENDIZAJE: Representar gráficamente relaciones y funciones en el plano cartesiano. EL PLANO CARTESIANO. El plano cartesiano está formado
UNIDAD 4: PLANO CARTESIANO, RELACIONES Y FUNCIONES OBJETIVO DE APRENDIZAJE: Representar gráficamente relaciones y funciones en el plano cartesiano. EL PLANO CARTESIANO. El plano cartesiano está formado
2 Electrónica Analógica
 TEMA II Electrónica Analógica Electrónica II 2009-2010 2 Electrónica Analógica 2.1 Amplificadores Operacionales. 2 2 A li i d l A lifi d O i l 2.2 Aplicaciones de los Amplificadores Operacionales. 2.3
TEMA II Electrónica Analógica Electrónica II 2009-2010 2 Electrónica Analógica 2.1 Amplificadores Operacionales. 2 2 A li i d l A lifi d O i l 2.2 Aplicaciones de los Amplificadores Operacionales. 2.3
Fig 4-7 Curva característica de un inversor real
 Clase 15: Criterios de Comparación de Familias Lógicas. Características del Inversor Real Cuando comenzamos a trabajar con un inversor real comienzan a aparecer algunos inconvenientes que no teníamos en
Clase 15: Criterios de Comparación de Familias Lógicas. Características del Inversor Real Cuando comenzamos a trabajar con un inversor real comienzan a aparecer algunos inconvenientes que no teníamos en
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION
 CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
1. Funciones y sus gráficas
 FUNCIONES 1. Funciones sus gráficas Función es una relación entre dos variables a las que, en general se les llama e. es la variable independiente. es la variable dependiente. La función asocia a cada
FUNCIONES 1. Funciones sus gráficas Función es una relación entre dos variables a las que, en general se les llama e. es la variable independiente. es la variable dependiente. La función asocia a cada
Funciones definidas a trozos
 Concepto de función Dominio de una función Características de las funciones Intersecciones con los ejes Crecimiento y decrecimiento Máximos y mínimos Continuidad y discontinuidad Simetrías Periodicidad
Concepto de función Dominio de una función Características de las funciones Intersecciones con los ejes Crecimiento y decrecimiento Máximos y mínimos Continuidad y discontinuidad Simetrías Periodicidad
Señal de Referencia: Es el valor que se desea que alcance la señal de salida. SET POINT.
 EL ABC DE LA AUTOMATIZACION ALGORITMO DE CONTROL PID; por Aldo Amadori Introducción El Control automático desempeña un papel importante en los procesos de manufactura, industriales, navales, aeroespaciales,
EL ABC DE LA AUTOMATIZACION ALGORITMO DE CONTROL PID; por Aldo Amadori Introducción El Control automático desempeña un papel importante en los procesos de manufactura, industriales, navales, aeroespaciales,
EXAMEN DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA 02/09/2008
 EXAMEN DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA 2/9/28 EJERCICIO I (25%) Se dispone de un ventilador de cuatro velocidades. Dichas velocidades son accionadas respectivamente por la señales V, V2, V, V4.
EXAMEN DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA 2/9/28 EJERCICIO I (25%) Se dispone de un ventilador de cuatro velocidades. Dichas velocidades son accionadas respectivamente por la señales V, V2, V, V4.
Practica 2 Filtro Activo Butterworth Pasa-Banda de Segundo Orden
 Universidad de San Carlos de Guatemala Facultad de Ingeniería Escuela de Mecánica Eléctrica Laboratorio de Electrónica Electrónica 4 Segundo Semestre 2015 Auxiliar: Estuardo Toledo Practica 2 Filtro Activo
Universidad de San Carlos de Guatemala Facultad de Ingeniería Escuela de Mecánica Eléctrica Laboratorio de Electrónica Electrónica 4 Segundo Semestre 2015 Auxiliar: Estuardo Toledo Practica 2 Filtro Activo
Capítulo I. Convertidores de CA-CD y CD-CA
 Capítulo I. Convertidores de CA-CD y CD-CA 1.1 Convertidor CA-CD Un convertidor de corriente alterna a corriente directa parte de un rectificador de onda completa. Su carga puede ser puramente resistiva,
Capítulo I. Convertidores de CA-CD y CD-CA 1.1 Convertidor CA-CD Un convertidor de corriente alterna a corriente directa parte de un rectificador de onda completa. Su carga puede ser puramente resistiva,
Anexo 3.1 Respuesta en Frecuencia: Filtros
 ELC-333 Teoría de Control Anexo 3. : Filtros Prof. Francisco M. Gonzalez-Longatt fglongatt@ieee.org http://www.giaelec.org/fglongatt/sp.htm . Filtros Se denomina filtro a un circuito sensible a la frecuencia
ELC-333 Teoría de Control Anexo 3. : Filtros Prof. Francisco M. Gonzalez-Longatt fglongatt@ieee.org http://www.giaelec.org/fglongatt/sp.htm . Filtros Se denomina filtro a un circuito sensible a la frecuencia
2 año secundario. Función Lineal MINISTERIO DE EDUCACIÓN. Se llama función lineal porque la potencia de la x es 1. Su gráfico es una recta.
 año secundario Función Lineal Se llama función lineal porque la potencia de la x es. Su gráfico es una recta. Y en general decimos que es de la forma : f(x)= a. x + b donde a y b son constantes, a recibe
año secundario Función Lineal Se llama función lineal porque la potencia de la x es. Su gráfico es una recta. Y en general decimos que es de la forma : f(x)= a. x + b donde a y b son constantes, a recibe
Osciloscopio Funciones
 Uso del osciloscopio para determinar las formas de onda Uno de los procedimientos para realizar diagnósticos acertados, en las reparaciones automotrices, es el buen uso del osciloscopio. Este instrumento
Uso del osciloscopio para determinar las formas de onda Uno de los procedimientos para realizar diagnósticos acertados, en las reparaciones automotrices, es el buen uso del osciloscopio. Este instrumento
PROBLEMA. Diseño de un DIMMER.
 PROBLEMA Diseño de un DIMMER. Solución, como las especificaciones vistas en clase fueron muy claras el DIMMER controlara la velocidad de los disparos que se harán en la compuerta de el tiristor, es decir
PROBLEMA Diseño de un DIMMER. Solución, como las especificaciones vistas en clase fueron muy claras el DIMMER controlara la velocidad de los disparos que se harán en la compuerta de el tiristor, es decir
Método aproximado para conocer la localización de las raíces de la ecuación característica con respecto a los semiplanos izquierdo y derecho. (12.
 1. Criterio de estabilidad de Nyquist 1.1 Gráfica de Nyquist Gráfica de L(jω) G(jω)H(jω) en coordenadas polares de Im[L(jω)], Re[L(jω)] con ω variando desde hasta 0. Características: provee información
1. Criterio de estabilidad de Nyquist 1.1 Gráfica de Nyquist Gráfica de L(jω) G(jω)H(jω) en coordenadas polares de Im[L(jω)], Re[L(jω)] con ω variando desde hasta 0. Características: provee información
Introducción a la Teoría del Procesamiento Digital de Señales de Audio
 Introducción a la Teoría del Procesamiento Digital de Señales de Audio Transformada de Fourier Discreta Resumen Propiedades de la Transformada de Fourier Linealidad Comportamiento de la fase Naturaleza
Introducción a la Teoría del Procesamiento Digital de Señales de Audio Transformada de Fourier Discreta Resumen Propiedades de la Transformada de Fourier Linealidad Comportamiento de la fase Naturaleza
Unidad Orientativa (Electrónica) Amplificadores Operacionales
 Amplificadores Operacionales") Unidad Orientativa (Electrónica) 1 Amplificadores Operacionales Índice Temático 2 1. Que son los amplificadores operacionales? 2. Conociendo a los Amp. Op. 3. Parámetros Principales. 4. Circuitos Básicos
Unidad Orientativa (Electrónica) 1 Amplificadores Operacionales Índice Temático 2 1. Que son los amplificadores operacionales? 2. Conociendo a los Amp. Op. 3. Parámetros Principales. 4. Circuitos Básicos
Usos de un Analizador de Respuesta en Frecuencia
 Usos de un Analizador de Respuesta en Frecuencia La respuesta en frecuencia es la medida del espectro de salida de un sistema en respuesta a un estímulo. El análisis de respuesta en frecuencia mide la
Usos de un Analizador de Respuesta en Frecuencia La respuesta en frecuencia es la medida del espectro de salida de un sistema en respuesta a un estímulo. El análisis de respuesta en frecuencia mide la
Circuito RC, Respuesta a la frecuencia.
 Circuito RC, Respuesta a la frecuencia. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (13368) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se armó un
Circuito RC, Respuesta a la frecuencia. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (13368) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se armó un
solecméxico Circuitos de disparo 1 CIRCUITOS DE DISPARO SCHMITT - TRIGER
 solecméxico Circuitos de disparo 1 CIRCUITOS DE DISPARO SCHMITT - TRIGER Cuando la señal de entrada se encuentra contaminada con ruido, la conmutación de un circuito digital o analógico ya no se efectúa
solecméxico Circuitos de disparo 1 CIRCUITOS DE DISPARO SCHMITT - TRIGER Cuando la señal de entrada se encuentra contaminada con ruido, la conmutación de un circuito digital o analógico ya no se efectúa
Sistema de Control de un péndulo Simple
 Sistema de Control de un péndulo Simple Profesor: Gerardo Bonilla Mota Materia: Teoría de control Alumno: Hans Alexander Luna Eisermann Id: 00012332 Sistema de Control de un péndulo Simple Introducción:
Sistema de Control de un péndulo Simple Profesor: Gerardo Bonilla Mota Materia: Teoría de control Alumno: Hans Alexander Luna Eisermann Id: 00012332 Sistema de Control de un péndulo Simple Introducción:
Diagrama y Nomenclatura del sistema de lazo cerrado
 Diagrama y Nomenclatura del sistema de lazo cerrado En la figura 1 se muestra un diagrama de bloques general más detallado, el cual describe de forma adecuada a la mayoría de los sistemas de lazo cerrado.
Diagrama y Nomenclatura del sistema de lazo cerrado En la figura 1 se muestra un diagrama de bloques general más detallado, el cual describe de forma adecuada a la mayoría de los sistemas de lazo cerrado.
TRABAJO PRACTICO No 7. MEDICION de DISTORSION EN AMPLIFICADORES DE AUDIO ANALIZADORES DE ESPECTRO DE AUDIO
 TRABAJO PRACTICO No 7 MEDICION de DISTORSION EN AMPLIFICADORES DE AUDIO ANALIZADORES DE ESPECTRO DE AUDIO INTRODUCCION TEORICA: La distorsión es un efecto por el cual una señal pura (de una única frecuencia)
TRABAJO PRACTICO No 7 MEDICION de DISTORSION EN AMPLIFICADORES DE AUDIO ANALIZADORES DE ESPECTRO DE AUDIO INTRODUCCION TEORICA: La distorsión es un efecto por el cual una señal pura (de una única frecuencia)
Conciencia Tecnológica ISSN: 1405-5597 contec@mail.ita.mx Instituto Tecnológico de Aguascalientes México
 Conciencia Tecnológica ISSN: 1405-5597 contec@mail.ita.mx Instituto Tecnológico de Aguascalientes México Domínguez Sánchez, Gabriel; Esparza González, Mario Salvador; Román Loera, Alejandro Comparación
Conciencia Tecnológica ISSN: 1405-5597 contec@mail.ita.mx Instituto Tecnológico de Aguascalientes México Domínguez Sánchez, Gabriel; Esparza González, Mario Salvador; Román Loera, Alejandro Comparación
COORDENADAS CURVILINEAS
 CAPITULO V CALCULO II COORDENADAS CURVILINEAS Un sistema de coordenadas es un conjunto de valores que permiten definir unívocamente la posición de cualquier punto de un espacio geométrico respecto de un
CAPITULO V CALCULO II COORDENADAS CURVILINEAS Un sistema de coordenadas es un conjunto de valores que permiten definir unívocamente la posición de cualquier punto de un espacio geométrico respecto de un
Capítulo 10. Gráficos y diagramas
 Capítulo 10. Gráficos y diagramas 1. Introducción Los gráficos y diagramas que se acostumbran a ver en libros e informes para visualizar datos estadísticos también se utilizan con propósitos cartográficos,
Capítulo 10. Gráficos y diagramas 1. Introducción Los gráficos y diagramas que se acostumbran a ver en libros e informes para visualizar datos estadísticos también se utilizan con propósitos cartográficos,
El amplificador operacional en bucle abierto (sin realimentar) se comporta como un comparador analógico simple.
 se comporta como un comparador analógico simple.") Comparador simple El amplificador operacional en bucle abierto (sin realimentar) se comporta como un comparador analógico simple. Vo +Vcc Vi-Vref El comparador analógico se denomina también ADC de un bit.
Comparador simple El amplificador operacional en bucle abierto (sin realimentar) se comporta como un comparador analógico simple. Vo +Vcc Vi-Vref El comparador analógico se denomina también ADC de un bit.
13 Análisis dinámico en el
 3 Análisis dinámico en el dominio de la frecuencia El objetivo de este capítulo es tratar de determinar parte de la información de la cadena cerrada a partir de los datos de la estabilidad relativa. Se
3 Análisis dinámico en el dominio de la frecuencia El objetivo de este capítulo es tratar de determinar parte de la información de la cadena cerrada a partir de los datos de la estabilidad relativa. Se
Controladores PID. Virginia Mazzone. Regulador centrífugo de Watt
 Controladores PID Virginia Mazzone Regulador centrífugo de Watt Control Automático 1 http://iaci.unq.edu.ar/caut1 Automatización y Control Industrial Universidad Nacional de Quilmes Marzo 2002 Controladores
Controladores PID Virginia Mazzone Regulador centrífugo de Watt Control Automático 1 http://iaci.unq.edu.ar/caut1 Automatización y Control Industrial Universidad Nacional de Quilmes Marzo 2002 Controladores
DOMINIO Y RANGO página 89. Cuando se grafica una función existen las siguientes posibilidades:
 DOMINIO Y RANGO página 89 3. CONCEPTOS Y DEFINICIONES Cuando se grafica una función eisten las siguientes posibilidades: a) Que la gráfica ocupe todo el plano horizontalmente (sobre el eje de las ). b)
DOMINIO Y RANGO página 89 3. CONCEPTOS Y DEFINICIONES Cuando se grafica una función eisten las siguientes posibilidades: a) Que la gráfica ocupe todo el plano horizontalmente (sobre el eje de las ). b)
3.1 DEFINICIÓN. Figura Nº 1. Vector
 3.1 DEFINICIÓN Un vector (A) una magnitud física caracterizable mediante un módulo y una dirección (u orientación) en el espacio. Todo vector debe tener un origen marcado (M) con un punto y un final marcado
3.1 DEFINICIÓN Un vector (A) una magnitud física caracterizable mediante un módulo y una dirección (u orientación) en el espacio. Todo vector debe tener un origen marcado (M) con un punto y un final marcado
Prácticas de seguridad relativas a la estabilidad de buques pesqueros pequeños
 ESTABILIDAD TRANSVERSAL Cuando un buque se encuentra adrizado (en posición de equilibrio) en aguas tranquilas, el centro de carena (fuerza ascendente) y el centro de gravedad (fuerza descendente) se encuentran
ESTABILIDAD TRANSVERSAL Cuando un buque se encuentra adrizado (en posición de equilibrio) en aguas tranquilas, el centro de carena (fuerza ascendente) y el centro de gravedad (fuerza descendente) se encuentran
Funciones polinomiales de grados cero, uno y dos
 Funciones polinomiales de grados cero, uno y dos A una función p se le llama polinomio si: p x = a n x n + a n 1 x n 1 + + a 2 x 2 + a 1x + a 0 Donde un entero no negativo y los números a 0, a 1, a 2,
Funciones polinomiales de grados cero, uno y dos A una función p se le llama polinomio si: p x = a n x n + a n 1 x n 1 + + a 2 x 2 + a 1x + a 0 Donde un entero no negativo y los números a 0, a 1, a 2,
ANALISIS DE LA RESPUESTA EN FRECUENCIA
 ANALISIS DE LA RESPESA EN FRECENCIA Marco Antonio Pérez Cisneros *, Elke Laubwald + y Mark Readman + * División de Electrónica y Computación, CCEI, niversidad de Guadalajara, México. + Consultores Control
ANALISIS DE LA RESPESA EN FRECENCIA Marco Antonio Pérez Cisneros *, Elke Laubwald + y Mark Readman + * División de Electrónica y Computación, CCEI, niversidad de Guadalajara, México. + Consultores Control
La derivada de y respecto a x es lo que varía y por cada unidad que varía x. Ese valor se designa por dy dx.
 Conceptos de derivada y de diferencial Roberto C. Redondo Melchor, Norberto Redondo Melchor, Félix Redondo Quintela 1 Universidad de Salamanca 18 de agosto de 2012 v1.3: 17 de septiembre de 2012 Aunque
Conceptos de derivada y de diferencial Roberto C. Redondo Melchor, Norberto Redondo Melchor, Félix Redondo Quintela 1 Universidad de Salamanca 18 de agosto de 2012 v1.3: 17 de septiembre de 2012 Aunque
I. RELACIONES Y FUNCIONES 1.1. PRODUCTO CARTESIANO { }
 I. RELACIONES Y FUNCIONES PAREJAS ORDENADAS Una pareja ordenada se compone de dos elementos x y y, escribiéndose ( x, y ) donde x es el primer elemento y y el segundo elemento. Teniéndose que dos parejas
I. RELACIONES Y FUNCIONES PAREJAS ORDENADAS Una pareja ordenada se compone de dos elementos x y y, escribiéndose ( x, y ) donde x es el primer elemento y y el segundo elemento. Teniéndose que dos parejas
1) Como declarar una matriz o un vector.
 Como declarar una matriz o un vector.") MATLAB es un programa que integra matemáticas computacionales y visualización para resolver problemas numéricos basándose en arreglos de matrices y vectores. Esta herramienta posee infinidad de aplicaciones,
MATLAB es un programa que integra matemáticas computacionales y visualización para resolver problemas numéricos basándose en arreglos de matrices y vectores. Esta herramienta posee infinidad de aplicaciones,
CAPITULO 4. Inversores para control de velocidad de motores de
 CAPITULO 4. Inversores para control de velocidad de motores de inducción mediante relación v/f. 4.1 Introducción. La frecuencia de salida de un inversor estático está determinada por la velocidad de conmutación
CAPITULO 4. Inversores para control de velocidad de motores de inducción mediante relación v/f. 4.1 Introducción. La frecuencia de salida de un inversor estático está determinada por la velocidad de conmutación
Control Automático TAREA PROGRAMADA DISEÑO DE UN COMPESADOR DE FILTRO DE MUESCA
 INSTITUTO TECNOLÓGICO DE COSTA RICA ESCUELA DE INGENIERÍA EN ELECTRÓNICA Control Automático TAREA PROGRAMADA DISEÑO DE UN COMPESADOR DE FILTRO DE MUESCA Alumnos: Johan Carvajal Godinez Vladimir Meoño Molleda
INSTITUTO TECNOLÓGICO DE COSTA RICA ESCUELA DE INGENIERÍA EN ELECTRÓNICA Control Automático TAREA PROGRAMADA DISEÑO DE UN COMPESADOR DE FILTRO DE MUESCA Alumnos: Johan Carvajal Godinez Vladimir Meoño Molleda
SISTEMAS DE COORDENADAS SISTEMA COORDENADO UNIDIMENSIONAL
 SISTEMAS DE COORDENADAS En la vida diaria, nos encontramos con el problema de ordenar algunos objetos; de tal manera que es necesario agruparlos, identificarlos, seleccionarlos, estereotiparlos, etc.,
SISTEMAS DE COORDENADAS En la vida diaria, nos encontramos con el problema de ordenar algunos objetos; de tal manera que es necesario agruparlos, identificarlos, seleccionarlos, estereotiparlos, etc.,
Apuntes para el diseño de un amplificador multietapas con TBJs
 Apuntes para el diseño de un amplificador multietapas con TBJs Autor: Ing. Aída A. Olmos Cátedra: Electrónica I - Junio 2005 - Facultad de Ciencias Exactas y Tecnología UNIVERSIDAD NACIONAL DE TUCUMAN
Apuntes para el diseño de un amplificador multietapas con TBJs Autor: Ing. Aída A. Olmos Cátedra: Electrónica I - Junio 2005 - Facultad de Ciencias Exactas y Tecnología UNIVERSIDAD NACIONAL DE TUCUMAN
Diseño de controladores en el dominio frecuencial
 Diseño de controladores en el dominio frecuencial D. Limón, F. Cuesta, F. Salas, C. Vivas T. Álamo y M. Pérez de la Parte Departamento de Ingeniería de Sistemas y Automática Universidad de Sevilla Contents
Diseño de controladores en el dominio frecuencial D. Limón, F. Cuesta, F. Salas, C. Vivas T. Álamo y M. Pérez de la Parte Departamento de Ingeniería de Sistemas y Automática Universidad de Sevilla Contents
Decisión: Indican puntos en que se toman decisiones: sí o no, o se verifica una actividad del flujo grama.
 Diagrama de Flujo La presentación gráfica de un sistema es una forma ampliamente utilizada como herramienta de análisis, ya que permite identificar aspectos relevantes de una manera rápida y simple. El
Diagrama de Flujo La presentación gráfica de un sistema es una forma ampliamente utilizada como herramienta de análisis, ya que permite identificar aspectos relevantes de una manera rápida y simple. El
Juan Antonio González Mota Profesor de Matemáticas del Colegio Juan XIII Zaidín de Granada
 FUNCIONES CONOCIDAS. FUNCIONES LINEALES. Se llaman funciones lineales a aquellas que se representan mediante rectas. Su epresión en forma eplícita es y f ( ) a b. En sentido más estricto, se llaman funciones
FUNCIONES CONOCIDAS. FUNCIONES LINEALES. Se llaman funciones lineales a aquellas que se representan mediante rectas. Su epresión en forma eplícita es y f ( ) a b. En sentido más estricto, se llaman funciones
FUNCIONES CUADRÁTICAS Y RACIONALES
 www.matesronda.net José A. Jiménez Nieto FUNCIONES CUADRÁTICAS Y RACIONALES 1. FUNCIONES CUADRÁTICAS. Representemos, en función de la longitud de la base (), el área (y) de todos los rectángulos de perímetro
www.matesronda.net José A. Jiménez Nieto FUNCIONES CUADRÁTICAS Y RACIONALES 1. FUNCIONES CUADRÁTICAS. Representemos, en función de la longitud de la base (), el área (y) de todos los rectángulos de perímetro
TRABAJO PRACTICO 6 MEDICIONES CON ANALIZADOR DE ESPECTRO DE RF
 TRABAJO PRACTICO 6 MEDICIONES CON ANALIZADOR DE ESPECTRO DE RF INTRODUCCION TEORICA: El análisis de una señal en el modo temporal con ayuda de un osciloscopio permite conocer parte de la información contenida
TRABAJO PRACTICO 6 MEDICIONES CON ANALIZADOR DE ESPECTRO DE RF INTRODUCCION TEORICA: El análisis de una señal en el modo temporal con ayuda de un osciloscopio permite conocer parte de la información contenida
Última modificación: 1 de agosto de 2010. www.coimbraweb.com
 Contenido DOMINIOS DEL TIEMPO Y DE LA FRECUENCIA 1.- Señales analógicas y digitales. 2.- Señales analógicas periódicas. 3.- Representación en los dominios del tiempo y de la frecuencia. 4.- Análisis de
Contenido DOMINIOS DEL TIEMPO Y DE LA FRECUENCIA 1.- Señales analógicas y digitales. 2.- Señales analógicas periódicas. 3.- Representación en los dominios del tiempo y de la frecuencia. 4.- Análisis de
Máster Universitario en Profesorado
 Máster Universitario en Profesorado Complementos para la formación disciplinar en Tecnología y procesos industriales Aspectos básicos de la Tecnología Eléctrica Contenido (II) SEGUNDA PARTE: corriente
Máster Universitario en Profesorado Complementos para la formación disciplinar en Tecnología y procesos industriales Aspectos básicos de la Tecnología Eléctrica Contenido (II) SEGUNDA PARTE: corriente
4.1 EL SISTEMA POLAR 4.2 ECUACIONES EN COORDENADAS POLARES 4.3 GRÁFICAS DE ECUACIONES EN COORDENADAS
 4 4.1 EL SISTEMA POLAR 4. ECUACIONES EN COORDENADAS POLARES 4.3 GRÁFICAS DE ECUACIONES EN COORDENADAS POLARES: RECTAS, CIRCUNFERENCIAS, PARÁBOLAS, ELIPSES, HIPÉRBOLAS, LIMACONS, ROSAS, LEMNISCATAS, ESPIRALES.
4 4.1 EL SISTEMA POLAR 4. ECUACIONES EN COORDENADAS POLARES 4.3 GRÁFICAS DE ECUACIONES EN COORDENADAS POLARES: RECTAS, CIRCUNFERENCIAS, PARÁBOLAS, ELIPSES, HIPÉRBOLAS, LIMACONS, ROSAS, LEMNISCATAS, ESPIRALES.
Funciones, x, y, gráficos
 Funciones, x, y, gráficos Vamos a ver los siguientes temas: funciones, definición, dominio, codominio, imágenes, gráficos, y algo más. Recordemos el concepto de función: Una función es una relación entre
Funciones, x, y, gráficos Vamos a ver los siguientes temas: funciones, definición, dominio, codominio, imágenes, gráficos, y algo más. Recordemos el concepto de función: Una función es una relación entre
Preguntas teóricas de la Clase N 5
 Preguntas teóricas de la Clase N 5 1) Respecto a la cadena de amplificación del sistema vertical (eje Y) de un osciloscopio de rayos catódicos (ORC) Qué entiende por: 1. Impedancia de entrada? Componentes
Preguntas teóricas de la Clase N 5 1) Respecto a la cadena de amplificación del sistema vertical (eje Y) de un osciloscopio de rayos catódicos (ORC) Qué entiende por: 1. Impedancia de entrada? Componentes
Aplicaciones de vectores
 Aplicaciones de vectores Coordenadas del punto medio de un segmento Las coordenadas del punto medio de un segmento son la semisuma de las coordenadas de los extremos. Ejemplo: Hallar las coordenadas del
Aplicaciones de vectores Coordenadas del punto medio de un segmento Las coordenadas del punto medio de un segmento son la semisuma de las coordenadas de los extremos. Ejemplo: Hallar las coordenadas del
Asignatura: CONTROL CLÁSICO Y MODERNO Departamento de Electrónica Facultad de Ingeniería U.Na.M 2015 GUIA DE LABORATORIO Nº2
 GUIA DE LABORATORIO Nº2 Universidad Nacional de Misiones MÉTODOS CLÁSICOS PARA MODELACIÓN DE SISTEMAS 1. Objetivo de la práctica. Modelación a través de la Respuesta en frecuencia Este laboratorio tiene
GUIA DE LABORATORIO Nº2 Universidad Nacional de Misiones MÉTODOS CLÁSICOS PARA MODELACIÓN DE SISTEMAS 1. Objetivo de la práctica. Modelación a través de la Respuesta en frecuencia Este laboratorio tiene
OSCILACIONES ARMÓNICAS
 Tema 5 OSCILACIONES ARMÓNICAS 5.1. Introducción. 5.. Movimiento armónico simple (MAS). 5.3. Cinemática y dinámica del MAS. 5.4. Fuerza y energía en el MAS. 5.5. Péndulo simple. MAS y movimiento circular
Tema 5 OSCILACIONES ARMÓNICAS 5.1. Introducción. 5.. Movimiento armónico simple (MAS). 5.3. Cinemática y dinámica del MAS. 5.4. Fuerza y energía en el MAS. 5.5. Péndulo simple. MAS y movimiento circular
Regulador PID con convertidores de frecuencia DF5, DV5, DF6, DV6. Página 1 de 10 A Regulador PID
 A Página 1 de 10 A Regulador PID INDICE 1. Regulador PID 3 2. Componente proporcional : P 4 3. Componente integral : I 4 4. Componente derivativa : D 4 5. Control PID 4 6. Configuración de parámetros del
A Página 1 de 10 A Regulador PID INDICE 1. Regulador PID 3 2. Componente proporcional : P 4 3. Componente integral : I 4 4. Componente derivativa : D 4 5. Control PID 4 6. Configuración de parámetros del
Química Biológica I TP 1: ESPECTROFOTOMETRIA
 Química Biológica I TP 1: ESPECTROFOTOMETRIA OBJETIVOS: - Reforzar el aprendizaje del uso del espectrofotómetro. - Realizar espectro de absorción de sustancias puras: soluciones de dicromato de potasio.
Química Biológica I TP 1: ESPECTROFOTOMETRIA OBJETIVOS: - Reforzar el aprendizaje del uso del espectrofotómetro. - Realizar espectro de absorción de sustancias puras: soluciones de dicromato de potasio.
Para cada cada valor de la función original lo multiplicas por 3 lo recorres 45 a la derecha y lo subes 5 unidades.
 3.5 Gráficas de las funciones: f(x) = a sen (bx + c) + d f(x) = a cos (bx + c) + d f(x) = a tan (bx + c) + d en donde a, b, c, y d son números reales En la sección 3.4 ya realizamos algunos ejemplos en
3.5 Gráficas de las funciones: f(x) = a sen (bx + c) + d f(x) = a cos (bx + c) + d f(x) = a tan (bx + c) + d en donde a, b, c, y d son números reales En la sección 3.4 ya realizamos algunos ejemplos en
6. VECTORES Y COORDENADAS
 6. VECTORES Y COORDENADAS Página 1 Traslaciones. Vectores Sistema de referencia. Coordenadas. Punto medio de un segmento Ecuaciones de rectas. Paralelismo. Distancias Página 2 1. TRASLACIONES. VECTORES
6. VECTORES Y COORDENADAS Página 1 Traslaciones. Vectores Sistema de referencia. Coordenadas. Punto medio de un segmento Ecuaciones de rectas. Paralelismo. Distancias Página 2 1. TRASLACIONES. VECTORES
ESTATICA: TIPOS DE MAGNITUDES: CARACTERÍSTICAS DE UN VECTOR. Rama de la física que estudia el equilibrio de los cuerpos.
 ESTATICA: Rama de la física que estudia el equilibrio de los cuerpos. TIPOS DE MAGNITUDES: MAGNITUD ESCALAR: Es una cantidad física que se especifica por un número y una unidad. Ejemplos: La temperatura
ESTATICA: Rama de la física que estudia el equilibrio de los cuerpos. TIPOS DE MAGNITUDES: MAGNITUD ESCALAR: Es una cantidad física que se especifica por un número y una unidad. Ejemplos: La temperatura
Unidad V: Integración
 Unidad V: Integración 5.1 Introducción La integración es un concepto fundamental de las matemáticas avanzadas, especialmente en los campos del cálculo y del análisis matemático. Básicamente, una integral
Unidad V: Integración 5.1 Introducción La integración es un concepto fundamental de las matemáticas avanzadas, especialmente en los campos del cálculo y del análisis matemático. Básicamente, una integral
4.2 Acción de Control.
 CAPÍTULO IV. PRUEBAS Y RESULTADOS. 4.1 Introducción. En este capítulo se exponen los resultados obtenidos después de efectuar las pruebas sobre el programa Control de Movimiento Empleando LabVIEW, que
CAPÍTULO IV. PRUEBAS Y RESULTADOS. 4.1 Introducción. En este capítulo se exponen los resultados obtenidos después de efectuar las pruebas sobre el programa Control de Movimiento Empleando LabVIEW, que
Estructura de los sistemas de distribución de radiodifusión sonora y de TV Objetivos
 Estructura de los sistemas de distribución de radiodifusión sonora y de TV Objetivos Conocer los distintos elementos que constituyen una instalación colectiva para la distribución de señales de televisión
Estructura de los sistemas de distribución de radiodifusión sonora y de TV Objetivos Conocer los distintos elementos que constituyen una instalación colectiva para la distribución de señales de televisión
MICROECONOMÍA II. PRÁCTICA TEMA II: Equilibrio parcial
 MICROECONOMÍA II PRÁCTICA TEMA II: Equilibrio parcial EJERCICIO 1 A) En equilibrio, la cantidad demandada coincide con la cantidad ofrecida, así como el precio de oferta y demanda. Por lo tanto, para hallar
MICROECONOMÍA II PRÁCTICA TEMA II: Equilibrio parcial EJERCICIO 1 A) En equilibrio, la cantidad demandada coincide con la cantidad ofrecida, así como el precio de oferta y demanda. Por lo tanto, para hallar
NOTA TÉCNICA UNITRONICS Como Trabaja la Función PID
 NOTA TÉCNICA UNITRONICS Como Trabaja la Función PID Contenido: Familia: Autor: Se explica como trabaja la función PID de los OPLCs Unitronics, mirando este sistema de lazo cerrado desde una vista general.
NOTA TÉCNICA UNITRONICS Como Trabaja la Función PID Contenido: Familia: Autor: Se explica como trabaja la función PID de los OPLCs Unitronics, mirando este sistema de lazo cerrado desde una vista general.
Seminario Universitario Material para estudiantes. Física. Unidad 2. Vectores en el plano. Lic. Fabiana Prodanoff
 Seminario Universitario Material para estudiantes Física Unidad 2. Vectores en el plano Lic. Fabiana Prodanoff CONTENIDOS Vectores en el plano. Operaciones con vectores. Suma y producto por un número escalar.
Seminario Universitario Material para estudiantes Física Unidad 2. Vectores en el plano Lic. Fabiana Prodanoff CONTENIDOS Vectores en el plano. Operaciones con vectores. Suma y producto por un número escalar.
Capítulo II. Movimiento plano. Capítulo II Movimiento plano
 inemática y Dinámica de Máquinas. II. spectos generales del movimiento plano apítulo II Movimiento plano inemática y Dinámica de Máquinas. II. spectos generales del movimiento plano apítulo II Movimiento
inemática y Dinámica de Máquinas. II. spectos generales del movimiento plano apítulo II Movimiento plano inemática y Dinámica de Máquinas. II. spectos generales del movimiento plano apítulo II Movimiento
Se llama dominio de una función f(x) a todos los valores de x para los que f(x) existe. El dominio se denota como Dom(f)
 a todos los valores de x para los que f(x) existe. El dominio se denota como Dom(f)") MATEMÁTICAS EJERCICIOS RESUELTOS DE FUNCIONES FUNCIONES A. Introducción teórica A.1. Definición de función A.. Dominio y recorrido de una función, f() A.. Crecimiento y decrecimiento de una función en
MATEMÁTICAS EJERCICIOS RESUELTOS DE FUNCIONES FUNCIONES A. Introducción teórica A.1. Definición de función A.. Dominio y recorrido de una función, f() A.. Crecimiento y decrecimiento de una función en
Funciones más usuales 1
 Funciones más usuales 1 1. La función constante Funciones más usuales La función constante Consideremos la función más sencilla, por ejemplo. La imagen de cualquier número es siempre 2. Si hacemos una
Funciones más usuales 1 1. La función constante Funciones más usuales La función constante Consideremos la función más sencilla, por ejemplo. La imagen de cualquier número es siempre 2. Si hacemos una
APUNTES DE SISTEMAS DE CONTROL R. P.
 APUNTES DE SISTEMAS DE CONTROL R. P. Ñeco O. Reinoso N. García R. Aracil Elche, octubre, 2003 II Índice general Índice de Figuras Índice de Tablas Prólogo X XIX XXI I Análisis de sistemas continuos de
APUNTES DE SISTEMAS DE CONTROL R. P. Ñeco O. Reinoso N. García R. Aracil Elche, octubre, 2003 II Índice general Índice de Figuras Índice de Tablas Prólogo X XIX XXI I Análisis de sistemas continuos de
MEDICIONES ELECTRICAS II
 Año:... Alumno:... Comisión:... MEDICIONES ELECTRICAS II Trabajo Práctico N 3 Tema: MEDICION DE FASE CONTRASTE DE COFIMETRO. Conceptos Fundamentales El período de una señal senoidal se corresponde con
Año:... Alumno:... Comisión:... MEDICIONES ELECTRICAS II Trabajo Práctico N 3 Tema: MEDICION DE FASE CONTRASTE DE COFIMETRO. Conceptos Fundamentales El período de una señal senoidal se corresponde con
Unidad IV: Cinética química
 63 Unidad IV: Cinética química El objetivo de la cinética química es el estudio de las velocidades de las reacciones químicas y de los factores de los que dependen dichas velocidades. De estos factores,
63 Unidad IV: Cinética química El objetivo de la cinética química es el estudio de las velocidades de las reacciones químicas y de los factores de los que dependen dichas velocidades. De estos factores,
TEMA 1.- SISTEMAS AUTOMÁTICOS Y DE CONTROL.
 TEMA 1.- SISTEMAS AUTOMÁTICOS Y DE CONTROL. INDICE 1.-INTRODUCCIÓN/DEFINICIONES 2.-CONCEPTOS/DIAGRAMA DE BLOQUES 3.-TIPOS DE SISTEMAS DE CONTROL 4.-TRANSFORMADA DE LAPLACE 1.- INTRODUCCIÓN/DEFINICIONES:
TEMA 1.- SISTEMAS AUTOMÁTICOS Y DE CONTROL. INDICE 1.-INTRODUCCIÓN/DEFINICIONES 2.-CONCEPTOS/DIAGRAMA DE BLOQUES 3.-TIPOS DE SISTEMAS DE CONTROL 4.-TRANSFORMADA DE LAPLACE 1.- INTRODUCCIÓN/DEFINICIONES:
Lección 6ª: Oferta y Demanda
 Tomado de aula Fácil. Lección 6 http://www.aulafacil.com/microeconomia/lecciones/lecc-6.htm Lección 6ª: Oferta y Demanda Oferta y Demanda Oferta y demanda son las dos fuerzas que interactúan en los mercado,
Tomado de aula Fácil. Lección 6 http://www.aulafacil.com/microeconomia/lecciones/lecc-6.htm Lección 6ª: Oferta y Demanda Oferta y Demanda Oferta y demanda son las dos fuerzas que interactúan en los mercado,
Pronósticos. Pronósticos y gráficos Diapositiva 1
 Pronósticos Pronósticos Información de base Media móvil Pronóstico lineal - Tendencia Pronóstico no lineal - Crecimiento Suavización exponencial Regresiones mediante líneas de tendencia en gráficos Gráficos:
Pronósticos Pronósticos Información de base Media móvil Pronóstico lineal - Tendencia Pronóstico no lineal - Crecimiento Suavización exponencial Regresiones mediante líneas de tendencia en gráficos Gráficos:
NORMA CHILENA OFICIAL NCh 1619-1979 ACÚSTICA - EVALUACIÓN DEL RUIDO EN RELACIÓN CON LA REACCIÓN DE LA COMUNIDAD
 NORMA CHILENA OFICIAL NCh 1619-1979 ACÚSTICA - EVALUACIÓN DEL RUIDO EN RELACIÓN CON LA REACCIÓN DE LA COMUNIDAD 0 INTRODUCCIÓN La reducción o limitación de ruidos que causan molestias es de una importancia
NORMA CHILENA OFICIAL NCh 1619-1979 ACÚSTICA - EVALUACIÓN DEL RUIDO EN RELACIÓN CON LA REACCIÓN DE LA COMUNIDAD 0 INTRODUCCIÓN La reducción o limitación de ruidos que causan molestias es de una importancia
0.1. Sintonización de Controladores
 0.1. Sintonización de Controladores El diseño de controladores, tal como se mostró en la sección anterior, se realiza en función del conocimiento del proceso, es decir, a partir del modelo del proceso,
0.1. Sintonización de Controladores El diseño de controladores, tal como se mostró en la sección anterior, se realiza en función del conocimiento del proceso, es decir, a partir del modelo del proceso,