RB7/PGD RB6/PGC RB5 RB4 RB3/PGM RB2. RB1 RB0/INT VDD Vss RD7/PSP7 RD6/PSP6 RD5/PSP5 RD4/PSP4 RC7/RX/DT RC6/TX/CK RC5/SD0 RC4/SDI/SDA RD3/PSP3 RD2/PSP2
|
|
|
- Francisco Quiroga Pereyra
- hace 8 años
- Vistas:
Transcripción
1 LOS PIC16F87X Características Generales D. de B L O Q U E S 1

2 D. de B L O Q U E S D. de B L O Q U E S 2
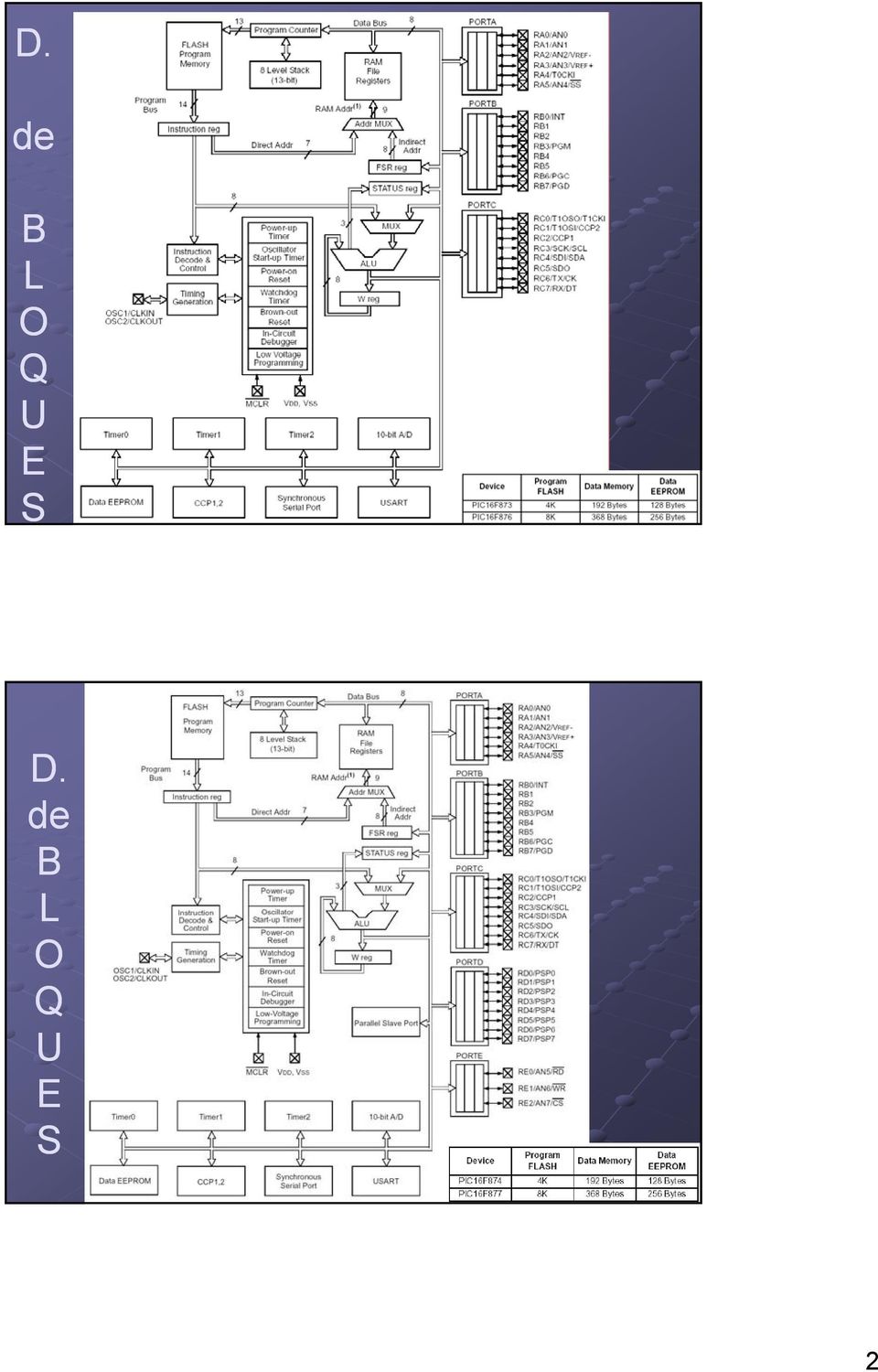
3 Características (1) Procesador de arquitectura RISC avanzada Juego de solo 35 instrucciones con 14 bits de longitud. Todas ellas se ejecutan en un ciclo de instrucción, menos las de salto que tardan dos. Hasta 8K palabras de 14 bits para la Memoria de Programa, tipo FLASH en los modelos 16F876 y 16F877 y 4KB de memoria para los PIC 16F873 y 16F874. Hasta 368 Bytes de memoria de Datos RAM. Hasta 256 Bytes de memoria de Datos EEPROM. Pines de salida compatibles para el PIC 16C73/74/76/77. Hasta 14 fuentes de interrupción internas y externas Pila de 8 niveles. Modos de direccionamiento directo e indirecto. Características (2) Power-on on Reset (POR). Temporizador Power-on on (POP) y Oscilador Temporizador Start-Up (OST). Perro Guardián (WDT). Código de protección programable. Modo SLEEP de bajo consumo. Programación serie en circuito con dos pines. Solo necesita 5V para programarlo en este modo. Voltaje de alimentación comprendido entre 2 y 5,5 5 V. Bajo consumo: < 2 ma valor para 5 V y 4 Mhz 20 μa para 3V y 32 Khz <1 μa en standby 3

4 Periféricos de los PIC16F87X Timer0: Temporizador-Contador de 8 bits con Preescaler de 8 bits. Timer1: Temporizador-Contador de 16 bits con preescaler que puede incrementarse en modo sleep de forma externa por un cristal/clock. Timer2: Temporizador-Contador de 8 bits con preescaler y postescaler. Dos módulos de Captura, Comparación, PWM Convertidor A/D de 10 bits Puerto Serie Síncrono Master (SSP) con SPI (Serial Peripheral Interface) e I 2 C (Master/Slave). Puerto Paralelo Esclavo (PSP) solo en encapsulado con 40 pines. Diferencias entre los modelos de 28 pines y 40 pines Los de 40 pines tienen 5 puertos de E/S: A, B, C, D y E, los de 28 pines solo 3 puertos A, B y C. Los modelos de 40 pines tienen 8 canales de entrada al convertidor A/D, mientras que los de 28 pines solo tienen 5 canales. Solo poseen el Puerto Paralelo Esclavo los PIC16F87X de 40 pines. 4
 con SPI (Serial Peripheral Interface) e I 2 C (Master/Slave).")
5 Descripción de los pines MCLR/Vpp RA0/AN0 RA1/AN1 RA2/AN2/Vref- RA3/AN3/Vref+ RA4/TOCKI RA5/AN4/SS RE0/RD/AN5 RE1/WR/AN6 RE2/CS/AN7 VSS OSC1/CLKIN OSC2/CLKOUT RC0/T1OSO/T1CKI RC1/t1OSO/T!CKI RC2/C RC3/SCK/SCL RD0/PSP0 RD1/PSP PIC16F877/ RB7/PGD RB6/PGC RB5 RB4 RB3/PGM RB2 RB1 RB0/INT Vss RD7/PSP7 RD6/PSP6 RD5/PSP5 RD4/PSP4 RC7/RX/DT RC6/TX/CK RC5/SD0 RC4/SDI/SDA RD3/PSP3 RD2/PSP2 OSC1/CLKIN : Entrada externa de reloj OSC2/CLKOUT : Salida oscilador de cristal. Conexión a cristal o resonador en modo oscilador a cristal. En modo RC, la salida OSC2 es ¼ de la frecuencia de OSC1, que es un ciclo de instrucción. MCLR/Vpp/THV : Entrada Master Clear (reset) o entrada de voltaje de programación o alto voltaje de prueba en modo control. El Reset se activa con nivel bajo. Descripción de los pines MCLR/Vpp RA0/AN0 RA1/AN1 RA2/AN2/Vref- RA3/AN3/Vref+ RA4/TOCKI RA5/AN4/SS RE0/RD/AN5 RE1/WR/AN6 RE2/CS/AN7 VSS OSC1/CLKIN OSC2/CLKOUT RC0/T1OSO/T1CKI RC1/t1OSO/T!CKI RC2/C RC3/SCK/SCL RD0/PSP0 RD1/PSP PIC16F877/ RB7/PGD PORTA es bidireccional de 39 RB6/PGC Entrada/Salida 38 RB5 RA0/AN0: RA0 puede ser entrada 37 RB4 analógica 0 36 RB3/PGM RA1/AN1: RA1 puede ser entrada 35 RB2 analógica 1 34 RB1 33 RA2/AN2/VREF- :RA2 puede ser RB0/INT entrada analógica 2 o voltaje 31 Vss negativo de referencia 30 RD7/PSP7 RA3/AN3/VREF+ :RA3 puede ser RD6/PSP6 entrada analógica o voltaje positivo RD5/PSP5 de referencia 27 RD4/PSP4 RA4/TOCKI :RA4 puede ser entrada RC7/RX/DT de reloj a TMR0.La salida es de tipo RC6/TX/CK Drenador Abierto RC5/SD0 RC4/SDI/SDA RA5/SS/AN4 :RA5 puede ser RD3/PSP3 entrada analógica 4 o la selección del puerto esclavo síncrono. RD2/PSP2 5

6 Descripción de los pines MCLR/Vpp RA0/AN0 RA1/AN1 RA2/AN2/Vref- RA3/AN3/Vref+ RA4/TOCKI RA5/AN4/SS RE0/RD/AN5 RE1/WR/AN6 RE2/CS/AN7 VSS OSC1/CLKIN OSC2/CLKOUT RC0/T1OSO/T1CKI RC1/t1OSO/T!CKI RC2/C RC3/SCK/SCL RD0/PSP0 RD1/PSP PIC16F877/ RB7/PGD PORTB es bidireccional de 39 RB6/PGC Entrada/Salida. Puede programarse 38 RB5 con polarización interna Pull-up up 37 RB4 RB0 puede ser entrada externa de 36 RB3/PGM interrupción 35 RB2 RB3 puede ser entrada de bajo 34 RB1 voltaje de programación 33 RB0/INT RB4 :Interrupciones por cambio de 31 Vss estado en la patilla 30 RD7/PSP7 RB5 :Interrupciones por cambio de RD6/PSP6 estado en la patilla RD5/PSP5 RB6/PGC :Interrupciones por cambio 27 RD4/PSP4 de estado en la patilla o patilla In- 26 RC7/RX/DT Circuit Debugger o reloj serie para 25 RC6/TX/CK programación. 24 RC5/SD0 23 RC4/SDI/SDA RB7/PGD :Interrupciones por cambio 22 RD3/PSP3 de estado en la patilla o patilla In- 21 RD2/PSP2 Circuit Debugger o datos serie para programación. MCLR/Vpp RA0/AN0 RA1/AN1 RA2/AN2/Vref- RA3/AN3/Vref+ RA4/TOCKI RA5/AN4/SS RE0/RD/AN5 RE1/WR/AN6 RE2/CS/AN7 VSS OSC1/CLKIN OSC2/CLKOUT RC0/T1OSO/T1CKI RC1/t1OSO/T!CKI RC2/C RC3/SCK/SCL RD0/PSP0 RD1/PSP1 Descripción de los pines PIC16F877/ RB7/PGD RB6/PGC RB5 p 37 RB4 36 RB3/PGM 35 RB2 34 RB RB0/INT Vss RD7/PSP7 RD6/PSP6 RD5/PSP5 RD4/PSP4 RC7/RX/DT RC6/TX/CK RC5/SD0 RC4/SDI/SDA RD3/PSP3 RD2/PSP2 PORTC es bidireccional de Entrada/Salida RC0/T1OSO/T1CKI :RC0 puede ser salida oscilador Timer1 o entrada de reloj para Timer1. RC1/T1OSI/CCP2 :RC1 puede ser entrada oscilador Timer1 o Captu2/COMP2 Salida/PWM2. RC2/C:RC2 Puede ser Captu1 Entrada/Comp1 salida/pwm1. RC3/SCK/SCL:RC3 puede ser entrada/salida del reloj síncrono para los modos SPI e I2C. RC4/SDI/SDA:RC4 puede ser datos de entrada SPI (modo SPI) o datos I/O (modo I2C). RC5/SDO: RC5 puede ser datos de salida SPI (modo SPI). RC6/TX/CK:RC6 Puede ser transmisión asíncrona USART o reloj Síncrono. RC7/RX/DT RC7 puede ser recepción Asíncrona USART o datos Síncronos. 6

7 Descripción de los pines MCLR/Vpp RA0/AN0 RA1/AN1 RA2/AN2/Vref- RA3/AN3/Vref+ RA4/TOCKI RA5/AN4/SS RE0/RD/AN5 RE1/WR/AN6 RE2/CS/AN7 VSS OSC1/CLKIN OSC2/CLKOUT RC0/T1OSO/T1CKI RC1/t1OSO/T!CKI RC2/C RC3/SCK/SCL RD0/PSP0 RD1/PSP PIC16F877/ RB7/PGD RB6/PGC RB5 RB4 RB3/PGM RB2 RB1 RB0/INT Vss RD7/PSP7 RD6/PSP6 RD5/PSP5 RD4/PSP4 RC7/RX/DT RC6/TX/CK RC5/SD0 RC4/SDI/SDA RD3/PSP3 RD2/PSP2 PORTD es bidireccional de Entrada/Salida o puerto esclavo paralelo Descripción de los pines MCLR/Vpp RA0/AN0 RA1/AN1 RA2/AN2/Vref- RA3/AN3/Vref+ RA4/TOCKI RA5/AN4/SS RE0/RD/AN5 RE1/WR/AN6 RE2/CS/AN7 VSS OSC1/CLKIN OSC2/CLKOUT RC0/T1OSO/T1CKI RC1/t1OSO/T!CKI RC2/C RC3/SCK/SCL RD0/PSP0 RD1/PSP PIC16F877/ RB7/PGD RB6/PGC RB5 RB4 RB3/PGM RB2 RB1 RB0/INT Vss RD7/PSP7 RD6/PSP6 RD5/PSP5 RD4/PSP4 RC7/RX/DT RC6/TX/CK RC5/SD0 RC4/SDI/SDA RD3/PSP3 RD2/PSP2 PORTE es bidireccional de Entrada/Salida RE0/RD/AN5: RE0 puede ser control de lectura del puerto paralelo, o entrada analógica 5 RE1/WR/AN6: RE1 puede ser control de escritura del puerto paralelo o entrada analógica 6 RE2/CS/AN7: RE2 puede ser control de selección del puerto paralelo, entrada analógica 7 7

8 Palabra de configuración (2007) DEBUG _ WRT CPD LVP BODEN PWRTE WDTE FOSC1 FOSC0 bit13 bit0 Los bits de configuración pueden ser programados (puestos a 0) o dejados sin programar (puestos a 1), con objeto de seleccionar varias posibilidades de configuración del microcontrolador. El valor no programado de la palabra de configuración es 3FFFh. Los bits de configuración están mapeados en la posición 2007h de la memoria de programa. No obstante t la posición ió 2007h es una posición de memoria que está fuera del espacio de memoria de programa de usuario, es decir únicamente es accesible durante la programación del microcontrolador y no durante la ejecución de un programa. Palabra de configuración (2007) DEBUG _ WRT CPD LVP BODEN PWRTE WDTE FOSC1 FOSC0 bit13 bit0 :: FLASH Program Memory Code Protection bits(2) 11 = Sin protección de código 10 = 1F00h to 1FFFh Código protegido (PIC16F877, 876) 10 = 0F00h to 0FFFh Código protegido (PIC16F874, 873) 01 = 1000h to 1FFFh Código protegido (PIC16F877, 876) 01 = 0800h to 0FFFh Código protegido (PIC16F874, 873) 00 = 0000h to 1FFFh Código protegido (PIC16F877, 876) 00 = 0000h to 0FFFh Código protegido (PIC16F874, 873) 8

9 Palabra de configuración (2007) DEBUG _ WRT CPD LVP BODEN PWRTE WDTE FOSC1 FOSC0 bit13 bit0 DEBUG: Modo In-Circuit Debugger 1 = Deshabilita modo In-Circuit Debugger,, RB6 y RB7 serán patillas de E/S 0 = Habiliata In Circuit Debugger RB6 y RB7 dedicadas al debuger bit 10. Sin implementar. Se lee como 1 WRT: Habilita escritura en memoria flag de programa. 1 = Sin protección, se puede escribir con el control de EECON 0 = Sin protección, no se puede escribir con el control de EECON Palabra de configuración (2007) DEBUG _ WRT CPD LVP BODEN PWRTE WDTE FOSC1 FOSC0 bit13 bit0 CPD: Protección de datos de la memoria EEPROM 1= Sin protección 0 = Datos de la EEPROM protegidos LVP: Bit de habilitación de programación a bajo voltaje. 1= Patilla RB3/PGM tiene funciones PGM, bajo voltaje de programación habilitado. 0= RB3 es digital I/O, HV habilitado,#mclr se emplea para programación BODEN: Bit de habilitación Brown-out out Reset 1 = BOR habilitado 0 = BOR inhabilitado Nota.- Al habilitar el Brown-out out Reset se habilita automáticamente el Power-up 9

10 Palabra de configuración (2007) DEBUG _ WRT CPD LVP BODEN PWRTE WDTE FOSC1 FOSC0 bit13 bit0 PWRTE: Bit de habilitación del temporizador Power-up. 1 = PWRT deshabilitado 0 = PWRT habilitado WDTE: bit de habilitación de Watchdog 1 = WDT habilitado 0 = WDT deshabilitado Nota.- Al habilitar el Brown-out out Reset se habilita automáticamente el Power-up Palabra de configuración (2007) DEBUG _ WRT CPD LVP BODEN PWRTE WDTE FOSC1 FOSC0 bit13 bit0 FOSC1:FOSC0 : bits de selección de oscilador 11 = Oscilador RC 10 = Oscilador HS 01 = Oscilador XT 00 = Oscilador LP 10

11 Configuración del oscilador Los PIC16F87X pueden funcionar con 4 modos distintos de oscilador. El usuario puede programar los dos bits de configuración para seleccionar uno de estos 4 modos: LP Low Power Crystal XT Crystal/Resonator HS High Speed Crystal/Resonator RC Resistor/Capacitor Otros PIC de la familia PIC16 tienen un numero mayor de modos para el oscilador y, por tanto, un número mayor de bits para seleccionar. Estos otros modos son: EXTRC External Resistor/Capacitor EXTRC External Resistor/Capacitor with CLKOUT INTRC Internal 4 MHz Resistor/Capacitor INTRC Internal 4 MHz Resistor/Capacitor with CLKOUT Configuración del oscilador En los modos XT, LP o HS un cristal de cuarzo o un resonador cerámico se conecta a los pines OSC1 y OSC2 tal y como se indica en la figura adjunta. Normalmente no se pone la resistencia RS, se sustituye por un cortocircuito Los valores de los condensadores C1 y C2 dependen del cristal o resonador escogido. En las tablas adjuntas se pueden ver valores típicos para estos condensadores 11

12 Configuración del oscilador En los modos XT, LP o HS también se puede utilizar un oscilador de cuarzo ó módulo de cristal que ya proporciona la señal de reloj directamente sin hacer uso de la circuitería interna del microcontrolador para generar el oscilador Configuración del Oscilador En aplicaciones donde la precisión de tiempo no debe ser muy elevada, la opción RC es una solución válida de bajo coste. En este caso se conectan externamente una resistencia y un condensador como se indica en la figura adjunta. La frecuencia de oscilación depende de la tensión de alimentación, del valor de la resistencia REXT, del valor del condensador CEXT y de la temperatura de funcionamiento. Por tanto, de una tarjeta con un micro a otra con el mismo micro y valores de REXT y CEXT, la frecuencia de oscilación podrá variar acorde a la tolerancia en los valores de REXT y CEXT. La frecuencia del oscilador dividida por 4 se obtiene como salida en el pin OSC2. 12

13 Configuración del Oscilador En las características eléctricas de cada microcontrolador se dan gráficas que te permiten escoger el valor de la resistencia para a un valor del condensador, temperatura y tensión de alimentación determinadas. RESET del µc y temporizaciones en el arranque Los PIC16F87X tienen 6 posibles fuentes de RESET del MCU: Power-on Reset (POR) MCLR Reset durante funcionamiento normal MCLR Reset durante SLEEP WDT Reset (durante funcionamiento normal) WDT Wake-up (durante SLEEP) Brown-out Reset (BOR) La mayoría de los registros del mapa de memoria de datos que no se ven afectados por ningún tipo de RESET, su estado ó valor puede ser desconocido si se produce un POR o permanecer inalterado respecto a su último valor con otro tipo de RESET. No obstante, hay muchos otros registros que son reseteados a un valor determinado si se produce un POR, un MCLR Reset ó WDT Reset durante funcionamiento normal, un MCLR Reset durante SLEEP ó un BOR. Estos registros no suelen ver afectado su valor si se produce un WDT Wake-Up, que realmente es una vuelta al funcionamiento normal desde el punto de programa donde se hubiera ejecutado el SLEEP. Los bits TO y PD del registro STATUS y los bits POR y BOR del registro PCON dan información de cual fue el motivo del último RESET, que puede utilizarse en el programa. #POR #BOR #T0 #PD 0 X 1 1 Power-onon Reser (Encendido) 0 X 0 X Ilegal,#TO se pone a 1 por #POR 0 X X 0 Ilegal, #PD se pone a 1 por #POR Brown-out out Reset (Error de ) WDT Reset WDT Wake-up (Despertar WDT) 1 1 U U Operación normal de realizar un Reset Operación de Reset durante el SLEEP (Despertar por WDT) 13
 WDT Wake-up (durante SLEEP) Brown-out Reset (BOR) La mayoría de los registros del mapa de memoria de datos que no se ven afectados por ningún tipo de RESET, su")
14 BROWN-OUT RESET La circuitería de Brown-out disponible en el propio chip detecta si la tensión de alimentación cae por debajo de un determinado valor (B) provocando un RESET del dispositivo. Esto asegura que el dispositivo no continúe con la ejecución del programa si la alimentación se sale del rango de funcionamiento válido. Brown-out RESET se utiliza principalmente en aplicaciones i con alimentación ió desde d red o desde d batería donde se conmuten grandes cargas y puedan originar que la tensión de alimentación caiga temporalmente por debajo de la tensión mínima de alimentación permitida. BROWN-OUT RESET Como se ha visto en la palabra de configuración existe el bit BODEN que permite habilitar (1) o deshabilitar (0) esta función. Si el BROWN-OUT esta habilitado, el POWER-UP Timer también debe estarlo. El parámetro D005 (VBOR) (tipicamente 4V) es la tensión mínima permitida en la alimentación. Si este valor se supera durante un tiempo mayor al fijado por el parámetro 35 (TBOR = 100µs) se producirá un RESET del microcontrolador. El RESET no está garantizado si la tensión de alimentación cae por debajo del valor D005 durante un tiempo menor del fijado por el parámetro 35. El chip permanecerá en RESET hasta que la tensión de alimentación supere B. En ese instante se inicia la temporización de POWER-UP (72 mseg) durante la que el chip se mantendrá reseteado. Si durante esta temporización se vuelve a producir una caída de la tensión de alimentación por debajo de B, el chip volverá al estado de RESET y la temporización de Power-up volverá a arrancar desde cero cuando la tensión de alimentación vuelva a recuperarse por encima de B 14

15 BROWN-OUT RESET 15

LOS PIC16F87X. Características Generales. IES Juan de la Cierva (Madrid). Desarrollo de Productos Electrónicos
. Desarrollo de Productos Electrónicos") LOS PIC6F87X Características Generales D. de B L O Q U E S Los Pic6F87X Fernando Remiro D. de B L O Q U E S Características () Procesador de arquitectura RISC avanzada Juego de solo 35 instrucciones con
LOS PIC6F87X Características Generales D. de B L O Q U E S Los Pic6F87X Fernando Remiro D. de B L O Q U E S Características () Procesador de arquitectura RISC avanzada Juego de solo 35 instrucciones con
MICROCONTROLADORES PIC EEPROM. Memoria de programa Características
 EEPROM. Memoria de programa Características Algunos dispositivos pueden leer la memoria de programa. Leer checksums, calibración de datos, tablas. 14-bits de datos comparados con los 8 de retlw 0xnn Accesibles
EEPROM. Memoria de programa Características Algunos dispositivos pueden leer la memoria de programa. Leer checksums, calibración de datos, tablas. 14-bits de datos comparados con los 8 de retlw 0xnn Accesibles
Cartilla para Microcontrolador PIC16F877. 28/40 Pin 8-Bit CMOS FLASH.
 Cartilla para Microcontrolador PIC16F877 28/40 Pin 8-Bit CMOS FLASH. Características principales CPU RISC de alta performance Set de35 instrucciones Todas las instrucciones son de un ciclo salvo aquellas
Cartilla para Microcontrolador PIC16F877 28/40 Pin 8-Bit CMOS FLASH. Características principales CPU RISC de alta performance Set de35 instrucciones Todas las instrucciones son de un ciclo salvo aquellas
El Microcontrolador PIC16F877. Resumen de hoja de datos
 El Microcontrolador PIC16F877 Resumen de hoja de datos 2 El PIC16F877 es un microcontrolador con memoria de programa tipo FLASH, lo que representa gran facilidad en el desarrollo de prototipos y en su
El Microcontrolador PIC16F877 Resumen de hoja de datos 2 El PIC16F877 es un microcontrolador con memoria de programa tipo FLASH, lo que representa gran facilidad en el desarrollo de prototipos y en su
Pines de entrada/salida (I/O) de propósito general. Mediante ellos, el micro PIC puede monitorizar y controlar otros dispositivos.
 de propósito general. Mediante ellos, el micro PIC puede monitorizar y controlar otros dispositivos.") 1 Pines de entrada/salida (I/O) de propósito general Mediante ellos, el micro PIC puede monitorizar y controlar otros dispositivos. Para añadir flexibilidad al micro, muchos de sus pines de entrada/salida
1 Pines de entrada/salida (I/O) de propósito general Mediante ellos, el micro PIC puede monitorizar y controlar otros dispositivos. Para añadir flexibilidad al micro, muchos de sus pines de entrada/salida
SISTEMAS ELECTRÓNICOS AVANZADOS. ING. TÉC. INDUSTRIAL ELECTRÓNICO
 INTERRUPCIONES Interrumpen la ejecución de un programa y pasan a la rutina de servicio del evento que provoca la interrupción. El vector de interrupción se encuentra en la dirección 04H de la memoria de
INTERRUPCIONES Interrumpen la ejecución de un programa y pasan a la rutina de servicio del evento que provoca la interrupción. El vector de interrupción se encuentra en la dirección 04H de la memoria de
INSTITUTO TECNOLÓGICO SUPERIOR DE PÁNUCO APUNTES DE LA MATERIA DE: MICROPROCESADORES Y MICROCONTROLADORES I
 INSTITUTO TECNOLÓGICO SUPERIOR DE PÁNUCO APUNTES DE LA MATERIA DE: MICROPROCESADORES Y MICROCONTROLADORES I DEPARTAMENTO DE INGENIERÍA ELECTRÓNICA ING. FORTINO VÁZQUEZ ELORZA Documento traducido de la
INSTITUTO TECNOLÓGICO SUPERIOR DE PÁNUCO APUNTES DE LA MATERIA DE: MICROPROCESADORES Y MICROCONTROLADORES I DEPARTAMENTO DE INGENIERÍA ELECTRÓNICA ING. FORTINO VÁZQUEZ ELORZA Documento traducido de la
Características Técnicas del PIC 16F84
 Características Técnicas del PIC 16F84 Repertorio de 35 Instrucciones. Todas las instrucciones se ejecutan en un solo ciclo excepto las de salto que necesitan dos. Versiones de 4 MHz (PIC16F84-04) y 10
Características Técnicas del PIC 16F84 Repertorio de 35 Instrucciones. Todas las instrucciones se ejecutan en un solo ciclo excepto las de salto que necesitan dos. Versiones de 4 MHz (PIC16F84-04) y 10
SISTEMA ALARMA DOMESTICO MEMORIA
 SISTEMA ALARMA DOMESTICO MEMORIA Benito Zaragozí Zaragozí Carlos García Gómez Alejandro Gil Martínez Bezaza@epsa.upv.es Cargargo@epsa.upv.es Algimar@epsa.upv.es INTRODUCCIÓN Hoy en día si desea proteger
SISTEMA ALARMA DOMESTICO MEMORIA Benito Zaragozí Zaragozí Carlos García Gómez Alejandro Gil Martínez Bezaza@epsa.upv.es Cargargo@epsa.upv.es Algimar@epsa.upv.es INTRODUCCIÓN Hoy en día si desea proteger
Programación y diseño de dispositivos mediante microcontroladores PIC
 Metodología de Programación, Programación en C, Aplicaciones electrónicas 1 / 7 Programación y diseño de dispositivos mediante microcontroladores PIC Hemos elegido el microcontrolador PIC16F84 por las
Metodología de Programación, Programación en C, Aplicaciones electrónicas 1 / 7 Programación y diseño de dispositivos mediante microcontroladores PIC Hemos elegido el microcontrolador PIC16F84 por las
Usando los Codificadores Cuadráticos
 Usando los Codificadores Cuadráticos Autor: Ing. Carlos Narváez Universidad de Oriente email: cnarvaez@udo.edu.ve Introducción El presente trabajo es una introducción a los denominados codificadores cuadráticos,
Usando los Codificadores Cuadráticos Autor: Ing. Carlos Narváez Universidad de Oriente email: cnarvaez@udo.edu.ve Introducción El presente trabajo es una introducción a los denominados codificadores cuadráticos,
Microcontroladores de Atmel
 Microcontroladores de Atmel Familia AVR Ing. Marone José Introducción: Historia Los AVR son una familia de microcontroladores RISC de Atmel. La arquitectura de los AVR fue concebida por dos estudiantes
Microcontroladores de Atmel Familia AVR Ing. Marone José Introducción: Historia Los AVR son una familia de microcontroladores RISC de Atmel. La arquitectura de los AVR fue concebida por dos estudiantes
GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA PICCITO 16F88 INDICE
 1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA PICCITO 16F88 INDICE 1. Información general sobre el programa Bootloader para el sistema PICCITO 16F88. Auto-programador (Self programming) a través del
1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA PICCITO 16F88 INDICE 1. Información general sobre el programa Bootloader para el sistema PICCITO 16F88. Auto-programador (Self programming) a través del
GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA EB88 BOOTLOADER: TINY INDICE
 1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA EB88 BOOTLOADER: TINY INDICE 1. Información general sobre el programa Bootloader para el sistema EB88. Auto-programador (Self programming) a través del puerto
1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA EB88 BOOTLOADER: TINY INDICE 1. Información general sobre el programa Bootloader para el sistema EB88. Auto-programador (Self programming) a través del puerto
Microcontroladores PIC de Microchip: generalidades
 Microcontroladores PIC de Microchip: generalidades PIC significa Peripheral Interface Controller Los fabrica ARIZONA MICROCHIP TECHNOLOGY. Fábrica principal: Chandler (Arizona). Otras en Tender (Arizona),
Microcontroladores PIC de Microchip: generalidades PIC significa Peripheral Interface Controller Los fabrica ARIZONA MICROCHIP TECHNOLOGY. Fábrica principal: Chandler (Arizona). Otras en Tender (Arizona),
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Características del datalogger autónomo EJERCICIO: El datalogger o registrador debe sensar la temperatura ambiente cada 1s y guardarla junto a la fecha y hora de adquisición en un archivo.txt alojado en
Características del datalogger autónomo EJERCICIO: El datalogger o registrador debe sensar la temperatura ambiente cada 1s y guardarla junto a la fecha y hora de adquisición en un archivo.txt alojado en
Temporizadores y contadores en tiempo real: El módulo Timer0 y el prescaler del PIC
 Temporizadores y contadores en tiempo real: El módulo Timer0 y el aler del PIC 1. Introducción...1 2. Estructura del Timer0...1 3. Funcionamiento del Timer0...2 3.1. Entrada de reloj del modulo Timer0...
Temporizadores y contadores en tiempo real: El módulo Timer0 y el aler del PIC 1. Introducción...1 2. Estructura del Timer0...1 3. Funcionamiento del Timer0...2 3.1. Entrada de reloj del modulo Timer0...
Elección de un microcontrolador
 Elección de un microcontrolador Decisión multivariable. No hay un óptimo evidente Factores: Herramientas de desarrollo Base de conocimientos Precio y disponibilidad Familia versátil y en desarrollo Cantidad
Elección de un microcontrolador Decisión multivariable. No hay un óptimo evidente Factores: Herramientas de desarrollo Base de conocimientos Precio y disponibilidad Familia versátil y en desarrollo Cantidad
xl PIC16F877
 4.6.8.- PIC16F877 xl 4.6.9.- PIC 16F84 xli xlii 4.7.- ANEXO3 4.7.1.- El Microcontrolador PIC16F84: Este microcontrolador es un Circuito Integrado Programable o PIC por sus siglas en Inglés: (Programmable
4.6.8.- PIC16F877 xl 4.6.9.- PIC 16F84 xli xlii 4.7.- ANEXO3 4.7.1.- El Microcontrolador PIC16F84: Este microcontrolador es un Circuito Integrado Programable o PIC por sus siglas en Inglés: (Programmable
GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA EVOLUPIC Bootloader 16F88 BOOTLOADER: AN1310 DE MICROCHIP INDICE
 1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA EVOLUPIC Bootloader 16F88 BOOTLOADER: AN1310 DE MICROCHIP INDICE 1. Información general sobre el programa Bootloader para el sistema EVOLUPIC-16F88. Auto-programador
1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA EVOLUPIC Bootloader 16F88 BOOTLOADER: AN1310 DE MICROCHIP INDICE 1. Información general sobre el programa Bootloader para el sistema EVOLUPIC-16F88. Auto-programador
Microchip Tips & Tricks...
 ARTICULO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de EduDevices. Soluciones y Diseños de Fuentes Inteligentes. Introducción: Microchip continúa presentando uana serie de productos
ARTICULO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de EduDevices. Soluciones y Diseños de Fuentes Inteligentes. Introducción: Microchip continúa presentando uana serie de productos
Microcontrolador PIC16F84: Arquitectura
 Microcontrolador PIC16F84: Arquitectura La arquitectura del PIC es tipo Harvard: Mem. de Programa (instrucciones) (tipo FLASH) Control DIR DATOS µp (tipo RISC, pipeline de 2 etapas) Control DIR DATOS 14
Microcontrolador PIC16F84: Arquitectura La arquitectura del PIC es tipo Harvard: Mem. de Programa (instrucciones) (tipo FLASH) Control DIR DATOS µp (tipo RISC, pipeline de 2 etapas) Control DIR DATOS 14
Curso sobre Microcontroladores Familia HC9S08 de Freescale
 Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
TEMA 20.0. EL BUS I 2 C (Inter Integrated Circuit Bus) I2C EN C
 I2C EN C") TEMA 20.0 EL BUS I 2 C (Inter Integrated Circuit Bus) I2C EN C La comunicación n serie en los PIC 16F87X Los microcontroladores PIC de la familia 16F78x, tienen la posibilidad de comunicación serie, las
TEMA 20.0 EL BUS I 2 C (Inter Integrated Circuit Bus) I2C EN C La comunicación n serie en los PIC 16F87X Los microcontroladores PIC de la familia 16F78x, tienen la posibilidad de comunicación serie, las
BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC MEMORIAS EEPROM SERIE
 BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC MEMORIAS EEPROM SERIE Fernando Nuño García 1 Ventajas del BUS I2C Definido inicialmente a mediados de los 80 para trabajar a 100kbit/s y en 1995
BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC MEMORIAS EEPROM SERIE Fernando Nuño García 1 Ventajas del BUS I2C Definido inicialmente a mediados de los 80 para trabajar a 100kbit/s y en 1995
Modos de ahorro de energía a en los chips CMOS
 Modos de ahorro de energía a en los chips CMOS MODOS DE OPERACIÓN N DE AHORRO DE ENERGÍA Para aplicaciones donde el consumo de potencia es crítico las versiones CMOS proporcionan modos de operación de
Modos de ahorro de energía a en los chips CMOS MODOS DE OPERACIÓN N DE AHORRO DE ENERGÍA Para aplicaciones donde el consumo de potencia es crítico las versiones CMOS proporcionan modos de operación de
BUS I2C. IES Los Viveros Sevilla Dpto. Electrónica. 1
 BUS I2C Se trata de un protocolo serie desarrollado por Philips Semiconductors usado por muchos integrados para comunicarse entre ellos, para su funcionamiento requiere sólo dos líneas, una de reloj (SCL)
BUS I2C Se trata de un protocolo serie desarrollado por Philips Semiconductors usado por muchos integrados para comunicarse entre ellos, para su funcionamiento requiere sólo dos líneas, una de reloj (SCL)
PUERTOS DE ENTRADA Y SALIDA
 PUERTOS DE ENTRADA Y SALIDA El microcontrolador Z8 PLUS dedica 14 líneas para puertos de entrada y salida. Estas líneas están agrupadas en dos puertos conocidos como el Puerto A y el Puerto B. El puerto
PUERTOS DE ENTRADA Y SALIDA El microcontrolador Z8 PLUS dedica 14 líneas para puertos de entrada y salida. Estas líneas están agrupadas en dos puertos conocidos como el Puerto A y el Puerto B. El puerto
INGENIERIA EN MICROCONTROLADORES. Protocolo RS-485. Introducción
 INGENIERIA EN MICROCONTROLADORES Protocolo RS-485 Introducción P R O T O C O L O R S - 4 8 5 www.i-micro.com Ingeniería en Microcontroladores Teléfono 044 55 11 29 55 05 E-mail: cursos@i-micro.com elp@i-micro.com
INGENIERIA EN MICROCONTROLADORES Protocolo RS-485 Introducción P R O T O C O L O R S - 4 8 5 www.i-micro.com Ingeniería en Microcontroladores Teléfono 044 55 11 29 55 05 E-mail: cursos@i-micro.com elp@i-micro.com
COMUNICACIÓN I2C (INTER-INTEGRATED CIRCUIT)
") COMUNICACIÓN I2C (INTER-INTEGRATED CIRCUIT) Centro CFP/ES COMUNICACIÓN I2C 1 VENTAJAS DE LA COMUNICACIÓN I2C COMPARATIVA ESTANDAR DE TRANSMISIÓN 2 DISPOSITIVOS I2C DISPOSITIVOS I2C MAX518 3 DISPOSITIVOS
COMUNICACIÓN I2C (INTER-INTEGRATED CIRCUIT) Centro CFP/ES COMUNICACIÓN I2C 1 VENTAJAS DE LA COMUNICACIÓN I2C COMPARATIVA ESTANDAR DE TRANSMISIÓN 2 DISPOSITIVOS I2C DISPOSITIVOS I2C MAX518 3 DISPOSITIVOS
INTERIOR DEL PROCESADOR
 1 INTERIOR DEL PROCESADOR En esta sección se pretende: Conocer la arquitectura y funcionamiento de los microcontroladores de la familia PIC16X8X La organización de su memoria, y Sus registros de funciones
1 INTERIOR DEL PROCESADOR En esta sección se pretende: Conocer la arquitectura y funcionamiento de los microcontroladores de la familia PIC16X8X La organización de su memoria, y Sus registros de funciones
PIC MICRO ESTUDIO Timer Monoestable/Biestable ajustable hasta 99H 59M 59S Timer 2T Clave: 722-1 www.electronicaestudio.com
 PIC MICRO ESTUDIO Timer Monoestable/Biestable ajustable hasta 99H 59M 59S Timer 2T Clave: 722-1 www.electronicaestudio.com Guía de Operación P I C M I C R O E S T D U D I O Timer Monoestable/Biestable
PIC MICRO ESTUDIO Timer Monoestable/Biestable ajustable hasta 99H 59M 59S Timer 2T Clave: 722-1 www.electronicaestudio.com Guía de Operación P I C M I C R O E S T D U D I O Timer Monoestable/Biestable
METODOLOGÍA DESARROLLADA PARA PRÁCTICAS DE PROGRAMACIÓN DE MICROCONTROLADORES PIC
 METODOLOGÍA DESARROLLADA PARA PRÁCTICAS DE PROGRAMACIÓN DE MICROCONTROLADORES PIC M.A. VICENTE, C. FERNÁNDEZ., y M.N. ROBLES Dpto. de Ingeniería de Sistemas Industriales. Universidad Miguel Hernández.
METODOLOGÍA DESARROLLADA PARA PRÁCTICAS DE PROGRAMACIÓN DE MICROCONTROLADORES PIC M.A. VICENTE, C. FERNÁNDEZ., y M.N. ROBLES Dpto. de Ingeniería de Sistemas Industriales. Universidad Miguel Hernández.
PIC16C5X (GAMA BAJA) Solo en dispositivos de 28 pins. Encapsulado y patillaje:
 Solo en dispositivos de 28 pins. Encapsulado y patillaje:") PIC6C5X (GAMA BAJA) Oscilador RESET SLEEP WatchDog Timer (WDT) Protección de código e IDs Periféricos: Timer/Contador de 8bits (T) con prescaler compartido para WDT o TMR Hasta 3 puertos I/O (RA,RB,RC)
PIC6C5X (GAMA BAJA) Oscilador RESET SLEEP WatchDog Timer (WDT) Protección de código e IDs Periféricos: Timer/Contador de 8bits (T) con prescaler compartido para WDT o TMR Hasta 3 puertos I/O (RA,RB,RC)
PIC16CXXX (GAMA MEDIA) Oscilador RESET SLEEP WatchDog Timer (WDT) Protección de código e IDs Interrupciones Programación ICSP (In Circuit Serial
 Oscilador RESET SLEEP WatchDog Timer (WDT) Protección de código e IDs Interrupciones Programación ICSP (In Circuit Serial") PIC6CXXX (GAMA MEDIA) Oscilador RESET SLEEP WatchDog Timer (WDT) Protección de código e IDs Interrupciones Programación ICSP (In Circuit Serial Programming) Periféricos: Timer/Contador de 8bits (T) con
PIC6CXXX (GAMA MEDIA) Oscilador RESET SLEEP WatchDog Timer (WDT) Protección de código e IDs Interrupciones Programación ICSP (In Circuit Serial Programming) Periféricos: Timer/Contador de 8bits (T) con
Tema 6: Microcontroladores
 Tema 6: Microcontroladores Carlos Garre del Olmo 1 Microcontroladores Contenidos Introducción a los microcontroladores. Principales familias y sus características. La familia PIC16. Programación de microcontroladores.
Tema 6: Microcontroladores Carlos Garre del Olmo 1 Microcontroladores Contenidos Introducción a los microcontroladores. Principales familias y sus características. La familia PIC16. Programación de microcontroladores.
Palabra de Configuración Palabra de Configuración del PIC16F1787
 del PIC16F1787 La palabra de Configuración permite: Configurar el Oscilador Inicio del RESET Habilitar el WDT Protección de la Memoria Configurar la Programación Depuración del programa del PIC16F1787
del PIC16F1787 La palabra de Configuración permite: Configurar el Oscilador Inicio del RESET Habilitar el WDT Protección de la Memoria Configurar la Programación Depuración del programa del PIC16F1787
El microcontrolador PIC de Microchip
 El microcontrolador PIC de Microchip Taller de Microcontroladores año 2012 Optativa de grado y Curso de Posgrado Organización de los PIC Características generales de los PIC Fabricados con tecnología CMOS.
El microcontrolador PIC de Microchip Taller de Microcontroladores año 2012 Optativa de grado y Curso de Posgrado Organización de los PIC Características generales de los PIC Fabricados con tecnología CMOS.
Tema 14. Interrupciones. Las. C. F. G.S. D.P.E. Módulo de Proyectos 1
 Tema 14 Las Interrupciones C. F. G.S. D.P.E. Módulo de Proyectos 1 Los PIC de la familia 16F8X poseen 4 fuentes de interrupción: Interrupción externa a través del pin RB0/INT Interrupción por overflow
Tema 14 Las Interrupciones C. F. G.S. D.P.E. Módulo de Proyectos 1 Los PIC de la familia 16F8X poseen 4 fuentes de interrupción: Interrupción externa a través del pin RB0/INT Interrupción por overflow
Winide y Kit EVALQTY CDM 2011
 Winide y Kit EVALQTY CDM 2011 Seteo de jumpers jumpers JUMPER : JP1 Selección de la Tensión de Alimentación al MCU. JP1 en posición 1-2 VDD = 5Vdc JP1 en posición 2-3 VDD = 3Vdc (MCU alimentado con 3Vdc)
Winide y Kit EVALQTY CDM 2011 Seteo de jumpers jumpers JUMPER : JP1 Selección de la Tensión de Alimentación al MCU. JP1 en posición 1-2 VDD = 5Vdc JP1 en posición 2-3 VDD = 3Vdc (MCU alimentado con 3Vdc)
Memoria 24LC256 I. I NTRODUCCIÓN
 1 Memoria 24LC256 I. I NTRODUCCIÓN I2C es un bus de comunicación serial sincrónica desarrollado por Phillips Semiconductors a principios de los años 80 s, con la principal intención de interconectar una
1 Memoria 24LC256 I. I NTRODUCCIÓN I2C es un bus de comunicación serial sincrónica desarrollado por Phillips Semiconductors a principios de los años 80 s, con la principal intención de interconectar una
podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que el
 CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
PIC 18F45XX CARACTERÍSTICAS GENERALES
 PIC 18F45XX CARACTERÍSTICAS GENERALES 1. Características generales CPU con arquitectura Harvard (77 instrucciones) Todas las instrucciones constan de 1 sola palabra de 16 bits (2 bytes) excepto las de
PIC 18F45XX CARACTERÍSTICAS GENERALES 1. Características generales CPU con arquitectura Harvard (77 instrucciones) Todas las instrucciones constan de 1 sola palabra de 16 bits (2 bytes) excepto las de
INTRODUCCIÓN A LA INSTRUMENTACIÓN BÁSICA. Nociones básicas sobre el manejo de LOS EQUIPOS DEL LABORATORIO
 INTRODUCCIÓN A LA INSTRUMENTACIÓN BÁSICA Esta documentación tiene como objetivo facilitar el primer contacto del alumno con la instrumentación básica de un. Como material de apoyo para el manejo de la
INTRODUCCIÓN A LA INSTRUMENTACIÓN BÁSICA Esta documentación tiene como objetivo facilitar el primer contacto del alumno con la instrumentación básica de un. Como material de apoyo para el manejo de la
- El programador no funciona con los siguientes sistemas operativos: Windows NT, ni la familia de Windows 2000
 Precauciones previas: - Lo primero, te recomiendo que imprimas este documento. - El programador no funciona con los siguientes sistemas operativos: Windows NT, ni la familia de Windows 2000 - La velocidad
Precauciones previas: - Lo primero, te recomiendo que imprimas este documento. - El programador no funciona con los siguientes sistemas operativos: Windows NT, ni la familia de Windows 2000 - La velocidad
Microchip Tips & Tricks...
 COMENTARIO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de Electrónica Elemon S.A. N. de R: La presente serie de artículos técnicos tiene por objetivo proponer consejos y trucos
COMENTARIO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de Electrónica Elemon S.A. N. de R: La presente serie de artículos técnicos tiene por objetivo proponer consejos y trucos
Especificaciones técnicas. Power, Inputs and Outputs. Operating Voltage Input Voltage (recommended) Input Voltage (limits) Analog Input Pins
 Input Voltage (limits) Analog Input Pins") Especificaciones técnicas Microcontroller Operating Voltage Input Voltage (recommended) Input Voltage (limits) Digital I/O Pins Analog Input Pins DC Current for I/O Pin DC Current for 3.3V Pin Flash Memory
Especificaciones técnicas Microcontroller Operating Voltage Input Voltage (recommended) Input Voltage (limits) Digital I/O Pins Analog Input Pins DC Current for I/O Pin DC Current for 3.3V Pin Flash Memory
MICROCONTROLADOR PIC DE MICROCHIP
 MICROCONTROLADOR PIC DE MICROCHIP PIC16F877-28-PIN 8-BIT CMOS FLASH MICROCONTROLLER PIC16F877: ESTRUCTURA INTERNA Bus de Datos Bus de Datos (programa) Registro de trabajo (acumulador) Conversor A/D Contador/Temporizador
MICROCONTROLADOR PIC DE MICROCHIP PIC16F877-28-PIN 8-BIT CMOS FLASH MICROCONTROLLER PIC16F877: ESTRUCTURA INTERNA Bus de Datos Bus de Datos (programa) Registro de trabajo (acumulador) Conversor A/D Contador/Temporizador
SENSOR DE MOVIMIENTO
 MANUAL DE PRODUCTO SENSOR DE MOVIMIENTO ZN1IO-DETEC Edición 2 Versión 3.1 Índice 1. Introducción... 3 2. Instalación... 4 2.1. Instalación del Sensor de Movimiento... 4 2.2. Descripción de elementos...
MANUAL DE PRODUCTO SENSOR DE MOVIMIENTO ZN1IO-DETEC Edición 2 Versión 3.1 Índice 1. Introducción... 3 2. Instalación... 4 2.1. Instalación del Sensor de Movimiento... 4 2.2. Descripción de elementos...
Autómata Siemens S7-200
 Autómata Siemens S7-200 El autómata S7-200 está constituido por la CPU S7-200 y una serie de módulos de expansión adicionales, hasta un máximo de 7 en el caso de la CPU 224. CPU S7-200 La CPU S7-200 está
Autómata Siemens S7-200 El autómata S7-200 está constituido por la CPU S7-200 y una serie de módulos de expansión adicionales, hasta un máximo de 7 en el caso de la CPU 224. CPU S7-200 La CPU S7-200 está
Qué es un Microcontrolador?
 Curso de Microcontroladores Qué es un Microcontrolador? Al igual que la mayoría de las computadoras, los microcontroladores son simples ejecutores de instrucciones de propósito general. La verdadera estrella
Curso de Microcontroladores Qué es un Microcontrolador? Al igual que la mayoría de las computadoras, los microcontroladores son simples ejecutores de instrucciones de propósito general. La verdadera estrella
LCD. Las pantallas de cristal líquido o módulos LCD, como. Módulo. con interface serial
 Módulo Módulo LCD con interface serial LCD con interface serial EDISON DUQUE C. Este módulo permite mostrar, en una pantalla de cristal líquido, los mensajes que son enviados desde una computadora o un
Módulo Módulo LCD con interface serial LCD con interface serial EDISON DUQUE C. Este módulo permite mostrar, en una pantalla de cristal líquido, los mensajes que son enviados desde una computadora o un
DESCRIPCION DEL SITEMA MASTER.
 DESCRIPCION DEL SITEMA MASTER. ESTRUCTURA. El sistema MASTER (Sistema Modular para Control Adaptativo en Tiempo Real) se ha implementado en base a un computador compatible PC-AT, dotado de una tarjeta
DESCRIPCION DEL SITEMA MASTER. ESTRUCTURA. El sistema MASTER (Sistema Modular para Control Adaptativo en Tiempo Real) se ha implementado en base a un computador compatible PC-AT, dotado de una tarjeta
5. SECCIÓN DEL MICROCONTROLADOR (PROGRAMACIÓN)
") 5. SECCIÓN DEL MICROCONTROLADOR (PROGRAMACIÓN) En este capítulo se describe la parte más robusta del proyecto, la cual es la programación del microcontrolador. Ésta se compone esencialmente de dos partes,
5. SECCIÓN DEL MICROCONTROLADOR (PROGRAMACIÓN) En este capítulo se describe la parte más robusta del proyecto, la cual es la programación del microcontrolador. Ésta se compone esencialmente de dos partes,
AD2100 10 a 24Vcc 100mA (1) SI SI SI 100 mw 1Km (2) 256 bytes AD2500 10 a 24Vcc 500mA (1) SI SI SI 500 mw 3km (2) 256 bytes
 SI SI SI 100 mw 1Km (2) 256 bytes AD2500 10 a 24Vcc 500mA (1) SI SI SI 500 mw 3km (2) 256 bytes") AD2100 y AD2500 Transceptor Industrial de RF Interfaz RS232, RS485 y USB Manual de usuario e instalación Rev. 2 1. Introducción Los equipos de comunicación AD2100 y AD2500 son radio módems, los cuales
AD2100 y AD2500 Transceptor Industrial de RF Interfaz RS232, RS485 y USB Manual de usuario e instalación Rev. 2 1. Introducción Los equipos de comunicación AD2100 y AD2500 son radio módems, los cuales
Aprendiendo a programar Microcontroladores PIC en Lenguaje C con CCS
 Aprendiendo a programar Microcontroladores PIC en Lenguaje C con CCS Por Andrés Raúl Bruno Saravia Entrega Nº 8. A partir de aquí comenzaremos a usar lo aprendido en los capítulos anteriores. La única
Aprendiendo a programar Microcontroladores PIC en Lenguaje C con CCS Por Andrés Raúl Bruno Saravia Entrega Nº 8. A partir de aquí comenzaremos a usar lo aprendido en los capítulos anteriores. La única
Memoria La memoria es la parte del ordenador en la que se guardan o almacenan los programas (las instrucciones y los datos).
.") Memoria La memoria es la parte del ordenador en la que se guardan o almacenan los programas (las instrucciones y los datos). Memoria Típica. Los datos almacenados en memoria tienen que pasar, en un momento
Memoria La memoria es la parte del ordenador en la que se guardan o almacenan los programas (las instrucciones y los datos). Memoria Típica. Los datos almacenados en memoria tienen que pasar, en un momento
En el presente capítulo se describe la programación del instrumento virtual y cómo
 Capítulo 6. Instrumentación virtual En el presente capítulo se describe la programación del instrumento virtual y cómo éste controla el circuito de captura de señales, la llamada telefónica y escribe los
Capítulo 6. Instrumentación virtual En el presente capítulo se describe la programación del instrumento virtual y cómo éste controla el circuito de captura de señales, la llamada telefónica y escribe los
CAN-101, HT6P20x2 Encoder para aplicaciones remotas de control
 Nota de Aplicación: CAN-101 Título: HT6P20x2 Encoder para aplicaciones remotas de control Autor: Ing Iván C Sierra Revisiones Fecha Comentarios 0 28/01/13 En esta oportunidad le presentamos un nuevo encoder,
Nota de Aplicación: CAN-101 Título: HT6P20x2 Encoder para aplicaciones remotas de control Autor: Ing Iván C Sierra Revisiones Fecha Comentarios 0 28/01/13 En esta oportunidad le presentamos un nuevo encoder,
JUEGO DE CARRERA DE AUTOS EN LCD
 JUEGO DE CARRERA DE AUTOS EN LCD Andrés Bastidas; Nathali Gordón; Verónica Grefa; Mónica Mejía; Juan Carlos Obregón Control con Microprocesadores, Nelson Sotomayor, MSc. 1 INTRODUCCIÓN El objetivo del
JUEGO DE CARRERA DE AUTOS EN LCD Andrés Bastidas; Nathali Gordón; Verónica Grefa; Mónica Mejía; Juan Carlos Obregón Control con Microprocesadores, Nelson Sotomayor, MSc. 1 INTRODUCCIÓN El objetivo del
PROFESOR: Práctica 2. Gestión de puertos de salida
 INSTITUTO POLITÉCNICO NACIONAL Centro de Estudios Científicos y Tecnológicos Nº 1 Gonzalo Vázquez Vela Academia de Sistemas Digitales Prácticas de Micro Electrónica Programable NOMBRE DEL ALUMNO: Apellido
INSTITUTO POLITÉCNICO NACIONAL Centro de Estudios Científicos y Tecnológicos Nº 1 Gonzalo Vázquez Vela Academia de Sistemas Digitales Prácticas de Micro Electrónica Programable NOMBRE DEL ALUMNO: Apellido
Tema. Módulo Captura Comparación Modulación n de Achura de Pulsos. C. F. G.S. D.P.E. Módulo de Proyectos 1
 Tema Módulo Captura Comparación Modulación n de Achura de Pulsos C. F. G.S. D.P.E. Módulo de Proyectos 1 Módulo de Captura/ aptura/comparación/ n/pwm Los microcontroladores de la familia 16F87X disponen
Tema Módulo Captura Comparación Modulación n de Achura de Pulsos C. F. G.S. D.P.E. Módulo de Proyectos 1 Módulo de Captura/ aptura/comparación/ n/pwm Los microcontroladores de la familia 16F87X disponen
Especificaciones técnicas de los prototipos:
 Especificaciones técnicas de los prototipos: Sensor de Temperatura y Humedad Relativa Sensor de Humedad de la Hoja CARACTERÍSTICAS SENSOR HUMEDAD DE LA HOJA El Sensor de Humedad de la hoja está diseñado
Especificaciones técnicas de los prototipos: Sensor de Temperatura y Humedad Relativa Sensor de Humedad de la Hoja CARACTERÍSTICAS SENSOR HUMEDAD DE LA HOJA El Sensor de Humedad de la hoja está diseñado
Maqueta: Osciloscopio y generador
 Maqueta: Osciloscopio y generador 1. Introducción Esta práctica se divide en dos partes. En la primera se desarrolla un osciloscopio digital basado en el ADC del 80C537 y la pantalla del PC. En la segunda
Maqueta: Osciloscopio y generador 1. Introducción Esta práctica se divide en dos partes. En la primera se desarrolla un osciloscopio digital basado en el ADC del 80C537 y la pantalla del PC. En la segunda
I2C. Ing. Pablo Martín Gomez pgomez@fi.uba.ar
 I2C Ing. Pablo Martín Gomez pgomez@fi.uba.ar 1 Comunicaciones en un bus serie 2 Comunicaciones en un bus serie 3 I²C Velocidad 4 UART Universal Asynchronous Receiver Transmitter Estándar de comunicación
I2C Ing. Pablo Martín Gomez pgomez@fi.uba.ar 1 Comunicaciones en un bus serie 2 Comunicaciones en un bus serie 3 I²C Velocidad 4 UART Universal Asynchronous Receiver Transmitter Estándar de comunicación
Sistema de Control y Gestión de un Aparato Surtidor de Gasóleos y Gasolinas
 Sistema de Control y Gestión de un Aparato Surtidor de Gasóleos y Gasolinas AUTOR: Rubén Mercé Capell. DIRECTOR José Ramón López López. FECHA: Junio 2002. 1 Indice 1 Indice... 3 2 Memoria Descriptiva...
Sistema de Control y Gestión de un Aparato Surtidor de Gasóleos y Gasolinas AUTOR: Rubén Mercé Capell. DIRECTOR José Ramón López López. FECHA: Junio 2002. 1 Indice 1 Indice... 3 2 Memoria Descriptiva...
TEMPORIZADORES Y CONTADORES
 Los µc51 tienen dos temporizadores/contadores, TIMER0 y TIMER1 de 16 bits cada uno. Cuando operan como temporizadores, los registros SFR s THx y TLx son incrementados cada ciclo de máquina, desde 0000H
Los µc51 tienen dos temporizadores/contadores, TIMER0 y TIMER1 de 16 bits cada uno. Cuando operan como temporizadores, los registros SFR s THx y TLx son incrementados cada ciclo de máquina, desde 0000H
Microchip Tips & Tricks...
 ARTICULO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de EduDevices. Soluciones y Diseños de Fuentes Inteligentes Tip 99 Control remoto Infrarrojo para activación de líneas de C.A.
ARTICULO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de EduDevices. Soluciones y Diseños de Fuentes Inteligentes Tip 99 Control remoto Infrarrojo para activación de líneas de C.A.
Automatización digital de procesos. Tema B
 Automatización digital de procesos Tema B Estructura de sistema ACTUADORES PROCESO SENSORES Acciones que se realizan sobre el proceso Información suministrada por el proceso SALIDAS PLC ENTRADAS Bloques
Automatización digital de procesos Tema B Estructura de sistema ACTUADORES PROCESO SENSORES Acciones que se realizan sobre el proceso Información suministrada por el proceso SALIDAS PLC ENTRADAS Bloques
UNIVERSIDAD DON BOSCO
 CICLO 02 2013 UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLÓGICOS COORDINACIÓN DE ELECTRÓNICA GUÍA DE LABORATORIO Nº 03 ASIGNATURA: Control Digital NOMBRE DE LA PRACTICA: Configuración de los Puertos
CICLO 02 2013 UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLÓGICOS COORDINACIÓN DE ELECTRÓNICA GUÍA DE LABORATORIO Nº 03 ASIGNATURA: Control Digital NOMBRE DE LA PRACTICA: Configuración de los Puertos
Como sacarle mayor provecho a las herramientas disponibles para la familia HC908
 COMENTARIO TECNICO Hablemos de MCU s... Por Ing. Daniel Di Lella Dedicated Field Application Engineer Responsable Area Educación Elko / Arrow www.elkonet.com ddilella@elkonet.com dilella@arnet.com.ar Como
COMENTARIO TECNICO Hablemos de MCU s... Por Ing. Daniel Di Lella Dedicated Field Application Engineer Responsable Area Educación Elko / Arrow www.elkonet.com ddilella@elkonet.com dilella@arnet.com.ar Como
Tema 11. Introducción a los Microprocesadores y Microcontroladores
 Unidad 11 Introducción a los microprocesadores y microcontroladores Andres.Iborra@upct.es Juan.Suardiaz@upct.es Septiembre 2002 1 CONTENIDO Unidad 11. Introducción a los microprocesadores y microcontroladores.
Unidad 11 Introducción a los microprocesadores y microcontroladores Andres.Iborra@upct.es Juan.Suardiaz@upct.es Septiembre 2002 1 CONTENIDO Unidad 11. Introducción a los microprocesadores y microcontroladores.
Análisis general de un Microprocesador
 Análisis general de un Microprocesador Arquitectura del chip Repertorio de instrucciones Sistema mínimo Señales de control Función de cada pin del µp Herramientas de desarrollo Performance. ARQUITECTURA
Análisis general de un Microprocesador Arquitectura del chip Repertorio de instrucciones Sistema mínimo Señales de control Función de cada pin del µp Herramientas de desarrollo Performance. ARQUITECTURA
Practica de Control y Programación de Robots ROBOT HERMES. Curso 2007-2008
 Practica de Control y Programación de Robots ROBOT HERMES Curso 2007-2008 CAMPUS TECNOLÓGICO DE LA UNIVERSIDAD DE NAVARRA NAFARROAKO UNIBERTSITATEKO CAMPUS TEKNOLOGIKOA Paseo de Manuel Lardizábal 13. 20018
Practica de Control y Programación de Robots ROBOT HERMES Curso 2007-2008 CAMPUS TECNOLÓGICO DE LA UNIVERSIDAD DE NAVARRA NAFARROAKO UNIBERTSITATEKO CAMPUS TEKNOLOGIKOA Paseo de Manuel Lardizábal 13. 20018
Termostato electrónico con el PIC16F872
 Termostato electrónico con el PIC16F872 La temperatura es una de las variables físicas que más le ha preocupado a la humanidad. El termómetro de mercurio es quizás el instrumento más conocido para medir
Termostato electrónico con el PIC16F872 La temperatura es una de las variables físicas que más le ha preocupado a la humanidad. El termómetro de mercurio es quizás el instrumento más conocido para medir
El módulo LCD Ejemplos de funcionamiento
 SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 7: El módulo LCD El módulo LCD Ejemplos de funcionamiento - 1 - 1. Objetivos: - Conocer el funcionamiento y programación
SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 7: El módulo LCD El módulo LCD Ejemplos de funcionamiento - 1 - 1. Objetivos: - Conocer el funcionamiento y programación
INTERFAZ USB PARA PROFIBUS PA
 MANUAL DE INSTRUCCIONES INTERFAZ USB PARA PROFIBUS PA JAN / 13 PBI-PLUS PBI PLUSMS smar www.smar.com Especificaciones e informaciones sujetas a cambios sin previo aviso. Actualización de direcciones está
MANUAL DE INSTRUCCIONES INTERFAZ USB PARA PROFIBUS PA JAN / 13 PBI-PLUS PBI PLUSMS smar www.smar.com Especificaciones e informaciones sujetas a cambios sin previo aviso. Actualización de direcciones está
SPI. Teoría y Aplicaciones. INGENIERIA EN MICROCONTROLADORES Protocolo SPI( Serial Peripherical Interface) Protocolo
 Protocolo") Protocolo SPI INGENIERIA EN MICROCONTROLADORES Protocolo SPI( Serial Peripherical Interface) Teoría y Aplicaciones INGENIERÍA EN MICROCONTROLADORES Curso de Redes de Microcontroladores PIC (Protocolo SPI)
Protocolo SPI INGENIERIA EN MICROCONTROLADORES Protocolo SPI( Serial Peripherical Interface) Teoría y Aplicaciones INGENIERÍA EN MICROCONTROLADORES Curso de Redes de Microcontroladores PIC (Protocolo SPI)
MONITOR DE PESO CALIBRADO POR PESO CONOCIDO Y POR SENSIBILIDAD CONOCIDA MS 3.3.2
 MONITOR DE PESO CALIBRADO POR PESO CONOCIDO Y POR SENSIBILIDAD CONOCIDA MS 3.3.2 1 CONEXIONADO DEL EQUIPO: 2 3 El menú principal consta de las siguientes opciones: 1.- CALIBRACIÓN 2.- RELÉS 3.- SALIDA
MONITOR DE PESO CALIBRADO POR PESO CONOCIDO Y POR SENSIBILIDAD CONOCIDA MS 3.3.2 1 CONEXIONADO DEL EQUIPO: 2 3 El menú principal consta de las siguientes opciones: 1.- CALIBRACIÓN 2.- RELÉS 3.- SALIDA
MICROCONTROLADORES PIC16F84 ING. RAÚL ROJAS REÁTEGUI
 MICROCONTROLADORES PIC16F84 ING. RAÚL ROJAS REÁTEGUI DEFINICIÓN Es un microcontrolador de Microchip Technology fabricado en tecnología CMOS, completamente estático es decir si el reloj se detiene los datos
MICROCONTROLADORES PIC16F84 ING. RAÚL ROJAS REÁTEGUI DEFINICIÓN Es un microcontrolador de Microchip Technology fabricado en tecnología CMOS, completamente estático es decir si el reloj se detiene los datos
ELECTRÓNICA - SOFTWARE - AUTOMATION www.delcomp.pe 2011 DELCOMP S.A.C.
 TABLA DE CONTENIDOS 1) INTRODUCCIÓN 2) CONECTIVIDAD 3) TCP/IP 4) MODULOS 5) EJEMPLOS INTRODUCCIÓN La Tarjeta de Desarrollo PIC 18FJ S1 es un módulo de desarrollo electrónico con Microcontroladores práctico
TABLA DE CONTENIDOS 1) INTRODUCCIÓN 2) CONECTIVIDAD 3) TCP/IP 4) MODULOS 5) EJEMPLOS INTRODUCCIÓN La Tarjeta de Desarrollo PIC 18FJ S1 es un módulo de desarrollo electrónico con Microcontroladores práctico
UNIVERSIDAD TECNICA FEDERICO SANTA MARIA DEPARTAMENTO DE ELECTRONICA Diseño con Microcontroladores
 WATCHDOG TIMER El watchdog timer es un temporizador de 16 bit que puede ser usado como watchdog o por intervalos de tiempo. Al iniciarse un programa, el watchdog timer está activo y configurado por defecto
WATCHDOG TIMER El watchdog timer es un temporizador de 16 bit que puede ser usado como watchdog o por intervalos de tiempo. Al iniciarse un programa, el watchdog timer está activo y configurado por defecto
TEMA 6 MICROCONTROLADORES. PIC 16F84. 1. Introducción. 1.1. Referencia histórica.
 T-6 Microcontroladores. PIC16F84. 1 TEMA 6 MICROCONTROLADORES. PIC 16F84. 1. Introducción. En las aplicaciones sencillas resultan preferibles las soluciones no programables que no requieren desarrollo
T-6 Microcontroladores. PIC16F84. 1 TEMA 6 MICROCONTROLADORES. PIC 16F84. 1. Introducción. En las aplicaciones sencillas resultan preferibles las soluciones no programables que no requieren desarrollo
REGISTROS DE DESPLAZAMIENTO
 REGISTROS DE DESPLAZAMIENTO Es un circuito digital que acepta datos binarios de una fuente de entrada y luego los desplaza, un bit a la vez, a través de una cadena de flip-flops. Este sistema secuencial
REGISTROS DE DESPLAZAMIENTO Es un circuito digital que acepta datos binarios de una fuente de entrada y luego los desplaza, un bit a la vez, a través de una cadena de flip-flops. Este sistema secuencial
Programación del Timer1 para la captura de flancos
 Basic Express Nota de aplicación Programación del Timer1 para la captura de flancos El temporizador Timer1 y el pin de entrada El procesador BasicX incluye un temporizador integrado denominado Timer1.
Basic Express Nota de aplicación Programación del Timer1 para la captura de flancos El temporizador Timer1 y el pin de entrada El procesador BasicX incluye un temporizador integrado denominado Timer1.
TARJETA CONVERSORA ANALOGA/DIGITAL (A/D)
") TARJETA CONVERSORA ANALOGA/DIGITAL (A/D) 1. INTRODUCCIÓN. Un conversor A/D es un dispositivo que mapea una tensión análoga en un código o palabra digital de n bits. Para esto toma muestras de la señal
TARJETA CONVERSORA ANALOGA/DIGITAL (A/D) 1. INTRODUCCIÓN. Un conversor A/D es un dispositivo que mapea una tensión análoga en un código o palabra digital de n bits. Para esto toma muestras de la señal
Componentes: RESISTENCIAS FIJAS
 ELECTRÓNICA ELECTRÓNICA Componentes: RESISTENCIAS FIJAS Componentes: RESISTENCIAS VARIABLES Componentes: RESISTENCIAS DEPENDIENTES Componentes: RESISTENCIAS DEPENDIENTES Componentes: CONDENSADORES Componentes:
ELECTRÓNICA ELECTRÓNICA Componentes: RESISTENCIAS FIJAS Componentes: RESISTENCIAS VARIABLES Componentes: RESISTENCIAS DEPENDIENTES Componentes: RESISTENCIAS DEPENDIENTES Componentes: CONDENSADORES Componentes:
GRADO EN INGENIERÍA ELECTRÓNICA Y AUTOMÁTICA INDUSTRIAL
 Sistemas Electrónicos Digitales Avanzados GRADO EN INGENIERÍA ELECTRÓNICA Y AUTOMÁTICA INDUSTRIAL PRÁCTICA FINAL GENERADOR AVANZADO DE FORMAS DE ONDA Dpto. Electrónica Curso 2013/2014 1. Introducción La
Sistemas Electrónicos Digitales Avanzados GRADO EN INGENIERÍA ELECTRÓNICA Y AUTOMÁTICA INDUSTRIAL PRÁCTICA FINAL GENERADOR AVANZADO DE FORMAS DE ONDA Dpto. Electrónica Curso 2013/2014 1. Introducción La
PROTEUS Depuración de programas para microprocesadores
 PROTEUS Depuración de programas para microprocesadores Introducción Como ya se ha indicado en temas anteriores, la aplicación PROTEUS, tiene entre sus utilidades la simulación de los esquemas realizados
PROTEUS Depuración de programas para microprocesadores Introducción Como ya se ha indicado en temas anteriores, la aplicación PROTEUS, tiene entre sus utilidades la simulación de los esquemas realizados
Buceando en el HC908...
 COMENTARIO TÉCNICO Buceando en el HC908... Por Ing. Daniel Di Lella Dedicated Field Application Engineer www.edudevices.com.ar dilella@arnet.com.ar Practicando con el CodeWarrior 5.1/6.x y el sistema R(S)_POD...
COMENTARIO TÉCNICO Buceando en el HC908... Por Ing. Daniel Di Lella Dedicated Field Application Engineer www.edudevices.com.ar dilella@arnet.com.ar Practicando con el CodeWarrior 5.1/6.x y el sistema R(S)_POD...
Gestión digital sencilla de controladores de fuentes de alimentación analógicas
 COMENTARIO TECNICO Gestión digital sencilla de controladores de fuentes de alimentación analógicas Por Josh Mandelcorn, miembro del equipo técnico de Texas Instruments Normalmente, el control digital de
COMENTARIO TECNICO Gestión digital sencilla de controladores de fuentes de alimentación analógicas Por Josh Mandelcorn, miembro del equipo técnico de Texas Instruments Normalmente, el control digital de
Estructura de Computadores
 Estructura de Computadores Tema 4. El procesador Departamento de Informática Grupo de Arquitectura de Computadores, Comunicaciones y Sistemas UNIVERSIDAD CARLOS III DE MADRID Contenido Elementos de un
Estructura de Computadores Tema 4. El procesador Departamento de Informática Grupo de Arquitectura de Computadores, Comunicaciones y Sistemas UNIVERSIDAD CARLOS III DE MADRID Contenido Elementos de un
TELEMANDO TELEFONICO I-207.2
 TELEMANDO TELEFONICO CARACTERISTICAS TECNICAS Alimentación 12 V cc. Consumo máximo 150 ma. Salidas reles / Carga máxima 230 Vca / 3A max Peso neto 78 grs Dimensiones 87 x 72 x 27 mm Temperatura trabajo
TELEMANDO TELEFONICO CARACTERISTICAS TECNICAS Alimentación 12 V cc. Consumo máximo 150 ma. Salidas reles / Carga máxima 230 Vca / 3A max Peso neto 78 grs Dimensiones 87 x 72 x 27 mm Temperatura trabajo
4.1. Índice del tema...1 4.2. El Condensador...2 4.2.1. Introducción...2 4.2.2. Potencia...3 4.2.3. Energía...3 4.2.4. Condición de continuidad...
 TEMA 4: CAPACITORES E INDUCTORES 4.1. Índice del tema 4.1. Índice del tema...1 4.2. El Condensador...2 4.2.1. Introducción...2 4.2.2. Potencia...3 4.2.3. Energía...3 4.2.4. Condición de continuidad...4
TEMA 4: CAPACITORES E INDUCTORES 4.1. Índice del tema 4.1. Índice del tema...1 4.2. El Condensador...2 4.2.1. Introducción...2 4.2.2. Potencia...3 4.2.3. Energía...3 4.2.4. Condición de continuidad...4
Proyecto Prototipo Domótica
 Proyecto Prototipo Domótica Alumnos: Marcelo Mella Urrutia David Moena Quijada Carlos Román Saavedra Sergio Sánchez Reyes Profesor: Yussef Farrán Fecha Entrega: 20 de Junio de 2005 TEMARIO INTRODUCCIÓN..3
Proyecto Prototipo Domótica Alumnos: Marcelo Mella Urrutia David Moena Quijada Carlos Román Saavedra Sergio Sánchez Reyes Profesor: Yussef Farrán Fecha Entrega: 20 de Junio de 2005 TEMARIO INTRODUCCIÓN..3
Actividad 4: Comunicación entre PLC s vía Ethernet
 Actividad 4: Comunicación entre PLC s vía Ethernet 1.- Listado de materiales: PC con Tarjeta de red 3com o similar. 2 PLC Omrom CJ1M CPU11 ETN Estos autómatas llevan integrada la tarjeta de comunicaciones
Actividad 4: Comunicación entre PLC s vía Ethernet 1.- Listado de materiales: PC con Tarjeta de red 3com o similar. 2 PLC Omrom CJ1M CPU11 ETN Estos autómatas llevan integrada la tarjeta de comunicaciones
GUIA RÁPIDA UNIDAD DE DEVICENET CJ1W-DRM21 ESTE MANUAL CONTIENE: 1.- CARACTERÍSTICAS. 2.- NOMENCLATURA Y FUNCIONES. 3.- ÁREAS CIO Y DM.
 GUIA RÁPIDA UNIDAD DE DEVICENET CJ1W-DRM21 ESTE MANUAL CTIENE: 1.- CARACTERÍSTICAS. 2.- NOMENCLATURA Y FUNCIES. 3.- ÁREAS CIO Y DM. 1.- Características. G.R. CJ1W-DRM21. 1.- Características. La tarjeta
GUIA RÁPIDA UNIDAD DE DEVICENET CJ1W-DRM21 ESTE MANUAL CTIENE: 1.- CARACTERÍSTICAS. 2.- NOMENCLATURA Y FUNCIES. 3.- ÁREAS CIO Y DM. 1.- Características. G.R. CJ1W-DRM21. 1.- Características. La tarjeta
Familias de microcontroladores de radio frecuencia.
 CAPITULO 3 Familias de microcontroladores de radio frecuencia. 3.1 Familias de rfpics. MICROCHIP ha desarrollado unas familias de microcontroladores con un anexo, que es una unidad transmisora de ASK o
CAPITULO 3 Familias de microcontroladores de radio frecuencia. 3.1 Familias de rfpics. MICROCHIP ha desarrollado unas familias de microcontroladores con un anexo, que es una unidad transmisora de ASK o
Quark Pro 2 Cargador de Microcontroladores PIC y Memorias EEPROM 24CXX
 Art Tapa - QuarkPro 2 19/2/04 2:09 PM Page 3 ARTÍCULO DE TAPA Quark Pro 2 Cargador de Microcontroladores PIC y Memorias EEPROM 24CXX Hemos desarrollado un prototipo económico, pero de alto desempeño para
Art Tapa - QuarkPro 2 19/2/04 2:09 PM Page 3 ARTÍCULO DE TAPA Quark Pro 2 Cargador de Microcontroladores PIC y Memorias EEPROM 24CXX Hemos desarrollado un prototipo económico, pero de alto desempeño para
Tablero Transferencia Automático
 Tablero Transferencia Automático Ing. Schönfeld, Javier - Ing. Tardivo, Juan Pablo Servicios Para el Transporte de Información S.A. Empresa del grupo Boldt jschonfe@boldt.com.ar - jtardivo@boldt.com.ar
Tablero Transferencia Automático Ing. Schönfeld, Javier - Ing. Tardivo, Juan Pablo Servicios Para el Transporte de Información S.A. Empresa del grupo Boldt jschonfe@boldt.com.ar - jtardivo@boldt.com.ar