Competencia de Robótica R2-D2 2014
|
|
|
- Francisco Javier Villalba Roldán
- hace 8 años
- Vistas:
Transcripción
1 Competencia de Robótica R2-D Categoría: Velocista Nombre del Robot: Miyagui Institución: UTN-FRA Participantes: Calvo, Juan Ignacio Schuster, Mariela Medina, Sergio Daniel

2 Índice 1. Introducción Descripción básica de funcionamiento Objetivos Mecánica Descripción de la estructura mecánica Especificaciones Técnicas Electrónica Descripción del circuito y mención de los integrados utilizados Esquemático y/o PCB... 5 PCB Lado superior (Doble Capa)... 5 PCB Lado inferior (Doble Capa)... 5 Máscara de componentes:... 6 Esquemático General Programación Método de programación y programador utilizado Descripción de la lógica del código y lenguaje utilizado Conclusión... 9

3 1. Introducción 1.1. Descripción básica de funcionamiento El Robot cuenta con una estructura de pcb espumado, dos motores, uno por cada rueda trasera, y un soporte de apoyo en su parte delantera. También con 3 sensores IR en su parte delantera, con los que sensa la línea blanca, a partir de sus lecturas, se varían las velocidad de los motores con los que se corrige el recorrido. Su control se lleva a cabo por un microcontrolador, ATmega Objetivos El objetivo del diseño fue lograr una estructura resistente y a su vez fácil de armar, un material sencillo de trabajar como lo es el pbc espumado, económico y simple. 2. Mecánica 2.1. Descripción de la estructura mecánica La transmisión de los motores se realiza a través de una corona al eje. Cada uno de los motores traseros tiene su propia corona y rueda. En la parte delantera, solo tiene un punto de apoyo Especificaciones Técnicas 2 Motores Mabuchi: 4W 8000rpm 1 batería lipo de 7,4 volts 1200mah 3. Electrónica 3.1. Descripción del circuito y mención de los integrados utilizados Básicamente el circuito consta de las siguientes etapas: Etapa de Alimentacion: Es la etapa que se encarga de regular la tension para que el resto de las etapas funcionen correctamente. Logica de control: Basicamente es la etapa donde se encuentra el microcontrolador, con los diferenctes elementos basicos para su correcto funcionamiento. Etapa de sensado: Es la etapa que se encarga de captar la linea a seguir. Etapa de Potencia: Es la etapa donde se realiza el control de los motores usados. A continuación serán detalladas estas etapas más en profundidad. Etapa de Alimentacion: Es la etapa que se encarga de regular la tension para que el resto de las etapas funcionen correctamente. En un principio, la alimentación general se realiza con una batería de 7,4 volts. Será necesario reducir esta tensión a 5V para que el funcionamiento de las proximas etapas. Para ello se utilizará un regulador de tensión, basado en el integrado LM2576HV, que básicamente permite implementa

4 una fuente switching simple y con pocos componentes externos (Solo una bobina externa, un diodo zener y un capacitor). Logica de Control: Basicamente es la etapa donde se encuentra el microcontrolador, con los diferentes elementos basicos para su correcto funcionamiento. El microcontrolador elegido es un ATMEGA128, trabajando a una frecuencia de 16MHz, por medio de un cristal externo. En ésta etapa alrededor del microcontrolador hay toda una serie de conectores que facilitan cualquier expansión futura, además de los pines reservados para el programador. Cuenta con un pulsador de reset manual. Etapa de sensado: Es la etapa que se encarga de captar la linea a seguir. La idea de esta etapa es, según que tan sobre la linea se encuentre el robot, obtener una medida analógica de ésta posición. Ésto se consigue mediate el uso del sensor TCRT1000, un sensor óptico reflectivo, que en el mismo encapsulado posee el transmisor y receptor (fototransistor). Se agrego proximo a los sensores TCRT1000, un diodo IR a cada uno para aumentar la sensibilidad de las mediciones. Etapa de Potencia: Es la etapa donde se realiza el control de los motores usados. Para ello se emplea el control del tipo puente h, con lo cual se decidió usar el driver L298. A la entrada de dicho integrado se deberá ingresar la señal de control para cada motor (modulado por el microcontrolador) y la señal de selección (entradas digitales). Se agregan diodos freewheel para eliminar las tensiones inversas que, a travez de la carga, pueden dañar el sistema.

 PCB Lado inferior (Doble")
5 3.2. Esquemático y/o PCB PCB Lado superior (Doble Capa) PCB Lado inferior (Doble Capa)
")
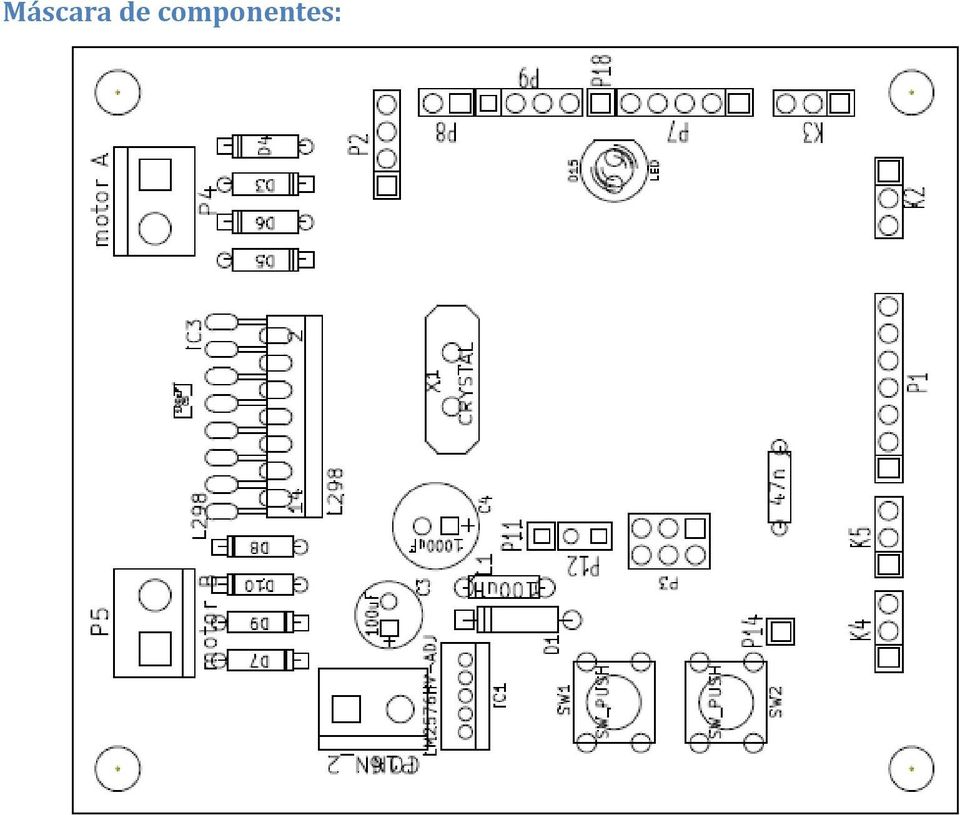
6 Máscara de componentes:
7 Esquemático General

8 4. Programación 4.1. Método de programación y programador utilizado Se decidió usar un micro de la empresa ATMEL, en particular el microcontrolador Atmega128, de 8 bits. Para ello se debería usar un programador compatible con éste, en este caso, el USBtiny, al ser el más accesible. Optamos por usar un IDE, en nuestro caso el Eclipse, que nos permitiría trabajar como un proyecto, hacer control de versiones, programación, etc, además de contar con complementos para tal fin Descripción de la lógica del código y lenguaje utilizado El control del seguimiento de linea del proyecto se basa en un control del tipo PID, que básicamente es un control por realimentación que mediante el calculo del error respecto a un valor deseado, permitirá hacer un ajuste adecuado. Para ello el PID trabaja con tres parámetro: el proporcional, el integral, y el derivativo. Proporcional determina la reacción del error actual. Integral genera una corrección proporcional a la integral del error (el error de seguimiento se reduce a cero al aplicar la correccion adecuada). Derivativo determina la reacción del tiempo en el que el error se produce. La suma de estas tres parámetros es usada para ajustar la velocidad general del sistema. En nuestreo caso particular, para generar una variacion de velocidad se deberá ir alternando las velocidades, de la rueda izquierda o derecha, según corresponda. La velocidad final estará definida por el grado de modulación del PWM que controla los motores, con lo cual la velocidad del cada motor está relacionada con el valor de los registros de control dedicados a tal fin en el microcontrolador. Según éste criterio, el control PID se encarga de definir el valor que tendrá la salida de PWM del microcontrolador para cada motor. Se definió un modulo de Timer para el control de los PWM de los motores, y se lo configuró para trabajar en tal modo (Modo PWM). Cuatro pines de puertos de I/O se destinaron a la selección para el driver de los motores. En cuanto a las entradas medidas en la etapa de sensado, se realiza una conversión del valor obtenido por medio del periférico de conversión Analógico- Digital. Son tres las entradas analógicas usadas (Para la línea central y las dos laterales).

9 5. Conclusión El proyecto que en un principio parecía tener un mayor grado de dificultad, a medida que fuimos avanzando en el desarrollo, vimos cómo se fue simplificando en gran medida. En un principio optamos por una estructura ligera y resistente, que resulto relativamente económica y viable y que cumplió muy bien con las exigencias que le dimos. Posteriormente hicimos la elección de los motores, una tarea que resulto simple. Para hacer el control de ellos empleamos un puente h, el cual fue implementado mediante un driver accesible y que nos evitó la tarea de desarrollarlo con MOSFET (restándole posible problemas relacionados a esto), ya desde el primer momento, una vez montado el microcontrolador en la placa principal pudimos empezar a hacer pruebas sobre ellos. Implementamos una etapa de sensado prácticamente con la misma facilidad, y con esto ya teníamos datos para el control. Desde el punto de vista del hardware, llevar a delante un seguidor de línea de éstas características resulta muy viable. En cuanto al firmware que deberá desarrollarse para el microcontrolador, se pueden conseguir resultados muy buenos resultados implementando un simple control onoff de lo más básico, y hay una amplia variedad de técnicas para el control del proceso, como implementar un PID, para asegurar un mejor rendimiento. De este modo la mayor dificultad, y un punto a seguir trabajando, es el software.

podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que el
 CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
C A P Í T U L O 2 CIRCUITOS
 C A P Í T U L O 2 DIAGRAMAS ESQUEMÁTICOS Y PCB DE LOS CIRCUITOS 2.1. FUENTE DE PODER. Esta fuente de voltaje DC es del tipo de fuentes lineales; es decir utiliza un paso reductor de voltaje haciendo uso
C A P Í T U L O 2 DIAGRAMAS ESQUEMÁTICOS Y PCB DE LOS CIRCUITOS 2.1. FUENTE DE PODER. Esta fuente de voltaje DC es del tipo de fuentes lineales; es decir utiliza un paso reductor de voltaje haciendo uso
Capítulo 6: Conclusiones
 Capítulo 6: Conclusiones 6.1 Conclusiones generales Sobre el presente trabajo se obtuvieron varias conclusiones sobre la administración del ancho de banda en una red inalámbrica, basadas en la investigación
Capítulo 6: Conclusiones 6.1 Conclusiones generales Sobre el presente trabajo se obtuvieron varias conclusiones sobre la administración del ancho de banda en una red inalámbrica, basadas en la investigación
Propuesta de colaboración. ESC para bicicleta eléctrica
 Propuesta de colaboración ESC para bicicleta eléctrica Tabla de Contenidos 1. Integrantes del proyecto... 3 2. Antecedentes y objetivos... 4 3. Algoritmo de control... 5 4. Descripción del proyecto...
Propuesta de colaboración ESC para bicicleta eléctrica Tabla de Contenidos 1. Integrantes del proyecto... 3 2. Antecedentes y objetivos... 4 3. Algoritmo de control... 5 4. Descripción del proyecto...
Preguntas y respuestas técnicas sobre motores eléctricos traccionarios.
 Preguntas y respuestas técnicas sobre motores eléctricos traccionarios. Organización Autolibre. Cómo funciona un motor Eléctrico? Un motor eléctrico es un dispositivo que puede producir una fuerza cuando
Preguntas y respuestas técnicas sobre motores eléctricos traccionarios. Organización Autolibre. Cómo funciona un motor Eléctrico? Un motor eléctrico es un dispositivo que puede producir una fuerza cuando
HARDWARE DE SISTEMA AUTOMÁTICO DE RASTREO DE VEHÍCULOS MEDIANTE TECNOLOGÍAS GPRS Y GPS
 HARDWARE DE SISTEMA AUTOMÁTICO DE RASTREO DE VEHÍCULOS MEDIANTE TECNOLOGÍAS GPRS Y GPS Ing. Javier A. Garabello Facultad Regional Villa María UTN Av. Universidad 450 Tel: 0353-4537500 javiergarabello@hotmail.com
HARDWARE DE SISTEMA AUTOMÁTICO DE RASTREO DE VEHÍCULOS MEDIANTE TECNOLOGÍAS GPRS Y GPS Ing. Javier A. Garabello Facultad Regional Villa María UTN Av. Universidad 450 Tel: 0353-4537500 javiergarabello@hotmail.com
Gestión digital sencilla de controladores de fuentes de alimentación analógicas
 COMENTARIO TECNICO Gestión digital sencilla de controladores de fuentes de alimentación analógicas Por Josh Mandelcorn, miembro del equipo técnico de Texas Instruments Normalmente, el control digital de
COMENTARIO TECNICO Gestión digital sencilla de controladores de fuentes de alimentación analógicas Por Josh Mandelcorn, miembro del equipo técnico de Texas Instruments Normalmente, el control digital de
Guía para construir un programador y una mini placa de desarrollo para el microcontrolador PIC
 Guía para construir un programador y una mini placa de desarrollo para el microcontrolador PIC Rafael Fernández Andrés Aguirre Introducción: Esto de ninguna manera pretende ser una guía completa de como
Guía para construir un programador y una mini placa de desarrollo para el microcontrolador PIC Rafael Fernández Andrés Aguirre Introducción: Esto de ninguna manera pretende ser una guía completa de como
Control de procesos. Introducción
 Control de procesos Introducción El objeto de todo proceso industrial será la obtención de un producto final, de unas características determinadas de forma que cumpla con las especificaciones y niveles
Control de procesos Introducción El objeto de todo proceso industrial será la obtención de un producto final, de unas características determinadas de forma que cumpla con las especificaciones y niveles
Transformación de binario a decimal. Transformación de decimal a binario. ELECTRÓNICA DIGITAL
 ELECTRÓNICA DIGITAL La electrónica es la rama de la ciencia que se ocupa del estudio de los circuitos y de sus componentes, que permiten modificar la corriente eléctrica amplificándola, atenuándola, rectificándola
ELECTRÓNICA DIGITAL La electrónica es la rama de la ciencia que se ocupa del estudio de los circuitos y de sus componentes, que permiten modificar la corriente eléctrica amplificándola, atenuándola, rectificándola
CAPITULO IV. Pruebas y resultados.
 CAPITULO IV. Pruebas y resultados. 4.1 Introducción En este capítulo, se comentarán las pruebas realizadas al prototipo. También, se comentarán los resultados obtenidos durante estas pruebas a razón de
CAPITULO IV. Pruebas y resultados. 4.1 Introducción En este capítulo, se comentarán las pruebas realizadas al prototipo. También, se comentarán los resultados obtenidos durante estas pruebas a razón de
PRÁCTICA NÚMERO 1. MANEJO DEL OSCILOSCOPIO Y DEL GENERADOR DE SEÑALES.
 PRÁCTICA NÚMERO 1. MANEJO DEL OSCILOSCOPIO Y DEL GENERADOR DE SEÑALES. 1.1. Introducción Teórica. (a) El osciloscopio El osciloscopio es básicamente un dispositivo de visualización gráfica que muestra
PRÁCTICA NÚMERO 1. MANEJO DEL OSCILOSCOPIO Y DEL GENERADOR DE SEÑALES. 1.1. Introducción Teórica. (a) El osciloscopio El osciloscopio es básicamente un dispositivo de visualización gráfica que muestra
Microchip Tips & Tricks...
 ARTICULO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de EduDevices. Soluciones y Diseños de Fuentes Inteligentes Tip 99 Control remoto Infrarrojo para activación de líneas de C.A.
ARTICULO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de EduDevices. Soluciones y Diseños de Fuentes Inteligentes Tip 99 Control remoto Infrarrojo para activación de líneas de C.A.
ELO20_FOC. Particularmente yo, lo hice andar para 27MHz haciendo oscilar un cristal de 9MHz en su tercer armónico.
 Transmisor AM Este circuito se basa en un transmisor simple de RF. Incorpora un oscilador de cristal en sobre tono ideal para un 3er armónico, un amplificador y un filtro. El propósito de estos circuitos
Transmisor AM Este circuito se basa en un transmisor simple de RF. Incorpora un oscilador de cristal en sobre tono ideal para un 3er armónico, un amplificador y un filtro. El propósito de estos circuitos
Universidad Autónoma de Baja California Facultad de Ingeniería Mexicali
 Sumadores En este documento se describe el funcionamiento del circuito integrado 7483, el cual implementa un sumador binario de 4 bits. Adicionalmente, se muestra la manera de conectarlo con otros dispositivos
Sumadores En este documento se describe el funcionamiento del circuito integrado 7483, el cual implementa un sumador binario de 4 bits. Adicionalmente, se muestra la manera de conectarlo con otros dispositivos
Práctica 2 - Motores
 Práctica 2 - Motores INTRODUCCIÓN - Motores DC vs Servo motores Un motor de corriente directa cuenta con dos conexiones. La corriente eléctrica es proporcionada a través de estas conexiones, y por dentro
Práctica 2 - Motores INTRODUCCIÓN - Motores DC vs Servo motores Un motor de corriente directa cuenta con dos conexiones. La corriente eléctrica es proporcionada a través de estas conexiones, y por dentro
'A Colombia le va a tocar traer córneas desde otros países' La doctora Carmen Barraquer lanza una voz de alerta por el déficit de estos componentes.
 El Tiempo. 25 de octubre de 2013. DL1 'A Colombia le va a tocar traer córneas desde otros países' La doctora Carmen Barraquer lanza una voz de alerta por el déficit de estos componentes. En Colombia nunca
El Tiempo. 25 de octubre de 2013. DL1 'A Colombia le va a tocar traer córneas desde otros países' La doctora Carmen Barraquer lanza una voz de alerta por el déficit de estos componentes. En Colombia nunca
COMUNIDAD DE FORMADORES DEL EMPRENDIMIENTO TECNOLÓGICO FEMPRETEC
 FEMPRETEC COMUNIDAD DE FORMADORES DEL EMPRENDIMIENTO TECNOLÓGICO FEMPRETEC Propuesta para el desarrollo de semilleros de investigación en Automatización y control. wcastillo90@hotmail.com, hugo.alex30@gmail.com,
FEMPRETEC COMUNIDAD DE FORMADORES DEL EMPRENDIMIENTO TECNOLÓGICO FEMPRETEC Propuesta para el desarrollo de semilleros de investigación en Automatización y control. wcastillo90@hotmail.com, hugo.alex30@gmail.com,
5. Despliegue en la PC
 5 DESPLIEGUE EN LA PC 62 5.1 Conexión a la PC por medio de la tarjeta de audio La adquisición de señales analógicas es un trabajo que cada vez se hace más necesario en todos los campos relacionados con
5 DESPLIEGUE EN LA PC 62 5.1 Conexión a la PC por medio de la tarjeta de audio La adquisición de señales analógicas es un trabajo que cada vez se hace más necesario en todos los campos relacionados con
Int. a las ciencias computacionales
 Int. a las ciencias computacionales Representación grafica de cómo se encuentran conectados los ordenadores (nodos) en una red. Es la forma en que esta diseñada la red, bien FISICAMENTE (rigiéndose de
Int. a las ciencias computacionales Representación grafica de cómo se encuentran conectados los ordenadores (nodos) en una red. Es la forma en que esta diseñada la red, bien FISICAMENTE (rigiéndose de
INGENIERÍA AUTOMOTRIZ DISEÑO Y CONSTRUCCIÓN DE UN BANCO PARA COMPROBACIÓN Y DIAGNÓSTICO DE ECUS UTILIZADAS EN LA LÍNEA CHEVROLET EN ECUADOR
 INGENIERÍA AUTOMOTRIZ DISEÑO Y CONSTRUCCIÓN DE UN BANCO PARA COMPROBACIÓN Y DIAGNÓSTICO DE ECUS UTILIZADAS EN LA LÍNEA CHEVROLET EN ECUADOR DIRECTOR: ING. GERMÁN ERAZO CODIRECTOR: ING. LUIS MENA AUTOR:
INGENIERÍA AUTOMOTRIZ DISEÑO Y CONSTRUCCIÓN DE UN BANCO PARA COMPROBACIÓN Y DIAGNÓSTICO DE ECUS UTILIZADAS EN LA LÍNEA CHEVROLET EN ECUADOR DIRECTOR: ING. GERMÁN ERAZO CODIRECTOR: ING. LUIS MENA AUTOR:
P9: ENSAYO DE VACÍO Y CORTOCIRCUITO DEL TRANSFORMADOR MONOFÁSICO FUNDAMENTOS DE TECNOLOGÍA ELÉCTRICA
 ESCUELA UNIVERSITARIA DE INGENIERÍA TÉCNICA INDUSTRIAL (BILBAO) Departamento de Ingeniería Eléctrica INDUSTRI INGENIARITZA TEKNIKORAKO UNIBERTSITATE-ESKOLA (BILBO) Ingeniaritza Elektriko Saila ALUMNO P9:
ESCUELA UNIVERSITARIA DE INGENIERÍA TÉCNICA INDUSTRIAL (BILBAO) Departamento de Ingeniería Eléctrica INDUSTRI INGENIARITZA TEKNIKORAKO UNIBERTSITATE-ESKOLA (BILBO) Ingeniaritza Elektriko Saila ALUMNO P9:
INTERRUPTOR SÒNICO PARA LUCES
 INTERRUPTOR SÒNICO PARA LUCES Área temática: industria Autor: Reymi then universidad tecnológica de santiago- republica dominicana e-mail: reymi00@hotmail.com Surgimiento El desarrollo de este interruptor
INTERRUPTOR SÒNICO PARA LUCES Área temática: industria Autor: Reymi then universidad tecnológica de santiago- republica dominicana e-mail: reymi00@hotmail.com Surgimiento El desarrollo de este interruptor
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION
 CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
INTRODUCCIÓN A LA INSTRUMENTACIÓN BÁSICA. Nociones básicas sobre el manejo de LOS EQUIPOS DEL LABORATORIO
 INTRODUCCIÓN A LA INSTRUMENTACIÓN BÁSICA Esta documentación tiene como objetivo facilitar el primer contacto del alumno con la instrumentación básica de un. Como material de apoyo para el manejo de la
INTRODUCCIÓN A LA INSTRUMENTACIÓN BÁSICA Esta documentación tiene como objetivo facilitar el primer contacto del alumno con la instrumentación básica de un. Como material de apoyo para el manejo de la
EducaBot. Sensores 2º parte.
 CURSO PROVINCIAL: CONTROL Y ROBÓTICA EN TECNOLOGÍA ROBÓTICA EDUCATIVA EducaBot. Sensores 2º parte. Manuel Hidalgo Díaz Noviembre 2009 Nivel de reacción. Al EducaBot se le va a añadir unos sensores para
CURSO PROVINCIAL: CONTROL Y ROBÓTICA EN TECNOLOGÍA ROBÓTICA EDUCATIVA EducaBot. Sensores 2º parte. Manuel Hidalgo Díaz Noviembre 2009 Nivel de reacción. Al EducaBot se le va a añadir unos sensores para
El acondicionamiento de una señal consiste en la manipulación electrónica de dicha señal,
 Acondicionamiento y Caracterización de las Señales Obtenidas por los Sensores de Presión 4.1 Introducción El acondicionamiento de una señal consiste en la manipulación electrónica de dicha señal, con los
Acondicionamiento y Caracterización de las Señales Obtenidas por los Sensores de Presión 4.1 Introducción El acondicionamiento de una señal consiste en la manipulación electrónica de dicha señal, con los
Control de motores de CC
 Control de motores de CC Control por modulación de ancho de Pulso (PWM) Prof: Bolaños D (versión 1-8-11) Aportes propios y de Internet Uno de los problemas más fundamentales de la robótica es el control
Control de motores de CC Control por modulación de ancho de Pulso (PWM) Prof: Bolaños D (versión 1-8-11) Aportes propios y de Internet Uno de los problemas más fundamentales de la robótica es el control
Generación de Corriente Alterna
 Electricidad Generación de Corriente Alterna Elaborado Por: Germán Fredes / Escuela de Educación Técnica Nº1 Juan XXIII de Marcos Paz Introducción En la actualidad la mayoría de los artefactos que tenemos
Electricidad Generación de Corriente Alterna Elaborado Por: Germán Fredes / Escuela de Educación Técnica Nº1 Juan XXIII de Marcos Paz Introducción En la actualidad la mayoría de los artefactos que tenemos
SISTEMAS DE NUMERACIÓN. Sistema decimal
 SISTEMAS DE NUMERACIÓN Sistema decimal Desde antiguo el Hombre ha ideado sistemas para numerar objetos, algunos sistemas primitivos han llegado hasta nuestros días, tal es el caso de los "números romanos",
SISTEMAS DE NUMERACIÓN Sistema decimal Desde antiguo el Hombre ha ideado sistemas para numerar objetos, algunos sistemas primitivos han llegado hasta nuestros días, tal es el caso de los "números romanos",
Diseño e Implementación de un Sistema de Monitoreo Inalámbrico para Sistemas Embebidos
 I CONGRESO VIRTUAL DE MICROCONTROLADORES Y SUS APLICACIONES 1 Diseño e Implementación de un Sistema de Monitoreo Inalámbrico para Sistemas Embebidos Juan Felipe Medina L., John Edward Salazar D., Nicolás
I CONGRESO VIRTUAL DE MICROCONTROLADORES Y SUS APLICACIONES 1 Diseño e Implementación de un Sistema de Monitoreo Inalámbrico para Sistemas Embebidos Juan Felipe Medina L., John Edward Salazar D., Nicolás
MEDICIONES ELECTRICAS I
 Año:... Alumno:... Comisión:... MEDICIONES ELECTRICAS I Trabajo Práctico N 6 Tema: PUENTES DE CORRIENTE CONTINUA Y DE CORRIENTE ALTERNA. Q - METER Introducción Las mediciones de precisión de los valores
Año:... Alumno:... Comisión:... MEDICIONES ELECTRICAS I Trabajo Práctico N 6 Tema: PUENTES DE CORRIENTE CONTINUA Y DE CORRIENTE ALTERNA. Q - METER Introducción Las mediciones de precisión de los valores
Como sacarle mayor provecho a las herramientas disponibles para la familia HC908
 COMENTARIO TECNICO Hablemos de MCU s... Por Ing. Daniel Di Lella Dedicated Field Application Engineer Responsable Area Educación Elko / Arrow www.elkonet.com ddilella@elkonet.com dilella@arnet.com.ar Como
COMENTARIO TECNICO Hablemos de MCU s... Por Ing. Daniel Di Lella Dedicated Field Application Engineer Responsable Area Educación Elko / Arrow www.elkonet.com ddilella@elkonet.com dilella@arnet.com.ar Como
MICRÓFONOS. Conceptos básicos
 MICRÓFONOS Conceptos básicos Un micrófono es un dispositivo capaz de convertir la energía acústica en energía eléctrica. El valor de la tensión de la energía eléctrica es proporcional a la presión ejercida
MICRÓFONOS Conceptos básicos Un micrófono es un dispositivo capaz de convertir la energía acústica en energía eléctrica. El valor de la tensión de la energía eléctrica es proporcional a la presión ejercida
Unidad Orientativa (Electrónica) Amplificadores Operacionales
 Amplificadores Operacionales") Unidad Orientativa (Electrónica) 1 Amplificadores Operacionales Índice Temático 2 1. Que son los amplificadores operacionales? 2. Conociendo a los Amp. Op. 3. Parámetros Principales. 4. Circuitos Básicos
Unidad Orientativa (Electrónica) 1 Amplificadores Operacionales Índice Temático 2 1. Que son los amplificadores operacionales? 2. Conociendo a los Amp. Op. 3. Parámetros Principales. 4. Circuitos Básicos
UNIVERSIDAD DE SAN CARLOS DE GUATEMALA FACULTAD DE INGENIERIA ESCUELA DE MECANICA ELECTRICA LABORATORIO DE ELECTRONICA PENSUM COMUNICACIONES 3
 UNIVERSIDAD DE SAN CARLOS DE GUATEMALA FACULTAD DE INGENIERIA ESCUELA DE MECANICA ELECTRICA LABORATORIO DE ELECTRONICA PENSUM COMUNICACIONES 3 ~ 1 ~ ÍNDICE Introducción...página 3 Prácticas LabVolt...página
UNIVERSIDAD DE SAN CARLOS DE GUATEMALA FACULTAD DE INGENIERIA ESCUELA DE MECANICA ELECTRICA LABORATORIO DE ELECTRONICA PENSUM COMUNICACIONES 3 ~ 1 ~ ÍNDICE Introducción...página 3 Prácticas LabVolt...página
Capítulo I. Convertidores de CA-CD y CD-CA
 Capítulo I. Convertidores de CA-CD y CD-CA 1.1 Convertidor CA-CD Un convertidor de corriente alterna a corriente directa parte de un rectificador de onda completa. Su carga puede ser puramente resistiva,
Capítulo I. Convertidores de CA-CD y CD-CA 1.1 Convertidor CA-CD Un convertidor de corriente alterna a corriente directa parte de un rectificador de onda completa. Su carga puede ser puramente resistiva,
GUÍA PARA LA FORMULACIÓN PROYECTOS
 GUÍA PARA LA FORMULACIÓN PROYECTOS Un PROYECTO es un PLAN DE TRABAJO; un conjunto ordenado de actividades con el fin de satisfacer necesidades o resolver problemas. Por lo general, cualquier tipo de proyecto,
GUÍA PARA LA FORMULACIÓN PROYECTOS Un PROYECTO es un PLAN DE TRABAJO; un conjunto ordenado de actividades con el fin de satisfacer necesidades o resolver problemas. Por lo general, cualquier tipo de proyecto,
6. Gestión de proyectos
 6. Gestión de proyectos Versión estudiante Introducción 1. El proceso de gestión de proyectos 2. Gestión del riesgo "La gestión de proyectos se basa en establecer objetivos claros, gestionar el tiempo,
6. Gestión de proyectos Versión estudiante Introducción 1. El proceso de gestión de proyectos 2. Gestión del riesgo "La gestión de proyectos se basa en establecer objetivos claros, gestionar el tiempo,
PRC-DTI-006 Administración de Roles de los Sistemas de Información de la DTI Procedimiento Dirección de TI - COSEVI
 PRC-DTI-006 Administración de Roles de los Sistemas de Información de la DTI Procedimiento Dirección de TI - COSEVI Versión: 1.0 Fecha de la versión: Febrero del 2012 Creado por: PwC Costa Rica Aprobado
PRC-DTI-006 Administración de Roles de los Sistemas de Información de la DTI Procedimiento Dirección de TI - COSEVI Versión: 1.0 Fecha de la versión: Febrero del 2012 Creado por: PwC Costa Rica Aprobado
GUÍA TÉCNICA PARA LA DEFINICIÓN DE COMPROMISOS DE CALIDAD Y SUS INDICADORES
 GUÍA TÉCNICA PARA LA DEFINICIÓN DE COMPROMISOS DE CALIDAD Y SUS INDICADORES Tema: Cartas de Servicios Primera versión: 2008 Datos de contacto: Evaluación y Calidad. Gobierno de Navarra. evaluacionycalidad@navarra.es
GUÍA TÉCNICA PARA LA DEFINICIÓN DE COMPROMISOS DE CALIDAD Y SUS INDICADORES Tema: Cartas de Servicios Primera versión: 2008 Datos de contacto: Evaluación y Calidad. Gobierno de Navarra. evaluacionycalidad@navarra.es
Circuitos RLC resonantes acoplados
 Pág. 1 Circuitos RLC resonantes acoplados Cano, Ramiro Díaz, Federico Trebisacce, Carlos cramirocano@.com.ar Facil7@hotmail.com trevicjt@hotmail.com Universidad Favaloro, Facultad de Ingeniería Bs. As.
Pág. 1 Circuitos RLC resonantes acoplados Cano, Ramiro Díaz, Federico Trebisacce, Carlos cramirocano@.com.ar Facil7@hotmail.com trevicjt@hotmail.com Universidad Favaloro, Facultad de Ingeniería Bs. As.
Prensas troqueladoras mecánicas actuadas mediante un servo motor. Por Dennis Boerger, Gerente de Producto: AIDA-America Corporation
 Prensas troqueladoras mecánicas actuadas mediante un servo motor. Por Dennis Boerger, Gerente de Producto: AIDA-America Corporation Por muchos años, los usuarios de prensas mecánicas han tomado como un
Prensas troqueladoras mecánicas actuadas mediante un servo motor. Por Dennis Boerger, Gerente de Producto: AIDA-America Corporation Por muchos años, los usuarios de prensas mecánicas han tomado como un
MAXWELL ROBOT SEGUIDOR DE LINEA
 MAXWELL ROBOT SEGUIDOR DE LINEA Carlos Mauricio Márquez Lozano Universidad Pontificia Bolivariana Seccional Bucaramanga Kilómetro 7 vía a Piedecuesta K_malquez@hotmail.com Resumen: MAXWELL, es un seguidor
MAXWELL ROBOT SEGUIDOR DE LINEA Carlos Mauricio Márquez Lozano Universidad Pontificia Bolivariana Seccional Bucaramanga Kilómetro 7 vía a Piedecuesta K_malquez@hotmail.com Resumen: MAXWELL, es un seguidor
1) ETAPA DE POTENCIA.
 ETAPA DE POTENCIA.") 1) ETAPA DE POTENCIA. Cuando es necesario controlar el sentido de giro de un motor de corriente continua de baja potencia, se suelen utilizar transistores de potencia en configuración Puente en H, tal
1) ETAPA DE POTENCIA. Cuando es necesario controlar el sentido de giro de un motor de corriente continua de baja potencia, se suelen utilizar transistores de potencia en configuración Puente en H, tal
Cualquier número de cualquier base se puede representar mediante la siguiente ecuación polinómica:
 SISTEMAS DE NUMERACIÓN Los números se pueden representar en distintos sistemas de numeración que se diferencian entre si por su base. Así el sistema de numeración decimal es de base 10, el binario de base
SISTEMAS DE NUMERACIÓN Los números se pueden representar en distintos sistemas de numeración que se diferencian entre si por su base. Así el sistema de numeración decimal es de base 10, el binario de base
Capítulo 1. Introducción
 Capítulo 1 Introducción 1.1 Antecedentes La producción musical, en su mayoría, se ha valido de distintos tipos de software computacional para realizar la edición de composiciones musicales. De toda la
Capítulo 1 Introducción 1.1 Antecedentes La producción musical, en su mayoría, se ha valido de distintos tipos de software computacional para realizar la edición de composiciones musicales. De toda la
CAPITULO 4 IMPLEMENTACIÓN Y PRUEBAS EXPERIMENTALES. En este capítulo se mostrarán los resultados de la simulación del Corrector de Factor
 CAPITULO 4 IMPLEMENTACIÓN Y PRUEBAS EXPERIMENTALES 4.1 INTRODUCCIÓN En este capítulo se mostrarán los resultados de la simulación del Corrector de Factor de Potencia, la cual fue realizada con el software
CAPITULO 4 IMPLEMENTACIÓN Y PRUEBAS EXPERIMENTALES 4.1 INTRODUCCIÓN En este capítulo se mostrarán los resultados de la simulación del Corrector de Factor de Potencia, la cual fue realizada con el software
JUEGO DE CARRERA DE AUTOS EN LCD
 JUEGO DE CARRERA DE AUTOS EN LCD Andrés Bastidas; Nathali Gordón; Verónica Grefa; Mónica Mejía; Juan Carlos Obregón Control con Microprocesadores, Nelson Sotomayor, MSc. 1 INTRODUCCIÓN El objetivo del
JUEGO DE CARRERA DE AUTOS EN LCD Andrés Bastidas; Nathali Gordón; Verónica Grefa; Mónica Mejía; Juan Carlos Obregón Control con Microprocesadores, Nelson Sotomayor, MSc. 1 INTRODUCCIÓN El objetivo del
Práctica 1. Compuertas Lógicas
 USLP FI Laboratorio de Sistemas Digitales Práctica 1 1.1 Objetivo Práctica 1 Compuertas Lógicas Conocer el funcionamiento, conexión y utilización de las compuertas lógicas ND, OR, NOT, NND, NOR, E -OR
USLP FI Laboratorio de Sistemas Digitales Práctica 1 1.1 Objetivo Práctica 1 Compuertas Lógicas Conocer el funcionamiento, conexión y utilización de las compuertas lógicas ND, OR, NOT, NND, NOR, E -OR
Setefilla López Alvarez Orientadora CEEE Aben-Basso
 Recursos y estrategias para facilitar el acceso al ordenador: Recursos del Sistema, ratones faciales, sistemas de barrido, programas de autoayuda del Proyecto Fressa.- Setefilla López Alvarez Orientadora
Recursos y estrategias para facilitar el acceso al ordenador: Recursos del Sistema, ratones faciales, sistemas de barrido, programas de autoayuda del Proyecto Fressa.- Setefilla López Alvarez Orientadora
Neumática Ángel Mao Goyanes, 24 de Noviembre de 2013
 Neumática Ángel Mao Goyanes, 24 de Noviembre de 2013 Índice 1. Definición 2. Ventajas e inconvenientes 3. Circuito neumático a. Compresor b. Depósito c. Unidad de mantenimiento d. Elementos de distribución
Neumática Ángel Mao Goyanes, 24 de Noviembre de 2013 Índice 1. Definición 2. Ventajas e inconvenientes 3. Circuito neumático a. Compresor b. Depósito c. Unidad de mantenimiento d. Elementos de distribución
TEMA 2: CIRCUITOS ELÉCTRICOS: CIRCUITOS SERIE, PARALELO Y MIXTOS. CÁLCULO DE MAGNITUDES EN UN CIRCUITO.
 CPI Antonio Orza Couto 3º ESO TECNOLOGÍA TEMA-2 ELECTRICIDAD: CIRCUITOS TEMA 2: CIRCUITOS ELÉCTRICOS: CIRCUITOS SERIE, PARALELO Y MIXTOS. CÁLCULO DE MAGNITUDES EN UN CIRCUITO. 1. CIRCUITO ELÉCTRICO Definición
CPI Antonio Orza Couto 3º ESO TECNOLOGÍA TEMA-2 ELECTRICIDAD: CIRCUITOS TEMA 2: CIRCUITOS ELÉCTRICOS: CIRCUITOS SERIE, PARALELO Y MIXTOS. CÁLCULO DE MAGNITUDES EN UN CIRCUITO. 1. CIRCUITO ELÉCTRICO Definición
CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN. Figura 4.1.Caja Negra. Generar. Sistema de control. Acumular. Figura 4.2. Diagrama de funciones
 CAPÍTULO 4 37 CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN Para diseñar el SGE, lo primero que se necesita es plantear diferentes formas en las que se pueda resolver el problema para finalmente decidir
CAPÍTULO 4 37 CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN Para diseñar el SGE, lo primero que se necesita es plantear diferentes formas en las que se pueda resolver el problema para finalmente decidir
1. VIRTUALIZACION DEL PROCESO REAL.
 CAPITULO IV DISEÑO 86 En este capítulo se muestra el diseño realizado para el desarrollo del CD Interactivo del Museo e Historia Militar de la Fuerza Armada de El Salvador, se ilustra claramente el proceso
CAPITULO IV DISEÑO 86 En este capítulo se muestra el diseño realizado para el desarrollo del CD Interactivo del Museo e Historia Militar de la Fuerza Armada de El Salvador, se ilustra claramente el proceso
11 knúmero de publicación: 2 141 353. 51 kint. Cl. 6 : F16H 37/04. Número de solicitud europea: 95919718.7 86 kfecha de presentación : 12.05.
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 141 33 1 kint. Cl. 6 : F16H 37/04 F16H 7/02 B2J 18/00 B2J 9/ H02K 7/116 12 k TRADUCCION DE PATENTE EUROPEA T3 86 k Número
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 141 33 1 kint. Cl. 6 : F16H 37/04 F16H 7/02 B2J 18/00 B2J 9/ H02K 7/116 12 k TRADUCCION DE PATENTE EUROPEA T3 86 k Número
ÍNDICE DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ
 ELECTRÓNICA DIGITAL DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ IES TRINIDAD ARROYO DPTO. DE ELECTRÓNICA ÍNDICE ÍNDICE... 1 1. LIMITACIONES DE LOS CONTADORES ASÍNCRONOS... 2 2. CONTADORES SÍNCRONOS...
ELECTRÓNICA DIGITAL DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ IES TRINIDAD ARROYO DPTO. DE ELECTRÓNICA ÍNDICE ÍNDICE... 1 1. LIMITACIONES DE LOS CONTADORES ASÍNCRONOS... 2 2. CONTADORES SÍNCRONOS...
Instrumentación con Microcontroladores. Ing. Rodrigo Alejandro Gutiérrez Arenas 22/03/12 al 29/03/12
 Instrumentación con Microcontroladores Ing. Rodrigo Alejandro Gutiérrez Arenas 22/03/12 al 29/03/12 Contenido Problemas relativos a los proyectos Introducción y motivación para utilizar a Arduino Entrada
Instrumentación con Microcontroladores Ing. Rodrigo Alejandro Gutiérrez Arenas 22/03/12 al 29/03/12 Contenido Problemas relativos a los proyectos Introducción y motivación para utilizar a Arduino Entrada
Sistemas de numeración y aritmética binaria
 Sistemas de numeración y aritmética binaria Héctor Antonio Villa Martínez Programa de Ciencias de la Computación Universidad de Sonora Este reporte consta de tres secciones. Primero, la Sección 1 presenta
Sistemas de numeración y aritmética binaria Héctor Antonio Villa Martínez Programa de Ciencias de la Computación Universidad de Sonora Este reporte consta de tres secciones. Primero, la Sección 1 presenta
GeoAVL Especificaciones Técnicas
 GeoAVL Generalidades El sistema de gestión de información vehicular en tiempo real GeoAVL, incluye la infraestructura y servicios necesarios para su explotación, a saber: La infraestructura de Hardware
GeoAVL Generalidades El sistema de gestión de información vehicular en tiempo real GeoAVL, incluye la infraestructura y servicios necesarios para su explotación, a saber: La infraestructura de Hardware
2.0 QUÉ ES NECESARIO PARA EMPEZAR A OPERAR CON FUTUROS?
 27 2.0 QUÉ ES NECESARIO PARA EMPEZAR A OPERAR CON FUTUROS? 2.1 Cómo elegir bróker y abrir una cuenta? Ya vimos anteriormente que un bróker es un intermediario entre el especulador y el mercado. Hay muchos
27 2.0 QUÉ ES NECESARIO PARA EMPEZAR A OPERAR CON FUTUROS? 2.1 Cómo elegir bróker y abrir una cuenta? Ya vimos anteriormente que un bróker es un intermediario entre el especulador y el mercado. Hay muchos
INTrodUCCIÓN El museo Como recurso EdUCATIvo
 JUSTIFICACIÓN 2012 Introducción La era de la cultura digital y de la sociedad de la información ha generado gran cantidad de cambios para la sociedad en general y para el caso que nos ocupa la educación
JUSTIFICACIÓN 2012 Introducción La era de la cultura digital y de la sociedad de la información ha generado gran cantidad de cambios para la sociedad en general y para el caso que nos ocupa la educación
Tema : ELECTRÓNICA DIGITAL
 (La Herradura Granada) Departamento de TECNOLOGÍA Tema : ELECTRÓNICA DIGITAL.- Introducción. 2.- Representación de operadores lógicos. 3.- Álgebra de Boole. 3..- Operadores básicos. 3.2.- Función lógica
(La Herradura Granada) Departamento de TECNOLOGÍA Tema : ELECTRÓNICA DIGITAL.- Introducción. 2.- Representación de operadores lógicos. 3.- Álgebra de Boole. 3..- Operadores básicos. 3.2.- Función lógica
Control de motor de pasos Para Pic12C508
 Control de motor de pasos Para Pic12C508 Entre los innumerables tipos de motores, los de pasos son quizás los consentidos de los aficionados y profesionales de la electrónica y también de la robótica.
Control de motor de pasos Para Pic12C508 Entre los innumerables tipos de motores, los de pasos son quizás los consentidos de los aficionados y profesionales de la electrónica y también de la robótica.
REFLEXIONES EN TORNO A LA PROBLEMÁTICA DE LAS INSTALACIONES DEL SECTOR DE CLIMATIZACIÓN
 REFLEXIONES EN TORNO A LA PROBLEMÁTICA DE LAS INSTALACIONES DEL SECTOR DE CLIMATIZACIÓN El WORSHOP organizado por AEDICI, AFEC, ASHRAE, ASIMCCAF y ATECYR, ha tenido su continuación el pasado 8 de abril,
REFLEXIONES EN TORNO A LA PROBLEMÁTICA DE LAS INSTALACIONES DEL SECTOR DE CLIMATIZACIÓN El WORSHOP organizado por AEDICI, AFEC, ASHRAE, ASIMCCAF y ATECYR, ha tenido su continuación el pasado 8 de abril,
Diapositiva 1. Por supuesto, también se puede hacer lo contrario. Un demultiplexor envía una señal a una de muchas líneas.
 Diapositiva 1 Por supuesto, también se puede hacer lo contrario. Un demultiplexor envía una señal a una de muchas líneas. Diapositiva 2 Diapositiva 3 Diapositiva 4 En los circuitos digitales la información
Diapositiva 1 Por supuesto, también se puede hacer lo contrario. Un demultiplexor envía una señal a una de muchas líneas. Diapositiva 2 Diapositiva 3 Diapositiva 4 En los circuitos digitales la información
SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética.
 SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética. A diferencia de los sistemas monofásicos de C.A., estudiados hasta ahora, que utilizan dos conductores
SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética. A diferencia de los sistemas monofásicos de C.A., estudiados hasta ahora, que utilizan dos conductores
ESTRATEGIAS PARA EL CÁLCULO MENTAL
 ESTRATEGIAS PARA EL CÁLCULO MENTAL AUTORÍA MARÍA JOSEFA GIL PARRA TEMÁTICA CÁLCULO MENTAL ETAPA PRIMARIA Resumen El área de matemáticas es la asignatura que presenta mayor dificultad. Es la más abstracta
ESTRATEGIAS PARA EL CÁLCULO MENTAL AUTORÍA MARÍA JOSEFA GIL PARRA TEMÁTICA CÁLCULO MENTAL ETAPA PRIMARIA Resumen El área de matemáticas es la asignatura que presenta mayor dificultad. Es la más abstracta
En la 3ª entrega de este trabajo nos centraremos en la relación entre magnitudes eléctricas, hecho que explica la famosa Ley de Ohm.
 3º parte En la 3ª entrega de este trabajo nos centraremos en la relación entre magnitudes eléctricas, hecho que explica la famosa Ley de Ohm. ELEMENTOS DEL CIRCUITO ELÉCTRICO Para poder relacionar las
3º parte En la 3ª entrega de este trabajo nos centraremos en la relación entre magnitudes eléctricas, hecho que explica la famosa Ley de Ohm. ELEMENTOS DEL CIRCUITO ELÉCTRICO Para poder relacionar las
TEMA 2. CIRCUITOS ELÉCTRICOS.
 TEMA 2. CIRCUITOS ELÉCTRICOS. 1. INTRODUCCIÓN. A lo largo del presente tema vamos a estudiar los circuitos eléctricos, para lo cual es necesario recordar una serie de conceptos previos tales como la estructura
TEMA 2. CIRCUITOS ELÉCTRICOS. 1. INTRODUCCIÓN. A lo largo del presente tema vamos a estudiar los circuitos eléctricos, para lo cual es necesario recordar una serie de conceptos previos tales como la estructura
Introducción. 3.1 Modelo del Transistor
 3 Celdas Básicas Introducción Muchas de las celdas utilizadas a lo largo de este trabajo están conformadas por circuitos más pequeños que presentan un comportamiento particular. En capítulos posteriores
3 Celdas Básicas Introducción Muchas de las celdas utilizadas a lo largo de este trabajo están conformadas por circuitos más pequeños que presentan un comportamiento particular. En capítulos posteriores
www.fundibeq.org Además se recomienda su uso como herramienta de trabajo dentro de las actividades habituales de gestión.
 HOJAS DE COMPROBACIOÓN Y HOJAS DE RECOGIDA DE DATOS 1.- INTRODUCCIÓN En este documento se describe el proceso de obtención de información a partir de la recogida y análisis de datos, desde el establecimiento
HOJAS DE COMPROBACIOÓN Y HOJAS DE RECOGIDA DE DATOS 1.- INTRODUCCIÓN En este documento se describe el proceso de obtención de información a partir de la recogida y análisis de datos, desde el establecimiento
CONTROL DE VELOCIDAD PARA UN MOTOR SRM UTILIZANDO SISTEMAS DE SIMULACIÓN INTERACTIVA Y PROTOTIPADO RÁPIDO
 CONTROL DE VELOCIDAD PARA UN MOTOR SRM UTILIZANDO SISTEMAS DE SIMULACIÓN INTERACTIVA Y PROTOTIPADO RÁPIDO Juan Antonio Espinar Romero Ingeniería técnica industrial especialidad en electricidad EPSEVG,
CONTROL DE VELOCIDAD PARA UN MOTOR SRM UTILIZANDO SISTEMAS DE SIMULACIÓN INTERACTIVA Y PROTOTIPADO RÁPIDO Juan Antonio Espinar Romero Ingeniería técnica industrial especialidad en electricidad EPSEVG,
PROGRAMA ARDUINO 2.0
 PROGRAMA ARDUINO 2.0 Programa Arduino 2.0 El uso de la robótica se está convirtiendo en la base de la industria contemporánea, y esto hace que sea cada vez más importante conocerla y saber cuál es su alcance.
PROGRAMA ARDUINO 2.0 Programa Arduino 2.0 El uso de la robótica se está convirtiendo en la base de la industria contemporánea, y esto hace que sea cada vez más importante conocerla y saber cuál es su alcance.
FARMALL U PRO LA COMBINACIÓN EFICIENTE PARA LOS QUE BUSCAN LA COMBINACIÓN PERFECTA ENTRE MOTOR, TRANSMISIÓN Y CONTROL DE TRABAJO.
 FARMALL U PRO LA COMBINACIÓN EFICIENTE PARA LOS QUE BUSCAN LA COMBINACIÓN PERFECTA ENTRE MOTOR, TRANSMISIÓN Y CONTROL DE TRABAJO. MOTOR - Ahorro de combustible TRANsMIsIÓN - Aplicación optimizada CONTROL
FARMALL U PRO LA COMBINACIÓN EFICIENTE PARA LOS QUE BUSCAN LA COMBINACIÓN PERFECTA ENTRE MOTOR, TRANSMISIÓN Y CONTROL DE TRABAJO. MOTOR - Ahorro de combustible TRANsMIsIÓN - Aplicación optimizada CONTROL
Transformación de calor en trabajo: el motor de Stirling
 Práctica Nº 1 ransformación de calor en trabajo: el motor de Stirling 1. Conceptos implicados Primera y segunda ley de la termodinámica, calor, trabajo, máquinas térmicas, transformación de la energía.
Práctica Nº 1 ransformación de calor en trabajo: el motor de Stirling 1. Conceptos implicados Primera y segunda ley de la termodinámica, calor, trabajo, máquinas térmicas, transformación de la energía.
La presente tesis pretende que los estudiantes observen la teoría de las acciones de control
 CAPÍTULO V. CONCLUSIONES. La presente tesis pretende que los estudiantes observen la teoría de las acciones de control de forma virtual al mismo tiempo analicen físicamente los sistemas electrónicos cuando
CAPÍTULO V. CONCLUSIONES. La presente tesis pretende que los estudiantes observen la teoría de las acciones de control de forma virtual al mismo tiempo analicen físicamente los sistemas electrónicos cuando
CAPÍTULO VI. Propuesta de Alfabetización Digital para la Escuela Normal de Educación Física (ENEF)
") CAPÍTULO VI. Propuesta de Alfabetización Digital para la Escuela Normal de Educación Física (ENEF) 107 CAPÍTULO VI. Propuesta de Alfabetización Digital para la Escuela Normal de Educación Física (ENEF)
CAPÍTULO VI. Propuesta de Alfabetización Digital para la Escuela Normal de Educación Física (ENEF) 107 CAPÍTULO VI. Propuesta de Alfabetización Digital para la Escuela Normal de Educación Física (ENEF)
LABORATORIO REMOTO DE MÁQUINAS DE CORRIENTE ALTERNA
 LABORATORIO REMOTO DE MÁQUINAS DE CORRIENTE ALTERNA Calidad y Materiales educativos y Herramientas Tecnológicas en Educación a Distancia Chacón Rafael, Hernández Edwin rafa.anto@gmail.com, edwingh@hotmail.com
LABORATORIO REMOTO DE MÁQUINAS DE CORRIENTE ALTERNA Calidad y Materiales educativos y Herramientas Tecnológicas en Educación a Distancia Chacón Rafael, Hernández Edwin rafa.anto@gmail.com, edwingh@hotmail.com
Diferencias entre nivel 2 y nivel 3 y una estrategia de implantación
 CMMI DEV Diferencias entre nivel 2 y nivel 3 y una estrategia de implantación Cecilia Rigoni Gerente de Caelum, Information & Quality Technologies. Vocal del Comité CSTIC de la AEC El modelo CMMI DEV,
CMMI DEV Diferencias entre nivel 2 y nivel 3 y una estrategia de implantación Cecilia Rigoni Gerente de Caelum, Information & Quality Technologies. Vocal del Comité CSTIC de la AEC El modelo CMMI DEV,
Universidad Nacional Autónoma de México E N E P A R A G O N. Laboratorio de. Control Digital. Motor de Paso a Paso. Motores Paso a Paso
 Universidad Nacional Autónoma de México E N E P A R A G O N Laboratorio de Control Digital Motor de Paso a Paso Motores Paso a Paso Un motor paso a paso es un tipo especial de motor sincrónico diseñado
Universidad Nacional Autónoma de México E N E P A R A G O N Laboratorio de Control Digital Motor de Paso a Paso Motores Paso a Paso Un motor paso a paso es un tipo especial de motor sincrónico diseñado
Como utilizar un servo motor con Arduino.
 Como utilizar un servo motor con Arduino. Revisión Diciembre 2009 Desarrollada por: Christopher Thompson cthompson@olimex.cl Revisada por: Paul Aguayo paguayo@olimex.cl 2 1 Introducción Arduino es una
Como utilizar un servo motor con Arduino. Revisión Diciembre 2009 Desarrollada por: Christopher Thompson cthompson@olimex.cl Revisada por: Paul Aguayo paguayo@olimex.cl 2 1 Introducción Arduino es una
Sistema Control. Administrativo Contable 2012.
 Sistema Control Módulo: Administrativo Contable. 1 Introducción: El sistema desarrollado por Grupo Boot Record S.R.L., le permite controlar todas sus operaciones contables, financieras y administrativas
Sistema Control Módulo: Administrativo Contable. 1 Introducción: El sistema desarrollado por Grupo Boot Record S.R.L., le permite controlar todas sus operaciones contables, financieras y administrativas
Instalaciones Aisladas de la Red
 Energía Solar Fotovoltaica El método más sencillo para la captación solar es el de la conversión fotovoltaica, que consiste en convertir la energía solar en energía eléctrica por medio de células solares.
Energía Solar Fotovoltaica El método más sencillo para la captación solar es el de la conversión fotovoltaica, que consiste en convertir la energía solar en energía eléctrica por medio de células solares.
Enseñanza-aprendizaje constructivista a través de la Robótica Educativa TEMA 4. La Ruta del autobús
 Enseñanza-aprendizaje constructivista a través de la Robótica Educativa Guía Didáctica EL ROBOT COMO OBJETO DE APRENDIZAJE TEMA 4 La Ruta del autobús Curso promovido por: El proyecto Europeo Comenious
Enseñanza-aprendizaje constructivista a través de la Robótica Educativa Guía Didáctica EL ROBOT COMO OBJETO DE APRENDIZAJE TEMA 4 La Ruta del autobús Curso promovido por: El proyecto Europeo Comenious
Matemáticas para la Computación
 Matemáticas para la Computación José Alfredo Jiménez Murillo 2da Edición Inicio Índice Capítulo 1. Sistemas numéricos. Capítulo 2. Métodos de conteo. Capítulo 3. Conjuntos. Capítulo 4. Lógica Matemática.
Matemáticas para la Computación José Alfredo Jiménez Murillo 2da Edición Inicio Índice Capítulo 1. Sistemas numéricos. Capítulo 2. Métodos de conteo. Capítulo 3. Conjuntos. Capítulo 4. Lógica Matemática.
Curso sobre Microcontroladores Familia HC9S08 de Freescale
 Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
CÁLCULO SECCIÓN CABLEADO DE ALIMENTACIÓN
 CÁLCULO SECCIÓN CABLEADO DE ALIMENTACIÓN V 1.0 SEPTIEMBRE 2005 Corriente máxima en el cable (A) CÁLCULO DE LA SECCIÓN MÍNIMA DEL CABLEADO DE ALIMENTACIÓN Longitud del cable en metros 0 1.2 1.2 2.1 2.1
CÁLCULO SECCIÓN CABLEADO DE ALIMENTACIÓN V 1.0 SEPTIEMBRE 2005 Corriente máxima en el cable (A) CÁLCULO DE LA SECCIÓN MÍNIMA DEL CABLEADO DE ALIMENTACIÓN Longitud del cable en metros 0 1.2 1.2 2.1 2.1
SESION DIRIGIDA: INICIACIÓN AL BEISBOL
 DEPORTES COLECTIVOS SESION DIRIGIDA: INICIACIÓN AL BEISBOL 2º TAFAD DIEGO CALVO Y DIEGO MARTIN 2015 INSTITUTO VICTORIO MACHO Propuesta de actividades para la familiarización de ALUMNOS DE 2º DE TAFAD del
DEPORTES COLECTIVOS SESION DIRIGIDA: INICIACIÓN AL BEISBOL 2º TAFAD DIEGO CALVO Y DIEGO MARTIN 2015 INSTITUTO VICTORIO MACHO Propuesta de actividades para la familiarización de ALUMNOS DE 2º DE TAFAD del
Sistemas de numeración
 Sistemas de numeración Sistema binario 0,1 Sistema octal 0, 1, 2, 3, 4, 5, 6, 7 Sistema decimal 0, 1, 2, 3, 4, 5, 6, 7, 8, 9 Sistema hexadecimal 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, A, B, C, D, E, F Una señal
Sistemas de numeración Sistema binario 0,1 Sistema octal 0, 1, 2, 3, 4, 5, 6, 7 Sistema decimal 0, 1, 2, 3, 4, 5, 6, 7, 8, 9 Sistema hexadecimal 0, 1, 2, 3, 4, 5, 6, 7, 8, 9, A, B, C, D, E, F Una señal
Filtros pasa banda. Filtro pasa bajos. Filtro pasa medios Filtro pasa altos
 Filtros pasa banda 1 Un filtro pasa banda es un circuito electrónico que permite el paso de un determinado rango de frecuencias de una señal y atenúa el resto de frecuencias. Presentamos tres filtros pasa
Filtros pasa banda 1 Un filtro pasa banda es un circuito electrónico que permite el paso de un determinado rango de frecuencias de una señal y atenúa el resto de frecuencias. Presentamos tres filtros pasa
Lección 9: Polinomios
 LECCIÓN 9 c) (8 + ) j) [ 9.56 ( 9.56)] 8 q) (a x b) d) ( 5) 4 k) (6z) r) [k 0 (k 5 k )] e) (. 0.) l) (y z) s) (v u ) 4 f) ( 5) + ( 4) m) (c d) 7 t) (p + q) g) (0 x 0.) n) (g 7 g ) Lección 9: Polinomios
LECCIÓN 9 c) (8 + ) j) [ 9.56 ( 9.56)] 8 q) (a x b) d) ( 5) 4 k) (6z) r) [k 0 (k 5 k )] e) (. 0.) l) (y z) s) (v u ) 4 f) ( 5) + ( 4) m) (c d) 7 t) (p + q) g) (0 x 0.) n) (g 7 g ) Lección 9: Polinomios
Robot seguidor de líneas
 1. Introducción Robot seguidor de líneas Como primer proyecto, el Club de Robótica del Departamento de Electrotecnia de la FI UNLP propone el desarrollo de un robot seguidor de línea blanca. El tamaño
1. Introducción Robot seguidor de líneas Como primer proyecto, el Club de Robótica del Departamento de Electrotecnia de la FI UNLP propone el desarrollo de un robot seguidor de línea blanca. El tamaño
Curso de Iniciación a la Micro- Robótica. SigBot ACM Capítulo de estudiantes
 Curso de Iniciación a la Micro- Robótica SigBot ACM Capítulo de estudiantes Micro-robótica? La micro-robótica es la parte de la robótica que crea los robots más económicos y de fácil construcción para
Curso de Iniciación a la Micro- Robótica SigBot ACM Capítulo de estudiantes Micro-robótica? La micro-robótica es la parte de la robótica que crea los robots más económicos y de fácil construcción para
LINEAMIENTOS PARA LA ELABORACIÓN DEL PROGRAMA ANUAL DE TRABAJO
 LINEAMIENTOS PARA LA ELABORACIÓN DEL PROGRAMA ANUAL DE TRABAJO Junio 2012 INDICE 1. INTRODUCCIÓN 2. ANTECEDENTES 3. SITUACIÓN ACTUAL A) Daños a la Salud Principales características sociodemográficas Principales
LINEAMIENTOS PARA LA ELABORACIÓN DEL PROGRAMA ANUAL DE TRABAJO Junio 2012 INDICE 1. INTRODUCCIÓN 2. ANTECEDENTES 3. SITUACIÓN ACTUAL A) Daños a la Salud Principales características sociodemográficas Principales
2.- PLATAFORMA ARDUINO (HARDWARE)
") 2.- PLATAFORMA ARDUINO (HARDWARE) La plataforma Arduino es una plataforma open-hardware basada en una sencilla placa con entradas y salidas (E/S), analógicas y digitales. El elemento principal el microcontrolador
2.- PLATAFORMA ARDUINO (HARDWARE) La plataforma Arduino es una plataforma open-hardware basada en una sencilla placa con entradas y salidas (E/S), analógicas y digitales. El elemento principal el microcontrolador
MEDICIONES ELECTRICAS I
 Año:... Alumno:... Comisión:... MEDICIONES ELECTRICAS I Trabajo Práctico N 4 Tema: FACTOR DE FORMA Y DE LECTURA. RESPUESTA EN FRECUENCIA DE INSTRUMENTOS. Tipos de instrumentos Según el principio en que
Año:... Alumno:... Comisión:... MEDICIONES ELECTRICAS I Trabajo Práctico N 4 Tema: FACTOR DE FORMA Y DE LECTURA. RESPUESTA EN FRECUENCIA DE INSTRUMENTOS. Tipos de instrumentos Según el principio en que
DISEÑO DEL SOFTWARE TRAFFIC ANALYZER. Analyzer. En este capítulo se reporta el desarrollo que se llevó a cabo para realizar el software
 3 Diseño del Software Traffic Analyzer En este capítulo se reporta el desarrollo que se llevó a cabo para realizar el software que analiza el tráfico en redes de telefonía y computadoras, denominado Traffic
3 Diseño del Software Traffic Analyzer En este capítulo se reporta el desarrollo que se llevó a cabo para realizar el software que analiza el tráfico en redes de telefonía y computadoras, denominado Traffic
Control de la temperatura ambiente en un invernadero tipo venlo, mediante el uso del microcontrolador 8031
 Control de la temperatura ambiente en un invernadero tipo venlo, mediante el uso del microcontrolador 8031 GENARO CALDERÓN RODRÍGUEZ HÉCTOR HORACIO OCHOA NARANJO FACULTAD DE INGENIERÍA MECANICA Y ELÉCTRICA
Control de la temperatura ambiente en un invernadero tipo venlo, mediante el uso del microcontrolador 8031 GENARO CALDERÓN RODRÍGUEZ HÉCTOR HORACIO OCHOA NARANJO FACULTAD DE INGENIERÍA MECANICA Y ELÉCTRICA
INGENIERIA EN MICROCONTROLADORES. Protocolo RS-485. Introducción
 INGENIERIA EN MICROCONTROLADORES Protocolo RS-485 Introducción P R O T O C O L O R S - 4 8 5 www.i-micro.com Ingeniería en Microcontroladores Teléfono 044 55 11 29 55 05 E-mail: cursos@i-micro.com elp@i-micro.com
INGENIERIA EN MICROCONTROLADORES Protocolo RS-485 Introducción P R O T O C O L O R S - 4 8 5 www.i-micro.com Ingeniería en Microcontroladores Teléfono 044 55 11 29 55 05 E-mail: cursos@i-micro.com elp@i-micro.com