51 Int. CI.: B25J 9/16 ( ) TRADUCCIÓN DE PATENTE EUROPEA
|
|
|
- Aarón Santos Medina
- hace 8 años
- Vistas:
Transcripción
1 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: Int. CI.: B2J 9/16 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Fecha de presentación y número de la solicitud europea: E (6) 97 Fecha y número de publicación de la concesión europea: EP Título: Método para encontrar trayectorias articuladas factibles para un robot n-dof con un proceso invariante de giro (n > ) Prioridad: US P EP Fecha de publicación y mención en BOPI de la traducción de la patente: Titular/es: SYDDANSK UNIVERSITET (0.0%) Campusvej 2 Odense M, DK 72 Inventor/es: GORDON PETERSEN, HENRIK; CORTSEN, JENS y SOELVASON, DORTHE 74 Agente/Representante: VALLEJO LÓPEZ, Juan Pedro ES T3 Aviso: En el plazo de nueve meses a contar desde la fecha de publicación en el Boletín europeo de patentes, de la mención de concesión de la patente europea, cualquier persona podrá oponerse ante la Oficina Europea de Patentes a la patente concedida. La oposición deberá formularse por escrito y estar motivada; sólo se considerará como formulada una vez que se haya realizado el pago de la tasa de oposición (art del Convenio sobre concesión de Patentes Europeas).

2 DESCRIPCIÓN Método para encontrar trayectorias articuladas factibles para un robot n-dof con un proceso invariante de giro (n > ) Campo de la invención La presente invención se refiere a un método para determinar un curso del movimiento relativo entre un objeto y un robot para interactuar con el objeto. En particular, la invención se refiere a un método para encontrar unas trayectorias articuladas factibles para un robot n-dof con un proceso invariante de giro (n > ). El método usa la invariancia con respecto al giro alrededor del eje de herramienta para facilitar la planificación del movimiento y de ese modo maximizar el espacio de trabajo del robot. Antecedentes de la invención El documento WO0417A1 divulga la generación de instrucciones para un robot que está adaptado para procesar un objeto. De acuerdo con el método descrito en la solicitud, los parámetros de control se generan basándose en los datos del objeto, asociándose los parámetros de control con la orientación del dispositivo de procesamiento durante el procesamiento del objeto y generándose para una pluralidad de localizaciones en el objeto de manera que se asigna cada una de las localizaciones con al menos un parámetro de control. El documento WO92224A1 divulga un herramienta de máquina multi-eje controlada de forma numérica por ordenador (CNC), en la que una herramienta de corte es móvil en relación con una pieza de trabajo por medio de un número de juntas lineales y de giro bajo el control de una unidad de control programable. La máquina está programada con una pluralidad de ejes programables principales, llamados ejes hard, y con al menos un eje adicional programable sintetizado o eje soft que permite que la herramienta de corte se mueva de forma lineal en la dirección del eje soft sin necesitar una articulación específica para ese fin. El eje soft sintetizado es un eje redundante parcialmente, no-colineal que aumenta el número de grados de libertad programables a un número mayor que los grados de libertad de la máquina, es decir: el número de articulaciones no-colineales. El principio de los ejes soft sintetizados puede extenderse a las herramienta de máquina CNC que tienen cuatro o más ejes hard principales, por ejemplo, para producir una herramienta de máquina CNC articulada- que tiene la flexibilidad de una herramienta de máquina articulada-7 u -8 convencional. El documento US divulga un controlador de robot capaz de encontrar una trayectoria mal enseñada y evitar peligros involucrados en un movimiento real de un robot sin usar un sistema de simulación sin conexión. Se reproduce un programa de funcionamiento para confirmar la seguridad con el sistema de control del robot dispuesto de tal manera que se activa una función de simulación, se desactiva un movimiento real, y se activa el procesamiento de comparación. El documento US se refiere a una mejora en una estructura de brazo robótico que incluye al menos dos enlaces. Un movimiento llamado θ, se proporciona alrededor de un eje principal en la parte de extremo proximal del más proximal de los enlaces. Un movimiento llamado R procede radialmente desde el eje principal mediante el cual la parte de extremo distal del más distal de los enlaces puede moverse en una línea recta que se extiende radialmente. Se monta un efector de extremo de manera pivotante para girar en relación con la parte de extremo distal del enlace más distal alrededor de un eje efector de extremo que es paralelo al eje principal. La estructura se mejora añadiendo uno o más de entre un motor de orientación, un motor de balanceo y un motor de cabeceo para girar la muñeca del brazo alrededor de los ejes respectivos. Un conjunto de sensores detecta los movimientos R, θ, Z y de orientación, de balanceo y/o de cabeceo y crea y transmite señales electrónicas representativas de los mismos a un controlador de ordenador que monitoriza y controla los movimientos R, θ, Z y de orientación, de balanceo y/o de cabeceo. Debido a problemas de bloqueo asociados con un método de mirar hacia adelante, tales como los que se divulgan en el documento US 0/246062A1, en el que la trayectoria se encuentra de forma iterativa a partir de un extremo y solo la siguiente o se consideran las siguientes etapas de tiempo, es un objeto de la presente invención proporcionar un enfoque en el que la búsqueda se realiza de una manera más global; en lo sucesivo en el presente documento, denominada como una búsqueda de forma global en el tiempo. Sumario de la invención 60 6 De acuerdo con la presente invención, se proporciona un método, que permite una planificación de la trayectoria fuera de línea para la molienda con un robot industrial. La invención pretende ampliar el intervalo de funcionamiento de los robots de molienda conocidos. Esto se consigue con un nuevo componente de software. Un proceso invariante de giro necesita solo grados de libertad (DOF) de la herramienta que se especifica como cualquier giro alrededor del eje de herramienta que proporcionará el mismo resultado. Cuando se realiza el proceso con un robot industrial con 6 o más DOF, el robot tendrá, de esta manera, redundancia. Para robots de 6 DOF, en los que la articulación más exterior es giratoria, el eje de herramienta debe ser no coincidente con ese eje. Una 2

3 manera de dar una descripción completa de la redundancia es fijar la herramienta y girar la brida de herramienta del robot alrededor del eje de herramienta En el siguiente X (t) se denota la posición y la orientación de un sistema de coordenadas que describe la posición de la herramienta deseada y la orientación en el tiempo t. Cuando se especifica X (t), la redundancia debida a la invariancia de giro no se ha explotado todavía. La redundancia se explota mediante un parámetro q Tool (t) adicional que describe el giro de la brida de herramienta alrededor del eje de herramienta en el tiempo t. Para elegir X (t) y q Tool (t), la posición y la orientación de la brida de herramienta del robot se describen completamente y se define también el conjunto de las soluciones IK (X (t), q Tool (t)) cinemáticas inversas. Una trayectoria articulada factible proporciona una n-tupla q Robot (t) (configuración de la articulación) que contiene las posiciones de todas las articulaciones del robot como una función del tiempo. Con el fin de ser factible, q Robot (t) debe en un tiempo t arbitrario pertenecer a IK (X (t), q Tool) para algún ángulo q Tool. Además, q Robot (t) debe conducir al robot para no chocar con el entorno, la pieza de trabajo o el robot en sí mismo (auto-colisión). Por otra parte, los límites de las articulaciones, los límites de velocidad de las articulaciones y posiblemente los límites de aceleración de las articulaciones deben satisfacerse en cualquier momento. Los métodos existentes utilizan valores de q Tool (t) elegidos de forma manual. En su mayoría se fijan a un valor Q a lo largo de todo el período del proceso. La limitación resultante debido a un pequeño conjunto innecesario de soluciones IK (X (t), Q) cinemáticas inversas limita sustancialmente el espacio de trabajo del robot. Es la fuerza principal del método que busca la q Tool (t) adecuada y variable en el tiempo que puede proporcionar una IK (X (t), q Tool (t)) útil. En el tiempo t, se proporcionan por lo tanto el conjunto de todas las soluciones mediante la IK all (t) proporcionada como la unión de IK (X (t), q Tool) cuando q Tool se extiende de 0 a 360 grados. La presente invención se dirige a cualquier método que de forma global en el tiempo busque trayectorias q Robot (t) factibles usando IK all (t) como el conjunto de las posibles soluciones en el tiempo t. Con el fin de describir de forma global en el tiempo, se especifica por simplicidad el intervalo de tiempo de la trayectoria completa en t 1 t 2... t N-1 t N. Para un criterio O (q Robot (t i)) de optimización dado, una búsqueda de forma global en el tiempo busca encontrar una trayectoria q Robot (t) factible que minimice la suma (posiblemente ponderada) de todos los O (q Robot (t i)). Esto se opone a un método de mirar hacia adelante, tal como el divulgado en el documento US 0/246062A1, en el que la trayectoria se encuentra de forma iterativa a partir de un extremo y solo la siguiente o se consideran las siguientes etapas de tiempo. Por consiguiente, la presente invención proporciona un método implementado por ordenador para determinar unas trayectorias articuladas factibles para un robot n-dof (n > ) en un procesamiento invariante de giro de un objeto, tal como una molienda, una pintura, un corte (por ejemplo, un chorro de agua, un plasma y un láser), una pulverización, una trituración, un taladro, un avellanado y una soldadura, comprendiendo dicho método las etapas de: recibir datos geométricos que representan el objeto; recibir datos geométricos que representan la herramienta de procesamiento; recibir una trayectoria X (t) de herramienta, en la que t es el tiempo; buscar de forma global en el tiempo unas trayectorias q Robot (t) factibles usando IK (t) y q Tool (t) como un conjunto de posibles soluciones en el tiempo t, en el que q Robot (t) define las posiciones de todas las articulaciones en el robot como una función del tiempo, q Tool (t) define el giro de una brida de herramienta alrededor del eje de herramienta en el tiempo t, e IK (t) define las soluciones cinemáticas inversas para un X (t) y un q Tool (t) dados; determinar, a partir de los datos geométricos y de X (t), cómo debería elegirse la trayectoria q Robot (t) articulada con el fin de satisfacer uno o más criterios de optimización. Las etapas generales del método pueden mostrarse con el siguiente diagrama de flujo en la figura 1. Usando los datos geométricos del objeto y del propio robot para determinar automáticamente cómo orientar relativamente el objeto y el robot en el al menos un grado de libertad de giro a lo largo de la trayectoria de interacción, puede mejorarse el rendimiento de una operación. Además, como el programa informático determina la orientación angular relativa a lo largo de la trayectoria de interacción, no se necesita una entrada o una orientación del usuario. El método de la presente invención puede usarse para evaluar el curso del movimiento del robot que tomará durante una operación real. Esta evaluación puede producirse antes de una operación real. El método puede utilizarse para determinar una orientación fija, que es una orientación que no varía a lo largo de la trayectoria de interacción, con el fin de satisfacer uno o más criterios de optimización. Preferentemente el método comprende determinar cómo manipular la orientación relativa entre el robot y el objeto a medida que se mueven relativamente a lo largo de la trayectoria de interacción con el fin de satisfacer el uno o más criterios de optimización. 3
 adicional que describe el giro de la brida de herramienta alrededor del eje de herramienta en el tiempo t.")
4 Por consiguiente, el método puede usarse para determinar, antes de o durante una operación cómo variar la orientación relativa del robot y del objeto, mientras que el robot y el objeto se mueven relativamente a lo largo de una trayectoria de interacción Como se entenderá, los datos geométricos pueden comprender datos de dimensión. Los datos geométricos pueden comprender datos de la forma. Preferentemente, los datos geométricos comprenden datos tridimensionales ( 3D ). Los datos geométricos pueden comprender datos de posición. El método puede comprender la recuperación de los datos geométricos. Por ejemplo, los datos geométricos podrían recuperarse de un dispositivo de memoria. Los datos geométricos podrían obtenerse a partir de una medición previa obtenida de un objeto de referencia. Los datos geométricos podrían generarse por un usuario. Por ejemplo, los datos geométricos pueden ser datos de diseño asistido por ordenador ( CAD ). Por ejemplo, los datos geométricos pueden ser una representación de límites del objeto. Opcionalmente, los datos geométricos son un modelo poligonal del objeto. Como se entenderá, los datos geométricos recibidos del objeto y del robot pueden combinarse en un marco de coordenadas común. El robot podría ser una herramienta para mecanizar el objeto. Por ejemplo, la herramienta podría ser una herramienta de taladro, de molienda o de trituración. Como se entenderá la trayectoria de interacción puede comprender la trayectoria que el robot realiza durante una operación. Específicamente, la trayectoria de interacción puede comprender una trayectoria de mecanizado que realiza una herramienta durante una operación de mecanizado. La trayectoria de interacción podría ser una subtrayectoria de una pluralidad de sub-trayectorias que cuando se ejecutan en secuencia describen una operación de interacción por completo. La trayectoria de interacción puede comprender la trayectoria que el robot realiza durante una operación mientras que está en una relación de interacción en relación con el objeto. La trayectoria de interacción puede comprender la trayectoria que realiza una herramienta durante una operación de mecanizado mientras que el objeto está mecanizándose (por ejemplo, cortar, triturar o moler). En consecuencia, el método puede comprender determinar cómo orientar el robot, mientras que interactúa con el objeto. La trayectoria de interacción puede comprender la trayectoria que el robot realiza mientras se mueve de forma más general alrededor del objeto. Por consiguiente, la trayectoria de interacción puede comprender la trayectoria que el robot realiza entre unas posiciones en las que está en una relación de interacción en relación con el objeto. Como se entenderá, la trayectoria de interacción podría ser la trayectoria en el objeto que debe interactuarse por el robot. La trayectoria de interacción es normalmente la trayectoria en el objeto que debe mecanizarse, por ejemplo, un corte y/o una molienda. Como se entenderá, por ejemplo, si la trayectoria de interacción es una trayectoria fija en el objeto, entonces puede necesitarse reposicionar relativamente el robot en el al menos un grado de libertad lineal con el fin de obtener la orientación determinada. Por consiguiente, determinar cómo el robot y el objeto pueden orientarse relativamente entre sí, puede comprender determinar la posición relativa del robot y del objeto en el al menos un grado de libertad lineal. El método podría comprender obtener los datos que representan la trayectoria de interacción. La trayectoria de interacción podría introducirse por el usuario. En consecuencia, el método puede comprender recibir una trayectoria de interacción desde un dispositivo de interfaz de usuario. La trayectoria de interacción puede recuperarse a partir de un dispositivo de memoria. Los datos de la trayectoria de interacción pueden comprender una pluralidad de puntos. Por ejemplo, una trayectoria de interacción puede comprender una pluralidad de puntos en el objeto con los que debe interactuarse. Por ejemplo, una trayectoria podría comprender una pluralidad de puntos en el objeto que deben molerse o pintarse. Los puntos pueden ser puntos específicos. Opcionalmente, los datos de la trayectoria de interacción podrían comprender una línea, una dimensión, un grado de libertad o similares. Por ejemplo, los datos de la trayectoria de medición podrían comprender una línea, una dimensión, un grado de libertad o similares a lo largo del taladro que debe realizarse. Por ejemplo, la trayectoria de interacción puede comprender datos vectoriales. Opcionalmente, la trayectoria de interacción podría definirse como una curva entre dos puntos. Los criterios de optimización adecuados para su uso con la presente invención pueden incluir criterios en relación con la realización de una operación de interacción. En consecuencia, el método puede comprender determinar cómo la orientación relativa del robot y del objeto puede manipularse durante el movimiento del robot a lo largo de una trayectoria de interacción con el fin de satisfacer uno o más criterios de rendimiento. Los criterios de rendimiento pueden comprender una velocidad de interacción. Los criterios de rendimiento pueden comprender la longitud de la trayectoria de interacción. Los criterios de rendimiento pueden comprender un nivel de aceleración predeterminado. El nivel de aceleración predeterminado puede referirse a la aceleración del dispositivo. El nivel de aceleración predeterminado puede comprender una aceleración máxima. Los criterios de rendimiento pueden comprender la dirección del movimiento. Los criterios de optimización adecuados para su uso con la presente invención hacen comprender especialmente los criterios en relación con los límites del movimiento. 4

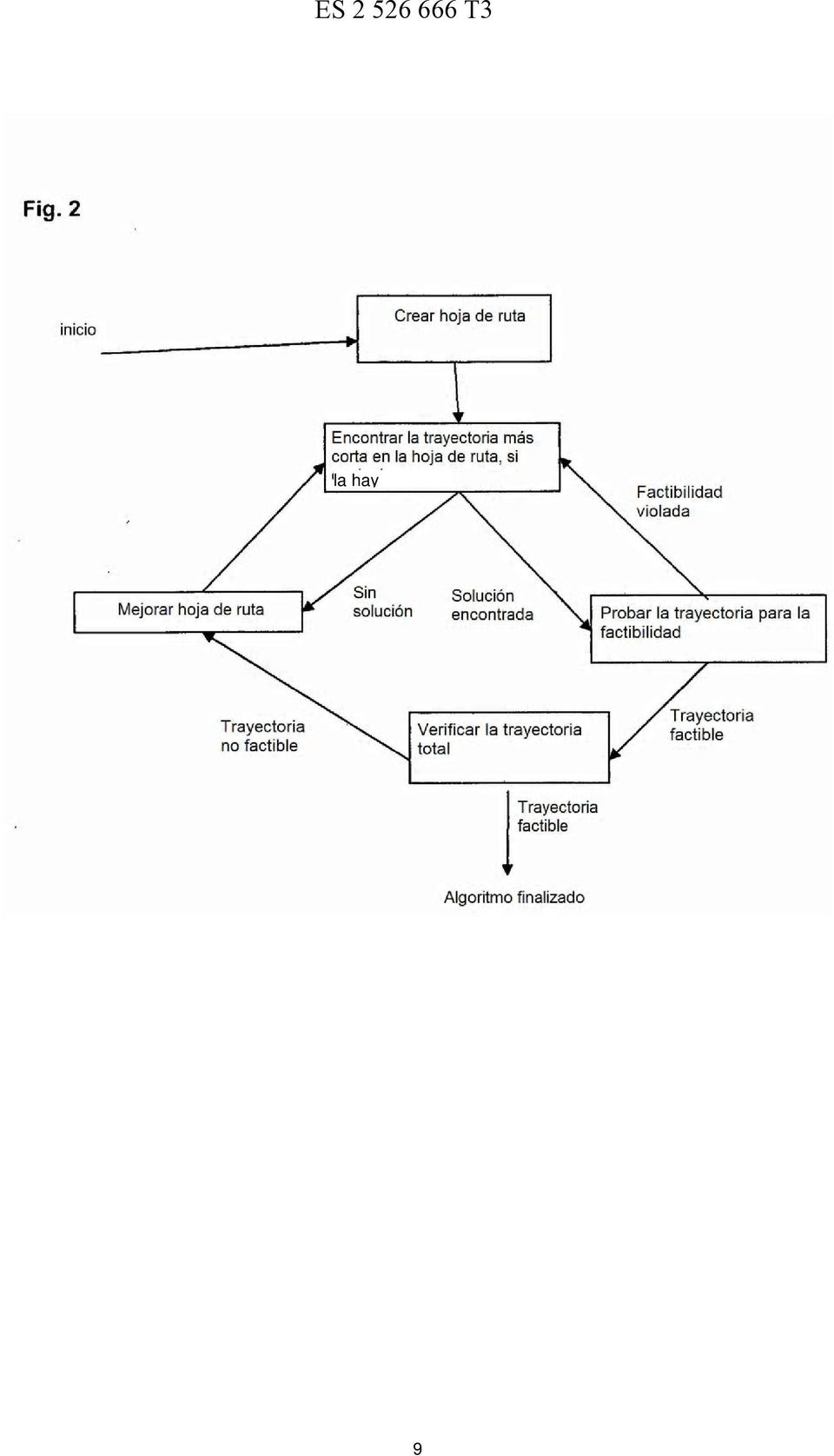
5 1 2 3 El método puede comprender para cada uno de una pluralidad de puntos a lo largo de la trayectoria de interacción determinar una pluralidad de orientaciones relativas entre el robot y el objeto que debe procesarse. El método puede comprender además, para cada uno de una pluralidad de puntos a lo largo de la trayectoria de interacción seleccionar solo unas orientaciones libres de colisión. El método puede comprender además seleccionar a partir de las orientaciones libres de colisión esas orientaciones que cumplan con uno o más criterios de optimización. El método puede comprender determinar el coste asociado con el movimiento entre un par de puntos a lo largo de la trayectoria de interacción. El coste podría estar en función de la orientación relativa del robot y del objeto en el par de puntos. En consecuencia, el método puede comprender determinar el coste del movimiento entre un par de puntos que tienen una primera combinación de orientación. El método puede comprender además determinar el coste del movimiento entre el mismo par de puntos que tienen una segunda combinación de orientación. Como se entenderá, la combinación de orientación de un par de puntos describe la orientación relativa del robot y del objeto en los puntos primero y segundo a lo largo de la trayectoria de interacción. Preferentemente, la orientación del robot en al menos uno de los puntos primero y segundo es diferente en la segunda combinación de orientación a la primera combinación de orientación. El método puede comprender seleccionar la combinación de la orientación que tiene el coste más bajo. Este método puede comprender determinar el coste para una pluralidad de pares de puntos a lo largo de la trayectoria de interacción. El método puede comprender seleccionar aquellas orientaciones en las que el coste total a lo largo de la trayectoria de interacción cumple con los criterios predeterminados. El criterio predeterminado podría ser seleccionar la trayectoria de interacción con el mínimo coste. Como se entenderá, el coste de movimiento puede ser un valor que representa una propiedad del movimiento entre los dos puntos. Por ejemplo, la propiedad podría ser la velocidad. La propiedad podría ser el tiempo. La propiedad podría ser la distancia. La propiedad podría ser la aceleración. El coste podría ser una combinación de dos o más de las propiedades mencionadas anteriormente. Opcionalmente, la propiedad de coste podría ser una entrada de un usuario. De acuerdo con otro aspecto de la invención, se proporciona un medio legible por ordenador, que tiene un código de programa de ordenador como se ha descrito anteriormente. De acuerdo con aún otro aspecto de la invención, se proporciona un ordenador que comprende: un procesador; y una memoria, en el que al menos uno de entre el procesador y la memoria está adaptado para realizar el método descrito anteriormente. Descripción detallada de la invención El objetivo del método de la presente invención es hacer uso de la propiedad de que el proceso es invariante con respecto al giro alrededor del eje de herramienta para facilitar la planificación del movimiento y con ello aumentar el espacio de trabajo del robot. Ejemplos de procesos invariantes de giro son moler, rociar con un abanico de pulverización circular, y soldar. A continuación, la presente invención se analiza por medio de una implementación real del método Encontrar trayectorias articuladas factibles para un robot n-dof superficial con un proceso invariante de giro (n > ), donde el proceso está moliendo y el sistema está configurado para: La entrada es un archivo de algún software CAM que describe la trayectoria de la herramienta de molienda Las especificaciones del robot reales (cinemáticas y de restricciones). Se ha trabajado con Fanuc R-00iB, Fanuc LRmate0iB y Kuka KRha, que son robots 6-dof. La salida es un archivo que describe la trayectoria del robot, el formato se realiza de acuerdo con el proveedor del robot. La estructura del algoritmo puede describirse como se muestra en la figura 2. La trayectoria de herramienta deseada X (t) está representada por las posiciones y orientaciones de herramienta específicas, X (t i), i = 0,..., N. Con el fin de buscar un q Tool (t) adecuado se define una hoja de ruta por los nodos q Tool (t i) específicos a lo largo de la trayectoria. Solo se permiten los nodos donde IK (X (t i), q Tool (t i)) proporciona un q Robot (t i) factible en la hoja de ruta, estos nodos se llaman factibles. Puede en cualquier fase en el algoritmo ser ninguno, uno o diversos q Tool (t i) para cada tiempo t i. Inicialmente, la hoja de ruta se rellena con nodos q Tool (t i) al azar. Dos nodos q Tool (t a) y q Tool (t b) están conectados con un borde si no están demasiado lejos el uno del otro en el tiempo ( t a-t b < t max) y el cambio en q Tool no es demasiado grande. El peso o el coste de un borde se compone de dos partes, una basada en el cambio en q Tool y la otra basada en los movimientos correspondientes de la articulación del robot, donde el coste más bajo se asigna a un borde con un pequeño cambio en q Tool y unos pequeños movimientos de la articulación del robot.

6 La hoja de ruta se busca para una trayectoria más corta usando el algoritmo de Dijkstra. A pesar de que todos los nodos de la hoja de ruta son factibles, la trayectoria encontrada debe controlarse para una factibilidad entre los nodos de la hoja de ruta. Inicialmente, esto se hace en cierta medida para minimizar el tiempo de cálculo. Si se viola la factibilidad en un borde específico de la hoja de ruta, el borde se borra y se busca de nuevo la hoja de ruta. Cuando una trayectoria es factible, debe verificarse de forma minuciosa lo que significa que todos los puntos en la trayectoria del proceso se controlen para la factibilidad. Si la trayectoria no es factible para todos los puntos o si no se encuentra una solución cuando se busca la hoja de ruta, la hoja de ruta se mejora con una serie de nuevos nodos factibles y la búsqueda comienza de nuevo. 6

7 REIVINDICACIONES Un método implementado por ordenador para determinar unas trayectorias articuladas factibles para un robot de n-dof (n > ) en un procesamiento invariante de giro de un objeto, tal como una molienda, una pintura y una soldadura, comprendiendo dicho método las etapas de: recibir datos geométricos que representan el objeto; recibir datos geométricos que representan la herramienta de procesamiento; recibir una trayectoria X (t) de herramienta, en la que t es el tiempo; buscar trayectorias q Robot (t) factibles usando IK (t) y q Tool (t) como un conjunto de posibles soluciones en el tiempo t, en donde q Robot (t) define posiciones de todas las articulaciones en el robot como una función del tiempo, q Tool (t) define el giro de una brida de herramienta alrededor del eje de herramienta en el tiempo t, e IK (t) define las soluciones cinemáticas inversas para un X (t) y un q Tool (t) proporcionados, extendiéndose dicho q Tool de 0 a 360 grados; determinar, a partir de los datos geométricos y de X (t), cómo debería elegirse la trayectoria q Robot (t) articulada con el fin de satisfacer uno o más criterios de optimización; y determinar cómo q Tool (t) puede controlarse con el fin de satisfacer una pluralidad de los criterios de optimización; caracterizado por que la búsqueda de trayectorias factibles se realiza de forma global en el tiempo, especificando el intervalo de tiempo de la trayectoria completa en t 1 < t 2... < t N-1 < t N. 2. Un método de acuerdo con la reivindicación 1, en el que el criterio de optimización comprende un movimiento libre de colisión. 3. Un método de acuerdo con la reivindicación 1, en el que el criterio de optimización comprende satisfacer las limitaciones en las posiciones de articulación y en las velocidades de articulación. 4. Un método de acuerdo con la reivindicación 1, en el que el criterio de optimización comprende otras limitaciones en los movimientos del robot distintas a las de la reivindicación 3.. Un método de acuerdo con una cualquiera de las reivindicaciones anteriores, que comprende determinar para cada uno de una pluralidad de puntos a lo largo de la trayectoria de interacción una pluralidad de opciones de giros de la brida de herramienta alrededor del eje de herramienta. 6. Un método de acuerdo con la reivindicación, que comprende seleccionar solo orientaciones libres de colisión. 7. Un método de acuerdo con una cualquiera de las reivindicaciones anteriores, que comprende repetir las etapas para una pluralidad de pares de puntos a lo largo de la trayectoria de interacción. 8. Un código de programa informático que comprende instrucciones que, cuando se ejecutan en un ordenador, hacen que el ordenador realice el método de cualquiera de las reivindicaciones 1 a Un medio legible por ordenador, que tiene un código de programa informático de acuerdo con la reivindicación 8.. Un ordenador que comprende: un procesador y una memoria, en el que al menos uno de entre el procesador y la memoria está adaptado para realizar el método de cualquiera de las reivindicaciones 1 a 9. 7
 de herramienta, en la que t es el tiempo; buscar trayectorias q Robot (t) factibles usando IK (t) y q Tool (t) como un conjunto de posibles soluciones en el tiempo t, en")
8 8

9 la hay 9
11 Número de publicación: 2 321 587. 51 Int. Cl.: 72 Inventor/es: Kunigita, Hisayuki. 74 Agente: Elzaburu Márquez, Alberto
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 321 587 51 Int. Cl.: G06T 11/60 (2006.01) G06T 15/00 (2006.01) G06Q 30/00 (2006.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 321 587 51 Int. Cl.: G06T 11/60 (2006.01) G06T 15/00 (2006.01) G06Q 30/00 (2006.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número
11 knúmero de publicación: 2 141 353. 51 kint. Cl. 6 : F16H 37/04. Número de solicitud europea: 95919718.7 86 kfecha de presentación : 12.05.
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 141 33 1 kint. Cl. 6 : F16H 37/04 F16H 7/02 B2J 18/00 B2J 9/ H02K 7/116 12 k TRADUCCION DE PATENTE EUROPEA T3 86 k Número
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 141 33 1 kint. Cl. 6 : F16H 37/04 F16H 7/02 B2J 18/00 B2J 9/ H02K 7/116 12 k TRADUCCION DE PATENTE EUROPEA T3 86 k Número
Int. Cl.: 74 Agente: Ungría López, Javier
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 361 129 1 Int. Cl.: B2J 1/00 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número de solicitud europea: 078289. 96 Fecha de
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 361 129 1 Int. Cl.: B2J 1/00 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número de solicitud europea: 078289. 96 Fecha de
11 Número de publicación: 2 256 996. 51 Int. Cl. 7 : B31B 19/74
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 26 996 1 Int. Cl. 7 : B31B 19/74 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99120740.8 86 Fecha de presentación
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 26 996 1 Int. Cl. 7 : B31B 19/74 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99120740.8 86 Fecha de presentación
11 Número de publicación: 2 207 542. 51 Int. Cl. 7 : B23K 9/10. 72 Inventor/es: Mela, Franco. 74 Agente: Ponti Sales, Adelaida
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 207 542 51 Int. Cl. 7 : B23K 9/10 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 00954462.8 86 Fecha de
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 207 542 51 Int. Cl. 7 : B23K 9/10 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 00954462.8 86 Fecha de
11 Número de publicación: 2 232 572. 51 Int. Cl. 7 : B23Q 17/00. 72 Inventor/es: Desmoulins, Marcel. 74 Agente: Urizar Anasagasti, José Antonio
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 232 72 1 Int. Cl. 7 : B23Q 17/00 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 01400203.4 86 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 232 72 1 Int. Cl. 7 : B23Q 17/00 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 01400203.4 86 Fecha de presentación:
11 knúmero de publicación: 2 127 379. 51 kint. Cl. 6 : B25J 9/04
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 127 379 51 kint. Cl. 6 : B25J 9/04 B25J 9/10 B25J 18/00 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 127 379 51 kint. Cl. 6 : B25J 9/04 B25J 9/10 B25J 18/00 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea:
Introducción. TEMA 2. MORFOLOGÍA
 2.1 Introducción TEMA 2. MORFOLOGÍA Introducción. Estructura mecánica. Estructura cinemática. Tipos de articulaciones. Configuraciones cinemáticas. Precisión de movimientos. 1 Introducción La configuración
2.1 Introducción TEMA 2. MORFOLOGÍA Introducción. Estructura mecánica. Estructura cinemática. Tipos de articulaciones. Configuraciones cinemáticas. Precisión de movimientos. 1 Introducción La configuración
DESPACHO: Edificio CPS (Área de Diseño y Fabricación)
") FABRICACIÓN INTEGRADA POR ORD. Y AUTOMATIZACIÓN DE LA PRODUCCIÓN CURSO: 3º MECANICOS HORARIO: LUNES 12:00-14:00 PROFESORES: Carlos Cajal ccajal@unizar.es Francisco Brosed fjbrosed@unizar.es Jesús Casanova
FABRICACIÓN INTEGRADA POR ORD. Y AUTOMATIZACIÓN DE LA PRODUCCIÓN CURSO: 3º MECANICOS HORARIO: LUNES 12:00-14:00 PROFESORES: Carlos Cajal ccajal@unizar.es Francisco Brosed fjbrosed@unizar.es Jesús Casanova
k 11 N. de publicación: ES 2 021 016 k 51 Int. Cl. 5 : A22B 5/00
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 021 016 k 51 Int. Cl. 5 : A22B 5/00 A22B 5/20 12 k TRADUCCION DE PATENTE EUROPEA B3 86 knúmero de solicitud europea: 87201602.7
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 021 016 k 51 Int. Cl. 5 : A22B 5/00 A22B 5/20 12 k TRADUCCION DE PATENTE EUROPEA B3 86 knúmero de solicitud europea: 87201602.7
11 knúmero de publicación: 2 144 127. 51 kint. Cl. 7 : B07C 5/342. k 72 Inventor/es: Wahlquist, Anders. k 74 Agente: Esteban Pérez-Serrano, M ā Isabel
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 144 127 1 Int. Cl. 7 : B07C /342 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99331.6 86 Fecha de presentación
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 144 127 1 Int. Cl. 7 : B07C /342 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99331.6 86 Fecha de presentación
11 knúmero de publicación: 2 141 193. 51 kint. Cl. 6 : B42F 11/02
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 141 193 1 Int. Cl. 6 : B42F 11/02 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 94201617.1 86 Fecha de
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 141 193 1 Int. Cl. 6 : B42F 11/02 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 94201617.1 86 Fecha de
35 Facultad de Ciencias Universidad de Los Andes Mérida-Venezuela. Potencial Eléctrico
 q 1 q 2 Prof. Félix Aguirre 35 Energía Electrostática Potencial Eléctrico La interacción electrostática es representada muy bien a través de la ley de Coulomb, esto es: mediante fuerzas. Existen, sin embargo,
q 1 q 2 Prof. Félix Aguirre 35 Energía Electrostática Potencial Eléctrico La interacción electrostática es representada muy bien a través de la ley de Coulomb, esto es: mediante fuerzas. Existen, sin embargo,
11 knúmero de publicación: 2 108 710. 51 kint. Cl. 6 : A61M 1/00. k 72 Inventor/es: Masaki, Nobuyuki. k 74 Agente: Carpintero López, Francisco
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 108 710 51 kint. Cl. 6 : A61M 1/00 k 12 TRADUCCION DE PATENTE EUROPEA T3 k k k k 86 Número de solicitud europea: 91900941.5
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 108 710 51 kint. Cl. 6 : A61M 1/00 k 12 TRADUCCION DE PATENTE EUROPEA T3 k k k k 86 Número de solicitud europea: 91900941.5
11 Número de publicación: 2 254 098. 51 Int. Cl. 7 : A61G 5/06. 72 Inventor/es: Koch, Michael. 74 Agente: Carpintero López, Francisco
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 24 098 1 Int. Cl. 7 : A61G /06 B62B /02 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 00121714.0 86 Fecha
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 24 098 1 Int. Cl. 7 : A61G /06 B62B /02 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 00121714.0 86 Fecha
Mecánica Racional 20 TEMA 3: Método de Trabajo y Energía.
 INTRODUCCIÓN. Mecánica Racional 20 Este método es útil y ventajoso porque analiza las fuerzas, velocidad, masa y posición de una partícula sin necesidad de considerar las aceleraciones y además simplifica
INTRODUCCIÓN. Mecánica Racional 20 Este método es útil y ventajoso porque analiza las fuerzas, velocidad, masa y posición de una partícula sin necesidad de considerar las aceleraciones y además simplifica
Int. Cl. 7 : B60R 25/10. 72 Inventor/es: Luthe, Christoph. 74 Agente: Lehmann Novo, María Isabel
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 246 78 1 Int. Cl. 7 : BR 2/ 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 0011971.1 86 Fecha de presentación
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 246 78 1 Int. Cl. 7 : BR 2/ 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 0011971.1 86 Fecha de presentación
11 Número de publicación: 2 214 889. 51 Int. Cl. 7 : A45C 13/18. 72 Inventor/es: Haller, Hubert. 74 Agente: Lehmann Novo, María Isabel
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 214 889 51 Int. Cl. 7 : A45C 13/18 E05G 1/00 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99948973.5 86
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 214 889 51 Int. Cl. 7 : A45C 13/18 E05G 1/00 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99948973.5 86
LABORATORIO Nº 2 GUÍA PARA REALIZAR FORMULAS EN EXCEL
 OBJETIVO Mejorar el nivel de comprensión y el manejo de las destrezas del estudiante para utilizar formulas en Microsoft Excel 2010. 1) DEFINICIÓN Una fórmula de Excel es un código especial que introducimos
OBJETIVO Mejorar el nivel de comprensión y el manejo de las destrezas del estudiante para utilizar formulas en Microsoft Excel 2010. 1) DEFINICIÓN Una fórmula de Excel es un código especial que introducimos
Planificación, Administración n de Bases de Datos. Bases de Datos. Ciclo de Vida de los Sistemas de Información. Crisis del Software.
 Planificación, n, Diseño o y Administración n de Crisis del Software Proyectos software de gran envergadura que se retrasaban, consumían todo el presupuesto disponible o generaban productos que eran poco
Planificación, n, Diseño o y Administración n de Crisis del Software Proyectos software de gran envergadura que se retrasaban, consumían todo el presupuesto disponible o generaban productos que eran poco
k 11 N. de publicación: ES 2 049 081 k 51 Int. Cl. 5 : B65B 9/06
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 049 081 k 1 Int. Cl. : B6B 9/06 B6B 7/00 B29C 6/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 049 081 k 1 Int. Cl. : B6B 9/06 B6B 7/00 B29C 6/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea:
51 Int. CI.: H04W 4/12 (2009.01) TRADUCCIÓN DE PATENTE EUROPEA
 TRADUCCIÓN DE PATENTE EUROPEA") 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 466 64 1 Int. CI.: H04W 4/18 (09.01) H04W 4/12 (09.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Fecha de presentación y número
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 466 64 1 Int. CI.: H04W 4/18 (09.01) H04W 4/12 (09.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Fecha de presentación y número
11 Número de publicación: 2 240 556. 51 Int. Cl. 7 : A43C 15/16. 72 Inventor/es: Jungkind, Roland. 74 Agente: Díez de Rivera y Elzaburu, Ignacio
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 240 6 1 Int. Cl. 7 : A43C 1/16 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 01993409.0 86 Fecha de presentación
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 240 6 1 Int. Cl. 7 : A43C 1/16 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 01993409.0 86 Fecha de presentación
11 knúmero de publicación: 2 150 799. 51 kint. Cl. 7 : B65G 1/02
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 799 1 kint. Cl. 7 : B6G 1/02 A47B 47/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 98221.0 86
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 799 1 kint. Cl. 7 : B6G 1/02 A47B 47/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 98221.0 86
MOVIMIENTO ABSOLUTO Y MOVIMIENTO RELATIVO
 BOLILLA 5 MOVIMIENTO ABSOLUTO Y MOVIMIENTO RELATIVO Sistemas de referencia Inerciales y No-inerciales En la bolilla anterior vimos que las leyes de Newton se cumplían en marcos de referencia inercial.
BOLILLA 5 MOVIMIENTO ABSOLUTO Y MOVIMIENTO RELATIVO Sistemas de referencia Inerciales y No-inerciales En la bolilla anterior vimos que las leyes de Newton se cumplían en marcos de referencia inercial.
11 Número de publicación: 2 250 555. 51 Int. Cl. 7 : G09B 21/00. 74 Agente: Carvajal y Urquijo, Isabel
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 1 Int. Cl. 7 : G09B 21/00 B41J 3/32 G06F 3/02 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 01723.9 86
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 1 Int. Cl. 7 : G09B 21/00 B41J 3/32 G06F 3/02 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 01723.9 86
11 kn. de publicación: ES 2 082 185. 51 kint. Cl. 6 : G06K 7/10. k 72 Inventor/es: Bengtsson, Kjell. k 74 Agente: Alvarez López, Fernando
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 N. de publicación: ES 2 082 18 1 Int. Cl. 6 : G06K 7/ 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 9180072.9 86 Fecha de presentación
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 N. de publicación: ES 2 082 18 1 Int. Cl. 6 : G06K 7/ 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 9180072.9 86 Fecha de presentación
Sesión 3 - Movimiento Diferencial
 Sesión 3 - Movimiento Diferencial Qué aprenderemos en esta sesión? Para entender como nuestro robot se va a desplazar por cualquier superficie, debemos aprender la manera en que lo hace, por eso, en esta
Sesión 3 - Movimiento Diferencial Qué aprenderemos en esta sesión? Para entender como nuestro robot se va a desplazar por cualquier superficie, debemos aprender la manera en que lo hace, por eso, en esta
Unidad: Representación gráfica del movimiento
 Unidad: Representación gráfica del movimiento Aplicando y repasando el concepto de rapidez Esta primera actividad repasa el concepto de rapidez definido anteriormente. Posición Esta actividad introduce
Unidad: Representación gráfica del movimiento Aplicando y repasando el concepto de rapidez Esta primera actividad repasa el concepto de rapidez definido anteriormente. Posición Esta actividad introduce
_ Antología de Física I. Unidad II Vectores. Elaboró: Ing. Víctor H. Alcalá-Octaviano
 24 Unidad II Vectores 2.1 Magnitudes escalares y vectoriales Unidad II. VECTORES Para muchas magnitudes físicas basta con indicar su valor para que estén perfectamente definidas y estas son las denominadas
24 Unidad II Vectores 2.1 Magnitudes escalares y vectoriales Unidad II. VECTORES Para muchas magnitudes físicas basta con indicar su valor para que estén perfectamente definidas y estas son las denominadas
Capítulo 4 Análisis y diseño del software de los Robots
 Capítulo 4 Análisis y diseño del software de los Robots En el capítulo del diseño mecánico de los robots se muestran los distintos sensores que se utilizarán como entradas, así como los motores que deberán
Capítulo 4 Análisis y diseño del software de los Robots En el capítulo del diseño mecánico de los robots se muestran los distintos sensores que se utilizarán como entradas, así como los motores que deberán
11 Número de publicación: 2 265 387. 51 Int. Cl.: 74 Agente: Ponti Sales, Adelaida
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 26 387 1 Int. Cl.: A22C 21/00 (06.01) B6G 47/61 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 01221.9
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 26 387 1 Int. Cl.: A22C 21/00 (06.01) B6G 47/61 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 01221.9
EL MODELO DE ESTRATIFICACIÓN POR CAPAS DE TCP/IP DE INTERNET
 1 EL MODELO DE ESTRATIFICACIÓN POR CAPAS DE TCP/IP DE INTERNET Cada capa de la pila añade a los datos a enviar a la capa inferior, información de control para que el envío sea correcto. Esta información
1 EL MODELO DE ESTRATIFICACIÓN POR CAPAS DE TCP/IP DE INTERNET Cada capa de la pila añade a los datos a enviar a la capa inferior, información de control para que el envío sea correcto. Esta información
Int. Cl.: 72 Inventor/es: Ortubai Balanzategui, Kristina. 74 Agente: Carvajal y Urquijo, Isabel
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 279 19 1 Int. Cl.: A63F 3/00 (2006.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 0378144.4 86 Fecha
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 279 19 1 Int. Cl.: A63F 3/00 (2006.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 0378144.4 86 Fecha
11 Número de publicación: 2 219 742. 51 Int. Cl. 7 : B23B 1/00. 72 Inventor/es: Simonin, Jean-Claude. 74 Agente: Aragonés Forner, Rafael Ángel
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 219 742 1 Int. Cl. 7 : B23B 1/00 B23Q /34 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 97810608.6 86 Fecha
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 219 742 1 Int. Cl. 7 : B23B 1/00 B23Q /34 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 97810608.6 86 Fecha
11 knúmero de publicación: 2 177 634. 51 kint. Cl. 7 : B29D 11/00. k 72 Inventor/es: Apollonio, Attilio. k 74 Agente: Ungría López, Javier
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 177 634 1 Int. Cl. 7 : B29D 11/00 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99116.9 86 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 177 634 1 Int. Cl. 7 : B29D 11/00 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99116.9 86 Fecha de presentación:
ES 2 444 916 T3 DESCRIPCIÓN
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 444 916 1 Int. CI.: F41A 23/34 (06.01) F41G /06 (06.01) F41G 3/04 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Fecha de presentación
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 444 916 1 Int. CI.: F41A 23/34 (06.01) F41G /06 (06.01) F41G 3/04 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Fecha de presentación
k 11 N. de publicación: ES 2 012 852 k 21 Número de solicitud: 8802912 k 51 Int. Cl. 4 : G07F 17/32 k 73 Titular/es: Ainsworth Nominees Pty.
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 012 852 k 21 Número de solicitud: 8802912 k 51 Int. Cl. 4 : G07F 17/32 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA k 11 N. de publicación: ES 2 012 852 k 21 Número de solicitud: 8802912 k 51 Int. Cl. 4 : G07F 17/32 k 12 PATENTEDEINVENCION A6 k 22 Fecha de presentación:
Centro de Capacitación en Informática
 Fórmulas y Funciones Las fórmulas constituyen el núcleo de cualquier hoja de cálculo, y por tanto de Excel. Mediante fórmulas, se llevan a cabo todos los cálculos que se necesitan en una hoja de cálculo.
Fórmulas y Funciones Las fórmulas constituyen el núcleo de cualquier hoja de cálculo, y por tanto de Excel. Mediante fórmulas, se llevan a cabo todos los cálculos que se necesitan en una hoja de cálculo.
El presente reporte de tesis describe los procesos llevados acabo para el diseño y
 CAPITULO 1.-INTRODUCCIÓN El presente reporte de tesis describe los procesos llevados acabo para el diseño y construcción de un prototipo de sensor de torque. El primer paso, consistió en realizar un estudio
CAPITULO 1.-INTRODUCCIÓN El presente reporte de tesis describe los procesos llevados acabo para el diseño y construcción de un prototipo de sensor de torque. El primer paso, consistió en realizar un estudio
Trabajo, fuerzas conservativas. Energia.
 Trabajo, fuerzas conservativas. Energia. TRABAJO REALIZADO POR UNA FUERZA CONSTANTE. Si la fuerza F que actúa sobre una partícula constante (en magnitud y dirección) el movimiento se realiza en línea recta
Trabajo, fuerzas conservativas. Energia. TRABAJO REALIZADO POR UNA FUERZA CONSTANTE. Si la fuerza F que actúa sobre una partícula constante (en magnitud y dirección) el movimiento se realiza en línea recta
k 11 N. de publicación: ES 2 046 714 k 51 Int. Cl. 5 : B60C 5/08 k 72 Inventor/es: Sicard, Alain k 74 Agente: Esteban Pérez-Serrano, M ā Isabel
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 N. de publicación: ES 2 046 714 1 Int. Cl. : BC /08 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 900164.1 86 Fecha de presentación
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 N. de publicación: ES 2 046 714 1 Int. Cl. : BC /08 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 900164.1 86 Fecha de presentación
11 Número de publicación: 2 213 348. 51 Int. Cl. 7 : H04Q 7/38. 72 Inventor/es: Longhi, Patrice. 74 Agente: Tavira Montes-Jovellar, Antonio
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 213 348 1 Int. Cl. 7 : H04Q 7/38 H04K 3/00 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 9990163. 86 Fecha
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 213 348 1 Int. Cl. 7 : H04Q 7/38 H04K 3/00 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 9990163. 86 Fecha
51 Int. CI.: H04M 1/22 (2006.01) H04M 1/725 (2006.01) TRADUCCIÓN DE PATENTE EUROPEA. 72 Inventor/es: 74 Agente/Representante:
 H04M 1/725 (2006.01) TRADUCCIÓN DE PATENTE EUROPEA. 72 Inventor/es: 74 Agente/Representante:") 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 44 869 1 Int. CI.: H04M 1/22 (2006.01) H04M 1/72 (2006.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Fecha de presentación y número
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 44 869 1 Int. CI.: H04M 1/22 (2006.01) H04M 1/72 (2006.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Fecha de presentación y número
11 Número de publicación: 2 263 258. 51 Int. Cl.: 72 Inventor/es: Okabe, Shouji. 74 Agente: Sugrañes Moliné, Pedro
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 263 28 1 Int. Cl.: H04M 19/08 (2006.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 9930679. 86 Fecha
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 263 28 1 Int. Cl.: H04M 19/08 (2006.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 9930679. 86 Fecha
TIPOS DE RESTRICCIONES
 RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
11 Número de publicación: 2 255 031. 51 Int. Cl.: 72 Inventor/es: Lee, Henry. 74 Agente: Zea Checa, Bernabé
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 255 031 51 Int. Cl.: A45B 3/04 (2006.01) A45B 23/00 (2006.01) F21V 33/00 (2006.01) F21S 4/00 (2006.01) F21V 21/088 (2006.01)
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 255 031 51 Int. Cl.: A45B 3/04 (2006.01) A45B 23/00 (2006.01) F21V 33/00 (2006.01) F21S 4/00 (2006.01) F21V 21/088 (2006.01)
k 11 N. de publicación: ES 2 030 155 k 51 Int. Cl. 5 : A61G 15/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 0 1 k 1 Int. Cl. : A61G 1/00 A61B 19/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 881222.2 86
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 0 1 k 1 Int. Cl. : A61G 1/00 A61B 19/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 881222.2 86
11 Número de publicación: 2 203 094. 51 Int. Cl. 7 : B60N 2/02. 74 Agente: Justo Vázquez, Jorge Miguel de
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 3 094 1 Int. Cl. 7 : BN 2/02 A47C 1/024 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud: 9991184.0 86 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 3 094 1 Int. Cl. 7 : BN 2/02 A47C 1/024 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud: 9991184.0 86 Fecha de presentación:
Manual de OpenOffice Impress
 Manual de OpenOffice Impress. Capítulo 4. Trabajando con gráficos, esquemas y plantillas 1 Manual de OpenOffice Impress Capítulo 4: Trabajando con gráficos, esquemas y plantillas Este material es una adaptación
Manual de OpenOffice Impress. Capítulo 4. Trabajando con gráficos, esquemas y plantillas 1 Manual de OpenOffice Impress Capítulo 4: Trabajando con gráficos, esquemas y plantillas Este material es una adaptación
11 kn. de publicación: ES 2 077 899. 51 kint. Cl. 6 : B60F 1/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 kn. de publicación: ES 2 077 899 51 kint. Cl. 6 : B60F 1/00 B61J 1/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 92104157.0
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 kn. de publicación: ES 2 077 899 51 kint. Cl. 6 : B60F 1/00 B61J 1/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 92104157.0
11 knúmero de publicación: 2 128 845. 51 kint. Cl. 6 : B25H 1/00
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 128 845 51 kint. Cl. 6 : B25H 1/00 B66F 7/08 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 96909035.6
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 128 845 51 kint. Cl. 6 : B25H 1/00 B66F 7/08 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 96909035.6
k 11 N. de publicación: ES 2 032 728 k 51 Int. Cl. 5 : E05F 3/10 k 72 Inventor/es: Tillmann, Horst k 74 Agente: Elzaburu Márquez, Alberto
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 N. de publicación: ES 2 032 728 1 Int. Cl. : E0F 3/10 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 91120383.4 86 Fecha de presentación
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 N. de publicación: ES 2 032 728 1 Int. Cl. : E0F 3/10 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 91120383.4 86 Fecha de presentación
INTRODUCCION AL CONTROL AUTOMATICO DE PROCESOS
 INTRODUCCION AL CONTROL AUTOMATICO DE PROCESOS El control automático de procesos es parte del progreso industrial desarrollado durante lo que ahora se conoce como la segunda revolución industrial. El uso
INTRODUCCION AL CONTROL AUTOMATICO DE PROCESOS El control automático de procesos es parte del progreso industrial desarrollado durante lo que ahora se conoce como la segunda revolución industrial. El uso
Curso: FT433 - Introducción a la virtualización con VirtualBox
 forumtecnico.com Curso: FT433 - Introducción a la virtualización con VirtualBox Configuración de red Uno de los aspectos de la virtualización con más número de opciones es la configuración de red. Recordemos
forumtecnico.com Curso: FT433 - Introducción a la virtualización con VirtualBox Configuración de red Uno de los aspectos de la virtualización con más número de opciones es la configuración de red. Recordemos
11 knúmero de publicación: 2 176 384. 51 kint. Cl. 7 : A41G 3/00. k 72 Inventor/es: Ragazzi, Cesare. k 74 Agente: Ponti Sales, Adelaida
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 176 384 1 Int. Cl. 7 : A41G 3/00 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 96114776.6 86 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 176 384 1 Int. Cl. 7 : A41G 3/00 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 96114776.6 86 Fecha de presentación:
DCU Diagramas de casos de uso
 DCU Diagramas de casos de uso Universidad de Oviedo Departamento de Informática Contenidos Introducción Elementos básicos Más sobre los actores Más sobre los casos de uso Más sobre las asociaciones Otros
DCU Diagramas de casos de uso Universidad de Oviedo Departamento de Informática Contenidos Introducción Elementos básicos Más sobre los actores Más sobre los casos de uso Más sobre las asociaciones Otros
Geometría Tridimensional
 Capítulo 4 Geometría Tridimensional En dos dimensiones trabajamos en el plano mientras que en tres dimensiones trabajaremos en el espacio, también provisto de un sistema de coordenadas. En el espacio,
Capítulo 4 Geometría Tridimensional En dos dimensiones trabajamos en el plano mientras que en tres dimensiones trabajaremos en el espacio, también provisto de un sistema de coordenadas. En el espacio,
11 Número de publicación: 2 242 073. 51 Int. Cl. 7 : A47G 29/14. 74 Agente: Carpintero López, Francisco
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 242 073 1 Int. Cl. 7 : A47G 29/14 G07C 9/00 G07F 17/12 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 02779139.1
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 242 073 1 Int. Cl. 7 : A47G 29/14 G07C 9/00 G07F 17/12 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 02779139.1
11 Número de publicación: 2 200 458. 51 Int. Cl. 7 : B42D 15/02. 72 Inventor/es: Ziggel, Carsten. 74 Agente: Roeb Diaz-Álvarez, Maria
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 0 48 1 Int. Cl. 7 : B42D 1/02 G11B 7/24 G11B 23/ 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud: 991239.2 86 Fecha
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 0 48 1 Int. Cl. 7 : B42D 1/02 G11B 7/24 G11B 23/ 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud: 991239.2 86 Fecha
JOSÉ PERAZA, FÍSICA 2 JOSÉ PERAZA, FÍSICA 2 JOSÉ PERAZA, FÍSICA 2 Energía Potencial eléctrica
 Energía Potencial eléctrica Si movemos la carga q2 respecto a la carga q1 Recordemos que la diferencia en la energía tenemos que: potencial U cuando una partícula se mueve entre dos puntos a y b bajo la
Energía Potencial eléctrica Si movemos la carga q2 respecto a la carga q1 Recordemos que la diferencia en la energía tenemos que: potencial U cuando una partícula se mueve entre dos puntos a y b bajo la
11 Número de publicación: 2 275 622. 51 Int. Cl.: 72 Inventor/es: Fast, Peder. 74 Agente: Isern Jara, Jorge
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 27 622 1 Int. Cl.: H04Q 7/32 (06.01) G07F 7/12 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 01272427.4
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 27 622 1 Int. Cl.: H04Q 7/32 (06.01) G07F 7/12 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 01272427.4
TEMA 7: DIAGRAMAS EN UML
 TEMA 7: DIAGRAMAS EN UML Diagramas en UML El bloque de construcción básico de UML es un Diagrama Introducción a UML 2 1 Modelo de Casos de Uso (MCU) Todos los casos de uso constituyen el MCU que describe
TEMA 7: DIAGRAMAS EN UML Diagramas en UML El bloque de construcción básico de UML es un Diagrama Introducción a UML 2 1 Modelo de Casos de Uso (MCU) Todos los casos de uso constituyen el MCU que describe
INVENTARIO INTRODUCCIÓN RESUMEN DE PASOS
 INVENTARIO INTRODUCCIÓN Es habitual que en las empresas realicen a final de año un Inventario. Con este proceso se pretende controlar el nivel de stock existente, para iniciar el nuevo ejercicio, conociendo
INVENTARIO INTRODUCCIÓN Es habitual que en las empresas realicen a final de año un Inventario. Con este proceso se pretende controlar el nivel de stock existente, para iniciar el nuevo ejercicio, conociendo
3.9. Tutorial Excavadora
 3.9. Tutorial Excavadora 3.9.1. Introducción En este tutorial se va a simular el funcionamiento de una retroexcavadora. Como se sabe, el movimiento de una excavadora está gobernado por unos cilindros hidráulicos,
3.9. Tutorial Excavadora 3.9.1. Introducción En este tutorial se va a simular el funcionamiento de una retroexcavadora. Como se sabe, el movimiento de una excavadora está gobernado por unos cilindros hidráulicos,
Diagramas del UML. A continuación se describirán los diagramas más comunes del UML y los conceptos que representan: Diagrama de Clases
 El UML está compuesto por diversos elementos gráficos que se combinan para conformar diagramas. Debido a que el UML es un lenguaje, cuenta con reglas para combinar tales elementos. La finalidad de los
El UML está compuesto por diversos elementos gráficos que se combinan para conformar diagramas. Debido a que el UML es un lenguaje, cuenta con reglas para combinar tales elementos. La finalidad de los
CONTROL Y PROGRAMACIÓN DE ROBOTS
 CONTROL Y PROGRAMACIÓN DE ROBOTS GUIA FACIL DE UTILIZACIÓN DEL SCORBOT ER-VII: Esta guía fácil, pretende aportar unos pocos conocimientos básicos, sobre el manejo y programación del Scorbot ER-VII, de
CONTROL Y PROGRAMACIÓN DE ROBOTS GUIA FACIL DE UTILIZACIÓN DEL SCORBOT ER-VII: Esta guía fácil, pretende aportar unos pocos conocimientos básicos, sobre el manejo y programación del Scorbot ER-VII, de
11 kn. de publicación: ES 2 080 344. 51 kint. Cl. 6 : F02C 7/26
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 kn. de publicación: ES 2 080 344 1 kint. Cl. 6 : F02C 7/26 F01D 19/00 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 91920661.
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 kn. de publicación: ES 2 080 344 1 kint. Cl. 6 : F02C 7/26 F01D 19/00 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 91920661.
Cómo funciona un control proporcional derivativo (PD)?
?") Cómo funciona un control proporcional derivativo (PD)? Adaptación del artículo: http://iesseveroochoa.edu.gva.es/severobot/2011/01/29/como-funciona-un-controlador-pd/ para el El tren de tracción diferencial
Cómo funciona un control proporcional derivativo (PD)? Adaptación del artículo: http://iesseveroochoa.edu.gva.es/severobot/2011/01/29/como-funciona-un-controlador-pd/ para el El tren de tracción diferencial
11 Número de publicación: 2 209 360. 51 Int. Cl. 7 : B23K 9/127. 72 Inventor/es: Billerot, Francis. 74 Agente: Lehmann Novo, María Isabel
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 209 360 1 Int. Cl. 7 : B23K 9/127 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99402814.0 86 Fecha de
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 209 360 1 Int. Cl. 7 : B23K 9/127 12 TRADUCCIÓN DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99402814.0 86 Fecha de
El motor eléctrico. Física. Liceo integrado de zipaquira MOTOR ELECTRICO
 El motor eléctrico Física Liceo integrado de zipaquira MOTOR ELECTRICO Motores y generadores eléctricos, grupo de aparatos que se utilizan para convertir la energía mecánica en eléctrica, o a la inversa,
El motor eléctrico Física Liceo integrado de zipaquira MOTOR ELECTRICO Motores y generadores eléctricos, grupo de aparatos que se utilizan para convertir la energía mecánica en eléctrica, o a la inversa,
ES 2 230 956 A1 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA. 11 Número de publicación: 2 230 956. 21 Número de solicitud: 200202096
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 230 956 21 Número de solicitud: 200202096 51 Int. Cl. 7 : B23Q 11/00 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación: 12.09.2002
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 230 956 21 Número de solicitud: 200202096 51 Int. Cl. 7 : B23Q 11/00 12 SOLICITUD DE PATENTE A1 22 Fecha de presentación: 12.09.2002
11 kn. de publicación: ES 2 076 749. 51 kint. Cl. 6 : B23F 15/06
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 kn. de publicación: ES 2 076 749 1 kint. Cl. 6 : B23F 1/06 B23F 23/12 B23F 21/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea:
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 kn. de publicación: ES 2 076 749 1 kint. Cl. 6 : B23F 1/06 B23F 23/12 B23F 21/02 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea:
Microsoft Excel. El Documento Excel. Interfase de Programa. Celdas
 Microsoft Excel Microsoft Excel (en adelante Excel) es una aplicación tipo Hoja de Cálculo destinada al diseño y generación de documentos a partir de datos numéricos. Podría entenderse como una calculadora
Microsoft Excel Microsoft Excel (en adelante Excel) es una aplicación tipo Hoja de Cálculo destinada al diseño y generación de documentos a partir de datos numéricos. Podría entenderse como una calculadora
CASO PRÁCTICO DISTRIBUCIÓN DE COSTES
 CASO PRÁCTICO DISTRIBUCIÓN DE COSTES Nuestra empresa tiene centros de distribución en tres ciudades europeas: Zaragoza, Milán y Burdeos. Hemos solicitado a los responsables de cada uno de los centros que
CASO PRÁCTICO DISTRIBUCIÓN DE COSTES Nuestra empresa tiene centros de distribución en tres ciudades europeas: Zaragoza, Milán y Burdeos. Hemos solicitado a los responsables de cada uno de los centros que
Este programa mueve cada motor de forma independiente, y cuando termina una línea pasa a la siguiente.
 1 Programa 1 Utilizando el icono añadimos un movimiento a por cada línea de programa. Podremos usar 8 posibles líneas de programa (Base, Hombro, Codo, Muñeca, Pinza, Salida 1, Salida 2 y línea en blanco).
1 Programa 1 Utilizando el icono añadimos un movimiento a por cada línea de programa. Podremos usar 8 posibles líneas de programa (Base, Hombro, Codo, Muñeca, Pinza, Salida 1, Salida 2 y línea en blanco).
CAPÍTULO I. Sistemas de Control Distribuido (SCD).
.") 1.1 Sistemas de Control. Un sistema es un ente cuya función es la de recibir acciones externas llamadas variables de entrada que a su vez provocan una o varias reacciones como respuesta llamadas variables
1.1 Sistemas de Control. Un sistema es un ente cuya función es la de recibir acciones externas llamadas variables de entrada que a su vez provocan una o varias reacciones como respuesta llamadas variables
k 11 N. de publicación: ES 2 047 221 k 51 Int. Cl. 5 : G01R 21/133
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 047 221 k 1 Int. Cl. : G01R 21/133 G11C 7/00 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 90116348.
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA k 11 N. de publicación: ES 2 047 221 k 1 Int. Cl. : G01R 21/133 G11C 7/00 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 90116348.
Int. a las ciencias computacionales
 Int. a las ciencias computacionales Representación grafica de cómo se encuentran conectados los ordenadores (nodos) en una red. Es la forma en que esta diseñada la red, bien FISICAMENTE (rigiéndose de
Int. a las ciencias computacionales Representación grafica de cómo se encuentran conectados los ordenadores (nodos) en una red. Es la forma en que esta diseñada la red, bien FISICAMENTE (rigiéndose de
Traslaciones, Homotecias, Giros y Simetrías
 Traslaciones, Homotecias, Giros y Simetrías Traslaciones Nombre e indicación Comando equivalente Vector entre Dos puntos Vector [A, B] Seleccionamos el icono correspondiente a la herramienta Vector entre
Traslaciones, Homotecias, Giros y Simetrías Traslaciones Nombre e indicación Comando equivalente Vector entre Dos puntos Vector [A, B] Seleccionamos el icono correspondiente a la herramienta Vector entre
Actividades Complementarias.
 4.1. Balanceo de Líneas. Unidad IV Monitoreo y Control de Operaciones El análisis de las líneas de producción es el foco central del análisis de disposiciones físicas por productos. El diseño del producto
4.1. Balanceo de Líneas. Unidad IV Monitoreo y Control de Operaciones El análisis de las líneas de producción es el foco central del análisis de disposiciones físicas por productos. El diseño del producto
ESQUEMAS DE SISTEMAS VOIP CON ALTA DISPONIBILIDAD Y ALTO RENDIMIENTO
 CAPÍTULO 6 ESQUEMAS DE SISTEMAS VOIP CON ALTA DISPONIBILIDAD Y ALTO RENDIMIENTO 1 Introducción El objetivo de este capítulo es mostrar la posibilidad de integración del servicio de VoIP Asterisk con los
CAPÍTULO 6 ESQUEMAS DE SISTEMAS VOIP CON ALTA DISPONIBILIDAD Y ALTO RENDIMIENTO 1 Introducción El objetivo de este capítulo es mostrar la posibilidad de integración del servicio de VoIP Asterisk con los
Las patentes: fuente de información TECNOLÓGICA. Introducción. http://patentscope.wipo.int/
 Las patentes: fuente de información TECNOLÓGICA Introducción http://patentscope.wipo.int/ 2 Las patentes constituyen una amplia fuente de información que abarca todos los ámbitos de la tecnología. Resulta
Las patentes: fuente de información TECNOLÓGICA Introducción http://patentscope.wipo.int/ 2 Las patentes constituyen una amplia fuente de información que abarca todos los ámbitos de la tecnología. Resulta
11 kn. de publicación: ES 2 075 192. 51 kint. Cl. 6 : B29C 55/06
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 kn. de publicación: ES 2 07 192 1 kint. Cl. 6 : B29C /06 //B29K 27/18 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 90890096.2
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 kn. de publicación: ES 2 07 192 1 kint. Cl. 6 : B29C /06 //B29K 27/18 12 k TRADUCCION DE PATENTE EUROPEA T3 86 knúmero de solicitud europea: 90890096.2
FABRICACIÓN N ASISTIDA POR ORDENADOR
 FABRICACIÓN N ASISTIDA POR ORDENADOR Control Numérico E.T.S.I.. de Bilbao Curso 2010-2011 2011 Aitzol Lamikiz Mentxaka FABRICACIÓN N ASISTIDA POR ORDENADOR Control Numérico Tema 08: Verificación n de programas
FABRICACIÓN N ASISTIDA POR ORDENADOR Control Numérico E.T.S.I.. de Bilbao Curso 2010-2011 2011 Aitzol Lamikiz Mentxaka FABRICACIÓN N ASISTIDA POR ORDENADOR Control Numérico Tema 08: Verificación n de programas
SOLUCIONES DE METROLOGÍA ESCÁNERES 3D CMM ÓPTICOS MONTADOS EN ROBOT PARA LA INSPECCIÓN AUTOMATIZADA
 SOLUCIONES DE METROLOGÍA ESCÁNERES 3D CMM ÓPTICOS MONTADOS EN ROBOT PARA LA INSPECCIÓN AUTOMATIZADA Dentro de la gama MetraSCAN 3D TM de Creaform, los escáneres 3D CMM ópticos MetraSCAN-R TM montados en
SOLUCIONES DE METROLOGÍA ESCÁNERES 3D CMM ÓPTICOS MONTADOS EN ROBOT PARA LA INSPECCIÓN AUTOMATIZADA Dentro de la gama MetraSCAN 3D TM de Creaform, los escáneres 3D CMM ópticos MetraSCAN-R TM montados en
El reto de la Gestión Documental
 El reto de la Gestión Documental Introducción Quizá la pregunta más habitual que nos hacemos al considerar soluciones de Gestión Documental sea cómo puedo digitalizar la enorme cantidad de documentos que
El reto de la Gestión Documental Introducción Quizá la pregunta más habitual que nos hacemos al considerar soluciones de Gestión Documental sea cómo puedo digitalizar la enorme cantidad de documentos que
Lista de la Verificación de la Gestión de la Seguridad y Salud Ocupacional 1
 Lista de la Verificación de la Gestión de la Seguridad y Salud Ocupacional 1 Sección Punto de Control Cumplimiento 4. Requisitos del Sistema de gestión de la seguridad y salud ocupacional 4.1 Requisitos
Lista de la Verificación de la Gestión de la Seguridad y Salud Ocupacional 1 Sección Punto de Control Cumplimiento 4. Requisitos del Sistema de gestión de la seguridad y salud ocupacional 4.1 Requisitos
6. SISTEMAS CAD-CAM (CAM) 6.1. CONCEPTO DE CAM
 6.1. CONCEPTO DE CAM") 6.1. CONCEPTO DE CAM Las siglas CAM corresponden al acrónimo de Computer Aided Manufacturing, Fabricación asistida por ordenador. Por CAM se entiende la utilización de ordenadores para tareas técnicas
6.1. CONCEPTO DE CAM Las siglas CAM corresponden al acrónimo de Computer Aided Manufacturing, Fabricación asistida por ordenador. Por CAM se entiende la utilización de ordenadores para tareas técnicas
Direccionamiento IPv4
 Direccionamiento IPV4 Página 1 de 15 www.monografias.com Direccionamiento IPv4 1. Direccionamiento IP 2. Componentes de una dirección IP 3. Determinación de la clase de dirección 4. Determinación de los
Direccionamiento IPV4 Página 1 de 15 www.monografias.com Direccionamiento IPv4 1. Direccionamiento IP 2. Componentes de una dirección IP 3. Determinación de la clase de dirección 4. Determinación de los
Int. Cl.: 72 Inventor/es: Meier, Reinhold. 74 Agente: Roeb Díaz-Álvarez, María
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 322 3 1 Int. Cl.: B23K 26/34 (06.01) F16J 1/44 (06.01) F01D 11/12 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número de solicitud
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 322 3 1 Int. Cl.: B23K 26/34 (06.01) F16J 1/44 (06.01) F01D 11/12 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número de solicitud
Líneas Equipotenciales
 Líneas Equipotenciales A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. En esta experiencia se estudia
Líneas Equipotenciales A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. En esta experiencia se estudia
ASEGURAMIENTO DE LA CALIDAD EN LABORATORIO
 FUNDACION NEXUS ASEGURAMIENTO DE LA CALIDAD EN LABORATORIO Marzo de 2012 CALIDAD, CONTROL DE LA CALIDAD Y ASEGURAMIENTO DE LA CALIDAD El laboratorio de análisis ofrece a sus clientes un servicio que se
FUNDACION NEXUS ASEGURAMIENTO DE LA CALIDAD EN LABORATORIO Marzo de 2012 CALIDAD, CONTROL DE LA CALIDAD Y ASEGURAMIENTO DE LA CALIDAD El laboratorio de análisis ofrece a sus clientes un servicio que se
ES 1 013 957 U. Número de publicación: 1 013 957 REGISTRO DE LA PROPIEDAD INDUSTRIAL. Número de solicitud: U 9001555. Int. Cl.
 k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 013 97 21 k Número de solicitud: U 9001 1 k Int. Cl. : A61C 1/04 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
k 19 REGISTRO DE LA PROPIEDAD INDUSTRIAL ESPAÑA 11 k Número de publicación: 1 013 97 21 k Número de solicitud: U 9001 1 k Int. Cl. : A61C 1/04 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de presentación:
Para ingresar a la aplicación Microsoft PowerPoint 97, los pasos que se deben seguir pueden ser los siguientes:
 Descripción del ambiente de trabajo Entrar y salir de la aplicación Para ingresar a la aplicación Microsoft PowerPoint 97, los pasos que se deben seguir pueden ser los siguientes: A través del botón :
Descripción del ambiente de trabajo Entrar y salir de la aplicación Para ingresar a la aplicación Microsoft PowerPoint 97, los pasos que se deben seguir pueden ser los siguientes: A través del botón :
11 knúmero de publicación: 2 187 100. 51 kint. Cl. 7 : A41D 31/00. k 72 Inventor/es: Schäfer, Werner; k 74 Agente: Elzaburu Márquez, Alberto
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 187 0 1 Int. Cl. 7 : A41D 31/00 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99111829.0 86 Fecha de presentación:
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 187 0 1 Int. Cl. 7 : A41D 31/00 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 99111829.0 86 Fecha de presentación:
11 knúmero de publicación: 2 163 415. 51 kint. Cl. 7 : B01D 39/18
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 163 41 1 kint. Cl. 7 : B01D 39/18 B01D 39/08 B01D 39/16 A47L 9/14 12 k TRADUCCION DE PATENTE EUROPEA T3 86 k Número de solicitud
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 knúmero de publicación: 2 163 41 1 kint. Cl. 7 : B01D 39/18 B01D 39/08 B01D 39/16 A47L 9/14 12 k TRADUCCION DE PATENTE EUROPEA T3 86 k Número de solicitud
4. METODOLOGÍA. 4.1 Materiales. 4.1.1 Equipo
 4. METODOLOGÍA 4.1 Materiales 4.1.1 Equipo Equipo de cómputo. Para el empleo del la metodología HAZOP se requiere de un equipo de cómputo con interfase Windows 98 o más reciente con procesador Pentium
4. METODOLOGÍA 4.1 Materiales 4.1.1 Equipo Equipo de cómputo. Para el empleo del la metodología HAZOP se requiere de un equipo de cómputo con interfase Windows 98 o más reciente con procesador Pentium
11 knúmero de publicación: 2 135 795. 51 kint. Cl. 6 : B61C 17/04. k 72 Inventor/es: Barberis, Dario. k 74 Agente: Dávila Baz, Angel
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 13 79 1 Int. Cl. 6 : B61C 17/04 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 971.7 86 Fecha de presentación
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 13 79 1 Int. Cl. 6 : B61C 17/04 12 TRADUCCION DE PATENTE EUROPEA T3 86 Número de solicitud europea: 971.7 86 Fecha de presentación
Para crear formularios se utiliza la barra de herramientas Formulario, que se activa a través del comando Ver barra de herramientas.
 Formularios TEMA: FORMULARIOS. 1. INTRODUCCIÓN. 2. CREACIÓN DE FORMULARIOS. 3. INTRODUCIR DATOS EN UN FORMULARIO. 4. MODIFICAR UN FORMULARIO 5. MANERAS DE GUARDAR UN FORMULARIO. 6. IMPRIMIR FORMULARIOS.
Formularios TEMA: FORMULARIOS. 1. INTRODUCCIÓN. 2. CREACIÓN DE FORMULARIOS. 3. INTRODUCIR DATOS EN UN FORMULARIO. 4. MODIFICAR UN FORMULARIO 5. MANERAS DE GUARDAR UN FORMULARIO. 6. IMPRIMIR FORMULARIOS.