1. SISTEMAS DE ECUACIONES DIFERENCIALES
|
|
|
- Santiago Muñoz Coronel
- hace 7 años
- Vistas:
Transcripción
1 1 1 SISTEMAS DE ECUACIONES DIFERENCIALES 11 SISTEMAS LINEALES DE PRIMER ORDEN Un sistema de ecuaciones diferenciales del tipo dx 1 dt a 11 tx 1 + a 1n tx n + f 1 t dx n dt a n1 tx 1 + a nn tx n + f n t se denomina sistema lineal de primer orden Las funciones a ij t, f i t se supondrán continuas en un intervalo dado I a, b Si f i t para todo i 1,, n, se dice que el sistema es homogéneo La expresión del sistema anterior se suele hacer en forma matricial siendo X Xt x 1 t x n t 1 X AX + F A At F F t a 11 t a 1n t a n1 t a nn t f 1 t f n t Si el sistema es homogéneo, se escribe X AX x 1 t Definición 1 Diremos que el vector X es solución de 1 en x n t un intervalo I si sus elementos son funciones diferenciables que satisfacen 1 en dicho intervalo Definición 2 Problema del valor inicial Dado t I y dado X x 1 x n un vector cuyas entradas son constantes dadas, el problema de resolver X AX + F sujeto a la condición Xt X se denomina problema de valor inicial en el intervalo I

2 2 1 SISTEMAS DE ECUACIONES DIFERENCIALES Teorema 1 Dadas At y F t continuas en el intervalo I a, b, el problema de valor inicial 2 { X AX + F Xt X tiene una solución única definida en todo el intervalo I Teorema 2 Principio de superposición Dados X 1, X 2,, X m un conjunto de vectores solución del sistema homogéneo X AX en un intervalo I, la combinación lineal X c 1 X c m X m es también solución de X AX en el intervalo I Definición 3 Dependencia e independencia lineal de soluciones Dados X 1,, X m un conjunto de vectores solución del sistema homogéneo X AX en un intervalo I, se dice que el conjunto es linealmente dependiente en I si existen constantes c 1,, c m, no todas cero, tales que c 1 X c m X m para todo t I Si el conjunto de vectores no es linealmente dependiente, se dice que es linealmente independiente Teorema 3 Sean X 1,, X n n vectores solución del sistema homogéneo de n ecuaciones y de primer orden X AX en un intervalo I El conjunto de vectores es linealmente independiente en I si y sólo si el wronskiano W X 1,, X n X 1 X n Se puede probar que, si X 1,, X n son soluciones de X AX, entonces W X 1,, X n para todo t I o bien W X 1,, X n para todo t I De modo que, si existe un t tal que W en t, entonces W para todo t I, con lo que las soluciones son linealmente independientes en I Definición 4 Conjunto fundamental de soluciones Matriz fundamental Sea X AX un sistema homogéneo de n ecuaciones y de primer orden Un conjunto X 1,, X n de soluciones linealmente independientes del sistema en un intervalo I es un conjunto fundamental de soluciones A la matriz Φt X 1 X n que tiene a estos vectores solución por columnas, se le llama matriz fundamental del sistema X AX Obsérvese que Φt para todo t I

3 11 SISTEMAS LINEALES DE PRIMER ORDEN 3 Teorema 4 Solución general de un sistema homogéneo Dado un sistema homogéneo X AX en un intervalo I, existe siempre un conjunto fundamental de soluciones X 1,, X n en I, esto es, siempre se puede encontrar una matriz fundamental Φt La solución general del sistema homogéneo en I será X c 1 X c n X n donde c 1,, c n son constantes arbitrarias Dicho de modo eqivalente: X ΦtC donde Φt es una matriz fundamental y C c 1 es un vector formado por constantes Si buscamos la solución del problema de valor inicial { obtenemos X ΦtΦt 1 X X AX Xt X Teorema 5 Solución general de un sistema no homogéneo Dado el sistema no homogéneo X AX + F y dada una solución particular X p del mismo en el intervalo I, la solución general será c n X X h + X p siendo X h la solución general del sistema homogéneo asociado X AX Escrito de modo equivalente, X ΦtC + X p Sistemas no homogéneos Método de variación de las constantes Por lo visto arriba, si somos capaces de resolver el sistema homogéneo X AX, para obtener la solución general de X AX +F basta con conocer una solución particular del mismo Pero, cómo encontrarla? Se aplica el método de variación de las constantes, esto es, se conjetura la existencia de una solución particular del sistema no homogéneo, X p t ΦtCt, donde las constantes del vector C pasan a ser funciones Ct c 1 t c n t

4 4 1 SISTEMAS DE ECUACIONES DIFERENCIALES Entonces X p ΦtC t + Φ tct Al sustituir en X AX + F se tiene ΦtC t + Φ tct AΦtCt + F Como la solución general del sistema homogéneo es X ΦtC, entonces X Φ tc AX AΦtC, con lo que Φ t AΦt Se tiene, al sustituir en la ecuación de arriba, ΦtC t + AΦtCt AΦtCt + F de manera que ΦtC t F t, lo cual implica que C t Φ 1 tf t y, por tanto, Ct Φ 1 tf tdt Como X p ΦtCt, resulta X p Φt Φ 1 tf tdt La solución general del sistema X AX + F es entonces X X h + X p ΦtC + Φt Φ 1 tf tdt 12 SISTEMAS LINEALES HOMOGÉNEOS Describimos a continuación el modo de resolver un sistema homogéneo de primer orden con coeficientes constantes, X AX Se calculan la forma canónica de Jordan J de A y la matriz de paso P tales que P 1 AP J Se tiene A P JP 1 El siguiente paso es hacer el cambio de variable X P Y con Y y 1 y n y sustituir en la ecuación Se tiene P Y AP Y, esto es, Y P 1 AP Y con lo que la resolución del sistema X AX queda reducida a la resolución del nuevo y más simple sistema Y JY Una vez resuelto éste último, se deshace el cambio y se tiene la solución del sistema homogéneo original Desarrollaremos todo este proceso para el caso de los sistemas homogéneos planos dos ecuaciones Para sistemas con más ecuaciones el procedimiento es análogo 121 Sistemas lineales homogéneos planos Sea X AX un sistema lineal homogéneo de coeficientes constantes y plano

5 12 SISTEMAS LINEALES HOMOGÉNEOS 5 Caso 1 Si la matriz A M 2 R es diagonalizable con autovalores reales, la forma canónica de jordan de A es λ1 J λ 2 Se hace el cambio X P Y y se resuelve el sistema Y JY y 1 y 2 λ1 λ 2 y1 y 2 Resulta y 1 t c 1 e λ 1t, y 2 t e λ 2t Escrito en forma matricial, Y y1 t y 2 t c 1 e λ 1 t + e λ 2t e λ 1 t e λ 2t Al deshacer el cambio X P Y, se tiene siendo p11 p 21 X y x1 t x 2 t P c 1 e λ 1t p11 p 21 p12 p 22 e λ 1 t e λ 2t + e λ 2t p12 p 22 las columnas de P, esto es, los autovectores asociados a los autovalores λ 1 y λ 2 respectivamente Obsérvese que la matriz Φt P es una matriz fundamental e λ 1 t e λ 2t Caso 2 Si la matriz A no es diagonalizable, con un autovalor doble λ R, entonces J λ 1 λ Se considera X P Y y se resuelve el sistema Y JY Queda y 2 t e

6 6 1 SISTEMAS DE ECUACIONES DIFERENCIALES Al sustituir en y 1 λy 1 + y 2 se tiene y 1 λy 1 + e Esta ecuación, para cada valor de fijo, es lineal de primer orden Al resolver, da lugar a y 1 t c 1 e + te Por tanto, escrito en forma matricial, Y y1 t y 2 t c 1 e + te e e te e Se deshace el cambio X P Y y queda e te X P e [ e p11 c 1 + t p 21 + p12 p 22 ] e te La matriz Φt P e es una matriz fundamental Caso 3 Si la matriz A tiene dos autovalores complejos conjugados λ a + ib, λ a ib, la forma canónica de Jordan es la matriz J λ λ M 2 C La matriz de paso P P 1 P 2 M 2 C tiene por columnas P 1, P 2 P 1 a los autovectores complejos conjugados asociados a los autovalores λ y λ Se hace el cambio X P Y y se resuelve el sistema Y JY Se obtiene y 1 t c 1 e a+ibt, y 2 t e a ibt con c 1, C constantes arbitrarias Escrito en forma matricial, Y y1 t y 2 t e a+ibt e a ibt Deshaciendo el cambio, obtenemos X x1 t x 2 t P e a+ibt e a ibt

7 12 SISTEMAS LINEALES HOMOGÉNEOS 7 c 1 e a+ibt P 1 + e a ibt P 1 que es la solución general compleja del sistema X AX Nosotros deseamos encontrar la solución general real las funciones x 1 t, x 2 t deben ser reales Para obtenerla, basta observar que si Xt es solución compleja del sistema X AX, entonces ReXt e ImXt son p11 u1 + iv 1, soluciones reales de X AX Si P 1 se tiene ReP 1 u1 y ImP 1 solución compleja e a+ibt P 1 e at u1 cos bt + i sen bt e cos at u1 bt +ie sen at u1 bt Por lo dicho arriba, tanto como X 1 t e cos at u1 bt X 2 t e sen at u1 bt p 21 sen bt + cos bt + iv 2 Consideremos la + i + sen bt + cos bt son soluciones reales e independientes del sistema X AX, de modo que la solución general será u1 v X c 1 X 1 + X 2 1 e at cos bt e at sen bt e at sen bt e at cos bt Obsérvese que la matriz u1 v Q 1 ReP 1 ImP 1 a b es la matriz de paso tal que Q 1 AQ J, siendo J b a forma canónica real de A la

8 8 1 SISTEMAS DE ECUACIONES DIFERENCIALES En cualquiera de los tres casos, si los dos autovalores de la matriz A son tales que Reλ <, se tiene que lím x it, i 1, 2 t x1 t para cualquier solución X del sistema X x 2 t AX Observación 1 Considérese una ecuación lineal de segundo orden homogénea de coeficientes constantes x + a 1 x + a 2 x con a 1, a 2 R Mediante el cambio de variables { x x1 x x 2 se puede reducir el estudio de las soluciones de la ecuación al estudio del sistema plano equivalente 1 { x 1 x 2 x 2 a 2 x 1 a 1 x 2 ó x 1 1 x1 a 2 a 1 1 El polinomio característico de A es pλ λ a 2 a 2 + a 1 λ + 1 a 2 Obsérvese la relación existente entre el polinomio pλ y la ecuación de segundo orden Utilizando lo hecho en los sistemas planos, y teniendo en cuenta que sólo nos interesa x 1 t, se concluye que: Caso 1 Si los dos autovalores λ 1, λ 2 son reales y distintos, ya que de ser iguales la matriz A debería ser diagonal, entonces xt x 1 t k 1 e λ 1t + k 2 e λ 2t, siendo k 1 y k 2 constantes arbitrarias Caso 2 Si hay un autovalor real doble, λ, entonces xt x 1 t k 1 e + k 2 te, siendo k 1 y k 2 constantes arbitrarias Caso 3 Si los autovalores son complejos conjugados, entonces xt x 1 t k 1 e at cos bt + k 2 e at sen bt, siendo k 1 y k 2 constantes arbitrarias 122 Puntos críticos Diagrama de fases de sistemas lineales homogéneos planos Dado un sistema de ecuaciones del tipo { dx x 2 dt f 1 x, y dy dt f 2 x, y x 2

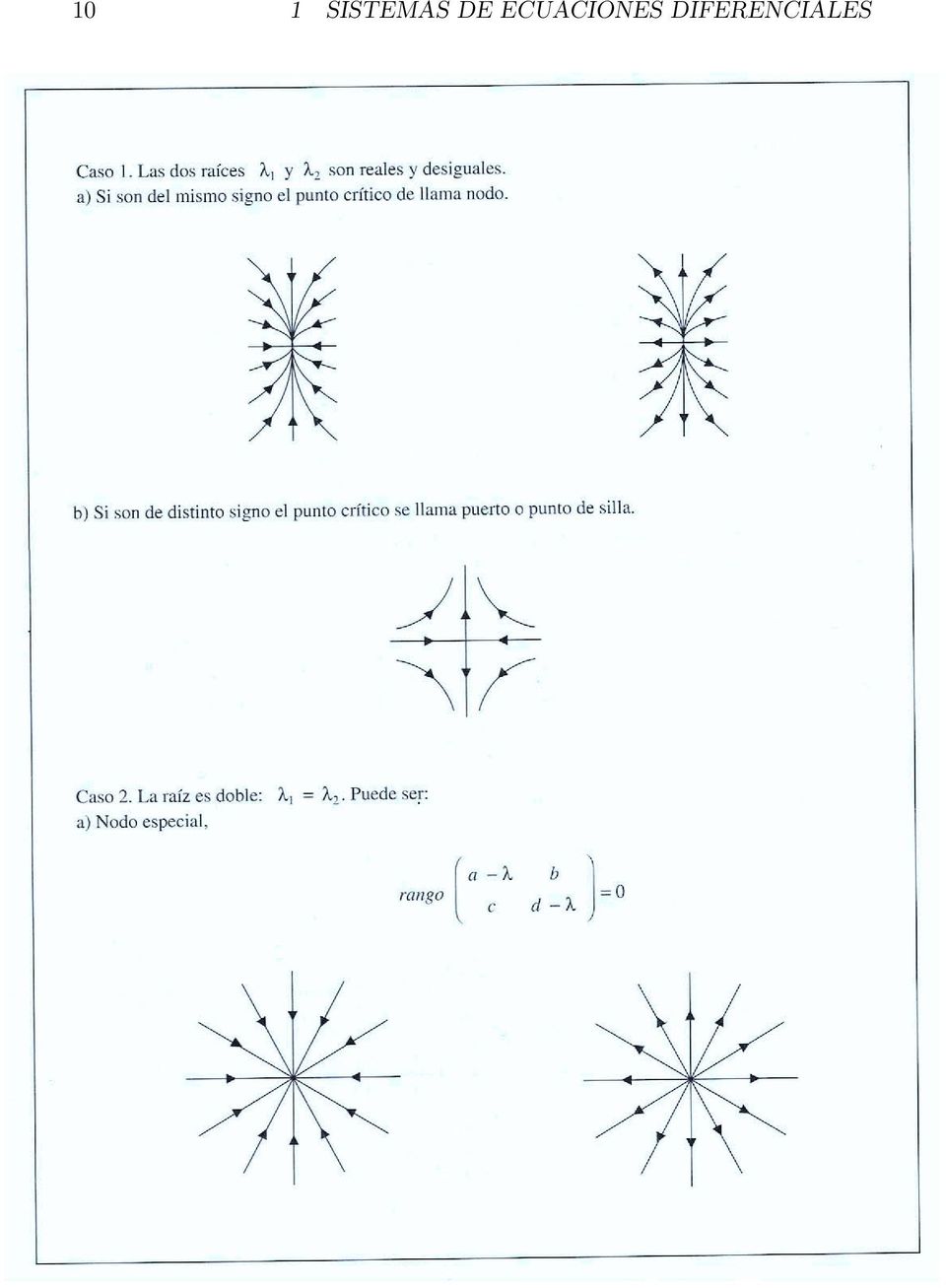
9 12 SISTEMAS LINEALES HOMOGÉNEOS 9 decimos que un punto x, y es un punto crítico o singular si el vector constante x Xt es solución del sistema La representación gráfica de las soluciones en el plano, junto con la indicación del sentido en que se recorren, se denomina diagrama de fases del sistema Dado el sistema X AX con A M 2 R, es claro que el vector X, es un punto crítico Supondremos que dicho punto crítico es aislado no hay más en un entorno suyo Esto implica que DetA y, por tanto, λ no es autovalor de A El análisis cualitativo de los diagramas de fases en un entorno del punto crítico X, se hace en función de los signos de los autovalores de A, tal como queda indicado en el siguiente esquema: y

10 1 1 SISTEMAS DE ECUACIONES DIFERENCIALES
11 12 SISTEMAS LINEALES HOMOGÉNEOS 11

Lección 11 Ecuaciones Diferenciales de Segundo Orden. Ecuaciones de segundo orden
 Lección 11 Ecuaciones Diferenciales de Segundo Orden 1 En forma normal: Ejemplo: Ecuaciones de segundo orden x = f (t, x, x ) 2tx x + 1 x = 0 x = (x ) 2 1 2tx Casos Particulares Ecuaciones en las que no
Lección 11 Ecuaciones Diferenciales de Segundo Orden 1 En forma normal: Ejemplo: Ecuaciones de segundo orden x = f (t, x, x ) 2tx x + 1 x = 0 x = (x ) 2 1 2tx Casos Particulares Ecuaciones en las que no
TEMA 11. Autovalores y autovectores. Diagonalización y formas canónicas.
 TEMA 11 F MATEMÁTICOS TEMA 11 Autovalores y autovectores Diagonalización y formas canónicas 1 Introducción Definición 1 (Matrices semejantes) Sean A y B dos matrices cuadradas de orden n Decimos que A
TEMA 11 F MATEMÁTICOS TEMA 11 Autovalores y autovectores Diagonalización y formas canónicas 1 Introducción Definición 1 (Matrices semejantes) Sean A y B dos matrices cuadradas de orden n Decimos que A
Tema 5: Sistemas de Ecuaciones Lineales
 Tema 5: Sistemas de Ecuaciones Lineales Eva Ascarza-Mondragón Helio Catalán-Mogorrón Manuel Vega-Gordillo Índice 1 Definición 3 2 Solución de un sistema de ecuaciones lineales 4 21 Tipos de sistemas ecuaciones
Tema 5: Sistemas de Ecuaciones Lineales Eva Ascarza-Mondragón Helio Catalán-Mogorrón Manuel Vega-Gordillo Índice 1 Definición 3 2 Solución de un sistema de ecuaciones lineales 4 21 Tipos de sistemas ecuaciones
Matrices, determinantes, sistemas de ecuaciones lineales.
 UNIVERSIDAD DE MURCIA Departamento de Matemáticas Óptica y Optometría Resúmenes Curso 2007-2008 Matrices, determinantes, sistemas de ecuaciones lineales. Una matriz A de orden m n es una colección de m
UNIVERSIDAD DE MURCIA Departamento de Matemáticas Óptica y Optometría Resúmenes Curso 2007-2008 Matrices, determinantes, sistemas de ecuaciones lineales. Una matriz A de orden m n es una colección de m
Ecuaciones diferenciales lineales con coeficientes constantes
 Tema 4 Ecuaciones diferenciales lineales con coeficientes constantes Una ecuación diferencial lineal de orden n tiene la forma a 0 (x)y (n) + a 1 (x)y (n 1) + + a n 1 (x)y + a n (x)y = b(x) (41) Vamos
Tema 4 Ecuaciones diferenciales lineales con coeficientes constantes Una ecuación diferencial lineal de orden n tiene la forma a 0 (x)y (n) + a 1 (x)y (n 1) + + a n 1 (x)y + a n (x)y = b(x) (41) Vamos
1. DIFERENCIABILIDAD EN VARIAS VARIABLES
 1 1. DIFERENCIABILIDAD EN VARIAS VARIABLES 1.1. DERIVADAS DIRECCIONALES Y PARCIALES Definición 1.1. Sea f : R n R, ā R n y v R n. Se define la derivada direccional de f en ā y en la dirección de v como:
1 1. DIFERENCIABILIDAD EN VARIAS VARIABLES 1.1. DERIVADAS DIRECCIONALES Y PARCIALES Definición 1.1. Sea f : R n R, ā R n y v R n. Se define la derivada direccional de f en ā y en la dirección de v como:
Diagonalización de matrices.
 Diagonalización de matrices. 1. Diagonalización de matrices. Definición 1.1 Sea A una matriz cuadrada,, decimos que es un autovalor de A si existe un vector no nulo tal que En esta situación decimos que
Diagonalización de matrices. 1. Diagonalización de matrices. Definición 1.1 Sea A una matriz cuadrada,, decimos que es un autovalor de A si existe un vector no nulo tal que En esta situación decimos que
MATEMÁTICAS ESPECIALES II PRÁCTICA 5 Parte I - Sistemas de ecuaciones diferenciales de primer orden.
 MATEMÁTICAS ESPECIALES II - 8 PRÁCTICA 5 Parte I - Sistemas de ecuaciones diferenciales de primer orden. Considere el sistema de ecuaciones diferenciales ordinarias (EDOs) de primer orden dx dt = f (t,
MATEMÁTICAS ESPECIALES II - 8 PRÁCTICA 5 Parte I - Sistemas de ecuaciones diferenciales de primer orden. Considere el sistema de ecuaciones diferenciales ordinarias (EDOs) de primer orden dx dt = f (t,
Escola Tècnica Superior d Enginyers de Camins, Canals i Ports AMPLIACIÓ DE MATEMÀTIQUES Q2 ENGINYERIA CAMINS. 8 de Maig de 2009. (t) = ax(t) + by(t),
 = ax(t) + by(t),") Escola Tècnica Superior d Enginyers de Camins, Canals i Ports AMPLIACIÓ DE MATEMÀTIQUES Q ENGINYERIA CAMINS 8 de Maig de 9 Problema. Dados a, b R determinar todas las funciones x, y, z C (R) que satisfacen
Escola Tècnica Superior d Enginyers de Camins, Canals i Ports AMPLIACIÓ DE MATEMÀTIQUES Q ENGINYERIA CAMINS 8 de Maig de 9 Problema. Dados a, b R determinar todas las funciones x, y, z C (R) que satisfacen
Apéndice sobre ecuaciones diferenciales lineales
 Apéndice sobre ecuaciones diferenciales lineales Juan-Miguel Gracia 10 de febrero de 2008 Índice 2 Determinante wronskiano. Wronskiano de f 1 (t), f 2 (t),..., f n (t). Derivada de un determinante de funciones.
Apéndice sobre ecuaciones diferenciales lineales Juan-Miguel Gracia 10 de febrero de 2008 Índice 2 Determinante wronskiano. Wronskiano de f 1 (t), f 2 (t),..., f n (t). Derivada de un determinante de funciones.
Seno y coseno de una matriz
 Miscelánea Matemática 5 (200 29 40 SMM Seno y coseno de una matriz Rafael Prieto Curiel Instituto Tecnológico Autónomo de México ITAM rafaelprietocuriel@yahoocom Introducción En muchas áreas de las matemáticas
Miscelánea Matemática 5 (200 29 40 SMM Seno y coseno de una matriz Rafael Prieto Curiel Instituto Tecnológico Autónomo de México ITAM rafaelprietocuriel@yahoocom Introducción En muchas áreas de las matemáticas
Álgebra Lineal. Tema 5 Ecuaciones diferenciales lineales
 Álgebra Lineal. Tema 5 Dep. Matemática Aplicada. UMA Tasa relativa de crecimiento Si x(t representa alguna cantidad física como el volumen de una sustancia, la población de ciertas especies, o el número
Álgebra Lineal. Tema 5 Dep. Matemática Aplicada. UMA Tasa relativa de crecimiento Si x(t representa alguna cantidad física como el volumen de una sustancia, la población de ciertas especies, o el número
MENORES, COFACTORES Y DETERMINANTES
 MENORES, COFACTORES Y DETERMINANTES 1. Introducción. 2. Determinante de una matriz de 3 x 3. 3. Menores y cofactores. 4. Determinante de una matriz de n x n. 5. Matriz triangular. 6. Determinante de una
MENORES, COFACTORES Y DETERMINANTES 1. Introducción. 2. Determinante de una matriz de 3 x 3. 3. Menores y cofactores. 4. Determinante de una matriz de n x n. 5. Matriz triangular. 6. Determinante de una
Vectores y Matrices. Tema 3: Repaso de Álgebra Lineal Parte I. Contenidos
 Tema 3: Repaso de Álgebra Lineal Parte I Virginia Mazzone Contenidos Vectores y Matrices Bases y Ortonormailizaciòn Norma de Vectores Ecuaciones Lineales Algenraicas Ejercicios Vectores y Matrices Los
Tema 3: Repaso de Álgebra Lineal Parte I Virginia Mazzone Contenidos Vectores y Matrices Bases y Ortonormailizaciòn Norma de Vectores Ecuaciones Lineales Algenraicas Ejercicios Vectores y Matrices Los
Sistemas de Ecuaciones Diferenciales Ordinarias.
 E.E.I. CÁLCULO II Y ECUACIONES DIFERENCIALES Curso 2016-17 Lección 23 (Martes 25 abr 2017) Sistemas de Ecuaciones Diferenciales Ordinarias. 1. Observaciones generales sobre los sistemas de ecuaciones diferenciales
E.E.I. CÁLCULO II Y ECUACIONES DIFERENCIALES Curso 2016-17 Lección 23 (Martes 25 abr 2017) Sistemas de Ecuaciones Diferenciales Ordinarias. 1. Observaciones generales sobre los sistemas de ecuaciones diferenciales
Combinación lineal, Independencia Lineal, y Vectores que generan (Sección 6.3 pág. 291)
") Combinación lineal, Independencia Lineal, y Vectores que generan (Sección 6.3 pág. 291) I. Combinación Lineal Definición: Sean v 1, v 2, v 3,, v n vectores en el espacio vectorial V. Entonces cualquier
Combinación lineal, Independencia Lineal, y Vectores que generan (Sección 6.3 pág. 291) I. Combinación Lineal Definición: Sean v 1, v 2, v 3,, v n vectores en el espacio vectorial V. Entonces cualquier
Ejemplo 1. Ejemplo introductorio
 . -Jordan. Ejemplo 1. Ejemplo introductorio. -Jordan Dos especies de insectos se crían juntas en un recipiente de laboratorio. Todos los días se les proporcionan dos tipos de alimento A y B. 1 individuo
. -Jordan. Ejemplo 1. Ejemplo introductorio. -Jordan Dos especies de insectos se crían juntas en un recipiente de laboratorio. Todos los días se les proporcionan dos tipos de alimento A y B. 1 individuo
Sistemas de Ecuaciones Diferenciales
 Lección 8 Sistemas de ecuaciones diferenciales lineales 1 Sistemas de Ecuaciones Diferenciales Consideremos el sistema A + S X + S k 1 k 2 Inicialmente se añaden 2 moles de S y 1 mol de A d[a] dt = k 1
Lección 8 Sistemas de ecuaciones diferenciales lineales 1 Sistemas de Ecuaciones Diferenciales Consideremos el sistema A + S X + S k 1 k 2 Inicialmente se añaden 2 moles de S y 1 mol de A d[a] dt = k 1
SISTEMAS DE ECUACIONES LINEALES
 1 SISTEMAS DE ECUACIONES LINEALES Una ecuación es un enunciado o proposición que plantea la igualdad de dos expresiones, donde al menos una de ellas contiene cantidades desconocidas llamadas variables
1 SISTEMAS DE ECUACIONES LINEALES Una ecuación es un enunciado o proposición que plantea la igualdad de dos expresiones, donde al menos una de ellas contiene cantidades desconocidas llamadas variables
Matemática C-C1 Algebra Lineal. Aplicaciones Tema: Sistemas de Ecuaciones Diferenciales Lineales
 Matemática C-C1 Algebra Lineal. Aplicaciones Tema: Sistemas de Ecuaciones Diferenciales Lineales Año 2007 1 Guia de clases: Clase 1: Introducción. Sistemas de Ecuaciones Diferenciales Lineales homogéneos.
Matemática C-C1 Algebra Lineal. Aplicaciones Tema: Sistemas de Ecuaciones Diferenciales Lineales Año 2007 1 Guia de clases: Clase 1: Introducción. Sistemas de Ecuaciones Diferenciales Lineales homogéneos.
1 Aplicaciones lineales
 UNIVERSIDAD POLITÉCNICA DE CARTAGENA Departamento de Matemática Aplicada y Estadística Aplicaciones lineales y diagonalización. El objetivo principal de este tema será la obtención de una matriz diagonal
UNIVERSIDAD POLITÉCNICA DE CARTAGENA Departamento de Matemática Aplicada y Estadística Aplicaciones lineales y diagonalización. El objetivo principal de este tema será la obtención de una matriz diagonal
Ecuaciones diferenciales de orden superior
 Tema 6 Ecuaciones diferenciales de orden superior Es frecuente, en numerosos problemas de mecánica o teoría de circuitos eléctricos, que las ecuaciones que rigen los procesos sean de orden mayor que uno.
Tema 6 Ecuaciones diferenciales de orden superior Es frecuente, en numerosos problemas de mecánica o teoría de circuitos eléctricos, que las ecuaciones que rigen los procesos sean de orden mayor que uno.
CAPÍTULO 3: DETERMINANTES Y SISTEMAS DE ECUACIONES
 CAPÍTULO 3: DETERMINANTES Y SISTEMAS DE ECUACIONES Parte A: determinantes. A.1- Definición. Por simplificar, consideraremos que a cada matriz cuadrada se le asocia un número llamado determinante que se
CAPÍTULO 3: DETERMINANTES Y SISTEMAS DE ECUACIONES Parte A: determinantes. A.1- Definición. Por simplificar, consideraremos que a cada matriz cuadrada se le asocia un número llamado determinante que se
Sistemas de ecuaciones lineales
 Sistemas de ecuaciones lineales Este tema resulta fundamental en la mayoría de las disciplinas, ya que son muchos los problemas científicos y de la vida cotidiana que requieren resolver simultáneamente
Sistemas de ecuaciones lineales Este tema resulta fundamental en la mayoría de las disciplinas, ya que son muchos los problemas científicos y de la vida cotidiana que requieren resolver simultáneamente
Tema 2. Sistemas de ecuaciones lineales
 Tema 2. Sistemas de ecuaciones lineales Estructura del tema. Definiciones básicas Forma matricial de un sistema de ecuaciones lineales Clasificación de los sistemas según el número de soluciones. Teorema
Tema 2. Sistemas de ecuaciones lineales Estructura del tema. Definiciones básicas Forma matricial de un sistema de ecuaciones lineales Clasificación de los sistemas según el número de soluciones. Teorema
Apéndice sobre ecuaciones diferenciales lineales
 Apéndice sobre ecuaciones diferenciales lineales Juan-Miguel Gracia 10 de febrero de 2008 Índice 1. Determinante wronskiano 2 1.1. Wronskiano de f 1 (t), f 2 (t),..., f n (t)............... 3 1.2. Derivada
Apéndice sobre ecuaciones diferenciales lineales Juan-Miguel Gracia 10 de febrero de 2008 Índice 1. Determinante wronskiano 2 1.1. Wronskiano de f 1 (t), f 2 (t),..., f n (t)............... 3 1.2. Derivada
Anexo C. Introducción a las series de potencias. Series de potencias
 Anexo C Introducción a las series de potencias Este apéndice tiene como objetivo repasar los conceptos relativos a las series de potencias y al desarrollo de una función ne serie de potencias en torno
Anexo C Introducción a las series de potencias Este apéndice tiene como objetivo repasar los conceptos relativos a las series de potencias y al desarrollo de una función ne serie de potencias en torno
14 Sistemas lineales de ecuaciones diferenciales con coeficientes
 Miguel Reyes, Dpto. de Matemática Aplicada, FI-UPM 1 14 Sistemas lineales de ecuaciones diferenciales con coeficientes constantes 14.1 Definición Se llama sistema lineal con coeficientes constantes al
Miguel Reyes, Dpto. de Matemática Aplicada, FI-UPM 1 14 Sistemas lineales de ecuaciones diferenciales con coeficientes constantes 14.1 Definición Se llama sistema lineal con coeficientes constantes al
1. PRODUCTO ESCALAR. ESPACIO EUCLÍDEO
 1 1. PRODUCTO ESCALAR. ESPACIO EUCLÍDEO Muchos de los fenómenos que se investigan en la geometría utilizan nociones como las de longitud de un vector y ángulo entre vectores. Para introducir estos dos
1 1. PRODUCTO ESCALAR. ESPACIO EUCLÍDEO Muchos de los fenómenos que se investigan en la geometría utilizan nociones como las de longitud de un vector y ángulo entre vectores. Para introducir estos dos
Curvas en paramétricas y polares
 Capítulo 10 Curvas en paramétricas y polares Introducción Después del estudio detallado de funciones reales de variable real expresadas en forma explícita y con coordenadas cartesianas, que se ha hecho
Capítulo 10 Curvas en paramétricas y polares Introducción Después del estudio detallado de funciones reales de variable real expresadas en forma explícita y con coordenadas cartesianas, que se ha hecho
3. Sistemas de n ecuaciones diferenciales lineales de primer orden
 Dpto Matemática Aplicada, Facultad de Informática, UPM EDO Sistemas Lineales 1 3 Sistemas de n ecuaciones diferenciales lineales de primer orden Se define un sistema de ecuaciones diferenciales lineales
Dpto Matemática Aplicada, Facultad de Informática, UPM EDO Sistemas Lineales 1 3 Sistemas de n ecuaciones diferenciales lineales de primer orden Se define un sistema de ecuaciones diferenciales lineales
Tema 1. Álgebra lineal. Matrices
 1 Tema 1. Álgebra lineal. Matrices 0.1 Introducción Los sistemas de ecuaciones lineales aparecen en un gran número de situaciones. Son conocidos los métodos de resolución de los mismos cuando tienen dos
1 Tema 1. Álgebra lineal. Matrices 0.1 Introducción Los sistemas de ecuaciones lineales aparecen en un gran número de situaciones. Son conocidos los métodos de resolución de los mismos cuando tienen dos
TEMA 4.- SISTEMAS DE ECUACIONES DIFERENCIALES ORDINARIAS
 TEMA 4- SISTEMAS DE ECUACIONES DIFERENCIALES ORDINARIAS 41 - Introducción Denición: Un sistema de ecuaciones diferenciales de primer orden en el que sus derivadas estén dadas explícitamente se puede expresar
TEMA 4- SISTEMAS DE ECUACIONES DIFERENCIALES ORDINARIAS 41 - Introducción Denición: Un sistema de ecuaciones diferenciales de primer orden en el que sus derivadas estén dadas explícitamente se puede expresar
x = A(t)x + b(t), (10.1)
x + b(t), (10.1)") Lección 0 Sistemas no homogéneos y Aplicaciones 0.. Introducción Los sistemas de ecuaciones diferenciales lineales no homogéneos son de la forma x = Atx + bt, 0. donde, para cada t, At es una matriz n
Lección 0 Sistemas no homogéneos y Aplicaciones 0.. Introducción Los sistemas de ecuaciones diferenciales lineales no homogéneos son de la forma x = Atx + bt, 0. donde, para cada t, At es una matriz n
Lección 11. Ecuaciones diferenciales de segundo orden. 11.1. Introducción
 Lección 11 Ecuaciones diferenciales de segundo orden 11.1. Introducción Posiblemente el ejemplo más característico de fenómeno físico cuyo modelización conduce a una ecuación lineal de segundo orden es
Lección 11 Ecuaciones diferenciales de segundo orden 11.1. Introducción Posiblemente el ejemplo más característico de fenómeno físico cuyo modelización conduce a una ecuación lineal de segundo orden es
Sistemas de ecuaciones lineales
 Sistemas de ecuaciones lineales 81 Introducción Denominamos sistema de ecuaciones a toda ecuación de la forma x (t) F ( t, x(t) ), (S) donde F : (a, b) R n R n La expresión anterior es muy general en el
Sistemas de ecuaciones lineales 81 Introducción Denominamos sistema de ecuaciones a toda ecuación de la forma x (t) F ( t, x(t) ), (S) donde F : (a, b) R n R n La expresión anterior es muy general en el
RESUMEN DEL TEMA 7 VALORES Y VECTORES PROPIOS
 RESUMEN DEL TEMA 7 VALORES Y VECTORES PROPIOS 1. Determinantes El determinante de una matriz cuadrada n n A = a 21 a 22 a 2n a n1 a n2 a nn es un número real, y se representa por: A = a 21 a 22 a 2n a
RESUMEN DEL TEMA 7 VALORES Y VECTORES PROPIOS 1. Determinantes El determinante de una matriz cuadrada n n A = a 21 a 22 a 2n a n1 a n2 a nn es un número real, y se representa por: A = a 21 a 22 a 2n a
TEMA 4: RESOLUCIÓN DE SISTEMAS MEDIANTE DETERMINANTES.
 TEMA 4 Ejercicios / 1 TEMA 4: RESOLUCIÓN DE SISTEMAS MEDIANTE DETERMINANTES. 1. Tenemos un sistema homogéneo de 5 ecuaciones y 3 incógnitas: a. Es posible que sea incompatible?. Por qué? b. Es posible
TEMA 4 Ejercicios / 1 TEMA 4: RESOLUCIÓN DE SISTEMAS MEDIANTE DETERMINANTES. 1. Tenemos un sistema homogéneo de 5 ecuaciones y 3 incógnitas: a. Es posible que sea incompatible?. Por qué? b. Es posible
Mat r i z in v e r s a
 Unidad 2 Método de GaUss Mat r i z in v e r s a M U lt i pli cat i va Objetivos: Al inalizar la unidad, el alumno: Representará un sistema de m ecuaciones lineales con n incógnitas mediante una matriz
Unidad 2 Método de GaUss Mat r i z in v e r s a M U lt i pli cat i va Objetivos: Al inalizar la unidad, el alumno: Representará un sistema de m ecuaciones lineales con n incógnitas mediante una matriz
λ = es simple se tiene que ( )
") Sección 6 Diagonalización 1- (enero 1-LE) Sea 1 1 = 1 1 a) Es diagonalizable la matriz? En caso afirmativo, calcula las matrices P y D tales que 1 P P = D b) Existe algún valor de a para el que ( 3, 6,
Sección 6 Diagonalización 1- (enero 1-LE) Sea 1 1 = 1 1 a) Es diagonalizable la matriz? En caso afirmativo, calcula las matrices P y D tales que 1 P P = D b) Existe algún valor de a para el que ( 3, 6,
Dependencia e independencia lineal
 CAPíTULO 3 Dependencia e independencia lineal En este capítulo estudiaremos tres conceptos de gran importancia para el desarrollo del álgebra lineal: el concepto de conjunto generador, el concepto de conjunto
CAPíTULO 3 Dependencia e independencia lineal En este capítulo estudiaremos tres conceptos de gran importancia para el desarrollo del álgebra lineal: el concepto de conjunto generador, el concepto de conjunto
Tema 9. Espacio de Estados : Representación y propiedades importantes
 Ingeniería de Control Tema 9. Espacio de Estados : Representación y propiedades importantes Daniel Rodríguez Ramírez Teodoro Alamo Cantarero Esquema del tema 9.1. Representación de sistemas discretos en
Ingeniería de Control Tema 9. Espacio de Estados : Representación y propiedades importantes Daniel Rodríguez Ramírez Teodoro Alamo Cantarero Esquema del tema 9.1. Representación de sistemas discretos en
Herramientas digitales de auto-aprendizaje para Matemáticas
 real de con Herramientas digitales de auto-aprendizaje para Matemáticas, Grupo de Innovación Didáctica Departamento de Matemáticas Universidad de Extremadura real de con Índice real de con real de con.
real de con Herramientas digitales de auto-aprendizaje para Matemáticas, Grupo de Innovación Didáctica Departamento de Matemáticas Universidad de Extremadura real de con Índice real de con real de con.
Autovalores y autovectores. Diagonalización y formas canónicas
 Capítulo 4 Autovalores y autovectores Diagonalización y formas canónicas Dado un homomorfismo, nos hemos planteado el problema de elegir bases cualesquiera de manera que la matriz del homomorfismo sea
Capítulo 4 Autovalores y autovectores Diagonalización y formas canónicas Dado un homomorfismo, nos hemos planteado el problema de elegir bases cualesquiera de manera que la matriz del homomorfismo sea
Funciones de varias variables
 Funciones de varias variables F. Alvarez y H. Lugo Universidad Complutense de Madrid 23 Noviembre, 2011 Campo escalar Denominamos campo escalar a una función f : R n R, es decir, una función cuyo dominio
Funciones de varias variables F. Alvarez y H. Lugo Universidad Complutense de Madrid 23 Noviembre, 2011 Campo escalar Denominamos campo escalar a una función f : R n R, es decir, una función cuyo dominio
E.T.S. Minas: Métodos Matemáticos Resumen y ejemplos Tema 9: Sistemas de EDOs lineales
 ETS Minas: Métodos Matemáticos Resumen y ejemplos Tema 9: Sistemas de EDOs lineales Francisco Palacios Escuela Politécnica Superior de Ingeniería de Manresa Universidad Politécnica de Cataluña Noviembre
ETS Minas: Métodos Matemáticos Resumen y ejemplos Tema 9: Sistemas de EDOs lineales Francisco Palacios Escuela Politécnica Superior de Ingeniería de Manresa Universidad Politécnica de Cataluña Noviembre
Espacio de estado.- el espacio n dimensional cuyos ejes de coordenadas consisten en el eje X1, X2... Xn y se denomina espacio de estado
 ANÁLII DE ITEMA DE CONTROL CON EL EPACIO DE ETADO La teoria de control clásica se basa en técnicas gráficas de tanteo y error mientras el control moderno es mas preciso Además se puede usar en sistemas
ANÁLII DE ITEMA DE CONTROL CON EL EPACIO DE ETADO La teoria de control clásica se basa en técnicas gráficas de tanteo y error mientras el control moderno es mas preciso Además se puede usar en sistemas
Sistemas de ecuaciones lineales 4
 4. SISTEMAS DE ECUACIONES LINEALES 4.1. DEFINICIONES Y CLASIFICACIÓN DE SISTEMAS. La ecuación de una recta en el plano tiene la forma ; su generalización a variables es:, y recibe el nombre de ecuación
4. SISTEMAS DE ECUACIONES LINEALES 4.1. DEFINICIONES Y CLASIFICACIÓN DE SISTEMAS. La ecuación de una recta en el plano tiene la forma ; su generalización a variables es:, y recibe el nombre de ecuación
Valores y Vectores Propios
 Valores y Vectores Propios Departamento de Matemáticas, CSI/ITESM de abril de 9 Índice 9.. Definiciones............................................... 9.. Determinación de los valores propios.................................
Valores y Vectores Propios Departamento de Matemáticas, CSI/ITESM de abril de 9 Índice 9.. Definiciones............................................... 9.. Determinación de los valores propios.................................
8. ESPACIOS VECTORIALES Y APLICACIONES LINEALES.
 Prácticas de Matemáticas I y Matemáticas II con DERIVE-5 6 8. ESPACIOS VECTORIALES Y APLICACIONES LINEALES. 8.. DEPENDENCIA E INDEPENDENCIA LINEAL DE VECTORES. COMBINACIÓN LINEAL. EJEMPLO 8.. Estudiar
Prácticas de Matemáticas I y Matemáticas II con DERIVE-5 6 8. ESPACIOS VECTORIALES Y APLICACIONES LINEALES. 8.. DEPENDENCIA E INDEPENDENCIA LINEAL DE VECTORES. COMBINACIÓN LINEAL. EJEMPLO 8.. Estudiar
Matriz sobre K = R o C de dimensión m n
 2 Matrices y Determinantes 21 Matrices Matriz sobre K = R o C de dimensión m n A = a 11 a 12 a 1n a 21 a 22 a 2n a m1 a m2 a mn Tipos de matrices: Cuadrada: n n = (a ij) i=1,,m j=1,,n Nula: (0) i,j 1 0
2 Matrices y Determinantes 21 Matrices Matriz sobre K = R o C de dimensión m n A = a 11 a 12 a 1n a 21 a 22 a 2n a m1 a m2 a mn Tipos de matrices: Cuadrada: n n = (a ij) i=1,,m j=1,,n Nula: (0) i,j 1 0
Capítulo 12. Sistemas de control
 Capítulo 12 Sistemas de control 1 Caso estacionario En un sistema de control el punto de equilibrio se determina resolviendo las ecuaciones que definen el sistema simultáneamente. Supondremos dos procesos
Capítulo 12 Sistemas de control 1 Caso estacionario En un sistema de control el punto de equilibrio se determina resolviendo las ecuaciones que definen el sistema simultáneamente. Supondremos dos procesos
ÁLGEBRA LINEAL. EXAMEN EXTRAORDINARIO 2 de julio de 2012 Duración del examen: 3 horas Fecha publicación notas: 11 de julio
 ÁLGEBRA LINEAL EXAMEN EXTRAORDINARIO 2 de julio de 22 Duración del examen: 3 horas Fecha publicación notas: de julio Fecha revisión examen: 3 de julio Apellidos: Nombre: Grupo: Titulación: ESCRIBA EL APELLIDO
ÁLGEBRA LINEAL EXAMEN EXTRAORDINARIO 2 de julio de 22 Duración del examen: 3 horas Fecha publicación notas: de julio Fecha revisión examen: 3 de julio Apellidos: Nombre: Grupo: Titulación: ESCRIBA EL APELLIDO
Analicemos ahora el siguiente ejemplo: (2x 4y) dx + (12y - 6x + 1) dy = 0. Será ésta una ecuación diferencial reducible a homogénea?
 dx + (12y - 6x + 1) dy = 0. Será ésta una ecuación diferencial reducible a homogénea?") 82 Analicemos ahora el siguiente ejemplo: (2x 4y) dx + (2y - 6x + ) dy = 0 Será ésta una ecuación diferencial reducible a homogénea? Si observamos la ecuación diferencial, tenemos que 2x 4y = 0 2y 6x +
82 Analicemos ahora el siguiente ejemplo: (2x 4y) dx + (2y - 6x + ) dy = 0 Será ésta una ecuación diferencial reducible a homogénea? Si observamos la ecuación diferencial, tenemos que 2x 4y = 0 2y 6x +
P. A. U. LAS PALMAS 2005
 P. A. U. LAS PALMAS 2005 OPCIÓN A: J U N I O 2005 1. Hallar el área encerrada por la gráfica de la función f(x) = x 3 4x 2 + 5x 2 y la rectas y = 0, x = 1 y x = 3. x 3 4x 2 + 5x 2 es una función polinómica
P. A. U. LAS PALMAS 2005 OPCIÓN A: J U N I O 2005 1. Hallar el área encerrada por la gráfica de la función f(x) = x 3 4x 2 + 5x 2 y la rectas y = 0, x = 1 y x = 3. x 3 4x 2 + 5x 2 es una función polinómica
2.- Sistemas de ecuaciones Lineales
 .- Sistemas de ecuaciones Lineales..- Definición, Clasificación de los sistemas lineales y tipos de solución. Definición Una ecuación lineal con las variables escribirse en la forma,..., n es una ecuación
.- Sistemas de ecuaciones Lineales..- Definición, Clasificación de los sistemas lineales y tipos de solución. Definición Una ecuación lineal con las variables escribirse en la forma,..., n es una ecuación
Superficies. Conceptos generales
 Repaso Superficies. Conceptos generales Dpto. Matemática Aplicada I E.T.S. de Arquitectura Universidad de Sevilla Curso 2005 2006 REPASO: Superficies. Conceptos generales 1. Conceptos generales Definición
Repaso Superficies. Conceptos generales Dpto. Matemática Aplicada I E.T.S. de Arquitectura Universidad de Sevilla Curso 2005 2006 REPASO: Superficies. Conceptos generales 1. Conceptos generales Definición
Tema 8 Ecuaciones diferenciales
 Tema 8 Ecuaciones diferenciales 1. ECUACIONES DIFERENCIALES ORDINARIAS Definición 1.1: Ecuación diferencial Se llama ecuación diferencial de orden n a una ecuación que relaciona la variable independiente
Tema 8 Ecuaciones diferenciales 1. ECUACIONES DIFERENCIALES ORDINARIAS Definición 1.1: Ecuación diferencial Se llama ecuación diferencial de orden n a una ecuación que relaciona la variable independiente
Sistemas de Ecuaciones Lineales
 Sistemas de Ecuaciones Lineales 1 Sistemas de ecuaciones y matrices Definición 1 Una ecuación lineal en las variables x 1, x 2,..., x n es una ecuación de la forma con a 1, a 2... y b números reales. a
Sistemas de Ecuaciones Lineales 1 Sistemas de ecuaciones y matrices Definición 1 Una ecuación lineal en las variables x 1, x 2,..., x n es una ecuación de la forma con a 1, a 2... y b números reales. a
Autovalores y autovectores Diagonalización y formas canónicas
 Autovalores y autovectores Diagonalización y formas canónicas Autovalores y autovectores.propiedades Sea V un espacio vectorial sobre K y f End(V ). Fijada una base de V, existirá una matriz cuadrada A,
Autovalores y autovectores Diagonalización y formas canónicas Autovalores y autovectores.propiedades Sea V un espacio vectorial sobre K y f End(V ). Fijada una base de V, existirá una matriz cuadrada A,
Tema 11.- Autovalores y Autovectores.
 Álgebra 004-005 Ingenieros Industriales Departamento de Matemática Aplicada II Universidad de Sevilla Tema - Autovalores y Autovectores Definición, propiedades e interpretación geométrica La ecuación característica
Álgebra 004-005 Ingenieros Industriales Departamento de Matemática Aplicada II Universidad de Sevilla Tema - Autovalores y Autovectores Definición, propiedades e interpretación geométrica La ecuación característica
Polinomios. 1.- Funciones cuadráticas
 Polinomios 1.- Funciones cuadráticas Definición 1 (Función polinomial) Sea n un entero no negativo y sean a n, a n 1,..., a, a 1, a 0 número s reales con a n 0. La función se denomina función polinomial
Polinomios 1.- Funciones cuadráticas Definición 1 (Función polinomial) Sea n un entero no negativo y sean a n, a n 1,..., a, a 1, a 0 número s reales con a n 0. La función se denomina función polinomial
Sistemas lineales de ecuaciones diferenciales. Juan-Miguel Gracia
 Sistemas lineales de ecuaciones diferenciales Juan-Miguel Gracia Índice Sistemas lineales 2 Búsqueda de una solución especial 3 Aplicación a sistemas 4 Problema de condiciones iniciales 2 / 2 Sistemas
Sistemas lineales de ecuaciones diferenciales Juan-Miguel Gracia Índice Sistemas lineales 2 Búsqueda de una solución especial 3 Aplicación a sistemas 4 Problema de condiciones iniciales 2 / 2 Sistemas
EJERCICIOS RESUELTOS DE INECUACIONES. Juan Jesús Pascual. Inecuaciones
 MATEMÁTICAS EJERCICIOS RESUELTOS DE INECUACIONES Juan Jesús Pascual Inecuaciones Índice ejercicios resueltos A. Inecuaciones lineales con una incógnita B. Inecuaciones de segundo grado con una incógnita
MATEMÁTICAS EJERCICIOS RESUELTOS DE INECUACIONES Juan Jesús Pascual Inecuaciones Índice ejercicios resueltos A. Inecuaciones lineales con una incógnita B. Inecuaciones de segundo grado con una incógnita
ÁLGEBRA LINEAL. EXAMEN FINAL 18 de Enero de b) (0, 5 puntos) Estudia si la siguiente afirmación es verdadera o falsa, justificando
 (0, 5 puntos) Estudia si la siguiente afirmación es verdadera o falsa, justificando") ÁLGEBRA LINEAL EXAMEN FINAL 8 de Enero de Apellidos y Nombre: Duración del examen: 3 horas Publicación de notas: enero Revisión de Examen: feb Ejercicio. ( puntos a (, puntos Estudia si la siguiente afirmación
ÁLGEBRA LINEAL EXAMEN FINAL 8 de Enero de Apellidos y Nombre: Duración del examen: 3 horas Publicación de notas: enero Revisión de Examen: feb Ejercicio. ( puntos a (, puntos Estudia si la siguiente afirmación
Ejercicio 1: Realiza las siguientes divisiones por el método tradicional y por Ruffini: a)
") Tema 2: Ecuaciones, Sistemas e Inecuaciones. 2.1 División de polinomios. Regla de Ruffini. Polinomio: Expresión algebraica formada por la suma y/o resta de varios monomios. Terminología: o Grado del polinomio:
Tema 2: Ecuaciones, Sistemas e Inecuaciones. 2.1 División de polinomios. Regla de Ruffini. Polinomio: Expresión algebraica formada por la suma y/o resta de varios monomios. Terminología: o Grado del polinomio:
Sistemas de ecuaciones lineales
 6 Sistemas de ecuaciones lineales 61 Sistemas de ecuaciones lineales Se llama ecuación lineal en n incógnitas sobre R a una expresión de la forma a 1 x 1 + a 2 x 2 + + a n x n = b con los a i en R para
6 Sistemas de ecuaciones lineales 61 Sistemas de ecuaciones lineales Se llama ecuación lineal en n incógnitas sobre R a una expresión de la forma a 1 x 1 + a 2 x 2 + + a n x n = b con los a i en R para
Aplicaciones Lineales. Diagonalización de matrices.
 Tema 2 Aplicaciones Lineales. Diagonalización de matrices. 2.1. Definiciones y propiedades Nota 2.1.1. En este tema trabajaremos con los Espacios Vectoriales R n y R m definidos sobre el cuerpo R. Definición
Tema 2 Aplicaciones Lineales. Diagonalización de matrices. 2.1. Definiciones y propiedades Nota 2.1.1. En este tema trabajaremos con los Espacios Vectoriales R n y R m definidos sobre el cuerpo R. Definición
Inversas Generalizadas
 Inversas Generalizadas Departamento de Matemáticas, CSI/IESM 5 de abril de 2 Índice.. Inversas generalizadas..........................................2. Uso de la inversa generalizada.....................................
Inversas Generalizadas Departamento de Matemáticas, CSI/IESM 5 de abril de 2 Índice.. Inversas generalizadas..........................................2. Uso de la inversa generalizada.....................................
Ecuaciones de segundo grado
 Ecuaciones de segundo grado 11 de noviembre 009 Ecuaciones de segundo grado con una incógnita método de solución, formula general e incompletas Algebra Ecuaciones de segundo grado con una incógnita Las
Ecuaciones de segundo grado 11 de noviembre 009 Ecuaciones de segundo grado con una incógnita método de solución, formula general e incompletas Algebra Ecuaciones de segundo grado con una incógnita Las
Combinación Lineal. Departamento de Matemáticas, CCIR/ITESM. 10 de enero de 2011
 Combinación Lineal Departamento de Matemáticas, CCIR/ITESM 10 de enero de 011 Índice.1. Introducción............................................... 1.. Combinación lineal entre vectores...................................
Combinación Lineal Departamento de Matemáticas, CCIR/ITESM 10 de enero de 011 Índice.1. Introducción............................................... 1.. Combinación lineal entre vectores...................................
Sistemas de Ecuaciones y Matrices
 Sistemas de Ecuaciones y Matrices 0.1 Sistemas de ecuaciones Consideremos las gráficas de dos funciones f y g como en la figura siguiente: P Q y = fx y = gx En la práctica, en ocasiones hay que encontrar
Sistemas de Ecuaciones y Matrices 0.1 Sistemas de ecuaciones Consideremos las gráficas de dos funciones f y g como en la figura siguiente: P Q y = fx y = gx En la práctica, en ocasiones hay que encontrar
1. DIAGONALIZACIÓN. FORMAS CANÓNICAS
 1 1. DIAGONALIZACIÓN. FORMAS CANÓNICAS 1. Se considera la matriz: A = ( 2 3 4 13 con coeficientes en R. Hallar los valores propios, los vectores propios y una matriz P que permita la diagonalización de
1 1. DIAGONALIZACIÓN. FORMAS CANÓNICAS 1. Se considera la matriz: A = ( 2 3 4 13 con coeficientes en R. Hallar los valores propios, los vectores propios y una matriz P que permita la diagonalización de
BLOQUE DE ÁLGEBRA: TEMA 1: MATRICES.
 BLOQUE DE ÁLGEBRA: TEMA 1: MATRICES. Matrices: Se llama matriz de dimensión m n a un conjunto de números reales dispuestos en m filas y n columnas de la siguiente forma: 11 a 12 a 13... a 1n A= a a 21
BLOQUE DE ÁLGEBRA: TEMA 1: MATRICES. Matrices: Se llama matriz de dimensión m n a un conjunto de números reales dispuestos en m filas y n columnas de la siguiente forma: 11 a 12 a 13... a 1n A= a a 21
Dada la proporción =, calcula el producto de extremos menos el producto de medios. 4. Halla los determinantes de las siguientes matrices: Solución:
 3 Determinantes. Determinantes de orden y 3 por Sarrus Piensa y calcula 3 6 Dada la proporción =, calcula el producto de extremos menos el producto de medios. 4 8 3 8 6 4 = 4 4 = 0 Aplica la teoría. Calcula
3 Determinantes. Determinantes de orden y 3 por Sarrus Piensa y calcula 3 6 Dada la proporción =, calcula el producto de extremos menos el producto de medios. 4 8 3 8 6 4 = 4 4 = 0 Aplica la teoría. Calcula
Lección 1. Algoritmos y conceptos básicos.
 Página 1 de 8 Lección 1. Algoritmos y conceptos básicos. Objetivos. La primera lección del curs está dedicada a repasar los conceptos y algoritmos del álgebra lineal, básicos para el estudio de la geometría
Página 1 de 8 Lección 1. Algoritmos y conceptos básicos. Objetivos. La primera lección del curs está dedicada a repasar los conceptos y algoritmos del álgebra lineal, básicos para el estudio de la geometría
Sistemas de Ecuaciones Lineales. Solución de Sistemas de Ecuaciones Lineales. www.math.com.mx. José de Jesús Angel Angel. jjaa@math.com.
 Sistemas de Ecuaciones Lineales Solución de Sistemas de Ecuaciones Lineales www.math.com.mx José de Jesús Angel Angel jjaa@math.com.mx MathCon c 2007-2008 Contenido 1. Sistemas de Ecuaciones Lineales 2
Sistemas de Ecuaciones Lineales Solución de Sistemas de Ecuaciones Lineales www.math.com.mx José de Jesús Angel Angel jjaa@math.com.mx MathCon c 2007-2008 Contenido 1. Sistemas de Ecuaciones Lineales 2
MATEMÁTICAS APLICADAS A LAS C.C. SOCIALES
 MATEMÁTICAS APLICADAS A LAS C.C. SOCIALES CAPÍTULO 1 Curso preparatorio de la prueba de acceso a la universidad para mayores de 25 años curso 2010/11 Nuria Torrado Robles Departamento de Estadística Universidad
MATEMÁTICAS APLICADAS A LAS C.C. SOCIALES CAPÍTULO 1 Curso preparatorio de la prueba de acceso a la universidad para mayores de 25 años curso 2010/11 Nuria Torrado Robles Departamento de Estadística Universidad
Sistemas de ecuaciones diferenciales lineales con coeficientes constantes
 Lección 9 Sistemas de ecuaciones diferenciales lineales con coeficientes constantes 9.. Introducción En esta lección estudiaremos una forma de obtener analíticamente las soluciones de los sistemas lineales
Lección 9 Sistemas de ecuaciones diferenciales lineales con coeficientes constantes 9.. Introducción En esta lección estudiaremos una forma de obtener analíticamente las soluciones de los sistemas lineales
Métodos Matemáticos 2 Ecuaciones Diferenciales de Orden Superior
 Métodos Matemáticos 2 Ecuaciones Diferenciales de Orden Superior L. A. Núñez * Centro de Astrofísica Teórica, Departamento de Física, Facultad de Ciencias, Universidad de Los Andes, Mérida 5101, Venezuela
Métodos Matemáticos 2 Ecuaciones Diferenciales de Orden Superior L. A. Núñez * Centro de Astrofísica Teórica, Departamento de Física, Facultad de Ciencias, Universidad de Los Andes, Mérida 5101, Venezuela
Tema 2. Aplicaciones lineales. Diagonalización de endomorfismos.
 Tema 2. Aplicaciones lineales. Diagonalización de endomorfismos. Álgebra Lineal Escuela Politécnica Superior Universidad de Málaga Emilio Muñoz-Velasco (Basado en los apuntes de Jesús Medina e Inmaculada
Tema 2. Aplicaciones lineales. Diagonalización de endomorfismos. Álgebra Lineal Escuela Politécnica Superior Universidad de Málaga Emilio Muñoz-Velasco (Basado en los apuntes de Jesús Medina e Inmaculada
Determinante de una matriz
 25 Matemáticas I : Preliminares Tema 3 Determinante de una matriz 31 Determinante de una matriz cuadrada Definición 67- Sea A una matriz cuadrada de orden n Llamaremos producto elemental en A al producto
25 Matemáticas I : Preliminares Tema 3 Determinante de una matriz 31 Determinante de una matriz cuadrada Definición 67- Sea A una matriz cuadrada de orden n Llamaremos producto elemental en A al producto
Clase 9 Sistemas de ecuaciones no lineales
 Clase 9 Instituto de Ciencias Básicas Facultad de Ingeniería Universidad Diego Portales Marzo, 2013 Problemas resueltos Problema 4: Considere el sistema de ecuaciones x y = 3 (x 2) 2 +y = 1 Problemas resueltos
Clase 9 Instituto de Ciencias Básicas Facultad de Ingeniería Universidad Diego Portales Marzo, 2013 Problemas resueltos Problema 4: Considere el sistema de ecuaciones x y = 3 (x 2) 2 +y = 1 Problemas resueltos
Curso de Álgebra Lineal
 Curso de Álgebra Lineal 1. NÚMEROS COMPLEJOS 1.1 Definición, origen y operaciones fundamentales con números complejos Definición. Un número complejo, z, es una pareja ordenada (a, b) de números reales
Curso de Álgebra Lineal 1. NÚMEROS COMPLEJOS 1.1 Definición, origen y operaciones fundamentales con números complejos Definición. Un número complejo, z, es una pareja ordenada (a, b) de números reales
λ autovalor / valor propio v autovector / vector propio
 1. INTRODUCCIÓN Problema estándar Problema generalizado CÁLCULO DE AUTOVALORES λ autovalor / valor propio v autovector / vector propio Laboratori de Càlcul Numèric (LaCàN) Departament de Matemàtica Aplicada
1. INTRODUCCIÓN Problema estándar Problema generalizado CÁLCULO DE AUTOVALORES λ autovalor / valor propio v autovector / vector propio Laboratori de Càlcul Numèric (LaCàN) Departament de Matemàtica Aplicada
Matemática Avanzada. Clase Nro. 15
 Matemática Avanzada Clase Nro. 15 Octavio Miloni Facultad de Cs. Astronómicas y Geofísicas - Universidad Nacional de La Plata 1 / 23 Definiciones Previas y Métodos Elementales de de Resolución de Ecuaciones
Matemática Avanzada Clase Nro. 15 Octavio Miloni Facultad de Cs. Astronómicas y Geofísicas - Universidad Nacional de La Plata 1 / 23 Definiciones Previas y Métodos Elementales de de Resolución de Ecuaciones
Tema 5: Diagonalización de matrices
 Tema 5: Diagonalización de matrices La intención en este tema es dada una matriz cuadrada ver si existe otra matriz semejante a ella que sea diagonal Recordemos (ver Tema : Matrices determinantes y sistemas
Tema 5: Diagonalización de matrices La intención en este tema es dada una matriz cuadrada ver si existe otra matriz semejante a ella que sea diagonal Recordemos (ver Tema : Matrices determinantes y sistemas
Práctica 5. Autovalores y autovectores. Diagonalización de matrices y de transformaciones lineales.
 Práctica 5 Autovalores y autovectores Diagonalización de matrices y de transformaciones lineales Nota: salvo indicación particular, se considera que todas las matrices pertenecen a C n n 1 Encuentre los
Práctica 5 Autovalores y autovectores Diagonalización de matrices y de transformaciones lineales Nota: salvo indicación particular, se considera que todas las matrices pertenecen a C n n 1 Encuentre los
Ejercicios de ECUACIONES DIFERENCIALES ORDINARIAS
 Ejercicios de ECUACIONES DIFERENCIALES ORDINARIAS Grado en Matemáticas Curso 203-204 . Ecuaciones lineales con coeficientes constantes Ecuaciones de primer orden. Encontrar la solución de los siguientes
Ejercicios de ECUACIONES DIFERENCIALES ORDINARIAS Grado en Matemáticas Curso 203-204 . Ecuaciones lineales con coeficientes constantes Ecuaciones de primer orden. Encontrar la solución de los siguientes
1. Ecuaciones lineales con coeficientes constantes. Ecuaciones de primer orden. 2. Encontrar la solución de los siguientes problemas de valor inicial.
 . Ecuaciones lineales con coeficientes constantes Ecuaciones de primer orden. Encontrar la solución de los siguientes problemas de valor inicial. ẋ =5x, x0) =.. ẋ + x =0, x) =.. ẋ + x = te t, x0) =. si
. Ecuaciones lineales con coeficientes constantes Ecuaciones de primer orden. Encontrar la solución de los siguientes problemas de valor inicial. ẋ =5x, x0) =.. ẋ + x =0, x) =.. ẋ + x = te t, x0) =. si
Forma canónica de Jordan.
 Práctica 3 Forma canónica de Jordan. Contenido: Matrices semejantes. Polinomio característico. Valores propios. Vectores propios. Forma canónica de Jordan. Forma real de la forma canónica de Jordan. Aplicaciones:
Práctica 3 Forma canónica de Jordan. Contenido: Matrices semejantes. Polinomio característico. Valores propios. Vectores propios. Forma canónica de Jordan. Forma real de la forma canónica de Jordan. Aplicaciones:
IES Francisco Ayala Modelo 1 (Septiembre) de 2007 Solución Germán Jesús Rubio Luna. Opción A
 de 2007 Solución Germán Jesús Rubio Luna. Opción A") IES Francisco Ayala Modelo (Septiembre) de 7 Germán Jesús Rubio Luna Opción A Ejercicio n de la opción A de septiembre, modelo de 7 3x+ Sea f: (,+ ) R la función definida por f(x)= x. [ 5 puntos] Determina
IES Francisco Ayala Modelo (Septiembre) de 7 Germán Jesús Rubio Luna Opción A Ejercicio n de la opción A de septiembre, modelo de 7 3x+ Sea f: (,+ ) R la función definida por f(x)= x. [ 5 puntos] Determina
Consideremos un sistema de ED lineales que involucra n funciones escalares
 Práctica 3 Sistemas de ecuaciones diferenciales lineales 3 Introducción Consideremos un sistema de ED lineales que involucra n funciones escalares y (x),,y n (x), dependientes de la variable x en su forma
Práctica 3 Sistemas de ecuaciones diferenciales lineales 3 Introducción Consideremos un sistema de ED lineales que involucra n funciones escalares y (x),,y n (x), dependientes de la variable x en su forma
En el siguiente capítulo se hará un repaso de algunas propiedades básicas de conjuntos convexos, para después explicar el método simplex.
 Capitulo 2 Método Simplex Para explicar el método de generación de columnas se explicaran a continuación conceptos básicos de la programación lineal y el método simplex. En especial, el concepto de costo
Capitulo 2 Método Simplex Para explicar el método de generación de columnas se explicaran a continuación conceptos básicos de la programación lineal y el método simplex. En especial, el concepto de costo
MAT-207 ECUACIONES DIFERENCIALES Ing. Magalí Cascales CONTENIDO UNIDAD #2 ECUACIONES DIFERENCIALES DE PRIMER ORDEN
 MAT-07 ECUACIONES DIFERENCIALES Ing. Magalí Cascales CONTENIDO UNIDAD #1 ECUACIONES DIFERENCIALES 1. Definición. Solución de una Ecuación Diferencial. Clasificación UNIDAD # ECUACIONES DIFERENCIALES DE
MAT-07 ECUACIONES DIFERENCIALES Ing. Magalí Cascales CONTENIDO UNIDAD #1 ECUACIONES DIFERENCIALES 1. Definición. Solución de una Ecuación Diferencial. Clasificación UNIDAD # ECUACIONES DIFERENCIALES DE
Sistemas de Ecuaciones Diferenciales
 Semana 8 - Clase 5// Tema 4: Sistemas y Series Sistemas de Ecuaciones Diferenciales Cuando consideramos la evolución de sistemas con varios grados de libertad o con varias partículas, naturalmente arribamos
Semana 8 - Clase 5// Tema 4: Sistemas y Series Sistemas de Ecuaciones Diferenciales Cuando consideramos la evolución de sistemas con varios grados de libertad o con varias partículas, naturalmente arribamos
Examen de Junio de 2011 (Común) con soluciones (Modelo )
 con soluciones (Modelo )") Opción A Junio 011 común ejercicio 1 opción A ['5 puntos] Se desea construir un depósito cilíndrico cerrado de área total igual a 54 m. Determina el radio de la base y la altura del cilindro para que éste
Opción A Junio 011 común ejercicio 1 opción A ['5 puntos] Se desea construir un depósito cilíndrico cerrado de área total igual a 54 m. Determina el radio de la base y la altura del cilindro para que éste
Álgebra Lineal VII: Independencia Lineal.
 Álgebra Lineal VII: Independencia Lineal José María Rico Martínez Departamento de Ingeniería Mecánica División de Ingenierías, Campus Irapuato-Salamanca Universidad de Guanajuato email: jrico@salamancaugtomx
Álgebra Lineal VII: Independencia Lineal José María Rico Martínez Departamento de Ingeniería Mecánica División de Ingenierías, Campus Irapuato-Salamanca Universidad de Guanajuato email: jrico@salamancaugtomx