Redes bayesianas temporales para reconocimiento de escenarios
|
|
|
- Rosario Juárez Martin
- hace 7 años
- Vistas:
Transcripción
1 Redes bayesianas temporales para reconocimiento de escenarios Ahmed Ziani and Cina Motamed Visión de Alto Nivel Dr. Enrique Sucar Irvin Hussein López Nava Junio 2009

2 Introducción (1) Objetivo: aplicaciones de video-vigilancia Los escenarios dinámicos constan de eventos: espaciales, temporales e interacción. Reconocimiento automático: On-line: generar alarmas. Off-line: recuperación de comportamientos. 2

3 Introducción (2) Condiciones favorables de esta aplicación: los parámetros de la cámara y el fondo observado permanecen fijos. Etapas de un sistema de video-vigilancia: 1. Detección de movimiento 2. Etapa de seguimiento 3. Interpretación de movimiento de alto nivel 3

4 Introducción (3) Los principales objetivos son: observar la escena, indexar las actividades y reconocer los escenarios modelados. Los escenarios contienen trayectorias específicas espacio-temporal, interacción entre objetos estáticos y no estáticos, y una combinación de ambos. 4

5 Detección de movimiento (1) D k representa la decisión de detección: 1 = objeto en movimiento, 0 = fondo Procedimientos de limpieza: Morfológicas: erosión y dilatación. Eliminación de regiones de poco interés. 5

6 Detección de movimiento (2) 6

7 Seguimiento Parea las regiones detectadas de una secuencia temporal con otra teniendo en cuenta la fusión y división durante el movimiento de objetos. Este algoritmo cuenta con un mecanismo de detección de confianza (creencia) que incrementa cuando: El objeto sigue un camino continuo. El tamaño del objeto permanece estable. No hay ambigüedad. 7

8 Reconocimiento de Escenario Un escenario está compuesto de un conjunto de eventos elementales relacionados. Los escenarios de actividad humana presentan variabilidad. Para la estructura lógica de estos eventos: Petri-net Redes bayesianas Modelos ocultos de Markov 8

9 Redes bayesianas (1) Es un grafo acíclico dirigido donde: Los nodos representan variables y Los arcos representan relaciones de dependencia. Principales ventajas de las RB: La capacidad de representar conocimiento Eficiente estructura de inferencia para aplicaciones en TR. 9

10 Redes bayesianas (2) La probabilidad conjunta está representada por: El objetivo es estimar hipótesis Hi (i=1,,n) basados en la evidencia Xj 10
")
11 RB y Reconocimiento visual de Escenario Descripciones textuales en una dinámica de vehículos y peatones. Reconocer actividades en un partido de futbol americano. RBN s han sido utilizadas para reconocimiento de comportamiento humano. Categorías de Modelado: Enfoque time slice. DBN. Enfoque basado en eventos. TNBN, NIEDT 11


12 Modelo Propuesto (1) Capa de eventos atemporales Cada evento atemporal está representado por una red bayesiana jerárquica. 1. Nivel bajo = Xj, características visuales: posiciones, velocidad, dirección y tamaño de los objetos en seguimiento. 2. Nivel alto = Hi, decisión de reconocimiento de eventos. 12

13 Modelo Propuesto (2) Capa de razonamiento temporal Conjunto de redes bayesianas que contienen nodos asociados con información temporal. Evaluar cuantitativa y cualitativamente limitaciones temporales para cada evento y también estimar las relaciones entre eventos relacionados. Nivel bajo = tiempo de inicio (s) y fin (e) de los eventos Los datos son normalizados. 13


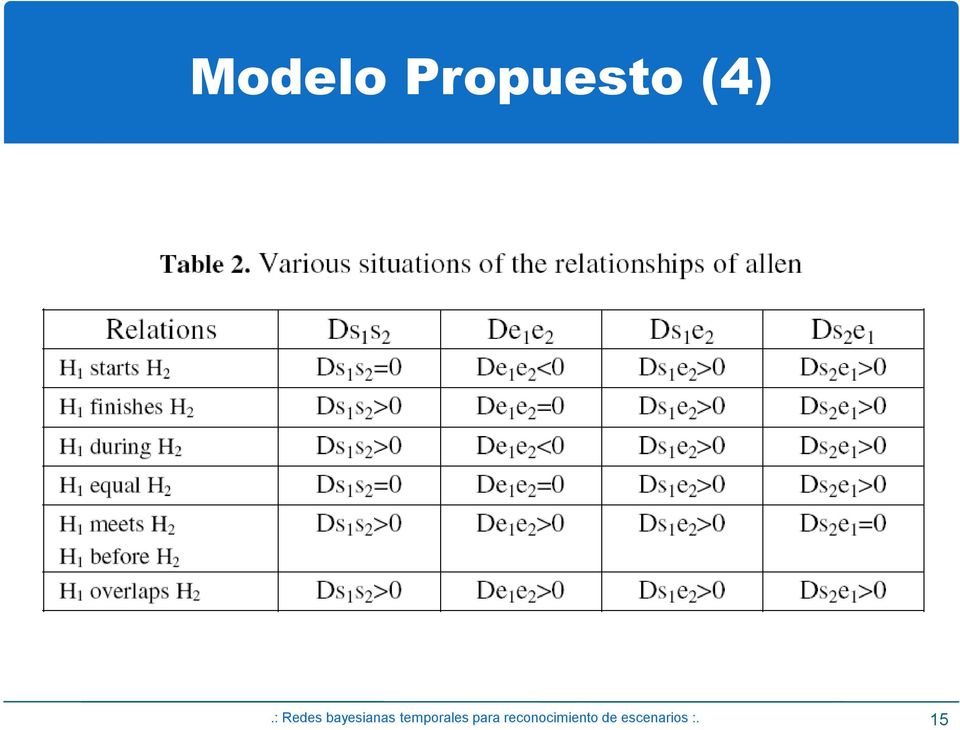
14 Modelo Propuesto (3) Se implementan las relaciones Allen para evaluar las relaciones temporales. 14

15 Modelo Propuesto (4) 15
16 Modelo Propuesto (5) Estructura general del modelo de escenario. 16

17 Modelo Propuesto (6) Modelo de escenario de una maleta abandonada. 17

18 Aprendizaje de Parámetros (1) Los parámetros de la red se pueden aprender a partir de los datos experimentales. Problemas en la vigilancia visual: No se tienen suficientes ocurrencias para cada escenario. Se tienen entradas con incertidumbre. Se puede utilizar el algoritmo expectation-maximitation. 18

19 Aprendizaje de Parámetros (2) 19

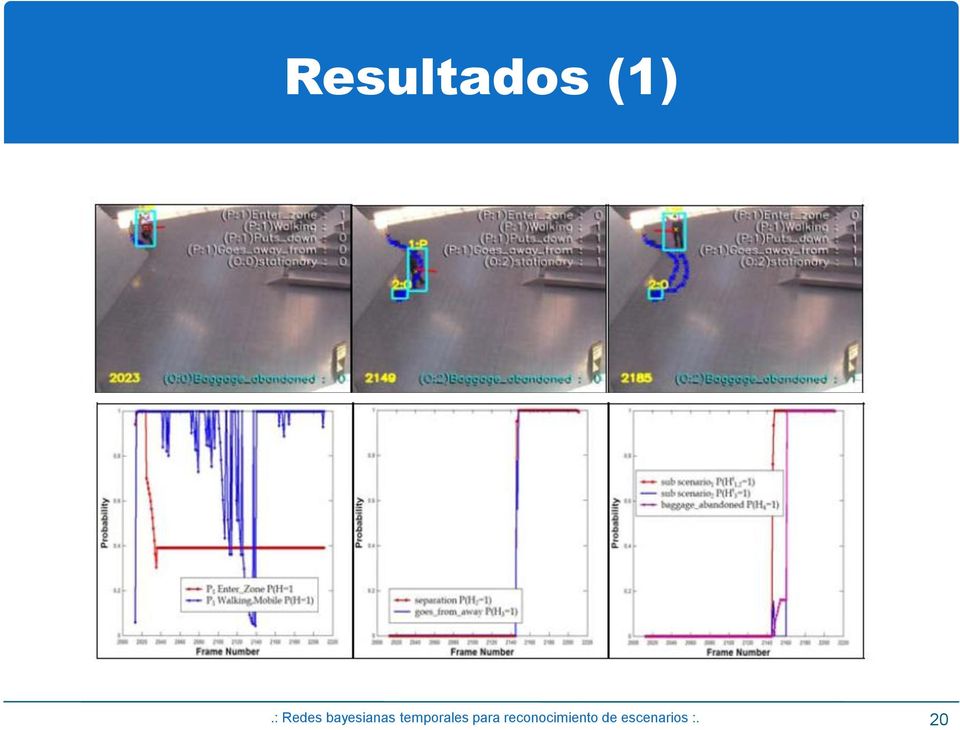
20 Resultados (1) 20
21 Resultados (2) 21
22 Conclusiones A FAVOR La aplicación propuesta es muy interesante, sobre todo la organización de la estructura EN CONTRA No detallan las pruebas de su aplicación. Los resultados están muy ligados al ambiente. 22
Predicción de potencia en el parque eólico de Villonaco, Loja, Ecuador. Alberto Reyes y Tania Guerrero INER Ecuador
 Predicción de potencia en el parque eólico de Villonaco, Loja, Ecuador Alberto Reyes y Tania Guerrero INER Ecuador INTRODUCCIÓN El comportamiento del viento presenta alto grado de aleatoriedad, incertidumbre
Predicción de potencia en el parque eólico de Villonaco, Loja, Ecuador Alberto Reyes y Tania Guerrero INER Ecuador INTRODUCCIÓN El comportamiento del viento presenta alto grado de aleatoriedad, incertidumbre
Índice general. Introducción... 23
 Índice general Introducción... 23 Parte I. Inteligencia Artificial 1. Conocimiento y Razonamiento... 33 1.1. Introducción... 33 1.2. Representaciones proposicionales... 34 1.3. Representaciones estructuradas...
Índice general Introducción... 23 Parte I. Inteligencia Artificial 1. Conocimiento y Razonamiento... 33 1.1. Introducción... 33 1.2. Representaciones proposicionales... 34 1.3. Representaciones estructuradas...
Sesión 8: Redes Bayesianas - Representación
 Modelos Gráficos Probabilistas L. Enrique Sucar INAOE Sesión 8: Redes Bayesianas - Representación La probabilidad no es realmente sobre números, es sobre la estructura del razonamiento [G. Shafer] Redes
Modelos Gráficos Probabilistas L. Enrique Sucar INAOE Sesión 8: Redes Bayesianas - Representación La probabilidad no es realmente sobre números, es sobre la estructura del razonamiento [G. Shafer] Redes
Sesión 14: Redes de Decisión
 Modelos Gráficos Probabilistas L. Enrique Sucar INAOE Sesión 14: Redes de Decisión un agente racional ideal es aquel que, para cada posible secuencia de percepciones, realiza la acción que maximiza su
Modelos Gráficos Probabilistas L. Enrique Sucar INAOE Sesión 14: Redes de Decisión un agente racional ideal es aquel que, para cada posible secuencia de percepciones, realiza la acción que maximiza su
GeNie: entorno de desarrollo para la construcción de modelos gráficos de decisión Decision Systems Laboratory, University of Pittsburgh.
 GeNie: entorno de desarrollo para la construcción de modelos gráficos de decisión Decision Systems Laboratory, University of Pittsburgh GeNie Modelos Gráficos Probabilísticos Modelos Gráficos: teoría de
GeNie: entorno de desarrollo para la construcción de modelos gráficos de decisión Decision Systems Laboratory, University of Pittsburgh GeNie Modelos Gráficos Probabilísticos Modelos Gráficos: teoría de
Razonamiento probabilístico y redes bayesianas
 Razonamiento probabilístico y redes bayesianas Clasificador bayesiano Representación y semántica de las RB Blanca A. Vargas Govea vargasgovea@itesm.mx Octubre 12, 2012 Correcciones al ejercicio de clase
Razonamiento probabilístico y redes bayesianas Clasificador bayesiano Representación y semántica de las RB Blanca A. Vargas Govea vargasgovea@itesm.mx Octubre 12, 2012 Correcciones al ejercicio de clase
TEMA 6: INTRODUCCIÓN A UML
 TEMA 6: INTRODUCCIÓN A UML Por qué modelamos? El modelado es una parte central de todas las actividades que conducen a la producción de un software de calidad. Como tal la ingeniería software debe basarse
TEMA 6: INTRODUCCIÓN A UML Por qué modelamos? El modelado es una parte central de todas las actividades que conducen a la producción de un software de calidad. Como tal la ingeniería software debe basarse
ESTIMACIÓN DE LOS FLUJOS DE REMESAS
 ESTIMACIÓN DE LOS FLUJOS DE REMESAS ASOCIADOS A CORREDORES MIGRATORIOS EN CONDICIONES DE INCERTIDUMBRE: EL CASO DE ECUADOR Doctorando P. Campoy Muñoz Directores Dr. C.R. García & Dra. M. Salazar & Dr.
ESTIMACIÓN DE LOS FLUJOS DE REMESAS ASOCIADOS A CORREDORES MIGRATORIOS EN CONDICIONES DE INCERTIDUMBRE: EL CASO DE ECUADOR Doctorando P. Campoy Muñoz Directores Dr. C.R. García & Dra. M. Salazar & Dr.
Líneas de Investigación y Temas de Tesis. L. Enrique Sucar Oficina 8208
 Líneas de Investigación y Temas de Tesis L. Enrique Sucar esucar@inaoep.mx http://ccc.inaoep.mx/~esucar Oficina 8208 Contenido Presentación Líneas de investigación Proyectos actuales Temas de tesis Cursos
Líneas de Investigación y Temas de Tesis L. Enrique Sucar esucar@inaoep.mx http://ccc.inaoep.mx/~esucar Oficina 8208 Contenido Presentación Líneas de investigación Proyectos actuales Temas de tesis Cursos
Visión de Alto Nivel. Dr. Luis Enrique Sucar INAOE. ccc.inaoep.mx/~esucar Sesión 5 Representación y Reconocimiento
 Visión de Alto Nivel Dr. Luis Enrique Sucar INAOE esucar@inaoep.mx ccc.inaoep.mx/~esucar Sesión 5 Representación y Reconocimiento 1 Visión de Alto Nivel orillas Representación del mundo textura color Descripción
Visión de Alto Nivel Dr. Luis Enrique Sucar INAOE esucar@inaoep.mx ccc.inaoep.mx/~esucar Sesión 5 Representación y Reconocimiento 1 Visión de Alto Nivel orillas Representación del mundo textura color Descripción
Aplicaciones de Técnicas de IA. Ana Lilia Laureano-Cruces UAM-A
 Aplicaciones de Técnicas de IA Ana Lilia Laureano-Cruces UAM-A Casi todas las ciencias de ingeniería Comparten técnicas disponibles en el domino de IA. Mencionaremos algunas aplicaciones donde la IA juega
Aplicaciones de Técnicas de IA Ana Lilia Laureano-Cruces UAM-A Casi todas las ciencias de ingeniería Comparten técnicas disponibles en el domino de IA. Mencionaremos algunas aplicaciones donde la IA juega
Tópicos Avanzados: Inteligencia Computacional I
 Tópicos Avanzados: Inteligencia Computacional I V: 17-Ene-18 Instructoras (en orden alfabético) Dra. Ma. del Pilar Gómez Gil Dra. Alicia Morales Reyes Primavera 2018 pgomez@inaoep.mx (c) 2018. P. Gómez-Gil,
Tópicos Avanzados: Inteligencia Computacional I V: 17-Ene-18 Instructoras (en orden alfabético) Dra. Ma. del Pilar Gómez Gil Dra. Alicia Morales Reyes Primavera 2018 pgomez@inaoep.mx (c) 2018. P. Gómez-Gil,
Bases Formales de la Computación: Redes de Bayes (segunda parte)
") Bases Formales de la Computación: Redes de Bayes (segunda parte) Departamento de Ciencias e Ingeniería de la Computación Pontificia Universidad Javeriana Cali Periodo 2008-2 Razonamiento en Redes de Bayes
Bases Formales de la Computación: Redes de Bayes (segunda parte) Departamento de Ciencias e Ingeniería de la Computación Pontificia Universidad Javeriana Cali Periodo 2008-2 Razonamiento en Redes de Bayes
Modelos Gráficos Probabilistas: Principios y Aplicaciones. L. Enrique Sucar INAOE
 Modelos Gráficos Probabilistas: Principios y Aplicaciones L. Enrique Sucar INAOE Información General Página del curso: http://ccc.inaoep.mx/~esucar/clases-pgm/pgm.html Correo: esucar@inaoep.mx E. Sucar,
Modelos Gráficos Probabilistas: Principios y Aplicaciones L. Enrique Sucar INAOE Información General Página del curso: http://ccc.inaoep.mx/~esucar/clases-pgm/pgm.html Correo: esucar@inaoep.mx E. Sucar,
Reconocimiento visual de ademanes usando MS Kinect - Introducción. Dr. Héctor Avilés Escuela de Invierno de Robótica 2015
 Reconocimiento visual de ademanes usando MS Kinect - Introducción Dr. Héctor Avilés Escuela de Invierno de Robótica 2015 Contenido Motivación Dispositivos de captura Reconocimiento visual de ademanes Resumen
Reconocimiento visual de ademanes usando MS Kinect - Introducción Dr. Héctor Avilés Escuela de Invierno de Robótica 2015 Contenido Motivación Dispositivos de captura Reconocimiento visual de ademanes Resumen
Tema 6 Razonamiento aproximado
 Tema 6 Razonamiento aproximado Ampliación de Ingeniería del Conocimiento Eva Millán 1 Esquema del tema 6.1. Introducción al razonamiento aproximado 6.2. El modelo de factores de certeza 6.3. Conjuntos
Tema 6 Razonamiento aproximado Ampliación de Ingeniería del Conocimiento Eva Millán 1 Esquema del tema 6.1. Introducción al razonamiento aproximado 6.2. El modelo de factores de certeza 6.3. Conjuntos
OFERTAS DE TRABAJOS FIN DE GRADO
 Sistemas de detección y seguimiento preciso de la cara y partes del cuerpo Descripción: Se desarrollarán algoritmos para la detección de la cara y de distintas partes del cuerpo, que funcionen en tiempo
Sistemas de detección y seguimiento preciso de la cara y partes del cuerpo Descripción: Se desarrollarán algoritmos para la detección de la cara y de distintas partes del cuerpo, que funcionen en tiempo
Teoría de probabilidades
 Modelos Probabilistas Teoría de probabilidades Teoría de probabilidades Definiremos como probabilidad a priori (P(a)) asociada a una proposición como el grado de creencia en ella a falta de otra información
Modelos Probabilistas Teoría de probabilidades Teoría de probabilidades Definiremos como probabilidad a priori (P(a)) asociada a una proposición como el grado de creencia en ella a falta de otra información
Métodos de Inteligencia Artificial
 Métodos de Inteligencia Artificial L. Enrique Sucar (INAOE) esucar@inaoep.mx ccc.inaoep.mx/esucar Tecnologías de Información UPAEP Redes Bayesianas: Parte I Introducción Representación Inferencia Propagación
Métodos de Inteligencia Artificial L. Enrique Sucar (INAOE) esucar@inaoep.mx ccc.inaoep.mx/esucar Tecnologías de Información UPAEP Redes Bayesianas: Parte I Introducción Representación Inferencia Propagación
Tema 6. Tema 6. Tema 6. Modelado 3D 6.1 Introducción 6.2 Modelado plano de superficies 6.3 modelado de sólidos. 6.1 Introducción
 Tema 6 Tema 6 Tema 6. Modelado 3D 6.1 Introducción 6.3 modelado de sólidos Gràfics per Computador 2004/2005 Tema 6. Modelado 3D 1 6.1 Introducción Una escena puede contener distintos tipos de objetos (nubes,
Tema 6 Tema 6 Tema 6. Modelado 3D 6.1 Introducción 6.3 modelado de sólidos Gràfics per Computador 2004/2005 Tema 6. Modelado 3D 1 6.1 Introducción Una escena puede contener distintos tipos de objetos (nubes,
Decidiendo en 3D. Soluciones de Negocio
 Decidiendo en 3D Soluciones de Negocio Desarrollo Propio Dedicado a la Decisión Bayesiana 1 www.aparasw.com Arquitectura Objetivo de la presentación Objetivo de la presentación 2 www.aparasw.com El Porqué
Decidiendo en 3D Soluciones de Negocio Desarrollo Propio Dedicado a la Decisión Bayesiana 1 www.aparasw.com Arquitectura Objetivo de la presentación Objetivo de la presentación 2 www.aparasw.com El Porqué
CAPITULO I... 1 INTRODUCCION ANTECEDENTES Y ORIGENES DE LA ROBOTICA LEYES PARA LA ROBOTICA... 4
 C O N T E N I D O Prólogo... i CAPITULO I... 1 INTRODUCCION... 1 1.1. ANTECEDENTES Y ORIGENES DE LA ROBOTICA... 2 1.2. LEYES PARA LA ROBOTICA... 4 1.3. ARQUITECTURAS DE LOS ROBOTS... 5 1.3.1. POLIARTICULADOS...
C O N T E N I D O Prólogo... i CAPITULO I... 1 INTRODUCCION... 1 1.1. ANTECEDENTES Y ORIGENES DE LA ROBOTICA... 2 1.2. LEYES PARA LA ROBOTICA... 4 1.3. ARQUITECTURAS DE LOS ROBOTS... 5 1.3.1. POLIARTICULADOS...
Introducción a la Robótica
 Introducción a la Robótica L. Enrique Sucar INAOE Robótica Probabilista, L. E. Sucar 1 Sesión 7: Representación del ambiente (mapas) Introducción a la Robótica L. Enrique Sucar Robótica Probabilista, L.
Introducción a la Robótica L. Enrique Sucar INAOE Robótica Probabilista, L. E. Sucar 1 Sesión 7: Representación del ambiente (mapas) Introducción a la Robótica L. Enrique Sucar Robótica Probabilista, L.
Animación 3D por Computador I
 20 de mayo de 2011 Animación y Simulación ¾Qué es animación por computador? A partir de una escena con un número dado de objetos, hacer cambiar su posición en el tiempo de acuerdo a acciones preestablecidas
20 de mayo de 2011 Animación y Simulación ¾Qué es animación por computador? A partir de una escena con un número dado de objetos, hacer cambiar su posición en el tiempo de acuerdo a acciones preestablecidas
License Plate Detection using Neural Networks
 License Plate Detection using Neural Networks Luis Carrera, Marco Mora Les Fous du Pixel Image Processing Research Group Department of Computer Science Catholic University of Maule http://www.lfdp-iprg.net
License Plate Detection using Neural Networks Luis Carrera, Marco Mora Les Fous du Pixel Image Processing Research Group Department of Computer Science Catholic University of Maule http://www.lfdp-iprg.net
GUÍAS. Módulo de Pensamiento científico Ciencias físicas SABER PRO
 Módulo de Pensamiento científico Módulo Pensamiento científico Este módulo evalúa el pensamiento científico que desarrollan los estudiantes a lo largo de sus carreras universitarias. El pensamiento científico
Módulo de Pensamiento científico Módulo Pensamiento científico Este módulo evalúa el pensamiento científico que desarrollan los estudiantes a lo largo de sus carreras universitarias. El pensamiento científico
Tópicos Avanzados: Inteligencia Computacional I
 C291-78 Tópicos Avanzados: Inteligencia Computacional I V: 20-Ene-16 Instructoras (en orden alfabético) Dra. Ma. del Pilar Gómez Gil Dra. Alicia Morales Reyes Primavera 2016 pgomez@inaoep.mx (c) 2016.
C291-78 Tópicos Avanzados: Inteligencia Computacional I V: 20-Ene-16 Instructoras (en orden alfabético) Dra. Ma. del Pilar Gómez Gil Dra. Alicia Morales Reyes Primavera 2016 pgomez@inaoep.mx (c) 2016.
Introducción a la minería de datos. CI-2352 Intr. a la minería de datos Prof. Braulio José Solano Rojas ECCI, UCR
 Introducción a la minería de datos CI-2352 Intr. a la minería de datos Prof. Braulio José Solano Rojas ECCI, UCR Minería de datos Detección, interpretación y predicción de patrones cuantitativos y cualitativos
Introducción a la minería de datos CI-2352 Intr. a la minería de datos Prof. Braulio José Solano Rojas ECCI, UCR Minería de datos Detección, interpretación y predicción de patrones cuantitativos y cualitativos
OTRAS OPCIONES DE PREDICCIÓN
 OTRAS OPCIONES DE PREDICCIÓN Incertidumbre se refiere a la toma de decisiones sin contar con la información adecuada. Es un problema porque nos impide tomar la mejor decisión y muy frecuentemente nos
OTRAS OPCIONES DE PREDICCIÓN Incertidumbre se refiere a la toma de decisiones sin contar con la información adecuada. Es un problema porque nos impide tomar la mejor decisión y muy frecuentemente nos
Reconocimiento automático de palabras en documentos históricos usando redes neuronales convolucionales
 Reconocimiento automático de palabras en documentos históricos usando redes neuronales convolucionales Dra. Ma. de Guadalupe García Hernández Departamento de Ingeniería Electrónica Objetivo general Aplicar
Reconocimiento automático de palabras en documentos históricos usando redes neuronales convolucionales Dra. Ma. de Guadalupe García Hernández Departamento de Ingeniería Electrónica Objetivo general Aplicar
Sesión 7: Campos de Markov
 Sesión 7: Campos de Markov Campos de Markov Introducción Modelo de Ising Representación Tipos de Modelos Redes de Markov Vecindades Algoritmos ICM, Metrópolis, Recocido Simulado Aplicaciones Visión L.E.
Sesión 7: Campos de Markov Campos de Markov Introducción Modelo de Ising Representación Tipos de Modelos Redes de Markov Vecindades Algoritmos ICM, Metrópolis, Recocido Simulado Aplicaciones Visión L.E.
REDES BAYESIANAS. O Redes de creencias
 REDES BAYESIANAS O Redes de creencias Probabilidades conjuntas J: juega bolos. B: barre la casa todos los días. H: se dislocó el hombro. Introducción a RB Que son: Un grafo dirigido a cíclico (DAG) en
REDES BAYESIANAS O Redes de creencias Probabilidades conjuntas J: juega bolos. B: barre la casa todos los días. H: se dislocó el hombro. Introducción a RB Que son: Un grafo dirigido a cíclico (DAG) en
Razonamiento probabilístico y redes bayesianas. Semántica de las RB Inferencia exacta Blanca A. Vargas Govea Octubre 16, 2012
 Razonamiento probabilístico y redes bayesianas Semántica de las RB Inferencia exacta Blanca A. Vargas Govea vargasgovea@itesm.mx Octubre 16, 2012 Objetivos Conocer la semántica de las redes bayesianas.
Razonamiento probabilístico y redes bayesianas Semántica de las RB Inferencia exacta Blanca A. Vargas Govea vargasgovea@itesm.mx Octubre 16, 2012 Objetivos Conocer la semántica de las redes bayesianas.
Fecha de elaboración: 2003 Fecha de última actualización: F1232 Probabilidad y Estadística 1/9
 Programa elaborado por: PROGRAMA DE ESTUDIO PROBABILIDAD Y ESTADÍSTICA Programa Educativo: Área de Formación : Licenciatura en Física Integral Profesional Horas teóricas: 4 Horas prácticas: 0 Total de
Programa elaborado por: PROGRAMA DE ESTUDIO PROBABILIDAD Y ESTADÍSTICA Programa Educativo: Área de Formación : Licenciatura en Física Integral Profesional Horas teóricas: 4 Horas prácticas: 0 Total de
Cédula de Referencia Quiero Ser Maestro. Prueba Razonamiento
 Cédula de Referencia Quiero Ser Maestro Prueba Razonamiento Octubre 2014 1 Directorio técnico Harvey Spencer Sánchez Restrepo Director Ejecutivo José Daniel Espinosa Rodríguez Coordinador General Técnico
Cédula de Referencia Quiero Ser Maestro Prueba Razonamiento Octubre 2014 1 Directorio técnico Harvey Spencer Sánchez Restrepo Director Ejecutivo José Daniel Espinosa Rodríguez Coordinador General Técnico
Sesión 8: Campos de Markov
 Modelos Gráficos Probabilistas L. Enrique Sucar INAOE Sesión 8: Campos de Markov la verdadera lógica de este mundo es el cálculo de probabilidades, que toma en cuanta la magnitud de las probabilidades,
Modelos Gráficos Probabilistas L. Enrique Sucar INAOE Sesión 8: Campos de Markov la verdadera lógica de este mundo es el cálculo de probabilidades, que toma en cuanta la magnitud de las probabilidades,
Inferencia en Modelos Gráficos para detección de Tópicos (LDA)
") Inferencia en Modelos Gráficos para detección de Tópicos (LDA) Francisco Barreras 19 de enero de 2017 Contenido 1 Introducción y Contexto 2 Motivación 3 Definiciones y Fundamentos 4 Razonamiento y flujos
Inferencia en Modelos Gráficos para detección de Tópicos (LDA) Francisco Barreras 19 de enero de 2017 Contenido 1 Introducción y Contexto 2 Motivación 3 Definiciones y Fundamentos 4 Razonamiento y flujos
Se observa X, realización del fenómeno aleatorio. Lo anterior implica razonamiento inductivo.
 Pruebas de Hipótesis Hay un contexto. Hay un fenómeno aleatorio de interés. ( ΩF,, P( θ )) Valor de θ desconocido. Se observa X, realización del fenómeno aleatorio. Lo anterior implica razonamiento inductivo.
Pruebas de Hipótesis Hay un contexto. Hay un fenómeno aleatorio de interés. ( ΩF,, P( θ )) Valor de θ desconocido. Se observa X, realización del fenómeno aleatorio. Lo anterior implica razonamiento inductivo.
Competencia Matemática
 Instituto Nacional para la Evaluación de la Educación Dirección de Proyectos Internacionales y Especiales Competencia matemática en PISA Jornadas bajacalifornianas en materia de Evaluación Educativa 2011
Instituto Nacional para la Evaluación de la Educación Dirección de Proyectos Internacionales y Especiales Competencia matemática en PISA Jornadas bajacalifornianas en materia de Evaluación Educativa 2011
Modelos causales en inteligencia artificial Un caso práctico
 SECCIÓN Fisicomatemáticas e Ingeniería Modelos causales en inteligencia artificial Un caso práctico Alicia E. Silva Ávila Alma J. Domínguez Lugo Abraham Castorena Peña Roxana Elizondo Díaz Facultad de
SECCIÓN Fisicomatemáticas e Ingeniería Modelos causales en inteligencia artificial Un caso práctico Alicia E. Silva Ávila Alma J. Domínguez Lugo Abraham Castorena Peña Roxana Elizondo Díaz Facultad de
Universidad Nacional de Educación a Distancia. Ingeniería Técnica en Informática de Sistemas. Introducción a la Inteligencia Artificial (2º curso)
") Universidad Nacional de Educación a Distancia Ingeniería Técnica en Informática de Sistemas Introducción a la Inteligencia Artificial (2º curso) Soluciones exámenes septiembre 2010 Ejercicio 1. (Valoración:
Universidad Nacional de Educación a Distancia Ingeniería Técnica en Informática de Sistemas Introducción a la Inteligencia Artificial (2º curso) Soluciones exámenes septiembre 2010 Ejercicio 1. (Valoración:
Clasificación de los sistemas
 Clasificación de los sistemas Para clasificar los sistemas tomaremos en cuenta las características que poseen los modelos matemáticos empleados. La siguiente clasificación jerárquica permite señalar el
Clasificación de los sistemas Para clasificar los sistemas tomaremos en cuenta las características que poseen los modelos matemáticos empleados. La siguiente clasificación jerárquica permite señalar el
Capítulo 1. Introducción Descripción del problema Propósito Posibles Aplicaciones... 12
 Contenido Capítulo 1. Introducción... 10 1.1 Descripción del problema... 11 1.2 Propósito... 12 1.3 Posibles Aplicaciones... 12 1.4 Estado del Problema y Selección de Mejores Prototipos... 13 1.4.1 Detección
Contenido Capítulo 1. Introducción... 10 1.1 Descripción del problema... 11 1.2 Propósito... 12 1.3 Posibles Aplicaciones... 12 1.4 Estado del Problema y Selección de Mejores Prototipos... 13 1.4.1 Detección
NORMA UNE :2008 ANÁLISIS Y EVALUACIÓN DEL RIESGO AMBIENTAL
 MR-RA. Responsabilidad ambiental. NORMA UNE 150008:2008 ANÁLISIS Y EVALUACIÓN DEL RIESGO AMBIENTAL José Luís Tejera Oliver Director de Desarrollo Estratégico y Corporativo Asociación Española de Normalización
MR-RA. Responsabilidad ambiental. NORMA UNE 150008:2008 ANÁLISIS Y EVALUACIÓN DEL RIESGO AMBIENTAL José Luís Tejera Oliver Director de Desarrollo Estratégico y Corporativo Asociación Española de Normalización
Desayuno Tecnológico: Tendencias y Herramientas de Video Inteligente en Seguridad Física
 Desayuno Tecnológico: Tendencias y Herramientas de Video Inteligente en Seguridad Física Áreas Tecnológicas Biometría: Identificación y autenticación de seres vivos a través de una o varias características
Desayuno Tecnológico: Tendencias y Herramientas de Video Inteligente en Seguridad Física Áreas Tecnológicas Biometría: Identificación y autenticación de seres vivos a través de una o varias características
Créditos: 6 Horas Presenciales del estudiante: 45 Horas No Presenciales del estudiante: 105 Total Horas: 150 UTILIZACIÓN DE LA PLATAFORMA VIRTUAL:
 Pag. 1 de 9 GUÍA DOCENTE CURSO: 2012-13 DATOS BÁSICOS DE LA ASIGNATURA Asignatura: Sistemas Expertos Probabilísticos y Razonamiento Temporal Aproximado Código de asignatura: 70642205 Plan: Máster en Informática
Pag. 1 de 9 GUÍA DOCENTE CURSO: 2012-13 DATOS BÁSICOS DE LA ASIGNATURA Asignatura: Sistemas Expertos Probabilísticos y Razonamiento Temporal Aproximado Código de asignatura: 70642205 Plan: Máster en Informática
Diagramas De Casos De Uso
 Estáticos Diagramas De Casos De Uso Los diagramas de casos de uso documentan el comportamiento de un sistema desde el punto de vista del usuario.. Por lo tanto los casos de uso determinan los requisitos
Estáticos Diagramas De Casos De Uso Los diagramas de casos de uso documentan el comportamiento de un sistema desde el punto de vista del usuario.. Por lo tanto los casos de uso determinan los requisitos
7. PARAMETRIZACIÓN SOBRE LA RED DE PRUEBA
 7. PARAMETRIZACIÓN SOBRE LA RED DE PRUEBA 7.1. Red de prueba Para realizar el análisis de los parámetros del problema e intentar encontrar los valores óptimos de estos se ha hecho uso de un modelo de ciudad
7. PARAMETRIZACIÓN SOBRE LA RED DE PRUEBA 7.1. Red de prueba Para realizar el análisis de los parámetros del problema e intentar encontrar los valores óptimos de estos se ha hecho uso de un modelo de ciudad
Nombre de la Asignatura ESTADISTICA GENERAL INFORMACIÓN GENERAL Escuela. Departamento Unidad de Estudios Básicos
 Código 0082023 UNIVERSIDAD DE ORIENTE ESTADISTICA GENERAL INFORMACIÓN GENERAL Escuela Departamento Unidad de Estudios Básicos Ciencias Horas Semanales 05 Horas Teóricas 02 Pre-requisitos Matemática I (0081714)
Código 0082023 UNIVERSIDAD DE ORIENTE ESTADISTICA GENERAL INFORMACIÓN GENERAL Escuela Departamento Unidad de Estudios Básicos Ciencias Horas Semanales 05 Horas Teóricas 02 Pre-requisitos Matemática I (0081714)
INFERENCIA BAYESIANA. Antonio López Universitat de València. ESTADÍSTICA ESPACIAL EN EPIDEMIOLOGÍA Y MEDIO AMBIENTE Burjassot, Primavera de 2004
 Antonio López Universitat de València ESTADÍSTICA ESPACIAL EN EPIDEMIOLOGÍA Y MEDIO AMBIENTE Burjassot, Primavera de 2004 - Introducción a la inferencia bayesiana - Análisis bayesiano mediante simulación
Antonio López Universitat de València ESTADÍSTICA ESPACIAL EN EPIDEMIOLOGÍA Y MEDIO AMBIENTE Burjassot, Primavera de 2004 - Introducción a la inferencia bayesiana - Análisis bayesiano mediante simulación
Representación de Conocimientos
 Representación de Conocimientos Asunción Gómez-Pérez asun@fi.upm.es Despacho 2104 Departamento de Inteligencia Artificial Facultad de Informática Universidad Politécnica de Madrid Campus de Montegancedo
Representación de Conocimientos Asunción Gómez-Pérez asun@fi.upm.es Despacho 2104 Departamento de Inteligencia Artificial Facultad de Informática Universidad Politécnica de Madrid Campus de Montegancedo
8. MODELO DE ANÁLISIS DEL MOVIMIENTO VISUAL. 8.1 Metodología experimental
 8. MODELO DE ANÁLISIS DEL MOVIMIENTO VISUAL 8.1 Metodología experimental A partir de las consideraciones anteriores, en las páginas a continuación nos dedicaremos a identificar variables y a proponer procedimientos
8. MODELO DE ANÁLISIS DEL MOVIMIENTO VISUAL 8.1 Metodología experimental A partir de las consideraciones anteriores, en las páginas a continuación nos dedicaremos a identificar variables y a proponer procedimientos
Procesamiento de voz - Reconocimiento de voz II
 Procesamiento de voz - Reconocimiento de voz II Marc S. Reßl Roxana Saint-Nom 2009 Ingeniería Electrónica Instituto Tecnológico de Buenos Aires Reconocimiento de voz Las técnicas que vimos hasta ahora
Procesamiento de voz - Reconocimiento de voz II Marc S. Reßl Roxana Saint-Nom 2009 Ingeniería Electrónica Instituto Tecnológico de Buenos Aires Reconocimiento de voz Las técnicas que vimos hasta ahora
INGENIERÍA WEB. Dr. Mario Rossainz López Fac. de Cs. de la Computación Benemérita Universidad Autónoma de Puebla Otoño de 2017
 INGENIERÍA WEB Dr. Mario Rossainz López Fac. de Cs. de la Computación Benemérita Universidad Autónoma de Puebla Otoño de 2017 INTRODUCCIÓN: Aspectos importantes en las aplicaciones WEB Modelo de Dominio
INGENIERÍA WEB Dr. Mario Rossainz López Fac. de Cs. de la Computación Benemérita Universidad Autónoma de Puebla Otoño de 2017 INTRODUCCIÓN: Aspectos importantes en las aplicaciones WEB Modelo de Dominio
2010 Coordinación de Ciencias Computacionales INAOE. Reporte Técnico No. CCC de marzo de 2010
 Detección automática del decaimiento de habilidades motrices en la marcha de adultos mayores German Cuaya Simbro, Angélica Muñoz Meléndez, Eduardo F. Morales Manzanares Reporte Técnico No. CCC-10-003 16
Detección automática del decaimiento de habilidades motrices en la marcha de adultos mayores German Cuaya Simbro, Angélica Muñoz Meléndez, Eduardo F. Morales Manzanares Reporte Técnico No. CCC-10-003 16
Contenido. vii. Prólogo... i Presentación... iii Grupo de trabajo...v. 1. Introducción y conceptos preliminares...1
 Contenido Prólogo... i Presentación... iii Grupo de trabajo...v 1. Introducción y conceptos preliminares...1 2. Tipos de modelos estadísticos lineales...19 Caso 2.1...20 Caso 2.2...26 Caso 2.3...30 3.
Contenido Prólogo... i Presentación... iii Grupo de trabajo...v 1. Introducción y conceptos preliminares...1 2. Tipos de modelos estadísticos lineales...19 Caso 2.1...20 Caso 2.2...26 Caso 2.3...30 3.
MAESTRÍA EN ELECTRÓNICA Y AUTOMATIZACIÓN, MENCIÓN SISTEMAS DE CONTROL. Malla Curricular
 MAESTRÍA EN ELECTRÓNICA Y AUTOMATIZACIÓN, MENCIÓN SISTEMAS DE CONTROL Remitir su hoja de vida y documentación de respaldo al correo: edgarpcordovac@uta.edu.ec Sistemas Eléctricos y Electrónicos Titulación
MAESTRÍA EN ELECTRÓNICA Y AUTOMATIZACIÓN, MENCIÓN SISTEMAS DE CONTROL Remitir su hoja de vida y documentación de respaldo al correo: edgarpcordovac@uta.edu.ec Sistemas Eléctricos y Electrónicos Titulación
Manejo de Incertidumbre
 Inteligencia Artificial Manejo de Incertidumbre Sesión 7 Eduardo Morales / L. Enrique Sucar Introducción Los sistemas inteligentes deben ser capaces de representar y razonar con incertidumbre. Existen
Inteligencia Artificial Manejo de Incertidumbre Sesión 7 Eduardo Morales / L. Enrique Sucar Introducción Los sistemas inteligentes deben ser capaces de representar y razonar con incertidumbre. Existen
TECNOLOGÍAS INTELIGENTES PARA EXPLOTACIÓN DE INFORMACIÓN
 TECNOLOGÍAS INTELIGENTES PARA EXPLOTACIÓN DE INFORMACIÓN FUNDAMENTOS CURSO DE DOCTORADO Dr. Ramón García-Martínez * * * CONTEXTO La inteligencia de negocio propone un abordaje interdisciplinario que tomando:
TECNOLOGÍAS INTELIGENTES PARA EXPLOTACIÓN DE INFORMACIÓN FUNDAMENTOS CURSO DE DOCTORADO Dr. Ramón García-Martínez * * * CONTEXTO La inteligencia de negocio propone un abordaje interdisciplinario que tomando:
Inteligencia Artificial
 Mayo 21 de 2008 El estudiante de la Pontificia Universidad Javeriana, como agente de su propia formación, es corresponsable de la Identidad Institucional, uno de cuyos cimientos es tener como hábito un
Mayo 21 de 2008 El estudiante de la Pontificia Universidad Javeriana, como agente de su propia formación, es corresponsable de la Identidad Institucional, uno de cuyos cimientos es tener como hábito un
Inferencia Exacta: Ejemplo
 Inferencia Exacta: Ejemplo Inferencia en Redes Bayesianas La distribución de probabilidad conjunta de la red sería: P(D, A, S, F, I ) = P(I S, F )P(F )P(S D, A)P(D)P(A) Debemos calcular P(F I = si, D =
Inferencia Exacta: Ejemplo Inferencia en Redes Bayesianas La distribución de probabilidad conjunta de la red sería: P(D, A, S, F, I ) = P(I S, F )P(F )P(S D, A)P(D)P(A) Debemos calcular P(F I = si, D =
[ ] [ ] Lección 8. Análisis filogenético Bayesiano. Inferencia Bayesiana Introducción. Inferencia Bayesiana Máxima verosimilitud
![[ ] [ ] Lección 8. Análisis filogenético Bayesiano. Inferencia Bayesiana Introducción. Inferencia Bayesiana Máxima verosimilitud](/thumbs/89/98140822.jpg "[ ] [ ] Lección 8. Análisis filogenético Bayesiano. Inferencia Bayesiana Introducción. Inferencia Bayesiana Máxima verosimilitud") Introducción Imagina una caja con 100 dados. Noventa de esos dados son insesgados o justos y 10 son sesgados. Las probabilidades de observar diferentes resultados al tirar los dados son: Lección 8. Análisis
Introducción Imagina una caja con 100 dados. Noventa de esos dados son insesgados o justos y 10 son sesgados. Las probabilidades de observar diferentes resultados al tirar los dados son: Lección 8. Análisis
Itinerario: Inteligencia Computacional
 Máster Universitario en Investigación e Innovación en Tecnologías de la Información y las Comunicaciones Itinerario: Inteligencia Computacional Escuela Politécnica Superior Universidad Autónoma de Madrid
Máster Universitario en Investigación e Innovación en Tecnologías de la Información y las Comunicaciones Itinerario: Inteligencia Computacional Escuela Politécnica Superior Universidad Autónoma de Madrid
APROXIMACIÓN CUALITATIVA A LA DOCENCIA DE CONCEPTOS FÍSICOS
 Departamento de Informática Universidad de Valladolid Campus de Segovia APROXIMACIÓN CUALITATIVA A LA DOCENCIA DE CONCEPTOS FÍSICOS Juan J. Álvarez-Sánchez, José V. Álvarez-Bravo, Francisco J. González-Cabrera
Departamento de Informática Universidad de Valladolid Campus de Segovia APROXIMACIÓN CUALITATIVA A LA DOCENCIA DE CONCEPTOS FÍSICOS Juan J. Álvarez-Sánchez, José V. Álvarez-Bravo, Francisco J. González-Cabrera
NVeiler Video Filter
 Plug-in para VirtualDub que oculta rostros y objetos NVeiler Video Filter 1 NVeiler Video Filter Plug-In para VirtualDub que oculta rostros y objetos Documento actualizado el 20 de junio de 2012 CONTENIDO
Plug-in para VirtualDub que oculta rostros y objetos NVeiler Video Filter 1 NVeiler Video Filter Plug-In para VirtualDub que oculta rostros y objetos Documento actualizado el 20 de junio de 2012 CONTENIDO
OBJETIVOS DE LAS MATEMÁTICAS APLICADAS A LAS CIENCIAS
 2º BACHILLERATO DE CIENCIAS SOCIALES OBJETIVOS DE LAS MATEMÁTICAS APLICADAS A LAS CIENCIAS SICIALES II CONTENIDOS DE LAS MATEMÁTICAS APLICADAS A LAS CIENCIAS SOCIALES II CRITERIOS DE EVALUACIÓN DE LAS
2º BACHILLERATO DE CIENCIAS SOCIALES OBJETIVOS DE LAS MATEMÁTICAS APLICADAS A LAS CIENCIAS SICIALES II CONTENIDOS DE LAS MATEMÁTICAS APLICADAS A LAS CIENCIAS SOCIALES II CRITERIOS DE EVALUACIÓN DE LAS
MODULO IV. Análisis y Diseño de Sistemas de Información INF-162 III. UML. 4.9 Diagramas de Componentes
 MODULO IV Análisis y Diseño de Sistemas de Información INF-162 III. UML 4.9 Diagramas de Componentes Facilitador: Miguel Cotaña 30 de Noviembre 2009 1 Componentes Pertenecen al mundo físico, es decir,
MODULO IV Análisis y Diseño de Sistemas de Información INF-162 III. UML 4.9 Diagramas de Componentes Facilitador: Miguel Cotaña 30 de Noviembre 2009 1 Componentes Pertenecen al mundo físico, es decir,
Los grafos son estructuras de datos Representan relaciones entre objetos. Son aplicables en. Relaciones arbitrarias, es decir No jerárquicas.
 ESTRUCTURA DE DATOS Los grafos son estructuras de datos Representan relaciones entre objetos Relaciones arbitrarias, es decir No jerárquicas Son aplicables en Química Modem Geografía Ing. Eléctrica e Industrial,
ESTRUCTURA DE DATOS Los grafos son estructuras de datos Representan relaciones entre objetos Relaciones arbitrarias, es decir No jerárquicas Son aplicables en Química Modem Geografía Ing. Eléctrica e Industrial,
Curso de Inteligencia Artificial
 Curso de Inteligencia Artificial Modelos Ocultos de Markov Gibran Fuentes Pineda IIMAS, UNAM Redes Bayesianas Representación gráfica de relaciones probabilísticas Relaciones causales entre variables aleatorias
Curso de Inteligencia Artificial Modelos Ocultos de Markov Gibran Fuentes Pineda IIMAS, UNAM Redes Bayesianas Representación gráfica de relaciones probabilísticas Relaciones causales entre variables aleatorias
CLASE 3: UML DIAGRAMAS CASOS DE USO. Universidad Simón Bolívar. Ingeniería de Software. Prof. Ivette Martínez
 CLASE 3: UML DIAGRAMAS CASOS DE USO Universidad Simón Bolívar. Ingeniería de Software. Prof. Ivette Martínez UML UML es un lenguaje para especificar, visualizar, construir y documentar los artefactos de
CLASE 3: UML DIAGRAMAS CASOS DE USO Universidad Simón Bolívar. Ingeniería de Software. Prof. Ivette Martínez UML UML es un lenguaje para especificar, visualizar, construir y documentar los artefactos de
Planeación de Trayectorias y Métodos de Búsqueda. Dr. Jesús Antonio González Bernal
 IA Planeación de Trayectorias y Métodos de Búsqueda Dr. Jesús Antonio González Bernal Planeación y Búsqueda Cuando enfrentamos un problema que se resuelve por una búsqueda, se suelen presentar dos escenarios:
IA Planeación de Trayectorias y Métodos de Búsqueda Dr. Jesús Antonio González Bernal Planeación y Búsqueda Cuando enfrentamos un problema que se resuelve por una búsqueda, se suelen presentar dos escenarios:
PROGRAMACIÓN DEL DEPARTAMENTO DE MATEMÁTICAS.
 PROGRAMACIÓN DEL DEPARTAMENTO DE MATEMÁTICAS. I.E.S SANTA BRÍGIDA. CURSO 2015-2016 1. Introducción general 2. Programa de 1º de E.S.O. 3. Programa de 2º de E.S.O. 4. Programa de 3º de E.S.O. a. Matemáticas
PROGRAMACIÓN DEL DEPARTAMENTO DE MATEMÁTICAS. I.E.S SANTA BRÍGIDA. CURSO 2015-2016 1. Introducción general 2. Programa de 1º de E.S.O. 3. Programa de 2º de E.S.O. 4. Programa de 3º de E.S.O. a. Matemáticas
Mapeo. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy? Localización. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de
M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy? Localización. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de
Análisis e Interpretación de los Datos de Vigilancia
 Análisis e Interpretación de los Datos de Vigilancia Consideraciones en el Análisis de los Datos de Vigilancia Conocer su base de datos Proceder de lo más simple a lo más complejo Reconocer cuando las
Análisis e Interpretación de los Datos de Vigilancia Consideraciones en el Análisis de los Datos de Vigilancia Conocer su base de datos Proceder de lo más simple a lo más complejo Reconocer cuando las
Universidad de La Sabana Análisis comparativo de los paradigmas de simulación
 Universidad de La Sabana Análisis comparativo de los paradigmas de simulación Autor: Alfonso Sarmiento Agenda 1. Definiciones previas 2. Comparación cualitativa de los paradigmas 3. Comparación cuantitativa
Universidad de La Sabana Análisis comparativo de los paradigmas de simulación Autor: Alfonso Sarmiento Agenda 1. Definiciones previas 2. Comparación cualitativa de los paradigmas 3. Comparación cuantitativa
Universidad nacional Autónoma de México Facultad de psicología. Matemáticas II
 Universidad nacional Autónoma de México Facultad de psicología PROGRAMA DE ASIGNATURA Nombre de la Asignatura Matemáticas II Clave 0497 Semestre Segundo Número de créditos 8 Horas Teoría 4 Horas Práctica
Universidad nacional Autónoma de México Facultad de psicología PROGRAMA DE ASIGNATURA Nombre de la Asignatura Matemáticas II Clave 0497 Semestre Segundo Número de créditos 8 Horas Teoría 4 Horas Práctica
TEMA 9: DIAGRAMA DE OBJETOS, SECUENCIA Y DESPLIEGUE EN UML
 TEMA 9: DIAGRAMA DE OBJETOS, SECUENCIA Y DESPLIEGUE EN UML Diagramas en UML El bloque de construcción básico de UML es un Diagrama Introducción a UML 2 1 Diagrama de Objetos en UML Se utilizan para visualizar,
TEMA 9: DIAGRAMA DE OBJETOS, SECUENCIA Y DESPLIEGUE EN UML Diagramas en UML El bloque de construcción básico de UML es un Diagrama Introducción a UML 2 1 Diagrama de Objetos en UML Se utilizan para visualizar,
Prueba II. Procesamiento Digital de Imágenes
 Prueba II Procesamiento Digital de Imágenes Nombre: Firma: Fecha: /nov/2005.- Escriba el pseudo código para implementar la operación morfológica dilatación, con el siguiente elemento estructurante : función
Prueba II Procesamiento Digital de Imágenes Nombre: Firma: Fecha: /nov/2005.- Escriba el pseudo código para implementar la operación morfológica dilatación, con el siguiente elemento estructurante : función
MODELOS Y MODELADO. Gilberto Gallopín.
 MODELOS Y MODELADO Gilberto Gallopín ggallopin@gmail.com Seminario Prospectiva y Pensamiento Estratégico INTA, IIPyPP, 2 al 6 de junio de 2014 C.A.B.A. PROSPECTIVA Y MODELOS La Prospectiva es una disciplina
MODELOS Y MODELADO Gilberto Gallopín ggallopin@gmail.com Seminario Prospectiva y Pensamiento Estratégico INTA, IIPyPP, 2 al 6 de junio de 2014 C.A.B.A. PROSPECTIVA Y MODELOS La Prospectiva es una disciplina
Modelos Gráficos Probabilistas L. Enrique Sucar INAOE. Sesión 10: Redes Bayesianas Inferencia. 1era parte. [Neapolitan 90]
![Modelos Gráficos Probabilistas L. Enrique Sucar INAOE. Sesión 10: Redes Bayesianas Inferencia. 1era parte. [Neapolitan 90]](/thumbs/59/43445615.jpg "Modelos Gráficos Probabilistas L. Enrique Sucar INAOE. Sesión 10: Redes Bayesianas Inferencia. 1era parte. [Neapolitan 90]") Modelos Gráficos Probabilistas L. Enrique Sucar INAOE Sesión 10: Redes Bayesianas Inferencia 1era parte [Neapolitan 90] Inferencia en Redes Bayesianas Introducción Clases de algoritmos 1era Parte Propagación
Modelos Gráficos Probabilistas L. Enrique Sucar INAOE Sesión 10: Redes Bayesianas Inferencia 1era parte [Neapolitan 90] Inferencia en Redes Bayesianas Introducción Clases de algoritmos 1era Parte Propagación
Medir los Rayos. Mr. Bonnet V.P. International Congreso Latinoamericano de Energía Eólica Junio 2016
 Medir los Rayos Mr. Bonnet V.P. International Congreso Latinoamericano de Energía Eólica Junio 2016 EL RIESGO DE RAYOS PARA EL SECTOR EOLICO EL RIESGO ELECTRICO Sobretensiones sobre los equipos de producción
Medir los Rayos Mr. Bonnet V.P. International Congreso Latinoamericano de Energía Eólica Junio 2016 EL RIESGO DE RAYOS PARA EL SECTOR EOLICO EL RIESGO ELECTRICO Sobretensiones sobre los equipos de producción
4.1 CONTENIDOS PARA PRIMERO DE LA ESO. Conceptos
 4.1 CONTENIDOS PARA PRIMERO DE LA ESO Conceptos I. Aritmética y álgebra. 1. Números naturales. _ Significado y uso en distintos contextos. _ El sistema de numeración decimal. 2. Operaciones con los números
4.1 CONTENIDOS PARA PRIMERO DE LA ESO Conceptos I. Aritmética y álgebra. 1. Números naturales. _ Significado y uso en distintos contextos. _ El sistema de numeración decimal. 2. Operaciones con los números
Matemáticas Discretas
 Coordinación de Ciencias Computacionales - INAOE Matemáticas Discretas Cursos Propedéuticos 2011 Ciencias Computacionales INAOE Dr. Enrique Muñoz de Cote jemc@inaoep.mx http://ccc.inaoep.mx/~jemc Oficina
Coordinación de Ciencias Computacionales - INAOE Matemáticas Discretas Cursos Propedéuticos 2011 Ciencias Computacionales INAOE Dr. Enrique Muñoz de Cote jemc@inaoep.mx http://ccc.inaoep.mx/~jemc Oficina
Título de la acción de capacitación: Ingeniería de Confiabilidad
 Ingeniería de Confiabilidad Hoja 1 de 6 Título de la acción de capacitación: Ingeniería de Confiabilidad I.- Introducción: Uno de los retos más importantes para los profesionales de hoy consiste en desarrollar
Ingeniería de Confiabilidad Hoja 1 de 6 Título de la acción de capacitación: Ingeniería de Confiabilidad I.- Introducción: Uno de los retos más importantes para los profesionales de hoy consiste en desarrollar
PROGRAMACIÓN DEL PROYECTO
 PROGRAMACIÓN DEL PROYECTO Objetivo Representar mediante un cronograma la entrega del alcance (delimitación) del proyecto Desarrollo del cronograma comprende: Definir Actividades Secuenciar Actividades
PROGRAMACIÓN DEL PROYECTO Objetivo Representar mediante un cronograma la entrega del alcance (delimitación) del proyecto Desarrollo del cronograma comprende: Definir Actividades Secuenciar Actividades
Objetivos. Aprender a construir gráficos p y/o np. Aprender a construir gráficos c y u. Cuando usarlos. Epígrafes
 Objetivos Aprender a construir gráficos p y/o np. Aprender a construir gráficos c y u. Cuando usarlos Epígrafes Introducción a los Gráficos p, np. Interpretación Gráficos c y u. Interpretación 2-1 Gráfico
Objetivos Aprender a construir gráficos p y/o np. Aprender a construir gráficos c y u. Cuando usarlos Epígrafes Introducción a los Gráficos p, np. Interpretación Gráficos c y u. Interpretación 2-1 Gráfico
Programa Bioinformática. Máster en Biofísica
 Programa Bioinformática. Máster en Biofísica 2013 2014 Resumen del programa: El curso de bioinformática está finalizado a introducir las técnicas y las herramientas de la bioinformática que pueden ser
Programa Bioinformática. Máster en Biofísica 2013 2014 Resumen del programa: El curso de bioinformática está finalizado a introducir las técnicas y las herramientas de la bioinformática que pueden ser
Detección y segmentación de objetos
 24 de abril de 2013 ¾Qué es segmentación? Segmentación Objetivo El objetivo de la segmentación de una imagen es el agrupamiento de ciertos píxeles de la imagen en regiones correspondientes a objetos contenidos
24 de abril de 2013 ¾Qué es segmentación? Segmentación Objetivo El objetivo de la segmentación de una imagen es el agrupamiento de ciertos píxeles de la imagen en regiones correspondientes a objetos contenidos
DISEÑO CURRICULAR ESTADÍSTICA III
 UNIVERSIDAD NUEVA ESPARTA FACULTAD DE CIENCIAS DE LA INFORMATICA ESCUELA DE COMPUTACION DISEÑO CURRICULAR ESTADÍSTICA III ESCUELA DE COMPUTACIÓN CÓDIGO DE LA ESCUELA: 10-0762-2 ASIGNATURA: Estadística
UNIVERSIDAD NUEVA ESPARTA FACULTAD DE CIENCIAS DE LA INFORMATICA ESCUELA DE COMPUTACION DISEÑO CURRICULAR ESTADÍSTICA III ESCUELA DE COMPUTACIÓN CÓDIGO DE LA ESCUELA: 10-0762-2 ASIGNATURA: Estadística
INDICE Prefacio 1. Introducción 2. Fundamentos de la imagen digital
 INDICE Prefacio XVII 1. Introducción 1.1. Fundamentos 1 1.2. Representación digital de imágenes 6 1.3. Etapas fundamentales del procesamiento de imágenes 8 1.4. Elementos de los sistemas de procesamiento
INDICE Prefacio XVII 1. Introducción 1.1. Fundamentos 1 1.2. Representación digital de imágenes 6 1.3. Etapas fundamentales del procesamiento de imágenes 8 1.4. Elementos de los sistemas de procesamiento
Inteligencia Artificial e Ingeniería del Conocimiento
 Inteligencia Artificial e Ingeniería del Conocimiento I. A. Clásica Nuevos enfoques de la I. A. Agentes Inteligentes Aprendizaje Introducción Aprendizaje inductivo decisión Planteamiento conectivista.
Inteligencia Artificial e Ingeniería del Conocimiento I. A. Clásica Nuevos enfoques de la I. A. Agentes Inteligentes Aprendizaje Introducción Aprendizaje inductivo decisión Planteamiento conectivista.
Algoritmo de eliminación de variables - Factores
 Algoritmo de eliminación de variables Algoritmo de eliminación de variables - Factores Un factor corresponde a la probabilidad de un conjunto de variables dadas las variables ocultas Se representa por
Algoritmo de eliminación de variables Algoritmo de eliminación de variables - Factores Un factor corresponde a la probabilidad de un conjunto de variables dadas las variables ocultas Se representa por
LA MINERÍA DE DATOS APLICADA A LA BÚSQUEDA DE PATRONES DE SUPERVIVIENCIA EN LA NEOPLASIA MALIGNA DE TRÁQUEA, BRONQUIOS Y PULMÓN
 LA MINERÍA DE DATOS APLICADA A LA BÚSQUEDA DE PATRONES DE SUPERVIVIENCIA EN LA NEOPLASIA MALIGNA DE TRÁQUEA, BRONQUIOS Y PULMÓN Miguel Ángel Negrín; Christian González; Jaime Pinilla; Francisco-José Vázquez-Polo
LA MINERÍA DE DATOS APLICADA A LA BÚSQUEDA DE PATRONES DE SUPERVIVIENCIA EN LA NEOPLASIA MALIGNA DE TRÁQUEA, BRONQUIOS Y PULMÓN Miguel Ángel Negrín; Christian González; Jaime Pinilla; Francisco-José Vázquez-Polo
PFC: Localización de robots mediante filtro de Kalman
 6.- FILTRO DE KALMAN 6.1.- MOTIVACIÓN Los sistemas de navegación se han convertido en un estándar, ya que se venden más y más, sobre todo con los coches nuevos. La mayoría de estos sistemas de navegación
6.- FILTRO DE KALMAN 6.1.- MOTIVACIÓN Los sistemas de navegación se han convertido en un estándar, ya que se venden más y más, sobre todo con los coches nuevos. La mayoría de estos sistemas de navegación
Conceptos por nombre. Giros medidos. Detección de obstáculos. Engranajes Ruedas y. distancia X X X X X X X X X X X X X X X X X X X X X X X X X
 Conceptos por nombre Palmada de puesta en marcha, palmada d Seguir las líneas de Ruedas y distancia Frecuencia frente a Rastreo más rápido Matemáticas Pre Álgebra Medias y Umbrales (promedios) Fracciones
Conceptos por nombre Palmada de puesta en marcha, palmada d Seguir las líneas de Ruedas y distancia Frecuencia frente a Rastreo más rápido Matemáticas Pre Álgebra Medias y Umbrales (promedios) Fracciones
CI2355 Almacenes de datos y OLAP
 CI2355 Almacenes de datos y OLAP Examen Lunes, 7 de mayo de 2012 2012/03/26 CI2355 - Almacenes de datos y OLAP 2 Trabajo de Investigación Presentación Artículo 40-45 minutos Fechas: Entre el 14 de mayo
CI2355 Almacenes de datos y OLAP Examen Lunes, 7 de mayo de 2012 2012/03/26 CI2355 - Almacenes de datos y OLAP 2 Trabajo de Investigación Presentación Artículo 40-45 minutos Fechas: Entre el 14 de mayo
Pronósticos e Intervención en Sistemas Dinámicos de Flujo. Liliana Figueroa Quiroz
 Pronósticos e Intervención en Sistemas Dinámicos de Flujo Liliana Figueroa Quiroz Seminario Aleatorio I T A M Marzo 2005 Motivación Redes Dinámicas de Flujo Modelos Estadísticos de Flujos en Redes Redes
Pronósticos e Intervención en Sistemas Dinámicos de Flujo Liliana Figueroa Quiroz Seminario Aleatorio I T A M Marzo 2005 Motivación Redes Dinámicas de Flujo Modelos Estadísticos de Flujos en Redes Redes
Inteligencia Artificial
 Inteligencia Artificial Conocimiento y razonamiento 4. Otras representaciones de conocimiento Dr. Edgard Iván Benítez Guerrero 1 Representación del conocimiento La inteligencia de un agente radica principalmente
Inteligencia Artificial Conocimiento y razonamiento 4. Otras representaciones de conocimiento Dr. Edgard Iván Benítez Guerrero 1 Representación del conocimiento La inteligencia de un agente radica principalmente
Simulación de eventos discretos.
 Simulación de eventos discretos http://humberto-r-alvarez-a.webs.com Qué es simulación? Consiste en diseñar y desarrollar un modelo computarizado de un sistema o proceso y conducir experimentalmente con
Simulación de eventos discretos http://humberto-r-alvarez-a.webs.com Qué es simulación? Consiste en diseñar y desarrollar un modelo computarizado de un sistema o proceso y conducir experimentalmente con