Programación de Algoritmos para Sistemas Robóticos
|
|
|
- José Villanueva Contreras
- hace 8 años
- Vistas:
Transcripción
1 ni.com

2 Programación de Algoritmos para Sistemas Robóticos National Instruments

3 NI LabVIEW 2012 Programación gráfica y basada en texto Funciones de control y análisis integradas Programación multinúcleo Una herramienta de software para PC, hardware embebido y FPGA 3



4 Papel de LabVIEW en la Educación Primaria Preparatoria Universidad Posgrado e Investigación Jardín de Niños Aeroespacial Aprendizaje Basado en Proyectos, HOs 4

5 LabVIEW / RIO para Robótica Virginia Tech (LabVIEW + CompactRIO) Solución Personalizada MIT (C con cluster Linux 40 núcleos) NI reduce notablemente el costo de diseño, desarrollo y pruebas de sistemas robóticos. 5

6 NI ya es exitoso en robótica y sistemas autónomo, sin embargo Queremos ofrecer más a los diseñadores de Sistemas Autónomos/Móviles 6

7 Cómo aprovecho LabVIEW Robotics? Una plataforma para diseño de sistemas robóticos sofisticados Librerías de adquisición y procesamiento de imágenes Conectividad a sensores y actuadores de terceros Despliegue en hardware FPGA y Tiempo Real Algoritmos de navegación y planeación de ruta Protocolos JAUS, I2C, SPI y Ethernet para comunicación Algoritmos de cinemática y dirección 7



8 LabVIEW Robotics en Hardware NI RIO Sensores Tiempo Real Planeación Ruta, comportamiento y movimiento Percepción Identificación de Objetos y Localización I/O FPGA Seguridad, filtros, control y movimiento I/O Interfaz Usuario Monitoreo, control opcional Sensores Actuadore s 8

9 LabVIEW en la Construcción de un Robot Móvil 9


10 LabVIEW Robotics Nueva Experiencia de Usuario 10



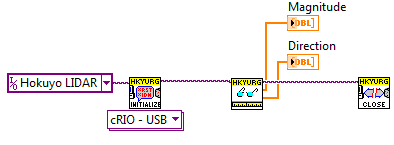
11 Conectividad a Sensores Voltaje Analógico Datos Digitales LIDAR GPS Infrarrojo Ultrasónico Cámara IMU Brújula 11



12 Conectividad a Sensores Simulación de entradas de sensores y salida a motores para probar algoritmos como mapeo, dirección mecánica y planeación de ruta, y luego usar el mismo código en hardware. Soporte para: NI LabVIEW Robotics Starter Kit 1.1 y 2.0 Plataforma FRC Plataforma irobot Create 12


13 Simulador de Ambiente Basado en Física La Simulación permite a los desarrolladores probar código mucho más rápido que usando el hardware real. Ambiente de simulación basado en Open Dynamics Engine. 13

14 Implementación de Algoritmos Robóticos: Cuadrícula de Ocupación y A*,AD* Diagrama de Voronoi Mapeo y Visualización 3D Histograma Vector Campo (VFH) 15



15 Capacidades de Visión Rastreo de color Rastreo patrones Análisis de visión personalizado NI Vision Development Module 16



16 Funciones para Brazos Robóticos Definición para brazos seriales Cálculo Jacobiano Cálculo torque Cinemática Cinemática directa Cinemática inversa Visualización 3D 17

17 NI LabVIEW Robotics Starter Kit 1.1 Plataforma de robot móvil completa Prototipos y enseñanza de robótica Incluye NI Single-Board RIO, motores, encoders, sensor ultrasónico rotatorio Complemento con sensores adicionales, actuadores y manipuladores 18


18 NI LabVIEW Robotics Starter Kit 2.0 Nueva distribución de las ruedas para mejorar la transmisión Se actualiza del sbrio-9631 a sbrio-9632 para mayor poder de procesamiento y memoria Mayor número de canales TETRIX expuestos para personalizar los robots al añadir sensores y otros componentes robóticos. Starter Kit API para interactuar con el robot si necesidad de programar FPGA (también disponible para la versión anterior) 19

19 NI Robotics CompactRIO para Enseñanza e Investigación El controlador CompactRIO y el paquete de E/S con el software LabVIEW usados en FRC Se integra con el Paquete AndyMark de Partes para una plataforma completa de robótica APIs de software y ejemplos para recuperar datos desde sensores y actuadores de control Módulos de E/S analógica y digital para conectar a componentes AndyMark 20



20 Componentes Adicionales Pitsco Education Add-On Kits Cursos de Robótica www. shop.pitsco.com/dani Curso disponible desde la página del producto en: ni.com/robotics 21

21 Otras Funciones Conectividad MobileRobots, Skilligent API Interfaces Digitales FPGA I2C SPI RS-232 Decodificador NEMA GPS Ejemplos y Guías 22

22 LabVIEW Robotics
23 Comunidades 24


24 Tutoriales y Demos 25

25 Video Guías 26

26 Cómo introducir esto al salón de clases? Experimentos de Medición y Automatización escritos por educadores en laboratorios al rededor del mundo. GRATIS para bajar de la red, fáciles de usar y de modificar, que contienen: Lista completa de equipamiento e instrucciones de instalación. VIs de LabVIEW y la lista de referencias usadas por el autor. Sección completa para estudiantes con objetivos, teoría, procedimientos de laboratorio y más. También contamos con material para: Biomédica Química Computación Eléctrica Mecánica Física NI ELVIS ni.com/courseware/esa 27

27 Comunidad Académica ni.com/comunidadacademica 28
 221-6787 Santiago.wiff@ni.com Ing.")
 440-5225/ 221 6798 sociedad.")
28 Interesado en nuestros Productos? Interesado en nuestros productos? Contacte a Ing. Santiago Wiff Fax 51 (1) Santiago.wiff@ni.com Ing. Santiago Wiff National Instruments Ingeniero de Campo Académico Chile y Cono Sur Sociedad Inducontrol Ingeniería S.A.C Tel. 51 (1) / sociedad.inducontrol@inducontrol.co m.pe 29
LabVIEW Robotics: Nueva Plataforma para Desarrollo de Robots en la Investigación y la Industria
 LabVIEW Robotics: Nueva Plataforma para Desarrollo de Robots en la Investigación y la Industria Arturo Vargas Gerente Programa Académico National Instruments México NI LabVIEW 2010 Programación gráfica
LabVIEW Robotics: Nueva Plataforma para Desarrollo de Robots en la Investigación y la Industria Arturo Vargas Gerente Programa Académico National Instruments México NI LabVIEW 2010 Programación gráfica
Programación y Desarrollo de Sistemas Robóticos
 Programación y Desarrollo de Sistemas Robóticos Ing. Salvador Mikel Gerente del Grupo Académico National Instruments de México Procesamiento de Imágenes Control deterministico en Tiempo Real Control DOF
Programación y Desarrollo de Sistemas Robóticos Ing. Salvador Mikel Gerente del Grupo Académico National Instruments de México Procesamiento de Imágenes Control deterministico en Tiempo Real Control DOF
Plataformas Educativas para Hacer Ingeniería. Alberto González Ingeniero de Campo Académico
 Plataformas Educativas para Hacer Ingeniería Alberto González Ingeniero de Campo Académico Agenda Aprendizaje Basado en Proyectos Introducción a NI LabVIEW Plataformas de Enseñanza con NI ELVIS II y NI
Plataformas Educativas para Hacer Ingeniería Alberto González Ingeniero de Campo Académico Agenda Aprendizaje Basado en Proyectos Introducción a NI LabVIEW Plataformas de Enseñanza con NI ELVIS II y NI
El Camino Más Rápido hacia Su Éxito Seminarios de National Instruments. Aprendizaje Práctico Nuevas Tecnologías Expertos Técnicos
 El Camino Más Rápido hacia Su Éxito Seminarios de National Instruments Aprendizaje Práctico Nuevas Tecnologías Expertos Técnicos Más información y demos en ni.com/training/esa Seminarios que se Ajustan
El Camino Más Rápido hacia Su Éxito Seminarios de National Instruments Aprendizaje Práctico Nuevas Tecnologías Expertos Técnicos Más información y demos en ni.com/training/esa Seminarios que se Ajustan
Guía de Productos. Para Instrumentación Virtual. ni.com/bajocosto/mx. Bajo costo Variedad de señales Resultados rápidos
 Guía de Productos Para Instrumentación Virtual Bajo costo Variedad de señales Resultados rápidos ni.com/bajocosto/mx 3384 Mex Prod Flyer.indd 3 3/22/11 6:38:08 PM Dispositivos de Adquisición de Datos para
Guía de Productos Para Instrumentación Virtual Bajo costo Variedad de señales Resultados rápidos ni.com/bajocosto/mx 3384 Mex Prod Flyer.indd 3 3/22/11 6:38:08 PM Dispositivos de Adquisición de Datos para
PORQUÉ TOMAR CURSOS DE PROGRAMACIÓN EN LABVIEW?
 PORQUÉ TOMAR CURSOS DE PROGRAMACIÓN EN LABVIEW? NAVEGANDO EN LA CURVA DE APRENDIZAJE LA CURVA DE APRENDIZAJE DE LABVIEW Uno de los grandes beneficios de es que, siendo una plataforma de desarrollo, y gracias
PORQUÉ TOMAR CURSOS DE PROGRAMACIÓN EN LABVIEW? NAVEGANDO EN LA CURVA DE APRENDIZAJE LA CURVA DE APRENDIZAJE DE LABVIEW Uno de los grandes beneficios de es que, siendo una plataforma de desarrollo, y gracias
CAPÍTULO 1 Instrumentación Virtual
 CAPÍTULO 1 Instrumentación Virtual 1.1 Qué es Instrumentación Virtual? En las últimas décadas se han incrementado de manera considerable las aplicaciones que corren a través de redes debido al surgimiento
CAPÍTULO 1 Instrumentación Virtual 1.1 Qué es Instrumentación Virtual? En las últimas décadas se han incrementado de manera considerable las aplicaciones que corren a través de redes debido al surgimiento
Juan Gil Technical Marketing Engineer
 Tecnologías Esenciales para Control de Máquinas Inteligentes Juan Gil Technical Marketing Engineer El Mundo del Diseño de Máquinas Complejidad y Flexibilidad Economía y Calidad Productos altamente integrados
Tecnologías Esenciales para Control de Máquinas Inteligentes Juan Gil Technical Marketing Engineer El Mundo del Diseño de Máquinas Complejidad y Flexibilidad Economía y Calidad Productos altamente integrados
Getting Started. 1. Introducción. 2. Requerimientos de software
 Getting Started 1. Introducción Este documento presenta la información relevante y los procedimientos requeridos para comenzar a utilizar el software del campeonato, con el fin de implementar la estrategia
Getting Started 1. Introducción Este documento presenta la información relevante y los procedimientos requeridos para comenzar a utilizar el software del campeonato, con el fin de implementar la estrategia
Virtualizando el desarrollo en la Robótica
 Virtualizando el desarrollo en la Robótica para competencias de olimpiadas nacionales e internacionales Aurelio Ramírez Granados FCFM-UANL Facultad de Ciencias Físico Matemáticas Universidad Autónoma de
Virtualizando el desarrollo en la Robótica para competencias de olimpiadas nacionales e internacionales Aurelio Ramírez Granados FCFM-UANL Facultad de Ciencias Físico Matemáticas Universidad Autónoma de
Introducción a LabVIEW FPGA y CompactRIO
 Introducción a LabVIEW FPGA y CompactRIO Familia de Productos Embebidos de LabVIEW Tecnología FPGA Interconexiones Programables Bloques Lógicos Bloques de E/S Importancia de FPGA en Sistemas Alta Confiabilidad
Introducción a LabVIEW FPGA y CompactRIO Familia de Productos Embebidos de LabVIEW Tecnología FPGA Interconexiones Programables Bloques Lógicos Bloques de E/S Importancia de FPGA en Sistemas Alta Confiabilidad
Laboratorios. Remotos
 Workshop Laboratorios Compartidos Laboratorios Remotos Aprendizaje y Entrenamiento a Distancia M. Macías, I. Méndez, E. Guridi Depto. de Ingeniería Eléctrica ITESM, Campus Monterrey La Educación a Distancia
Workshop Laboratorios Compartidos Laboratorios Remotos Aprendizaje y Entrenamiento a Distancia M. Macías, I. Méndez, E. Guridi Depto. de Ingeniería Eléctrica ITESM, Campus Monterrey La Educación a Distancia
Curso práctico on-line de Arduino avanzado
 Curso práctico on-line de Arduino avanzado Implementaciones de lazos de control completos Introducción Hasta hace poco tiempo, el prototipado de sistemas hardware/software para implementación de lazos
Curso práctico on-line de Arduino avanzado Implementaciones de lazos de control completos Introducción Hasta hace poco tiempo, el prototipado de sistemas hardware/software para implementación de lazos
Sistema de Experimentación Virtual y Prototipado para realizar
 TECNOLOGÍA CON LA QUE CUENTA LA UDL Laboratorio de Instrumentación Virtual NI ELVIS II+ y Circuit Design Suite Plataforma Educativa de enseñanza con Tecnología de punta Sistema de Experimentación Virtual
TECNOLOGÍA CON LA QUE CUENTA LA UDL Laboratorio de Instrumentación Virtual NI ELVIS II+ y Circuit Design Suite Plataforma Educativa de enseñanza con Tecnología de punta Sistema de Experimentación Virtual
8 abril 2014 IFEMA Madrid spain.ni.com/nidays. spain.ni.com
 8 abril 2014 IFEMA Madrid /nidays 1 Tendencias y novedades de la arquitectura RIO Matteo Bambini El enfoque de NI hacia el hardware flexible Procesador de Tiempo Real o basado en PC Tecnología FPGA comercial
8 abril 2014 IFEMA Madrid /nidays 1 Tendencias y novedades de la arquitectura RIO Matteo Bambini El enfoque de NI hacia el hardware flexible Procesador de Tiempo Real o basado en PC Tecnología FPGA comercial
Automatización de Adquisición de Datos
 Automatización de Adquisición de Datos Marisol Menéndez Ingeniera de Campo Agenda Introducción a los sistemas de adquisición de datos (DAQ) Introducción a la plataforma NI CompactRIO Adquisición de datos
Automatización de Adquisición de Datos Marisol Menéndez Ingeniera de Campo Agenda Introducción a los sistemas de adquisición de datos (DAQ) Introducción a la plataforma NI CompactRIO Adquisición de datos
Nombre de la asignatura: Robótica Industrial. Carrera: Ingeniería Electrónica
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Robótica Industrial Carrera: Ingeniería Electrónica Clave de la asignatura: Horas teoría - horas práctica créditos: 3 2 8 2.- HISTORIA DEL PROGRAMA Lugar
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Robótica Industrial Carrera: Ingeniería Electrónica Clave de la asignatura: Horas teoría - horas práctica créditos: 3 2 8 2.- HISTORIA DEL PROGRAMA Lugar
La presente tesis pretende que los estudiantes observen la teoría de las acciones de control
 CAPÍTULO V. CONCLUSIONES. La presente tesis pretende que los estudiantes observen la teoría de las acciones de control de forma virtual al mismo tiempo analicen físicamente los sistemas electrónicos cuando
CAPÍTULO V. CONCLUSIONES. La presente tesis pretende que los estudiantes observen la teoría de las acciones de control de forma virtual al mismo tiempo analicen físicamente los sistemas electrónicos cuando
Tema 11: Instrumentación virtual
 Tema 11: Instrumentación virtual Solicitado: Tarea 09: Mapa conceptual: Instrumentación Virtual M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx @edfrancom edgardoadrianfrancom
Tema 11: Instrumentación virtual Solicitado: Tarea 09: Mapa conceptual: Instrumentación Virtual M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx @edfrancom edgardoadrianfrancom
Introducción a Aplicaciones Industriales con LabVIEW FPGA y CompactRIO. Ing. Javier Olea Ing. De Campo Noreste de México National Instruments
 Introducción a Aplicaciones Industriales con LabVIEW FPGA y CompactRIO Ing. Javier Olea Ing. De Campo Noreste de México National Instruments Familia de Productos Embebidos de LabVIEW Tecnología FPGA Interconexiones
Introducción a Aplicaciones Industriales con LabVIEW FPGA y CompactRIO Ing. Javier Olea Ing. De Campo Noreste de México National Instruments Familia de Productos Embebidos de LabVIEW Tecnología FPGA Interconexiones
PORTAFOLIO: Visión Arficial..
 PORTAFOLIO: Visión Arficial.. Camaras In Sight Somos integradores de COGNEX, líder mundial en sistemas de visión artificial para la industria. Los sistemas de visión In-Sight de Cognex son incomparables
PORTAFOLIO: Visión Arficial.. Camaras In Sight Somos integradores de COGNEX, líder mundial en sistemas de visión artificial para la industria. Los sistemas de visión In-Sight de Cognex son incomparables
Facultad De Ingeniería Mecatrónica
 1. Qué es la Ingeniería Mecatrónica? Hoy en día la necesidad de crear procesos de manufactura, bienes de capital o productos cada vez más especializados en el área industrial, así como la creación de productos
1. Qué es la Ingeniería Mecatrónica? Hoy en día la necesidad de crear procesos de manufactura, bienes de capital o productos cada vez más especializados en el área industrial, así como la creación de productos
INGENIERÍA EN MECATRÓNICA
 HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Control lógico avanzado 2. Competencias Desarrollar proyectos de automatización y control, a través del diseño, la administración
HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Control lógico avanzado 2. Competencias Desarrollar proyectos de automatización y control, a través del diseño, la administración
Tecnologías para el Aprendizaje Práctico de Ingenierías Emergentes
 Tecnologías para el Aprendizaje Práctico de Ingenierías Emergentes Alberto González Academia e Investigación National Instruments de México 2 México se localiza en el puesto número 79 de 141 en un ranking
Tecnologías para el Aprendizaje Práctico de Ingenierías Emergentes Alberto González Academia e Investigación National Instruments de México 2 México se localiza en el puesto número 79 de 141 en un ranking
OLIMPO Servidor Universal
 OLIMPO Servidor Universal Documento 20050714/01 Fecha Creación Julio 2005 Fecha Última Revisión Agosto 2007 Versión de documento 2.0 1/7 Visión Global Desde el año 1984, en IGT Microelectronics hemos ofrecido
OLIMPO Servidor Universal Documento 20050714/01 Fecha Creación Julio 2005 Fecha Última Revisión Agosto 2007 Versión de documento 2.0 1/7 Visión Global Desde el año 1984, en IGT Microelectronics hemos ofrecido
INSTITUTO DE EDUCACIÓN SUPERIOR TECNOLÓGICO IBEROTEC SEMESTRE ACADÉMICO: 2014-II SÍLABO
 INSTITUTO DE EDUCACIÓN SUPERIOR TECNOLÓGICO IBEROTEC SEMESTRE ACADÉMICO: 2014-II 1. DATOS GENERALES SÍLABO UNIDAD DIDÁCTICA : APLICACIONES PARA MICROCONTROLADORES Y ROBÓTICA MÓDULO : DESARROLLO CON MICROCONTROLADORES
INSTITUTO DE EDUCACIÓN SUPERIOR TECNOLÓGICO IBEROTEC SEMESTRE ACADÉMICO: 2014-II 1. DATOS GENERALES SÍLABO UNIDAD DIDÁCTICA : APLICACIONES PARA MICROCONTROLADORES Y ROBÓTICA MÓDULO : DESARROLLO CON MICROCONTROLADORES
Butia / XO. plataforma robótica educativa. Instituto de Computación Facultad de Ingeniería
 Butia / XO plataforma robótica educativa Instituto de Computación Facultad de Ingeniería Contenido Introducción robótica. Proyecto Butia. Presentación del curso. Definición de Robot Un robot industrial
Butia / XO plataforma robótica educativa Instituto de Computación Facultad de Ingeniería Contenido Introducción robótica. Proyecto Butia. Presentación del curso. Definición de Robot Un robot industrial
Universidad de Guadalajara Tópicos Selectos.
 Práctica 2.-La plataforma NI ELVIS II y LabVIEW Integrantes del equipo (Máximo 2): 1.- Código: 2.- Código: Fecha límite de entrega: Fecha real de entrega: No. de Estación de Trabajo: Resumen de la práctica:
Práctica 2.-La plataforma NI ELVIS II y LabVIEW Integrantes del equipo (Máximo 2): 1.- Código: 2.- Código: Fecha límite de entrega: Fecha real de entrega: No. de Estación de Trabajo: Resumen de la práctica:
Conecte LabVIEW a Cualquier Red Industrial y PLCs
 Conecte LabVIEW a Cualquier Red Industrial y PLCs 1 Agenda Aspectos generales de comunicaciones industriales Porqué conectar LabVIEW a redes industriales y PLCs? E/S analógicas y digitales básicas Comunicación
Conecte LabVIEW a Cualquier Red Industrial y PLCs 1 Agenda Aspectos generales de comunicaciones industriales Porqué conectar LabVIEW a redes industriales y PLCs? E/S analógicas y digitales básicas Comunicación
IMPLEMENTACIÓN DE LAS NTIC S EN LOS LABORATORIOS DE CIENCIAS NATURALES MEDIANTE EL USO DE LA PLATAFORMA ARDUINO- PHYSICSSENSOR
 IMPLEMENTACIÓN DE LAS NTIC S EN LOS LABORATORIOS DE CIENCIAS NATURALES MEDIANTE EL USO DE LA PLATAFORMA ARDUINO- PHYSICSSENSOR MSc.Diego Aristizábal, Ing. Tatiana Muñoz {daristiz, tcmunoz}@unal.edu.co
IMPLEMENTACIÓN DE LAS NTIC S EN LOS LABORATORIOS DE CIENCIAS NATURALES MEDIANTE EL USO DE LA PLATAFORMA ARDUINO- PHYSICSSENSOR MSc.Diego Aristizábal, Ing. Tatiana Muñoz {daristiz, tcmunoz}@unal.edu.co
Development of an upper level software of a ceiling mounted home prototype robot
 UNIVERSIDAD CARLOS III DE MADRID AALTO UNIVERSITY: SCHOOL OF SCIENCE AND TECHNOLOGY Development of an upper level software of a ceiling mounted home prototype robot Miguel Pérez Cardoso Contenido 1. Objetivo...
UNIVERSIDAD CARLOS III DE MADRID AALTO UNIVERSITY: SCHOOL OF SCIENCE AND TECHNOLOGY Development of an upper level software of a ceiling mounted home prototype robot Miguel Pérez Cardoso Contenido 1. Objetivo...
Esta presentación. Pablo González-Nalda Ismael Etxeberria-Agiriano Isidro Calvo
 Modelo exible, modular, estándar, libre y asequible para el control de CPS aplicado a la robótica móvil Flexible, Modular, Standard, Free and Aordable Model for CPS Control Applied to Mobile Robotics Pablo
Modelo exible, modular, estándar, libre y asequible para el control de CPS aplicado a la robótica móvil Flexible, Modular, Standard, Free and Aordable Model for CPS Control Applied to Mobile Robotics Pablo
Créditos: 3 Horas Presenciales del estudiante: 22,5 Horas No Presenciales del estudiante: 52,5 Total Horas: 75 UTILIZACIÓN DE LA PLATAFORMA VIRTUAL:
 Pag. 1 de 7 GUÍA DOCENTE CURSO: 2015-16 DATOS BÁSICOS DE LA ASIGNATURA Asignatura: Diseño de Robótica Industrial. (UAL) Código de asignatura: 70553217 Plan: Máster en Representación y Diseño en Ingeniería
Pag. 1 de 7 GUÍA DOCENTE CURSO: 2015-16 DATOS BÁSICOS DE LA ASIGNATURA Asignatura: Diseño de Robótica Industrial. (UAL) Código de asignatura: 70553217 Plan: Máster en Representación y Diseño en Ingeniería
ARLEY ANTONIO MANRIQUE QUEVEDO. Presentación realizada para la clase de Seminario de Investigación 2012. Código 20111273014
 IMPLEMENTACION DE UNA APLICACION MOVIL SOBRE SISTEMA OPERATIVO ANDROID PARA LA GESTION REMOTA DEL BRAZO MITSUBISHI RV-M1 PARA EL GRUPO DE INVESTIGACION TELETECNO 1 1 Estudiante Ingeniería Telecomunicaciones
IMPLEMENTACION DE UNA APLICACION MOVIL SOBRE SISTEMA OPERATIVO ANDROID PARA LA GESTION REMOTA DEL BRAZO MITSUBISHI RV-M1 PARA EL GRUPO DE INVESTIGACION TELETECNO 1 1 Estudiante Ingeniería Telecomunicaciones
NOMBRE DEL EXPERIMENTO AUTOR CATEGORÍA PALABRAS CLAVE QUÉ SE PRETENDE MOSTRAR? DIRIGIDO A. Construye y Controla tu Robot en un día.
 NOMBRE DEL EXPERIMENTO Construye y Controla tu Robot en un día. AUTOR Juan Antonio Holgado Terriza Marcelino Cabrera Cuevas Jesús Luis Muros Cobos Sandra Rodríguez Valenzuela CATEGORÍA Tecnología PALABRAS
NOMBRE DEL EXPERIMENTO Construye y Controla tu Robot en un día. AUTOR Juan Antonio Holgado Terriza Marcelino Cabrera Cuevas Jesús Luis Muros Cobos Sandra Rodríguez Valenzuela CATEGORÍA Tecnología PALABRAS
Diseño de Sistemas embebidos y comunicaciones: Aplicaciones de telefonía, RF y localización remota. Ing. José Oliden Martínez
 Diseño de Sistemas embebidos y comunicaciones: Aplicaciones de telefonía, RF y localización remota El controlador dentro de un sistema de Control DISPOSITIVO DE MEDICIÓN CONVERSOR ANÁLOGO DIGITAL CONTROLADOR
Diseño de Sistemas embebidos y comunicaciones: Aplicaciones de telefonía, RF y localización remota El controlador dentro de un sistema de Control DISPOSITIVO DE MEDICIÓN CONVERSOR ANÁLOGO DIGITAL CONTROLADOR
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN
 TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Programación visual. 2. Competencias Implementar sistemas
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Programación visual. 2. Competencias Implementar sistemas
SOFTWARE DE SIMULACIÓN EN NEUMÁTICA (LVSIM -PNEU), MODELO 6485
, MODELO 6485") A Fluidos SOFTWARE DE SIMULACIÓN EN NEUMÁTICA (LVSIM -PNEU), MODELO 6485 El Software de simulación en neumática (LVSIM -PNEU) de Lab-Volt, es un programa basado en Windows que cubre el mismo material pedagógico
A Fluidos SOFTWARE DE SIMULACIÓN EN NEUMÁTICA (LVSIM -PNEU), MODELO 6485 El Software de simulación en neumática (LVSIM -PNEU) de Lab-Volt, es un programa basado en Windows que cubre el mismo material pedagógico
15 de Octubre Crowne Plaza Ciudad de México. Simposio Técnico de Medición y Automatización. ni.com/mexico
 15 de Octubre Crowne Plaza Ciudad de México Simposio Técnico de Medición y Automatización ni.com/mexico LabVIEW en la Web Publicación de VIs como Servicios Web Agenda Introducción Descripción General Creando
15 de Octubre Crowne Plaza Ciudad de México Simposio Técnico de Medición y Automatización ni.com/mexico LabVIEW en la Web Publicación de VIs como Servicios Web Agenda Introducción Descripción General Creando
UNIVERSIDAD DE SAN CARLOS DE GUATEMALA FACULTAD DE INGENIERIA ESCUELA DE MECANICA ELECTRICA LABORATORIO DE ELECTRONICA PENSUM COMUNICACIONES 3
 UNIVERSIDAD DE SAN CARLOS DE GUATEMALA FACULTAD DE INGENIERIA ESCUELA DE MECANICA ELECTRICA LABORATORIO DE ELECTRONICA PENSUM COMUNICACIONES 3 ~ 1 ~ ÍNDICE Introducción...página 3 Prácticas LabVolt...página
UNIVERSIDAD DE SAN CARLOS DE GUATEMALA FACULTAD DE INGENIERIA ESCUELA DE MECANICA ELECTRICA LABORATORIO DE ELECTRONICA PENSUM COMUNICACIONES 3 ~ 1 ~ ÍNDICE Introducción...página 3 Prácticas LabVolt...página
PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE VICERRECTORÍA ACADÉMICA
 RESOLUCIÓN Nº111/2012 APRUEBA CREACIÓN DEL MAJOR EN SISTEMAS AUTÓNOMOS Y ROBÓTICOS (INTERDISCIPLINARIO) PARA ALUMNOS DE LA LICENCIATURA EN CIENCIAS DE LA INGENIERÍA 1º Apruébese la creación del Major en
RESOLUCIÓN Nº111/2012 APRUEBA CREACIÓN DEL MAJOR EN SISTEMAS AUTÓNOMOS Y ROBÓTICOS (INTERDISCIPLINARIO) PARA ALUMNOS DE LA LICENCIATURA EN CIENCIAS DE LA INGENIERÍA 1º Apruébese la creación del Major en
Desarrollo de una plataforma de enseñanza de laboratorio para educación a distancia.
 UNIVERSIDAD NACIONAL EXPERIMENTAL POLITECNICA ANTONIO JOSE DE SUCRE VICERRECTORADO PUERTO ORDAZ DEPARTAMENTO DE INGENIERIA ELECTRONICA TRABAJO DE GRADO Desarrollo de una plataforma de enseñanza de laboratorio
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITECNICA ANTONIO JOSE DE SUCRE VICERRECTORADO PUERTO ORDAZ DEPARTAMENTO DE INGENIERIA ELECTRONICA TRABAJO DE GRADO Desarrollo de una plataforma de enseñanza de laboratorio
PROPUESTAS DE PROYECTO ELÉCTRICO PARA EL PRIMER SEMESTRE 2011
 PROPUESTAS DE PROYECTO ELÉCTRICO PARA EL PRIMER SEMESTRE 2011 Profesor Mauricio Espinoza B. Objetivos Propuesta I Diseño de algoritmos de control para los simuladores de Staudinger GMBH de la Escuela de
PROPUESTAS DE PROYECTO ELÉCTRICO PARA EL PRIMER SEMESTRE 2011 Profesor Mauricio Espinoza B. Objetivos Propuesta I Diseño de algoritmos de control para los simuladores de Staudinger GMBH de la Escuela de
PROTECCIÓN DE PERÍMETRO COMPROBADA NUEVA SIMPLICIDAD DE PLATAFORMA ÚNICA.
 SISTEMAS DE DETECCIÓN PERIMETRAL MÁS INTELIGENTES MicroPoint II Sistema de Detección de Cerca MicroTrack II Sistema de Detección de Cable Enterrado MicroWave 330 Barrera de Microondas Digital PROTECCIÓN
SISTEMAS DE DETECCIÓN PERIMETRAL MÁS INTELIGENTES MicroPoint II Sistema de Detección de Cerca MicroTrack II Sistema de Detección de Cable Enterrado MicroWave 330 Barrera de Microondas Digital PROTECCIÓN
DIVISION DE ESTUDIOS DE POSGRADO E INVESTIGACION DOCTORADO EN CIENCIAS EN COMPUTACION SEDE: INSTITUTO TECNOLOGICO DE TIJUANA No 002206
 DIVISION DE ESTUDIOS DE POSGRADO E INVESTIGACION DOCTORADO EN CIENCIAS EN COMPUTACION SEDE: INSTITUTO TECNOLOGICO DE TIJUANA No 002206 MEDIOS DE VERIFICACION 4. Infraestructura del Programa Criterio 9.
DIVISION DE ESTUDIOS DE POSGRADO E INVESTIGACION DOCTORADO EN CIENCIAS EN COMPUTACION SEDE: INSTITUTO TECNOLOGICO DE TIJUANA No 002206 MEDIOS DE VERIFICACION 4. Infraestructura del Programa Criterio 9.
Desarrollo y Soluciones Nextio S.A. De C.V. Presentación 2015. La automatización y el desarrollo es la clave para realizar sus procesos con éxito.
 Presentación 2015 La automatización y el desarrollo es la clave para realizar sus procesos con éxito. 2 Servicios 1 2 3 4 5 6 7 8 9 10 11 3 Servicios 1 Procura Suministro de materiales a proyectos específicos.
Presentación 2015 La automatización y el desarrollo es la clave para realizar sus procesos con éxito. 2 Servicios 1 2 3 4 5 6 7 8 9 10 11 3 Servicios 1 Procura Suministro de materiales a proyectos específicos.
TFM Comunicación, Redes y Gestión de Contenidos
 TFM Comunicación, Redes y Gestión de Contenidos Aplicación móvil hibrida para control de asistencia y servicio técnico a domicilio y gestión de partes de trabajo Autor: Patricia Paguay Lara Tutorizado
TFM Comunicación, Redes y Gestión de Contenidos Aplicación móvil hibrida para control de asistencia y servicio técnico a domicilio y gestión de partes de trabajo Autor: Patricia Paguay Lara Tutorizado
6 de Mayo Bogotá, Colombia. ni.com/colombia 01 8000 513680 o (1) 482.4888
 482.4888") 6 de Mayo Bogotá, Colombia ni.com/colombia 01 8000 513680 o (1) 482.4888 Diseño y Simulación de Control y Código Matemático con LabVIEW Carlos Pazos Technical Marketing Engineer National Instruments Mexico
6 de Mayo Bogotá, Colombia ni.com/colombia 01 8000 513680 o (1) 482.4888 Diseño y Simulación de Control y Código Matemático con LabVIEW Carlos Pazos Technical Marketing Engineer National Instruments Mexico
Capítulo 5 Programación del algoritmo en LabVIEW
 Programación del algoritmo en LabVIEW En este capítulo se describen las funciones que se emplearon para implementar el control PID wavenet en LabVIEW. El algoritmo wavenet fue implementado en LabVIEW para
Programación del algoritmo en LabVIEW En este capítulo se describen las funciones que se emplearon para implementar el control PID wavenet en LabVIEW. El algoritmo wavenet fue implementado en LabVIEW para
Experiencia docente en el desarrollo de aplicaciones empotradas
 Experiencia docente en el desarrollo de aplicaciones empotradas con MarteOS Silvia Terrasa, Patricia Balbastre, Alfons Crespo Dept. de Informática de Sistemes y Computadores Universidad Politécnica de
Experiencia docente en el desarrollo de aplicaciones empotradas con MarteOS Silvia Terrasa, Patricia Balbastre, Alfons Crespo Dept. de Informática de Sistemes y Computadores Universidad Politécnica de
UNIDAD DE APOYO LABORATORIO VIRTUAL DE MATEMÁTICAS Y FÍSICA COORDINADOR: LUBÍN ERNESTO GARCÍA VILLALBA
 UNIDAD DE APOYO LABORATORIO VIRTUAL DE MATEMÁTICAS Y FÍSICA COORDINADOR: LUBÍN ERNESTO GARCÍA VILLALBA FACULTAD CIENCIAS DE LA EDUCACIÓN PROGRAMA LICENCIATURA EN MATEMÁTICAS Y FÍSICA 2014 CONTENIDO PRESENTACIÓN...
UNIDAD DE APOYO LABORATORIO VIRTUAL DE MATEMÁTICAS Y FÍSICA COORDINADOR: LUBÍN ERNESTO GARCÍA VILLALBA FACULTAD CIENCIAS DE LA EDUCACIÓN PROGRAMA LICENCIATURA EN MATEMÁTICAS Y FÍSICA 2014 CONTENIDO PRESENTACIÓN...
CAPITULO III MARCO METODOLÓGICO. La presente investigación plantea como objetivo el diseño de un prototipo
 CAPITULO III MARCO METODOLÓGICO 1. Tipo de Investigación La presente investigación plantea como objetivo el diseño de un prototipo de robot industrial para la automatización del proceso de conformado de
CAPITULO III MARCO METODOLÓGICO 1. Tipo de Investigación La presente investigación plantea como objetivo el diseño de un prototipo de robot industrial para la automatización del proceso de conformado de
TECNÓLOGO EN DESARROLLO DE SOFTWARE
 PERFIL DE EGRESO Diseña, codifica, desarrolla e implementa software a la medida, web y móvil, de manera segura bajo los estándares internacionales; Diseña, gestiona, administra y da mantenimiento a infraestructuras
PERFIL DE EGRESO Diseña, codifica, desarrolla e implementa software a la medida, web y móvil, de manera segura bajo los estándares internacionales; Diseña, gestiona, administra y da mantenimiento a infraestructuras
8 abril 2014 IFEMA Madrid spain.ni.com/nidays. spain.ni.com
 8 abril 2014 IFEMA Madrid /nidays 1 Cómo elegir las herramientas software para diseñar un sistema de test David Sierra Support and Services Manager National Instruments Spain Instrumentos modulares definidos
8 abril 2014 IFEMA Madrid /nidays 1 Cómo elegir las herramientas software para diseñar un sistema de test David Sierra Support and Services Manager National Instruments Spain Instrumentos modulares definidos
LABORATORIO REMOTO DE MÁQUINAS DE CORRIENTE ALTERNA
 LABORATORIO REMOTO DE MÁQUINAS DE CORRIENTE ALTERNA Calidad y Materiales educativos y Herramientas Tecnológicas en Educación a Distancia Chacón Rafael, Hernández Edwin rafa.anto@gmail.com, edwingh@hotmail.com
LABORATORIO REMOTO DE MÁQUINAS DE CORRIENTE ALTERNA Calidad y Materiales educativos y Herramientas Tecnológicas en Educación a Distancia Chacón Rafael, Hernández Edwin rafa.anto@gmail.com, edwingh@hotmail.com
Sistema de Monitoreo con Sensores Móviles usando Tecnología de Arquitectura Modular. Centro de Modelamiento Matemático Universidad de Chile
 Sistema de Monitoreo con Sensores Móviles usando Tecnología de Arquitectura Modular Centro de Modelamiento Matemático Universidad de Chile Julio, 2012 Agenda Introducción Etapa previa: Conceptualización
Sistema de Monitoreo con Sensores Móviles usando Tecnología de Arquitectura Modular Centro de Modelamiento Matemático Universidad de Chile Julio, 2012 Agenda Introducción Etapa previa: Conceptualización
Cuerpo Académico: Tecnologías para el Control y la Automatización
 Cuerpo Académico: Tecnologías para el Control y la Automatización Integrantes: M.C. Jorge García Aguirre Ing. Magdalena Villar Salvador Ing. Miguel Ángel Bonilla Téllez M.C. Marco Antonio Sobrevilla González
Cuerpo Académico: Tecnologías para el Control y la Automatización Integrantes: M.C. Jorge García Aguirre Ing. Magdalena Villar Salvador Ing. Miguel Ángel Bonilla Téllez M.C. Marco Antonio Sobrevilla González
Robótica para Niños. Robótica para Niños. Programa del Taller de Robótica Educativa. Versión 2. Robot t-17. Versión 2
 Programa del Taller de Robótica Educativa Robot t-7 6 04 03 I. DESCRIPCIÓN DEL TALLER La Robótica permite fundir, en forma natural y espontánea, elementos tecnológicos, mecánicos y eléctricos, generando
Programa del Taller de Robótica Educativa Robot t-7 6 04 03 I. DESCRIPCIÓN DEL TALLER La Robótica permite fundir, en forma natural y espontánea, elementos tecnológicos, mecánicos y eléctricos, generando
SISTEMA BIOMETRICO MULTIFUNCIONAL DE MONITOREO DEL ESTADO DE SALUD DE LAS PERSONAS SBMMS. Relizado por: Ing. Fabián Zúñiga
 SISTEMA BIOMETRICO MULTIFUNCIONAL DE MONITOREO DEL ESTADO DE SALUD DE LAS PERSONAS SBMMS Relizado por: Ing. Fabián Zúñiga Objetivos del SBMMS: - Lograr llevar un control remoto (a distancia) de la salud
SISTEMA BIOMETRICO MULTIFUNCIONAL DE MONITOREO DEL ESTADO DE SALUD DE LAS PERSONAS SBMMS Relizado por: Ing. Fabián Zúñiga Objetivos del SBMMS: - Lograr llevar un control remoto (a distancia) de la salud
Informe final Proyecto de Innovación Docente ID11/129. Uso de FPGAs y medios audiovisuales en la docencia de la Electrónica Digital
 Informe final Proyecto de Innovación Docente ID11/129 Uso de FPGAs y medios audiovisuales en la docencia de la Electrónica Digital Participantes: Beatriz García Vasallo Raúl Rengel Estévez Miguel Ángel
Informe final Proyecto de Innovación Docente ID11/129 Uso de FPGAs y medios audiovisuales en la docencia de la Electrónica Digital Participantes: Beatriz García Vasallo Raúl Rengel Estévez Miguel Ángel
DIPLOMA DE SISTEMAS ROBÓTICOS MÓVILES
 DIPLOMA DE SISTEMAS ROBÓTICOS MÓVILES Autores: Álvaro Sánchez Fidel Fernández José Porras Fecha: 15 Febrero de 2007 Versión: 1.2 Objetivo El objetivo transversal general del diploma es el desarrollo de
DIPLOMA DE SISTEMAS ROBÓTICOS MÓVILES Autores: Álvaro Sánchez Fidel Fernández José Porras Fecha: 15 Febrero de 2007 Versión: 1.2 Objetivo El objetivo transversal general del diploma es el desarrollo de
Software de Simulación aplicado a entornos de e-learning
 Software de Simulación aplicado a entornos de e-learning 2009 Laboratorio de Investigación de Software Universidad Tecnológica Nacional Facultad Regional Córdoba Titulo del Proyecto Software de Simulación
Software de Simulación aplicado a entornos de e-learning 2009 Laboratorio de Investigación de Software Universidad Tecnológica Nacional Facultad Regional Córdoba Titulo del Proyecto Software de Simulación
Nombre de la asignatura: Línea de investigación o de trabajo: Horas teoría-horas prácticas-horas trabajo adicional-horas totales-créditos
 ASIGNATURA: Robótica 1. DATOS DE LA ASIGNATURA Nombre de la asignatura: Línea de investigación o de trabajo: Robótica Horas teoría-horas prácticas-horas trabajo adicional-horas totales-créditos 32 32 64
ASIGNATURA: Robótica 1. DATOS DE LA ASIGNATURA Nombre de la asignatura: Línea de investigación o de trabajo: Robótica Horas teoría-horas prácticas-horas trabajo adicional-horas totales-créditos 32 32 64
SISTEMAS DE INFORMACIÓN PARA ADMINISTRACIÓN DE OPERACIONES. Manufactura Integrada por Computadora (CIM) Qué es es CIM?
 Qué es es CIM?") SISTEMAS DE INFORMACIÓN PARA ADMINISTRACIÓN DE OPERACIONES 2003 Manufactura Integrada por Computadora (CIM) Qué es es CIM? Bajo el nombre de CIM se engloba a un conjunto de aplicaciones informáticas cuyo
SISTEMAS DE INFORMACIÓN PARA ADMINISTRACIÓN DE OPERACIONES 2003 Manufactura Integrada por Computadora (CIM) Qué es es CIM? Bajo el nombre de CIM se engloba a un conjunto de aplicaciones informáticas cuyo
SIMULACION DE UN ENTORNO Y MEMORIA VIRTUAL PARA UNA PLATAFORMA KHEPERA. Leonardo Solaque Nelson D. Muñoz Nelson Londoño Ospina
 SIMULACION DE UN ENTORNO Y MEMORIA VIRTUAL PARA UNA PLATAFORMA KHEPERA Leonardo Solaque Nelson D. Muñoz Nelson Londoño Ospina GIRA 2 (Grupo de Investigación en Robótica y Areas Afines) Universidad de Antioquia
SIMULACION DE UN ENTORNO Y MEMORIA VIRTUAL PARA UNA PLATAFORMA KHEPERA Leonardo Solaque Nelson D. Muñoz Nelson Londoño Ospina GIRA 2 (Grupo de Investigación en Robótica y Areas Afines) Universidad de Antioquia
CAPITULO III PROPUESTA DE SOLUCION.
 CAPITULO III PROPUESTA DE SOLUCION. 1.- Definición de la Propuesta. La propuesta de solución esta orientada a la implementación de una alternativa comunicación de bajo costo para el personal de la Fuerza
CAPITULO III PROPUESTA DE SOLUCION. 1.- Definición de la Propuesta. La propuesta de solución esta orientada a la implementación de una alternativa comunicación de bajo costo para el personal de la Fuerza
Esta materia está compuesta de 10 asignaturas que se imparten entre los cursos 2º, 3º y 4º.
 Denominación de la MATERIA: 12. INGENIERÍA AUTOMÁTICA Créditos ECTS, carácter (básica, obligatoria, optativa ): 30 ECTS obligatorios 30 ECTS optativos Duración y ubicación temporal dentro del plan de estudios:
Denominación de la MATERIA: 12. INGENIERÍA AUTOMÁTICA Créditos ECTS, carácter (básica, obligatoria, optativa ): 30 ECTS obligatorios 30 ECTS optativos Duración y ubicación temporal dentro del plan de estudios:
A Fluidos SOFTWARE DE SIMULACIÓN EN HIDRÁULICA (LVSIM -HYD), MODELO 6385 DESCRIPCIÓN GENERAL
, MODELO 6385 DESCRIPCIÓN GENERAL") A Fluidos SOFTWARE DE SIMULACIÓN EN HIDRÁULICA (LVSIM -HYD), MODELO 6385 El Software de simulación en hidráulica (LVSIM -HYD) de Lab-Volt, es un programa basado en Windows que cubre el mismo material pedagógico
A Fluidos SOFTWARE DE SIMULACIÓN EN HIDRÁULICA (LVSIM -HYD), MODELO 6385 El Software de simulación en hidráulica (LVSIM -HYD) de Lab-Volt, es un programa basado en Windows que cubre el mismo material pedagógico
CATEDRA de PROYECTO FINAL
 UNIVERSIDAD TECNOLOGICA NACIONAL FACULTAD REGIONAL AVELLANEDA CATEDRA de PROYECTO FINAL TITULO DEL PROYECTO: CONTROL DE CAMARAS FRIGORIFICAS TITULO DEL INFORME: MANUAL TÉCNICO PROFESOR(ES): ING. LOPEZ
UNIVERSIDAD TECNOLOGICA NACIONAL FACULTAD REGIONAL AVELLANEDA CATEDRA de PROYECTO FINAL TITULO DEL PROYECTO: CONTROL DE CAMARAS FRIGORIFICAS TITULO DEL INFORME: MANUAL TÉCNICO PROFESOR(ES): ING. LOPEZ
Acelere el Control de Máquinas Inteligentes con Visión Artificial y Control de Movimiento Integrados
 Acelere el Control de Máquinas Inteligentes con Visión Artificial y Control de Movimiento Integrados Juan Gil Technical Marketing Engineer Agenda Por qué integrar visión artificial y control de movimiento?
Acelere el Control de Máquinas Inteligentes con Visión Artificial y Control de Movimiento Integrados Juan Gil Technical Marketing Engineer Agenda Por qué integrar visión artificial y control de movimiento?
PROYECTO FIN DE CARRERA
 PROYECTO FIN DE CARRERA SISTEMA DE VISUALIZACIÓN 3D DE BAJO COSTE PARA APLICACIONES DE SIMULACIÓN CON REALIDAD VIRTUAL ELECTRÓNICA INDUSTRIAL ÁREA: PROGRAMACIÓN INDUSTRIAL PROYECTO FIN DE CARRERA 770611A094
PROYECTO FIN DE CARRERA SISTEMA DE VISUALIZACIÓN 3D DE BAJO COSTE PARA APLICACIONES DE SIMULACIÓN CON REALIDAD VIRTUAL ELECTRÓNICA INDUSTRIAL ÁREA: PROGRAMACIÓN INDUSTRIAL PROYECTO FIN DE CARRERA 770611A094
CAPITULO IV. HERRAMIENTAS DE CÓDIGO ABIERTO
 CAPITULO IV. HERRAMIENTAS DE CÓDIGO ABIERTO En la actualidad la mayoría de las grandes empresas cuentan con un sin número de servicios que ofrecen a sus trabajadores y clientes. Muchos de estos servicios
CAPITULO IV. HERRAMIENTAS DE CÓDIGO ABIERTO En la actualidad la mayoría de las grandes empresas cuentan con un sin número de servicios que ofrecen a sus trabajadores y clientes. Muchos de estos servicios
CONTROL DE ACCESO. ExpansE Sistema Distribuido de Control de Acceso
 ExpansE Sistema Distribuido de Control de Acceso ExpansE Sistema de Control de Acceso Distribuido Puntos Clave: Alta Capacidad, Rápido y Potente Arquitectura Distribuida Mientras más puertas instaladas,
ExpansE Sistema Distribuido de Control de Acceso ExpansE Sistema de Control de Acceso Distribuido Puntos Clave: Alta Capacidad, Rápido y Potente Arquitectura Distribuida Mientras más puertas instaladas,
Instalación de Sistemas de Automatización y Datos
 UNIVERSIDADE DE VIGO E. T. S. Ingenieros Industriales 5º Curso Orientación Instalaciones y Construcción Instalación de Sistemas de Automatización y Datos José Ignacio Armesto Quiroga http://www www.disa.uvigo.es/
UNIVERSIDADE DE VIGO E. T. S. Ingenieros Industriales 5º Curso Orientación Instalaciones y Construcción Instalación de Sistemas de Automatización y Datos José Ignacio Armesto Quiroga http://www www.disa.uvigo.es/
Automatización en IQ Administración
 software atmósfera instrumentación quimisur s.l. polígono industrial de servicios del aljarafe (p.i.s.a.) c/ artesanía 23, nave 1- d 41927 mairena del aljarafe (sevilla) tel: 955 600 002 fax: 955 600 003
software atmósfera instrumentación quimisur s.l. polígono industrial de servicios del aljarafe (p.i.s.a.) c/ artesanía 23, nave 1- d 41927 mairena del aljarafe (sevilla) tel: 955 600 002 fax: 955 600 003
SIMULACIÓN EN TIEMPO REAL DE UNA ESTACION DE TRABAJO INDUSTRIAL ROBOTIZADA.
 SIMULACIÓN EN TIEMPO REAL DE UNA ESTACION DE TRABAJO INDUSTRIAL ROBOTIZADA. Mora Sánchez José Antonio, López Flores Miguel Eduardo, Bustillo Díaz Mario Benemérita Universidad Autónoma de Puebla 14 sur
SIMULACIÓN EN TIEMPO REAL DE UNA ESTACION DE TRABAJO INDUSTRIAL ROBOTIZADA. Mora Sánchez José Antonio, López Flores Miguel Eduardo, Bustillo Díaz Mario Benemérita Universidad Autónoma de Puebla 14 sur
PORTAFOLIO DE SERVICIOS INSMEDCONT N M I Y
 PORTAFOLIO DE SERVICIOS INSMEDCONT INSTRU ME NTA CIO N M I ED CION Y C O N T R OL INSMEDCONT Nace en 1997 como una respuesta a la necesidad de mejorar la calidad y aumentar la productividad, disminuyendo
PORTAFOLIO DE SERVICIOS INSMEDCONT INSTRU ME NTA CIO N M I ED CION Y C O N T R OL INSMEDCONT Nace en 1997 como una respuesta a la necesidad de mejorar la calidad y aumentar la productividad, disminuyendo
Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes
 Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes RESUMEN Investigadores de la Universidad
Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes RESUMEN Investigadores de la Universidad
Haz Ingeniería Con Aplicaciones Prácticas
 Haz Ingeniería Con Aplicaciones Prácticas Taller para Estudiantes César Sánchez Academia e Investigación National Instruments de México Graphical System Design con LabVIEW Pruebas Monitoreo Embebido Control
Haz Ingeniería Con Aplicaciones Prácticas Taller para Estudiantes César Sánchez Academia e Investigación National Instruments de México Graphical System Design con LabVIEW Pruebas Monitoreo Embebido Control
ECA - EnergyMonitoring Sistema Plug & play (conectar y usar) de monitorización para determinar el consumo energético medidor - datalogger - plataforma
 de monitorización para determinar el consumo energético medidor - datalogger - plataforma") Sistema Plug & play (conectar y usar) de monitorización para determinar el consumo energético medidor - datalogger - plataforma Saca su beneficio de nuestra experiencia de más de 6 años en Smart Metering
Sistema Plug & play (conectar y usar) de monitorización para determinar el consumo energético medidor - datalogger - plataforma Saca su beneficio de nuestra experiencia de más de 6 años en Smart Metering
Brindamos asesorías que involucran tecnología y personal calificado, estos hacen de DOCTUM su mejor aliado.
 SOFTWARE DE GESTÓN Doctum sabe que es necesario entregar servicios que otorguen un valor agregado, sobre todo para la gestión documental de la empresa, lo que reduce los costos asociados a mano de obra
SOFTWARE DE GESTÓN Doctum sabe que es necesario entregar servicios que otorguen un valor agregado, sobre todo para la gestión documental de la empresa, lo que reduce los costos asociados a mano de obra
La Instrumentación Tradicional:
 Prof. Ing. Juan Suárez JTP. Ing. Guillermo Murcia ATP. Ing. Jorge Strack jsuarez@fi.mdp.edu.ar gjmurcia@fi.mdp.edu.ar jlstrack@fi.mdp.edu.ar La Instrumentación Tradicional: Cuando se habla de instrumentos
Prof. Ing. Juan Suárez JTP. Ing. Guillermo Murcia ATP. Ing. Jorge Strack jsuarez@fi.mdp.edu.ar gjmurcia@fi.mdp.edu.ar jlstrack@fi.mdp.edu.ar La Instrumentación Tradicional: Cuando se habla de instrumentos
Competencias interpersonales: Capacidad crítica y autocrítica. Trabajo en equipo. Habilidades interpersonales
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: SATCA 1 Procesamiento Digital de Señales Ingeniería Electrónica APM-1302 2-4 - 6 2.- PRESENTACIÓN Caracterización del
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: SATCA 1 Procesamiento Digital de Señales Ingeniería Electrónica APM-1302 2-4 - 6 2.- PRESENTACIÓN Caracterización del
Introducción al LabVIEW
 Introducción al LabVIEW Qué es LabVIEW? LabVIEW (Laboratory Virtual Instrument Engineering Workbench) es un entorno de desarrollo basado en programación gráfica. Utiliza símbolos gráficos en lugar de lenguaje
Introducción al LabVIEW Qué es LabVIEW? LabVIEW (Laboratory Virtual Instrument Engineering Workbench) es un entorno de desarrollo basado en programación gráfica. Utiliza símbolos gráficos en lugar de lenguaje
Ingeniería Portatil: NI mydaq. Carlos Pazos Technical Marketing Engineer National Instruments México
 Ingeniería Portatil: NI mydaq Carlos Pazos Technical Marketing Engineer National Instruments México 1 Retos para los Educadores en Ingeniería Los Educadores Tienen Que: Incrementar el número de matrículas
Ingeniería Portatil: NI mydaq Carlos Pazos Technical Marketing Engineer National Instruments México 1 Retos para los Educadores en Ingeniería Los Educadores Tienen Que: Incrementar el número de matrículas
Robots industriales para una ventaja competitiva. Ing. Pedro Francisco Pérez Martínez
 Robots industriales para una ventaja competitiva Ing. Pedro Francisco Pérez Martínez Mundo Altamente Competitivo Actualmente un profesional de la rama de la ingeniería en robótica y mecatrónica debe contar
Robots industriales para una ventaja competitiva Ing. Pedro Francisco Pérez Martínez Mundo Altamente Competitivo Actualmente un profesional de la rama de la ingeniería en robótica y mecatrónica debe contar
Plataforma robótica de bajo coste basada en la arquitectura software Player/Stage y en el hardware de La Fonera
 Plataforma robótica de bajo coste basada en la arquitectura software Player/Stage y en el hardware de La Fonera Guillermo Asín, Julio Pastor Departamento de Electrónica, Universidad de Alcalá Alcalá de
Plataforma robótica de bajo coste basada en la arquitectura software Player/Stage y en el hardware de La Fonera Guillermo Asín, Julio Pastor Departamento de Electrónica, Universidad de Alcalá Alcalá de
Electrónica Digital II
 Electrónica Digital II M. C. Felipe Santiago Espinosa Aplicaciones de los FPLDs Octubre / 2014 Aplicaciones de los FPLDs Los primeros FPLDs se usaron para hacer partes de diseños que no correspondían a
Electrónica Digital II M. C. Felipe Santiago Espinosa Aplicaciones de los FPLDs Octubre / 2014 Aplicaciones de los FPLDs Los primeros FPLDs se usaron para hacer partes de diseños que no correspondían a
UNIVERSIDAD DE SALAMANCA
 UNIVERSIDAD DE SALAMANCA FACULTAD DE CIENCIAS INGENIERÍA TÉCNICA EN INFORMÁTICA DE SISTEMAS Resumen del trabajo práctico realizado para la superación de la asignatura Proyecto Fin de Carrera. TÍTULO SISTEMA
UNIVERSIDAD DE SALAMANCA FACULTAD DE CIENCIAS INGENIERÍA TÉCNICA EN INFORMÁTICA DE SISTEMAS Resumen del trabajo práctico realizado para la superación de la asignatura Proyecto Fin de Carrera. TÍTULO SISTEMA
SAP BusinessObjects Edge BI Standard Package La solución de BI preferida para. Empresas en Crecimiento
 SAP BusinessObjects Edge BI Standard Package La solución de BI preferida para Empresas en Crecimiento Portfolio SAP BusinessObjects Soluciones SAP para Empresas en Crecimiento Resumen Ejecutivo Inteligencia
SAP BusinessObjects Edge BI Standard Package La solución de BI preferida para Empresas en Crecimiento Portfolio SAP BusinessObjects Soluciones SAP para Empresas en Crecimiento Resumen Ejecutivo Inteligencia
Programación de Robots Lego con
 Programación de Robots Lego con LabVIEW Benjamin Celis Ingeniero de Aplicaciones, National Instruments 3 Por qué la Academia? En centros educativos apoyamos el camino de los futuros ingenieros y científicos.
Programación de Robots Lego con LabVIEW Benjamin Celis Ingeniero de Aplicaciones, National Instruments 3 Por qué la Academia? En centros educativos apoyamos el camino de los futuros ingenieros y científicos.
Guía Docente Curso 2007-2008
 ESCUELA POLITECNICA SUPERIOR Guía Docente Curso 2007-2008 Titulación Ingeniería Técnica en Informática de Gestión DATOS DE LA ASIGNATURA * * Asignatura en experiencia piloto de implantación del sistema
ESCUELA POLITECNICA SUPERIOR Guía Docente Curso 2007-2008 Titulación Ingeniería Técnica en Informática de Gestión DATOS DE LA ASIGNATURA * * Asignatura en experiencia piloto de implantación del sistema
CAPÍTULO II. Gráficos Dinámicos.
 2.1 Definición. Los gráficos dinámicos son representaciones a escala del proceso, en donde se muestra la información de las variables del proceso a través de datos numéricos y de animación gráfica. Éstos
2.1 Definición. Los gráficos dinámicos son representaciones a escala del proceso, en donde se muestra la información de las variables del proceso a través de datos numéricos y de animación gráfica. Éstos
POTENCIANDO NEGOCIOS EN TIEMPO REAL. Especificaciones Técnicas
 POTENCIANDO NEGOCIOS EN TIEMPO REAL ontrol es un software multiprotocolo, K. especialmente desarrollado para el mundo de la automatización que de un modo simple, permite medir las variables más relevantes
POTENCIANDO NEGOCIOS EN TIEMPO REAL ontrol es un software multiprotocolo, K. especialmente desarrollado para el mundo de la automatización que de un modo simple, permite medir las variables más relevantes
Sistemas de Teleoperación de Robots Basado en Internet
 Sistemas de Teleoperación de Robots Basado en Internet Nelson D. Muñoz Ceballos Grupo de Investigación en Control Automático y Robótica ICARO Politécnico Colombiano Jaime Isaza Cadavid, Medellín-Colombia
Sistemas de Teleoperación de Robots Basado en Internet Nelson D. Muñoz Ceballos Grupo de Investigación en Control Automático y Robótica ICARO Politécnico Colombiano Jaime Isaza Cadavid, Medellín-Colombia
INGENIERÍA EN MANTENIMIENTO INDUSTRIAL
 HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Visualización y control de procesos 2. Competencias Validar estudios de ingeniería y proyectos técnicoeconómicos mediante
HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Visualización y control de procesos 2. Competencias Validar estudios de ingeniería y proyectos técnicoeconómicos mediante
EXPERIENCIAS DEL PROCESO DE PATENTAMIENTO EN EL IPN
 Instituto Politécnico Nacional Escuela Superior de Ingeniería Mecánica y Eléctrica Día Virtual de la Comunidad de Ingeniería Los procesos de innovación/creatividad gestados en las escuela de ingeniería
Instituto Politécnico Nacional Escuela Superior de Ingeniería Mecánica y Eléctrica Día Virtual de la Comunidad de Ingeniería Los procesos de innovación/creatividad gestados en las escuela de ingeniería
INGENIERÍA EN MECATRÓNICA
 HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Instrumentación Virtual 2. Competencias Desarrollar proyectos de automatización y control, a través del diseño, la administración
HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Instrumentación Virtual 2. Competencias Desarrollar proyectos de automatización y control, a través del diseño, la administración
El Centro de Investigación Científica de Yucatán, A.C. a través del Departamento de Instrumentación, ofrece el. Diplomado 2014
 El Centro de Investigación Científica de Yucatán, A.C. a través del Departamento de Instrumentación, ofrece el Diplomado 2014 en Aplicaciones para la Adquisición, Transferencia y Procesamiento de Datos
El Centro de Investigación Científica de Yucatán, A.C. a través del Departamento de Instrumentación, ofrece el Diplomado 2014 en Aplicaciones para la Adquisición, Transferencia y Procesamiento de Datos
Cursos de la Especialidad de Electrónica
 Cursos de la Especialidad de Electrónica PRIMER AÑO Física El curso comprende los siguientes temas: electricidad, electromagnetismo, análisis de circuitos eléctricos, medidas eléctricas, física no eléctrica.
Cursos de la Especialidad de Electrónica PRIMER AÑO Física El curso comprende los siguientes temas: electricidad, electromagnetismo, análisis de circuitos eléctricos, medidas eléctricas, física no eléctrica.