Lazo de control por realimentación (retroalimentación o feedback)
|
|
|
- Monica María Luz Cordero Toro
- hace 7 años
- Vistas:
Transcripción



1
2
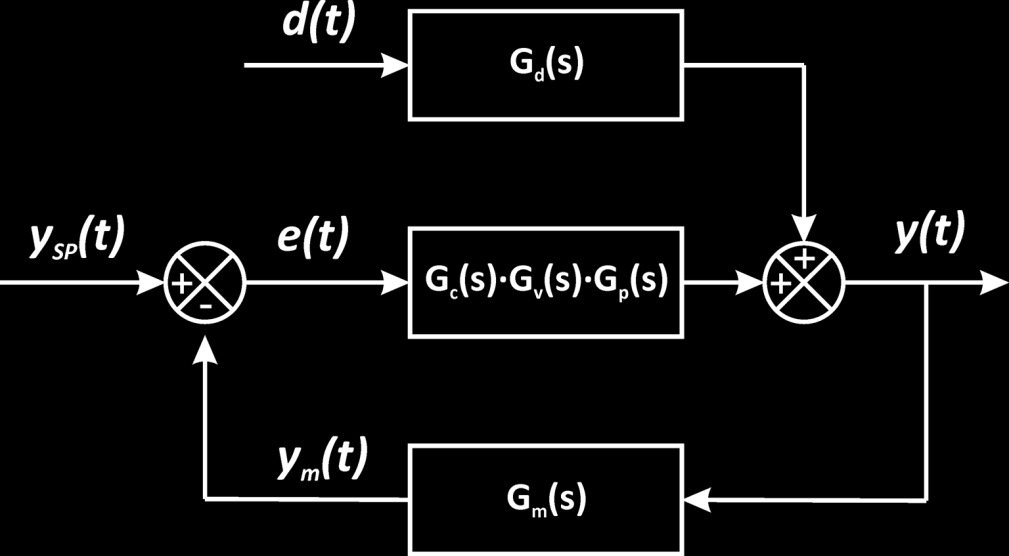
3 Lazo de control por realimentación (retroalimentación o feedback) Objetivo Minimizar el error (diferencia entre la consigna y la variable controlada) para que su valor sea lo más próximo a cero. Estructura del lazo / Elementos Operación: Bucle de realimentación de la información de la salida hacia la entrada denominación 1- El proceso, afectado por la variable manipulada (f) y la perturbación (d), responde proporcionando un determinado valor para la variable controlada (y). 2 El elemento de medida, interaccionando con el proceso extrae el valor de la variable controlada y la transmite hacia el controlador. 3 Se compara el valor deseado (punto de consigna, y SP ) con el medido (valor actual, y m ) para la variable controlada para calcular el error (e, SP-PV), a partir del que se calcula la salid de control (m). 4 La salida de control se alimenta al actuador que modifica la variable manipulada.
 Punto de consigna La variable (set point controlada Valor está deseado permanentemente para la variable bajo controlada) supervisión, su")
4 Lazo de control por realimentación (retroalimentación o feedback) Objetivo Minimizar el error (diferencia entre la consigna y la variable controlada) para que su valor sea lo más próximo a cero. Estructura del lazo Variables que intervienen yventaja: sp (t) Punto de consigna La variable (set point controlada Valor está deseado permanentemente para la variable bajo controlada) supervisión, su y(t) valor se Valor monitoriza de la variable constantemente. controlada No es preciso conocer la perturbación del yproceso m (t) Valor : VERSATILIDAD. de la variable controlada (medida) e(t) Inconveniente: Error, calculado Detección como la de diferencia la desviación entre tras la consigna propagación. y la variable Es necesario controlada que la m(t) perturbación Salida afecte de control al proceso (intensidad, y exista presión,.) una desviación (error) para iniciar la actuación. f(t) Valor de la variable manipulada d(t) Variable de perturbación
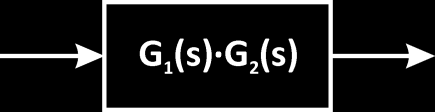
5 Lazo de control por realimentación (retroalimentación o feedback) Objetivo Minimizar el error (diferencia entre la consigna y la variable controlada) para que su valor sea lo más próximo a cero. Estructura del lazo Características: Estructura de Entrada-Salida: Los bloques que representan cada elemento del lazo se definen aprovechando la estructura entrada salida, lo que permite implementar las funciones de transferencia de los mismos. G c (s) G v (s) G p (t) G m (t) Función de transferencia del controlador Función de transferencia del elemento final de control Función de transferencia del proceso (habitualmente lineal: 1º o 2º orden) Función de transferencia del sensor o elemento de medida

6 Lazo de control por realimentación (retroalimentación o feedback) Estructura del lazo Sistema de control Arquitectura: Estructura de Entrada-Salida: Los bloques que representan cada elemento del lazo se definen aprovechando la estructura entrada salida, lo que permite implementar las funciones de transferencia de los mismos. G c (s) G v (s) G p (t) G m (t) Función de transferencia del controlador Función de transferencia del elemento final de control Función de transferencia del proceso (habitualmente lineal: 1º o 2º orden) Función de transferencia del sensor o elemento de medida



7 Lazo de control por realimentación (retroalimentación o feedback) Álgebra de bloques Serie Paralelo Realimentación


8 Lazo de control por realimentación (retroalimentación o feedback) Dinámica de la perturbación sobre la variable controlada y y s s ys Gc Gv Gp G c G v G p 1 G c G v G p Dinámica del punto de consigna sobre la variable controlada ds ysp Gd G d 1 G c G v G p s s ds ysp Función de transferencia consigna sobre salida Función de transferencia perturbación sobre salida Cálculo de la Variable Controlada en función del punto de consigna y de la variable de perturbación.

9 Lazo de control por realimentación (retroalimentación o feedback) Funciones de transferencia del lazo de control por realimentación? Sistema de control y Instantáneo t G Kp x s Kp t G y Tiempo muerto t Kp xt θ s Kp expθ s Primer Orden t dy τ dt G s y t Kp x Kp 1 τ s La Función de Transferencia del Bloque de Control depende de la ECUACIÓN o ALGORITMO DE CONTROL t 2 τ 2 d y dt 2 t G s Segundo Orden t dy 2δτ dt Kp 1 2δ τ s y 2 τ t Kp x s 2 t
10
.")
11 Ecuación o Algoritmo de Control Cálculo de la salida de control (acción a ejecutar sobre el elemento final de contol) a partir del cálculo del error (diferencia entre punto de consigna y valor de la variable a controlar). m(t) f e t Algoritmos de control más extendidos: - Control Todo/Nada - Control Proporcional - Control Proporcional-Integral - Control Proporcional-Integral-Derivativo
 Definición:")
 si si")

12 CONTROL Todo/Nada (On/Off Abierto/Cerrado) Definición: Control de dos posiciones Algoritmo de Control m(t) si si PV PV SP SP 0% 100% ó 100% 0% Acción de control inversa Acción de control directa
13 CONTROL Todo/Nada (On/Off Abierto/Cerrado) Definición: Control de dos posiciones Algoritmo de Control m(t) si si PV PV SP SP 0% 100% ó 100% 0% Acción de control inversa Acción de control directa Características básicas: 1- Sistema de control muy barato. El elemento final de control solamente ocupa dos posiciones. Interruptores o conmutadores. Ejemplo: Termostatos 2- Aplicables a sistemas de control con grandes capacitancias o resistencias donde el control fino no sea un requisito imprescindible. Ejemplo: Control de temperatura ambiente 3- Elevado degaste del elemento final de control. Continua actuación entorno al punto de consigna


14 CONTROL Todo/Nada (On/Off Abierto/Cerrado) El elemento final de control conmuta con muy elevada frecuencia elevado desgaste en piezas mecánicas. Necesidad de limitar la frecuencia de conmutación. Uso de banda muerta o Histéresis. Control entorno al punto de consigna. La acción no cambia hasta no rebasar el extremo más alejado de la banda muerta. Disminuye la frcuencia de conmutación.


15 CONTROL Todo/Nada (On/Off Abierto/Cerrado) Histéresis pequeña La extensión de la histéresis afecta a la frecuencia de la conmutación y a la fineza del ajuste. Histéresis grande Mayor histéresis implica menor frecuencia de conmutación, pero también menor fineza en el control.

16 CONTROL PROPORCIONAL Definición: La salida de control es proporcional al error en todo momento. Algoritmo de Control Parámetros: m m m Kc t ymt m et ysp Señal de Bias o de reset. Salida de control cuando el error es nulo. Normalmente suele corresponder a la señal que debe proporcionarse al elemento final de control para que este proporcione un valor de la variable manipulada igual al establecido por el diseño en régimen estacionario de la operación. Kc Lazo de control de caudal volumétrico: Si el error es cero (SP=PV), la salida de control (OP) no puede ser nula, puesto que el caudal sería nulo.


17 CONTROL PROPORCIONAL Definición: La salida de control es proporcional al error en todo momento. Algoritmo de Control Parámetros: Kc m m Kc t ymt m et ysp Ganancia del controlador. Constante de proporcionalidad entre el error y la salida de control. Su signo condiciona el tipo de acción (directa/inversa) Kc Acción de control inversa Acción de control directa

18 CONTROL PROPORCIONAL Definición: La salida de control es proporcional al error en todo momento. Algoritmo de Control Parámetros: m m Kc Kc Ganancia del controlador. La Intensidad de la acción depende del valor de Kc. Cuanto mayor Kc: Mayor velocidad del controlador Para un mismo error, la salida de control es más intensa. t ymt m et ysp Kc BP 100 K c BP Banda Proporcional. Es otra forma de expresar la ganancia del controlador. Corresponde al error necesario para producir una salida de control del 100%.

 m m K c e t Mayor ganancia")


19 CONTROL PROPORCIONAL Error en estado estacionario La acción proporcional carece de términos dinámicos (modelo instantáneo) m m K c e t Mayor ganancia del controlador, menor error en estado estacionario, pero también mayor inestabilidad. Solución: Considerar el error acumulado en el tiempo: Acción Integral Gc s Kc
20 CONTROL INTEGRAL Definición: La salida de control es proporcional a la integral del error. Algoritmo de Control Parámetros: ti K m m c τ i t 0 y sp K c t y m t dt m et Tiempo integral. Tiempo que se precisa para que la salida de control sufra un cambio igual al la magnitud del error producido τ i t 0 dt Acción de control inversa Acción de control directa Normalmente no se usa por sí misma (aunque funcionaría), sino en conjunción con la acción proporcional

 Solución: Considerar la trayectoria del error en el")
21 CONTROL PROPORCIONAL-INTEGRAL Definición: La salida de control es proporcional al error más la suma del error Algoritmo de Control m m Kc ysp t 1 1 t ym t t ym t dt m et et τi 0 ysp Kc τi t 0 ti elevado dt ti moderado ti bajo La acción integral se superpone a la acción proporcional eliminando el error en estado estacionario. La acción Integral introduce cierta inestabilidad (oscilaciones) Solución: Considerar la trayectoria del error en el tiempo: Acción derivativa Gc s Kc 1 1 τ i s
22 CONTROL DERIVATIVO Definición: La salida de control es proporcional a la variación del error en cada instante. Algoritmo de Control y sp t y m t d et d m( t) m Kcτd m( t) m Kcτd dt Tiene carácter anticipativo (no predictivo) pues lo que evalua es la trayectoria del error (su velocidad de crecimiento o disminución) y por tanto la salida del control e proporcional a esa velocidad de crecimiento La acción de control derivativa no puede usarse por sí sola, siempre en combinación con la acción de control proporcional (PD) o proporcional + integral (PID). La acción derivativa se utiliza en conjunción con la proporcional (Controladores PD) en procesos con grandes retardos (inercia) como el control de temperatura. No es adecuada para el control de variables de respuesta rápida (caudal, presión) y señales con ruido (oscilaciones de elevada frecuencia la derivada es tanto más intensa) pues provoca la desestabilización del lazo. dt
23 CONTROL PROPORCIONAL-INTEGRAL-DERIVATIVO Definición: La salida de control es proporcional al error, su acumulación en el tiempo y a la variación que éste experimenta en cada instante. Algoritmo de Control m( t ) m K c y sp τ i m( t ) m K c e 1 t y m t t y m t t t 0 y sp 1 τi t 0 e t d e dt τ d dt t d ysp dt τ d t dt ym t Los controladores PID son capaces de hacer frente a perturbaciones de carga y de punto de consigna. Son indicados para procesos donde no sea tolerable el error en el estado estacionario y se precise estabilidad en la regulación. El algoritmo de control PID es el más empleado, si bien existen variantes con bandas muertas (variables rápidas o con mucho ruido) o no lineales (la ganancia varía con el error).

24 CONTROL PROPORCIONAL-INTEGRAL-DERIVATIVO Parámetros: t d Tiempo derivativo. Tiempo necesario para que el efecto de acción de control proporcional avance hasta igualar a la diferencial (si la velocidad de crecimiento del error es constante). Controlador PD Controlador PID
 del error, lo que")
.")
25 CONTROL PROPORCIONAL-INTEGRAL-DERIVATIVO La acción derivativa se anticipa al crecimiento (en términos absolutos) del error, lo que dota de estabilidad al sistema reduciendo la oscilación (acción diferencial). m(t) m Kce t 1 τi t 0 e t dt τd d e dt t Gc s Kc 1 1 τ i s τd s
 valores?")
26 RESUMEN Proporcional Proporcional Integral Proporcional Integral Derivativo Modelo Dinámico t m( t ) m K c e m(t) m Kce m(t) m Kce t t 1 τi 1 τi t e 0 t 0 e t t dt d e dt τd dt t Parámetro Velocidad Estabilidad Ganancia (Kc) valores? Aumenta Disminuye Tiempo Integral (t i ) Disminuye Aumenta Tiempo Derivativo (t d ) Aumenta --- Función de Transferencia Gc Gc Gc s s s Kc Kc 1 Kc 1 1 τ i s 1 τ i s τd s SINTONIZACIÓN DE CONTROLADORES PID
27
28 La Sintonización de controladores PID consiste en la determinación de los valores de los parámetros característicos del algoritmo de control PID. Los valores óptimos dependen del proceso al que el controlador esté acoplado. Sistema de control ym s G c G v G p 1 G c G v G p G d 1 G c G v G p s ds ysp Función de transferencia consigna sobre salida Función de transferencia perturbación sobre salida
29 MÉTODO DE TANTEOS La acción proporcional es aquella principal en el control PID, por lo que, en tanteos, se inicia la búsqueda a partir de controladores proporcionales, con acciones integrales y derivativas en el mínimo. La ganancia proporcional se va elevando progresivamente de acuerdo a una progresión aritmética de 2. El valor óptimo es el que proporciona un ratio de decaimiento (ratio de sobrepasaje entre primera y segunda oscilación) de 0,25. MÉTODO DE TANTEOS (II) No se trata de un método de ajuste como tal, sino de partir de unos valores preestablecidos, dependiendo el tipo de proceso y variable a la que se aplica el lazo de control por realimentación. Desde ese punto, los parámetros se ajustan manualmente para lograr un mejor resultado. VARIABLE CONTROLADA CAUDAL NIVEL PRES. (Vap) PRES. (Liq) TEMP. Ganancia (Kc) 0,40-0, ,5-2, Tiempo Integral (t i ) 0,1 (6 ) Tiempo Derivativo (t d )
30 MÉTODO DE ZIEGLER-NICHOLS (Lazo abierto) Método desarrollado por Ziegler y Nichols en 1942 (doc. de información adicional). Está basado en la curva de acción y reacción. La curva se obtiene introduciendo una perturbación en la variable de entrada al proceso (salida de control) en forma de escalón y se monitoriza la salida o respuesta del sistema (variable controlada). El método se basa en ajustar la dinámica del proceso a un modelo de primer orden de retardo con tiempo muerto. Tipo de controlador Ganancia T. Integral T. Derivativo Proporcional b/θ 0 Proporcional-Integral 0,9 b/θ θ/0,3 0 Proporcional-Integral-derivativo 1,2 OP/(b θ) 2 θ 0,5 θ

31 MÉTODO DE ZIEGLER-NICHOLS (Lazo cerrado) Método desarrollado por Ziegler y Nichols en 1942 (doc. de información adicional). Está basado en la búsqueda del límite de estabilidad del lazo. El ensayo consiste en operar con el controlador en lazo cerrado con un algoritmo proporcional, ir elevando la ganancia progresivamente e introducir perturbaciones en escalón en el punto de consigna, hasta conseguir una respuesta oscilante sostenida de amplitud constante. En ese momento la ganancia se denomina crítica. Tipo de controlador Ganancia T. Integral T. Derivativo Proporcional 0,50 K cr 0 Proporcional-Integral 0,45 K cr 1/(1,2 T cr ) 0 Proporcional-Integral-derivativo 0,60 K cr 0,5 T cr 0,125 T cr
32 La estructura del lazo de realimentación está basado en alimentar información de entrada a una secuencia de comparación orden de control actuación obteniendo dicha información de la salida (respuesta del proceso). El controlador por realimentación puede ser implementado sobre cualquier tipo de proceso, puesto que su funcionamiento es independiente de la perturbación y de la dinámica que siga la variable controlada respecto de ésta. El algoritmo de control es la ecuación que permite obtener la orden o salida de control en función del error que se produce en cada instante. Existen distintas formas básicas de algoritmo de control: Todo-nada y las resultantes de la combinación de la acción proporcional, integral y derivativa. El ajuste de los parámetros básicos del controlador (Kc, ti, y td) dependen de la naturaleza del proceso y sus características principales. Su ajuste es imprescindible para que el lazo de control se acople correctamente al proceso.
Control PID. Ing. Esp. John Jairo Piñeros C.
 Control PID Ing. Esp. John Jairo Piñeros C. Control PID Ing. Esp. John Jairo Piñeros C. Que es PID? Variable Proporcional Variable Integral Variable Derivativa cuando se puede usar un controlador PI, PID?
Control PID Ing. Esp. John Jairo Piñeros C. Control PID Ing. Esp. John Jairo Piñeros C. Que es PID? Variable Proporcional Variable Integral Variable Derivativa cuando se puede usar un controlador PI, PID?
CONTROLADORES O REGULADORES PID. Prof. Gerardo Torres Sistemas de Control
 1 CONTROLADORES O REGULADORES PID INTRODUCCIÓN PID son los más utilizados en la industria. Son aplicados en general a la mayoría de los procesos. Pueden ser analógicos o digitales. Pueden ser electrónicos
1 CONTROLADORES O REGULADORES PID INTRODUCCIÓN PID son los más utilizados en la industria. Son aplicados en general a la mayoría de los procesos. Pueden ser analógicos o digitales. Pueden ser electrónicos
Sintonización de Controladores
 Sistemas de Control Automáticos Sintonización de Controladores Acciones de control Las acciones de los controladores las podemos clasificar como: Control discontínuo Control ON OFF Control contínuo Controles
Sistemas de Control Automáticos Sintonización de Controladores Acciones de control Las acciones de los controladores las podemos clasificar como: Control discontínuo Control ON OFF Control contínuo Controles
TRABAJO PRÁCTICO Nº 4 Análisis temporal de sistemas en lazo Cerrado
 TRABAJO PRÁCTICO Nº 4 Análisis temporal de sistemas en lazo Cerrado OBJETIVOS: Analizar las características del comportamiento transitorio de sistemas en lazo cerrado con controladores. Manejar el concepto
TRABAJO PRÁCTICO Nº 4 Análisis temporal de sistemas en lazo Cerrado OBJETIVOS: Analizar las características del comportamiento transitorio de sistemas en lazo cerrado con controladores. Manejar el concepto
MODOS O ACCIONES DEL CONTROLADOR
 MODOS O ACCIONES DEL CONTROLADOR El modo o acción del controlador es la relación que existe entre el error e(t) que es la señal de entrada y la orden al actuador u(t), señal de salida. O sea es como responde
MODOS O ACCIONES DEL CONTROLADOR El modo o acción del controlador es la relación que existe entre el error e(t) que es la señal de entrada y la orden al actuador u(t), señal de salida. O sea es como responde
INSTITUTO TECNOLOGICO DE MERIDA
 INSTITUTO TECNOLOGICO DE MERIDA Equipo # Tema: Tipos De Controladores Integrantes: Perez Perez Cesar Interian Cauich Edwin Romero Bojorquez Roberto EL C E R E B R O DE T O D O S L O S S I S T E M A S
INSTITUTO TECNOLOGICO DE MERIDA Equipo # Tema: Tipos De Controladores Integrantes: Perez Perez Cesar Interian Cauich Edwin Romero Bojorquez Roberto EL C E R E B R O DE T O D O S L O S S I S T E M A S
IDENTIFICACIÓN DE PROCESOS Y CURVA DE REACCIÓN
 IDENTIFICACIÓN DE PROCESOS Y CURVA DE REACCIÓN IDENTIFICACIÓN DE PROCESOS Si la planta es tan complicada que no es fácil obtener su modelo matemático, tampoco es posible un método analítico para el diseño
IDENTIFICACIÓN DE PROCESOS Y CURVA DE REACCIÓN IDENTIFICACIÓN DE PROCESOS Si la planta es tan complicada que no es fácil obtener su modelo matemático, tampoco es posible un método analítico para el diseño
Salida = Valor deseado (referencia) Para todo el tiempo posible!!! jlc
 Para todo el tiempo posible!!! jlc") Control: Se debe lograr que unas variables de salida de un sistema se comporten de acuerdo a nuestro deseo. La fuerza del ego humana puesta al servicio de la ingeniería Salida = Valor deseado (referencia)
Control: Se debe lograr que unas variables de salida de un sistema se comporten de acuerdo a nuestro deseo. La fuerza del ego humana puesta al servicio de la ingeniería Salida = Valor deseado (referencia)
Glosario de Términos de Control
 Glosario de Términos de Control Unifiquemos términos a fin de utilizar un lenguaje común en este aspecto de la tecnología. Siempre teniendo en cuenta que nuestro objeto de estudio serán los sistemas de
Glosario de Términos de Control Unifiquemos términos a fin de utilizar un lenguaje común en este aspecto de la tecnología. Siempre teniendo en cuenta que nuestro objeto de estudio serán los sistemas de
Unidad Temática 9: Análisis y Diseño de Sistemas de Control a Lazo Cerrado
 Control Automático Ing. Eléctrica Página 1 de 17 Unidad Temática 9: Análisis y Diseño de Sistemas de Control a Lazo Cerrado Algoritmos de Control: Un algoritmo de control se encarga de monitorear el valor
Control Automático Ing. Eléctrica Página 1 de 17 Unidad Temática 9: Análisis y Diseño de Sistemas de Control a Lazo Cerrado Algoritmos de Control: Un algoritmo de control se encarga de monitorear el valor
Presentado por: Laura Katherine Gómez Mariño. Universidad Central
 Presentado por: Laura Katherine Gómez Mariño. Universidad Central IMPORTANCIA DEL TEMA ESCOGIDO: Es una herramienta usada en simulación, que es parte crucial en un sistema de control industrial. Un controlador
Presentado por: Laura Katherine Gómez Mariño. Universidad Central IMPORTANCIA DEL TEMA ESCOGIDO: Es una herramienta usada en simulación, que es parte crucial en un sistema de control industrial. Un controlador
Automatización de Procesos/Sistemas de Control Ing. Biomédica e Ing. Electrónica Capitulo V Controladores PID
 Automatización de Procesos/Sistemas de Control Ing. Biomédica e Ing. Electrónica Capitulo V Controladores PID D.U. Campos-Delgado Facultad de Ciencias UASLP Enero-Junio/2014 1 CONTENIDO Motivación Estructura
Automatización de Procesos/Sistemas de Control Ing. Biomédica e Ing. Electrónica Capitulo V Controladores PID D.U. Campos-Delgado Facultad de Ciencias UASLP Enero-Junio/2014 1 CONTENIDO Motivación Estructura
Unidad V Respuesta de los sistemas de control
 Unidad V Respuesta de los sistemas de control MC Nicolás Quiroz Hernández Un controlador automático compara el valor real de la salida de una planta con la entrada de referencia (el valor deseado), determina
Unidad V Respuesta de los sistemas de control MC Nicolás Quiroz Hernández Un controlador automático compara el valor real de la salida de una planta con la entrada de referencia (el valor deseado), determina
El comportamiento de un controlador PID corresponde a la superposición de estas tres acciones, expresado en el dominio del tiempo es:
 1.4.1 CONTROLADOR PID A continuación se hace una breve presentación del controlador PID clásico en el dominio continuo y a la vez que se mencionan los métodos de sintonización, de oscilaciones amortiguadas
1.4.1 CONTROLADOR PID A continuación se hace una breve presentación del controlador PID clásico en el dominio continuo y a la vez que se mencionan los métodos de sintonización, de oscilaciones amortiguadas
Control PID Sintonización Elizabeth Villota
 Control PID Sintonización Elizabeth Villota Control PID Control PID una de las formas más comunes de usar realimentación en los sistemas de ingeniería. Control PID se encuentra presente en dispositivos
Control PID Sintonización Elizabeth Villota Control PID Control PID una de las formas más comunes de usar realimentación en los sistemas de ingeniería. Control PID se encuentra presente en dispositivos
TEORÍA DE CONTROL CONTROLADOR PID
 TEORÍA DE CONTROL CONTROLADOR PID Historia del controlador PID. Nicolás Minorsky 1922 Nicolás Minorsky había analizado las propiedades de los controladores tipo PID en su publicación Estabilidad direccional
TEORÍA DE CONTROL CONTROLADOR PID Historia del controlador PID. Nicolás Minorsky 1922 Nicolás Minorsky había analizado las propiedades de los controladores tipo PID en su publicación Estabilidad direccional
Controladores Industriales CONTROLADORES INDUSTRIALES
 CONTROLADORES INDUSTRIALES Los controladores de carácter industrial pueden agruparse en dos categorías: Continuos o Discontinuos. Los primeros se caracterizan por producir cambios continuos en la salida
CONTROLADORES INDUSTRIALES Los controladores de carácter industrial pueden agruparse en dos categorías: Continuos o Discontinuos. Los primeros se caracterizan por producir cambios continuos en la salida
Figura 6.1 Diagrama de bloques de un sistema electrónico de control de procesos en bucle cerrado.
 Figura 6.1 Diagrama de bloques de un sistema electrónico de control de procesos en bucle cerrado. Figura 6.2 Representación gráfica del comportamiento de un controlador todo-nada básico. Figura 6.3 Representación
Figura 6.1 Diagrama de bloques de un sistema electrónico de control de procesos en bucle cerrado. Figura 6.2 Representación gráfica del comportamiento de un controlador todo-nada básico. Figura 6.3 Representación
Control PID. Sintonización e implementación
 Control PID. Sintonización e implementación Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM Julio 2012 1 Control PID Control PID una de las formas más
Control PID. Sintonización e implementación Elizabeth Villota Cerna Curso: Ingeniería de Control (MT221) Facultad de Ingeniería Mecánica UNI-FIM Julio 2012 1 Control PID Control PID una de las formas más
SINTONIZACIÓN DE CONTROLADORES INDUSTRIALES
 FACULTAD DE CIENCAS EXACTAS Y TECNOLOGIA DEPARTAMENTO DE INGENIERÍA MECÁNICA CÁTEDRA: SISTEMAS DE CONTROL (PLAN 2004) DOCENTE: Prof. Ing. Mec. Marcos A. Golato SINTONIZACIÓN DE CONTROLADORES INDUSTRIALES
FACULTAD DE CIENCAS EXACTAS Y TECNOLOGIA DEPARTAMENTO DE INGENIERÍA MECÁNICA CÁTEDRA: SISTEMAS DE CONTROL (PLAN 2004) DOCENTE: Prof. Ing. Mec. Marcos A. Golato SINTONIZACIÓN DE CONTROLADORES INDUSTRIALES
CAPÍTULO 5. Pruebas y Resultados
 CAPÍTULO 5 Pruebas y Resultados 5 Pruebas y Resultados Con este capítulo se concluye el proceso de automatización de la planta piloto de tipo industrial, se presentan las pruebas y resultados del sistema
CAPÍTULO 5 Pruebas y Resultados 5 Pruebas y Resultados Con este capítulo se concluye el proceso de automatización de la planta piloto de tipo industrial, se presentan las pruebas y resultados del sistema
ESTABILIDAD. El procedimiento en el criterio de estabilidad de Routh es el siguiente: 1) Escriba el polinomio en s en la forma siguiente:
 Escriba el polinomio en s en la forma siguiente:") ESTABILIDAD Un sistema dinámico es estable si para cualquier entrada comprendida entre un límite superior y otro inferior la salida también resulta acotada sin importar las condiciones iniciales del sistema.
ESTABILIDAD Un sistema dinámico es estable si para cualquier entrada comprendida entre un límite superior y otro inferior la salida también resulta acotada sin importar las condiciones iniciales del sistema.
CONTROL BÁSICO CONTROL de PROCESOS
 CONRO BÁSICO CONRO de PROCESOS EMA: - Diseño de reguladores PID Facultad de Ingeniería UNER Carrera: Bioingeniería Planes de estudio: 1993/008 Integral - Derivativo (PID Consideramos el lazo básico de
CONRO BÁSICO CONRO de PROCESOS EMA: - Diseño de reguladores PID Facultad de Ingeniería UNER Carrera: Bioingeniería Planes de estudio: 1993/008 Integral - Derivativo (PID Consideramos el lazo básico de
Determine la cantidad de polos en el semi plano izquierdo, fundamente. Determine el rango de valores de K para que el sistema sea estable.
 ESTABILIDAD 1 Un sistema con realimentación unitaria tiene la siguiente función de transferencia de la planta: ( s 1.)( s 0.5s ) Gp ( s) s.5s 1 a) Cuantos polos tiene en el semiplano derecho. b) Cuantos
ESTABILIDAD 1 Un sistema con realimentación unitaria tiene la siguiente función de transferencia de la planta: ( s 1.)( s 0.5s ) Gp ( s) s.5s 1 a) Cuantos polos tiene en el semiplano derecho. b) Cuantos
Ingeniería de Control I Tema 11. Reguladores PID
 Ingeniería de Control I Tema 11 Reguladores PID 1 Tema 11. Reguladores PID Introducción Especificaciones de funcionamiento Acciones básicas de control Ajuste empírico de reguladores. Métodos de Ziegler-
Ingeniería de Control I Tema 11 Reguladores PID 1 Tema 11. Reguladores PID Introducción Especificaciones de funcionamiento Acciones básicas de control Ajuste empírico de reguladores. Métodos de Ziegler-
Estructuras de control I
 Estructuras de control I Características de los sistemas reales Efectos del tiempo muerto Predictor de Smith Efecto de las perturbaciones Control en Cascada Control Feedforward Diseño de redes Feedforward.
Estructuras de control I Características de los sistemas reales Efectos del tiempo muerto Predictor de Smith Efecto de las perturbaciones Control en Cascada Control Feedforward Diseño de redes Feedforward.
ANÁLISIS Y DISEÑO DE SISTEMAS DE CONTROL PARA ROBOTS
 ANÁLISIS Y DISEÑO DE SISTEMAS DE CONTROL PARA ROBOTS 1. INTRODUCCIÓN. 2. SISTEMAS REALIMENTADOS EN RÉGIMEN PERMANENTE 2.1 Error de posición 2.2 Error de velocidad 2.3 Conclusiones y Aplicación al Diseño
ANÁLISIS Y DISEÑO DE SISTEMAS DE CONTROL PARA ROBOTS 1. INTRODUCCIÓN. 2. SISTEMAS REALIMENTADOS EN RÉGIMEN PERMANENTE 2.1 Error de posición 2.2 Error de velocidad 2.3 Conclusiones y Aplicación al Diseño
CONTROLES COMPLEJOS EN LAZO CERRADO CONTROL DE PROCESOS
 CONTROLES COMPLEJOS EN LAZO CERRADO CONTROL DE PROCESOS 2 CONTROL REALIMENTADO Ventajas Produce acción correctora en cuanto existe error La acción correctora es independiente de la fuente y tipo de la
CONTROLES COMPLEJOS EN LAZO CERRADO CONTROL DE PROCESOS 2 CONTROL REALIMENTADO Ventajas Produce acción correctora en cuanto existe error La acción correctora es independiente de la fuente y tipo de la
Unidad I Análisis de Sistemas Realimentados
 Prof. Gerardo Torres - gerardotorres@ula.ve - Cubículo 003 Departamento de Circuitos y Medidas de la Escuela de Ingeniería Eléctrica de la Universidad de Los Andes Unidad I Análisis de Sistemas Realimentados
Prof. Gerardo Torres - gerardotorres@ula.ve - Cubículo 003 Departamento de Circuitos y Medidas de la Escuela de Ingeniería Eléctrica de la Universidad de Los Andes Unidad I Análisis de Sistemas Realimentados
- ACCIONES DE CONTROL -
 CÁTEDRA: SISTEMAS DE CONTROL (PLAN 2004) DOCENTE: Prof. Ing. Mec. Marcos A. Golato - ACCIONES DE CONTROL - 1 ACCIÓN DE CONTROL - DEFINICIÓN: ES LA CARACTERÍSTICA, MODO O ALGORITMO, CON EL CUAL EL CONTROLADOR
CÁTEDRA: SISTEMAS DE CONTROL (PLAN 2004) DOCENTE: Prof. Ing. Mec. Marcos A. Golato - ACCIONES DE CONTROL - 1 ACCIÓN DE CONTROL - DEFINICIÓN: ES LA CARACTERÍSTICA, MODO O ALGORITMO, CON EL CUAL EL CONTROLADOR
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones. Robótica Industrial. Universidad de Granada
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Robótica Industrial Universidad de Granada Tema 5: Análisis y Diseño de Sistemas de Control para Robots S.0 S.1 Introducción Sistemas Realimentados
Dpt. Teoría de la Señal, Telemática y Comunicaciones Robótica Industrial Universidad de Granada Tema 5: Análisis y Diseño de Sistemas de Control para Robots S.0 S.1 Introducción Sistemas Realimentados
Sistemas de control de un horno
 Sistemas de control de un horno En la figura se muestra el diagrama P&I correspondiente a un horno de una compañía petroquímica. En esta unidad se calienta un líquido aprovechando el calor liberado en
Sistemas de control de un horno En la figura se muestra el diagrama P&I correspondiente a un horno de una compañía petroquímica. En esta unidad se calienta un líquido aprovechando el calor liberado en
SISTEMAS DE CONTROL. ! Controladores! Sistemas de control: antecedentes! Sistemas de control actuales! Arquitectura de control 1/41
 1/41 SISTEMAS DE CONTROL! Controladores! Sistemas de control: antecedentes! Sistemas de control actuales! Arquitectura de control Controladores 2/41 Bucle Feedback (retroalimentación) v1 TC v2 3/41 Indicar
1/41 SISTEMAS DE CONTROL! Controladores! Sistemas de control: antecedentes! Sistemas de control actuales! Arquitectura de control Controladores 2/41 Bucle Feedback (retroalimentación) v1 TC v2 3/41 Indicar
CONTROL ON - OFF (TODO O NADA)
") UNIVERSIDAD NACIONAL EXPERIMENTAL DEL TACHIRA DEPARTAMENTO DE INGENIERIA ELECTRONICA NUCLEO DE INSTRUMENTACION CONTROL Y SEÑALES LABORATORIO DE INSTRUMENTACION Y CONTROL CONTROL ON - OFF (TODO O NADA)
UNIVERSIDAD NACIONAL EXPERIMENTAL DEL TACHIRA DEPARTAMENTO DE INGENIERIA ELECTRONICA NUCLEO DE INSTRUMENTACION CONTROL Y SEÑALES LABORATORIO DE INSTRUMENTACION Y CONTROL CONTROL ON - OFF (TODO O NADA)
6- TIPOS DE CONTROL UTILIZADOS
 6- TIPOS DE CONTROL UTILIZADOS 6.1 Control manual Dado un proceso de cualquier tipo y una actuación sobre el mismo que provoque un efecto, se define como control manual o en lazo abierto a la forma de
6- TIPOS DE CONTROL UTILIZADOS 6.1 Control manual Dado un proceso de cualquier tipo y una actuación sobre el mismo que provoque un efecto, se define como control manual o en lazo abierto a la forma de
OBJETIVO DEL ACTUADOR. Regular el movimiento de un cuerpo que se debe trasladar controladamente de una posición a otra.
 OBJETIVO DEL ACTUADOR Regular el movimiento de un cuerpo que se debe trasladar controladamente de una posición a otra. El control del movimiento puede ser, según la aplicación: I.- Control de posición.
OBJETIVO DEL ACTUADOR Regular el movimiento de un cuerpo que se debe trasladar controladamente de una posición a otra. El control del movimiento puede ser, según la aplicación: I.- Control de posición.
TEMA N 7 ESTABILIDAD DE LOS SISTEMAS DE CONTROL POR REALIMENTACIÓN
 UNIVERSIDAD NACIONAL EXPERIMENTAL FRANCISCO DE MIRANDA COMPLEJO ACADÉMICO EL SABINO PROGRAMA DE INGENIERÍA QUÍMICA DPTO DE MECÁNICA Y TECNOLOGÍA DE LA PRODUCCIÓN DINÁMICA Y CONTROL DE PROCESOS TEMA N 7
UNIVERSIDAD NACIONAL EXPERIMENTAL FRANCISCO DE MIRANDA COMPLEJO ACADÉMICO EL SABINO PROGRAMA DE INGENIERÍA QUÍMICA DPTO DE MECÁNICA Y TECNOLOGÍA DE LA PRODUCCIÓN DINÁMICA Y CONTROL DE PROCESOS TEMA N 7
14. SINTONIZACION EN LINEA
 14. SINTONIZACION EN LINEA 14.1 INTRODUCCION Por sintonización de un controlador se entiende el ajuste de los parámetros del mismo (Ganancia, Tiempo Integral y Tiempo Derivativo) para enfrentar las características
14. SINTONIZACION EN LINEA 14.1 INTRODUCCION Por sintonización de un controlador se entiende el ajuste de los parámetros del mismo (Ganancia, Tiempo Integral y Tiempo Derivativo) para enfrentar las características
6. Control con grandes tiempos muertos
 Control de Procesos Industriales 6. Control con grandes tiempos muertos por Pascual Campoy Universidad Politécnica Madrid Control de procesos con grandes tiempos muertos y procesos con respuesta inversa
Control de Procesos Industriales 6. Control con grandes tiempos muertos por Pascual Campoy Universidad Politécnica Madrid Control de procesos con grandes tiempos muertos y procesos con respuesta inversa
Universidad de Oviedo. Realimentación. Tema 3. Sistemas Automáticos
 Realimentación Tema 3 1 Índice Ventajas Inconvenientes El regulador todo-nada El regulador PID Funciones de Sensibilidad 2 Lazo típico de realimentación Perturbaciones p i (t) Señal de Mando Referencia
Realimentación Tema 3 1 Índice Ventajas Inconvenientes El regulador todo-nada El regulador PID Funciones de Sensibilidad 2 Lazo típico de realimentación Perturbaciones p i (t) Señal de Mando Referencia
CAPÍTULO 3. Conceptos y esquemas de control
 CAPÍTULO 3 Conceptos y esquemas de control 3 Conceptos y esquemas de control En este capítulo se presentan los diferentes esquemas de control aplicados a la planta piloto. Para ello se describe primero
CAPÍTULO 3 Conceptos y esquemas de control 3 Conceptos y esquemas de control En este capítulo se presentan los diferentes esquemas de control aplicados a la planta piloto. Para ello se describe primero
SINTONIZACIÓN DE CONTROLADORES INDUSTRIALES
 CÁTEDRA: SISTEMAS DE CONTROL (PLAN 2004) DOCENTE: Prof. Ing. Mec. Marcos A. Golato SINTONIZACIÓN DE CONTROLADORES INDUSTRIALES 1 CRITERIOS DE ESTABILIDAD EN EL CONTROL La estabilidad del control es la
CÁTEDRA: SISTEMAS DE CONTROL (PLAN 2004) DOCENTE: Prof. Ing. Mec. Marcos A. Golato SINTONIZACIÓN DE CONTROLADORES INDUSTRIALES 1 CRITERIOS DE ESTABILIDAD EN EL CONTROL La estabilidad del control es la
CONTROL BASICO DE UN PROCESO ENERGETICO
 UNIVERSIDAD NACIONAL DEL SANTA ESCUELA DE INGENIERIA EN ENERGIA CONTROL AUTOMATICO CONTROL BASICO DE UN PROCESO ENERGETICO (SEMANA 12-17/12/2012) PROFESOR : ING. CESAR L. LOPEZ AGUILAR 1. DEFINICIONES
UNIVERSIDAD NACIONAL DEL SANTA ESCUELA DE INGENIERIA EN ENERGIA CONTROL AUTOMATICO CONTROL BASICO DE UN PROCESO ENERGETICO (SEMANA 12-17/12/2012) PROFESOR : ING. CESAR L. LOPEZ AGUILAR 1. DEFINICIONES
TRABAJO PRÁCTICO N 5 Respuesta en Frecuencia
 TRABAJO PRÁCTICO N 5 Respuesta en Frecuencia OBJETIVOS: Comprender el concepto de respuesta en frecuencia. Familiarizarse con la respuesta en frecuencia de elementos simples y su representación gráfica.
TRABAJO PRÁCTICO N 5 Respuesta en Frecuencia OBJETIVOS: Comprender el concepto de respuesta en frecuencia. Familiarizarse con la respuesta en frecuencia de elementos simples y su representación gráfica.
Control Avanzado de. Más allá del PID
 Control Avanzado de Procesos. Más allá del PID Roberto Sanchis Llopis. Universitat Jaume I INTRODUCCIÓN Sistema continuo p1 p2 u y Variables del sistema: Entrada de control: u= apertura de válvula Salida
Control Avanzado de Procesos. Más allá del PID Roberto Sanchis Llopis. Universitat Jaume I INTRODUCCIÓN Sistema continuo p1 p2 u y Variables del sistema: Entrada de control: u= apertura de válvula Salida
6. Control con grandes tiempos muertos
 Control de Procesos Industriales 6. Control con grandes tiempos muertos por Pascual Campoy Universidad Politécnica Madrid Control de procesos con grandes tiempos muertos y procesos con respuesta inversa
Control de Procesos Industriales 6. Control con grandes tiempos muertos por Pascual Campoy Universidad Politécnica Madrid Control de procesos con grandes tiempos muertos y procesos con respuesta inversa
Introducción a los Sistemas de Control
 Introducción a los Sistemas de Control Organización de la presentación - Introducción a la teoría de control y su utilidad - Ejemplo simple: modelado de un motor de continua que mueve una cinta transportadora.
Introducción a los Sistemas de Control Organización de la presentación - Introducción a la teoría de control y su utilidad - Ejemplo simple: modelado de un motor de continua que mueve una cinta transportadora.
FUNDAMENTOS Y MODELOS MATEMÁTICOS DE LOS SISTEMAS DE CONTROL UNIDAD 1
 FUNDAMENTOS Y MODELOS MATEMÁTICOS DE LOS SISTEMAS DE CONTROL UNIDAD 1 Contenido El concepto de realimentación. Establecimiento de las ecuaciones diferenciales que rigen a un sistema. Función de transferencia.
FUNDAMENTOS Y MODELOS MATEMÁTICOS DE LOS SISTEMAS DE CONTROL UNIDAD 1 Contenido El concepto de realimentación. Establecimiento de las ecuaciones diferenciales que rigen a un sistema. Función de transferencia.
Práctica 1. Ajuste y sintonización de controladores
 Sistemas de Control Automático Práctica 1. Ajuste y sintonización de controladores Jorge Pomares Baeza Grupo de Innovación Educativa en Automática 211 GITE IEA - 1 - Práctica 1. Ajuste y sintonización
Sistemas de Control Automático Práctica 1. Ajuste y sintonización de controladores Jorge Pomares Baeza Grupo de Innovación Educativa en Automática 211 GITE IEA - 1 - Práctica 1. Ajuste y sintonización
Control Automático. Regulador PID y ajuste del PID. Eduardo Interiano
 Control Automático Regulador PID y ajuste del PID Eduardo Interiano Contenido Regulador PID PID ideal PID real Ajuste empírico del PID (Ziegler-Nichol Ejemplos Ejercicios Referencias 2 El PID ideal El
Control Automático Regulador PID y ajuste del PID Eduardo Interiano Contenido Regulador PID PID ideal PID real Ajuste empírico del PID (Ziegler-Nichol Ejemplos Ejercicios Referencias 2 El PID ideal El
Control automático con herramientas interactivas
 1 El proyecto de fichas interactivas Objetivo del libro 2 Explicar de forma interactiva conceptos básicos de un curso de introducción al control automático y facilitar al recién llegado su aprendizaje
1 El proyecto de fichas interactivas Objetivo del libro 2 Explicar de forma interactiva conceptos básicos de un curso de introducción al control automático y facilitar al recién llegado su aprendizaje
CAPITULO 3 SINTONIZACIÓN DE CONTROLADORES
 CAPITULO 3 SINTONIZACIÓN DE CONTROLADORES 3. INTRODUCCIÓN El paso final para la implementación de un lazo de control consiste en ajustar los parámetros del controlador. Si el controlador puede ser ajustado
CAPITULO 3 SINTONIZACIÓN DE CONTROLADORES 3. INTRODUCCIÓN El paso final para la implementación de un lazo de control consiste en ajustar los parámetros del controlador. Si el controlador puede ser ajustado
CONTROLADORES CONTINUOS. Eduardo Máscolo - Agustín Rodríguez Introducción al Control industrial - Curso 2016
 CONTROLADORES CONTINUOS Eduardo Máscolo - Agustín Rodríguez Introducción al Control industrial - Curso 2016 CRITERIOS DE SINTONÍA DE PID: CÓMO SE QUE ESTÁ SINTONIZADO? Criterios elementales La planta no
CONTROLADORES CONTINUOS Eduardo Máscolo - Agustín Rodríguez Introducción al Control industrial - Curso 2016 CRITERIOS DE SINTONÍA DE PID: CÓMO SE QUE ESTÁ SINTONIZADO? Criterios elementales La planta no
Control. Controlar. variable controlada variable manipulada Control realimentado. Sistema. Sistemas de control realimentado.
 Clase 1 Definir: Control. Poder o dominio que una persona u objeto ejerce sobre alguien o algo (En ingeniería: Conjunto de mecanismos y dispositivos que regulan el funcionamiento de una máquina, un aparato
Clase 1 Definir: Control. Poder o dominio que una persona u objeto ejerce sobre alguien o algo (En ingeniería: Conjunto de mecanismos y dispositivos que regulan el funcionamiento de una máquina, un aparato
UNIDAD 1: INTRODUCCIÓN A LOS SISTEMAS DE CONTROL
 UNIDAD 1: INTRODUCCIÓN A LOS SISTEMAS DE CONTROL CONCEPTOS FUNDAMENTALES EN SISTEMAS DE CONTROL: La Ingeniería de Control surge por la necesidad del hombre de mejorar su estándar de vida y de que algunas
UNIDAD 1: INTRODUCCIÓN A LOS SISTEMAS DE CONTROL CONCEPTOS FUNDAMENTALES EN SISTEMAS DE CONTROL: La Ingeniería de Control surge por la necesidad del hombre de mejorar su estándar de vida y de que algunas
ANEXO 2. Realizado: Versión: Páginas: Grupo SUPPRESS Laboratorio Remoto de Automática (LRA-ULE) Universidad de León
 Universidad de León") ANEXO 2 Realizado: Grupo SUPPRESS (Supervisión, Control y Automatización) Laboratorio Remoto de Automática (LRA-ULE) Universidad de León http://lra.unileon.es Versión: Páginas: 1.0 6 1. El Controlador
ANEXO 2 Realizado: Grupo SUPPRESS (Supervisión, Control y Automatización) Laboratorio Remoto de Automática (LRA-ULE) Universidad de León http://lra.unileon.es Versión: Páginas: 1.0 6 1. El Controlador
Sistemas de Control apuntes capítulo IV (controladores industriales)
") Sistemas de Control apuntes capítulo IV (controladores industriales) Facultad de Ingeniería UNCPBA Dto. de Ingeniería Electromecánica Prof: Dr. Gerardo Acosta Tema: Acciones Básicas de Control 1 Controladores
Sistemas de Control apuntes capítulo IV (controladores industriales) Facultad de Ingeniería UNCPBA Dto. de Ingeniería Electromecánica Prof: Dr. Gerardo Acosta Tema: Acciones Básicas de Control 1 Controladores
Tema 5 Acciones básicas de control. Controlador PID.
 Tema 5 Acciones básicas de control. Controlador PID. 1. Control en el dominio del tiempo. PID 2. Estudio del Lugar de las raíces 3. Control en el dominio de la frecuencia. Compensadores Control en el dominio
Tema 5 Acciones básicas de control. Controlador PID. 1. Control en el dominio del tiempo. PID 2. Estudio del Lugar de las raíces 3. Control en el dominio de la frecuencia. Compensadores Control en el dominio
Instrumentación y Control de Procesos PLANIFICACIONES Actualización: 1ºC/2018. Planificaciones Instrumentación y Control de Procesos
 Planificaciones 8621 - Instrumentación y Control de Procesos Docente responsable: COMASTRI HECTOR ADOLFO 1 de 5 OBJETIVOS -Lograr que el alumno adquiera: * un panorama de los problemas asociados al Control
Planificaciones 8621 - Instrumentación y Control de Procesos Docente responsable: COMASTRI HECTOR ADOLFO 1 de 5 OBJETIVOS -Lograr que el alumno adquiera: * un panorama de los problemas asociados al Control
Control PID de Temperatura
 Control PID de Temperatura Esquema basico de control PID Reglas Euristicas de ajuste Reglas. Efecto Anti Windup Como la integral resulta de la sumatoria de los errores de cada ciclo, se corre el
Control PID de Temperatura Esquema basico de control PID Reglas Euristicas de ajuste Reglas. Efecto Anti Windup Como la integral resulta de la sumatoria de los errores de cada ciclo, se corre el
3. Controladores y acciones de control
 3. Controladores y acciones de control 3. Controladores industriales: En los sistemas de control, el controlador es el elemento encargado de comparar la señal de referencia con la señal de salida del proceso
3. Controladores y acciones de control 3. Controladores industriales: En los sistemas de control, el controlador es el elemento encargado de comparar la señal de referencia con la señal de salida del proceso
Capítulo 6: Diseño de controladores
 Capítulo 6: Diseño de controladores Capítulo 6: Diseño de controladores 6.1. Introducción El objetivo es el desarrollo de controladores para que la plataforma siga una trayectoria de referencia con independencia
Capítulo 6: Diseño de controladores Capítulo 6: Diseño de controladores 6.1. Introducción El objetivo es el desarrollo de controladores para que la plataforma siga una trayectoria de referencia con independencia
MINISTERIO DE EDUCACIÓN DIRECCIÓN DE EDUCACIÓN TÉCNICA Y PROFESIONAL. FAMILIA DE ESPECIALIDADES: INFORMÁTICA Y LAS COMUNICACIONES
 MINISTERIO DE EDUCACIÓN DIRECCIÓN DE EDUCACIÓN TÉCNICA Y PROFESIONAL. FAMILIA DE ESPECIALIDADES: INFORMÁTICA Y LAS COMUNICACIONES ESPECIALIDAD: AUTOMÁTICA PROGRAMA: Control de Procesos. AÑO: 3ro NIVEL:
MINISTERIO DE EDUCACIÓN DIRECCIÓN DE EDUCACIÓN TÉCNICA Y PROFESIONAL. FAMILIA DE ESPECIALIDADES: INFORMÁTICA Y LAS COMUNICACIONES ESPECIALIDAD: AUTOMÁTICA PROGRAMA: Control de Procesos. AÑO: 3ro NIVEL:
Sintonizaciónde controladores. Ing. Victor Aviña
 Sintonizaciónde controladores Ing. Victor Aviña Método de sintonización en lazo cerrado Criterio de Ziegler-Nichols(método de la ganancia máxima) Primero se incrementa la ganancia del control proporcional
Sintonizaciónde controladores Ing. Victor Aviña Método de sintonización en lazo cerrado Criterio de Ziegler-Nichols(método de la ganancia máxima) Primero se incrementa la ganancia del control proporcional
INSTITUTO POLITÉCNICO NACIONAL Escuela Superior de Ingeniería Mecánica y Eléctrica
 INSTITUTO POLITÉCNICO NACIONAL Escuela Superior de Ingeniería Mecánica y Eléctrica Ingeniería en Control y Automatización TEORÍA DE CONTROL 1: GUÍA PARA EL EXAMEN EXTRAORDINARIO (TEORÍA) Nombre: Grupo
INSTITUTO POLITÉCNICO NACIONAL Escuela Superior de Ingeniería Mecánica y Eléctrica Ingeniería en Control y Automatización TEORÍA DE CONTROL 1: GUÍA PARA EL EXAMEN EXTRAORDINARIO (TEORÍA) Nombre: Grupo
Tecnicas de diseño y compensación
 Capítulo 8 Tecnicas de diseño y compensación El objetivo primordial de esta sección es presentar algunos procedimientos para el diseño y compensación de sistemas de control lineales, invariantes en el
Capítulo 8 Tecnicas de diseño y compensación El objetivo primordial de esta sección es presentar algunos procedimientos para el diseño y compensación de sistemas de control lineales, invariantes en el
AUTOMATIZACION Y CONTROL DE PROCESOS FACEyT UNT ESTABILIDAD DE LOS SISTEMAS EN LAZO CERRADO
 Análisis Cualitativo de la Respuesta Temporal de un Sistema Si se conocen la función de transferencia G(s) de un dado sistema y la entrada x(t), se puede evaluar la salida y(t) a partir de: y(s) G (s )
Análisis Cualitativo de la Respuesta Temporal de un Sistema Si se conocen la función de transferencia G(s) de un dado sistema y la entrada x(t), se puede evaluar la salida y(t) a partir de: y(s) G (s )
CONCEPTOS. Concepto de Sistema. Arreglo de elementos conectados o relacionados entre sí de tal manera que forman y/o actúen como una unidad entera.
 CONCEPTOS Concepto de Sistema. Arreglo de elementos conectados o relacionados entre sí de tal manera que forman y/o actúen como una unidad entera. Concepto de Sistema de Control. Interacción de componentes
CONCEPTOS Concepto de Sistema. Arreglo de elementos conectados o relacionados entre sí de tal manera que forman y/o actúen como una unidad entera. Concepto de Sistema de Control. Interacción de componentes
ANEXO 1: SINTONIZACION A TRAVÉS DEL METODO DE ZIEGLER-NICHOLS
 ANEXO 1: SINTONIZACION A TRAVÉS DEL METODO DE ZIEGLER-NICHOLS Luego de realizar las pruebas necesarias con el modelo de planta obtenido y no lograr los resultados esperados, se diseñará el controlador
ANEXO 1: SINTONIZACION A TRAVÉS DEL METODO DE ZIEGLER-NICHOLS Luego de realizar las pruebas necesarias con el modelo de planta obtenido y no lograr los resultados esperados, se diseñará el controlador
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITÉCNICA DE LA FUERZA ARMADA BOLIVARIANA SISTEMAS DE CONTROL DE LAZO ABIERTO Y SISTEMA DE CONTROL LAZO CERRADO
 UNIVERSIDAD NACIONAL EXPERIMENTAL POLITÉCNICA DE LA FUERZA ARMADA BOLIVARIANA SISTEMAS DE CONTROL DE LAZO ABIERTO Y SISTEMA DE CONTROL LAZO CERRADO Prof. Gloria M. Botina B Contenido Sistema Clasificación
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITÉCNICA DE LA FUERZA ARMADA BOLIVARIANA SISTEMAS DE CONTROL DE LAZO ABIERTO Y SISTEMA DE CONTROL LAZO CERRADO Prof. Gloria M. Botina B Contenido Sistema Clasificación
SISTEMAS DE CONTROL AUTOMÁTICO DEFINICIÓN_TIPOS_PARTES DIAGRAMA DE BLOQUES ESTABILIDAD
 SISTEMAS DE CONTROL AUTOMÁTICO DEFINICIÓN_TIPOS_PARTES DIAGRAMA DE BLOQUES ESTABILIDAD DEFINICIÓN Un Sistema de Control es un conjunto de elementos o componentes relacionados entre si que controlan alguna
SISTEMAS DE CONTROL AUTOMÁTICO DEFINICIÓN_TIPOS_PARTES DIAGRAMA DE BLOQUES ESTABILIDAD DEFINICIÓN Un Sistema de Control es un conjunto de elementos o componentes relacionados entre si que controlan alguna
DEFINICIONES Y CONCEPTOS (SISTEMAS DE PERCEPCIÓN - DTE) Curso
 Curso") DEFINICIONES Y CONCEPTOS (SISTEMAS DE PERCEPCIÓN - DTE) Curso 2009-10 1. Generalidades Instrumentación: En general la instrumentación comprende todas las técnicas, equipos y metodología relacionados con
DEFINICIONES Y CONCEPTOS (SISTEMAS DE PERCEPCIÓN - DTE) Curso 2009-10 1. Generalidades Instrumentación: En general la instrumentación comprende todas las técnicas, equipos y metodología relacionados con
Introducción a los Sistemas de Control
 Introducción a los Sistemas de Control Ingeniería de Sistemas I Índice TEMA Introducción a los Sistemas de Control 1. Introducción 2. Revisión histórica 3. Definiciones 3.1 Descripción de los sistemas
Introducción a los Sistemas de Control Ingeniería de Sistemas I Índice TEMA Introducción a los Sistemas de Control 1. Introducción 2. Revisión histórica 3. Definiciones 3.1 Descripción de los sistemas
Controladores PID. Ricardo-Franco Mendoza-Garcia Escuela Universitaria de Ingeniería Mecánica Universidad de Tarapacá Arica, Chile
 Controladores PID Ricardo-Franco Mendoza-Garcia rmendozag@uta.cl Escuela Universitaria de Ingeniería Mecánica Universidad de Tarapacá Arica, Chile September 25, 2014 R. F. Mendoza-Garcia (Mecánica, UTA)
Controladores PID Ricardo-Franco Mendoza-Garcia rmendozag@uta.cl Escuela Universitaria de Ingeniería Mecánica Universidad de Tarapacá Arica, Chile September 25, 2014 R. F. Mendoza-Garcia (Mecánica, UTA)
Sistema de mezcla con quemador
 EUITI-UPM Dpto. Electrónica Automática e Informática Industrial. Título: Sistema de mezcla con quemador Trabajo de Control de Procesos: 1 1. Descripción del sistema La figura representa un sistema mezclador
EUITI-UPM Dpto. Electrónica Automática e Informática Industrial. Título: Sistema de mezcla con quemador Trabajo de Control de Procesos: 1 1. Descripción del sistema La figura representa un sistema mezclador
METODOS O FORMAS DE CONTROL
 UNIVERSIDAD NACIONAL DEL SANTA ESCUELA DE INGENIERIA EN ENERGIA CONTROL AUTOMATICO METODOS O FORMAS DE CONTROL (SEMANA 13-14 07-14/01/2013) PROFESOR : ING. CESAR L. LOPEZ AGUILAR 1. INTRODCCION CONTENIDO
UNIVERSIDAD NACIONAL DEL SANTA ESCUELA DE INGENIERIA EN ENERGIA CONTROL AUTOMATICO METODOS O FORMAS DE CONTROL (SEMANA 13-14 07-14/01/2013) PROFESOR : ING. CESAR L. LOPEZ AGUILAR 1. INTRODCCION CONTENIDO
Tema 6 Control de sistemas de orientación de antenas y de telescopios
 Tema 6 Control de sistemas de orientación de antenas y de telescopios. Métodos de control de sistemas de orientación 2. Métodos de ajuste de PIDs 3. Estudio de las perturbaciones 4. Técnicas y diseño de
Tema 6 Control de sistemas de orientación de antenas y de telescopios. Métodos de control de sistemas de orientación 2. Métodos de ajuste de PIDs 3. Estudio de las perturbaciones 4. Técnicas y diseño de
INSTRUMENTACION TEMARIO
 INSTRUMENTACION TEMARIO 1. Introducción a la toma de medidas en sistemas físicos 2. Sensores y Transductores 3. Acondicionamiento de la señal: amplificación, normalización y filtrado 4. Sistemas de adquisición
INSTRUMENTACION TEMARIO 1. Introducción a la toma de medidas en sistemas físicos 2. Sensores y Transductores 3. Acondicionamiento de la señal: amplificación, normalización y filtrado 4. Sistemas de adquisición
Control Automático Introducción
 Control Automático Introducción Contenido Qué es control automático? Tareas y objetivos del control automático Estructuras de los circuitos de regulación Tipos de regulación Efecto de las perturbaciones
Control Automático Introducción Contenido Qué es control automático? Tareas y objetivos del control automático Estructuras de los circuitos de regulación Tipos de regulación Efecto de las perturbaciones
Práctica 1. Introducción a los sistemas de control
 Práctica. Introducción a los sistemas de control Asignatura: Sistemas Electrónicos de Control Curso: 03/04- Realización: D4-005, 4/3/3 (g), /3/3 (g9), 8h-0h Nota: Para la realización de la práctica es
Práctica. Introducción a los sistemas de control Asignatura: Sistemas Electrónicos de Control Curso: 03/04- Realización: D4-005, 4/3/3 (g), /3/3 (g9), 8h-0h Nota: Para la realización de la práctica es
Lazos de control. Lazos de control. Ing. Leni Núñez
 Lazos de control Ing. Leni Núñez . Definición.. Elementos del lazo de control 3. Caracterización del proceso: Modelos dinámicos lineales.. Respuesta al impulso y función de transferencia.. Diagrama de
Lazos de control Ing. Leni Núñez . Definición.. Elementos del lazo de control 3. Caracterización del proceso: Modelos dinámicos lineales.. Respuesta al impulso y función de transferencia.. Diagrama de
AUTOMATIZACION Y CONTROL DE PROCESOS FACEyT UNT ESTABILIDAD DE LOS SISTEMAS EN LAZO CERRADO
 Análisis Cualitativo de la Respuesta Temporal de un Sistema Si se conocen la función de transferencia G(s) de un dado sistema y la entrada x(t), se puede evaluar la salida y(t) a partir de: y(s) G (s )
Análisis Cualitativo de la Respuesta Temporal de un Sistema Si se conocen la función de transferencia G(s) de un dado sistema y la entrada x(t), se puede evaluar la salida y(t) a partir de: y(s) G (s )
CONTROL DE PROCESOS EXAMEN FINAL Agosto de 2008
 TEMA 1 Una corriente líquida es calentada en un intercambiador con control automático de temperatura como se muestra en la figura. El flujo líquido en condiciones normales está entre 5 y 15 m 3 /h. Los
TEMA 1 Una corriente líquida es calentada en un intercambiador con control automático de temperatura como se muestra en la figura. El flujo líquido en condiciones normales está entre 5 y 15 m 3 /h. Los
Serie 10 ESTABILIDAD
 Serie 0 ESTABILIDAD Condición de estabilidad U u Gu U R r + + - Gc Gv Gp C G V G P + c C H G( G (. G (. G (. H ( C V P + G( 0 G( G φ 80 Localización de las raíces Plano s E S T A B L E I N E S T A B L
Serie 0 ESTABILIDAD Condición de estabilidad U u Gu U R r + + - Gc Gv Gp C G V G P + c C H G( G (. G (. G (. H ( C V P + G( 0 G( G φ 80 Localización de las raíces Plano s E S T A B L E I N E S T A B L
Capítulo 0: Estudio de los ciclos de la vida como sistemas de control automático naturales.
 Capítulo 0: Estudio de los ciclos de la vida como sistemas de control automático naturales. 1. Introducción Los sistemas naturales son controlados, o cíclicos, de manera que los subproductos de un paso
Capítulo 0: Estudio de los ciclos de la vida como sistemas de control automático naturales. 1. Introducción Los sistemas naturales son controlados, o cíclicos, de manera que los subproductos de un paso
Factory Automation. Regulación con programa de PLC
 Factory Automation Regulación con programa de PLC 1. Funciones PID + TPO PLCs: : Introducción PID con dos grados de libertad Cuando se previene el sobrepasamiento con un control PID simple se ralentiza
Factory Automation Regulación con programa de PLC 1. Funciones PID + TPO PLCs: : Introducción PID con dos grados de libertad Cuando se previene el sobrepasamiento con un control PID simple se ralentiza
Ejercicio 3 Un sistema de control de velocidad de un motor de corriente continua se modela mediante la ecuación
 Trabajo práctico Nº 4 Fundamentos de control realimentado - Segundo cuatrimestre 2017 Ejercicio 1 Aplicando el criterio de estabilidad de Routh: i) Determine la cantidad de raíces en el semiplano derecho
Trabajo práctico Nº 4 Fundamentos de control realimentado - Segundo cuatrimestre 2017 Ejercicio 1 Aplicando el criterio de estabilidad de Routh: i) Determine la cantidad de raíces en el semiplano derecho
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
 PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ FACULTAD DE CIENCIAS E INGENIERÍA DISEÑO DEL CONTROL DE TEMPERATURA DEL PORTASUSTRATO DE UNA CÁMARA DE ALTO VACÍO PARA ELABORAR PELÍCULAS SEMICONDUCTORAS DELGADAS
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ FACULTAD DE CIENCIAS E INGENIERÍA DISEÑO DEL CONTROL DE TEMPERATURA DEL PORTASUSTRATO DE UNA CÁMARA DE ALTO VACÍO PARA ELABORAR PELÍCULAS SEMICONDUCTORAS DELGADAS
Realizado: Versión: Páginas: Grupo SUPPRESS. Laboratorio Remoto de Automática (LRA-ULE) Universidad de León
 Universidad de León") Realizado: Grupo SUPPRESS (Supervisión, Control y Automatización) Laboratorio Remoto de Automática (LRA-ULE) Universidad de León http://lra.unileon.es Versión: Páginas: 1.0 10 0. INTRODUCCIÓN En este documento
Realizado: Grupo SUPPRESS (Supervisión, Control y Automatización) Laboratorio Remoto de Automática (LRA-ULE) Universidad de León http://lra.unileon.es Versión: Páginas: 1.0 10 0. INTRODUCCIÓN En este documento
PRACTICA: CONTROL PID. Sistemas de Control y Controladores
 Universidad Nacional Experimental del Táchira. Departamento de Ingeniería Electrónica. Núcleo de Instrumentación y Control. Redactor: Prof. Tito González. Revisor: San Cristóbal, Miércoles 05 de Noviembre
Universidad Nacional Experimental del Táchira. Departamento de Ingeniería Electrónica. Núcleo de Instrumentación y Control. Redactor: Prof. Tito González. Revisor: San Cristóbal, Miércoles 05 de Noviembre
TUXTLA GUTIERREZ, CHIAPAS, A 29 DE NOVIEMBRE DEL 2017
 SECRETARÍA DE EDUCACIÓN PÚBLICA DIRECCIÓN GENERAL DE EDUCACIÓN SUPERIOR TECNOLÓGICA TECNOLOGICO NACIONAL DE MEXICO INSTITUTO TECNOLÓGICO DE TUXTLA GUTIÉRREZ INGENIERIA MECANICA Materia: INSTRUMENTACION
SECRETARÍA DE EDUCACIÓN PÚBLICA DIRECCIÓN GENERAL DE EDUCACIÓN SUPERIOR TECNOLÓGICA TECNOLOGICO NACIONAL DE MEXICO INSTITUTO TECNOLÓGICO DE TUXTLA GUTIÉRREZ INGENIERIA MECANICA Materia: INSTRUMENTACION
CONTROLADOR PID. Jorge Luis Mírez Tarrillo. Ing Mecánio Electricista Maestro en Ciencias mención Física
 CONTROLADOR PID Jorge Luis Mírez Tarrillo Ing Mecánio Electricista Maestro en Ciencias mención Física Es una estructura de control que es casi universalmente utilizada en la industria. Se trata de la familia
CONTROLADOR PID Jorge Luis Mírez Tarrillo Ing Mecánio Electricista Maestro en Ciencias mención Física Es una estructura de control que es casi universalmente utilizada en la industria. Se trata de la familia
El modelo matemático tiende a ser lo más simple posible, con una representación. A la hora de desarrollar un modelo matemático:
 Modelo matemático de procesos 1. Modelo Matemático Un modelo matemático muy exacto implica un desarrollo matemático muy complejo. Por el contrario, un modelo matemático poco fino nos deparará un desarrollo
Modelo matemático de procesos 1. Modelo Matemático Un modelo matemático muy exacto implica un desarrollo matemático muy complejo. Por el contrario, un modelo matemático poco fino nos deparará un desarrollo
LABORATORIO VIRTUAL REMOTO
 LABORATORIO VIRTUAL REMOTO UNA HERRAMIENTA PARA LA ENSEÑANZA DE CONTROL AUTOMÁTICO Asesor: Jorge R. Vega Universidad Tecnológica Nacional - Facultad Regional Santa Fe AADECA 2012-03 al 05 de Octubre de
LABORATORIO VIRTUAL REMOTO UNA HERRAMIENTA PARA LA ENSEÑANZA DE CONTROL AUTOMÁTICO Asesor: Jorge R. Vega Universidad Tecnológica Nacional - Facultad Regional Santa Fe AADECA 2012-03 al 05 de Octubre de
PRINCIPIOS DE SERVOSISTEMAS
 PRINCIPIOS DE SERVOSISTEMAS Hoy en día los sistemas de control constituyen la base de todo proceso industrial y automatización en general, siendo su finalidad proporcionar una respuesta adecuada a un estímulo
PRINCIPIOS DE SERVOSISTEMAS Hoy en día los sistemas de control constituyen la base de todo proceso industrial y automatización en general, siendo su finalidad proporcionar una respuesta adecuada a un estímulo
CAPITULO 4 TÉCNICAS DE CONTROL AVANZADO
 CAPITULO 4 TÉCNICAS DE CONTROL AVANZADO 4.1 INTRODUCCIÓN En las secciones anteriores se han discutido los elementos de un lazo de control realimentado usando controladores P, PI, PD y PID. En los últimos
CAPITULO 4 TÉCNICAS DE CONTROL AVANZADO 4.1 INTRODUCCIÓN En las secciones anteriores se han discutido los elementos de un lazo de control realimentado usando controladores P, PI, PD y PID. En los últimos
PRACTICA: MODOS DE CONTROL. Sistemas de Control y Controladores
 Universidad Nacional Experimental del Táchira. Departamento de Ingeniería Electrónica. Laboratorio de Instrumentación y Control, Código 02 33 905L. Profesor: Tito González. San Cristóbal, Jueves 04 de
Universidad Nacional Experimental del Táchira. Departamento de Ingeniería Electrónica. Laboratorio de Instrumentación y Control, Código 02 33 905L. Profesor: Tito González. San Cristóbal, Jueves 04 de
Facultad de Ingeniería División de Ingeniería Eléctrica Departamento de Ingeniería de Control LABORATORIO DE CONTROL ANALÓGICO P R A C T I C A
 Facultad de Ingeniería División de Ingeniería Eléctrica Departamento de Ingeniería de Control LABORATORIO DE CONTROL ANALÓGICO P R A C T I C A C O N T R O L D E T E M P E R A T U R A Octubre 1998 CONTROL
Facultad de Ingeniería División de Ingeniería Eléctrica Departamento de Ingeniería de Control LABORATORIO DE CONTROL ANALÓGICO P R A C T I C A C O N T R O L D E T E M P E R A T U R A Octubre 1998 CONTROL