CLIMATIZACIÓN MEDIANTE CÉLULAS PELTIER
|
|
|
- César Vidal Salazar
- hace 6 años
- Vistas:
Transcripción
1 UNIVERSIDAD PONTIFICIA COMILLAS ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA (ICAI) INGENIERO INDUSTRIAL PROYECTO FIN DE CARRERA CLIMATIZACIÓN MEDIANTE CÉLULAS PELTIER AUTOR: ROCÍO HERRANZ PINDADO MADRID, Septiembre de 2008
2 ESTE PROYECTO CONTIENE LOS SIGUIENTES DOCUMENTOS DOCUMENTO Nº 1, MEMORIA 1.1 Memoria pág. 5 a páginas 1.2 Estudio Económico pág. 130 a páginas 1.3 Manual del Usuario pág. 132 a páginas 1.4 Código pág. 146 a páginas 1.5 Datasheets pág. 154 a páginas DOCUMENTO Nº 2, PLANOS 2.1 Lista de planos pág. 3 a 4 2 páginas 2.2 Planos pág. 5 a 10 6 páginas DOCUMENTO Nº 3, PLIEGO DE CONDICIONES 3.1 Generales y Económicas pág. 3 a 5 3 páginas 3.2 Técnicas y Particulares pág. 6 a 9 4 páginas DOCUMENTO Nº 4, PRESUPUESTO 4.1 Mediciones pág. 3 a 5 3 páginas 4.2 Precios Unitarios pág. 6 a 7 2 páginas 4.3 Sumas Parciales pág. 8 a 9 2 páginas 4.4 Presupuesto General pág. 10 a 10 1 páginas
3 Autorizada la entrega del proyecto de la alumna EL DIRECTOR DEL PROYECTO Ramón Rodríguez Pecharromán Firmado:... Fecha:.../.../... Vº Bº del Coordinador de Proyectos Álvaro Sánchez Miralles Firmado:... Fecha:.../.../...
4 UNIVERSIDAD PONTIFICIA COMILLAS ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA (ICAI) INGENIERO INDUSTRIAL PROYECTO FIN DE CARRERA CLIMATIZACIÓN MEDIANTE CÉLULAS PELTIER AUTOR: ROCÍO HERRANZ PINDADO MADRID, Septiembre de 2008
5 Resumen I CLIMATIZACIÓN MEDIANTE CÉLULAS PELTIER Autor: Herranz Pindado, Rocío. Director: Rodríguez Pecharromán, Ramón. Entidad Colaboradora: ICAI-Universidad Pontificia Comillas. RESUMEN DEL PROYECTO El proyecto Climatización mediante células Peltier estudia el control de la temperatura de un flujo de aire enfriado por células Peltier. Este proyecto se engloba dentro de las tecnologías especiales de transformación, más en concreto de la termoelectricidad. La tecnología termoeléctrica en el campo de la climatización y/o refrigeración basada en el principio del efecto Peltier, permite el bombeo de calor de un foco frío a un foco caliente cuando circula una corriente eléctrica. El efecto Peltier ocurre cuando una corriente pasa a través de dos materiales semiconductores (tipo n y tipo p) que están conectados entre sí por puentes eléctricos. La corriente origina una transferencia de calor desde una unión hasta la otra, de tal forma que una unión se enfría mientras que la otra se calienta. Las células Peltier comerciales, constan de tres elementos principales: placas cerámicas, puentes eléctricos y termoelementos. Figura 1: Célula Peltier. El principal objetivo de este proyecto es el control de la temperatura de un flujo de aire en la denominada Unidad de Refrigeración Local (URL). El prototipo URL es un pequeño dispositivo que podría denominarse ventilador activo ya que crea un flujo de aire, pero además lo enfría o lo calienta según convenga en cada caso. Se analiza el comportamiento del sistema con el objetivo de controlarlo de manera óptima, teniendo en cuenta el máximo aprovechamiento de las células Peltier y la eficiencia energética.
6 Resumen II Figura 2: Prototipo Unidad de refrigeración local. La unidad descrita consta de cuatro células Peltier, dos disipadores, dos ventiladores, una tobera y un soporte de metacrilato. El prototipo está destinado a refrigeración local en ambiente no climatizado o como complemento para conseguir condiciones de confort térmico para una persona a través de un chorro de aire frío dirigido hacia ella, en un ambiente climatizado. El proyecto consiste, en primer lugar, en poner en funcionamiento el prototipo empleando una placa de alimentación diseñada en anteriores proyectos y al mismo tiempo analizar la corriente de alimentación al módulo termoeléctrico. En este análisis se midió un rizado de corriente muy elevado por lo que se diseñó un filtro inductivo para obtener un mayor rendimiento de las células. El siguiente paso fue la identificación del sistema. Para ello se desarrolló una aplicación utilizando el software Labview, que permite medir y llevar a cabo acciones de control a través del hardware de adquisición y generación de datos de National Instruments. Software LabVIEW USB Hardware DAQ Adquisición de temperaturas Adquisición de P1-8 Tensión de mando 40 V AC Alimentación del servoamplificador 55 V DC Servoamplificador 12A8 3.5 A max Filtro L Módulo termoeléctrico Red 230 V AC Transformador ALIMENTACIÓN DEL MÓDULO TERMOELÉCTRICO 20 V AC Reguladores de tensión 12 V DC Ventiladores ALIMENTACIÓN DE LOS VENTILADORES Figura 3: Esquema del sistema.
7 Resumen III En la identificación del sistema, la estructura del modelo se ha basado en los principios físicos que tienen lugar, que son los efectos Seebeck, Fourier y Joule. El modelo obtenido por este método es un modelo de segundo orden con una ganancia estática de -3.03, un cero positivo y dos polos negativos. Sin embargo, al validar el modelo con ensayos reales en lazo cerrado, el modelo obtenido no refleja el comportamiento real del sistema térmico, por lo que se decidió aplicar el método de modelado por caja negra. El modelado por caja negra se ha realizado a partir de un ensayo en lazo cerrado con un control proporcional. La estructura del modelo se mantiene fija e igual a la obtenida aplicando los principios físicos. Los parámetros del modelo se obtienen realizando un ajuste por mínimos cuadrados. La siguiente función de transferencia, que se obtiene aplicando técnicas de mínimos cuadrados, representa el mejor modelo obtenido para realizar el diseño del control de temperatura del flujo de aire que proporciona el prototipo. P () s = ( s 0. 37) ( s ) ( s ) Finalmente a partir de este modelo se diseña un control PI para el control de la temperatura del flujo de aire. La respuesta del control diseñado se muestra en la Figura 4, se puede apreciar que el resultado es satisfactorio, ya que la temperatura controlada sigue a la consigna con rapidez y precisión Tª controlada Tª ambiente Tª caliente Tª fría Tª referencia 30 Temperatura (ºC) Tiempo (min) Figura 4: Respuesta de un ensayo con un control PI.

8 Abstract I AIR-CONDITIONING WITH PELTIER CELLS Author: Herranz Pindado, Rocío. Manager: Rodríguez Pecharromán, Ramón. Collaborating Entity: ICAI-Universidad Pontificia Comillas. ABSTRACT The Air-Conditioning with Peltier Cells project studies the temperature control of an output airflow, which is cooled by Peltier cells. The project is based upon thermoelectricity, one of the special transformation technologies. Thermoelectric technology in the field of the air conditioning and/or refrigeration is based on the Peltier effect, which allows heat to be pumped from a cold area to a warm area when an electrical current flows. The Peltier effect is observed when an electrical current crosses two semiconductor materials (type n and type p) that are connected by electrical conductors. The current creates a heat transfer from one junction to another junction, so that one junction increases its temperature whereas the other junction becomes colder. Commercial Peltier cells consist of three elements: ceramic boards, electrical conductors and thermo-elements. Figure 1: Peltier cell. The main objective of this project is temperature control of the output airflow of the so-called Local Refrigeration Unit (LRU). The prototype LRU is a small device that could be described as an active fan, in that it creates an airflow which is cold or hot as desired. The project studies system behaviour with the purpose of optimizing control systems, maximizing Peltier cell use and taking energy efficiency into account.
9 Abstract II Figure 2: Prototype Local Refrigeration Unit. The described unit consists of four Peltier cells, two heat sinks, two fans, a nozzle and a Perspex support. The prototype is designed for local cooling in an environment without air conditioning, or for complementary local cooling or heating in an environment with air conditioning, providing additional comfort. The first step of the project consisted in getting the prototype working using a power supply designed in a previous project. At the same time the input current to the thermoelectric module was analyzed. In order to reduce power supply noise and improve Peltier cell efficiency an inductive filter was designed. The next step was system identification. A controller was implemented in Labview using National Instruments data acquisition hardware. Software LabVIEW USB Hardware DAQ Temperature acquisition P1-8 acquisition Control voltage 40 V AC Voltage input servo amplifier 55 V DC Servo amplifier 12A8 3.5 A max Filter L Thermoelectric module 230 V AC Transformer POWER SUPPLY OF THE THERMOELECTRIC MODULE 20 V AC Voltage regulators 12 V DC Fans POWER SUPPLY OF THE FANS Figure 3: Diagram of the device.
10 Abstract III The structure of the model used in system identification is based upon the physical processes: Seebeck effect, Fourier effect and Joule effect. The model obtained by this method is a second order with a static gain of -3.03, one positive zero and two negative poles. However, the predictions of the model did not correspond with observed system behaviour. Hence it was decided to do system identification using the black box method. Black box modelling has been done using a closed-loop experiment with a proportional controller. The model obtained using the black box method has the same structure as the model derived from the physical processes. The following transfer function has been determined using the least squares method. It is the best system model for designing the air temperature controller. P () s = ( s 0. 37) ( s ) ( s ) Using this system model a PI controller for airflow temperature has been designed. The controllers response is shown in Figure 4. The result is successful and it can be seen that the controlled temperature follows the setpoint accurately and quickly Output temperature Ambient temperature Hot temperature Cold temperature Setpoint 30 Temperature (ºC) Time (min) Figure 4: Closed-loop experiment with control PI.
11 AGRADECIMIENTOS En primer lugar quisiera expresar mi agradecimiento a Ramón Rodríguez Pecharromán, director de este proyecto, por su disposición en todo momento para resolver cualquier duda surgida durante el mismo. A mis amigos por su interés y los ánimos que me han ido dando durante todo el curso. A mi familia y especialmente a mis padres, a los que dedico este proyecto porque gracias a su apoyo constante, ayuda y esfuerzo he logrado culminar mis estudios.
12 1 Memoria
13 ÍNDICE Parte I Memoria...5 Capítulo 1 Introducción Estudio de las tecnologías existentes Motivación del proyecto Objetivos Metodología Recursos Unidad de refrigeración local Hardware de acondicionamiento de la señal Hardware de alimentación del módulo termoeléctrico Sistemas de medida Otros recursos...19 Capítulo 2 Termoelectricidad Introducción Reseña histórica Fundamentos teóricos Efecto Seebeck Efecto Peltier Efecto Thomson Módulos termoeléctricos Características Curvas de los módulos termoeléctricos Capítulo 3 Unidad de refrigeración local Diseño del prototipo Montaje del módulo termoeléctrico Adquisición y generación de datos Instrumentación del prototipo URL Memoria. Índice 2
14 Adquisición de datos Generación de datos Hardware de DAQ Alimentación Etapa de potencia Alimentación del módulo termoeléctrico Alimentación de los ventiladores Estudio de la corriente de la alimentación Diseño del filtro L Análisis de la señal P1-8 del servoamplificador Puesta en marcha del URL Capítulo 4 Identificación del sistema Modelado basado en principios físicos Modelo del sistema Obtención de los parámetros Validación del modelo Modelado por caja negra Modelo y obtención de los parámetros Validación del modelo Conclusión Capítulo 5 Control de la temperatura Diseño del control Implantación del control Respuesta del ensayo Comparación entre el ensayo y la simulación Capítulo 6 Resultados Alimentación del módulo termoeléctrico Modelo del sistema Modelado basado en principios físicos Modelado por caja negra Memoria. Índice 3
15 6.3 Control de la temperatura Capítulo 7 Conclusiones Capítulo 8 Futuros desarrollos Bibliografía Parte II Estudio económico Estudio económico Parte III Manual del usuario Introducción Labview Estructura del control PID Ensayo en lazo abierto Ensayo en lazo cerrado Parte IV Código Modelado Control PI Parte V Datasheets Transformador Puente rectificador BR Regulador de tensión MC7812C Servoamplificador 12A Bobinas Módulo termoeléctrico DT Termopar tipo K Hardware de National Instruments Memoria. Índice 4
16 Parte I MEMORIA Memoria 5
17 Capítulo 1 INTRODUCCIÓN En este capítulo se hace la introducción del proyecto. En la sección Estudio de las tecnologías existentes se resumen y analizan los diferentes desarrollos tecnológicos relacionados con el tema del proyecto, módulos termoeléctricos y controladores de temperatura. A continuación en la sección Motivación del proyecto se presentan las razones que hacen de éste un proyecto interesante y por las que se ha decidido desarrollar este proyecto fin de carrera. Los objetivos se concretan en la sección Objetivos donde se definen claramente los propósitos de este trabajo. Finalmente, en las secciones Metodología y Recursos se expone el proceso, compuesto por diversos objetivos secundarios o etapas, seguido para la consecución de los distintos objetivos del proyecto, proceso que en capítulos posteriores se detallará convenientemente, así como los recursos empleados en él. Memoria. Introducción 6
18 1.1 Estudio de las tecnologías existentes Las aplicaciones industriales de los módulos termoeléctricos han sido escasas hasta el momento. Es ahora cuando están siendo empleados, principalmente para la refrigeración de microprocesadores y pequeños equipos frigoríficos entre otras aplicaciones. En los últimos años la termoelectricidad ha avanzado enormemente, cada día hay mayor interés en esta rama de la física, los estudios son numerosos, especialmente en aplicaciones en las cuales un control preciso de la temperatura es necesario. El hecho de poder refrigerar o calentar una zona concreta y de reducido tamaño permite abrir una gran puerta a la termoelectricidad. Es muy posible que a medio plazo y teniendo en cuenta que los semiconductores mejoran día a día por el desarrollo e investigación de estos materiales, la posibilidad de mantener una temperatura idónea dentro de las viviendas sea posible gracias a esta tecnología. Actualmente en el mercado existen numerosas empresas que comercializan módulos termoeléctricos que incorporan un conjunto completo de controladores de temperatura y procesos. La mayoría de estos dispositivos disponen de un microprocesador que, mediante la acción de un control PID, proporciona una actuación rápida y precisa. Mediante el control automático se consigue mantener la temperatura en un valor preestablecido. Para ello se compara la medida con dicho valor preestablecido y, en función de la diferencia, se procede a modificar la acción del actuador. Los equipos comerciales pueden visualizar la temperatura medida y disponen de selectores para fijar los parámetros del regulador (Figura 1.1). Memoria. Introducción 7
.")
.")
19 Figura 1.1: Controlador de temperatura ( La empresa TE Technology, Inc. ofrece numerosos controladores de temperatura por medio de células Peltier (Figura 1.2). Estos controladores emplean la modulación PWM que no causa daños a los módulos termoeléctricos y proporcionan la corriente adecuada a los mismos para realizar el control de temperatura. Figura 1.2: Controlador de temperatura modelo TC ( Sea cual sea la tecnología de control, el error es la base a partir de la cual actúa un control. Cuanto más precisa sea la medida mejor se podrá Memoria. Introducción 8
20 controlar la variable, pero en algunos casos la precisión en las medidas requiere mucho tiempo de cálculo, lo que encarece los equipos de hardware y en ocasiones de software. En muchos de estos equipos la adquisición de temperaturas se realiza a través de termopares [1], que son dispositivos formados por la unión de dos metales distintos que produce un voltaje que es función de la diferencia de temperatura entre los extremos del dispositivo. También se debe pensar en la instalación, en la forma en que se transmiten los datos del sensor hacia el regulador y posibles fuentes de interferencias. Los actuadores son aquellos elementos que pueden provocar un efecto sobre el sistema controlado. El actuador recibe la orden de un regulador o controlador y da la salida necesaria para activar a un elemento final de control. En los procesos que requieren un control de temperatura, los actuadotes empleados son resistencias eléctricas, ventiladores, extractores, entre otros. Estos actuadores son dispositivos en donde la corriente eléctrica produce una pérdida de energía que se transforma en calor. El calor produce un incremento de la temperatura sobre el sistema. En este proyecto se emplean como actuadores módulos termoeléctricos que presentan grandes ventajas frente a los tradicionales, cuando se trata de enfriar un medio o un flujo de aire. El control automático desempeña un papel importante en los procesos de manufactura, industriales, navales, aeroespaciales, robótica, químicos. De ahí que el control automático esté ligado a prácticamente todas las ingenierías (eléctrica, electrónica, aeronáutica, mecánica, sistemas, industrial, química, etc.). La selección del control apropiado para una aplicación dada, depende del grado de control requerido por la aplicación. Los tipos de control más comunes en los equipos comerciales [2] son: control on/off, control PID con acción proporcional y control PID con acción proporcional, integral y diferencial. Memoria. Introducción 9
21 Control on/off. Es la regulación más simple y económica, adecuada para aquellas aplicaciones en las que puede admitirse una oscilación continua alrededor del valor adecuado, siempre y cuando se trate de procesos de evolución lenta. Gracias a la existencia de una banda de histéresis (Figura 1.3), el número de conmutaciones se reduce notablemente. Sin histéresis, el actuador se activaría y desactivaría con demasiada frecuencia. Su respuesta es de tipo todo-nada, de forma que se conecta cuando la variable regulada ha descendido hasta un valor -U por debajo del punto de consigna c y solo se desconecta cuando llega a otro valor +U por encima del punto de consigna. Así se establece un margen de variación en el que mantiene su estado el actuador. Figura 1.3: Control on/off. Control PID con acción proporcional. Hay procesos que necesitan una respuesta más precisa que la que puede proporcionar el control on/off. El control proporcional genera una respuesta que es proporcional a la señal de error (diferencia entre la respuesta y la referencia). Para una consigna determinada cuanto mayor es la ganancia del control proporcional, menor es la señal de error. Por Memoria. Introducción 10
22 tanto, el aumento de la ganancia del control permite reducir el error en régimen permanente. Con este tipo de control siempre habrá una señal de error, ya que en caso contrario la señal de mando sería nula y la señal controlada también. Control PID. Es el algoritmo de control más ampliamente extendido, pero existen muchos otros métodos que pueden dar un control de mayor calidad en ciertas situaciones donde el control PID no responde a la perfección. Un regulador Proporcional-Integral-Derivativo o PID tiene en cuenta el error, la integral del error y la derivada del error (Figura 1.4). La acción proporcional hace que el control PID responda enérgicamente cuando el error es grande. La acción integral hace que el error sea nulo y la acción diferencial permita alcanzar el valor deseado con una mayor rapidez. Figura 1.4: Control PID. Existen algunas ocasiones en que el control PID puede mejorarse notablemente mediante el empleo de un esquema de control denominado en cascada que se emplea para mejorar el rechazo a las perturbaciones del lazo. Memoria. Introducción 11
23 1.2 Motivación del proyecto Este proyecto está inmerso en un nuevo enfoque del uso de la energía basada en la termoelectricidad. Esta técnica estudia la generación de la energía eléctrica a partir de calor residual o el proceso inverso de producción de calor o frío mediante la circulación de una corriente por un material termoeléctrico. El proyecto desarrollado se enmarca dentro de una línea de trabajo de la Universidad en relación a la termoelectricidad, como es la patente del Parámetro Transparente Activo Termoeléctrico (PTA) [3], que se refiere a un sistema de bombeo de calor por efecto Peltier pensado para climatización en edificación. Las células Peltier se pueden usar en el control de temperatura de diferentes aplicaciones y dispositivos de pequeñas dimensiones. Este es el cuarto proyecto fin de carrera en el que se estudia el uso del efecto Peltier para climatización. El proyecto se dedica a optimizar el control de la temperatura de un flujo de aire en la denominada Unidad de Refrigeración Local (URL). Es un pequeño dispositivo que podría denominarse ventilador activo ya que crea un flujo de aire, pero además lo enfría o lo calienta según convenga en cada caso. El desarrollo de circuitos de refrigeración basados en elementos Peltier, como alternativa a los refrigerantes convencionales de origen orgánico (agua, amoniaco) y de origen inorgánico (CFC`s, HCFC`s) que resultan muy contaminantes, ha ido en aumento en los últimos años. Estos presentan grandes ventajas respecto a los antiguos sistemas de climatización: por un lado, no es necesario el uso de combustibles dado que la única fuente de alimentación que se necesita es eléctrica y, además, el volumen ocupado es muy reducido en comparación con esos métodos. El efecto Peltier consiste en el enfriamiento o calentamiento de una unión entre dos conductores distintos al pasar una corriente eléctrica por Memoria. Introducción 12
24 ella y depende exclusivamente de la composición y temperatura de la unión. Las células Peltier hacen de bombas de calor donde toman calor de un foco frío y lo ceden a un foco caliente. Estos módulos termoeléctricos tienen ciertas ventajas, como son: la producción de frío y calor indistintamente invirtiendo la polaridad de la tensión aplicada, ser totalmente silenciosos y no producir vibraciones, fácil variación de la potencia refrigerante actuando sobre la tensión de alimentación, no poseen elementos móviles del tipo de compresores, condensadores, válvulas, etc. También presentan inconvenientes, por ejemplo, en el caso del uso de los módulos termoeléctricos para refrigeración es necesario disipar el calor del lado caliente de la célula Peltier. Por tanto los elementos críticos en este tipo de tecnología son los ventiladores para que haya un flujo de calor y los disipadores para eliminar el calor generado en el lado caliente y al calor disipado por los ventiladores. En las aplicaciones con módulos Peltier, el factor principal a tener en cuenta para la elección del módulo es el rango de temperatura al cual deben trabajar los semiconductores. Las aplicaciones más extendidas están en un rango de hasta 50 W. En general, el rendimiento o coeficiente de operación (COP) es precisamente un factor que se debe mejorar, se mide como el cociente entre el calor neto transportado y la potencia necesaria para producir el flujo de calor: Q neto COP = E. 1.1 P Para conseguir un aumento en el rendimiento es importante la geometría y las propiedades del semiconductor entre otros factores. Una de las desventajas de la termoelectricidad en comparación con otras tecnologías de refrigeración es el bajo COP, en cambio el coste de los equipos es bastante reducido. Otras diferencias con respecto a otras tecnologías se presentan en la Tabla 1.1. Memoria. Introducción 13
25 Son múltiples las aplicaciones de estas células y módulos termoeléctricos: sistemas de enfriamiento para neveras, armarios eléctricos industriales, cuadros electrónicos, equipos médicos, láser, telecomunicaciones, industria automovilística o ferrocarriles. Una de ellas es la que se desarrolla en este proyecto, que se centrará en la aplicación de las células para el enfriamiento de un flujo de aire. En él se presenta el problema de la refrigeración local en ambiente no climatizado y el conseguir condiciones de confort térmico para una persona localizada en un ambiente climatizado dirigiendo un chorro de aire frío hacia ella. Esto hace que la potencia calorífica a absorber por la unidad sea baja en comparación con las potencias manejadas en los sistemas de climatización tradicionales. Bomba de calor Equipo de absorción Termoelectricidad COP Alto Medio Bajo Coste Alto Alto Bajo Requerimientos Ninguno Fuente de calor Ninguno Ruido Mucho Poco Poco (ventilador) Portátil No No Si Dimensión Mediano Grande Pequeño Instalación Media Compleja Simple Impacto ambiental Medio Bajo Nulo Tabla 1.1: Comparación de tecnologías. Memoria. Introducción 14
26 1.3 Objetivos Los objetivos de este proyecto son: Diseño de la alimentación al módulo termoeléctrico. Debido a que este proyecto emplea parte del hardware del proyecto desarrollado en cursos anteriores en [4] y [5], es necesario analizar si la alimentación a las células Peltier del proyecto anterior es la adecuada para el nuevo prototipo, la unidad de refrigeración local, y estudiar el filtrado necesario de la señal de potencia, que afecta al rendimiento de las células. Identificación del sistema. Se trata de la obtención de un modelo del sistema a partir de un conjunto de ecuaciones que describan el comportamiento del sistema físico y de ensayos realizados con el prototipo. Para poder controlar el flujo de aire es muy importante definir un modelo del sistema térmico que nos permitirá definir el tipo de control a implantar. Control de la temperatura del flujo de aire en la unidad de refrigeración local (URL). Diseñar un control para el prototipo que cumpla con las especificaciones, determinar la estructura del control así como sus parámetros para alcanzar los objetivos marcados. Memoria. Introducción 15
27 1.4 Metodología En primer lugar se puso en funcionamiento la unidad de refrigeración local (URL), alimentando al módulo termoeléctrico con la placa diseñada en los proyectos anteriores y empelando el hardware de adquisición de datos y el software Labview para realizar los ensayos. En segundo lugar se realizaron las medidas necesarias para el análisis del filtrado de la corriente de alimentación a las células Peltier y analizando los resultados obtenidos se decidió, consultando la literatura existente de los elementos termoeléctricos, diseñar un nuevo filtro de la corriente de alimentación, para mejorar el rizado de la corriente y obtener así un mayor rendimiento de las células. A continuación se realizó una serie de ensayos para comprobar el funcionamiento del equipo ante los cambios realizados y confirmar que el diseño del filtro cumplía con todas las especificaciones impuestas. El siguiente paso fue la obtención del modelo del sistema térmico a controlar. Se empleó el método de identificación basado en principios físicos y mediante caja negra ya que el modelo obtenido con el primer método no se ajustaba adecuadamente a la realidad. A esta conclusión se llegó comparando las simulaciones realizadas con Simulink y la respuesta de los ensayos. Después se pasó a diseñar un control y se implantó para luego efectuar distintos ensayos. Finalmente se estudiaron los futuros desarrollos aplicables a este proyecto. Memoria. Introducción 16
28 1.5 Recursos El desarrollo del proyecto descrito hace necesario el manejo de diferentes herramientas, tanto de programación, como de hardware, ofimática, etc. A continuación se enumeran las herramientas utilizadas y se justifica su uso brevemente Unidad de refrigeración local Es el prototipo sobre el que se van a realizar los ensayos y las pruebas necesarias para el análisis del filtrado de la corriente de alimentación al módulo termoeléctrico y donde después se implantará el control. El prototipo, como se puede observar en la Figura 1.5, incluye cuatro módulos termoeléctricos comerciales con dos intercambiadores de calor y sendos ventiladores. El montaje se ha realizado sobre un soporte de metacrilato que separa los flujos de intercambio de calor de los dos lados del sistema. El funcionamiento del prototipo es totalmente reversible, pudiendo valer para enfriar el aire dirigido a la persona o bien para calentarlo. Se han instalado diversos sensores de temperatura en el equipo. Los sensores fundamentales son las temperaturas en las superficies de los módulos termoeléctricos y las temperaturas de entrada y salida de aire. Los ventiladores se alimentan con tensiones de hasta 12 V mediante la misma placa con la que se alimenta a las células termoeléctricas. Memoria. Introducción 17
. 1.5.")
29 Figura 1.5: Unidad de refrigeración local (URL) Hardware de acondicionamiento de la señal Para la adquisición de las temperaturas, medidas a través de termopares situados en el prototipo URL, de las señales de control y para la generación de la señal de mando, se emplea un hardware de adquisición de datos de National Instruments. El hardware se comunica con el ordenador a través de una conexión USB y es específico para su funcionamiento con Labview, en el apartado del Capítulo 3 están definidas sus principales características Hardware de alimentación del módulo termoeléctrico El circuito de alimentación está formado por un amplificador y la alimentación de éste. La alimentación del amplificador convierte la tensión de 220V de la red a una tensión continua de 55 V mediante un rectificador de puente de diodos con un filtro RC. La placa también proporciona una tensión de 12 V para alimentar los ventiladores. Memoria. Introducción 18
30 El amplificador suministra al módulo termoeléctrico la energía necesaria para que el flujo de aire de salida alcance la temperatura deseada. Dicho amplificador es el 12A8 de Advanced Motion Controls Sistemas de medida Para la realización de este proyecto es necesario el uso de instrumentos de medida disponibles en los laboratorios del departamento de electrónica de la Universidad Pontificia Comillas. Los instrumentos de medida necesarios son: Polímetro. Osciloscopio. Sonda amperimétrica. Medidor de impedancias Otros recursos Para realizar los ensayos es necesario el uso de un Pocket PC con Procesador Intel Pentium GHz, con memoria RAM 256MB y disco duro 80 GB. También dispone de tarjeta de red, de modem interno de 56 Kbps, Microsoft Windows XP Home Edition y Paquete Office XP. También se han necesitado los programas Matlab 7.0 R14 o superior y Labview 7.1. Memoria. Introducción 19
31 Capítulo 2 TERMOELECTRICIDAD Este capítulo tiene como propósito introducir al lector en el mundo de la termoelectricidad y los efectos que en ella se dan. En primer lugar se realiza un prologo y a continuación una breve reseña histórica sobre los personajes que más influyeron en esta ciencia. En la sección Fundamentos teóricos se explican los principios fundamentales de los efectos termoeléctricos que se dan en este proyecto. Finalmente en el último apartado Módulos termoeléctricos se explica el funcionamiento de los mismos así como sus principales características. Memoria. Termoelectricidad 20

32 2.1 Introducción El impacto negativo sobre el ambiente de los combustibles fósiles exige la utilización de fuentes alternativas de energía. Una de esas fuentes es la producción de energía utilizando el fenómeno de la termoelectricidad. La termoelectricidad es la rama de la termodinámica superpuesta a la electricidad donde se estudian los fenómenos en los que la electricidad y el calor intervienen. Se sabe desde el siglo XIX, tras los trabajos de Seebeck y Peltier, que la conexión de dos materiales diferentes que se encuentran a distinta temperatura puede generar una corriente eléctrica. Dicha fuente de energía está comenzando a ser explotada y desarrollada, el mayor inconveniente que impide la generalización del uso de la termoelectricidad es la eficiencia de los materiales Reseña histórica Los principios físicos sobre los que se fundamenta la termoelectricidad datan del siglo XIX. En 1821 el científico alemán Thomas Seebeck [6] descubrió que si se unen dos alambres por sus extremos y se mantiene una temperatura superior en un extremo que en otro aparece una diferencia de tensión que hace fluir una corriente entre las uniones fría y caliente. Figura 2.1: Jean Peltier. Memoria. Termoelectricidad 21
33 En 1834 el científico francés Jean Peltier [6] investigando el efecto Seebeck descubrió que había un fenómeno que consistía en hacer pasar una corriente por un circuito de materiales diferentes cuyas uniones están a una cierta temperatura, obteniendo el efecto inverso al efecto Seebeck, es decir se absorbe calor en una unión y se desprende en la otra. Veinte años después, William Thomson, conocido como Lord Kelvin, da una explicación de los efectos Seebeck y Peltier y describe su interrelación en el efecto Thomson que se produce en un circuito de un único material conductor, según el sentido de paso de la corriente eléctrica, el conductor emite o absorbe calor. En la década de los treinta del siglo pasado, científicos rusos reactivan los trabajos de la termoelectricidad llamando así la atención del resto del mundo por la aplicación de estos fenómenos. A partir de 1960 se comercializa el uso de la termoelectricidad por el empleo de semiconductores que dieron mayor rendimiento Memoria. Termoelectricidad 22
34 2.2 Fundamentos teóricos Para el correcto entendimiento del funcionamiento de la bomba de calor hace falta conocer los fundamentos teóricos de los fenómenos termoeléctricos y físicos que ocurren en un termoelemento. En este apartado se trata de explicar los fenómenos que tienen lugar cuando se hace circular una corriente a través de un termoelemento. La existencia de estos fenómenos es lo que permite utilizar el módulo termoeléctrico como bomba de calor. La conversión de energía por efecto termoeléctrico, conversión de calor en electricidad o electricidad en calor, se basa en los efectos Seebeck, Peltier y Thomson, mencionados en la sección A continuación se explica brevemente cada unos de estos efectos Efecto Seebeck El efecto Seebeck es una conversión neta de energía térmica en energía eléctrica bajo la condición de intensidad de corriente nula [7]. Es el efecto en el que se basan los termopares. Las condiciones bajo las que se produce son: Conductores distintos, material X y material Y, conectados en circuito abierto. Gradiente térmico T impuesto entre las uniones A y B. El efecto producido es la aparición de un potencial eléctrico, V 0 (Figura 2.2) proporcional al gradiente térmico impuesto. La constante de proporcionalidad α XY se denomina coeficiente termoeléctrico dado en V/K o V/ºC. Memoria. Termoelectricidad 23
35 T h V = α dt E. 2.1 o T c XY Figura 2.2: Circuito efecto Seebeck ( Efecto Peltier Se refiere a la absorción o cesión de calor que tiene lugar cuando una corriente eléctrica circula a lo largo de un conductor no homogéneo, o cruza la unión entre dos materiales conductores distintos. Las condiciones bajo las que se produce son: Conductor no homogéneo (o unión entre conductores distintos) por el que circula una intensidad de corriente I generada por la aplicación de una tensión V in. El efecto producido es un flujo de calor transversal al conductor no homogéneo (o a la unión), de valor: q P ( α α ) = I T E. 2.2 X Y En la Figura 2.3 se ilustra el efecto Peltier. Memoria. Termoelectricidad 24
36 Figura 2.3: Circuito efecto Peltier ( En las células Peltier aparecerán dos efectos irreversibles no nombrados hasta ahora: Efecto Joule Este efecto consiste en un flujo de calor transversal que aparece al circular una intensidad de corriente eléctrica I (Figura 2.4), por un conductor de resistencia eléctrica R, de valor: q J = I 2 R E. 2.3 R I EΔ Figura 2.4: Esquema del efecto Joule. Efecto Fourier El efecto Fourier da lugar a un flujo de calor longitudinal (Figura 2.5) que aparece en un conductor térmico de conductividad térmica K en presencia de un gradiente de temperaturas Τ, de valor: Memoria. Termoelectricidad 25
37 q F K = Ax ΔT E. 2.4 L T 2 > T 1 T 2 T 1 q F Figura 2.5: Esquema del efecto Fourier Efecto Thomson Se refiere a la absorción o cesión de calor que tiene lugar cuando una corriente eléctrica circula a lo largo de un conductor homogéneo sometido a un gradiente de temperaturas entre sus extremos (Figura 2.6). El efecto Thomson es reversible, es decir el flujo de calor cambia de sentido al cambiar el sentido de la intensidad. T 2 T 1 I EΔ Figura 2.6: Esquema del efecto Thomson. Memoria. Termoelectricidad 26
38 Las condiciones bajo las que se produce son: Conductor homogéneo por el que circula una intensidad de corriente I. Gradiente térmico T entre sus extremos. El efecto producido es la aparición de un potencial eléctrico V T, proporcional al gradiente térmico impuesto, que da un flujo calor q T. V T = T 2 T 1 dα T dt dt E. 2.5 q = I E. 2.6 T V T Memoria. Termoelectricidad 27
39 2.3 Módulos termoeléctricos Características Existen en el mercado dos tipos de módulos o elementos, los módulos o células de efecto Peltier que se utilizan para enfriar o calentar y los módulos de efecto Seebeck para generar corriente eléctrica. Las células Peltier son las más empleadas debido a que su coste es cada vez menor y sus aplicaciones para el mercado del consumo se incrementan día a día. Las placas de efecto Seebeck son las de mayor coste. Un módulo termoeléctrico comercial consiste en la unión de varios pares de semiconductores tipo p (huecos libres) y tipo n (cargas libres) conectados térmicamente en paralelo y eléctricamente en serie para aumentar la tensión eléctrica de operación del mismo. Los semiconductores se conectan entre sí a través de buenos conductores eléctricos como el cobre utilizando uniones soldadas con materiales con bajo punto de fusión para no dañar los termoelementos durante el proceso de soldadura. Estos puentes eléctricos tienen que estar aislados eléctricamente del objeto a refrigerar para evitar cortocircuitos. Sin embargo, este material aislante eléctrico debe de ser un buen conductor térmico para minimizar el salto térmico entre el par termoeléctrico y el objeto. El funcionamiento de estos elementos termoeléctricos es el siguiente: si a la soldadura que une los pares semiconductores se le aplica calor manteniéndose una temperatura caliente en un extremo, mientras que el otro extremo se mantiene a una temperatura más fría, se produce una fuerza electromotriz que genera una corriente eléctrica en el circuito [7]. Memoria. Termoelectricidad 28

40 Figura 2.7: Módulo termoeléctrico funcionando como refrigerador ( De forma parecida, debido al efecto Peltier, si se hace pasar una corriente por el circuito de uniones semiconductoras p-n y n-p (Figura 2.7), unas se calientan y otras se enfrían produciéndose un gradiente de temperatura entre las placas (Figura 2.8). Desde el punto de vista térmico, los elementos termoeléctricos actúan como una pequeña bomba de calor. Figura 2.8: Módulo termoeléctrico. Memoria. Termoelectricidad 29

41 Un módulo termoeléctrico comercial consta de tres elementos principales: Termoelementos. Puentes eléctricos. Placas cerámicas u otros materiales que sean a la vez buenos aislantes eléctricos y buenos conductores térmicos. Hay que tener en cuenta un aspecto fundamental de los módulos termoeléctricos: las uniones soldadas entre los diferentes componentes. Como ya se ha comentado, los termoelementos se sueldan a los puentes eléctricos mediante aleaciones con un punto de fusión relativamente bajo. Uno de los compuestos eutécticos más utilizados es una aleación de bismuto y estaño (58% Bi y 42% Sn con punto de fusión en 138 ºC). En el caso de que el módulo termoeléctrico vaya a trabajar en un rango de temperaturas superior a 80 ºC, se suelen emplear aleaciones con un punto de fusión más elevado, como son las aleaciones de estaño y plomo (63% Sn y 37% Pb, con punto de fusión en 183 ºC) según se cita en [8]. Por este motivo hay que tener en cuenta el rango de temperaturas a las que trabaje el módulo, y considerar que debería haber un diseño y modelo para cada aplicación para sacar el máximo rendimiento de los módulos. El aspecto real de una célula Peltier se puede observar en la Figura 2.9. Figura 2.9: Célula Peltier ( Memoria. Termoelectricidad 30

![10: Módulo termoeléctrico multinivel (www.marlow.com). En los últimos años, nuevas técnicas de construcción han permitido el desarrollo de estos dispositivos en escalas micrométricas [9].](/docs-images/64/50941461/images/42-2.jpg "En la Figura 2.11 se observa una fotografía comparativa de los nuevos prototipos de refrigeradores termoeléctricos frente a las unidades estándar. En este caso, las dimensiones son 0,65 0,55 0,424 mm.")
42 También existen módulos multinivel (Figura 2.10) que permiten conseguir saltos térmicos importantes, pudiendo llegar incluso a diferencias de 130 ºC. Las potencias a disipar, a medida que se aumentan los gradientes de temperatura son cada vez menores, pero las ventajas de poder refrigerar puntualmente son muy importantes. Figura 2.10: Módulo termoeléctrico multinivel ( En los últimos años, nuevas técnicas de construcción han permitido el desarrollo de estos dispositivos en escalas micrométricas [9]. En la Figura 2.11 se observa una fotografía comparativa de los nuevos prototipos de refrigeradores termoeléctricos frente a las unidades estándar. En este caso, las dimensiones son 0,65 0,55 0,424 mm. Figura 2.11: Prototipo micrométrico de un módulo termoeléctrico ( Memoria. Termoelectricidad 31
43 2.3.2 Curvas de los módulos termoeléctricos En un módulo termoeléctrico hay cuatro variables que definen el comportamiento del mismo, que son: I. ΔT: La diferencia entre la temperatura del lado caliente y la temperatura del lado frío del módulo Δ T = T caliente T. frío II. III. IV. Q c : La potencia frigorífica bombeada por el dispositivo termoeléctrico. I: La corriente que alimenta al módulo termoeléctrico. V: La tensión aplicada a la célula. Estos variables están relacionados entre sí, dicha relación se muestra en la Figura La figura se emplea para obtener un modelo que defina el comportamiento de una célula Peltier. Muestra cómo varía la diferencia de temperaturas, entre los lados frío y caliente de un módulo termoeléctrico, en función de la intensidad de la corriente que circula por ella. Puede observarse cómo para condiciones en las cuales no exista carga térmica en el lado frío (Q c =0) se obtiene la máxima diferencia de temperatura. A medida que la diferencia de temperaturas entre las caras fría y caliente se reduce aumenta Q c, llegando a su valor máximo cuando dicha diferencia de temperaturas es nula. Se aprecia además el efecto de la intensidad de la corriente eléctrica en la diferencia de temperaturas. Para una misma Q c, podrá obtenerse un mayor ΔT a medida que aumenta la intensidad de la corriente que circula por la célula. En la curva de la parte inferior se muestra la influencia de la intensidad de la corriente en el voltaje medido. Puede observarse cómo para Q c elevado el voltaje será inferior que para Q c más pequeño. A partir de la Figura 2.12 conocidos dos variables, generalmente ΔT y Q c, se puede Memoria. Termoelectricidad 32
44 obtener la corriente y la tensión necesarias para producir el incremento de temperatura deseado. También se puede proceder de forma contraria, que ΔT y Q c se obtienen para una corriente y tensión proporcionadas. Por ejemplo, conocidos ΔT y Q c la corriente necesaria se obtiene trazando una línea vertical, debajo de la intersección de la línea ΔT y de la curva Q c. En la gráfica de la parte inferior la tensión se puede obtener haciendo AB EF =. BC FG Figura 2.12: Curvas de comportamiento de los módulos termoeléctricos ( Memoria. Termoelectricidad 33

45 Las células Peltier presentan diversas singularidades, que dificultan su linealización tal y como se detalla a continuación. En la Figura 2.13 puede observarse como un aumento de la corriente por el módulo no es garantía de un aumento en la potencia bombeada, siendo necesario tener en cuenta las temperaturas de la cara caliente y de la cara fría del módulo termoeléctrico para determinar la potencia bombeada, llegando a extremos en los cuales a pesar de presentar un gran flujo de corriente, el bombeo de potencia térmica es inexistente. Dicha peculiaridad deberá ser tenida en cuenta en la obtención del modelo del sistema térmico y el diseño del control. Figura 2.13: Curvas de la célula Peltier DT12-6 ( Memoria. Termoelectricidad 34
46 Capítulo 3 UNIDAD DE REFRIGERACIÓN LOCAL Este capítulo está dedicado al sistema térmico a estudio, al prototipo URL. En primer lugar se explican en el apartado Diseño del prototipo todos los detalles del diseño del mismo y sus características, a continuación se procede a mostrar los principales aspectos que hay que tener en cuenta a la hora de realizar el montaje del módulo termoeléctrico en la unidad de refrigeración local, estos detalles se encuentran en la sección Montaje del módulo termoeléctrico. En Adquisición y generación de datos se encuentra la instrumentación llevada a cabo sobre el prototipo así como una explicación del hardware de adquisición de National Instruments y las señales adquiridas y generadas por este hardware para poder realizar el control de la temperatura del flujo de aire que suministra el prototipo. Finalmente en el apartado Alimentación se resume todo lo relacionado con la alimentación al módulo termoeléctrico, en Etapa de potencia se explican cada una de las etapas de la placa de alimentación. Y en Estudio de la corriente de la alimentación se analiza el rizado de la corriente obtenido con el filtro diseñado en el proyecto anterior y se estudia si esta este rizado es adecuado para el buen funcionamiento del prototipo URL. Memoria. Unidad de refrigeración local 35

47 3.1 Diseño del prototipo Previo a la realización del prototipo, se procedió al estudio de la evolución del flujo de aire que abandona el equipo. Mediante el software Fluent se analizó la evolución de la corriente de aire una vez que abandona la unidad, de forma que estableciendo unas condiciones en el cuerpo receptor se pudiera estimar la potencia y características de las células termoeléctricas a instalar. Figura 3.1: Prototipo URL. Partiendo de los resultados obtenidos en el modelado con Fluent, se realizó un montaje que incluye cuatro módulos termoeléctricos comerciales con dos intercambiadores de calor y sendos ventiladores. El nuevo diseño cuenta con una tobera por donde se impulsa el aire que va dirigido hacia la persona, mientras que en el lado contrario existe un Memoria. Unidad de refrigeración local 36
48 disipador y un ventilador para intercambiar el calor residual. El montaje se realizó sobre un soporte de metacrilato con escuadras en aluminio para la unión de las tres planchas, como se observa en la Figura 3.1, que separa los flujos de intercambio de calor de los dos lados del sistema Figura 3.2: Dimensiones en mm. del prototipo URL. La elección del metacrilato como soporte se basó fundamentalmente por la gran resistencia de dicho material, debido a que el conjunto módulo termoeléctrico, disipadores y ventiladores tienen un peso elevado, es necesario que la estructura que contenga dicho conjunto sea sólida y robusta. Por este motivo se empleó una plancha de metacrilato de 6 mm de espesor para soportar el conjunto, el resto de las dimensiones del prototipo URL se muestra en la Figura 3.2. Memoria. Unidad de refrigeración local 37
49 El funcionamiento del prototipo es totalmente reversible, pudiendo valer para enfriar el aire dirigido a la persona o bien para calentarlo, esta doble funcionalidad del prototipo se puede realizar cambiando la dirección de la corriente que alimenta a las células Peltier. Los dos intercambiadores de calor y los dos ventiladores son iguales. Sin embargo, dado que la potencia generada en el lado caliente es siempre mayor porque se debe evacuar el calor del lado frío más la potencia eléctrica que es consumida. Este hecho se tiene que tener en cuenta a la hora de decidir la dirección de flujos de aire que depende de la posición de los ventiladores. Cuando el sistema proporciona aire frío hacia el usuario, como se observa en la Figura 3.3, el calor a evacuar en la parte posterior es mucho mayor que el frío generado, sin embargo el sentido de flujo de aire del ventilador posterior hace que el intercambio de calor tenga mejor rendimiento. Figura 3.3: Sentido de los flujos de aire cuando funciona en modo refrigeración. Por el contrario cuando el objetivo es proporcionar calor al usuario el rendimiento sería peor, pero esto se compensa debido a que el proceso de generación de calor es más sencillo de conseguir. La Figura 3.4 muestra el sentido de los flujos de aire funcionando en modo calefacción. Memoria. Unidad de refrigeración local 38


50 Figura 3.4: Sentidos de los flujos de aire cuando funciona en modo calor. Una vez analizado los flujos de aire y decidido la disposición de los ventiladores se realizó la configuración definitiva, que se observa en la Figura 3.5, del conjunto ventilador disipador para el lado caliente y el lado frío del prototipo capaces de provocar un flujo de calor entre sus caras. Figura 3.5: Detalle del conjunto ventilador- disipador. Memoria. Unidad de refrigeración local 39

51 3.2 Montaje del módulo termoeléctrico Para el montaje de un módulo termoeléctrico se pueden emplear tres métodos: usando adhesivos, soldando el módulo o ejerciendo presión. Marlow Industries en [10] aconseja que si el módulo termoeléctrico tiene una base cerámica inferior a 19 mm se puede realizar el montaje del módulo con adhesivos sin que se produzcan fallos en el mismo debido a los flujos térmicos. Si la base es mayor que 19 mm se recomienda emplear el método de montaje por presión empleando una grasa térmica. En este proyecto la célula Peltier Marlow DT12-6 mide 40 mm por lo que se realizó el montaje ejerciendo presión con los intercambiadores de calor. El procedimiento para llevar a cabo el montaje de las células Peltier empieza preparando las superficies de los disipadores y del módulo, debiendo estar totalmente limpias y bien pulimentadas para tener la mayor transmisión de calor entre el disipador y el propio módulo termoeléctrico. Para una mayor transmisión entre el disipador y el módulo se aplicó una silicona para obtener una mayor transmisión de calor. Este proceso se debe hacer con ambas caras del módulo y con sus respectivos disipadores (Figura 3.6). Figura 3.6: Proceso de montaje de un módulo termoeléctrico. Memoria. Unidad de refrigeración local 40


52 La forma de medir la temperatura es mediante un termopar introducido en el interior de cada uno de los disipadores lo más cercano posible a las superficies de los módulos termoeléctricos, de esta forma la temperatura medida será casi exactamente la propia de la cara fría o caliente del módulo. Otro de los aspectos que más se ha cuidado en la construcción de este prototipo ha sido la presión uniforme de los intercambiadores de calor sobre los módulos termoeléctricos. Para ello se han construido unos perfiles de acero en L, como se puede observar en la Figura 3.7, que se han atornillado a los cuatro lados de cada intercambiador de calor y que permiten aplicar una presión sobre los módulos termoeléctricos que están situados entre los dos intercambiadores. Figura 3.7: Montaje de los intercambiadores de calor de la URL Detalle de tornillo con aislamiento. Aplicando el mismo par de apriete a todos los tornillos que mantienen unidos los intercambiadores entre sí, se garantiza que la presión ejercida sobre los cuatro módulos termoeléctricos sea la misma. Esto es importante Memoria. Unidad de refrigeración local 41

53 para que las características termodinámicas sean las mismas y que no se produzcan efectos de desequilibrio que hagan que un módulo transfiera la mayor parte del calor mientras los otros no actúan. Se ha puesto también especial cuidado en evitar puentes térmicos entre ambos lados, de forma que los tornillos que presionan los angulares lo hacen a través de arandelas aislantes, evitando así transferencia de calor a través de los tornillos. Figura 3.8: Detalle del montaje sobre el soporte de metacrilato. En la Figura 3.8 se muestra el montaje sobre el soporte, que es posible gracias a que algunos de los perfiles son más largos y pueden ser atornillados a la placa de metacrilato del soporte. El soporte tiene unas paredes planas suficientemente largas como para evitar que el aire de salida del intercambiador de calor trasero entre en el intercambiador de calor que actúa sobre la persona. Si la pared de metacrilato no fuese efectiva el sistema no funcionaría correctamente. Si por ejemplo el sistema funciona en modo de refrigeración hacia el usuario, el flujo de aire caliente Memoria. Unidad de refrigeración local 42
54 que sale del intercambiador de calor trasero en dirección radial, se mantiene en la parte trasera de la unidad gracias a la pared de metacrilato y no puede entrar en el intercambiador de calor del lado del usuario cuyo ventilador funciona en dirección contraria y por lo tanto toma el aire en dirección radial. Memoria. Unidad de refrigeración local 43
55 3.3 Adquisición y generación de datos Los sistemas de adquisición de datos (DAQ) basados en PC son usados en un amplio rango de aplicaciones en los laboratorios y en la industria. La adquisición de datos es el proceso que involucra la recopilación de datos de una forma automatizada a partir de fuentes analógicas y digitales, como sensores [11]. La adquisición de datos utiliza una combinación de medición de hardware y software para proporcionar un sistema de medida flexible y definido por el usuario. Hay cinco componentes que se consideran al construir un sistema básico de adquisición de datos: Transductores y sensores. Señales. Hardware de DAQ Controlador y software de aplicación. Los dos primeros ítems se exponen en la siguiente sección, donde se hace referencia a los sensores empleados y a las señales adquiridas y generadas para un análisis posterior del equipo. En el apartado se mencionan las principales características del hardware DAQ usado en este proyecto Instrumentación del prototipo URL Para poder realizar ensayos experimentales y analizar posteriormente el comportamiento del equipo durante estos ensayos era necesario realizar la instrumentación del equipo. La instrumentación del equipo se dividió en dos partes, una de adquisición o medida de datos y otra de generación de señales. Tanto la adquisición como la generación de datos se realizan a Memoria. Unidad de refrigeración local 44

56 través del hardware de National Instruments, cuyas principales características se explican en la sección Adquisición de datos En la adquisición de datos se miden dos señales de distinta naturaleza: temperaturas y tensiones. El prototipo tiene instalados un total de diez termopares tipo K, su distribución se observa en la Figura 3.9. Como el dispositivo cuenta con cuatro células Peltier dispuestas en serie, hay un termopar en cada una de las superficies de los módulos termoeléctricos (cara fría y cara caliente). Dichos sensores que miden la temperatura en la cara de los módulos están montados en pequeños taladros realizados en los intercambiadores de calor. Estos suman un total de ocho termopares los otros dos restantes se emplean para medir la temperatura ambiente que rodea al prototipo URL y para medir la temperatura de la salida del flujo de aire Figura 3.9: Situación de los termopares en el prototipo URL. Memoria. Unidad de refrigeración local 45
57 Termopar Célula Peltier Temperatura medida 1 1 Tª sobre la cara A 2 2 Tª sobre la cara A 3 3 Tª sobre la cara A 4 4 Tª sobre la cara A 5 1 Tª sobre la cara B 6 2 Tª sobre la cara B 7 3 Tª sobre la cara B 8 4 Tª sobre la cara B 9 - Tª ambiente 10 - Tª del chorro Tabla 3.1: Distribución de los termopares en el prototipo. La ventaja de usar termopares en la adquisición de las temperaturas es que son baratos, intercambiables, son capaces de medir un amplio rango de temperaturas y son ampliamente usados como sensores de temperatura. Su principal limitación es la exactitud ya que los errores del sistema inferiores a un grado centígrado son difíciles de obtener. Un termopar es la unión de dos alambres conductores con diferente composición metalúrgica como se muestra en la Figura Su funcionamiento consiste en la generación de una fuerza electromotriz que depende de la diferencia de temperatura de la junta caliente o de medida y la unión fría o de referencia, así como de la composición del termopar. Memoria. Unidad de refrigeración local 46
/aluminio (aleación de Ni-Al)), tienen un rango de temperatura de -200 ºC a +1.")

58 Figura 3.10: Funcionamiento de un termopar. Sonda real ( El esquema de la figura anterior corresponde a un termopar tipo K, modelo empleado en este proyecto. Estos termopares de cromo (Ni- Cr)/aluminio (aleación de Ni-Al)), tienen un rango de temperatura de -200 ºC a ºC y una sensibilidad 41 μv/ C aproximadamente adecuadas para las especificaciones requeridas Generación de datos La generación de datos, al igual que la adquisición se realiza a través del hardware de National Instruments. La señal generada es el mando del sistema de control, cuanta mayor diferencia haya entre la temperatura de referencia y la temperatura real, es decir, cuando hay un error, mayor es la corriente que hay que aplicar al módulo termoeléctrico para que se produzca una mayor transferencia de calor. Esta señal de mando está representada en la Figura 3.11 como cooler current. Memoria. Unidad de refrigeración local 47
59 Figura 3.11: Sistema de control de temperatura ( La señal de mando generada no se trata de una corriente que se aplica directamente sobre el módulo termoeléctrico, sino que es una tensión que se dirige al servoamplificador y se transforma en una corriente como se explica en la sección Hardware de DAQ El hardware de DAQ actúa como interfaz entre el PC y el mundo exterior. Es un dispositivo que entre otras funciones digitaliza señales analógicas de modo que el software pueda interpretarlas. Otras especificaciones de este hardware son: Entradas y salidas digitales. Entradas y salidas analógicas. Contadores y timers. En este proyecto se emplea un chasis SCXI-1000, es un sistema frontal de acondicionamiento de señales y conmutación para un gran número de canales con capacidad de conectividad por USB así como para diferentes dispositivos de medición, incluyendo tarjetas de adquisición de datos y multímetros digitales. SCXI está diseñado para grandes sistemas de medición o sistemas que requieren de adquisición a alta velocidad. Memoria. Unidad de refrigeración local 48
 en una sola plataforma. Figura 3.12: Chasis SCXI-1000 y módulo de acondicionamiento.")

60 Estos sistemas incluyen: Arquitectura modular. Capacidad de expansión: sistemas de hasta a canales. Integración: combinación de diferentes tipos de mediciones (E/S analógica, E/S digital, conmutación) en una sola plataforma. Figura 3.12: Chasis SCXI-1000 y módulo de acondicionamiento. El sistema SCXI consiste de un chasis robusto, Figura 3.12, en el cual se insertar módulos de acondicionamiento de señales que amplifican, filtran, aíslan, y multiplexan las señales analógicas de los diez termopares instalados en el prototipo. Los módulos de acondicionamiento de la señal que se instalaron en el chasis SCXI-1000 son: El módulo SCXI Es un bloque terminal de adquisición de datos para usarse con los módulos SCXI-1100, SCXI-1102 y SCXI-1102B/C. Diseñado específicamente para medidas de termopares de alta precisión, incluye construcción isotérmica que minimiza errores causados por gradientes térmicos entre terminales y el sensor de unión fría. El SCXI-1303 también incluye circuitos para detección de termopares Memoria. Unidad de refrigeración local 49
 desde el terminal de entrada negativa a tierra, de esta forma el sistema funciona de manera fiable y precisa ya sea con termopares")
61 abiertos así como referencia a tierra automática para termopares flotantes (sin tierra). El SCXI-1303 proporciona una trayectoria de alta impedancia (10 MΩ) desde el terminal de entrada negativa a tierra, de esta forma el sistema funciona de manera fiable y precisa ya sea con termopares flotantes o termopares a tierra. Al usarse con el SCXI-1100, se puede configurar los canales del SCXI-1303 para fuentes flotantes o referenciadas a tierra en bloques de ocho canales. El módulo SCXI Es un bloque terminal de generación de señales con 26 terminales de tornillo para conexiones de señal al módulo SCXI Como resumen de este apartado se presenta la Figura 3.13 que clarifica la conexión de los módulos con el chasis y con el prototipo. Las señales de entrada son las medidas que realizan los termopares y una señal de tensión que es proporcional a la corriente de salida del servoamplificador. La señal de salida es la señal de mando como se mencionó anteriormente en la sección de este capítulo. Figura 3.13: Conexión de los módulos del hardware DAQ. Memoria. Unidad de refrigeración local 50
62 3.4 Alimentación Esta sección contiene una explicación detallada del funcionamiento del circuito que compone la etapa de potencia del proyecto, así como el proceso de análisis de la corriente que alimenta al módulo termoeléctrico y de su rizado Etapa de potencia En este proyecto se denomina etapa de potencia a la parte del hardware que proporciona la corriente necesaria a las células Peltier instaladas en el prototipo. En este estudio también se incluye la alimentación de los ventiladores por estar incluida en la misma placa de alimentación a los módulos. Esta placa fue diseñada en un proyecto del curso [4] y modificada en el proyecto [5] del curso pasado. Se puede dividir en varios bloques como se muestra en la Figura 3.14: 40 V AC Alimentación del servoamplificador 55 V DC Servoamplificador 12A8 3.5 A max Filtro L Módulo termoeléctrico Red 230 V AC Transformador ALIMENTACIÓN DEL MÓDULO TERMOELÉCTRICO 20 V AC Reguladores de tensión 12 V DC Ventiladores ALIMENTACIÓN DE LOS VENTILADORES Figura 3.14: Esquema del hardware del equipo. En la figura anterior se observa cómo a partir de la tensión de red y por medio de un transformador, Figura 3.15, se obtienen las dos tensiones Memoria. Unidad de refrigeración local 51
63 alternas de 40 V para la alimentación de las células Peltier y 20 V para la alimentación a los ventiladores 40V ac y 20V ac 230V ac Transformador V Figura 3.15: Transformador empleado en la alimentación del equipo. A continuación se explica cada una de las dos ramas en que se divide la placa: alimentación del módulo termoeléctrico y alimentación de los ventiladores, secciones y respectivamente Alimentación del módulo termoeléctrico La alimentación de los módulos termoeléctricos se realiza mediante la placa citada anteriormente, que fue construida específicamente para este propósito. Como no tiene sentido hacer funcionar un módulo termoeléctrico de manera diferente a los demás, sólo se ha construido una placa, pero diseñada con potencia suficiente para alimentar los 4 módulos a la vez. Memoria. Unidad de refrigeración local 52
64 El esquema de esta parte del hardware es: Figura 3.16: Esquema del circuito de alimentación al módulo termoeléctrico. Alimentación del servoamplificador La tensión alterna de la red es reducida en el transformador hasta dos tensiones. De esta forma se obtiene una tensión de 40V en alterna con una toma intermedia a 20V. Los 40V de alterna son rectificados por medio de un puente rectificador, BR1010, con un filtro con condensador de 6,8 μf tal y como se muestra en la Figura 3.17, obteniendo una tensión de salida continua rectificada en torno a los 55V. Figura 3.17 : Formas de onda del rectificador con filtro por condensador. Memoria. Unidad de refrigeración local 53
65 En esta etapa del circuito se puede observar la presencia de un pequeño condensador cerámico en paralelo con un condensador electrolítico. El por qué de esta configuración es que el condensador electrolítico no trabaja bien en altas frecuencias, por lo que se hace necesario situar un condensador cerámico para trabajar con dichas frecuencias. También hay que destacar el montaje de una resistencia en paralelo con los condensadores. Dicha resistencia tiene la función de descargar los condensadores tras la desconexión del circuito, sin suponer de corriente importante mientras el circuito se encuentra conectado. Servoamplificador 12A8 y módulo termoeléctrico El amplificador es el encargado de suministrar al módulo termoeléctrico la energía suficiente para que éste sea capaz a su vez, de actuar sobre la temperatura del flujo de aire. El módulo termoeléctrico utilizado para el desarrollo del proyecto es el modelo DT12-6 de la casa Marlow y sus características principales son: Temperatura del lado caliente(ºc) ΔT max (ºC) Q max (W) I max (A) 5,6 5,6 V max (V) 14,7 16,4 AC resistencia(ω) 2,2 --- Tabla 3.2: Características del módulo termoeléctrico DT12-6. Memoria. Unidad de refrigeración local 54
66 En primer lugar se decidió optar por un amplificador controlado en corriente, ya que para el control del módulo termoeléctrico facilita la labor el conocimiento de la corriente consumida por el mismo. Optar por un amplificador controlado en tensión no tendría grandes desventajas frente a la fuente controlada por corriente. La gran ventaja de optar por un amplificador controlado en corriente es el conocimiento del comportamiento del módulo termoeléctrico en función de la corriente. Las gráficas que describen el comportamiento del módulo lo hacen relacionando la corriente y no la tensión con la potencia del módulo termoeléctrico como se mencionó en el Capítulo 2 en la sección Modelos 12A8 25A8 20A14 20A20 Tensión DC V V V V Pico de corriente (2 seg. max. Internamente limitada) Máxima corriente continua (internamente limitada) Mínima inductancia de carga ± 12 A ± 25 A ± 20 A ± 20 A ± 6 A ± 12.5 A ± 10 A ± 10 A 200 μh 200 μh 250 μh 250 μh Frecuencia switching 36 khz 22 khz ±15% Temperatura disipada 0 ºC a 65 ºC Potencia disipada 24 W 50 W 70 W 100 W Sobretensión 86 V 86 V 142 V 195 V Ancho de banda 2,5 khz Tabla 3.3: Características de los servoamplificadores Advanced Motion Controls. Memoria. Unidad de refrigeración local 55

67 El servoamplificador que se eligió en el proyecto fin de carrera del curso debía cumplir con las especificaciones dadas para el diseño y construcción del amplificador controlado. Con dichas especificaciones se decidió buscar servoamplificadores comerciales teniendo como referencia el utilizado en el laboratorio de Programación y Control de Robots. En la Tabla 3.3 se muestran las características técnicas del servoamplificador. Dicho servoamplificador es el 12A8 de la firma Advanced Motion Controls y cumple con las especificaciones fijadas. El aspecto externo del amplificador se aprecia en la Figura Las dimensiones aproximadas son de 12x6 cm. Figura 3.18: Servoamplificador 12A8 ( A continuación se pasa a hacer una breve descripción de dicho equipo. El esquema interno se muestra en la Figura 3.19, sin entrar en detalles como el bucle de control de corriente ni los disparos de los mosfet en la etapa de potencia. Memoria. Unidad de refrigeración local 56
68 La tensión registrada entre los pines P1-4 y P1-5 es amplificada y convertida en una corriente, en la Figura 3.16 se representa la conexión del pin P1-4 al hardware de DAQ mediante el conector J2, el pin P1-5 está conectado a tierra. Existe un bucle interno de realimentación, el cual garantiza que la corriente de salida sea fiel a la tensión registrada. Es posible anular la corriente de salida por medio de los pines P1-12 y P1-13. Figura 3.19: Esquema interno del servoamplificador 12A8 ( En caso de fallo en el sistema el LED de error (LED rojo) permanecerá encendido para indicarlo. El LED se ilumina en color verde mientras el funcionamiento sea correcto. La ganancia del circuito puede ser ajustada por medio del potenciómetro nº 3. Por medio de dicho potenciómetro es posible ajustar la relación entre el voltaje de entrada y la corriente de salida. Exista la posibilidad de Memoria. Unidad de refrigeración local 57
69 limitar la corriente de pico así como el límite de corriente continua para el servoamplificador por medio del potenciómetro número 2. La mecánica para llevar a cabo dicho ajuste es sencilla. Sólo hay que tener en cuenta que el potenciómetro tiene doce vueltas activas, así como una vuelta inactiva en cada extremo y tiene una resistencia aproximadamente lineal. Para llevar a cabo el ajuste, se recomienda girar el potenciómetro en sentido contrario a las agujas del reloj hasta el final del recorrido y a continuación girar el potenciómetro en sentido horario hasta llegar al valor deseado. También es posible limitar la corriente sin afectar a la corriente de pico por medio de una resistencia externa en el pin P1.10. Esta resistencia fue eliminada del circuito, ya que no se quería hacer uso de esta posibilidad. Además se puede monitorizar la corriente suministrada por el circuito como una tensión (el factor para pasarlo a una tensión es de 2A/V) en el pin P1-8. Esto es útil para evitar añadir etapas intermedias que muestren la corriente suministrada. Este pin es una de las entradas de la tarjeta de adquisición del hardware de acondicionamiento de la señal de National Instruments. Su conexión al DAQ está representada en la Figura 3.16 mediante el conector J3, de tal forma que en el transcurso de los ensayos se puede monitorizar y por tanto almacenar para un posterior análisis. Las medidas realizadas en la sección demuestran que la ganancia 2A/V en realidad es algo mayor. Para aclarar el funcionamiento del servoamplificador y el uso que se le da en este proyecto, se muestra en la Tabla 3.4 un resumen en el que se citan los pines empleados para obtener la corriente de alimentación al módulo termoeléctrico y una explicación de los mismos comentando sus principales características. Memoria. Unidad de refrigeración local 58
70 Conector Pin Nombre Descripción I/O 2 SIGNAL GND Conectado a tierra GND 4 +REF IN Entrada del servoampliicador, I 5 -REF IN es decir, salida del control I P1 8 CURRENT MONITOR OUT Esta señal es proporcional a la corriente que suministra el amplificador. El factor de escala es de 2A/V O 9 CURRENT REFERENCE OUT Máxima corriente del lazo interno del servoamplificador O 1 - MOTOR Salida que se dirige al filtro L y O 2 + MOTOR que alimenta a las células O P2 3,4 POWER GROUND Conexión a tierra GND 5 HIGH VOLTAGE Alimentación del servoamplificador, a través de un filtro con condensador I Tabla 3.4: Pines del servoamplificador 12A8 empleados en el proyecto Memoria. Unidad de refrigeración local 59
71 Filtro L El filtro que se diseñó en el proyecto del curso anterior es el que se muestra en la Figura 3.20: Figura 3.20: Esquema del filtro L y su conexión al servo. Finalmente en el siguiente diagrama de bloques se muestra la conexión entre el hardware DAQ de National Instruments y la placa de alimentación al módulo termoeléctrico. Software LabVIEW USB Hardware DAQ Adquisición de temperaturas Adquisición de P1-8 Tensión de mando 40 V AC Alimentación del servoamplificador 55 V DC Servoamplificador 12A8 3.5 A max Filtro L Módulo termoeléctrico Red 230 V AC Transformador ALIMENTACIÓN DEL MÓDULO TERMOELÉCTRICO 20 V AC Reguladores de tensión 12 V DC Ventiladores ALIMENTACIÓN DE LOS VENTILADORES Figura 3.21: Diagrama de bloques del los recursos de proyecto. Memoria. Unidad de refrigeración local 60
72 En la Figura 3.21 se observa que el hardware DAQ se emplea para adquirir las temperaturas de los diez termopares instalados en el prototipo URL y para adquirir la tensión del pin P1-8 del servoamplificador proporcional a la corriente de salida del mismo. Y también se usa para generar la salida del control, la tensión de mando. La placa de alimentación eléctrica de las células Peltier y los principales componentes que la forman se muestra en la Figura Puente rectificador Filtro C de 9 μf Reguladores de tensión Servoamplificador 12A8 40V ac y 20V ac 230V ac Alimentación red Fusible Alimentación al módulo Filtro L de 13.2 mh Salidas del servoamplificador P1-8 y P1-9 Tensión de mando P1-4 Figura 3.22: Placa de alimentación eléctrica de las células Peltier. Memoria. Unidad de refrigeración local 61
73 Alimentación de los ventiladores La segunda parte del circuito, cuyo esquema se muestra en la Figura 3.23, es la encargada de proporcionar 12 V a la salida. Para ello se toman 20 V de alterna, tensión proporcionada por el transformador, conectándolo a la entrada de dos MC7812C, que garantizan 12 V en su tensión de salida. Esta tensión se emplea para alimentar los ventiladores. En el desarrollo del proyecto se observó que la velocidad de los ventiladores influía en el rendimiento del equipo, por lo que uno de los ventiladores se alimentó a 6 V tomados de una fuente de alimentación de tensión continua. Ventiladores Figura 3.23: Esquema del circuito del alimentación los ventiladores Estudio de la corriente de la alimentación Como ya se ha mencionado en varias ocasiones la placa de alimentación eléctrica al módulo termoeléctrico se diseñó para otro prototipo que empleaba el efecto Peltier para climatizar un recinto Memoria. Unidad de refrigeración local 62
74 cerrado. Dicha placa también es adecuada para el prototipo URL pero hubo que estudiar la corriente de alimentación a las células y su rizado. Para el análisis de la corriente de alimentación se sustituyó el módulo termoeléctrico por una resistencia de 12 Ω para evitar los posibles daños a las células Peltier en caso de que se produjera un fallo. El valor resistivo del módulo se determinó realizando un ensayo en lazo abierto y midiendo la corriente y la tensión de alimentación del mismo (Tabla 3.5). Como el módulo termoeléctrico está formado por cuatro células Peltier conectadas en serie, la resistencia de cada célula y del módulo completo resultó: Vmódulo 1 Vmódulo R módulo = 12Ω célulapeltier = 3Ω I 4 I módulo R E. 3.1 módulo Corriente del Tensión del Resistencia P1-8 Ganancia módulo (A) módulo(v) (Ω) (V) (A/V) 1 12,1 3,03 0,49 2,04 1, ,68 2, ,9 2,99 0,88 2,27 2,5 30,3 3,03 1,12 2, ,1 3,09 1,36 2,22 Tabla 3.5: Medidas de alimentación al módulo termoeléctrico. En tabla anterior también se muestra la señal que suministra el servoamplificador en el pin P1-8 como una tensión y que es proporcional a la corriente multiplicándola por una ganancia de 2 A/V, según las especificaciones del servoamplificador. En la última columna de la tabla se Memoria. Unidad de refrigeración local 63
75 muestra esta ganancia calculada como el cociente entre un valor de aproximadamente 2,19 A/V. I módulo P1 8 obteniendo Para analizar la corriente de alimentación hay que estudiar la forma de onda de la señal que proporciona el servoamplificador. Esta tensión es una señal cuadrada, Figura Conectando la salida del amplificador directamente a la resistencia de 12 Ω, para una corriente de 2 A el rizado sin filtrar la señal es de Iˆ Δi 2 0,7 / = 100 = = 17,07%, donde I I 2,05 medio medio Î es la amplitud de la corriente. Este rizado es demasiado elevado para un buen rendimiento del módulo termoeléctrico que según la literatura existente sobre termoelectricidad debe ser inferior al 10%. Î (A) ΔI(A) CH2 : Corriente I (A) 0.7 A CH1 : Tensión Vs (V) Figura 3.24: Medidas sin filtro L para un corriente de 2A. Si a continuación se mide el rizado con el filtro L de 13,2 mh diseñado en el proyecto anterior, para una corriente de 2 A teóricamente debería de ser: 6 VS D T 26, Δ i = = = 2183, ma E L 13, 2 10 Memoria. Unidad de refrigeración local 64
76 Iˆ Δi/2 100 = 100 = 0,54% E. 3.3 I 2 medio Sin embargo, al realizar las medidas de corriente con una sonda amperimétrica y de tensión y visualizarlas en el osciloscopio, Figura 3.25, el rizado era de 34,24%. Las bobinas no filtraban la corriente que suministra el servo amplificador. CH2 : I (A) CH1 : Vs (V) 1.9 A 1.3 A Figura 3.25 Formas de onda para 2 A con un filtro L de 13.2 mh Analizando estos resultados se llegó a la conclusión de que las bobinas no eran adecuadas para realizar el filtrado, al tratarse de unas bobinas de choke con compensación de corriente y núcleo de ferrita. Una bobina de choke es una bobina diseñada para tener una reactancia muy grande a una frecuencia determinada. Se usa, bien para impedir el paso de una parte de un circuito a otra de la corriente alterna, al mismo tiempo que se deja pasar la corriente continua, o bien para impedir el paso de corriente en modo común, mientras deja pasar la corriente en modo diferencial. Memoria. Unidad de refrigeración local 65
77 Diseño del filtro L Una vez realizado el estudio de la corriente se decidió diseñar un nuevo filtro L. El diseño del filtro L se realizó para que el rizado de corriente de alimentación al módulo termoeléctrico fuera del 10%, para el caso más desfavorable, cuando el factor de servicio es de 0,5 y suponiendo una tensión de 50 V y una corriente de 5 A. El proceso de diseño comienza analizando las formas de onda de las señales implicadas, que son: Tensión que proporciona el servoamplificador. Esta tensión es una señal cuadrada de 50 V de voltaje máximo y 25 V de tensión media la frecuencia es de 42,7 khz, como se observa en la Figura 3.26 y el factor de servicio depende de la tensión de referencia que se introduce en el servoamplificador a través del pin P1-4. Vs 50 V L + 25 V DT 0 V A Vs I R I I=5 A T=23.98 μs 0A Δi - Figura 3.26: Esquema para el diseño del filtro L. Memoria. Unidad de refrigeración local 66
78 Corriente de salida del amplificador. La forma de onda de la corriente es la que se muestra en la figura anterior suponiendo que el módulo termoeléctrico se comporte como una carga resistiva. El valor pico-pico de esta señal es: V i = D T 6 10 = L L 4 S Δ E. 3.4 Como se ha especificado que el rizado debe ser menor del 10%, entonces el valor de la bobina resultante es: Δi 2 I = L 01, L 0, 6mH E. 3.5 A continuación, el siguiente paso fue consultar los catálogos de bobinas comerciales para elegir la más adecuada, cumpliéndose así los valores obtenidos en el diseño. Para ver los valores comerciales de las bobinas se acudió a Coilcraft, Inc. y a RS, las características de las bobinas que más se ajustaban a las especificaciones exigidas son: Inductancia (μh) Cantidad I RMS (A) Coilcraft, Inc Coilcraft, Inc ,2 RS ,6 Tabla 3.6: Posibles inductancias para el filtro L. Observando dichas características se decidió realizar el filtro con dos bobinas de 560 μh y 7 A de corriente RMS, el esquema del circuito finalmente montado es el que se muestra en la Figura Con esta Memoria. Unidad de refrigeración local 67
79 bobina el rizado de la corriente que debería resultar es de 5,35% y por tanto menor que el 10%, cumple con las especificaciones fijadas. L=560μH Módulo + termoeléctrico - I R Vs L=560μH Figura 3.27: Esquema y detalle del filtro L. Para confirmar que la corriente es filtrada correctamente por las bobinas de Coilcraft se realizaron las medidas que se observa en la tabla Tabla 3.7. Corriente del módulo (A) Tensión del módulo(v) Corriente pico-pico Δi (A) Rizado (%) P1-8 (V) Ganancia (A/V) 0,94 10,81 0,152 8,085 0,434 2,16 1,45 16,54 0,2 6,8 0,665 2,18 1, ,22 5,55 0,925 2,14 2,4 27,8 0,27 5,625 1,12 2,14 3,01 40,42 0,24 4 1,413 2,13 Tabla 3.7: Medidas de la corriente con el filtro diseñado. Memoria. Unidad de refrigeración local 68
80 En la tabla anterior se midió de nuevo la tensión del pin P1-8 y se calculó la relación entre la corriente en la resistencia de 12 Ω y la tensión de este pin, cuyo valor teórico es de 2 A/V y el valor real es de 2,15 A/V. Las formas de onda obtenidas para el caso de una corriente de 1,45 A son: CH2 : I (A) CH1 : Vs (V) 0.2 A Figura 3.28: Formas de onda obtenidas con el filtro L diseñado Por tanto se puede concluir que el filtro diseñado es adecuado para esta aplicación y cumple con todas las especificaciones Análisis de la señal P1-8 del servoamplificador Con el fin de poder utilizar la señal del pin P1-8, que proporciona el servoamplificador, como medida real de la corriente con la que se alimenta al módulo termoeléctrico se analizó si esta señal estaba retrasada con respecto a la corriente real y si el servoamplificador realizaba algún tipo de filtrado a la misma antes de proporcionarla por el pin P1-8. Memoria. Unidad de refrigeración local 69


81 Para realizar este estudio se visualizaron la señal del pin P1-8 y la corriente real en el osciloscopio utilizando un escalón como señal de disparo procedente de una fuente de tensión, lo que se observaba en el osciloscopio fue lo siguiente. CH1 : Corriente real 1.8 A 1.8 A 3.04 A CH2 : Señal P1-8 Figura 3.29 : Comparación de la corriente real y señal P1-8. En la Figura 3.29 se observa que la señal que proporciona el servoamplificador es más lenta que la corriente real: tiene una constante de tiempo de 3 ms mientras que la corriente real tiene una constante de tiempo de 0,5 ms. En la figura de la derecha el ruido que se puede observar tiene lugar a la frecuencia de conmutación del servoamplificador, 42,7 khz. Memoria. Unidad de refrigeración local 70

82 3.5 Puesta en marcha del URL Después del estudio de la alimentación del módulo termoeléctrico se realizó la puesta en marcha del prototipo. Para ello hubo que realizar el montaje de todos los componentes del sistema de medida, como se observa en la Figura Sistema de adquisición de datos PC Prototipo Figura 3.30: Sistema de medida Para comprobar el correcto funcionamiento de todo el equipo se llevo a cabo el ensayo en lazo abierto que se muestra en la Figura En este ensayo se aplicó una corriente de alimentación al módulo termoeléctrico de 1 a 3 A. En los primeros 8 minutos del ensayo, el prototipo tenía los ventiladores funcionando sin conectar la etapa de potencia. A continuación se conectó la placa de alimentación y se indicó en el mando una corriente de 0 A, en este tramo se observa que la corriente es negativa debido a que el servoamplificador tiene un offset de -0,086 A. Memoria. Unidad de refrigeración local 71
83 Temperatura (ºC) Tª chorro Tª amb Tª caliente Tª fría Respuesta de las temperaturas del módulo termoeléctrico Tiempo (min) 4 Corriente aplicada 3 Corriente (A) Tiempo (min) Figura 3.31: Ensayo en lazo abierto. A los 15 minutos se introduce el primer escalón dejando que el sistema alcance el régimen permanente durante 10 minutos, la temperatura desciende de 23,5 ºC a 19,6 ºC, siendo la temperatura ambiente de 23 ºC. El en paso de 1 a 2 A el decremento de la temperatura es de 1,8 ºC y de 2 a 3 A la temperatura del flujo de aire desciende 0,45 ºC. Memoria. Unidad de refrigeración local 72
84 Capítulo 4 IDENTIFICACIÓN DEL SISTEMA Para diseñar un control de la temperatura del flujo de aire es imprescindible obtener un buen modelo sobre el que trabajar, teniendo la seguridad de que este se ajuste a la realidad. Este capítulo trata sobre el modelado del sistema, que es una tarea de vital importancia para la obtención de un buen diseño. Para modelar el sistema se van a llevar a cabo dos metodologías. La primera se explica en el apartado Modelado basado en principios físicos en el cual en primer lugar se exponen las ecuaciones que permiten obtener la estructura del modelo para a continuación usando técnicas de mínimos cuadrados conseguir el valor de los parámetros que define dicha estructura. Finalmente en este apartado se valida el modelo obtenido comparándolo con ensayos reales. En la segunda metodología, Modelado por caja negra, el modelo que se obtiene corresponde a una función de transferencia entre la temperatura del flujo de aire y la salida del control. Se obtiene considerando el sistema como una caja con entradas y salidas, todo el proceso se explica en Modelo y obtención de los parámetros. En último lugar, al igual que en el modelado basado en principios físicos se valida el modelo comparándolo con ensayos. Para concluir este capítulo en Conclusión se expone cual de los dos modelos obtenidos es el que mejor refleja el comportamiento real del sistema URL y el que se va a emplear para diseñar el control de la temperatura del flujo de aire. Memoria. Identificación del sistema 73
85 4.1 Modelado basado en principios físicos Para diseñar un buen control de la temperatura del flujo de aire es necesario obtener un modelo del sistema. La identificación basada en principios físicos o también conocido modelado por caja gris se basa en principios termodinámicos y eléctricos para deducir la estructura del modelo y datos experimentales para obtener los parámetros del modelo. Esta metodología, implica un profundo conocimiento del proceso y de las leyes físicas y matemáticas que lo describen, así como una buena caracterización de los materiales que lo componen. En ocasiones el proceso de obtención de un modelo empleando este método es muy complejo, lo que lleva a realizar simplificaciones el sistema y a linealizarlo. La simplificación del sistema es una tarea crítica, usualmente las hipótesis que deben hacerse llevan a resultados no satisfactorios que solo son aplicables alrededor del punto de trabajo en el cual se ha linealizado el sistema Modelo del sistema El modelado de un sistema térmico es en principio complicado, ya que la temperatura no suele ser homogénea en los sistemas, lo que dará lugar a ecuaciones diferenciales y, por lo tanto, a modelos de parámetros distribuidos [12]. Se suele simplificar dividiendo el sistema en varias partes, como se ha realizado en este proyecto, o considerando una sola, suponiendo la temperatura homogénea. Así se obtienen ecuaciones diferenciales ordinarias, y por lo tanto modelos con parámetros concentrados. El calor puede fluir por conducción, convección y por radiación. El primer fenómeno es lineal, el flujo de calor es proporcional a la diferencia Memoria. Identificación del sistema 74
86 de temperatura. La convección es debida a un flujo de calor sobre la superficie del cuerpo de sustancias gaseosas o líquidas. La refrigeración de semiconductores en pequeñas potencias se realiza principalmente por convección La transferencia de calor por radiación sólo se aprecia si la temperatura del emisor es muy alta en comparación con la del receptor, en la mayor parte de los procesos térmicos en los sistemas de control de procesos no involucran transferencia de calor por radiación [13]. Un parámetro utilizado en conducción y, linealizado en convección y radicación es la resistencia térmica R (ºC/W o K/W), que es la relación entre el gradiente de temperaturas y el flujo de calor por unidad de tiempo evacuada a través de un conductor térmico. De la siguiente ecuación de deduce que cuanto mayor es la resistencia menor es el flujo de calor para igual salto térmico. p () t T = 1 ( t) T ( t) ΔT () t R 2 = R E. 4.1 Otro parámetro que interviene en el régimen transitorio de los sistemas térmicos es la capacidad térmica C (J/ºC o J/K). La capacidad térmica de un cuerpo es la cantidad de calor que hay que proporcionar para aumentar su temperatura un grado. T 1 = C t dt dt () t T( ) + p() t dt C = p() t 0 E Una vez conocidas los principios que rigen en un sistema térmico y teniendo en cuenta los efectos termoeléctricos que se dan debido a las células Peltier, se procede a la obtención de un modelo que refleje la dinámica del sistema. Hay que tener en cuenta que el modelado del sistema debe incluir los disipadores y los ventiladores que están situados en el prototipo. Otro importante detalle es que el prototipo URL está formado por cuatro módulos termoeléctricos, por lo que los coeficientes Memoria. Identificación del sistema 75
87 que se obtengan del modelado corresponden a la suma de las cuatro células Peltier. En este sistema hay tres tipos de transferencias de calor que se producen debido a los siguientes efectos: Efecto Seebeck La corriente aplicada al módulo termoeléctrico produce un flujo de calor que se transfiere de una superficie cerámica de la célula a otra. Q = S I T E. 4.3 Donde Q (W) es el calor, S (V/K) es el coeficiente de Seebeck del módulo termoeléctrico (cuatro veces el coeficiente de Seebeck de cada una de las células Peltier), I (A) es la corriente y T es la temperatura en Kelvin. Efecto Joule Cuando circula una corriente a través de un conductor, se produce un calentamiento del mismo. Este calentamiento no es más que disipación de energía en forma de calor, que se reparte en partes iguales entre la unión fría y la unión caliente: Q R 2 I 2 = E. 4.4 Donde R (Ω) es la resistencia eléctrica equivalente a las cuatro células Peltier. Efecto Fourier El calor transferido entre los dos lados, el caliente y el frío, causado por el gradiente de temperatura. Este gradiente de temperatura es provocado por la aplicación de corriente a las células. Memoria. Identificación del sistema 76
88 Q T caliente R T P fría = E. 4.5 Donde T caliente y T fría son las temperaturas en Kelvin de los lados caliente y frío respectivamente, y R P (K/W) es la resistencia térmica de la célula Peltier. La cantidad total de calor que hay que disipar en el lado caliente y el calor que extraído del lado frío se obtiene combinando las ecuaciones E. 4.3, E. 4.4 y E Q caliente R T T 2 caliente fría = S I Tcaliente I E RP Q fría = S I T fría + R I 2 2 T caliente R T P fría E. 4.7 La potencia eléctrica que consume el equipo es: 2 ( T T ) + R I P = V I = Q Q = S I E. 4.8 caliente fría caliente fría V ( T T ) + R I = S E. 4.9 caliente fría Por lo tanto, la resistencia equivalente del dispositivo no es lineal y depende del gradiente de temperatura. Hay que tener en cuenta la capacidad energética de los disipadores, asumiendo que cada disipador es isotérmico se puede considerar que son elementos puramente capacitivos. Tcaliente Tamb Rcaliente = E Q 1 + R C s caliente caliente caliente Tamb Tfría Rfría = E Q 1 + R C s fría fría fría Memoria. Identificación del sistema 77
89 Donde T amb (K) es la temperatura ambiente, R caliente (K/W) y R fría (K/W) es la resistencia térmica entre el lado caliente y frío de la célula Peltier y el aire, C caliente y C fría es la capacidad térmica y s es la variable de Laplace empelada para expresar las ecuaciones en funciones de transferencia. Hay que destacar que la capacidad térmica depende del tamaño de los disipadores y que la resistencia térmica depende de: El contacto térmico entre la célula y el disipador. El modelo de disipador. La tensión con la que se alimenta a los ventiladores, es decir la velocidad a la que mueven el aire. A partir de las ecuaciones anteriores se construye el diagrama de bloques de la Figura 4.1. Este diagrama corresponde a la estructura del modelo en lazo abierto funcionando en modo refrigeración. El modo de funcionamiento del sistema hay que tenerlo en cuenta en el criterio de signos. El color rojo que se observa en el diagrama de bloques se refiere al lado caliente, el color azul al lado frío y el color verde corresponde con la variable de salida, es decir, la temperatura del flujo de aire. El signo cambia entre el lado caliente y el lado frío. Cuando el sistema funciona en modo refrigeración, como en este caso, el calor extraído de la fuente fría, debido al gradiente de temperatura con respecto al ambiente, es el flujo calor que enfría el flujo de aire de salida. La temperatura del flujo de aire y el calor extraído del lado frío del modulo termoeléctrico están relacionadas entre sí por medio de una ganancia R ch (K/W), la obtención de esta resistencia térmica y el resto de los parámetros se encuentra en el siguiente apartado. Memoria. Identificación del sistema 78
90 S: Coeficiente de Seebeck R: Resistencia eléctrica equivalente R P : Resistencia Peltier T a : Temperatura ambiente T c : Temperatura caliente T f : Temperatura fría T ch : Temperatura del flujo de aire C c - C f : Capacidad térmica del lado caliente/ frío R c - R f : Resistencia térmica entre el lado caliente/ frío y el aire R ch : Resistencia térmica del flujo de aire Figura 4.1: Diagrama de bloques del modelo. Memoria. Identificación del sistema 79
91 4.1.2 Obtención de los parámetros Los parámetros que intervienen en el modelo son constantes, ya que dependen de la forma constructiva del mismo. Es decir, la resistencia térmica se ve afectada por el disipador y el ventilador acoplado a él, análogamente las capacidades térmicas. Los valores de los diferentes parámetros se calculan a partir de ensayos reales. El ensayo realizado para la identificación de los parámetros se muestra en la Figura Tª chorro Tª ambiente Tª caliente Tª fría Ensayo en lazo abierto 50 Temperatuta (ºC) Tiempo (min) Figura 4.2: Respuesta del ensayo en lazo abierto. En la figura se observa la respuesta del ensayo cuando el equipo funciona en modo refrigeración. Se pueden distinguir en la gráfica la Memoria. Identificación del sistema 80
92 temperatura ambiente, la temperatura del lado caliente y frío del módulo termoeléctrico y la temperatura del flujo de aire de salida, que en la gráfica se denomina temperatura del chorro. La entrada es la corriente que se aplica al módulo termoeléctrico que aumenta consecutivamente de 1 a 4 A y a continuación disminuye a 1 A. En la primera mitad del ensayo se aplicó al ventilador de la cara fría una tensión de 6 V, al ventilador de la cara caliente una tensión de 12 V para disipar el calor y en la segunda mitad se aplicó un voltaje de 12 V a ambos ventiladores, para analizar las diferencias en el rendimiento del conjunto. En la primera mitad del ensayo el rendimiento del conjunto es mayor que en la segunda porque observa que la respuesta la temperatura del flujo de aire disminuye más respecto la temperatura ambiente. La razón de que se produzca esta mejora del rendimiento es que hay una menor tensión aplicada al ventilador del lado frío, por tanto un menor flujo de aire en movimiento que se traduce en una reducción de la temperatura de salida para una misma potencia de entrada. La cantidad total de calor es más o menos la misma en los dos casos, pero el usuario percibe un flujo de aire más frío. Los ensayos con los que se identificó el modelo usando el método basado en principios físicos fueron en lazo abierto, el diagrama de bloques correspondiente se puede observar en la Figura 4.3. PC+ Hardware DAQ Servoamplificador Prototipo URL Figura 4.3: Diagrama de bloques en lazo abierto. La identificación del sistema se ha llevado a cabo por medio de técnicas de mínimos cuadrados. En el proceso de identificación se ha separado el lado frío del lado caliente, como muestra el código de colores Memoria. Identificación del sistema 81
93 del diagrama de la Figura 4.1. En la identificación de cada parte por separado, al determinar el valor de los parámetros comunes como R P (resistencia térmica de la célula Peltier) no se han obtenido los mismos resultados. La potencia eléctrica consumida por los ventiladores que es transformada en potencia calorífica no se ha tenido en cuenta al obtener el modelo. En cambio, la temperatura ambiente si que ha sido incluida en la estructura del modelo ya que en los ensayos realizados se apreció un aumento de esta temperatura al aumentar la corriente de alimentación al módulo termoeléctrico. Teniendo en cuenta los aspectos anteriores se obtuvieron unos parámetros cuyos valores son: R S = 0,21 V/K R = 8 Ω R P = 0,5 ºC/W = R 0,2 ºC/W caliente fría = C C = 300 J/ºC caliente = fría La resistencia térmica R ch que permite obtener la temperatura que se desea controlar se obtiene aplicando la siguiente relación: R Tch Tamb T Tamb = = 0, 12 ºC/W E Q R ch ch = fría ( T fría Tamb ) fría Una vez obtenidos los parámetros se linealiza el modelo en torno a un punto de trabajo de 23 ºC de temperatura ambiente. Esta acción se realiza Memoria. Identificación del sistema 82
94 con la herramienta de Simulink linmod. En este caso, sólo tendremos como no linealidades el cuadrado de la corriente, y el producto de temperatura fría y caliente por el coeficiente de Seebeck. El resto de elementos son lineales, de modo que la herramienta linmod realizará una simplificación de las funciones entre corriente y temperatura del flujo de aire. El resultado de la linealización es la siguiente función de transferencia entre la temperatura del flujo de aire y la corriente. P () s 0108, ( s 0, 014) ( s + 0, 03) ( s + 0, 0166) De esta función de transferencia se deduce que: La ganancia estática es: P( 0 ) 3, 03 = E =. Hay dos constantes de tiempo, τ = s y τ = 60 24s, en la 1, 2, respuesta del sistema predominará la constante de tiempo más lenta τ 1, ya que es la mitad de la constante de tiempo τ Validación del modelo Para poder diseñar un control con el modelo obtenido en el apartado anterior previamente hay que analizar la validez del modelo, simulándolo en Simulink y comparando de respuesta de la simulación, obtenida con el diagrama de la Figura 4.4 y de un ensayo para una misma entrada. Figura 4.4: Diagrama de bloques usado en las simulaciones. Memoria. Identificación del sistema 83
95 Para realizar la validación se van a comparar las respuestas en lazo cerrado de simulaciones con ensayos para dos controles proporcionales cualquiera. Los controles con los que se va a realizar la comparación tienen una ganancia proporcional de 2 y 3. Las comparaciones de las respuestas se encuentran en la Figura 4.5. Para el control proporcional de ganancia K C =2 ambas respuestas son amortiguadas, sin embargo la respuesta obtenida mediante la simulación del modelo es mucho más rápida que la respuesta real. En el caso de la respuesta del control de ganancia 3 la respuesta del ensayo tiene un sobrepaso del 15% y es mucho más lenta que la respuesta de la simulación. A partir de estas comparaciones se puede concluir que el modelo obtenido a partir de los principios físicos no es válido para representar al sistema real. 0 Comparación del ensayo con la simulación para un control proporcional Kc=2 Temperatura (ºC) Respuesta del ensayo Respuesta de la simulación Tª referencia Tiempo (min) 0.2 Comparación del ensayo y del mando para un control proporcional Kc=3 0 Temperatura (ºC) Tiempo (min) Figura 4.5: Comparación de los ensayos y las simulaciones para un control proporcional. Memoria. Identificación del sistema 84
96 También hay que comparar la respuesta del mando entre el sistema real y el modelo. La gráfica de la parte superior de la Figura 4.6 corresponde a una simulación y un ensayo con el control proporcional K C =2, en ella se puede observar que el valor final e inicial de ambas respuestas coincide por lo que la ganancia estática que se ha obtenido en el modelo del sistema en correcta. También se puede concluir que el mando de la simulación es mucho más rápido que el del ensayo al igual que en la gráfica de la parte inferior donde la respuesta del ensayo presenta oscilaciones, además de estar saturado. 2 Comparación de la respuesta de los mando para un control con Kc=2 Mando de corriente (A) Respuesta del ensayo Respuesta de la simulación 0 Mando de corriente (A) Tiempo (min) Comparación de las respuestas de los mandos para Kc= Tiempo (min) Figura 4.6: Respuestas de los mandos para dos controles proporcionales. Por tanto el modelado basado en principios físicos no ha sido satisfactorio, las respuestas comparadas así lo demuestran. Las diferencias Memoria. Identificación del sistema 85
97 entre el sistema real y el modelo pueden ser debidas a factores no tenidos en cuenta durante el modelado o a una interpretación errónea de las potencias caloríficas que intervienen. Es necesario realizar un estudio más detallado del sistema para obtener un modelo que refleje el comportamiento del prototipo, este análisis es propuesto en el Capítulo 8 de Futuros desarrollos. Memoria. Identificación del sistema 86
98 4.2 Modelado por caja negra El modelado por caja negra parte del desconocimiento total del proceso. Este es visto como una caja negra, con entradas y salidas. Los modelos por caja negra se diseñan enteramente a partir de datos, sin tener en cuenta la interpretación de los parámetros que lo definen. La base del modelo se selecciona a partir de núcleos estimadores cuya estructura se conoce que es muy flexible. Los parámetros de estos modelos por lo general no tienen significado físico y se ajustan para reproducir los datos observados tan bien como sea posible Modelo y obtención de los parámetros Para obtener la función de transferencia del prototipo hay que comparar la salida que se obtiene simulando un modelo propuesto y la salida de un ensayo, aplicándoles la misma señal de entrada. El ensayo que se ha utilizado para obtener el modelo es un ensayo en lazo cerrado con un control proporcional de ganancia igual a 2. Para obtener un buen modelo que refleje el comportamiento real del sistema es recomendable que el ensayo presente una respuesta con oscilaciones, de esta forma el ensayo contiene una mayor información que permite obtener un modelo más cercano a la realidad. El diagrama de bloques en lazo cerrado del sistema es el que se muestra en la Figura 4.7, es igual que el diagrama de la Figura 4.3 pero cerrando el lazo a través de un bloque que realiza la medida de la temperatura de salida del flujo de aire lo que permite calcular el error y generar el mando necesario para alcanzar la temperatura deseada. Memoria. Identificación del sistema 87
99 T ref (t) - PC+ Hardware DAQ u(t) Servoamplificador d(t) i(t) - Prototipo URL T ch (t) Hardware DAQ Figura 4.7: Diagrama de bloques en lazo cerrado El ensayo realizado con una acción proporcional igual 2 no presentaba oscilaciones, se realizaron ensayos con ganancias mayores pero se obtenía el mismo resultado por lo que se decidió utilizar el ensayo con una ganancia de control igual a 2, la respuesta de dicho ensayo se presenta en la Figura 4.8. Ensayo en lazo cerrado con control P 35 Temperatura (ºC) Treferencia Tfría Tcaliente Tamb Tchorro Tiempo (min) Salida del control Imedida Tensión (V) Tiempo (min) Figura 4.8: Ensayo en lazo cerrado con control K C =2. Memoria. Identificación del sistema 88
100 Los escalones aplicados en el ensayo son unitarios de 21 a 20 y a 19 ºC, el modelo del prototipo URL se ha determinado con el primer escalón. Para obtener el modelo de la planta hay que proponer una estructura del mismo, en este caso no se parte del desconocimiento de la estructura del sistema, con el modelado basado en principios físicos se ha obtenido una estructura cuya función de transferencia presente en la ecuación E. 4.13, tiene dos polos y un cero, que cualitativamente da una visión del modelo que hay que proponer. El siguiente diagrama de bloques permite simular el modelo propuesto. La función de transferencia que se va a obtener es la función entre la temperatura del flujo de aire o temperatura del chorro y la referencia de corriente, es decir, la salida del control. Por tanto la función que resultante de este estudio incluye el actuador, el servoamplificador 12A8 de Advanced Motion Controls. Figura 4.9: Diagrama para simular el modelo. Donde en la función de transferencia del diagrama de la Figura 4.9: th(1) es la ganancia, th(2) y th(3) son las constantes de tiempo de los polos y th(4) es la constante de tiempo del cero. El modelo se obtiene ejecutando los programas prepara_datos_ajuste.m y ajuste.m que están en la Parte IV del Documento Memoria. Con los datos Memoria. Identificación del sistema 89
101 del ensayo y utilizando métodos matemáticos basados en optimización, se comienza a probar con diferentes modelos. Para cada modelo propuesto, se encuentran sus coeficientes th( ). Dicha labor se realiza comparando la salida que se obtiene simulando el modelo propuesto con el diagrama de la Figura 4.9 y la salida del proceso real, aplicando la misma señal de entrada. Para confirmar que la función de transferencia del modelo responde a esta estructura también se obtuvieron modelos de primer orden, de segundo orden y de tercer orden. El ajuste entre las simulaciones de los modelos y la respuesta de los ensayos se muestra a en la Figura En estas gráficas se observa que el sistema que más se parece al ensayo real es el de segundo orden con un cero. Por lo que a continuación se obtiene un modelo con esta estructura. 0.2 Ajuste con un sistema de priner orden 0.2 Ajuste con un sistema de segundo orden 0 0 Temepratura (ºC) Error Respuesta de la simulación Respuesta del ensayo Temperatura (ºC) Tiempo (s) Ajuste con un sistema de segundo orden con un cero Tiempo (s) Ajuste con un sistema de tercer orden Temperatura (ºC) Temperatura (ºC) Tiempo (min) Tiempo (s) Figura 4.10: Ajustes con diferentes sistemas. Memoria. Identificación del sistema 90
102 Para obtener el modelo de segundo orden con un cero se proponen los siguientes parámetros th= [ ], ejecutando el programa de optimización se obtiene: th= [-2,83 57,51 3,54-2,71]. La comparación del ensayo con la respuesta del modelo se muestra en la Figura Comparación del modelo y del ensayo 0 Respuesta del ensayo Respuesta del modelo Error -0.2 Temperatura (ºC) Tiempo (s) Figura 4.11: Ajuste del modelo de segundo orden con cero. La función de transferencia correspondiente a estos parámetros es: P () s 0, 037 ( s 0, 37) ( s + 0, 28) ( s + 0, 017) De esta función de transferencia se deduce que: La ganancia estática es: P( 0 ) 2, 83 = E =. Memoria. Identificación del sistema 91
103 Hay dos constantes de tiempo, τ = 57 51s y τ = 3 54 s, en la 1, 2, respuesta del sistema predominará la constante de tiempo más lenta τ 1, ya que es la mitad de la constante de tiempo τ Validación del modelo Para verificar la validez del modelo obtenido se comparar la respuesta del modelo con un ensayo en lazo cerrado para una ganancia de control proporcional de valor Comparación del ensayo con la simulación Respuesta del ensayo Respuesta de la simulación Temperatura de referencia -0.2 Temperatura (ºC) Tiempo (min) Figura 4.12: Comparación de las respuestas del ensayo y la simulación para un control K C =3. En la respuesta del ensayo y de la simulación se muestra en la Figura 4.12, cabe destacar que el modelo tiene una respuesta más rápida ante un Memoria. Identificación del sistema 92
104 escalón en la referencia de 1 ºC y más amortiguada que la respuesta del modelo real. Los índices más significativos de la respuesta se muestran en la Tabla 4.1. M p % t a (min) t p (min) t s (min) Ganancia estática Error Simulación 20,9 0,2 0,3 0,45 0,899 0,1 Ensayo 23,86 0,3 0,5 0,99 0,93 0,07 Tabla 4.1: Índices de la respuesta temporal del ensayo y de la simulación. La conclusión de la validación del modelo de segundo orden es que este modelo es válido para representar al sistema real y realizar diseños de controles. Esto se confirma observando la Figura 4.13, donde se puede observar que la rapidez de ambos sistemas es muy próxima Comparación del modelo y el ensayo para un control proporcional Kc=3 Respuesta del ensayo Respuesta de la simulación Mando (V) Tiempo (min) Figura 4.13: Comparación de la respuesta de los mandos. Memoria. Identificación del sistema 93
105 4.3 Conclusión La conclusión de la identificación del sistema es que el modelo que representa el equipo es un modelo de segundo orden con un cero. Tanto en el modelado basado en principios físicos como en el modelado por caja negra se ha obtenido la misma estructura. Esto lleva a concluir que el modelado basado en principios físicos no es del todo incorrecto pero es necesario profundizar más en su obtención. Se da como válido el modelo obtenido por caja negra. Con este sistema es con el que se va a diseñar un control de la temperatura del flujo del aire en el Capítulo 5. El modelo que aproxima el funcionamiento del prototipo URL entre la temperatura del flujo de aire y la referencia de corriente es el que tiene como función de transferencia: P () s 0, 037 ( s 0, 37) ( s + 0, 28) ( s + 0, 017) = E Memoria. Identificación del sistema 94
106 Capítulo 5 CONTROL DE LA TEMPERATURA En este capítulo se procede a diseñar un control a partir del modelo obtenido por el método de caja negra. El capítulo se divide en dos apartados. El primero de ellos es Diseño del control, este apartado tiene la finalidad de obtener los parámetros de un control de la temperatura del flujo de aire. En primer lugar se definen las especificaciones que debe cumplir el control y a continuación se diseñan varios controles PI. Para concluir dicho apartado se analiza que control de los diseñados es el que mejor se ajusta a las especificaciones definidas. En el segundo apartado, Implantación del control, se implanta el control diseñado en el apartado anterior. En esta sección se analiza la respuesta del control diseñado tanto experimentalmente como en simulación. En Respuesta del ensayo se analiza experimentalmente, se estudia el comportamiento del sistema en distintos puntos de operación y la simetría del mismo. En Comparación entre el ensayo y la simulación se compara la respuesta de la simulación con el ensayo realizado, de este apartado se puede concluir la validez del modelo utilizado para diseñar el control. Memoria. Control de la temperatura 95
107 5.1 Diseño del control El control que se va a diseñar en este apartado corresponde a un control PI, se prescinde de la acción diferencial por un aumento del ruido que podría ocasionar su implantación y porque la rapidez del sistema en los ensayos realizados no requiere de un aumento. El diseño se realiza a partir de la respuesta en frecuencia del modelo obtenido y expuesto en el apartado 4.3. Los parámetros del control calculados aplicando las fórmulas clásicas se han modificado para alcanzar la respuesta más adecuada para este sistema. El diseño del control comienza definiendo las especificaciones del mismo que son las siguientes: Se desea una respuesta con error nulo a la referencia, por este motivo se requiere de acción integral que anule el error. La rapidez del sistema observada en los ensayos en lazo abierto es correcta, por lo que se decide prescindir de acción diferencial para eliminar la amplificación del ruido. El control PI diseñado será el más rápido posible. La respuesta obtenida no debe contener un sobrepaso excesivo por lo que el margen de fase debe ser mayor que 50º. Teniendo en cuenta estas especificaciones el control diseñado debe de cumplir: Error ω 0 (rad/s) Ф m φ c 0 >0,0458 > 50º -10º Tabla 5.1: Especificaciones del control PI. Memoria. Control de la temperatura 96
108 En la tabla anterior se ha especificado un error de seguimiento nulo, una frecuencia de cruce mayor que 0,0458 rad/s, que es la frecuencia de cruce del modelo del sistema a controlar y un margen de fase mayor que 50º con el objetivo de que el sobrepaso de la respuesta no supere el 20%. También se ha especificado una fase del control de -10º, este valor se ha modificado en el diseño finalmente implantado para mejorar la rapidez de la respuesta. La función de transferencia del modelo es: P () s 0, 037 ( s 0, 37) ( s + 0, 28) ( s + 0, 017) = E. 5.1 La función de transferencia del control PI a diseñar se muestra en la siguiente ecuación, donde se presenta la configuración serie y la paralelo respectivamente. El valor de los parámetros del control en ambas configuraciones coincide, es decir, K P = K c y I = Ti. 1+ I s 1 () C s = K = K P c 1+ I s Ti s E. 5.2 Para las cumplir las especificaciones anteriores se han realizado varios diseños implantando aquel que se ajuste más a la respuesta deseada. Los parámetros del control se han calculado ejecutando un programa realizado en Matlab. Los controles diseñados se muestran en la Tabla 5.2. Diseño Φ m A m (db) ϕ PI ω 0 (rad/s) I(s) Kp Ki I_52 75,6º 20,7-32,3º 0,03 52,65 0,69 0,013 I_30 56,3º 15,9-28,6º 0,06 30,49 1,13 0,037 I_10 8,46º 2,88-6,8º 0,84 9,9 3,34 0,34 Tabla 5.2: Parámetros de los controles PI. Memoria. Control de la temperatura 97
109 En la Figura 5.1 se puede observar el diagrama de Black del lazo abierto G( s) = C( s) P( s) de cada uno de los controles diseñados. A primera vista los controles más apropiados para el control de la temperatura del flujo de aire serían el I_30 y el I_52. Nichols Chart Open-Loop Gain (db) 20 0 I 10 I 30 I 52 P Open-Loop Phase (deg) Figura 5.1. Diagrama de Black de G(s). Para confirmar que las respuestas de los controles I_52 y I_30 son las que más se ajustan a las especificaciones, se presenta una tabla con los índices más significativos de las respuestas temporales de la Figura 5.2. M p % t a (min) t p (min) t s (min) Error I_ ,7 0 I_ ,5 0,8 1,37 0 I_ ,5 0,85 3,5 0 Tabla 5.3: Índices de la respuesta en lazo cerrado. Memoria. Control de la temperatura 98
110 Respuesta de simulaciones para distintos controles PI I 30 I 52 I 10 Tª referencia Temperatura (ºC) Tiempo (min) Figura 5.2: Respuesta temporal en lazo cerrado. En la respuesta temporal de la temperatura del flujo de aire se observa que todos los controles diseñados tienen un error nulo a la referencia. Se puede descartar el diseño I_10 ya que es muy poco amortiguado y por tanto no cumple con las especificaciones del control. La respuesta del control I_30 tiene un sobrepaso del 13% y la obtenida con el control I_52 es una respuesta amortiguada. En cuanto a la rapidez es similar en las respuestas de estos últimos controles. Los diseños I_52 y I_30 cumplen las especificaciones por lo que ambos son adecuados para el control de la temperatura del prototipo URL. Finalmente se va a implantar el diseño I_30 por tener una respuesta algo más rápida. Memoria. Control de la temperatura 99
111 5.2 Implantación del control En este apartado se realiza un análisis de la respuesta obtenida al implantar el control diseñado. La respuesta en frecuencia de la función de transferencia de lazo abierto y cerrado y la respuesta temporal del lazo cerrado, así como los índices más característicos se muestran en la Figura 5.3 y en la Figura Diagrama de Black Magnitude (db) URL, P Lazo abierto, G Phase 10 0 Diagrama de Bode F(s)lazo cerrado Magnitude (db) Frequency (rad/s) Figura 5.3: Respuesta en frecuencia del lazo abierto y del lazo cerrado. 0.2 Respuesta temporal del lazo cerrado Temperatura (ºC) ta=30s -1 ts=81.9 s tp=48.55 s Tiempo (s) Figura 5.4: Respuesta temporal del lazo cerrado con el control I_30. Memoria. Control de la temperatura 100
112 5.2.1 Respuesta del ensayo La respuesta obtenida al implantar el control diseñador se presenta en las siguientes figuras Tª controlada Tª ambiente Tª caliente Tª fría Tª referencia 30 Temperatura (ºC) Tiempo (min) Figura 5.5: Respuesta del ensayo en lazo cerrado. En la Figura 5.5 se puede observar la respuesta de las temperaturas medidas en el prototipo URL. La temperatura del flujo de aire es la denominada en la gráfica como Tª controlada, señal de color azul. La temperatura de referencia disminuye de 22 ºC a 21, 20, 19 y 18 ºC para luego volver a los 22 ºC incrementándose de grado en grado. Se puede observa que la temperatura del flujo de aire sigue a la consigna con rapidez y precisión, con un tiempo de establecimiento de alrededor de 1 a 2 minutos. Este ensayo demuestra la fiabilidad del prototipo y la robustez Memoria. Control de la temperatura 101
113 del control diseñado, ya que la temperatura del flujo de aire que se dirigiría hacia el usuario tiene una diferencia de 5 ºC respecto la temperatura ambiente. También hay que analizar la respuesta del mando. En la Figura 5.6 se representa dicha respuesta, en ella se pueden observar dos señales. Una de ellas se denomina Salida del control y corresponde con la señal de salida del control que en ningún momento del ensayo satura (el rango para que no sature está fijado en 0-3 V), físicamente es la tensión de mando que sale del hardware de adquisición de National Instruments y se dirige al servoamplificador 12A8. La otra señal que se muestra en la Figura 5.6 es la denominada Mando, que es una tensión proporcional a la corriente que suministra el servoamplificador para alimentar al módulo termoeléctrico. Esta última señal es adquirida del pin P1-8 del servoamplificador a través del hardware de adquisición de datos. Respuesta de los mandos 2.5 Salida del control Mando 2 Tensión (V) Tiempo (min) Figura 5.6: Respuesta del mando en un ensayo en lazo cerrado. Memoria. Control de la temperatura 102
114 De la respuesta del ensayo presente en la Figura 5.5 se puede estudiar el comportamiento del sistema en distintos puntos de operación y la simetría del mismo. En primer lugar se va a estudiar el comportamiento del sistema en los distintos puntos de operación. Para ello se representa en la Figura 5.7 la temperatura del flujo de aire en cada de uno de los escalones dados. Respuesta de Tª chorro para un escalón de 22 a 21 ºC 0 Respuesta de Tª chorro para un escalón de 21 a 20ºC 0 Temperatura (ºC) Tiempo (min) Temperatura (ºC) Tiempo (min) Respuesta de Tª chorro para un escalón de 20 a 19 ºC 0 Respuesta de Tª chorro para un escalón de 19 a 18 ºC 0 Temperatura (ºC) Tiempo (min) Temperatura (ºC) Tiempo (min) Figura 5.7: Análisis del ensayo en los distintos puntos de operación M p % t a (min) t p (min) t s (min) Error ºC 25 0,49 0,72 1, ºC 21 0,55 0,71 2, ºC 15 0,5 0, ºC 14 0,65 0,81 1,6 0 Tabla 5.4: Índices temporales para los escalones de bajada. Memoria. Control de la temperatura 103
115 A partir de la Figura 5.7 y de la Tabla 5.4 se puede concluir que a medida que la temperatura disminuye la respuesta de la temperatura del chorro o del flujo de aire tiene un menor sobrepaso. Para observar esto con mayor claridad se muestra en la Figura 5.8 las respuestas de la temperatura para los distintos puntos de operación en una misma gráfica. Esto puede ser debido a las no linealidades del sistema. Respuesta de la Tª chorro para distintos ptos de operación 0 22 a 21 ºC 21 a 20 ºC 20 a 19 ºC 19 a 18 ºC -0.2 Temperatura (ºC) Tiempo (s) Figura 5.8: Análisis de los distintos puntos de operación. Para verificar este comportamiento del sistema también se compara las respuestas de la temperatura controlada para distintos puntos de operación cuando la referencia se incrementa en un grado. Al aplicar escalones de subida se confirma la conclusión anterior, a medida que disminuye la temperatura la respuesta es más amortiguada. Esto se puede observar en la Tabla 5.5 y en la Figura 5.9. Memoria. Control de la temperatura 104
116 M p % t a (min) t p (min) t s (min) Error ºC 13 0,54 1 1, ºC 20 0,42 0,77 1, ºC 22 0,58 0,85 1, ºC 30 0,46 0,7 2 0 Tabla 5.5: Índices temporales para los escalones de subida. Respuesta de Tª chorro para una escalón de 21 a 22 ºC Respuesta de Tª chorro para una escalón de 20 a 21 ºC Temepratura (ºC) Tiempo (min) Respuesta de Tª chorro para una escalón de 19 a 20 ºC Temepratura (ºC) Tiempo (min) Respuesta de Tª chorro para una escalón de 18 a 19 ºC Temepratura (ºC) Tiempo (min) Temepratura (ºC) Tiempo (min) Figura 5.9: Análisis de los distintos puntos de operación cuando para escalones de subida. Del estudio realizado en los distintos puntos de operación se puede concluir que el control diseñado a partir del modelo obtenido por el método de la caja negra es válido. Esto se deduce observando los índices Memoria. Control de la temperatura 105
117 temporales más característicos de las respuestas en lo distintos tramos de subida y de bajada. Los índices son similares y la diferencias existentes, como en el caso del amortiguamiento de la respuesta, se deben a las no linealidades del sistema. A continuación se va a estudiar la simetría del sistema. Para ver si el sistema es simétrico en la Figura 5.10 se representa la respuesta al aplicar un escalón de 20 a 19 ºC y la respuesta invertida, es decir al aplicar en la referencia un escalón de 19 a 20 ºC. Observando la figura se deduce que el sistema es simétrico ya que tanto la rapidez como el amortiguamiento de las dos respuestas es la misma. Respuesta de Tª chorro a un escalón en la referencia 0 Respuesta a un escalón de 20 a 19 ºC Respuesta a un escalón de 19 a 20 ºC Temperatura (ºC) Tiempo (min) Figura 5.10: Análisis de la simetría del sistema. Memoria. Control de la temperatura 106
118 5.2.2 Comparación entre el ensayo y la simulación En el apartado anterior se ha analizado en detalle la respuesta del ensayo y se ha llegado a la conclusión de que el control PI implantado es adecuado para el control de la temperatura del flujo de aire. Para completar el análisis y confirmar la validez del control hay que comparar la respuesta del ensayo con la respuesta de una simulación, realizada mediante la herramienta Simuink de Matlab. En la Figura 5.11 se puede observar la comparación de la respuesta de la temperatura obtenida en el ensayo, de color azul, y la obtenida en una simulación, color rojo. A primera vista ambas respuesta son iguales, siguen a la referencia con precisión. Respuesta de las temperaturas para un control PI Temperatura (ºC) Respuesta del ensayo Respuesta de la simulación Tª referencia Tiempo (min) Figura 5.11: Comparación de las respuestas de las temperaturas del ensayo y la simulación Memoria. Control de la temperatura 107
119 También se compara en la Figura 5.12 la respuesta del mando, que se corresponde con la señal de salida del control. En verde se representa la respuesta de esta señal obtenida en la simulación cuyo valor en régimen permanente es al algo mayor que la respuesta del ensayo Respuestas del mando para un control PI Respuesta del ensayo Respuesta de la temperatura 2 Tensión (V) Tiempo (min) Figura 5.12: Comparación de las respuestas del mando. Para observar mejor las diferencias entre las respuesta del ensayo y de la simulación se van a representar de forma aislada las respuestas un escalón de subida y otro de bajada. En primer lugar se representa en la Figura 5.13 la respuesta de la temperatura controlada cuando en la referencia se aplica un escalón de 20 a 19 ºC. En la misma figura además se representa la comparación de las respuestas del mando para ese mismo tramo. Memoria. Control de la temperatura 108
120 Respuesta de la temperatura con un control PI Temperatura (ºC) Tensión (V) Respuesta del ensayo Respuesta de la simulación Tª referencia Tiempo (min) Respuestas del mando con un control PI Respuesta del ensayo Respuesta de la simulación Tiempo (min) Figura 5.13: Comparación de las respuestas entre el ensayo y la simulación para un escalón de bajada. En la figura se observa que la respuesta del ensayo y la simulación son muy parecidas, esto se confirma en la Tabla 5.6. Las diferencias que se perciben son causadas por la presencia de ruido en la medida de las señales. A pesar de este factor se puede concluir que dada la igualdad en las respuestas el modelo obtenido en el apartado 4.2 representa muy bien al sistema controlado. M p % t a (min) t p (min) t s (min) Error Simulación 13 0,5 0,8 1,37 0 Ensayo 15 0,5 0, Tabla 5.6: Índices temporales de las respuestas. Memoria. Control de la temperatura 109
121 Cuando en la referencia se aplica un escalón de 20 a 21 ºC las respuestas de la temperatura del flujo de aire y del mando en el ensayo y en la simulación son las señales que se muestran en la Figura En este caso la respuesta del ensayo y la simulación tienen más diferencias debido a que el modelo se ha obtenido cuando el sistema funciona en modo frío y en esta respuesta el sistema funciona en modo caliente. Temperatura (ºC) Tensión (V) Respuesta del ensayo 0.2 Respuesta de la simulación Tª referencia Tiempo (min) Respuestas del mando para un control PI Respuestas de la temperatuta de salida para un control PI Respuesta del ensayo Respuesta de la simulación Tiempo (min) Figura 5.14: Comparación de las respuestas entre el ensayo y la simulación para un escalón de subida. M p % t a (min) t p (min) t s (min) Error Simulación 13,7 0,7 0,9 1,56 0 Ensayo 22 0,58 0,85 1,8 0 Tabla 5.7: Índices temporales de las respuestas. Memoria. Control de la temperatura 110
122 Otra forma de validar el modelo y el control PI diseñado es aplicar en la temperatura de referencia un escalón mayor que 1 ºC. En este caso se ha aplicado un escalón negativo de 3 ºC, de 22 a 19 ºC, en la Figura 5.15 se muestra la respuesta normalizada a este escalón. Temperatura (ºC) Tensión Respuesta de las temperaturas con un control PI 0 Respuesta del ensayo -0.5 Respuesta de la simulación Tª referencia Tiempo (min) Respuesta de los mandos con un control PI 2.5 Respuesta del ensayo 2 Respuesta de la simulación Tiempo (min) Figura 5.15: Comparación de las respuestas entre el ensayo y la simulación para un escalón de bajada de 3 ºC en la referencia. M p % t a (min) t p (min) t s (min) Error Simulación 13,7 0,5 0, Ensayo 22,9 0,88 1,28 2,76 0 Tabla 5.8: Índices temporales de las respuestas. Memoria. Control de la temperatura 111
123 En la gráfica anterior y en la Tabla 5.8 se pueden observar las diferencias existentes entre la respuesta de la simulación y la respuesta del ensayo. La respuesta de la simulación es más rápida y más amortiguada que la respuesta del ensayo. Ambas respuestas presentan error nulo al escalón. Las diferencias existentes al aplicar un escalón mayor que un grado hacen concluir que el modelo obtenido no se ajusta totalmente al comportamiento real del sistema, pero es adecuado para ver las características del mismo y establecer que controles son los más apropiados para el control de la temperatura del flujo de aire que proporciona el prototipo URL. Memoria. Control de la temperatura 112
124 Capítulo 6 RESULTADOS En este capítulo se exponen los resultados a los que se han llegado en el desarrollo de este proyecto. En los capítulos anteriores ya se han mencionado algunos de ellos, pero para concentrar los resultados obtenidos y facilitar la compresión del proyecto en este capítulo se desarrollan resumidamente. El capítulo se divide en tres apartados. En Alimentación del módulo termoeléctrico se exponen los resultados a los que se han llegado en la primera etapa del proyecto, que ha consistido en analizar si el hardware del proyecto desarrollado en cursos anteriores es adecuado para el prototipo URL y estudiar el filtrado necesario de la señal de potencia, que afecta al rendimiento de las células. En el segundo apartado, Modelo del sistema, se describen los resultados obtenidos en la identificación del sistema, empleando ecuaciones basadas en principios físicos y el modelado por caja negra. Finalmente el capítulo termina con el apartado Control de la temperatura. En este apartado se explican las especificaciones que debe cumplir el control PI y la obtención de los parámetros del mismo. También se muestran la respuesta de los ensayos realizados y la comparación con la simulación del modelo. Memoria. Resultados 113
125 6.1 Alimentación del módulo termoeléctrico La placa de alimentación eléctrica al módulo termoeléctrico se diseñó para otro prototipo que empleaba el efecto Peltier para climatizar un recinto cerrado. Dicha placa también es adecuada para el prototipo URL pero hubo que estudiar la corriente de alimentación a las células y su rizado. En este estudio se midió un rizado del 34,24% por lo que se concluyó que era necesario diseñar un filtro inductivo para que el rizado no superase el 10%. El diseño realizado se muestra en la Figura 6.1, con este filtro el rizado de la corriente resultante es del 6%. L=560μH Módulo + termoeléctrico - I R Vs L=560μH Figura 6.1: Esquema y detalle del filtro L. Por tanto se puede concluir que el filtro diseñado es adecuado para esta aplicación y cumple con todas las especificaciones. El estudio de la alimentación al módulo termoeléctrico, todas las medidas y los cálculos realizados para determinar el valor de las bobinas está desarrollado en el apartado 3.4 llamado Alimentación. Memoria. Resultados 114
126 6.2 Modelo del sistema Para realizar la identificación del sistema se han llevado a cabo dos metodologías, una de ellas basada en principios físicos y la otra mediante el modelado por caja negra. Todo el desarrollo para llegar a los resultados expuestos a continuación se encuentra en el Capítulo 4 llamado Identificación del sistema Modelado basado en principios físicos Esta identificación está basada en principios termodinámicos y eléctricos y en datos experimentales para obtener la estructura y los parámetros del modelo. En el modelo tienen lugar tres tipo de transferencia de calor, que se deben a los efectos Seebeck, Joule y Fourier. Teniendo en cuenta estos efectos el modelo cumple las siguientes ecuaciones: Q caliente R T T 2 caliente fría = S I Tcaliente I E RP Q fría = S I T fría + R I 2 2 T caliente R T P fría E. 6.2 Tcaliente Tamb Rcaliente = E. 6.3 Q 1 + R C s caliente caliente caliente Tamb Tfría Rfría = E. 6.4 Q 1 + R C s fría fría fría A partir de las ecuaciones anteriores se obtiene un diagrama de bloques del modelo. El diagrama de bloques se divide en dos partes: el Memoria. Resultados 115
127 lado caliente del módulo termoeléctrico y el lado frío, como se muestra en la Figura 4.1. De tal forma que la identificación de los parámetros se realiza por separado y a partir de datos obtenidos en un ensayo realizado en lazo abierto se obtienen dichos parámetros. El parámetro común al lado caliente y frío del módulo (R P resistencia de la célula Peltier) obtenido en la identificación debe de coincidir. Al realizar la identificación este parámetro no coincidía por lo que se estimo un valor próximo. R S = 0,21 V/K R = 8 Ω R P = 0,5 ºC/W = R 0,2 ºC/W caliente fría = C C = 300 J/ºC caliente = fría La resistencia térmica R ch que permite obtener la temperatura que se desea controlar se obtiene aplicando la siguiente relación: R Tch Tamb T Tamb = = 0, 12 ºC/W E. 6.5 Q R ch ch = fría ( T fría Tamb ) fría Una vez obtenidos los parámetros se linealiza el modelo en torno a un punto de trabajo de 23 ºC de temperatura ambiente. El resultado de la linealización es la siguiente función de transferencia entre la temperatura del flujo de aire y la corriente. P () s 0108, ( s 0, 014) ( s + 0, 03) ( s + 0, 0166) = E. 6.6 El siguiente paso es analizar la validez del modelo, simulándolo en Simulink y comparando de respuesta de la simulación. Para realizar la Memoria. Resultados 116
128 validación se van a comparar las respuestas en lazo cerrado de simulaciones con ensayos para dos controles proporcionales. Los controles con los que se va a realizar la comparación tienen una ganancia proporcional de 2 y 3. 0 Comparación del ensayo con la simulación para un control proporcional Kc=2 Temperatura (ºC) Respuesta del ensayo Respuesta de la simulación Tª referencia Tiempo (min) 0.2 Comparación del ensayo y del mando para un control proporcional Kc=3 0 Temperatura (ºC) Tiempo (min) Figura 6.2: Comparación de los ensayos y las simulaciones para un control proporcional. Las comparaciones de las respuestas se encuentran en la Figura 6.2. Para el control proporcional de ganancia K C =2 ambas respuestas tiene un sobrepaso similar, sin embargo la respuesta obtenida mediante la simulación del modelo es mucho más rápida que la respuesta real. En el caso de la respuesta del control de ganancia 3 la respuesta del ensayo tiene un sobrepaso mayor que la respuesta de la simulación y es mucho más lenta. A partir de estas comparaciones se puede concluir que el modelo obtenido a partir de los principios físicos no es válido para representar al sistema real. Memoria. Resultados 117
129 6.2.2 Modelado por caja negra Los modelos por caja negra se diseñan enteramente a partir de datos, sin tener en cuenta la interpretación de los parámetros que lo definen. Para diseñar el modelo que refleje el comportamiento del prototipo URL hay que comparar la salida que se obtiene simulando un modelo propuesto y la salida de un ensayo, aplicándoles la misma señal de entrada. El ensayo que se ha utilizado para obtener el modelo es un ensayo en lazo cerrado con un control proporcional de ganancia igual a 2. Hay que proponer una estructura del modelo para poder simularlo y comparar la respuesta con un ensayo real. Se han propuesto modelos de primer orden, de segundo orden y de tercer orden. 0.2 Ajuste con un sistema de priner orden 0.2 Ajuste con un sistema de segundo orden 0 0 Temepratura (ºC) Error Respuesta de la simulación Respuesta del ensayo Temperatura (ºC) Tiempo (s) Ajuste con un sistema de segundo orden con un cero Tiempo (s) Ajuste con un sistema de tercer orden Temperatura (ºC) Temperatura (ºC) Tiempo (min) Tiempo (s) Figura 6.3: Ajustes con sistemas de primer y segundo orden. Memoria. Resultados 118
130 El ajuste entre las simulaciones de los modelos y la respuesta de los ensayos se muestra a en la Figura 6.3. En estas gráficas se observa que el sistema que más se parece al ensayo real es el de segundo orden con un cero. El modelo que aproxima el funcionamiento del prototipo URL entre la temperatura del flujo de aire y la referencia de corriente es el que tiene como función de transferencia un modelo de segundo orden con un cero. P () s 0, 037 ( s 0, 37) ( s + 0, 28) ( s + 0, 017) = E. 6.7 Para verificar la validez del modelo obtenido hay que comparar la respuesta del modelo con un ensayo en lazo cerrado para una ganancia de control proporcional de valor 3. Dicha comparación se observa en la Figura Comparación del ensayo con la simulación Respuesta del ensayo Respuesta de la simulación Temperatura de referencia -0.2 Temperatura (ºC) Tiempo (min) Figura 6.4: Comparación del ensayo y la simulación del modelo obtenido por caja negra. Memoria. Resultados 119
131 A partir de estos resultados se da como válido el modelo obtenido por caja negra y realizado en este apartado. Con este sistema es con el que se va a diseñar un control de la temperatura del flujo del aire. Memoria. Resultados 120
132 6.3 Control de la temperatura Se ha diseñado un control PI a partir del modelo obtenido mediante la identificación por caja negra que tuviese un buen funcionamiento en el rango de temperaturas que el sistema puede alcanzar. El diseño del control comienza definiendo las especificaciones del mismo que son las siguientes: Se desea una respuesta con error nulo a la referencia, por este motivo se requiere de acción integral que anule el error. La rapidez del sistema observada en los ensayos en lazo abierto es correcta, por lo que se decide prescindir de acción diferencial para eliminar la amplificación del ruido. El control PI diseñado será el más rápido posible. La respuesta obtenida no debe contener un sobrepaso excesivo por lo que el margen de fase debe ser mayor que 50º. Aplicando las fórmulas clásicas de control y tratando de cumplir las especificaciones citadas se obtiene la siguiente función de transferencia del control. En la ecuación E. 6.8 la acción integral I se encuentra en segundos. C () s = K P 1+ I s I s 1+ 30, 49 s = 113, 30, 49 s E. 6.8 La respuesta obtenida al implantar el control PI se presenta en la Figura 6.5. Se puede observa que la temperatura del flujo de aire sigue a la consigna con rapidez y precisión, con un tiempo de establecimiento de alrededor de 1 a 2 minutos. Este ensayo demuestra la fiabilidad del prototipo y la robustez del control diseñado, ya que la temperatura del flujo de aire que se dirigiría hacia el usuario tiene una diferencia de 5 ºC respecto la temperatura ambiente. Memoria. Resultados 121
133 40 35 Tª caliente Respuesta de las temperaturas Temperatura (ºC) Tª amb Tª controlada Tª referencia Tª fría Tiempo (min) Respuesta de los mandos Tensión (V) Salida del control Mando Tiempo (min) Figura 6.5: Respuesta del ensayo en lazo cerrado. En la Figura 6.5 también se representa la respuesta del mando. En la figura se pueden observar dos señales. Una de ellas se denomina Salida del control que corresponde con la señal de salida del control que en ningún momento del ensayo satura (el rango para que no sature es de 0-3 V). La otra señal que se muestra es la denominada Mando, que es una tensión proporcional a la corriente que suministra el servoamplificador para alimentar al módulo termoeléctrico. Para validar el control diseñado y el modelo a partir del cual se ha obtenido el control PI hay que compara la respuesta del ensayo con una simulación. Esta comparación se muestra en la Figura 6.6. Memoria. Resultados 122
134 Respuesta de la temperatura con un control PI Temperatura (ºC) Tensión (V) Respuesta del ensayo Respuesta de la simulación Tª referencia Tiempo (min) Respuestas del mando con un control PI Respuesta del ensayo Respuesta de la simulación Tiempo (min) Figura 6.6: Comparación entre el ensayo y la simulación para un escalón de bajada en la referencia. En la figura se observa que la respuesta del ensayo y la simulación son muy parecidas. Dada la igualdad en las respuestas el modelo y el control son válidos para este sistema. M p % t a (min) t p (min) t s (min) Error Simulación 13 0,5 0,8 1,37 0 Ensayo 15 0,5 0, Tabla 6.1: Índices temporales de las respuestas. Todo el desarrollo para llegar a los resultados expuestos se encuentra en el Capítulo 5 llamado Control de la temperatura. Memoria. Resultados 123
135 Capítulo 7 CONCLUSIONES En el presente proyecto se ha diseñado un control de la temperatura del flujo de aire del prototipo URL, que consiste en la regulación de la alimentación del módulo termoeléctrico para que se genere una sensación térmica fijada por el usuario. Si se tienen en cuenta los objetivos que se han propuesto al comienzo del proyecto, apartado 1.3, se puede afirmar que se han cumplido todos. A continuación se va a revisar cada uno de los objetivos propuestos justificando su cumplimiento. Diseño de la alimentación al módulo termoeléctrico. En las medidas realizadas y expuestas en el apartado Estudio de la corriente de la alimentación del Capítulo 3 queda demostrado que para un correcto funcionamiento de la unidad era necesario diseñar un filtro inductivo para eliminar el excesivo rizado de la corriente de alimentación. En este proyecto se ha diseñado un filtro para que el rizado sea como mucho de un 10%. Las medidas tomadas después de la incorporación de dicho filtro llevan a la conclusión de que el diseño de la alimentación del módulo termoeléctrico es correcto. Identificación del sistema. Para cumplir el objetivo final del proyecto, era necesario previamente obtener un modelo del sistema. El modelado del sistema se ha llevado a cabo por dos métodos. En el primero de ellos, basado en principios físicos, se obtuvo un modelo que no reflejaba el comportamiento real. Con el segundo método, Memoria. Conclusiones 124
136 modelado por caja negra, se determinó un modelo que si refleja realidad del sistema a controlar. Control de la temperatura del flujo de aire en la unidad de refrigeración local (URL). En los objetivos iniciales se requería diseñar un control de la temperatura del flujo de aire, determinar la configuración de la estructura de control y el tipo de regulador así como sus parámetros. En los ensayos realizados y expuestos en el Capítulo 5 Control de la temperatura demuestran el cumplimiento de este objetivo. Este proyecto ha permitido implantar la tecnología Peltier en climatización. Comparando esta con otras tecnologías de refrigeración, principalmente la bomba de calor por compresión, la conclusión es que la tecnología Peltier puede únicamente ser competitiva en aplicaciones que por sus condiciones desaconsejen o impidan el uso de la bomba de calor por compresión. Estas condiciones son ausencia de ruido y vibraciones, imposibilidad de acceso la red eléctrica. Memoria. Conclusiones 125
137 Capítulo 8 FUTUROS DESARROLLOS En este capítulo se van a exponer las mejoras que se pueden aplicar al proyecto. Estas mejoras están destinadas por un lado a completar el proyecto en curso y por otro a proporcionar a los futuros proyectos, que sigan desarrollando la tecnología Peltier, conocimientos que permitan alcanzar nuevos avances en esta tecnología. I. Realización de una nueva placa. El motivo de soldar una nueva placa, para la alimentación del módulo termoeléctrico, es que la placa actual incluye una etapa de acondicionamiento de la señal para la medida de las temperaturas diseñada en el proyecto del curso [4]. Esta etapa de acondicionamiento de la señal actualmente está en desuso ya que se dispone del hardware de adquisición de datos de National Instruments que realiza las medidas de las temperaturas y la generación de la señal de mando para realizar el control de la temperatura del flujo de aire. En este futuro desarrollo también se debe incluir una salida de 6 y 12 V de tensión continua para alimentar a los ventiladores, asegurándose de que se proporcione la potencia necesaria a los mismos. Aunque la placa en uso disponga de una salida con 12 V de continua no se ha utilizado para la alimentación a los ventiladores, se ha empleado dos fuentes de tensión continua una a 6 V y otra a 12 V. II. Limitación de la corriente del servoamplificador. El servoamplificador 12A8, cuya función es la de proporciona al módulo termoeléctrico la corriente de alimentación según el valor de Memoria. Futuros desarrollos 126
138 una tensión de mando, dispone de la posibilidad de limitar la corriente continua de salida con un potenciómetro. Una de las mejoras que se pueden aplicar al proyecto es la del estudio de la limitación de esta corriente. III. Estudio de la velocidad de los ventiladores. En los ensayos realizados para la identificación del modelo, sección 4.1.2, se analizó superficialmente que velocidad era la óptima para el movimiento de los ventiladores. Para mejorar el rendimiento del sistema hay que realizar un estudio sobre cual debe ser la tensión de alimentación de los ventiladores, analizando el flujo de aire óptimo. IV. Repaso del modelado basado en principios físicos. El modelo obtenido a partir de los principios físicos que se dan lugar en el sistema no representa el comportamiento real del mismo. Por lo que una mejora que se puede aplicar al proyecto es la de optimizar el modelo obtenido, repasándolo e interpretando de forma adecuada la suma de flujos de calor y la intervención de la temperatura ambiente. Memoria. Futuros desarrollos 127
139 BIBLIOGRAFÍA [1] Te Technology, Inc. Thermoelectric Temperature Controller Sensor Attachmentwith Notes on Thermocouples. November Fuente: attachment_with_notes_on_thermocouples.pdf [2] Delta Electronic, Inc. Fuente: [3] Palacios, R.; Arenas Alonso, A.; Vázquez, J.;Pagola de las Heras, F.L, Pecharromán, R.R. Caracterización experimental de un Parámetro Transparente Activo Termoeléctrico (PTA). Climamed Congrès Méditerranéen des Climaticiens. Lyon (France) November Fuente: [4] Padierna Díaz, A. Climatización mediante células Peltier Fuente: Biblioteca de ICAI. [5] Calvo Romero, D. Climatización mediante células Peltier Fuente: [6] Redondo, J.M., Noriega, G., Villasevil, F., López, A. El arte de refrigerar, introducción a la termoelectricidad Fuente: [7] Ferrotec. Thermoelectric Technical Reference-Introduccion to Thermoelectric Cooling. Fuente: [8] Villasevil, F. J. Desarrollo y caracterización de estructuras termoeléctricas constituidos con materiales y geometrías no estándar. Fuente: Universidad Politécnica de Catalunya. [9] Micropelt. Böttner, H. Nurnus, J., Braun, M., Wöllenstein, J., Volkert, F., Schubert, A. State Of The Art, Road Map and Applications. Fuente: Memoria. Bibliografía 128
140 [10] Marlow Industries, Inc. Thermoelectric Cooling Systems Design Guide Fuente: [11] National Instruments. Introduction to Data Acquisition. Fuente: [12] Zazo Cabello, A., Pagola de las Heras, F.L. Introducción a los Sistemas Dinámicos. Octubre Universidad Pontificia Comillas, ICAI. Departamento de electrónica y automática. [13] Ogata, Katsuhiko. Ingeniería de Control Moderna Ed. Prentice Hall. Memoria. Bibliografía 129
141 Parte II ESTUDIO ECONÓMICO Estudio económico 130
142 1 Estudio económico El objetivo final del proyecto es controlar la temperatura del flujo de aire que proporciona el prototipo URL. El prototipo está destinado a refrigeración local en ambiente no climatizado o como complemento para conseguir condiciones de confort térmico para una persona a través de un chorro de aire frío dirigido hacia ella, en un ambiente climatizado. Esta solución es una alternativa en aquellas aplicaciones que por sus características impidan el uso de la bomba de calor por compresión como pueden ser la ausencia de ruido y vibraciones, la imposibilidad de acceso a la red eléctrica, el requerimiento de bajas potencias frigoríficas o la posibilidad de traslado de la unidad. En este sentido la viabilidad del proyecto está justificada, esta aplicación de la termoelectricidad desarrollada en este proyecto es una opción disponible a los métodos más frecuentes de refrigeración que son la compresión de vapor, la absorción y la adsorción y los ciclos de gas. Hay que mencionar que los sistemas de refrigeración termoeléctricos son por lo general mucho menos eficientes que los sistemas por compresión, por lo que la eficiencia energética de la unidad no es elevada. Ésta se debe a la elevada diferencia de temperaturas entre la cara fría y la caliente, y a los ventiladores y disipadores, que son un elemento crítico del sistema. A pesar de esta desventaja la potencia consumida por el equipo es baja y el coste es también bajo. Estudio económico 131
143 Parte III MANUAL DEL USUARIO Manual del usuario 132
144 1 Introducción Este manual del usuario está destinado para dar a conocer al lector el software Labview usado en este proyecto y para aclarar las estructuras de los controles que dicho software contiene en sus librerías. En primer lugar se describe en que consiste el software Labview y como funciona. A continuación se detalla la estructura de los controles PID de la librería PID Control Toolkit perteneciente a Labview, empleados para realizar los ensayos con el prototipo URL. Finalmente se explican los programas usados para realizar los ensayos en lazo abierto y lazo cerrado del sistema a controlar. Manual del usuario 133
145 2 Labview Labview (Laboratory Virtual Instrument Engineering Workbench) es un lenguaje de programación gráfico para el diseño de sistemas de adquisición de datos, instrumentación y control. Es un lenguaje de programación de propósito general que también incluye librerías de funciones y herramientas de desarrollo diseñadas específicamente para la adquisición de datos, la instrumentación y el control. Labview está basado en una programación modular, lo que permite crear tareas a partir de módulos más sencillos. Además, estos módulos pueden ser usados en otras tareas. Los módulos o programas en Labview se llaman virtual instruments (VIs) porque su apariencia y funcionamiento es similar a un instrumento real. VI consiste en una interfaz de usuario interactivo, un diagrama de bloques que es el código fuente del programa y conectores. La interfaz de usuario interactivo se denomina panel frontal (frontal panel). Este puede contener botones, pulsadores, gráficas o indicadores. Los datos se introducen mediante el teclado y el ratón y se visualizan en el panel frontal. El diagrama de bloques (block diagram) contiene el código fuente gráfico. En este panel se relacionan los elementos utilizados en la interfaz mediante operaciones que determinan en sí como funciona el programa o el sistema, exactamente es la parte donde se realizan las especificaciones funcionales. Conectores. Identifica a cada VI, de manera que podemos utilizarlo dentro de otro VI. Un VI dentro de otro VI recibe el nombre de subvi. Se emplea para hacer llamadas a otros VIs. Manual del usuario 134
146 La programación gráfica se basa en la realización de operaciones mediante la asignación de iconos que representen los datos numéricos e iconos que representan los procedimientos que deben realizar los VIs. Con estos iconos y mediante una conexión simple como lo es una línea recta se enlazan para determinar una operación o una función. Al diseñar el programa de forma gráfica, se hace visible una programación orientada al flujo de datos, donde se tiene una interpretación de los datos también de forma gráfica, por ejemplo un dato booleano se caracteriza por ser una conexión verde, cada tipo de dato se identifica con un color diferente; también es necesario tener en cuenta que cuando se realiza una conexión a un VI esta conexión se identifica por un tipo de dato especifico, que debe coincidir con el tipo de dato de la entrada del VI permitiendo una concordancia en el flujo de datos. El flujo de datos va de izquierda a derecha en el panel de programación o diagrama de bloques y esta determinado por las operaciones o funciones que procesan los datos. Es fácil observar en el panel de programación como se computan los datos en cada parte del programa cuando se realiza una ejecución del programa paso a paso. En Labview las variables se representan mediante un figura tanto en el panel frontal como en el panel de programación, de esta forma se puede observar su respuesta en la interfaz del usuario. Manual del usuario 135
147 3 Estructura del control PID El control Proporcional-Integral-Derivativo (PID) es el algoritmo de control más usado en la industria. A menudo se emplea en procesos de control que incluyen sistemas térmicos, hidráulicos entre otros. En un control PID hay que especificar las variables procesadas y una consigna o referencia de la variable que se desea controlar. El control PID compara el valor de la referencia (SP setpoint) con el de la variable controlada (PV process variable) para obtener el error e. e= SP PV E. 3.1 Una vez obtenido el error el control calcula el mando de control, u(t), donde K c es la ganancia del control. t 1 de ut () = Kc e+ edt + Td Ti dt 0 E. 3.2 Si el error y la salida del control son del mismo rango, -100% a 100%, la ganancia del control es proporcional a esta banda. T i es el tiempo de integración en minutos y T d es la acción diferencial, también en minutos. Las siguientes fórmulas representan la acción proporcional u P (t), integral u I (t) y diferencial u D (t) respectivamente. u () t = K e E. 3.3 P t Kc ui () t = e dt T c i E de ud() t = Kc Td E. 3.5 dt La implementación del algoritmo PID que contiene el PID Control Toolkit de Labview es por tanto en el formato no interactivo o paralelo. El bloque del control PID está representado en la Figura 3.1. Manual del usuario. 136
, T d acción diferencial (min).")
148 Figura 3.1: Bloque PID de Labview. Las variables de entrada y de salida de este bloque son: Output range: Limita el valor de la señal de salida. Setpoint: Valor de la referencia, SP en la ecuación E Process variable: Valor de la variable medida que cierra el lazo, PV en la ecuación E PID gains: Almacena el valor de los parámetros del control PID, K c acción proporcional, T i acción integral (min), T d acción diferencial (min). dt (s): Intervalo de tiempo, segundos, en el que VI es llamado. Reinitialize: Cuando toma el valor true reinicia la salida a su valor inicial. Output: Señal de salida del control PID. dt out(s): Actual intervalo de tiempo. El proceso de aplicación del algoritmo es el siguiente. Cálculo del error: Acción proporcional: ek ( ) = SP PVf E. 3.6 ( ) u ( k) K * e k P = E. 3.7 c Manual del usuario. Bibliografía 137

149 Integral trapezoidal: Se emplea para evitar cambios repentinos en PV o SP. ( ) ei ( 1) k K ei+ c ui ( k) = Δt T i i = 1 2 E. 3.8 El diagrama de bloques que corresponde a este algoritmo se muestra en la Figura 3.2. El diagrama incluye internamente un algoritmo anti-windup (la variable re initialize debe tener el valor true), de esta forma la acción integral no acumula error mientras el mando se encuentra en saturación. Figura 3.2: Diagrama de bloques de la acción integral. Acción diferencial: Td ud( k) = Kc PVf k PVf k 1 Δt ( ( ) ( )) E. 3.9 El diagrama de bloques que implementa el algoritmo de la acción diferencial se encuentra en la siguiente figura. Manual del usuario 138

150 Figura 3.3: Diagrama de bloques de la acción diferencial. La salida del control es la suma de las acciones anteriores. ( ) ( ) ( ) uk ( ) = up k + ui k + ud k E Manual del usuario 139
151 4 Ensayo en lazo abierto Este programa se ha empleado en el transcurso de este proyecto para realizar la puesta en funcionamiento del prototipo y para la adquisición de datos a partir de los cuales se obtuvo un modelo del sistema por el método basado en los principios físicos. El uso de la aplicación es muy intuitivo, a continuación se describen los pasos a seguir para su utilización. I. Encender el hardware de adquisición de datos de National Instruments, a continuación conectar los ventiladores y la placa de alimentación del módulo termoeléctrico a la red. II. Abrir el fichero url_la.vi. Los elementos que aparecen en el panel frontal se detallan a continuación, en la Figura Figura 4.1: Interfaz del ensayo en lazo abierto. Manual del usuario 140
152 1. STOP: Para el programa. 2. Voltage output: Señal de mando que se dirige al servoamplificador, se introduce moviendo el slider o introduciendo el valor deseado con el teclado. 3. Temperaturas: AIRE 1: Temperatura del flujo de aire. AIRE 2: Temperatura ambiente. El resto de temperaturas corresponde a las temperaturas medidas en el lado caliente (A) y frío (B) de cada una de los cuatro módulos termoeléctricos que hay instalados en el prototipo. La gráfica muestra la evolución temporal de dichas temperaturas. 4. Resumen: Tensión: Tensión proporcional a la corriente de alimentación al módulo termoeléctrico. Corresponde con la señal P1-8 del servoamplificador. Salida chorro: Temperatura del flujo de aire. Promedio A: Media aritmética de las temperaturas del lado caliente de los cuatro módulos termoeléctricos. Promedio B: Media aritmética de las temperaturas del lado frío de los cuatro módulos termoeléctricos. La gráfica muestra la evolución temporal de dichas señales. III. Indicar en Voltage output el valor de la señal de mando deseado. Esta señal se puede cambiar en el transcurso del ensayo. Manual del usuario 141
153 IV. Pulsar para iniciar el ensayo. V. Pulsar STOP para finalizar el ensayo. Manual del usuario 142

154 5 Ensayo en lazo cerrado Este programa se ha empleado para implantar los controles diseñados con el modelo obtenido con el método de la caja negra. El uso de la aplicación es muy intuitivo al igual que el programa para realizar ensayos en lazo abierto, a continuación se describen los pasos a seguir para su utilización. I. Encender el hardware de adquisición de datos de National Instruments, a continuación conectar los ventiladores y la placa de alimentación del módulo termoeléctrico a la red. II. Abrir el fichero url_pid.vi. Los elementos que aparecen en el panel frontal se detallan a continuación, en la Figura Figura 5.1: Interfaz del ensayo en lazo cerrado. Manual del usuario 143
155 1. STOP: Para el programa. 2. Temperatura buscada: Control para fijar la temperatura del flujo de aire que se quiere alcanzar. 3. PID parameters: Controles numéricos para modificar los parámetros del controlador. Estos parámetros corresponden a un control PID cuya estructura ha sido expuesta en el apartado 3. K C : Acción proporcional. T i (min): Acción integral. T d (min): Acción diferencial, cuyo valor ha sido cero en todos los ensayos realizados. 4. Saturación up/down: Control para introducir la saturación del mando. 5. Intensidad: I medida: Señal P1-8 proporcionada por el amplificador, es una tensión proporcional a la corriente de salida del servoamplificador. Mando: Tensión de mando, es decir, es la señal de salida del control que se dirige a la entrada del servoamplificador 12A8. La gráfica muestra la evolución temporal de dichas tensiones. 6. Referencia y salida: Referencia: Temperatura de referencia. Salida chorro: Temperatura del flujo de aire. Promedio A: Media aritmética de las temperaturas del lado caliente de los cuatro módulos termoeléctricos. Manual del usuario 144
156 Promedio B: Media aritmética de las temperaturas del lado frío de los cuatro módulos termoeléctricos. La gráfica muestra la evolución temporal de dichas temperaturas. 7. Temperaturas: AIRE 1: Temperatura del flujo de aire. AIRE 2: Temperatura ambiente. El resto de temperaturas corresponde a las temperaturas medidas en el lado caliente (A) y frío (B) de cada una de los cuatro módulos termoeléctricos que hay instalados en el prototipo. La gráfica muestra la evolución temporal de dichas temperaturas. III. IV. Indicar en Temperatura buscada la temperatura de referencia que se desea alcanzar en el flujo de aire. El valor de esta variable se puede modificar durante el ensayo. Indicar en PID parameters el valor de los parámetros del control. El valor de los parámetros del control se pueden modificar durante el ensayo. V. Pulsar para iniciar el ensayo. VI. Pulsar STOP para finalizar el ensayo. Manual del usuario 145
157 Parte IV CÓDIGO Código 146
158 1 Modelado En este apartado se presenta el código utilizado para obtener la función de transferencia que representa el modelo obtenido por el método de caja gris. Para el modelado basado en principios físicos el código para obtener los parámetros es similar al presentado, ya que ambos emplean técnicas de métodos matemáticos. Prepara datos ajuste Los datos adquiridos a través de hardware de Nacional Instruments son analizados por medio de programas en Matlab. Los datos pueden ser leídos en formato lvm ejecutando el siguiente código. El siguiente código, correspondiente al programa prep_datos_ajuste.m, tiene la función de escoger un tramo de los datos adquiridos para posteriormente obtener a través de un algoritmo de ajuste por mínimos cuadrados un modelo del sistema load K2 %Asignación de variables tiempo=ensayo(:,1); tref=ensayo(:,2); % Temperatura de referencia mando=ensayo(:,3); %Tensión de mando, salida del control tamb=ensayo(:,5); % Temperatura ambiente tchorro=ensayo(:,4); %Temperatura del flujo de aire Imedida=ensayo(:,14); % Tensión proporcional a la corriente que %suministra el servoamplificador thot=(ensayo(:,8)+ensayo(:,7)+ensayo(:,9))/3; % Temperatura caliente Código 147
159 tcold=(ensayo(10)+ensayo(:,11)+ensayo(:,12)+ensayo(:,13))/4; %Temperatura %fría plot([tref tchorro Imedida]) disp('hacer zoom en la zona de interés de la figura') disp('después, pulsar cualquier tecla') pause [aux1,aux2]=ginput(2); aux1=ceil(aux1); time=tiempo(aux1(1):aux1(2))-tiempo(aux1(1)); tfin=time(end); ent=imedida(aux1(1):aux1(2)); %ent=ent-ent(1); ent=ent-mean(ent(1:30)); sal=tchorro(aux1(1):aux1(2)); %sal=sal-sal(1); sal=sal-mean(sal(1:30)); Algoritmo de ajuste por mínimos cuadrados A partir de los datos escogidos ejecutando el programa anterior y asignando unos valores iniciales a las constantes de tiempo de un modelo de segundo orden se obtiene las constantes de tiempo de una función de transferencia que representa el modelo del sistema. Este código está contenido en el fichero ajuste.m. clear theta thaux dgn J format compact Código 148
160 format short e %%%%%%%%%%%% PARAMETROS Y VALORES INICIALES %%%%%%%%%%%%%%%%%% th=[ ]; % 2º orden con cero: %th(1)*(1+th(4)*s)/[(1+th(2)*s)(1+th(3)*s)] theta=th; Np=length(theta); % Numero de parámetros %%%%%%%%%%%%%% PARAMETROS DEL ALGORITMO %%%%%%%%%%%%%%%%%%%%%%%%% %tfin=length(time)-1; % Tiempo final de simulación Tsamp=ts; % Intervalo fijo de integración Nd=tfin/Tsamp; % Numero de datos en el ajuste tol1=1; % Tolerancia (variación de la función objetivo 'V') tol2=1; % Tolerancia (variación de los parámetros 'theta') V=1; % Inicialización del valor anterior la función objetivo Vaux=0.01; % Inicialización del valor nuevo de la función objetivo dgn=ones(1,np); % Dirección de Gauss-Newton niter=0; % Numero de iteraciones %%%%%%%%%%%%%% CHEQUEO DE LA ESTABILIDAD INICIAL %%%%%%%%%%%%%%%% % Matriz de estado del sistema (linealización) [A,B,C,D]=linmod('sistema'); % Flag de estabilidad (la parte real de todos los % autovalores de 'A' son negativas?) stb=all(real(eig(a))<=0); if stb==0 disp('sistema INESTABLE. MODIFICA LOS PARAMETROS DEL REGULADOR') return Código 149
161 end %%%%%%%%%%%%%%%%%ALGORITMO DE AJUSTE %%%%%%%%%%%%%%%%% % El algoritmo se ejecuta mientras (bucle while) la variación de % la función objetivo en % es mayor que 'tol1' o el máximo incremento % en % de los parámetros es mayor que 'tol2'. % También se puede usar como criterio el número de iteraciones. while (100*(V-Vaux)/Vaux>tol1 100*max(abs(dgn./theta))>tol2) niter=niter+1; % Se incrementa el numero de iteraciones % Actualización de los parámetros th=theta; %h0=theta(2); % Simulación del sistema sim('sistema',tfin) ys=y; ym=sal; error=ys-ym; % Función objetivo (error cuadrático medio) V=sqrt(sum((error).^2)/Nd); % Construcción de la matriz Jacobiana por diferencias finitas for i=1:np thaux=theta; h=.001*abs(theta(i)); % Incremento para las derivadas if abs(theta(i))<10*sqrt(eps) h=.01*sqrt(eps); end Código 150
162 thaux(i)=theta(i)+h; th=thaux; % Actualización de los parámetros sim('sistema',tfin) yaux=y; ym=sal; error=yaux-ym; J(:,i)=(yaux-ys)/h; end % Representación gráfica de 'ys', 'ym' y del error=ys-ym clf plot(time,ym,'-r',time,ys,'-b',time,error,'-g') disp('pause') pause disp('vale') grid dgn=(j\(ym-ys))'; % Dirección de Gauss-Newton % BUSQUEDA DE 'MU' (ajuste del paso en la dirección de Gauss- % Newton para garantizar una disminución de la función objetivo mu=2; % Inicialización de mu Vaux=V+10; % Inicialización de la función objetivo en el nuevo %punto stb=1; % Flag de estabilidad del sistema (0-inestable: 1-estable) % Búsqueda de 'mu' mientras no se reduzca la función objetivo o el %sistema sea inestable while Vaux > V stb==0 Código 151
163 mu=mu/2; % Reducción del paso thaux=theta+mu*dgn; % Actualización de parámetros th=thaux; % Actualización de los parámetros del regulador % Matriz de estado del sistema (linealización) [A,B,C,D]=linmod('sistema'); % Flag de estabilidad ( la parte real de todos los % autovalores de 'A' son negativas?) stb=all(real(eig(a))<=0); % Simulación con los nuevos parámetros if stb==0 yaux=zeros(size(yaux)); else sim('sistema',tfin) yaux=y; ym=sal; error=yaux-ym; end % Actualización de la función objetivo Vaux=stb*sqrt(sum((yaux-ym).^2)/Nd); end % Parámetros y función objetivo en pantalla theta=thaux Vaux end Código 152
164 2 Control PI El siguiente programa calcula los parámetros del control PI. El código está contenido en el programa PI.m. s=tf('s'); % Variable de Laplace th=[ ]; %Función de transferencia P=zpk((th(1)*th(4)*s+th(1))/((th(2)*th(3))*s^2+(th(2)+th(3))*s+1)); Mf=--; %Margen de fase fipi=--; %Fase del control FUN2='(180/pi)*(atan2(x, )-atan2(x,0.2828)-atan2(x, )) '; x=fzero(fun2,10); wo=x; Ac2=1/((( )*(sqrt(0.3692^2+wo^2)))/(sqrt(0.2828^2+wo^2)*sqrt( ^2+wo^2))); %Ganancia del control %Parámetros del control I=-1/(tan((fipi2)*(pi/180))*wo); Kp=Ac2*cos(fipi2*(pi/180)); Ki=Kp/I; C=Kp*((I*s+1)/(I*s)); G=minreal(C*P1); F=minreal(G/(1-G)); %Función del lazo cerrado Fu=minreal(C/(1-G)); % Función del mando Código 153
165 Parte V DATASHEETS Datasheets 154
166 1 Transformador Datasheets 155

167 Datasheets 156
168 Datasheets 157
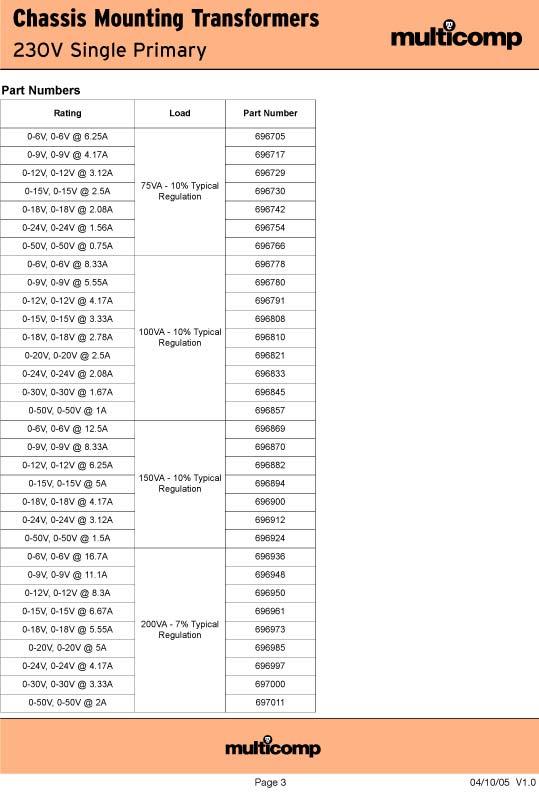
169 Datasheets 158
170 2 Puente rectificador BR1010 Datasheets 159

171 Datasheets 160

172 Datasheets 161
173 3 Regulador de tensión MC7812C Datasheets 162
174 Datasheets 163
175 Datasheets 164
176 Datasheets 165
177 Datasheets 166
178 Datasheets 167

179 Datasheets 168
180 Datasheets 169
181 4 Servoamplificador 12A8 Datasheets 170
182 Datasheets 171
183 Datasheets 172
184 Datasheets 173
185 Datasheets 174
186 Datasheets 175
187 Datasheets 176
188 Datasheets 177
189 5 Bobinas Datasheets 178

190 Datasheets 179
191 Datasheets 180
192 6 Módulo termoeléctrico DT12-6 Datasheets 181

193 Datasheets 182
194 Datasheets 183
195 7 Termopar tipo K Datasheets 184

196 Datasheets 185

197 Datasheets 186

198 Datasheets 187

199 Datasheets 188
200 8 Hardware de NI Datasheets 189
201 Datasheets 190
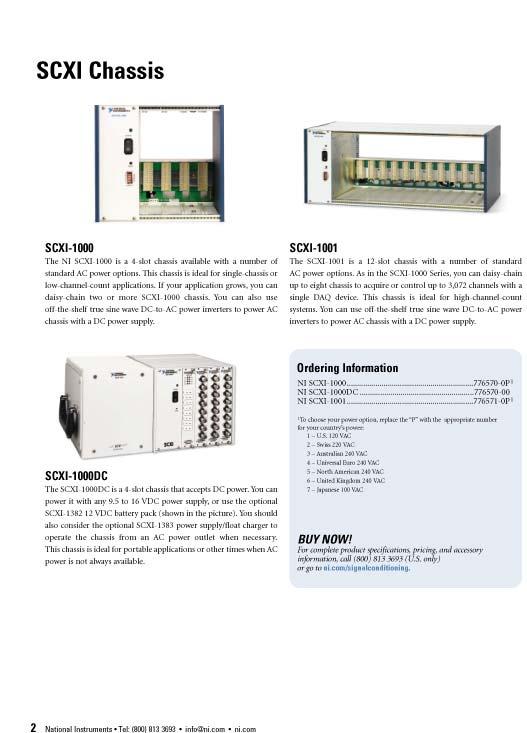
202 Datasheets 191
203 Datasheets 192

204 Datasheets 193

205 Datasheets 194
206 Datasheets 195
207 Datasheets 196
208 Datasheets 197
209 2 Planos
210 ÍNDICE Capítulo 1 Lista de Planos...3 Capítulo 2 Planos...5 Planos. Índice 2
211 LISTA DE PLANOS Planos. Lista de Planos 3
212 Capítulo 1 LISTA DE PLANOS 1.1 Hardware Plano nº 1: Alimentación al módulo termoeléctrico. 1.2 Diagramas Plano nº 2: Diagrama de Simulink del modelo. Plano nº 3: Diagrama de Simulink en lazo cerrado. Plano nº 4: Diagrama de Labview en lazo abierto. Plano nº 5: Diagrama de Labview en lazo cerrado. Planos. Lista de Planos 4
213 PLANOS Planos. Planos 5
214
215 u+273 Ta Current S 1 Cc.s Tc u 2 R/2 1/Rc 1/Rp u+273 Ta S 1 Cf.s Tf u 2 R/2 1/Rf Ta Rch Tch
216 u+273 Ta Ref 0 1 I.s Antiwindup Kp -1 Saturación u 2 S R/2 1 Cc.s 1/Rc Tc == 1/Rp u+273 Ta S 1 Cf.s Tf u 2 R/2 1/Rf Ta Rch Tch
217 DIAGRAMA INTERNO input terminal configuration auto cleanup differential minimum value -10,00E+0 maximum value 10,00E+0 S C S C CJC Source 2 Minimum Value (deg C) Maximum Value (deg C) SCXI Module? True Continuous Samples 1 1 Samples to Read Select Signals4 Signals Signal Out temperaturas Write LabVIEW Measurement File Signals OK message + warnings 9. error in channel name AI Voltage DAQmx Task DAQmx Channel Channels ActiveChans AI Temp TC AI.AutoZeroMode Sample Clock Analog 1D Wfm Resumen timeout NChan NSamp status 10, MyVoltage0 units Volts custom scale name K CJC Value Auto Zero Mode Select Signals Signals Signal Out Write current2 Signals Signals Signal Out 4 Signals 0 Voltage Output Signal Out SC1Mod3/ao ,00 OK message + warnings AO Voltage Analog DBL 1Chan 1Samp STOP temperaturas 44,5 40,0 35,0 30,0 25,0 PANEL FRONTAL SC1Mod2/ai21 SC1Mod2/ai22 SC1Mod2/ai23 Resumen 26,0 24,0 22,0 20,0 18,0 Steps: 1. Create a Thermocouple (TC) temperature measurement channel. 2. Get all the channels in the task. 3. Convert channel(s) array to a comma-delimited channel string. 4. This attribute is set to compensate for input offset errors. May not be supported by all devices*. 5. Call the Timing VI to specify the hardware timing parameters. Use device's internal clock, continuous mode acquisition and the sample rate specified by the user. 6. Call the Start VI to program and start the acquisition. 7. Read N samples and plot it. By default, the Read VI reads all available samples, but you can specify how many samples to read at a time and the timeout value. Continue reading data until the stop button is pressed or an error occurs. 8. Call the Clear Task VI to clear the Task. 9. Use the popup dialog box to display an error if any. * If your device does not support Auto Zero Mode bypass Step 2, 3, and 4. Steps: 1. Create an Analog Output Voltage Channel 2. Use the Write VI to Generate 1 Sample to 1 Channel on the Data Acquisition Card. 3. Call the Clear Task VI to clear the Task. 4. Use the popup dialog box to display an error if any. SC1Mod2/ai24 16,0 20,0 15,0 SC1Mod2/ai25 SC1Mod2/ai26 SC1Mod2/ai27 14,0 12,0 9,5 11:38:59,968 16/07/2008 Time 11:41:38,968 16/07/2008 SC1Mod2/ai28 SC1Mod2/ai29 SC1Mod2/ai30 10,0 8,0 6,0 Minimum Value (deg C) 0,00 Maximum Value (deg C) 100,00 AIRE1 AIRE2 P1.A-23 P2.A-24 24,44 24,02 24,70 24,31 Voltage Output 9,995 0,000 8,000 6,000 4,000 Tensión 0,05 Salida chorro 24,44 promedio A 24,46 promedio B 24,45 4,0 2,0 0, Time P3.A-25 P4.A-26 P1.B-27 P2.B-28 P3.B-29 24,35 24,47 24,49 24,37 24,53 2,000 0,000-2,000-4,000-6,000-8,000 MyVoltage0 SC1Mod2/ai21 SC1Mod2/ai23 SC1Mod2/ai27 P4.B-30 24,41-10,000

218 DIAGRAMA INTERNO input terminal configuration differential auto cleanup minimum value - 1 0, 0 0 E + 0 maximum value 1 0, 0 0 E + 0 S C Minimum Value (deg C) Maximum Value (deg C) SCXI Module? True Continuous Samples Rate 1 Select Signals4 Signals Signal Out temperaturas OK message + warnings 9. error in channel name MyVoltage0 units AI Voltage S C K DAQmx Task DAQmx Channel Channels ActiveChans AI Temp TC AI.AutoZeroMode Sample Clock Analog 1D Wfm timeout NChan NSamp status 1 0, Auto Zero Mode Volts custom scale name CJC Value Write current2 Comment Signals temperatura buscada PID parameters ref y salida 0 saturacion up 1 0 saturacion down Select Signals Signals Signal Out Signals Signal Out 4 OK message + warnings SC1Mod3/ a o 0 AO Voltage 1 0, 0 0 Analog DBL 1 Cha n 1 Sa m p Signals Signal Out Signals Signal Out Intensidad PANEL FRONTAL error in status code 0 source 3. Steps: 1. Create an Analog Output Voltage Channel Use the Write VI to Generate 1 Sample to 1 Channel on the Data Acquisition Card. 3. Call the Clear Task VI to clear the Task. 4. Use the popup dialog box to display an error if any. temperaturas Intensidad STOP 40,0 35,0 2,8 2,6 30,0 2,4 Rate 1,00 25,0 20,0 15,0 10,0 5,0 0,0-5,0 SC1Mod2/ai21 SC1Mod2/ai22 SC1Mod2/ai23 SC1Mod2/ai24 SC1Mod2/ai25 SC1Mod2/ai26 SC1Mod2/ai27 AIRE1 AIRE2 P1.A-23 P2.A-24 P3.A-25 P4.A-26 P1.B-27 19,96 23,88 0,00 31,20 31,06 31,21 17,23 I medida Mando 0,44 1,08 2,2 2,0 1,8 1,6 1,4 1,2 1,0 0,8 0,6-10,0 10:30:39,023 16/07/2008 Time 10:47:42,023 16/07/2008 SC1Mod2/ai28 SC1Mod2/ai29 SC1Mod2/ai30 P2.B-28 P3.B-29 P4.B-30 17,07 17,29 17,09 0,4 0,2 0,0 10:30:37,644 16/07/2008 Time 10:47:40,691 16/07/2008 MyVoltage0 ref y salida Mando temperatura buscada 20 PID parameters Kc 1,1272 Ti (min) 0,5081 Td (min) 0,0000 saturacion up 3 saturacion down 0 40,0 38,0 36,0 34,0 32,0 30,0 28,0 26,0 24,0 22,0 Referencia 20,00 20,0 Salida chorro 19,96 18,0 promedio A promedio B 24,86 17,17 16,0 14,0 12, Time SC1Mod3/ai0 SC1Mod2/ai21 SC1Mod2/ai23 SC1Mod2/ai27
CLIMATIZACIÓN MEDIANTE VENTANAS TERMOACTIVAS BASADAS EN CÉLULAS PELTIER
 RESUMEN CLIMATIZACIÓN MEDIANTE VENTANAS TERMOACTIVAS BASADAS EN CÉLULAS PELTIER Autor: Nectalí Fernández, Alejandro. Director: Rodríguez Pecharromán, Ramón. Entidad Colaboradora: ICAI-Universidad Pontificia
RESUMEN CLIMATIZACIÓN MEDIANTE VENTANAS TERMOACTIVAS BASADAS EN CÉLULAS PELTIER Autor: Nectalí Fernández, Alejandro. Director: Rodríguez Pecharromán, Ramón. Entidad Colaboradora: ICAI-Universidad Pontificia
CLIMATIZACIÓN MEDIANTE CÉLULAS PELTIER
 Resumen I CLIMATIZACIÓN MEDIANTE CÉLULAS PELTIER Autor: Herranz Pindado, Rocío. Director: Rodríguez Pecharromán, Ramón. Entidad Colaboradora: ICAI-Universidad Pontificia Comillas. RESUMEN DEL PROYECTO
Resumen I CLIMATIZACIÓN MEDIANTE CÉLULAS PELTIER Autor: Herranz Pindado, Rocío. Director: Rodríguez Pecharromán, Ramón. Entidad Colaboradora: ICAI-Universidad Pontificia Comillas. RESUMEN DEL PROYECTO
CLIMATIZACIÓN MEDIANTE VENTANAS TERMOACTIVAS BASADAS EN CÉLULAS PELTIER UNIVERSIDAD PONTIFICIA COMILLAS PROYECTO FIN DE CARRERA
 UNIVERSIDAD PONTIFICIA COMILLAS ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA (ICAI) INGENIERO INDUSTRIAL PROYECTO FIN DE CARRERA CLIMATIZACIÓN MEDIANTE VENTANAS TERMOACTIVAS BASADAS EN CÉLULAS PELTIER AUTOR:
UNIVERSIDAD PONTIFICIA COMILLAS ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA (ICAI) INGENIERO INDUSTRIAL PROYECTO FIN DE CARRERA CLIMATIZACIÓN MEDIANTE VENTANAS TERMOACTIVAS BASADAS EN CÉLULAS PELTIER AUTOR:
F - INGENIERÍA TÉRMICA Y TRANSFERENCIA DE CALOR
 IT 03.2 - TRANSMISIÓN DE CALOR POR CONVECCIÓN NATURAL Y FORZADA (pag. F - 1) TC 01.1 - ALIMENTADOR PARA INTERCAMBIADORES DE CALOR (pag. F - 3) TC 01.2 - INTERCAMBIADOR DE CALOR DE PLACAS (pag. F - 5) TC
IT 03.2 - TRANSMISIÓN DE CALOR POR CONVECCIÓN NATURAL Y FORZADA (pag. F - 1) TC 01.1 - ALIMENTADOR PARA INTERCAMBIADORES DE CALOR (pag. F - 3) TC 01.2 - INTERCAMBIADOR DE CALOR DE PLACAS (pag. F - 5) TC
ESTE PROYECTO CONTIENE LOS SIGUIENTES DOCUMENTOS
 ESTE PROYECTO CONTIENE LOS SIGUIENTES DOCUMENTOS DOCUMENTO Nº 1, MEMORIA 1.1 Memoria pág. 4 a 127 124 páginas 1.2 Estudio Económico pág. 128 a 130 3 páginas 1.3 Manual del Usuario pág. 131 a 149 19 páginas
ESTE PROYECTO CONTIENE LOS SIGUIENTES DOCUMENTOS DOCUMENTO Nº 1, MEMORIA 1.1 Memoria pág. 4 a 127 124 páginas 1.2 Estudio Económico pág. 128 a 130 3 páginas 1.3 Manual del Usuario pág. 131 a 149 19 páginas
GEOTERMIA. FRÍO PASIVO Y ACTIVO.
 Frío pasivo, frío activo y combinación de ambos en aplicaciones con bombas de calor geotérmica. Un sistema geotérmico de baja entalpía se sirve de una bomba de calor y un sistema de captación en el subsuelo
Frío pasivo, frío activo y combinación de ambos en aplicaciones con bombas de calor geotérmica. Un sistema geotérmico de baja entalpía se sirve de una bomba de calor y un sistema de captación en el subsuelo
LABORATORIO TERMODINÁMICA PRÁCTICA 4: RENDIMIENTO DE UNA MÁQUINA TÉRMICA
 LABORATORIO TERMODINÁMICA PRÁCTICA 4: RENDIMIENTO DE UNA MÁQUINA TÉRMICA 1. OBJETIVO Determinar el rendimiento de una máquina térmica 2. MATERIAL - Aparato de eficiencia térmica PASCO Modelo TD-8564. -
LABORATORIO TERMODINÁMICA PRÁCTICA 4: RENDIMIENTO DE UNA MÁQUINA TÉRMICA 1. OBJETIVO Determinar el rendimiento de una máquina térmica 2. MATERIAL - Aparato de eficiencia térmica PASCO Modelo TD-8564. -
FLEXIBOX 450 (48V DC) THERMOSIFÓN DC
 THERMOSIFÓN DC") Flexibox TELECOMUNICACIONES Amplia gama Flexibox free-cooling indicado específicamente para controlar el ambiente interior de las cabinas de telecomunicaciones, con un consumo mínimo de energía. Tipo 460
Flexibox TELECOMUNICACIONES Amplia gama Flexibox free-cooling indicado específicamente para controlar el ambiente interior de las cabinas de telecomunicaciones, con un consumo mínimo de energía. Tipo 460
P A R T A D O. 5 Diseño térmico. Electrónica Industrial
 A 3.4 P A R T A D O 5 Diseño térmico 52 A Introducción 3.4 A. Introducción Siempre que por un elemento conductor circula una corriente eléctrica, se generan unas pérdidas de potencia que elevan la temperatura
A 3.4 P A R T A D O 5 Diseño térmico 52 A Introducción 3.4 A. Introducción Siempre que por un elemento conductor circula una corriente eléctrica, se generan unas pérdidas de potencia que elevan la temperatura
TITULO. Mesa Peltier RESUMEN
 1 TITULO Mesa Peltier RESUMEN Descripción y funcionamiento del prototipo didáctico. El elemento principal de este prototipo son las células Peltier, las cuales funcionan con dos caras: una que enfría y
1 TITULO Mesa Peltier RESUMEN Descripción y funcionamiento del prototipo didáctico. El elemento principal de este prototipo son las células Peltier, las cuales funcionan con dos caras: una que enfría y
H - CALEFACCIÓN Y REFRIGERACIÓN
 AC 03.1 - DEMOSTRACIÓN DE BOMBA DE CALOR (pag. H - 1) CV 04.1 - DEMOSTRACION DE CALDERAS DE CALEFACCIÓN Y ACS (pag. H - 3) CV 04.2 - MODULO DISIPACIÓN TÉRMICA (pag. H - 5) RF 01.1 - CÁMARA FRIGORÍFICA
AC 03.1 - DEMOSTRACIÓN DE BOMBA DE CALOR (pag. H - 1) CV 04.1 - DEMOSTRACION DE CALDERAS DE CALEFACCIÓN Y ACS (pag. H - 3) CV 04.2 - MODULO DISIPACIÓN TÉRMICA (pag. H - 5) RF 01.1 - CÁMARA FRIGORÍFICA
Materiales Termoeléctricos. Basante Avendaño Alberto López Márquez González Bernardo Rosales Sánchez David Octavio
 Materiales Termoeléctricos { Basante Avendaño Alberto López Márquez González Bernardo Rosales Sánchez David Octavio Que son los materiales termoeléctricos? Los materiales termoeléctricos se basan en el
Materiales Termoeléctricos { Basante Avendaño Alberto López Márquez González Bernardo Rosales Sánchez David Octavio Que son los materiales termoeléctricos? Los materiales termoeléctricos se basan en el
Capítulo 10: ciclos de refrigeración. El ciclo de refrigeración por compresión es un método común de transferencia de calor de una
 Capítulo 0: ciclos de refrigeración El ciclo de refrigeración por compresión es un método común de transferencia de calor de una temperatura baja a una alta. ENTRA IMAGEN capítulo 0-.- CAOR ambiente 2.-
Capítulo 0: ciclos de refrigeración El ciclo de refrigeración por compresión es un método común de transferencia de calor de una temperatura baja a una alta. ENTRA IMAGEN capítulo 0-.- CAOR ambiente 2.-
METODOS DE PRODUCCION DE FRIO APLICADOS EN LOS SISTEMAS DE AIRE ACONDICIONADO
 METODOS DE PRODUCCION DE FRIO APLICADOS EN LOS SISTEMAS DE AIRE ACONDICIONADO 1.- Introducción Transporte de energía térmica desde un foco a baja temperatura a otro a alta temperatura; para ello es necesario
METODOS DE PRODUCCION DE FRIO APLICADOS EN LOS SISTEMAS DE AIRE ACONDICIONADO 1.- Introducción Transporte de energía térmica desde un foco a baja temperatura a otro a alta temperatura; para ello es necesario
EFECTO TERMOLÉCTRICO. Este efecto, conocido como Peltier Seebeck, es reversible. Esto no se produce en todos los materiales
 EFECTO TERMOLÉCTRICO Los dispositivos termoeléctricos se basan en el hecho de que cuando ciertos materiales son calentados, generan un voltaje eléctrico significativo. Los electrones se mueven del extremo
EFECTO TERMOLÉCTRICO Los dispositivos termoeléctricos se basan en el hecho de que cuando ciertos materiales son calentados, generan un voltaje eléctrico significativo. Los electrones se mueven del extremo
TERMOLECTRICIDAD: MÓDULO PELTIER
 PRÁCICA 6 ERMOLECRICIDAD: MÓDULO PELIER OBJEIO Estudio de los efectos Seebeck y Peltier en un módulo de pares termoeléctricos. MAERIAL NECESARIO - Caja del módulo Peltier - Fuente de alimentación DC de
PRÁCICA 6 ERMOLECRICIDAD: MÓDULO PELIER OBJEIO Estudio de los efectos Seebeck y Peltier en un módulo de pares termoeléctricos. MAERIAL NECESARIO - Caja del módulo Peltier - Fuente de alimentación DC de
A.- Electrones fluyendo por un buen conductor eléctrico, que ofrece baja resistencia.
 DEPARTAMENTO DE ORIENTACIÓN: TECNOLOGÍA 4E_F Primer trimestre Curso: 2014/2015 TEMA II: ELECTRICIDAD Y ELECTRÓNICA La electrónica forma parte de nuestra vida cotidiana.- Los electrodomésticos, los medios
DEPARTAMENTO DE ORIENTACIÓN: TECNOLOGÍA 4E_F Primer trimestre Curso: 2014/2015 TEMA II: ELECTRICIDAD Y ELECTRÓNICA La electrónica forma parte de nuestra vida cotidiana.- Los electrodomésticos, los medios
TEMA 2: ELECTRICIDAD Y ELECTRÓNICA
 TEMA 2: ELECTRICIDAD Y ELECTRÓNICA 2.1. Electrónica. Componentes electrónicos. La electrónica estudia los circuitos y los componentes que permiten modificar la corriente eléctrica. Algunos de estos componentes
TEMA 2: ELECTRICIDAD Y ELECTRÓNICA 2.1. Electrónica. Componentes electrónicos. La electrónica estudia los circuitos y los componentes que permiten modificar la corriente eléctrica. Algunos de estos componentes
Control HVAC con KNX. Integración de los Sistemas de Calefacción, Aire Acondicionado y Ventilación para la Eficiencia Energética
 Control HVAC con KNX Integración de los Sistemas de Calefacción, Aire Acondicionado y Ventilación para la Eficiencia Energética Índice Temático 1. Conceptos Generales 2. Distintas Tecnologías de Climatización
Control HVAC con KNX Integración de los Sistemas de Calefacción, Aire Acondicionado y Ventilación para la Eficiencia Energética Índice Temático 1. Conceptos Generales 2. Distintas Tecnologías de Climatización
6.1. DESCRIPCIÓN DEL SISTEMA DE REFRIGERACIÓN A SIMULAR
 6. EJEMPLO DE APLICACIÓN 6.1. DESCRIPCIÓN DEL SISTEMA DE REFRIGERACIÓN A SIMULAR En el presente apartado, se va a realizar una descripción de los componentes y el modo de funcionamiento del sistema de
6. EJEMPLO DE APLICACIÓN 6.1. DESCRIPCIÓN DEL SISTEMA DE REFRIGERACIÓN A SIMULAR En el presente apartado, se va a realizar una descripción de los componentes y el modo de funcionamiento del sistema de
CUALIDADES Y BENEFICIOS DE LA BOMBA DE CALOR
 CUALIDADES Y BENEFICIOS DE LA BOMBA DE CALOR Qué es la Bomba de Calor? La Bomba de Calor puede definirse como una máquina térmica que, utilizando un gas refrigerante en un ciclo termodinámico cerrado,
CUALIDADES Y BENEFICIOS DE LA BOMBA DE CALOR Qué es la Bomba de Calor? La Bomba de Calor puede definirse como una máquina térmica que, utilizando un gas refrigerante en un ciclo termodinámico cerrado,
Termoelectricidad. por efecto Joule está dada por la siguiente expresión:
 Laboratorio 4 Departamento de Física rof. Fernando Stefani Facultad de Ciencias Exactas y aturales Termoelectricidad OBJETIVOS: Observar y caracterizar una celda termoeléctrica Obtener para dicha celda
Laboratorio 4 Departamento de Física rof. Fernando Stefani Facultad de Ciencias Exactas y aturales Termoelectricidad OBJETIVOS: Observar y caracterizar una celda termoeléctrica Obtener para dicha celda
Tema 4. Máquinas Térmicas III
 Asignatura: Tema 4. Máquinas Térmicas III 1. Máquinas Frigoríficas 2. Ciclo de refrigeración por compresión de vapor 3. Ciclo de refrigeración por absorción 4. Ciclo de refrigeración por compresión de
Asignatura: Tema 4. Máquinas Térmicas III 1. Máquinas Frigoríficas 2. Ciclo de refrigeración por compresión de vapor 3. Ciclo de refrigeración por absorción 4. Ciclo de refrigeración por compresión de
MEDICIÓN DE CONDUCTIVIDAD TÉRMICA
 MEDICIÓN DE CONDUCTIVIDAD TÉRMICA Introducción: Las soluciones de la Ley de Fourier en su formulación diferencial, empleando las condiciones de borde adecuadas, permite resolver el problema de conducción
MEDICIÓN DE CONDUCTIVIDAD TÉRMICA Introducción: Las soluciones de la Ley de Fourier en su formulación diferencial, empleando las condiciones de borde adecuadas, permite resolver el problema de conducción
DISIPADOR HÍBRIDO DE ALTOS FLUJOS ENERGÉTICOS
 DISIPADOR HÍBRIDO DE ALTOS FLUJOS ENERGÉTICOS El uso de este sistema permite adaptar los perfiles de temperatura del objeto enfriado a sus necessidades específicas y reducir los posibles daños a los elementos
DISIPADOR HÍBRIDO DE ALTOS FLUJOS ENERGÉTICOS El uso de este sistema permite adaptar los perfiles de temperatura del objeto enfriado a sus necessidades específicas y reducir los posibles daños a los elementos
F. Tipos de transformaciones. Ciclos termodinámicos. Rendimientos de una máquina térmica
 F. Tipos de transformaciones. Ciclos termodinámicos. Rendimientos de una máquina térmica El trabajo no depende solamente del estado energético inicial y final del sistema, sino también depende del camino
F. Tipos de transformaciones. Ciclos termodinámicos. Rendimientos de una máquina térmica El trabajo no depende solamente del estado energético inicial y final del sistema, sino también depende del camino
"DETERMINACIÓN DEL RENDIMIENTO DE UNA MÁQUINA TÉRMICA"
 EXPERIMENTO FA3 LABORATORIO DE FÍSICA AMBIENTAL "DETERMINACIÓN DEL RENDIMIENTO DE UNA MÁQUINA TÉRMICA" MATERIAL: 1 (1) DISPOSITIVO PELTIER. 2 (1) POLÍMETRO (FUNCIÓN DE ÓHMETRO). 3 (1) POLÍMETRO (FUNCIÓN
EXPERIMENTO FA3 LABORATORIO DE FÍSICA AMBIENTAL "DETERMINACIÓN DEL RENDIMIENTO DE UNA MÁQUINA TÉRMICA" MATERIAL: 1 (1) DISPOSITIVO PELTIER. 2 (1) POLÍMETRO (FUNCIÓN DE ÓHMETRO). 3 (1) POLÍMETRO (FUNCIÓN
Unidad I Análisis de Sistemas Realimentados
 Prof. Gerardo Torres - gerardotorres@ula.ve - Cubículo 003 Departamento de Circuitos y Medidas de la Escuela de Ingeniería Eléctrica de la Universidad de Los Andes Unidad I Análisis de Sistemas Realimentados
Prof. Gerardo Torres - gerardotorres@ula.ve - Cubículo 003 Departamento de Circuitos y Medidas de la Escuela de Ingeniería Eléctrica de la Universidad de Los Andes Unidad I Análisis de Sistemas Realimentados
8. Instrumentación y sistema de adquisición de datos
 8. Instrumentación y sistema de adquisición de datos Para poder obtener la información de interés del ensayo como son las potencias, energías, rendimientos Es necesario colocar sensores en todos los equipos.
8. Instrumentación y sistema de adquisición de datos Para poder obtener la información de interés del ensayo como son las potencias, energías, rendimientos Es necesario colocar sensores en todos los equipos.
Tema 6 Regulación de velocidad de motores
 Tema 6 Regulación de velocidad de motores 1. Velocidad de los motores de corriente alterna... 1 2. Conmutación de polos... 2 3. Variación de frecuencia... 3 4. Funcionamiento del regulador de velocidad...
Tema 6 Regulación de velocidad de motores 1. Velocidad de los motores de corriente alterna... 1 2. Conmutación de polos... 2 3. Variación de frecuencia... 3 4. Funcionamiento del regulador de velocidad...
Circuitos rectificadores con diodos
 Circuitos rectificadores con diodos Práctica 3 Índice General 3.1. Objetivos................................ 29 3.2. Introducción teórica.......................... 29 3.3. Ejercicios Propuestos..........................
Circuitos rectificadores con diodos Práctica 3 Índice General 3.1. Objetivos................................ 29 3.2. Introducción teórica.......................... 29 3.3. Ejercicios Propuestos..........................
Clase Climatización Eficiente.
 Clase Climatización Eficiente. Rodrigo Pérez G. Ingeniero en Climatización MDCS. Aire Acondicionado. El acondicionamiento de aire es el proceso más completo de tratamiento del aire ambiente de los locales
Clase Climatización Eficiente. Rodrigo Pérez G. Ingeniero en Climatización MDCS. Aire Acondicionado. El acondicionamiento de aire es el proceso más completo de tratamiento del aire ambiente de los locales
CAPITULO XIII RECTIFICADORES CON FILTROS
 CAPITULO XIII RECTIFICADORES CON FILTROS 13.1 INTRODUCCION En este Capítulo vamos a centrar nuestra atención en uno de los circuitos más importantes para el funcionamiento de los sistemas electrónicos:
CAPITULO XIII RECTIFICADORES CON FILTROS 13.1 INTRODUCCION En este Capítulo vamos a centrar nuestra atención en uno de los circuitos más importantes para el funcionamiento de los sistemas electrónicos:
PROCESO DE ACTUACIÓN DEL INTERCAMBIADOR DE CALOR
 ÍNDICE INTRODUCCIÓN DISIPADORES DISIPADOR TÉRMICO PROCESO DE ACTUACIÓN DEL INTERCAMBIADOR DE CALOR MÉTODOS DE ENFRIAMIENTO DISIPADOR HIBRIDO DISIPACIÓN STOCK O DE FÁBRICA DISIPACIÓN MEDIA AVANZADA DISIPACIÓN
ÍNDICE INTRODUCCIÓN DISIPADORES DISIPADOR TÉRMICO PROCESO DE ACTUACIÓN DEL INTERCAMBIADOR DE CALOR MÉTODOS DE ENFRIAMIENTO DISIPADOR HIBRIDO DISIPACIÓN STOCK O DE FÁBRICA DISIPACIÓN MEDIA AVANZADA DISIPACIÓN
Capítulo 5: La segunda ley de la termodinámica.
 Capítulo 5: La segunda ley de la termodinámica. 5.1 Introducción Por qué es necesario un segundo principio de la termodinámica? Hay muchos procesos en la naturaleza que aunque son compatibles con la conservación
Capítulo 5: La segunda ley de la termodinámica. 5.1 Introducción Por qué es necesario un segundo principio de la termodinámica? Hay muchos procesos en la naturaleza que aunque son compatibles con la conservación
ACCIÓN FORMATIVA OBJETIVOS CONTENIDOS INSTALACIONES DE CLIMATIZACIÓN
 ACCIÓN FORMATIVA INSTALACIONES DE CLIMATIZACIÓN OBJETIVOS Caracterizar los diagramas, curvas, tablas y esquema de principio de instalaciones caloríficas, a partir de un anteproyecto, especificaciones técnicas
ACCIÓN FORMATIVA INSTALACIONES DE CLIMATIZACIÓN OBJETIVOS Caracterizar los diagramas, curvas, tablas y esquema de principio de instalaciones caloríficas, a partir de un anteproyecto, especificaciones técnicas
La placa SKW3ZC, es una placa trifásica con salida por transformadores de impulsos con un. Tarjetas de equipos de control para sistemas de potencia
 Componentes Electrónicos Angel Sáenz s.a. es una empresa que fabrica equipos de regulación de electrónica de potencia. El nivel de potencia controlado puede llegar hasta los 10MW. En los montajes de potencia
Componentes Electrónicos Angel Sáenz s.a. es una empresa que fabrica equipos de regulación de electrónica de potencia. El nivel de potencia controlado puede llegar hasta los 10MW. En los montajes de potencia
Parámetros de diseño con una fuente externa: Tensión de entrada: 6V a 12V Corriente máxima: 300mA Potencia máxima disipada: 2,1W
 Introducción Durante el diseño de cualquier circuito, uno de los puntos más importantes es decidir cual será la tensión de alimentación del mismo. En muchos casos, el circuito se alimentará desde una fuente
Introducción Durante el diseño de cualquier circuito, uno de los puntos más importantes es decidir cual será la tensión de alimentación del mismo. En muchos casos, el circuito se alimentará desde una fuente
Unidad V Respuesta de los sistemas de control
 Unidad V Respuesta de los sistemas de control MC Nicolás Quiroz Hernández Un controlador automático compara el valor real de la salida de una planta con la entrada de referencia (el valor deseado), determina
Unidad V Respuesta de los sistemas de control MC Nicolás Quiroz Hernández Un controlador automático compara el valor real de la salida de una planta con la entrada de referencia (el valor deseado), determina
Tema 12: Circuito frigorífico y bombas de calor Guion
 Guion 1. Máquina frigorífica de compresión. 2. Elementos fundamentales de un circuito frigorífico. 3. Máquinas frigoríficas de absorción. 4. Diagrama general de una máquina frigorífica. 4.1 Foco caliente,
Guion 1. Máquina frigorífica de compresión. 2. Elementos fundamentales de un circuito frigorífico. 3. Máquinas frigoríficas de absorción. 4. Diagrama general de una máquina frigorífica. 4.1 Foco caliente,
"MEDIDA DEL COEFICIENTE LINEAL DE EXPANSIÓN TÉRMICA"
 EXPERIMENTO IFA3 LABORATORIO DE FÍSICA AMBIENTAL "MEDIDA DEL COEFICIENTE LINEAL DE EXPANSIÓN TÉRMICA" MATERIAL: 1 (1) BANCO DE MEDIDA DE 70 CM DE LONGITUD DOTADO DE DIAL MICROMÉTRICO Y TERMISTOR. 2 (1)
EXPERIMENTO IFA3 LABORATORIO DE FÍSICA AMBIENTAL "MEDIDA DEL COEFICIENTE LINEAL DE EXPANSIÓN TÉRMICA" MATERIAL: 1 (1) BANCO DE MEDIDA DE 70 CM DE LONGITUD DOTADO DE DIAL MICROMÉTRICO Y TERMISTOR. 2 (1)
CARGA Y CORRIENTE ELÉCTRICA:
 ELECTRICIDAD: CARGA Y CORRIENTE ELÉCTRICA CARGA ELÉCTRICA CORRIENTE ELÉCTRICA CIRCUITO ELÉCTRICO DEFINICIÓN Y COMPONENTES EFECTOS DE LA CORRIENTE ELÉCTRICA TIPOS DE CIRCUITOS MAGNITUDES ELÉCTRICAS VOLTAJE
ELECTRICIDAD: CARGA Y CORRIENTE ELÉCTRICA CARGA ELÉCTRICA CORRIENTE ELÉCTRICA CIRCUITO ELÉCTRICO DEFINICIÓN Y COMPONENTES EFECTOS DE LA CORRIENTE ELÉCTRICA TIPOS DE CIRCUITOS MAGNITUDES ELÉCTRICAS VOLTAJE
ESTUDIO DE CAMBIO DE GAS REFRIGERANTE R22 EN UNIDADES ENFRIADORAS MEDIANTE SIMULACIÓN EN ECOSIMPRO
 ESTUDIO DE CAMBIO DE GAS REFRIGERANTE R22 EN UNIDADES ENFRIADORAS MEDIANTE SIMULACIÓN EN ECOSIMPRO (1) Jesús Prieto Urbano, (1) Mª Carmen Molina, (2) Carlos Gavilán, (1) Jesús Olmedo (1) Iberdrola Ingeniería
ESTUDIO DE CAMBIO DE GAS REFRIGERANTE R22 EN UNIDADES ENFRIADORAS MEDIANTE SIMULACIÓN EN ECOSIMPRO (1) Jesús Prieto Urbano, (1) Mª Carmen Molina, (2) Carlos Gavilán, (1) Jesús Olmedo (1) Iberdrola Ingeniería
La ecuación de Boltzmann
 La ecuación de Boltzmann El movimiento de un portador en un metal o semiconductor está condicionado por un lado por presencia de campos externos (eléctricos, magnéticos), gradientes de temperatura y por
La ecuación de Boltzmann El movimiento de un portador en un metal o semiconductor está condicionado por un lado por presencia de campos externos (eléctricos, magnéticos), gradientes de temperatura y por
1.- CORRIENTE CONTINUA CONSTANTE Y CORRIENTE CONTINUA PULSANTE
 UNIDAD 5: CIRCUITOS PARA APLICACIONES ESPECIALES 1.- CORRIENTE CONTINUA CONSTANTE Y CORRIENTE CONTINUA PULSANTE La corriente que nos entrega una pila o una batería es continua y constante: el polo positivo
UNIDAD 5: CIRCUITOS PARA APLICACIONES ESPECIALES 1.- CORRIENTE CONTINUA CONSTANTE Y CORRIENTE CONTINUA PULSANTE La corriente que nos entrega una pila o una batería es continua y constante: el polo positivo
5 Construcción del prototipo.
 5 Construcción del prototipo. 5.1 - Ensayo de una sola Célula de Peltier. El objetivo del ensayo tiene dos partes: por un lado, obtener datos sobre la dinámica térmica de la célula de Peltier y, por el
5 Construcción del prototipo. 5.1 - Ensayo de una sola Célula de Peltier. El objetivo del ensayo tiene dos partes: por un lado, obtener datos sobre la dinámica térmica de la célula de Peltier y, por el
Principios de máquinas: máquinas frigoríficas
 Página 1 de 5 I. INTRODUCCIÓN Principios de máquinas: máquinas frigoríficas El calor es una manifestación de la energía. Cualquier forma de energía puede transformarse en calor integramente, sin embargo
Página 1 de 5 I. INTRODUCCIÓN Principios de máquinas: máquinas frigoríficas El calor es una manifestación de la energía. Cualquier forma de energía puede transformarse en calor integramente, sin embargo
Motherboard. Daniel Rúa Madrid
 Motherboard Daniel Rúa Madrid Qué es? La Motherboard es la placa principal de circuitos impresos y contiene los buses, que permiten que los datos sean transportados entre los diferentes componentes de
Motherboard Daniel Rúa Madrid Qué es? La Motherboard es la placa principal de circuitos impresos y contiene los buses, que permiten que los datos sean transportados entre los diferentes componentes de
INVERSORES DC AC. Reconocer los inversores dc ac mediante investigación para conocer sus formas de ondas.
 INVERSORES DC AC RESUMEN: Los inversores transforman la corriente continua en corriente alterna mediante el switcheo de transistores, esto se aplica en el control de la magnitud y la frecuencia de la señal
INVERSORES DC AC RESUMEN: Los inversores transforman la corriente continua en corriente alterna mediante el switcheo de transistores, esto se aplica en el control de la magnitud y la frecuencia de la señal
CAPITULO 2: ELEMENTOS Y EQUIPOS
 CAPITULO 2: ELEMENTOS Y EQUIPOS TEMA 2.3 El Regulador de carga/descarga 2.3 EL REGULADOR DE CARGA/DESCARGA. DESARROLLO DE LOS CONTENIDOS 1. INTRODUCCIÓN. 2. EVOLUCIÓN DE LOS SISTEMAS DE REGULACIÓN. 2.1.
CAPITULO 2: ELEMENTOS Y EQUIPOS TEMA 2.3 El Regulador de carga/descarga 2.3 EL REGULADOR DE CARGA/DESCARGA. DESARROLLO DE LOS CONTENIDOS 1. INTRODUCCIÓN. 2. EVOLUCIÓN DE LOS SISTEMAS DE REGULACIÓN. 2.1.
Las fuentes de alimentación se pueden clasificar de forma general en dos grandes grupos: las fuentes lineales y las conmutadas.
 1. Introducción Una fuente de alimentación es un dispositivo que convierte la corriente alterna, proveniente de la red eléctrica, en corriente continua. Este proceso de transformación se realiza para adecuar
1. Introducción Una fuente de alimentación es un dispositivo que convierte la corriente alterna, proveniente de la red eléctrica, en corriente continua. Este proceso de transformación se realiza para adecuar
M. En C. José Antonio González Moreno Máquinas Térmicas Octubre del 2015
 M. En C. José Antonio González Moreno Máquinas Térmicas Octubre del 2015 En esta presentación se estudiará las características de lo que es y cómo funciona un enfriador de agua o Chiller, así como sus
M. En C. José Antonio González Moreno Máquinas Térmicas Octubre del 2015 En esta presentación se estudiará las características de lo que es y cómo funciona un enfriador de agua o Chiller, así como sus
Fuente de alimentación. Fuente. de Poder. Fuente. de Energía. Mantenimiento de Equipos de Computo 2012-I
 Fuente de alimentación Fuente de Poder Fuente de Energía Qué es una Fuente de poder? FUENTE DE ALIMENTACIÓN FUENTE DE PODER FUENTE DE ENERGÍA Es un dispositivo que se instala internamente en el gabinete
Fuente de alimentación Fuente de Poder Fuente de Energía Qué es una Fuente de poder? FUENTE DE ALIMENTACIÓN FUENTE DE PODER FUENTE DE ENERGÍA Es un dispositivo que se instala internamente en el gabinete
Eficiencia energética en instalaciones de aire acondicionado. José Carlos Caparó Jarufe Ingeniero Mecánico
 Eficiencia energética en instalaciones de aire acondicionado José Carlos Caparó Jarufe Ingeniero Mecánico INTRODUCCIÓN El aire acondicionado se requiere para : Dar confort a las personas Acondicionar espacios
Eficiencia energética en instalaciones de aire acondicionado José Carlos Caparó Jarufe Ingeniero Mecánico INTRODUCCIÓN El aire acondicionado se requiere para : Dar confort a las personas Acondicionar espacios
Podemos plantear un sencillo esquema de alarma como el de la figura: V REF 3600( ) T
 T") Lección 4. MEDIDA DE LA EMPEAUA. Diseñe un sistema de alarma de temperatura utilizando una NC. Deberá activarse cuando la temperatura ascienda por encima de ºC con una exactitud de ºC. Datos: B36K, kω@5ºc,
Lección 4. MEDIDA DE LA EMPEAUA. Diseñe un sistema de alarma de temperatura utilizando una NC. Deberá activarse cuando la temperatura ascienda por encima de ºC con una exactitud de ºC. Datos: B36K, kω@5ºc,
ELECTRONICA GENERAL Y APLICADA-FACULTAD DE INGENIERIA. UNCuyo - Ing. Roberto HAARTH
 Página1 OBJETIVOS Comprender el concepto de rectificación y filtrado de una fuente de alimentación de energía eléctrica. Reconocer las características y parámetros de rectificación de media onda y onda
Página1 OBJETIVOS Comprender el concepto de rectificación y filtrado de una fuente de alimentación de energía eléctrica. Reconocer las características y parámetros de rectificación de media onda y onda
Int. Cl. 6 : A61F 7/08. k 71 Solicitante/s: Federíco Gómez Forrellad. k 72 Inventor/es: Gómez Forrellad, Federíco
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 031 394 21 k Número de solicitud: U 901616 1 k Int. Cl. 6 : A61F 7/08 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 031 394 21 k Número de solicitud: U 901616 1 k Int. Cl. 6 : A61F 7/08 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha de
Producida por. Cargas eléctricas
 Electricidad Producida por Cargas eléctricas Hay de dos tipos Positivas Negativas Un cuerpo las adquiere por Frotamiento Contacto Inducción LEY DE COULOMB La fuerza de atracción o repulsión entre dos objetos
Electricidad Producida por Cargas eléctricas Hay de dos tipos Positivas Negativas Un cuerpo las adquiere por Frotamiento Contacto Inducción LEY DE COULOMB La fuerza de atracción o repulsión entre dos objetos
Para la medida de temperatura se precisa de un contacto directo entre la parte a medir y el instrumento de medida.
 TUTORIAL TERMOPARES Desde luego que uno de los grandes retos del mantenimiento como función empresarial es el control y medida de la temperatura. La causa, se trata de una variable que nos permite detectar
TUTORIAL TERMOPARES Desde luego que uno de los grandes retos del mantenimiento como función empresarial es el control y medida de la temperatura. La causa, se trata de una variable que nos permite detectar
Efecto de los tratamientos térmicos en la circona utilizada como electrolito en las pilas de combustible de óxido sólido. INDICE DEL ANEXO...
 INDICE DEL ANEXO INDICE DEL ANEXO... 80 ANEXO 1... 81 1.1. Diseño del circuito para medición de resistividad eléctrica a partir del método de las 4 puntas.... 81 1.1.1. Objetivo... 81 1.1.2. Introducción...
INDICE DEL ANEXO INDICE DEL ANEXO... 80 ANEXO 1... 81 1.1. Diseño del circuito para medición de resistividad eléctrica a partir del método de las 4 puntas.... 81 1.1.1. Objetivo... 81 1.1.2. Introducción...
T7 CICLOS DE REFRIGERACION
 1.- Introducción 2.- Refrigeración por compresión 3.- Refrigeración por absorción 4.- Bombas de calor 5.- Otros ciclos de refrigeración 1.- Introducción ; Son máquinas térmicas inversas Son ciclos en los
1.- Introducción 2.- Refrigeración por compresión 3.- Refrigeración por absorción 4.- Bombas de calor 5.- Otros ciclos de refrigeración 1.- Introducción ; Son máquinas térmicas inversas Son ciclos en los
Realizado: Versión: Páginas: Grupo SUPPRESS. Laboratorio Remoto de Automática (LRA-ULE) Universidad de León
 Universidad de León") Realizado: Grupo SUPPRESS (Supervisión, Control y Automatización) Laboratorio Remoto de Automática (LRA-ULE) Universidad de León http://lra.unileon.es Versión: Páginas: 1.0 12 0. Introducción Para llevar
Realizado: Grupo SUPPRESS (Supervisión, Control y Automatización) Laboratorio Remoto de Automática (LRA-ULE) Universidad de León http://lra.unileon.es Versión: Páginas: 1.0 12 0. Introducción Para llevar
6- TIPOS DE CONTROL UTILIZADOS
 6- TIPOS DE CONTROL UTILIZADOS 6.1 Control manual Dado un proceso de cualquier tipo y una actuación sobre el mismo que provoque un efecto, se define como control manual o en lazo abierto a la forma de
6- TIPOS DE CONTROL UTILIZADOS 6.1 Control manual Dado un proceso de cualquier tipo y una actuación sobre el mismo que provoque un efecto, se define como control manual o en lazo abierto a la forma de
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
 PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ FACULTAD DE CIENCIAS E INGENIERÍA ANEXOS DISEÑO DEL SUBSISTEMA MECÁNICO - ELÉCTRICO PARA UN SISTEMA DE CONTROL DE TEMPERATURA DE UN TANQUE Tesis para optar el Título
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ FACULTAD DE CIENCIAS E INGENIERÍA ANEXOS DISEÑO DEL SUBSISTEMA MECÁNICO - ELÉCTRICO PARA UN SISTEMA DE CONTROL DE TEMPERATURA DE UN TANQUE Tesis para optar el Título
Funcionamiento de las Bombas de Calor Aerotérmicas
 Funcionamiento de las Bombas de Calor Aerotérmicas Introducción Para entender cómo funcionan las Bombas de Calor Aerotérmicas, es necesario por un lado conocer el concepto de Aerotermia, y por otro los
Funcionamiento de las Bombas de Calor Aerotérmicas Introducción Para entender cómo funcionan las Bombas de Calor Aerotérmicas, es necesario por un lado conocer el concepto de Aerotermia, y por otro los
XVI.- INTERCAMBIADORES DE CALOR MÉTODO DE LA EFICIENCIA
 XVI.- INTERCAMBIADORES DE CALOR MÉTODO DE LA EFICIENCIA XVI..- EFICACIA DE LOS INTERCAMBIADORES DE CALOR En muchas situaciones lo único que se conoce es la descripción física del intercambiador, como el
XVI.- INTERCAMBIADORES DE CALOR MÉTODO DE LA EFICIENCIA XVI..- EFICACIA DE LOS INTERCAMBIADORES DE CALOR En muchas situaciones lo único que se conoce es la descripción física del intercambiador, como el
TEMA 3: CIRCUITO FRIGORÍFICO. BOMBA DE CALOR
 TEMA 3: CIRCUITO FRIGORÍFICO. BOMBA DE CALOR 1. Introducción a. Ecuación de los gases perfectos b. Principios de la termodinámica y ley de Joule de los gases ideales 2. Principio de funcionamiento de los
TEMA 3: CIRCUITO FRIGORÍFICO. BOMBA DE CALOR 1. Introducción a. Ecuación de los gases perfectos b. Principios de la termodinámica y ley de Joule de los gases ideales 2. Principio de funcionamiento de los
Serie de Fundamentos de Mediciones con Sensores. ni.com
 Serie de Fundamentos de Mediciones con Sensores Fundamentos de Adquisición de Datos Anjelica Warren Gerente de productos National Instruments Qué es la adquisición de datos (DAQ)? 3 Por qué realizar mediciones?
Serie de Fundamentos de Mediciones con Sensores Fundamentos de Adquisición de Datos Anjelica Warren Gerente de productos National Instruments Qué es la adquisición de datos (DAQ)? 3 Por qué realizar mediciones?
Manual Técnico ENSAYO DE CALENTAMIENTO EN BOBINADO DE BALASTOS
 ENSAYO DE CALENTAMIENTO EN BOBINADO DE BALASTOS. INTRODUCCIÓN Una de las características técnicas más importantes en un balasto destinado a incorporarse en una luminaria, la constituye el valor de temperatura
ENSAYO DE CALENTAMIENTO EN BOBINADO DE BALASTOS. INTRODUCCIÓN Una de las características técnicas más importantes en un balasto destinado a incorporarse en una luminaria, la constituye el valor de temperatura
ENERGÍAS ALTERNATIVAS. SOLAR Y EÓLICA
 Objetivos del Curso: SOLAR TÉRMICA: - Estudiar los principios fundamentales de funcionamiento de un sistema de aprovechamiento de la energía solar térmica. - Determinar los elementos integrantes de una
Objetivos del Curso: SOLAR TÉRMICA: - Estudiar los principios fundamentales de funcionamiento de un sistema de aprovechamiento de la energía solar térmica. - Determinar los elementos integrantes de una
Medición de la Conductividad
 Medición de la Conductividad 1.1. Introducción Las soluciones de la Ley de Fourier en su formulación diferencial, empleando las condiciones de borde adecuadas, permite resolver el problema de conducción
Medición de la Conductividad 1.1. Introducción Las soluciones de la Ley de Fourier en su formulación diferencial, empleando las condiciones de borde adecuadas, permite resolver el problema de conducción
CAPITULO 3 IMPLEMENTACIÓN DEL INVERSOR ELEVADOR. En el presente capítulo se muestran, de manera general, la etapa de potencia y de
 CAPITULO 3 IMPLEMENTACIÓN DEL INVERSOR ELEVADOR MONO - ETAPA 3.1 Introducción En el presente capítulo se muestran, de manera general, la etapa de potencia y de control de conmutación implementadas. Se
CAPITULO 3 IMPLEMENTACIÓN DEL INVERSOR ELEVADOR MONO - ETAPA 3.1 Introducción En el presente capítulo se muestran, de manera general, la etapa de potencia y de control de conmutación implementadas. Se
PRINCIPIOS DE SERVOSISTEMAS
 PRINCIPIOS DE SERVOSISTEMAS Hoy en día los sistemas de control constituyen la base de todo proceso industrial y automatización en general, siendo su finalidad proporcionar una respuesta adecuada a un estímulo
PRINCIPIOS DE SERVOSISTEMAS Hoy en día los sistemas de control constituyen la base de todo proceso industrial y automatización en general, siendo su finalidad proporcionar una respuesta adecuada a un estímulo
Estudio de Rectificadores Trifásicos
 OpenCourseWare de la Universidad del País Vasco / Euskal Herriko Unibertsitatea http://ocw.ehu.es Estudio de Rectificadores Trifásicos 1.- Presentación e introducción a los rectificadores trifásicos con
OpenCourseWare de la Universidad del País Vasco / Euskal Herriko Unibertsitatea http://ocw.ehu.es Estudio de Rectificadores Trifásicos 1.- Presentación e introducción a los rectificadores trifásicos con
Controlador electrónico quemadores pellets
 Controlador electrónico quemadores pellets NPBC-V3M Manual Técnico / Versión 2.2 Página 1 de 11 Manual Técnico / Versión 2.2 Página 2 de 11 INTRODUCTION NPBC-V3M es un regulador avanzado, funcionalmente
Controlador electrónico quemadores pellets NPBC-V3M Manual Técnico / Versión 2.2 Página 1 de 11 Manual Técnico / Versión 2.2 Página 2 de 11 INTRODUCTION NPBC-V3M es un regulador avanzado, funcionalmente
La solución eficiente que suma las ventajas de los Rear Rack coolers y los sistemas de expansión directa. DX REAR RACK COOLERS Heat removal at source
 DX REAR RACK COOLERS Heat removal at source La solución eficiente que suma las ventajas de los Rear Rack coolers y los sistemas de expansión directa. Type DX R-R. Sales catalogue C003/SP/2016. focuscooling.
DX REAR RACK COOLERS Heat removal at source La solución eficiente que suma las ventajas de los Rear Rack coolers y los sistemas de expansión directa. Type DX R-R. Sales catalogue C003/SP/2016. focuscooling.
INSTRUMENTACION INDUSTRIAL MEDIDAS DE TEMPERATURAS ING. CIPRIAN GARCIA MARQUEZ
 INSTRUMENTACION INDUSTRIAL MEDIDAS DE TEMPERATURAS ING. CIPRIAN GARCIA MARQUEZ LAS MEDICION DE TEMPERATURAS ESTA PRESENTE EN TODOS LOS PROCESOS INDUSTRIALES Termómetros industriales: Los termómetros más
INSTRUMENTACION INDUSTRIAL MEDIDAS DE TEMPERATURAS ING. CIPRIAN GARCIA MARQUEZ LAS MEDICION DE TEMPERATURAS ESTA PRESENTE EN TODOS LOS PROCESOS INDUSTRIALES Termómetros industriales: Los termómetros más
Disfruta del agua caliente con AQUATERMIC HEATANK
 Disfruta del agua caliente con AQUATERMIC HEATANK AQUATERMIC HEATANK es uno de los sistemas más económicos y respetuosos con el medio ambiente que existen para obtener agua caliente sanitaria. Utiliza
Disfruta del agua caliente con AQUATERMIC HEATANK AQUATERMIC HEATANK es uno de los sistemas más económicos y respetuosos con el medio ambiente que existen para obtener agua caliente sanitaria. Utiliza
ENERGIAS DE LIBRE DISPOSICION
 Térmica -Energía Solar La energía solar térmica aprovecha directamente la energía emitida por el sol. Su calor es recogido en colectores líquidos o de gas que son expuestos a la radiación solar absorbiendo
Térmica -Energía Solar La energía solar térmica aprovecha directamente la energía emitida por el sol. Su calor es recogido en colectores líquidos o de gas que son expuestos a la radiación solar absorbiendo
Sonda térmica de aire del interior (B10/4), serie 219 hasta 06/2006
, serie 219 hasta 06/2006") Motor del soplador (A32m1)/regulador del soplador (A32n1) Disposición: El motor del soplador (A32m1) y el regulador del soplador (A32n1) se encuentran debajo de la guantera, en la caja del aire acondicionado.
Motor del soplador (A32m1)/regulador del soplador (A32n1) Disposición: El motor del soplador (A32m1) y el regulador del soplador (A32n1) se encuentran debajo de la guantera, en la caja del aire acondicionado.
Unidad 12. Circuitos eléctricos de corriente continua
 Unidad 12. Circuitos eléctricos de corriente continua 1. El circuito eléctrico 2. Magnitudes eléctricas 3. Elementos de un circuito 4. Resolución de problemas complejos 5. Distribución de la energía eléctrica
Unidad 12. Circuitos eléctricos de corriente continua 1. El circuito eléctrico 2. Magnitudes eléctricas 3. Elementos de un circuito 4. Resolución de problemas complejos 5. Distribución de la energía eléctrica
Introducción a los Sistemas de Control
 Introducción a los Sistemas de Control Organización de la presentación - Introducción a la teoría de control y su utilidad - Ejemplo simple: modelado de un motor de continua que mueve una cinta transportadora.
Introducción a los Sistemas de Control Organización de la presentación - Introducción a la teoría de control y su utilidad - Ejemplo simple: modelado de un motor de continua que mueve una cinta transportadora.
APUNTE: EL TRANSFORMADOR
 APUNTE: EL TRANSFORMADOR Área de EET Página 1 de 6 Derechos Reservados Titular del Derecho: INACAP N de inscripción en el Registro de Propiedad Intelectual #. de fecha - -. INACAP 2002. Página 2 de 6 INDICE
APUNTE: EL TRANSFORMADOR Área de EET Página 1 de 6 Derechos Reservados Titular del Derecho: INACAP N de inscripción en el Registro de Propiedad Intelectual #. de fecha - -. INACAP 2002. Página 2 de 6 INDICE
MODELADO Y CONTROL DE UN BRAZO ROBÓTICO SCARA CONSTRUÍDO CON LEGO. Entidad colaboradora: ICAI Universidad Pontificia Comillas
 Resumen MODELADO Y CONTROL DE UN BRAZO ROBÓTICO SCARA CONSTRUÍDO CON LEGO Autor: de Gracia Fernández, Ramón Directores: Zamora Macho, Juan Luis Porras Galán, José Entidad colaboradora: ICAI Universidad
Resumen MODELADO Y CONTROL DE UN BRAZO ROBÓTICO SCARA CONSTRUÍDO CON LEGO Autor: de Gracia Fernández, Ramón Directores: Zamora Macho, Juan Luis Porras Galán, José Entidad colaboradora: ICAI Universidad
TEMA 3: APLICACIÓN INDUSTRIAL DE LOS INVERSORES: ACCIONAMIENTO PARA UNA MÁQUINA DE CORRIENTE ALTERNA. F. Javier Maseda
 TEMA 3: APLICACIÓN INDUSTRIAL DE LOS INVERSORES: ACCIONAMIENTO PARA UNA MÁQUINA DE CORRIENTE ALTERNA DEPARTAMENTO DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA SISTEMEN INGENIARITZA ETA AUTOMATIKA SAILA 2 Objetivos
TEMA 3: APLICACIÓN INDUSTRIAL DE LOS INVERSORES: ACCIONAMIENTO PARA UNA MÁQUINA DE CORRIENTE ALTERNA DEPARTAMENTO DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA SISTEMEN INGENIARITZA ETA AUTOMATIKA SAILA 2 Objetivos
APLICACIÓN Y DISEÑO DE SISTEMAS VRF
 APLICACIÓN Y DISEÑO DE SISTEMAS VRF 1. Introducción VRF 2. Ventajas 3. Antecedentes 4. Avances tecnológicos 5. Tecnologías actuales 6. Aplicaciones 7. Nuevas tendencias 8. Ejemplo de Diseño 2 Introducción
APLICACIÓN Y DISEÑO DE SISTEMAS VRF 1. Introducción VRF 2. Ventajas 3. Antecedentes 4. Avances tecnológicos 5. Tecnologías actuales 6. Aplicaciones 7. Nuevas tendencias 8. Ejemplo de Diseño 2 Introducción
TELECONTROL Y AUTOMATISMOS
 TELECONTROL Y AUTOMATISMOS ACONDIDIONADORES DE SEÑAL 4. Acondicionamiento de Señal. La señal de salida de un sistema de medición en general se debe procesar de una forma adecuada para la siguiente etapa
TELECONTROL Y AUTOMATISMOS ACONDIDIONADORES DE SEÑAL 4. Acondicionamiento de Señal. La señal de salida de un sistema de medición en general se debe procesar de una forma adecuada para la siguiente etapa
RESUMEN TEMA 12: SISTEMAS AUTOMÁTICOS Y DE CONTROL
 RESUMEN TEMA 12: SISTEMAS AUTOMÁTICOS Y DE CONTROL 1.-INTRODUCCIÓN: Un sistema de control es un conjunto de componentes físicos conectados o relacionados entre sí, de manera que regulen o dirijan una acción
RESUMEN TEMA 12: SISTEMAS AUTOMÁTICOS Y DE CONTROL 1.-INTRODUCCIÓN: Un sistema de control es un conjunto de componentes físicos conectados o relacionados entre sí, de manera que regulen o dirijan una acción
TEMA 2: LOS CIRCUITOS ELÉCTRICOS
 TEMA 2: LOS CIRCUITOS ELÉCTRICOS T E C N O L O G Í A - 3 º E S O LA ELECTRICIDAD QUÉ ES LA ELECTRICIDAD? CORRIENTE ELÉCTRICA La corriente eléctrica es el desplazamiento de los electrones por el interior
TEMA 2: LOS CIRCUITOS ELÉCTRICOS T E C N O L O G Í A - 3 º E S O LA ELECTRICIDAD QUÉ ES LA ELECTRICIDAD? CORRIENTE ELÉCTRICA La corriente eléctrica es el desplazamiento de los electrones por el interior
OPERACIONES UNITARIAS
 OPERACIONES UNITARIAS 2016 TEMA 2 - CALOR INTRODUCCION MECANISMOS DE TRANSFERENCIA DE CALOR Prácticamente en todas las operaciones que realiza el ingeniero interviene la producción o absorción de energía
OPERACIONES UNITARIAS 2016 TEMA 2 - CALOR INTRODUCCION MECANISMOS DE TRANSFERENCIA DE CALOR Prácticamente en todas las operaciones que realiza el ingeniero interviene la producción o absorción de energía
Sistemas de refrigeración: compresión y absorción
 Sistemas de refrigeración: compresión y absorción La refrigeración es el proceso de producir frío, en realidad extraer calor. Para producir frío lo que se hace es transportar calor de un lugar a otro.
Sistemas de refrigeración: compresión y absorción La refrigeración es el proceso de producir frío, en realidad extraer calor. Para producir frío lo que se hace es transportar calor de un lugar a otro.
Diseño de reguladores PID.
 Universidad Carlos III de Madrid Departamento de Ingeniería de Sistemas y Automática Área de Ingeniería de Sistemas y Automática SEÑALES Y SISTEMAS Práctica 3 Diseño de reguladores PID. 1 Introducción
Universidad Carlos III de Madrid Departamento de Ingeniería de Sistemas y Automática Área de Ingeniería de Sistemas y Automática SEÑALES Y SISTEMAS Práctica 3 Diseño de reguladores PID. 1 Introducción
No, ya que existen perdidas, pudiendo hacer tal conexionado en un transformador ideal.
 1. Un transformador de tensión es reversible. Si se toman dos transformadores idénticos de 230/12 V y si conectan los dos secundarios entre si y uno de los primarios se conecta a una toma de tensión, En
1. Un transformador de tensión es reversible. Si se toman dos transformadores idénticos de 230/12 V y si conectan los dos secundarios entre si y uno de los primarios se conecta a una toma de tensión, En
AUDITORÍAS ENERGÉTICAS EN LOS EDIFICIOS
 AUDITORÍAS ENERGÉTICAS EN LOS EDIFICIOS Francisco J. Aguilar Valero faguilar@umh.es Grupo de Ingeniería Energética Departamento de Ingeniería Mecánica y Energía UNIVERSIDAD MIGUEL HERNÁNDEZ EFICIENCIA
AUDITORÍAS ENERGÉTICAS EN LOS EDIFICIOS Francisco J. Aguilar Valero faguilar@umh.es Grupo de Ingeniería Energética Departamento de Ingeniería Mecánica y Energía UNIVERSIDAD MIGUEL HERNÁNDEZ EFICIENCIA
Otras Alternativas con Gas Natural Bomba de Calor a Gas (GHP) Microgeneración
 Microgeneración") Otras Alternativas con Gas Natural Bomba de Calor a Gas (GHP) Microgeneración 61 Bomba de Calor a Gas 62 BOMBA DE CALOR A GAS CON RECUPERACIÓN DE CALOR PARA A.C.S. CIRCUITO A.C.S. CIRCUITO DE CLIMATIZACIÓN
Otras Alternativas con Gas Natural Bomba de Calor a Gas (GHP) Microgeneración 61 Bomba de Calor a Gas 62 BOMBA DE CALOR A GAS CON RECUPERACIÓN DE CALOR PARA A.C.S. CIRCUITO A.C.S. CIRCUITO DE CLIMATIZACIÓN
XVIII.- INTERCAMBIADORES DE CALOR MÉTODO DE LA EFICIENCIA
 XVIII.- INTERCAMBIADORES DE CALOR MÉTODO DE LA EFICIENCIA XVIII..- EFICACIA DE LOS INTERCAMBIADORES DE CALOR En muchas situaciones lo único que se conoce es la descripción física del intercambiador, como
XVIII.- INTERCAMBIADORES DE CALOR MÉTODO DE LA EFICIENCIA XVIII..- EFICACIA DE LOS INTERCAMBIADORES DE CALOR En muchas situaciones lo único que se conoce es la descripción física del intercambiador, como
CURSO DE REFRIGERACION
 CURSO DE REFRIGERACION AIRE ACONDICIONADO PROF. CARLOS MARQUEZ Y PABLO BIANCHI AIRE ACONDICIONADO Podemos decir que la función de un equipo de aire acondicionado es la realización de tareas que estén destinadas
CURSO DE REFRIGERACION AIRE ACONDICIONADO PROF. CARLOS MARQUEZ Y PABLO BIANCHI AIRE ACONDICIONADO Podemos decir que la función de un equipo de aire acondicionado es la realización de tareas que estén destinadas
Proyecto de tesis de grado:
 CARRERA DE INGENIERÍA EN ELECTRÓNICA E INTRUMENTACIÓN Proyecto de tesis de grado: TEMA: DISEÑO E IMPLEMENTACIÓN DE UN ALGORITMO DE CONTROL AVANZADO APLICADO A UN PROCESO DE PRESIÓN, UTILIZANDO UN CONTROLADOR
CARRERA DE INGENIERÍA EN ELECTRÓNICA E INTRUMENTACIÓN Proyecto de tesis de grado: TEMA: DISEÑO E IMPLEMENTACIÓN DE UN ALGORITMO DE CONTROL AVANZADO APLICADO A UN PROCESO DE PRESIÓN, UTILIZANDO UN CONTROLADOR
Física 2 Biólogos y Geólogos. Termometría-Sensores de temperatura
 Física 2 Biólogos y Geólogos Curso de Verano 2007 Guía de laboratorio N 8 Termometría-Sensores de temperatura Objetivos Estudiar las características básicas de diferentes termómetros y sensores de temperatura.
Física 2 Biólogos y Geólogos Curso de Verano 2007 Guía de laboratorio N 8 Termometría-Sensores de temperatura Objetivos Estudiar las características básicas de diferentes termómetros y sensores de temperatura.
Proyecto fin de carrera
 ----------------------------- UNIVERSIDAD CARLOS III MADRID ----------------------------- Ingeniería Industrial: Especialidad Electrónica Diseño, simulación y construcción de un convertidor elevador corrector
----------------------------- UNIVERSIDAD CARLOS III MADRID ----------------------------- Ingeniería Industrial: Especialidad Electrónica Diseño, simulación y construcción de un convertidor elevador corrector