Análisis de imágenes digitales
|
|
|
- María Luisa Martin Gallego
- hace 6 años
- Vistas:
Transcripción


1 Análisis de imágenes digitales FILTRADO DE LA IMAGEN Operadores morfológicos
2 INTRODUCCIÓN La palabra morfología comúnmente denota una rama de la biología que trata de la forma y estructuras de plantas y animales. En el contexto de análisis de imágenes, se denota morfología matemática (MM) al conjunto de herramientas utilizadas para extraer componentes de la imagen que son útiles en la representación y descripción de la forma de los objetos. El análisis morfológico se puede utilizar para: Preprocesamiento de la imagen: filtrado de ruido, simplificación de formas. Mejoramiento de la estructura de los objetos: esqueletos, adelgazamiento, engrosamiento, polígonos convexos. Segmentación de objetos de su fondo. Descripción cuantitativa de objetos: área, perímetro, proyecciones. 2




3 INTRODUCCIÓN Remoción de estructuras Reducción de ruido Corrección de iluminación Detección de bordes Segmentación de regiones 3
4 INTRODUCCIÓN La MM explota las propiedades de los conjuntos, los cuales representan los objetos planos en la imagen dentro de un espacio euclidiano bidimensional. Sea A un conjunto en Z 2 cuyos elementos tienen coordenadas (x,y). Si w = (x,y) es un elemento de A, entonces se escribe w A. De forma similar, si w no es un elemento de A se escribe w A. Un conjunto A de píxeles que satisface una condición particular se escribe A={w condición}. Por ejemplo, un conjunto de píxeles que no pertenecen al conjunto A, i.e., el complemento de A denotado como A c, está dado por A c ={w w A}. La unión y la intersección entre dos conjuntos A y B se denotan como A B y A B, respectivamente. La diferencia de dos conjuntos A y B, es el conjunto de elementos que pertenecen a A y no a B expresado como A B ={w w A, w B}. 4





z, se define como (A)z = {c c")
5 INTRODUCCIÓN Adicionalmente, a las operaciones básicas anteriores, las operaciones morfológicas requieren dos operadores que son específicos para los conjuntos cuyos elementos son píxeles: La reflexión de un conjunto A se define como  ={w w a, a A}. La traslación de un conjunto A al punto z = (z, z2), denotado (A)z, se define como (A)z = {c c a+z, a A}. A A B A B z B  z 2 A c A B A (A) z 5
6 INTRODUCCIÓN Una transformación u operador ΨΨ se define como un mapeo de la forma: es decir, la transformación ΨΨ toma una función bidimensional y la transforma en otra función bidimensional. Una transformación ΨΨ es extensiva si y sólo si para todo conjunto A, A ΨΨ(A). Análogamente, una transformación ΨΨ es anti-extensiva si y sólo si para todo conjunto A, A ΨΨ(A). Ψ :R 2 R 2 Una transformación ΨΨ es incremental si preserva la relación de orden entre conjuntos tal que A,B, A B ΨΨ(A) ΨΨ(B). Una transformación ΨΨ es idempotente si se aplica dos veces en cualquier conjunto A es equivalente a aplicarlo una sóla vez, esto es, ΨΨ(A) = ΨΨ(ΨΨ(A)). 6
7 ELEMENTO ESTRUCTURANTE Una transformación morfológica ΨΨ es una operación no lineal dada por la relación de un conjunto de puntos A (objetos en la imagen) con un conjunto menor de puntos B (elemento estructurante, EE). B es expresado con respecto a un origen local y posee una forma y tamaños definidos de acuerdo a las estructuras que se quieren analizar en A. Origen Válidos Ignorados Aplicar la transformación ΨΨ(A) a la imagen A significa que el EE B se desplaza sistemáticamente a través de toda la imagen (operación de enmascaramiento), donde el origen de B se posiciona sobre un píxel de la imagen que se desea transformar y se aplica la relación entre A y B en esa posición. 7
8 OPERADORES MORFOLÓGICOS Las operaciones morfológicas se pueden dividir en dos categorías de acuerdo al tipo de imagen:. Binárias: cuando un píxel se ve afectado por la operación será sustituído por su valor opuesto (complemento). 2. En escala de grises: un píxel se modifica por el valor de intensidad de sus vecinos. Erosión y dilatación representan los operadores morfológicos primarios, y de ambos operadores se derivan otras operaciones más complejas como apertura, cerradura y descomposición de formas. La dualidad de las operaciones morfológicas indica que para cada transformación ΨΨ(A) existe una transformación dual ΨΨ * (A): ΨΨ(A) = [ΨΨ * (A c )] c. Esto significa que una erosión puede describirse en términos de una dilatación y viceversa. 8
9 EROSIÓN BINARIA La erosión de un conjunto A con un elemento estructurante B se define como el conjunto de todos los puntos z tales que B, trasladado por z, es un subconjunto de A, esto es, B no comparte ningún elemento en común con el fondo de A: A! B = { z (B) z A} = { z (B) z A c = } B A B A B A A! B A = B = Imagen erosionada B A 9 B A A! B B A
10 EROSIÓN BINARIA La erosión de un conjunto A con un elemento estructurante B se define como el conjunto de todos los puntos z tales que B, trasladado por z, es un subconjunto de A, esto es, B no comparte ningún elemento en común con el fondo de A: A c = B = A! B = { z (B) z A} = { z (B) z A c = } B A B A B A = A! B Imagen erosionada B A = B A = A! B B A

11 EROSIÓN BINARIA d d 4 d A B d 4 A! B d 4 d 8 3d 4 d 8 A! B d 2 d d 2 B d 8 3d 4 d 8


12 EROSIÓN BINARIA EE tamaño lineal 9º cuadrado circular rombo original 5 7 2
13 DILATACIÓN BINARIA La dilatación de un conjunto A con un elemento estructurante B se define como el conjunto de todos los desplazamientos, z, tales que A y B se traslapan en el origen de B como: { } = { z ( ˆB) z A } A B = z [( ˆB) z A] A ˆB A = ˆB A = ˆB A A B A = ˆB = Imagen dilatada ˆB A ˆB A A B ˆB A A B 3

14 DILATACIÓN BINARIA d d A d 4 d 4 B = ˆB A B d 8 3d 4 d 8 d 4 d 2 d A B d B = ˆB d 2 d 8 d d 8 4


15 DILATACIÓN BINARIA EE tamaño lineal 9º cuadrado circular rombo original 5 7 5
16 EROSIÓN EN ESCALA DE GRISES La erosión de un imagen f(x,y) en escala de grises con un EE b se define como el valor mínimo de la región que enmascara b cuando su origen está sobre el píxel (x,y) (visto anteriormente como filtro min): [ f!b](x,y) = min (s,t ) b { f (x + s,y + t) } b = f = Imagen erosionada

17 EROSIÓN EN ESCALA DE GRISES EE tamaño lineal 45º cuadrado circular rombo original 5 7 7
18 DILATACIÓN EN ESCALA DE GRISES La dilatación de un imagen f(x,y) en escala de grises con un EE b se define como el valor máximo de la región que cubre b cuando su origen está sobre el píxel (x,y) (visto anteriormente como filtro max): [ f b](x,y) = max{ f (x s,y t) } (s,t ) b ˆb = Imagen dilatada f =

19 DILATACIÓN EN ESCALA DE GRISES EE tamaño lineal 45º cuadrado circular rombo original 5 7 9

 [ f!")
20 DUALIDAD Un operador morfológico primario puede ser descrito en términos de otro y viceversa: [ f b] c = ( f c! ˆb ) [ f!b] c = ( f c ˆb ) 2
 ˆb f (x,y) ( f!b) ˆb ( f ˆb)!")
21 DUALIDAD Debido a que las operaciones morfológicas son transformaciones no lineales, la erosión NO es el inverso de la dilatación, ni viceversa, de modo que la imagen original nunca se recupera: ( f!b) ˆb f (x,y) ( f!b) ˆb ( f ˆb)!b Original ( f ˆb)!b 2
22 TRANSFORMACIÓN HIT-OR-MISS La transformación hit-or-miss es un operador morfológico que encuentra patrones locales de píxeles que coinciden con el tamaño y la forma de un elemento estructurante compuesto de un par de conjuntos disjuntos B = (B, B2). La transformación hit-or-miss se define como: A B = { a B A, B 2 A c } donde B es el conjunto de elementos asociados con un objeto y B2 es el conjunto de elementos asociados con su correspondiente fondo. Esta transformación se implementa en términos de erosiones como: A B = (A! B ) (A c! B 2 ) 22

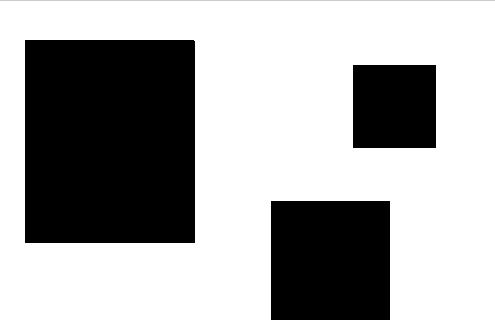

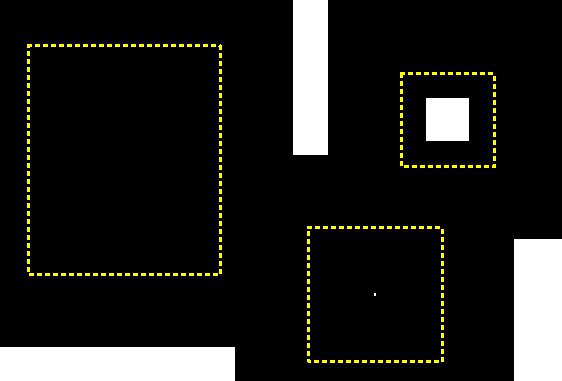
23 TRANSFORMACIÓN HIT-OR-MISS A A c B B 2 A! B A c! B 2 A B 23



24 TRANSFORMACIÓN HIT-OR-MISS EE compuesto con la palabra deseada A B B 2 A B 24



 B A B = ( A B)!")

25 APERTURA Y CERRADURA La apertura de un conjunto A con un elemento estructurante B es la erosión de A con B, seguido de una dilatación del resultado con B como: A B A! B = ( A! B) B La cerradura de un conjunto A con un elemento estructurante B es la dilatación de A con B, seguido de una erosión del resultado con B como: A! B A! B (A! B) B A B = ( A B)! B La apertura suaviza el contorno de los objetos, elimina protuberancias y abre canales, mientras que la cerradura elimina pequeños orificios, fusiona brechas y alarga pequeñas entradas. 25 A B A B (A B)! B


!")
26 APERTURA Y CERRADURA Original A! B A! B = (A! B) B A B A B = (A B)! B 26




27 APERTURA Y CERRADURA Original A B (A B) B A B (A B) B 27
 B = A B Original A B (A B) B Dualidad: la apertura es dual a la cerradura y viceversa. Original A B (A B) c ( A B) c = (A c! B) ( A! B) c = (A c B) A c (A c! B) 28")
28 APERTURA Y CERRADURA Idempotencia: la respuesta de la imagen transformada no cambia si se aplica más de una vez la operación morfológica usando el mismo EE. ( A! B)! B = A! B ( A B) B = A B Original A B (A B) B Dualidad: la apertura es dual a la cerradura y viceversa. Original A B (A B) c ( A B) c = (A c! B) ( A! B) c = (A c B) A c (A c! B) 28
29 FILTROS MORFOLÓGICOS La idea básica de los filtros morfológicos es suprimir selectivamente estructuras indeseadas en la imagen. Las propiedades de una transformación idempotente e incremental son suficientes para que el operador morfológico ΨΨ sea un filtro morfológico. Consecuentemente, la cerradura es un filtro morfológico extensivo y la apertura es un filtro morfológico anti-extensivo. Con la adecuada selección de la forma y tamaño del elemento estructurante se puede construir un filtro morfológico que remueva de la imagen estructuras de acuerdo a su tamaño, orientación y forma. Filtros morfológicos más complejos pueden ser diseñados combinando las respuestas de los filtros básicos de apertura y cerradura de manera paralela o secuencial. 29


 de cerraduras es una cerradura.")
30 FILTROS MORFOLÓGICOS La combinación paralela se utiliza generalmente para filtrar estructuras direccionales de la imagen utilizando elementos estructurantes lineales con diferentes orientaciones de manera independiente y después unir sus respuestas:. La unión (máximo puntual) de aperturas es una apertura. 2. La intersección (mínimo puntual) de cerraduras es una cerradura. Apertura con EE vertical Apertura con EE horizontal 3

31 FILTROS MORFOLÓGICOS Cuando la imagen está corrompida con ruido, se puede utilizar una combinación secuencial de una apertura ( γ ) seguida de una cerradura ( φ ) o viceversa, cuyo orden dependerá del contraste local de los objetos en la imagen. Un filtro morfológico secuencial puede construirse mediante las siguientes combinaciones γφ, φγ, γφγ, y φγφ. Dado que γ φ, las siguientes relaciones de orden siempre se satisfacen: γ γφγ γφ φγ φγφ φ de modo que los filtros duales apertura-cerradura y cerraduraapertura tienen efectos similares, aunque no son equivalentes. 3 γ φ γ φ

32 FILTROS MORFOLÓGICOS Filtrado morfológico de una imagen binaria: Imagen ruidosa Apertura con EE 3 3 Cerradura con EE 3 3 Apertura- Cerradura con EE


33 FILTROS MORFOLÓGICOS Filtrado morfológico de una imagen en escala de grises: Imagen con ruido impulsivo Apertura con EE 3 3 Cerradura con EE 3 3 Apertura- Cerradura con EE
, un")

34 FILTROS MORFOLÓGICOS Cuando el nivel de ruido es alto en el sentido en que contiene estructuras sobre un rango amplio de escalas (tamaños), un simple filtro γφ ó φγ con un elemento estructurante grande no da resultados aceptables. Nivel de ruido alto 34 Apertura seguida de cerradura con EE 7 7
35 FILTROS MORFOLÓGICOS Para resolver este problema se alternan aperturas y cerraduras, comenzando con un pequeño elemento estructurante y aumentando gradualmente su tamaño de manera iterativa hasta un tamaño deseado. A esta combinación secuencial e iterativa de apertura-cerradura o viceversa se le conoce como filtro secuencial alternado (ASF): (γφ) i, (φγ) i, (φγφ) i, (γφγ) i. Los filtros ASF satisfacen las siguientes relaciones para dos iteraciones i y j: i j ASF j ASF i = ASF j y ASF i ASF j ASF j El resultado final dependerá de cuál filtro morfológico se utilice primero, si una apertura o una cerradura. 35

36 FILTROS MORFOLÓGICOS Imagen ruidosa (φγ) con EE 3 3 (φγ)2 con EE (φγ)3 con EE 7 7
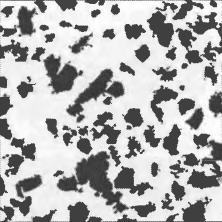
37 TOP-HAT MORFOLÓGICO La selección de un filtro morfológico dependerá del conocimiento a priori que se tenga de la forma, tamaño y orientación de las estructuras que se quieren remover. Por ejemplo, para remover ruido impulsivo se aplica un filtro secuencial con un elemento estructurante de tamaño mucho menor al de los objetos relevantes en la imagen. En el caso del top-hat morfológico el filtrado funciona al contrario, es decir, se deben remover las estructuras relevantes y recuperarlas posteriormente con una substracción de imágenes. El top-hat puede ser blanco (WTH) o negro (BTH) definidos como: WTH B ( f ) = f γ B ( f ) y BTH B ( f ) = φ B ( f ) f donde B es el elemento estructurante de tamaño mayor a los objetos relevantes. 37
38 TOP-HAT MORFOLÓGICO Un uso común de los operadores top-hat es la corrección de iluminación en imágenes. En ocasiones, al obtener una imagen existe un gradiente de iluminación que provoca una no uniformidad de intensidad en el fondo, es decir, algunas regiones de son más oscuras, mientras que otras son más brillosas. Región brillosa Entonces, un top-hat con un elemento estructurante isotrópico grande actua como un filtro pasa bajas, ya que los gradientes de iluminación corresponden a componentes de baja frecuencia. Los WTH se usan para imágenes con fondo oscuro, mientras que los BTH para fondos brillosos. 38 Región oscura


39 TOP-HAT MORFOLÓGICO Corrección de iluminación con top-hat blanco: + Imagen con iluminación no uniforme γ B Imagen con iluminación corregida 39



40 TOP-HAT MORFOLÓGICO Cuando el contraste entre los objetos y el fondo decrece gradualmente, haciendose el fondo muy oscuro, una mejor opción de corrección es dividir la imagen original entre su cerradura (o apertura). Imagen con iluminación no uniforme Cerradura con EE grande φb ( f ) f f φb ( f ) 4
 = f + WTH B ( f ) BTH B")
41 TOP-HAT MORFOLÓGICO El contraste de una imagen se puede mejorar calculando independientemente el WTH y BTH de una imagen. El WTH se suma a la imagen original para mejorar las regiones brillantes y el BTH se resta de la imagen resultante para mejorar las regiones oscuras: κ BTH ( f ) = f + WTH B ( f ) BTH B ( f ) = 3 f φb ( f ) γ B ( f ) Imagen original Imagen mejorada 4





 = ( f B) (")
42 DETECCIÓN DE BORDES El gradiente es una operación que detecta los cambios más acentuaduados de los niveles de gris que normalmente caracterizan a los bordes de los objetos. El gradiente morfológico se calcula mediante los operadores primarios de erosión y dilatación y existen tres combinaciones comúnmente usadas: ( f B) + Externo : ρ B + ( f ) = ( f B) f f + Beucher : ρ B ( f ) = ( f B) ( f! B) ( f! B) + Interno : ρ B ( f ) = f ( f! B) 42


43 DETECCIÓN DE BORDES El grosor de los bordes detectados por el gradiente morfológico depende del tamaño del elemento estructurante, ya que a medida que aumenta los bordes producidos serán más gruesos produciendo efectos indeseados en algunas aplicaciones
![DETECCIÓN DE BORDES Para generar bordes delgados se utiliza el gradiente morfológico multiescala, el cual se define como: ˆρ nb = ρ nb T ( [,L] ε (n )B [ WTH nb (ρ nb )]) donde B es un elemento](/docs-images/66/54442541/images/44-1.jpg "estructurante con una forma específica y tamaño n, ρ es el gradiente Beucher, ε denota la erosión, WTH es el top-hat blanco y T es una función de umbralado en el rango [, L].")
44 DETECCIÓN DE BORDES Para generar bordes delgados se utiliza el gradiente morfológico multiescala, el cual se define como: ˆρ nb = ρ nb T ( [,L] ε (n )B [ WTH nb (ρ nb )]) donde B es un elemento estructurante con una forma específica y tamaño n, ρ es el gradiente Beucher, ε denota la erosión, WTH es el top-hat blanco y T es una función de umbralado en el rango [, L]. ρ nb WTH nb ε (n )B ˆρ nb T [,L ] 44

45 DETECCIÓN DE BORDES El mapa de bordes para todas las escalas es obtenido por el máximo puntual entre cada ˆρ nb para todo n: N ˆρ = ˆρ n= nb Beucher Multiescala n = 3 n = 6 45
46 TRANSFORMACIONES GEODÉSICAS Las transformaciones morfológicas vistas hasta ahora se basan en modificar una imagen de entrada utilizando un elemento estructurante. En las trasformaciones geodésicas se consideran dos imágenes de entrada, donde la primera sufre una transformación morfológica y luego es forzada a permanecer dentro o fuera de la segunda imagen. El concepto básico de los métodos geodésicos en morfología es la distancia geodésica: el camino más cercano entre dos puntos que pertenecen a un conjunto está restringido al mismo conjunto. Las transformaciones geodésicas básicas son la dilatación y erosión geodésicas. A Distancia geodésica B Distancia Euclidiana B A 46
47 DILATACIÓN GEODÉSICA La dilatación geodésica incluye dos imágenes: la imagen marcadora y la imagen máscara. Primeramente, la imagen marcadora es dilatada con un elementro estructurante isotrópico. Después es forzada a permancer por debajo de la imagen máscara. La máscara actúa como límite para la propagación de la dilatación de la imagen marcadora. Sea f la imagen marcadora y g la imagen máscara, con D f = D g y f g. La dilatación geodésica de tamaño de la imagen f con respecto de g se define como el mínimo puntual entre la dilatación de f y g como: donde δ es la dilatación morfológica. δ g () (f ) = δ () (f ) g 47
48 DILATACIÓN GEODÉSICA Imagen marcadora f Imagen dilatada con B Dilatación geodésica B Imagen máscara g 48
49 EROSIÓN GEODÉSICA La erosión geodésica incluye dos imágenes: la imagen marcadora y la imagen máscara. La imagen marcadora es primeramente erosionada con un elementro estructurante isotrópico y después se aplica el máximo puntual con la imagen máscara. En este caso, la imágen máscara actúa como límite para la contracción de la imagen marcadora. Sea f la imagen marcadora y g la imagen máscara, con D f = D g y f g. La erosión geodésica de tamaño de la imagen f con respecto de g se define como el máximo puntual entre la erosión de f y g como: donde ε es la erosión morfológica. ε g () (f ) = ε () (f ) g 49
50 EROSIÓN GEODÉSICA Imagen marcadora f Imagen erosionada con B Erosión geodésica B Imagen máscara g 5
51 RECONSTRUCCIÓN MORFOLÓGICA Las transformaciones geodésicas son raramente utilizadas en la práctica. Sin embargo, cuando se aplican hasta la idempotencia se pueden crear poderosos algoritmos de reconstrucción morfológica. Entonces, tanto la dilatación como la erosión geodésicas se pueden aplicar sucesivamente n iteraciones como: δ g (n) (f ) = δ g () δ (n ) g (f ) y ε (n) () g (f ) = ε g ε (n ) g (f ) con δ g () (f ) = f y ε g () (f ) = f. Por tanto, cuando las transformaciones geodésicas aplican hasta que la imagen no cambia más, es decir, la idempotencia, se ha hecho una reconstrucción morfológica. 5
52 RECONSTRUCCIÓN MORFOLÓGICA POR DILATACIÓN La reconstrucción por dilatación de una imagen máscara g a partir de una imagen marcadora f (D f = D g y f g) se define como la dilatación geodésica de f con respecto de g hasta la idempotencia: R g δ (f ) = δ g (i) (f ) f g δ g (f ) δ g ( δ g (f )) a) b) c) δ g ( δ g ( δ g (f ))) ( ( ( ))) δ g δ g δ g δ g (f ) R g δ (f ) d) e) f ) 52

53 RECONSTRUCCIÓN MORFOLÓGICA POR DILATACIÓN Imagen máscara Imagen marcadora iteraciones 2 iteraciones 3 iteraciones Reconstrucción por 53 dilatación
54 RECONSTRUCCIÓN MORFOLÓGICA POR EROSIÓN La reconstrucción por erosión de una imagen máscara g a partir de una imagen marcadora f (D f = D g y f g) se define como la erosión geodésica de f con respecto de g hasta la idempotencia: R g ε (f ) = ε g (i) (f ) g f ε g (f ) ε g ( ε g (f )) a) b) c) ε g ( ε g ( ε g (f ))) ( ( ( ))) ε g ε g ε g ε g (g) R g ε (f ) d) e) f ) 54
55 RECONSTRUCCIÓN MORFOLÓGICA APERTURA Y CERRADURA A partir de los operadores básicos por reconstrucción (erosión y dilatación) se puede crear el operador de apertura por reconstrucción, el cual es una erosión morfológica de tamaño n seguida de una dilatación por reconstrucción: γ R (n) (f ) = R f δ ε (n) (f ) De forma similar, la cerradura por reconstrucción, es una dilatación morfológica de tamaño n seguida de una erosión por reconstrucción: φ (n) ε R (f ) = R f δ (n) (f ) Las siguientes relaciones de orden se mantienen: γ γ R φ R φ 55


56 RECONSTRUCCIÓN MORFOLÓGICA APERTURA Y CERRADURA En la apertura por reconstrucción primeramente se erosiona la imagen original para remover estructuras indeseadas y, posteriormente, se realiza una reconstrucción por dilatación utilizando la imagen original como máscara. Esto hace que se restauren las estructuras que no fueron removidas por la erosión. Imagen original (máscara) Apertura morfológica γ Imagen erosionada (marcadora) Apertura por reconstrucción γ R 56




57 FILTROS POR RECONSTRUCCIÓN Los filtros por reconstrucción combinan secuencialmente operadores de apertura-cerradura por reconstrucción o viceversa como: γ RφR, φr γ R, γ RφR γ R, y φr γ RφR. Imagen ruidosa Apertura-cerradura por reconstrucción 57


58 FILTROS POR RECONSTRUCCIÓN Imagen original sin ruido Imagen ruidosa Filtrado secuencial Filtrado secuencial alternado Filtrado secuencial por reconstrucción 58

 (f ) RBTH( f ) = φ R (n) (f ) f f γ R (n) (f ) RWTH(")
59 TOP-HAT POR RECONSTRUCCIÓN La apertura y cerradura por reconstrucción permiten la definición del top-hat por reconstrucción blanco y negro como: RWTH( f ) = f γ R (n) (f ) RBTH( f ) = φ R (n) (f ) f f γ R (n) (f ) RWTH( f ) = 59
Filtrado no lineal: morfología
 Filtrado no lineal: morfología Gonzalez & Woods, cap 8.4 morfología 1 Fundamentada en la teoría de conjuntos: las imágenes se consideran como conjuntos. Imágenes binarias: conjuntos de pixels corresponden
Filtrado no lineal: morfología Gonzalez & Woods, cap 8.4 morfología 1 Fundamentada en la teoría de conjuntos: las imágenes se consideran como conjuntos. Imágenes binarias: conjuntos de pixels corresponden
Métodos Avanzados para Análisis y Representación de Imágenes
 Morfología Matemática p. 1/24 Métodos Avanzados para Análisis y Representación de Imágenes Morfología Matemática en niveles de gris Departamento de Informática - FICH Universidad Nacional del Litoral Septiembre
Morfología Matemática p. 1/24 Métodos Avanzados para Análisis y Representación de Imágenes Morfología Matemática en niveles de gris Departamento de Informática - FICH Universidad Nacional del Litoral Septiembre
Tema 5: Morfología. Segunda parte
 Tema 5: Morfología Segunda parte 1. Imágenes binarias Morfología Operaciones morfológicas:» Dilatación, erosión, Transformada Hit-or-Miss, apertura y cierre. Aplicaciones:» Extracción de fronteras y componentes
Tema 5: Morfología Segunda parte 1. Imágenes binarias Morfología Operaciones morfológicas:» Dilatación, erosión, Transformada Hit-or-Miss, apertura y cierre. Aplicaciones:» Extracción de fronteras y componentes
Procesamiento Morfológico de Imágenes
 Procesamiento Morfológico de Imágenes Morfología Matemática Se usa para extraer componentes de imágenes útiles para la representación y descripción de forma de regiones, tales como Extracción de límites
Procesamiento Morfológico de Imágenes Morfología Matemática Se usa para extraer componentes de imágenes útiles para la representación y descripción de forma de regiones, tales como Extracción de límites
Extensión de la Morfología Matemática a imágenes en Color
 Departamento de Física, Ingeniería de Sistemas y Teoría de la Señal Grupo de Automática, Robótica y Visión Artificial Extensión de la Morfología Matemática a imágenes en Color Introducción. Imágenes en
Departamento de Física, Ingeniería de Sistemas y Teoría de la Señal Grupo de Automática, Robótica y Visión Artificial Extensión de la Morfología Matemática a imágenes en Color Introducción. Imágenes en
Tema 8. Análisis morfológico en imágenes
 1 Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández Tema 8. Análisis morfológico en imágenes GRUPO DE TECNOLOGÍA INDUSTRIAL Tabla de Contenidos 2 Definición Nomenclatura Erosión Dilatación
1 Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández Tema 8. Análisis morfológico en imágenes GRUPO DE TECNOLOGÍA INDUSTRIAL Tabla de Contenidos 2 Definición Nomenclatura Erosión Dilatación
Capítulo 3. Fundamentos de Morfología Matemática
 Capítulo 3 Fundamentos de Morfología Matemática Procesamiento Morfológico de Imágenes en Color. Aplicación a la Reconstrucción Geodésica 3.1 Introducción La descripción básica de la Morfología Matemática
Capítulo 3 Fundamentos de Morfología Matemática Procesamiento Morfológico de Imágenes en Color. Aplicación a la Reconstrucción Geodésica 3.1 Introducción La descripción básica de la Morfología Matemática
Análisis de imágenes digitales
 Análisis de imágenes digitales SEGMENTACIÓN DE LA IMAGEN Transformada watershed CONCEPTOS BÁSICOS En la morfología matemática, se define una técnica de segmentación basada en regiones denominada transformada
Análisis de imágenes digitales SEGMENTACIÓN DE LA IMAGEN Transformada watershed CONCEPTOS BÁSICOS En la morfología matemática, se define una técnica de segmentación basada en regiones denominada transformada
Preguntas tema 4: MORFOLOGÍA
 Preguntas tema 4: MORFOLOGÍA 1 I N G E N I E R Í A I N F O R M Á T I C A C U R S O 2 0 1 3-2 0 1 4 MORFOLOGÍA BINARIA 2 Ejemplo clausura: Corrección de texto escaneado - Imagen original: texto escaneado
Preguntas tema 4: MORFOLOGÍA 1 I N G E N I E R Í A I N F O R M Á T I C A C U R S O 2 0 1 3-2 0 1 4 MORFOLOGÍA BINARIA 2 Ejemplo clausura: Corrección de texto escaneado - Imagen original: texto escaneado
Análisis de imágenes digitales
 Análisis de imágenes digitales SEGMENTACIÓN DE LA IMAGEN Segmentación basada en texturas INTRODUCCIÓN La textura provee información sobre la distribución espacio-local del color o niveles de intensidades
Análisis de imágenes digitales SEGMENTACIÓN DE LA IMAGEN Segmentación basada en texturas INTRODUCCIÓN La textura provee información sobre la distribución espacio-local del color o niveles de intensidades
Tema 6: Morfología. Primera parte
 Tema 6: Morfología Primera parte Morfología La morfología matemática se basa en operaciones de teoría de conjuntos. En el caso de imágenes binarias, los conjuntos tratados son subconjuntos de Z 2 y en
Tema 6: Morfología Primera parte Morfología La morfología matemática se basa en operaciones de teoría de conjuntos. En el caso de imágenes binarias, los conjuntos tratados son subconjuntos de Z 2 y en
Universidad Nacional de Quilmes Ing. en Automatización y Control Industrial Cátedra: Visión Artificial Agosto de 2005
 Apertura y Clausura (Opening and Closing) Como vimos, la dilatación y la erosión están muy relacionadas con la forma; la primera operación expande la imagen mientras que la segunda la contrae. La dilatación
Apertura y Clausura (Opening and Closing) Como vimos, la dilatación y la erosión están muy relacionadas con la forma; la primera operación expande la imagen mientras que la segunda la contrae. La dilatación
Tema 2: PROCESAMIENTO EN EL DOMINIO ESPACIAL (Parte 2)
") Tema 2: PROCESAMIENTO EN EL DOMINIO ESPACIAL (Parte 2) 1 I N G E N I E R Í A I N F O R M Á T I C A D P T O. M A T E M Á T I C A A P L I C A D A I 2 ÍNDICE: Filtrado espacial Filtros de suavizado Filtros
Tema 2: PROCESAMIENTO EN EL DOMINIO ESPACIAL (Parte 2) 1 I N G E N I E R Í A I N F O R M Á T I C A D P T O. M A T E M Á T I C A A P L I C A D A I 2 ÍNDICE: Filtrado espacial Filtros de suavizado Filtros
Métodos Avanzados para Análisis y Representación de Imágenes
 Morfología Matemática p. 1/44 Métodos Avanzados para Análisis y Representación de Imágenes Morfología Matemática Departamento de Informática - FICH Universidad Nacional del Litoral Agosto de 2012 Morfología
Morfología Matemática p. 1/44 Métodos Avanzados para Análisis y Representación de Imágenes Morfología Matemática Departamento de Informática - FICH Universidad Nacional del Litoral Agosto de 2012 Morfología
Procesamiento de imágenes
 Procesamiento de imágenes Técnicas de realce de imágenes Técnicas de realce de imágenes Las imágenes digitalizadas no presentan siempre una calidad adecuada para su utilización, ello puede ser debido a
Procesamiento de imágenes Técnicas de realce de imágenes Técnicas de realce de imágenes Las imágenes digitalizadas no presentan siempre una calidad adecuada para su utilización, ello puede ser debido a
Operaciones Morfológicas en Imágenes Binarias
 Operaciones Morfológicas en Imágenes Binarias Introducción La morfología matemática es una herramienta muy utilizada en el procesamiento de i- mágenes. Las operaciones morfológicas pueden simplificar los
Operaciones Morfológicas en Imágenes Binarias Introducción La morfología matemática es una herramienta muy utilizada en el procesamiento de i- mágenes. Las operaciones morfológicas pueden simplificar los
Caracterización de Imágenes
 de Imágenes Visión Artificial Andrea Rueda Pontificia Universidad Javeriana Departamento de Ingeniería de Sistemas Caracterizar: "determinar los atributos peculiares de alguien o de algo, de modo que claramente
de Imágenes Visión Artificial Andrea Rueda Pontificia Universidad Javeriana Departamento de Ingeniería de Sistemas Caracterizar: "determinar los atributos peculiares de alguien o de algo, de modo que claramente
Procesamiento de Imágenes. Curso 2011 Clase 3 Eliminación del ruido mediante filtrado espacial
 Procesamiento de Imágenes Curso 2 Clase 3 Eliminación del ruido mediante filtrado espacial Eliminación del ruido Entendemos por ruido en imágenes digitales cualquier valor de un píxel de una imagen que
Procesamiento de Imágenes Curso 2 Clase 3 Eliminación del ruido mediante filtrado espacial Eliminación del ruido Entendemos por ruido en imágenes digitales cualquier valor de un píxel de una imagen que
License Plate Detection using Neural Networks
 License Plate Detection using Neural Networks Luis Carrera, Marco Mora Les Fous du Pixel Image Processing Research Group Department of Computer Science Catholic University of Maule http://www.lfdp-iprg.net
License Plate Detection using Neural Networks Luis Carrera, Marco Mora Les Fous du Pixel Image Processing Research Group Department of Computer Science Catholic University of Maule http://www.lfdp-iprg.net
Filtros digitales dominio del espacio dominio de la frecuencia
 Tema 3: Filtros 1 Filtros digitales Los filtros digitales constituyen uno de los principales modos de operar en el procesamiento de imágenes digitales. Pueden usarse para distintos fines, pero en todos
Tema 3: Filtros 1 Filtros digitales Los filtros digitales constituyen uno de los principales modos de operar en el procesamiento de imágenes digitales. Pueden usarse para distintos fines, pero en todos
Porqué analizar imágenes?
 Porqué analizar imágenes? Medidas que requieren estudiar un número demasiado elevado de imágenes. Análisis cuantitativo: La visión humana no cuantifica por si sola. El análisis automático es más repetitivo
Porqué analizar imágenes? Medidas que requieren estudiar un número demasiado elevado de imágenes. Análisis cuantitativo: La visión humana no cuantifica por si sola. El análisis automático es más repetitivo
1. Análisis Teórico. 1.1. Microscopio Óptico. 1.2. Teoría de Formación de Imágenes de Abbe. Resolución. Laboratorio de Ondas y Óptica.
 Laboratorio de Ondas y Óptica Práctica N 7 Microscopía Óptica Digital Departamento de Física, FaCyT. Universidad de Carabobo, Venezuela. Objetivos Estudiar el funcionamiento de un Microscopio Óptico Preparación
Laboratorio de Ondas y Óptica Práctica N 7 Microscopía Óptica Digital Departamento de Física, FaCyT. Universidad de Carabobo, Venezuela. Objetivos Estudiar el funcionamiento de un Microscopio Óptico Preparación
Extracción de características
 Extracción de características Gonzalez & Woods, Digital Image Processing, cap. 8 extracción de características 1 Propiedades de las características Tienen que ser robustos: la extracción debe ser insensible
Extracción de características Gonzalez & Woods, Digital Image Processing, cap. 8 extracción de características 1 Propiedades de las características Tienen que ser robustos: la extracción debe ser insensible
Operaciones Morfológicas. Procesamiento Digital de Imágenes. Conceptos y algoritmos relevantes:
 Procesamiento Digital de Imágenes Pablo Roncagliolo B. Nº Conceptos y algoritmos relevantes: Operaciones lógicas Dilatación Erosión Open (erosión+dilatación) Close (dilatación+erosión) Bordes utilizando
Procesamiento Digital de Imágenes Pablo Roncagliolo B. Nº Conceptos y algoritmos relevantes: Operaciones lógicas Dilatación Erosión Open (erosión+dilatación) Close (dilatación+erosión) Bordes utilizando
Apéndice A: Funciones del programa LightPAP
 Apéndice A: Funciones del programa LightPAP A continuación se van a explicar las funciones principales que se han desarrollado para esta aplicación. 1 calcula_prop.m function [nc,cv,posicion,tinta,saturacion,luminancia]
Apéndice A: Funciones del programa LightPAP A continuación se van a explicar las funciones principales que se han desarrollado para esta aplicación. 1 calcula_prop.m function [nc,cv,posicion,tinta,saturacion,luminancia]
FUNCIÓN. La Respuesta correcta es D
 FUNCIONES FUNCIÓN La Respuesta correcta es D FUNCIÓN Función Continua: Es aquella en la que su gráfica se puede recorrer en forma ininterrumpida en toda su extensión. FUNCIÓN Función Discontinua: Es aquella
FUNCIONES FUNCIÓN La Respuesta correcta es D FUNCIÓN Función Continua: Es aquella en la que su gráfica se puede recorrer en forma ininterrumpida en toda su extensión. FUNCIÓN Función Discontinua: Es aquella
Figura 1: Propiedades de textura: (a) Suavidad, (b) Rugosidad y (c) Regularidad
 Suavidad, (b) Rugosidad y (c) Regularidad") 3 TEXTURA 3.1 CONCEPTO DE LA TEXTURA La textura es una característica importante utilizada en segmentación, identificación de objetos o regiones de interés en una imagen y obtención de forma. El uso de
3 TEXTURA 3.1 CONCEPTO DE LA TEXTURA La textura es una característica importante utilizada en segmentación, identificación de objetos o regiones de interés en una imagen y obtención de forma. El uso de
Reconocimiento automático a través de visión artificial, correlación estadística y Matlab aplicado a las matrículas de vehículos
 Reconocimiento automático a través de visión artificial, correlación estadística y Matlab aplicado a las matrículas de vehículos Orlando Barcia * obarcia@ups.edu.ec Introducción Existen muchas investigaciones
Reconocimiento automático a través de visión artificial, correlación estadística y Matlab aplicado a las matrículas de vehículos Orlando Barcia * obarcia@ups.edu.ec Introducción Existen muchas investigaciones
Capítulo 2. Técnicas de procesamiento digital de imágenes y reconocimiento de patrones.
 Capítulo 2. Técnicas de procesamiento digital de imágenes y reconocimiento de patrones. 2.1 Revisión sistema reconocimiento caracteres [9]: Un sistema de reconocimiento típicamente esta conformado por
Capítulo 2. Técnicas de procesamiento digital de imágenes y reconocimiento de patrones. 2.1 Revisión sistema reconocimiento caracteres [9]: Un sistema de reconocimiento típicamente esta conformado por
Filtrado lineal. Digital image processing, Gonzalez & Woods, chpt 4 Digital Image Processing, WK Pratt, part 3. filtrado lineal 1
 Filtrado lineal Digital image processing, Gonzalez & Woods, chpt 4 Digital Image Processing, WK Pratt, part 3 filtrado lineal 1 Filtrado es la operación de eliminar o resaltar componentes de la representación
Filtrado lineal Digital image processing, Gonzalez & Woods, chpt 4 Digital Image Processing, WK Pratt, part 3 filtrado lineal 1 Filtrado es la operación de eliminar o resaltar componentes de la representación
3. ANÁLISIS DE SEÑALES
 3. ANÁLISIS DE SEÑALES 3.1 REGISTRO Y TRATAMIENTO DE SEÑALES Una señal se define como la historia de los valores de aceleración que mide un acelerómetro en determinado tiempo para un punto específico.
3. ANÁLISIS DE SEÑALES 3.1 REGISTRO Y TRATAMIENTO DE SEÑALES Una señal se define como la historia de los valores de aceleración que mide un acelerómetro en determinado tiempo para un punto específico.
Curso de Procesamiento Digital de Imágenes
 Curso de Procesamiento Digital de Imágenes Impartido por: Elena Martínez Departamento de Ciencias de la Computación IIMAS, UNAM, cubículo 408 http://turing.iimas.unam.mx/~elena/teaching/pdi-mast.html elena.martinez@iimas.unam.mx
Curso de Procesamiento Digital de Imágenes Impartido por: Elena Martínez Departamento de Ciencias de la Computación IIMAS, UNAM, cubículo 408 http://turing.iimas.unam.mx/~elena/teaching/pdi-mast.html elena.martinez@iimas.unam.mx
Descomposición de dos Anillos de Funciones Continuas
 Miscelánea Matemática 38 (2003) 65 75 SMM Descomposición de dos Anillos de Funciones Continuas Rogelio Fernández-Alonso Departamento de Matemáticas Universidad Autónoma Metropolitana-I 09340 México, D.F.
Miscelánea Matemática 38 (2003) 65 75 SMM Descomposición de dos Anillos de Funciones Continuas Rogelio Fernández-Alonso Departamento de Matemáticas Universidad Autónoma Metropolitana-I 09340 México, D.F.
Conceptos básicos de Geometría
 Dr. Eduardo A. RODRÍGUEZ TELLO CINVESTAV-Tamaulipas 15 de enero del 2013 Dr. Eduardo RODRÍGUEZ T. (CINVESTAV) 15 de enero del 2013 1 / 25 1 Geometría Afín Geometría Euclidiana Áreas y ángulos Dr. Eduardo
Dr. Eduardo A. RODRÍGUEZ TELLO CINVESTAV-Tamaulipas 15 de enero del 2013 Dr. Eduardo RODRÍGUEZ T. (CINVESTAV) 15 de enero del 2013 1 / 25 1 Geometría Afín Geometría Euclidiana Áreas y ángulos Dr. Eduardo
Universidad Nacional de Quilmes Ing. en Automatización y Control Industrial Cátedra: Visión Artificial Agosto de 2005
 Extracción de Frontera (Boundary Extraction) La frontera de un conjunto A, escrita como β(a), se puede obtener erosionando A por B y luego calcular la diferencia entre A y su erosión. Esto es β ( A) =
Extracción de Frontera (Boundary Extraction) La frontera de un conjunto A, escrita como β(a), se puede obtener erosionando A por B y luego calcular la diferencia entre A y su erosión. Esto es β ( A) =
RESPUESTAS del. 1. Determina unos valores de los parámetros, a, b y c, de la transformación. 0 si 0 u
 RESPUESTAS del Examen de PROCESAMIENTO IMÁGENES / 9-IX-28. Determina unos valores de los parámetros, a, b y c, de la transformación si uc Tu ( ) 2 a bu si c u para conseguir mejorar el contraste de la
RESPUESTAS del Examen de PROCESAMIENTO IMÁGENES / 9-IX-28. Determina unos valores de los parámetros, a, b y c, de la transformación si uc Tu ( ) 2 a bu si c u para conseguir mejorar el contraste de la
Estéreo dinámico. Estéreo dinámico
 Estéreo dinámico 1 Vectores locales de desplazamiento Dada una secuencia de imagenes Tomadas a intervalos Movimiento absoluto: movimiento independiente de la cámara Movimiento relativo: movimiento debido
Estéreo dinámico 1 Vectores locales de desplazamiento Dada una secuencia de imagenes Tomadas a intervalos Movimiento absoluto: movimiento independiente de la cámara Movimiento relativo: movimiento debido
FUNCIONES DE DOS VARIABLES
 FUNCIONES DE DOS VARIABLES - Funciones de dos variables reales - Límites 3- Continuidad de funciones de dos variables 4- Derivabilidad de funciones de dos variables 5- Diferenciabilidad de funciones de
FUNCIONES DE DOS VARIABLES - Funciones de dos variables reales - Límites 3- Continuidad de funciones de dos variables 4- Derivabilidad de funciones de dos variables 5- Diferenciabilidad de funciones de
GUIA 4: ALGEBRA DE BOOLE
 GUIA 4: ALGEBRA DE BOOLE En 1854 George Boole introdujo una notación simbólica para el tratamiento de variables cuyo valor podría ser verdadero o falso (variables binarias) Así el álgebra de Boole nos
GUIA 4: ALGEBRA DE BOOLE En 1854 George Boole introdujo una notación simbólica para el tratamiento de variables cuyo valor podría ser verdadero o falso (variables binarias) Así el álgebra de Boole nos
PSU Matemática NM-4 Guía 23: Isometrías. Nombre: Curso: Fecha: -
 Centro Educacional San Carlos de Aragón. Dpto. Matemática. Prof. Ximena Gallegos H. PSU Matemática NM- Guía : Isometrías Nombre: Curso: Fecha: - Contenido: Isometrías. Aprendizaje Esperado: Analiza traslaciones
Centro Educacional San Carlos de Aragón. Dpto. Matemática. Prof. Ximena Gallegos H. PSU Matemática NM- Guía : Isometrías Nombre: Curso: Fecha: - Contenido: Isometrías. Aprendizaje Esperado: Analiza traslaciones
Se llama adjunto de un elemento de una matriz A, al número resultante de multiplicar por el determinante de la matriz complementaria
 T.3: MATRICES Y DETERMINANTES 3.1 Determinantes de segundo orden Se llama determinante de a: 3.2 Determinantes de tercer orden Se llama determinante de a: Ejercicio 1: Halla los determinantes de las siguientes
T.3: MATRICES Y DETERMINANTES 3.1 Determinantes de segundo orden Se llama determinante de a: 3.2 Determinantes de tercer orden Se llama determinante de a: Ejercicio 1: Halla los determinantes de las siguientes
Reflexiones adicionales
 92 Medición Área 1. División del paralelogramo con resto Reflexiones adicionales Las imágenes de los paralelogramos de la página 3 plantean una situación interesante que no se hace explícita en el texto:
92 Medición Área 1. División del paralelogramo con resto Reflexiones adicionales Las imágenes de los paralelogramos de la página 3 plantean una situación interesante que no se hace explícita en el texto:
La transformada de Fourier. Aplicación al filtrado de imágenes
 La transformada de Fourier. Aplicación al filtrado de imágenes Apellidos, nombre Ruiz Fernández, Luis Ángel (laruiz@cgf.upv.es) Departamento Centro Ingeniería Cartográfica, Geodesia y Fotogrametría ETSI.
La transformada de Fourier. Aplicación al filtrado de imágenes Apellidos, nombre Ruiz Fernández, Luis Ángel (laruiz@cgf.upv.es) Departamento Centro Ingeniería Cartográfica, Geodesia y Fotogrametría ETSI.
Tema 6: Descriptores topológicos, geométricos y estadísticos de las imágenes digitales
 Tema 6: Descriptores topológicos, geométricos y estadísticos de las imágenes digitales de imágenes (después de realizar una segmentación) Componentes conexas Agujeros (2D) Túneles y cavidades (3D) Característica
Tema 6: Descriptores topológicos, geométricos y estadísticos de las imágenes digitales de imágenes (después de realizar una segmentación) Componentes conexas Agujeros (2D) Túneles y cavidades (3D) Característica
6.1 Procesamiento morfológico de imágenes
 Procesamiento morfológico Las tareas de segmentación no suelen dar un resultado exacto de la delimitación de los objetos o regiones de interés. Aparecen píxeles mal clasificados, bordes imprecisos de los
Procesamiento morfológico Las tareas de segmentación no suelen dar un resultado exacto de la delimitación de los objetos o regiones de interés. Aparecen píxeles mal clasificados, bordes imprecisos de los
Retomamos Imágenes infrarrojas térmicas
 Retomamos Imágenes infrarrojas térmicas Recordando que: Con el sensor infrarrojo el satélite mide la radiación emitida desde de la superficie de la Tierra y de los topes de nubes, y con éstos datos se
Retomamos Imágenes infrarrojas térmicas Recordando que: Con el sensor infrarrojo el satélite mide la radiación emitida desde de la superficie de la Tierra y de los topes de nubes, y con éstos datos se
FILTRO DE COLOR FUZZY BASADO EN EL HISTOGRAMA PARA LA RESTAURACIÓN DE IMÁGENES. Jesús López de la Cruz Grupo 10
 FILTRO DE COLOR FUZZY BASADO EN EL HISTOGRAMA PARA LA RESTAURACIÓN DE IMÁGENES Jesús López de la Cruz Grupo 10 Problema Soluciones anteriores Algoritmo HFC Explicación visual Problema Tenemos una imagen
FILTRO DE COLOR FUZZY BASADO EN EL HISTOGRAMA PARA LA RESTAURACIÓN DE IMÁGENES Jesús López de la Cruz Grupo 10 Problema Soluciones anteriores Algoritmo HFC Explicación visual Problema Tenemos una imagen
Análisis de imágenes digitales
 Análisis de imágenes digitales SEGMENTACIÓN DE LA IMAGEN Segmentación basada en movimiento INTRODUCCIÓN Una secuencia de imágenes involucra la participación de dos o más imágenes de una determinada escena,
Análisis de imágenes digitales SEGMENTACIÓN DE LA IMAGEN Segmentación basada en movimiento INTRODUCCIÓN Una secuencia de imágenes involucra la participación de dos o más imágenes de una determinada escena,
FILTRADO DE IMÁGENES
 FILTRADO DE IMÁGENES 1 INDICE RUIDO Qué es el ruido? Tipos de ruido TECNICAS DE FILTRADO EN DOMINIO ESPACIAL Promediado de imágenes Filtros de orden Filtros de medias DOMINIO FRECUENCIAL FUNCIONES EN MATLAB
FILTRADO DE IMÁGENES 1 INDICE RUIDO Qué es el ruido? Tipos de ruido TECNICAS DE FILTRADO EN DOMINIO ESPACIAL Promediado de imágenes Filtros de orden Filtros de medias DOMINIO FRECUENCIAL FUNCIONES EN MATLAB
Inducción Matemática Conjuntos Funciones. Matemática Discreta. Agustín G. Bonifacio UNSL. Repaso de Inducción, Conjuntos y Funciones
 UNSL Repaso de Inducción, y Inducción Matemática (Sección 1.7 del libro) Supongamos que queremos demostrar enunciados del siguiente tipo: P(n) : La suma de los primeros n números naturales es n(n+1)
UNSL Repaso de Inducción, y Inducción Matemática (Sección 1.7 del libro) Supongamos que queremos demostrar enunciados del siguiente tipo: P(n) : La suma de los primeros n números naturales es n(n+1)
ANALÓGICO vs. DIGITAL
 ANALÓGICO vs. DIGITAL Una señal analógica se caracteriza por presentar un numero infinito de valores posibles. Continuo Posibles valores: 1.00, 1.01, 200003,, infinitas posibilidades Una señal digital
ANALÓGICO vs. DIGITAL Una señal analógica se caracteriza por presentar un numero infinito de valores posibles. Continuo Posibles valores: 1.00, 1.01, 200003,, infinitas posibilidades Una señal digital
M É T O D O S A L T E R N A T I V O S P A R A E X T R A C C I O N D E V E C T O R C A R A C T E R I S T I C AS.
 A P É N D I C E D M É T O D O S A L T E R N A T I V O S P A R A E X T R A C C I O N D E V E C T O R C A R A C T E R I S T I C AS. Código extendido de Sombras. Burr ha propuesto el código de sombras como
A P É N D I C E D M É T O D O S A L T E R N A T I V O S P A R A E X T R A C C I O N D E V E C T O R C A R A C T E R I S T I C AS. Código extendido de Sombras. Burr ha propuesto el código de sombras como
Análisis Matemático I: Numeros Reales y Complejos
 Contents : Numeros Reales y Complejos Universidad de Murcia Curso 2008-2009 Contents 1 Definición axiomática de R Objetivos Definición axiomática de R Objetivos 1 Definir (y entender) R introducido axiomáticamente.
Contents : Numeros Reales y Complejos Universidad de Murcia Curso 2008-2009 Contents 1 Definición axiomática de R Objetivos Definición axiomática de R Objetivos 1 Definir (y entender) R introducido axiomáticamente.
Guía de Matemática Segundo Medio
 Guía de Matemática Segundo Medio Aprendizaje Esperado:. Analizan la ecuación de la recta; establecen la dependencia entre las variables y la expresan gráfica y algebraicamente.. Identifican e interpretan
Guía de Matemática Segundo Medio Aprendizaje Esperado:. Analizan la ecuación de la recta; establecen la dependencia entre las variables y la expresan gráfica y algebraicamente.. Identifican e interpretan
Estándares de evaluación en la materia de MATEMÁTICAS de 1º de ESO. Curso 2016/2017.
 Estándares de evaluación en la materia de MATEMÁTICAS de 1º de ESO. Curso 2016/2017. Bloque 1. Procesos, métodos y actitudes en matemáticas. Los criterios correspondientes a este bloque son los marcador
Estándares de evaluación en la materia de MATEMÁTICAS de 1º de ESO. Curso 2016/2017. Bloque 1. Procesos, métodos y actitudes en matemáticas. Los criterios correspondientes a este bloque son los marcador
001. Interpreta correctamente códigos (teléfonos, matrículas, NIF ).
.") 1.6 Criterios específicos de evaluación. 001. Interpreta correctamente códigos (teléfonos, matrículas, NIF ). 002. Calcula el total de elementos que se puedan codificar con una determinada clave. 003.
1.6 Criterios específicos de evaluación. 001. Interpreta correctamente códigos (teléfonos, matrículas, NIF ). 002. Calcula el total de elementos que se puedan codificar con una determinada clave. 003.
UNIDAD I: SISTEMAS DE DOS ECUACIONES CON DOS INCÓGNITAS
 UNIDAD I: SISTEMAS DE DOS ECUACIONES CON DOS INCÓGNITAS Sistemas de dos ecuaciones con dos incógnitas. Método de igualación. Método de reducción. Método de sustitución Método de eliminación Gaussiana.
UNIDAD I: SISTEMAS DE DOS ECUACIONES CON DOS INCÓGNITAS Sistemas de dos ecuaciones con dos incógnitas. Método de igualación. Método de reducción. Método de sustitución Método de eliminación Gaussiana.
CIDEMORF: Herramienta para procesamiento de imágenes planas usando morfología matemática en GAMBAS
 CIDEMORF: Herramienta para procesamiento de imágenes planas usando morfología matemática en GAMBAS *a a Jesús Antonio Álvarez Cedillo, Jesús Ignacio Espinosa de la Cruz,, a Francisco Javier Espinosa de
CIDEMORF: Herramienta para procesamiento de imágenes planas usando morfología matemática en GAMBAS *a a Jesús Antonio Álvarez Cedillo, Jesús Ignacio Espinosa de la Cruz,, a Francisco Javier Espinosa de
Segmentación de imágenes. Procesamiento de imágenes biomédicas Curso 2011
 Segmentación de imágenes Procesamiento de imágenes biomédicas Curso 2011 Introducción Hasta ahora el procesamiento digital de una imagen implicaba, una imagen de entrada y una imagen de salida. Ahora con
Segmentación de imágenes Procesamiento de imágenes biomédicas Curso 2011 Introducción Hasta ahora el procesamiento digital de una imagen implicaba, una imagen de entrada y una imagen de salida. Ahora con
Programa de Acceso Inclusivo, Equidad y Permanencia. PAIEP, Universidad de Santiago
 Guía de vectores. Vectores En matemática, un vector es una herramienta geométrica utilizada para representar una magnitud física definida en un sistema de referencia que se caracteriza por tener módulo
Guía de vectores. Vectores En matemática, un vector es una herramienta geométrica utilizada para representar una magnitud física definida en un sistema de referencia que se caracteriza por tener módulo
REDUCCIÓN DEL RUIDO EN UNA IMAGEN DIGITAL
 Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández REDUCCIÓN DEL RUIDO EN UNA IMAGEN DIGITAL Tabla de Contenidos Definición Filtros No Lineales Filtros Temporales Definición 3 G = Ruido:
Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández REDUCCIÓN DEL RUIDO EN UNA IMAGEN DIGITAL Tabla de Contenidos Definición Filtros No Lineales Filtros Temporales Definición 3 G = Ruido:
Simetria Tablas de Caracteres
 1 of 7 10-10-15 17:51 virtual.unal.edu.co Simetria Tablas de Caracteres Simetria- Tablas de Caracteres Los números, caracteres, que indican los cambios de una propiedad de una molécula, p. ej. una vibración,
1 of 7 10-10-15 17:51 virtual.unal.edu.co Simetria Tablas de Caracteres Simetria- Tablas de Caracteres Los números, caracteres, que indican los cambios de una propiedad de una molécula, p. ej. una vibración,
MATEMATICAS ESPECIALES I PRACTICA 7 CLASE 1. Transformaciones conformes
 MATEMATICAS ESPECIALES I PRACTICA 7 CLASE 1 Transformaciones conformes 1 Determinar donde son conformes las siguientes transformaciones: (a) w() = 2 + 2 (b) w() = 1 + i (c) w() = + 1 (d) w() = En cada
MATEMATICAS ESPECIALES I PRACTICA 7 CLASE 1 Transformaciones conformes 1 Determinar donde son conformes las siguientes transformaciones: (a) w() = 2 + 2 (b) w() = 1 + i (c) w() = + 1 (d) w() = En cada
SEGMENTADO DE HUELLAS EN FICHAS DECADACTILARES
 Captura y Procesamiento Digital de Señales e Imagenes Trabajo Final: SEGMENTADO DE HUELLAS EN FICHAS DECADACTILARES Barletta, juan Schinner, Sebastián Zarza, Gonzalo INTRODUCCION Limpieza y una Segmentación
Captura y Procesamiento Digital de Señales e Imagenes Trabajo Final: SEGMENTADO DE HUELLAS EN FICHAS DECADACTILARES Barletta, juan Schinner, Sebastián Zarza, Gonzalo INTRODUCCION Limpieza y una Segmentación
NOCIONES PRELIMINARES (*) 1
 1") CONJUNTOS NOCIONES PRELIMINARES (*) 1 Conjunto no es un término definible, pero da idea de una reunión de cosas ( elementos ) que tienen algo en común. En matemática los conjuntos se designan con letras
CONJUNTOS NOCIONES PRELIMINARES (*) 1 Conjunto no es un término definible, pero da idea de una reunión de cosas ( elementos ) que tienen algo en común. En matemática los conjuntos se designan con letras
Capítulo 2: Formulación matemática del problema
 Capítulo : Formulación matemática del problema. Introducción El análisis del comportamiento en régimen permanente o transitorio de una red de puesta a tierra se fundamenta en la teoría electromagnética
Capítulo : Formulación matemática del problema. Introducción El análisis del comportamiento en régimen permanente o transitorio de una red de puesta a tierra se fundamenta en la teoría electromagnética
Contenidos. Importancia del tema. Conocimientos previos para este tema?
 Transformación conforme Contenidos Unidad I: Funciones de variable compleja. Operaciones. Analiticidad, integrales, singularidades, residuos. Funciones de variable real a valores complejos. Funciones de
Transformación conforme Contenidos Unidad I: Funciones de variable compleja. Operaciones. Analiticidad, integrales, singularidades, residuos. Funciones de variable real a valores complejos. Funciones de
1. Sistemas Lineales e Invariantes a la Traslación 1.1 Motivación de las imágenes digitales Qué es una imagen digital? Sistema: Suma: Escalamiento:
 1. Sistemas Lineales e Invariantes a la Traslación 1.1 Motivación de las imágenes digitales 1.2 Sistemas lineales 1.2.1 Ejemplo de Sistemas Lineales Qué es una imagen digital? a) Sistema: un sistema realiza
1. Sistemas Lineales e Invariantes a la Traslación 1.1 Motivación de las imágenes digitales 1.2 Sistemas lineales 1.2.1 Ejemplo de Sistemas Lineales Qué es una imagen digital? a) Sistema: un sistema realiza
LABORATORIO Nº 9 TABLAS DINÁMICAS
 OBJETIVO Mejorar el nivel de comprensión y el manejo de las destrezas del estudiante para utilizar tablas dinámicas en Microsoft Excel. 1) DEFINICIÓN Las tablas dinámicas permiten resumir y analizar fácilmente
OBJETIVO Mejorar el nivel de comprensión y el manejo de las destrezas del estudiante para utilizar tablas dinámicas en Microsoft Excel. 1) DEFINICIÓN Las tablas dinámicas permiten resumir y analizar fácilmente
Detección de bordes en una imagen.
 Detección de bordes en una imagen. Departamento de Ingeniería electrónica, Telecomunicación y Automática. Área de Ingeniería de Sistemas y Automática OBJETIVOS: Utilizar distintas máscaras empleadas para
Detección de bordes en una imagen. Departamento de Ingeniería electrónica, Telecomunicación y Automática. Área de Ingeniería de Sistemas y Automática OBJETIVOS: Utilizar distintas máscaras empleadas para
NIVELACIÓN MATEMÁTICA 2 AÑO Contenidos: Transformaciones Isométricas Prof. Juan Schuchhardt
 1 Contenidos: Transformaciones Isométricas Prof. Juan Schuchhardt Introducción: Una transformación de una figura geométrica indica que, de alguna manera, ella es alterada o sometida a algún cambio. En
1 Contenidos: Transformaciones Isométricas Prof. Juan Schuchhardt Introducción: Una transformación de una figura geométrica indica que, de alguna manera, ella es alterada o sometida a algún cambio. En
son dos elementos de Rⁿ, definimos su suma, denotada por
 1.1 Definición de un vector en R², R³ y su Interpretación geométrica. 1.2 Introducción a los campos escalares y vectoriales. 1.3 La geometría de las operaciones vectoriales. 1.4 Operaciones con vectores
1.1 Definición de un vector en R², R³ y su Interpretación geométrica. 1.2 Introducción a los campos escalares y vectoriales. 1.3 La geometría de las operaciones vectoriales. 1.4 Operaciones con vectores
Esquemas de análisis sintáctico para CFG
 Apéndice A Esquemas de análisis sintáctico Los algoritmos de análisis sintáctico de esta memoria se describen utilizando esquemas de análisis sintáctico, una estructura para realizar descripciones de alto
Apéndice A Esquemas de análisis sintáctico Los algoritmos de análisis sintáctico de esta memoria se describen utilizando esquemas de análisis sintáctico, una estructura para realizar descripciones de alto
Tema 4. Reducción del ruido
 Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández GRUPO DE TECNOLOGÍA INDUSTRIAL Tabla de Contenidos Definición Filtros Lineales Filtros Temporales Realce Espacial Definición Ruido:
Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández GRUPO DE TECNOLOGÍA INDUSTRIAL Tabla de Contenidos Definición Filtros Lineales Filtros Temporales Realce Espacial Definición Ruido:
Espacios conexos. Capítulo Conexidad
 Capítulo 5 Espacios conexos 1. Conexidad En este capítulo exploraremos el concepto de conexidad en un espacio métrico, y estudiaremos algunas de sus aplicaciones. Definición 5.1. Decimos que el espacio
Capítulo 5 Espacios conexos 1. Conexidad En este capítulo exploraremos el concepto de conexidad en un espacio métrico, y estudiaremos algunas de sus aplicaciones. Definición 5.1. Decimos que el espacio
ANALISIS MORFOLOGICO DE IMAGEN MULTICANAL
 UNIVERSIDAD CENTRAL DE VENEZUELA FACULTAD DE CIENCIAS POSTGRADO EN INSTRUMENTACION ANALISIS MORFOLOGICO DE IMAGEN MULTICANAL Elaborado por: Lic. Roger José Bello Otero Tutor: Dr.Wuilian Torres. Caracas,
UNIVERSIDAD CENTRAL DE VENEZUELA FACULTAD DE CIENCIAS POSTGRADO EN INSTRUMENTACION ANALISIS MORFOLOGICO DE IMAGEN MULTICANAL Elaborado por: Lic. Roger José Bello Otero Tutor: Dr.Wuilian Torres. Caracas,
2 Transformaciones en 3D
 2 Transformaciones en 3D La manera más fácil de conseguir las transformaciones básicas (traslación, rotación, escalación, en general las transformaciones afines) es utilizando matrices de transformación.
2 Transformaciones en 3D La manera más fácil de conseguir las transformaciones básicas (traslación, rotación, escalación, en general las transformaciones afines) es utilizando matrices de transformación.
Campo de velocidades se puede representar mediante una función potencial φ, escalar
 Flujo Potencial Campo de velocidades se puede representar mediante una función potencial φ, escalar Condición necesaria flujo irrotacional, V=0. Hipótesis: Flujo irrotacional, incompresible y permanente
Flujo Potencial Campo de velocidades se puede representar mediante una función potencial φ, escalar Condición necesaria flujo irrotacional, V=0. Hipótesis: Flujo irrotacional, incompresible y permanente
INSTITUTO ESPAÑOL DE EDUCACIÓN SECUNDARIA "SEVERO OCHOA" Departamento de Matemáticas Curso Programación Didáctica EVALUACIÓN
 INSTITUTO ESPAÑOL DE EDUCACIÓN SECUNDARIA "SEVERO OCHOA" Departamento de Matemáticas Curso 2013-2014 Programación Didáctica EVALUACIÓN Criterios de evaluación GEOMETRÍA 1. Conoce y utiliza procedimientos
INSTITUTO ESPAÑOL DE EDUCACIÓN SECUNDARIA "SEVERO OCHOA" Departamento de Matemáticas Curso 2013-2014 Programación Didáctica EVALUACIÓN Criterios de evaluación GEOMETRÍA 1. Conoce y utiliza procedimientos
EL PROBLEMA GENERAL DE OPTIMIZACION
 EL PROBLEMA GENERAL DE OPTIMIZACION Terminología Tipos de soluciones Resultados teóricos sobre existencia y unicidad de soluciones Método gráfico de resolución Problemas de optimización Este tipo de problemas
EL PROBLEMA GENERAL DE OPTIMIZACION Terminología Tipos de soluciones Resultados teóricos sobre existencia y unicidad de soluciones Método gráfico de resolución Problemas de optimización Este tipo de problemas
Una curva del plano correspondiente a la gráfica de una función si y sólo si ninguna recta vertical intercepta a la curva más de una vez
 Función Una función f de un conjunto D a un conjunto E, es una regla de correspondencia que asigna a cada elemento x de D un elemento único y de E. Características de las funciones Dominio de una función:
Función Una función f de un conjunto D a un conjunto E, es una regla de correspondencia que asigna a cada elemento x de D un elemento único y de E. Características de las funciones Dominio de una función:
Reconocimiento de imágenes
 Capítulo 4 Reconocimiento de imágenes En la actualidad, el reconocimiento de imágenes es una herramienta de gran utilidad en el área de control y automatización. Varias empresas usan el reconocimiento
Capítulo 4 Reconocimiento de imágenes En la actualidad, el reconocimiento de imágenes es una herramienta de gran utilidad en el área de control y automatización. Varias empresas usan el reconocimiento
Estructuras algebraicas. Departamento de Álgebra. Apuntes de teoría
 ESTRUCTURAS ALGEBRAICAS GRADO EN MATEMÁTICAS. CURSO 2015/2016 Apuntes de teoría Tema 1: Grupos y subgrupos. 1.1. Introducción Definición 1.1. Un grupo es un par (G, ), donde G es un conjunto no vacío,
ESTRUCTURAS ALGEBRAICAS GRADO EN MATEMÁTICAS. CURSO 2015/2016 Apuntes de teoría Tema 1: Grupos y subgrupos. 1.1. Introducción Definición 1.1. Un grupo es un par (G, ), donde G es un conjunto no vacío,
Álgebra Booleana y Diseño Lógico. Circuitos Digitales, 2º de Ingeniero de Telecomunicación. EITE ULPGC.
 Álgebra Booleana y Diseño Lógico Circuitos Digitales, 2º de Ingeniero de Telecomunicación. EITE ULPGC. Índice 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. Propiedades algebraicas Definición axiomática de álgebra
Álgebra Booleana y Diseño Lógico Circuitos Digitales, 2º de Ingeniero de Telecomunicación. EITE ULPGC. Índice 1. 2. 3. 4. 5. 6. 7. 8. 9. 10. 11. Propiedades algebraicas Definición axiomática de álgebra
ANEXO C: ALGORITMOS DE INTERSECCIÓN
 ANEXO C: ALGORITMOS DE INTERSECCIÓN El corazón de cualquier modelo de trazado de rayos es el de los algoritmos de la intersección entre los rayos y los objetos del ambiente. En un proceso general de trazado
ANEXO C: ALGORITMOS DE INTERSECCIÓN El corazón de cualquier modelo de trazado de rayos es el de los algoritmos de la intersección entre los rayos y los objetos del ambiente. En un proceso general de trazado
CIRCUITOS LÓGICOS. Lógica FCE 1. ALGEBRA DE BOOLE
 Lógica FE IRUITOS LÓGIOS 1. LGER DE OOLE 1.1 Introducción Tanto la teoría de conjuntos como la lógica de enunciados tienen propiedades similares. Tales propiedades se utilizan para definir una estructura
Lógica FE IRUITOS LÓGIOS 1. LGER DE OOLE 1.1 Introducción Tanto la teoría de conjuntos como la lógica de enunciados tienen propiedades similares. Tales propiedades se utilizan para definir una estructura
Morfología Matemática en Imágenes
 8 de mayo de 2013 Morfología Estudio de la forma y la estructura Es una técnica de procesado no lineal de la imagen, interesada en la geometría de los objetos contenidos en una escena segmentada (usualmente
8 de mayo de 2013 Morfología Estudio de la forma y la estructura Es una técnica de procesado no lineal de la imagen, interesada en la geometría de los objetos contenidos en una escena segmentada (usualmente
Simplificación de funciones lógicas utilizando Karnaugh
 Simplificación de funciones lógicas utilizando Página Objetivos de la simplificación Objetivo: minimizar el costo de la función lógica Medición del costo y otras consideraciones Número de compuertas Número
Simplificación de funciones lógicas utilizando Página Objetivos de la simplificación Objetivo: minimizar el costo de la función lógica Medición del costo y otras consideraciones Número de compuertas Número
Álgebra Booleana. Suma Booleana. El término suma es 1 si al menos uno de sus literales son 1. El término suma es 0 solamente si cada literal es 0.
 Álgebra Booleana El álgebra de Boole son las matemáticas de los sistemas digitales. En el nivel de lógica digital de una computadora, lo que comúnmente se llama hardware y que está formado por los componentes
Álgebra Booleana El álgebra de Boole son las matemáticas de los sistemas digitales. En el nivel de lógica digital de una computadora, lo que comúnmente se llama hardware y que está formado por los componentes
Procesamiento Digital de Imágenes
 Visión or Comutadora Unidad III Procesamiento Digital de Imágenes Rogelio Ferreira Escutia Contenido 1) Oeraciones Individuales a) Transformaciones Punto a Punto b) Transformaciones de 2 Imágenes Punto
Visión or Comutadora Unidad III Procesamiento Digital de Imágenes Rogelio Ferreira Escutia Contenido 1) Oeraciones Individuales a) Transformaciones Punto a Punto b) Transformaciones de 2 Imágenes Punto
Capítulo 3. 3. Marco Teórico.
 Capítulo 3 3. Marco Teórico. La visión artificial o visión por computador se define como un área multidisciplinar que pretende, en cierta medida, reproducir artificialmente el sentido de la vista mediante
Capítulo 3 3. Marco Teórico. La visión artificial o visión por computador se define como un área multidisciplinar que pretende, en cierta medida, reproducir artificialmente el sentido de la vista mediante
Este trabajo debe realizarce después de haber trabajado el taller virtual
 Este trabajo debe realizarce después de haber trabajado el taller virtual qué se encuentra en la http://ceciba.escuelaing.edu.co/mre página bajo la pestaña de Talleres Virtuales.. Para las guientes funciones:
Este trabajo debe realizarce después de haber trabajado el taller virtual qué se encuentra en la http://ceciba.escuelaing.edu.co/mre página bajo la pestaña de Talleres Virtuales.. Para las guientes funciones:
3. Espacios de color. 3.Espacios de color. El uso del color en el procesamiento de imágenes está principalmente motivado por dos factores:
 3. Espacios de color El uso del color en el procesamiento de imágenes está principalmente motivado por dos factores: El color es un poderoso descriptor que, en la mayoría de los casos simplifica la identificación
3. Espacios de color El uso del color en el procesamiento de imágenes está principalmente motivado por dos factores: El color es un poderoso descriptor que, en la mayoría de los casos simplifica la identificación
Tema 4:Segmentación de imágenes
 Tema 4:Segmentación de imágenes La segmentación de imágenes divide la imagen en sus partes constituyentes hasta un nivel de subdivisión en el que se aíslen las regiones u objetos de interés. Los algoritmos
Tema 4:Segmentación de imágenes La segmentación de imágenes divide la imagen en sus partes constituyentes hasta un nivel de subdivisión en el que se aíslen las regiones u objetos de interés. Los algoritmos
Fila: Es un conjunto de varias celdas dispuestas en sentido horizontal.
 Que Es Excel? Excel es un programa que permite la manipulación de libros y hojas de calculo. En Excel, un libro es el archivo en que se trabaja y donde se almacenan los datos. Como cada libro puede contener
Que Es Excel? Excel es un programa que permite la manipulación de libros y hojas de calculo. En Excel, un libro es el archivo en que se trabaja y donde se almacenan los datos. Como cada libro puede contener
Números reales Conceptos básicos Algunas propiedades
 Números reales Conceptos básicos Algunas propiedades En álgebra es esencial manejar símbolos con objeto de transformar o reducir expresiones algebraicas y resolver ecuaciones algebraicas. Debido a que
Números reales Conceptos básicos Algunas propiedades En álgebra es esencial manejar símbolos con objeto de transformar o reducir expresiones algebraicas y resolver ecuaciones algebraicas. Debido a que
SECCIÓN 7.3 INTRODUCCION A VECTORES. Capítulo 7
 SECCIÓN 7.3 INTRODUCCION A VECTORES Capítulo 7 Introducción Cantidades tales como área, volumen, longitud, temperatura y tiempo se componen únicamente de una magnitud y se pueden describir completamente
SECCIÓN 7.3 INTRODUCCION A VECTORES Capítulo 7 Introducción Cantidades tales como área, volumen, longitud, temperatura y tiempo se componen únicamente de una magnitud y se pueden describir completamente
Capítulo 6. Aplicaciones
 Capítulo 6 Aplicaciones Procesamiento Morfológico de Imágenes en Color. Aplicación a la Reconstrucción Geodésica 6.1 Introducción En este capítulo se presentan diferentes aplicaciones de la reconstrucción
Capítulo 6 Aplicaciones Procesamiento Morfológico de Imágenes en Color. Aplicación a la Reconstrucción Geodésica 6.1 Introducción En este capítulo se presentan diferentes aplicaciones de la reconstrucción
T7. PROGRAMACIÓN LINEAL
 T7. PROGRAMACIÓN LINEAL MATEMÁTICAS PARA 4º ESO MATH GRADE 10 (=1º BACHILLERATO EN ATLANTIC CANADA) CURRÍCULUM MATEMÁTICAS NOVA SCOTIA ATLANTIC CANADA TRADUCCIÓN: MAURICIO CONTRERAS PROGRAMACIÓN LINEAL
T7. PROGRAMACIÓN LINEAL MATEMÁTICAS PARA 4º ESO MATH GRADE 10 (=1º BACHILLERATO EN ATLANTIC CANADA) CURRÍCULUM MATEMÁTICAS NOVA SCOTIA ATLANTIC CANADA TRADUCCIÓN: MAURICIO CONTRERAS PROGRAMACIÓN LINEAL
Matemáticas UNIDAD 7 CONSIDERACIONES METODOLÓGICAS. Material de apoyo para el docente. Preparado por: Héctor Muñoz
 CONSIDERACIONES METODOLÓGICAS Material de apoyo para el docente UNIDAD 7 Preparado por: Héctor Muñoz Diseño Gráfico por: www.genesisgrafica.cl TEOREMAS RELATIVOS A ÁNGULOS UNIDAD 6 TEOREMAS RELATIVOS A
CONSIDERACIONES METODOLÓGICAS Material de apoyo para el docente UNIDAD 7 Preparado por: Héctor Muñoz Diseño Gráfico por: www.genesisgrafica.cl TEOREMAS RELATIVOS A ÁNGULOS UNIDAD 6 TEOREMAS RELATIVOS A