Capítulo V Dinámica del cuerpo rígido
|
|
|
- Carla San Martín Rey
- hace 6 años
- Vistas:
Transcripción
1 Capítulo V Dnámca del cuerpo rígdo 5. Dnámca de un sstema de masas puntuales Hasta el momento hemos estudado la nteraccón de dos cuerpos puntuales. Corresponde ahora analzar lo que ocurre cuando tenemos más de dos cuerpos puntuales en nteraccón mutua (por ejemplo, cuerpos undos medante elástcos, con cargas eléctrcas o en atraccón gravtatora mutua). Supondremos, para lo que sgue, que la nteraccón mutua entre dos cuerpos, cualesquera de un sstema de n cuerpos es ndependente de los restantes cuerpos del sstema (ndependente de su masa, su poscón, su velocdad, etc.). En otras palabras, supondremos que la nteraccón entre dos de los cuerpos no puede ser nfluda por la presenca de las nteraccones con los otros cuerpos. Éste es un prncpo, váldo para el caso de las nteraccones dscutdas en este curso. La experenca muestra que en ese caso basta con sumar, para cada cuerpo, los efectos parcales de nteraccón con cada uno de los demás componentes del sstema. Fgura 5. Comenzamos con un sstema de cuatros masas como se muestra en la Fgura 5.. Sobre la masa m actuará una fuerza total donde 4 f 3 4 m a F (5.) f es la fuerza de nteraccón parcal con la masa m, f con la masa m 3 y f con la masa m 4. Por otra parte, sobre el cuerpo actúa una fuerza parcal: f f (5.) (prncpo de accón y reaccón), que representa su nteraccón sobre el cuerpo ; lo msmo se extende a los demás cuerpos. Podemos escrbr en forma sstemátca las fuerzas que actúan en ese sstema de cuerpos puntuales, como sgue: Sobre m : F m a Sobre m : F m a Sobre m : F 3 3 m a 3 3 f 3 4 f f 34 3 f f + (5.3) 68
2 Sobre m4 : F4 m4 a4 f Sumando vectoralmente y agrupando convenentemente las fuerzas parcales, resulta F + F + F ( f ) + ( f + ( f 4 4 ) + ( f 34 por ser nulo cada uno de los paréntess. Con un sstema de n cuerpos tendríamos 3 m a + m La (5.5) puede escrbrse en la forma + f n a + m 3 3 n F a + m m 4 ) + ( f ) 0 a a f 4 ) + ( f 3 3 ) + (5.4) 0 (5.5) d d d P m v P 0 (5.5.a) O sea, el mpulso lneal total del sstema es constante, cualquera sea la nteraccón entre masas: m v P P cte. m v (5.6) El mpulso lneal tambén es una constante de movmento para un sstema de n cuerpos en nteraccón. Además cada una de las fuerzas f k está sobre la recta que une la masa con la masa k, tendremos, tomando momentos respecto de un punto fjo cualquera y recordando la (4.34): Entonces 0 r f + r f 0 ; r3 f 34 + r4 f 43 0 etc. r F r m a M r F + r F + 0 (5.7) Esta es la forma generalzada de la (4.34). Recordando la defncón de mpulso angular Es decr d d L r m v v m v + r m a r m a 0 L L 0 r m v 0 (5.8) cte. r m v (5.9) El mpulso angular es constante, cualquera sea la nteraccón entre las dos masas. Fnalmente en la expresón del mpulso (5.6) podemos escrbr: d P m v m r cte. (5.0) Es decr, s m es la masa total del sstema, entonces m 0 69
3 P m d m m r d r C V C cte. (5.0 a) Tal como vmos en la (4.7.b) el vector r C ubca la poscón del centro de masa del sstema; punto que es determnado unívocamente por la poscón de las masas, y cuya velocdad es, entonces, constante, cualquera sea la nteraccón entre las masas del sstema. Fgura 5. Sea ahora un sstema de puntos materales en nteraccón que es parte de uno más amplo: Por ejemplo, el sstema formado por los cuerpos,, 3 y 4 de la Fgura 5., que forma parte de uno más amplo que ncluye además los cuerpos 5, 6, 7, 8,.. La suma de las fuerzas sobre ese sstema parcal (el que contene sólo los cuerpos,, 3 y 4 ) es: F + F + F 3 m a + m a + m 3 a + m ( f ) + ( f + f ) ( f 3+ f ) + ( f 4+ f ) [ f ] + [ f3 3] + [ f4 4] + [ f 3 3 ] + [ f 4 4 ] + [ f ( f ) + ( f ) + ( f ) + ( f ) ( f5 6 + ) + ( f ) + ( f ) + ( f a 4 + ) R ] + (5.) En la (5.) los pares entre corchetes se anulan mutuamente por el prncpo de accón y reaccón. Esas fuerzas se denomnan fuerzas nterores del sstema parcal. Las fuerzas de nteraccón con los cuerpos 5, 6, 7, 8,.., que no pertenecen al sstema parcal consderado, se denomnan fuerzas exterores. R es la resultante de las fuerzas exterores. En con secuenca, 4 4 d d P R m a m v (5.) 70
4 En la expresón (5.) P 4 m v es el mpulso total del sstema parcal de los cuerpos,, 3 y 4. Esta expresón nos dce que la resultante de las fuerzas exterores sobre un sstema determna la dervada del mpulso lneal total del sstema respecto del tempo. Las fuerzas nterores no partcpan de la varacón del mpulso total. En general, para modfcar el mpulso lneal de un sstema de n cuerpos es necesaro que actúen fuerzas exterores. Un sstema lbre de fuerzas exterores tene mpulso total constante. Por otra parte, tenendo en cuenta la (5.0 a), tenemos dv R m C (5.3) Es decr, para modfcar el movmento del centro de masa de un sstema de n cuerpos, es necesaro que actúen fuerzas exterores. Observe con cudado lo sguente: la aceleracón y la varacón del mpulso de cada una de las masas asladas m, m, m3 y m4 están determnados por la accón conjunta de las fuerzas exterores y las nterores que actúan sobre cada una. En cambo, la varacón del mpulso total (y de la velocdad del centro de masa) está determnada por las fuerzas exterores exclusvamente. Hacendo el msmo razonamento para el momento de las fuerzas sobre el sstema en consderacón, llegamos a la conclusón sguente: r m a r f + r f + r f3 + r3 f r f5 + r f6 + + r f5 + r f6 + + (5.4) r f5 r f 6 r f5 r f M donde M es el momento resultante de las fuerzas exterores (momento exteror). Por lo tanto, de acuerdo con la (5.8), tenemos d d L M r m v (5.4 a) Esto quere decr, que la varacón del mpulso angular total de un sstema de n cuerpos está dada por el momento de las fuerzas exterores. Las fuerzas nterores partcpan en la varacón del mpulso angular de cada una de las masas ndvduales, pero no en la varacón del mpulso angular total. Fnalmente podemos observar que toda fuerza exteror sobre un sstema es fuerza nteror de un sstema más amplo, del cual el prmero forma parte. 5. Cnemátca del cuerpo rígdo Un cuerpo rígdo es un cuerpo cuyos puntos se mantenen a dstancas nvarables entre sí, por grandes que sean las fuerzas que sobre el cuerpo actúan. Esto representa la condcón de rgdez. Un cuerpo de este tpo sólo exste en condcones deales, aunque en muchos casos es posble aproxmar el comportamento de un cuerpo sóldo al de un cuerpo deal rígdo. S dvdmos el cuerpo rígdo en celdas de volumen nfntesmal δ V, como muestra la Fgura 5.3, podemos consderar al msmo como un sstema de masas puntuales (representadas por las celas) rígdamente undas entre sí, y aplcar, por lo tanto, las relacones dnámcas (5.), (5.3) y (5.4 a). 7
5 Sea δ m la masa de una de las celdas δ V. S el volumen es lo sufcentemente pequeño, pero no tanto como para entrar en el domno molecular, esa masa será proporconal a δ. La constante de proporconaldad V δ m ρ lm δ V para δv sufcentemente pequeño (5.5) se denomna densdad del cuerpo. Fgura 5.3 Convene hacer en este punto una aclaracón mportante y que frecuentemente se obva en los lbros de texto. Una cantdad como δv no es estrctamente un dferencal en el sentdo matemátco (que puede ser arbtraramente pequeño por hpótess). El volumen δv debe ser lo sufcentemente pequeño, para que valga la relacón lneal δ m ρ δv dentro del error expermental; pero no tan pequeño como para entrar en el domno molecular donde tal relacón no es válda. En el domno molecular el valor correspondente a δ m puede varar bruscamente según se ncluya o se excluya una determnada molécula. Para la resolucón de problemas concretos fuera del domno molecular, se asoca a δv un dferencal matemátco dv, y se procede tal como s la relacón lneal dm ρ dv fuese válda en el límte δ V 0 sn restrccones (es decr, como s la matera fuese contnua). Muchas veces una cantdad como δv se la denomna dferencal físco, pero tal nombre desagrada a los matemátcos (con mucha razón). Por últmo debemos notar que la densdad ( ρ ) es un cocente dferencal (5.5), pero no una dervada, pues no exste nnguna funcón m m(v ). La masa total de un cuerpo estará entonces dada por m lm δv 0 δm lm ρ δv n δv 0, n ρ dv (5.6) Ésta es una ntegral de volumen. Lo mportante en la defncón de esta ntegral es que el valor del límte no depende de la forma partcular en que se ha hecho la subdvsón en celas. El centro de masa de un cuerpo estará defndo por lm δm r lm ρ r δv δv 0 r dv ρ rc (5.7) m m m Observemos que la ntegral de volumen ρ r dv representa un vector cuyas componentes son 7
6 ρ x dv, ρ y dv, ρ z dv (5.8) El centro de masa de cuerpos homogéneos; es decr, aquellos cuerpos en los cuales ρ cte., concde con el centro de la fgura (es decr el punto geométrco donde se cortan las rectas (ejes) o planos de smetría). S el cuerpo no es homogéneo ( ρ depende de x, y, z ) puede estar en cualquer parte. Pese a que se han resuelto problemas smlares en la práctca, veamos el sguente ejemplo para aprender a resolver estas ntegrales de volumen: Ejemplo I: Queremos calcular el centro de masa de un cono maczo crcular, homogéneo. Stuemos el sstema de coordenadas como se muestra en la Fgura 5.4. Fgura 5.5 Por lo menconado anterormente para cuerpos homogéneos, el centro de masa debe estar sobre el eje de smetría (eje z). Para hallar su poscón, basta aplcar la (5.7) para la coordenada z z C ρ z dv ρ dv Como ρ cte. (cuerpo homogéneo), podemos dvdr el cuerpo en elementos de volumen defndos por los clndros (rebanadas en forma de dscos) de altura dz y rado r. Observando los trángulos semejantes que se forman en la Fgura 5.4, tenemos: r h z R o sea r ( h z) R h h Entonces el volumen de cada rebanada dferencal es: R dv π r dz π ( h z) dz h y m ρ dv ρ π R dv ρ ( h z) dz h h 0 π R ρ 3 donde transformamos la ntegral de volumen en una ntegral smple. Entonces, es el volumen del cono. Por otra parte π R h h π R h 4 h ρ z dv ρ ( h z) z dz ρ 0 h π R h ρ π R h 3 73
7 Obtenendo fnalmente h z C 4 En el caso general de un cuerpo no smétrco o un cuerpo smétrco pero no homogéneo, no se puede reducr la ntegral de volumen a una ntegral smple. En esos casos, la ntegral de volumen es una ntegral trple. En muchos textos es posble encontrar tablas para la poscón del centro de masa en los cuerpos geométrcos más comunes. Para un cuerpo rígdo exsten las sguentes posbldades de movmento:. Traslacón pura: todo punto del cuerpo tenen el msmo vector velocdad.. Rotacón pura: el cuerpo rota alrededor de un eje dado (dos puntos dferentes ya no tenen la msma velocdad). 3. Movmento roto-traslatoro: superposcón de una rotacón y una traslacón, o sea, una rotacón alrededor de un eje cuyos puntos a su vez se desplazan todos con la msma velocdad. Consderemos en prmer lugar, el movmento de rotacón alrededor de un eje fjo. En este caso cada punto del cuerpo tene una velocdad que depende de la poscón relatva de este respecto del eje. Estamos en presenca de un campo de velocdades: a cada punto del cuerpo le corresponde un vector velocdad determnado. Consderando un plano perpendcular al eje de rotacón, ese campo de velocdades tene el aspecto de la Fgura 5.5. Los puntos se mueven en crcunferencas concéntrcas respecto del eje. Fgura 5.5 La condcón de rgdez (dstanca nvarable entre dos puntos cualesquera) exge que todos los puntos roten el msmo ángulo en el ntervalo de tempo δ t. Eso quere decr que todos los puntos tendrán la msma velocdad angular alrededor del eje. Es fácl comprobar, basado en la defncón del vector velocdad angular ((.45) Ω ( r v) / r ), que la velocdad de un punto del cuerpo estará dada por (Fgura 5.6): v Ω r (5.9) 74
8 Fgura 5.6 donde r es el vector poscón del punto en cuestón respecto a un punto stuado en el eje. El vector velocdad angular es el msmo para todos los puntos. En partcular los v puntos del eje tenen 0. Por otra parte, podemos observar que el vector r puede ser el vector poscón respecto de cualquer punto O del eje de rotacón. Efectvamente, de la observacón de la Fgura 5.7, tenemos que Ω OO' + Ω r Ω r, ya que Ω ' r Ω OO' + r, entonces r ' es paralelo a OO' y en consecuenca Ω OO ' 0. Fgura 5.7 La expresón (5.9) muestra que el campo de velocdades de un cuerpo rígdo en rotacón pura está íntegramente determnado por el vector velocdad de rotacón. S a este movmento de rotacón pura le superponemos un movmento de traslacón caracterzado por la velocdad v 0 (que es la msma para todos los puntos del cuerpo), como en el caso de la Fgura 5.8, la velocdad de cada punto del cuerpo rígdo será, de acuerdo con la superposcón de movmentos ndependentes (.48) : Ω r + v0 v (5.0) La (5.0) representa la expresón del campo de velocdades para un movmento rototraslatoro. Observemos que la velocdad de traslacón 0 v es la velocdad de los puntos del eje de rotacón. La expresón (5.0) es la forma más general del movmento de un cuerpo rígdo; toda otra forma del campo de velocdades volaría la condcón de rgdez. 75
9 Fgura 5.8 Esto puede ser vsto en forma senclla sí analzamos un par de puntos cualesquera del cuerpo rígdo, en movmento roto-traslatoro, que denomnaremos puntos y (Fgura 5.9). Fgura 5.9 La dferenca entre sus vectores velocdades será, de acuerdo a la 5.0), v v Ω ( r r) (dado que la velocdad de traslacón es la msma para ambos r, tendremos: ( v v ) ( r r ) [ Ω ( r r )] ( r r ) 0 (5.) [ Ω ( r )] ( r r [ Ω ( r )] ( r r ( v v ) ( r r ) ( r, o sea que la proyeccón puntos). S multplcamos escalarmente por el vector dferenca r El doble producto r ) es nulo porque r ). Veamos que sgnfca la expresón 0. La msma nos dce que r v ( r ) v r ) V (observe la Fgura 5.8) del vector v sobre la recta que une los dos puntos ( y ) es gual (en módulo y sentdo) a la proyeccón de v sobre la msma recta. Pero esto sgnfca justamente que el punto y el punto no se alejan n se acercan mutuamente, sno que mantenen la dstanca entre ellos nvarable (condcón de rgdez). Es fácl comprender entonces que cualquer 76
10 térmno vectoral avo en la (5.0), que sea funcón de la poscón, haría volar la condcón de rgdez. El estado más general de un cuerpo rígdo está defndo por los vectores característcos v 0 y Ω, conocdos los cuales el movmento que da íntegramente determnado. Fnalmente a partr de la relacón (5.0), es sencllo deducr que todos los puntos que están sobre una recta paralela al eje de rotacón (paralela a Ω ) tenen la msma velocdad. Efectvamente, s P y P son dos puntos sobre una recta paralela a Ω (ver Fgura 5.0), tenemos y por ser Ω ' PP. v P ' v 0 + Ω r v P v 0 ' + Ω r v 0 + P ' + Ω ( r + PP ) v 0 Ω r v (5.) Fgura 5.0 Ejemplo II: Veamos un ejemplo práctco de movmento roto-traslatoro Imagínese que le pden dseñar una hélce de un avón lvano de uso cvl, que gre a 400 rpm. (revolucones por mnuto). La velocdad de avance del avón en vuelo debe ser de 75.0 m/seg (70 Km/h)., y la velocdad de las puntas de las paletas de la hélce en el are no debe superar por cuestones técncas los 70 m/seg (Esto representa aproxmadamente 0.8 veces la velocdad del sondo en el are). S las puntas se moveran con la velocdad del sondo el rudo sería tremendo. Mantenendo una velocdad relatvamente menor (de 0.8 veces la velocdad del sondo) el rudo se consdera aceptable. Entonces usted debe decdr: a) Qué rado máxmo puede tener la hélce? b) Con dcho rado cual sería la velocdad de las puntas de las hélces? Como muestra la Fgura 5., la velocdad v Total de una partícula en la punta de la hélce será la suma vectoral de su velocdad tangencal debda a la rotacón, v P, dada r por vp Ω y la velocdad de avance del avón v A 75.0 m/seg. La resultante no debe exceder los 70 m/seg. Lo prmero que debemos hacer es convertr Ω 400 rpm a radanes/seg 77
 (75.0 m / seg) 5 rad / seg.")

11 π radanes Ω 400 rpm (400) 5 rad / seg 60segundos Fgura 5. Basándonos en la Fgura 5. b, tenemos que: v v + v v + r Ω Entonces, s v 70 m / seg Total Total A P A r vtotal v vtotal v A A r Ω Ω (70 M / seg) (75.0 m / seg) 5 rad / seg.03m La aceleracón centrípeta será: a Ω r (5 rad / seg) (.03 m) m / seg cent 4 Ejemplo III: Qué relacón exste entre las velocdades angulares de las ruedas dentadas de la bccleta de la Fgura 5.? Fgura 5. La cadena de la bccleta no resbala n se estra, así que se mueve con la msma velocdad tangencal en ambas ruedas. Por la ecuacón (5.0), suponendo que v 0 0, tenemos que: 78
12 ω r v r ω rω entonces ω r La velocdad angular es nversamente proporconal al rado. Esto se cumple tambén para poleas conectadas con una correa, sempre que la correa no resbale. En el caso de ruedas dentadas, los dentes deben estar adecuadamente equespacados en su crcunferenca para que la cadena calce perfectamente en los msmos. Sean N y N el número de dentes para la rueda dentada y respectvamente. La condcón de que los dentes estén equespacados sobre ambas ruedas mplca que: π r π r r N es decr N N r N Combnando esta ultma ecuacón con la anteror, tenemos ω N ω N La velocdad angular de cada rueda dentada es nversamente proporconal al número de dentes. En una bccleta de varas velocdades, obtenemos la máxma velocdad angular ω de la rueda trasera para un dado pedaleo (certa ω ), cuando el cocente N / N es máxmo; esto mplca utlzar la rueda dentada delantera de mayor rado ( N máxmo) y la rueda dentada trasera de menor rado ( N mínmo). Sea el caso de un clndro que rueda sn deslzar sobre un plano Este movmento lo podemos consderar como un movmento de rotacón alrededor del eje del clndro, al cual está superpuesto el movmento de traslacón del eje, con velocdad v 0 (Fguras 5. a y b) Es decr todo punto del clndro tendrá una velocdad v Ω r + v0 vector Ω no es arbtraro, queda fjado por la condcón de que los puntos del clndro en contacto con el plano tengan velocdad nula (rodamento sn deslzamento (sn resbalar)): vq 0 v0 + Ω rq. Como r Ω Q, resulta para el módulo de Ω que Ω v r. 0 / Q. El Fgura 5. a Notemos que este movmento tambén se puede consderar como una rotacón nstantánea pura alrededor de de la línea de contacto, con la msma velocdad angular Ω (Fgura 5. b). Obsérvese que en este caso, en un nstante δ t posteror, el eje de 79
13 rotacón es otro (determnado por nueva recta de contacto). Por eso se dce que se trata ' de un eje nstantáneo. La velocdad de un punto cualquera es ahora v Ω r, donde ' r es la poscón respecto de un punto sobre el eje nstantáneo de rotacón (línea de contacto). El resultado de este ejemplo, en el cual se ha descrpto un msmo movmento en dos formas dferentes, se puede generalzar. Fgura 5. b Sea un movmento roto-traslatoro cualquera, caracterzado por un vector rotacón Ω y velocdad v 0 de traslacón. Las velocdades de dos puntos P y Q serán: vp v0 + Ω rp (5.3) v v + Ω r Q 0 Q Fgura 5.3 ' ' Pero de acuerdo a la Fgura 5.3, rq rp + rq, donde r Q es la poscón de Q respecto de P. Entonces, ' ' v v + Ω r + v + Ω r v + Ω r (5.4) Q 0 P 0 Q P Q Pero el últmo membro representa un movmento roto-traslatoro alrededor de un eje paralelo al anteror, que pasa por el punto P, de la msma velocdad angular Ω y de una velocdad de traslacón dada por la velocdad del punto P. En este caso se dce que el movmento del cuerpo rígdo está referdo al punto P. En resumen, hay una nfndad de posbldades para descrbr un movmento roto-traslatoro dado: cualquer recta paralela a la dreccón Ω puede ser consderada como eje nstantáneo de rotacón, con 80
14 tal de añadr una traslacón, dada por la velocdad e los puntos de ese eje nstantáneo. En partcular, un movmento rotatoro puro, puede ser consderado como un movmento roto-traslatoro alrededor de un eje nstantáneo dstnto (pero paralelo) al orgnal. Como el centro de masa es un punto notable del cuerpo rígdo, es muy útl tomarlo como punto de referenca del movmento del cuerpo rígdo. Por lo tanto convendrá descrbr todo movmento roto-traslatoro como una rotacón nstantánea alrededor de un eje que pase por el centro de masa y una traslacón de ese eje (Fgura 5.4). La velocdad de traslacón es, entonces, la velocdad del centro de masa. Fgura 5.4 La velocdad de un punto cualquera es: vp vc +Ω rp (5.0 a) S, fnalmente, a un movmento rotatoro puro le superponemos otro movmento rotatoro, con un eje que corta al anteror, como el caso de la Fgura 5.5, el movmento resultante será otro movmento rotatoro puro, con una velocdad angular Ω Ω + Ω (5.5) Fgura 5.5 8
15 con un eje de rotacón paralelo a Ω que pasa por el punto de nterseccón. Observando con cudado la Fgura 5.5, observamos que el eje de rotacón de Ω es fjo; mentras que el eje de rotacón resultante dado por Ω, así como el de Ω no están fjos en el espaco (ya que ambos rotan con velocdad angular Ω alrededor del eje fjo de Ω ). Este ejemplo de superposcones de rotacones pone en evdenca el carácter vectoral de la velocdad angular. 5.3 Ecuacones de movmento y varables dnámcas del cuerpo rígdo Trataremos de determnar el movmento de un cuerpo rígdo en funcón del sstema de fuerzas exterores que actúan sobre él. Regresando a la magen del cuerpo rígdo como un sstema de muchísmos cuerpos puntuales representados por celdas δ V (Fgura 5.3), de masa δ m ρ δv, valdrán las ecuacones (5.) y (5.4 a): d P R Fext (5.6) d L M M ext (5.7) R es la resultante de las fuerzas exterores que actúan sobre el cuerpo, M es el momento de esas fuerzas respecto de un punto fjo O. Mentras que P y L son el mpulso lneal total y el mpulso angular total respecto del msmo punto O, respectvamente. En estas ecuacones ntervene tanto el mpulso lneal como el angular del cuerpo rígdo. Es necesaro encontrar la relacón entre ellos y el estado del cuerpo rígdo. En el caso del mpulso lneal resulta bastante sencllo. Tenendo en cuenta la (5.0 a), obtenemos la relacón entre el mpulso lneal del cuerpo rígdo y la velocdad de su centro de masa: P mv C (5.8) A título de ejercco llegaremos a la relacón (5.8) partendo de la expresón (5.0 a), v v +Ω r, del movmento referdo al centro de masa (Fgura 5.4). En efecto, el P C P mpulso total del sstema de masas δ m será, por defncón: P δ m v ρ δv ( v + Ω r ) C r es el vector poscón de la celda δ V desde el centro de masa. Tendendo al límte cuando δv 0 tendremos: P ρ ( v + Ω r) dv v ρ dv +Ω ρ r dv (recuérdese que C c c v y Ω son ndependente del punto en cuestón). Por otra parte r dv ρ dv m, masa total, y tenendo en cuenta (5.7) ( r C ) tenemos que m ρ 8
16 m r C ρ r dv 0 (5.9) Por estar el centro de masa en el orgen ( r C 0 ). Entonces arrbamos a la relacón (5.8) P mv C. Corresponde estudar ahora el mpulso angular total L de un cuerpo rígdo en funcón de su movmento. Tomemos nuevamente el caso de un cuerpo dvddo en celdas nfntesmales y tomamos momentos respecto del centro de masa, tenemos: L r δ m v r ρ δ r ( vc + Ω r (5.30) En el límte δv 0 nos queda la (5.30) en forma ntegral: L [ ρrdv ] v + ρr ( Ω r) dv La prmera ntegral de (5.3) es nula por (5.9), nos queda entonces: L ρr ( Ω r) dv C (5.3) (5.3) Esta ntegral (5.3) del doble producto vectoral ofrece certas dfcultades (cálculo tensoral) que no pueden ser resueltas en un curso de físca elemental. Lo mportante es observar que el momento angular L depende unívocamente de la velocdad angular Ω del cuerpo rígdo. El mpulso angular de un cuerpo rígdo depende del punto que se elge como centro de momentos. En la expresón (5.3) habíamos tomado como centro de momentos el centro de masa. S ahora se camba de punto de referenca, se tendrá de acuerdo a la Fgura 5.5: L ' r δ m v ( r + rc ) δ m v (5.33) r δ m v + r δ m v C O sea, el mpulso angular referdo al punto O estará relaconado con el mpulso angular respecto del centro de masa en la forma L ' L + r P (5.34) C Obsérvese que s el mpulso lneal es nulo (centro de masa en reposo), el mpulso angular es el msmo respecto de cualquer punto. Fgura
17 El térmno r P C se suele denomnar mpulso angular orbtal del cuerpo rígdo, respecto del punto en cuestón (porque representa el mpulso angular que tendría una partícula de la msma masa, que sgue la msma trayectora que el centro de masa del cuerpo). Generalmente al mpulso angular L respecto del centro de masa se lo suele llamar mpulso angular propo o smplemente spn del cuerpo. Vamos a mostrar ahora, medante un ejemplo sencllo, que L tene en general una dreccón dferente de la del vector Ω, o sea, dferente del eje nstantáneo de rotacón. Fgura 5.7 Consderaremos un cuerpo rígdo smple, que consta de dos masas puntuales, undas por una barra rígda de masa desprecable, y que gran alrededor de un eje fjo que pasa por su centro de masa, C (Fgura 5.7). Es fácl ver que el mpulso angular de la masa m, respecto de C, dado por L r m v está contendo en el plano defndo por los puntos P y P (correspondentes a las poscones de las masas m y m respectvamente) y el vector Ω, sendo perpendcular a la recta que une P con P. Por su parte L tene la. El mpulso angular total ( ) forma, por msma dreccón y sentdo que L LTotal L + L lo tanto, un ángulo π / α con el eje de rotacón (ver Fgura 5.6). Úncamente s el eje de rotacón es perpendcular a la recta que une P con P, resulta que paralelo a Ω (y del msmo sentdo) (Fgura 5.8). es LTotal Fgura
18 Este resultado vale en general para un cuerpo de forma arbtrara, pues basta con consderar los mpulsos angulares de los elementos de volumen δ V. La dreccón del mpulso angular no concde en general con el vector velocdad angular, o sea, con el eje de rotacón. A partr de la fórmula (5.3), L ρr ( Ω r) dv, calcularemos la proyeccón L Ω del mpulso sobre el eje Ω : L ρ[ r ( Ω r)] dv Ω Ω (5.35) Fgura 5.9 Sea un elemento de volumen dv, como se muestra n la Fgura 5.9, de masa dm ρ dv. El vector que aparece en el ntegrando tendrá como módulo X r Ω r, pues ( Ω r) r (el vector ( Ω r) es perpendcular a r ). Sn embargo, Ω r Ω r senα. En consecuenca, X Ω r senα. La dreccón y el sentdo están ndcados en la Fgura 5.9. La proyeccón sobre el eje de Ω será entonces: π [ r ( Ω r)] Ω X Ω Ω r senα cos( α) Ω r sen α Ωξ (5.36) donde ξ es la dstanca del elemento de volumen al eje de rotacón. Por lo tanto L Ω I Ω (5.37) donde I ρ ξ dv (5.38) es el momento de nerca del cuerpo respecto del eje de rotacón. La relacón (5.37) es de gran utldad para los casos de movmentos de un cuerpo rígdo con un eje fjo; estos casos son los más frecuentes en la técnca. Obsérvese que el concepto de momento de nerca es avo: el momento de nerca respecto de un eje de dos cuerpos undos rígdamente entre sí es la suma de los momentos de nerca de los cuerpos ndvduales respecto del msmo eje. S el eje de rotacón es un eje prncpal de nerca y, sólo en ese caso, el vector L tene la dreccón de Ω, podemos entonces escrbr la relacón vectoral L I Ω (5.39) El momento de nerca I respecto de un eje prncpal se llama momento prncpal de nerca. Téngase muy en cuenta que la relacón (5.39) úncamente es válda para los ejes prncpales de nerca. 85
19 Fgura 5.0 Veamos un pequeño ejemplo para entender lo de los ejes prncpales. Sea el caso de la Fgura 5.0, donde el sstema cartesano (,, 3) defne los ejes prncpales. S Ω no es paralelo a uno de los ejes prncpales, como en el caso de la Fgura 5.0, lo podemos descomponer en tres vectores paralelos a los tres ejes prncpales, que denomnaremos Ω Ω, Ω 3,. Para cada una de estas rotacones valdrá una relacón vectoral del tpo (5.39), obtenéndose para el mpulso angular total, I e I 3 L + L + L3 I Ω + I Ω + I 3 Ω3 L (5.39 a) I son los tres momentos prncpales de nerca. Es evdente, como se puede aprecar el la Fgura 5.0, que el vector L no será más paralelo a Ω, a menos que I, I I. 3 Ejemplo IV: Como ejemplo calcularemos el momento de nerca para un caso partcular. Tomemos una esfera homogénea de densdad ρ y calculemos el momento de nerca respecto de un dámetro (caso partcular de la Fgura 5. h). S elegmos como elemento de volumen clndrtos como en la Fgura 5., cada uno de ellos contrbuye con un momento de nerca δ I δ mξ π ξ h dξ ρ ξ Por lo tanto, el momento de nerca total será Pero h R ξ ; entonces Donde la masa total m 4 π 3 3 R. R I h d πρ ξ ξ R I 4πρ ξ R ξ dξ πρ R mr 5 5 ρ 5 Fgura 5. 86

20 En muchos textos hay tablas de momentos de nerca respecto de ejes de smetría, para los cuerpos geométrcos más comunes. En las Fguras 5. a, b, c, d, e, f, g, h e, mostramos algunos ejemplos. Fgura 5. a y b Fgura 5. c y d 87

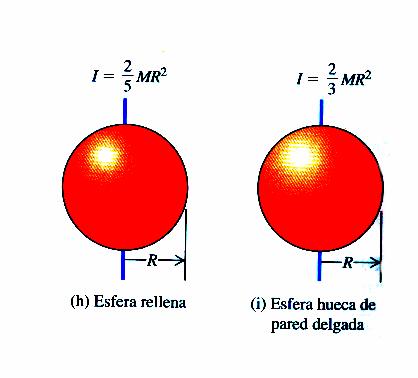
21 Fgura 5. e, f y g Fgura 5. h e 88
22 d P Regresemos a las ecuacones de movmento (5.6), ( R Fext ), y (5.7), d L ( M M ext ), del cuerpo rígdo. Las varables dnámcas mpulso lneal e mpulso angular que en ellas aparecen están unívocamente lgadas a las varables cnemátcas velocdad del centro e masa y velocdad angular respectvamente, medante la (5.8) y la (5.3). Por lo tanto, el estado del movmento determna P y L del cuerpo rígdo y vceversa, los dos mpulsos determnan unívocamente el estado de movmento a través de (5.8) y (5.3). 5.4 Estátca del cuerpo rígdo lbre y vnculado Estudaremos en esta seccón el equlbro de un cuerpo rígdo, o sea, las condcones para el sstema de fuerzas exterores sobre un cuerpo, orgnalmente en reposo, que conduzcan a que el msmo contnúe ndefndamente en reposo. De acuerdo con las ecuacones (5.8) ( P mv ) y (5.3) ( L ρr ( Ω r) dv ) la condcón necesara y sufcente para reposo permanente es: C P 0 y L 0 d P d L Esto mplca de acuerdo a la (5.6) ( R Fext ) y (5.7) ( M M ext ): R 0 (5.40) M 0 (5.4) Para que un cuerpo lbre permanezca en reposo, el sstema de fuerzas actuantes debe ser tal que su resultante y el momento resultante respecto de un punto sean ambos nulos. Obsérvese la mportanca del momento resultante: pueden darse casos en los que R 0 y no necesaramente haya equlbro. Son los casos de los pares de fuerzas que tenen resultante nula, pero el momento M 0. Una nocón muy mportante en la estátca y dnámca del cuerpo rígdo es la de sstema d P equvalente de fuerzas. En las ecuacones (5.6) ( R Fext ) y (5.7) d L ( M M ext ) y en las condcones de equlbro (5.40) y (5.4) sólo ntervenen la fuerza resultante y el momento total del sstema de fuerzas, y no cada fuerza en forma ndvdual. Habrá por lo tanto, nfntos sstemas de fuerzas de accón dnámca equvalentes: es decr, todos aquellos sstemas de fuerzas que tengan gual resultante e gual momento total. Veamos rápdamente dos ejemplos sencllos de sstemas de fuerzas equvalentes. Consderemos en prmer lugar el caso de una únca fuerza f que actúa sobre un cuerpo rígdo, aplcada en el punto P, como muestra la Fgura
23 Fgura 5.3 El sstema correspondente a este caso tene una resultante R f, y momento resultante respecto del centro de masa C: M r f. Cualquer otro sstema de fuerzas que tenga la msma resultante y el msmo momento total que los menconados, será equvalente. Es decr, producrá la msma accón dnámca sobre el cuerpo en cuestón. Supongamos ahora un sstema formado por una únca fuerza f ', f ' f, que está sobre la msma recta de accón que la f, pero aplcada en un punto P. Este nuevo sstema tendrá por resultante y momento total: R ' f ' f R M ' r' f ' ( r + PP') f r f + PP' f r f M PP' f 0 En otras palabras, dada una fuerza aplcada a un punto P podemos obtener un sstema equvalente, desplazando la fuerza sobre la recta de accón a otro punto cualquera. Por ello se suele decr que una fuerza puede desplazarse sobre su recta de accón sn que por ello se modfque su accón sobre el cuerpo rígdo. Fgura
24 El segundo ejemplo consste nuevamente en una únca fuerza f, aplcada en un punto P (Fgura 5.4). Introduzcamos ahora dos fuerzas guales y de sentdo contraro f ' y ' f, con f ' f, aplcadas al punto Q. Es evdente que estas dos fuerzas se anulan mutuamente y que no camban la resultante n el momento total. Pero s observamos la Fgura 5.4, puede consderarse un sstema equvalente de la sguente forma: una fuerza f gual a la orgnal, aplcada en el punto Q (o sea de recta de accón dstnta, pero paralela a la anteror), y un par de fuerzas (una cupla) QP f que es perpendcular al plano que pasa por f, f ', cuyo momento es PQ y que contene a f. En otras palabras: dada una fuerza aplcada a un punto P, podemos obtener un sstema equvalente, desplazando la recta de accón paralelamente a sí msma una dstanca d, con tal de añadr un momento de módulo f.d, perpendcular al plano determnado por esas dos rectas y de sentdo fjado por la regla del trabuzón. Fgura 5.5 Consderemos en partcular, un sstema de fuerzas de atraccón gravtatora que actúa sobre cada una de las masas δ m en los elementos de volumen δ V, de un cuerpo rígdo (Fgura 5.5). Por este motvo este tpo de fuerzas se de denomnan fuerzas de volumen. La resultante de estas fuerzas es: R grav δ m g m g (5.4) El momento de estas fuerzas de atraccón gravtatora respecto del centro de masa es: M r m g ( ρ r dv ) g δ 0 (5.43) donde hemos utlzado la (5.9) ( m r ρ r dv 0 ). En consecuenca, las fuerzas de C atraccón gravtaconal tenen un sstema equvalente que consste de una únca fuerza, g el peso m, aplcada al centro de masa. Por este motvo el centro de masa se denomna tambén centro de gravedad. Nótese que al hablar del peso de un cuerpo rígdo, uno se refere a la fuerza equvalente (pero nexstente físcamente) que reemplaza la accón de g nfntas pequeñas fuerzas δ m (que son las realmente exsten físcamente). Se ve entonces que el peso sólo afecta el movmento de traslacón de un cuerpo (5.4), no tenendo nfluenca sobre el movmento de rotacón. 9
25 El centro de masa gravedad con el centro de masa cuando la ntensdad del campo gravtatoro g es la msma para todo los puntos del cuerpo. Cuando esto no sucede (caso de la Luna en el campo gravtatoro terrestre), el centro de masa y el centro de gravedad son puntos dferentes. Estudaremos a contnuacón las condcones de equlbro de un cuerpo rígdo vnculado. Exsten dferentes formas de vncular un cuerpo rígdo: a) Apoyo puntual sobre un plano lso, sn frccón (Fgura 5.6) Fgura 5.6 El vínculo sólo puede ejercer una reaccón perpendcular, drgda haca arrba. Úncamente habrá equlbro s el sstema de fuerzas exterores tene por sstema equvalente una únca fuerza f que pasa por el punto de contacto O, es perpendcular al plano y tene sentdo haca el msmo. Esto quere decr que el momento total respecto de O debe ser cero y que la resultante debe ser perpendcular al plano, con sentdo haca abajo. Fgura 5.7 b) Punto fjo medante una artculacón (Fgura 5.7). La reaccón de vínculo pasa por O y puede tener cualquer dreccón y sentdo. Por lo tanto, sólo habrá equlbro s el sstema de fuerzas aplcado al cuerpo tene por sstema equvalente una únca fuerza f que pasa por O. Esto sgnfca que el momento total del sstema respecto de O debe ser cero (no hay otra condcón). 9
26 Fgura 5.8 c) Eje fjo, sn frccón (Fgura 5.8). Consderemos los puntos A y B de un eje y una fuerza f paralela al eje, aplcada en el punto P. S trasladamos la fuerza paralelamente hasta el eje (como en el ejemplo de la págna anteror), debemos ntroducr un momento de módulo f.d y dreccón perpendcular al plano de la Fgura 5.8. Ese momento tene f. d por par (cupla) equvalente a las fuerzas F y F' (donde F ) aplcadas en A y B. AB Tanto la fuerza f desplazada al eje como el par de vínculo R y en A y B. A R B F, F' serán anuladas por las reaccones Como únco ejemplo de estátca del cuerpo rígdo, dscutremos el clásco problema de la escalera de la Fgura 5.9. Fgura
27 Sea una escalera que consta de dos partes rígdas, de longtud l, apoyadas sn frccón en el suelo, formando cada una de ellas un ángulo α con la horzontal. Una cuerda une las dos partes a la altura l/. El peso de cada parte (mtades) de la escalera es p. En el punto O, una artculacón (sn frccón) une las dos partes. Se desea determnar las reaccones de vínculo y la tensón en la cuerda en funcón de la poscón en la que se encuentra sobre la escalera un ndvduo de peso P. Ubcando el sstema de coordenadas como se muestra en la Fgura 5.9 y suponendo al hombre parado en una poscón genérca cuya dstanca horzontal a la proyeccón del punto O vale x. Es necesaro como prmer paso del análss el anotar y dbujar en el gráfco todas las fuerzas aplcadas sobre cada uno de los cuerpos rígdos (las dos mtades de la escalera) vnculados entre sí. Sobre la mtad zquerda actuarán: la reaccón R A (vertcal y aplcada en A); reaccón R 0 (nteraccón con la otra mtad de la escalera aplcada en O); tensón de la cuerda T (otra nteraccón más con la mtad derecha de la escalera); peso propo de la mtad de la escalera p y el peso del ndvduo (o carga) P. Sobre la mtad derecha actuarán; R B (vertcal y aplcada en B); reaccón en O); tensón de la cuerda R x y R0 y R 0 (aplcada T y peso propo p. La reaccón en la artculacón O tendrá componentes 0, para la mtad zquerda de la escalera, y los msmos valores cambados de sgno para la mtad derecha de la escalera. El segundo paso en nuestro análss consste en consderar las ecuacones de equlbro (5.40) ( R 0 ) y (5.4) ( M 0). Pero prevamente a escrbrlas es necesaro el centro de momentos para la (5.40). Utlzaremos para ello la sguente receta: eljase como centro de momentos aquel punto que haga desaparecer el mayor número posble de fuerzas ncógntas en la ecuacón de momentos (5.40). En nuestro caso el punto O cumple con tal requsto (elmna todos los momentos de las fuerzas de reaccón (desconocdas) aplcadas en O). El tercer paso consste en el planteo de las ecuacones de equlbro y la verfcacón de la posbldad de resolverlas (es decr que el número de componentes de fuerzas ncógntas sea gual al número total de ecuacones algebracas). S hay más ncógntas que ecuacones el sstema está estátcamente ndetermnado (sólo relacones adconales, como las dadas por las fuerzas de rozamento o deformacones elástcas, permtrán la resolucón de sstemas ndetermnados). S, en cambo, aparecen más ecuacones que ncógntas, no puede haber equlbro. En nuestro caso las ecuacones (5.40) y (5.4) nos llevan al sguente sstema: Hoja zquerda de la escalera: Resultante sobre el eje de las x + T 0 R0 x p + R0 y Resultante sobre el eje de las y R P 0 Momento resultante según O l l R A l cos α + P x + p cosα + T senα 0 Hoja derecha de la escalera: Resultante sobre el eje de las x T 0 A R0 x p R0 y Resultante sobre el eje de las y R 0 B 94
28 l l Momento resultante según O T senα p cosα + RB l cosα 0 Obtenemos ses ecuacones con cnco ncógntas R, R, R, R y T. Sn embargo A B ox 0 y sólo cnco de las ecuacones son ndependentes (las ecuacones sobre el eje de las x son déntcas para los dos cuerpos). Por lo tanto habrá solucón únca (el numero de ncógntas concde con el de ecuacones). Resolvendo el sstema obtendremos P x RA + p l + cosα P x RB + p l cosα Debemos notar que, para x 0 (hombre parado en el tope de la escalera, es decr el punto O) se verfca que RA RB P / + p. El peso del hombre se reparte en partes guales sobre las reaccones. Para x l cosα (hombre parado en el punto A), RA P + p y RB p. Para la tensón obtenemos x T P p cot gα l cosα + Nuevamente para el caso x 0, la tensón es máxma y vale T ( P + p) cot gα. Para x l cosα, la tensón vale T p cotα y representa la tensón par el caso de la escalera sola, sn carga. Debemos notar que la tensón es proporconal a cot gα, lo que mplca que es mayor cuanto más aberta está la escalera (α más chco). Fnalmente para la reaccón en la artculacón (O) vale R0 x T, y P x R 0 y l cosα Esto muestra que esta reaccón de nnguna manera es horzontal como, quzás, podría haber parecdo en un prncpo. La componente vertcal es máxma para x 0 (hombre parado en el tope de la escalera, es decr el punto O) y vale P/. 5.5 Ejemplos de dnámca del cuerpo rígdo lbre La receta práctca para la resolucón de las ecuacones de movmento de un cuerpo d P d L rígdo (5.6) ( R Fext ) y (5.7)( M M ext ) es práctcamente smlar a la que postulamos para el caso estátco en el apartado anteror. En prmer lugar, es necesaro escrbr y dbujar todas las fuerzas aplcadas al cuerpo (conocdas e ncógntas). Luego, es necesaro elegr el centro de momentos para el momento de las fuerzas, el mpulso angular y la referenca del movmento. No sempre es convenente elegr el centro de masa; es más práctco elegr aquel punto que haga desaparecer el número máxmo de momentos de fuerzas ncógntas en la ecuacón (5.7). Una vez elegdo el centro de momentos adecuado, se procede a la ntegracón de las ecuacones para obtener los mpulsos lneal y angular en funcón del tempo y de las condcones ncales. Conocdos estos mpulsos, es posble determnar las velocdades de traslacón y angular del cuerpo, a partr de las (5.8) ( P mv ) y (5.3) ( L ρr ( Ω r) dv ), respectvamente (en realdad esta es la parte más engorrosa en la solucón del C 95
29 problema). Fnalmente, a partr del movmento de traslacón y rotacón, es posble determnar la poscón del cuerpo rígdo en funcón del tempo. Cómo prmer ejemplo de aplcacón de la receta práctca, dscutremos cualtatvamente el movmento de un cuerpo rígdo lanzado al are (desprecando el rozamento) (Fgura 5.30). La únca fuerza que actuará sobre el cuerpo es el peso, aplcado al centro de masa o centro de gravedad. Fgura 5.30 Las ecuacones de movmento referdas al centro de masa o de gravedad serán: d v R m g m d L M 0 El centro de gravedad se mueve entonces con aceleracón constante e gual a la gravedad: segurá por lo tanto la trayectora de una parábola de tro (como vmos en el Capítulo 3) determnada por las condcones ncales (velocdad y poscón del centro G de gravedad). La ecuacón para las rotacones ntegradas nos dce que L L 0 cte. El valor constante de L estará fjado por el vector velocdad de rotacón ncal, a través de (5.39 a). Como en general L y Ω no tenen la msma dreccón, y como lo que debe permanecer constante en este movmento es el vector mpulso angular L, el vector Ω no será constante urante el movmento. El resultado es un movmento de revolucón alrededor del centro de gravedad muy complcado que se denomna movmento de Posot. Sólo en el caso en que la rotacón ncal ocurra alrededor de un eje prncpal de nerca, la constanca de L mplcará la constanca de Ω. 96
Cinemática del Brazo articulado PUMA
 Cnemátca del Brazo artculado PUMA José Cortés Parejo. Enero 8. Estructura del brazo robótco El robot PUMA de la sere es un brazo artculado con artculacones rotatoras que le proporconan grados de lbertad
Cnemátca del Brazo artculado PUMA José Cortés Parejo. Enero 8. Estructura del brazo robótco El robot PUMA de la sere es un brazo artculado con artculacones rotatoras que le proporconan grados de lbertad
Tema 3. Sólido rígido.
 Tema 3. Sóldo rígdo. Davd Blanco Curso 009-010 ÍNDICE Índce 1. Sóldo rígdo. Cnemátca 3 1.1. Condcón cnemátca de rgdez............................ 3 1.. Movmento de traslacón...............................
Tema 3. Sóldo rígdo. Davd Blanco Curso 009-010 ÍNDICE Índce 1. Sóldo rígdo. Cnemátca 3 1.1. Condcón cnemátca de rgdez............................ 3 1.. Movmento de traslacón...............................
Resumen TEMA 1: Teoremas fundamentales de la dinámica y ecuaciones de Lagrange
 TEMA : Teoremas fundamentales de la dnámca y ecuacones de Lagrange Mecánca 2 Resumen TEMA : Teoremas fundamentales de la dnámca y ecuacones de Lagrange. Prncpos de dnámca clásca.. Leyes de ewton a) Ley
TEMA : Teoremas fundamentales de la dnámca y ecuacones de Lagrange Mecánca 2 Resumen TEMA : Teoremas fundamentales de la dnámca y ecuacones de Lagrange. Prncpos de dnámca clásca.. Leyes de ewton a) Ley
Vectores VECTORES 1.- Magnitudes Escalares y Magnitudes Vectoriales. Las Magnitudes Escalares: Las Magnitudes Vectoriales:
 VECTOES 1.- Magntudes Escalares y Magntudes Vectorales. Las Magntudes Escalares: son aquellas que quedan defndas úncamente por su valor numérco (escalar) y su undad correspondente, Eemplo de magntudes
VECTOES 1.- Magntudes Escalares y Magntudes Vectorales. Las Magntudes Escalares: son aquellas que quedan defndas úncamente por su valor numérco (escalar) y su undad correspondente, Eemplo de magntudes
TEMA 4. TRABAJO Y ENERGIA.
 TMA 4. TRABAJO Y NRGIA. l problema undamental de la Mecánca es descrbr como se moverán los cuerpos s se conocen las uerzas aplcadas sobre él. La orma de hacerlo es aplcando la segunda Ley de Newton, pero
TMA 4. TRABAJO Y NRGIA. l problema undamental de la Mecánca es descrbr como se moverán los cuerpos s se conocen las uerzas aplcadas sobre él. La orma de hacerlo es aplcando la segunda Ley de Newton, pero
IES Menéndez Tolosa (La Línea) Física y Química - 1º Bach - Gráficas
 Física y Química - 1º Bach - Gráficas") IES Menéndez Tolosa (La Línea) Físca y Químca - 1º Bach - Gráfcas 1 Indca qué tpo de relacón exste entre las magntudes representadas en la sguente gráfca: La gráfca es una línea recta que no pasa por el
IES Menéndez Tolosa (La Línea) Físca y Químca - 1º Bach - Gráfcas 1 Indca qué tpo de relacón exste entre las magntudes representadas en la sguente gráfca: La gráfca es una línea recta que no pasa por el
Campo eléctrico. Líneas de campo. Teorema de Gauss. El campo de las cargas en reposo. Campo electrostático
 qco sθ qz Ez= 4 zπε0 2+ R2 = 4πε0 [z2 +R2 ]3/ 2 El campo de las cargas en reposo. Campo electrostátco ntroduccón. Propedades dferencales del campo electrostátco. Propedades ntegrales del campo electromagnétco.
qco sθ qz Ez= 4 zπε0 2+ R2 = 4πε0 [z2 +R2 ]3/ 2 El campo de las cargas en reposo. Campo electrostátco ntroduccón. Propedades dferencales del campo electrostátco. Propedades ntegrales del campo electromagnétco.
Guía de Electrodinámica
 INSTITITO NACIONAL Dpto. de Físca 4 plan electvo Marcel López U. 05 Guía de Electrodnámca Objetvo: - econocer la fuerza eléctrca, campo eléctrco y potencal eléctrco generado por cargas puntuales. - Calculan
INSTITITO NACIONAL Dpto. de Físca 4 plan electvo Marcel López U. 05 Guía de Electrodnámca Objetvo: - econocer la fuerza eléctrca, campo eléctrco y potencal eléctrco generado por cargas puntuales. - Calculan
5ª Lección: Sistema de fuerzas gravitatorias. Cálculo de centros de gravedad de figuras planas: teoremas de Guldin.
 Capítulo II: MECÁNICA DEL SÓLIDO RÍGIDO 5ª Leccón: Sstema de fuerzas gravtatoras. Cálculo de centros de gravedad de fguras planas: teoremas de Guldn. Sstemas de fuerzas gravtatoras La deduccón parte de
Capítulo II: MECÁNICA DEL SÓLIDO RÍGIDO 5ª Leccón: Sstema de fuerzas gravtatoras. Cálculo de centros de gravedad de fguras planas: teoremas de Guldn. Sstemas de fuerzas gravtatoras La deduccón parte de
Consideremos un sólido rígido sometido a un sistema de fuerzas en equilibrío, es decir
 1. PRINIPIO E TRJOS VIRTULES El prncpo de los trabajos rtuales, en su ertente de desplazamentos rtuales, fue ntroducdo por John ernoull en 1717. La obtencón del msmo dera de la formulacón débl (o ntegral)
1. PRINIPIO E TRJOS VIRTULES El prncpo de los trabajos rtuales, en su ertente de desplazamentos rtuales, fue ntroducdo por John ernoull en 1717. La obtencón del msmo dera de la formulacón débl (o ntegral)
Centro de Masa. Sólido Rígido
 Centro de Masa Sóldo Rígdo El centro de masa de un sstema de partículas es un punto en el cual parecería estar concentrada toda la masa del sstema. En un sstema formado por partículas dscretas el centro
Centro de Masa Sóldo Rígdo El centro de masa de un sstema de partículas es un punto en el cual parecería estar concentrada toda la masa del sstema. En un sstema formado por partículas dscretas el centro
Mecánica del Sólido Rígido
 Mecánca del Sóldo Rígdo 1.- Introduccón Cnemátca, Dnámca y Estátca 2.- Cnemátca. Tpos de movmento del sóldo: Traslacón, Rotacón Movmento Plano General Movmento General 3.- Cnétca. Fuerzas y aceleracones.
Mecánca del Sóldo Rígdo 1.- Introduccón Cnemátca, Dnámca y Estátca 2.- Cnemátca. Tpos de movmento del sóldo: Traslacón, Rotacón Movmento Plano General Movmento General 3.- Cnétca. Fuerzas y aceleracones.
GUIAS DE ACTIVIDADES Y TRABAJO PRACTICO Nº 22
 DOCENTE: LIC.GUSTO DOLFO JUEZ GUI DE TJO PCTICO Nº 22 CES: POFESODO Y LICENCITU EN IOLOGI PGIN Nº 132 GUIS DE CTIIDDES Y TJO PCTICO Nº 22 OJETIOS: Lograr que el lumno: Interprete la nformacón de un vector.
DOCENTE: LIC.GUSTO DOLFO JUEZ GUI DE TJO PCTICO Nº 22 CES: POFESODO Y LICENCITU EN IOLOGI PGIN Nº 132 GUIS DE CTIIDDES Y TJO PCTICO Nº 22 OJETIOS: Lograr que el lumno: Interprete la nformacón de un vector.
Es el movimiento periódico de un punto material a un lado y a otro de su posición en equilibrio.
 1 Movmento Vbratoro Tema 8.- Ondas, Sondo y Luz Movmento Peródco Un móvl posee un movmento peródco cuando en ntervalos de tempo guales pasa por el msmo punto del espaco sempre con las msmas característcas
1 Movmento Vbratoro Tema 8.- Ondas, Sondo y Luz Movmento Peródco Un móvl posee un movmento peródco cuando en ntervalos de tempo guales pasa por el msmo punto del espaco sempre con las msmas característcas
CAPÍTULO IV: MODELOS MATEMÁTICOS Y MODELOS EN RED
 Modelo en red para la smulacón de procesos de agua en suelos agrícolas. CAPÍTULO IV: MODELOS MATEMÁTICOS Y MODELOS EN RED IV.1 Modelo matemátco 2-D Exsten dos posbldades, no ndependentes, de acuerdo con
Modelo en red para la smulacón de procesos de agua en suelos agrícolas. CAPÍTULO IV: MODELOS MATEMÁTICOS Y MODELOS EN RED IV.1 Modelo matemátco 2-D Exsten dos posbldades, no ndependentes, de acuerdo con
Tema 4: Variables aleatorias
 Estadístca 46 Tema 4: Varables aleatoras El concepto de varable aleatora surge de la necesdad de hacer más manejables matemátcamente los resultados de los expermentos aleatoros, que en muchos casos son
Estadístca 46 Tema 4: Varables aleatoras El concepto de varable aleatora surge de la necesdad de hacer más manejables matemátcamente los resultados de los expermentos aleatoros, que en muchos casos son
Mecánica del Sólido Rígido
 Mecánca del Sóldo ígdo 1.- Introduccón Cnemátca, Dnámca y Estátca 2.- Cnemátca. Tpos de movmento del sóldo: Traslacón, otacón Movmento Plano General Movmento General 3.- Cnétca. Fuerzas y aceleracones.
Mecánca del Sóldo ígdo 1.- Introduccón Cnemátca, Dnámca y Estátca 2.- Cnemátca. Tpos de movmento del sóldo: Traslacón, otacón Movmento Plano General Movmento General 3.- Cnétca. Fuerzas y aceleracones.
Capitalización y descuento simple
 Undad 2 Captalzacón y descuento smple 2.1. Captalzacón smple o nterés smple 2.1.1. Magntudes dervadas 2.2. Intereses antcpados 2.3. Cálculo de los ntereses smples. Métodos abrevados 2.3.1. Método de los
Undad 2 Captalzacón y descuento smple 2.1. Captalzacón smple o nterés smple 2.1.1. Magntudes dervadas 2.2. Intereses antcpados 2.3. Cálculo de los ntereses smples. Métodos abrevados 2.3.1. Método de los
1. GENERALIDADES DEL ÁLGEBRA GEOMÉTRICA. Definición del álgebra geométrica del espacio-tiempo
 EL ÁLGEBRA GEOMÉTRICA DEL ESPACIO Y TIEMPO. GENERALIDADES DEL ÁLGEBRA GEOMÉTRICA Defncón del álgebra geométrca del espaco-tempo Defno el álgebra geométrca del espaco y tempo como el álgebra de las matrces
EL ÁLGEBRA GEOMÉTRICA DEL ESPACIO Y TIEMPO. GENERALIDADES DEL ÁLGEBRA GEOMÉTRICA Defncón del álgebra geométrca del espaco-tempo Defno el álgebra geométrca del espaco y tempo como el álgebra de las matrces
Tipología de nudos y extremos de barra
 Tpología de nudos y extremos de barra Apelldos, nombre Basset Salom, Lusa (lbasset@mes.upv.es) Departamento Centro ecánca de edos Contnuos y Teoría de Estructuras Escuela Técnca Superor de Arqutectura
Tpología de nudos y extremos de barra Apelldos, nombre Basset Salom, Lusa (lbasset@mes.upv.es) Departamento Centro ecánca de edos Contnuos y Teoría de Estructuras Escuela Técnca Superor de Arqutectura
Fuerzas ficticias Referencial uniformemente acelerado
 Capítulo 10 Fuerzas fctcas Las fuerzas fctcas son fuerzas que deben nclurse en la descrpcón de un sstema físco cuando la observacón se realza desde un sstema de referenca no nercal, a pesar de ello, se
Capítulo 10 Fuerzas fctcas Las fuerzas fctcas son fuerzas que deben nclurse en la descrpcón de un sstema físco cuando la observacón se realza desde un sstema de referenca no nercal, a pesar de ello, se
ACTIVIDADES INICIALES
 Soluconaro 7 Números complejos ACTIVIDADES INICIALES 7.I. Clasfca los sguentes números, dcendo a cuál de los conjuntos numércos pertenece (entendendo como tal el menor conjunto). a) 0 b) 6 c) d) e) 0 f)
Soluconaro 7 Números complejos ACTIVIDADES INICIALES 7.I. Clasfca los sguentes números, dcendo a cuál de los conjuntos numércos pertenece (entendendo como tal el menor conjunto). a) 0 b) 6 c) d) e) 0 f)
Coordenadas Curvilíneas
 Departamento: Físca Aplcada III Mecánca Raconal (Ingenería Industral) Curso 007-08 Coordenadas Curvlíneas 1. Introduccón a. Obetvo: Generalar los tpos de coordenadas conocdos. Cartesanas. Clíndrcas, Esfércas,
Departamento: Físca Aplcada III Mecánca Raconal (Ingenería Industral) Curso 007-08 Coordenadas Curvlíneas 1. Introduccón a. Obetvo: Generalar los tpos de coordenadas conocdos. Cartesanas. Clíndrcas, Esfércas,
FUNDAMENTOS QUIMICOS DE LA INGENIERIA
 FUNDAMENTOS QUIMICOS DE LA INGENIERIA (BLOQUE DE INGENIERIA QUIMICA) GUION DE PRACTICAS DE LABORATORIO ANTONIO DURÁN SEGOVIA JOSÉ MARÍA MONTEAGUDO MARTÍNEZ INDICE PRACTICA PAGINA BALANCE MACROSCÓPICO DE
FUNDAMENTOS QUIMICOS DE LA INGENIERIA (BLOQUE DE INGENIERIA QUIMICA) GUION DE PRACTICAS DE LABORATORIO ANTONIO DURÁN SEGOVIA JOSÉ MARÍA MONTEAGUDO MARTÍNEZ INDICE PRACTICA PAGINA BALANCE MACROSCÓPICO DE
1. Lección 7 - Rentas - Valoración (Continuación)
") Apuntes: Matemátcas Fnanceras 1. Leccón 7 - Rentas - Valoracón (Contnuacón) 1.1. Valoracón de Rentas: Constantes y Dferdas 1.1.1. Renta Temporal y Pospagable En este caso, el orgen de la renta es un momento
Apuntes: Matemátcas Fnanceras 1. Leccón 7 - Rentas - Valoracón (Contnuacón) 1.1. Valoracón de Rentas: Constantes y Dferdas 1.1.1. Renta Temporal y Pospagable En este caso, el orgen de la renta es un momento
Electricidad y calor
 Electrcdad y calor Webpage: http://pagnas.sca.uson.mx/qb 2007 Departamento de Físca Unversdad de Sonora Temas 4. Prmera ley de la Termodnámca.. Concepto de Trabajo aplcado a gases.. Trabajo hecho por un
Electrcdad y calor Webpage: http://pagnas.sca.uson.mx/qb 2007 Departamento de Físca Unversdad de Sonora Temas 4. Prmera ley de la Termodnámca.. Concepto de Trabajo aplcado a gases.. Trabajo hecho por un
Problemas donde intervienen dos o más variables numéricas
 Análss de Regresón y Correlacón Lneal Problemas donde ntervenen dos o más varables numércas Estudaremos el tpo de relacones que exsten entre ellas, y de que forma se asocan Ejemplos: La presón de una masa
Análss de Regresón y Correlacón Lneal Problemas donde ntervenen dos o más varables numércas Estudaremos el tpo de relacones que exsten entre ellas, y de que forma se asocan Ejemplos: La presón de una masa
Electricidad y calor. Un repaso... Temas. 4. Primera ley de la Termodinámica. Webpage: Algunas definiciones
 Electrcdad y calor Webpage: http://pagnas.sca.uson.mx/qb 2007 Departamento de Físca Unversdad de Sonora Temas 4. Prmera ley de la Termodnámca.. Concepto de Trabajo aplcado a gases.. Trabajo hecho por un
Electrcdad y calor Webpage: http://pagnas.sca.uson.mx/qb 2007 Departamento de Físca Unversdad de Sonora Temas 4. Prmera ley de la Termodnámca.. Concepto de Trabajo aplcado a gases.. Trabajo hecho por un
Mecánica Clásica ( Partículas y Bipartículas )
") Mecánca lásca ( Partículas y Bpartículas ) Alejandro A. Torassa Lcenca reatve ommons Atrbucón 3.0 (0) Buenos Ares, Argentna atorassa@gmal.com Resumen Este trabajo consdera la exstenca de bpartículas y
Mecánca lásca ( Partículas y Bpartículas ) Alejandro A. Torassa Lcenca reatve ommons Atrbucón 3.0 (0) Buenos Ares, Argentna atorassa@gmal.com Resumen Este trabajo consdera la exstenca de bpartículas y
UNA FORMA GRÁFICA DE ENSEÑANZA: APLICACIÓN AL DUOPOLIO DE. Dpto. de Métodos Cuantitativos e Informáticos. Universidad Politécnica de Cartagena.
 UNA FORMA GRÁFICA DE ENSEÑANZA: APLICACIÓN AL DUOPOLIO DE COURNOT. Autores: García Córdoba, José Antono; josea.garca@upct.es Ruz Marín, Manuel; manuel.ruz@upct.es Sánchez García, Juan Francsco; jf.sanchez@upct.es
UNA FORMA GRÁFICA DE ENSEÑANZA: APLICACIÓN AL DUOPOLIO DE COURNOT. Autores: García Córdoba, José Antono; josea.garca@upct.es Ruz Marín, Manuel; manuel.ruz@upct.es Sánchez García, Juan Francsco; jf.sanchez@upct.es
Apuntes de Mecánica Newtoniana: Sistemas de Partículas, Cinemática y Dinámica del
 Apuntes de Mecánca Newtonana: Sstemas de Partículas, Cnemátca y Dnámca del Rígdo. Arel Fernández Danel Marta Insttuto de Físca - Facultad de Ingenería - Unversdad de la Repúblca Índce general Contendos
Apuntes de Mecánca Newtonana: Sstemas de Partículas, Cnemátca y Dnámca del Rígdo. Arel Fernández Danel Marta Insttuto de Físca - Facultad de Ingenería - Unversdad de la Repúblca Índce general Contendos
EL MÉTODO DE DIFERENCIAS FINITAS POR GUILLERMO HERNÁNDEZ GARCÍA
 EL MÉTODO DE DIFERENCIAS FINITAS POR GUILLERMO HERNÁNDEZ GARCÍA . El Método de Dferencas Fntas El Método consste en una aproxmacón de las dervadas parcales por expresones algebracas con los valores de
EL MÉTODO DE DIFERENCIAS FINITAS POR GUILLERMO HERNÁNDEZ GARCÍA . El Método de Dferencas Fntas El Método consste en una aproxmacón de las dervadas parcales por expresones algebracas con los valores de
Equilibrio y elasticidad
 Equlbro y elastcdad Condcones de equlbro Una partícula esta en equlbro s la resultante de todas las fuerzas (externas) que actúan sobre ella es cero Para cuerpos con extensón fnta: el centro de masa del
Equlbro y elastcdad Condcones de equlbro Una partícula esta en equlbro s la resultante de todas las fuerzas (externas) que actúan sobre ella es cero Para cuerpos con extensón fnta: el centro de masa del
NÚMEROS COMPLEJOS. y sabemos que no podemos calcular raíces de números negativos en R. Para resolver este problema introduciremos el valor i = 1
 NÚMEROS COMPLEJOS 1. Qué es un número complejo? Defncones. La ecuacón x + 1 = 0 no tene solucón en el campo real puesto que s ntentamos resolverla tendremos que x = ± 1 y sabemos que no podemos calcular
NÚMEROS COMPLEJOS 1. Qué es un número complejo? Defncones. La ecuacón x + 1 = 0 no tene solucón en el campo real puesto que s ntentamos resolverla tendremos que x = ± 1 y sabemos que no podemos calcular
MECÁNICA CLÁSICA MAESTRÍA EN CIENCIAS (FÍSICA) Curso de Primer Semestre - Otoño 2014. Omar De la Peña-Seaman. Instituto de Física (IFUAP)
 Curso de Primer Semestre - Otoño 2014. Omar De la Peña-Seaman. Instituto de Física (IFUAP)") MECÁNICA CLÁSICA MAESTRÍA EN CIENCIAS (FÍSICA) Curso de Prmer Semestre - Otoño 2014 Omar De la Peña-Seaman Insttuto de Físca (IFUAP) Benemérta Unversdad Autónoma de Puebla (BUAP) 1 / Omar De la Peña-Seaman
MECÁNICA CLÁSICA MAESTRÍA EN CIENCIAS (FÍSICA) Curso de Prmer Semestre - Otoño 2014 Omar De la Peña-Seaman Insttuto de Físca (IFUAP) Benemérta Unversdad Autónoma de Puebla (BUAP) 1 / Omar De la Peña-Seaman
Tema 3. Trabajo, energía y conservación de la energía
 Físca I. Curso 2010/11 Departamento de Físca Aplcada. ETSII de Béjar. Unversdad de Salamanca Profs. Alejandro Medna Domínguez y Jesús Ovejero Sánchez Tema 3. Trabajo, energía y conservacón de la energía
Físca I. Curso 2010/11 Departamento de Físca Aplcada. ETSII de Béjar. Unversdad de Salamanca Profs. Alejandro Medna Domínguez y Jesús Ovejero Sánchez Tema 3. Trabajo, energía y conservacón de la energía
DELTA MASTER FORMACIÓN UNIVERSITARIA C/ Gral. Ampudia, 16 Teléf.: 91 533 38 42-91 535 19 32 28003 MADRID
 DELTA MATE OMAÓN UNETAA / Gral. Ampuda, 6 8003 MADD EXÁMEN NTODUÓN A LA ELETÓNA UM JUNO 008 El examen consta de ses preguntas. Lea detendamente los enuncados. tene cualquer duda consulte al profesor. Todas
DELTA MATE OMAÓN UNETAA / Gral. Ampuda, 6 8003 MADD EXÁMEN NTODUÓN A LA ELETÓNA UM JUNO 008 El examen consta de ses preguntas. Lea detendamente los enuncados. tene cualquer duda consulte al profesor. Todas
Primer Parcial 2000: ( n ) 2. Introducción a la Optica (Agrimensura)
 2. Introducción a la Optica (Agrimensura)") Introduccón a la Optca (Agrmensura) Prmer Parcal 2000: Ejercco 1 (5 puntos): Se consdera la lámna transparente de la fgura, de índce de refraxón n'. El efecto de colocar la msma en la trayectora del rayo,
Introduccón a la Optca (Agrmensura) Prmer Parcal 2000: Ejercco 1 (5 puntos): Se consdera la lámna transparente de la fgura, de índce de refraxón n'. El efecto de colocar la msma en la trayectora del rayo,
Medidas de centralización
 1 Meddas de centralzacón Meda Datos no agrupados = x X = n = 0 Datos agrupados = x X = n = 0 Medana Ordenamos la varable de menor a mayor. Calculamos la columna de la frecuenca relatva acumulada F. Buscamos
1 Meddas de centralzacón Meda Datos no agrupados = x X = n = 0 Datos agrupados = x X = n = 0 Medana Ordenamos la varable de menor a mayor. Calculamos la columna de la frecuenca relatva acumulada F. Buscamos
Fugacidad. Mezcla de gases ideales
 Termodnámca del equlbro Fugacdad. Mezcla de gases deales rofesor: Alí Gabrel Lara 1. Fugacdad 1.1. Fugacdad para gases Antes de abarcar el caso de mezclas de gases, debemos conocer como podemos relaconar
Termodnámca del equlbro Fugacdad. Mezcla de gases deales rofesor: Alí Gabrel Lara 1. Fugacdad 1.1. Fugacdad para gases Antes de abarcar el caso de mezclas de gases, debemos conocer como podemos relaconar
Una Reformulación de la Mecánica Clásica
 Una Reformulacón de la Mecánca Clásca Antono A Blatter Lcenca Creatve Commons Atrbucón 30 (2015) Buenos Ares Argentna Este trabajo presenta una reformulacón de la mecánca clásca que es nvarante bajo transformacones
Una Reformulacón de la Mecánca Clásca Antono A Blatter Lcenca Creatve Commons Atrbucón 30 (2015) Buenos Ares Argentna Este trabajo presenta una reformulacón de la mecánca clásca que es nvarante bajo transformacones
Solución: Se denomina malla en un circuito eléctrico a todas las trayectorias cerradas que se pueden seguir dentro del mismo.
 1 A qué se denomna malla en un crcuto eléctrco? Solucón: Se denomna malla en un crcuto eléctrco a todas las trayectoras cerradas que se pueden segur dentro del msmo. En un nudo de un crcuto eléctrco concurren
1 A qué se denomna malla en un crcuto eléctrco? Solucón: Se denomna malla en un crcuto eléctrco a todas las trayectoras cerradas que se pueden segur dentro del msmo. En un nudo de un crcuto eléctrco concurren
Sistemas de Varias Partículas.
 Capítulo 6 Sstemas de Varas Partículas. Al estudar los sstemas con varas partículas surgen varos elementos adconales, como son los enlaces o lgaduras entre puntos, tanto nternos al sstema como externos,
Capítulo 6 Sstemas de Varas Partículas. Al estudar los sstemas con varas partículas surgen varos elementos adconales, como son los enlaces o lgaduras entre puntos, tanto nternos al sstema como externos,
i=1 Demuestre que cumple los axiomas de norma. Calcule el límite Verifiquemos cada uno de los axiomas de la definición de norma: i=1
 CAPÍTULO 3 EJERCICIOS RESUELTOS: CONCEPTOS BÁSICOS DE ÁLGEBRA LINEAL Ejerccos resueltos 1 1. La norma p (tambén llamada l p ) en R n se defne como ( ) 1/p x p = x p. Demuestre que cumple los axomas de
CAPÍTULO 3 EJERCICIOS RESUELTOS: CONCEPTOS BÁSICOS DE ÁLGEBRA LINEAL Ejerccos resueltos 1 1. La norma p (tambén llamada l p ) en R n se defne como ( ) 1/p x p = x p. Demuestre que cumple los axomas de
Aplicación de la termodinámica a las reacciones químicas Andrés Cedillo Departamento de Química Universidad Autónoma Metropolitana-Iztapalapa
 Aplcacón de la termodnámca a las reaccones químcas Andrés Cedllo Departamento de Químca Unversdad Autónoma Metropoltana-Iztapalapa Introduccón Las leyes de la termodnámca, así como todas las ecuacones
Aplcacón de la termodnámca a las reaccones químcas Andrés Cedllo Departamento de Químca Unversdad Autónoma Metropoltana-Iztapalapa Introduccón Las leyes de la termodnámca, así como todas las ecuacones
Variable aleatoria: definiciones básicas
 Varable aleatora: defncones báscas Varable Aleatora Hasta ahora hemos dscutdo eventos elementales y sus probabldades asocadas [eventos dscretos] Consdere ahora la dea de asgnarle un valor al resultado
Varable aleatora: defncones báscas Varable Aleatora Hasta ahora hemos dscutdo eventos elementales y sus probabldades asocadas [eventos dscretos] Consdere ahora la dea de asgnarle un valor al resultado
Relaciones entre variables
 Relacones entre varables Las técncas de regresón permten hacer predccones sobre los valores de certa varable Y (dependente), a partr de los de otra (ndependente), entre las que se ntuye que exste una relacón.
Relacones entre varables Las técncas de regresón permten hacer predccones sobre los valores de certa varable Y (dependente), a partr de los de otra (ndependente), entre las que se ntuye que exste una relacón.
OSCILACIONES 1.- INTRODUCCIÓN
 OSCILACIONES 1.- INTRODUCCIÓN Una parte relevante de la asgnatura trata del estudo de las perturbacones, entenddas como varacones de alguna magntud mportante de un sstema respecto de su valor de equlbro.
OSCILACIONES 1.- INTRODUCCIÓN Una parte relevante de la asgnatura trata del estudo de las perturbacones, entenddas como varacones de alguna magntud mportante de un sstema respecto de su valor de equlbro.
ANALISIS MATRICIAL DE ESTRUCTURAS MODELO MATEMATICO ANALISIS ESTRUCTURAL FUERZAS (ESFUERZOS)
") . GENERIDDES NISIS MTRICI DE ESTRCTRS Representar medante un modelo matemátco un sstema físco real. El propósto del análss es determnar la respuesta del modelo matemátco que está sometdo a un conunto de
. GENERIDDES NISIS MTRICI DE ESTRCTRS Representar medante un modelo matemátco un sstema físco real. El propósto del análss es determnar la respuesta del modelo matemátco que está sometdo a un conunto de
ESTADÍSTICA (GRUPO 12)
") ESTADÍSTICA (GRUPO 12) CAPÍTULO II.- ANÁLISIS DE UNA CARACTERÍSTICA (DISTRIBUCIONES UNIDIMENSIONALES) TEMA 7.- MEDIDAS DE CONCENTRACIÓN. DIPLOMATURA EN CIENCIAS EMPRESARIALES UNIVERSIDAD DE SEVILLA 1.
ESTADÍSTICA (GRUPO 12) CAPÍTULO II.- ANÁLISIS DE UNA CARACTERÍSTICA (DISTRIBUCIONES UNIDIMENSIONALES) TEMA 7.- MEDIDAS DE CONCENTRACIÓN. DIPLOMATURA EN CIENCIAS EMPRESARIALES UNIVERSIDAD DE SEVILLA 1.
Tema 1.3_A La media y la desviación estándar
 Curso 0-03 Grado en Físca Herramentas Computaconales Tema.3_A La meda y la desvacón estándar Dónde estudar el tema.3_a: Capítulo 4. J.R. Taylor, Error Analyss. Unv. cence Books, ausalto, Calforna 997.
Curso 0-03 Grado en Físca Herramentas Computaconales Tema.3_A La meda y la desvacón estándar Dónde estudar el tema.3_a: Capítulo 4. J.R. Taylor, Error Analyss. Unv. cence Books, ausalto, Calforna 997.
Números complejos. Actividades. Problemas propuestos. Matemáticas 1 Bachillerato? Solucionario del Libro
 Matemátcas Bachllerato? Soluconaro del Lbro Actvdades Dado el número complejo se pde: qué valor ha de tener x para que x? Calcula el opuesto de su conjugado Calcula el conjugado de su opuesto x x x El
Matemátcas Bachllerato? Soluconaro del Lbro Actvdades Dado el número complejo se pde: qué valor ha de tener x para que x? Calcula el opuesto de su conjugado Calcula el conjugado de su opuesto x x x El
En el capítulo correspondiente a Inducción Magnética, vimos que un cuadro de hilo
 VII. Corrente Alterna Introduccón: Cas la totaldad de la energía eléctrca utlzada actualmente se produce medante generadores eléctrcos de corrente alterna, la cual tene la gran ventaja sobre la corrente
VII. Corrente Alterna Introduccón: Cas la totaldad de la energía eléctrca utlzada actualmente se produce medante generadores eléctrcos de corrente alterna, la cual tene la gran ventaja sobre la corrente
Organización y resumen de datos cuantitativos
 Organzacón y resumen de datos cuanttatvos Contendos Organzacón de datos cuanttatvos: dagrama de tallos y hojas, tablas de frecuencas. Hstogramas. Polígonos. Ojvas ORGANIZACIÓN Y RESUMEN DE DATOS CUANTITATIVOS
Organzacón y resumen de datos cuanttatvos Contendos Organzacón de datos cuanttatvos: dagrama de tallos y hojas, tablas de frecuencas. Hstogramas. Polígonos. Ojvas ORGANIZACIÓN Y RESUMEN DE DATOS CUANTITATIVOS
Matemáticas Discretas
 Coordnacón de Cencas Computaconales - INAOE Matemátcas Dscretas Cursos Propedéutcos 2010 Cencas Computaconales INAOE Dr. Lus Vllaseñor Pneda vllasen@naoep.mx http://ccc.naoep.mx/~vllasen Algo de nformacón
Coordnacón de Cencas Computaconales - INAOE Matemátcas Dscretas Cursos Propedéutcos 2010 Cencas Computaconales INAOE Dr. Lus Vllaseñor Pneda vllasen@naoep.mx http://ccc.naoep.mx/~vllasen Algo de nformacón
PRUEBAS DE ACCESO A LA UNIVERSIDAD L.O.G.S.E
 PRUES DE CCESO L UNVERSDD L.O.G.S.E CURSO 004-005 CONVOCTOR SEPTEMRE ELECTROTECN EL LUMNO ELEGRÁ UNO DE LOS DOS MODELOS Crteros de calfcacón.- Expresón clara y precsa dentro del lenguaje técnco y gráfco
PRUES DE CCESO L UNVERSDD L.O.G.S.E CURSO 004-005 CONVOCTOR SEPTEMRE ELECTROTECN EL LUMNO ELEGRÁ UNO DE LOS DOS MODELOS Crteros de calfcacón.- Expresón clara y precsa dentro del lenguaje técnco y gráfco
CESMA BUSINESS SCHOOL
 CESMA BUSINESS SCHOOL MATEMÁTICAS FINANCIERAS. TEMA 4 RENTAS y MÉTODOS DE AMORTIZACIÓN Javer Blbao García 1 1.- Introduccón Defncón: Conjunto de captales con vencmentos equdstantes de tempo. Para que exsta
CESMA BUSINESS SCHOOL MATEMÁTICAS FINANCIERAS. TEMA 4 RENTAS y MÉTODOS DE AMORTIZACIÓN Javer Blbao García 1 1.- Introduccón Defncón: Conjunto de captales con vencmentos equdstantes de tempo. Para que exsta
8 MECANICA Y FLUIDOS: Calorimetría
 8 MECANICA Y FLUIDOS: Calormetría CONTENIDOS Dencones. Capacdad caloríca. Calor especíco. Equlbro térmco. Calormetría. Calorímetro de las mezclas. Marcha del calorímetro. Propagacón de Errores. OBJETIVOS
8 MECANICA Y FLUIDOS: Calormetría CONTENIDOS Dencones. Capacdad caloríca. Calor especíco. Equlbro térmco. Calormetría. Calorímetro de las mezclas. Marcha del calorímetro. Propagacón de Errores. OBJETIVOS
Reconciliación de datos experimentales. MI5022 Análisis y simulación de procesos mineralúgicos
 Reconclacón de datos expermentales MI5022 Análss y smulacón de procesos mneralúgcos Balances Balances en una celda de flotacón En torno a una celda de flotacón (o un crcuto) se pueden escrbr los sguentes
Reconclacón de datos expermentales MI5022 Análss y smulacón de procesos mneralúgcos Balances Balances en una celda de flotacón En torno a una celda de flotacón (o un crcuto) se pueden escrbr los sguentes
TEMA 6 AMPLIFICADORES OPERACIONALES
 Tema 6 Amplfcadores peraconales ev 4 TEMA 6 AMPLIFICADES PEACINALES Profesores: Germán llalba Madrd Mguel A. Zamora Izquerdo Tema 6 Amplfcadores peraconales ev 4 CNTENID Introduccón El amplfcador dferencal
Tema 6 Amplfcadores peraconales ev 4 TEMA 6 AMPLIFICADES PEACINALES Profesores: Germán llalba Madrd Mguel A. Zamora Izquerdo Tema 6 Amplfcadores peraconales ev 4 CNTENID Introduccón El amplfcador dferencal
ELECTROSTÁTICA. CAMPO ELÉCTRICO EN EL VACÍO.
 ELECTROSTÁTICA. CAMPO ELÉCTRICO EN EL VACÍO..- PERSPECTIVA HISTÓRICA MATERIA { MOLÉCULAS } { ÁTOMOS}, sendo los átomos y/o moléculas estables por la nteraccón electromagnétca. Desde la perspectva electromagnétca
ELECTROSTÁTICA. CAMPO ELÉCTRICO EN EL VACÍO..- PERSPECTIVA HISTÓRICA MATERIA { MOLÉCULAS } { ÁTOMOS}, sendo los átomos y/o moléculas estables por la nteraccón electromagnétca. Desde la perspectva electromagnétca
CÁLCULO DE INCERTIDUMBRE EN MEDIDAS FÍSICAS: MEDIDA DE UNA MASA
 CÁLCULO DE INCERTIDUMBRE EN MEDIDAS FÍSICAS: MEDIDA DE UNA MASA Alca Maroto, Rcard Boqué, Jord Ru, F. Xaver Rus Departamento de Químca Analítca y Químca Orgánca Unverstat Rovra Vrgl. Pl. Imperal Tàrraco,
CÁLCULO DE INCERTIDUMBRE EN MEDIDAS FÍSICAS: MEDIDA DE UNA MASA Alca Maroto, Rcard Boqué, Jord Ru, F. Xaver Rus Departamento de Químca Analítca y Químca Orgánca Unverstat Rovra Vrgl. Pl. Imperal Tàrraco,
En un mercado hay dos consumidores con las siguientes funciones de utilidad:
 En un mercado hay dos consumdores con las sguentes funcones de utldad: U ( + y, y = ln( + U ( = + y con a >,, y a ln( + donde, =,, es la cantdad del ben consumda por el ndvduo, y es la cantdad de renta
En un mercado hay dos consumdores con las sguentes funcones de utldad: U ( + y, y = ln( + U ( = + y con a >,, y a ln( + donde, =,, es la cantdad del ben consumda por el ndvduo, y es la cantdad de renta
6.1 EN QUÉ CONSISTEN LOS NÚMEROS COMPLEJOS
 TEMA NÚMEROS COMPLEJOS. EN QUÉ CONSISTEN LOS NÚMEROS COMPLEJOS DEFINICIONES Al resolver ecuacones del tpo : x + = 0 x = ± que no tene solucón en los números reales. Los números complejos nacen del deseo
TEMA NÚMEROS COMPLEJOS. EN QUÉ CONSISTEN LOS NÚMEROS COMPLEJOS DEFINICIONES Al resolver ecuacones del tpo : x + = 0 x = ± que no tene solucón en los números reales. Los números complejos nacen del deseo
v i CIRCUITOS ELÉCTRICOS (apuntes para el curso de Electrónica)
") IUITOS EÉTIOS (apuntes para el curso de Electrónca) os crcutos eléctrcos están compuestos por: fuentes de energía: generadores de tensón y generadores de corrente y elementos pasos: resstores, nductores
IUITOS EÉTIOS (apuntes para el curso de Electrónca) os crcutos eléctrcos están compuestos por: fuentes de energía: generadores de tensón y generadores de corrente y elementos pasos: resstores, nductores
Resumen de los teoremas fundamentales del análisis estructural aplicados a celosías
 Resumen de los teoremas fundamentales del análss estructural aplcados a celosías INTRODUCCIÓN Fuerzas aplcadas y deformacones de los nudos (=1,n) ESTICIDD Tensón =Ν/Α. Unforme en cada seccón de la arra.
Resumen de los teoremas fundamentales del análss estructural aplcados a celosías INTRODUCCIÓN Fuerzas aplcadas y deformacones de los nudos (=1,n) ESTICIDD Tensón =Ν/Α. Unforme en cada seccón de la arra.
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITECNICA ANTONIO JOSÉ DE SUCRE VICERRECTORADO BARQUISIMETO DEPARTAMENTO DE INGENIERÍA QUÍMICA. Ingeniería Química
 UNIVERSIDAD NACIONAL EXPERIMENTAL POLITECNICA ANTONIO JOSÉ DE SUCRE VICERRECTORADO BARQUISIMETO DEPARTAMENTO DE INGENIERÍA QUÍMICA Ingenería Químca Undad I. Introduccón a los cálculos de Ingenería Químca
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITECNICA ANTONIO JOSÉ DE SUCRE VICERRECTORADO BARQUISIMETO DEPARTAMENTO DE INGENIERÍA QUÍMICA Ingenería Químca Undad I. Introduccón a los cálculos de Ingenería Químca
Población: Es el conjunto de todos los elementos cuyo conocimiento nos interesa y serán objeto de nuestro estudio.
 Tema 9 - Estadístca - Matemátcas B 4º E.S.O. 1 TEMA 9 - ESTADÍSTICA 9.1 DOS RAMAS DE LA ESTADÍSTICA 9.1.1 - INTRODUCCIÓN La estadístca tene por objeto el desarrollo de técncas para el conocmento numérco
Tema 9 - Estadístca - Matemátcas B 4º E.S.O. 1 TEMA 9 - ESTADÍSTICA 9.1 DOS RAMAS DE LA ESTADÍSTICA 9.1.1 - INTRODUCCIÓN La estadístca tene por objeto el desarrollo de técncas para el conocmento numérco
TEMA 8: PRÉSTAMOS ÍNDICE
 TEM 8: PRÉSTMOS ÍNDICE 1. CONCEPTO DE PRÉSTMO: SISTEMS DE MORTIZCIÓN DE PRÉSTMOS... 1 2. NOMENCLTUR PR PRÉSTMOS DE MORTIZCIÓN FRCCIOND... 3 3. CUDRO DE MORTIZCIÓN GENERL... 3 4. MORTIZCIÓN DE PRÉSTMO MEDINTE
TEM 8: PRÉSTMOS ÍNDICE 1. CONCEPTO DE PRÉSTMO: SISTEMS DE MORTIZCIÓN DE PRÉSTMOS... 1 2. NOMENCLTUR PR PRÉSTMOS DE MORTIZCIÓN FRCCIOND... 3 3. CUDRO DE MORTIZCIÓN GENERL... 3 4. MORTIZCIÓN DE PRÉSTMO MEDINTE
De factores fijos. Mixto. Con interacción Sin interacción. No equilibrado. Jerarquizado
 Análss de la varanza con dos factores. Introduccón Hasta ahora se ha vsto el modelo de análss de la varanza con un factor que es una varable cualtatva cuyas categorías srven para clasfcar las meddas de
Análss de la varanza con dos factores. Introduccón Hasta ahora se ha vsto el modelo de análss de la varanza con un factor que es una varable cualtatva cuyas categorías srven para clasfcar las meddas de
Reconocimiento de Locutor basado en Procesamiento de Voz. ProDiVoz Reconocimiento de Locutor 1
 Reconocmento de Locutor basado en Procesamento de Voz ProDVoz Reconocmento de Locutor Introduccón Reconocmento de locutor: Proceso de extraccón automátca de nformacón relatva a la dentdad de la persona
Reconocmento de Locutor basado en Procesamento de Voz ProDVoz Reconocmento de Locutor Introduccón Reconocmento de locutor: Proceso de extraccón automátca de nformacón relatva a la dentdad de la persona
Perturbación de los valores propios simples de matrices de polinomios dependientes diferenciablemente de parámetros
 Perturbacón de los valores propos smples de matrces de polnomos dependentes dferencablemente de parámetros M Isabel García-Planas 1, Sona Tarragona 2 1 Dpt de Matemàtca Aplcada I, Unverstat Poltècnca de
Perturbacón de los valores propos smples de matrces de polnomos dependentes dferencablemente de parámetros M Isabel García-Planas 1, Sona Tarragona 2 1 Dpt de Matemàtca Aplcada I, Unverstat Poltècnca de
Propiedades Asintóticas
 Capítulo 3 Propedades Asntótcas 3.. Dstrbucones Estaconaras Defncón 3. Sea X n, n, una cadena de Markov con espaco de estados E y matrz de transcón P. Sea π(), E, una dstrbucón de probabldad, es decr,
Capítulo 3 Propedades Asntótcas 3.. Dstrbucones Estaconaras Defncón 3. Sea X n, n, una cadena de Markov con espaco de estados E y matrz de transcón P. Sea π(), E, una dstrbucón de probabldad, es decr,
3.1 Resolver mediante el método de la transformada de Laplace el problema 1.1.
 rcutos y Sstemas Dnámcos Ejerccos tema 3 Método de la transformada de aplace 3. esolver medante el método de la transformada de aplace el problema.. 3. esolver medante el método de la transformada de aplace
rcutos y Sstemas Dnámcos Ejerccos tema 3 Método de la transformada de aplace 3. esolver medante el método de la transformada de aplace el problema.. 3. esolver medante el método de la transformada de aplace
EJERCICIOS RESUELTOS DE TRABAJO Y ENERGÍA
 JRCICIOS RSULTOS D TRABAJO Y NRGÍA. Un bloque de 40 kg que se encuentra ncalmente en reposo, se empuja con una uerza de 30 N, desplazándolo en línea recta una dstanca de 5m a lo largo de una superce horzontal
JRCICIOS RSULTOS D TRABAJO Y NRGÍA. Un bloque de 40 kg que se encuentra ncalmente en reposo, se empuja con una uerza de 30 N, desplazándolo en línea recta una dstanca de 5m a lo largo de una superce horzontal
Ecuaciones y Teoremas de la Elasticidad.
 Capítulo 5 Ecuacones y Teoremas de la Elastcdad. partr de las ecuacones báscas de la Teoría de la Elastcdad, presentadas en los tres capítulos anterores, se dervan un conjunto de ecuacones y teoremas de
Capítulo 5 Ecuacones y Teoremas de la Elastcdad. partr de las ecuacones báscas de la Teoría de la Elastcdad, presentadas en los tres capítulos anterores, se dervan un conjunto de ecuacones y teoremas de
Métodos específicos de generación de diversas distribuciones discretas
 Tema 3 Métodos específcos de generacón de dversas dstrbucones dscretas 3.1. Dstrbucón de Bernoull Sea X B(p). La funcón de probabldad puntual de X es: P (X = 1) = p P (X = 0) = 1 p Utlzando el método de
Tema 3 Métodos específcos de generacón de dversas dstrbucones dscretas 3.1. Dstrbucón de Bernoull Sea X B(p). La funcón de probabldad puntual de X es: P (X = 1) = p P (X = 0) = 1 p Utlzando el método de
LECTURA 07: MEDIDAS DE TENDENCIA CENTRAL (PARTE II) LA MEDIANA Y LA MODA TEMA 17: LA MEDIANA Y LA MODA
 LA MEDIANA Y LA MODA TEMA 17: LA MEDIANA Y LA MODA") LECTURA 07: MEDIDAS DE TENDENCIA CENTRAL (PARTE II) LA MEDIANA Y LA MODA TEMA 17: LA MEDIANA Y LA MODA. LA MEDIANA: Es una medda de tendenca central que dvde al total de n observacones debdamente ordenadas
LECTURA 07: MEDIDAS DE TENDENCIA CENTRAL (PARTE II) LA MEDIANA Y LA MODA TEMA 17: LA MEDIANA Y LA MODA. LA MEDIANA: Es una medda de tendenca central que dvde al total de n observacones debdamente ordenadas
INSTITUTO DE FÍSICA FACULTAD DE INGENIERÍA
 INSTITUTO DE FÍSICA FACULTAD DE INGENIERÍA LABORATORIO 1-008 PRACTICA 4: LEYES DE LOS GASES 1. OBJETIVOS ) Comprobacón expermental de las leyes de los gases. En este caso nos vamos a concentrar en el estudo
INSTITUTO DE FÍSICA FACULTAD DE INGENIERÍA LABORATORIO 1-008 PRACTICA 4: LEYES DE LOS GASES 1. OBJETIVOS ) Comprobacón expermental de las leyes de los gases. En este caso nos vamos a concentrar en el estudo
Convertidores Digital-Analógico y Analógico-Digital
 Convertdores Dgtal-Analógco y Analógco-Dgtal Conversón Dgtal-Analógca y Analógca-Dgtal Con estos crcutos se trata de consegur una relacón bunívoca entre una señal analógca y una dgtal o vceversa. Las magntudes
Convertdores Dgtal-Analógco y Analógco-Dgtal Conversón Dgtal-Analógca y Analógca-Dgtal Con estos crcutos se trata de consegur una relacón bunívoca entre una señal analógca y una dgtal o vceversa. Las magntudes
CALCULO DE CENTROS DE MASA ! =
 CLCULO DE CENTOS DE S EXPESION GENEL: La poscón del centro de masas de un sstema de partículas vene dada por la expresón: r C.. m r m m r (1) donde es la masa total del sstema de partículas. Esta es una
CLCULO DE CENTOS DE S EXPESION GENEL: La poscón del centro de masas de un sstema de partículas vene dada por la expresón: r C.. m r m m r (1) donde es la masa total del sstema de partículas. Esta es una
Etáti Estática. 2.Centros de gravedad y 3.Momentos de inercia
 Etát Estátca.Equlbro 2.Centros de gravedad y 3.Momentos de nerca Parte de la físca que estuda el equlbro de los cuerpos Partedelafíscaqueestudalasrelaconesexstentes entre las fuerzas que actúan en un cuerpo
Etát Estátca.Equlbro 2.Centros de gravedad y 3.Momentos de nerca Parte de la físca que estuda el equlbro de los cuerpos Partedelafíscaqueestudalasrelaconesexstentes entre las fuerzas que actúan en un cuerpo
Leyes de tensión y de corriente
 hay6611x_ch03.qxd 1/4/07 5:07 PM Page 35 CAPÍTULO 3 Leyes de tensón y de corrente CONCEPTOS CLAVE INTRODUCCIÓN En el capítulo 2 se presentaron la resstenca así como varos tpos de fuentes. Después de defnr
hay6611x_ch03.qxd 1/4/07 5:07 PM Page 35 CAPÍTULO 3 Leyes de tensón y de corrente CONCEPTOS CLAVE INTRODUCCIÓN En el capítulo 2 se presentaron la resstenca así como varos tpos de fuentes. Después de defnr
DEPARTAMENTO DE INDUSTRIA Y NEGOCIO UNIVERSIDAD DE ATACAMA COPIAPO - CHILE
 DEPATAMENTO DE NDUSTA Y NEGOCO UNESDAD DE ATACAMA COPAPO - CHLE ESSTENCA EN SEE, PAALELO, MXTO Y SUPEPOSCÓN En los sguentes 8 crcutos calcule todas las correntes y ajes presentes, para ello consdere los
DEPATAMENTO DE NDUSTA Y NEGOCO UNESDAD DE ATACAMA COPAPO - CHLE ESSTENCA EN SEE, PAALELO, MXTO Y SUPEPOSCÓN En los sguentes 8 crcutos calcule todas las correntes y ajes presentes, para ello consdere los
CÁLCULO VECTORIAL 1.- MAGNITUDES ESCALARES Y VECTORIALES. 2.- VECTORES. pág. 1
 CÁLCL ECTRIAL 1. Magntudes escalares y vectorales.. ectores. Componentes vectorales. ectores untaros. Componentes escalares. Módulo de un vector. Cosenos drectores. 3. peracones con vectores. 3.1. Suma.
CÁLCL ECTRIAL 1. Magntudes escalares y vectorales.. ectores. Componentes vectorales. ectores untaros. Componentes escalares. Módulo de un vector. Cosenos drectores. 3. peracones con vectores. 3.1. Suma.
TERMODINÁMICA AVANZADA
 TERMODINÁMICA AVANZADA Undad III: Termodnámca del Equlbro Ecuacones para el coefcente de actvdad Funcones de eceso para mezclas multcomponentes 9/7/0 Rafael Gamero Funcones de eceso en mezclas bnaras Epansón
TERMODINÁMICA AVANZADA Undad III: Termodnámca del Equlbro Ecuacones para el coefcente de actvdad Funcones de eceso para mezclas multcomponentes 9/7/0 Rafael Gamero Funcones de eceso en mezclas bnaras Epansón
Histogramas: Es un diagrama de barras pero los datos son siempre cuantitativos agrupados en clases o intervalos.
 ESTADÍSTICA I. Recuerda: Poblacón: Es el conjunto de todos los elementos que cumplen una determnada propedad, que llamamos carácter estadístco. Los elementos de la poblacón se llaman ndvduos. Muestra:
ESTADÍSTICA I. Recuerda: Poblacón: Es el conjunto de todos los elementos que cumplen una determnada propedad, que llamamos carácter estadístco. Los elementos de la poblacón se llaman ndvduos. Muestra:
Comparación entre distintos Criterios de decisión (VAN, TIR y PRI) Por: Pablo Lledó
 Por: Pablo Lledó") Comparacón entre dstntos Crteros de decsón (, TIR y PRI) Por: Pablo Lledó Master of Scence en Evaluacón de Proyectos (Unversty of York) Project Management Professonal (PMP certfed by the PMI) Profesor
Comparacón entre dstntos Crteros de decsón (, TIR y PRI) Por: Pablo Lledó Master of Scence en Evaluacón de Proyectos (Unversty of York) Project Management Professonal (PMP certfed by the PMI) Profesor
Rentas o Anualidades
 Rentas o Anualdades Patrca Ksbye Profesorado en Matemátca Facultad de Matemátca, Astronomía y Físca 10 de setembre de 2013 Patrca Ksbye (FaMAF) 10 de setembre de 2013 1 / 31 Introduccón Rentas o Anualdades
Rentas o Anualdades Patrca Ksbye Profesorado en Matemátca Facultad de Matemátca, Astronomía y Físca 10 de setembre de 2013 Patrca Ksbye (FaMAF) 10 de setembre de 2013 1 / 31 Introduccón Rentas o Anualdades
Efectos fijos o aleatorios: test de especificación
 Cómo car?: Montero. R (2011): Efectos fjos o aleatoros: test de especfcacón. Documentos de Trabajo en Economía Aplcada. Unversdad de Granada. España Efectos fjos o aleatoros: test de especfcacón Roberto
Cómo car?: Montero. R (2011): Efectos fjos o aleatoros: test de especfcacón. Documentos de Trabajo en Economía Aplcada. Unversdad de Granada. España Efectos fjos o aleatoros: test de especfcacón Roberto
La variable compleja permite resolver problemas muy diferentes dentro de. áreas tan variadas como pueden ser hidráulica, aerodinámica, electricidad,
 17 Análss matemátco para Ingenería. M. MOLERO; A. SALVADOR; T. MENARGUEZ; L. GARMENDIA CAPÍTULO 1 Los números complejos La varable compleja permte resolver problemas muy dferentes dentro de áreas tan varadas
17 Análss matemátco para Ingenería. M. MOLERO; A. SALVADOR; T. MENARGUEZ; L. GARMENDIA CAPÍTULO 1 Los números complejos La varable compleja permte resolver problemas muy dferentes dentro de áreas tan varadas
Una renta fraccionada se caracteriza porque su frecuencia no coincide con la frecuencia de variación del término de dicha renta.
 Rentas Fnanceras. Renta fracconada 6. RETA FRACCIOADA Una renta fracconada se caracterza porque su frecuenca no concde con la frecuenca de varacón del térmno de dcha renta. Las característcas de la renta
Rentas Fnanceras. Renta fracconada 6. RETA FRACCIOADA Una renta fracconada se caracterza porque su frecuenca no concde con la frecuenca de varacón del térmno de dcha renta. Las característcas de la renta
Tema 1: Análisis de datos unidimensionales
 Tema : Análss de datos undmensonales. Varables estadístcas undmensonales. Representacones gráfcas.. Característcas de las dstrbucones de frecuencas undmensonales.. Varables estadístcas undmensonales. Representacones
Tema : Análss de datos undmensonales. Varables estadístcas undmensonales. Representacones gráfcas.. Característcas de las dstrbucones de frecuencas undmensonales.. Varables estadístcas undmensonales. Representacones
Cifrado de imágenes usando autómatas celulares con memoria
 Cfrado de mágenes usando autómatas celulares con memora L. Hernández Encnas 1, A. Hernández Encnas 2, S. Hoya Whte 2, A. Martín del Rey 3, G. Rodríguez Sánchez 4 1 Insttuto de Físca Aplcada, CSIC, C/Serrano
Cfrado de mágenes usando autómatas celulares con memora L. Hernández Encnas 1, A. Hernández Encnas 2, S. Hoya Whte 2, A. Martín del Rey 3, G. Rodríguez Sánchez 4 1 Insttuto de Físca Aplcada, CSIC, C/Serrano
Hidrología superficial
 Laboratoro de Hdráulca Ing. Davd Hernández Huéramo Manual de práctcas Hdrología superfcal 7o semestre Autores: Héctor Rvas Hernández Juan Pablo Molna Agular Rukmn Espnosa Díaz alatel Castllo Contreras
Laboratoro de Hdráulca Ing. Davd Hernández Huéramo Manual de práctcas Hdrología superfcal 7o semestre Autores: Héctor Rvas Hernández Juan Pablo Molna Agular Rukmn Espnosa Díaz alatel Castllo Contreras
TERMODINÁMICA AVANZADA
 ERMODINÁMICA AANZADA Undad III: ermodnámca del Equlbro Fugacdad Fugacdad para gases, líqudos y sóldos Datos volumétrcos 9/7/ Rafael Gamero Fugacdad ropedades con varables ndependentes y ln f ' Con la dfncón
ERMODINÁMICA AANZADA Undad III: ermodnámca del Equlbro Fugacdad Fugacdad para gases, líqudos y sóldos Datos volumétrcos 9/7/ Rafael Gamero Fugacdad ropedades con varables ndependentes y ln f ' Con la dfncón
Para abrirla tirando de un punto intermedio entre el eje y la manecilla habrá que realizar el mismo momentode fuerzas: Mg 50 F ʹ = 2F =
 ESTTIC La fuerza necesara para abrr una puerta trando de su maneclla es la centésma parte de su peso. S la puerta pesa 10 kg y la dstanca de la maneclla al eje de gro es 1 m, calcular la fuerza F ʹ necesara
ESTTIC La fuerza necesara para abrr una puerta trando de su maneclla es la centésma parte de su peso. S la puerta pesa 10 kg y la dstanca de la maneclla al eje de gro es 1 m, calcular la fuerza F ʹ necesara
TERMODINÁMICA DEL EQUILIBRIO CAPÍTULO V. EQUILIBRIO DE REACCIÓN QUÍMICA
 Ing. Federco G. Salazar Termodnámca del Equlbro TERMODINÁMICA DEL EQUILIBRIO CAPÍTULO V. EQUILIBRIO DE REACCIÓN QUÍMICA Contendo 1. Conversón y Coordenada de Reaccón. 2. Ecuacones Independentes y Regla
Ing. Federco G. Salazar Termodnámca del Equlbro TERMODINÁMICA DEL EQUILIBRIO CAPÍTULO V. EQUILIBRIO DE REACCIÓN QUÍMICA Contendo 1. Conversón y Coordenada de Reaccón. 2. Ecuacones Independentes y Regla
APLICACIÓN DEL ANALISIS INDUSTRIAL EN CARTERAS COLECTIVAS DE VALORES
 APLICACIÓN DEL ANALISIS INDUSTRIAL EN CARTERAS COLECTIVAS DE VALORES Documento Preparado para la Cámara de Fondos de Inversón Versón 203 Por Rodrgo Matarrta Venegas 23 de Setembre del 204 2 Análss Industral
APLICACIÓN DEL ANALISIS INDUSTRIAL EN CARTERAS COLECTIVAS DE VALORES Documento Preparado para la Cámara de Fondos de Inversón Versón 203 Por Rodrgo Matarrta Venegas 23 de Setembre del 204 2 Análss Industral
EQUILIBRIO DE UN CUERPO RIGIDO
 Manual e Laboratoro e ísca I C - UNMSM EQUILIBRIO E UN CUERPO RIGIO EXPERIENCIA Nº 6 Cuerpo rígdo: La dstanca entre dos puntos cualesquera del cuerpo permanece nvarante en el tempo. I. OBJETIVOS - Estudar
Manual e Laboratoro e ísca I C - UNMSM EQUILIBRIO E UN CUERPO RIGIO EXPERIENCIA Nº 6 Cuerpo rígdo: La dstanca entre dos puntos cualesquera del cuerpo permanece nvarante en el tempo. I. OBJETIVOS - Estudar