Control Analógico II M.I. Isidro Ignacio Lázaro Castillo
|
|
|
- Lidia Rey Alvarado
- hace 6 años
- Vistas:
Transcripción


1 UNIDAD I Método del lugar de las raíces Control Analógico II M.I. Isidro Ignacio Lázaro Castillo


2 Antecedentes históricos En 1948 Walter R. Evans introdujo este método que es gráfico y elegante para la solución de ecuaciones algebraicas. n n1 ( s ) a ns a n11s as 1 K 0
3 Definición El método del lugar geométrico de las raíces permite representargráficamentelaposicióndelospolosdeunsistema de lazo cerrado cuando se varía un parámetro, normalmente es la ganancia K. La dinámica de un sistema de control retroalimentado queda definida por medio de su función de transferencia R(s) + E(s) K G(s) Y(s) Ys ( ) KGs ( ) Rs ( ) 1 KGs ( ) - Gs ( ) Ps ( ) Qs ( )
4 Siendo su ecuación característica O bien 1 KG( s) 0 KG( s) 1 por lo que puede reescribirse en forma polar de la siguiente manera KG( s) KG( s) 10j
5 Condición de módulo KG( s) 1 Y condición ió de ángulo Donde KG ( s ) 180 k360 k 0, 1, 2, 3,...
6 Los valores de s que cumplen la condición de módulo y ángulo corresponden a los polos del sistema en lazo cerrado; Mientras que el diagrama de los puntos del plano complejo que únicamente satisfacen la condición de ángulo constituyen el lugar de las raíces del sistema.
7 EJEMPLO ILUSTRATIVO DEL CONCEPTO DE LUGAR DE LAS RAÍCES Ejemplo.- Determinar el diagrama del lugar de las raíces para el sistema de segundo orden mostrado en la figura. R(s) + - E(s) K 1 ss ( 2) C(s) Función có de transferencia e ca de lazo abe abierto GsHs ( ) ( ) K ss ( 2)
8 Función de transferencia de lazo cerrado Cs ( ) Gs ( ) K 2 Rs ( ) 1 GsHs ( ) ( ) s 2 s K Ecuación característica 2 s s K 2 0 Resolviendo la ecuación tenemos s s 2 44K K
9 De esta última ecuación se observa que la raíces serán reales si K 1y complejas sí K 1.
10 Lugar de las raíces de la ecuación j K=4 j 3 K=0 j K=0 K= j K=4 j 3
11 Además se puede observar que cualquier punto del lugar de las raíces satisface la condición de ángulo. 180 y j j 3 Q j j 3 2 P K ss ( 2) a) j 3 s s b) j tan tan tan 60 1
12 Por otro lado, de la ecuación puede deducirse que el factor de amortiguamiento de este sistema está determinado por n K Por lo cual el valor de K está íntimamente relacionado con el máximo sobreimpulso del sistema.
13 Reglas para construir el lugar de las raíces 1. - El lugar de las raíces es simétrico con respecto al eje real. Dado que los coeficientes del polinomio P(s) y Q(s) son reales entonces el polinomio puede tener raíces complejas solo enparesconjugados.
14 2. - Cada rama del lugar de las raíces inicia en cada polo de lazo abierto y termina en cada cero de lazo abierto o en infinito. El número de ramas que termina en infinito esta dado por Donde Num ramas= n - m n - número de polos en lazo abierto m número de ceros en lazo abierto
15 3. - Cualquier punto en el eje real es parte del lugar de las raíces sí y solo sí el número de polos y ceros a su derecha es impar. Esta propiedad debe satisfacer la condición de ángulo en cualquier punto del eje real del plano s. Para que un punto P pertenezca al lugar de la raíces es necesario que satisfaga la ecuación Donde k 0, 1, 2, 3,... KG( s) 180 k360
16 Demostración de la propiedad 3 j P 0
17 4.- Si el número de ceros finitos es menor que el número polos finitos ( m<n ), entonces n-m ramas del lugar de las raíces finalizan en ceros en el infinito, las asíntotas de estas ramas tiene como punto de intersección A, el cual se determina por: A Polos n-m ceros
18 Y tiene una inclinación A con respecto al eje real dado por Donde A 2 q n m q 0,1,2,..., n m Si el lugar de la raíces cruza el eje j para algún valor de K, este puede obtenerse por el criterio de Routh- Hurwitz.
19 6.- Los puntos de ruptura de entrada y salida del lugar de las raíces se determinan a partir de las raíces de la ecuación dk 0 ds ( ) j j dk ds s Q( ) d 0 0 Ps ( ) 0 ds a) b) a) Puntos de ruptura de salida b) puntos de ruptura de entrada.
20 7. - Los ángulos de partida del lugar de las raíces de un polo complejo están dados por d 180 suma de ángulos de vectores dibujados a este polo de otros polos + suma de ángulos de vectores dibujado a este polo de los ceros Los ángulos de llegada a un cero complejo se pueden obtener de manera similar il usando 180 suma de ángulos de vectores dibujados a este cero de otros ceros a + suma de ángulos de vectores dibujado a este cero de otros polos
21 Ejemplo.- Determinar el lugar de las raíces del sistema de control mostrado en la figura. R(s) + - E(s) K 1 ss ( 3)( s 4) i) Primero se toma la función de transferencia de trayecto directo s 0 K m 0 polos= s -3 ss ( 3)( s4) n 3 s -4
22 ii) A continuación se procede a la aplicación de ii) A continuación se procede a la aplicación de la propiedad 3 para determinar cual intervalo es lugar de las raíces
23 iii) Como n m 3 existen 3 ramas que van hacia el infinito y la intersección de sus asíntotas se pueden calcular por medio de a Y los ángulos de dichas asíntotas vienen dados por 2q 1 a 180 para q 0,1,2 3 Así para q=0 a 2(0)
24 Si q=1 1 a 2(1) Finalmente, si q=2 a 2(2)
25 iv) Los puntos de ruptura se pueden obtener de la propiedad 6, así llegamos a Por lo que Qs ( ) K s( s3)( s4) Ps ( ) dk ds 3 2 d s 7 s 12 s Por lo que derivando ds 0 2 3s 14s 12 0
26 Resolviendo la ecuación cuadrática s s Puede observarse que s 2 no es lugar de las raíces de acuerdo a la tabla 4.2, por lo que el punto de ruptura está ubicado en s 1.
27 v) Para determinar los cruces con el eje, aplicamos el criterio de Routh-Hurwitz al sistema retroalimentado FT.. LC K ss ( 3)( s4) K 1 ss ( 3)( s4) K ss ( 7 s 12) K s 7 s 12 s K Aplicando el criterio de Routh-Hurwitz a 3 2 s s 7s 12sK K
28 Del renglón de s 2 si K 84, 2 7s ( s 12) 0 s s 1 sj j j
29 Lugar de las raíces del sistema del ejemplo j j j 12
30 Ejercicio de Simulación Determinar el lugar de la raíces usando Matlab para un sistema con retroalimentación unitaria cuya función de transferencia de lazo abierto es Gs ( ) K 2 ss ( 4s 5) % Por lo tanto el sistema es inestable tiene dos polos en el semiplano derecho >> % Uso del comando rlocus(num,den) para generar el lugar de las raíces de G(s)H(s) >> % Definición del polinomio del numerador y denominador de G(s)H(s): F.T. delazo abierto >> num=[1]; >> den=[conv([0 1 0],[1 4 5])]; >> rlocus(num,den)
31 Lugar geométrico de la raíces obtenido por Matlab.
32 Diseño de parámetros usando el método del lugar de las raíces El método del lugar de las raíces es una herramienta útil en el diseño de sistemas de control, con este método se puede determinar el valor de la ganancia en lazo abierto para que los polos de lazo cerrado produzcan un factor de amortiguamiento, que originen un sobreimpulso deseado para el sistema.
33 En ocasiones es necesario manipular la ecuación característica del sistema dinámico, con objeto de extender la aplicación del método del lugar de las raíces a dos o más parámetros. Si la ecuación característica de un sistema dinámico dada por n ( s) a s a s asa 0 n n 1 n1 1 0
34 Así, el efecto del coeficiente a 1 puede estudiarse reacomodando la ecuación de la siguiente forma as 1 0 n as a s as a n 1 n1 2 n O bien puede presentarse el caso en el cual un parámetro, no aparezca solamente como coeficiente, i s ( a ) s as a s 1 0 s a s asa 2 1 0
35 Procedimiento para el diseño de parámetros usando el método de lugar de las raíces 1. Usando la función coseno, obtenemos n cos n j cos Plano s 1 n n 0 jn 1 2 j n 2 1
36 2. Se traza una línea en la gráfica del lugar de las raíces del sistema partiendo del origen con la inclinación resultante. 3. e identifica el punto P en el cual cruza el lugar de las raíces dicho segmento y se trazan radios vectores dirigidos desde los polos y ceros del sistema dirigidos a este punto.
37 4. Para determinar el valor de la ganancia K se utiliza la expresión: KG( s) 1 K 1 Q ( s ) Ps ( ) Ps ( ) Qs ( )
38 Ejemplo.- Para el sistema con retroalimentación unitaria cuya función de transferencia de lazo abierto se define como G(s). Determinar el valor de la ganancia en lazo abierto K para que los polos dominantes de la función de transferencia de un sistema de segundo orden presente un %M p =40%, verifique si el sistema puede considerarse dominante de segundo orden y en caso de que así sea calcule el t p y t s. K Gs ( ) 2 ( s 3)( s 4s5)
39 Al analizar la función de transferencia de lazo abierto, tenemos K m 0 2 ( s3)( s 4s5) n 3 s1 3 polos= s2 2 i s3 2 i
40 ii) Como hay un polo real aplicamos la regla 3, de tal manera que el lugar de las raíces sobre el eje real corresponde al intervalo [-3,- ]. iii) Debido a que hay más polos que ceros finitos aplicamos la regla 4. a 3 1 3
41 Como Como ,1,2 3 para a q q Con q=0, q=1 y si q=2 llegamos a 2(0) a 2(1) a 2(2) a 3 3
42 iv) Calculando los cruces con el eje aplicando el criterio de Routh-Hurwitz, FT LC K 2 Gs () s 3s 4s5 K 3 2 Gs ( ) 1 K 1 s 7s 17s15 K 2 s3 s 4s5 Para que se genere un renglón de ceros se debe cumplir que K=104,
43 2 7s s 17 0 Por lo tanto, t los cruces con el eje imaginario están en s j v) Debido a la existencia de polos complejos es aplicable la regla ( ) d 1 1 2
44 Cálculo del ángulo de partida d1 1 j j 0 j
45 De la figura tenemos Por lo tanto tan tan (90 45 ) 45 d Como d 2 corresponde al complejo conjugado de d1, tenemos 2 45
46
47 En este ejemplo de diseño se tiene como condición un máximo sobreimpulso de 40%, con este dato calculamos, así tenemos ln
48 Para factor de amortiguamiento, el ángulo correspondiente es: 1 cos (0.28) 73.73
49 Tomando las coordenadas del punto P, obtenemos los valores de a y b, así j Para determinar K evaluamos s K Qs ( ) Ps ( ) s j K 2 ( s3)( s 4s5) 1 s j
50 Realizando operaciones 2 K ( j3)( j 5) s j K K
51 Para verificar que el sistema es dominante de segundo orden sustituimos el valor de K en la función de transferencia de lazo cerrado. FT LC K s s s K K FT LC s s s
52 Obteniendo el polinomio característico ( s) s 7s 17s s 7s 17s s Polos s j s j
53 Por lo cual se puede considerar un sistema dominante de segundo orden. Reordenando la Función de transferencia en términos de un sistema dominante de segundo orden. Gs () s5.388s s8.314
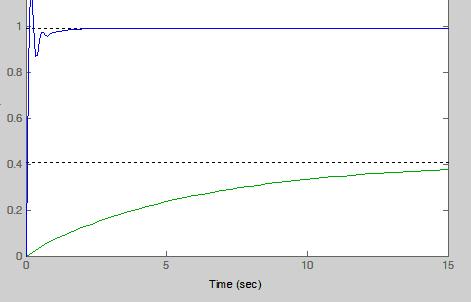
54 Si se aplican un escalón unitario al sistema con la ganancia diseñada se produce la respuesta mostrada en la figura, en donde se aprecia que el máximo sobreimpulso no rebasa el 40%.
55 Referencias 1.- Sinha N. K., Control Systems, John Wiley & Sons, 2 nd Edition, Nise S. N., Control Systems Engineering, g, John Wiley & Sons, 4 th Edition, Ogata K., Ingeniería de Control Moderno, Pearson Prentice Hall, 4 t ª Edición, Dorf B Sistemas de Control Moderno Pearson Prentice Hall 4.- Dorf B., Sistemas de Control Moderno, Pearson Prentice Hall, 10ª Edición, 2005.
56 5.- Hostetter G. H., Savant C. J., Stefani R. T., Sistemas de Control, McGraw-Hill, 1 ra Edición, Kuo C. B., Sistemas de Control Automático, Prentice Hall, Séptima edición, Hernández R., Introducción a los Sistemas de Control, Pearson, Primera edición, Lázaro I., Ingeniería de Sistemas de Control Continuo, 2da Edición, ió Ed. Universitaria. it i

57
58
59

60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95


96
97

98
99
100
101
102
103
104
105
106
107
108
109
110
111
112
113
114
115
116
117
118
119
120
121
122
123
124
125


126
127
128
129
130
131
132
133
134

135
136
137
138
139
140

141
142


143
144
145
146
147
148

149
150
151
152
153
154
155
156
157
158
159
160
161

162
163
164
165
166
167

168
169
170
171
172
173
174
175
176
177
178
179
180
181
182
183


184
185
186
187
188
189
190
191
6.1. Condición de magnitud y ángulo
 Capítulo 6 Lugar de las raíces La respuesta transitoria de un sistema en lazo cerrado, está ligada con la ubicación de los polos de lazo cerrado en el plano complejo S. Si el sistema tiene una ganancia
Capítulo 6 Lugar de las raíces La respuesta transitoria de un sistema en lazo cerrado, está ligada con la ubicación de los polos de lazo cerrado en el plano complejo S. Si el sistema tiene una ganancia
El método del lugar de las raíces.
 El método del lugar de las raíces. Las características de un sistema de lazo cerrado son determinadas por los polos de lazo cerrado. Los polos de lazo cerrado son las raíces de la ecuación característica.
El método del lugar de las raíces. Las características de un sistema de lazo cerrado son determinadas por los polos de lazo cerrado. Los polos de lazo cerrado son las raíces de la ecuación característica.
9. Análisis en frecuencia: lugar de las raíces
 Ingeniería de Control I Tema 9 Análisis en frecuencia: lugar de las raíces 1 9. Análisis en frecuencia: lugar de las raíces Introducción: Criterios de argumento y magnitud Reglas de construcción Ejemplo
Ingeniería de Control I Tema 9 Análisis en frecuencia: lugar de las raíces 1 9. Análisis en frecuencia: lugar de las raíces Introducción: Criterios de argumento y magnitud Reglas de construcción Ejemplo
Lugar Geométrico de las Raíces
 ELC-33103 Teoría de Control Lugar Geométrico de las Raíces Prof. Francisco M. Gonzalez-Longatt fglongatt@ieee.org http://www.giaelec.org/fglongatt/sp.htm 1. Introducción La característica básica de la
ELC-33103 Teoría de Control Lugar Geométrico de las Raíces Prof. Francisco M. Gonzalez-Longatt fglongatt@ieee.org http://www.giaelec.org/fglongatt/sp.htm 1. Introducción La característica básica de la
1 Lugar Geométrico de las Raíces (LGR)
") Lugar Geométrico de las Raíces (LGR) En capítulos anteriores se desmostró la estrecha relación que existe entre la respuesta transitoria de un sistema y la ubicación de las raíces de su ecuación característica
Lugar Geométrico de las Raíces (LGR) En capítulos anteriores se desmostró la estrecha relación que existe entre la respuesta transitoria de un sistema y la ubicación de las raíces de su ecuación característica
15. LUGAR DE LAS RAICES - CONSTRUCCION
 15. LUGAR DE LAS RAICES - CONSTRUCCION 15.1 INTRODUCCION El lugar de las raíces es una construcción gráfica, en el plano imaginario, de las raíces de la ecuación característica de un lazo de control para
15. LUGAR DE LAS RAICES - CONSTRUCCION 15.1 INTRODUCCION El lugar de las raíces es una construcción gráfica, en el plano imaginario, de las raíces de la ecuación característica de un lazo de control para
Ejercicios Resueltos
 Ejercicios Resueltos Ejercicio 1 La función de transferencia de un sistema de control tiene como expresión: Determinar, aplicando el método de Routh, si el sistema es estable. Para comprobar la estabilidad
Ejercicios Resueltos Ejercicio 1 La función de transferencia de un sistema de control tiene como expresión: Determinar, aplicando el método de Routh, si el sistema es estable. Para comprobar la estabilidad
Nombre: Carné Ordinal. Parte I preguntas (1 punto c/u) Escriba la respuesta en el espacio indicado o encierre en un círculo la respuesta correcta:
 Escriba la respuesta en el espacio indicado o encierre en un círculo la respuesta correcta:") INSTITUTO TECNOLÓGICO DE COSTA RICA II SEMESTRE 2013 ESCUELA DE INGENIERIA EN ELECTRÓNICA CURSO: EL-5408 CONTROL AUTOMÁTICO MEDIO: Examen 3 PROF: ING. EDUARDO INTERIANO Nombre: Carné Ordinal Parte I preguntas
INSTITUTO TECNOLÓGICO DE COSTA RICA II SEMESTRE 2013 ESCUELA DE INGENIERIA EN ELECTRÓNICA CURSO: EL-5408 CONTROL AUTOMÁTICO MEDIO: Examen 3 PROF: ING. EDUARDO INTERIANO Nombre: Carné Ordinal Parte I preguntas
Tema 5. Análisis de sistemas muestreados
 Ingeniería de Control Tema 5. Análisis de sistemas muestreados Daniel Rodríguez Ramírez Teodoro Alamo Cantarero Contextualización del tema Conocimientos que se adquieren en este tema: Relacionar la estabilidad
Ingeniería de Control Tema 5. Análisis de sistemas muestreados Daniel Rodríguez Ramírez Teodoro Alamo Cantarero Contextualización del tema Conocimientos que se adquieren en este tema: Relacionar la estabilidad
DIAGRAMAS DE BLOQUES. Figura 1 Elementos de un diagrama de bloques
 DIAGRAMAS DE BOQUES 1. EEMENTOS DE UN DIAGRAMA DE BOQUES Un diagrama de bloques de un sistema es una representación gráfica de las funciones realizadas por cada componente y del flujo de las señales. os
DIAGRAMAS DE BOQUES 1. EEMENTOS DE UN DIAGRAMA DE BOQUES Un diagrama de bloques de un sistema es una representación gráfica de las funciones realizadas por cada componente y del flujo de las señales. os
ANÁLISIS DEL LUGAR GEOMÉTRICO DE LAS RAÍCES
 CAPITULO 3 ANÁLISIS DEL LUGAR GEOMÉTRICO DE LAS RAÍCES 3. INTRODUCCIÓN La etabilidad relativa y la repueta tranitoria de un itema de control en lazo cerrado etán directamente relacionada con la localización
CAPITULO 3 ANÁLISIS DEL LUGAR GEOMÉTRICO DE LAS RAÍCES 3. INTRODUCCIÓN La etabilidad relativa y la repueta tranitoria de un itema de control en lazo cerrado etán directamente relacionada con la localización
6. Diagramas de flujo.
 Ingeniería de Control I Tema 6 Diagramas de flujo 1 6. Diagramas de flujo. Representación en DF Simplificaciones Fórmula de Mason Formas de Kalman Sistemas MIMO Diagramas de Flujo 2 1 Bibliografía Señales
Ingeniería de Control I Tema 6 Diagramas de flujo 1 6. Diagramas de flujo. Representación en DF Simplificaciones Fórmula de Mason Formas de Kalman Sistemas MIMO Diagramas de Flujo 2 1 Bibliografía Señales
GEOMETRÍA. que pasa por el punto P y es paralelo a π. (0,9 puntos) b) Determinar la ecuación del plano π
 b) Determinar la ecuación del plano π") GEOMETRÍA 1.- Se considera la recta r : ( x, y, z) = ( t + 1, t,3 t), el plano π: x y z = 0y el punto P (1,1,1). Se pide: a) Determinar la ecuación del plano π 1 que pasa por el punto P y es paralelo a
GEOMETRÍA 1.- Se considera la recta r : ( x, y, z) = ( t + 1, t,3 t), el plano π: x y z = 0y el punto P (1,1,1). Se pide: a) Determinar la ecuación del plano π 1 que pasa por el punto P y es paralelo a
Respuesta transitoria
 Capítulo 4 Respuesta transitoria Una ves que los diagramas a bloques son desarrollados, el siguiente paso es llevar a cabo el análisis de los sistemas. Existen dos tipos de análisis: cuantitativo y cualitativo.
Capítulo 4 Respuesta transitoria Una ves que los diagramas a bloques son desarrollados, el siguiente paso es llevar a cabo el análisis de los sistemas. Existen dos tipos de análisis: cuantitativo y cualitativo.
Transformada de Laplace - Conceptos Básicos. e -st f(t)dt. L { f (t) } = F(s) =
dt. L { f (t) } = F(s) =") Transformada de Laplace - Conceptos Básicos Definición: Sea f (t) una función de t definida para t > 0. La Transformada de Laplace de f(t) se define como: L { f (t) } = F(s) = 0 e -st f(t)dt Algunas Propiedades
Transformada de Laplace - Conceptos Básicos Definición: Sea f (t) una función de t definida para t > 0. La Transformada de Laplace de f(t) se define como: L { f (t) } = F(s) = 0 e -st f(t)dt Algunas Propiedades
Cálculo I (Grado en Ingeniería Informática) Problemas adicionales resueltos
 Problemas adicionales resueltos") Cálculo I (Grado en Ingeniería Informática) - Problemas adicionales resueltos Calcula el ĺımite lím ( n + n + n + ) n Racionalizando el numerador, obtenemos L lím ( n + n + n (n + n + ) (n + ) + ) lím
Cálculo I (Grado en Ingeniería Informática) - Problemas adicionales resueltos Calcula el ĺımite lím ( n + n + n + ) n Racionalizando el numerador, obtenemos L lím ( n + n + n (n + n + ) (n + ) + ) lím
Parciales Matemática CBC Parciales Resueltos - Exapuni.
 Parciales Matemática CBC 2012 Parciales Resueltos - Exapuni www.exapuni.com.ar Compilado de primeros parciales del 2012 Parcial 1 1) Sea. Hallar todos los puntos de la forma, tales que la distancia entre
Parciales Matemática CBC 2012 Parciales Resueltos - Exapuni www.exapuni.com.ar Compilado de primeros parciales del 2012 Parcial 1 1) Sea. Hallar todos los puntos de la forma, tales que la distancia entre
UNIDAD 4: FUNCIONES POLINOMIALES Y RACIONALES
 UNIDAD 4: FUNCIONES POLINOMIALES Y RACIONALES En la Sección anterior se abordó contenidos relacionados con las funciones y gráficas, continuamos aprendiendo más sobre funciones; en la presente unidad abordaremos
UNIDAD 4: FUNCIONES POLINOMIALES Y RACIONALES En la Sección anterior se abordó contenidos relacionados con las funciones y gráficas, continuamos aprendiendo más sobre funciones; en la presente unidad abordaremos
Tema 2.5: Análisis basado en el método del Lugar de las Raíces
 Tema 2.5: Análisis basado en el método del Lugar de las Raíces 1. Lugar de las Raíces 2. Trazado de la gráfica 3. Lugar de las raíces generalizado 4. Diseño de controladores 1. El lugar de las raíces Objetivo:
Tema 2.5: Análisis basado en el método del Lugar de las Raíces 1. Lugar de las Raíces 2. Trazado de la gráfica 3. Lugar de las raíces generalizado 4. Diseño de controladores 1. El lugar de las raíces Objetivo:
18. DOMINIO FRECUENCIA CRITERIO DE NYQUIST
 18. DOMINIO FRECUENCIA CRITERIO DE NYQUIST 18.1. DIAGRAMAS POLARES En análisis dinámico de sistemas en el dominio de la frecuencia, además de emplearse los diagramas y el criterio de Bode, se utilizan
18. DOMINIO FRECUENCIA CRITERIO DE NYQUIST 18.1. DIAGRAMAS POLARES En análisis dinámico de sistemas en el dominio de la frecuencia, además de emplearse los diagramas y el criterio de Bode, se utilizan
V. DISCUSIÓN DE ECUACIONES ALGEBRAICAS
 V. DISCUSIÓN DE ECUACIONES ALGEBRAICAS 134 5.1. DISCUSIÓN DE UNA ECUACIÓN Discutir una ecuación algebraica representada por una epresión en dos variables de la forma f (, y) = 0, significa analizar algunos
V. DISCUSIÓN DE ECUACIONES ALGEBRAICAS 134 5.1. DISCUSIÓN DE UNA ECUACIÓN Discutir una ecuación algebraica representada por una epresión en dos variables de la forma f (, y) = 0, significa analizar algunos
a) f(x) (x 1) 2 b) f(x) x c) h(x) 1 2 a) f (3) 8 0 f es creciente en x 3.
 f(x) (x 1) 2 b) f(x) x c) h(x) 1 2 a) f (3) 8 0 f es creciente en x 3.") 6 Aplicando la definición de derivada, calcula la derivada de las siguientes funciones en los puntos que se indican: a) f() en Aplicando la definición de derivada, calcula f () en las funciones que se
6 Aplicando la definición de derivada, calcula la derivada de las siguientes funciones en los puntos que se indican: a) f() en Aplicando la definición de derivada, calcula f () en las funciones que se
Apuntes Matemáticas 2º de bachillerato. Tema 5. Estudio de funciones
 Apuntes Tema 5 Estudio de funciones 5.1 Dominio Hay que determinar para qué intervalos de números reales, o puntos aislados, la función existe o está definida. Para ello tenemos que prestar atención a
Apuntes Tema 5 Estudio de funciones 5.1 Dominio Hay que determinar para qué intervalos de números reales, o puntos aislados, la función existe o está definida. Para ello tenemos que prestar atención a
PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 2001 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO
 PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 001 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO Junio, Ejercicio 3, Opción B Junio, Ejercicio 4, Opción A Reserva 1, Ejercicio 4, Opción B Reserva, Ejercicio
PROBLEMAS RESUELTOS SELECTIVIDAD ANDALUCÍA 001 MATEMÁTICAS II TEMA 3: ESPACIO AFIN Y EUCLIDEO Junio, Ejercicio 3, Opción B Junio, Ejercicio 4, Opción A Reserva 1, Ejercicio 4, Opción B Reserva, Ejercicio
TEMA 0: REPASO DE FUNCIONES
 TEMA 0: REPASO DE FUNCIONES Recordamos que una función real de variable real es una aplicación de un subconjunto de los números reales A en el conjunto de los números reales de forma que a cada elemento
TEMA 0: REPASO DE FUNCIONES Recordamos que una función real de variable real es una aplicación de un subconjunto de los números reales A en el conjunto de los números reales de forma que a cada elemento
INTERVALOS Y SEMIRRECTAS.
 el blog de mate de aida CSI: Inecuaciones pág 1 INTERVALOS Y SEMIRRECTAS La ordenación de números permite definir algunos conjuntos de números que tienen una representación geométrica en la recta real
el blog de mate de aida CSI: Inecuaciones pág 1 INTERVALOS Y SEMIRRECTAS La ordenación de números permite definir algunos conjuntos de números que tienen una representación geométrica en la recta real
Si se pueden obtener las imágenes de x por simple sustitución.
 TEMA 0: REPASO DE FUNCIONES FUNCIONES: TIPOS DE FUNCIONES Funciones algebraicas En las funciones algebraicas las operaciones que hay que efectuar con la variable independiente son: la adición, sustracción,
TEMA 0: REPASO DE FUNCIONES FUNCIONES: TIPOS DE FUNCIONES Funciones algebraicas En las funciones algebraicas las operaciones que hay que efectuar con la variable independiente son: la adición, sustracción,
TEMA 5. CURVAS CÓNICAS.
 5.1. GENERALIDADES. TEMA 5. CURVAS CÓNICAS. Se denominan secciones cónicas a aquellas superficies que son producidas por la intersección de un plano con una superficie cónica de revolución (una superficie
5.1. GENERALIDADES. TEMA 5. CURVAS CÓNICAS. Se denominan secciones cónicas a aquellas superficies que son producidas por la intersección de un plano con una superficie cónica de revolución (una superficie
ESTUDIO GRÁFICO DE LA ELIPSE.
 Curvas Cónicas para Dibujo y Matemáticas. Aplicación web Dibujo Técnico para ESO y Bachillerato Matemáticas para Bachillerato Educación Plástica y Visual Autor: José Antonio Cuadrado Vicente. ESTUDIO GRÁFICO
Curvas Cónicas para Dibujo y Matemáticas. Aplicación web Dibujo Técnico para ESO y Bachillerato Matemáticas para Bachillerato Educación Plástica y Visual Autor: José Antonio Cuadrado Vicente. ESTUDIO GRÁFICO
Conferencia clase. Al desacoplar las ecuaciones se tiene. Sistemas de ecuaciones diferenciales lineales usando álgebra lineal
 Conferencia clase Al desacoplar las ecuaciones se tiene stemas de ecuaciones diferenciales lineales usando álgebra lineal Contenido. 1. stemas de ecuaciones diferenciales de primer orden. 2. Forma matricial
Conferencia clase Al desacoplar las ecuaciones se tiene stemas de ecuaciones diferenciales lineales usando álgebra lineal Contenido. 1. stemas de ecuaciones diferenciales de primer orden. 2. Forma matricial
Derivadas Parciales (parte 2)
") 40 Derivadas Parciales (parte 2) Ejercicio: Si donde y. Determinar Solución: Consideraremos ahora la situación en la que, pero cada una de las variables e es función de dos variables y. En este caso tiene
40 Derivadas Parciales (parte 2) Ejercicio: Si donde y. Determinar Solución: Consideraremos ahora la situación en la que, pero cada una de las variables e es función de dos variables y. En este caso tiene
LA CIRCUNFERENCIA. La circunferencia es la sección producida por un plano perpendicular al eje.
 LA CIRCUNFERENCIA La circunferencia es la sección producida por un plano perpendicular al eje. β = 90º La circunferencia es un caso particular de elipse. Se llama circunferencia al lugar geométrico de
LA CIRCUNFERENCIA La circunferencia es la sección producida por un plano perpendicular al eje. β = 90º La circunferencia es un caso particular de elipse. Se llama circunferencia al lugar geométrico de
Mapa Curricular: Funciones y Modelos
 A.PR.11.2.1 Determina el dominio y el alcance de las funciones a partir de sus diferentes representaciones. A.PR.11.2.2 Identifica y aplica las relaciones entre los puntos importantes de una función (ceros,
A.PR.11.2.1 Determina el dominio y el alcance de las funciones a partir de sus diferentes representaciones. A.PR.11.2.2 Identifica y aplica las relaciones entre los puntos importantes de una función (ceros,
Se desea estudiar el comportamiento de una función a medida independiente x se aproxima a un valor específico.
 Tema: Límites de las funciones Objetivos: Comprender el concepto de límite de una función y las propiedades de los límites. Calcular el límite de una función algebraica utilizando las propiedades de los
Tema: Límites de las funciones Objetivos: Comprender el concepto de límite de una función y las propiedades de los límites. Calcular el límite de una función algebraica utilizando las propiedades de los
MATEMÁTICAS 1º BACHILLERATO Curso EJERCICIOS RESUELTOS DE INECUACIONES
 MATEMÁTICAS 1º BACHILLERATO Curso 9-1 EJERCICIOS RESUELTOS DE INECUACIONES EJERCICIOS RESUELTOS DE INECUACIONES A. Inecuaciones lineales con una incógnita x x1 x3 > 1 3 4 x x1 x3 4( x ) 3( x1) 6( x3) 1
MATEMÁTICAS 1º BACHILLERATO Curso 9-1 EJERCICIOS RESUELTOS DE INECUACIONES EJERCICIOS RESUELTOS DE INECUACIONES A. Inecuaciones lineales con una incógnita x x1 x3 > 1 3 4 x x1 x3 4( x ) 3( x1) 6( x3) 1
Una inecuación es una desigualdad algebraica en la que sus dos miembros aparecen ligados por uno de estos signos:
 INECUACIONES. Una inecuación es una desigualdad algebraica en la que sus dos miembros aparecen ligados por uno de estos signos:, se lee" menor que",se lee" menor o igual que",se lee" mayor que",se lee
INECUACIONES. Una inecuación es una desigualdad algebraica en la que sus dos miembros aparecen ligados por uno de estos signos:, se lee" menor que",se lee" menor o igual que",se lee" mayor que",se lee
REPRESENTACIONES GRÁFICAS
 REPRESENTACIONES GRÁFICAS 1. Qué son? Son gráficos que permiten mostrar la respuesta en frecuencia de un sistema lineal. Son herramientas útiles para el análisis, síntesis y diseño. 2. Diagrama de Bode
REPRESENTACIONES GRÁFICAS 1. Qué son? Son gráficos que permiten mostrar la respuesta en frecuencia de un sistema lineal. Son herramientas útiles para el análisis, síntesis y diseño. 2. Diagrama de Bode
Límite de una función
 Idea intuitiva de límite Límite de una función El límite de la función f(x) en el punto x 0, es el valor al que se acercan las imágenes (las y) cuando los originales (las x) se acercan al valor x 0. Es
Idea intuitiva de límite Límite de una función El límite de la función f(x) en el punto x 0, es el valor al que se acercan las imágenes (las y) cuando los originales (las x) se acercan al valor x 0. Es
GEOMETRÍA ANALÍTICA LA CIRCUNFERENCIA
 LA CIRCUNFERENCIA CONTENIDO. Ecuación común de la circunferencia Ejemplos. Ecuación general de la circunferencia. Análisis de la ecuación. Ejercicios Estudiaremos cuatro curvas que por su importancia aplicaciones
LA CIRCUNFERENCIA CONTENIDO. Ecuación común de la circunferencia Ejemplos. Ecuación general de la circunferencia. Análisis de la ecuación. Ejercicios Estudiaremos cuatro curvas que por su importancia aplicaciones
CONCEPTOS BASICOS DE LA TRANSFORMADA DE LAPLACE LA TRANSFORMADA DE LAPLACE
 LA TRANSFORMADA DE LAPLACE Por cálculo integral sabemos que cuando vamos a determinar una integral impropia de la forma,su desarrollo se obtiene realizando un cambio de variable en el límite superior de
LA TRANSFORMADA DE LAPLACE Por cálculo integral sabemos que cuando vamos a determinar una integral impropia de la forma,su desarrollo se obtiene realizando un cambio de variable en el límite superior de
NOTACIÓN Y REPRESENTACIÓN
 TEORÍA NÚMEROS COMPLEJOS DEFINICIÓN: Los números complejos son el conjunto de todos los números reales e imaginarios. Surgen de la necesidad de expresar la raíz par de un número negativo. APLICACIÓN: Los
TEORÍA NÚMEROS COMPLEJOS DEFINICIÓN: Los números complejos son el conjunto de todos los números reales e imaginarios. Surgen de la necesidad de expresar la raíz par de un número negativo. APLICACIÓN: Los
ETS Minas: Métodos matemáticos Ejercicios resueltos Tema 1 Preliminares
 ETS Minas: Métodos matemáticos Ejercicios resueltos Tema Preliminares Francisco Palacios Escuela Politécnica Superior de Ingeniería de Manresa Universidad Politécnica de Cataluña Curso 006/07 Agosto 006,
ETS Minas: Métodos matemáticos Ejercicios resueltos Tema Preliminares Francisco Palacios Escuela Politécnica Superior de Ingeniería de Manresa Universidad Politécnica de Cataluña Curso 006/07 Agosto 006,
CIRCUITOS ELÉCTRICOS. Temas:
 CIRCUITOS ELÉCTRICOS Temas: - Conceptos generales de circuitos eléctricos, ley de Ohm y de Kirchhoff. - Energía almacenada en bobinas y capacitores. - Teoremas de redes: Thevenin, Norton, superposición,
CIRCUITOS ELÉCTRICOS Temas: - Conceptos generales de circuitos eléctricos, ley de Ohm y de Kirchhoff. - Energía almacenada en bobinas y capacitores. - Teoremas de redes: Thevenin, Norton, superposición,
Inecuaciones: Actividades de recuperación.
 Inecuaciones: Actividades de recuperación. 1.- Escribe la inecuación que corresponde a los siguientes enunciados: a) El perímetro de un triángulo equilátero es menor que 4. (x = lado del triángulo) b)
Inecuaciones: Actividades de recuperación. 1.- Escribe la inecuación que corresponde a los siguientes enunciados: a) El perímetro de un triángulo equilátero es menor que 4. (x = lado del triángulo) b)
Apuntes de dibujo de curvas
 Apuntes de dibujo de curvas El objetivo de estas notas es dar unas nociones básicas sobre dibujo de curvas definidas por medio de ecuaciones cartesianas explícitas o paramétricas y polares: 1. Curvas en
Apuntes de dibujo de curvas El objetivo de estas notas es dar unas nociones básicas sobre dibujo de curvas definidas por medio de ecuaciones cartesianas explícitas o paramétricas y polares: 1. Curvas en
Tema 6. Diseño de controladores discretos
 Ingeniería de Control Tema 6. Diseño de controladores discretos Daniel Rodríguez Ramírez Teodoro Alamo Cantarero Contextualización del tema Conocimientos que se adquieren en este tema: Como obtener el
Ingeniería de Control Tema 6. Diseño de controladores discretos Daniel Rodríguez Ramírez Teodoro Alamo Cantarero Contextualización del tema Conocimientos que se adquieren en este tema: Como obtener el
Representación en el espacio de estado. Sistemas Control Embebidos e Instrumentación Electrónica UNIVERSIDAD EAFIT
 Representación en el espacio de estado Representación en espacio de estado Control clásico El modelado y control de sistemas basado en la transformada de Laplace, es un enfoque muy sencillo y de fácil
Representación en el espacio de estado Representación en espacio de estado Control clásico El modelado y control de sistemas basado en la transformada de Laplace, es un enfoque muy sencillo y de fácil
Tema 7.0. Repaso de números reales y de funciones
 Matemáticas II (Bachillerato de Ciencias) Análisis: Repaso de números reales y de funciones 47 Tema 70 Repaso de números reales y de funciones El conjunto de los números reales El conjunto de los números
Matemáticas II (Bachillerato de Ciencias) Análisis: Repaso de números reales y de funciones 47 Tema 70 Repaso de números reales y de funciones El conjunto de los números reales El conjunto de los números
METODO DE LOS COEFICIENTES INDETERMINADOS 1 METODO DE COEFICIENTES INDETERMINADOS
 METODO DE LOS COEFICIENTES INDETERMINADOS 1 METODO DE COEFICIENTES INDETERMINADOS Para encontrar la solución de la Ecuacion diferencial de orden n definida por Donde los son constantes y f(x) es un función
METODO DE LOS COEFICIENTES INDETERMINADOS 1 METODO DE COEFICIENTES INDETERMINADOS Para encontrar la solución de la Ecuacion diferencial de orden n definida por Donde los son constantes y f(x) es un función
Guía de Matemática Tercero Medio
 Guía de Matemática Tercero Medio Aprendizaje Esperado: 1. Plantean y resuelven problemas que involucran ecuaciones de segundo grado; explicitan sus procedimientos de solución y analizan la existencia y
Guía de Matemática Tercero Medio Aprendizaje Esperado: 1. Plantean y resuelven problemas que involucran ecuaciones de segundo grado; explicitan sus procedimientos de solución y analizan la existencia y
ECUACIÓN DE OSCILACIONES. Tomado del texto de Ecuaciones Diferenciales de los Profesores. Norman Mercado. Luis Ignacio Ordoñéz
 ECUACIÓN DE OSCILACIONES Tomado del texto de Ecuaciones Diferenciales de los Profesores Norman Mercado Luis Ignacio Ordoñéz Muchos de los sistemas de ingeniería están regidos por una ecuación diferencial
ECUACIÓN DE OSCILACIONES Tomado del texto de Ecuaciones Diferenciales de los Profesores Norman Mercado Luis Ignacio Ordoñéz Muchos de los sistemas de ingeniería están regidos por una ecuación diferencial
MATEMÁTICAS 1º BACH. C. N. Y S. 25 de enero de 2010 Geometría y Logaritmos
 MATEMÁTICAS 1º BACH. C. N. Y S. 5 de enero de 010 Geometría y Logaritmos x yz 1) Tomar logaritmos, y desarrollar, en la siguiente expresión: A 4 ab log x log b 4log a log y ) Quitar logaritmos: log A )
MATEMÁTICAS 1º BACH. C. N. Y S. 5 de enero de 010 Geometría y Logaritmos x yz 1) Tomar logaritmos, y desarrollar, en la siguiente expresión: A 4 ab log x log b 4log a log y ) Quitar logaritmos: log A )
Manual de la Práctica 5: Diseño de un controlador digital
 Control por Computador Manual de la Práctica 5: Diseño de un controlador digital Jorge Pomares Baeza Francisco Andrés Candelas Herías Grupo de Innovación Educativa en Automática 009 GITE IEA - 1 - Introducción
Control por Computador Manual de la Práctica 5: Diseño de un controlador digital Jorge Pomares Baeza Francisco Andrés Candelas Herías Grupo de Innovación Educativa en Automática 009 GITE IEA - 1 - Introducción
Espacios Vectoriales Asturias: Red de Universidades Virtuales Iberoamericanas 1
 Espacios Vectoriales 201 6Asturias: Red de Universidades Virtuales Iberoamericanas 1 Índice 1 Espacios Vectoriales... 4 1.1 Definición de espacio vectorial... 4 1.2 Definición de subespacio vectorial...
Espacios Vectoriales 201 6Asturias: Red de Universidades Virtuales Iberoamericanas 1 Índice 1 Espacios Vectoriales... 4 1.1 Definición de espacio vectorial... 4 1.2 Definición de subespacio vectorial...
Sistemas Lineales e Invariantes PRÁCTICA 2
 Sistemas Lineales e Invariantes PRÁCTICA 2 (1 sesión) Laboratorio de Señales y Comunicaciones PRÁCTICA 2 Sistemas Lineales e Invariantes 1. Objetivo Los objetivos de esta práctica son: Revisar los sistemas
Sistemas Lineales e Invariantes PRÁCTICA 2 (1 sesión) Laboratorio de Señales y Comunicaciones PRÁCTICA 2 Sistemas Lineales e Invariantes 1. Objetivo Los objetivos de esta práctica son: Revisar los sistemas
Límite de una Función
 Cálculo _Comisión Año 06 Límite de una Función I) Límite Finito Muchas veces interesa analizar el comportamiento de los valores de una función, para valores de la variable independiente cercanos a uno
Cálculo _Comisión Año 06 Límite de una Función I) Límite Finito Muchas veces interesa analizar el comportamiento de los valores de una función, para valores de la variable independiente cercanos a uno
Colegio Universitario Boston
 Función Lineal. Si f función polinomial de la forma o, donde y son constantes reales se considera una función lineal, en esta nos la pendiente o sea la inclinación que tendrá la gráfica de la función,
Función Lineal. Si f función polinomial de la forma o, donde y son constantes reales se considera una función lineal, en esta nos la pendiente o sea la inclinación que tendrá la gráfica de la función,
DERIVABILIDAD. 1+x 2. para x [1, 3]
![DERIVABILIDAD. 1+x 2. para x [1, 3]](/thumbs/54/33118648.jpg "DERIVABILIDAD. 1+x 2. para x [1, 3]") 1 DERIVABILIDAD 1. Definir derivada y derivadas laterales de una función en un punto. Probar que la función f es derivable en =1 y que la derivada lateral por la derecha en =0 es infinito. para [0, 1)
1 DERIVABILIDAD 1. Definir derivada y derivadas laterales de una función en un punto. Probar que la función f es derivable en =1 y que la derivada lateral por la derecha en =0 es infinito. para [0, 1)
CONTINUIDAD DE FUNCIONES. SECCIONES A. Definición de función continua. B. Propiedades de las funciones continuas. C. Ejercicios propuestos.
 CAPÍTULO IV. CONTINUIDAD DE FUNCIONES SECCIONES A. Definición de función continua. B. Propiedades de las funciones continuas. C. Ejercicios propuestos. 121 A. DEFINICIÓN DE FUNCIÓN CONTINUA. Una función
CAPÍTULO IV. CONTINUIDAD DE FUNCIONES SECCIONES A. Definición de función continua. B. Propiedades de las funciones continuas. C. Ejercicios propuestos. 121 A. DEFINICIÓN DE FUNCIÓN CONTINUA. Una función
EJERCICIOS REPASO 2ª EVALUACIÓN
 MATRICES Y DETERMINANTES 1.) Sean las matrices: EJERCICIOS REPASO 2ª EVALUACIÓN a) Encuentre el valor o valores de x de forma que b) Igualmente para que c) Determine x para que 2.) Dadas las matrices:
MATRICES Y DETERMINANTES 1.) Sean las matrices: EJERCICIOS REPASO 2ª EVALUACIÓN a) Encuentre el valor o valores de x de forma que b) Igualmente para que c) Determine x para que 2.) Dadas las matrices:
FUNCIONES. Función. π k π +, k } (los puntos que quitamos anulan el coseno). 2. tg x: {x / x =
. 2. tg x: {x / x =") Función FUNCIONES Es una relación entre dos magnitudes variables, de tal manera que a cada valor de la primera, llamada independiente, le corresponde un único valor de la segunda, llamada dependiente.
Función FUNCIONES Es una relación entre dos magnitudes variables, de tal manera que a cada valor de la primera, llamada independiente, le corresponde un único valor de la segunda, llamada dependiente.
2. El conjunto de los números complejos
 Números complejos 1 Introducción El nacimiento de los números complejos se debió a la necesidad de dar solución a un problema: no todas las ecuaciones polinómicas poseen una solución real El ejemplo más
Números complejos 1 Introducción El nacimiento de los números complejos se debió a la necesidad de dar solución a un problema: no todas las ecuaciones polinómicas poseen una solución real El ejemplo más
Lugar Geométrico de las Raíces
 Lugar Geométrico de la Raíce N de práctica: 9 Tema Correpondiente: Lugar geométrico de la raíce Nombre completo del alumno Firma N de brigada: Fecha de elaboración: Grupo: Elaborado por: Reviado por: Autorizado
Lugar Geométrico de la Raíce N de práctica: 9 Tema Correpondiente: Lugar geométrico de la raíce Nombre completo del alumno Firma N de brigada: Fecha de elaboración: Grupo: Elaborado por: Reviado por: Autorizado
EJERCICIOS RESUELTOS DE INTEGRAL DEFINIDA
 EJERCICIOS RESUELTOS DE INTEGRAL DEFINIDA. Calcular las siguientes integrales definidas: b) d e d c) + d d) d e) sen d f) + d d ( ) En primer lugar se ha calculado una primitiva de f() Barrow. y después
EJERCICIOS RESUELTOS DE INTEGRAL DEFINIDA. Calcular las siguientes integrales definidas: b) d e d c) + d d) d e) sen d f) + d d ( ) En primer lugar se ha calculado una primitiva de f() Barrow. y después
LUGAR GEOMÉTRICO DE LAS RAICES (LGR)
") LUGAR GEOMÉTRICO DE LAS RAICES (LGR) DEFINICIÓN: El lugar geométrico de las raíces es la trayectoria formada por las raíces de una ecuación polinómica cuando un parámetro de ésta varía. En el caso de Sistemas
LUGAR GEOMÉTRICO DE LAS RAICES (LGR) DEFINICIÓN: El lugar geométrico de las raíces es la trayectoria formada por las raíces de una ecuación polinómica cuando un parámetro de ésta varía. En el caso de Sistemas
UNIDAD 8 INECUACIONES. Objetivo general.
 8. 1 UNIDAD 8 INECUACIONES Objetivo general. Al terminar esta Unidad resolverás inecuaciones lineales y cuadráticas e inecuaciones que incluyan valores absolutos, identificarás sus conjuntos solución en
8. 1 UNIDAD 8 INECUACIONES Objetivo general. Al terminar esta Unidad resolverás inecuaciones lineales y cuadráticas e inecuaciones que incluyan valores absolutos, identificarás sus conjuntos solución en
TEMA 8. GEOMETRÍA ANALÍTICA.
 TEMA 8. GEOMETRÍA ANALÍTICA. 8..- El plano. Definimos el plano euclideo como el conjunto de puntos ( x, y) R. Así, cada punto del plano posee dos coordenadas. Para representar puntos del plano utilizaremos
TEMA 8. GEOMETRÍA ANALÍTICA. 8..- El plano. Definimos el plano euclideo como el conjunto de puntos ( x, y) R. Así, cada punto del plano posee dos coordenadas. Para representar puntos del plano utilizaremos
No es otra cosa, que la representación de los resultados de una función sobre el plano carteciano.
 FUNCIONES GRAFICAS No es otra cosa, que la representación de los resultados de una función sobre el plano carteciano. INTÉRVALOS Un intervalo es el conjunto de todos los números reales entre dos números
FUNCIONES GRAFICAS No es otra cosa, que la representación de los resultados de una función sobre el plano carteciano. INTÉRVALOS Un intervalo es el conjunto de todos los números reales entre dos números
Técnicas Avanzadas de Control Memoria de ejercicios
 Memoria de ejercicios Curso: 2007/08 Titulación: Ingeniero Técnico Industrial Especialidad: Electrónica Industrial Alumno: Adolfo Hilario Tutor: Adolfo Hilario Caballero Índice general Presentación. 2..
Memoria de ejercicios Curso: 2007/08 Titulación: Ingeniero Técnico Industrial Especialidad: Electrónica Industrial Alumno: Adolfo Hilario Tutor: Adolfo Hilario Caballero Índice general Presentación. 2..
TEMA 6. Ángulos, distancias, simetrías Problemas Resueltos
 Matemáticas II (Bachillerato de Ciencias) Soluciones de los problemas propuestos Tema 6 88 Ángulos entre rectas y planos TEMA 6 Ángulos, distancias, simetrías Problemas Resueltos Dadas las rectas r y s
Matemáticas II (Bachillerato de Ciencias) Soluciones de los problemas propuestos Tema 6 88 Ángulos entre rectas y planos TEMA 6 Ángulos, distancias, simetrías Problemas Resueltos Dadas las rectas r y s
Tema 7: Geometría Analítica. Rectas.
 Tema 7: Geometría Analítica. Rectas. En este tema nos centraremos en estudiar la geometría en el plano, así como los elementos que en este aparecen como son los puntos, segmentos, vectores y rectas. Estudiaremos
Tema 7: Geometría Analítica. Rectas. En este tema nos centraremos en estudiar la geometría en el plano, así como los elementos que en este aparecen como son los puntos, segmentos, vectores y rectas. Estudiaremos
Infinito más un número Infinito más infinito. Infinito por infinito. OPERACIONES CON INFINITO Sumas con infinito. Productos con infinito
 OPERACIONES CON INFINITO Sumas con infinito Infinito más un número Infinito más infinito Infinito menos infinito Productos con infinito Infinito por un número Infinito por infinito Infinito por cero Cocientes
OPERACIONES CON INFINITO Sumas con infinito Infinito más un número Infinito más infinito Infinito menos infinito Productos con infinito Infinito por un número Infinito por infinito Infinito por cero Cocientes
La función, definida para toda, es periódica si existe un número positivo tal que
 Métodos con series de Fourier Definición: Función periódica La función, definida para toda, es periódica si existe un número positivo tal que para toda. El número en un periodo de la función. Si existe
Métodos con series de Fourier Definición: Función periódica La función, definida para toda, es periódica si existe un número positivo tal que para toda. El número en un periodo de la función. Si existe
Las Funciones Trigonométricas. Sección 5.3 Funciones Trigonométricas de números reales
 5 Las Funciones Trigonométricas Sección 5.3 Funciones Trigonométricas de números reales Qué hemos visto? Si el lado inicial de un ángulo,, coincide con la parte del eje de x que se encuentra en el primer
5 Las Funciones Trigonométricas Sección 5.3 Funciones Trigonométricas de números reales Qué hemos visto? Si el lado inicial de un ángulo,, coincide con la parte del eje de x que se encuentra en el primer
( ) m normal. UNIDAD III. DERIVACIÓN Y APLICACIONES FÍSICAS Y GEOMÉTRICAS 3.8. Aplicaciones geométricas de la derivada
 m normal. UNIDAD III. DERIVACIÓN Y APLICACIONES FÍSICAS Y GEOMÉTRICAS 3.8. Aplicaciones geométricas de la derivada") UNIDAD III. DERIVACIÓN Y APLICACIONES FÍSICAS Y GEOMÉTRICAS 3.8. Aplicaciones geométricas de la derivada Dirección de una curva Dado que la derivada de f (x) se define como la pendiente de la recta tangente
UNIDAD III. DERIVACIÓN Y APLICACIONES FÍSICAS Y GEOMÉTRICAS 3.8. Aplicaciones geométricas de la derivada Dirección de una curva Dado que la derivada de f (x) se define como la pendiente de la recta tangente
es el lugar geométrico de los puntos p tales que p 0 p n o p 0 p o. p x ; y ; z perteneciente a y un vector no
 El Plano y la Recta en el Espacio Matemática 4º Año Cód. 145-15 P r o f. M a r í a d e l L u j á n M a r t í n e z P r o f. J u a n C a r l o s B u e P r o f. M i r t a R o s i t o P r o f. V e r ó n i
El Plano y la Recta en el Espacio Matemática 4º Año Cód. 145-15 P r o f. M a r í a d e l L u j á n M a r t í n e z P r o f. J u a n C a r l o s B u e P r o f. M i r t a R o s i t o P r o f. V e r ó n i
REPRESENTACIÓN DE FUNCIONES
 8 REPRESENTACIÓN DE FUNCIONES Página 86 Descripción de una gráfica. Copia en tu cuaderno los datos encuadrados en rojo. A partir de ellos y sin mirar la gráfica que aparece al principio, representa esta
8 REPRESENTACIÓN DE FUNCIONES Página 86 Descripción de una gráfica. Copia en tu cuaderno los datos encuadrados en rojo. A partir de ellos y sin mirar la gráfica que aparece al principio, representa esta
Forma polar de números complejos (repaso breve)
") Forma polar de números complejos (repaso breve) Objetivos. pasar la forma polar de números complejos. quisitos. Números complejos, funciones trigonométricas, valor absoluto de números complejos, circunferencia
Forma polar de números complejos (repaso breve) Objetivos. pasar la forma polar de números complejos. quisitos. Números complejos, funciones trigonométricas, valor absoluto de números complejos, circunferencia
CONSTRUCCIÓN DE UNA FUNCIÓN POLINOMIAL
 CONSTRUCCIÓN DE UNA FUNCIÓN POLINOMIAL Sugerencias para quien imparte el curso Se deben revisar los trazos que los alumnos realicen para el bosquejo de sus graficas, el error en un signo de alguna raíz
CONSTRUCCIÓN DE UNA FUNCIÓN POLINOMIAL Sugerencias para quien imparte el curso Se deben revisar los trazos que los alumnos realicen para el bosquejo de sus graficas, el error en un signo de alguna raíz
EJERCICIOS DE CONTROL POR COMPUTADOR BOLETIN V: SISTEMAS DISCRETOS (I)
") C. Determine el valor al que tenderá en régimen permanente la salida ante un escalón de amplitud 3 a la entrada del sistema discreto dado por: z.7 G( z) ( z.5) z C. a) Determinar la región del plano z
C. Determine el valor al que tenderá en régimen permanente la salida ante un escalón de amplitud 3 a la entrada del sistema discreto dado por: z.7 G( z) ( z.5) z C. a) Determinar la región del plano z
Sistemas Control Embebidos e Instrumentación Electrónica UNIVERSIDAD EAFIT Semestre 2010/2 2009/2
 DIAGRAMA DE NYQUIST Semestre 2010/2 La respuesta en frecuencia se basa en la respuesta en estado estacionario de un sistema ante una entrada senoidal. Un sistema lineal invariante en el tiempo, si es afectado
DIAGRAMA DE NYQUIST Semestre 2010/2 La respuesta en frecuencia se basa en la respuesta en estado estacionario de un sistema ante una entrada senoidal. Un sistema lineal invariante en el tiempo, si es afectado
3.2 Respuesta temporal de los sistemas lineales de segundo orden de tiempo continuo sin ceros
 38 Capítulo 3. Respuesta temporal 3.2 Respuesta temporal de los sistemas lineales de segundo orden de tiempo continuo sin ceros Herramienta interactiva: 3.2. t_segundo_orden Conceptos analizados en la
38 Capítulo 3. Respuesta temporal 3.2 Respuesta temporal de los sistemas lineales de segundo orden de tiempo continuo sin ceros Herramienta interactiva: 3.2. t_segundo_orden Conceptos analizados en la
Álgebra Lineal II: Grupos y campos, prueba de los axiomas del campo de los números complejos, forma polar de números complejos.
 Álgebra Lineal II: Grupos y campos, prueba de los axiomas del campo de los números complejos, forma polar de números complejos. José María Rico Martínez Departamento de Ingeniería Mecánica División de
Álgebra Lineal II: Grupos y campos, prueba de los axiomas del campo de los números complejos, forma polar de números complejos. José María Rico Martínez Departamento de Ingeniería Mecánica División de
LÍMITE DE UNA FUNCIÓN EN UN PUNTO
 pág. LÍMITE DE UNA FUNCIÓN EN UN PUNTO c significa que toma valores cada vez más próimos a c. Se lee tiende a c. Por ejemplo: ; `9; `; `; `; `; `9; `; `999; Es una secuencia de números cada vez más próimos
pág. LÍMITE DE UNA FUNCIÓN EN UN PUNTO c significa que toma valores cada vez más próimos a c. Se lee tiende a c. Por ejemplo: ; `9; `; `; `; `; `9; `; `999; Es una secuencia de números cada vez más próimos
1. Información básica
 Información básica PRÁCTICA : RESOLUCIÓN DE ECUACIONES POLIO INÓMICAS Comenzamos recordando de forma resumida las ideas y propiedades básicas de las ecuaciones polinómicas y sus soluciones En esta sección
Información básica PRÁCTICA : RESOLUCIÓN DE ECUACIONES POLIO INÓMICAS Comenzamos recordando de forma resumida las ideas y propiedades básicas de las ecuaciones polinómicas y sus soluciones En esta sección
Derivadas 6 ACTIVIDADES. 1. Página 140. Función f(x) x 2 1: Función g(x) x 3 7: 2. Página Página Página
 x 2 1: Función g(x) x 3 7: 2. Página Página Página") Derivadas 6 ACTIVIDADES 1. Página 140 Función f(x) x 2 1: Función g(x) x 3 7: 2. Página 140 3. Página 141 4. Página 141 5. Página 142 211 Derivadas 6. Página 142 Las derivadas laterales no existen, por
Derivadas 6 ACTIVIDADES 1. Página 140 Función f(x) x 2 1: Función g(x) x 3 7: 2. Página 140 3. Página 141 4. Página 141 5. Página 142 211 Derivadas 6. Página 142 Las derivadas laterales no existen, por
Apellidos: Nombre: para x 1, determina sus asíntotas. 4. Halla el valor de los parámetros m y n para que la función f sea continua en todo.
 EXAMEN DE MATEMÁTICAS CONTINUIDAD Y DERIVABILIDAD Apellidos: Nombre: Curso: º Grupo: C Día: 3- II- 6 CURSO 05-6. Halla el dominio de definición y recorrido de las funciones a) f(x)= 9 b) g(x)= 4. Calcula
EXAMEN DE MATEMÁTICAS CONTINUIDAD Y DERIVABILIDAD Apellidos: Nombre: Curso: º Grupo: C Día: 3- II- 6 CURSO 05-6. Halla el dominio de definición y recorrido de las funciones a) f(x)= 9 b) g(x)= 4. Calcula
Límite de funciones. Por otra parte se dice que una función es discontínua si para algún (os) valor (es) de x no existe valor de y.
 valor (es) de x no existe valor de y.") Límite de funciones El concepto de límite se explica y define desde diferentes perspectivas en los libros de cálculo. Se habla por ejemplo del límite de una sucesión (como ya se explicó), o bien del límite
Límite de funciones El concepto de límite se explica y define desde diferentes perspectivas en los libros de cálculo. Se habla por ejemplo del límite de una sucesión (como ya se explicó), o bien del límite
Límite de una función
 Límite de una función El límite de la función f(x) en el punto x 0, es el valor al que se acercan las imágenes (las y) cuando los originales (las x) se acercan al valor x 0. Es decir el valor al que tienden
Límite de una función El límite de la función f(x) en el punto x 0, es el valor al que se acercan las imágenes (las y) cuando los originales (las x) se acercan al valor x 0. Es decir el valor al que tienden
Matemáticas B 4º E.S.O. Polinomios y fracciones algebraicas. 1. x 5x 2 6 5
 Matemáticas B 4º E.S.O. Polinomios y fracciones algebraicas. 1 POLINOMIOS Y FRACCIONES ALGEBRAICAS.1 COCIENTE DE POLINOMIOS COCIENTE DE MONOMIOS El cociente de un monomio entre otro monomio de grado igual
Matemáticas B 4º E.S.O. Polinomios y fracciones algebraicas. 1 POLINOMIOS Y FRACCIONES ALGEBRAICAS.1 COCIENTE DE POLINOMIOS COCIENTE DE MONOMIOS El cociente de un monomio entre otro monomio de grado igual
Función de dos variables
 Funciones de dos y más variables, dominio y rango, y curva de nivel Marlon Fajardo Molinares - fenix.75@hotmail.com 1. Función de dos variables 2. Funciones de varias variables 3. Método para hallar el
Funciones de dos y más variables, dominio y rango, y curva de nivel Marlon Fajardo Molinares - fenix.75@hotmail.com 1. Función de dos variables 2. Funciones de varias variables 3. Método para hallar el
Un subconjunto no vacío H de un espacio vectorial V es un subespacio de V si se cumplen las dos reglas de cerradura:
 4 Subespacios 29 b) x 5 [25;5], 5 [;24], z 5 [4;4] Use a 5 2, a 5 / a 5 2 / 2 c) Su propia elección de x,, z /o a 2 a) Elija algunos valores para n m genere tres matrices aleatorias de n m, llamadas X,
4 Subespacios 29 b) x 5 [25;5], 5 [;24], z 5 [4;4] Use a 5 2, a 5 / a 5 2 / 2 c) Su propia elección de x,, z /o a 2 a) Elija algunos valores para n m genere tres matrices aleatorias de n m, llamadas X,
MÓDULO 8: VECTORES. Física
 MÓDULO 8: VECTORES Física Magnitud vectorial. Elementos. Producto de un vector por un escalar. Operaciones vectoriales. Vector unitario. Suma de vectores por el método de componentes rectangulares. UTN
MÓDULO 8: VECTORES Física Magnitud vectorial. Elementos. Producto de un vector por un escalar. Operaciones vectoriales. Vector unitario. Suma de vectores por el método de componentes rectangulares. UTN
1 er Problema. 2 Problema
 Facultad de Contaduría Administración. UNAM Lugares geométricos Autor: Dr. José Manuel Becerra Espinosa MATEMÁTICAS BÁSICAS LUGARES GEOMÉTRICOS Eisten dos problemas fundamentales en la Geometría Analítica:.
Facultad de Contaduría Administración. UNAM Lugares geométricos Autor: Dr. José Manuel Becerra Espinosa MATEMÁTICAS BÁSICAS LUGARES GEOMÉTRICOS Eisten dos problemas fundamentales en la Geometría Analítica:.
y cualquier par (x, y) puede escalarse, multiplicarse por un número real s, para obtener otro vector (sx, sy).
 puede escalarse, multiplicarse por un número real s, para obtener otro vector (sx, sy).") UNIDAD II: VECTORES EN DOS Y TRES DIMENSIONES Un espacio vectorial (o espacio lineal) es el objeto básico de estudio en la rama de la matemática llamada álgebra lineal. A los elementos de los espacios
UNIDAD II: VECTORES EN DOS Y TRES DIMENSIONES Un espacio vectorial (o espacio lineal) es el objeto básico de estudio en la rama de la matemática llamada álgebra lineal. A los elementos de los espacios
Capítulo 2 Análisis espectral de señales
 Capítulo 2 Análisis espectral de señales Objetivos 1. Se pretende que el alumno repase las herramientas necesarias para el análisis espectral de señales. 2. Que el alumno comprenda el concepto de espectro
Capítulo 2 Análisis espectral de señales Objetivos 1. Se pretende que el alumno repase las herramientas necesarias para el análisis espectral de señales. 2. Que el alumno comprenda el concepto de espectro
Unidad 2: Ecuaciones, inecuaciones y sistemas.
 Unidad 2: Ecuaciones, inecuaciones y sistemas 1 Unidad 2: Ecuaciones, inecuaciones y sistemas. 1.- Factorización de polinomios. M. C. D y m.c.m de polinomios. Un número a es raíz de un polinomio es 0.
Unidad 2: Ecuaciones, inecuaciones y sistemas 1 Unidad 2: Ecuaciones, inecuaciones y sistemas. 1.- Factorización de polinomios. M. C. D y m.c.m de polinomios. Un número a es raíz de un polinomio es 0.
Se llama lugar geométrico a un conjunto de puntos que cumplen una cierta propiedad.
 LUGARES GEOMÉTRICOS. CÓNICAS. 9.1 LUGARES GEOMÉTRICOS Se llama lugar geométrico a un conjunto de puntos que cumplen una cierta propiedad. Llamando X(,) a las coordenadas del punto genérico aplicando analíticamente
LUGARES GEOMÉTRICOS. CÓNICAS. 9.1 LUGARES GEOMÉTRICOS Se llama lugar geométrico a un conjunto de puntos que cumplen una cierta propiedad. Llamando X(,) a las coordenadas del punto genérico aplicando analíticamente
TEMA 7: PROBLEMAS MÉTRICOS EN EL ESPACIO
 TEMA 7 Ejercicios / TEMA 7: PROBLEMAS MÉTRICOS EN EL ESPACIO. Calcula el ángulo que forman las rectas x y 4 z 5 y x y 4 z 5 Como los vectores directores u,4,5 y v,4,5 son perpendiculares, las rectas son
TEMA 7 Ejercicios / TEMA 7: PROBLEMAS MÉTRICOS EN EL ESPACIO. Calcula el ángulo que forman las rectas x y 4 z 5 y x y 4 z 5 Como los vectores directores u,4,5 y v,4,5 son perpendiculares, las rectas son
MATEMÁTICAS APLICADAS A LAS C.C. SOCIALES
 MATEMÁTICAS APLICADAS A LAS C.C. SOCIALES CAPÍTULO 5 Curso preparatorio de la prueba de acceso a la universidad para mayores de 25 años curso 2010/11 Nuria Torrado Robles Departamento de Estadística Universidad
MATEMÁTICAS APLICADAS A LAS C.C. SOCIALES CAPÍTULO 5 Curso preparatorio de la prueba de acceso a la universidad para mayores de 25 años curso 2010/11 Nuria Torrado Robles Departamento de Estadística Universidad