Salida = Valor deseado (referencia) Para todo el tiempo posible!!! jlc
|
|
|
- Hugo Villalba Murillo
- hace 6 años
- Vistas:
Transcripción

1
2 Control: Se debe lograr que unas variables de salida de un sistema se comporten de acuerdo a nuestro deseo. La fuerza del ego humana puesta al servicio de la ingeniería Salida = Valor deseado (referencia) Para todo el tiempo posible!!! y( t) r( t)
3 o Mejorar la estabilidad (inestabilidad, robustez) o Precisión en la respuesta estacionaria del sistema (error, perturbaciones) o Mejorar la respuesta transitoria (tiempo, sobrepico)
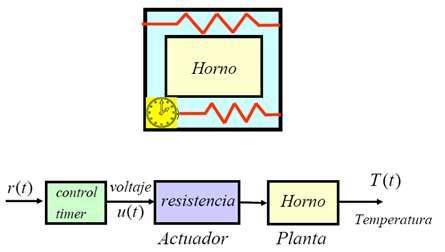
4 Referencia r(t) Controlador Señal de Control u(t) Perturbaciones Planta Salida(s) y(t) o Se basa en la calibración de los puntos de operación y las posibles perturbaciones. o Debe ser monitoreado y calibrado con relativa frecuencia.
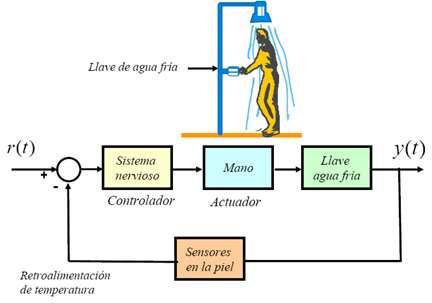
5 Perturbaciones Referencia r(t) + - Error e(t) C Señal de Control u(t) G Salida y(t) ym(t) Señal Medida H La salida se compara con la entrada del sistema de tal manera que la acción de control apropiada se pueda formar como alguna función que dependa de la entrada y la salida
6 r(t) e(t) u(t) p(t) y(t) + - Controlador Driver Potencia Actuador Planta ym(t) Transmisor Sensor

7 Posición por tiempo de banda transportadora
8 Temperatura por tiempo
9
10 En un sistema de control de dos posiciones, en muchos casos, son simplemente encendido y apagado. El control de dos posiciones o de ON-OFF es relativamente simple y barato, razón por la cual su uso es extendido en sistemas de control tanto industriales como domésticos.

11 Esto lo podemos convertir en un automatismo de control ON-OFF. Procesamos señales eléctricas para controlar la temperatura.

12 La ley de control para este tipo de sistemas:

13 Sobreactuación del actuador Ciclo Límite: oscilación estable alrededor de un punto de equilibrio
14 La sobreactuación del actuador conlleva que en sistemas lentos (por ejemplo sistemas térmicos) debamos incluir un ciclo de histéresis en el controlador. El ciclo de histéresis es hacer que las acciones de encendido y apagado del actuador se produzcan en valores distintos del error e(t) o de la salida y(t)

15

16 Regulador de voltaje en un circuito RC

17 Regulador de voltaje en circuito RC en cascada

18 Regulador de voltaje en circuito RC en cascada


19
20 Se desea que el error de estado estacionario sea cero. Se desea que esto ocurra instantáneamente
21 Lograremos, inyectando una gran cantidad de energía, que el tiempo de establecimiento sea pequeño (dependerá de que tanta energía). La salida tenderá a la referencia, para valores de tiempo grandes. (Rastreo asintótico) o existirá algún error estacionario remanente.
22 e r y u ( t) : k e Señal de control proporcional
23 Con el avanzar del tiempo la señal de control queda en función del error en estado estacionario. u k e ee Es de suponer que la señal de control debe estar presente en el sistema para mantener el seguimiento de la referencia y que la constante k0 es por esto que: en conclusión un controlador proporcional mantiene un error estacionario en la respuesta del sistema. u 0 e 0 ee
24
25 Como se puede apreciar cambios en la ganancia del controlador K, genera cambio en la respuesta del sistema y la ubicación de los polos de sistema retroalimentado, tal como se muestra en la figura
26

27 El error estacionario y los integradores
28 La señal de control debe ir hacia un valor constante. (De lo contrario el sistema seria inestable). Si tomamos la integral del error desde el momento en que se alcanza el estado estacionario: u( t) u( t) u constante u ee k i e ee ee k s t i T ( t T s e ee dt ), t T s Esta ecuación debe ser válida para todo t, esto sólo si e ee 0
29
30 Como se puede observar la constante integral Ki influye en el tiempo de respuesta, sobrepico y estabilidad (probar Ki=60) del sistema retroalimentado. Además la acción integral hace cero el e ee para respuesta al escalón.
31
32 Otra mejora importante que se hace en un controlador es introducir una acción anticipativa, que de cierta manera prevea el futuro (un comportamiento predictivo). Puesto que una derivada aproximada se puede calcular como la diferencia de ( t) e( t Td ) e( t) dt T Podemos, dentro de cierto horizonte, prever el comportamiento futuro a partir de la derivada e( t T ) e( t) T d d d d e( t) dt

33 La idea central de la inserción de la acción derivativa en un controlador, es lograr un efecto de futurismo, de predicción. Adivinar, en cierta manera, que pasará con la salida e iniciar una acción correctiva antes.
34
35 Ventajas e inconvenientes: Mejora el amortiguamiento y reduce el sobreimpulso máximo. Incrementa el tiempo de subida. Disminuye el ancho de banda.
36 Ventajas e inconvenientes: Mejora el margen de ganancia, el margen de fase. Filtra el ruido de alta frecuencia. El problema de seleccionar una combinación adecuada de KI y KP para que el condensador del circuito implementado no sea excesivamente grande, es más agudo que en el caso del controlador PD.
37 Ventajas e Inconvenientes Mejora el amortiguamiento y reduce el sobreimpulso máximo. Reduce el tiempo de subida y el de estabilización. Incrementa el ancho de banda (BW).
38 Ventajas e Inconvenientes Mejora el margen de ganancia (GM), el margen de fase (PM) y el pico de resonancia Mr (disminuye). Puede acentuar el ruido en altas frecuencias. No es efectivo para sistemas ligeramente amortiguados o inicialmente inestables.
39 Ventajas e Inconvenientes Puede requerir elementos grandes (como condensadores) en la implementación del circuito compensador.

40 Acción Proporcional + Integral + Derivativa Cada acción del PID se puede ver en un horizonte de la señal de error
41 La señal de control en un PID esta dada por Tomando la transformada de Laplace Que podemos escribir como: t d i p dt t de k dt t e k t e k t u 0 ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( s se k s E s k s E k s U d i p ) ( ) ( s E s k s k k s U d i p
42 En el argot industrial se suele escribir la ecuación anterior como : Con las definiciones: t d i dt t de T dt t e T t e k t u 0 ) ( ) ( 1 ) ( ) ( p d d i p i p k k T k k T k k ) ( 1 1 ) ( s E s T T s k s U d i
43 Es muy notoria la mejoría el la respuesta del sistema bajo la acción de este tipo de controladores tanto en el tiempo de establecimiento, y error de estado estacionario.

44 El 95% de los problemas de control en el mundo del control de procesos se resuelven con PID s. En resumen su efecto se ve reflejado mediante:
45
Presentado por: Laura Katherine Gómez Mariño. Universidad Central
 Presentado por: Laura Katherine Gómez Mariño. Universidad Central IMPORTANCIA DEL TEMA ESCOGIDO: Es una herramienta usada en simulación, que es parte crucial en un sistema de control industrial. Un controlador
Presentado por: Laura Katherine Gómez Mariño. Universidad Central IMPORTANCIA DEL TEMA ESCOGIDO: Es una herramienta usada en simulación, que es parte crucial en un sistema de control industrial. Un controlador
Controlador PID con anti-windup
 Laboratorio de Control de Procesos Industriales Práctica 1 Controlador PID con anti-windup 1 de noviembre de 2008 Introducción 2 INTRODUCCIÓN REGULADORES PID La idea básica del controlador PID es simple
Laboratorio de Control de Procesos Industriales Práctica 1 Controlador PID con anti-windup 1 de noviembre de 2008 Introducción 2 INTRODUCCIÓN REGULADORES PID La idea básica del controlador PID es simple
1.- CORRIENTE CONTINUA CONSTANTE Y CORRIENTE CONTINUA PULSANTE
 UNIDAD 5: CIRCUITOS PARA APLICACIONES ESPECIALES 1.- CORRIENTE CONTINUA CONSTANTE Y CORRIENTE CONTINUA PULSANTE La corriente que nos entrega una pila o una batería es continua y constante: el polo positivo
UNIDAD 5: CIRCUITOS PARA APLICACIONES ESPECIALES 1.- CORRIENTE CONTINUA CONSTANTE Y CORRIENTE CONTINUA PULSANTE La corriente que nos entrega una pila o una batería es continua y constante: el polo positivo
Retardo de transporte
 Retardo de transporte Escalón Escalón con retardo de transporte T Retardo de Transporte. Ejemplo de un Tiristor Tiempo Muerto Ángulo de Disparo (desde controlador) Pulso de disparo Nuevo Pulso de disparo
Retardo de transporte Escalón Escalón con retardo de transporte T Retardo de Transporte. Ejemplo de un Tiristor Tiempo Muerto Ángulo de Disparo (desde controlador) Pulso de disparo Nuevo Pulso de disparo
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones. Robótica Industrial. Universidad de Granada
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Robótica Industrial Universidad de Granada Tema 5: Análisis y Diseño de Sistemas de Control para Robots S.0 S.1 Introducción Sistemas Realimentados
Dpt. Teoría de la Señal, Telemática y Comunicaciones Robótica Industrial Universidad de Granada Tema 5: Análisis y Diseño de Sistemas de Control para Robots S.0 S.1 Introducción Sistemas Realimentados
Acciones básicas de control Clasificación de los controles automáticos
 Acciones básicas de control Clasificación de los controles automáticos 1. Control de dos posiciones o de si-no 2. Controles proporcionales (P) 3. Controles proporcionales e integrales (PI) 4. Controles
Acciones básicas de control Clasificación de los controles automáticos 1. Control de dos posiciones o de si-no 2. Controles proporcionales (P) 3. Controles proporcionales e integrales (PI) 4. Controles
Tema 1. Introducción al Control Automático
 Tema 1. Introducción al Control Automático Automática 2º Curso del Grado en Ingeniería en Tecnología Industrial Contenido Tema 1.- Introducción al Control automático 1.1. Introducción. 1.2. Conceptos y
Tema 1. Introducción al Control Automático Automática 2º Curso del Grado en Ingeniería en Tecnología Industrial Contenido Tema 1.- Introducción al Control automático 1.1. Introducción. 1.2. Conceptos y
Introducción. Culminación de todos los anteriores capítulos. Tipos de compensación. Acción de control. Tipos de acción:
 DISEÑO DE SISTEMAS DE CONTROL 1.-Introducción. 2.-El problema del diseño. 3.-Tipos de compensación. 4.-Reguladores. 4.1.-Acción Proporcional. Reguladores P. 4.2.-Acción Derivativa. Reguladores PD. 4.3.-Acción
DISEÑO DE SISTEMAS DE CONTROL 1.-Introducción. 2.-El problema del diseño. 3.-Tipos de compensación. 4.-Reguladores. 4.1.-Acción Proporcional. Reguladores P. 4.2.-Acción Derivativa. Reguladores PD. 4.3.-Acción
SINTONIZACIÓN DE CONTROLADORES INDUSTRIALES
 CÁTEDRA: SISTEMAS DE CONTROL (PLAN 2004) DOCENTE: Prof. Ing. Mec. Marcos A. Golato SINTONIZACIÓN DE CONTROLADORES INDUSTRIALES 1 CRITERIOS DE ESTABILIDAD EN EL CONTROL La estabilidad del control es la
CÁTEDRA: SISTEMAS DE CONTROL (PLAN 2004) DOCENTE: Prof. Ing. Mec. Marcos A. Golato SINTONIZACIÓN DE CONTROLADORES INDUSTRIALES 1 CRITERIOS DE ESTABILIDAD EN EL CONTROL La estabilidad del control es la
Respuesta transitoria
 Capítulo 4 Respuesta transitoria Una ves que los diagramas a bloques son desarrollados, el siguiente paso es llevar a cabo el análisis de los sistemas. Existen dos tipos de análisis: cuantitativo y cualitativo.
Capítulo 4 Respuesta transitoria Una ves que los diagramas a bloques son desarrollados, el siguiente paso es llevar a cabo el análisis de los sistemas. Existen dos tipos de análisis: cuantitativo y cualitativo.
Introducción a los Sistemas de Control
 Introducción a los Sistemas de Control Organización de la presentación - Introducción a la teoría de control y su utilidad - Ejemplo simple: modelado de un motor de continua que mueve una cinta transportadora.
Introducción a los Sistemas de Control Organización de la presentación - Introducción a la teoría de control y su utilidad - Ejemplo simple: modelado de un motor de continua que mueve una cinta transportadora.
Línea de investigación o de trabajo: Electrónica de Potencia y Control Automático
 ASIGNATURA: TEORÍA DE SISTEMAS LINEALES Nombre de la asignatura: TEORÍA DE SISTEMAS LINEALES Línea de investigación o de trabajo: Electrónica de Potencia y Control Automático Tiempo de dedicación del estudiante
ASIGNATURA: TEORÍA DE SISTEMAS LINEALES Nombre de la asignatura: TEORÍA DE SISTEMAS LINEALES Línea de investigación o de trabajo: Electrónica de Potencia y Control Automático Tiempo de dedicación del estudiante
Nombre: Carné Ordinal. Parte I preguntas (1 punto c/u) Escriba la respuesta en el espacio indicado o encierre en un círculo la respuesta correcta:
 Escriba la respuesta en el espacio indicado o encierre en un círculo la respuesta correcta:") INSTITUTO TECNOLÓGICO DE COSTA RICA II SEMESTRE 2013 ESCUELA DE INGENIERIA EN ELECTRÓNICA CURSO: EL-5408 CONTROL AUTOMÁTICO MEDIO: Examen 3 PROF: ING. EDUARDO INTERIANO Nombre: Carné Ordinal Parte I preguntas
INSTITUTO TECNOLÓGICO DE COSTA RICA II SEMESTRE 2013 ESCUELA DE INGENIERIA EN ELECTRÓNICA CURSO: EL-5408 CONTROL AUTOMÁTICO MEDIO: Examen 3 PROF: ING. EDUARDO INTERIANO Nombre: Carné Ordinal Parte I preguntas
EJERCICIOS DE CONTROL POR COMPUTADOR BOLETIN V: SISTEMAS DISCRETOS (I)
") C. Determine el valor al que tenderá en régimen permanente la salida ante un escalón de amplitud 3 a la entrada del sistema discreto dado por: z.7 G( z) ( z.5) z C. a) Determinar la región del plano z
C. Determine el valor al que tenderá en régimen permanente la salida ante un escalón de amplitud 3 a la entrada del sistema discreto dado por: z.7 G( z) ( z.5) z C. a) Determinar la región del plano z
Representación en el espacio de estado. Sistemas Control Embebidos e Instrumentación Electrónica UNIVERSIDAD EAFIT
 Representación en el espacio de estado Representación en espacio de estado Control clásico El modelado y control de sistemas basado en la transformada de Laplace, es un enfoque muy sencillo y de fácil
Representación en el espacio de estado Representación en espacio de estado Control clásico El modelado y control de sistemas basado en la transformada de Laplace, es un enfoque muy sencillo y de fácil
8. Consideraciones estructurales en control SISO
 8 Consideraciones estructurales en control SISO Parte 3 Panorama de la clase: Control en cascada Introducción Ilustración sobre un ejemplo industrial Ejemplo de diseño en cascada Resumen del Capítulo CAUT1
8 Consideraciones estructurales en control SISO Parte 3 Panorama de la clase: Control en cascada Introducción Ilustración sobre un ejemplo industrial Ejemplo de diseño en cascada Resumen del Capítulo CAUT1
El controlador On-Off (si-no o todo y nada).
.") 1 Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Sistemas de Control Automático. Lugar de ejecución: Instrumentación y Control (Edificio 3, 2da planta). El controlador On-Off (si-no o todo y nada).
1 Facultad: Ingeniería. Escuela: Electrónica. Asignatura: Sistemas de Control Automático. Lugar de ejecución: Instrumentación y Control (Edificio 3, 2da planta). El controlador On-Off (si-no o todo y nada).
1. Modelos Matemáticos y Experimentales 1
 . Modelos Matemáticos y Experimentales. Modelos Matemáticos y Experimentales.. Definición.. Tipos de Procesos.3. Tipos de Modelos 3.4. Transformada de Laplace 4.5. Función de Transferencia 7.6. Función
. Modelos Matemáticos y Experimentales. Modelos Matemáticos y Experimentales.. Definición.. Tipos de Procesos.3. Tipos de Modelos 3.4. Transformada de Laplace 4.5. Función de Transferencia 7.6. Función
Lazos de control. Lazos de control. Ing. Leni Núñez
 Lazos de control Ing. Leni Núñez . Definición.. Elementos del lazo de control 3. Caracterización del proceso: Modelos dinámicos lineales.. Respuesta al impulso y función de transferencia.. Diagrama de
Lazos de control Ing. Leni Núñez . Definición.. Elementos del lazo de control 3. Caracterización del proceso: Modelos dinámicos lineales.. Respuesta al impulso y función de transferencia.. Diagrama de
Metodología de diseño de Sistemas de Control
 Metodología de diseño de Sistemas de Control Tema 2 1 Conocimiento del problema Explotación Definición de las especificaciones Test Metodología de diseño de Sistemas de Control...proceso iterativo Modelado
Metodología de diseño de Sistemas de Control Tema 2 1 Conocimiento del problema Explotación Definición de las especificaciones Test Metodología de diseño de Sistemas de Control...proceso iterativo Modelado
07 - Control Todo o Nada.doc 1
 1. Control Todo o Nada 1. Control Todo o Nada 1 1.1. Problema de control On-Off 2 1.2. Control en realimentación con ganancia elevada 2 1.3. Modelo para la habitación 3 1.4. Respuesta a Lazo Abierto 4
1. Control Todo o Nada 1. Control Todo o Nada 1 1.1. Problema de control On-Off 2 1.2. Control en realimentación con ganancia elevada 2 1.3. Modelo para la habitación 3 1.4. Respuesta a Lazo Abierto 4
DISEÑO REGULADORES EN LUGAR d. RAÍCES
 TEMA 9 DISEÑO REGULADORES EN LUGAR d. RAÍCES 9.- OBJETIVOS Conocida la forma de analizar la respuesta dinámica de los sistemas continuos, se pretende ahora abordar el problema de modificar dicha respuesta
TEMA 9 DISEÑO REGULADORES EN LUGAR d. RAÍCES 9.- OBJETIVOS Conocida la forma de analizar la respuesta dinámica de los sistemas continuos, se pretende ahora abordar el problema de modificar dicha respuesta
Control de un servomotor con respuesta subamortiguada
 Control de un servomotor con respuesta subamortiguada Objetivo: Implementar el control digital de la posición angular del servomotor CI-23004. Antecedentes y descripción del servo Para este laboratorio
Control de un servomotor con respuesta subamortiguada Objetivo: Implementar el control digital de la posición angular del servomotor CI-23004. Antecedentes y descripción del servo Para este laboratorio
CAPÍTULO. Análisis del Desempeño del Controlador GPI. IV. Análisis del Desempeño del Controlador GPI
 CAPÍTULO IV Análisis del Desempeño del Controlador GPI El interés de este capítulo radica en la compensación del voltaje de cd en presencia de perturbaciones. Este problema se presenta en aplicaciones
CAPÍTULO IV Análisis del Desempeño del Controlador GPI El interés de este capítulo radica en la compensación del voltaje de cd en presencia de perturbaciones. Este problema se presenta en aplicaciones
DEFINICIONES Y CONCEPTOS (SISTEMAS DE PERCEPCIÓN - DTE) Curso
 Curso") DEFINICIONES Y CONCEPTOS (SISTEMAS DE PERCEPCIÓN - DTE) Curso 2009-10 1. Generalidades Instrumentación: En general la instrumentación comprende todas las técnicas, equipos y metodología relacionados con
DEFINICIONES Y CONCEPTOS (SISTEMAS DE PERCEPCIÓN - DTE) Curso 2009-10 1. Generalidades Instrumentación: En general la instrumentación comprende todas las técnicas, equipos y metodología relacionados con
Circuitos de RF y las Comunicaciones Analógicas. Capítulo II: Circuitos resonantes y Redes de acople
 Capítulo II: Circuitos resonantes y Redes de acople 21 22 2. Circuitos Resonantes y Redes de Acople En este capítulo se estudiaran los circuitos resonantes desde el punto de vista del factor de calidad
Capítulo II: Circuitos resonantes y Redes de acople 21 22 2. Circuitos Resonantes y Redes de Acople En este capítulo se estudiaran los circuitos resonantes desde el punto de vista del factor de calidad
INDICE Capítulo 1. Variables del Circuito Eléctrico Capítulo 2. Elementos de Circuitos Capítulo 3. Circuitos Resistivos
 INDICE Capítulo 1. Variables del Circuito Eléctrico 1 Introducción 1 1.1. Reto de diseño: Controlador de una válvula para tobera 2 1.2. Albores de la ciencia eléctrica 2 1.3. Circuitos eléctricos y flujo
INDICE Capítulo 1. Variables del Circuito Eléctrico 1 Introducción 1 1.1. Reto de diseño: Controlador de una válvula para tobera 2 1.2. Albores de la ciencia eléctrica 2 1.3. Circuitos eléctricos y flujo
Control de Procesos Industriales 1. INTRODUCCIÓN
 Control de Procesos Industriales 1. INTRODUCCIÓN por Pascual Campoy Universidad Politécnica Madrid U.P.M.-DISAM P. Campoy Control de Procesos Industriales 1 Control de Procesos Industriales: Introducción
Control de Procesos Industriales 1. INTRODUCCIÓN por Pascual Campoy Universidad Politécnica Madrid U.P.M.-DISAM P. Campoy Control de Procesos Industriales 1 Control de Procesos Industriales: Introducción
1. Diseño de un compensador de adelanto de fase
 COMPENSADORES DE ADELANTO Y RETARDO 1 1. Diseño de un compensador de adelanto de fase El compensador de adelanto de fase persigue el aumento del margen de fase mediante la superposición de la curva de
COMPENSADORES DE ADELANTO Y RETARDO 1 1. Diseño de un compensador de adelanto de fase El compensador de adelanto de fase persigue el aumento del margen de fase mediante la superposición de la curva de
ECUACIÓN DE OSCILACIONES. Tomado del texto de Ecuaciones Diferenciales de los Profesores. Norman Mercado. Luis Ignacio Ordoñéz
 ECUACIÓN DE OSCILACIONES Tomado del texto de Ecuaciones Diferenciales de los Profesores Norman Mercado Luis Ignacio Ordoñéz Muchos de los sistemas de ingeniería están regidos por una ecuación diferencial
ECUACIÓN DE OSCILACIONES Tomado del texto de Ecuaciones Diferenciales de los Profesores Norman Mercado Luis Ignacio Ordoñéz Muchos de los sistemas de ingeniería están regidos por una ecuación diferencial
EL42A - Circuitos Electrónicos Clase No. 5: Circuitos Limitadores y Otras Aplicaciones
 EL42A - Circuitos Electrónicos Clase No. 5: Circuitos Limitadores y Otras Aplicaciones Patricio Parada pparada@ing.uchile.cl Departamento de Ingeniería Eléctrica Universidad de Chile 13 de Agosto de 2009
EL42A - Circuitos Electrónicos Clase No. 5: Circuitos Limitadores y Otras Aplicaciones Patricio Parada pparada@ing.uchile.cl Departamento de Ingeniería Eléctrica Universidad de Chile 13 de Agosto de 2009
MT 227C: Clase Introducción n a la realimentación n y control
 MT 227C: Clase 01-01 Introducción n a la realimentación n y control Elizabeth Villota Cerna 08 Abril 2009 Objetivos Proveer información general acerca de MT 227 - describir la estructura del curso, método
MT 227C: Clase 01-01 Introducción n a la realimentación n y control Elizabeth Villota Cerna 08 Abril 2009 Objetivos Proveer información general acerca de MT 227 - describir la estructura del curso, método
Controladores PID. Virginia Mazzone. Regulador centrífugo de Watt
 Controladores PID Virginia Mazzone Regulador centrífugo de Watt Control Automático 1 http://iaci.unq.edu.ar/caut1 Automatización y Control Industrial Universidad Nacional de Quilmes Marzo 2002 Controladores
Controladores PID Virginia Mazzone Regulador centrífugo de Watt Control Automático 1 http://iaci.unq.edu.ar/caut1 Automatización y Control Industrial Universidad Nacional de Quilmes Marzo 2002 Controladores
Glosario de Términos de Control
 Glosario de Términos de Control Unifiquemos términos a fin de utilizar un lenguaje común en este aspecto de la tecnología. Siempre teniendo en cuenta que nuestro objeto de estudio serán los sistemas de
Glosario de Términos de Control Unifiquemos términos a fin de utilizar un lenguaje común en este aspecto de la tecnología. Siempre teniendo en cuenta que nuestro objeto de estudio serán los sistemas de
OBJETIVOS. Proveer información general acerca de MT describir la estructura del curso, método de evaluación, aspectos
 MT 227C: Clase 01-01 Introducción a la realimentación y control ELIZABETH VILLOTA CERNA 02 SEPTIEMBRE 2009 OBJETIVOS Proveer información general acerca de MT 227 - describir la estructura del curso, método
MT 227C: Clase 01-01 Introducción a la realimentación y control ELIZABETH VILLOTA CERNA 02 SEPTIEMBRE 2009 OBJETIVOS Proveer información general acerca de MT 227 - describir la estructura del curso, método
UNIVERSIDAD VERACRUZANA FACULTAD DE INGENIERÍA MECÁNICA ELÉCTRICA
 UNIVERSIDAD VERACRUZANA FACULTAD DE INGENIERÍA MECÁNICA ELÉCTRICA ANÁLISIS DE LA ESTABILIDAD DE UN SERVOMOTOR UTILIZANDO EL DISEÑO DE UN COMPENSADOR DE RETARDO- ADELANTO TESIS Que para obtener el título
UNIVERSIDAD VERACRUZANA FACULTAD DE INGENIERÍA MECÁNICA ELÉCTRICA ANÁLISIS DE LA ESTABILIDAD DE UN SERVOMOTOR UTILIZANDO EL DISEÑO DE UN COMPENSADOR DE RETARDO- ADELANTO TESIS Que para obtener el título
Capítulo 4. (Respuesta Natural de circuitos RL y RC) Circuitos RL y RC sin fuentes conectadas para t>0
 Circuitos RL y RC sin fuentes conectadas para t>0") Capítulo 4 (Respuesta Natural de circuitos R y RC) Circuitos R y RC sin fuentes conectadas para t>0 En este capítulo se analizan circuitos Resistivos-inductivos (R-) y circuitos resistivos-capacitivos
Capítulo 4 (Respuesta Natural de circuitos R y RC) Circuitos R y RC sin fuentes conectadas para t>0 En este capítulo se analizan circuitos Resistivos-inductivos (R-) y circuitos resistivos-capacitivos
Diseño de sistemas de control. Teoría de control
 Diseño de sistemas de control Teoría de control Introducción Para iniciar el proceso de diseño de un sistema de control, es necesario realizar los siguientes pasos:... Determine que debe hacer el sistema
Diseño de sistemas de control Teoría de control Introducción Para iniciar el proceso de diseño de un sistema de control, es necesario realizar los siguientes pasos:... Determine que debe hacer el sistema
de diseño CAPÍTULO 4. Métodos de análisis de los circuitos resistivos 4.1. Reto de diseño: Indicación del ángulo de un potenciómetro 4.2. Circuitos el
 CAPÍTULO 1. VARIABLES DEL CIRCUITO ELÉCTRICO 1.1. Reto de diseño: Controlador de una válvula para tobera 1.2. Albores de la ciencia eléctrica 1.3. Circuitos eléctricos y flujo de corriente 1.4. Sistemas
CAPÍTULO 1. VARIABLES DEL CIRCUITO ELÉCTRICO 1.1. Reto de diseño: Controlador de una válvula para tobera 1.2. Albores de la ciencia eléctrica 1.3. Circuitos eléctricos y flujo de corriente 1.4. Sistemas
19. DISEÑO DE CONTROLADORES
 381 19. DISEÑO DE CONTROLADORES 19.1. INTRODUCCION Con los diagramas de Bode de la respuesta de un lazo abierto se pueden diseñar controladores con las especificaciones del margen de ganancia, el margen
381 19. DISEÑO DE CONTROLADORES 19.1. INTRODUCCION Con los diagramas de Bode de la respuesta de un lazo abierto se pueden diseñar controladores con las especificaciones del margen de ganancia, el margen
DENOMINACIÓN ASIGNATURA: SISTEMAS ELECTRÓNICOS GRADO: INGENIERIA BIOMEDICA CURSO: 4º CUATRIMESTRE: 1º
 DENOMINACIÓN ASIGNATURA: SISTEMAS ELECTRÓNICOS GRADO: INGENIERIA BIOMEDICA CURSO: 4º CUATRIMESTRE: 1º La asignatura tiene 29 sesiones que se distribuyen a lo largo de 14 semanas. Los laboratorios pueden
DENOMINACIÓN ASIGNATURA: SISTEMAS ELECTRÓNICOS GRADO: INGENIERIA BIOMEDICA CURSO: 4º CUATRIMESTRE: 1º La asignatura tiene 29 sesiones que se distribuyen a lo largo de 14 semanas. Los laboratorios pueden
CAPITULO XIII RECTIFICADORES CON FILTROS
 CAPITULO XIII RECTIFICADORES CON FILTROS 13.1 INTRODUCCION En este Capítulo vamos a centrar nuestra atención en uno de los circuitos más importantes para el funcionamiento de los sistemas electrónicos:
CAPITULO XIII RECTIFICADORES CON FILTROS 13.1 INTRODUCCION En este Capítulo vamos a centrar nuestra atención en uno de los circuitos más importantes para el funcionamiento de los sistemas electrónicos:
Tema 2.5: Análisis basado en el método del Lugar de las Raíces
 Tema 2.5: Análisis basado en el método del Lugar de las Raíces 1. Lugar de las Raíces 2. Trazado de la gráfica 3. Lugar de las raíces generalizado 4. Diseño de controladores 1. El lugar de las raíces Objetivo:
Tema 2.5: Análisis basado en el método del Lugar de las Raíces 1. Lugar de las Raíces 2. Trazado de la gráfica 3. Lugar de las raíces generalizado 4. Diseño de controladores 1. El lugar de las raíces Objetivo:
Control de Velocidad de un Servomotor con el Procesador Digital de Señales TMS320LF2407 y VisSim
 ENINV IE 2005 Encuentro de Investigación en Ingeniería Eléctrica Zacatecas, Zac, Marzo 17 18, 2005 Control de Velocidad de un Servomotor con el Procesador Digital de Señales TMS320LF2407 y VisSim Aurelio
ENINV IE 2005 Encuentro de Investigación en Ingeniería Eléctrica Zacatecas, Zac, Marzo 17 18, 2005 Control de Velocidad de un Servomotor con el Procesador Digital de Señales TMS320LF2407 y VisSim Aurelio
Tema 6. Diseño de controladores discretos
 Ingeniería de Control Tema 6. Diseño de controladores discretos Daniel Rodríguez Ramírez Teodoro Alamo Cantarero Contextualización del tema Conocimientos que se adquieren en este tema: Como obtener el
Ingeniería de Control Tema 6. Diseño de controladores discretos Daniel Rodríguez Ramírez Teodoro Alamo Cantarero Contextualización del tema Conocimientos que se adquieren en este tema: Como obtener el
PRÁCTICA 4: RESPUESTA EN FRECUENCIA Y COMPENSACION P P T T T. 1.-Objetivos.
 PRÁCTICA 4: RESPUESTA E FRECUECIA Y COMPESACIO 1.-Objetivos. P P P P Medir y conocer la respuesta en frecuencia de los amplificadores. Medir correctamente la ganancia de tensión de un amplificador, en
PRÁCTICA 4: RESPUESTA E FRECUECIA Y COMPESACIO 1.-Objetivos. P P P P Medir y conocer la respuesta en frecuencia de los amplificadores. Medir correctamente la ganancia de tensión de un amplificador, en
CURSO: CONTROL AUTOMATICO PROFESOR: MSC. CESAR LOPEZ AGUILAR
 SEMANA 10 CURSO: CONTROL AUTOMATICO PROFESOR: MSC. CESAR LOPEZ AGUILAR TRANSFORMADA DE LA PLACE I. OBJETIVO Solucionar ecuaciones diferenciales mediante la transformada de la place. III. BIBLIOGRAFIA W.
SEMANA 10 CURSO: CONTROL AUTOMATICO PROFESOR: MSC. CESAR LOPEZ AGUILAR TRANSFORMADA DE LA PLACE I. OBJETIVO Solucionar ecuaciones diferenciales mediante la transformada de la place. III. BIBLIOGRAFIA W.
Ajuste empírico de reguladores PID en cadena cerrada con Matlab
 Ajuste empírico de reguladores PID en cadena cerrada con Matlab JOSÉ LUIS CALVO ROLLE, ÁNGEL ALONSO ÁLVAREZ, RAMÓN FERREIRO GARCÍA Y ISAÍAS GARCÍA RODRÍGUEZ La obtención de los parámetros de un regulador
Ajuste empírico de reguladores PID en cadena cerrada con Matlab JOSÉ LUIS CALVO ROLLE, ÁNGEL ALONSO ÁLVAREZ, RAMÓN FERREIRO GARCÍA Y ISAÍAS GARCÍA RODRÍGUEZ La obtención de los parámetros de un regulador
INDICE 1 Introducción 2 Circuitos resistivos 3 Fuentes dependientes y amplificadores operacionales (OP AMPS) 4 Métodos de análisis
 4 Métodos de análisis") INDICE 1 Introducción 1 1.1. Definiciones y unidades 2 1.2. Carga y corriente 5 1.3. Voltaje, energía y potencia 9 1.4. Elementos activos y pasivos 12 1.5. Análisis de circuitos y diseño 15 16 Problemas
INDICE 1 Introducción 1 1.1. Definiciones y unidades 2 1.2. Carga y corriente 5 1.3. Voltaje, energía y potencia 9 1.4. Elementos activos y pasivos 12 1.5. Análisis de circuitos y diseño 15 16 Problemas
Introducción a la Robótica Mecanismos para el control de un robot (5)
") Introducción a la Robótica Mecanismos para el control de un robot (5) Dr Jose M. Carranza carranza@inaoep.mx Coordinación de Ciencias Computacionales, INAOE 3er. Torneo Mexicano de Robots Limpiadores:
Introducción a la Robótica Mecanismos para el control de un robot (5) Dr Jose M. Carranza carranza@inaoep.mx Coordinación de Ciencias Computacionales, INAOE 3er. Torneo Mexicano de Robots Limpiadores:
Contenidos Control y Automatización
 Tema 2: Modelos Matemáticos Susana Borromeo Juan Antonio Hernández Tamames Curso 2014-2015 Contenidos 1. Conceptos básicos. 2. Modelado matemático de sistemas Físicos. Linealización. Función de Transferencia
Tema 2: Modelos Matemáticos Susana Borromeo Juan Antonio Hernández Tamames Curso 2014-2015 Contenidos 1. Conceptos básicos. 2. Modelado matemático de sistemas Físicos. Linealización. Función de Transferencia
CIRCUITOS y SISTEMAS I
 CIRCUITOS y SISTEMAS I I II - III LEYES IV - V MÉTODOS VI ANÁLISIS TEMPORAL INTRODUCCIÓN componentes + general conexiones simplificativos VII asociaciones ANÁLISIS FRECUENCIAL 4,5 horas (4,5 + 4) horas
CIRCUITOS y SISTEMAS I I II - III LEYES IV - V MÉTODOS VI ANÁLISIS TEMPORAL INTRODUCCIÓN componentes + general conexiones simplificativos VII asociaciones ANÁLISIS FRECUENCIAL 4,5 horas (4,5 + 4) horas
PR 7. Práctica con Matlab
 PR 7. Práctica con Matlab Control PID Realizado: Laboratorio Remoto de Automática (LRA-ULE) Versión: Páginas: Grupo SUPPRESS (Supervisión, Control y Automatización) Universidad de León http://lra.unileon.es
PR 7. Práctica con Matlab Control PID Realizado: Laboratorio Remoto de Automática (LRA-ULE) Versión: Páginas: Grupo SUPPRESS (Supervisión, Control y Automatización) Universidad de León http://lra.unileon.es
Calibración de sistemas de medición Cloro Libre Memosens - Liquiline
 Productos Soluciones Servicios Calibración de sistemas de medición Cloro Libre Memosens - Liquiline 26-11-2013 (DRAFT) Alcance El presente documento se enmarca en los programas de capacitación y entrenamiento
Productos Soluciones Servicios Calibración de sistemas de medición Cloro Libre Memosens - Liquiline 26-11-2013 (DRAFT) Alcance El presente documento se enmarca en los programas de capacitación y entrenamiento
CONTROLADORES SISTEMAS DE CONTROL. Introducción. Acciones básicas de control
 SISTEMAS DE CONTROL CONTROLADORES Introducción Un controlador es un dispositivo capaz de corregir desviaciones producidas en la variable de salida de un sistema, como consecuencia de perturbaciones internas
SISTEMAS DE CONTROL CONTROLADORES Introducción Un controlador es un dispositivo capaz de corregir desviaciones producidas en la variable de salida de un sistema, como consecuencia de perturbaciones internas
INDICE Capitulo 1. Variables del Circuito Eléctrico Capitulo 2. Elementos del Circuito Capitulo 3. Circuitos Resistivos
 INDICE Capitulo 1. Variables del Circuito Eléctrico 1 1.1. Albores de la ciencia eléctrica 2 1.2. Circuitos eléctricos y flujo de corriente 10 1.3. Sistemas de unidades 16 1.4. Voltaje 18 1.5. Potencia
INDICE Capitulo 1. Variables del Circuito Eléctrico 1 1.1. Albores de la ciencia eléctrica 2 1.2. Circuitos eléctricos y flujo de corriente 10 1.3. Sistemas de unidades 16 1.4. Voltaje 18 1.5. Potencia
DINÁMICA ESTRUCTURAL. Diagramas de bloques
 DINÁMICA ESTRUCTURAL Diagramas de bloques QUÉ ES UN DIAGRAMA DE BLOQUES? Definición de diagrama de bloques: Es una representación gráfica de las funciones que lleva a cabo cada componente y el flujo de
DINÁMICA ESTRUCTURAL Diagramas de bloques QUÉ ES UN DIAGRAMA DE BLOQUES? Definición de diagrama de bloques: Es una representación gráfica de las funciones que lleva a cabo cada componente y el flujo de
Funcionamiento del circuito integrado LM 317
 1 1) Concepto de realimentación Funcionamiento del circuito integrado LM 317 En muchas circunstancias es necesario que un sistema trate de mantener alguna magnitud constante por sí mismo. Por ejemplo el
1 1) Concepto de realimentación Funcionamiento del circuito integrado LM 317 En muchas circunstancias es necesario que un sistema trate de mantener alguna magnitud constante por sí mismo. Por ejemplo el
5 Estabilidad de soluciones de equilibrio
 Prácticas de Ecuaciones Diferenciales G. Aguilar, N. Boal, C. Clavero, F. Gaspar Estabilidad de soluciones de equilibrio Objetivos: Clasificar y analizar los puntos de equilibrio que aparecen en los sistemas
Prácticas de Ecuaciones Diferenciales G. Aguilar, N. Boal, C. Clavero, F. Gaspar Estabilidad de soluciones de equilibrio Objetivos: Clasificar y analizar los puntos de equilibrio que aparecen en los sistemas
CONTROL DE VELOCIDAD DE UN MOTOR DC, USANDO FILTROS DE KALMAN EN TIEMPO CONTINUO
 CONTROL DE VELOCIDAD DE UN MOTOR DC, USANDO FILTROS DE KALMAN EN TIEMPO CONTINUO Julio C Mansilla Hernández (1); Julio N. García Silverio (2); Francisco J. Arteaga (3) (1) ELEOCCIDENTE, Dpto. de Planificación
CONTROL DE VELOCIDAD DE UN MOTOR DC, USANDO FILTROS DE KALMAN EN TIEMPO CONTINUO Julio C Mansilla Hernández (1); Julio N. García Silverio (2); Francisco J. Arteaga (3) (1) ELEOCCIDENTE, Dpto. de Planificación
EXAMEN PARCIAL I
 UNIVERSIDAD NACIONAL DE INGENIERÍA - FIM MT 7 Control Moderno y Óptimo EXAMEN PARCIAL - 04I Problema : Un tanque vacio con masa m o es posicionado sobre g un resorte lineal con rigidez k. El tanque es
UNIVERSIDAD NACIONAL DE INGENIERÍA - FIM MT 7 Control Moderno y Óptimo EXAMEN PARCIAL - 04I Problema : Un tanque vacio con masa m o es posicionado sobre g un resorte lineal con rigidez k. El tanque es
Universidad nacional de ingeniería. Recinto universitario Pedro Arauz palacios. Facultad de tecnología de la industria. Ingeniería mecánica
 Universidad nacional de ingeniería Recinto universitario Pedro Arauz palacios Facultad de tecnología de la industria Ingeniería mecánica DEPARTAMENTO DE energética REFRIGERACIÓN Y AIRE ACONDICIONADO Tema:
Universidad nacional de ingeniería Recinto universitario Pedro Arauz palacios Facultad de tecnología de la industria Ingeniería mecánica DEPARTAMENTO DE energética REFRIGERACIÓN Y AIRE ACONDICIONADO Tema:
Optimización de señal de control en reguladores PID con arquitectura antireset Wind-Up
 Optimización de señal de control en reguladores PID con arquitectura antireset Wind-Up Control signal optimization for PID regulators based on a Wind-Up anti-reset architecture Ingeniero electrónico, magíster
Optimización de señal de control en reguladores PID con arquitectura antireset Wind-Up Control signal optimization for PID regulators based on a Wind-Up anti-reset architecture Ingeniero electrónico, magíster
6. Análisis en el dominio de la frecuencia. Teoría de Control
 6. Análisis en el dominio de la frecuencia Teoría de Control Introducción El término respuesta en frecuencia, indica la respuesta en estado estacionario de un sistema a una entrada senoidal. La respuesta
6. Análisis en el dominio de la frecuencia Teoría de Control Introducción El término respuesta en frecuencia, indica la respuesta en estado estacionario de un sistema a una entrada senoidal. La respuesta
Contenido. Capítulo 2 Semiconductores 26
 ROMANOS_MALVINO.qxd 20/12/2006 14:40 PÆgina vi Prefacio xi Capítulo 1 Introducción 2 1.1 Las tres clases de fórmulas 1.5 Teorema de Thevenin 1.2 Aproximaciones 1.6 Teorema de Norton 1.3 Fuentes de tensión
ROMANOS_MALVINO.qxd 20/12/2006 14:40 PÆgina vi Prefacio xi Capítulo 1 Introducción 2 1.1 Las tres clases de fórmulas 1.5 Teorema de Thevenin 1.2 Aproximaciones 1.6 Teorema de Norton 1.3 Fuentes de tensión
Problemas Tema 6. Figura 6.3
 Problemas Tema 6 6.1. Se conecta una fuente de voltaje V s =1mV y resistencia interna R s =1MΩ a los terminales de entrada de un amplificador con una ganancia de voltaje en circuito abierto A v0 =10 4,
Problemas Tema 6 6.1. Se conecta una fuente de voltaje V s =1mV y resistencia interna R s =1MΩ a los terminales de entrada de un amplificador con una ganancia de voltaje en circuito abierto A v0 =10 4,
CIRCUITOS ELÉCTRICOS. Temas:
 CIRCUITOS ELÉCTRICOS Temas: - Conceptos generales de circuitos eléctricos, ley de Ohm y de Kirchhoff. - Energía almacenada en bobinas y capacitores. - Teoremas de redes: Thevenin, Norton, superposición,
CIRCUITOS ELÉCTRICOS Temas: - Conceptos generales de circuitos eléctricos, ley de Ohm y de Kirchhoff. - Energía almacenada en bobinas y capacitores. - Teoremas de redes: Thevenin, Norton, superposición,
3.1 DIAGRAMA A BLOQUES DE SISTEMAS DE CONTROL
 3.1 DIAGRAMA A BLOQUES DE SISTEMAS DE CONTROL 3.1.1 DIAGRAMAS DE BLOQUES: FUNDAMENTOS Un diagrama de bloques es una representación gráfica y abreviada de la relación de causa y efecto entre la entrada
3.1 DIAGRAMA A BLOQUES DE SISTEMAS DE CONTROL 3.1.1 DIAGRAMAS DE BLOQUES: FUNDAMENTOS Un diagrama de bloques es una representación gráfica y abreviada de la relación de causa y efecto entre la entrada
CONTROLADOR DE TEMPERATURA Y HUMEDAD F Manual del usuario
 Fecha edición 02/2015 N Versión 01 CONTROLADOR DE TEMPERATURA Y HUMEDAD F1220235 Manual del usuario 1 1. Información general funcional Aplicado en control de aplicaciones de temperatura y humedad, control
Fecha edición 02/2015 N Versión 01 CONTROLADOR DE TEMPERATURA Y HUMEDAD F1220235 Manual del usuario 1 1. Información general funcional Aplicado en control de aplicaciones de temperatura y humedad, control
Técnicas Avanzadas de Control Memoria de ejercicios
 Memoria de ejercicios Curso: 2007/08 Titulación: Ingeniero Técnico Industrial Especialidad: Electrónica Industrial Alumno: Adolfo Hilario Tutor: Adolfo Hilario Caballero Índice general Presentación. 2..
Memoria de ejercicios Curso: 2007/08 Titulación: Ingeniero Técnico Industrial Especialidad: Electrónica Industrial Alumno: Adolfo Hilario Tutor: Adolfo Hilario Caballero Índice general Presentación. 2..
Sistemas de Control UTN-FRBA/FRH Consideraciones para el análisis y
 I. Introducción. En estas, consideraciones para el análisis y diseño de sistemas de control, continuos y LTI, se tienen en cuenta algunas de las relaciones matemáticas y conceptuales, que se requieren,
I. Introducción. En estas, consideraciones para el análisis y diseño de sistemas de control, continuos y LTI, se tienen en cuenta algunas de las relaciones matemáticas y conceptuales, que se requieren,
UNIVERSIDAD DE ANTIOQUIA FACULTAD DE INGENIERÍA DEPARTAMENTO DE INGENIERIA ELECTRÓNICA LABORATORIO DE CIRCUITOS II PRÁCTICA N 5 "GENERADORES DE SEÑAL"
 UNIVERSIDAD DE ANTIOQUIA FACULTAD DE INGENIERÍA DEPARTAMENTO DE INGENIERIA ELECTRÓNICA LABORATORIO DE CIRCUITOS II PRÁCTICA N 5 "GENERADORES DE SEÑAL" OBJETIVOS: Conocer el funcionamiento de circuitos
UNIVERSIDAD DE ANTIOQUIA FACULTAD DE INGENIERÍA DEPARTAMENTO DE INGENIERIA ELECTRÓNICA LABORATORIO DE CIRCUITOS II PRÁCTICA N 5 "GENERADORES DE SEÑAL" OBJETIVOS: Conocer el funcionamiento de circuitos
Unidad 3. Técnicas de Modulación
 Unidad 3. 3.1 Modulación de Onda Continua. 3.2 Modulación por Pulsos. 1 Antes de transmitir una señal con información a través de un canal de comunicación se aplica algun tipo de modulación. Esta operación
Unidad 3. 3.1 Modulación de Onda Continua. 3.2 Modulación por Pulsos. 1 Antes de transmitir una señal con información a través de un canal de comunicación se aplica algun tipo de modulación. Esta operación
CONTROLADOR PID. Jorge Luis Mírez Tarrillo. Ing Mecánio Electricista Maestro en Ciencias mención Física
 CONTROLADOR PID Jorge Luis Mírez Tarrillo Ing Mecánio Electricista Maestro en Ciencias mención Física Es una estructura de control que es casi universalmente utilizada en la industria. Se trata de la familia
CONTROLADOR PID Jorge Luis Mírez Tarrillo Ing Mecánio Electricista Maestro en Ciencias mención Física Es una estructura de control que es casi universalmente utilizada en la industria. Se trata de la familia
PRÁCTICAS VÍA INTERNET Maqueta industrial de 4 tanques. Manejo de la Interfaz
 PRÁCTICAS VÍA INTERNET Maqueta industrial de 4 tanques Manejo de la Interfaz Realizado: Laboratorio Remoto de Automática (LRA-ULE) Versión: Páginas: Grupo SUPPRESS (Supervisión, Control y Automatización)
PRÁCTICAS VÍA INTERNET Maqueta industrial de 4 tanques Manejo de la Interfaz Realizado: Laboratorio Remoto de Automática (LRA-ULE) Versión: Páginas: Grupo SUPPRESS (Supervisión, Control y Automatización)
1 Análisis de la Respuesta Temporal
 Análisis de la Respuesta Temporal El estudio de la respuesta temporal de un sistema es de vital importancia para el posterior análisis de su comportamiento y el posible diseño de un sistema de control.
Análisis de la Respuesta Temporal El estudio de la respuesta temporal de un sistema es de vital importancia para el posterior análisis de su comportamiento y el posible diseño de un sistema de control.
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
 PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ FACULTAD DE CIENCIAS E INGENIERÍA ANEXOS DISEÑO DEL SUBSISTEMA MECÁNICO - ELÉCTRICO PARA UN SISTEMA DE CONTROL DE TEMPERATURA DE UN TANQUE Tesis para optar el Título
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ FACULTAD DE CIENCIAS E INGENIERÍA ANEXOS DISEÑO DEL SUBSISTEMA MECÁNICO - ELÉCTRICO PARA UN SISTEMA DE CONTROL DE TEMPERATURA DE UN TANQUE Tesis para optar el Título
RESUMEN Nº1: CONTROL EN CASCADA.
 RESUMEN Nº1: CONTROL EN CASCADA. En éste informe se tiene como objetivo presentar una de las técnicas que se han desarrollado, y frecuentemente utilizado, con el fin de mejorar el desempeño del control
RESUMEN Nº1: CONTROL EN CASCADA. En éste informe se tiene como objetivo presentar una de las técnicas que se han desarrollado, y frecuentemente utilizado, con el fin de mejorar el desempeño del control
Marco Antonio Andrade Barrera 1 Diciembre de 2015
 Diseño, simulación, construcción, medición y ajuste de un filtro pasa-bajas activo de segundo orden con coeficientes de Bessel, configuración Sallen-Key, ganancia unitaria y una frecuencia de corte f c
Diseño, simulación, construcción, medición y ajuste de un filtro pasa-bajas activo de segundo orden con coeficientes de Bessel, configuración Sallen-Key, ganancia unitaria y una frecuencia de corte f c
Estabilidad en el dominio de la frecuencia Márgenes de estabilidad. Elizabeth Villota
 Estabilidad en el dominio de la frecuencia Márgenes de estabilidad Elizabeth Villota 1 Función de transferencia de lazo Función de transferencia de lazo: 2 Función en lazo cerrado: 2 Diagrama de Nyquist
Estabilidad en el dominio de la frecuencia Márgenes de estabilidad Elizabeth Villota 1 Función de transferencia de lazo Función de transferencia de lazo: 2 Función en lazo cerrado: 2 Diagrama de Nyquist
Departamento de Tecnología Villargordo. Componentes del grupo Nº : CURSO
 Departamento de Tecnología Villargordo Componentes del grupo Nº : - - CURSO DETECTORES ELECTRÓNICOS Para estos montajes se usará el circuito integrado BC 879, este es un circuito que incluye dos transistores
Departamento de Tecnología Villargordo Componentes del grupo Nº : - - CURSO DETECTORES ELECTRÓNICOS Para estos montajes se usará el circuito integrado BC 879, este es un circuito que incluye dos transistores
4.3 Problemas de aplicación 349
 4. Problemas de aplicación 49 4. Problemas de aplicación Ejemplo 4.. Circuito Eléctrico. En la figura 4.., se muestra un circuito Eléctrico de mallas en el cual se manejan corrientes, una en cada malla.
4. Problemas de aplicación 49 4. Problemas de aplicación Ejemplo 4.. Circuito Eléctrico. En la figura 4.., se muestra un circuito Eléctrico de mallas en el cual se manejan corrientes, una en cada malla.
DESCRIPCIÓN CARACTERÍSTICAS
 www.lazodecontrol.com DESCRIPCIÓN El controlador de temperatura PID + Lógica Difusa basado en microprocesador incorpora una pantalla LED de 4 dígitos brillante y de fácil lectura, donde se indican los
www.lazodecontrol.com DESCRIPCIÓN El controlador de temperatura PID + Lógica Difusa basado en microprocesador incorpora una pantalla LED de 4 dígitos brillante y de fácil lectura, donde se indican los
LABORATORIO DE ELECTROMAGNETISMO SUPERFICIES EQUIPOTENCIALES
 No 3 LABORATORIO DE ELECTROMAGNETISMO DEPARTAMENTO DE FISICA Y GEOLOGIA UNIVERSIDAD DE PAMPLONA FACULTAD DE CIENCIAS BÁSICAS Objetivos 1. Dibujar líneas de campo a través del mapeo de líneas equipotenciales.
No 3 LABORATORIO DE ELECTROMAGNETISMO DEPARTAMENTO DE FISICA Y GEOLOGIA UNIVERSIDAD DE PAMPLONA FACULTAD DE CIENCIAS BÁSICAS Objetivos 1. Dibujar líneas de campo a través del mapeo de líneas equipotenciales.
DESIGN AND IMPLEMENTATION OF A SPEED AND POSITION CONTROLLER FOR A CONVEYOR BELT APPLYING FUZZY LOGIC AND DIGITAL TECHNIQUES
 DESIGN AND IMPLEMENTATION OF A SPEED AND POSITION CONTROLLER FOR A CONVEYOR BELT APPLYING FUZZY LOGIC AND DIGITAL TECHNIQUES DISEÑO E IMPLEMENTACION DE UN CONTROLADOR DE VELOCIDAD Y POSICION PARA UNA BANDA
DESIGN AND IMPLEMENTATION OF A SPEED AND POSITION CONTROLLER FOR A CONVEYOR BELT APPLYING FUZZY LOGIC AND DIGITAL TECHNIQUES DISEÑO E IMPLEMENTACION DE UN CONTROLADOR DE VELOCIDAD Y POSICION PARA UNA BANDA
Dinámica y Control de Procesos Repartido 5
 Dinámica y Control de Procesos Repartido 5 5.1 El horno mostrado en la figura se utiliza para calentar el aire que se suministra a un regenerador catalítico. El transmisor de temperatura se calibra a 300-500
Dinámica y Control de Procesos Repartido 5 5.1 El horno mostrado en la figura se utiliza para calentar el aire que se suministra a un regenerador catalítico. El transmisor de temperatura se calibra a 300-500
Propiedades de los Sistemas Lineales e Invariantes en el Tiempo
 Propiedades de los Sistemas Lineales e Invariantes en el Tiempo La respuesta al impulso de un sistema LTIC (h(t)), representa una descripción completa de las características del sistema. Es decir la caracterización
Propiedades de los Sistemas Lineales e Invariantes en el Tiempo La respuesta al impulso de un sistema LTIC (h(t)), representa una descripción completa de las características del sistema. Es decir la caracterización
3.2 Respuesta temporal de los sistemas lineales de segundo orden de tiempo continuo sin ceros
 38 Capítulo 3. Respuesta temporal 3.2 Respuesta temporal de los sistemas lineales de segundo orden de tiempo continuo sin ceros Herramienta interactiva: 3.2. t_segundo_orden Conceptos analizados en la
38 Capítulo 3. Respuesta temporal 3.2 Respuesta temporal de los sistemas lineales de segundo orden de tiempo continuo sin ceros Herramienta interactiva: 3.2. t_segundo_orden Conceptos analizados en la
Figura 1. Circuito RLC
 APLIAIÓN: EL IRUITO RL. Al comienzo del tema de las E.D.O lineales de segundo orden hemos visto como estas ecuaciones sirven para modelizar distintos sitemas físicos. En concreto el circuito RL. Figura
APLIAIÓN: EL IRUITO RL. Al comienzo del tema de las E.D.O lineales de segundo orden hemos visto como estas ecuaciones sirven para modelizar distintos sitemas físicos. En concreto el circuito RL. Figura
Instalación y mantenimiento de cualquier red eléctrica.
 Soluciones 1 Soporte Eléctrico Instalación y mantenimiento de cualquier red eléctrica. Desarrollamos proyectos llave en mano enfocados a la Calidad y Eficiencia en el consumo. Transformadores. Subestaciones.
Soluciones 1 Soporte Eléctrico Instalación y mantenimiento de cualquier red eléctrica. Desarrollamos proyectos llave en mano enfocados a la Calidad y Eficiencia en el consumo. Transformadores. Subestaciones.
Por favor lea atentamente el siguiente manual de instrucciones antes de energizar el equipo.
 Controladores MTA Por favor lea atentamente el siguiente manual de instrucciones antes de energizar el equipo. 1. Especificaciones Alimentación: 85~265VAC 50/60HZ, 24VDC o 24VAC (Opcional) Entradas: Termocuplas
Controladores MTA Por favor lea atentamente el siguiente manual de instrucciones antes de energizar el equipo. 1. Especificaciones Alimentación: 85~265VAC 50/60HZ, 24VDC o 24VAC (Opcional) Entradas: Termocuplas
Implementación de un Convertidor CA-CD y PID Digital para un Motor CD
 Implementación de un Convertidor CA-CD y PID Digital para un Motor CD D.U. Campos-Delgado (1), G. Gallegos Garrido (1), S. Martínez Martínez (2) e I. Campos Cantón (1) (1) Facultad de Ciencias, UASLP,
Implementación de un Convertidor CA-CD y PID Digital para un Motor CD D.U. Campos-Delgado (1), G. Gallegos Garrido (1), S. Martínez Martínez (2) e I. Campos Cantón (1) (1) Facultad de Ciencias, UASLP,
CIRCUITO DE AYUDA A LA CONMUTACIÓN DE TRANSISTORES
 CIRCUITO DE AYUDA A LA CONMUTACIÓN DE TRANSISTORES Las redes de ayuda a la conmutación sirven para proteger a los transistores mediante la mejora de su trayectoria de conmutación. Hay tres tipos básicos
CIRCUITO DE AYUDA A LA CONMUTACIÓN DE TRANSISTORES Las redes de ayuda a la conmutación sirven para proteger a los transistores mediante la mejora de su trayectoria de conmutación. Hay tres tipos básicos
CAPÍTULO 4: RESULTADOS
 CAPÍTULO 4: RESULTADOS En la mayoría de los resultados de medición se utilizó una herramienta del osciloscopio que permite realizar varias mediciones y hace cálculos estadísticos para obtener un promedio
CAPÍTULO 4: RESULTADOS En la mayoría de los resultados de medición se utilizó una herramienta del osciloscopio que permite realizar varias mediciones y hace cálculos estadísticos para obtener un promedio
» Ecuación del movimiento libre de un grado de libertad amortiguado: ED lineal de 2º orden homogénea cuya solución es de la forma:
 1.3. Oscilador armónico amortiguado 1» Ecuación del movimiento libre de un grado de libertad amortiguado: ED lineal de 2º orden homogénea cuya solución es de la forma: Si introducimos esta solución en
1.3. Oscilador armónico amortiguado 1» Ecuación del movimiento libre de un grado de libertad amortiguado: ED lineal de 2º orden homogénea cuya solución es de la forma: Si introducimos esta solución en
Tema 4. Proceso de Muestreo
 Ingeniería de Control Tema 4. Proceso de Muestreo Daniel Rodríguez Ramírez Teodoro Alamo Cantarero Contextualización del tema Conocimientos que se adquieren en este tema: Conocer el proceso de muestreo
Ingeniería de Control Tema 4. Proceso de Muestreo Daniel Rodríguez Ramírez Teodoro Alamo Cantarero Contextualización del tema Conocimientos que se adquieren en este tema: Conocer el proceso de muestreo
Estudio Temporal de Sistemas Continuos de 1 er y 2º Orden
 niversidad Carlos III de Madrid Departamento de Ingeniería de Sistemas y Automática SEÑALES Y SISTEMAS Práctica 1 Estudio Temporal de Sistemas Continuos de 1 er y 2º Orden 1 Introducción Teórica Se denomina
niversidad Carlos III de Madrid Departamento de Ingeniería de Sistemas y Automática SEÑALES Y SISTEMAS Práctica 1 Estudio Temporal de Sistemas Continuos de 1 er y 2º Orden 1 Introducción Teórica Se denomina
CONTROL DE PROCESOS QUÍMICOS
 UNIVERSIDAD NACIONAL EXPERIMENTAL POLITECNICA ANTONIO JOSÉ DE SUCRE VICERRECTORADO BARQUISIMETO DEPARTAMENTO DE INGENIERÍA QUÍMICA CONTROL DE PROCESOS QUÍMICOS Prof: Ing. (MSc). Juan Enrique Rodríguez
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITECNICA ANTONIO JOSÉ DE SUCRE VICERRECTORADO BARQUISIMETO DEPARTAMENTO DE INGENIERÍA QUÍMICA CONTROL DE PROCESOS QUÍMICOS Prof: Ing. (MSc). Juan Enrique Rodríguez
II Unidad Diagramas en bloque de transmisores /receptores
 1 Diagramas en bloque de transmisores /receptores 10-04-2015 2 Amplitud modulada AM Frecuencia modulada FM Diagramas en bloque de transmisores /receptores Amplitud modulada AM En la modulación de amplitud
1 Diagramas en bloque de transmisores /receptores 10-04-2015 2 Amplitud modulada AM Frecuencia modulada FM Diagramas en bloque de transmisores /receptores Amplitud modulada AM En la modulación de amplitud
Amplificador de potencia de audio
 Amplificador de potencia de audio Evolución desde un amplificador básico a un amplificador operacional y su utilización como amplificador de potencia de audio Amplificador de tres etapas con realimentación
Amplificador de potencia de audio Evolución desde un amplificador básico a un amplificador operacional y su utilización como amplificador de potencia de audio Amplificador de tres etapas con realimentación