Introducción a la Realidad Aumentada (parte II) Jairo R. Sánchez Tapia
|
|
|
- Hugo Juan José Saavedra Herrero
- hace 6 años
- Vistas:
Transcripción
 Jairo R. Sánchez Tapia Mar.")
1 Introducción a la Realidad Aumentada (parte II) Jairo R. Sánchez Tapia Mar. 04



2 Motivación La Realidad Aumentada consiste en combinar objetos virtuales con imágenes tomadas del mundo real, creando sensación de coexistencia entre el mundo virtual y real. Mundo real Realidad aumentada Realidad virtual Introducción a la Realidad Aumenteda


3 Modelo pin-hole Modelo de cámara básico: Proyección en perspectiva Centro óptico Plano de imagen Punto principal Eje principal X R Y t Z X Z C f, C f Y Z C C Introducción a la Realidad Aumenteda


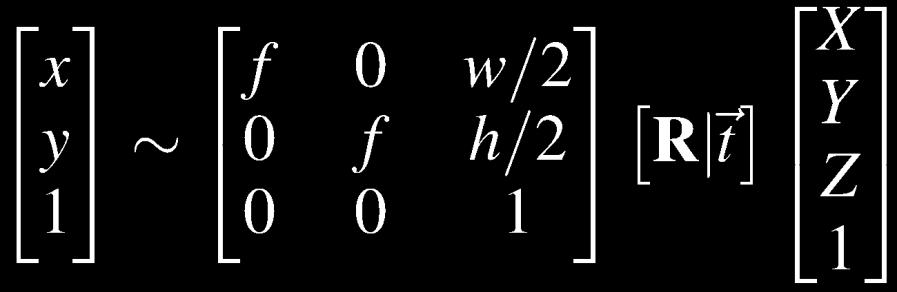


4 Modelo pin-hole Parámetros intrínsecos: Definen el modelo de proyección Parámetros extrínsecos: Definen la posición y orientación

5 Tracking Tracking Sencillo Rápido Poco preciso Inercial Óptico Introducción a la Realidad Aumenteda


6 Tracking Tracking Sencillo Rápido Preciso Interviene la escena Inercial Óptico Con marcadores Introducción a la Realidad Aumenteda

7 Tracking Tracking Rápido Preciso Matching complejo Necesita modelo CAD Inercial Óptico Con marcadores Sin marcadores Basados en modelo CAD Introducción a la Realidad Aumenteda

8 Tracking Tracking Precisos Sin información previa Muy lentos Sólo offline Inercial Óptico Con marcadores Sin marcadores Basados en modelo CAD Sin modelo SFM Introducción a la Realidad Aumenteda
 50k imágenes horas en 496 cores A Strochastic Parallel Method for Real Time")
9 Vídeo Argawal Rome in a Day (Argawal et al. 009) 50k imágenes horas en 496 cores A Strochastic Parallel Method for Real Time Monocular SLAM Applied to Augmented Reality

10 Tracking Tracking Tiempo real Sin información previa Poco precisos Muy lentos Inercial Óptico Con marcadores Sin marcadores Basados en modelo CAD Sin modelo SFM SLAM Introducción a la Realidad Aumenteda
11 Tracking Agenda HOY: SFM & SLAM PARTIMOS DE: Marcadores &CAD Inercial Óptico Con marcadores Sin marcadores Basados en modelo CAD Sin modelo SFM SLAM Introducción a la Realidad Aumenteda




12 Descripción del Problema Entrada: Captura Medidas D: Procesamiento de imagen Salida: Trayectoria: Estimación de movimiento Estructura 3D: cumpliendo: Estimación de estructura 3D A Strochastic Parallel Method for Real Time Monocular SLAM Applied to Augmented Reality
13 Análisis de Imagen Es necesario procesar las imágenes para extraer información de alto nivel: Puntos característicos Uniones Blobs Bordes


14 Tracking Detección Análisis de Imagen Buscar puntos característicos Calcular descriptores Buscar puntos característicos en las zonas inexploradas Calcular un descriptor para cada punto encontrado Flujo óptico Filtro de Kalman Determinar el desplazamiento de cada punto característico Comprobar validez del tracking mediante filtros de Kalman

15 Implementación Sistema de Realidad Aumentada sin marcadores:. Captura de imagen. Detección y tracking D 3. Reconstrucción 3D 4. Tracking de cámara Documentación: Referencia: Shervin Emami, Mastering OpenCV with Practical Computer Vision Projects
16 Estructura del programa Programa compuesto de dos funciones principales: main: función principal encargada de inicializar el programa procesarfotograma: función que se llama automáticamente cada vez que el visor está listo para mostrar un fotograma nuevo main procesarfotograma
17 Análisis de imagen Objetivo: Detectar y trackear puntos característicos a lo largo de la secuencia de vídeo Tareas: Implementar la función detectarpuntoscaracteristicos ENTRADA: imagen SALIDA: vector de puntos D, descriptores SIFT TIPs: ver clases FeatureDetector y DescriptorExtractor // extraer puntos característicos Ptr<FeatureDetector> detector = FeatureDetector::create("SIFT"); detector->detect(img, puntos); // extraer descriptores Ptr<DescriptorExtractor> descextractor = DescriptorExtractor::create("SIFT"); descextractor->compute(img, puntos, descriptores);
18 Análisis de imagen Tareas: Realizar el tracking de puntos característicos en trackearpuntoscaracteristicos ENTRADA: imagen, puntos en fotograma anterior SALIDA: vector de puntos D TIPs: usaremos el algoritmo Optical Flow piramidal vector<pointf> puntos; Mat estado, err; calcopticalflowpyrlk(fotogramaanterior, fotograma, puntosanteriores, puntos, estado, err); for(int i=0; i<estado.rows; i++) { if(estado.at<unsigned char>(i) == ) { puntosnuevos.push_back(puntos[i]); } }
19 Structure From Motion Basado en el efecto de paralaje: C M C
20 Structure From Motion Basado en el efecto de paralaje: «La proyección de un punto en la segunda imagen se desplaza dependiendo de su profundidad.» C M C

21 Structure From Motion Basado en el efecto de paralaje: «La proyección de un punto en la segunda imagen se desplaza dependiendo de su profundidad.» C M La línea que une las dos proyecciones se llama Línea Epipolar C
22 Structure From Motion C m M m C
23 Structure From Motion C m l M e e m C l
24 Structure From Motion Por definición se cumple: m P M e P C Back-projection: M P m C
25 Structure From Motion Por definición se cumple: m P M e P C Back-projection: M P m m e P P m l e P P m 0 m T F


26 Structure From Motion Por definición se cumple: m P M e P C Back-projection: M P m m e P P m l e P P m 0 m T F m m T Matriz Fundamental (3x3 rango ) 0 F
27 Structure From Motion Para cada par de proyecciones (m, m ) se cumple: T m Fm 0 (M. Pollefeys, 00)
28 Structure From Motion Para cada par de proyecciones (m, m ) se cumple: f x y f f f y 0 f 3 f f 3 f f x (M. Pollefeys, 00)
29 Structure From Motion Para cada par de proyecciones (m, m ) se cumple: xx yx x xy yy y x y f 0 f f f f f f f f (M. Pollefeys, 00)

 (M.")
30 Structure From Motion f f f f f f f f f y x y y y y x x x y x x y x y y y y x x x y x x y x y y y y x x x y x x n n n n n n n n n n n n ~0000 ~0000 ~0000 ~0000 ~00 ~00 ~00 ~00 Diferencia significativa en el orden de magnitud de las columnas Solución por mínimos cuadrados falla Hace falta normalizar (Hartley PAMI 97) Con un mínimo de 8 pares de puntos se puede construir un sistema lineal respecto a F Eight point algorithm (Longuet-Higgins, 98) (M. Pollefeys, 00)
31 Structure From Motion Normalmente se tiene más de 8 pares de puntos: sistema sobredeterminado Paso : Calcular el conjunto de pares de puntos Paso : Repetir Paso.: Seleccionar conjunto mínimo (8 puntos) Paso.: Calcular matriz F Paso.3: Calcular número de inliers Hasta que #inliers>95% Paso 3: Calcular F usando todos los inliers RANSAC (Fischler, M. 98)
32 Structure From Motion En el caso de que la cámara esté calibrada se puede obtener las coordenadas normalizadas de las proyecciones: mˆ mˆ K K La matriz Esencial es el caso particular de la matriz Fundamental cuando se conoce la calibración de la cámara: m m T mˆ Emˆ 0 Tiene 5 GDL Depende únicamente de R y t:
33 Ejercicio - Matriz esencial Descomenta la parte de la función main correspondiente al ejercicio. El ejercicio tiene cuatro partes: Calcular puntos característicos en dos fotogramas separados por unos 0 frames Emparejarlos usando sus descriptores Calcular la matriz fundamental Calcular matriz esencial

34 Detección & matching Objetivo: Establecer pares de puntos entre fotogramas lo suficientemente separados Tareas: Usar la función detectarpuntoscaracteristicos del ejercicio anterior Implementar la función emparejardescriptores ENTRADA: descriptores de ambos fotogramas SALIDA: emparejamientos de puntos TIPs: ver clase DescriptorMatcher y algoritmo de fuerza bruta // instanciar matcher del tipo fuerza bruta Ptr<DescriptorMatcher> matcher = DescriptorMatcher::create("BruteForce"); matcher->match(d0, d, matches); // ejecutar el emparejamiento matcher->match(d0, d, matches); Alternativa: usar el cálculo de flujo óptico. Más rápido pero más líneas de código.
35 Matriz fundamental Objetivo: Calcular la matriz fundamental para obtener la reconstrucción inicial Tareas: Implementar la función calcularmatrizfundamental ENTRADA: puntos de las dos imágenes y sus emparejamientos SALIDA: matriz fundamental F, lista de inliers TIPs: ver función findfundamentalmat
36 Matriz fundamental // alinear parejas en dos vectores (requisito de findfundamentalmat) vector<pointf> points0, points; points0.resize( pares.size() ); points.resize( pares.size() ); for(size_t i=0; i<pares.size(); i++) { points0[i] = kp0[ pares[i].queryidx ].pt; points[i] = kp[ pares[i].trainidx ].pt; } // calcular la matriz Mat status; Mat F = findfundamentalmat(points0, points, CV_FM_RANSAC,.0, 0.99, status); // extraer inliers for(size_t i=0; i<points0.size(); i++) { if(status.at<unsigned char>(i) == 0) continue; } inliers0.push_back( points0[i] ); inliers.push_back( points[i] ); return F;
37 Matriz esencial Objetivo: Calcular la matriz esencial a partir de la matriz fundamental Tareas: Implementar la función matrizesencial ENTRADA: matriz de calibración y matriz fundamental SALIDA: matriz esencial F T m 0 E mˆ 0 m T mˆ TIPs: si y pues echa cuentas Mat E = K.t()*F*K; matcher->match(d0, d, matches); return E; Alternativa: calcularla con findfundamentalmat pero usando coordenadas normalizadas
38 Reconstrucción de estructura La posición 3D de los puntos característicos se calcula mediante triangulación lineal.
39 Ejercicio 3 Reconstrucción 3D Descomenta la parte de la función main correspondiente al ejercicio 3. El ejercicio tiene dos partes: Extraer la rotación y traslación de la matriz esencial Triangular los puntos 3D
40 Extraer matriz de rotación y traslación Objetivo: Calcular las matrices de cámara para los dos fotogramas que se usaron para el cálculo de la matriz fundamental. Tareas: Implementar la función extraercamaras ENTRADA: matriz de calibración y matriz esencial SALIDA: matrices de cámara para los dos fotogramas P0 K[ I 0] P K[ R t ] Siendo E Udiag(,,0 ) V T la descomposición SVD de la matriz esencial se cumple que: T P UWV u 3 siendo W
41 Triangular los puntos Objetivo: Calcular la reconstrucción 3D de la escena Tareas: Implementar la función reconstruccion3d ENTRADA: pares de puntos y matrices de cámara de los dos fotogramas SALIDA: estructura 3D de la escena TIPs: ver la función triangulatepoints Mat reconstruccion; triangulatepoints(p0, P, input0, input, reconstruccion); matcher->match(d0, d, matches); return reconstruccion;


42 Añadir Nuevas Vistas Cuando llega una nueva vista se calcula su pose usando emparejamientos D-3D que se pueden inferir a partir de los pares D-D. Partiendo de m [ R t ] M m PM 0 M m (M. Pollefeys, 00)

43 Ejercicio 4 Añadir nuevas vistas Descomenta la parte de la función procesarfotograma correspondiente al ejercicio 4. El ejercicio tiene dos partes: Modificar trackearpuntoscaracteristicos para hacer el emparejamiento D-3D Hacer el cálculo de la transformación
44 Emparejamientos D-3D Objetivo: Para cada punto D devuelto por el optical flow, determinar su correspondecia en la reconstricción 3D. Tareas: Modificar la función trackearpuntoscaracteristicos SALIDA: puntos 3D alineados con puntosnuevos vector<pointf> puntos; Mat estado, err; vector<point3f> matching3d; calcopticalflowpyrlk(fotogramaanterior, fotograma, puntosanteriores, puntos, estado, err); for(int i=0; i<estado.rows; i++) { if(estado.at<unsigned char>(i) == ) { puntosnuevos.push_back(puntos[i]); matching3d.push_back( _reconstruccion[i] ); } } matcher->match(d0, d, matches); _reconstruccion = matching3d;
45 Añadir nuevas vistas Objetivo: Calcular la rotación y traslación para cada fotograma Tareas: Implementar la función trackearcamara ENTRADA: emparejamientos D-3D SALIDA: matriz de transformación TIPs: ver las funciones solvepnpransac y Rodrigues Mat vecrotacion, traslacion; Mat transformacion(3, 4, CV_64FC); solvepnpransac(puntos3d, proyecciones, _intrinsecos, Mat(), vecrotacion, traslacion, false, 00,.0, 500); Rodrigues(vecRotacion, transformacion.colrange(0, 3) ); traslacion.copyto( transformacion.colrange(3, 4 ) ); matcher->match(d0, d, matches); return transformacion;





46 Ajuste de la Estructura Debido a errores es necesario ajustar la estructura y matrices de cámara. Función objetivo: Reconstrucción por geometría epipolar Bundle Adjustment




47 Resumiendo Inicializar estructura Inicializar cámaras con F Ajustar estructura (BA) Extender con nuevas vistas
ESTIMACIÓN N DE LA DISTANCIA RECORRIDA POR UN ROBOT MÓVIL M MEDIANTE LA UTILIZACIÓN N DE DESCRIPTORES SURF
 ESTIMACIÓN N DE LA DISTANCIA RECORRIDA POR UN ROBOT MÓVIL M MEDIANTE LA UTILIZACIÓN N DE DESCRIPTORES SURF Autor: Juan Manuel Peraza Domínguez Tutor: Dr. Luis Moreno Lorente Noviembre de 2009 1 ÍNDICE
ESTIMACIÓN N DE LA DISTANCIA RECORRIDA POR UN ROBOT MÓVIL M MEDIANTE LA UTILIZACIÓN N DE DESCRIPTORES SURF Autor: Juan Manuel Peraza Domínguez Tutor: Dr. Luis Moreno Lorente Noviembre de 2009 1 ÍNDICE
Fundamentos matemáticos básicos de la realidad virtual
 Fundamentos matemáticos básicos de la realidad virtual José Ignacio Ronda Prieto Grupo de Tratamiento de Imágenes, ETSIT, UPM jir@gti.ssr.upm.es Fundamentos matemáticos básicos de la realidad virtual 1
Fundamentos matemáticos básicos de la realidad virtual José Ignacio Ronda Prieto Grupo de Tratamiento de Imágenes, ETSIT, UPM jir@gti.ssr.upm.es Fundamentos matemáticos básicos de la realidad virtual 1
Fundamentos matemáticos básicos de la realidad virtual
 Fundamentos matemáticos básicos de la realidad virtual José Ignacio Ronda Prieto Grupo de Tratamiento de Imágenes, ETSIT, UPM jir@gti.ssr.upm.es Fundamentos matemáticos básicos de la realidad virtual 1
Fundamentos matemáticos básicos de la realidad virtual José Ignacio Ronda Prieto Grupo de Tratamiento de Imágenes, ETSIT, UPM jir@gti.ssr.upm.es Fundamentos matemáticos básicos de la realidad virtual 1
Análisis de imágenes digitales
 Análisis de imágenes digitales SEGMENTACIÓN DE LA IMAGEN Segmentación basada en movimiento INTRODUCCIÓN Una secuencia de imágenes involucra la participación de dos o más imágenes de una determinada escena,
Análisis de imágenes digitales SEGMENTACIÓN DE LA IMAGEN Segmentación basada en movimiento INTRODUCCIÓN Una secuencia de imágenes involucra la participación de dos o más imágenes de una determinada escena,
Técnicas de optimización en visión artificial
 Técnicas de optimización en visión artificial Alberto Martín, Francisco Rivas y JoseMaría Cañas Máster en Visión Artificial Alberto Martín, Francisco Rivas y JoseMaría Cañas Técnicas de optimización en
Técnicas de optimización en visión artificial Alberto Martín, Francisco Rivas y JoseMaría Cañas Máster en Visión Artificial Alberto Martín, Francisco Rivas y JoseMaría Cañas Técnicas de optimización en
Aplicaciones de realidad aumentada en un ipad
 Aplicaciones de realidad aumentada en un ipad Dr. Luis Gerardo de la Fraga Cinvestav, Computer Science Department Av. IPN 2508, 07360 Mexico, D.F., México E-mail: fraga@cs.cinvestav.mx Noviembre 17, 2016
Aplicaciones de realidad aumentada en un ipad Dr. Luis Gerardo de la Fraga Cinvestav, Computer Science Department Av. IPN 2508, 07360 Mexico, D.F., México E-mail: fraga@cs.cinvestav.mx Noviembre 17, 2016
Técnicas de análisis y evaluación de procesos de reconstrucción 3D en el ámbito de la localización por visión
 E.T.S. de Ingeniería Industrial, Informática y de Telecomunicación Técnicas de análisis y evaluación de procesos de reconstrucción 3D en el ámbito de la localización por visión Grado en Ingeniería en Tecnologías
E.T.S. de Ingeniería Industrial, Informática y de Telecomunicación Técnicas de análisis y evaluación de procesos de reconstrucción 3D en el ámbito de la localización por visión Grado en Ingeniería en Tecnologías
LOCALIZACIÓN Y MAPEO SIMULTÁNEO EN TIEMPO REAL, EMPLEANDO UNA CÁMARA MONOCULAR
 LOCALIZACIÓN Y MAPEO SIMULTÁNEO EN TIEMPO REAL, EMPLEANDO UNA CÁMARA MONOCULAR Presentado por: Ing. ANDRES ALEJANDRO DIAZ TORO Director: Dr. Eduardo Caicedo Bravo Asesor: Dra. Lina María Paz GRUPO DE INVESTIGACION
LOCALIZACIÓN Y MAPEO SIMULTÁNEO EN TIEMPO REAL, EMPLEANDO UNA CÁMARA MONOCULAR Presentado por: Ing. ANDRES ALEJANDRO DIAZ TORO Director: Dr. Eduardo Caicedo Bravo Asesor: Dra. Lina María Paz GRUPO DE INVESTIGACION
Visión artificial y Robótica Geometría. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Geometría Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Geometría 2D y 3D Transformación de coordenadas Calibración de la cámara Álgebra necesaria
Visión artificial y Robótica Geometría Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Geometría 2D y 3D Transformación de coordenadas Calibración de la cámara Álgebra necesaria
Reconstrucción Tridimensional a Partir de Varias Imágenes
 Reconstrucción Tridimensional a Partir de Varias Imágenes Dr. Luis Gerardo de la Fraga E-mail: fraga@cs.cinvestav.mx Sección de Computación Departamento de Ingeniería Eléctrica CINVESTAV 22 de noviembre,
Reconstrucción Tridimensional a Partir de Varias Imágenes Dr. Luis Gerardo de la Fraga E-mail: fraga@cs.cinvestav.mx Sección de Computación Departamento de Ingeniería Eléctrica CINVESTAV 22 de noviembre,
Estéreo dinámico. Estéreo dinámico
 Estéreo dinámico 1 Vectores locales de desplazamiento Dada una secuencia de imagenes Tomadas a intervalos Movimiento absoluto: movimiento independiente de la cámara Movimiento relativo: movimiento debido
Estéreo dinámico 1 Vectores locales de desplazamiento Dada una secuencia de imagenes Tomadas a intervalos Movimiento absoluto: movimiento independiente de la cámara Movimiento relativo: movimiento debido
UNIVERSIDAD DE EXTREMADURA. Virtual Blackboard: colour and human gestures motion tracking
 UNIVERSIDAD DE EXTREMADURA Escuela Politécnica I. T. Telecomunicación. Sonido e Imagen Proyecto Fin de Carrera Virtual Blackboard: colour and human gestures motion tracking Alumno: Tutor: Leandro Pavón
UNIVERSIDAD DE EXTREMADURA Escuela Politécnica I. T. Telecomunicación. Sonido e Imagen Proyecto Fin de Carrera Virtual Blackboard: colour and human gestures motion tracking Alumno: Tutor: Leandro Pavón
ANEXO N 4. Algoritmo de Flujo Óptico
 ANEXO N 4 Algoritmo de Flujo Óptico Para la realización del proyecto era necesaria la implementación de algoritmos de detección de movimiento y seguimiento del mismo, por ejemplo al tener un fondo definido
ANEXO N 4 Algoritmo de Flujo Óptico Para la realización del proyecto era necesaria la implementación de algoritmos de detección de movimiento y seguimiento del mismo, por ejemplo al tener un fondo definido
Técnicas de inteligencia artificial. Visión Artificial Reconocimiento de objetos
 Técnicas de inteligencia artificial Visión Artificial Reconocimiento de objetos Indice Introducción Reconocimiento mediante características PCA Introducción El reconocimiento de objetos consiste en, dado
Técnicas de inteligencia artificial Visión Artificial Reconocimiento de objetos Indice Introducción Reconocimiento mediante características PCA Introducción El reconocimiento de objetos consiste en, dado
ANX-PR/CL/ GUÍA DE APRENDIZAJE ASIGNATURA CURSO ACADÉMICO - SEMESTRE FECHA DE PUBLICACION
 Escuela Técnica Superior de de Ingenieros Industriales ANX-PR/CL/001-02 GUÍA DE APRENDIZAJE ASIGNATURA Modelado e Interpretación de Entornos Tridimensionales CURSO ACADÉMICO - SEMESTRE 2014/15 Primer Semestre
Escuela Técnica Superior de de Ingenieros Industriales ANX-PR/CL/001-02 GUÍA DE APRENDIZAJE ASIGNATURA Modelado e Interpretación de Entornos Tridimensionales CURSO ACADÉMICO - SEMESTRE 2014/15 Primer Semestre
UNIVERSIDAD SAN FRANCISCO DE QUITO USFQ. Reconstrucción de un objeto en 3D a partir de fotografías Trabajo experimental. Wilman Daniel Vinueza Jiménez
 UNIVERSIDAD SAN FRANCISCO DE QUITO USFQ Colegio de Ciencias e Ingenierías Reconstrucción de un objeto en 3D a partir de fotografías Trabajo experimental. Wilman Daniel Vinueza Jiménez Ingeniería Electrónica
UNIVERSIDAD SAN FRANCISCO DE QUITO USFQ Colegio de Ciencias e Ingenierías Reconstrucción de un objeto en 3D a partir de fotografías Trabajo experimental. Wilman Daniel Vinueza Jiménez Ingeniería Electrónica
Modélos Matemáticos en Visión por Ordenador
 Modélos Matemáticos en Visión por Ordenador Modelos matemáticos para representar el funcionamiento de una cámara Luis Alvarez Univ. Las Palmas de G.C. Mayo 29 Luis Alvarez (Univ. Las Palmas de G.C. ) Modélos
Modélos Matemáticos en Visión por Ordenador Modelos matemáticos para representar el funcionamiento de una cámara Luis Alvarez Univ. Las Palmas de G.C. Mayo 29 Luis Alvarez (Univ. Las Palmas de G.C. ) Modélos
Visión. Sesión 3: Clasificación de imágenes mediante histogramas y características. Departamento CCIA
 Visión Sesión 3: Clasificación de imágenes mediante histogramas y características Departamento CCIA http://www.jtech.ua.es/vision/2011/ Hoy Aplicaciones: emparejamiento de imágenes, búsqueda de patrones
Visión Sesión 3: Clasificación de imágenes mediante histogramas y características Departamento CCIA http://www.jtech.ua.es/vision/2011/ Hoy Aplicaciones: emparejamiento de imágenes, búsqueda de patrones
VPC - Visión por Ordenador
 Unidad responsable: Unidad que imparte: Curso: Titulación: Créditos ECTS: 2017 205 - ESEIAAT - Escuela Superior de Ingenierías Industrial, Aeroespacial y Audiovisual de Terrassa 739 - TSC - Departamento
Unidad responsable: Unidad que imparte: Curso: Titulación: Créditos ECTS: 2017 205 - ESEIAAT - Escuela Superior de Ingenierías Industrial, Aeroespacial y Audiovisual de Terrassa 739 - TSC - Departamento
UN SISTEMA DE VIDEO VIGILANCIA PARA DETECCIÓN DE CAÍDAS
 UNIVERSIDAD DE MÁLAGA ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA INFORMÁTICA INGENIERÍA SUPERIOR EN INFORMÁTICA ANTEPROYECTO UN SISTEMA DE VIDEO VIGILANCIA PARA DETECCIÓN DE CAÍDAS DIRECTOR DEL PROYECTO: FIRMA:
UNIVERSIDAD DE MÁLAGA ESCUELA TÉCNICA SUPERIOR DE INGENIERÍA INFORMÁTICA INGENIERÍA SUPERIOR EN INFORMÁTICA ANTEPROYECTO UN SISTEMA DE VIDEO VIGILANCIA PARA DETECCIÓN DE CAÍDAS DIRECTOR DEL PROYECTO: FIRMA:
Sistema de apoyo al repostaje en vuelo basado en Visión artificial
 Sistema de apoyo al repostaje en vuelo basado en Visión artificial GRUPO DE PROCESADO MULTIMEDIA DEPARTAMENTO DE TEORÍA DE LA SEÑAL UNIVERSIDAD CARLOS III DE MADRID Objetivos del proyecto y propuesta de
Sistema de apoyo al repostaje en vuelo basado en Visión artificial GRUPO DE PROCESADO MULTIMEDIA DEPARTAMENTO DE TEORÍA DE LA SEÑAL UNIVERSIDAD CARLOS III DE MADRID Objetivos del proyecto y propuesta de
ANX-PR/CL/ GUÍA DE APRENDIZAJE. ASIGNATURA Modelado e interpretacion de entornos tridimensionales
 ANX-PR/CL/001-01 GUÍA DE APRENDIZAJE ASIGNATURA Modelado e interpretacion de entornos tridimensionales CURSO ACADÉMICO - SEMESTRE 2016-17 - Primer semestre GA_05AY_53001157_1S_2016-17 Datos Descriptivos
ANX-PR/CL/001-01 GUÍA DE APRENDIZAJE ASIGNATURA Modelado e interpretacion de entornos tridimensionales CURSO ACADÉMICO - SEMESTRE 2016-17 - Primer semestre GA_05AY_53001157_1S_2016-17 Datos Descriptivos
IMPLEMENTACION DE ODOMETRÍA VISUAL UTILIZANDO UNA CAMARA ESTEREOSCÓPICA MEMORIA PARA OPTAR AL TÍTULO DE INGENIERO CIVIL ELÉCTRICO
 UNIVERSIDAD DE CHILE FACULTAD DE CIENCIAS FÍSICAS Y MATEMÁTICAS DEPARTAMENTO DE INGENIERÍA ELÉCTRICA IMPLEMENTACION DE ODOMETRÍA VISUAL UTILIZANDO UNA CAMARA ESTEREOSCÓPICA MEMORIA PARA OPTAR AL TÍTULO
UNIVERSIDAD DE CHILE FACULTAD DE CIENCIAS FÍSICAS Y MATEMÁTICAS DEPARTAMENTO DE INGENIERÍA ELÉCTRICA IMPLEMENTACION DE ODOMETRÍA VISUAL UTILIZANDO UNA CAMARA ESTEREOSCÓPICA MEMORIA PARA OPTAR AL TÍTULO
Visión por computadora Computer vision
 Visión por computadora Computer vision Conjunto de algoritmos que permiten obtener una representación visual del mundo, suficiente para la realización de una tarea dada. Representación visual El mundo:
Visión por computadora Computer vision Conjunto de algoritmos que permiten obtener una representación visual del mundo, suficiente para la realización de una tarea dada. Representación visual El mundo:
TEMARIO CURSO AFTER EFFECTS 5.5
 1 TEMARIO CURSO AFTER EFFECTS 5.5 Este curso esta diseñado para conocer las técnicas del programa, incluye el trabajo con la interface, y el desarrollo de proyectos de efectos en vídeo aplicando diferentes
1 TEMARIO CURSO AFTER EFFECTS 5.5 Este curso esta diseñado para conocer las técnicas del programa, incluye el trabajo con la interface, y el desarrollo de proyectos de efectos en vídeo aplicando diferentes
Técnicas de inteligencia artificial. Visión Artificial Extracción de características
 Técnicas de inteligencia artificial Visión Artificial Extracción de características Indice Transformada de Hough Características: SIFT Transformada de Hough Fundamentos: Motivación: Desarrollar técnicas
Técnicas de inteligencia artificial Visión Artificial Extracción de características Indice Transformada de Hough Características: SIFT Transformada de Hough Fundamentos: Motivación: Desarrollar técnicas
9. Anexos. 9.1 Nociones básicas sobre Visión por Computador
 9. Anexos 9.1 Nociones básicas sobre Visión por Computador Modelo Pinhole El modelo básico de una cámara Pinhole consta de un centro óptico C, en donde convergen todos los rayos de la proyección, y un
9. Anexos 9.1 Nociones básicas sobre Visión por Computador Modelo Pinhole El modelo básico de una cámara Pinhole consta de un centro óptico C, en donde convergen todos los rayos de la proyección, y un
Transformaciones 2D. Andrea Rueda. Introducción a la Computación Gráfica. Pontificia Universidad Javeriana Departamento de Ingeniería de Sistemas
 Introducción a la Computación Gráfica Andrea Rueda Pontificia Universidad Javeriana Departamento de Ingeniería de Sistemas Transformaciones Transformaciones geométricas o de modelado: Operaciones que se
Introducción a la Computación Gráfica Andrea Rueda Pontificia Universidad Javeriana Departamento de Ingeniería de Sistemas Transformaciones Transformaciones geométricas o de modelado: Operaciones que se
AUTOCALIBRACIÓN DE UNA CÁMARA PTZ
 AUTOCALIBRACIÓN DE UNA CÁMARA PTZ ANDRÉS MAURICIO DE ANGULO BARRERA PONTIFICIA UNIVERSIDAD JAVERIANA FACULTAD DE INGENIERÍA DEPARTAMENTO DE ELECTRÓNICA BOGOTÁ D.C NOVIEMBRE DE 2010 1 AUTOCALIBRACIÓN DE
AUTOCALIBRACIÓN DE UNA CÁMARA PTZ ANDRÉS MAURICIO DE ANGULO BARRERA PONTIFICIA UNIVERSIDAD JAVERIANA FACULTAD DE INGENIERÍA DEPARTAMENTO DE ELECTRÓNICA BOGOTÁ D.C NOVIEMBRE DE 2010 1 AUTOCALIBRACIÓN DE
Técnicas de inteligencia artificial. Visión Artificial Visión 3D
 Técnicas de inteligencia artificial Visión Artificial Visión 3D Indice Introducción Visión estéreo Introducción Cuando usamos una cámara, perdemos la información 3D x y z y x z y x Sin embargo, la información
Técnicas de inteligencia artificial Visión Artificial Visión 3D Indice Introducción Visión estéreo Introducción Cuando usamos una cámara, perdemos la información 3D x y z y x z y x Sin embargo, la información
IDENTIFICACIÓN DE SISTEMAS MÉTODOS POR SUB-ESPACIOS
 IDENTIFICACIÓN DE SISTEMAS MÉTODOS POR SUB-ESPACIOS Ing. Fredy Ruiz Ph.D. ruizf@javeriana.edu.co Maestría en Ingeniería Electrónica Pontificia Universidad Javeriana 2013 Introduccion La teoría de sistemas
IDENTIFICACIÓN DE SISTEMAS MÉTODOS POR SUB-ESPACIOS Ing. Fredy Ruiz Ph.D. ruizf@javeriana.edu.co Maestría en Ingeniería Electrónica Pontificia Universidad Javeriana 2013 Introduccion La teoría de sistemas
Documento de Requisitos. Estacionamiento Inteligente
 Documento de Requisitos de Estacionamiento Inteligente Fecha 06/07/2012 Versión 0.2 Integrantes del grupo Francisco Becker Eduardo Castillo Víctor Fernández Ignacio Gómez Prefacio Este es el Documento
Documento de Requisitos de Estacionamiento Inteligente Fecha 06/07/2012 Versión 0.2 Integrantes del grupo Francisco Becker Eduardo Castillo Víctor Fernández Ignacio Gómez Prefacio Este es el Documento
Estereoscopía activa en mediciones tri-dimensionales, prueba experimental de la exactitud de bajo costo
 Estereoscopía activa en mediciones tri-dimensionales, prueba experimental de la exactitud de bajo costo Presentan: M.I. Octavio Icasio Hernández, Dr. Miguel Viliesid Alonso oicasio,mviliesi@cenam.mx SEXTA
Estereoscopía activa en mediciones tri-dimensionales, prueba experimental de la exactitud de bajo costo Presentan: M.I. Octavio Icasio Hernández, Dr. Miguel Viliesid Alonso oicasio,mviliesi@cenam.mx SEXTA
C =[x 1,y 1,x 2,y 2,...,x n,y n ]
![C =[x 1,y 1,x 2,y 2,...,x n,y n ]](/thumbs/53/30823632.jpg "C =[x 1,y 1,x 2,y 2,...,x n,y n ]") Práctica 1 Realizar un programa que presente una nube de puntos en 2D utilizando los comandos de OpenGL vistos en clase. Los puntos deben variar aleatoriamente al menos en posición y color. Realizar un
Práctica 1 Realizar un programa que presente una nube de puntos en 2D utilizando los comandos de OpenGL vistos en clase. Los puntos deben variar aleatoriamente al menos en posición y color. Realizar un
Trabajo Fin de Grado. Estudio de técnica de generación de modelos 3D a partir de secuencias de imágenes
 ESCUELA TÉCNICA SUPERIOR DE INGENIEROS INDUSTRIALES Y DE TELECOMUNICACIÓN UNIVERSIDAD DE CANTABRIA Trabajo Fin de Grado Estudio de técnica de generación de modelos 3D a partir de secuencias de imágenes
ESCUELA TÉCNICA SUPERIOR DE INGENIEROS INDUSTRIALES Y DE TELECOMUNICACIÓN UNIVERSIDAD DE CANTABRIA Trabajo Fin de Grado Estudio de técnica de generación de modelos 3D a partir de secuencias de imágenes
El pipeline de visualización es el conjunto de
 Sistemas de Visualización Pipeline de visualización 3D Definición del modelo geométrico Transformaciones geométricas Transformaciones de visualización Volumen de visualización Proyecciones Pipeline de
Sistemas de Visualización Pipeline de visualización 3D Definición del modelo geométrico Transformaciones geométricas Transformaciones de visualización Volumen de visualización Proyecciones Pipeline de
[20380] Visió per Computador Prueba 2 (2013) Teoria (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)
![[20380] Visió per Computador Prueba 2 (2013) Teoria (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)](/thumbs/53/32802790.jpg "[20380] Visió per Computador Prueba 2 (2013) Teoria (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)") 102784 [20380] Visió per Computador Prueba 2 (2013) Teoria (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada) 1. En cuál de estas posibles aplicaciones podríamos utilizar una característica
102784 [20380] Visió per Computador Prueba 2 (2013) Teoria (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada) 1. En cuál de estas posibles aplicaciones podríamos utilizar una característica
TEMA 1 Álgebra de matrices 4 sesiones. TEMA 2 Determinantes 4 sesiones. TEMA 3 Sistemas de ecuaciones 4 sesiones
 1.1. MATEMÁTICAS II TEMPORALIZACIÓN Y SECUENCIACIÓN: TEMA 1 Álgebra de matrices 4 sesiones TEMA 2 Determinantes 4 sesiones TEMA 3 Sistemas de ecuaciones 4 sesiones TEMA 4 Vectores en el espacio 4 sesiones
1.1. MATEMÁTICAS II TEMPORALIZACIÓN Y SECUENCIACIÓN: TEMA 1 Álgebra de matrices 4 sesiones TEMA 2 Determinantes 4 sesiones TEMA 3 Sistemas de ecuaciones 4 sesiones TEMA 4 Vectores en el espacio 4 sesiones
Análisis de imágenes digitales
 Análisis de imágenes digitales REPRESENTACIÓN Y DESCRIPCIÓN Rasgos morfológicos RASGOS GEOMÉTRICOS El área y perímetro de un objeto son dos rasgos primarios que se utilizan cuando el tamaño de las regiones
Análisis de imágenes digitales REPRESENTACIÓN Y DESCRIPCIÓN Rasgos morfológicos RASGOS GEOMÉTRICOS El área y perímetro de un objeto son dos rasgos primarios que se utilizan cuando el tamaño de las regiones
Proyecto docente de la asignatura
 Proyecto docente de la asignatura Asignatura Materia Módulo Titulación APLICACIÓN DE LA VISIÓN ARTIFICIAL EN ENTORNOS DE PRODUCCIÓN Programación de aplicaciones entornos avanzados de producción Informática
Proyecto docente de la asignatura Asignatura Materia Módulo Titulación APLICACIÓN DE LA VISIÓN ARTIFICIAL EN ENTORNOS DE PRODUCCIÓN Programación de aplicaciones entornos avanzados de producción Informática
Tema 4: Viendo en 3D
 J. Ribelles SIE020: Síntesis de Imagen y Animación Institute of New Imaging Technologies, Universitat Jaume I Contenido Introducción 1 Introducción 2 3 Proyección Paralela Proyección Perspectiva 4 5 6
J. Ribelles SIE020: Síntesis de Imagen y Animación Institute of New Imaging Technologies, Universitat Jaume I Contenido Introducción 1 Introducción 2 3 Proyección Paralela Proyección Perspectiva 4 5 6
Trabajo Fin de Grado. Estudio e implementación de algoritmo de generación de mapas de profundidad a partir de imágenes estéreo
 ESCUELA TÉCNICA SUPERIOR DE INGENIEROS INDUSTRIALES Y DE TELECOMUNICACIÓN UNIVERSIDAD DE CANTABRIA Trabajo Fin de Grado Estudio e implementación de algoritmo de generación de mapas de profundidad a partir
ESCUELA TÉCNICA SUPERIOR DE INGENIEROS INDUSTRIALES Y DE TELECOMUNICACIÓN UNIVERSIDAD DE CANTABRIA Trabajo Fin de Grado Estudio e implementación de algoritmo de generación de mapas de profundidad a partir
Universidad Nacional de Córdoba Facultad de Matemática Astronomía y Física
 Universidad Nacional de Córdoba Facultad de Matemática Astronomía y Física Trabajo Especial Licenciatura en Ciencias de la Computación Reconstrucción 3D desde secuencias de video Autor: Pablo Brendstrup
Universidad Nacional de Córdoba Facultad de Matemática Astronomía y Física Trabajo Especial Licenciatura en Ciencias de la Computación Reconstrucción 3D desde secuencias de video Autor: Pablo Brendstrup
Visión artificial y Robótica Detección de movimiento y flujo óptico. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Detección de movimiento y flujo óptico Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Introducción Flujo óptico Structure From Motion Introducción
Visión artificial y Robótica Detección de movimiento y flujo óptico Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Introducción Flujo óptico Structure From Motion Introducción
Generación de modelos tridimensionales a partir de una secuencia de imágenes. Sergio Ricardo Murguia Santana
 Generación de modelos tridimensionales a partir de una secuencia de imágenes Sergio Ricardo Murguia Santana 31 de julio de 2005 2 Índice general 1. Introducción* 5 1.1. Modelo de la cámara*........................
Generación de modelos tridimensionales a partir de una secuencia de imágenes Sergio Ricardo Murguia Santana 31 de julio de 2005 2 Índice general 1. Introducción* 5 1.1. Modelo de la cámara*........................
Parámetros Redundantes para Rotación y Traslación en Cinemática
 Parámetros Redundantes para Rotación y Traslación en Cinemática O. Altuzarra, A. Hernández, E. Amezua, V. Petuya Universidad del País Vasco - Euskal Herriko Unibertsitatea Departamento de Ingeniería Mecánica,
Parámetros Redundantes para Rotación y Traslación en Cinemática O. Altuzarra, A. Hernández, E. Amezua, V. Petuya Universidad del País Vasco - Euskal Herriko Unibertsitatea Departamento de Ingeniería Mecánica,
Mínimos cuadrados. Mayo de Ejemplos de introducción. Observación preliminar
 Mínimos cuadrados Mayo de 2015. Ejemplos de introducción Observación preliminar Sean dos matrices A y B, por ejemplo a b A =, B = c d x z y t Las columnas de A representan los vectores u = (a; c) y v =
Mínimos cuadrados Mayo de 2015. Ejemplos de introducción Observación preliminar Sean dos matrices A y B, por ejemplo a b A =, B = c d x z y t Las columnas de A representan los vectores u = (a; c) y v =
1. Análisis Teórico. 1.1. Microscopio Óptico. 1.2. Teoría de Formación de Imágenes de Abbe. Resolución. Laboratorio de Ondas y Óptica.
 Laboratorio de Ondas y Óptica Práctica N 7 Microscopía Óptica Digital Departamento de Física, FaCyT. Universidad de Carabobo, Venezuela. Objetivos Estudiar el funcionamiento de un Microscopio Óptico Preparación
Laboratorio de Ondas y Óptica Práctica N 7 Microscopía Óptica Digital Departamento de Física, FaCyT. Universidad de Carabobo, Venezuela. Objetivos Estudiar el funcionamiento de un Microscopio Óptico Preparación
Ejercicios de Ampliación de Geometría. Hoja 2
 Ejercicios de Ampliación de Geometría Licenciatura en Ciencias Matemáticas, 2 Curso 27 de Octubre de 2008 Hoja 2 Dualidad y radiaciones. 1. Formular y resolver en el espacio proyectivo dual los siguientes
Ejercicios de Ampliación de Geometría Licenciatura en Ciencias Matemáticas, 2 Curso 27 de Octubre de 2008 Hoja 2 Dualidad y radiaciones. 1. Formular y resolver en el espacio proyectivo dual los siguientes
Ejercicios de Gráficos Proyecciones
 Ejercicios de Gráficos Proyecciones Pedro Pascual 17 de marzo de 2010 1. Indicar cuáles de las siguientes afirmaciones son verdaderas (V) y cúales son falsas (F): 1. La pseudodistancia 3D viene determinada
Ejercicios de Gráficos Proyecciones Pedro Pascual 17 de marzo de 2010 1. Indicar cuáles de las siguientes afirmaciones son verdaderas (V) y cúales son falsas (F): 1. La pseudodistancia 3D viene determinada
Extracción de características
 Extracción de características Gonzalez & Woods, Digital Image Processing, cap. 8 extracción de características 1 Propiedades de las características Tienen que ser robustos: la extracción debe ser insensible
Extracción de características Gonzalez & Woods, Digital Image Processing, cap. 8 extracción de características 1 Propiedades de las características Tienen que ser robustos: la extracción debe ser insensible
Visión artificial y Robótica. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Definición y clasificación Reconocimiento basado en la apariencia Bag of words Deep learning Parte
Visión artificial y Robótica Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Definición y clasificación Reconocimiento basado en la apariencia Bag of words Deep learning Parte
CONTEO DE PERSONAS EN ESPACIOS FÍSICOS POR MEDIO DE VISIÓN COMPUTACIONAL
 CONTEO DE PERSONAS EN ESPACIOS FÍSICOS POR MEDIO DE VISIÓN COMPUTACIONAL Misael Armenta Nieto 1, Moisés García Villanueva 2, Leonardo Romero Muñoz 3 Resumen En el presente trabajo se presenta el diseño
CONTEO DE PERSONAS EN ESPACIOS FÍSICOS POR MEDIO DE VISIÓN COMPUTACIONAL Misael Armenta Nieto 1, Moisés García Villanueva 2, Leonardo Romero Muñoz 3 Resumen En el presente trabajo se presenta el diseño
CONJUNTO R n. = (5, 2, 10) de 3, son linealmente. = (2,1,3) y v 3. = (0,1, 1) y u 3. = (2,0,3, 1), u 3. = (1,1, 0,m), v 2
 de 3, son linealmente. = (2,1,3) y v 3. = (0,1, 1) y u 3. = (2,0,3, 1), u 3. = (1,1, 0,m), v 2") CONJUNTO R n.- Considerar los vectores u = (, -3, ) y v = (, -, ) de 3 : a) Escribir, si es posible, los vectores (, 7, -4) y (, -5, 4) como combinación lineal de u y v. b) Para qué valores de x es el
CONJUNTO R n.- Considerar los vectores u = (, -3, ) y v = (, -, ) de 3 : a) Escribir, si es posible, los vectores (, 7, -4) y (, -5, 4) como combinación lineal de u y v. b) Para qué valores de x es el
Tema 3: Transformaciones Geométricas
 J. Ribelles SIE020: Síntesis de Imagen y Animación Institute of New Imaging Technologies, Universitat Jaume I Contenido Introducción 1 Introducción 2 Traslación Escalado Rotación 3 4 5 6 Introducción Por
J. Ribelles SIE020: Síntesis de Imagen y Animación Institute of New Imaging Technologies, Universitat Jaume I Contenido Introducción 1 Introducción 2 Traslación Escalado Rotación 3 4 5 6 Introducción Por
Aplicación para la obtención de un mapa 3D de una escena con un dispositivo Android
 Escola Tècnica Superior d Enginyeria Informàtica Universitat Politècnica de València Aplicación para la obtención de un mapa 3D de una escena con un dispositivo Android Trabajo Fin de Grado Grado en Ingeniería
Escola Tècnica Superior d Enginyeria Informàtica Universitat Politècnica de València Aplicación para la obtención de un mapa 3D de una escena con un dispositivo Android Trabajo Fin de Grado Grado en Ingeniería
UNIVERSIDAD DE CASTILLA-LA MANCHA ESCUELA SUPERIOR DE INFORMÁTICA INGENIERÍA EN INFORMÁTICA PROYECTO DE FIN DE CARRERA
 UNIVERSIDAD DE CASTILLA-LA MANCHA ESCUELA SUPERIOR DE INFORMÁTICA INGENIERÍA EN INFORMÁTICA PROYECTO DE FIN DE CARRERA ARGES: Sistema de Posicionamiento en Interiores Basado en Técnicas de Realidad Aumentada
UNIVERSIDAD DE CASTILLA-LA MANCHA ESCUELA SUPERIOR DE INFORMÁTICA INGENIERÍA EN INFORMÁTICA PROYECTO DE FIN DE CARRERA ARGES: Sistema de Posicionamiento en Interiores Basado en Técnicas de Realidad Aumentada
RGBD Análisis para el. Automático de acciones con Kinect. Proyecto Final de Carrera:
 Proyecto Final de Carrera: RGBD Análisis para el Reconocimiento Automático de acciones con Kinect. Autor: Gabriel Domínguez Cisternes. Directores: Sergio Escalera y Miguel Reyes. 1 Índice Contexto y Motivación.
Proyecto Final de Carrera: RGBD Análisis para el Reconocimiento Automático de acciones con Kinect. Autor: Gabriel Domínguez Cisternes. Directores: Sergio Escalera y Miguel Reyes. 1 Índice Contexto y Motivación.
Problemas de vectores
 Problemas de vectores 1.- Expresa el vector mm = (1, 2, 3) como combinación lineal de los vectores: uu = (1, 0, 1), vv = (1, 1, 0) y ww = (0, 1, 1). 2.- Siendo uu = (1, 0, 1), vv = (1, 1, 0) y ww = (0,
Problemas de vectores 1.- Expresa el vector mm = (1, 2, 3) como combinación lineal de los vectores: uu = (1, 0, 1), vv = (1, 1, 0) y ww = (0, 1, 1). 2.- Siendo uu = (1, 0, 1), vv = (1, 1, 0) y ww = (0,
Morfometría Geométrica
 Escuela Tecnología Medica Facultad de Medicina Universidad de Chile Morfometría Geométrica Curso Fotografía Médica Prof. Alejandra García Prof. Karina Palma Morfometría Geométrica (MG) Métodos relacionados
Escuela Tecnología Medica Facultad de Medicina Universidad de Chile Morfometría Geométrica Curso Fotografía Médica Prof. Alejandra García Prof. Karina Palma Morfometría Geométrica (MG) Métodos relacionados
Geometría del plano y el espacio
 Geometría del plano y el espacio AMD Grado en Ingeniería Informática AMD Grado en Ingeniería Informática (UM) Geometría del plano y el espacio 1 / 21 Objetivos Al final de este tema tendréis que Conocer
Geometría del plano y el espacio AMD Grado en Ingeniería Informática AMD Grado en Ingeniería Informática (UM) Geometría del plano y el espacio 1 / 21 Objetivos Al final de este tema tendréis que Conocer
Tesis de Máster. Reconstrucción densa de modelos tridimensionales utilizando Visión Artificial. Unai Mujika Torrontegi. Donostia, Septiembre de 2010
 Tesis de Máster Reconstrucción densa de modelos tridimensionales utilizando Visión Artificial Unai Mujika Torrontegi Donostia, Septiembre de 21 Universidad del País Vasco / Euskal Herriko Unibertsitatea
Tesis de Máster Reconstrucción densa de modelos tridimensionales utilizando Visión Artificial Unai Mujika Torrontegi Donostia, Septiembre de 21 Universidad del País Vasco / Euskal Herriko Unibertsitatea
Generación de modelos 3D a partir de dos imágenes fotogramétricas 3D models generation from two photogrammetric images
 Artículo de Investigación. Revista Ciencia e Ingeniería. Vol. 37, No. 1 pp. 11-18, diciembre - marzo, 2016. ISSN 1316-7081. ISSN Elect. 2244-8780 Universidad de los Andes (ULA) Generación de modelos 3D
Artículo de Investigación. Revista Ciencia e Ingeniería. Vol. 37, No. 1 pp. 11-18, diciembre - marzo, 2016. ISSN 1316-7081. ISSN Elect. 2244-8780 Universidad de los Andes (ULA) Generación de modelos 3D
ROBÓTICA I. Cinemática Directa
 Cinemática Directa M. C. Jorge Luis Barahona Avalos 2 de mayo de 2012 Universidad Tecnológica de la Mixteca Instituto de Electrónica y Mecatrónica 1 / 42 Índice General 1 Cinemática Directa 2 Cadena Cinemática
Cinemática Directa M. C. Jorge Luis Barahona Avalos 2 de mayo de 2012 Universidad Tecnológica de la Mixteca Instituto de Electrónica y Mecatrónica 1 / 42 Índice General 1 Cinemática Directa 2 Cadena Cinemática
donde,, es controlable si y solo si la matriz de controlabilidad tiene rango,
 TEORÍA DE CONTROL Tema 8. Controlabilidad y Observabilidad La controlabilidad y la observabilidad son dos conceptos desarrollados para la representación de sistemas en espacio de estado, estos permiten
TEORÍA DE CONTROL Tema 8. Controlabilidad y Observabilidad La controlabilidad y la observabilidad son dos conceptos desarrollados para la representación de sistemas en espacio de estado, estos permiten
Análisis de la imagen y visión 3D. Áreas de investigación y tecnologías:
 2012 Análisis de la imagen y visión 3D Áreas de investigación y tecnologías: Detección de objetos Segmentación y seguimiento de objetos Inpainting de imagen y video 2D y 3D Reconstrucción 3D Generación
2012 Análisis de la imagen y visión 3D Áreas de investigación y tecnologías: Detección de objetos Segmentación y seguimiento de objetos Inpainting de imagen y video 2D y 3D Reconstrucción 3D Generación
dx = x El tensor x/ X se denomina tensor gradiente de la deformación F = x
 Capítulo 2 Cinemática El desarrollo de las expresiones contenidas en este capítulo se lleva a cabo en un sistema de referencia general cartesiano {I 1 I 2 I 3 }. La notación es, con algunas diferencias,
Capítulo 2 Cinemática El desarrollo de las expresiones contenidas en este capítulo se lleva a cabo en un sistema de referencia general cartesiano {I 1 I 2 I 3 }. La notación es, con algunas diferencias,
Análisis de algoritmos
 Tema 11: Algoritmos de empate de cadenas M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx @edfrancom edgardoadrianfrancom 1 Contenido Introducción Empate de cadenas Fuerza
Tema 11: Algoritmos de empate de cadenas M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx @edfrancom edgardoadrianfrancom 1 Contenido Introducción Empate de cadenas Fuerza
Detección de Colisiones. Héctor Navarro
 Detección de Colisiones Héctor Navarro Ecuaciones del Plano Un plano 3D se define por una normal y una distancia a lo largo de esa normal Ecuación del plano ( Nx, Ny, Nz) ( x, y, z) d 0 Encontrar d: (
Detección de Colisiones Héctor Navarro Ecuaciones del Plano Un plano 3D se define por una normal y una distancia a lo largo de esa normal Ecuación del plano ( Nx, Ny, Nz) ( x, y, z) d 0 Encontrar d: (
UNIVERSIDAD DE LAS FUERZAS ARMADAS-ESPE EXTENSIÓN LATACUNGA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN
 UNIVERSIDAD DE LAS FUERZAS ARMADAS-ESPE EXTENSIÓN LATACUNGA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE MONITOREO DE TEMPERATURA CORPORAL Y AMBIENTAL APLICANDO
UNIVERSIDAD DE LAS FUERZAS ARMADAS-ESPE EXTENSIÓN LATACUNGA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE MONITOREO DE TEMPERATURA CORPORAL Y AMBIENTAL APLICANDO
Introducción al Análisis del Coste de Algoritmos
 1/11 Introducción al Análisis del Coste de Algoritmos Josefina Sierra Santibáñez 7 de noviembre de 2017 2/11 Eficiencia de un Algoritmo Analizar un algoritmo significa, en el contexto de este curso, predecir
1/11 Introducción al Análisis del Coste de Algoritmos Josefina Sierra Santibáñez 7 de noviembre de 2017 2/11 Eficiencia de un Algoritmo Analizar un algoritmo significa, en el contexto de este curso, predecir
= λ + 1 y el punto A(0, 7, 5)
") 94 GEOMETRÍA ANALÍTICA DEL ESPACIO en las PAU de Asturias Dados los puntos A(1, 0, 1), B(l, 1, 1) y C(l, 6, a), se pide: a) hallar para qué valores del parámetro a están alineados b) hallar si existen
94 GEOMETRÍA ANALÍTICA DEL ESPACIO en las PAU de Asturias Dados los puntos A(1, 0, 1), B(l, 1, 1) y C(l, 6, a), se pide: a) hallar para qué valores del parámetro a están alineados b) hallar si existen
Trabajo Fin de Grado. Evaluación de ORBSLAM en Secuencias de Endoscopia Médica
 Trabajo Fin de Grado Evaluación de ORBSLAM en Secuencias de Endoscopia Médica Autor Iñigo Cirauqui Viloria Director Jose María Martínez Montiel Departamento de Informática e Ingeniería de Sistemas Escuela
Trabajo Fin de Grado Evaluación de ORBSLAM en Secuencias de Endoscopia Médica Autor Iñigo Cirauqui Viloria Director Jose María Martínez Montiel Departamento de Informática e Ingeniería de Sistemas Escuela
LIM. Simulador de grúa hidráulica para aplicaciones marinas. Proyecto de fin de carrera. Ingeniería Industrial.
 Proyecto de fin de carrera. Simulador de grúa hidráulica para aplicaciones marinas. Ingeniería Industrial. Autor: Pedro Cobo Beltrán Tutor: Daniel Dopico Dopico Enero, 2011 Índice Grúa real Dinámica de
Proyecto de fin de carrera. Simulador de grúa hidráulica para aplicaciones marinas. Ingeniería Industrial. Autor: Pedro Cobo Beltrán Tutor: Daniel Dopico Dopico Enero, 2011 Índice Grúa real Dinámica de
NOTAS DE ESTUDIO DE ÁLGEBRA LINEAL M.C. MARCOS CAMPOS NAVA TEC DE ATITALAQUIA
 Hasta ahora se han discutido algunas de las propiedades de objetos matemáticos llamados matrices. Un caso de especial interés son las matrices cuadradas, por ejemplo: Se sabe que esta matriz es invertible
Hasta ahora se han discutido algunas de las propiedades de objetos matemáticos llamados matrices. Un caso de especial interés son las matrices cuadradas, por ejemplo: Se sabe que esta matriz es invertible
10212 Aplicaciones de la Ingeniería Electrónica II
 Universitat de les Illes Balears Departament de Ciències Matemàtiques i Inormàtica 10212 Aplicaciones de la Ingeniería Electrónica II Máster en Ingeniería Electrónica Calibración geométrica de cámaras.
Universitat de les Illes Balears Departament de Ciències Matemàtiques i Inormàtica 10212 Aplicaciones de la Ingeniería Electrónica II Máster en Ingeniería Electrónica Calibración geométrica de cámaras.
Análisis de imágenes digitales
 Análisis de imágenes digitales REPRESENTACIÓN Y DESCRIPCIÓN Momentos INTRODUCCIÓN En general, la relación entre una imagen ideal f(x,y) y una imagen observada g(x,y) se describe como g =D( f ) donde D
Análisis de imágenes digitales REPRESENTACIÓN Y DESCRIPCIÓN Momentos INTRODUCCIÓN En general, la relación entre una imagen ideal f(x,y) y una imagen observada g(x,y) se describe como g =D( f ) donde D
Cómo leer este libro? PARTE 1. Android Wear CAPÍTULO 1. Introducción a Android Wear y las notificaciones... 19
 Contenido Cómo leer este libro?... 15 PARTE 1. Android Wear... 17 CAPÍTULO 1. Introducción a Android Wear y las notificaciones... 19 1.2.1. Relojes inteligentes... 21 1.2.2. Pulseras... 21 1.2.3. Gafas
Contenido Cómo leer este libro?... 15 PARTE 1. Android Wear... 17 CAPÍTULO 1. Introducción a Android Wear y las notificaciones... 19 1.2.1. Relojes inteligentes... 21 1.2.2. Pulseras... 21 1.2.3. Gafas
RECTIFICACIÓN DE DOCUMENTOS USANDO CONJUNTOS FUZZY Y OPERACIONES MORFOLÓGICAS.
 RECTIFICACIÓN DE DOCUMENTOS USANDO CONJUNTOS FUZZY Y OPERACIONES MORFOLÓGICAS. Procesamiento Imágenes Digitales Grupo 1 Autores: María José Casuso Segovia José María Marquez Toro Víctor Zamora Roldán 1.
RECTIFICACIÓN DE DOCUMENTOS USANDO CONJUNTOS FUZZY Y OPERACIONES MORFOLÓGICAS. Procesamiento Imágenes Digitales Grupo 1 Autores: María José Casuso Segovia José María Marquez Toro Víctor Zamora Roldán 1.
Capítulo 4. Detección del Objeto Conocido, Medición de su Tamaño Virtual y Cálculo de la Distancia
 Capítulo 4. Detección del Objeto Conocido, Medición de su Tamaño Virtual y Cálculo de la Distancia 4.1 Características del objeto a medir El objeto a ser procesado es de dimensiones conocidas, y tiene
Capítulo 4. Detección del Objeto Conocido, Medición de su Tamaño Virtual y Cálculo de la Distancia 4.1 Características del objeto a medir El objeto a ser procesado es de dimensiones conocidas, y tiene
AutoCAD Civil 3D permite recuperar datos de imagen y de terreno desde Google Earth, así como publicar y ver los datos de diseño en Google Earth.
 Manual para Importación y exportación con Google Earth AutoCAD Civil 3D 2010 Autodesk inc. AutoCAD Civil 3D permite recuperar datos de imagen y de terreno desde Google Earth, así como publicar y ver los
Manual para Importación y exportación con Google Earth AutoCAD Civil 3D 2010 Autodesk inc. AutoCAD Civil 3D permite recuperar datos de imagen y de terreno desde Google Earth, así como publicar y ver los
ROBÓTICA I. Cinemática Directa
 Cinemática Directa M. C. Jorge Luis Barahona Avalos 11 de abril de 2011 Universidad Tecnológica de la Mixteca Instituto de Electrónica y Mecatrónica 1 / 34 Índice General 1 Cinemática Directa 2 Cadena
Cinemática Directa M. C. Jorge Luis Barahona Avalos 11 de abril de 2011 Universidad Tecnológica de la Mixteca Instituto de Electrónica y Mecatrónica 1 / 34 Índice General 1 Cinemática Directa 2 Cadena
Ubicación De Coordenadas 3D Para Un Brazo Robótico De 3 Grados De Libertad Mediante Técnicas De Visión Por Computador Y Control Digital
 Revista Colombiana de Física, Vol. 43, No.1 de 2011. Ubicación De Coordenadas 3D Para Un Brazo Robótico De 3 Grados De Libertad Mediante Técnicas De Visión Por Computador Y Control Digital 3D Coordinate
Revista Colombiana de Física, Vol. 43, No.1 de 2011. Ubicación De Coordenadas 3D Para Un Brazo Robótico De 3 Grados De Libertad Mediante Técnicas De Visión Por Computador Y Control Digital 3D Coordinate
Estimación de homografías
 Estimación de homografías Visión en Robótica 1er cuatrimestre de 2013 1 Introducción del problema Una homografía es una transformación proyectiva que determina una correspondencia entre puntos El problema
Estimación de homografías Visión en Robótica 1er cuatrimestre de 2013 1 Introducción del problema Una homografía es una transformación proyectiva que determina una correspondencia entre puntos El problema
EXAMEN JUNIO PP 1A SEMANA
 EXAMEN JUNIO PP A SEMANA XAVI AZNAR Ejercicio. Defina semejanza, razón de semejanza y movimento asociado a una semejanza. Ejercicio. En el espacio vectorial V 3 (R) sea q la forma cuadrática cuya expresión
EXAMEN JUNIO PP A SEMANA XAVI AZNAR Ejercicio. Defina semejanza, razón de semejanza y movimento asociado a una semejanza. Ejercicio. En el espacio vectorial V 3 (R) sea q la forma cuadrática cuya expresión
Herramienta de Autor para la Creación de 3D Trackable Model (3DTM)
") Facultad de Informática Informatika Fakultatea TITULACIÓN: Ingeniería Informática Herramienta de Autor para la Creación de 3D Trackable Model (3DTM) Alumno: Rubén de Celis Hernández Director: Alejandro
Facultad de Informática Informatika Fakultatea TITULACIÓN: Ingeniería Informática Herramienta de Autor para la Creación de 3D Trackable Model (3DTM) Alumno: Rubén de Celis Hernández Director: Alejandro
Introducción al proceso digital de imagen y visión por computador
 Introducción al proceso digital de imagen y visión por computador Ilustraciones extraidas de diversas fuentes 1 Libros de referencia Gonzalez & Woods Digital Image Processing Addison-Wesley Klette& Schluns&Koshan
Introducción al proceso digital de imagen y visión por computador Ilustraciones extraidas de diversas fuentes 1 Libros de referencia Gonzalez & Woods Digital Image Processing Addison-Wesley Klette& Schluns&Koshan
2 Transformaciones en 3D
 2 Transformaciones en 3D La manera más fácil de conseguir las transformaciones básicas (traslación, rotación, escalación, en general las transformaciones afines) es utilizando matrices de transformación.
2 Transformaciones en 3D La manera más fácil de conseguir las transformaciones básicas (traslación, rotación, escalación, en general las transformaciones afines) es utilizando matrices de transformación.
Tema 7. Tema Introducción. Gràfics per Computador 2004/2005 Tema 7. Proyecciones 1. Paso de 3D a 2D
 Tema 7 Tema 7 Tema 7. Proyecciones 7.1 Introducción 7.2 Proyección perspectiva 7.3 Proyección paralela ortográfica 7.4 Matrices de proyección 7.5 Modelo de la cámara Gràfics per Computador 2004/2005 Tema
Tema 7 Tema 7 Tema 7. Proyecciones 7.1 Introducción 7.2 Proyección perspectiva 7.3 Proyección paralela ortográfica 7.4 Matrices de proyección 7.5 Modelo de la cámara Gràfics per Computador 2004/2005 Tema
CINEMÁTICA Y DINÁMICA DE ROBOTS MANIPULADORES: RESPUESTAS DE EJERCICIOS UNIDAD 02. Roger Miranda Colorado
 CINEMÁTICA Y DINÁMICA DE ROBOTS MANIPULADORES: RESPUESTAS DE EJERCICIOS UNIDAD Roger Miranda Colorado de mayo de 6 Índice. RESPUESTAS DE EJERCICIOS UNIDAD . RESPUESTAS DE EJERCICIOS UNIDAD A continuación
CINEMÁTICA Y DINÁMICA DE ROBOTS MANIPULADORES: RESPUESTAS DE EJERCICIOS UNIDAD Roger Miranda Colorado de mayo de 6 Índice. RESPUESTAS DE EJERCICIOS UNIDAD . RESPUESTAS DE EJERCICIOS UNIDAD A continuación
Sólido Rígido. Miguel Ángel Otaduy. Animación Avanzada 6 de Febrero de 2014
 Sólido Rígido Miguel Ángel Otaduy Animación Avanzada 6 de Febrero de 2014 Vídeo Juegos Batman: Arkham Asylum (nvidia Physx) Índice Cinemática Traslación, rotación Velocidad lineal, velocidad angular Dinámica
Sólido Rígido Miguel Ángel Otaduy Animación Avanzada 6 de Febrero de 2014 Vídeo Juegos Batman: Arkham Asylum (nvidia Physx) Índice Cinemática Traslación, rotación Velocidad lineal, velocidad angular Dinámica
Francisco J. Hernández López
 Francisco J. Hernández López fcoj23@cimat.mx Proceso computacional que transforma una o más imágenes de entrada en una imagen de salida. Se utiliza para analizar e interpretar la imagen, por medio de algoritmos
Francisco J. Hernández López fcoj23@cimat.mx Proceso computacional que transforma una o más imágenes de entrada en una imagen de salida. Se utiliza para analizar e interpretar la imagen, por medio de algoritmos
Triangulación de polígonos
 Computación Geométrica Triangulación de polígonos Algoritmos iniciales Introducción a la Geometría Computacional Copyright 2010-2011 Universidad de Alicante 1 Índice Historia Conceptos previos Triangulación
Computación Geométrica Triangulación de polígonos Algoritmos iniciales Introducción a la Geometría Computacional Copyright 2010-2011 Universidad de Alicante 1 Índice Historia Conceptos previos Triangulación
Andrea María Witt García
 UNIVERSIDAD SAN FRANCISCO DE QUITO Colegio de Ciencias e Ingeniería Algoritmo de Calibración en MATLAB para Cámaras Digitales Andrea María Witt García Luis Miguel Prócel, MSc., Director de Tesis Tesis
UNIVERSIDAD SAN FRANCISCO DE QUITO Colegio de Ciencias e Ingeniería Algoritmo de Calibración en MATLAB para Cámaras Digitales Andrea María Witt García Luis Miguel Prócel, MSc., Director de Tesis Tesis
Localización. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy?. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de llegar? Planificación
M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy?. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de llegar? Planificación
Visión artificial: Una tecnología clave en la nueva revolución industrial
 Visión artificial: Una tecnología clave en la nueva revolución industrial Vicomtech-Ik4 Industry and advanced Manufacturing Iñigo Barandiaran Martirena Tecnologías Research and Innovation Strategy for
Visión artificial: Una tecnología clave en la nueva revolución industrial Vicomtech-Ik4 Industry and advanced Manufacturing Iñigo Barandiaran Martirena Tecnologías Research and Innovation Strategy for
Análisis de imágenes digitales
 Análisis de imágenes digitales EXTRACCIÓN DE PATRONES Transformada de Hough La transformada de Hough es método de extracción de características patentado por Paul Hough en 1962 *, para la detección de
Análisis de imágenes digitales EXTRACCIÓN DE PATRONES Transformada de Hough La transformada de Hough es método de extracción de características patentado por Paul Hough en 1962 *, para la detección de
ALGEBRA LINEAL. Capítulo III: Vectores en los espacios bidimensional y tridimensional. MsC. Andrés Baquero. jueves, 2 de julio de 15
 ALGEBRA LINEAL Capítulo III: Vectores en los espacios bidimensional y tridimensional MsC. Andrés Baquero jueves, 2 de julio de 15 Introducción a los vectores Vectores Geométricos Vectores Geométricos Vectores
ALGEBRA LINEAL Capítulo III: Vectores en los espacios bidimensional y tridimensional MsC. Andrés Baquero jueves, 2 de julio de 15 Introducción a los vectores Vectores Geométricos Vectores Geométricos Vectores
Sensado basado en visión para el control de un sistema de Barra y Bola
 Sensado basado en visión para el control de un sistema de Barra y Bola Autor: Ezequiel Pecker Marcosig Tutor: Aníbal Zanini Universidad de Buenos Aires Facultad de Ingeniería Agosto 11, 2010 1/ 11 Introducción
Sensado basado en visión para el control de un sistema de Barra y Bola Autor: Ezequiel Pecker Marcosig Tutor: Aníbal Zanini Universidad de Buenos Aires Facultad de Ingeniería Agosto 11, 2010 1/ 11 Introducción
Relación de problemas. Álgebra lineal.
 Relación de problemas Álgebra lineal Tema 1 Sección 1 Matrices Determinantes Sistemas lineales Matrices Ejercicio 11 Consideremos las siguientes matrices: ( 1 2 A = 1 1 ) ( 1 1 B = 0 1 ) C = 1 0 0 0 1
Relación de problemas Álgebra lineal Tema 1 Sección 1 Matrices Determinantes Sistemas lineales Matrices Ejercicio 11 Consideremos las siguientes matrices: ( 1 2 A = 1 1 ) ( 1 1 B = 0 1 ) C = 1 0 0 0 1