I2C. Ing. Pablo Martín Gomez
|
|
|
- Marina Prado Ramírez
- hace 8 años
- Vistas:
Transcripción
1 I2C Ing. Pablo Martín Gomez 1

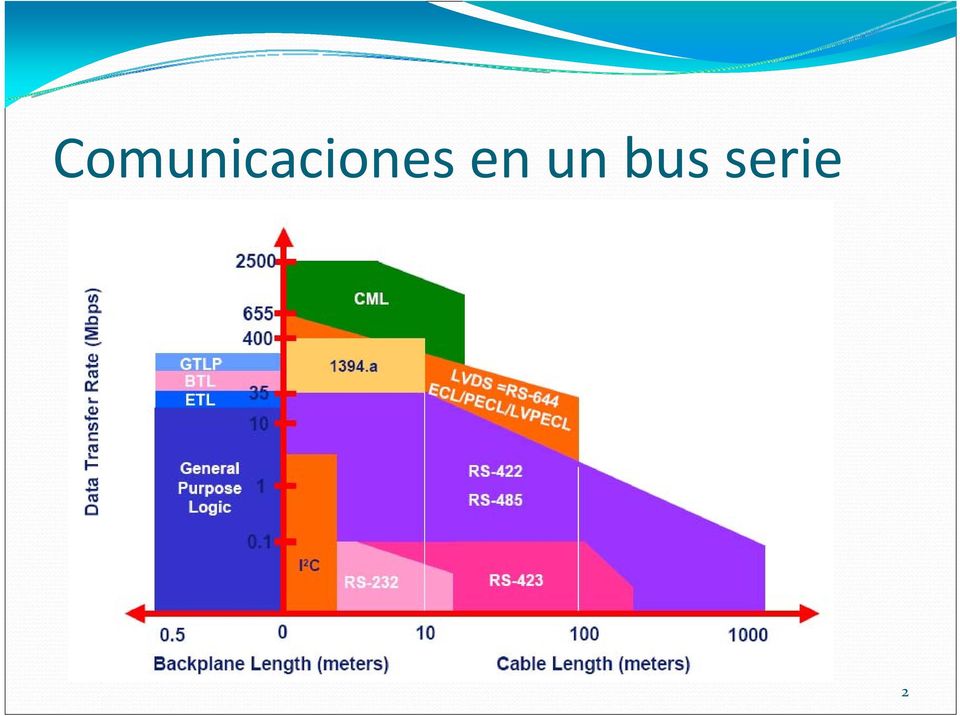
2 Comunicaciones en un bus serie 2
3 Comunicaciones en un bus serie 3

4 I²C Velocidad 4

5 UART Universal Asynchronous Receiver Transmitter Estándar de comunicación implementado en los 60 s Simple, universal, bien entendido, mucho soporte Estándar de comunicación de baja velocidad: hasta 1 Mbits/s La señal de clock no está incluida en los datos: Emisor y Receptor deben acordar parámetros de timing por adelantado Los bits de Start y Stop bits indican datos a enviar Puede enviarse información de paridad 5

6 Comunicaciones en un bus serie Una red punto a punto no requiere la señal de control Select Una comunicación asincrónica no tiene señal de Clock Dependiendo del protocolo, las señales de Data, Select y R/W pueden compartir la misma línea Solamente el master puede comenzar una comunicación. Los slaves (esclavos) solamente `hablan cuando se les habla` 6

7 SPI Serial Peripheral Interface (SPI) es una conexión de datos serial sincrónica de 4 líneas full duplex: SCLK: Serial Clock MOSI: Master Out Slave In (Datos del Master al Slave) MISO: Master In Slave Out (Datos del Slave al Master) SS: Slave Select (Selección de Slave) Desarrollado originalmente por Motorola Utilizado para conectar los periféricos entre sí y con los microprocesadores Se necesitan 3 + n líneas siendo n = número de dispositivos Solamente un master activo a la vez Varias velocidades de transmisión (función del clock del sistema) 7

8 SPI Configuración Esquema de transmisión simple: 8 o 16 bits Comunicaciones Full duplex El número de líneas es proporcional al número de dispositivos del bus 8

9 I²C (Inter IC) Bus desarrollado por Philips en los 80 s Bus simple y bi direccional de 2 líneas: serial data (SDA) serial clock (SCL) Se ha convertido en estándar de la industria y es utilizado por los mayores productores de circuitos integrados (IC) Bus con capacidad Multi master (arbitraje) Comunicación Master Slave; Solamente entre dos dispositivos Cada IC en el bus se identifica a través de su propia dirección El slave puede ser: Únicamente un dispositivo receptor Transmisor con la capacidad de recibir y transmitir datos 9

10 I²C Arquitectura de Hardware 10

11 I²C condiciones de START/STOP Los datos en SDA tienen que ser estables con SCL en alto Las excepciones son las condiciones de START y STOP 11

12 I²C Direccionamiento Cada dispositivo está direccionado individualmente por software Única dirección por dispositivo: fijo o con una parte programable a través de pines de hardware varios dispositivos pueden compartir el mismo bus Distribución de direcciones coordinado por I 2 C bus committee 12

13 I²C formatos de 7 bit y 10 bit El 1º byte después del START determina la dirección del slave Algunas excepciones a la regla: dirección General Call : R/W = 0 direccionamiento slave de 10 bit: XX + R/W = X Direccionamiento de 7 bits Direccionamiento de 10 bits 13

14 I²C Operaciones Lectura / Escritura Escritura a un dispositivo slave Lectura de un dispositivo slave 14

15 I²C Operaciones Lectura / Escritura Acknowledge Es efectuado en el 9no pulso de clock y es obligatorio El transmisor libera la línea SDA El receptor pone en bajo la línea SDA (SCL tiene que estar en alto) La transferencia se aborta si no hay acknowledge (ojo con debug!) 15
 La transferencia se aborta si no hay acknowledge (ojo con")
16 I²C Arbitraje Dos o más masters pueden generar una condición de START al mismo tiempo El arbitraje se efectua sobre la línea SDA mientras SCL está en alto Los slaves no están involucrados 16

17 I²C Sincronización del Clock Todos los masters generan su propio clock sobre la línea SCL para transmitir sus mensajes sobre el bus I2C Un clock definido es necesario para que el arbitraje bit a bit pueda ocurrir La sincronización del clock es efectuada a través de una compuerta AND en las interfaces I 2 C a la línea SCL El período bajo es determinado por el dispositivo con más largo período bajo El período alto es determinado por el dispositivo con más corto período alto 17

18 I²C Manejando I²C Hay 3 maneras básicas de manejar el bus I²C: Con un microcontrolador con interfaz I²C on chip Bit oriented CPU interrumpido después de cada transmisión de bit Byte oriented CPU puede ser interrumpido después de cada transmisión de byte Con cualquier microcontrolador: 'Bit Banging El protocolo I²C puede ser emulado bit a bit a través de cualquier puerto open drain bi direccional Con un microcontrolador en conjunto con un integrado interfaz paralelo / bus I²C 18

19 I²C Conflicto de direccionamiento Cuando un dispositivo no puede cambiar su dirección I²C (fijo), solamente uno de su tipo puede estar conectado al bus Un multiplexor I 2 C puede ser utilizado para eliminar esta limitación permite dividir dinámicamente el bus principal I 2 C en varias sub ramas de modo de poder comunicarse con uno a la vez programable a través de I 2 C: sin pines adicionales de control más de un multiplexor puede conectarse al mismo bus I 2 C 19

20 I²C PCA9548 Precio: 1.28 U$S (Mouser) 8 channel I2C bus switch with reset 20

21 Fuentes _overview.pdf DesignCon 2003 TecForum I2C Bus Overview 21
El Protocolo SPI. IES Juan de la Cierva. Aprendizaje de la Electrónica a través de la Robótica. Fernando Remiro Domínguez
 El Protocolo SPI IES Juan de la Cierva Aprendizaje de la Electrónica a través de la Robótica Fernando Remiro Domínguez Serial Periferical Interface (SPI) SPI es un bus de tres líneas, sobre el cual se
El Protocolo SPI IES Juan de la Cierva Aprendizaje de la Electrónica a través de la Robótica Fernando Remiro Domínguez Serial Periferical Interface (SPI) SPI es un bus de tres líneas, sobre el cual se
SPI. Teoría y Aplicaciones. INGENIERIA EN MICROCONTROLADORES Protocolo SPI( Serial Peripherical Interface) Protocolo
 Protocolo") Protocolo SPI INGENIERIA EN MICROCONTROLADORES Protocolo SPI( Serial Peripherical Interface) Teoría y Aplicaciones INGENIERÍA EN MICROCONTROLADORES Curso de Redes de Microcontroladores PIC (Protocolo SPI)
Protocolo SPI INGENIERIA EN MICROCONTROLADORES Protocolo SPI( Serial Peripherical Interface) Teoría y Aplicaciones INGENIERÍA EN MICROCONTROLADORES Curso de Redes de Microcontroladores PIC (Protocolo SPI)
Comunicación Serie IIC: Inter-Integrated Circuit
 Comunicación Serie IIC: Inter-Integrated Circuit IIC: Inter-Integrated Circuit I2C es un bus serial, multi-master, de baja velocidad (de 10 a 400kbps), creado por Philips. El objetivo es facilitar la conexión
Comunicación Serie IIC: Inter-Integrated Circuit IIC: Inter-Integrated Circuit I2C es un bus serial, multi-master, de baja velocidad (de 10 a 400kbps), creado por Philips. El objetivo es facilitar la conexión
Curso sobre Microcontroladores Familia HC9S08 de Freescale
 Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
TEMA 20.0. EL BUS I 2 C (Inter Integrated Circuit Bus) I2C EN C
 I2C EN C") TEMA 20.0 EL BUS I 2 C (Inter Integrated Circuit Bus) I2C EN C La comunicación n serie en los PIC 16F87X Los microcontroladores PIC de la familia 16F78x, tienen la posibilidad de comunicación serie, las
TEMA 20.0 EL BUS I 2 C (Inter Integrated Circuit Bus) I2C EN C La comunicación n serie en los PIC 16F87X Los microcontroladores PIC de la familia 16F78x, tienen la posibilidad de comunicación serie, las
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Características del datalogger autónomo EJERCICIO: El datalogger o registrador debe sensar la temperatura ambiente cada 1s y guardarla junto a la fecha y hora de adquisición en un archivo.txt alojado en
Características del datalogger autónomo EJERCICIO: El datalogger o registrador debe sensar la temperatura ambiente cada 1s y guardarla junto a la fecha y hora de adquisición en un archivo.txt alojado en
Curso sobre Microcontroladores Familia HC9S08 de Freescale
 Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
Curso sobre Microcontroladores Familia HC9S08 de Freescale
 Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 7.- Módulo Serial Sincrónico de Comunicaciones
Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 7.- Módulo Serial Sincrónico de Comunicaciones
COMUNICACIONES. Medios para transmitir señales: Conexión por lazo de corriente 4 20 ma. Transmisión analógica: corriente proporcional a una magnitud
 PLCs COMUNICACIONES Introducción Medios para transmitir señales: Conexión por lazo de corriente 4 20 ma Transmisión analógica: corriente proporcional a una magnitud Extremo receptor incluye un conversor
PLCs COMUNICACIONES Introducción Medios para transmitir señales: Conexión por lazo de corriente 4 20 ma Transmisión analógica: corriente proporcional a una magnitud Extremo receptor incluye un conversor
BUS I2C. IES Los Viveros Sevilla Dpto. Electrónica. 1
 BUS I2C Se trata de un protocolo serie desarrollado por Philips Semiconductors usado por muchos integrados para comunicarse entre ellos, para su funcionamiento requiere sólo dos líneas, una de reloj (SCL)
BUS I2C Se trata de un protocolo serie desarrollado por Philips Semiconductors usado por muchos integrados para comunicarse entre ellos, para su funcionamiento requiere sólo dos líneas, una de reloj (SCL)
Introducción a Arduino
 9 de Noviembre de 2012 Indice-I Plataforma Estándar Electrónica IDE Conceptos básicos electrónica Ley de Ohm y efecto Joule Ruido, puntos sin conexión y efecto rebote Semiconductores Conceptos básicos
9 de Noviembre de 2012 Indice-I Plataforma Estándar Electrónica IDE Conceptos básicos electrónica Ley de Ohm y efecto Joule Ruido, puntos sin conexión y efecto rebote Semiconductores Conceptos básicos
Enlaces Seriales UART, I2C, SPI
 Comunicaciones, Enlaces Seriales UART, I2C, SPI (Preparen Papel y Lápiz) Diagrama de Bloques Fecha y Hora Entradas Procesamiento Procesamiento Comunicación Comunicación Universidad TransmisiónNacional
Comunicaciones, Enlaces Seriales UART, I2C, SPI (Preparen Papel y Lápiz) Diagrama de Bloques Fecha y Hora Entradas Procesamiento Procesamiento Comunicación Comunicación Universidad TransmisiónNacional
Memoria 24LC256 I. I NTRODUCCIÓN
 1 Memoria 24LC256 I. I NTRODUCCIÓN I2C es un bus de comunicación serial sincrónica desarrollado por Phillips Semiconductors a principios de los años 80 s, con la principal intención de interconectar una
1 Memoria 24LC256 I. I NTRODUCCIÓN I2C es un bus de comunicación serial sincrónica desarrollado por Phillips Semiconductors a principios de los años 80 s, con la principal intención de interconectar una
Diseño de un sistema de adquisición de datos de un micrófono utilizando una FPGA
 Diseño de un sistema de adquisición de datos de un micrófono utilizando una FPGA Experimental III: Introducción a la Microfabricación y FPGA - Instituto Balseiro Mauricio Tosi Diciembre de 2013 Resumen
Diseño de un sistema de adquisición de datos de un micrófono utilizando una FPGA Experimental III: Introducción a la Microfabricación y FPGA - Instituto Balseiro Mauricio Tosi Diciembre de 2013 Resumen
Tema 3. Buses. Arquitectura de computadores. Plan 96. Curso 2010-2011. Jerarquía de buses
 Tema 3. Buses 1. Introducción Jerarquía de buses Clasificación Fases de una transacción 2. Transferencia de datos 3. Temporización Bus síncrono Bus asíncrono Bus semisíncrono 4. Arbitraje del bus Centralizado
Tema 3. Buses 1. Introducción Jerarquía de buses Clasificación Fases de una transacción 2. Transferencia de datos 3. Temporización Bus síncrono Bus asíncrono Bus semisíncrono 4. Arbitraje del bus Centralizado
COMUNICACIÓN I2C (INTER-INTEGRATED CIRCUIT)
") COMUNICACIÓN I2C (INTER-INTEGRATED CIRCUIT) Centro CFP/ES COMUNICACIÓN I2C 1 VENTAJAS DE LA COMUNICACIÓN I2C COMPARATIVA ESTANDAR DE TRANSMISIÓN 2 DISPOSITIVOS I2C DISPOSITIVOS I2C MAX518 3 DISPOSITIVOS
COMUNICACIÓN I2C (INTER-INTEGRATED CIRCUIT) Centro CFP/ES COMUNICACIÓN I2C 1 VENTAJAS DE LA COMUNICACIÓN I2C COMPARATIVA ESTANDAR DE TRANSMISIÓN 2 DISPOSITIVOS I2C DISPOSITIVOS I2C MAX518 3 DISPOSITIVOS
TRABAJO PRÁCTICO Nº 6: PUERTO SERIE
 TRABAJO PRÁCTICO Nº 6: PUERTO SERIE Introducción a las comunicaciones serie Las comunicaciones serie se utilizan para enviar datos a través de largas distancias, ya que las comunicaciones en paralelo exigen
TRABAJO PRÁCTICO Nº 6: PUERTO SERIE Introducción a las comunicaciones serie Las comunicaciones serie se utilizan para enviar datos a través de largas distancias, ya que las comunicaciones en paralelo exigen
Microprocesadores, Tema 8:
 Microprocesadores, Tema 8: Periféricos de Comunicación Síncronos Guillermo Carpintero Marta Ruiz Universidad Carlos III de Madrid Standard de Comunicación Protocolos Standard de Comunicación Serie Síncrona
Microprocesadores, Tema 8: Periféricos de Comunicación Síncronos Guillermo Carpintero Marta Ruiz Universidad Carlos III de Madrid Standard de Comunicación Protocolos Standard de Comunicación Serie Síncrona
BUSES. Una comunicación compartida Un conjunto de cables para comunicar múltiples subsistemas. Memoria
 BUSES UPCO ICAI Departamento de Electrónica y Automática 1 Qué es un bus? Una comunicación compartida Un conjunto de cables para comunicar múltiples subsistemas Procesador Control Datapath Memoria Entrada
BUSES UPCO ICAI Departamento de Electrónica y Automática 1 Qué es un bus? Una comunicación compartida Un conjunto de cables para comunicar múltiples subsistemas Procesador Control Datapath Memoria Entrada
AUTOMATIZACIÓN - CURSO: 2010-2011- Práctica 4: Sistema de Monitorización de tiempo mediante Arduino
 AUTOMATIZACIÓN - CURSO: 2010-2011- Juan Antonio Corrales Ramón Carlos Alberto Jara Bravo Fernando Torres Medina Grupo de Innovación Educativa en Automática Departamento de Física, Ingeniería de Sistemas
AUTOMATIZACIÓN - CURSO: 2010-2011- Juan Antonio Corrales Ramón Carlos Alberto Jara Bravo Fernando Torres Medina Grupo de Innovación Educativa en Automática Departamento de Física, Ingeniería de Sistemas
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Ing. Guillermo Murcia Ing. Jorge Luis Strack gjmurcia@fi.mdp.edu.ar jlstrack@fi.mdp.edu.ar Lecto-grabadora de SDcard - Se comunica con Arduino a través del protocolo de comunicación SPI. - Se comanda a
Ing. Guillermo Murcia Ing. Jorge Luis Strack gjmurcia@fi.mdp.edu.ar jlstrack@fi.mdp.edu.ar Lecto-grabadora de SDcard - Se comunica con Arduino a través del protocolo de comunicación SPI. - Se comanda a
UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3
 UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3 INTRODUCCIÓN El elemento hardware de un sistema básico de proceso de datos se puede estructurar en tres partes claramente diferenciadas en cuanto a sus funciones:
UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3 INTRODUCCIÓN El elemento hardware de un sistema básico de proceso de datos se puede estructurar en tres partes claramente diferenciadas en cuanto a sus funciones:
Curso sobre Microcontroladores Familia HC9S08 de Freescale
 Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 6.- Módulo Serial Asincrónico de Comunicación
Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 6.- Módulo Serial Asincrónico de Comunicación
BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC MEMORIAS EEPROM SERIE
 BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC MEMORIAS EEPROM SERIE Fernando Nuño García 1 Ventajas del BUS I2C Definido inicialmente a mediados de los 80 para trabajar a 100kbit/s y en 1995
BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC MEMORIAS EEPROM SERIE Fernando Nuño García 1 Ventajas del BUS I2C Definido inicialmente a mediados de los 80 para trabajar a 100kbit/s y en 1995
COMUNICACIÓN SERIAL FAMILIA DSP56800: Síncronas y Asíncronas CAPÍTULO VII
 Página 1 de 21 INTRODUCCIÓN CAPÍTULO VII El intercambio de información digital entre un procesador y los periféricos puede ser de dos formas: de manera paralela o serial. La primera implica el envió simultáneo
Página 1 de 21 INTRODUCCIÓN CAPÍTULO VII El intercambio de información digital entre un procesador y los periféricos puede ser de dos formas: de manera paralela o serial. La primera implica el envió simultáneo
2 Sea una unidad de disco duro de brazo móvil con las siguientes características:
 1 Sea una unidad de disco duro de brazo móvil con las siguientes características: 18 superficies, 20.331 cilindros y 400 sectores por pista. Sectores de 1.024 bytes de información neta. Velocidad de rotación:
1 Sea una unidad de disco duro de brazo móvil con las siguientes características: 18 superficies, 20.331 cilindros y 400 sectores por pista. Sectores de 1.024 bytes de información neta. Velocidad de rotación:
ACTIVIDADES TEMA 1. EL LENGUAJE DE LOS ORDENADORES. 4º E.S.O- SOLUCIONES.
 1.- a) Explica qué es un bit de información. Qué es el lenguaje binario? Bit es la abreviatura de Binary digit. (Dígito binario). Un bit es un dígito del lenguaje binario que es el lenguaje universal usado
1.- a) Explica qué es un bit de información. Qué es el lenguaje binario? Bit es la abreviatura de Binary digit. (Dígito binario). Un bit es un dígito del lenguaje binario que es el lenguaje universal usado
La Unidad Procesadora.
 La Unidad Procesadora. En un sistema digital complejo, la capa de hardware de la máquina es el nivel más bajo del modelo de capas de un sistema microcomputarizado. La unidad procesadora es una parte del
La Unidad Procesadora. En un sistema digital complejo, la capa de hardware de la máquina es el nivel más bajo del modelo de capas de un sistema microcomputarizado. La unidad procesadora es una parte del
Control y temporización Comunicación con la CPU Comunicación con el dispositivo externo Almacén temporal de datos Detección de errores
 UNIDAD DE ENTRADA SALIDA Conceptos Unidad de entrada-salida (E/S): Elemento que proporciona un método de comunicación eficaz entre el sistema central y el periférico. Funciones Control y temporización
UNIDAD DE ENTRADA SALIDA Conceptos Unidad de entrada-salida (E/S): Elemento que proporciona un método de comunicación eficaz entre el sistema central y el periférico. Funciones Control y temporización
CAPÍTULO 3 LA COMUNICACIÓN SERIAL
 CAPÍTULO 3 LA COMUNICACIÓN SERIAL 3.1 Introducción. La historia de las comunicaciones se remonta a 1810 cuando un señor alemán de apellido Von Soemmering, utilizó 26 cables (1 por cada letra del alfabeto)
CAPÍTULO 3 LA COMUNICACIÓN SERIAL 3.1 Introducción. La historia de las comunicaciones se remonta a 1810 cuando un señor alemán de apellido Von Soemmering, utilizó 26 cables (1 por cada letra del alfabeto)
Entrada salida y comunicación
 Entrada salida y comunicación E/S de los computadores Introducción: Variedad de dispositivos. Modo de transfer. Tipo de información. Diferencias de velocidades (tasas de transferencias). Ejemplos de periféricos:
Entrada salida y comunicación E/S de los computadores Introducción: Variedad de dispositivos. Modo de transfer. Tipo de información. Diferencias de velocidades (tasas de transferencias). Ejemplos de periféricos:
8.3 PROFIBUS 8.3 PROFIBUS
 PROFIBUS es el líder mundial en redes multifuncionales de célula y campo. Estandarizado bajo las normas europeas EN 50170 y EN 50254 Existen más de 3 5 millones de dispositivos PROFIBUS Profibus Internacional
PROFIBUS es el líder mundial en redes multifuncionales de célula y campo. Estandarizado bajo las normas europeas EN 50170 y EN 50254 Existen más de 3 5 millones de dispositivos PROFIBUS Profibus Internacional
Comunicación serial por Aircable Lessly Marlene Sabido Calzada. Seminario del Proyecto de Investigación en robótica Humanoide
 Comunicación serial por Aircable Lessly Marlene Sabido Calzada Seminario del Proyecto de Investigación en robótica Humanoide Objetivo Conocer el protocolo de comunicación serial RS232 Conocer el protocolo
Comunicación serial por Aircable Lessly Marlene Sabido Calzada Seminario del Proyecto de Investigación en robótica Humanoide Objetivo Conocer el protocolo de comunicación serial RS232 Conocer el protocolo
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Ejercicio: construir un datalogger El datalogger o registrador debe sensar la temperatura ambiente cada 1s y guardarla junto a la fecha y hora de adquisición en un archivo.txt alojado en una memoria µsd.
Ejercicio: construir un datalogger El datalogger o registrador debe sensar la temperatura ambiente cada 1s y guardarla junto a la fecha y hora de adquisición en un archivo.txt alojado en una memoria µsd.
TEMA7. SISTEMAS SECUENCIALES
 Sistemas Secuenciales 1 TEMA7. SISTEMAS SECUENCIALES Los circuitos lógicos se clasifican en dos tipos: Combinacionales, aquellos cuyas salidas sólo dependen de las entradas actuales. Secuenciales, aquellos
Sistemas Secuenciales 1 TEMA7. SISTEMAS SECUENCIALES Los circuitos lógicos se clasifican en dos tipos: Combinacionales, aquellos cuyas salidas sólo dependen de las entradas actuales. Secuenciales, aquellos
Experiencia 2 y 3 : Cableado y Switchs (Documentación)
") Experiencia 2 y 3 : Cableado y Switchs (Documentación) 1 Objetivos: Complementar los conocimientos teóricos y prácticos del alumno en el campo de las redes de computadores. Aprender las características
Experiencia 2 y 3 : Cableado y Switchs (Documentación) 1 Objetivos: Complementar los conocimientos teóricos y prácticos del alumno en el campo de las redes de computadores. Aprender las características
COMUNICACION DE PLC S MEDIANTE EL PUERTO RS- 485 Y MONITOREADO POR PANTALLA.
 COMUNICACION DE PLC S MEDIANTE EL PUERTO RS- 485 Y MONITOREADO POR PANTALLA. Planteamiento: Usando dos PLC s de la familia SS y dos pantallas AS35THTD, desarrollar un programa para el PLC ESCLAVO que cuente
COMUNICACION DE PLC S MEDIANTE EL PUERTO RS- 485 Y MONITOREADO POR PANTALLA. Planteamiento: Usando dos PLC s de la familia SS y dos pantallas AS35THTD, desarrollar un programa para el PLC ESCLAVO que cuente
Curso S08 para Cavernícolas
 Curso S08 para Cavernícolas Tema ORIGENES DE LOS MICROCONTROLADORES FREESCALE, 2014 Todos los derechos reservados INTRODUCION Desde sus inicios como Motorola, esta empresa ha sido reconocida mundialmente
Curso S08 para Cavernícolas Tema ORIGENES DE LOS MICROCONTROLADORES FREESCALE, 2014 Todos los derechos reservados INTRODUCION Desde sus inicios como Motorola, esta empresa ha sido reconocida mundialmente
Fundamentos de Ethernet. Ing. Camilo Zapata czapata@udea.edu.co Universidad de Antioquia
 Fundamentos de Ethernet. Ing. Camilo Zapata czapata@udea.edu.co Universidad de Antioquia Ethernet es el protocolo del nivel de enlace de datos más utilizado en estos momentos. Se han actualizado los estandares
Fundamentos de Ethernet. Ing. Camilo Zapata czapata@udea.edu.co Universidad de Antioquia Ethernet es el protocolo del nivel de enlace de datos más utilizado en estos momentos. Se han actualizado los estandares
BUSES GRUPO 8 Miguel París Dehesa Ricardo Sánchez Arroyo
 BUSES GRUPO 8 Miguel París Dehesa Ricardo Sánchez Arroyo - Trabajo de ampliación. BUSES. - 1 INDICE 1. Introducción 2. Integrated Drive Electronics (IDE) (1986) 3. Universal Serial Bus (USB) (1996) 4.
BUSES GRUPO 8 Miguel París Dehesa Ricardo Sánchez Arroyo - Trabajo de ampliación. BUSES. - 1 INDICE 1. Introducción 2. Integrated Drive Electronics (IDE) (1986) 3. Universal Serial Bus (USB) (1996) 4.
Universidad Autónoma de Baja California Facultad de Ingeniería Mexicali
 Sumadores En este documento se describe el funcionamiento del circuito integrado 7483, el cual implementa un sumador binario de 4 bits. Adicionalmente, se muestra la manera de conectarlo con otros dispositivos
Sumadores En este documento se describe el funcionamiento del circuito integrado 7483, el cual implementa un sumador binario de 4 bits. Adicionalmente, se muestra la manera de conectarlo con otros dispositivos
I.P.E.T. Nº49 -"Domingo Faustino Sarmiento"-Villa Maria - Córdoba Electrónica Digital II 5to Año Electrónica Año 2013
 PLANIFICACIÓN DE: ELECTRÓNICA DIGITAL II CURSO: QUINTO AÑO - ELECTRÓNICA AÑO LECTIVO: 2013 HORAS SEMANALES: 4 (CUATRO) PROFESOR: INGENIERO JOSÉ MARIA GUTIÉRREZ OBJETIVOS GENERALES Reconocer y manejar los
PLANIFICACIÓN DE: ELECTRÓNICA DIGITAL II CURSO: QUINTO AÑO - ELECTRÓNICA AÑO LECTIVO: 2013 HORAS SEMANALES: 4 (CUATRO) PROFESOR: INGENIERO JOSÉ MARIA GUTIÉRREZ OBJETIVOS GENERALES Reconocer y manejar los
Capítulo Comunicaciones de datos 1. Conexión de dos unidades 2. Conectando la unidad con una computadora personal
 Capítulo Comunicaciones de datos Este capítulo describe todo lo que necesita saber para poder transferir programas entre la fx-7400g PLUS y ciertos modelos de calculadoras científicas gráficas CASIO, que
Capítulo Comunicaciones de datos Este capítulo describe todo lo que necesita saber para poder transferir programas entre la fx-7400g PLUS y ciertos modelos de calculadoras científicas gráficas CASIO, que
INTRODUCCION. Ing. Camilo Zapata czapata@udea.edu.co Universidad de Antioquia
 INTRODUCCION. Ing. Camilo Zapata czapata@udea.edu.co Universidad de Antioquia Qué es una Red? Es un grupo de computadores conectados mediante cables o algún otro medio. Para que? compartir recursos. software
INTRODUCCION. Ing. Camilo Zapata czapata@udea.edu.co Universidad de Antioquia Qué es una Red? Es un grupo de computadores conectados mediante cables o algún otro medio. Para que? compartir recursos. software
Tema 7. SISTEMAS SECUENCIALES SISTEMAS SECUENCIALES SÍNCRONOS
 Fundamentos de Computadores. Sistemas Secuenciales. T7-1 INDICE: Tema 7. SISTEMAS SECUENCIALES INTRODUCCIÓN SISTEMAS SECUENCIALES SÍNCRONOS TIPOS DE BIESTABLES o TABLAS DE ECITACIÓN DE LOS BIESTABLES o
Fundamentos de Computadores. Sistemas Secuenciales. T7-1 INDICE: Tema 7. SISTEMAS SECUENCIALES INTRODUCCIÓN SISTEMAS SECUENCIALES SÍNCRONOS TIPOS DE BIESTABLES o TABLAS DE ECITACIÓN DE LOS BIESTABLES o
Define las propiedades del medio físico de transición. Un ejemplo es: CABLES, CONECTORES Y VOLTAJES.
 MODELO DE INTERCONEXION DE OSI. También conocido como el modelo de 7 capas. Define los métodos y protocolos necesarios para conectar una computadora a cualquier parte de la red. Para facilitar el envío
MODELO DE INTERCONEXION DE OSI. También conocido como el modelo de 7 capas. Define los métodos y protocolos necesarios para conectar una computadora a cualquier parte de la red. Para facilitar el envío
Actividad 4: Comunicación entre PLC s vía Ethernet
 Actividad 4: Comunicación entre PLC s vía Ethernet 1.- Listado de materiales: PC con Tarjeta de red 3com o similar. 2 PLC Omrom CJ1M CPU11 ETN Estos autómatas llevan integrada la tarjeta de comunicaciones
Actividad 4: Comunicación entre PLC s vía Ethernet 1.- Listado de materiales: PC con Tarjeta de red 3com o similar. 2 PLC Omrom CJ1M CPU11 ETN Estos autómatas llevan integrada la tarjeta de comunicaciones
Unidad 1: Conceptos generales de Sistemas Operativos.
 Unidad 1: Conceptos generales de Sistemas Operativos. Tema 2: Estructura de los sistemas de computación. 2.1 Funcionamiento de los sistemas de computación. 2.2 Ejecución de instrucciones e interrupciones
Unidad 1: Conceptos generales de Sistemas Operativos. Tema 2: Estructura de los sistemas de computación. 2.1 Funcionamiento de los sistemas de computación. 2.2 Ejecución de instrucciones e interrupciones
INGENIERIA EN MICROCONTROLADORES. Protocolo RS-485. Introducción
 INGENIERIA EN MICROCONTROLADORES Protocolo RS-485 Introducción P R O T O C O L O R S - 4 8 5 www.i-micro.com Ingeniería en Microcontroladores Teléfono 044 55 11 29 55 05 E-mail: cursos@i-micro.com elp@i-micro.com
INGENIERIA EN MICROCONTROLADORES Protocolo RS-485 Introducción P R O T O C O L O R S - 4 8 5 www.i-micro.com Ingeniería en Microcontroladores Teléfono 044 55 11 29 55 05 E-mail: cursos@i-micro.com elp@i-micro.com
Capa de TRANSPORTE. Ing. José Martín Calixto Cely Original: Galo Valencia P.
 Capa de TRANSPORTE Ing. José Martín Calixto Cely Original: Galo Valencia P. Capa de Transporte La Capa 1 crea y transporta las corrientes de bits; La Capa 2 encapsula los paquetes de datos en tramas, y
Capa de TRANSPORTE Ing. José Martín Calixto Cely Original: Galo Valencia P. Capa de Transporte La Capa 1 crea y transporta las corrientes de bits; La Capa 2 encapsula los paquetes de datos en tramas, y
Placa de control MCC03
 Placa de control MCC03 Placa de control MCC03 La placa de control basada en el micro controlador PIC 16F874A de Microchip, es la encargada del procesar los datos que se introducen en el sistema y actuar
Placa de control MCC03 Placa de control MCC03 La placa de control basada en el micro controlador PIC 16F874A de Microchip, es la encargada del procesar los datos que se introducen en el sistema y actuar
TEMA: PROTOCOLOS TCP/IP
 TEMA: PROTOCOLOS TCP/IP HISTORIA: El Protocolo de Internet (IP) y el Protocolo de Transmisión (TCP), fueron desarrollados inicialmente en 1973 por el informático estadounidense Vinton Cerf como parte de
TEMA: PROTOCOLOS TCP/IP HISTORIA: El Protocolo de Internet (IP) y el Protocolo de Transmisión (TCP), fueron desarrollados inicialmente en 1973 por el informático estadounidense Vinton Cerf como parte de
2º CURSO INGENIERÍA TÉCNICA EN INFORMÁTICA DE GESTIÓN TEMA 5 ENTRADA/SALIDA. JOSÉ GARCÍA RODRÍGUEZ JOSÉ ANTONIO SERRA PÉREZ Tema 5.
 ARQUITECTURAS DE COMPUTADORES 2º CURSO INGENIERÍA TÉCNICA EN INFORMÁTICA DE GESTIÓN TEMA 5 ENTRADA/SALIDA JOSÉ GARCÍA RODRÍGUEZ JOSÉ ANTONIO SERRA PÉREZ Tema 5. Unidad de E/S 1 Unidad de E/S Indice Introducción.
ARQUITECTURAS DE COMPUTADORES 2º CURSO INGENIERÍA TÉCNICA EN INFORMÁTICA DE GESTIÓN TEMA 5 ENTRADA/SALIDA JOSÉ GARCÍA RODRÍGUEZ JOSÉ ANTONIO SERRA PÉREZ Tema 5. Unidad de E/S 1 Unidad de E/S Indice Introducción.
Arquitectura Von Neumann
 Arquitectura Von Neumann Arquitectura Von Neumann Establecida en 1945 por Von Neumann Modelo básico de arquitectura utilizado en la mayoría de los computadores Su idea es la de conectar permanentemente
Arquitectura Von Neumann Arquitectura Von Neumann Establecida en 1945 por Von Neumann Modelo básico de arquitectura utilizado en la mayoría de los computadores Su idea es la de conectar permanentemente
TEMA 3: Buses, puertos e interfaces
 TEMA 3: Buses, puertos e interfaces Contenidos 1. Introducción. de buses. 3. Jerarquía de buses. 4. Ejemplos de buses. 5. Puertos e interfaces. 6. Ejemplos de puertos e interfaces. Periféricos de Computadores
TEMA 3: Buses, puertos e interfaces Contenidos 1. Introducción. de buses. 3. Jerarquía de buses. 4. Ejemplos de buses. 5. Puertos e interfaces. 6. Ejemplos de puertos e interfaces. Periféricos de Computadores
Interfaz WISHBONE ...
 Interfaz WISHBONE... 2 Interfaz WISHBONE Interfaz WISHBONE 3 Introducción... El presente documento resume los aspectos más importantes de la Revision B.3 de la especificación WISHBONE. El objetivo de la
Interfaz WISHBONE... 2 Interfaz WISHBONE Interfaz WISHBONE 3 Introducción... El presente documento resume los aspectos más importantes de la Revision B.3 de la especificación WISHBONE. El objetivo de la
Introducción a los FPGAs y el Cómputo Reconfigurable Miguel Morales Sandoval INAOE, 2006
 Introducción a los FPGAs y el Cómputo Reconfigurable Miguel Morales Sandoval INAOE, 2006 Qué son los FPGAs? Matriz de bloques lógicos configurables (CLB) y una matriz de interconexión. Los bloques lógicos
Introducción a los FPGAs y el Cómputo Reconfigurable Miguel Morales Sandoval INAOE, 2006 Qué son los FPGAs? Matriz de bloques lógicos configurables (CLB) y una matriz de interconexión. Los bloques lógicos
TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO
 TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO Introducción.- Asanza,V 1 ; Laica,J 1 ; Paillacho,D 1 1. Centro de Visión y Robotica {vasanza, jlaica, dpailla} @fiec.espol.edu.ec Un
TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO Introducción.- Asanza,V 1 ; Laica,J 1 ; Paillacho,D 1 1. Centro de Visión y Robotica {vasanza, jlaica, dpailla} @fiec.espol.edu.ec Un
USB (Universal Serial Bus)
") USB (Universal Serial Bus) USB es una interfaz para transmisión de datos y distribución de energía que ha sido introducida en el mercado de PC s y periféricos para mejorar las lentas interfaces serie (RS-232)
USB (Universal Serial Bus) USB es una interfaz para transmisión de datos y distribución de energía que ha sido introducida en el mercado de PC s y periféricos para mejorar las lentas interfaces serie (RS-232)
En el presente capítulo se describe la programación del instrumento virtual y cómo
 Capítulo 6. Instrumentación virtual En el presente capítulo se describe la programación del instrumento virtual y cómo éste controla el circuito de captura de señales, la llamada telefónica y escribe los
Capítulo 6. Instrumentación virtual En el presente capítulo se describe la programación del instrumento virtual y cómo éste controla el circuito de captura de señales, la llamada telefónica y escribe los
Tema 1 Introducción. Arquitectura básica y Sistemas Operativos. Fundamentos de Informática
 Tema 1 Introducción. Arquitectura básica y Sistemas Operativos Fundamentos de Informática Índice Descripción de un ordenador Concepto básico de Sistema Operativo Codificación de la información 2 1 Descripción
Tema 1 Introducción. Arquitectura básica y Sistemas Operativos Fundamentos de Informática Índice Descripción de un ordenador Concepto básico de Sistema Operativo Codificación de la información 2 1 Descripción
Transporte de Datos. Profesora María Elena Villapol. Comunicación de Datos
 Modos de Conmutación en el Transporte de Datos Profesora María Elena Villapol Redes Conmutadas Dos usuarios finales no tienen un camino permanente y dedicado entre ellos. El camino se establece cuando
Modos de Conmutación en el Transporte de Datos Profesora María Elena Villapol Redes Conmutadas Dos usuarios finales no tienen un camino permanente y dedicado entre ellos. El camino se establece cuando
4. Programación Paralela
 4. Programación Paralela La necesidad que surge para resolver problemas que requieren tiempo elevado de cómputo origina lo que hoy se conoce como computación paralela. Mediante el uso concurrente de varios
4. Programación Paralela La necesidad que surge para resolver problemas que requieren tiempo elevado de cómputo origina lo que hoy se conoce como computación paralela. Mediante el uso concurrente de varios
5.5 Interfaces especiales. 5.5.1 Interfaz V.24. Norma V.24. neris 4/8/64
 5.5 Interfaces especiales 5.5.1 Interfaz V.24 Norma V.24 V.24 es una interfaz serie utilizada para la conexión con una impresora o PC. De acuerdo con la recomendación V.24, una extensión de cable de 15
5.5 Interfaces especiales 5.5.1 Interfaz V.24 Norma V.24 V.24 es una interfaz serie utilizada para la conexión con una impresora o PC. De acuerdo con la recomendación V.24, una extensión de cable de 15
Winide y Kit EVALQTY CDM 2011
 Winide y Kit EVALQTY CDM 2011 Seteo de jumpers jumpers JUMPER : JP1 Selección de la Tensión de Alimentación al MCU. JP1 en posición 1-2 VDD = 5Vdc JP1 en posición 2-3 VDD = 3Vdc (MCU alimentado con 3Vdc)
Winide y Kit EVALQTY CDM 2011 Seteo de jumpers jumpers JUMPER : JP1 Selección de la Tensión de Alimentación al MCU. JP1 en posición 1-2 VDD = 5Vdc JP1 en posición 2-3 VDD = 3Vdc (MCU alimentado con 3Vdc)
GENERADOR DE SECUENCIAS PROGRAMADAS PARA LA VERIFICACIÓN DE SISTEMAS DIGITALES GSProg
 GENERADOR DE SECUENCIAS PROGRAMADAS PARA LA VERIFICACIÓN DE SISTEMAS DIGITALES GSProg JOSE LUIS SALAZAR MONTES GABRIEL ALEJANDRO TOVAR TORRES PONTIFICIA UNIVERSIDAD JAVERIANA FACULTAD DE INGENIERÍA CARRERA
GENERADOR DE SECUENCIAS PROGRAMADAS PARA LA VERIFICACIÓN DE SISTEMAS DIGITALES GSProg JOSE LUIS SALAZAR MONTES GABRIEL ALEJANDRO TOVAR TORRES PONTIFICIA UNIVERSIDAD JAVERIANA FACULTAD DE INGENIERÍA CARRERA
Trabajo 3. PROTOCOLOS DE COMUNICACIÓN SERIAL INDUSTRIALES Edwin Gilberto Carreño Lozano, Código: 2090454.
 Trabajo 3. PROTOCOLOS DE COMUNICACIÓN SERIAL INDUSTRIALES Edwin Gilberto Carreño Lozano, Código: 2090454. I. OBJETIVO Hacer un resumen acerca de los protocolos RS232, RS485, RS422 y HART; protocolos de
Trabajo 3. PROTOCOLOS DE COMUNICACIÓN SERIAL INDUSTRIALES Edwin Gilberto Carreño Lozano, Código: 2090454. I. OBJETIVO Hacer un resumen acerca de los protocolos RS232, RS485, RS422 y HART; protocolos de
ELECTRONICA ESTUDIO MODULO TRASMISOR-RECEPTOR DE RF A RS232 BIDIRECCIONAL Clave: 875
 ELECTRONICA ESTUDIO MODULO TRASMISOR-RECEPTOR DE RF A RS232 BIDIRECCIONAL Clave: 875 www.electronicaestudio.com Guía de Operación E L E C T R O N I C A E S T U D I O Modulo Transmisor-Receptor de RF a
ELECTRONICA ESTUDIO MODULO TRASMISOR-RECEPTOR DE RF A RS232 BIDIRECCIONAL Clave: 875 www.electronicaestudio.com Guía de Operación E L E C T R O N I C A E S T U D I O Modulo Transmisor-Receptor de RF a
DESCRIPCION DEL SITEMA MASTER.
 DESCRIPCION DEL SITEMA MASTER. ESTRUCTURA. El sistema MASTER (Sistema Modular para Control Adaptativo en Tiempo Real) se ha implementado en base a un computador compatible PC-AT, dotado de una tarjeta
DESCRIPCION DEL SITEMA MASTER. ESTRUCTURA. El sistema MASTER (Sistema Modular para Control Adaptativo en Tiempo Real) se ha implementado en base a un computador compatible PC-AT, dotado de una tarjeta
SISTEMAS DE INFORMACIÓN II TEORÍA
 CONTENIDO: EL PROCESO DE DISEÑO DE SISTEMAS DISTRIBUIDOS MANEJANDO LOS DATOS EN LOS SISTEMAS DISTRIBUIDOS DISEÑANDO SISTEMAS PARA REDES DE ÁREA LOCAL DISEÑANDO SISTEMAS PARA ARQUITECTURAS CLIENTE/SERVIDOR
CONTENIDO: EL PROCESO DE DISEÑO DE SISTEMAS DISTRIBUIDOS MANEJANDO LOS DATOS EN LOS SISTEMAS DISTRIBUIDOS DISEÑANDO SISTEMAS PARA REDES DE ÁREA LOCAL DISEÑANDO SISTEMAS PARA ARQUITECTURAS CLIENTE/SERVIDOR
Anexo B. Comunicaciones entre mc y PC
 Anexo B Comunicaciones entre mc y PC En este apartado se hará hincapié en los comandos para el manejo del módulo de comunicaciones desde el PC. Conociendo estos comando se podrá realizar una aplicación
Anexo B Comunicaciones entre mc y PC En este apartado se hará hincapié en los comandos para el manejo del módulo de comunicaciones desde el PC. Conociendo estos comando se podrá realizar una aplicación
No se requiere que los discos sean del mismo tamaño ya que el objetivo es solamente adjuntar discos.
 RAIDS MODO LINEAL Es un tipo de raid que muestra lógicamente un disco pero se compone de 2 o más discos. Solamente llena el disco 0 y cuando este está lleno sigue con el disco 1 y así sucesivamente. Este
RAIDS MODO LINEAL Es un tipo de raid que muestra lógicamente un disco pero se compone de 2 o más discos. Solamente llena el disco 0 y cuando este está lleno sigue con el disco 1 y así sucesivamente. Este
Practica de Control y Programación de Robots ROBOT HERMES. Curso 2007-2008
 Practica de Control y Programación de Robots ROBOT HERMES Curso 2007-2008 CAMPUS TECNOLÓGICO DE LA UNIVERSIDAD DE NAVARRA NAFARROAKO UNIBERTSITATEKO CAMPUS TEKNOLOGIKOA Paseo de Manuel Lardizábal 13. 20018
Practica de Control y Programación de Robots ROBOT HERMES Curso 2007-2008 CAMPUS TECNOLÓGICO DE LA UNIVERSIDAD DE NAVARRA NAFARROAKO UNIBERTSITATEKO CAMPUS TEKNOLOGIKOA Paseo de Manuel Lardizábal 13. 20018
CeTAD (Centro de Técnicas Analógico Digitales) Facultad de Ingeniería Universidad Nacional de La Plata
 Facultad de Ingeniería Universidad Nacional de La Plata") CeTAD (Centro de Técnicas Analógico Digitales) Facultad de Ingeniería Universidad Nacional de La Plata Contacto: jorge.osio@ing.unlp.edu.ar 29/08/2012 Autores: Ing. Luis Antonini - Ing. Jorge Osio 1 Temario
CeTAD (Centro de Técnicas Analógico Digitales) Facultad de Ingeniería Universidad Nacional de La Plata Contacto: jorge.osio@ing.unlp.edu.ar 29/08/2012 Autores: Ing. Luis Antonini - Ing. Jorge Osio 1 Temario
T5.- Redes de datos. TEMA 5 REDES DE DATOS. 1.1.- Elementos de la comunicación. 1.1.- Elementos de la comunicación.
 TECNOLOGÍAS DE LA INFORMACIÓN Y LA COMUNICACIÓN. TEMA 5 REDES DE DATOS. 1.1.- Elementos de la comunicación. 1.2.- Vías de comunicación. 1.3.- Componentes hardware de una red. 1.1.- Elementos de la comunicación.
TECNOLOGÍAS DE LA INFORMACIÓN Y LA COMUNICACIÓN. TEMA 5 REDES DE DATOS. 1.1.- Elementos de la comunicación. 1.2.- Vías de comunicación. 1.3.- Componentes hardware de una red. 1.1.- Elementos de la comunicación.
NOTA DE APLICACIÓN AN-P002. Programando Wiring con NXProg
 NOTA DE APLICACIÓN AN-P002 Programando Wiring con NXProg Este documento se encuentra protegido por una licencia Creative Commons Creative Commons: Atribution, Non-commercial, Share Alike Atribución: Puede
NOTA DE APLICACIÓN AN-P002 Programando Wiring con NXProg Este documento se encuentra protegido por una licencia Creative Commons Creative Commons: Atribution, Non-commercial, Share Alike Atribución: Puede
Análisis general de un Microprocesador
 Análisis general de un Microprocesador Arquitectura del chip Repertorio de instrucciones Sistema mínimo Señales de control Función de cada pin del µp Herramientas de desarrollo Performance. ARQUITECTURA
Análisis general de un Microprocesador Arquitectura del chip Repertorio de instrucciones Sistema mínimo Señales de control Función de cada pin del µp Herramientas de desarrollo Performance. ARQUITECTURA
Interfaces UART. Comunicaciones en un bus serie. Curso Intensivo de Sistemas Embebidos Febrero 2011 Ing. Pablo Martín Gomez
 Comunicaciones en un bus serie Interfaces Curso Intensivo de Sistemas Embebidos Febrero 2011 Ing. Pablo Martín Gomez 1 2 UART Universal Asynchronous Receiver Transmitter Estándar de comunicación implementado
Comunicaciones en un bus serie Interfaces Curso Intensivo de Sistemas Embebidos Febrero 2011 Ing. Pablo Martín Gomez 1 2 UART Universal Asynchronous Receiver Transmitter Estándar de comunicación implementado
PUERTOS DE ENTRADA Y SALIDA
 PUERTOS DE ENTRADA Y SALIDA El microcontrolador Z8 PLUS dedica 14 líneas para puertos de entrada y salida. Estas líneas están agrupadas en dos puertos conocidos como el Puerto A y el Puerto B. El puerto
PUERTOS DE ENTRADA Y SALIDA El microcontrolador Z8 PLUS dedica 14 líneas para puertos de entrada y salida. Estas líneas están agrupadas en dos puertos conocidos como el Puerto A y el Puerto B. El puerto
TEMA 4. Unidades Funcionales del Computador
 TEMA 4 Unidades Funcionales del Computador Álvarez, S., Bravo, S., Departamento de Informática y automática Universidad de Salamanca Introducción El elemento físico, electrónico o hardware de un sistema
TEMA 4 Unidades Funcionales del Computador Álvarez, S., Bravo, S., Departamento de Informática y automática Universidad de Salamanca Introducción El elemento físico, electrónico o hardware de un sistema
TELECOMUNICACIONES Y REDES
 TELECOMUNICACIONES Y REDES Redes Computacionales I Prof. Cristian Ahumada V. Unidad VII: Capa de Enlace de Datos Contenido 1. Introducción. 2. Acceso al Medio. 3. Técnicas de Control de acceso al medio.
TELECOMUNICACIONES Y REDES Redes Computacionales I Prof. Cristian Ahumada V. Unidad VII: Capa de Enlace de Datos Contenido 1. Introducción. 2. Acceso al Medio. 3. Técnicas de Control de acceso al medio.
En los años 60, cada fabricante usaba una interfaz diferente para comunicar un DTE
 Historia En los años 60, cada fabricante usaba una interfaz diferente para comunicar un DTE (Data Terminal Equipment) y un DCE (Data Communications Equipment). Cables, conectores y niveles de voltaje eran
Historia En los años 60, cada fabricante usaba una interfaz diferente para comunicar un DTE (Data Terminal Equipment) y un DCE (Data Communications Equipment). Cables, conectores y niveles de voltaje eran
El Modelo de Referencia OSI
 El Modelo de Referencia OSI Tabla de Contenidos 2. El Modelo de Referencia OSI... 2 2.1 Nivel físico...4 2.2 Nivel de enlace... 4 2.3 Nivel de red... 5 2.4 Nivel de transporte...5 2.5 Nivel de sesión...
El Modelo de Referencia OSI Tabla de Contenidos 2. El Modelo de Referencia OSI... 2 2.1 Nivel físico...4 2.2 Nivel de enlace... 4 2.3 Nivel de red... 5 2.4 Nivel de transporte...5 2.5 Nivel de sesión...
Clase 20: Arquitectura Von Neuman
 http://computacion.cs.cinvestav.mx/~efranco @efranco_escom efranco.docencia@gmail.com Estructuras de datos (Prof. Edgardo A. Franco) 1 Contenido Arquitectura de una computadora Elementos básicos de una
http://computacion.cs.cinvestav.mx/~efranco @efranco_escom efranco.docencia@gmail.com Estructuras de datos (Prof. Edgardo A. Franco) 1 Contenido Arquitectura de una computadora Elementos básicos de una
Práctica 2NivelFisico: Estudio del nivel físico en la RS232 y en la RS485
 Práctica 2NivelFisico: Estudio del nivel físico en la y en la RS485 1 Objetivos El objetivo de esta práctica es el estudio físico de la y de la RS485 y su relación cuando conviven en un mismo sistema.
Práctica 2NivelFisico: Estudio del nivel físico en la y en la RS485 1 Objetivos El objetivo de esta práctica es el estudio físico de la y de la RS485 y su relación cuando conviven en un mismo sistema.
Información sobre seguridad
 Información sobre seguridad SMART kapp incluye características de protección de datos diseñadas para mantener el contenido controlador de forma predecible. En esta página se explican las características
Información sobre seguridad SMART kapp incluye características de protección de datos diseñadas para mantener el contenido controlador de forma predecible. En esta página se explican las características
Parámetros de configuración de la conexión Ethernet para mensajería
 Parámetros de configuración de la conexión para mensajería Introducción Este campo se utiliza para lo siguiente: - configurar el número de conexiones que se pueden abrir mediante el módulo - activar la
Parámetros de configuración de la conexión para mensajería Introducción Este campo se utiliza para lo siguiente: - configurar el número de conexiones que se pueden abrir mediante el módulo - activar la
Conexión inalámbrica a un CNC (con puerto Serie RS232C)
") Conexión inalámbrica a un CNC (con puerto Serie RS232C) A continuación se describe como conectar un CNC con puerto serie RS232C a un PC a través de una red inalámbrica (o Ethernet) El puerto serie RS232C
Conexión inalámbrica a un CNC (con puerto Serie RS232C) A continuación se describe como conectar un CNC con puerto serie RS232C a un PC a través de una red inalámbrica (o Ethernet) El puerto serie RS232C
Protocolo ADAT / Guía de Conexión
 www.ieeelectronics.net Protocolo ADAT / Guía de Conexión El protocolo ADAT es un protocolo heredado de los años 90, fue implementado por la marca Alesis para sus grabadoras de audio digital en cinta ADAT
www.ieeelectronics.net Protocolo ADAT / Guía de Conexión El protocolo ADAT es un protocolo heredado de los años 90, fue implementado por la marca Alesis para sus grabadoras de audio digital en cinta ADAT
Concentradores de cableado
 Concentradores de cableado Un concentrador es un dispositivo que actúa como punto de conexión central entre los nodos que componen una red. Los equipos conectados al propio concentrador son miembros de
Concentradores de cableado Un concentrador es un dispositivo que actúa como punto de conexión central entre los nodos que componen una red. Los equipos conectados al propio concentrador son miembros de
Unidad II Conmutación.
 Unidad II Conmutación. 2 Multicanalización (Frecuencia, Tiempo) Multiplexación. Se le llama al conjunto de técnicas que permiten la transmisión simultánea de múltiples señales a través de un solo enlace
Unidad II Conmutación. 2 Multicanalización (Frecuencia, Tiempo) Multiplexación. Se le llama al conjunto de técnicas que permiten la transmisión simultánea de múltiples señales a través de un solo enlace
La informática es el conjunto de técnicas y conocimientos necesarios para el tratamiento automático de la información mediante el ordenador.
 Qué es la informática? La informática es el conjunto de técnicas y conocimientos necesarios para el tratamiento automático de la información mediante el ordenador. Se llama sistema informático al sistema
Qué es la informática? La informática es el conjunto de técnicas y conocimientos necesarios para el tratamiento automático de la información mediante el ordenador. Se llama sistema informático al sistema
DISCOS RAID. Se considera que todos los discos físicos tienen la misma capacidad, y de no ser así, en el que sea mayor se desperdicia la diferencia.
 DISCOS RAID Raid: redundant array of independent disks, quiere decir conjunto redundante de discos independientes. Es un sistema de almacenamiento de datos que utiliza varias unidades físicas para guardar
DISCOS RAID Raid: redundant array of independent disks, quiere decir conjunto redundante de discos independientes. Es un sistema de almacenamiento de datos que utiliza varias unidades físicas para guardar
CAPITULO V. REDES INDUSTRIALES
 150 CAPITULO V. REDES INDUSTRIALES En principio una red se puede definir como una serie de estaciones (Nodos) o equipos interconectados entre sí, para tener información más común disponible en uno, varios
150 CAPITULO V. REDES INDUSTRIALES En principio una red se puede definir como una serie de estaciones (Nodos) o equipos interconectados entre sí, para tener información más común disponible en uno, varios
Protocolo de Capa Física y Modems
 FIU (Prof. María Feldgen) 1 75.43 Introducción a los Sistemas Distribuidos FIU Protocolo de Capa Física y Modems Prof. María Feldgen Tema: Protocolo de Capa Fïsica y Modems Prof. María Feldgen 1 Protocolo
FIU (Prof. María Feldgen) 1 75.43 Introducción a los Sistemas Distribuidos FIU Protocolo de Capa Física y Modems Prof. María Feldgen Tema: Protocolo de Capa Fïsica y Modems Prof. María Feldgen 1 Protocolo
Protocolo PPP PPP Protocolo de Internet de línea serie (SLIP)
") Protocolo PPP 1 PPP Hoy en día, millones de usuarios necesitan conectar sus computadoras desde su asa a las computadoras de un proveedor de Internet para acceder a Internet También hay muchas personas
Protocolo PPP 1 PPP Hoy en día, millones de usuarios necesitan conectar sus computadoras desde su asa a las computadoras de un proveedor de Internet para acceder a Internet También hay muchas personas
Manual del Software. por Raúl Milla Pérez www.arcan.es
 SW Manual del Software por Raúl Milla Pérez www.arcan.es Indice La librería Método: init Método: check_message Método: byte get_message Método: boolean check_free_buffer Método: byte send_message Método:
SW Manual del Software por Raúl Milla Pérez www.arcan.es Indice La librería Método: init Método: check_message Método: byte get_message Método: boolean check_free_buffer Método: byte send_message Método:
HARDWARE DE SISTEMA AUTOMÁTICO DE RASTREO DE VEHÍCULOS MEDIANTE TECNOLOGÍAS GPRS Y GPS
 HARDWARE DE SISTEMA AUTOMÁTICO DE RASTREO DE VEHÍCULOS MEDIANTE TECNOLOGÍAS GPRS Y GPS Ing. Javier A. Garabello Facultad Regional Villa María UTN Av. Universidad 450 Tel: 0353-4537500 javiergarabello@hotmail.com
HARDWARE DE SISTEMA AUTOMÁTICO DE RASTREO DE VEHÍCULOS MEDIANTE TECNOLOGÍAS GPRS Y GPS Ing. Javier A. Garabello Facultad Regional Villa María UTN Av. Universidad 450 Tel: 0353-4537500 javiergarabello@hotmail.com
Protocolo USB CDM 2012. 22/11/2012 Autor: Ing. Jorge R. Osio 1
 Protocolo USB CDM 2012 1 Temario Prestaciones del protocolo Principales características Elementos de una transferencia USB Enumeración de dispositivos 2 Prestaciones del protocolo Soporta variedad de dispositivos
Protocolo USB CDM 2012 1 Temario Prestaciones del protocolo Principales características Elementos de una transferencia USB Enumeración de dispositivos 2 Prestaciones del protocolo Soporta variedad de dispositivos
Fecha: 21/01/a2007 Página 1 / 11
 Fecha: 21/01/a2007 Página 1 / 11 MODBUS. Ejemplo básico de configuración. OBJETIVO Esta nota técnica proporciona las líneas de programa y los ajustes necesarios para configurar la siguiente red MODBUS.
Fecha: 21/01/a2007 Página 1 / 11 MODBUS. Ejemplo básico de configuración. OBJETIVO Esta nota técnica proporciona las líneas de programa y los ajustes necesarios para configurar la siguiente red MODBUS.