Definición Clasificación de los modelos geométricos Modelo alámbrico Modelos superficiales Modelos sólidos Otros modelos
|
|
|
- Asunción Botella Villalobos
- hace 6 años
- Vistas:
Transcripción


1 Tema 5
2 Indice Definición Clasificación de los modelos geométricos Modelo alámbrico Modelos superficiales Modelos sólidos Otros modelos 2
3 Definiciones Def : Conjunto de métodos matemáticos que utilizamos para describir la forma de un objeto y para expresar algunas de sus propiedades físicas. Def 2: Representación de un objeto en forma de descripción matemática y geométrica Def 3: Conjunto de estructuras de datos, algoritmos de manejo de esas estructuras y operaciones disponibles entre las estructuras que dan soporte a la información geométrica correspondiente a un objeto 3
4 Características Las características deseables para todos modelo geométrico son: Preciso No ambiguo Compacto Rápido Util 4
5 Clasificación Modelo Alámbrico Modelos Superficiales Objetos poligonales Superficies Cuádricas y Supercuádricas Isosuperficies Superficies Libres o Paramétricas Modelos Sólidos Instanciación de Primitivas Objetos generados por barrido Enumeración espacial Geometría Sólida Constructiva (CSG) Otros Modelos Modelos de Geometría Fractal Modelos Gramaticales Sistemas de Partículas Modelos Basados en Características Físicas Modelos para Visualización Científica 5
6 Modelo Alámbrico Conceptos Los objetos se representan describiendo vértices y aristas Estructuras de almacenamiento Lista de aristas Lista de aristas y de vértices Arista Inicio Fin A (x, y, z ) (x 2, y 2, z 2 ) A 2 (x 2, y 2, z 2 ) (x 3, y 3, z 3 ) A 3 (x 3, y 3, z 3 ) (x, y, z ) A 4 (x 2, y 2, z 2 ) (x 4, y 4, z 4 ) A 5 (x, y, z ) (x 4, y 4, z 4 ) A 6 (x 4, y 4, z 4 ) (x 3, y 3, z 3 ) A 3 V 3 A 2 A 5 A 6 V A V 2 V 4 A 4 Vértice Coordenadas V (x, y, z ) V 2 (x 2, y 2, z 2 ) V 3 (x 3, y 3, z 3 ) V 4 (x 4, y 4, z 4 ) Arista Inicio Fin A V V 2 A 2 V 2 V 3 A 3 V 3 V A 4 V 2 V 4 A 5 V V 4 A 6 V 4 V 3 6
7 Modelo Alámbrico Características Ventajas Sencillo Visualización muy rápida Inconvenientes Visualización ambigua No permite visualizar superficies ni visualización realista No guarda información sobre puntos interiores/exteriores No guarda información sobre superficies ni sólidos Es aproximado Pueden perderse líneas de silueta Sólo se emplea para visualizaciones preliminares muy rápidas 7
 o curvas (modelo de superficies curvas) Fórmula de Euler-Poincaré:")
 F: nº caras V: nº vértices E: nº aristas R: nº")
8 Modelos Superficiales Conceptos También se llaman B-Rep (Boundary Representation) Los objetos se representan con vértices, aristas y caras Las caras pueden ser planas (modelo poligonal) o curvas (modelo de superficies curvas) Fórmula de Euler-Poincaré: relaciona número de vértices, aristas, caras y agujeros. Asegura que el objeto es un sólido topológicamente correcto F + V E R = 2 (S H) F: nº caras V: nº vértices E: nº aristas R: nº anillos S: nº objetos independientes H: nº agujeros F: 5 V: 24 E: 36 R: 3 S: H: 8
9 Modelos Superficiales. Estructuras de almacenamiento Dos tipos de almacenamiento Listas Aristas aladas Almacenamientos en listas: se definen dos tipos de listas: Listas de geometría almacenan datos geométricos: vértices, aristas, caras, Listas de atributos almacenan otros datos: color, transparencia, material, 9
10 Modelos Superficiales Estructuras de almacenamiento Listas de geometría Sólo una lista de caras: información redundante Lista de caras y vértices Lista de caras, aristas y vértices Mínima redundancia Consistencia de los datos Atributos de caras, aristas y vértices Referencias cruzadas Listas de atributos Propiedades del material Ecuaciones de los planos Ecuaciones de las superf. curvas C 3 A 3 V 3 A 6 A 2 C C A 2 5 V A V 2 C 4 V 4 A 4 Vértice Coord Atributos V (x, y, z ) AtrV V 2 (x 2, y 2, z 2 ) AtrV 2 V 3 (x 3, y 3, z 3 ) AtrV 3 V 4 (x 4, y 4, z 4 ) AtrV 4 Polígono Aristas Atributos C A,A 2,A 3 AtrC C 2 A 2,A 4,A 6 AtrC 2 C 3 A 3,A 6,A 5 AtrC 3 C 4 A,A 5,A 4 AtrC 4 Arista Inicio Fin Atributos A V V 2 AtrA A 2 V 2 V 3 AtrA 2 A 3 V 3 V AtrA 3 A 4 V 2 V 4 AtrA 4 A 5 V V 4 AtrA 5 A 6 V 4 V 3 AtrA 6
11 Modelos Superficiales. Estructuras de almacenamiento Aristas aladas: Grafo no dirigido Los nodos representan vértices y aristas Las uniones entre nodos representan relaciones de incidencia entre aristas y vértices. C 3 V 3 A 6 A 5 A 3 A 2 C C A 2 5 V 4 V 3 A 6 V 4 V A V 2 C 4 A 4 A 3 A 2 A 4 V A V 2
12 Modelos Superficiales. Clasificación de los modelos B-Rep Modelo Poligonal Superficies Cuádricas y Supercuádricas Isosuperficies Superficies Libres Superficies interpoladas Superficies aproximadas 2
13 Modelo Poligonal Definición Las caras son polígonos planos Para almacenarlo: Listas de geometría y atributos Aristas aladas En las listas de atributos se suele almacenar: Normal a cada polígono Ecuación del plano de cada polígono Estos atributos facilitan Prueba de interioridad/exterioridad Cálculo de intersecciones Sombreado y visualización realista 3
14 Modelo Poligonal Ecuación del Plano A partir de 3 puntos del plano (por ejemplo, los vértices del polígono) V, V 2 y V 3 : vértices del polígono A = y (z 2 -z 3 )+y 2 (z 3 -z )+y 3 (z -z 2 ) B = z (x 2 -x 3 )+z 2 (x 3 -x )+z 3 (x -x 2 ) C = x (y 2 -y 3 )+x 2 (y 3 -y )+x 3 (y -y 2 ) D = -x (y 2 z 3 -y 3 z 2 )-x 2 (y 3 z -y z 3 )-x 3 (y z 2 -y 2 z ) Ax + By + Cz + D = 4
15 Modelo Poligonal Normal al Plano Se obtiene como el producto vectorial de dos vectores situados sobre el plano N v 3 N = (v 2 -v ) (v 3 -v ) v v 2 Las componentes de la normal son los coeficientes A, B y C de la ecuación del plano. D se calcula sustituyendo uno de los puntos 5
16 Modelo Poligonal Ecuaciones y Normal La normal se calcula a partir de la ecuación y al revés La normal se utiliza para calcular la iluminación de la cara Para que la normal apunte hacia el exterior, debemos especificar los vértices en sentido antihorario Prueba de interioridad/exterioridad: utilizando la ecuación si Ax+By+Cz+D = (x,y,z) sobre el plano si Ax+By+Cz+D < (x,y,z) dentro del plano si Ax+By+Cz+D > (x,y,z) fuera del plano Los puntos del polígono deben ser coplanares Triangulación 6
17 Modelo Poligonal Características Ventajas Es muy sencillo Visualización rápida (dispositivos aceleradores) Representación exacta para poliedros Visualización no ambigua (utilizando sombreado) Prueba de interioridad/exterioridad sencilla Cálculo de intersecciones sencillo Muy útil como modelo secundario para visualización 7
18 Modelo Poligonal Características Inconvenientes Representación aproximada para objetos no poliédricos Mejores aproximaciones implican un gran aumento del número de polígonos Para convertir otros modelos son necesarios métodos de poligonalización o mallado que pueden ser complejos Altos requerimientos de espacio Algunos cálculos complejos: volúmenes, mecanizado,... 8
19 Sup. Cuádricas y Supercuádricas Definición Objetos descritos mediante ecuaciones cuadráticas Ecuaciones en forma implícita o paramétrica Superficies cuádricas: ecuaciones cuadráticas Esferas Elipsoides Toros Paraboloides Hiperboloides Superficies supercuádricas: ecuaciones cuádraticas generalizadas (con parámetros adicionales) Superelipsoides Superparaboloides,... 9
20 Sup. Cuádricas y Supercuádricas Esfera Ecuación implícita x 2 + y 2 + z 2 = r 2 Ecuación paramétrica x = r cos cos y = r cos sen z = r sen -/2 /2 r - 2
21 Sup. Cuádricas y Supercuádricas Elipsoides Ecuación implícita (x/r x ) 2 + (y/r y ) 2 + (z/r z ) 2 = Ecuación paramétrica x = r x cos cos y = r y cos sen r y z = r z sen -/2 /2 - r z r x 2
22 Ecuación implícita Sup. Cuádricas y Supercuádricas Toro [r - (x/r x ) 2 + (y/r y ) 2 ] 2 + (z/r z ) 2 = r z Ecuación paramétrica x = r x (r-cos )cos y = r y (r+cos )sen z = r z sen r z r x = r y
![Sup. Cuádricas y Supercuádricas Superelipsoide Ecuación implícita [(x/r x ) 2/S 2 + (y/r y ) 2/S 2 ] S 2 /S + (z/r z )](/docs-images/75/72613274/images/23-4.jpg "2/S = Ecuación paramétrica x = r x cos S cos S 2 y = r y cos S sen S 2 z = r z sen S -/2 /2 - S 2.5 2.5.5.5.5 2 2.")
23 Sup. Cuádricas y Supercuádricas Superelipsoide Ecuación implícita [(x/r x ) 2/S 2 + (y/r y ) 2/S 2 ] S 2 /S + (z/r z ) 2/S = Ecuación paramétrica x = r x cos S cos S 2 y = r y cos S sen S 2 z = r z sen S -/2 /2 - S S 2 23

24 Isosuperficies Definición Se definen a partir de un conjunto de primitivas en el espacio que definen un campo de fuerza Isosuperficie: superficie exterior que define el campo de fuerza cuando vale Viene dada por una función de densidad Campo de fuerza = Primitivas 24
25 25 Isosuperficies Tipos Blobs Metaballs Soft Objects k z y x f a k T e b z y x f k k ),, ( ),, ( d r d r d d r b d r d r b r f si, 3 si, si ), 3 ( ) ( d r d r d r d r d r r f ) (
26 Isosuperficies Características Ventajas Muy adecuadas para modelar objetos orgánicos Muy compacto Inconvenientes Difícil modelar objetos con aristas Poligonalización muy compleja 26

27 Isosuperficies Ejemplos 27
28 Superficies Libres Son una extensión de las curvas libres Se trazan a partir de una nube de puntos, por interpolación o aproximación La nube de puntos, ordenada, se denomina poliedro de control Las superficies se definen mediante ecuaciones paramétricas con 2 parámetros (u, v) Es deseable que cumplan algunas propiedades: Continuidad Recubrimiento convexo Invarianza afín 28
29 Superficies Libres De interpolación Hermite Splines De aproximación Bézier BSplines NURBS 29
30 Superficies Libres Superficies por tramos o patches Deseable continuidad Continuidad Paramétrica (C) Deseable C : Los tramos se tocan C : ª derivada coincide C 2 : ª y 2ª derivada coinciden C n : ª, 2ª n-ésima derivada coinciden Continuidad Geométrica (G) Más fácil de conseguir G : Los tramos se tocan G : ª derivada proporcional G 2 : ª y 2ª derivada proporcionales G n : ª, 2ª n-ésima derivada proporcionales 3
31 Superficies Libres Propiedad del Recubrimiento Convexo Es deseable que la superficie se encuentre dentro del recubrimiento convexo formado por el poliedro de control Se cumple cuando la suma de las funciones base es Se cumple para superficies de aproximación 3
32 Superficies Libres Propiedad de Invarianza Afín Es deseable que las superficies sean invariantes a transformaciones afines Una superficie es invariante a transformaciones afines si: Calcular los puntos de la superficie y aplicar la transformación a esos puntos ES EQUIVALENTE A Aplicar la transformación a los puntos de control y luego calcular los puntos de la superficie Todas las superficies que veremos son invariantes a transformaciones afines 32
33 Superficies Libres Formulaciones Condiciones Frontera Condiciones de continuidad de la superficie en su frontera Matriz Característica Matriz característica de coeficientes Funciones Base Ecuación basada en funciones base (blending functions) Puntos extremos: S(,) = P, S(,)=P 2 Derivadas primeras S (,) = D, S (,)=D 2 Derivadas segundas S (,) = E, S (,)=D 2 S ( u, v) U M M V m n caract geom S( u, v) p j, kb j, m( v) Bk, n( u) j k T 33
34 Superficies Libres Grado y Orden de la Superficie Grado = Grado del polinomio que la define Orden = nº de puntos necesarios para cada tramo = Grado + Grado 3 el más habitual Superficies Bicúbicas Hermite Spline Bézier BSpline NURBS Nº de puntos condiciona el grado Para evitarlo Definición por tramos Grado independiente de nº de puntos Superficies completas, no por tramos 34
35 Superficies Libres Superficies Bicúbicas de Hermite Se trata de una extensión de las curvas de Hermite Interpolan una nube de puntos Cada curva sobre la superficie es de Hermite Para definir un tramo bicúbico, necesitamos 4 puntos para las esquinas 35
36 Superficies Libres Superficies Bicúbicas de Hermite Condiciones de frontera Tramos bicúbicos polinomio con 6 coeficientes 3 3 i j S( u, v) aiju v ; u ; v ; i j Condiciones de frontera en los 4 puntos de esquina: Posición de los 4 puntos 4 ecuaciones Derivada con respecto a u (tangente en u) 4 ecuaciones Derivada con respecto a v (tangente en v) 4 ecuaciones Derivada con respecto a u y v (vector torsión) 4 ecuaciones S/u 2 S/uv P, P, S/v P, P, 36
37 Superficies Libres Superficies Bicúbicas de Hermite Matriz Característica Resolviendo el sistema de 6 ecuaciones S(,) = P S(,) = P S(,) = P S(,) = P S(,)/u = D u S(,)/u = D u S(,)/u = D u S(,)/u = D u S(,)/v = D v S(,)/v = D v S(,)/v = D v S(,)/v = D v S 2 (,)/uv = D uv S 2 (,)/uv = D uv S 2 (,)/uv = D uv S 2 (,)/uv = D uv En forma matricial: S ( u, v ) U M M M V Herm Geom T Herm T U u 3 u 2 u ; V T 3 v 2 v ; v M Herm ; M geom P P D D u u P P D D u u D D D D v v uv uv D D D D v v uv uv 37
38 Superficies Libres Superficies Bicúbicas de Hermite Funciones base A partir de la forma matricial: S( u, v) 3 i 3 j b ij F ( u) F i j ( v) b ij = Mgeom ij F i, F j se obtienen a partir de la forma matricial F F F 2 F 3 u/v u/v u/v u/v 38
39 Superficies Libres Superficies Bicúbicas de Hermite Ventajas Formulación sencilla Inconvenientes Necesario especificar tangentes y torsiones Para tramos consecutivos, debe asegurarse la continuidad C No se asegura la continuidad C 2 39
40 Superficies Libres Superficies Bicúbicas de Bézier Se trata de una extensión de las curvas Bézier Aproximan una nube de puntos Cada curva sobre la superficie es una Bézier Para definir un tramo bicúbico, necesitamos 4 x 4 = 6 puntos, cuyas esquinas se interpolan: 4 puntos interiores 4 puntos en las esquinas 8 puntos de frontera 4
41 Superficies Libres Superficies bicúbicas de Bézier Condiciones de frontera Parten del mismo planteamiento que Hermite Las derivadas vienen dadas por los puntos interiores y frontera del poliedro de control S( u, v) 3 i 3 j a ij i u v j ; u ; v ; 2 S/uv S/u S/v 4
42 Matriz característica U u Superficies Libres Superficies Bicúbicas de Bézier Con un planteamiento similar a Hermite, obtenemos 3 u 2 u ; S ( u, v) U M P M V V T 3 v 2 v ; v Bézier T Bézier 3 Equivalencia entre Hermite y Bézier M Bézier ; T P P P P P 2 3 P P P P 2 3 P P P P P P P P M Geom P M M Bézier Herm M M Herm Bézier M P M Geom M T Bézier T Herm T MHerm T M Bézier 42
43 Superficies Libres Superficies Bicúbicas de Bézier Funciones base A partir de la forma matricial: 3 S( u, v) pijbi,3( u) B j, 3 i 3 j ( v) p ij = Puntos de control B i,3, N j,3 : Func. base de grado 3 B i, n ( u) n i i ni u ( u) B,3 B,3 B 2,3 B 3,3 u/v u/v u/v u/v 43

44 Superficies Libres Superficies Bicúbicas de Bézier Ventajas No es necesario especificar tangentes y torsiones Continuidad G entre tramos: Puntos frontera y adyacentes coplanares Inconvenientes El grado varía según el número de puntos Para mantener el grado, debe especificarse por tramos Difícil conseguir continuidad C, G 2 y C 2 44
45 Superficies Libres Superficies Bicúbicas B-Spline Se trata de una extensión de las curvas BSpline Aproximan una nube de puntos Cada curva sobre la superficie es una BSpline El grado es independiente del número de puntos Para definir una superficie bicúbica, necesitamos al menos 4 x 4 = 6 puntos, aunque pueden ser más (no hay tramos) Las esquinas pueden o no interpolarse Para 4 x 4 puntos, interpolando las esquinas, BSpline = Bézier 45
46 Funciones base m n S( u, v) pijni, K ( u) N j, i j Superficies Libres Superficies Bicúbicas B-Spline L ( v) p ij = Puntos de control K, L = Grado en sentido u y v (es 3) N i,k, N j,l : Func. base de grado K y L N i, ( u) si t i u t i en otro caso N i, k ( u) ( u t t i ) N i k i, k t i ( u) ( t i k u) N t i k t i, k i ( u) t i = nodos, con i =,, n+k N,3 N,3 N 2,3 N 3,3 u/v u/v u/v u/v 46
47 Matriz Característica Planteamiento similar a Bézier Superficies Libres Superficies Bicúbicas B-Spline S ( u, v) U M P M V BSpline T BSpline T U u 3 u 2 u ; V T 3 v 2 v v ; M BSpline P3 P3 P32 Las superficies BSpline pueden escribirse en forma de un conjunto de tramos de superficie Bézier ; P P P P 2 P P P 2 P P P P P P P
48 Superficies Libres Superficies Bicúbicas B-Spline Ventajas La ecuación especifica una superficie completa No se especifican tramos, ni tangentes, ni torsiones. Sólo se especifican puntos de control Continuidad intrínseca C 2 para superficies BSpline, independientemente del número de puntos de control Modificación local: la modificación de un punto de control afecta a una porción pequeña de superficie Inconvenientes Formulación más compleja que en casos anteriores No se pueden especificar superficies cónicas 48
49 Superficies Libres Superficies Bicúbicas NURBS NURBS = Non Uniform Rational BSpline Se trata de una extensión de las curvas NURBS, y por tanto son un caso general de las superficies BSpline Como las BSpline, aproximan una nube de puntos Cada curva sobre la superficie es una NURBS El grado es independiente del número de puntos Se incorpora un conjunto de pesos que controlan cómo la superficie se aproxima a los puntos de control Si los pesos son, NURBS = BSpline 49
50 Funciones base S( u, v) m n i j m n h i j ij h p ij Superficies Libres Superficies Bicúbicas NURBS ij N N i, K i, K ( u) N ( u) N j, L j, L ( v) ( v) p ij = Puntos de control K, L = Grado en sentido u y v (es 3) N i,k, N j,l : Func. base de grado K y L h ij = Peso asociado al punto p ij Las funciones base son las mismas que para las superficies BSpline N,3 N,3 N 2,3 N 3,3 u/v u/v u/v u/v 5
51 Superficies Libres Superficies Bicúbicas NURBS Ventajas Las mismas ventajas que las BSpline Además, son las únicas superficies paramétricas que pueden especificar superficies cónicas de manera exacta Inconvenientes La formulación es la más compleja El usuario debe manejar un parámetro adicional: los pesos asociados a los puntos 5
52 Superficies Libres Características Ventajas Representación exacta para objetos curvos Modelo compacto Inconvenientes Formulación compleja Visualización directa muy lenta Modelo secundario visualización rápida Cálculo de modelo secundario complicado Prueba de interioridad/exterioridad complicada Cálculo de intersecciones complicado 52

53 Superficies Libres Ejemplos Objeto modelado con 8. parches B-Spline 53
54 Modelos Sólidos Conceptos Representan, además de la superficie, el interior del objeto Esto permite: Representar objetos no homogéneos Representar propiedades internas Representar el comportamiento del interior Cada modelo representa los objetos de una manera Algunos modelos (como el CSG) permiten construir objetos complejos combinando otros más sencillos 54
55 Modelos Sólidos Clasificación Sólidos generados por Instanciación de Primitivas Sólidos generados por Barrido Sólidos generados por Enumeración Espacial Geometría Sólida Constructiva 55
56 Instanciación de Primitivas Definición Se parte de un conjunto finito de formas primitivas En cada primitiva se parametrizan determinadas dimensiones Se establecen restricciones entre los parámetros de las primitivas Se instancian las primitivas dando valores a los parámetros respetando las restricciones Internamente, las primitivas pueden almacenarse utilizando cualquier modelo 56
57 Instanciación de Primitivas Ejemplo Primitiva a r r 2 Restricciones a, b, c, d, e, f > r < r 2 r 2 > d c > 2 d a, b > d Instancias c d f b 57
58 Instanciación de Primitivas Características Ventajas Modelado muy sencillo Modelo compacto Inconvenientes Objetos limitados por las primitivas disponibles Las características de los objetos dependen del modelo concreto utilizado para las primitivas 58
59 Sólidos por Barrido Definición También se denomina Modelo Sweep Los sólidos se obtienen a partir de: Una forma bidimensional: sección o generador Una forma tridimensional: trayectoria o director La sección se desplaza sobre la trayectoria formando el objeto por barrido Tipos de objetos generados por barrido: Extrusión Rotación Barrido Generalizado 59


60 Sólidos por Barrido Extrusión La sección es un forma bidimensional que permanece constante La trayectoria es una recta normal a la sección Sección Trayectoria 6


61 Sólidos por Barrido Rotación La sección es un forma bidimensional que permanece constante La trayectoria es un eje de rotación Sección Eje de rotación 6




62 Sólidos por Barrido Generalización La sección puede cambiar de tamaño, orientación o forma La trayectoria es cualquier forma 62
63 Sólidos por Barrido Generalización Orientación de la sección: Sección normal a la trayectoria Sección con cualquier orientación Una orientación inadecuada puede dar lugar a inconsistencias N 63
64 Sólidos por Barrido Características Ventajas Modelado muy sencillo de entender y realizar Posibilidad de obtener objetos complejos a partir de componentes muy sencillas Modelo matemáticamente conciso Sirve de base a otros modelos (objetos paramétricos, CSG, ) Inconvenientes Posibilidad de crear objetos inconsistentes Necesidad de obtener un modelo secundario para visualización 64
65 Enumeración Espacial Definición Enumeración de la ocupación espacial El espacio se divide en regiones (cubos, vóxels ) etiquetadas como interiores/exteriores Posibles representaciones: Rejilla de vóxels Arboles octales (octrees) Arboles de partición binaria del espacio (BSP) 65
:")

66 66 Enumeración Espacial Rejilla de Voxels El objeto se representa en un espacio dividido en pequeños cubos (vóxels): Los vóxels interiores al objeto se etiquetan con Los vóxels exteriores al objeto se etiquetan con Tiene grandes requerimientos de espacio
67 Enumeración Espacial Árboles Octales (Octrees) Se utiliza una estructura jerárquica en forma de árbol Algoritmo: Definir un cubo inicial que engloba a todo el objeto Si cubo completamente exterior al objeto, etiqueta = Si cubo completamente interior al objeto, etiqueta = En otro caso, dividir cubo en 8 y repetir para cada cubo Terminar cuando se alcanza una resolución adecuada 67
68 Enumeración Espacial Árboles BSP También se trata de una estructura en forma de árbol Algoritmo: Dividir el espacio en dos subespacios mediante un plano Si un subespacio es exterior al objeto, su etiqueta = Si un subespacio es interior al objeto, su etiqueta = En otro caso, dividir en dos subespacios y repetir para cada uno Terminar cuando se alcanza una resolución adecuada subespacio subespacio 2 subespacio subespacio 2 68
69 Enumeración Espacial Características Los árboles octales y BSP rebajan la necesidad de espacio Ventajas Prueba de interioridad/exterioridad muy sencilla, recorriendo el árbol Representación homogénea Inconvenientes Se pierden las relaciones entre las diferentes partes del objeto Sigue habiendo grandes requerimientos de espacio para almacenar el modelo Modelo aproximado 69
70 Geometría Sólida Constructiva Definición No es propiamente un modelo, sino una forma de combinar objetos sencillos para obtener otros más complejos Consta de: Un conjunto de primitivas descritas mediante cualquier modelo Un conjunto de operadores booleanos: unión, intersección y diferencia Los objetos se representan mediante árboles binarios que especifican las operaciones entre primitivas 7



71 Geometría Sólida Constructiva Árboles Binarios En un árbol CSG: Las hojas son las primitivas Los nodos interiores son las operaciones La raíz es el objeto final U P 3 P P 2 7
72 Geometría Sólida Constructiva Operaciones Booleanas A A B A B A - B B Las operaciones booleanas pueden dar lugar a objetos incosistentes Operaciones regularizadas A A B A A B B B 72
73 Geometría Sólida Constructiva Intersección Regularizada * Dividimos los objetos en interior (ia e ib) y frontera (fa y fb) A = ia fa; B = ib fb A * B = (iaib) (iafb) (faib) (fafb)* Int A A B A * B B no (ia ib) (ia fb) (fa ib) sí (fa fb)* Int 73
74 Geometría Sólida Constructiva Unión Regularizada * A*B = (iaib) (fafb) -[(iafb) (faib) (fafb)* Un ] A B A * B sí (ia ib) (fa fb) (ia fb) (fa ib) no (fa fb)* Un 74
75 Geometría Sólida Constructiva Diferencia Regularizada -* A-*B = (fa-fb-ib) (iafb) (fafb)* Dif (ia-fb-ib) A B A -* B sí no (fa-fb-ib) (ia fb) (fa fb)* Dif ia-fb-ib 75
76 Geometría Sólida Constructiva Características Los objetos resultantes de las operaciones regularizadas, son válidos si lo son las primitivas Posibles primitivas: Instanciación de primitivas básicas Objetos simples generados por barrido Se utilizan dos representaciones Modelo procedural (primario): árbol binario Modelo superficial (secundario): b-rep Evaluador Superficial: Conjunto de algoritmos para generar el modelo secundario: Crea y borra vértices, aristas y caras Reorganiza los elementos asegurando la consistencia 76
77 Geometría Sólida Constructiva Características Ventajas Prueba de interioridad/exterioridad muy sencilla, recorriendo el árbol Modelo exacto Inconvenientes Difícil implementación de las operaciones booleanas Visualización complicada: Métodos directos Modelo secundario superficial Limitación impuesta por las primitivas utilizadas 77
78 Otros Modelos Clasificación Veremos un conjunto de modelos no emparentados entre sí: Geometría fractal Modelos gramaticales Sistemas de partículas Modelos basados en características físicas Modelos para visualización científica 78
79 Geometría Fractal Definición Modo alternativo de representar objetos Geometría Euclídea: objetos representados por ecuaciones Geometría Fractal: objetos representados por procedimientos Los objetos se generan mediante una operación sobre una primitiva repetida infinitamente Características de los objetos fractales Infinito detalle Autosimilitud entre las partes y el todo 79


80 Geometría Fractal Usos Gráficos: generación de objetos naturales Rocas Montañas Plantas Nubes Agua Plumas Piel Otros campos Modelado de fenómenos físicos Distribuciones de astros Modelado de variaciones en bolsa Música fractal 8
81 Geometría Fractal Dimensión Fractal Dimensión de los objetos En Geometría Euclídea, la dimensión es entera Puntos: dimensión Rectas: dimensión Planos: dimensión 2 Volúmenes: dimensión 3 En Geometría Fractal, la dimensión puede ser fraccionaria (de ahí el nombre Fractal). La dimensión fractal indica la rugosidad del objeto Recta: dimensión Curva rugosa: dimensión entre y 2 8

82 Figura Original Recta Geometría Fractal Cálculo de la Dimensión Fractal Duplicando sus Dimensiones Número de Copias 2 = 2 Dimensión Cuadrado 4 = Cubo 8 = En general n = 2 d d = log n/log 2 Triángulo de Sierpinski 3 = 2 d d = log 3/log 2 =,
, no lineal, aleatoria, con parámetros de decisión, La transformación se aplica infinitamente a la primitiva: P = F(P ) P 2 =")
83 Geometría Fractal Generación de Objetos Fractales Para definir un objeto fractal necesitamos: Un primitiva geométrica P : punto, recta, curva, área de color, superficie, sólido, Una función de transformación F que puede ser afín (traslaciones, rotaciones, escalados), no lineal, aleatoria, con parámetros de decisión, La transformación se aplica infinitamente a la primitiva: P = F(P ) P 2 = F(P ) P 3 = F(P 2 ) En la práctica, la aplicación de la transformación es finita se detiene cuando el detalle tiene menor tamaño que un pixel 83

84 Geometría Fractal Ejemplo: Curva de Von Koch Primitiva P : un triángulo Función de transformación F P P P 2 P 84

85 Parte compleja Geometría Fractal Ejemplo: Conjunto de Mandelbrot Primitiva P : Número real Función de transformación F: P i =P i-2 +c, con c todos los reales y complejos tal que c 2 Pertenecen al conjunto, aquellos valores de c que hacen que la serie P i =P i-2 +c no tienda a infinito Los valores para los que la serie necesita muchas iteraciones para tender a infinito, se encuentran en la frontera Parte real 85





86 Geometría Fractal Ejemplo: Conjunto de Mandelbrot 86







87 Geometría Fractal Ejemplos 87
88 Modelos Gramaticales Definición Se parte de una gramática con reglas de producción Un objeto válido, es cualquier palabra que sea reconocida por la gramática Las reglas de producción permiten: Aplicar transformaciones alterar la geometría Añadir detalle 88
89 Modelos Gramaticales Ejemplo Gramática árbol tronco {rama} rama {rama} rama {hoja} hoja Objeto tronco (rama (rama hoja rama) rama hoja) 89
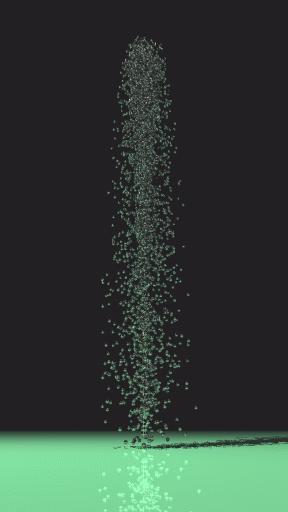
90 Sistemas de Partículas Definición Adecuado para definir objetos variables tipo fluido : Nubes Humo y fuego Pelo y plumas Líquidos Campos de hierba Explosiones Los objetos están formados por partículas que cambian de posición o atributos con el tiempo 9
91 Sistemas de Partículas Ejemplo Fuegos Artificiales Cada partícula modela un punto de luz Se generan partículas aleatoriamente en un volumen esférico La partícula se mueve radialmente, con dirección inicial aleatoria Se tiene en cuenta la gravedad La partícula cambia de color conforme avanza Se destruye la partícula en algún momento de forma aleatoria 9


92 Sistemas de Partículas Ejemplos 92


93 Sistemas de Partículas Ejemplos 93
94 Características Físicas Definición Modelos basados en características físicas de los materiales El objeto se describe en términos de la interacción de las fuerzas internas/externas Muy adecuado para modelar objetos no rígidos: Tejidos Objetos de goma Muelles 94
95 Características Físicas Modelado mediante resortes Un caso particular muy útil Los objetos se modelan como una red de nodos unidos mediante conexiones flexibles (resortes) Cada resorte lleva asociado una constante k Se plantea una ecuación para cada resorte (ley de Hooke) y se resuelve el sistema para todas las ecuaciones Los objetos pueden ser 2D (tejidos ) o 3D (bloques de goma ) k k 2 k 5 k 6 k 7 k 3 k 4 Si k = k 2 = = k n objeto homogéneo 95





96 Características Físicas Ejemplos 96
97 Visualización Científica Definición Visualización científica: visualización de datos para el análisis científico Representacionse gráficas de datos no gráficos Conjunto de datos demasiado grandes, para descubrir tendencias, ciclos, Se pueden representar Escalares Vectores Tensores Datos con variables múltiples 97
98 Visualización Científica Representación de Escalares Cantidades con un solo valor, en función del tiempo, la posición u otros parámetros Son escalares: Energía Densidad Masa Temperatura Presión Carga Resistencia Frecuencia Técnicas para representar escalares: Diagramas de barras Gráficos de pseudocolor Trazos de contorno (isolíneas) Presentación de volumen 98



99 Visualización Científica Ejemplos de Rep. de Escalares 99
100 Visualización Científica Representación de Vectores Un vector n-dimensional puede representarse Como un punto en un espacio n-dimensional Como magnitud y dirección, en un espacio 3D Son vectores: Velocidad Aceleración Fuerza Campos (eléctricos, magnéticos, gravitatorios) Corriente eléctrica Técnicas para representar vectores Flechas Líneas de campo Flujo de partículas
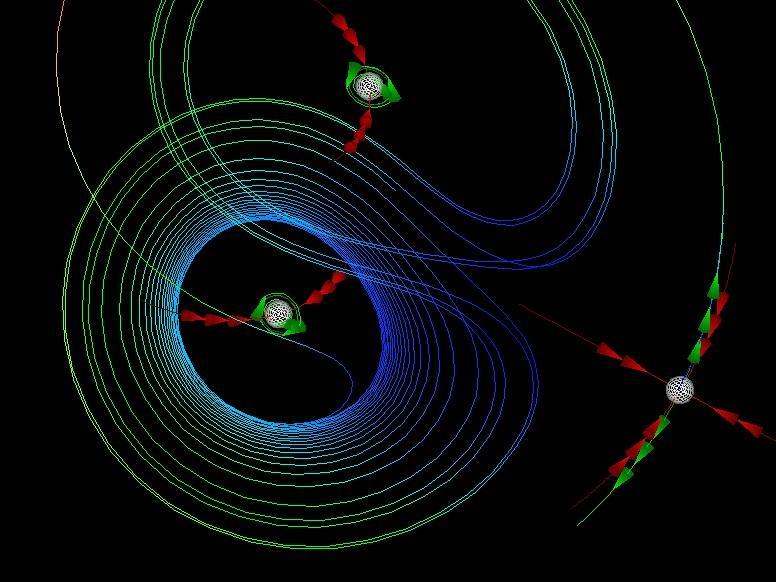


101 Visualización Científica Ejemplos de Rep. de Vectores
102 Visualización Científica Representación de Tensores En un espacio 3D, un tensor tiene 9 componentes (una matriz 3x3), generalmente 3 simétricos (en total 6 diferentes) Son tensores Tensiones de un material Conductividad Resistividad Técnicas para representar tensores Formas con 6 parámetros: Flechas (3 términos dan la dirección y magnitud y los otros 3 el color y forma) Reducción a vectores o escalares 2


103 Visualización Científica Ejemplos de Rep. de Tensores 3
diseño asistido por computador Modelado sólido departamento de ingeniería de sistemas y automática
 diseño asistido por computador Modelado sólido departamento de ingeniería de sistemas y automática ALÁMBRICOS MODELADORES GEOMÉTRICOS SUPERFICIES SÓLIDOS poliédricas libres barridos instanciación y parametrización
diseño asistido por computador Modelado sólido departamento de ingeniería de sistemas y automática ALÁMBRICOS MODELADORES GEOMÉTRICOS SUPERFICIES SÓLIDOS poliédricas libres barridos instanciación y parametrización
MCRivara/CG2008/1. MCRivara/CG2007/2MCRivara/CG2008/1 1. Modelación de Sólidos. Computación Gráfica. Modelos de sólidos
 Computación Gráfica Modelación de Sólidos Prof. María Cecilia Rivara mcrivara@dcc.uchile.cl Semestre 2009/1 Modelación de Sólidos Objetivo: Modelos matemáticos de objetos del mundo real (automóvil, motor,
Computación Gráfica Modelación de Sólidos Prof. María Cecilia Rivara mcrivara@dcc.uchile.cl Semestre 2009/1 Modelación de Sólidos Objetivo: Modelos matemáticos de objetos del mundo real (automóvil, motor,
Prof. Sandra Baldassarri. Objetivos del modelado. ordenador. Modelado Geométrico
 Clasificación de los modelos geométricos Representación de objetos en 3D Modelos de Puntos Modelos de Curvas y Superficies Modelos de Sólidos Prof. Sandra Baldassarri Objetivos del modelado Modelos geométricos
Clasificación de los modelos geométricos Representación de objetos en 3D Modelos de Puntos Modelos de Curvas y Superficies Modelos de Sólidos Prof. Sandra Baldassarri Objetivos del modelado Modelos geométricos
Modelado de Sólidos. Prof. Eduardo Fernández (Universidad de la República de Uruguay) -
 -") Modelado de Sólidos Prof. Eduardo Fernández (Universidad de la República de Uruguay) - http://www.fing.edu.uy/inco/cursos/compgraf/ Prof. Juan Carlos Peris (Universidad Jaume I) Capitulo 8. Gráficos por
Modelado de Sólidos Prof. Eduardo Fernández (Universidad de la República de Uruguay) - http://www.fing.edu.uy/inco/cursos/compgraf/ Prof. Juan Carlos Peris (Universidad Jaume I) Capitulo 8. Gráficos por
1 Representación por superficies de polígonos
 1 La representación de frontera que más se utiliza para un objeto gráfico tridimensional es un conjunto de polígonos de superficie que encierran el interior del objeto. Muchos sistemas gráficos almacenan
1 La representación de frontera que más se utiliza para un objeto gráfico tridimensional es un conjunto de polígonos de superficie que encierran el interior del objeto. Muchos sistemas gráficos almacenan
INDICE 1. Introducción: Graficación por Computador 2. Programación en el Paquete SRGP 3. Algoritmos Básicos de Gráficos de Barrido para Dibujar
 INDICE 1. Introducción: Graficación por Computador 1 1.1. Algunas aplicaciones de la graficación por computador 1 1.2. Breve historia de la graficación por computadora 7 1.2.1. Tecnología de salida 9 1.2.2.
INDICE 1. Introducción: Graficación por Computador 1 1.1. Algunas aplicaciones de la graficación por computador 1 1.2. Breve historia de la graficación por computadora 7 1.2.1. Tecnología de salida 9 1.2.2.
El pipeline de visualización es el conjunto de
 Sistemas de Visualización Pipeline de visualización 3D Definición del modelo geométrico Transformaciones geométricas Transformaciones de visualización Volumen de visualización Proyecciones Pipeline de
Sistemas de Visualización Pipeline de visualización 3D Definición del modelo geométrico Transformaciones geométricas Transformaciones de visualización Volumen de visualización Proyecciones Pipeline de
Curvas y Superficies
 Curvas y Superficies Curvas y Superficies q Motivación q Representación de curvas y superficies q Curvas paramétricas cúbicas q Curvas de Hermite q Curvas de Bézier q B-splines q Superficies paramétricas
Curvas y Superficies Curvas y Superficies q Motivación q Representación de curvas y superficies q Curvas paramétricas cúbicas q Curvas de Hermite q Curvas de Bézier q B-splines q Superficies paramétricas
INDICE Prefacio 1 Un estudio de las graficas por computadora 2 Panorama general de los sistemas de gráficas 3 Primitivos de salida
 INDICE Prefacio xvii 1 Un estudio de las graficas por computadora 2 1-1 diseño asistido por computadora 4 1-2 Graficas de presentación 11 1-3 Arte de computadora 13 1-4 Entretenimiento 18 1-5 educación
INDICE Prefacio xvii 1 Un estudio de las graficas por computadora 2 1-1 diseño asistido por computadora 4 1-2 Graficas de presentación 11 1-3 Arte de computadora 13 1-4 Entretenimiento 18 1-5 educación
Modelado de objetos. Objetivo
 Modelado de objetos http://www.theforce.net/scifi3d/starwars/meshes/milfalcon.jpg Watt cap. 2, Hearn 10.1-10.4, 10.14-10.16 Objetivo Representación de un objeto real o descrito en el ordenador. Para representar
Modelado de objetos http://www.theforce.net/scifi3d/starwars/meshes/milfalcon.jpg Watt cap. 2, Hearn 10.1-10.4, 10.14-10.16 Objetivo Representación de un objeto real o descrito en el ordenador. Para representar
Modelos 3D? De dónde vienen los datos?
 Modelos 3D? De dónde vienen los datos? Fuentes: 1) Directamente especificando los datos: Funciona bien para formas sencillas: y z x Pero no para este: Fuentes para modelos 3D Directamente especificando
Modelos 3D? De dónde vienen los datos? Fuentes: 1) Directamente especificando los datos: Funciona bien para formas sencillas: y z x Pero no para este: Fuentes para modelos 3D Directamente especificando
TEMARIO DE PROFESORES DE ENSEÑANZA SECUNDARIA MATEMÁTICAS
 HOJA INFORMATIVA A.5.2.33 TEMARIO DE PROFESORES DE ENSEÑANZA SECUNDARIA MATEMÁTICAS Publicado en el B.O.E. de 21 de Septiembre de 1.993 MARZO 1998 MATEMÁTICAS 1. Números naturales. Sistemas de numeración.
HOJA INFORMATIVA A.5.2.33 TEMARIO DE PROFESORES DE ENSEÑANZA SECUNDARIA MATEMÁTICAS Publicado en el B.O.E. de 21 de Septiembre de 1.993 MARZO 1998 MATEMÁTICAS 1. Números naturales. Sistemas de numeración.
Representación de curvas y superficies
 Representación de curvas y superficies Basado en: Capítulo 9 Del Libro: Introducción a la Graficación por Computador Foley Van Dam Feiner Hughes - Phillips Resumen del capítulo Representación de curvas
Representación de curvas y superficies Basado en: Capítulo 9 Del Libro: Introducción a la Graficación por Computador Foley Van Dam Feiner Hughes - Phillips Resumen del capítulo Representación de curvas
Fundamentos matemáticos. Tema 3 Geometría del plano y del espacio
 Fundamentos matemáticos Grado en Ingeniería agrícola y del medio rural Tema 3 Geometría del plano y del espacio José Barrios García Departamento de Análisis Matemático Universidad de La Laguna jbarrios@ull.es
Fundamentos matemáticos Grado en Ingeniería agrícola y del medio rural Tema 3 Geometría del plano y del espacio José Barrios García Departamento de Análisis Matemático Universidad de La Laguna jbarrios@ull.es
Mecánica de Fluidos. Análisis Diferencial
 Mecánica de Fluidos Análisis Diferencial Análisis Diferencial: Descripción y caracterización del flujo en función de la descripción de una partícula genérica del flujo. 1. Introducción 2. Movimiento de
Mecánica de Fluidos Análisis Diferencial Análisis Diferencial: Descripción y caracterización del flujo en función de la descripción de una partícula genérica del flujo. 1. Introducción 2. Movimiento de
Departament d Enginyeria Mecànica i Construcció P. Company Modelado mediante superficies 1
 Departament d Enginyeria Mecànica i Construcció 1.4 14 MODELADO MEDIANTE SUPERFICIES Pedro Company 2013 P. Company Modelado mediante superficies 1 Una superficie es una frontera que separa dos regiones
Departament d Enginyeria Mecànica i Construcció 1.4 14 MODELADO MEDIANTE SUPERFICIES Pedro Company 2013 P. Company Modelado mediante superficies 1 Una superficie es una frontera que separa dos regiones
Algebra lineal y conjuntos convexos
 Apéndice A Algebra lineal y conjuntos convexos El método simplex que se describirá en el Tema 2 es de naturaleza algebraica y consiste en calcular soluciones de sistemas de ecuaciones lineales y determinar
Apéndice A Algebra lineal y conjuntos convexos El método simplex que se describirá en el Tema 2 es de naturaleza algebraica y consiste en calcular soluciones de sistemas de ecuaciones lineales y determinar
CLASIFICACIÓN AFÍN DE CÓNICAS
 Álgebra lineal y Geometría I Gloria Serrano Sotelo Departamento de MATEMÁTICAS CLASIFICACIÓN AFÍN DE CÓNICAS Sea E un R-espacio vectorial de dimensión. Sean E = e 1, e un plano vectorial de E y e 0 un
Álgebra lineal y Geometría I Gloria Serrano Sotelo Departamento de MATEMÁTICAS CLASIFICACIÓN AFÍN DE CÓNICAS Sea E un R-espacio vectorial de dimensión. Sean E = e 1, e un plano vectorial de E y e 0 un
MODELADO DE OBJETOS 3D. Computación Gráfica
 MODELADO DE OBJETOS 3D Computación Gráfica Referencia K.Shoemake. Animating Rotation with Quaternion Curves. SIGGRAPH 1985. http://run.usc.edu/cs520-s12/assign2/p245- shoemake.pdf Tipos de modelado de
MODELADO DE OBJETOS 3D Computación Gráfica Referencia K.Shoemake. Animating Rotation with Quaternion Curves. SIGGRAPH 1985. http://run.usc.edu/cs520-s12/assign2/p245- shoemake.pdf Tipos de modelado de
2 Transformaciones en 3D
 2 Transformaciones en 3D La manera más fácil de conseguir las transformaciones básicas (traslación, rotación, escalación, en general las transformaciones afines) es utilizando matrices de transformación.
2 Transformaciones en 3D La manera más fácil de conseguir las transformaciones básicas (traslación, rotación, escalación, en general las transformaciones afines) es utilizando matrices de transformación.
Expresión decimal. Aproximación y estimación. Notación científica. Polinomios. Divisibilidad de polinomios. Regla de Ruffini.
 Otras páginas Matemáticas 5º Matemáticas I. Bloque I: ARITMÉTICA Y ÁLGEBRA Los números reales Los números reales, concepto y características. Estructura algebraica, orden, representación en la recta real
Otras páginas Matemáticas 5º Matemáticas I. Bloque I: ARITMÉTICA Y ÁLGEBRA Los números reales Los números reales, concepto y características. Estructura algebraica, orden, representación en la recta real
18 Experimentos aleatorios. Sucesos y espacio muestral. Frecuencia y probabilidad de un suceso.
 PRIMER CURSO DE E.S.O Criterios de calificación: 80% exámenes, 10% actividades, 10% actitud y trabajo 1 Números naturales. 2 Potencias de exponente natural. Raíces cuadradas exactas. 3 Divisibilidad. Concepto
PRIMER CURSO DE E.S.O Criterios de calificación: 80% exámenes, 10% actividades, 10% actitud y trabajo 1 Números naturales. 2 Potencias de exponente natural. Raíces cuadradas exactas. 3 Divisibilidad. Concepto
Visión artificial y Robótica Modelos de movimiento y mapas. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Modelos de movimiento y mapas Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sistemas de coordenadas Localización de objetos en el espacio Modelos
Visión artificial y Robótica Modelos de movimiento y mapas Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sistemas de coordenadas Localización de objetos en el espacio Modelos
Matemáticas II Bachillerato Ciencias y Tecnología 2º Curso ESPACIO AFÍN Introducción Ecuaciones de la recta...
 Unidad 5 ESPACIO AFÍN 5.. Introducción.... - - 5.. Ecuaciones de la recta.... - - 5.3. Ecuaciones del plano.... - 4-5.4. Posiciones relativas (Incidencia y paralelismo).... - 6 - Anexo I.- EJERCICIOS...
Unidad 5 ESPACIO AFÍN 5.. Introducción.... - - 5.. Ecuaciones de la recta.... - - 5.3. Ecuaciones del plano.... - 4-5.4. Posiciones relativas (Incidencia y paralelismo).... - 6 - Anexo I.- EJERCICIOS...
Estéreo dinámico. Estéreo dinámico
 Estéreo dinámico 1 Vectores locales de desplazamiento Dada una secuencia de imagenes Tomadas a intervalos Movimiento absoluto: movimiento independiente de la cámara Movimiento relativo: movimiento debido
Estéreo dinámico 1 Vectores locales de desplazamiento Dada una secuencia de imagenes Tomadas a intervalos Movimiento absoluto: movimiento independiente de la cámara Movimiento relativo: movimiento debido
Visualización y Realismo: Problemas Capítulo 2
 Visualización y Realismo: Problemas Capítulo 2 Carlos Ureña Almagro Curso 2011-12 1 Problema 2.1 Calcula los coeficientes de la ecuación implícita de la recta que pasa por los puntos p 0 y p 1 Y p 0 p
Visualización y Realismo: Problemas Capítulo 2 Carlos Ureña Almagro Curso 2011-12 1 Problema 2.1 Calcula los coeficientes de la ecuación implícita de la recta que pasa por los puntos p 0 y p 1 Y p 0 p
Curvas de Bézier. Leonardo Fernández Jambrina. Matemática Aplicada E.T.S.I. Navales Universidad Politécnica de Madrid
 Curvas de Bézier Leonardo Fernández Jambrina Matemática Aplicada E.T.S.I. Navales Universidad Politécnica de Madrid L. Fernández (U.P.M.) Modelado geométrico: Curvas de Bézier 1 / 30 Plano de formas de
Curvas de Bézier Leonardo Fernández Jambrina Matemática Aplicada E.T.S.I. Navales Universidad Politécnica de Madrid L. Fernández (U.P.M.) Modelado geométrico: Curvas de Bézier 1 / 30 Plano de formas de
Modelación de objetos 3D Parte II: Modelación de sólidos
 Modelación de objetos 3D Parte II: Modelación de sólidos Contenido Conceptos: Qué es un sólido? Propiedades de los modelos de sólidos Geometría sólida constructiva (Constructive solid modeling) Representación
Modelación de objetos 3D Parte II: Modelación de sólidos Contenido Conceptos: Qué es un sólido? Propiedades de los modelos de sólidos Geometría sólida constructiva (Constructive solid modeling) Representación
Fundamentos de POV-Ray. Computación Geométrica 2010/2011 Jorge Calvo Zaragoza
 Fundamentos de POV-Ray Computación Geométrica 2010/2011 Jorge Calvo Zaragoza Índice 1. Introducción 2. Fundamentos del trazado de rayos 3. Construcción de escenas con POV-Ray 4. Geometría sólida constructiva
Fundamentos de POV-Ray Computación Geométrica 2010/2011 Jorge Calvo Zaragoza Índice 1. Introducción 2. Fundamentos del trazado de rayos 3. Construcción de escenas con POV-Ray 4. Geometría sólida constructiva
Problemas de exámenes de Geometría
 1 Problemas de exámenes de Geometría 1. Consideramos los planos π 1 : X = P+λ 1 u 1 +λ 2 u 2 y π 2 : X = Q+µ 1 v 1 +µ 2 v 2. Cuál de las siguientes afirmaciones es incorrecta? a) Si π 1 π 2 Ø, entonces
1 Problemas de exámenes de Geometría 1. Consideramos los planos π 1 : X = P+λ 1 u 1 +λ 2 u 2 y π 2 : X = Q+µ 1 v 1 +µ 2 v 2. Cuál de las siguientes afirmaciones es incorrecta? a) Si π 1 π 2 Ø, entonces
en dos dimensiones como objetos que tienen magnitud, dirección y su representación geométrica.
 1 N.SN.11.1.1 Define vectores en dos dimensiones como objetos que tienen magnitud, dirección y su representación geométrica. Vectores Unidad 4: Vectores Tema 1: Vectores Lección 1: Definición 11 Introducción
1 N.SN.11.1.1 Define vectores en dos dimensiones como objetos que tienen magnitud, dirección y su representación geométrica. Vectores Unidad 4: Vectores Tema 1: Vectores Lección 1: Definición 11 Introducción
y cualquier par (x, y) puede escalarse, multiplicarse por un número real s, para obtener otro vector (sx, sy).
 puede escalarse, multiplicarse por un número real s, para obtener otro vector (sx, sy).") UNIDAD II: VECTORES EN DOS Y TRES DIMENSIONES Un espacio vectorial (o espacio lineal) es el objeto básico de estudio en la rama de la matemática llamada álgebra lineal. A los elementos de los espacios
UNIDAD II: VECTORES EN DOS Y TRES DIMENSIONES Un espacio vectorial (o espacio lineal) es el objeto básico de estudio en la rama de la matemática llamada álgebra lineal. A los elementos de los espacios
Conjuntos de nivel, diagramas de contorno, gráficas. Funciones vectoriales de una y dos variables.
 Empezaremos el curso introduciendo algunos conceptos básicos para el estudio de funciones de varias variables, que son el objetivo de la asignatura: Funciones escalares de dos y tres variables. Conjuntos
Empezaremos el curso introduciendo algunos conceptos básicos para el estudio de funciones de varias variables, que son el objetivo de la asignatura: Funciones escalares de dos y tres variables. Conjuntos
Matemáticas. Si un error simple ha llevado a un problema más sencillo se disminuirá la puntuación.
 UNIVERSIDAD POLITÉCNICA DE CARTAGENA PRUEBAS DE ACCESO A LA UNIVERSIDAD DE LOS MAYORES DE 25 AÑOS CONVOCATORIA 2014 CRITERIOS DE EVALUACIÓN Matemáticas GENERALES: El examen constará de dos opciones (dos
UNIVERSIDAD POLITÉCNICA DE CARTAGENA PRUEBAS DE ACCESO A LA UNIVERSIDAD DE LOS MAYORES DE 25 AÑOS CONVOCATORIA 2014 CRITERIOS DE EVALUACIÓN Matemáticas GENERALES: El examen constará de dos opciones (dos
Vectores. b) Hallar la magnitud de cada uno de los vectores P Q, QRy P R. c) Encontrar el vector fijo equivalente a QP.
 Hallar la magnitud de cada uno de los vectores P Q, QRy P R. c) Encontrar el vector fijo equivalente a QP.") Wilson Herrera 1 Vectores 1. Dados los puntos P (1, 2), Q( 2, 2) y R(1, 6): a) Representarlos en el plano XOY. b) Hallar la magnitud de cada uno de los vectores P Q, QRy P R. c) Encontrar el vector fijo
Wilson Herrera 1 Vectores 1. Dados los puntos P (1, 2), Q( 2, 2) y R(1, 6): a) Representarlos en el plano XOY. b) Hallar la magnitud de cada uno de los vectores P Q, QRy P R. c) Encontrar el vector fijo
Unidad 1: Sistemas de ecuaciones. Método de Gauss
 CRITERIOS DE EVALUACIÓN Y EXIGIBLES. MATEMÁTICAS II Unidad 1: Sistemas de ecuaciones. Método de Gauss Sistemas de ecuaciones lineales - Sistemas equivalentes. - Transformaciones que mantienen la equivalencia.
CRITERIOS DE EVALUACIÓN Y EXIGIBLES. MATEMÁTICAS II Unidad 1: Sistemas de ecuaciones. Método de Gauss Sistemas de ecuaciones lineales - Sistemas equivalentes. - Transformaciones que mantienen la equivalencia.
INDICE 1. Desigualdades 2. Relaciones, Funciones, Graficas 3. La Línea Recta 4. Introducción al Cálculo. Límites
 INDICE 1. Desigualdades 1 1. Desigualdades 1 2. Valor absoluto 8 3. Valor absoluto y desigualdades 11 2. Relaciones, Funciones, Graficas 16 1. Conjunto. Notación de conjuntos 16 2. El plano coordenado.
INDICE 1. Desigualdades 1 1. Desigualdades 1 2. Valor absoluto 8 3. Valor absoluto y desigualdades 11 2. Relaciones, Funciones, Graficas 16 1. Conjunto. Notación de conjuntos 16 2. El plano coordenado.
ESCALARES Y VECTORES
 ESCALARES Y VECTORES MAGNITUD ESCALAR Un escalar es un tipo de magnitud física que se expresa por un solo número y tiene el mismo valor para todos los observadores. Se dice también que es aquella que solo
ESCALARES Y VECTORES MAGNITUD ESCALAR Un escalar es un tipo de magnitud física que se expresa por un solo número y tiene el mismo valor para todos los observadores. Se dice también que es aquella que solo
CFGS CONSTRUCCION METALICA MODULO 246 DISEÑO DE CONSTRUCCIONES METALICAS
 CFGS CONSTRUCCION METALICA MODULO 246 DISEÑO DE CONSTRUCCIONES METALICAS U.T. 4.- ESTATICA. 3.1.- Centro de gravedad de un cuerpo. Un cuerpo de masa M, se puede considerar compuesto por multitud de partículas
CFGS CONSTRUCCION METALICA MODULO 246 DISEÑO DE CONSTRUCCIONES METALICAS U.T. 4.- ESTATICA. 3.1.- Centro de gravedad de un cuerpo. Un cuerpo de masa M, se puede considerar compuesto por multitud de partículas
Conceptos básicos de Geometría
 Dr. Eduardo A. RODRÍGUEZ TELLO CINVESTAV-Tamaulipas 15 de enero del 2013 Dr. Eduardo RODRÍGUEZ T. (CINVESTAV) 15 de enero del 2013 1 / 25 1 Geometría Afín Geometría Euclidiana Áreas y ángulos Dr. Eduardo
Dr. Eduardo A. RODRÍGUEZ TELLO CINVESTAV-Tamaulipas 15 de enero del 2013 Dr. Eduardo RODRÍGUEZ T. (CINVESTAV) 15 de enero del 2013 1 / 25 1 Geometría Afín Geometría Euclidiana Áreas y ángulos Dr. Eduardo
Formulación del problema de la ruta más corta en programación lineal
 Formulación del problema de la ruta más corta en programación lineal En esta sección se describen dos formulaciones de programación lineal para el problema de la ruta más corta. Las formulaciones son generales,
Formulación del problema de la ruta más corta en programación lineal En esta sección se describen dos formulaciones de programación lineal para el problema de la ruta más corta. Las formulaciones son generales,
Bachillerato Internacional. Matemáticas Nivel Medio. Programa para el curso 1º ( )
") 1 Bachillerato Internacional. Matemáticas Nivel Medio. Programa para el curso 1º (2015-2016) Tema 1: NÚMEROS REALES Conjuntos numéricos. Números naturales. Números enteros. Números racionales. Números
1 Bachillerato Internacional. Matemáticas Nivel Medio. Programa para el curso 1º (2015-2016) Tema 1: NÚMEROS REALES Conjuntos numéricos. Números naturales. Números enteros. Números racionales. Números
EJERCICIOS DE ÁLGEBRA LINEAL TEMA 1 ESPACIOS VECTORIALES
 EJERCICIOS DE ÁLGEBRA LINEAL TEMA ESPACIOS VECTORIALES MATRICES. SISTEMAS DE ECUACIONES LINEALES Matrices ) Dada la matriz M=, prueba que n n M M, n. ) Demuestra la siguiente implicación: Si I A I AA A
EJERCICIOS DE ÁLGEBRA LINEAL TEMA ESPACIOS VECTORIALES MATRICES. SISTEMAS DE ECUACIONES LINEALES Matrices ) Dada la matriz M=, prueba que n n M M, n. ) Demuestra la siguiente implicación: Si I A I AA A
Bloque 1. Contenidos comunes. (Total: 3 sesiones)
") 4º E.S.O. OPCIÓN A 1.1.1 Contenidos 1.1.1.1 Bloque 1. Contenidos comunes. (Total: 3 sesiones) Planificación y utilización de procesos de razonamiento y estrategias de resolución de problemas, tales como
4º E.S.O. OPCIÓN A 1.1.1 Contenidos 1.1.1.1 Bloque 1. Contenidos comunes. (Total: 3 sesiones) Planificación y utilización de procesos de razonamiento y estrategias de resolución de problemas, tales como
Matemáticas Currículum Universal
 Matemáticas Currículum Universal Índice de contenidos 12-16 años 2013-2014 Matemáticas 12-16 años NÚMEROS NATURALES Historia de los números Sistemas de numeración Base de un sistema de numeración Números
Matemáticas Currículum Universal Índice de contenidos 12-16 años 2013-2014 Matemáticas 12-16 años NÚMEROS NATURALES Historia de los números Sistemas de numeración Base de un sistema de numeración Números
3. Funciones de varias variables
 Métodos Matemáticos (Curso 2013 2014) Grado en Óptica y Optometría 17 3. Funciones de varias variables Función real de varias variables reales Sea f una función cuyo dominio es un subconjunto D de R n
Métodos Matemáticos (Curso 2013 2014) Grado en Óptica y Optometría 17 3. Funciones de varias variables Función real de varias variables reales Sea f una función cuyo dominio es un subconjunto D de R n
EJERCICIOS DE ÁLGEBRA LINEAL TEMA 1 ESPACIOS VECTORIALES
 EJERCICIOS DE ÁLGEBRA LINEAL TEMA ESPACIOS VECTORIALES Formas reducidas y escalonada de una matriz SISTEMAS DE ECUACIONES LINEALES ) Encuentre una sucesión de matrices elementales E, E,..., E k tal que
EJERCICIOS DE ÁLGEBRA LINEAL TEMA ESPACIOS VECTORIALES Formas reducidas y escalonada de una matriz SISTEMAS DE ECUACIONES LINEALES ) Encuentre una sucesión de matrices elementales E, E,..., E k tal que
CONTENIDOS MÍNIMOS SEPTIEMBRE. DEPARTAMENTO DE MATEMÁTICAS
 CONTENIDOS MÍNIMOS SEPTIEMBRE. DEPARTAMENTO DE MATEMÁTICAS CONTENIDOS MÍNIMOS MATEMÁTICAS 1º ESO U.D. 1 Números Naturales El conjunto de los números naturales. Sistema de numeración decimal. Aproximaciones
CONTENIDOS MÍNIMOS SEPTIEMBRE. DEPARTAMENTO DE MATEMÁTICAS CONTENIDOS MÍNIMOS MATEMÁTICAS 1º ESO U.D. 1 Números Naturales El conjunto de los números naturales. Sistema de numeración decimal. Aproximaciones
Ministerio de Educación Pública Dirección de Gestión y Evaluación de la Calidad Departamento de Evaluación Académica y Certificación.
 Matemáticas Distribución de ítems para la prueba nacional Modalidad Académica (Diurnos Nocturnos) Convocatorias 016 ESTIMADO DOCENTE: En la modalidad de colegios académico, la Prueba de Bachillerato 016
Matemáticas Distribución de ítems para la prueba nacional Modalidad Académica (Diurnos Nocturnos) Convocatorias 016 ESTIMADO DOCENTE: En la modalidad de colegios académico, la Prueba de Bachillerato 016
Matemáticas II Bachillerato Ciencias y Tecnología 2º Curso. Espacio euclídeo Determinación de ángulos
 Espacio euclídeo 5.1. Determinación de ángulos.... - 2-5.1.1. Ángulo determinado por dos rectas secantes.... - 2-5.1.2. Ángulo determinado por planos secantes.... - 2-5.1.3. Ángulo determinado por una
Espacio euclídeo 5.1. Determinación de ángulos.... - 2-5.1.1. Ángulo determinado por dos rectas secantes.... - 2-5.1.2. Ángulo determinado por planos secantes.... - 2-5.1.3. Ángulo determinado por una
REPASO DE FUNCIONES FUNCIONES REALES DE VARIABLE REAL
 REPASO DE FUNCIONES FUNCIONES REALES DE VARIABLE REAL CORRESPONDENCIA. Se llama CORRESPONDENCIA entre dos conjuntos A y B a toda ley que asocia elementos del conjunto A con elementos del conjunto B. Se
REPASO DE FUNCIONES FUNCIONES REALES DE VARIABLE REAL CORRESPONDENCIA. Se llama CORRESPONDENCIA entre dos conjuntos A y B a toda ley que asocia elementos del conjunto A con elementos del conjunto B. Se
bloque i Programas de estudio 2011 / Guía para el Maestro Secundaria / Matemáticas
 SEGUNDO GRADO bloque i Programas de estudio 2011 / Guía para el Maestro Secundaria / Matemáticas implican el uso de las leyes de los exponentes y de la notación científica. impliquen calcular el área y
SEGUNDO GRADO bloque i Programas de estudio 2011 / Guía para el Maestro Secundaria / Matemáticas implican el uso de las leyes de los exponentes y de la notación científica. impliquen calcular el área y
Álgebra Lineal Ma1010
 Álgebra Lineal Ma1010 Líneas y s en el Espacio Departamento de Matemáticas ITESM Líneas y s en el Espacio Álgebra Lineal - p. 1/34 Los conjuntos solución a un sistema de ecuaciones lineales cuando tienen
Álgebra Lineal Ma1010 Líneas y s en el Espacio Departamento de Matemáticas ITESM Líneas y s en el Espacio Álgebra Lineal - p. 1/34 Los conjuntos solución a un sistema de ecuaciones lineales cuando tienen
ALGEBRA. Escuela Politécnica Superior de Málaga
 ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
CONTENIDO OBJETIVOS TEMÁTICOS HABILIDADES ESPECIFICAS
 UNIDAD: REGIONAL CENTRO EJE BÁSICO, DIVISIÓN DE INGENIERÍA DEPARTAMENTO: MATEMATICAS ACADEMIA: (SERVICIO) HORAS DE CATEDRA CARACTER: OBLIGATORIA CREDITOS: 08 TEORICA:03 TALLER: 02 80 REQUISITO: Cálculo
UNIDAD: REGIONAL CENTRO EJE BÁSICO, DIVISIÓN DE INGENIERÍA DEPARTAMENTO: MATEMATICAS ACADEMIA: (SERVICIO) HORAS DE CATEDRA CARACTER: OBLIGATORIA CREDITOS: 08 TEORICA:03 TALLER: 02 80 REQUISITO: Cálculo
PROGRESION 1er L 2017
 PROGRESION 1er L 2017 UNIDAD: NUMERACION SISTEMAS NUMÉRICOS. NÚMEROS NATURALES (N) Y NÚMEROS ENTEROS (Z) OPERATORIA EN Z MULTIPLOS Y DIVISORES NÚMEROS PRIMOS, COMPUESTOS Y DESCOMPOSICIÓN EN FACTORES TEOREMA
PROGRESION 1er L 2017 UNIDAD: NUMERACION SISTEMAS NUMÉRICOS. NÚMEROS NATURALES (N) Y NÚMEROS ENTEROS (Z) OPERATORIA EN Z MULTIPLOS Y DIVISORES NÚMEROS PRIMOS, COMPUESTOS Y DESCOMPOSICIÓN EN FACTORES TEOREMA
Visión de Alto Nivel
 Visión de Alto Nivel Dr. Luis Enrique Sucar INAOE esucar@inaoep.mx ccc.inaoep.mx/~esucar Sesión 4 Características 1 Visión de Alto Nivel Obtiene una interpretación consistente de las características obtenidas
Visión de Alto Nivel Dr. Luis Enrique Sucar INAOE esucar@inaoep.mx ccc.inaoep.mx/~esucar Sesión 4 Características 1 Visión de Alto Nivel Obtiene una interpretación consistente de las características obtenidas
Matemáticas Aplicadas
 Matemáticas Aplicadas para Diseño de Videojuegos 5. Matrices y Geometría Vectorial Contenidos Vectores Componente de un vector. Vectores unitarios. Módulo, suma y producto escalar. Gráficos vectoriales.
Matemáticas Aplicadas para Diseño de Videojuegos 5. Matrices y Geometría Vectorial Contenidos Vectores Componente de un vector. Vectores unitarios. Módulo, suma y producto escalar. Gráficos vectoriales.
Números reales. Valor absoluto. Desigualdades. Distancias entre la recta real. Intervalos y entornos.
 MATEMÁTICAS I Contenidos. Aritmética y álgebra: Números reales. Valor absoluto. Desigualdades. Distancias entre la recta real. Intervalos y entornos. Resolución e interpretación gráfica de ecuaciones e
MATEMÁTICAS I Contenidos. Aritmética y álgebra: Números reales. Valor absoluto. Desigualdades. Distancias entre la recta real. Intervalos y entornos. Resolución e interpretación gráfica de ecuaciones e
1.2 CONJUNTOS DEFINIDOS MEDIANTE FUNCIONES
 1.. Conjuntos definidos mediante funciones 1. CONJUNTOS DEFINIDOS MEDIANTE FUNCIONES A lo largo de este texto se verá la necesidad de diferenciar dos eventos: dada una función, encontrar los diferentes
1.. Conjuntos definidos mediante funciones 1. CONJUNTOS DEFINIDOS MEDIANTE FUNCIONES A lo largo de este texto se verá la necesidad de diferenciar dos eventos: dada una función, encontrar los diferentes
Guía de Ejercicios Sistemas Gráficos
 Guía de Ejercicios Sistemas Gráficos - 2016 Ejercicios de Transformaciones ET1 La escena de la figura 2 está compuesta a partir de los 3 modelos de la izquierda (barra, rueda y balde). El sistema gira
Guía de Ejercicios Sistemas Gráficos - 2016 Ejercicios de Transformaciones ET1 La escena de la figura 2 está compuesta a partir de los 3 modelos de la izquierda (barra, rueda y balde). El sistema gira
DISTANCIA ENTRE DOS PUNTOS EN EL PLANO CARTESIANO.
 RAZONAMIENTO Y DEMOSTRACIÓN Determina la distancia entre pares de puntos. Calcula las coordenadas del punto medio del segmento cuyos extremos son dos puntos dados. Halla la pendiente de una recta. COMUNICACIÓN
RAZONAMIENTO Y DEMOSTRACIÓN Determina la distancia entre pares de puntos. Calcula las coordenadas del punto medio del segmento cuyos extremos son dos puntos dados. Halla la pendiente de una recta. COMUNICACIÓN
13. Utilizar la fórmula del término general y de la suma de n términos consecutivos
 Contenidos mínimos 3º ESO. 1. Contenidos. Bloque I: Aritmética y álgebra. 1. Utilizar las reglas de jerarquía de paréntesis y operaciones, para efectuar cálculos con números racionales, expresados en forma
Contenidos mínimos 3º ESO. 1. Contenidos. Bloque I: Aritmética y álgebra. 1. Utilizar las reglas de jerarquía de paréntesis y operaciones, para efectuar cálculos con números racionales, expresados en forma
Programa de Acceso Inclusivo, Equidad y Permanencia. PAIEP, Universidad de Santiago
 Guía de vectores. Vectores En matemática, un vector es una herramienta geométrica utilizada para representar una magnitud física definida en un sistema de referencia que se caracteriza por tener módulo
Guía de vectores. Vectores En matemática, un vector es una herramienta geométrica utilizada para representar una magnitud física definida en un sistema de referencia que se caracteriza por tener módulo
CRITERIOS DE EVALUACIÓN 1º BACH. C. N. S. MATEMÁTICAS I
 CRITERIOS DE EVALUACIÓN 1º BACH. C. N. S. MATEMÁTICAS I UNIDAD 1 NÚMEROS REALES 1.1. Dados varios números, los clasifica en los distintos campos numéricos y los representa en la recta real. 1.2. Domina
CRITERIOS DE EVALUACIÓN 1º BACH. C. N. S. MATEMÁTICAS I UNIDAD 1 NÚMEROS REALES 1.1. Dados varios números, los clasifica en los distintos campos numéricos y los representa en la recta real. 1.2. Domina
INDICE. 88 determinante 36. Familias de líneas rectas Resumen de resultados 96
 INDICE Geometría Analítica Plana Capitulo Primero Sistema de Coordenadas Articulo 1. Introducción 1 2. Segmento rectilíneo dirigido 1 3. Sistema coordenado lineal 3 4. Sistema coordenado en el plano 5
INDICE Geometría Analítica Plana Capitulo Primero Sistema de Coordenadas Articulo 1. Introducción 1 2. Segmento rectilíneo dirigido 1 3. Sistema coordenado lineal 3 4. Sistema coordenado en el plano 5
Tema 4: Dinámica del punto I
 Tema 4: Dinámica del punto I FISICA I, 1º Grado en Ingeniería Aeroespacial Escuela Técnica Superior de Ingeniería Universidad de Sevilla 1 Índice Introducción Leyes de Newton Fuerzas activas y de reacción
Tema 4: Dinámica del punto I FISICA I, 1º Grado en Ingeniería Aeroespacial Escuela Técnica Superior de Ingeniería Universidad de Sevilla 1 Índice Introducción Leyes de Newton Fuerzas activas y de reacción
Problemas de Geometría Proyectiva
 Problemas de Geometría Proyectiva José M. Sánchez Abril José M. Rodríguez-Sanjurjo, Jesús M. Ruiz 1995 * I. VARIEDADES PROYECTIVAS Número 1. Se consideran en el plano proyectivo P 2 los cuatro puntos a
Problemas de Geometría Proyectiva José M. Sánchez Abril José M. Rodríguez-Sanjurjo, Jesús M. Ruiz 1995 * I. VARIEDADES PROYECTIVAS Número 1. Se consideran en el plano proyectivo P 2 los cuatro puntos a
Espacios Vectoriales Euclídeos. Métodos de los mínimos cuadrados
 Capítulo 5 Espacios Vectoriales Euclídeos. Métodos de los mínimos cuadrados En este tema iniciamos el estudio de los conceptos geométricos de distancia y perpendicularidad en K n. Empezaremos con las definiciones
Capítulo 5 Espacios Vectoriales Euclídeos. Métodos de los mínimos cuadrados En este tema iniciamos el estudio de los conceptos geométricos de distancia y perpendicularidad en K n. Empezaremos con las definiciones
Espacios Vectoriales
 Leandro Marín Octubre 2010 Índice Definición y Ejemplos Paramétricas vs. Impĺıcitas Bases y Coordenadas Para definir un espacio vectorial tenemos que empezar determinando un cuerpo sobre el que esté definido
Leandro Marín Octubre 2010 Índice Definición y Ejemplos Paramétricas vs. Impĺıcitas Bases y Coordenadas Para definir un espacio vectorial tenemos que empezar determinando un cuerpo sobre el que esté definido
CRITERIOS DE EVALUACIÓN DE MATEMÁTICAS 3º DE ESO
 CRITERIOS DE EVALUACIÓN DE MATEMÁTICAS 3º DE ESO UNIDAD 1 1.1. Simplifica y compara fracciones y las sitúa de forma aproximada sobre la recta. 1.2. Realiza operaciones aritméticas con números fraccionarios.
CRITERIOS DE EVALUACIÓN DE MATEMÁTICAS 3º DE ESO UNIDAD 1 1.1. Simplifica y compara fracciones y las sitúa de forma aproximada sobre la recta. 1.2. Realiza operaciones aritméticas con números fraccionarios.
INSTITUCIÓN EDUCATIVA ESCUELA NORMAL SUPERIOR DEL BAJO CAUCA
 Las matemáticas, históricamente, comenzaron con la geometría. La geometría es la ciencia que estudia la forma y posición de la figuras y nos enseña a medir su extensión. Geometría (del griego geo, tierra,
Las matemáticas, históricamente, comenzaron con la geometría. La geometría es la ciencia que estudia la forma y posición de la figuras y nos enseña a medir su extensión. Geometría (del griego geo, tierra,
TEMA 2. Dinámica, Trabajo, Energía y Presión
 TEMA 2. Dinámica, Trabajo, Energía y Presión 1. Objeto de la dinámica Dinámica es la parte de la mecánica que estudia el movimiento atendiendo a las causas que lo producen. Estas causas son las fuerzas.
TEMA 2. Dinámica, Trabajo, Energía y Presión 1. Objeto de la dinámica Dinámica es la parte de la mecánica que estudia el movimiento atendiendo a las causas que lo producen. Estas causas son las fuerzas.
Conceptos geométricos II
 Conceptos geométricos II Ángulo Ángulos Consecutivos Ángulos Alternos y Ángulos Correspondientes Polígono Polígono Regular Polígono Irregular Triángulo Cuadrilátero Superficie Círculo Superficie reglada
Conceptos geométricos II Ángulo Ángulos Consecutivos Ángulos Alternos y Ángulos Correspondientes Polígono Polígono Regular Polígono Irregular Triángulo Cuadrilátero Superficie Círculo Superficie reglada
INDICE Presentación Preliminar del Cálculo 1. Funciones y Modelos 2. Límites y Derivadas Problemas especiales 3. Reglas de Derivación
 INDICE Presentación Preliminar del Cálculo 2 1. Funciones y Modelos 10 1.1. Cuatro maneras de representar una función 11 1.2. Modelos matemáticos 24 1.3. Nuevas funciones a partir de funciones ya conocidas
INDICE Presentación Preliminar del Cálculo 2 1. Funciones y Modelos 10 1.1. Cuatro maneras de representar una función 11 1.2. Modelos matemáticos 24 1.3. Nuevas funciones a partir de funciones ya conocidas
SECCIONES CÓNICAS (1)Determinar y graficar el lugar geométrico de los puntos que equidistan de F(0, 2) y de la recta
Determinar y graficar el lugar geométrico de los puntos que equidistan de F(0, 2) y de la recta") LOS EJERCICIOS DEBEN RESOLVERSE TAMBIÉN USANDO SOFTWARE MATEMÁTICO. LAS ECUACIONES PEDIDAS SON, EN TODOS LOS CASOS, LAS CANÓNICAS Y LAS PARAMÉTRICAS. I) GEOMETRÍA ANALÍTICA EN EL PLANO 1. Determinar y
LOS EJERCICIOS DEBEN RESOLVERSE TAMBIÉN USANDO SOFTWARE MATEMÁTICO. LAS ECUACIONES PEDIDAS SON, EN TODOS LOS CASOS, LAS CANÓNICAS Y LAS PARAMÉTRICAS. I) GEOMETRÍA ANALÍTICA EN EL PLANO 1. Determinar y
ALGEBRA. Escuela Politécnica Superior de Málaga
 ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
ALGEBRA. Escuela Politécnica Superior de Málaga Tema 1. Espacios Vectoriales. Sistemas de ecuaciones. Espacio vectorial. Espacios vectoriales R n. Dependencia e independencia lineal. Base. Matrices y determinantes.
MATEMÁTICAS I Y II CONTENIDOS BACHILLERATO
 MATEMÁTICAS I Y II CONTENIDOS BACHILLERATO BLOQUE 1. PROCESOS, MÉTODOS Y ACTITUDES EN MATEMÁTICAS Los contenidos de este bloque se desarrollan de forma simultánea al resto de los bloques. Resolución de
MATEMÁTICAS I Y II CONTENIDOS BACHILLERATO BLOQUE 1. PROCESOS, MÉTODOS Y ACTITUDES EN MATEMÁTICAS Los contenidos de este bloque se desarrollan de forma simultánea al resto de los bloques. Resolución de
Colegio Saint Benedict / Departamento de Matemática
 Prueba Escrita de matemática / Nivel: Sétimo año 1. Geometría Punto Puntos colineales y no colineales Recta Segmento Semirrecta Rayo Rectas concurrentes Rectas paralelas en el plano Rectas perpendiculares
Prueba Escrita de matemática / Nivel: Sétimo año 1. Geometría Punto Puntos colineales y no colineales Recta Segmento Semirrecta Rayo Rectas concurrentes Rectas paralelas en el plano Rectas perpendiculares
1. Principios Básicos del Modelado de Sólidos
 1. Principios Básicos del Modelado de Sólidos n un mundo real, se tienen tres coordenadas para la representación de un elugar en el espacio, tenemos entonces un espacio tridimensional, donde el objeto
1. Principios Básicos del Modelado de Sólidos n un mundo real, se tienen tres coordenadas para la representación de un elugar en el espacio, tenemos entonces un espacio tridimensional, donde el objeto
DERIVADAS PARCIALES Y APLICACIONES
 CAPITULO IV CALCULO II 4.1 DEFINICIÓN DERIVADAS PARCIALES Y APLICACIONES En cálculo una derivada parcial de una función de diversas variables es su derivada respecto a una de esas variables con las otras
CAPITULO IV CALCULO II 4.1 DEFINICIÓN DERIVADAS PARCIALES Y APLICACIONES En cálculo una derivada parcial de una función de diversas variables es su derivada respecto a una de esas variables con las otras
Gobierno de La Rioja MATEMÁTICAS CONTENIDOS
 CONTENIDOS MATEMÁTICAS 1.- Números reales Distintas ampliaciones de los conjuntos numéricos: números enteros, números racionales y números reales. Representaciones de los números racionales. Forma fraccionaria.
CONTENIDOS MATEMÁTICAS 1.- Números reales Distintas ampliaciones de los conjuntos numéricos: números enteros, números racionales y números reales. Representaciones de los números racionales. Forma fraccionaria.
Unidad III: Curvas en R2 y ecuaciones paramétricas
 Unidad III: Curvas en R2 y ecuaciones paramétricas 2.1 Ecuación paramétrica de la línea recta. La recta constituye una parte fundamental de las matemáticas. Existen numerosas formas de representar una
Unidad III: Curvas en R2 y ecuaciones paramétricas 2.1 Ecuación paramétrica de la línea recta. La recta constituye una parte fundamental de las matemáticas. Existen numerosas formas de representar una
REPASO MATEMÁTICO 1. Operaciones matemáticas. 2. Magnitudes físicas. 3. Factores de conversión. 4. Gráficas. 5. Vectores.
 REPASO MATEMÁTICO 1. Operaciones matemáticas. 2. Magnitudes físicas. 3. Factores de conversión. 4. Gráficas. 5. Vectores. Física 1º bachillerato Repaso matemático 1 1. OPERACIONES MATEMÁTICAS 1.1 Operaciones
REPASO MATEMÁTICO 1. Operaciones matemáticas. 2. Magnitudes físicas. 3. Factores de conversión. 4. Gráficas. 5. Vectores. Física 1º bachillerato Repaso matemático 1 1. OPERACIONES MATEMÁTICAS 1.1 Operaciones
001. Identifica, en un conjunto de números, los que son enteros.
 2.6 Criterios específicos de evaluación. 001. Identifica, en un conjunto de números, los que son enteros. 002. Coloca distintos números naturales y enteros en un diagrama que representa a los conjuntos
2.6 Criterios específicos de evaluación. 001. Identifica, en un conjunto de números, los que son enteros. 002. Coloca distintos números naturales y enteros en un diagrama que representa a los conjuntos
CUARTO DE ESO. MATEMÁTICAS A
 CUARTO DE ESO. MATEMÁTICAS A UNIDAD 1 1.1. Realiza operaciones combinadas con números enteros. 1.2. Realiza operaciones con fracciones. 1.3. Realiza operaciones y simplificaciones con potencias de exponente
CUARTO DE ESO. MATEMÁTICAS A UNIDAD 1 1.1. Realiza operaciones combinadas con números enteros. 1.2. Realiza operaciones con fracciones. 1.3. Realiza operaciones y simplificaciones con potencias de exponente
Contenidos mínimos Criterios de evaluación Ejemplos de preguntas
 Contenidos mínimos Criterios de evaluación Ejemplos de preguntas 1º ESO Números naturales, enteros y decimales: operaciones elementales. Fracciones: operaciones elementales. Potencias de exponente natural.
Contenidos mínimos Criterios de evaluación Ejemplos de preguntas 1º ESO Números naturales, enteros y decimales: operaciones elementales. Fracciones: operaciones elementales. Potencias de exponente natural.
Números. 1. Definir e identificar números primos y números compuestos.
 MINIMOS DE MATEMÁTICAS DE 2º DE E.S.O. 1. Divisibilidad Números 1. Definir e identificar números primos y números compuestos. 2. Manejar con soltura el vocabulario propio de la divisibilidad: a es múltiplo/divisor
MINIMOS DE MATEMÁTICAS DE 2º DE E.S.O. 1. Divisibilidad Números 1. Definir e identificar números primos y números compuestos. 2. Manejar con soltura el vocabulario propio de la divisibilidad: a es múltiplo/divisor
PRÁCTICA 6: PÉNDULO FÍSICO Y MOMENTOS DE INERCIA
 Departamento de Física Aplicada Universidad de Castilla-La Mancha Escuela Técnica Superior Ing. Agrónomos PRÁCTICA 6: PÉNDULO FÍSICO Y MOMENTOS DE INERCIA Materiales * Varilla delgada con orificios practicados
Departamento de Física Aplicada Universidad de Castilla-La Mancha Escuela Técnica Superior Ing. Agrónomos PRÁCTICA 6: PÉNDULO FÍSICO Y MOMENTOS DE INERCIA Materiales * Varilla delgada con orificios practicados
Curso de 3ds Max 2013
 Curso de 3ds Max 2013 DISPONIBLE EN LÍNEA O EN FÍSICO. 132 video tutoriales HD (1280 x 720 px) 8 horas, 42 minutos de duración. https://videocursos.co/cursos/3dsmax/curso-de-3ds-max.html Descripción del
Curso de 3ds Max 2013 DISPONIBLE EN LÍNEA O EN FÍSICO. 132 video tutoriales HD (1280 x 720 px) 8 horas, 42 minutos de duración. https://videocursos.co/cursos/3dsmax/curso-de-3ds-max.html Descripción del
DEFINICIÓN Y VISUALIZACIÓN DE SUPERFICIES RECORTADAS
 DEFINICIÓN Y VISUALIZACIÓN DE SUPERFICIES RECORTADAS Molina Carmona, R.; Puchol García, J.A. y Salas Pérez, F. (*) Dpto. de Tecnología Informática y Computación Dpto. de Informática Universidad de Alicante
DEFINICIÓN Y VISUALIZACIÓN DE SUPERFICIES RECORTADAS Molina Carmona, R.; Puchol García, J.A. y Salas Pérez, F. (*) Dpto. de Tecnología Informática y Computación Dpto. de Informática Universidad de Alicante
FUNDAMENTOS DE MATEMÁTICAS. ISBN: Depósito Legal: M Número de páginas: 487 Tamaño: 21 x 14,6 cm Precio: 23,93
 FUNDAMENTOS DE MATEMÁTICAS ISBN: 978-84-941559-0-1 Depósito Legal: M-20468-2013 Número de páginas: 487 Tamaño: 21 x 14,6 cm Precio: 23,93 FUNDAMENTOS DE MATEMÁTICAS INDICE MATEMÁTICAS BÁSICAS CONJUNTOS
FUNDAMENTOS DE MATEMÁTICAS ISBN: 978-84-941559-0-1 Depósito Legal: M-20468-2013 Número de páginas: 487 Tamaño: 21 x 14,6 cm Precio: 23,93 FUNDAMENTOS DE MATEMÁTICAS INDICE MATEMÁTICAS BÁSICAS CONJUNTOS
INDICE. 88 determinante 36. Familias de líneas rectas Resumen de resultados 96 Capitulo IV
 INDICE Geometría Analítica Plana Capitulo Primero Artículo 1. Introducción 1 2. Segmento rectilíneo dirigido 1 3. Sistema coordenado lineal 3 4. Sistema coordenado en el plano 5 5. Carácter de la geografía
INDICE Geometría Analítica Plana Capitulo Primero Artículo 1. Introducción 1 2. Segmento rectilíneo dirigido 1 3. Sistema coordenado lineal 3 4. Sistema coordenado en el plano 5 5. Carácter de la geografía
ESCUELA PREPARATORIA OFICIAL NO.16 MATERÍA: GEOMETRÍA ANALITICA GUÍA DE ESTUDIO PARA LA ÚLTIMA OPORTUNIDAD DE ACREDITAR LA MATERÍA
 Geometría analítica 1.- Ecuación de la recta 2.- Cónicas 3.-Ecuación de la parábola UNIDAD II: CONICAS (CIRCUNFERENCIA Y PARABOLAS) Una superficie cónica de revolución está engendrada por la rotación de
Geometría analítica 1.- Ecuación de la recta 2.- Cónicas 3.-Ecuación de la parábola UNIDAD II: CONICAS (CIRCUNFERENCIA Y PARABOLAS) Una superficie cónica de revolución está engendrada por la rotación de
Relaciones. Estructuras Discretas. Relaciones. Relaciones en un Conjunto. Propiedades de Relaciones en A Reflexividad
 Estructuras Discretas Relaciones Definición: relación Relaciones Claudio Lobos, Jocelyn Simmonds clobos,jsimmond@inf.utfsm.cl Universidad Técnica Federico Santa María Estructuras Discretas INF 152 Sean
Estructuras Discretas Relaciones Definición: relación Relaciones Claudio Lobos, Jocelyn Simmonds clobos,jsimmond@inf.utfsm.cl Universidad Técnica Federico Santa María Estructuras Discretas INF 152 Sean
TEMARIOS EXAMEN DE ADMISIÓN 2017 EDUCACIÓN BÁSICA Y MEDIA: MATEMÁTICA. Contenido
 TEMARIOS EXAMEN DE ADMISIÓN 2017 1 Básico 1.- Reconocimiento izquierda derecha 2.- Figuras geométricas 3.- Cuerpos geométricos 4.- Establecer patrones 5.- Secuencias temporales 6.- ordinales 7.- Reconocimiento
TEMARIOS EXAMEN DE ADMISIÓN 2017 1 Básico 1.- Reconocimiento izquierda derecha 2.- Figuras geométricas 3.- Cuerpos geométricos 4.- Establecer patrones 5.- Secuencias temporales 6.- ordinales 7.- Reconocimiento
01. Dados varios números, los clasifica en los distintos campos numéricos. 02. Interpreta raíces y las relaciona con su notación exponencial.
 2.6 Criterios específicos de evaluación. 01. Dados varios números, los clasifica en los distintos campos numéricos. 02. Interpreta raíces y las relaciona con su notación exponencial. 03. Conoce la definición
2.6 Criterios específicos de evaluación. 01. Dados varios números, los clasifica en los distintos campos numéricos. 02. Interpreta raíces y las relaciona con su notación exponencial. 03. Conoce la definición
2 o Bachillerato. Conceptos básicos
 Física 2 o Bachillerato Conceptos básicos Movimiento. Cambio de posición de un cuerpo respecto de un punto que se toma como referencia. Cinemática. Parte de la Física que estudia el movimiento de los cuerpos
Física 2 o Bachillerato Conceptos básicos Movimiento. Cambio de posición de un cuerpo respecto de un punto que se toma como referencia. Cinemática. Parte de la Física que estudia el movimiento de los cuerpos
ATOMO DE HIDROGENO. o = permitividad al vacío = 8.85 X C 2 N -1 cm -1. = metros. F = Newtons 2. Ó (3)
") ATOMO DE HIDROGENO I. Atomo de hidrógeno A. Descripción del sistema: Dos partículas que interaccionan por atracción de carga eléctrica y culómbica. 1. Ley de coulomb: a. En el sistema cgs en unidades de
ATOMO DE HIDROGENO I. Atomo de hidrógeno A. Descripción del sistema: Dos partículas que interaccionan por atracción de carga eléctrica y culómbica. 1. Ley de coulomb: a. En el sistema cgs en unidades de
MECÁNICA CLÁSICA CINEMATICA. FAyA Licenciatura en Química Física III año 2006
 Física III año 26 CINEMATICA MECÁNICA CLÁSICA La cinemática estudia el movimiento de los cuerpos, sin tener en cuenta las causas que lo producen. Antes de continuar establezcamos la diferencia entre un
Física III año 26 CINEMATICA MECÁNICA CLÁSICA La cinemática estudia el movimiento de los cuerpos, sin tener en cuenta las causas que lo producen. Antes de continuar establezcamos la diferencia entre un