Inicialmente, sin aplicar ninguna corriente a las bobinas (que también reciben el nombre de fases) y con M en una posición cualquiera, el imán
|
|
|
- Sara Reyes Calderón
- hace 8 años
- Vistas:
Transcripción
1
2 FUNCIONAMIENTO motor paso a paso es un dispositivo electromecánico que convierte una serie de impulsos eléctricos en desplazamientos angulares discretos, lo que significa es que es capaz de avanzar una serie de grados (paso) dependiendo de sus entradas de control. El motor paso a paso se comporta de la misma manera que un conversión digital-analógica y puede ser gobernado por impulsos procedentes de sistemas lógicos. funcionamiento

3 Inicialmente, sin aplicar ninguna corriente a las bobinas (que también reciben el nombre de fases) y con M en una posición cualquiera, el imán permanecerá en reposo si no se somete a una fuerza externa. Si se hace circula corriente por ambas fases como se muestra en la Figura 1(a), se crearán dos polos magnéticos NORTE en la parte interna, bajo cuya influencia M se desplazará hasta la posición indicada en dicha figura.

4 . Control de las bobinas Para el control del motor paso a paso de este tipo (bipolar), se establece el principio de puente en H, si se activan T1 y T4, permiten la alimentación en un sentido; si cambiamos el sentido de la alimentación activando T2 y T3, cambiaremos el sentido de alimentación y el sentido de la corriente. Topología de "puente en H" para las bobinas A y B

5 DRIVERS DE LOS MOTORES PASO A PASO asystep 1000 es un circuito de potencia que permite a cualquier microprocesador controlar directamente un motor a paso a paso de hasta 35v y 3 Amp por fase. A diferencia del Easy Step 3000 que es un controlador inteligente, el modelo 1000 es solamente un módulo de potencia basado en transistores MOSFETS de alta velocidad y corriente lo que permite un control total del motor incluyendo micro pasos

6 xisten dos formas básicas de hacer funcional los motores paso a paso atendiendo al avance del rotor bajo cada impulso de excitación: Paso completo (full step): El rotor avanza un paso completo por cada pulso de excitación y para ello su secuencia ha de ser la correspondiente a la expuesta anteriormente, para un motor como el de la Figura 2, y que es presentada de forma resumida en la Tabla 1 para ambos sentidos de giro, las X indican los interruptores que deben estar cerrados (interruptores en ON), mientras que la ausencia de X indica interruptor abierto (interruptores en OFF). Paso S1 S2 S3 S4 Paso S1 S2 S3 S4 1 X X 1 X X 2 X X 2 X X 3 X X 3 X X 4 X X 4 X X 1 X X 1 X X Sentido horario (a) Sentido antihorario (b)
.")
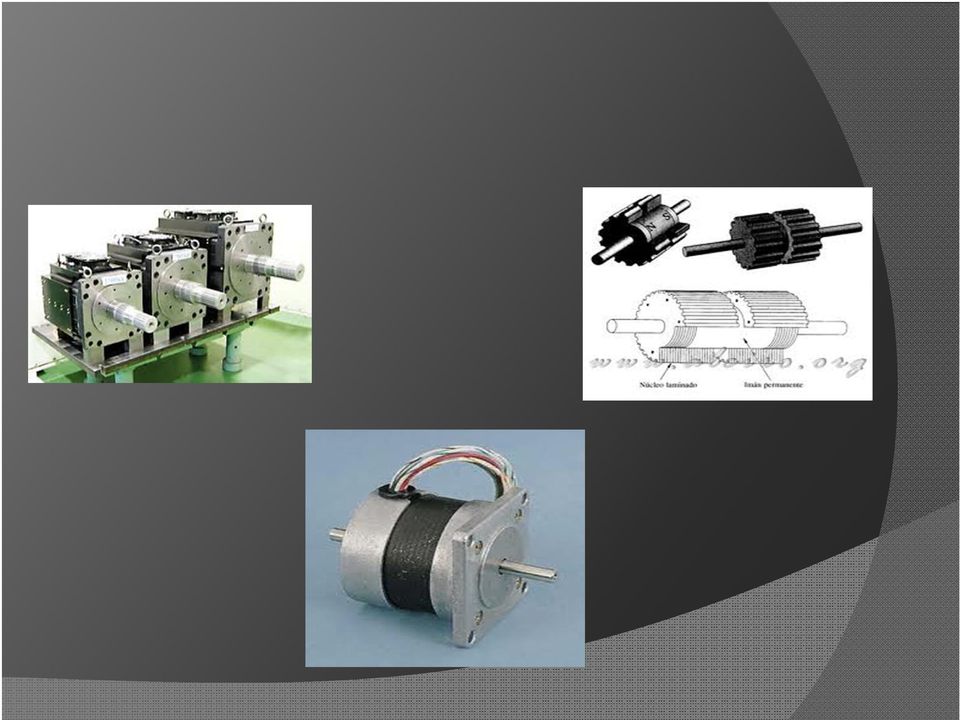
7 TIPOS DE MOTORES PASO A PASO El motor de paso de rotor de imán permanente: Permite mantener un par diferente de cero cuando el motor no está energizado. Dependiendo de la construcción del motor, es típicamente posible obtener pasos angulares de 7.5, 11.25, 15, 18, 45 o 90. El ángulo de rotación se determina por el número de polos en el estator El motor de paso de reluctancia variable (VR): Tiene un rotor multipolar de hierro y un estator devanado laminado, y rota cuando los dientes del rotor son atraídos a los dientes del estator electromagnéticamente energizados15el motor híbrido de paso: Se caracteriza por tener varios dientes en el estator y en el rotor, el rotor con un imán concéntrico magnetizado axialmente alrededor de su eje. Motores paso a paso Bipolares: Estos tienen generalmente 4 cables de salida. en la secuencia apropiada para realizar un movimiento. Motores paso a paso unipolares: estos motores suelen tener 5 ó 6 cables de salida dependiendo de su conexionado interno. Este tipo se caracteriza por ser más simple de controlar, aire.

8 Motores Unipolares: En este tipo de motores, todas las bobinas del estator están conectadas en serie formando cuatro grupos. Esta a su vez, se conectan dos a dos, también en serie, y se montan sobre dos estatores diferentes, Motores Bipolares: En este tipo de motores las bobinas del estator se conectan en serie formando solamente dos grupos, que se montan sobre dos estatores, tal y como se muestra en la Figura 4.

9 APLICASIONES DE LOS MOTORES PASO A PASO Taxímetros. Disk-drive. Impresoras. Plotters. Brazo y Robots completos. Patrón mecánico de velocidad angular. Registradores XY. Relojes Eléctricos. Casetes Digitales. Control Remoto. Máquinas de escribir electrónicas. Manipuladores. Posicionamiento de válvulas en controles industriales. Posicionamiento de piezas en general. Bombas impelentes en aplicaciones de electromedicina.

10
11
12

13 SERVO MOTORES Un servomotor (también llamado servo) es un dispositivo similar a un motor de corriente continua que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación, y mantenerse estable en dicha posición. 1 Un servomotor es un motor eléctrico que consta con la capacidad de ser controlado, tanto en velocidad como en posición.

14 CARACTERISTICAS Está conformado por un motor, una caja reductora un circuito de control. Un seorarvo normal o estándar tiene 3kg por cm. de torque, lo cual es bastante fuerte para su tamaño. También potencia proporcional para cargas mecánicas. Un servo, por consiguiente, tiene un consumo de energía reducido. La corriente que requiere depende del tamaño del servo. Normalmente el fabricante indica cual es la corriente que consume. La corriente depende principalmente del par, y puede exceder un amperio si el servo está enclavado, pero no es muy alto si el servo está libre moviéndose todo el tiempo.

15 CONTROLADORES Los servomotores hacen uso de la modulación por ancho d pulsos (PWM) para controlar la dirección o posición de los motores de corriente continua. La mayoría trabaja en la frecuencia de los cincuenta hercios, así las señales PWM tendrán un periodo de veinte milisegundos. La electrónica dentro del servomotor responderá al ancho de la señal modulada. Si los circuitos dentro del servomotor reciben una señal de entre 0,5 a 1,4 milisegundos, este se moverá en sentido horario; entre 1,6 a 2 milisegundos moverá el servomotor en sentido anti horario; 1,5 milisegundos representa un estado neutro para los servomotores estándares. A continuación se exponen ejemplos de cada caso: Señal de ancho de pulso modulado: Motor en sentido horario (ejemplo 0,7 ms): Motor neutral (1,5ms): Motor en sentido anti horario (ejemplo 1,8ms):

16 CIRCUITO DRIVER DEL SERVO La que se proporciona aquí es una versión. Puede usarse para jugar con servos, para verificar que funcionan, o para conectarle servos a un Robot. Lo primero para este montaje es encontrar los pulsos requeridos con un osciloscopio para programarlo en un microcontrolador.

17 Se usa un integrado "Timer" 555. El nombre usual es NE555 o LM555, pero casi todos fabricantes de IC s lo han hecho. A veces también es listado como Este circuito se encuentra en las hojas de datos de los manuales ECG, National, Motorola u otros, con los valores de resistencias/condensadores calculados con las fórmulas precisas. La única diferencia es la presencia del potenciómetro P1, que cambia el tiempo cuando se gira..

18 TIPOS DE SERVOMOTORES -Servomotores de CC -Servomotores de AC -Servomotores de imanes permanentes o Brushless.

19 Tiene además de los circuitos de control un potenciómetro conectado al eje central del motor. Este potenciómetro permite a la circuitería de control, supervisar el ángulo actual del servo motor. Si el eje está en el ángulo correcto, entonces el motor está apagado. Si el circuito chequea que el ángulo no es correcto, el motor volverá a la dirección correcta, hasta llegar al ángulo que es correcto. El eje del servo es capaz de llegar alrededor de los 180 grados. Normalmente, en algunos llega a los 210 grados, pero varía según el fabricante.

20 APLICACIONES En la práctica, se usan servos para posicionar superficies de control como el movimiento de palancas, pequeños ascensores y timones. Ellos también se usan en radio control, títeres, y por supuesto la práctica, se usan servos para posicionar superficies de control como el movimiento de palancas, pequeños ascensores y timones. Ellos también se usan en radio control, títeres, y por supuesto, en robos servo motores son utilizados en las más variadas aplicaciones industriales donde una elevada dinámica, control de par, precisión de velocidad y posicionamiento son factores decisivos para el aumento de la calidad y productividad. Poseen todas estas características aliadas a un bajo costo, elevado desempeño y robustez.

21
22
23
SERVOMOTORES. Los servos se utilizan frecuentemente en sistemas de radiocontrol, mecatrónicos y robótica, pero su uso no está limitado a estos.
 SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9
 Por Guillermo Martín Díaz Alumno de: 1º Ingeniería Informática Curso 2005/2006 ËQGLFH Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9 2 0RWRUHVGH&RUULHQWHFRQWLQXD Son los mas
Por Guillermo Martín Díaz Alumno de: 1º Ingeniería Informática Curso 2005/2006 ËQGLFH Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9 2 0RWRUHVGH&RUULHQWHFRQWLQXD Son los mas
Control de motor de pasos Para Pic12C508
 Control de motor de pasos Para Pic12C508 Entre los innumerables tipos de motores, los de pasos son quizás los consentidos de los aficionados y profesionales de la electrónica y también de la robótica.
Control de motor de pasos Para Pic12C508 Entre los innumerables tipos de motores, los de pasos son quizás los consentidos de los aficionados y profesionales de la electrónica y también de la robótica.
GUÍA DE USUARIO Motor paso a paso REV. 1.0
 GUÍA DE USUARIO Motor paso a paso REV. 1.0 Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. +56 2 23339579 www.olimex.cl cursos.olimex.cl info@olimex.cl GUÍA DE USUARIO:
GUÍA DE USUARIO Motor paso a paso REV. 1.0 Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. +56 2 23339579 www.olimex.cl cursos.olimex.cl info@olimex.cl GUÍA DE USUARIO:
El control de motores para los microrrobots
 SEMINARIO DE DISEÑO Y CONSTRUCCIÓN DE MICRORROBOTS El control de motores para los microrrobots TRABAJO REALIZADO POR: Felipe Antonio Barreno Herrera. Estudiante de Ing. Téc. Industrial esp. Electrónica
SEMINARIO DE DISEÑO Y CONSTRUCCIÓN DE MICRORROBOTS El control de motores para los microrrobots TRABAJO REALIZADO POR: Felipe Antonio Barreno Herrera. Estudiante de Ing. Téc. Industrial esp. Electrónica
Actuadores Motor de corriente continua
 Introducción a la electrónica industrial Patricio G. Donato Jonatan Fischer Noelia Echeverría Nahuel Dalgaard Laboratorio de Instrumentación y Control (LIC) Introducción a la electrónica industrial 1 Esquema
Introducción a la electrónica industrial Patricio G. Donato Jonatan Fischer Noelia Echeverría Nahuel Dalgaard Laboratorio de Instrumentación y Control (LIC) Introducción a la electrónica industrial 1 Esquema
99 + % de toda la potencia está generada por máquinas síncronas. Las Máquinas Síncronas pueden funcionar como generadores o como motores
 Motor de Corriente Alterna (AC) Síncrono: S 99 + % de toda la potencia está generada por máquinas síncronas Las Máquinas Síncronas pueden funcionar como generadores o como motores Motores Síncronos Este
Motor de Corriente Alterna (AC) Síncrono: S 99 + % de toda la potencia está generada por máquinas síncronas Las Máquinas Síncronas pueden funcionar como generadores o como motores Motores Síncronos Este
MOTORES DE PASSO MAX SUELL DUTRA JOHN FABER ARCHILA 2008
 MOTORES DE PASSO MAX SUELL DUTRA JOHN FABER ARCHILA 2008 AGENDA DEFINIÇÃO. FUNCIONAMENTO CLASSIFICAÇÃO. CARACTERISTICAS TECNICAS. APLICAÇÕES Um motor de passo é um tipo de motor elétrico que é usado quando
MOTORES DE PASSO MAX SUELL DUTRA JOHN FABER ARCHILA 2008 AGENDA DEFINIÇÃO. FUNCIONAMENTO CLASSIFICAÇÃO. CARACTERISTICAS TECNICAS. APLICAÇÕES Um motor de passo é um tipo de motor elétrico que é usado quando
Capítulo V Motores eléctricos
 Capítulo V Motores eléctricos Hay dos cosas infinitas: el Universo y la estupidez humana. Y del Universo no estoy seguro. Albert Einstein Diseño y construcción de un robot de vigilancia con paralizador
Capítulo V Motores eléctricos Hay dos cosas infinitas: el Universo y la estupidez humana. Y del Universo no estoy seguro. Albert Einstein Diseño y construcción de un robot de vigilancia con paralizador
UD. 4 MAQUINAS ELECTRICAS ELECTROTECNIA APLICADA A LA INGENIERIA MECÁNICA
 ELECTROTECNIA APLICADA A LA INGENIERIA MECÁNICA UD. 4 MAQUINAS ELECTRICAS Descripción: Principios de electromagnetismo y funcionamiento y aplicaciones de las diferentes máquinas eléctricas. 1 Tema 4.4.
ELECTROTECNIA APLICADA A LA INGENIERIA MECÁNICA UD. 4 MAQUINAS ELECTRICAS Descripción: Principios de electromagnetismo y funcionamiento y aplicaciones de las diferentes máquinas eléctricas. 1 Tema 4.4.
Una vez descrita la constitución general de un robot, podemos empezar con la
 CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
Universidad Nacional Autónoma de México E N E P A R A G O N. Laboratorio de. Control Digital. Motor de Paso a Paso. Motores Paso a Paso
 Universidad Nacional Autónoma de México E N E P A R A G O N Laboratorio de Control Digital Motor de Paso a Paso Motores Paso a Paso Un motor paso a paso es un tipo especial de motor sincrónico diseñado
Universidad Nacional Autónoma de México E N E P A R A G O N Laboratorio de Control Digital Motor de Paso a Paso Motores Paso a Paso Un motor paso a paso es un tipo especial de motor sincrónico diseñado
Máquinas Eléctricas. Sistema Eléctrico. Maquina Eléctrica. Sistema Mecánico. Flujo de energía como MOTOR. Flujo de energía como GENERADOR
 Máquinas Eléctricas Las máquinas eléctricas son convertidores electromecánicos capaces de transformar energía desde un sistema eléctrico a un sistema mecánico o viceversa Flujo de energía como MOTOR Sistema
Máquinas Eléctricas Las máquinas eléctricas son convertidores electromecánicos capaces de transformar energía desde un sistema eléctrico a un sistema mecánico o viceversa Flujo de energía como MOTOR Sistema
Ensayos Básicos con las Máquinas Eléctricas Didácticas EXPERIMENTOS CON LAS MÁQUINAS ELÉCTRICAS
 Ensayos Básicos con las Máquinas Eléctricas Didácticas EXPERIMENTOS CON LAS MÁQUINAS ELÉCTRICAS Experimentos con Máquinas Eléctricas Didácticas 2 ÍNDICE 1 Introducción...3 2 Máquinas de Corriente Continua...4
Ensayos Básicos con las Máquinas Eléctricas Didácticas EXPERIMENTOS CON LAS MÁQUINAS ELÉCTRICAS Experimentos con Máquinas Eléctricas Didácticas 2 ÍNDICE 1 Introducción...3 2 Máquinas de Corriente Continua...4
Lección 2: Magnetismo
 : Magnetismo : Magnetismo Introducción Esta lección describe la naturaleza del magnetismo y el uso de los imanes en varios componentes eléctricos para producir y controlar la electricidad. Objetivos Al
: Magnetismo : Magnetismo Introducción Esta lección describe la naturaleza del magnetismo y el uso de los imanes en varios componentes eléctricos para producir y controlar la electricidad. Objetivos Al
Elementos motores. Automatización y Robótica. Elementos Motores
 Elementos motores Misión: Generar el movimiento del robot según las órdenes dadas por la unidad de control. Tipos: Neumáticos (cilindros y motores). Hidráulicos (cilindros y motores). Eléctricos (motores
Elementos motores Misión: Generar el movimiento del robot según las órdenes dadas por la unidad de control. Tipos: Neumáticos (cilindros y motores). Hidráulicos (cilindros y motores). Eléctricos (motores
4. Tipos de servomotores. Clasificación según su topología:
 4. Tipos de servomotores. Clasificación según su topología: Motor Inducido de Tres fases AC Motor Tipo Brush DC Brushless Servo Motor (AC & DC) Motor Paso a Paso SwitchedReluctance Motors Motor Lineal
4. Tipos de servomotores. Clasificación según su topología: Motor Inducido de Tres fases AC Motor Tipo Brush DC Brushless Servo Motor (AC & DC) Motor Paso a Paso SwitchedReluctance Motors Motor Lineal
Motores paso a paso (PAP) Instrumentación y Comunicaciones Industriales
 Instrumentación y Comunicaciones Industriales") Motores paso a paso (PAP) 1 Ventajas El ángulo de rotación es proporcional a los pulsos de entrada. Exactitud en la posición y repetición de movimientos. Los motores PaP tienen un error de 3 a 5% del paso
Motores paso a paso (PAP) 1 Ventajas El ángulo de rotación es proporcional a los pulsos de entrada. Exactitud en la posición y repetición de movimientos. Los motores PaP tienen un error de 3 a 5% del paso
CAPITULO 4. Inversores para control de velocidad de motores de
 CAPITULO 4. Inversores para control de velocidad de motores de inducción mediante relación v/f. 4.1 Introducción. La frecuencia de salida de un inversor estático está determinada por la velocidad de conmutación
CAPITULO 4. Inversores para control de velocidad de motores de inducción mediante relación v/f. 4.1 Introducción. La frecuencia de salida de un inversor estático está determinada por la velocidad de conmutación
EducaBot. Motores y movilidad.
 CURSO PROVINCIAL: CONTROL Y ROBÓTICA EN TECNOLOGÍA ROBÓTICA EDUCATIVA EducaBot. Motores y movilidad. Manuel Hidalgo Díaz Antonio Martínez Núñez Noviembre 2009 EducaBot 1ª fase. Terminado la placa de conexionado
CURSO PROVINCIAL: CONTROL Y ROBÓTICA EN TECNOLOGÍA ROBÓTICA EDUCATIVA EducaBot. Motores y movilidad. Manuel Hidalgo Díaz Antonio Martínez Núñez Noviembre 2009 EducaBot 1ª fase. Terminado la placa de conexionado
Inversores De Frecuencia
 Inversores De Frecuencia QUÉ ES UN INVERSOR? Un inversor es un control para motores, que hace variar la velocidad a motores C.A. De inducción. Esta variación la logra variando la frecuencia de alimentación
Inversores De Frecuencia QUÉ ES UN INVERSOR? Un inversor es un control para motores, que hace variar la velocidad a motores C.A. De inducción. Esta variación la logra variando la frecuencia de alimentación
AUTOMATIZACIÓN INDUSTRIAL DESCRIPCIÓN Y MANEJO DEL SERVOMOTOR DE PRÁCTICAS
 3º INGENIERÍA TÉCNICA INDUSTRIAL, ESPECIALIDAD MECÁNICA AUTOMATIZACIÓN INDUSTRIAL PRÁCTICA 5 DESCRIPCIÓN Y MANEJO DEL SERVOMOTOR DE PRÁCTICAS OBJETIVOS DE LA PRÁCTICA Identificar sobre un montaje real
3º INGENIERÍA TÉCNICA INDUSTRIAL, ESPECIALIDAD MECÁNICA AUTOMATIZACIÓN INDUSTRIAL PRÁCTICA 5 DESCRIPCIÓN Y MANEJO DEL SERVOMOTOR DE PRÁCTICAS OBJETIVOS DE LA PRÁCTICA Identificar sobre un montaje real
ELEL10. Fuerza contraelectromotriz (fcem)
") Los motores de corriente directa transforman la energía eléctrica en energía mecánica. Impulsan dispositivos tales como malacates, ventiladores, bombas, calandrias, prensas, preforadores y carros. Estos
Los motores de corriente directa transforman la energía eléctrica en energía mecánica. Impulsan dispositivos tales como malacates, ventiladores, bombas, calandrias, prensas, preforadores y carros. Estos
MÁQUINAS ELÉCTRICAS: MOTORES
 MÁQNAS ELÉCTRCAS: MOTORES Se denomina máquina eléctrica a todo dispositivo capaz de generar, transformar o aprovechar la energía eléctrica. Según esto podemos clasificar las máquinas eléctricas en tres
MÁQNAS ELÉCTRCAS: MOTORES Se denomina máquina eléctrica a todo dispositivo capaz de generar, transformar o aprovechar la energía eléctrica. Según esto podemos clasificar las máquinas eléctricas en tres
El motor eléctrico. Física. Liceo integrado de zipaquira MOTOR ELECTRICO
 El motor eléctrico Física Liceo integrado de zipaquira MOTOR ELECTRICO Motores y generadores eléctricos, grupo de aparatos que se utilizan para convertir la energía mecánica en eléctrica, o a la inversa,
El motor eléctrico Física Liceo integrado de zipaquira MOTOR ELECTRICO Motores y generadores eléctricos, grupo de aparatos que se utilizan para convertir la energía mecánica en eléctrica, o a la inversa,
Mediciones Eléctricas
 Mediciones Eléctricas Grupos Electrógenos Mediciones Eléctricas Página 1 de 12 Tabla de Contenido Objetivo 1: Medidas de magnitudes eléctricas... 3 Objetivo 2: Generalidades sobre instrumentos de medición...
Mediciones Eléctricas Grupos Electrógenos Mediciones Eléctricas Página 1 de 12 Tabla de Contenido Objetivo 1: Medidas de magnitudes eléctricas... 3 Objetivo 2: Generalidades sobre instrumentos de medición...
Control electrónico de Motores: Conceptos Arranque motores AC Control electrónico de motores DC Control electrónicos motores AC
 Universidad de Jaén Escuela Politécnica Superior Electrónica Industrial Control electrónico de Motores: Conceptos Arranque motores AC Control electrónico de motores DC Control electrónicos motores AC 19/11/2007
Universidad de Jaén Escuela Politécnica Superior Electrónica Industrial Control electrónico de Motores: Conceptos Arranque motores AC Control electrónico de motores DC Control electrónicos motores AC 19/11/2007
Circuitos, Sensores y Actuadores
 Capítulo 3 Circuitos, Sensores y Actuadores 3.1. Introducción En el siguiente capítulo se hablará acerca del circuito a utilizar en nuestra mano, para que el sistema de control por flexión funcione, el
Capítulo 3 Circuitos, Sensores y Actuadores 3.1. Introducción En el siguiente capítulo se hablará acerca del circuito a utilizar en nuestra mano, para que el sistema de control por flexión funcione, el
Capítulo 3. Magnetismo
 Capítulo 3. Magnetismo Todos hemos observado como un imán atrae objetos de hierro. La razón por la que ocurre este hecho es el magnetismo. Los imanes generan un campo magnético por su naturaleza. Este
Capítulo 3. Magnetismo Todos hemos observado como un imán atrae objetos de hierro. La razón por la que ocurre este hecho es el magnetismo. Los imanes generan un campo magnético por su naturaleza. Este
El motor de reluctancia conmutado - Un motor eléctrico con gran par motor y poco volumen
 El motor de reluctancia conmutado - Un motor eléctrico con gran par motor y poco volumen J. Wolff, G. Gómez Funcionamiento El principio de funcionamiento del motor de reluctancia conmutado, que en muchas
El motor de reluctancia conmutado - Un motor eléctrico con gran par motor y poco volumen J. Wolff, G. Gómez Funcionamiento El principio de funcionamiento del motor de reluctancia conmutado, que en muchas
PRÁCTICAS DE ELECTRICIDAD CON CROCODILE CLIPS.
 PRÁCTICAS DE ELECTRICIDAD CON CROCODILE CLIPS. Repaso de electricidad (1). Circuito eléctrico. Arranca Crocodile Clips y presta atención a la explicación del profesor. Él te guiará y te enseñará la electricidad,
PRÁCTICAS DE ELECTRICIDAD CON CROCODILE CLIPS. Repaso de electricidad (1). Circuito eléctrico. Arranca Crocodile Clips y presta atención a la explicación del profesor. Él te guiará y te enseñará la electricidad,
CONTROLES ELÉCTRICOS PRACTICA # 1: RELEVADOR Y CONTACTOR LIRA MARTINEZ MANUEL ALEJANDRO
 CONTROLES ELÉCTRICOS PRACTICA # 1: RELEVADOR Y CONTACTOR LIRA MARTINEZ MANUEL ALEJANDRO ENTREGA: 8/31/2010 INTRODUCCIÓN El control eléctrico es básicamente establecer acciones deseadas con la ayuda de
CONTROLES ELÉCTRICOS PRACTICA # 1: RELEVADOR Y CONTACTOR LIRA MARTINEZ MANUEL ALEJANDRO ENTREGA: 8/31/2010 INTRODUCCIÓN El control eléctrico es básicamente establecer acciones deseadas con la ayuda de
MÁQUINAS ELECTRICAS DE C.C y C.A.. ELECTROMECANICA UNIDAD 4 Generadores de Corriente Continua. Partes de una maquina eléctrica de corriente continua.
 Página19 UNIDAD 4 Generadores de Corriente Continua. Introducción En la actualidad, la generación de C.C. se realiza mediante pilas y acumuladores o se obtiene de la conversión de C.A. a C.C. mediante
Página19 UNIDAD 4 Generadores de Corriente Continua. Introducción En la actualidad, la generación de C.C. se realiza mediante pilas y acumuladores o se obtiene de la conversión de C.A. a C.C. mediante
6º Tema.- Accionamientos y actuadores eléctricos.
 Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 6º Tema.- Accionamientos y actuadores eléctricos. Huelva, Noviembre 2008 Profesor: Rafael Sánchez Sánchez Página 1 de
Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 6º Tema.- Accionamientos y actuadores eléctricos. Huelva, Noviembre 2008 Profesor: Rafael Sánchez Sánchez Página 1 de
Unidad didáctica: Electromagnetismo
 Unidad didáctica: Electromagnetismo CURSO 3º ESO 1 ÍNDICE Unidad didáctica: Electromagnetismo 1.- Introducción al electromagnetismo. 2.- Aplicaciones del electromagnetismo. 2.1.- Electroimán. 2.2.- Relé.
Unidad didáctica: Electromagnetismo CURSO 3º ESO 1 ÍNDICE Unidad didáctica: Electromagnetismo 1.- Introducción al electromagnetismo. 2.- Aplicaciones del electromagnetismo. 2.1.- Electroimán. 2.2.- Relé.
PRINCIPIOS DE FUNCIONAMIENTO.
 SENSORES INDUCTIVOS PRINCIPIOS DE FUNCIONAMIENTO. El objetivo de esta sección es conocer que son los sensores de Proximidad Inductivos y cuál es su principio de funcionamiento. OBJETIVO Al término de esta
SENSORES INDUCTIVOS PRINCIPIOS DE FUNCIONAMIENTO. El objetivo de esta sección es conocer que son los sensores de Proximidad Inductivos y cuál es su principio de funcionamiento. OBJETIVO Al término de esta
SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética.
 SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética. A diferencia de los sistemas monofásicos de C.A., estudiados hasta ahora, que utilizan dos conductores
SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética. A diferencia de los sistemas monofásicos de C.A., estudiados hasta ahora, que utilizan dos conductores
Figura 1. Servomotores
 DISEÑO Y CONSTRUCCIÓN DE UNA MESA POSICIONADORA DE SOLDADURA EN DOS EJES PARA EL BRAZO ROBÓTICO KUKA KR5ARC DEL LABORATORIO DE ROBÓTICA INDUSTRIAL DE LA ESPE EXTENSIÓN LATACUNGA Autores: Investigador Principal:
DISEÑO Y CONSTRUCCIÓN DE UNA MESA POSICIONADORA DE SOLDADURA EN DOS EJES PARA EL BRAZO ROBÓTICO KUKA KR5ARC DEL LABORATORIO DE ROBÓTICA INDUSTRIAL DE LA ESPE EXTENSIÓN LATACUNGA Autores: Investigador Principal:
Tema 7. MOTORES ELÉCTRICOS DE CORRIENTE CONTINUA
 Tema 7. MOTORES ELÉCTRICOS DE CORRIENTE CONTINUA 1. MAGNETISMO Y ELECTRICIDAD...2 Fuerza electromotriz inducida (Ley de inducción de Faraday)...2 Fuerza electromagnética (2ª Ley de Laplace)...2 2. LAS
Tema 7. MOTORES ELÉCTRICOS DE CORRIENTE CONTINUA 1. MAGNETISMO Y ELECTRICIDAD...2 Fuerza electromotriz inducida (Ley de inducción de Faraday)...2 Fuerza electromagnética (2ª Ley de Laplace)...2 2. LAS
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION
 CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
MOTORES ASÍNCRONOS MONOFÁSICOS
 MOTORES ASÍNCRONOS MONOFÁSICOS INTRODUCCIÓN Los motores monofásicos, como su propio nombre indica son motores con un solo devanado en el estator, que es el devanado inductor. Prácticamente todas las realizaciones
MOTORES ASÍNCRONOS MONOFÁSICOS INTRODUCCIÓN Los motores monofásicos, como su propio nombre indica son motores con un solo devanado en el estator, que es el devanado inductor. Prácticamente todas las realizaciones
ANTECEDENTES TEÓRICOS. EL OSCILOSCOPIO Puesta en funcionamiento
 ANTECEDENTES TEÓRICOS EL OSCILOSCOPIO Puesta en funcionamiento Poner a tierra Una buena conexión a tierra es muy importante para realizar medidas con un osciloscopio. Colocar a tierra el Osciloscopio Por
ANTECEDENTES TEÓRICOS EL OSCILOSCOPIO Puesta en funcionamiento Poner a tierra Una buena conexión a tierra es muy importante para realizar medidas con un osciloscopio. Colocar a tierra el Osciloscopio Por
Descripción de Motores eléctricos
 Descripción de Motores eléctricos Funcionamiento «Transforma la energía eléctrica en mecánica por medio de campos magnéticos» Rotor Campos magnéticos formador por: Bobinas Imanes permanentes Materiales
Descripción de Motores eléctricos Funcionamiento «Transforma la energía eléctrica en mecánica por medio de campos magnéticos» Rotor Campos magnéticos formador por: Bobinas Imanes permanentes Materiales
TEMA 2. ESQUEMAS ELÉCTRICOS (II)
") TEMA 2. Esquemas eléctricos (II) 1 TEMA 2. ESQUEMAS ELÉCTRICOS (II) 1. SÍMBOLOS Y ESQUEMAS ELÉCTRICOS EN LAS NORMAS UNE EN 60.617...2 1.1. DISPOSITIVOS DE CONMUTACIÓN DE POTENCIA...2 1.1.1. Contactor...2
TEMA 2. Esquemas eléctricos (II) 1 TEMA 2. ESQUEMAS ELÉCTRICOS (II) 1. SÍMBOLOS Y ESQUEMAS ELÉCTRICOS EN LAS NORMAS UNE EN 60.617...2 1.1. DISPOSITIVOS DE CONMUTACIÓN DE POTENCIA...2 1.1.1. Contactor...2
Unas cuantas palabras acerca de los alternadores trifásicos
 Rincón Técnico Unas cuantas palabras acerca de los alternadores trifásicos Autores: El contenido de este artículo fue tomado del Electrical Engineering Portal Elaboración técnica: Esta publicación ha sido
Rincón Técnico Unas cuantas palabras acerca de los alternadores trifásicos Autores: El contenido de este artículo fue tomado del Electrical Engineering Portal Elaboración técnica: Esta publicación ha sido
Fig. 3.1 Brazo Mecánico Utilizado. que es capaz de girar igualmente 180º, (Fig. 3.1).
.") Capítulo 3 El Brazo Mecánico. En este capítulo se hablará de los aspectos generales del robot, en cuanto a su arquitectura respecta. Es importante dar crédito al Ing. Luís Maus Bolaños del departamento
Capítulo 3 El Brazo Mecánico. En este capítulo se hablará de los aspectos generales del robot, en cuanto a su arquitectura respecta. Es importante dar crédito al Ing. Luís Maus Bolaños del departamento
Características Morfológicas. Principales características de los Robots.
 Características Morfológicas Principales características de los Robots. Se describen las características más relevantes propias de los robots y se proporcionan valores concretos de las mismas, para determinados
Características Morfológicas Principales características de los Robots. Se describen las características más relevantes propias de los robots y se proporcionan valores concretos de las mismas, para determinados
INSTRUMENTACIÓN Y COMUNICACIONES INDUSTRIALES. Motores Paso a Paso
 INSTRUMENTACIÓN Y COMUNICACIONES INDUSTRIALES El presente trabajo es parte de un Proyecto realizado por los alumnos: Cristian Botteri, Gabriel Gandolfi, Juan Pablo San Martin y Leandro Iglesias quienes
INSTRUMENTACIÓN Y COMUNICACIONES INDUSTRIALES El presente trabajo es parte de un Proyecto realizado por los alumnos: Cristian Botteri, Gabriel Gandolfi, Juan Pablo San Martin y Leandro Iglesias quienes
Corriente Alterna: actividades complementarias
 Corriente Alterna: actividades complementarias Transformador Dispositivo eléctrico que permite aumentar o disminuir la tensión en un circuito eléctrico de corriente alterna. Para el caso de un transformador
Corriente Alterna: actividades complementarias Transformador Dispositivo eléctrico que permite aumentar o disminuir la tensión en un circuito eléctrico de corriente alterna. Para el caso de un transformador
TRANSFORMADORES TRANSFORMADORES
 Sean dos bobinas N 1 y N 2 acopladas magnéticamente. Si la bobina N 1 se conecta a una tensión alterna sinusoidal v 1 se genera en la bobina N 2 una tensión alterna v 2. Las variaciones de flujo en la
Sean dos bobinas N 1 y N 2 acopladas magnéticamente. Si la bobina N 1 se conecta a una tensión alterna sinusoidal v 1 se genera en la bobina N 2 una tensión alterna v 2. Las variaciones de flujo en la
Calidad de la Alimentación Zona de Falla
 Calidad de la Alimentación Zona de Falla La calidad de la alimentación se focaliza en la condición del voltaje y la corriente en el circuito de un motor. Una pobre calidad de la alimentación afecta enormemente
Calidad de la Alimentación Zona de Falla La calidad de la alimentación se focaliza en la condición del voltaje y la corriente en el circuito de un motor. Una pobre calidad de la alimentación afecta enormemente
PLAN DE RECUPERACIÓN DE MATERIAS PENDIENTES
 PLAN DE RECUPERACIÓN DE MATERIAS PENDIENTES ACTIVIDADES DE RECUPERACIÓN DE LA ASIGNATURA DE TECNOLOGÍA 3 ESO Los alumnos que tienen pendiente la asignatura de Tecnología de 3º de la ESO encontrándose en
PLAN DE RECUPERACIÓN DE MATERIAS PENDIENTES ACTIVIDADES DE RECUPERACIÓN DE LA ASIGNATURA DE TECNOLOGÍA 3 ESO Los alumnos que tienen pendiente la asignatura de Tecnología de 3º de la ESO encontrándose en
DEFINICIÓN Y PRINCIPIO DE OPERACIÓN
 DEFINICIÓN Y PRINCIPIO DE OPERACIÓN El motor eléctrico es un dispositivo que transforma la energía eléctrica en energía mecánica por medio de la acción de los campos magnéticos generados en sus bobinas.
DEFINICIÓN Y PRINCIPIO DE OPERACIÓN El motor eléctrico es un dispositivo que transforma la energía eléctrica en energía mecánica por medio de la acción de los campos magnéticos generados en sus bobinas.
Arranque del Motor del Automóvil (Viene de sistema eléctrico) Generalidades El motor de combustión interna no tiene arranque propio, hay que hacerlo
 Generalidades El motor de combustión interna no tiene arranque propio, hay que hacerlo") Arranque del Motor del Automóvil (Viene de sistema eléctrico) Generalidades El motor de combustión interna no tiene arranque propio, hay que hacerlo girar con una fuente externa para que se completen los
Arranque del Motor del Automóvil (Viene de sistema eléctrico) Generalidades El motor de combustión interna no tiene arranque propio, hay que hacerlo girar con una fuente externa para que se completen los
Capítulo 1 GESTIÓN DE LA ALIMENTACIÓN
 Capítulo 1 GESTIÓN DE LA ALIMENTACIÓN 1 Introducción En un robot autónomo la gestión de la alimentación es fundamental, desde la generación de energía hasta su consumo, ya que el robot será más autónomo
Capítulo 1 GESTIÓN DE LA ALIMENTACIÓN 1 Introducción En un robot autónomo la gestión de la alimentación es fundamental, desde la generación de energía hasta su consumo, ya que el robot será más autónomo
Control de motores de CC
 Control de motores de CC Control por modulación de ancho de Pulso (PWM) Prof: Bolaños D (versión 1-8-11) Aportes propios y de Internet Uno de los problemas más fundamentales de la robótica es el control
Control de motores de CC Control por modulación de ancho de Pulso (PWM) Prof: Bolaños D (versión 1-8-11) Aportes propios y de Internet Uno de los problemas más fundamentales de la robótica es el control
Tecnología IP para videovigilancia... Los últimos avances han hecho posible conectar cámaras directamente a una red de ordenadores basada en el
 para videovigilancia....... Los últimos avances han hecho posible conectar cámaras directamente a una red de ordenadores basada en el protocolo IP. La tecnología de las cámaras de red permite al usuario
para videovigilancia....... Los últimos avances han hecho posible conectar cámaras directamente a una red de ordenadores basada en el protocolo IP. La tecnología de las cámaras de red permite al usuario
CAPITULO 1. Motores de Inducción.
 CAPITULO 1. Motores de Inducción. 1.1 Introducción. Los motores asíncronos o de inducción, son prácticamente motores trifásicos. Están basados en el accionamiento de una masa metálica por la acción de
CAPITULO 1. Motores de Inducción. 1.1 Introducción. Los motores asíncronos o de inducción, son prácticamente motores trifásicos. Están basados en el accionamiento de una masa metálica por la acción de
TEMA 6. ACCIONAMIENTOS Y SENSORES
 TEMA 6. ACCIONAMIENTOS Y SENSORES ACCIONAMIENTOS. ACC. ELECTRICOS, ACC. NEUMÁTICOS, ACC. HIDRAULICOS SENSORES DE POSICIÓN, DE PRESENCIA, OTROS SENSORES CRITERIOS DE SELECCIÓN ACCIONAMIENTOS TECNOLOGÍA
TEMA 6. ACCIONAMIENTOS Y SENSORES ACCIONAMIENTOS. ACC. ELECTRICOS, ACC. NEUMÁTICOS, ACC. HIDRAULICOS SENSORES DE POSICIÓN, DE PRESENCIA, OTROS SENSORES CRITERIOS DE SELECCIÓN ACCIONAMIENTOS TECNOLOGÍA
Introducción a los sistemas de control
 Introducción a los sistemas de control Sistema Un sistema es una combinación de componentes que actúan juntos y realizan un objetivo determinado A un sistema se le puede considerar como una caja negra
Introducción a los sistemas de control Sistema Un sistema es una combinación de componentes que actúan juntos y realizan un objetivo determinado A un sistema se le puede considerar como una caja negra
Motores Paso a Paso(I) Laboratorio de Ingeniería Eléctrica
 Laboratorio de Ingeniería Eléctrica") Motores Paso a Paso(I) Laboratorio de Ingeniería Eléctrica INTRODUCCIÓN Son motores que reciben un impulso de corriente que transforman en un movimiento preciso del eje paso. Según la secuencia de impulsos
Motores Paso a Paso(I) Laboratorio de Ingeniería Eléctrica INTRODUCCIÓN Son motores que reciben un impulso de corriente que transforman en un movimiento preciso del eje paso. Según la secuencia de impulsos
CRUCIGRAMA #1 HORIZONTAL VERTICAL
 CRUCIGRAMA #1 HORIZONTAL 2. Controla y procesa todas las operaciones dentro del PLC 6. Patento el PLC en 1974. 8. Son dispositivos eléctricos y/o mecánicos que convierten magnitudes físicas en una señal
CRUCIGRAMA #1 HORIZONTAL 2. Controla y procesa todas las operaciones dentro del PLC 6. Patento el PLC en 1974. 8. Son dispositivos eléctricos y/o mecánicos que convierten magnitudes físicas en una señal
Circuito RL, Respuesta a la frecuencia.
 Circuito RL, Respuesta a la frecuencia. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se estudia
Circuito RL, Respuesta a la frecuencia. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se estudia
Manual de operación y mantenimiento para los controladores de la bomba jockey serie FDJ de EATON
 Febrero de 2008 Manual de operación y mantenimiento para los controladores de la bomba jockey serie FDJ de EATON Folleto de instrucciones Folleto de instrucciones FDJP / FDJY Página 2 Vigente: Febrero
Febrero de 2008 Manual de operación y mantenimiento para los controladores de la bomba jockey serie FDJ de EATON Folleto de instrucciones Folleto de instrucciones FDJP / FDJY Página 2 Vigente: Febrero
RODAMIENTO (también denominado rulemán o cojinete)
") RODAMIENTO (también denominado rulemán o cojinete) Es un elemento mecánico que reduce la fricción entre un eje y las piezas conectadas a éste, que le sirve de apoyo y facilita su desplazamiento. En busca
RODAMIENTO (también denominado rulemán o cojinete) Es un elemento mecánico que reduce la fricción entre un eje y las piezas conectadas a éste, que le sirve de apoyo y facilita su desplazamiento. En busca
Medidas de la tensión de salida en variadores de velocidad con osciloscopios digitales ScopeMeter Serie 190 de Fluke
 Aplicación Medidas de la tensión de salida en variadores de velocidad con osciloscopios digitales ScopeMeter Serie 190 de Fluke Por Viditec La utilización de variadores de velocidad o "inversores de frecuencia"
Aplicación Medidas de la tensión de salida en variadores de velocidad con osciloscopios digitales ScopeMeter Serie 190 de Fluke Por Viditec La utilización de variadores de velocidad o "inversores de frecuencia"
La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales.
 La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales. La instalación de aerogeneradores en entornos urbanos requiere la implementación de importantes medidas
La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales. La instalación de aerogeneradores en entornos urbanos requiere la implementación de importantes medidas
1.2 SISTEMAS DE PRODUCCIÓN
 19 1.2 SISTEMAS DE PRODUCCIÓN Para operar en forma efectiva, una empresa manufacturera debe tener sistemas que le permitan lograr eficientemente el tipo de producción que realiza. Los sistemas de producción
19 1.2 SISTEMAS DE PRODUCCIÓN Para operar en forma efectiva, una empresa manufacturera debe tener sistemas que le permitan lograr eficientemente el tipo de producción que realiza. Los sistemas de producción
PROYECTO FISCA ELECTRICA GENERADOR DE ELECTRICIDAD ECOLÓGICO LORENA CARRANZA ILLO WILLIAM ANDRES RUIZ
 PROYECTO FISCA ELECTRICA GENERADOR DE ELECTRICIDAD ECOLÓGICO LORENA CARRANZA ILLO WILLIAM ANDRES RUIZ ESCUELA COLOMBIANA DE CARRERAS INDUSTRIALES TECNOLOGIA EN GESTION DE PROCESOS INDUSTRIALES FISCA ELECTRICA
PROYECTO FISCA ELECTRICA GENERADOR DE ELECTRICIDAD ECOLÓGICO LORENA CARRANZA ILLO WILLIAM ANDRES RUIZ ESCUELA COLOMBIANA DE CARRERAS INDUSTRIALES TECNOLOGIA EN GESTION DE PROCESOS INDUSTRIALES FISCA ELECTRICA
CONTROL DE MOTORES PASO A PASO MEDIANTE MICROCONTROLADORES. (Stepper motor)
") CONTROL DE MOTORES PASO A PASO MEDIANTE MICROCONTROLADORES (Stepper motor) 1 - Introducción a los MPAP 2 - Principio de funcionamiento 3 - Tipos de motores - Unipolares - Bipolares 4 - Secuencias para
CONTROL DE MOTORES PASO A PASO MEDIANTE MICROCONTROLADORES (Stepper motor) 1 - Introducción a los MPAP 2 - Principio de funcionamiento 3 - Tipos de motores - Unipolares - Bipolares 4 - Secuencias para
MEDICIÓN DE ENERGÍA ELÉCTRICA ACTIVA
 ELT 8.MEDICION DE ENERGIA ELECTRICA ACTIVA.- INTRODUCIÓN MEDICIÓN DE ENERGÍA ELÉCTRICA ACTIVA La medición de energía eléctrica activa se realiza con el medidor de KWH de tipo inducción y con el medidor
ELT 8.MEDICION DE ENERGIA ELECTRICA ACTIVA.- INTRODUCIÓN MEDICIÓN DE ENERGÍA ELÉCTRICA ACTIVA La medición de energía eléctrica activa se realiza con el medidor de KWH de tipo inducción y con el medidor
Si la intensidad de corriente y su dirección no cambian con el tiempo, entonces esa corriente se llama corriente continua.
 1.8. Corriente eléctrica. Ley de Ohm Clases de Electromagnetismo. Ariel Becerra Si un conductor aislado es introducido en un campo eléctrico entonces sobre las cargas libres q en el conductor va a actuar
1.8. Corriente eléctrica. Ley de Ohm Clases de Electromagnetismo. Ariel Becerra Si un conductor aislado es introducido en un campo eléctrico entonces sobre las cargas libres q en el conductor va a actuar
Escuela 4-016 Ing. Marcelo Antonio Arboit - Junín
 Un transformador se compone de dos arrollamientos aislados eléctricamente entre sí y devanados sobre un mismo núcleo de hierro. Una corriente alterna que circule por uno de los arrollamientos crea en el
Un transformador se compone de dos arrollamientos aislados eléctricamente entre sí y devanados sobre un mismo núcleo de hierro. Una corriente alterna que circule por uno de los arrollamientos crea en el
AUTOMATIZACION. Reconocer la arquitectura y características de un PLC Diferenciar los tipos de entradas y salidas
 AUTOMATIZACION GUIA DE TRABAJO 2 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Reconocer la arquitectura
AUTOMATIZACION GUIA DE TRABAJO 2 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Reconocer la arquitectura
Campo Magnético. Campo creado por espiras de corriente Campo Magnético Terrestre
 Campo Magnético Campo creado por espiras de corriente Campo Magnético Terrestre 1. OBJETVOS - Estudiar el campo magnético que crea una espira circular en función de la intensidad de corriente y del radio.
Campo Magnético Campo creado por espiras de corriente Campo Magnético Terrestre 1. OBJETVOS - Estudiar el campo magnético que crea una espira circular en función de la intensidad de corriente y del radio.
Curso de Iniciación a la Micro- Robótica. SigBot ACM Capítulo de estudiantes
 Curso de Iniciación a la Micro- Robótica SigBot ACM Capítulo de estudiantes Micro-robótica? La micro-robótica es la parte de la robótica que crea los robots más económicos y de fácil construcción para
Curso de Iniciación a la Micro- Robótica SigBot ACM Capítulo de estudiantes Micro-robótica? La micro-robótica es la parte de la robótica que crea los robots más económicos y de fácil construcción para
Clase XIII. Máquinas Especiales. Máquinas Especiales
 INSTITUTO TECNOLÓGICO DE COSTA RICA ESCUELA DE INGENIERÍA ELECTROMECÁNICA CURSO: MÁQUINAS ELÉCTRICAS PARA MECATRÓNICA PROFESOR: ING. GREIVIN BARAHONA GUZMÁN Clase XIII Máquinas Especiales Máquinas Especiales
INSTITUTO TECNOLÓGICO DE COSTA RICA ESCUELA DE INGENIERÍA ELECTROMECÁNICA CURSO: MÁQUINAS ELÉCTRICAS PARA MECATRÓNICA PROFESOR: ING. GREIVIN BARAHONA GUZMÁN Clase XIII Máquinas Especiales Máquinas Especiales
Como utilizar un servo motor con Arduino.
 Como utilizar un servo motor con Arduino. Revisión Diciembre 2009 Desarrollada por: Christopher Thompson cthompson@olimex.cl Revisada por: Paul Aguayo paguayo@olimex.cl 2 1 Introducción Arduino es una
Como utilizar un servo motor con Arduino. Revisión Diciembre 2009 Desarrollada por: Christopher Thompson cthompson@olimex.cl Revisada por: Paul Aguayo paguayo@olimex.cl 2 1 Introducción Arduino es una
MÁQUINAS ELÉCTRICAS LABORATORIO No. 4
 Nivel: Departamento: Facultad de Estudios Tecnológicos. Eléctrica. Materia: Maquinas Eléctricas I. Docente de Laboratorio: Lugar de Ejecución: Tiempo de Ejecución: G u í a d e L a b o r a t o r i o N o.
Nivel: Departamento: Facultad de Estudios Tecnológicos. Eléctrica. Materia: Maquinas Eléctricas I. Docente de Laboratorio: Lugar de Ejecución: Tiempo de Ejecución: G u í a d e L a b o r a t o r i o N o.
MAGNETISMO INDUCCIÓN ELECTROMAGNÉTICA FÍSICA II - 2011 GUÍA Nº4
 GUÍA Nº4 Problema Nº1: Un electrón entra con una rapidez v = 2.10 6 m/s en una zona de campo magnético uniforme de valor B = 15.10-4 T dirigido hacia afuera del papel, como se muestra en la figura: a)
GUÍA Nº4 Problema Nº1: Un electrón entra con una rapidez v = 2.10 6 m/s en una zona de campo magnético uniforme de valor B = 15.10-4 T dirigido hacia afuera del papel, como se muestra en la figura: a)
UD 4.-ELECTRICIDAD 1. EL CIRCUITO ELÉCTRICO
 DPTO. TECNOLOGÍA (ES SEFAAD) UD 4.-ELECTCDAD UD 4.- ELECTCDAD. EL CCUTO ELÉCTCO. ELEMENTOS DE UN CCUTO 3. MAGNTUDES ELÉCTCAS 4. LEY DE OHM 5. ASOCACÓN DE ELEMENTOS 6. TPOS DE COENTE 7. ENEGÍA ELÉCTCA.
DPTO. TECNOLOGÍA (ES SEFAAD) UD 4.-ELECTCDAD UD 4.- ELECTCDAD. EL CCUTO ELÉCTCO. ELEMENTOS DE UN CCUTO 3. MAGNTUDES ELÉCTCAS 4. LEY DE OHM 5. ASOCACÓN DE ELEMENTOS 6. TPOS DE COENTE 7. ENEGÍA ELÉCTCA.
Showroom Av. Juan B. Alberdi 4062 C1407GZU Buenos Aires Tel. 4674-2641 / 2643. www.lavandera.com.ar
 MANUAL DE MONTAJE PARA MECANISMO LEVADIZO PLC / V Showroom Av. Juan B. Alberdi 4062 C1407GZU Buenos Aires Tel. 4674-2641 / 2643 www.lavandera.com.ar 1 MANUAL DE MONTAJE PARA MECANISMO LEVADIZO PLC / V
MANUAL DE MONTAJE PARA MECANISMO LEVADIZO PLC / V Showroom Av. Juan B. Alberdi 4062 C1407GZU Buenos Aires Tel. 4674-2641 / 2643 www.lavandera.com.ar 1 MANUAL DE MONTAJE PARA MECANISMO LEVADIZO PLC / V
TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO
 TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO Introducción.- Asanza,V 1 ; Laica,J 1 ; Paillacho,D 1 1. Centro de Visión y Robotica {vasanza, jlaica, dpailla} @fiec.espol.edu.ec Un
TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO Introducción.- Asanza,V 1 ; Laica,J 1 ; Paillacho,D 1 1. Centro de Visión y Robotica {vasanza, jlaica, dpailla} @fiec.espol.edu.ec Un
Problemas resueltos. Consideramos despreciable la caída de tensión en las escobillas, por lo que podremos escribir:
 Problemas resueltos Problema 1. Un motor de c.c (excitado según el circuito del dibujo) tiene una tensión en bornes de 230 v., si la fuerza contraelectromotriz generada en el inducido es de 224 v. y absorbe
Problemas resueltos Problema 1. Un motor de c.c (excitado según el circuito del dibujo) tiene una tensión en bornes de 230 v., si la fuerza contraelectromotriz generada en el inducido es de 224 v. y absorbe
INFORMACIÓN TÉCNICA DE NUESTROS PRODUCTOS
 INDUKTOR X 500 Manual de instrucciones MEDICION DE LA INDUCTANCIA Presionar y soltar el pulsador verde (1), con lo cual el LED rojo se encenderá y podrá ajustar la corriente de medida con el dial (4).
INDUKTOR X 500 Manual de instrucciones MEDICION DE LA INDUCTANCIA Presionar y soltar el pulsador verde (1), con lo cual el LED rojo se encenderá y podrá ajustar la corriente de medida con el dial (4).
Efecto de los variadores de velocidad electrónicos sobre los motores eléctricos de corriente alterna.
 Efecto de los variadores de velocidad electrónicos sobre los motores eléctricos de corriente alterna. Por Oscar Nuñez Mata onunezm@hotmail.com Introducción El aumento del uso de dispositivos electrónicos
Efecto de los variadores de velocidad electrónicos sobre los motores eléctricos de corriente alterna. Por Oscar Nuñez Mata onunezm@hotmail.com Introducción El aumento del uso de dispositivos electrónicos
Sensores. Sensores internos Sensores de presencia Sensores de posición Sensores de velocidad Sensores de fuerza
 Sensores Sensores internos Sensores de presencia Sensores de posición Sensores de velocidad Sensores de fuerza Sensores externos Sensores de presencia Sensores de distancia Sensores para reconocimiento
Sensores Sensores internos Sensores de presencia Sensores de posición Sensores de velocidad Sensores de fuerza Sensores externos Sensores de presencia Sensores de distancia Sensores para reconocimiento
CAPÍTULO 7 7. CONCLUSIONES
 CAPÍTULO 7 7. CONCLUSIONES 7.1. INTRODUCCIÓN 7.2. CONCLUSIONES PARTICULARES 7.3. CONCLUSIONES GENERALES 7.4. APORTACIONES DEL TRABAJO DE TESIS 7.5. PROPUESTA DE TRABAJOS FUTUROS 197 CAPÍTULO 7 7. Conclusiones
CAPÍTULO 7 7. CONCLUSIONES 7.1. INTRODUCCIÓN 7.2. CONCLUSIONES PARTICULARES 7.3. CONCLUSIONES GENERALES 7.4. APORTACIONES DEL TRABAJO DE TESIS 7.5. PROPUESTA DE TRABAJOS FUTUROS 197 CAPÍTULO 7 7. Conclusiones
El grupo de trabajo IEEE 802.15 ha definido tres clases de WPANs que se
 2 Disposiciones generales. 2.1 Tipos de WPANs. El grupo de trabajo IEEE 802.15 ha definido tres clases de WPANs que se diferencian por su rango de datos, consumo de energía y calidad de servicio (QoS).
2 Disposiciones generales. 2.1 Tipos de WPANs. El grupo de trabajo IEEE 802.15 ha definido tres clases de WPANs que se diferencian por su rango de datos, consumo de energía y calidad de servicio (QoS).
MODULO Nº12 TRANSISTORES MOSFET
 MODULO Nº12 TRANSISTORES MOSFET UNIDAD: CONVERTIDORES CC - CC TEMAS: Transistores MOSFET. Parámetros del Transistor MOSFET. Conmutación de Transistores MOSFET. OBJETIVOS: Comprender el funcionamiento del
MODULO Nº12 TRANSISTORES MOSFET UNIDAD: CONVERTIDORES CC - CC TEMAS: Transistores MOSFET. Parámetros del Transistor MOSFET. Conmutación de Transistores MOSFET. OBJETIVOS: Comprender el funcionamiento del
Alumbrado Público con Tecnología LED
 Alumbrado Público con Tecnología LED Miguel Rojas colaboración sobre LEDs para alumbrado público. La iluminación con LEDs ha dado un giro sorprendente en los últimos dos años llegando a rincones que hace
Alumbrado Público con Tecnología LED Miguel Rojas colaboración sobre LEDs para alumbrado público. La iluminación con LEDs ha dado un giro sorprendente en los últimos dos años llegando a rincones que hace
Electrón: partícula más pequeña de un átomo, que no se encuentra en el núcleo y que posee carga eléctrica negativa.
 Electricidad: flujo o corriente de electrones. Electrón: partícula más pequeña de un átomo, que no se encuentra en el núcleo y que posee carga eléctrica negativa. Elementos básicos de un circuito: generador,
Electricidad: flujo o corriente de electrones. Electrón: partícula más pequeña de un átomo, que no se encuentra en el núcleo y que posee carga eléctrica negativa. Elementos básicos de un circuito: generador,
Motor Sincrónico. Dr. Ing. Mario Guillermo Macri
 Motor Sincrónico Circuito Equivalente y Diagrama Fasorial (Método de Z d) Ra xad wr Ia UA E0 E 0 U IsRs jis w1ld U Is Rs jxd Posición del eje magnético polar en vacío U Iaxad - Ia xl E0 If - SR Ia IaRa
Motor Sincrónico Circuito Equivalente y Diagrama Fasorial (Método de Z d) Ra xad wr Ia UA E0 E 0 U IsRs jis w1ld U Is Rs jxd Posición del eje magnético polar en vacío U Iaxad - Ia xl E0 If - SR Ia IaRa
Tema N 2.- Tiempo de respuesta de un PLC
 2.1. Factores que inciden en el tiempo de respuesta del PLC. Introducción Para desarrollar aplicaciones que permitan manejar y controlar procesos en las plantas, es importante que el controlador lógico
2.1. Factores que inciden en el tiempo de respuesta del PLC. Introducción Para desarrollar aplicaciones que permitan manejar y controlar procesos en las plantas, es importante que el controlador lógico
Componentes: RESISTENCIAS FIJAS
 ELECTRÓNICA ELECTRÓNICA Componentes: RESISTENCIAS FIJAS Componentes: RESISTENCIAS VARIABLES Componentes: RESISTENCIAS DEPENDIENTES Componentes: RESISTENCIAS DEPENDIENTES Componentes: CONDENSADORES Componentes:
ELECTRÓNICA ELECTRÓNICA Componentes: RESISTENCIAS FIJAS Componentes: RESISTENCIAS VARIABLES Componentes: RESISTENCIAS DEPENDIENTES Componentes: RESISTENCIAS DEPENDIENTES Componentes: CONDENSADORES Componentes:
ME II 03 TEORIA DE BOBINADOS TRIFASICOS
 TIPOS DE CONEXIONES EN MOTORES ASINCRONOS TRIFASICOS Existen dos tipos: Motor trifásico tipo jaula de ardilla. CONEXIONES INTERNAS Este tipo de conexiones se realizan cuando el motor se halla en el proceso
TIPOS DE CONEXIONES EN MOTORES ASINCRONOS TRIFASICOS Existen dos tipos: Motor trifásico tipo jaula de ardilla. CONEXIONES INTERNAS Este tipo de conexiones se realizan cuando el motor se halla en el proceso
podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que el
 CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
HIPÓTESIS DE DISEÑO DEL MOTOR ASÍNCRONO CONVENCIONAL
 Introducción a los motores asíncronos vectoriales Qué tipo de motor instala usted con su variador de frecuencia? Si formulamos esta pregunta a la mayoría de ingenieros, la respuesta en muchos casos será
Introducción a los motores asíncronos vectoriales Qué tipo de motor instala usted con su variador de frecuencia? Si formulamos esta pregunta a la mayoría de ingenieros, la respuesta en muchos casos será
Turbinas de vapor. Introducción
 Turbinas de vapor Introducción La turbina de vapor es una máquina de fluido en la que la energía de éste pasa al eje de la máquina saliendo el fluido de ésta con menor cantidad de energía. La energía mecánica
Turbinas de vapor Introducción La turbina de vapor es una máquina de fluido en la que la energía de éste pasa al eje de la máquina saliendo el fluido de ésta con menor cantidad de energía. La energía mecánica