Constraint Satisfaction is a simple but powerful idea
|
|
|
- Xavier Nieto Hernández
- hace 6 años
- Vistas:
Transcripción
1 1 Problemas de Satisfacción de Restricciones (CSP) Contenidos: Definición del problema de satisfacción de restricciones (CSP). Áreas de aplicación. Especificación de un problema CSP: variables, dominios y restricciones. Tipología de restricciones (discretas y continuas, fuertes y débiles, restricciones lineales, disyuntivas, etc.).
2 2 CSP Constraint Satisfaction is a simple but powerful idea Rina Dechter, In 'Constraint Processing' Morgan Kaufmann Pub. (2003)
+10(n+r)+d+e=10 4 m+10 3 o+10 2 n+y Coloreado de Mapas Variables: x,y,z,w x y Dominios: x,y,z,w :{r,v,a} Restricciones: binarias x y, y z, z w,.")
3 3 EJEMPLOS 1 Variables: s,e,n,d,m,o,r,y Dominios: s,e,n,d,m,o,r,y {0,,9} Restricciones s e n d + m o r e m o n e y Objetivos Consistencia Soluciones 10 3 (s+m)+10 2 (e+o)+10(n+r)+d+e=10 4 m+10 3 o+10 2 n+y Coloreado de Mapas Variables: x,y,z,w x y Dominios: x,y,z,w :{r,v,a} Restricciones: binarias x y, y z, z w,... w z El Problema de las 8 Reinas
4 4 EJEMPLOS 2 Juan, Pepe y Paco nacieron y viven en ciudades diferentes (Málaga, Madrid y Valencia). Además, ninguno vive en la ciudad donde nació. Juan es más alto que el que vive en Madrid. Paco es cuñado del que vive en Valencia. El que vive en Madrid y el que nació en Málaga tienen nombres que comienzan por distinta letra. El que nació en Málaga y el que vive ahora en Valencia tienen nombres que comienzan por la misma letra. Donde nació y vive cada uno?
5 5 EJEMPLOS 3 "Juan va de su casa al trabajo en coche (30-40 minutos) o en tren (al menos una hora). Luis va en coche (20-30 minutos) o en metro (40-50 minutos). Hoy Juan parte de casa entre las 8:10 y las 8:20 y Luis llega al trabajo entre las 9:00 y las 9:10. Además, sabemos que Juan llegó al trabajo entre 10 y 20 minutos después de que Luis saliera de casa Cuestiones: Esta información es consistente? Es posible que Juan haya usado el tren y Luis haya usado el Metro? Cuales son los posibles tiempos en los que Luis pudo haber salido de casa?, etc.
6 6 EJEMPLOS 4 Variables: altura de viga, longitud de viga, canto de forjado Dominios continuos: altura, longitud : [0, 10] Restricciones: vibraciones, refuerzos, conexiones, etc. Objetivos Consistencia Intervalos de tolerancia Soluciones etc
7 7 CSP Problemas de Satisfacción de Restricciones CSP Metodología de Resolución de problemas INTELIGENCIA ARTIFICIAL
8 8 Definición de CSP Un Problema de Satisfacción de Restricciones (CSP) se puede representar como: Un Conjunto de Variables: X={x 1, x 2,..., x n } Dominios de Interpretación (D = <D 1,,D n > ) para las variables: x i D i Un Conjunto de Restricciones entre las variables: C ={c 1, c 2,..., c m }
9 9 Modelización CSP 1) MODELACIÓN CSP Variables Dominios Restricciones (EXPRESIVIDAD) 2) RESOLUCIÓN CSP Técnicas Resolución CSP (EFICICIENCIA)
10 10 Modelización 1 Variables: s,e,n,d,m,o,r,y Dominios: s,e,n,d,m,o,r,y:{0,,9} Restricciones s e n d + m o r e m o n e y Especificación CSP Variables: s, e, n, d, m, o, r, y Dominios: s, e, n, d, m, o, r,y : {0,,9} Restricciones: Todas Diferentes, 10 3 (s+m) (e+o) + 10(n+r) + d + e= 10 4 m o n + 10e+y
11 11 Modelización 2 Variables: s, e, n, d, m, o, r, y Dominios: s, e, n, d, m, o, r,y : {0,,9} Restricciones: s e n d + m o r e m o n e y s e, s n, s d, s m, s o, s r, s y, e n, e d, e m,.. d+e = y+10c1 c 1 +n+r = e+10c 2 c 2 +e+o = n+10c 3 c 3 +s+m = 10m+o
12 12 Resolución MODELACIÓN CSP RESOLUCIÓN CSP s e n d + m o r e m o n e y
13 13 Objetivos Consistencia del problema (existe solución). Obtener una o todas las soluciones del problema. Obtener los dominios mínimos. La solución que optimiza una función objetivo o multi-objetivo.
14 14 Objetivos Objetivo de un CSP: Tiene solución? Consistencia. Obtener una solución. Obtener todas las soluciones. Obtener una solución óptima, o al menos una buena solución, medida por alguna función objetivo (función de evaluación). Algoritmos para CSP: Técnicas de Búsqueda (Algoritmos CSP): Obtienen una solución, guiados por heurísticas. Técnicas Inferenciales (Algoritmos de propagación): Obtienen las consecuencias de las restricciones explícitamente conocidas del problema.
15 15 Conceptos básicos Dado un CSP (X, D i, C), Una instanciación (o asignación) de las variables X es una asignación de valores a las variables en sus dominios: x 1 =v 1, x 2 =v 2,..., x n =v n / v i D Una solución del CSP es una instanciación consistente de las variables, de forma que se satisfacen todas las restricciones del problema. Un valor v es un valor consistente (o posible) para x i si existe una solución del CSP en la cual participa la asignación x i =v. Un CSP es consistente sii tiene al menos una solución.
16 16 Conceptos básicos Variables Un CSP discreto es aquel en el que todas las variables son discretas, es decir, toman valores en dominios discretos. Un CSP continuo es un CSP en el que todas las variables son continuas, es decir, tienen dominios continuos. Un CSP mixto consta de variables continuas y discretas. Un CSP binario es aquel en el que todas las restricciones tienen a los sumo dos variables respectivamente. Un CSP no binario o n-ario es aquel en el que las restricciones tienen más de dos variables.
17 17 Conceptos básicos Restricciones Discretas: las variables participantes están acotadas en dominios discretos. Continuas: las variables participantes están acotadas en dominios continuos. Binarias: son restricciones en las que sólo participan dos variables. N-arias: son restricciones en las que participan N variables (N>2). Fuertes (hard): son restricciones cuya satisfabilidad es imprescindible. Débiles (soft): son restricciones cuya satisfabilidad no es imprescindible. Difusas (fuzzy): son restricciones definidas sobre niveles de preferencia. Disyuntivas: son restricciones compuestas por un conjunto disjunto de restricciones.
18 18 N-reinas Definición: posicionar n reinas en un tablero de ajedrez n x n, de forma que no se ataquen. Formulación: 1 reina por fila variables: reinas, X i reina en la fila i-ésima dominios: columnas posibles {1, 2,..., n} restricciones: no colocar dos reinas en la misma columna la misma diagonal Características: CSP binario, discreto y finito

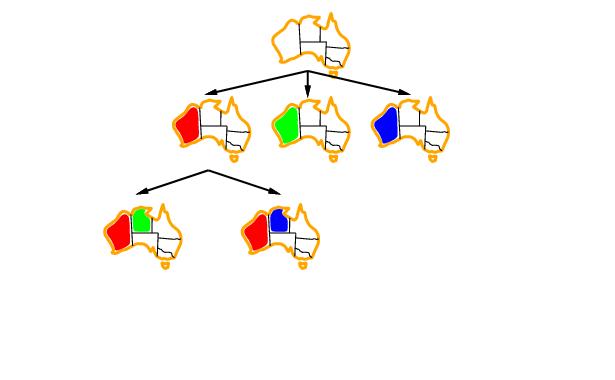
19 19 Coloreado de Grafos Definición: Dado un grafo, n nodos m colores, asignar un color a cada nodo de forma que no haya dos nodos adyacentes con el mismo color. Formulación: variables: nodos dominios: colores posibles restricciones: nodos adyacentes Características: CSP binario, discreto y finito
 dominios: palabras del diccionario con la longitud adecuada restricciones: misma letra en la intersección de")
20 20 Crucigrama Definición: Dada una rejilla y un diccionario, construir un crucigrama compatible. Formulación: variables: grupo de casillas para una palabra (slots) dominios: palabras del diccionario con la longitud adecuada restricciones: misma letra en la intersección de dos palabras Características: CSP binario, discreto y finito (dominios grandes)
21 21 Restricciones Temporales Definición: dado un conjunto de sucesos que ocurren en intervalos temporales con ciertas relaciones, encontrar una asignación temporal consistente. "Juan "Juan va va de de su su casa casa al al trabajo trabajo en en coche coche (30-40 (30-40 minutos) minutos) o o en en tren tren (al (al menos menos una una hora). hora). Luis Luis va va en en coche coche (20-30 (20-30 minutos) minutos) o o en en metro metro (40-50 (40-50 minutos). minutos). Hoy Hoy Juan Juan parte parte de de casa casa entre entre las las 8:10 8:10 y y las las 8:20 8:20 y y Luis Luis llega llega al al trabajo trabajo entre entre las las 9:00 9:00 y y las las 9:10. 9:10. Además, Además, sabemos sabemos que que Juan Juan llegó llegó al al trabajo trabajo entre entre y y minutos minutos después después de de que que Luis Luis saliera saliera de de casa" casa" Formulación: variables: sucesos dominios: intervalo temporal para cada suceso restricciones: distancia temporal permitida entre sucesos; relaciones temporales antes, después, solapado, etc. Características: CSP binario, continuo, con restricciones disyuntivas {[10, 20]} T0 T1 {[30, 40], [60, ]} {[60, 70]} {[10, 20]} T3 T2 {[20, 30], [40, 50]} T0: Tiempo inicial (en este caso, 8:00 h.) T1 / T2: Tiempo en que Juan sale de casa / llega al trabajo. T3/T4: Tiempo en que Luis sale de casa / llega al trabajo. T4
22 22 Problema de diseño Definición: el problema consiste en llevar a cabo el diseño de un puente que debe constar de pocos arcos siendo preferible que los pilares no toquen el agua y los pilares sean lo más bajos posibles. Formulación: variables: partes y elementos del diseño dominios: valores permitidos para cada parte y elemento restricciones: propiedades que las partes deben satisfacer. Características: CSP no binario, mixto, con restricciones hard, soft y difusas. a) Solución por defecto para los arcos dados: b) Versión teniendo en cuenta aspectos estéticos y geotecnológicos: c) Bases para diseñar los detalles de los pilares: d1) Pilares demasiado cerca e) Diseño final:?? d2) Pilares sobre el peralte Backtracking sobre los detalles de diseño de los pilares d3) Pilares en el agua
23 23 CSPs binarios & n-arios Binario Un CSP binario se suele representar mediante un grafo, donde: Nodos: Variables Arcos: Relaciones binarias entre las variables. X2 X4 X1 R12 x2 x3 R35 x5 x1 R15 x5 x4 R42 x2 x4 R45 x5 x2 R25 x5 X1 X3 X5
24 24 CSPs binarios & n-arios No Binario Un CSP no binario no se suele representar mediante un grafo, sino como un hiper-grafo perdiendo toda la funcionalidad existente sobre la teoría de grafos. donde: Nodos: Variables Arcos: Relaciones binarias entre las variables. C123 X1 X2 X3 C24567 X4 X5 X6 X7
25 25 Consistencia: Niveles 1-consistencia Consistencia de nodo (1-consistencia) Un nodo (x i ) es consistente si al menos un valor en su dominio es consistente con la restricción unaria del nodo: 10 xi 15, D(Xi):{0, 10} Un grafo red es nodo-consistente sii todos sus nodos son consistentes: x i CSP, v i D/ (x i c i0 ) se cumple para x i =v i (ie: D c i0 { })
26 26 Consistencia: Niveles 2-consistencia Consistencia de arco (2-consistencia) consistencia): Un arco (xi {cij} xj) es consistente si y solo si para cada asignación de xi en su dominio, existe una asignación para xi, tal que la restricción {cij} se satisface. Por ejemplo el arco: xi Cij xj [3,6] [8,10] es consistente, pero no lo sería si c ij en vez de fuese Un grafo es arco-consistente si todos sus arcos son consistentes. c ij CSP, v i d i v j d j / (x i c ij x j ) se cumple para x i =v i, x j =v j
27 27 Backtracking: ejemplo
28 28 Backtracking: ejemplo
29 29 Backtracking: ejemplo
30 30 Backtracking: ejemplo
Restricciones. Inteligencia Artificial. Ingeniería Superior en Informática, 4º Curso académico: 2011/2012 Profesores: Ramón Hermoso y Matteo Vasirani
 Restricciones Ingeniería Superior en Informática, 4º Curso académico: 2011/2012 Profesores: Ramón Hermoso y Matteo Vasirani 1 Tema 2: Agentes basados en Búsqueda Resumen: 2. Agentes basados en búsqueda
Restricciones Ingeniería Superior en Informática, 4º Curso académico: 2011/2012 Profesores: Ramón Hermoso y Matteo Vasirani 1 Tema 2: Agentes basados en Búsqueda Resumen: 2. Agentes basados en búsqueda
Inteligencia Artificial Problemas de satisfacción de restricciones
 Inteligencia Artificial Problemas de satisfacción de restricciones Primavera 2007 profesor: Luigi Ceccaroni Problemas de satisfacción de restricciones (PSRs) Componentes del estado = grafo de restricciones:
Inteligencia Artificial Problemas de satisfacción de restricciones Primavera 2007 profesor: Luigi Ceccaroni Problemas de satisfacción de restricciones (PSRs) Componentes del estado = grafo de restricciones:
Problemas de satisfacción de restricciones.
 Problemas de satisfacción de restricciones. In whitch we see how treating states as more than just little black boxes leads to the invention of a range of powerful new search methods and a deeper understanding
Problemas de satisfacción de restricciones. In whitch we see how treating states as more than just little black boxes leads to the invention of a range of powerful new search methods and a deeper understanding
(b) Cuál es la desventaja principal de una heurística con aprendizaje? es más informada que otra función heurística optimista h 2 *?
 Cuál es la desventaja principal de una heurística con aprendizaje? es más informada que otra función heurística optimista h 2 *?") UNIVERIDD REY JUN CRLO CURO 0-0 INTELIGENCI RTIFICIL Hoja de Problemas Tema Ejercicio : Conteste a las siguientes preguntas: (a) Cómo funciona una heurística con aprendizaje? olución: Una heurística con
UNIVERIDD REY JUN CRLO CURO 0-0 INTELIGENCI RTIFICIL Hoja de Problemas Tema Ejercicio : Conteste a las siguientes preguntas: (a) Cómo funciona una heurística con aprendizaje? olución: Una heurística con
Teoría de grafos y optimización en redes
 Teoría de grafos y optimización en redes José María Ferrer Caja Universidad Pontificia Comillas Definiciones básicas Grafo: Conjunto de nodos (o vértices) unidos por aristas G = (V,E) Ejemplo V = {,,,,
Teoría de grafos y optimización en redes José María Ferrer Caja Universidad Pontificia Comillas Definiciones básicas Grafo: Conjunto de nodos (o vértices) unidos por aristas G = (V,E) Ejemplo V = {,,,,
Inteligencia Artificial II Unidad Plan 2010-Ingeniería en Sistemas Computacionales
 Inteligencia Artificial II Unidad Plan 2010-Ingeniería en Sistemas Computacionales Rafael Vázquez Pérez Unidad II:Técnicas de Búsqueda. 2.1. Solución de problemas con búsqueda. 2.2. Espacios de estados.
Inteligencia Artificial II Unidad Plan 2010-Ingeniería en Sistemas Computacionales Rafael Vázquez Pérez Unidad II:Técnicas de Búsqueda. 2.1. Solución de problemas con búsqueda. 2.2. Espacios de estados.
Programación por restricciones clase 14
 Programación por restricciones clase 14 Camilo Rueda Universidad Javeriana-Cali Programación por restriccionesclase 14-- p.1/19 Modelamiento en CCP Dos tipos de restricciones: Solubles Solucionables eficientemente
Programación por restricciones clase 14 Camilo Rueda Universidad Javeriana-Cali Programación por restriccionesclase 14-- p.1/19 Modelamiento en CCP Dos tipos de restricciones: Solubles Solucionables eficientemente
Satisfacción de Restricciones
 Satisfacción de Restricciones Introducción Componentes del estado: Variables Dominios (valores posibles para las variables) Restricciones binarias entre las variables Objetivo: Encontrar un estado que
Satisfacción de Restricciones Introducción Componentes del estado: Variables Dominios (valores posibles para las variables) Restricciones binarias entre las variables Objetivo: Encontrar un estado que
Formulación del problema de la ruta más corta en programación lineal
 Formulación del problema de la ruta más corta en programación lineal En esta sección se describen dos formulaciones de programación lineal para el problema de la ruta más corta. Las formulaciones son generales,
Formulación del problema de la ruta más corta en programación lineal En esta sección se describen dos formulaciones de programación lineal para el problema de la ruta más corta. Las formulaciones son generales,
Problema de las N Reinas. Resolución paralela
 Problema de las N Reinas Resolución paralela Indice Introducción al problema Representación y Soluciones Resolución secuencial Resolución paralela Conclusiones Bibliografía 2 3 Introducción Introducción
Problema de las N Reinas Resolución paralela Indice Introducción al problema Representación y Soluciones Resolución secuencial Resolución paralela Conclusiones Bibliografía 2 3 Introducción Introducción
Tema 5: Problemas de satisfacción de restricciones
 Tema 5: Problemas de satisfacción de restricciones José Luis uiz eina José Antonio Alonso Franciso J. Martín Mateos María José Hidalgo Departamento de Ciencias de la Computación e Inteligencia Artificial
Tema 5: Problemas de satisfacción de restricciones José Luis uiz eina José Antonio Alonso Franciso J. Martín Mateos María José Hidalgo Departamento de Ciencias de la Computación e Inteligencia Artificial
Problemas de Satisfacción de Restricciones
 Problemas de Satisfacción de estricciones José Luis uiz eina José Antonio Alonso Jiménez Franciso J. Martín Mateos María José Hidalgo Doblado Dpto. Ciencias de la Computación e Inteligencia Artificial
Problemas de Satisfacción de estricciones José Luis uiz eina José Antonio Alonso Jiménez Franciso J. Martín Mateos María José Hidalgo Doblado Dpto. Ciencias de la Computación e Inteligencia Artificial
Formulando con modelos lineales enteros
 Universidad de Chile 19 de marzo de 2012 Contenidos 1 Forma de un problema Lineal Entero 2 Modelando con variables binarias 3 Tipos de Problemas Forma General de un MILP Problema de optimización lineal
Universidad de Chile 19 de marzo de 2012 Contenidos 1 Forma de un problema Lineal Entero 2 Modelando con variables binarias 3 Tipos de Problemas Forma General de un MILP Problema de optimización lineal
Problemas de satisfacción de restricciones (CSP)
") Capítulo 10 Problemas de satisfacción de restricciones (CSP) 10.1 Introducción La programación por restricciones es una metodología software utilizada para la descripción y posterior resolución efectiva
Capítulo 10 Problemas de satisfacción de restricciones (CSP) 10.1 Introducción La programación por restricciones es una metodología software utilizada para la descripción y posterior resolución efectiva
El problema del agente viajero
 CO- (F0) //00 El problema del agente viajero Un vendedor tiene que visitar n + ciudades, cada una exactamente una vez. La distancia entre cada par de ciudades viene dada por d ij (en general d ij d ji
CO- (F0) //00 El problema del agente viajero Un vendedor tiene que visitar n + ciudades, cada una exactamente una vez. La distancia entre cada par de ciudades viene dada por d ij (en general d ij d ji
Razonamiento. con. Restricciones. Esquema Global. Tutorial IBERAMIA 2002. 1. Introducción - Definiciones - Ejemplos
 Esquema Global Razonamiento con Restricciones Tutorial IBERAMIA 2002 Javier Larrosa Dep. LSI, UPC, Barcelona Pedro Meseguer IIIA, CSIC, Bellaterra 1. Introducción - Definiciones - Ejemplos 2. Métodos de
Esquema Global Razonamiento con Restricciones Tutorial IBERAMIA 2002 Javier Larrosa Dep. LSI, UPC, Barcelona Pedro Meseguer IIIA, CSIC, Bellaterra 1. Introducción - Definiciones - Ejemplos 2. Métodos de
TRANSPORTE Y TRANSBORDO
 TRANSPORTE Y TRANSBORDO En ésta semana estudiaremos un modelo particular de problema de programación lineal, uno en el cual su resolución a través del método simplex es dispendioso, pero que debido a sus
TRANSPORTE Y TRANSBORDO En ésta semana estudiaremos un modelo particular de problema de programación lineal, uno en el cual su resolución a través del método simplex es dispendioso, pero que debido a sus
INVESTIGACION DE OPERACIONES:
 METODO SIMPLEX El algoritmo símplex fue descubierto por el matemático norteamericano George Bernard Dantzig en 1947, es una técnica para dar soluciones numéricas a problema de programación lineal Un problema
METODO SIMPLEX El algoritmo símplex fue descubierto por el matemático norteamericano George Bernard Dantzig en 1947, es una técnica para dar soluciones numéricas a problema de programación lineal Un problema
Razonamiento. con. Restricciones. Esquema Global. Tutorial CAEPIA 2003. 1. Introducción - Definiciones - Ejemplos
 Esquema Global Razonamiento con Restricciones Tutorial CAEPIA 2003 Javier Larrosa Dep. LSI, UPC, Barcelona Pedro Meseguer IIIA, CSIC, Bellaterra 1. Introducción - Definiciones - Ejemplos 2. Métodos de
Esquema Global Razonamiento con Restricciones Tutorial CAEPIA 2003 Javier Larrosa Dep. LSI, UPC, Barcelona Pedro Meseguer IIIA, CSIC, Bellaterra 1. Introducción - Definiciones - Ejemplos 2. Métodos de
Algebra Matricial y Teoría de Grafos
 Algebra Matricial y Teoría de Grafos Unidad 3: Nociones de teoría de grafos Luis M. Torres Escuela Politécnica del Litoral Quito, Enero 2008 Maestría en Control de Operaciones y Gestión Logística p.1 Contenido
Algebra Matricial y Teoría de Grafos Unidad 3: Nociones de teoría de grafos Luis M. Torres Escuela Politécnica del Litoral Quito, Enero 2008 Maestría en Control de Operaciones y Gestión Logística p.1 Contenido
Sesión 4: Teoría de Grafos
 Modelos Gráficos Probabilistas L. Enrique Sucar INAOE Sesión 4: Teoría de Grafos Problema de los puentes de Königsberg [Euler] Teoría de Grafos Definición y terminología Tipos de grafos Trayectorias y
Modelos Gráficos Probabilistas L. Enrique Sucar INAOE Sesión 4: Teoría de Grafos Problema de los puentes de Königsberg [Euler] Teoría de Grafos Definición y terminología Tipos de grafos Trayectorias y
Inteligencia Artificial. Revista Iberoamericana de Inteligencia Artificial ISSN: 1137-3601 revista@aepia.org
 Inteligencia Artificial. Revista Iberoamericana de Inteligencia Artificial ISSN: 1137-3601 revista@aepia.org Asociación Española para la Inteligencia Artificial España Barber, Federico; Salido, Miguel
Inteligencia Artificial. Revista Iberoamericana de Inteligencia Artificial ISSN: 1137-3601 revista@aepia.org Asociación Española para la Inteligencia Artificial España Barber, Federico; Salido, Miguel
Hoja de Problemas Tema 6 Búsqueda con estados estructurados: Restricciones
 Ejercicio 1: 1.1. Si se resuelve un problema de satisfacción de restricciones mediante búsqueda con asignaciones parciales, entonces (a) (b) (c) (d) (e) Un estado siempre asigna un valor a todas las variables
Ejercicio 1: 1.1. Si se resuelve un problema de satisfacción de restricciones mediante búsqueda con asignaciones parciales, entonces (a) (b) (c) (d) (e) Un estado siempre asigna un valor a todas las variables
Algoritmos para CSP 1
 Algoritmos para CSP 1 1. Técnicas de Consistencia, o Inferenciales I. Inferencia, o consistencia completa Proceso que permite la síntesis de todas las restricciones de un problema en una única restricción
Algoritmos para CSP 1 1. Técnicas de Consistencia, o Inferenciales I. Inferencia, o consistencia completa Proceso que permite la síntesis de todas las restricciones de un problema en una única restricción
Algoritmos de Planos de Corte
 Algoritmos de Planos de Corte Problema: max {cx / x X} con X = {x / Ax b, x Z n + } Proposición: conv (X) es un poliedro que puede entonces escribirse como conv (X) = {x / Ax b, x 0} Lo mismo ocurre para
Algoritmos de Planos de Corte Problema: max {cx / x X} con X = {x / Ax b, x Z n + } Proposición: conv (X) es un poliedro que puede entonces escribirse como conv (X) = {x / Ax b, x 0} Lo mismo ocurre para
Este material es de uso exclusivo para clase de algoritmos y estructura de datos, la información de este documento fue tomada textualmente de varios
 CLASE GRAFOS Este material es de uso exclusivo para clase de algoritmos y estructura de datos, la información de este documento fue tomada textualmente de varios libros por lo que está prohibida su impresión
CLASE GRAFOS Este material es de uso exclusivo para clase de algoritmos y estructura de datos, la información de este documento fue tomada textualmente de varios libros por lo que está prohibida su impresión
Análisis de Sensibilidad de los Resultados
 Pontificia Universidad Católica Escuela de Ingeniería Departamento de Ingeniería Industrial y de Sistemas Clase 22 Análisis de Sensibilidad de los Resultados ICS 02 Optimización Profesor : Claudio Seebach
Pontificia Universidad Católica Escuela de Ingeniería Departamento de Ingeniería Industrial y de Sistemas Clase 22 Análisis de Sensibilidad de los Resultados ICS 02 Optimización Profesor : Claudio Seebach
Técnicas de resolución de problemas de satisfacción de restricciones
 Técnicas de resolución de problemas de satisfacción de restricciones Felip Manyà * Dpto. de Informática e Ing. Industrial Universitat de Lleida Jaume II, 69, E-2500 Lleida, España felip@eup.udl.es Carla
Técnicas de resolución de problemas de satisfacción de restricciones Felip Manyà * Dpto. de Informática e Ing. Industrial Universitat de Lleida Jaume II, 69, E-2500 Lleida, España felip@eup.udl.es Carla
7. PROGRAMACION LINEAL
 7. PROGRAMACION LINEAL 7.1. INTRODUCCION A LA PROGRMACION LINEAL 7.2. FORMULACION DE UN PROBLEMA LINEAL 7.3. SOLUCION GRAFICA DE UN PROBLEMA LINEAL 7.4. CASOS ESPECIALES DE PROBLEMAS LINEALES 7.4.1. Problemas
7. PROGRAMACION LINEAL 7.1. INTRODUCCION A LA PROGRMACION LINEAL 7.2. FORMULACION DE UN PROBLEMA LINEAL 7.3. SOLUCION GRAFICA DE UN PROBLEMA LINEAL 7.4. CASOS ESPECIALES DE PROBLEMAS LINEALES 7.4.1. Problemas
Introducción a las RdP. Optimización basada en redes de Petri. Redes de Petri. Son objeto de estudio: RdP. Ejemplos:
 Seminario sobre toma de decisiones en logística y cadenas de suministro Introducción a las RdP Optimización basada en redes de Petri https://belenus.unirioja.es/~emjimene/optimizacion/transparencias.pdf
Seminario sobre toma de decisiones en logística y cadenas de suministro Introducción a las RdP Optimización basada en redes de Petri https://belenus.unirioja.es/~emjimene/optimizacion/transparencias.pdf
Hoja de Ejercicios. Temas 1 y 2
 Hoja de Ejercicios Temas 1 y 2 Ejercicio 1: Complete las siguientes frases con las alternativas especificadas. Si existen varias alternativas verdaderas, márquelas todas. 1.1. Cuál(es) de las siguientes
Hoja de Ejercicios Temas 1 y 2 Ejercicio 1: Complete las siguientes frases con las alternativas especificadas. Si existen varias alternativas verdaderas, márquelas todas. 1.1. Cuál(es) de las siguientes
Tema 7: Problemas clásicos de Programación Lineal
 Tema 7: Problemas clásicos de Programación Lineal 1.- Características generales de un problema de transporte y asignación Surgen con frecuencia en diferentes contextos de la vida real. Requieren un número
Tema 7: Problemas clásicos de Programación Lineal 1.- Características generales de un problema de transporte y asignación Surgen con frecuencia en diferentes contextos de la vida real. Requieren un número
Estado 3.2 (coste = 9)
") Búsqueda heurística Fernando Berzal, berzal@acm.org Búsqueda heurística Búsqueda primero el mejor p.ej. búsqueda de coste uniforme [UCS] Heurísticas Búsqueda greedy El algoritmo A* Heurísticas admisibles
Búsqueda heurística Fernando Berzal, berzal@acm.org Búsqueda heurística Búsqueda primero el mejor p.ej. búsqueda de coste uniforme [UCS] Heurísticas Búsqueda greedy El algoritmo A* Heurísticas admisibles
Problemas de Transbordo
 Universidad Nacional de Ingeniería UNI-Norte Problemas de Transbordo III Unidad Temática MSc. Ing. Julio Rito Vargas II semestre 2008 El problema de transbordo Un problema de transporte permite sólo envíos
Universidad Nacional de Ingeniería UNI-Norte Problemas de Transbordo III Unidad Temática MSc. Ing. Julio Rito Vargas II semestre 2008 El problema de transbordo Un problema de transporte permite sólo envíos
Grafos Los siete puentes de Königsberg: Teoría de Grafos
 Grafos Los siete puentes de Königsberg: Un ciudadano de Königsberg (Prusia) se propuso dar un paseo cruzando cada uno de los siete puentes que existen sobre el río Pregel una sola vez. Los dos brazos del
Grafos Los siete puentes de Königsberg: Un ciudadano de Königsberg (Prusia) se propuso dar un paseo cruzando cada uno de los siete puentes que existen sobre el río Pregel una sola vez. Los dos brazos del
Programación declarativa avanzada
 Programación declarativa avanzada Jaime Sánchez Hernández Universidad Complutense de Madrid Departamento de Sistemas Informáticos y Programación Curso 2014-2015 February 23, 2015 1 / 20 Horarios, tutorías
Programación declarativa avanzada Jaime Sánchez Hernández Universidad Complutense de Madrid Departamento de Sistemas Informáticos y Programación Curso 2014-2015 February 23, 2015 1 / 20 Horarios, tutorías
A5 Introducción a la optimización en redes
 48 Materials David Pujolar Morales A5 Introducción a la optimización en redes Definición 1. Grafo finito. Sea un V un conjunto no vacío con un número finito de elementos y E una familia finita de pares
48 Materials David Pujolar Morales A5 Introducción a la optimización en redes Definición 1. Grafo finito. Sea un V un conjunto no vacío con un número finito de elementos y E una familia finita de pares
Representación basada en Restricciones
 Representación basada en Restricciones Asunción Gómez-Pérez asun@fi.upm.es Departamento de Inteligencia Artificial Facultad de Informática Universidad Politécnica de Madrid Campus de Montegancedo sn, 28660
Representación basada en Restricciones Asunción Gómez-Pérez asun@fi.upm.es Departamento de Inteligencia Artificial Facultad de Informática Universidad Politécnica de Madrid Campus de Montegancedo sn, 28660
Tema 3: El Método Simplex. Algoritmo de las Dos Fases.
 Tema 3: El Método Simplex Algoritmo de las Dos Fases 31 Motivación Gráfica del método Simplex 32 El método Simplex 33 El método Simplex en Formato Tabla 34 Casos especiales en la aplicación del algoritmo
Tema 3: El Método Simplex Algoritmo de las Dos Fases 31 Motivación Gráfica del método Simplex 32 El método Simplex 33 El método Simplex en Formato Tabla 34 Casos especiales en la aplicación del algoritmo
INVESTIGACIÓN OPERATIVA
 FACULTAD DE INGENIERÍA Y ARQUITECTURA ESCUELA PROFESIONAL DE INGENIERÍA DE SISTEMAS INVESTIGACIÓN OPERATIVA Mg Jessica Pérez Rivera PROBLEMAS DE TRANSPORTE Y ASIGNACIÓN Las aplicaciones de la programación
FACULTAD DE INGENIERÍA Y ARQUITECTURA ESCUELA PROFESIONAL DE INGENIERÍA DE SISTEMAS INVESTIGACIÓN OPERATIVA Mg Jessica Pérez Rivera PROBLEMAS DE TRANSPORTE Y ASIGNACIÓN Las aplicaciones de la programación
UNIVERSIDAD NACIONAL DE INGENIERÍA UNI-RUACS. Investigación de Operaciones
 UNIVERSIDAD NACIONAL DE INGENIERÍA UNI-RUACS Facultad de Ingeniería Industrial Investigación de Operaciones Tema: Teoría de los Grafos Elaborado por: Ing. Carlos Alberto Moreno. Docente: Ing. Pastrana
UNIVERSIDAD NACIONAL DE INGENIERÍA UNI-RUACS Facultad de Ingeniería Industrial Investigación de Operaciones Tema: Teoría de los Grafos Elaborado por: Ing. Carlos Alberto Moreno. Docente: Ing. Pastrana
Relaciones. Estructuras Discretas. Relaciones. Relaciones en un Conjunto. Propiedades de Relaciones en A Reflexividad
 Estructuras Discretas Relaciones Definición: relación Relaciones Claudio Lobos, Jocelyn Simmonds clobos,jsimmond@inf.utfsm.cl Universidad Técnica Federico Santa María Estructuras Discretas INF 152 Sean
Estructuras Discretas Relaciones Definición: relación Relaciones Claudio Lobos, Jocelyn Simmonds clobos,jsimmond@inf.utfsm.cl Universidad Técnica Federico Santa María Estructuras Discretas INF 152 Sean
1. Diseñe algoritmos que permitan resolver eficientemente el problema de la mochila 0/1 para los siguientes casos:
 PROGRAMACIÓN DINÁMICA RELACIÓN DE EJERCICIOS Y PROBLEMAS 1. Diseñe algoritmos que permitan resolver eficientemente el problema de la mochila /1 para los siguientes casos: a. Mochila de capacidad W=15:
PROGRAMACIÓN DINÁMICA RELACIÓN DE EJERCICIOS Y PROBLEMAS 1. Diseñe algoritmos que permitan resolver eficientemente el problema de la mochila /1 para los siguientes casos: a. Mochila de capacidad W=15:
Programación con Restricciones Constraint Programming
 Programación con Restricciones Constraint Programming Introducción basada en Roman Barták: Guide to Constraint Programming http://kti.ms.mff.cuni.cz/~bartak/constraints/index.html Constraint Programming
Programación con Restricciones Constraint Programming Introducción basada en Roman Barták: Guide to Constraint Programming http://kti.ms.mff.cuni.cz/~bartak/constraints/index.html Constraint Programming
Centro Asociado Palma de Mallorca. Tutor: Antonio Rivero Cuesta
 Centro Asociado Palma de Mallorca Lógica y Estructuras Discretas Tutor: Antonio Rivero Cuesta Tema 5 Teoría de Grafos Conceptos Básicos Un grafo consta de: Grafo Un conjunto de nodos, Un conjunto de aristas
Centro Asociado Palma de Mallorca Lógica y Estructuras Discretas Tutor: Antonio Rivero Cuesta Tema 5 Teoría de Grafos Conceptos Básicos Un grafo consta de: Grafo Un conjunto de nodos, Un conjunto de aristas
Un sistema de ecuaciones diferenciales son aquellas que tienen varias posibilidades para su solución. Estas son:
 Unidad X: Programación lineal (continuación) Objetivo específico: Entender ampliamente el fenómeno del comportamiento de los modelos matemáticos para la resolución de problemas enfocados a las ecuaciones
Unidad X: Programación lineal (continuación) Objetivo específico: Entender ampliamente el fenómeno del comportamiento de los modelos matemáticos para la resolución de problemas enfocados a las ecuaciones
DEPARTAMENTO DE INGENIERÍA EN SISTEMAS Y COMPUTACIÓN OPCIÓN I
 1INSTITUTO TECNOLÓGICO DE CIUDAD MADERO DEPARTAMENTO DE INGENIERÍA EN SISTEMAS Y COMPUTACIÓN OPCIÓN I TESIS: Desarrollo de Algoritmos de Retroceso Aplicados a la solución del Problema del Diseño de la
1INSTITUTO TECNOLÓGICO DE CIUDAD MADERO DEPARTAMENTO DE INGENIERÍA EN SISTEMAS Y COMPUTACIÓN OPCIÓN I TESIS: Desarrollo de Algoritmos de Retroceso Aplicados a la solución del Problema del Diseño de la
Búsqueda en e.e. --> reglas para elegir entre las ramas que con más probabilidad lleven a la solución.
 BÚSQUEDA HEURÍSTICA estudio de los métodos y reglas del descubrimiento y la invención. Búsqueda en e.e. --> reglas para elegir entre las ramas que con más probabilidad lleven a la solución. Situaciones
BÚSQUEDA HEURÍSTICA estudio de los métodos y reglas del descubrimiento y la invención. Búsqueda en e.e. --> reglas para elegir entre las ramas que con más probabilidad lleven a la solución. Situaciones
Inteligencia Artificial
 Inteligencia Artificial II Resolución de problemas mediante búsquedas 1. Introducción Dr. Edgard Iván Benítez Guerrero cursofei@gmail.com 1 1. Introducción Agentes solucionadores de problemas Problemas
Inteligencia Artificial II Resolución de problemas mediante búsquedas 1. Introducción Dr. Edgard Iván Benítez Guerrero cursofei@gmail.com 1 1. Introducción Agentes solucionadores de problemas Problemas
Curso: Métodos de Monte Carlo Unidad 3, Sesión 7: Problemas de conteo
 Curso: Métodos de Monte Carlo Unidad 3, Sesión 7: Problemas de conteo Departamento de Investigación Operativa Instituto de Computación, Facultad de Ingeniería Universidad de la República, Montevideo, Uruguay
Curso: Métodos de Monte Carlo Unidad 3, Sesión 7: Problemas de conteo Departamento de Investigación Operativa Instituto de Computación, Facultad de Ingeniería Universidad de la República, Montevideo, Uruguay
Tema 3: Problemas de Satisfacción de Restricciones
 Tema 3: Problemas de Satisfacción de Restricciones Universidad de Granada Tema 3: Satisfacción de Restricciones Contenido Problemas de satisfacción de restricciones Métodos de búsqueda Búsqueda local para
Tema 3: Problemas de Satisfacción de Restricciones Universidad de Granada Tema 3: Satisfacción de Restricciones Contenido Problemas de satisfacción de restricciones Métodos de búsqueda Búsqueda local para
Árboles Filogenéticos. BT7412, CC5702 Bioinformática Diego Arroyuelo. 2 de noviembre de 2010
 Unidad 6: Árboles Filogenéticos BT7412, CC5702 Bioinformática Diego Arroyuelo 2 de noviembre de 2010 Temario (Introduction to Computational Molecular Biology Setubal y Meidanis Capítulo 6) 1. Introducción
Unidad 6: Árboles Filogenéticos BT7412, CC5702 Bioinformática Diego Arroyuelo 2 de noviembre de 2010 Temario (Introduction to Computational Molecular Biology Setubal y Meidanis Capítulo 6) 1. Introducción
Diagramas de Bloques
 1! Diagrama de Bloques y Grafos Juan Antonio Hernández Tamames, Susana Borromeo Curso 2014-2015 Diagramas de Bloques 2! Representación en Diagramas de Bloques Álgebra de Bloques 1 Ideas Básicas 3! Los
1! Diagrama de Bloques y Grafos Juan Antonio Hernández Tamames, Susana Borromeo Curso 2014-2015 Diagramas de Bloques 2! Representación en Diagramas de Bloques Álgebra de Bloques 1 Ideas Básicas 3! Los
Estructura de un modelo GAMS (1/3)
") GAMS Contenido Estructura de un modelo en GAMS. Ejemplo a través del cual se ilustra el lenguaje Conjuntos Datos Variables Ecuaciones Sumatoria y Productoria Definición de escuaciones Función Objetivo
GAMS Contenido Estructura de un modelo en GAMS. Ejemplo a través del cual se ilustra el lenguaje Conjuntos Datos Variables Ecuaciones Sumatoria y Productoria Definición de escuaciones Función Objetivo
Coloreo de vértices Definiciones: Coloreo de Grafos. Cotas para χ Proposición: Si H es un subgrafo de G entonces χ(h) χ(g).
 χ(g).") Coloreo de vértices Definiciones: Coloreo de Grafos Algoritmos y Estructuras de Datos III Un coloreo (válido) de los vértices de un grafo G = (V, X ) es una asignación f : V C, tal que f (v) f (u) (u,
Coloreo de vértices Definiciones: Coloreo de Grafos Algoritmos y Estructuras de Datos III Un coloreo (válido) de los vértices de un grafo G = (V, X ) es una asignación f : V C, tal que f (v) f (u) (u,
La Tecnología de Resolución de Restricciones 1. Rodolfo Fernández González. Planificación y Diseño: actualidad de los problemas de configuración
 La Tecnología de Resolución de Restricciones 1 Rodolfo Fernández González Ante el boom de la demanda de aplicaciones de planificación y asignación de recursos, la tecnología de resolución de restricciones
La Tecnología de Resolución de Restricciones 1 Rodolfo Fernández González Ante el boom de la demanda de aplicaciones de planificación y asignación de recursos, la tecnología de resolución de restricciones
Parte de Algoritmos de la asignatura de Programación Master de Bioinformática. Búsqueda exhaustiva
 Parte de Algoritmos de la asignatura de Programación Master de Bioinformática Búsqueda exhaustiva Web asignatura: http://dis.um.es/~domingo/algbio.html E-mail profesor: domingo@um.es Transparencias preparadas
Parte de Algoritmos de la asignatura de Programación Master de Bioinformática Búsqueda exhaustiva Web asignatura: http://dis.um.es/~domingo/algbio.html E-mail profesor: domingo@um.es Transparencias preparadas
CONTENIDO. 1.- Introducción a la Inteligencia Artificial (IA) 2.- Lógica de predicados. 3.- Búsqueda de soluciones
 2.- Lógica de predicados. 3.- Búsqueda de soluciones") CONTENIDO 1.- Introducción a la Inteligencia Artificial (IA) 2.- Lógica de predicados 3.- Búsqueda de soluciones 4.- Lenguajes de IA e Introducción a Sistemas Expertos 1.- Introducción a la Inteligencia
CONTENIDO 1.- Introducción a la Inteligencia Artificial (IA) 2.- Lógica de predicados 3.- Búsqueda de soluciones 4.- Lenguajes de IA e Introducción a Sistemas Expertos 1.- Introducción a la Inteligencia
GRAFOS. Prof. Ing. M.Sc. Fulbia Torres
 ESTRUCTURAS DE DATOS 2006 Prof. DEFINICIÓN Un grafo consta de un conjunto de nodos(o vértices) y un conjunto de arcos (o aristas). Cada arco de un grafo se especifica mediante un par de nodos. Denotemos
ESTRUCTURAS DE DATOS 2006 Prof. DEFINICIÓN Un grafo consta de un conjunto de nodos(o vértices) y un conjunto de arcos (o aristas). Cada arco de un grafo se especifica mediante un par de nodos. Denotemos
ESTRUCTURA DE DATOS. ABB Arboles de Búsqueda Binaria
 ESTRUCTURA DE DATOS ABB Arboles de Búsqueda Binaria ÁRBOLES BINARIOS Hasta ahora nos hemos dedicado a estudiar TAD que de una u otra forma eran de naturaleza lineal, o unidimensional. En los tipos abstractos
ESTRUCTURA DE DATOS ABB Arboles de Búsqueda Binaria ÁRBOLES BINARIOS Hasta ahora nos hemos dedicado a estudiar TAD que de una u otra forma eran de naturaleza lineal, o unidimensional. En los tipos abstractos
INDICE INTRODUCCION1 DESARROLLO2 GRAFOS (CONCEPTO).2 ARISTAS...2 VERTICES2 CAMINOS.3 CLASIFICACION DE GRAFOS...3 GRAFOS EULERIANOS.
.2 ARISTAS...2 VERTICES2 CAMINOS.3 CLASIFICACION DE GRAFOS...3 GRAFOS EULERIANOS.") INDICE INTRODUCCION1 DESARROLLO2 GRAFOS (CONCEPTO).2 ARISTAS...2 VERTICES2 CAMINOS.3 CLASIFICACION DE GRAFOS...3 GRAFOS EULERIANOS.7 GRAFOS CONEXOS7 ÁRBOLES..7 BOSQUES DE ÁRBOLES...8 RECORRIDO DE UN GRAFO..8
INDICE INTRODUCCION1 DESARROLLO2 GRAFOS (CONCEPTO).2 ARISTAS...2 VERTICES2 CAMINOS.3 CLASIFICACION DE GRAFOS...3 GRAFOS EULERIANOS.7 GRAFOS CONEXOS7 ÁRBOLES..7 BOSQUES DE ÁRBOLES...8 RECORRIDO DE UN GRAFO..8
Tema 8: Árboles de decisión
 Introducción a la Ingeniería del Conocimiento Curso 2004 2005 Tema 8: Árboles de decisión Miguel A. Gutiérrez Naranjo Dpto. de Ciencias de la Computación e Inteligencia Artificial Universidad de Sevilla
Introducción a la Ingeniería del Conocimiento Curso 2004 2005 Tema 8: Árboles de decisión Miguel A. Gutiérrez Naranjo Dpto. de Ciencias de la Computación e Inteligencia Artificial Universidad de Sevilla
UNIVERSIDAD MAYOR DE SAN SIMÓN FACULTAD DE CIENCIAS Y TECNOLOGÍA INGENIERÍA DE SISTEMAS BÚSQUEDA PRIMERO EL MEJOR
 UNIVERSIDAD MAYOR DE SAN SIMÓN FACULTAD DE CIENCIAS Y TECNOLOGÍA INGENIERÍA DE SISTEMAS BÚSQUEDA PRIMERO EL MEJOR INTEGRANTES: Caricari Cala Aquilardo Villarroel Fernandez Fructuoso DOCENTE: Lic. Garcia
UNIVERSIDAD MAYOR DE SAN SIMÓN FACULTAD DE CIENCIAS Y TECNOLOGÍA INGENIERÍA DE SISTEMAS BÚSQUEDA PRIMERO EL MEJOR INTEGRANTES: Caricari Cala Aquilardo Villarroel Fernandez Fructuoso DOCENTE: Lic. Garcia
TEMA IV TEORÍA DE GRAFOS
 TEMA IV TEORÍA DE GRAFOS Poli Abascal Fuentes TEMA IV Teoría de grafos p. 1/? TEMA IV 4. TEORÍA DE GRAFOS 4.1 GRAFOS 4.1.1 Introducción 4.1.2 Definiciones básicas 4.1.3 Caminos y recorridos 4.1.4 Subgrafos,
TEMA IV TEORÍA DE GRAFOS Poli Abascal Fuentes TEMA IV Teoría de grafos p. 1/? TEMA IV 4. TEORÍA DE GRAFOS 4.1 GRAFOS 4.1.1 Introducción 4.1.2 Definiciones básicas 4.1.3 Caminos y recorridos 4.1.4 Subgrafos,
Inteligencia Artificial Clase #3 Agente Solucionador de Problemas. Dr. Wladimir Rodríguez Postgrado en Computación
 Clase #3 Agente Solucionador de Problemas Postgrado en Computación wladimir@ula.ve Agenda Agente Solucionador de Tareas Formulación de los Problemas Espacio de Estados Problemas de Búsqueda Búsqueda en
Clase #3 Agente Solucionador de Problemas Postgrado en Computación wladimir@ula.ve Agenda Agente Solucionador de Tareas Formulación de los Problemas Espacio de Estados Problemas de Búsqueda Búsqueda en
Inteligencia Artificial. Aprendizaje neuronal. Ing. Sup. en Informática, 4º. Curso académico: 2011/2012 Profesores: Ramón Hermoso y Matteo Vasirani
 Inteligencia Artificial Aprendizaje neuronal Ing. Sup. en Informática, 4º Curso académico: 20/202 Profesores: Ramón Hermoso y Matteo Vasirani Aprendizaje Resumen: 3. Aprendizaje automático 3. Introducción
Inteligencia Artificial Aprendizaje neuronal Ing. Sup. en Informática, 4º Curso académico: 20/202 Profesores: Ramón Hermoso y Matteo Vasirani Aprendizaje Resumen: 3. Aprendizaje automático 3. Introducción
Tema No. 3 Métodos de Resolución de Modelos de Programación Lineal. El Método Gráfico y Método Simplex Autoevaluación y Ejercicios Propuestos
 UNIVERSIDAD NACIONAL EXPERIMENTAL FRANCISCO DE MIRANDA ÁREA DE TECNOLOGÍA DEPARTAMENTO DE GERENCIA INVESTIGACIÓN DE OPERACIONES PROFESOR: Dr. JUAN LUGO MARÍN Tema No. 3 Métodos de Resolución de Modelos
UNIVERSIDAD NACIONAL EXPERIMENTAL FRANCISCO DE MIRANDA ÁREA DE TECNOLOGÍA DEPARTAMENTO DE GERENCIA INVESTIGACIÓN DE OPERACIONES PROFESOR: Dr. JUAN LUGO MARÍN Tema No. 3 Métodos de Resolución de Modelos
TEORÍA DE GRAFOS Ingeniería de Sistemas
 TEORÍA DE GRAFOS Ingeniería de Sistemas Código: MAT-31114 AUTORES Ing. Daniel Zambrano Ing. Viviana Semprún UNIDADES DE LA ASIGNATURA» UNIDAD I. Relaciones» UNIDAD II. Estructuras Algebraicas» UNIDAD III.
TEORÍA DE GRAFOS Ingeniería de Sistemas Código: MAT-31114 AUTORES Ing. Daniel Zambrano Ing. Viviana Semprún UNIDADES DE LA ASIGNATURA» UNIDAD I. Relaciones» UNIDAD II. Estructuras Algebraicas» UNIDAD III.
CAPÍTULO 4 PROGRAMACIÓN LINEAL ENTERA
 CAPÍTULO 4 PROGRAMACIÓN LINEAL ENTERA Programación Lineal Entera Es una técnica que permite modelar y resolver problemas cuya característica principal es que el conjunto de soluciones factibles es discreto.
CAPÍTULO 4 PROGRAMACIÓN LINEAL ENTERA Programación Lineal Entera Es una técnica que permite modelar y resolver problemas cuya característica principal es que el conjunto de soluciones factibles es discreto.
Análisis y Complejidad de Algoritmos. Arboles Binarios. Arturo Díaz Pérez
 Análisis y Complejidad de Algoritmos Arboles Binarios Arturo Díaz Pérez Arboles Definiciones Recorridos Arboles Binarios Profundidad y Número de Nodos Arboles-1 Arbol Un árbol es una colección de elementos,
Análisis y Complejidad de Algoritmos Arboles Binarios Arturo Díaz Pérez Arboles Definiciones Recorridos Arboles Binarios Profundidad y Número de Nodos Arboles-1 Arbol Un árbol es una colección de elementos,
Hiperheurísticas Mediante un Enfoque Neuro-Evolutivo para el Ordenamiento Dinámico de Variables en Problemas de Satisfacción de Restricciones
 Hiperheurísticas Mediante un Enfoque Neuro-Evolutivo para el Ordenamiento Dinámico de Variables en Problemas de Satisfacción de Restricciones TESIS Maestría en Ciencias en Sistemas Inteligentes Instituto
Hiperheurísticas Mediante un Enfoque Neuro-Evolutivo para el Ordenamiento Dinámico de Variables en Problemas de Satisfacción de Restricciones TESIS Maestría en Ciencias en Sistemas Inteligentes Instituto
Bases Formales de la Computación: Redes de Bayes (segunda parte)
") Bases Formales de la Computación: Redes de Bayes (segunda parte) Departamento de Ciencias e Ingeniería de la Computación Pontificia Universidad Javeriana Cali Periodo 2008-2 Razonamiento en Redes de Bayes
Bases Formales de la Computación: Redes de Bayes (segunda parte) Departamento de Ciencias e Ingeniería de la Computación Pontificia Universidad Javeriana Cali Periodo 2008-2 Razonamiento en Redes de Bayes
Es un conjunto de objetos llamados vértices o nodos unidos por enlaces llamados aristas o arcos, que permiten representar relaciones binarias entre
 Es un conjunto de objetos llamados vértices o nodos unidos por enlaces llamados aristas o arcos, que permiten representar relaciones binarias entre elementos de un conjunto. Típicamente, un grafo se representa
Es un conjunto de objetos llamados vértices o nodos unidos por enlaces llamados aristas o arcos, que permiten representar relaciones binarias entre elementos de un conjunto. Típicamente, un grafo se representa
Diseño óptimo de estructuras. p. 1/30. mecánicas bajo incertidumbre en las cargas
 Diseño óptimo de estructuras mecánicas bajo incertidumbre en las cargas Felipe Alvarez y Miguel Carrasco II Encuentro Núcleo Científico Milenio Sistemas Complejos de Ingeniería Universidad de Chile 15-16
Diseño óptimo de estructuras mecánicas bajo incertidumbre en las cargas Felipe Alvarez y Miguel Carrasco II Encuentro Núcleo Científico Milenio Sistemas Complejos de Ingeniería Universidad de Chile 15-16
Molinos de viento no-derogatorios
 Molinos de viento no-derogatorios 69 Notas de Matemática, No. 245 Mérida, 2006 Molinos de viento no-derogatorios Juan Rada Abstract Un grafo dirigido G es no-derogatorio si su matriz de adyacencia A es
Molinos de viento no-derogatorios 69 Notas de Matemática, No. 245 Mérida, 2006 Molinos de viento no-derogatorios Juan Rada Abstract Un grafo dirigido G es no-derogatorio si su matriz de adyacencia A es
ARIS: Architecture of Integrated Information Systems
 Sistemas de Información para Administración de Operaciones 2003 Arquitectura de ARIS (Architecture of Integrated Information Systems) Modelos de Referencia SAP R/3 ARIS: Architecture of Integrated Information
Sistemas de Información para Administración de Operaciones 2003 Arquitectura de ARIS (Architecture of Integrated Information Systems) Modelos de Referencia SAP R/3 ARIS: Architecture of Integrated Information
Práctica N o 8 Desigualdades Válidas - Algoritmos de Planos de Corte - Algoritmos Branch & Cut
 Práctica N o 8 Desigualdades Válidas - Algoritmos de Planos de Corte - Algoritmos Branch & Cut 8.1 Para cada uno de los siguientes conjuntos, encontrar una desigualdad válida que agregada a la formulación
Práctica N o 8 Desigualdades Válidas - Algoritmos de Planos de Corte - Algoritmos Branch & Cut 8.1 Para cada uno de los siguientes conjuntos, encontrar una desigualdad válida que agregada a la formulación
Árboles balanceados (AVL) Tablas de dispersión (Hash) Colas de prioridad (Heap)
 Tablas de dispersión (Hash) Colas de prioridad (Heap)") Práctico 4 Árboles balanceados (AVL) Tablas de dispersión (Hash) Colas de prioridad (Heap) Clasificación de ejercicios: (I) Imprescindibles (R) Recomendados (C) Complementarios Árboles balanceados (AVL)
Práctico 4 Árboles balanceados (AVL) Tablas de dispersión (Hash) Colas de prioridad (Heap) Clasificación de ejercicios: (I) Imprescindibles (R) Recomendados (C) Complementarios Árboles balanceados (AVL)
Francis Guthrie Planteo el problema de los cuatro colores, después de colorear el mapa de Inglaterra 9/15/2015 3
 INTRODUCCION GRAFOS La Teoria de Grafos nace del análisis sobre una inquietud presentada en la isla Kueiphof en Koenigsberg (Pomerania) ya que el río que la rodea se divide en dos brazos. Sobre los brazos
INTRODUCCION GRAFOS La Teoria de Grafos nace del análisis sobre una inquietud presentada en la isla Kueiphof en Koenigsberg (Pomerania) ya que el río que la rodea se divide en dos brazos. Sobre los brazos
Arboles. Definiciones formales: 1) un árbol es un grafo acíclico finito T (P, E) tal que. P = E + 1 => todo arco es desconectante.
 un árbol es un grafo acíclico finito T (P, E) tal que. P = E + 1 => todo arco es desconectante.") Arboles Definición: Es una estructura acíclica que, en algún sentido puede ser considerado el siguiente paso en la jerarquía de complejidad estructural. Los árboles tienen son de amplia aplicación en el
Arboles Definición: Es una estructura acíclica que, en algún sentido puede ser considerado el siguiente paso en la jerarquía de complejidad estructural. Los árboles tienen son de amplia aplicación en el
TEMA 3 ÁLGEBRA DE CONMUTACIÓN
 TEMA 3 ÁLGEBRA DE CONMUTACIÓN TEMA 3: Álgebra de Boole ÍNDICE. POSTULADOS DEL ÁLGEBRA DE CONMUTACIÓN 2. ÁLGEBRA DE BOOLE BIVALENTE O ÁLGEBRA DE CONMUTACIÓN 2. Teoremas del álgebra de conmutación 3. VARIABLES
TEMA 3 ÁLGEBRA DE CONMUTACIÓN TEMA 3: Álgebra de Boole ÍNDICE. POSTULADOS DEL ÁLGEBRA DE CONMUTACIÓN 2. ÁLGEBRA DE BOOLE BIVALENTE O ÁLGEBRA DE CONMUTACIÓN 2. Teoremas del álgebra de conmutación 3. VARIABLES
UNIDAD DOS MODELO DE ASIGNACIÓN
 Ing. César Urquizú UNIDAD DOS MODELO DE ASIGNACIÓN Ing. César Urquizú Modelos de Transporte Método de la Esquina Noroeste Método del Costo Mínimo o Menor Método de Aproximación de Vogel (MAV) Método del
Ing. César Urquizú UNIDAD DOS MODELO DE ASIGNACIÓN Ing. César Urquizú Modelos de Transporte Método de la Esquina Noroeste Método del Costo Mínimo o Menor Método de Aproximación de Vogel (MAV) Método del
Fundamentos de Investigación de Operaciones Modelos de Grafos
 Fundamentos de Investigación de Operaciones de junio de 00 Muchos problemas de optimización puedes ser analizados y resueltos a través de representaciones gráficas. Tal es el caso de los problemas de planificación
Fundamentos de Investigación de Operaciones de junio de 00 Muchos problemas de optimización puedes ser analizados y resueltos a través de representaciones gráficas. Tal es el caso de los problemas de planificación
5. MODELO A IMPLEMENTAR.
 5. MODELO A IMPLEMENTAR. La motivación principal del modelo propuesto es la planificación de la ejecución de pruebas funcionales, de manera que ésta se pueda realizar en el menor tiempo posible. Para planificar
5. MODELO A IMPLEMENTAR. La motivación principal del modelo propuesto es la planificación de la ejecución de pruebas funcionales, de manera que ésta se pueda realizar en el menor tiempo posible. Para planificar
El proyecto realizado consiste en un resolutor de sudokus mediante CSP.
 Introducción El proyecto realizado consiste en un resolutor de sudokus mediante CSP. El problema del sudoku fue inventado por Howard Garns en 1979 y se volvió muy popular en Japón en 1986. En España ha
Introducción El proyecto realizado consiste en un resolutor de sudokus mediante CSP. El problema del sudoku fue inventado por Howard Garns en 1979 y se volvió muy popular en Japón en 1986. En España ha
Práctica N 6 Modelos de Programación Lineal Entera
 Práctica N 6 Modelos de Programación Lineal Entera 6.1 Una empresa textil fabrica 3 tipos de ropa: camisas, pantalones y shorts. Las máquinas necesarias para la confección deben ser alquiladas a los siguientes
Práctica N 6 Modelos de Programación Lineal Entera 6.1 Una empresa textil fabrica 3 tipos de ropa: camisas, pantalones y shorts. Las máquinas necesarias para la confección deben ser alquiladas a los siguientes
- Contenido UNIVERSIDAD NACIONAL DE INGENIERÍA UNI-NORTE SEDE ESTELI. Carrera: Ingeniería de Sistemas
 UNIVERSIDAD NACIONAL DE INGENIERÍA UNI-NORTE SEDE ESTELI Carrera: Ingeniería de Sistemas Nombre de la asignatura: Investigación de Operaciones I Año académico: Tercer año Semestre: Sexto - Contenido I-
UNIVERSIDAD NACIONAL DE INGENIERÍA UNI-NORTE SEDE ESTELI Carrera: Ingeniería de Sistemas Nombre de la asignatura: Investigación de Operaciones I Año académico: Tercer año Semestre: Sexto - Contenido I-
Tema 2: Métodos de Deducción para la Lógica Proposicional
 Tema 2: Métodos de Deducción para la Lógica Proposicional Dpto. Ciencias de la Computación Inteligencia Artificial Universidad de Sevilla Lógica y Computabilidad Curso 2010 11 LC, 2010 11 Métodos de Deducción
Tema 2: Métodos de Deducción para la Lógica Proposicional Dpto. Ciencias de la Computación Inteligencia Artificial Universidad de Sevilla Lógica y Computabilidad Curso 2010 11 LC, 2010 11 Métodos de Deducción
Tema 1: Sintaxis y Semántica de la Lógica Proposicional
 Tema 1: Sintaxis y Semántica de la Lógica Proposicional Dpto. Ciencias de la Computación e Inteligencia Artificial Universidad de Sevilla Lógica y Computabilidad Curso 2010 11 LC, 2010 11 Lógica Proposicional
Tema 1: Sintaxis y Semántica de la Lógica Proposicional Dpto. Ciencias de la Computación e Inteligencia Artificial Universidad de Sevilla Lógica y Computabilidad Curso 2010 11 LC, 2010 11 Lógica Proposicional
Tema 2: Optimización lineal. Ezequiel López Rubio Departamento de Lenguajes y Ciencias de la Computación Universidad de Málaga
 Tema 2: Optimización lineal Ezequiel López Rubio Departamento de Lenguajes y Ciencias de la Computación Universidad de Málaga Sumario El modelo de programación lineal Formulación de modelos Método gráfico
Tema 2: Optimización lineal Ezequiel López Rubio Departamento de Lenguajes y Ciencias de la Computación Universidad de Málaga Sumario El modelo de programación lineal Formulación de modelos Método gráfico
Análisis y síntesis de sistemas digitales combinacionales
 Análisis Algoritmo de análisis, para un circuito lógico combinacional Síntesis. Conceptos Circuitos combinacionales bien construidos Circuitos combinacionales mal construidos Criterios de optimización
Análisis Algoritmo de análisis, para un circuito lógico combinacional Síntesis. Conceptos Circuitos combinacionales bien construidos Circuitos combinacionales mal construidos Criterios de optimización
MODELIZACION 01. Universidad Nacional de La Pampa Facultad de Ciencias Económicas y Jurídicas 18 - Métodos Cuantitativos para la Administración
 Bibliografía Mathur y Solow; Investigación de Operaciones - El arte de la toma de decisiones. Ed. Prentice Hall Anderson, Sweeney y Williams; Introducción a los modelos cuantitativos para Administración.
Bibliografía Mathur y Solow; Investigación de Operaciones - El arte de la toma de decisiones. Ed. Prentice Hall Anderson, Sweeney y Williams; Introducción a los modelos cuantitativos para Administración.
Con miras a conocer la metodología que se aplica en el Método SIMPLEX, tenemos a continiacion un ejemplo:
 Método Simplex. Este método fue creado en el año 1947 por el estadounidense George Bernard Dantzig y el ruso Leonid Vitalievich Kantorovich, con el objetivo de crear un algoritmo capaz de crear soluciones
Método Simplex. Este método fue creado en el año 1947 por el estadounidense George Bernard Dantzig y el ruso Leonid Vitalievich Kantorovich, con el objetivo de crear un algoritmo capaz de crear soluciones
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO MATERIA: MATEMÁTICAS II
 UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO MATERIA: MATEMÁTICAS II INSTRUCCIONES GENERALES Y VALORACIÓN El alumno contestará a
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBA DE ACCESO A LAS ENSEÑANZAS UNIVERSITARIAS OFICIALES DE GRADO MATERIA: MATEMÁTICAS II INSTRUCCIONES GENERALES Y VALORACIÓN El alumno contestará a
Métodos de Inteligencia Artificial
 Métodos de Inteligencia Artificial L. Enrique Sucar (INAOE) esucar@inaoep.mx ccc.inaoep.mx/esucar Tecnologías de Información UPAEP Agentes basados en conocimiento Contenido Sistemas basados en conocimiento
Métodos de Inteligencia Artificial L. Enrique Sucar (INAOE) esucar@inaoep.mx ccc.inaoep.mx/esucar Tecnologías de Información UPAEP Agentes basados en conocimiento Contenido Sistemas basados en conocimiento
El método simplex 1. 1 Forma estándar y cambios en el modelo. 2 Definiciones. 3 Puntos extremos y soluciones factibles básicas. 4 El método simplex.
 El método simplex Forma estándar y cambios en el modelo. Definiciones. Puntos extremos y soluciones factibles básicas. 4 El método simplex. Definiciones y notación. Teoremas. Solución factible básica inicial.
El método simplex Forma estándar y cambios en el modelo. Definiciones. Puntos extremos y soluciones factibles básicas. 4 El método simplex. Definiciones y notación. Teoremas. Solución factible básica inicial.
Inteligencia de enjambres
 Inteligencia de enjambres Diego Milone Inteligencia Computacional Departamento de Informática FICH-UNL Autómata de estados finitos Definición A =< X, Y, E, D > Autómata de estados finitos Definición A
Inteligencia de enjambres Diego Milone Inteligencia Computacional Departamento de Informática FICH-UNL Autómata de estados finitos Definición A =< X, Y, E, D > Autómata de estados finitos Definición A
Autómatas Deterministas. Ivan Olmos Pineda
 Autómatas Deterministas Ivan Olmos Pineda Introducción Los autómatas son una representación formal muy útil, que permite modelar el comportamiento de diferentes dispositivos, máquinas, programas, etc.
Autómatas Deterministas Ivan Olmos Pineda Introducción Los autómatas son una representación formal muy útil, que permite modelar el comportamiento de diferentes dispositivos, máquinas, programas, etc.
Probabilidad y Estadística
 Probabilidad y Estadística Probabilidad Conceptos como probabilidad, azar, aleatorio son tan viejos como la misma civilización. Y es que a diario utilizamos el concepto de probabilidad: Quizá llueva mañana
Probabilidad y Estadística Probabilidad Conceptos como probabilidad, azar, aleatorio son tan viejos como la misma civilización. Y es que a diario utilizamos el concepto de probabilidad: Quizá llueva mañana
Tema 3 Optimización lineal. Algoritmo del simplex
 Tema 3 Optimización lineal. Algoritmo del simplex José R. Berrendero Departamento de Matemáticas Universidad Autónoma de Madrid Contenidos del tema 3 Teorema fundamental de la programación lineal. Algoritmo
Tema 3 Optimización lineal. Algoritmo del simplex José R. Berrendero Departamento de Matemáticas Universidad Autónoma de Madrid Contenidos del tema 3 Teorema fundamental de la programación lineal. Algoritmo