UNIVERSIDAD NACIONAL DE PIURA
|
|
|
- Rafael Espinoza Serrano
- hace 8 años
- Vistas:
Transcripción
1 UNIVERSIDAD NACIONAL DE PIURA FACULTAD DE CIENCIAS ESCUELA PROFESIONAL DE INGENIERÍA ELECTRÓNICA Y TELECOMUNICACIONES DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE ALARMAS UTILIZANDO PROTOCOLO RS485 Y TECNOLOGÍA GSM PARA LOS PABELLONES DE LA UNIVERSIDAD NACIONAL DE PIURA TESIS PARA OPTAR EL TITULO PROFESIONAL DE: INGENIERO ELECTRÓNICO Y TELECOMUNICACIONES ESPINO AGUIRRE - HEBERT EDUARDO GARCIA ELESPURU - MARYLIN CHRIS PIURA PERÚ 2010

2 DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE ALARMAS UTILIZANDO PROTOCOLO RS485 Y TECNOLOGÍA GSM PARA LOS PABELLONES DE LA UNIVERSIDAD NACIONAL DE PIURA TESIS PRESENTADA A LA FACULTAD DE CIENCIAS COMO REQUISITO PARA OPTAR EL TÍTULO DE: ING. ELECTRÓNICO Y TELECOMUNICACIONES ESPINO AGUIRRE HEBERT EDUARDO EJECUTOR GARCÍA ELESPURU MARYLIN CHRIS EJECUTOR MSc. JUAN M. JACINTO SANDOVAL ASESOR APROBADA POR: JURADO: ING. EDUARDO AVILA REGALADO PRESIDENTE ING. OMAR BARRA ZAPATA SECRETARIO ING. CARLOS ARELLANO RAMIREZ VOCAL PIURA PERÚ

3 INTRODUCCIÓN 3

4 INTRODUCCIÓN A medida que el tiempo pasa, el hombre ha logrado ingeniar sistemas que faciliten nuestro estilo de vida y para bien de nosotros, estos cambios han ido ocurriendo, en el área que más aporta a conseguir este objetivo; que es precisamente la Electrónica. Con el desarrollo de la tecnología, tanto el software como el hardware avanzan, los dispositivos electrónicos son cada vez mas sofisticado y tienden a la miniaturización, además cada vez mas, a los sensores se les dota de inteligencia. Los sistemas de alarma, son parte de ésta tecnología, son parte de la electrónica y juegan un papel muy importante en la seguridad, ya sea en casas domésticas, oficinas, instituciones, etc. Justamente nuestra Universidad Nacional de Piura, es una institución, y como tal es vulnerable a los robos, gran problema, ya que sustraen equipos muy útilies para los alumnos. Tal vez un sencillo Sistema de Alarmas, puede ayudarnos a solucionar este problema, pues, se trata de estudiar bien las zonas y las formas de transmitir señales, para hacer un buen diseño y posteriormente una buena implementación. Dentro de tantos diseños de circuitos basados en Sistemas Embebidos; hemos escogido desarrollar una aplicación con Microcontroladores, asimismo tomando referencias de las Redes Industriales, incluimos Comunicación RS-485, y por ultimo; acorde a la vanguardia de la Tecnología, la Aplicación del Servicio GSM hace de este proyecto un diseño interesante puesto que el Teléfono Celular se ha convertido en un aparato que siempre se tiene al alcance de la mano, y así podemos tener el control de la seguridad en nuestras manos. 4

5 RESUMEN Este proyecto consiste en desarrollar una central de mando (Tarjeta que consta de un PIC conectado a un Celular), que monitorea de manera autónoma las Estaciones (Tarjetas que constan de un PIC que recibe las señales de los sensores que comanda), y todas estas se comunican entre si mediante una red tipo Bus capaz de transferir datos de manera bidireccional (RS-485 ). Cada Estación es autónoma, independientemente de la central, es decir si se dispara una alarma en un pabellón, se disparará la alarma, sistema audible, pero no se enviará un mensaje al celular, ya que esta función se realiza, cuando hay comunicación con la tarjeta central. Se pueden colocar sensores del tipo on off, de acuerdo a las necesidades de cada pabellón. La central, recibe, via comunicación RS485, el estado actual de las alarmas. En caso de que reciba el disparo de una alarma, ésta enviará un mensaje de texto al teléfono celular o celulares del personal de seguridad encargados del respectivo edificio. Opcionalmente la central estará conectada a una computadora personal, donde se ha instalado un software de monitoreo que permitirá visualizar el estado de los sensores del Sistema de seguridad. 5

6 INDICE INTRODUCCIÓN... 3 INTRODUCCIÓN... 4 RESUMEN... 5 CAPITULO I DELIMITACIÓN DEL PROBLEMA DELIMITACIÓN DEL PROBLEMA ANTECEDENTES OBJETIVO GENERAL OBJETIVOS ESPECÍFICOS HIPÓTESIS VARIABLES CAPITULO II MARCO TEORICO CONCEPTUAL MICROCONTROLADORES QUE ES UN MICROCONTROLADOR DIFERENCIA ENTRE MICROPROCESADOR Y MICROCONTROLADOR ARQUITECTURA INTERNA EL PROCESADOR MEMORIA DE PROGRAMA ROM CON MÁSCARA EPROM OTP (PROGRAMABLE UNA VEZ) EEPROM FLASH MEMORIA DE DATOS LÍNEAS DE E/S PARA LOS CONTROLADORES DE PERIFÉRICOS RECURSOS ESPECIALES TEMPORIZADORES O "TIMERS" PERRO GUARDIÁN O "WATCHDOG" PROTECCIÓN ANTE FALLO DE ALIMENTACIÓN O "BROWNOUT" ESTADO DE REPOSO Ó DE BAJO CONSUMO CONVERSOR A/D (CAD)

7 CONVERSOR D/A (CDA) COMPARADOR ANALÓGICO MODULADOR DE ANCHURA DE IMPULSOS O PWM PUERTAS DE E/S DIGITALES PUERTAS DE COMUNICACIÓN HERRAMIENTAS PARA EL DESARROLLO DE APLICACIONES ENSAMBLADOR COMPILADOR SIMULADOR PLACAS DE EVALUACIÓN EMULADORES EN CIRCUITO LA FAMILIA DE LOS PIC LAS GAMAS DE PIC La gama enana: PIC12C(F)XXX de 8 patitas Gama baja o básica: PIC16C5X con instrucciones de 12 bits Gama media. PIC16CXXX con instrucciones de 14 bits Gama alta: PIC17CXXX con instrucciones de 16 bits SENSORES CARACTERÍSTICAS DE LOS SENSORES RESOLUCIÓN Y PRECISIÓN PROTOCOLOS DE COMUNICACIÓN RS PRINCIPALES CARACTERISTICAS APLICACIONES COMUNICACIÓN RS CONECTOR RS-232 (DB-9 HEMBRA) CONSTRUCCIÓN FISICA CARACTERÍSTICAS ELÉCTRICAS DE CADA CIRCUITO CELULARES FUNCIONAMIENTO EVOLUCIÓN Y CONVERGENCIA TECNOLÓGICA COMANDOS AT COMANDOS UTILIZADOS Configuración tipo SMS: Configuración aviso SMS Lectura del Número del Centro de Mensajes Envío de mensajes SERVICIO DE MENSAJES CORTOS - SMS CAPITULO III METODOLOGÍA SISTEMA DE SENSORES DETECTORES DE MOVIMIENTO (PIR) DETECTORES MAGNÉTICOS DETECTORES DE ROTURA DE CRISTALES BARRERAS INFRARROJAS SIRENA DE ALARMA

8 3.2 ELECCION DEL MICROCONTROLADOR PRINCIPALES CARACTERÍSTICAS DEL PIC16F84: PRINCIPALES CARACTERÍSTICAS DEL PIC16F DISEÑO DEL HARDWARE DESCRIPCION DEL PUERTO DE COMUNICACIÓN Y CABLES DE CONEXIÓN DEL CELULAR CIRCUITO DE LA CENTRAL DISEÑO DEL SOFTWARE LIMITACIONES DEL PROYECTO CAPITULO IV RESULTADOS OBTENIDOS RESULTADOS OBTENIDOS CAPITULO V CONCLUSIONES CONCLUSIONES CAPITULO VI BIBLIOGRAFÍA BIBLIOGRAFÍA LIBROS PÁGINAS DE INTERNET ANEXOS INDICE DE TABLAS INDICE DE ILUSTRACIONES O FIGURAS DATASHET MAX DATASHET RS DATASHET PIC16F

9 DATASHET PIC16F COMANDO AT DETECTOR DE MOVIMIENTO PIR PARA ILUMINACIÓN SENSOR DE MOVIMIENTO PIR SENSOR MAGNÉTICO PARA APLICACIÓN SENSOR MAGNÉTICO DE CONTROL DE LA ALINEACIÓN DE LA PUERTA DETECTOR DE ROTURA DE CRISTALES X10 S PROGRAMAS CODIGO EN MICROCODE DE LA TARJETA DE ADQUISICIÓN O MASTER CODIGO EN MICROCODE DE LAS TARJETAS DE LOS PROCESOS

10 CAPITULO I DELIMITACIÓN DEL PROBLEMA CAPITULO I DELIMITACIÓN DEL PROBLEMA 10

11 CAPITULO I DELIMITACIÓN DEL PROBLEMA 1.1. DELIMITACIÓN DEL PROBLEMA El desarrollo del presente proyecto es aplicable a toda la infraestructura de la UNP, pero para efectos de Investigación, Implementación y Demostración; éste se delimita en tres pabellones y sus áreas siguientes: Estación 1: Pabellón de laboratorios de la Esc. Prof. Ing. Electrónica y Telecomunicaciones. Zonas a Proteger: Zona 1: Acceso al 2 piso (Escaleras) Zona 2: Almacén de Equipos (debe ser totalmente restringido durante la noche). Estación 2: Pabellón de la Facultad de Ciencias. Zonas a Proteger: Zona 1: Acceso al 2 piso (Escaleras) Zona 2: Oficinas administrtivas (debe ser totalmente restringido durante la noche). Estación 3: Pabellón de aulas de la facultad de Educación. Zonas a Proteger: Zona 1: Acceso al 2 piso y 3 piso (Escaleras) Zona 2: Centro de Cómputo (debe ser totalmente restringido durante la noche) ANTECEDENTES Existen sistemas de alarmas, incluso en nuestra localidad, pero estas, están hechas para trabajar a cortas distancias, los sensores están directamente colocados al panel central y además son comerciales. Para citar algunos ejemplos tenemos: - La conocida empresa de Seguridad PROSEGUR, a través de su service ORUS, ofrece una variedad de Sistemas de Alarmas, tanto domesticas como empresariales que poseen en común la interconexión de estaciones y envío de alertas a una central. 11
 Zona 2: Almacén de Equipos (debe ser totalmente restringido durante la noche). Estación 2: Pabellón de la Facultad de Ciencias.")
12 CAPITULO I DELIMITACIÓN DEL PROBLEMA - La empresa CODIGO ROJO, por su parte ofrece un sistema parecido que consta de sensores infrarrojos, sensores e contacto o magnéticos, panel de control e interconectado y monitoreado desde su central telefónica por un costo de instalación de $ dólares y el mantenimiento del servicio es de $ dólares mensuales por zona. En cuanto a Investigación académica, entre los trabajos similares a este anteproyecto de tesis se encontraron: - El trabajo desarrollado por Araque M. Raúl, en el cual presenta de forma general una de las tendencias tecnológicas en el área de control, como lo es la de los Chips o procesadores Neurón. Estos procesadores constituyen la parte esencial de los Nodos Neurón que tienen un papel muy importante en lo que a Edificios Inteligentes se refiere, ya que permiten la integración de distintos subsistemas y aplicaciones rompiendo así con los esquemas anteriores de control centralizado y de tipo jerárquico que caracterizaban a las redes de control. - La tesis: DISEÑO E IMPLEMENTACIÓN DE UN PROTOTIPO DE MONITOREO REMOTO DE CONTAMINACIÓN AMBIENTAL UTILIZANDO TECNOLOGÍA GSM. 1 Autores: Estrada Jimenez, Juan Carlos y Reinoso Chisaguano, Diego Javier Fecha de publicación: Febrero Ecuador. En este proyecto se desarrolla un sistema que permite monitorear gases de contaminación atmosférica a través de un prototipo que realiza mediciones de forma automática, el cual utiliza un sistema microprocesador para adquirir los datos de

13 CAPITULO I DELIMITACIÓN DEL PROBLEMA sensores de monóxido de carbono (CO), dióxido de carbono (CO2), temperatura y humedad. Los datos adquiridos son enviados en forma de SMS, a través de un teléfono celular, a una aplicación de monitoreo. Esta aplicación recibe los datos, los almacena y permite visualizarlos en forma de gráficas o reportes. Se presentan las pruebas de funcionamiento realizadas en ambiente indoor y ambiente outdoor. Los anexos incluyen las características técnicas de los sensores, comandos AT para el envío de SMS, el código fuente del microcontrolador y el manual de usuario de la aplicación OBJETIVO GENERAL Proporcionar una solución en el planeamiento de un Sistema de Alarmas aplicado para seguridad en los pabellones de la Universidad Nacional de Piura, utilizando protocolo de comunicación RS485 y tecnología GSM OBJETIVOS ESPECÍFICOS a) Realizar un acercamiento al complejo, cambiante y en ocasiones, difuso mundo de los sistemas de supervisión y control de alarmas. b) Proponer para la implementación de las estaciones, el uso de Microcontroladores PIC, por su variedad de aplicaciones, una de ellas: el enlace con la Tecnología Celular mediante los comandos AT c) Obtener una respuesta casi inmediata de parte del sistema de alarmas ante la ocurrencia de un evento, es decir lograr tiempo de respuesta: 500 mseg. 13

14 CAPITULO I DELIMITACIÓN DEL PROBLEMA 1.5. HIPÓTESIS La aplicación de un sistema de alarmas, utilizando protocolo de comunicación RS485 y tecnología GSM, contribuirá con la disminución de los robos de bienes en la Universidad Nacional de Piura VARIABLES Variables Independientes: Sistema de alarmas Variable Dependiente: Seguridad de los pabellones de ciencias de la UNP. 14

15 CAPITULO II MARCO TEORICO CONCEPTUAL CAPITULO II MARCO TEORICO CONCEPTUAL 15

16 CAPITULO II MARCO TEORICO CONCEPTUAL 2.1 MICROCONTROLADORES QUE ES UN MICROCONTROLADOR Es un circuito integrado programable que contiene todos los componentes de un computador. Se emplea para controlar el funcionamiento de una tarea determinada y, debido a su reducido tamaño, suele ir incorporado en el propio dispositivo al que gobierna. Esta última característica es la que le confiere la denominación de «controlador incrustado» (embedded controller). El microcontrolador es un computador dedicado. En su memoria sólo reside un programa destinado a gobernar una aplicación determinada; sus líneas de entrada/salida soportan el conexionado de los sensores y actuadores del dispositivo a controlar, y todos los recursos complementarios disponibles tienen como única finalidad atender sus requerimientos. Una vez programado y configurado el microcontrolador solamente sirve para gobernar la tarea asignada. Un microcontrolador es un computador completo, aunque de limitadas prestaciones, que está contenido en el chip de un circuito integrado y se destina a gobernar una sola tarea. El número de productos que funcionan en base a uno o varios microcontroladores aumenta de forma exponencial. No es aventurado pronosticar que en el siglo XXI habrá pocos elementos que carezcan de microcontrolador. En esta línea de prospección del futuro, la empresa Dataquest calcula que en cada hogar americano existirán varios centenares de Microcontroladores en los comienzos del tercer milenio. La industria Informática acapara gran parte de los microcontroladores que se fabrican. Casi todos los periféricos del computador, desde el ratón o el teclado hasta la impresora, son regulados por el programa de un microcontrolador. Los electrodomésticos de línea blanca (lavadoras, hornos, lavavajillas, etc.) y de línea marrón (televisores, vídeos, aparatos musicales, etc.) 2 Angulo Jose M. Microcontroladores PIC 16

17 CAPITULO II MARCO TEORICO CONCEPTUAL incorporan numerosos microcontroladores. Igualmente, los sistemas de supervisión, vigilancia y alarma en los edificios utilizan estos chips. También se emplean para optimizar el rendimiento de ascensores, calefacción, aire acondicionado, alarmas de incendio, robo, etc DIFERENCIA ENTRE MICROPROCESADOR Y MICROCONTROLADOR El microprocesador es un circuito integrado que contiene la Unidad Central de Proceso (UCP), también llamada procesador, de un computador. La UCP está formada por la Unidad de Control, que interpreta las instrucciones, y el Camino de Datos, que las ejecuta. Las patitas de un microprocesador sacan al exterior las líneas de sus buses de direcciones, datos y control, para permitir conectarle con la Memoria y los Módulos de E/S y configurar un computador implementado por varios circuitos integrados. Se dice que un microprocesador es un sistema abierto porque su configuración es variable de acuerdo con la aplicación a la que se destine. Un microprocesador es un sistema abierto con el que puede construirse un computador con las características que se desee, acoplándole los módulos necesarios. Un microcontrolador es un sistema cerrado que contiene un computador completo y de prestaciones limitadas que no se pueden modificar. 17

18 CAPITULO II MARCO TEORICO CONCEPTUAL Figura 2.1. Estructura de un sistema abierto basado en un microprocesador. La disponibilidad de los buses en el exterior permite que se configure a la medida de la aplicación. Figura 2.2. El microcontrolador en un sistema cerrado. Todas las partes del computador están contenidas en su interior y sólo salen al exterior las líneas que gobiernan los periféricos. Si sólo se dispusiese de un modelo de microcontrolador, éste debería tener muy potenciados todos sus recursos para poderse adaptar a las exigencias de las diferentes aplicaciones. Esta potenciación supondría en muchos casos un despilfarro. En la práctica cada fabricante de 18

19 CAPITULO II MARCO TEORICO CONCEPTUAL microcontroladores oferta un elevado número de modelos diferentes, desde los más sencillos hasta los más poderosos. Es posible seleccionar la capacidad de las memorias, el número de líneas de E/S, la cantidad y potencia de los elementos auxilares, la velocidad de funcionamiento, etc. Por todo ello, un aspecto muy destacado del diseño es la selección del microcontrolador a utilizar ARQUITECTURA INTERNA Un microcontrolador posee todos los componentes de un computador, pero con unas características fijas que no pueden alterarse. Las partes principales de un microcontrolador son: 1. Procesador 2. Memoria no volátil para contener el programa 3. Memoria de lectura y escritura para guardar los datos 4. Líneas de E/S para los controladores de periféricos: a) Comunicación paralelo b) Comunicación serie c) Diversas puertas de comunicación (bus l2c, USB, etc.) 5. Recursos auxiliares: a) Circuito de reloj b) Temporizadores c) Perro Guardíán («watchdog») d) Conversores AD y DA e) Comparadores analógicos f) Protección ante fallos de la alimentación g) Estado de reposo o de bajo consumo A continuación se pasa revista a las características más representativas de cada uno de los componentes del microcontrolador. 19

20 CAPITULO II MARCO TEORICO CONCEPTUAL EL PROCESADOR La necesidad de conseguir elevados rendimientos en el procesamiento de las instrucciones ha desembocado en el empleo generalizado de procesadores de arquitectura Harvard frente a los tradicionales que seguían la arquitectura de von Neumann. Esta última se caracterizaba porque la UCP (Unidad Central de Proceso) se conectaba con una memoria única, donde coexistían datos e instrucciones, a través de un sistema de buses. Figura 2.3. En la arquitectura de «von Neumann» la UCP se comunicaba a través de un sistema de buses con la Memoria, donde se guardaban las instrucciones y los datos. En la arquitectura Harvard son independientes la memoria de instrucciones y la memoria de datos y cada una dispone de su propio sistema de buses para el acceso. Esta dualidad, además de propiciar el paralelismo, permite la adecuación del tamaño de las palabras y los buses a los requerimientos específicos de las instrucciones y de los datos. También la capacidad de cada memoria es diferente. 20
 se conectaba con una memoria única, donde coexistían datos e instrucciones, a través de un sistema de buses. Figura 2.3.")
21 CAPITULO II MARCO TEORICO CONCEPTUAL Figura 2.4. En la arquitectura «Harvard» la memoria de instrucciones y la de datos son independientes, lo que permite optimizar sus características y propiciar el paralelismo. En la figura, la memoria de instrucciones tiene 1 K posiciones de 14 bits cada una, mientras que la de datos sólo dispone de 512 posiciones de un byte. El procesador de los modernos microcontroladores responde a la arquitectura RISC (Computadores de Juego de Instrucciones Reducido), que se identifica por poseer un repertorio de instrucciones máquina pequeño y simple, de forma que la mayor parte de las instrucciones se ejecuta en un ciclo de instrucción. Otra aportación frecuente que aumenta el rendimiento del computador es el fomento del paralelismo implícito, que consiste en la segmentación del procesador (pipe-line), descomponiéndolo en etapas para poder procesar una instrucción diferente en cada una de ellas y trabajar con varias a la vez MEMORIA DE PROGRAMA El microcontrolador está diseñado para que en su memoria de programa se almacenen todas las instrucciones del programa de control. No hay posibilidad de utilizar memorias externas de ampliación. Como el programa a ejecutar siempre es el mismo, debe estar grabado de forma permanente. Los tipos de memoria adecuados para soportar esta función admiten cinco versiones diferentes: 21
22 CAPITULO II MARCO TEORICO CONCEPTUAL ROM CON MÁSCARA En este tipo de memoria el programa se graba en el chip durante el proceso de su fabricación mediante el uso de «máscaras». Los altos costes de diseño e instrumental sólo aconsejan usar este tipo de memoria cuando se precisan series muy grandes EPROM La grabación de esta memoria se realiza mediante un dispositivo físico gobernado desde un computador personal, que recibe el nombre de grabador. En la superficie de la cápsula del microcontrolador existe una ventana de cristal por la que se puede someter al chip de la memoria a rayos ultravioletas para producir su borrado y emplearla nuevamente. Es interesante la memoria EPROM en la fase de diseño y depuración de los programas, pero su coste unitario es elevado OTP (Programable una vez) Este modelo de memoria sólo se puede grabar una vez por parte del usuario, utilizando el mismo procedimiento que con la memoria EPROM. Posteriormente no se puede borrar. Su bajo precio y la sencillez de la grabación aconsejan este tipo de memoria para prototipos finales y series de producción cortas EEPROM La grabación es similar a las memorias OTP y EPROM, pero el borrado es mucho más sencillo al poderse efectuar de la misma forma que el grabado, o sea, eléctricamente. Sobre el mismo zócalo del grabador puede ser programada y borrada tantas veces como se quiera, lo cual la hace ideal en la enseñanza y en la creación de nuevos proyectos. El fabuloso PIC16C84 dispone de 1 K palabras de memoria EEPROM para contener instrucciones y también tiene algunos bytes de memoria de datos de este tipo para evitar que cuando se retira la alimentación se 22
23 CAPITULO II MARCO TEORICO CONCEPTUAL pierda información. Aunque se garantiza de ciclos de escritura/borrado en una EEPROM, todavía su tecnología de fabricación tiene obstáculos para alcanzar capacidades importantes y el tiempo de escritura de las mismas es relativamente grande y con elevado consumo de energía FLASH Se trata de una memoria no volátil, de bajo consumo, que se puede escribir y borrar en circuito al igual que las EEPROM, pero suelen disponer de mayor capacidad que estas últimas. El borrado sólo es posible con bloques completos y no se puede realizar sobre posiciones concretas. En las FLASH se garantizan ciclos de escritura-borrado. Son muy recomendables en aplicaciones en las que sea necesario modificar el programa a lo largo de la vida del producto, como consecuencia del desgaste o cambios de piezas, como sucede con los vehículos. Por sus mejores prestaciones está sustituyendo a la memoria EEPROM para contener instrucciones. De esta forma Microchip comercializa dos microcontroladores prácticamente iguales, que sólo se diferencian en que la memoria de programa de uno de ellos es tipo EEPROM y la del otro tipo Flash. Se trata del PIC 16C84 y el PIC 16F84, respectivamente. En la actualidad Microchip tiene abierta una línea de PIC con memoria Flash cada vez más extensa y utilizada MEMORIA DE DATOS Los datos que manejan los programas varían continuamente, y esto exige que la memoria que les contiene debe ser de lectura y escritura, por lo que la memoria RAM estática (SRAM) es la más adecuada, aunque sea volátil. Hay microcontroladores que también disponen como memoria de datos una de lectura y escritura no volátil, del tipo EEPROM. De esta forma, un 23
24 CAPITULO II MARCO TEORICO CONCEPTUAL corte en el suministro de la alimentación no ocasiona la pérdida de la información, que está disponible al reiniciarse el programa. El PIC16C84, el PIC16F83 y el PIC16F84 disponen de 64 bytes de memoria EEPROM para contener datos Líneas de E/S para los controladores de periféricos A excepción de dos patitas destinadas a recibir la alimentación, otras dos para el cristal de cuarzo, que regula la frecuencia de trabajo, y una más para provocar el Reset, las restantes patitas de un microcontrolador sirven para soportar su comunicación con los periféricos externos que controla. Las líneas de E/S que se adaptan con los periféricos manejan información en paralelo y se agrupan en conjuntos de ocho, que reciben el nombre de Puertas. Hay modelos con líneas que soportan la comunicación en serie; otros disponen de conjuntos de líneas que implementan puertas de comunicación para diversos protocolos, como el I2ºC, el USB, etc RECURSOS ESPECIALES Cada fabricante oferta numerosas versiones de una arquitectura básica de microcontrolador. En algunas amplía las capacidades de las memorias, en otras incorpora nuevos recursos, en otras reduce las prestaciones al mínimo para aplicaciones muy simples, etc. La labor del diseñador es encontrar el modelo mínimo que satisfaga todos los requerimientos de su aplicación. De esta forma, minimizará el costo, el hardware y el software. Los principales recursos específicos que incorporan los microcontroladores son: Temporizadores o "Timers". Perro guardián o "Watchdog". Protección ante fallo de alimentación o "Brownout". Estado de reposo o de bajo consumo. Conversor A/D. Conversor D/A. 24
25 CAPITULO II MARCO TEORICO CONCEPTUAL Comparador analógico. Modulador de anchura de impulsos o PWM. Puertas de E/S digitales. Puertas de comunicación TEMPORIZADORES O "TIMERS" Se emplean para controlar periodos de tiempo (temporizadores) y para llevar la cuenta de acontecimientos que suceden en el exterior (contadores). Para la medida de tiempos se carga un registro con el valor adecuado y a continuación dicho valor se va incrementando o decrementando al ritmo de los impulsos de reloj o algún múltiplo hasta que se desborde y llegue a 0, momento en el que se produce un aviso. Cuando se desean contar acontecimientos que se materializan por cambios de nivel o flancos en alguna de las patitas del microcontrolador, el mencionado registro se va incrementando o decrementando al ritmo de dichos impulsos PERRO GUARDIÁN O "WATCHDOG" Cuando el computador personal se bloquea por un fallo del software u otra causa, se pulsa el botón del reset y se reinicializa el sistema. Pero un microcontrolador funciona sin el control de un supervisor y de forma continuada las 24 horas del día. El Perro guardián consiste en un temporizador que, cuando se desborda y pasa por 0, provoca un reset automáticamente en el sistema. Se debe diseñar el programa de trabajo que controla la tarea de forma que refresque o inicialice al Perro guardián antes de que provoque el reset. Si falla el programa o se bloquea, no se refrescará al Perro guardián y, al completar su temporización, "ladrará y ladrará" hasta provocar el reset. 25
26 CAPITULO II MARCO TEORICO CONCEPTUAL PROTECCIÓN ANTE FALLO DE ALIMENTACIÓN O "BROWNOUT" Se trata de un circuito que resetea al microcontrolador cuando el voltaje de alimentación (VDD) es inferior a un voltaje mínimo ("brownout"). Mientras el voltaje de alimentación sea inferior al de brownout el dispositivo se mantiene reseteado, comenzando a funcionar normalmente cuando sobrepasa dicho valor ESTADO DE REPOSO Ó DE BAJO CONSUMO Son abundantes las situaciones reales de trabajo en que el microcontrolador debe esperar, sin hacer nada, a que se produzca algún acontecimiento externo que le ponga de nuevo en funcionamiento. Para ahorrar energía, (factor clave en los aparatos portátiles), los microcontroladores disponen de una instrucción especial (SLEEP en los PIC), que les pasa al estado de reposo o de bajo consumo, en el cual los requerimientos de potencia son mínimos. En dicho estado se detiene el reloj principal y se "congelan" sus circuitos asociados, quedando sumido en un profundo "sueño" el microcontrolador. Al activarse una interrupción ocasionada por el acontecimiento esperado, el microcontrolador se despierta y reanuda su trabajo CONVERSOR A/D (CAD) Los microcontroladores que incorporan un Conversor A/D (Analógico/Digital) pueden procesar señales analógicas, tan abundantes en las aplicaciones. Suelen disponer de un multiplexor que permite aplicar a la entrada del CAD diversas señales analógicas desde las patitas del circuito integrado. 26
27 CAPITULO II MARCO TEORICO CONCEPTUAL CONVERSOR D/A (CDA) Transforma los datos digitales obtenidos del procesamiento del computador en su correspondiente señal analógica que saca al exterior por una de las patitas de la cápsula. Existen muchos efectores que trabajan con señales analógicas COMPARADOR ANALÓGICO Algunos modelos de microcontroladores disponen internamente de un Amplificador Operacional que actúa como comparador entre una señal fija de referencia y otra variable que se aplica por una de las patitas de la cápsula. La salida del comparador proporciona un nivel lógico 1 ó 0 según una señal sea mayor o menor que la otra. También hay modelos de microcontroladores con un módulo de tensión de referencia que proporciona diversas tensiones de referencia que se pueden aplicar en los comparadores MODULADOR DE ANCHURA DE IMPULSOS O PWM Son circuitos que proporcionan en su salida impulsos de anchura variable, que se ofrecen al exterior a través de las patitas del encapsulado PUERTAS DE E/S DIGITALES Todos los microcontroladores destinan algunas de sus patitas a soportar líneas de E/S digitales. Por lo general, estas líneas se agrupan de ocho en ocho formando Puertas. Las líneas digitales de las Puertas pueden configurarse como Entrada o como Salida cargando un 1 ó un 0 en el bit correspondiente de un registro destinado a su configuración. 27
28 CAPITULO II MARCO TEORICO CONCEPTUAL PUERTAS DE COMUNICACIÓN Con objeto de dotar al microcontrolador de la posibilidad de comunicarse con otros dispositivos externos, otros buses de microprocesadores, buses de sistemas, buses de redes y poder adaptarlos con otros elementos bajo otras normas y protocolos. Algunos modelos disponen de recursos que permiten directamente esta tarea, entre los que destacan: UART, adaptador de comunicación serie asíncrona. USART, adaptador de comunicación serie síncrona y asíncrona Puerta paralela esclava para poder conectarse con los buses de otros microprocesadores. USB (Universal Serial Bus), que es un moderno bus serie para los PC. Bus I2C, que es un interfaz serie de dos hilos desarrollado por Philips. CAN (Controller Area Network), para permitir la adaptación con redes de conexionado multiplexado desarrollado conjuntamente por Bosch e Intel para el cableado de dispositivos en automóviles. En EE.UU. se usa el J185O HERRAMIENTAS PARA EL DESARROLLO DE APLICACIONES. Uno de los factores que más importancia tiene a la hora de seleccionar un microcontrolador entre todos los demás es el soporte tanto software como hardware de que dispone. Un buen conjunto de herramientas de desarrollo puede ser decisivo en la elección, ya que pueden suponer una ayuda inestimable en el desarrollo del proyecto. Las principales herramientas de ayuda al desarrollo de sistemas basados en microcontroladores son: Desarrollo del software: 28
29 CAPITULO II MARCO TEORICO CONCEPTUAL ENSAMBLADOR. La programación en lenguaje ensamblador puede resultar un tanto ardua para el principiante, pero permite desarrollar programas muy eficientes, ya que otorga al programador el dominio absoluto del sistema. Los fabricantes suelen proporcionar el programa ensamblador de forma gratuita y en cualquier caso siempre se puede encontrar una versión gratuita para los microcontroladores más populares COMPILADOR. La programación en un lenguaje de alto nivel (como el C) permite disminuir el tiempo de desarrollo de un producto. No obstante, si no se programa con cuidado, el código resultante puede ser mucho más ineficiente que el programado en ensamblador. Las versiones más potentes suelen ser muy caras, aunque para los microcontroladores más populares pueden encontrarse versiones demo limitadas e incluso compiladores gratuitos. Depuración: debido a que los microcontroladores van a controlar dispositivos físicos, los desarrolladores necesitan herramientas que les permitan comprobar el buen funcionamiento del microcontrolador cuando es conectado al resto de circuitos SIMULADOR. Son capaces de ejecutar en un PC programas realizados para el microcontrolador. Los simuladores permiten tener un control absoluto sobre la ejecución de un programa, siendo ideales para la depuración de los mismos. Su gran inconveniente es que es difícil simular la entrada y salida de datos del microcontrolador. Tampoco cuentan con los posibles ruidos en las entradas, pero, al menos, permiten el paso físico de la implementación de un modo más seguro y 29
30 CAPITULO II MARCO TEORICO CONCEPTUAL menos costoso, puesto que ahorraremos en grabaciones de chips para la prueba in-situ PLACAS DE EVALUACIÓN. Se trata de pequeños sistemas con un microcontrolador ya montado y que suelen conectarse a un PC desde el que se cargan los programas que se ejecutan en el microcontrolador. Las placas suelen incluir visualizadores LCD, teclados, LEDs, fácil acceso a los pines de E/S, etc. Elsistema operativo de la placa recibe el nombre de programa monitor. El programa monitor de algunas placas de evaluación, aparte de permitir cargar programas y datos en la memoria del microcontrolador, puede permitir en cualquier momento realizar ejecución paso a paso, monitorizar el estado del microcontrolador o modificar los valores almacenados los registros o en la memoria EMULADORES EN CIRCUITO. Se trata de un instrumento que se coloca entre el PC anfitrión y el zócalo de la tarjeta de circuito impreso donde se alojará el microcontrolador definitivo. El programa es ejecutado desde el PC, pero para la tarjeta de aplicación es como si lo hiciese el mismo microcontrolador que luego irá en el zócalo. Presenta en pantalla toda la información tal y como luego sucederá cuando se coloque la cápsula LA FAMILIA DE LOS PIC. Dado que las características de los microcontroladores PIC en su mayoría se agrupan por familias es muy importante para describir el modelo PIC 16C711 dar una idea de las características de su familia o gama. El PIC 16C711 pertenece a la gama media. 30
31 CAPITULO II MARCO TEORICO CONCEPTUAL Los PIC tienen varias cualidades interesantes, puede ser la velocidad, el precio, la facilidad de uso, la información, las herramientas de apoyo.... Quizás un poco de todo eso es lo que produce esa imagen de sencillez y utilidad. Es probable que en un futuro próximo otra familia de microcontroladores le arrebate ese "algo". Queremos constatar que para las aplicaciones más habituales (casi un 90%) la elección de una versión adecuada de PIC es la mejor solución; sin embargo, dado su carácter general, otras familias de microcontroladores son más eficaces en aplicaciones específicas, especialmente si en ellas predomina una característica concreta, que puede estar muy desarrollada en otra familia. Los detalles más importantes y las razones de la excelente acogida que tienen los PIC son los siguientes: Sencillez de manejo: Tienen un juego de instrucciones reducido; 35 en la gama media. Buena información, fácil de conseguir y económica. Precio: Su costo es comparativamente inferior al de sus competidores. Poseen una elevada velocidad de funcionamiento. Buen promedio de parámetros: velocidad, consumo, tamaño, alimentación, código compacto, etc. Herramientas de desarrollo fáciles y baratas. Muchas herramientas software se pueden recoger libremente a través de Internet desde Microchip ( ) Existe una gran variedad de herramientas hardware que permiten grabar, depurar, borrar y comprobar el comportamiento de los PIC. Diseño rápido. La gran variedad de modelos de PIC permite elegir el que mejor responde a los requerimientos de la aplicación. 31
32 CAPITULO II MARCO TEORICO CONCEPTUAL LAS GAMAS DE PIC Una de las labores más importantes del ingeniero de diseño es la elección del microcontrolador que mejor satisfaga las necesidades del proyecto con el mínimo presupuesto. Para resolver aplicaciones sencillas se precisan pocos recursos, en cambio, las aplicaciones grandes requieren numerosos y potentes. Siguiendo esta filosofía Microchip construye diversos modelos de microcontroladores orientados a cubrir, de forma óptima, las necesidades de cada proyecto. Así, hay disponibles microcontroladores sencillos y baratos para atender las aplicaciones simples y otros complejos y más costosos para las de mucha envergadura. Microchip dispone de cuatro familias de microcontroladores de 8 bits para adaptarse a las necesidades de la mayoría de los clientespotenciales. En la mayor parte de la bibliografía encontremos tan solo tres familias de microcontroladores, con lo que habrán despreciado la llamada gama enana, que es en realidad una subfamilia formada por componentes pertenecientes a las otras gamas. En nuestro caso hemos preferido comentarla dado que los PIC enanos son muy apreciados en las aplicaciones de control de personal, en sistemas de seguridad y en dispositivos de bajo consumo que gestionan receptores y transmisores de señales. Su pequeño tamaño los hace ideales en muchos proyectos donde esta cualidad es fundamental. Describiremos brevemente las familias enana, baja y alta y nos concentraremos en la gama media a la cual pertenece el 16C LA GAMA ENANA: PIC12C(F)XXX DE 8 PATITAS Se trata de un grupo de PIC de reciente aparición que ha acaparado la atención del mercado. Su principal característica es su reducido tamaño, al disponer todos sus componentes de 8 patitas. Se alimentan con un voltaje de corriente continua comprendido entre 2,5 V y 5,5 V, y 32

33 CAPITULO II MARCO TEORICO CONCEPTUAL consumen menos de 2 ma cuando trabajan a 5 V y 4 MHz. El formato de sus instrucciones puede ser de 12 o de 14 bits y su repertorio es de 33 o 35 instrucciones, respectivamente. En la Figura se muestra el diagrama de conexionado de uno de estos PIC. Figura 2.5. Diagrama de conexiones de los PIC12Cxxx de la gama enana. Aunque los PIC enanos sólo tienen 8 patitas, pueden destinar hasta 6 como líneas de E/S para los periféricos porque disponen de un oscilador interno R-C. En la Tabla se presentan las principales características de los modelos de esta subfamilia, que el fabricante tiene la intención de potenciar en un futuro próximo. Los modelos 12C5xx pertenecen a la gama baja, siendo el tamaño de las instrucciones de 12 bits; mientras que los 12C6xx son de la gama media y sus instrucciones tienen 14 bits. Los modelos 12F6xx poseen memoria Flash para el programa y EEPROM para los datos. Tabla 1. Características de los modelos PIC12C(F)XXX de la gama enana. 33
34 CAPITULO II MARCO TEORICO CONCEPTUAL GAMA BAJA O BÁSICA: PIC16C5X CON INSTRUCCIONES DE 12 BITS. Se trata de una serie de PIC de recursos limitados, pero con una de la mejores relaciones costo/prestaciones. Sus versiones están encapsuladas con 18 y 28 patitas y pueden alimentarse a partir de una tensión de 2,5 V, lo que les hace ideales en las aplicaciones que funcionan con pilas teniendo en cuenta su bajo consumo (menos de 2 ma a 5 V y 4 MHz). Tienen un repertorio de 33 instrucciones cuyo formato consta de 12 bits. No admiten ningún tipo de interrupción y la Pila sólo dispone de dos niveles. En la Figura se muestra el diagrama de conexionado de uno de estos PIC. Figura 2.6. Diagrama de patitas de los PIC de la gama baja que responden a la nomenclatura PIC16C54/56. Al igual que todos los miembros de la familia PIC16/17, los componentes de la gama baja se caracterizan por poseer los siguientes recursos: (en la Tabla se presentan las principales características de los modelos de esta familia). 1. Sistema POR ("Power On Reset") Todos los PIC tienen la facultad de generar una autoreinicialización o autoreset al conectarles la alimentación. 34
35 CAPITULO II MARCO TEORICO CONCEPTUAL 2. Perro guardián (Watchdog o WDT) Existe un temporizador que produce un reset automáticamente si no es recargado antes que pase un tiempo prefijado. Así se evita que el sistema quede "colgado" dado en esa situación el programa no recarga dicho temporizador y se genera un reset. 3. Código de protección. Cuando se procede a realizar la grabación del programa, puede protegerse para evitar su lectura. También disponen los PIC de posiciones reservadas para registrar números de serie, códigos de identificación, prueba, etc. Tabla 2. Características de los modelos PIC16C 5X de la gama baja 4. Líneas de E/S de alta corriente. Las líneas de E/S de los PIC pueden proporcionar o absorber una corriente de salida comprendida entre 20 y 25 ma, capaz de excitar directamente ciertos periféricos. 5. Modo de reposo (Bajo consumo o "sleep") Ejecutando una instrucción (SLEEP), la CPU y el oscilador principal se detienen y se reduce notablemente el consumo. 35
36 CAPITULO II MARCO TEORICO CONCEPTUAL Para terminar el comentario introductorio sobre los componentes de la gama baja conviene nombrar dos restricciones importantes: La pila o "stack" sólo dispone de dos niveles lo que supone no poder encadenar más de dos subrutinas. Los microcontroladores de la gama baja no admiten interrupciones GAMA MEDIA. PIC16CXXX CON INSTRUCCIONES DE 14 BITS Es la gama más variada y completa de los PIC. Abarca modelos con encapsulado desde 18 patitas hasta 68, cubriendo varias opciones que integran abundantes periféricos. Dentro de esta gama se halla el «fabuloso PIC16X84» y sus variantes. En la Figura se muestra el diagrama de conexionado de uno de estos PIC. Figura 2.7. Diagrama de patitas del PIC16F877, uno de los modelos más representativos de la gama media. 36

37 CAPITULO II MARCO TEORICO CONCEPTUAL En esta gama sus componentes añaden nuevas prestaciones a las que poseían los de la gama baja, haciéndoles más adecuados en las aplicaciones complejas. Admiten interrupciones, poseen comparadores de magnitudes analógicas, convertidores A/D, puertos serie y diversos temporizadores. El repertorio de instrucciones es de 35, de 14 bits cada una y compatible con el de la gama baja. Sus distintos modelos contienen todos los recursos que se precisan en las aplicaciones de los microcontroladores de 8 bits. También dispone de interrupciones y una Pila de 8 niveles que permite el anidamiento de subrutinas. En la Tabla se presentan las principales características de los modelos de esta familia. Tabla 3. Características relevantes de los modelos PIC16X8X de la gama media. Encuadrado en la gama media también se halla la versión PIC14C000, que soporta el diseño de controladores inteligentes para cargadores de baterías, pilas pequeñas, fuentes de alimentación ininterrumpibles y cualquier sistema de adquisición y procesamiento de señales que requiera gestión de la energía de alimentación. Los PIC 14C000 admiten cualquier tecnología de las baterías como Li-Ion, NiMH, NiCd, Ph y Zinc. El temporizador TMR1 que hay en esta gama tiene un circuito oscilador que puede trabajar asíncronamente y que puede incrementarse aunque el microcontrolador se halle en el modo de reposo ("sleep"), posibilitando la implementación de un reloj en tiempo real. 37
38 CAPITULO II MARCO TEORICO CONCEPTUAL Las líneas de E/S presentan una carga "pull-up" activada por software GAMA ALTA: PIC17CXXX CON INSTRUCCIONES DE 16 BITS. Se alcanzan las 58 instrucciones de 16 bits en el repertorio y sus modelos disponen de un sistema de gestión de interrupciones vectorizadas muy potente. También incluyen variados controladores de periféricos, puertas de comunicación serie y paralelo con elementos externos, un multiplicador hardware de gran velocidad y mayores capacidades de memoria, que alcanza los 8 k palabras en la memoria de instrucciones y 454 bytes en la memoria de datos. Quizás la característica más destacable de los componentes de esta gama es su arquitectura abierta, que consiste en la posibilidad de ampliación del microcontrolador con elementos externos. Para este fin, las patitas sacan al exterior las líneas de los buses de datos, direcciones y control, a las que se conectan memorias o controladores de periféricos. Esta facultad obliga a estos componentes a tener un elevado número de patitas comprendido entre 40 y 44. Esta filosofía de construcción del sistema es la que se empleaba en los microprocesadores y no suele ser una práctica habitual cuando se emplean microcontroladores. En la tabla se muestran las características más relevantes de los modelos de esta gama, que sólo se utilizan en aplicaciones muy especiales con grandes requerimientos. Tabla 4. Características más destacadas de los modelos PIC17CXXX de la gama alta. 38
39 CAPITULO II MARCO TEORICO CONCEPTUAL 2.2 SENSORES Un sensor es un dispositivo capaz de detectar magnitudes físicas o químicas, llamadas variables de instrumentación, y transformarlas en variables eléctricas. Las variables de instrumentación pueden ser por ejemplo: temperatura, intensidad lumínica, distancia, aceleración, inclinación, desplazamiento, presión, fuerza, torsión, humedad, ph, etc. Una magnitud eléctrica puede ser una resistencia eléctrica (como en una RTD), una capacidad eléctrica (como en un sensor de humedad), unatensión eléctrica (como en un termopar), una corriente eléctrica (como en un fototransistor), etc. Un sensor se diferencia de un transductor en que el sensor está siempre en contacto con la variable de instrumentación con lo que Puede decirse también que es un dispositivo que aprovecha una de sus propiedades con el fin de adaptar la señal que mide para que la pueda interpretar otro dispositivo. Como por ejemplo el termómetrode mercurio que aprovecha la propiedad que posee el mercurio de dilatarse o contraerse por la acción de la temperatura. Un sensor también puede decirse que es un dispositivo que convierte una forma de energía en otra. Áreas de aplicación de los sensores: Industria automotriz, Industria aeroespacial, Medicina, Industria de manufactura, Robótica, etc. Los sensores pueden estar conectados a un computador para obtener ventajas como son el acceso a una base de datos, la toma de valores desde el sensor, etc CARACTERÍSTICAS DE LOS SENSORES Entre las características técnicas de un sensor destacan las siguientes: Rango de medida: dominio en la magnitud medida en el que puede aplicarse el sensor. Precisión: es el error de medida máximo esperado. Offset o desviación de cero: valor de la variable de salida cuando la variable de entrada es nula. Si el rango de medida no llega a valores nulos de la variable de entrada, habitualmente se establece otro punto de referencia para definir el offset. Linealidad o correlación lineal. 39
40 CAPITULO II MARCO TEORICO CONCEPTUAL Sensibilidad de un sensor: relación entre la variación de la magnitud de salida y la variación de la magnitud de entrada. Resolución: mínima variación de la magnitud de entrada que puede apreciarse a la salida. Rapidez de respuesta: puede ser un tiempo fijo o depender de cuánto varíe la magnitud a medir. Depende de la capacidad del sistema para seguir las variaciones de la magnitud de entrada. Derivas: son otras magnitudes, aparte de la medida como magnitud de entrada, que influyen en la variable de salida. Por ejemplo, pueden ser condiciones ambientales, como la humedad, la temperatura u otras como el envejecimiento (oxidación, desgaste, etc.) del sensor. Repetitividad: error esperado al repetir varias veces la misma medida. Un sensor es un tipo de transductor que transforma la magnitud que se quiere medir o controlar, en otra, que facilita su medida. Pueden ser de indicación directa (e.g. un termómetro de mercurio) o pueden estar conectados a un indicador (posiblemente a través de un convertidor analógico a digital, un computador y un display) de modo que los valores detectados puedan ser leídos por un humano. Por lo general, la señal de salida de estos sensores no es apta para su lectura directa y a veces tampoco para su procesado, por lo que se usa un circuito de acondicionamiento, como por ejemplo un puente de Wheatstone, amplificadores y filtros electrónicos que adaptan la señal a los niveles apropiados para el resto de la circuitería RESOLUCIÓN Y PRECISIÓN La resolución de un sensor es el menor cambio en la magnitud de entrada que se aprecia en la magnitud de salida. Sin embargo, la precisión es el máximo error esperado en la medida. La resolución puede ser de menor valor que la precisión. Por ejemplo, si al medir una distancia la resolución es de 0,01 mm, pero la precisión es de 1 mm, entonces pueden apreciarse variaciones en la distancia medida de 0,01 mm, pero no puede asegurarse que haya un error de medición 40
41 CAPITULO II MARCO TEORICO CONCEPTUAL menor a 1 mm. En la mayoría de los casos este exceso de resolución conlleva a un exceso innecesario en el coste del sistema. No obstante, en estos sistemas, si el error en la medida sigue una distribución normal o similar, lo cual es frecuente en errores accidentales, es decir, no sistemáticos, la repetitividad podría ser de un valor inferior a la precisión. Sin embargo, la precisión no puede ser de un valor inferior a la resolución, pues no puede asegurarse que el error en la medida sea menor a la mínima variación en la magnitud de entrada que puede observarse en la magnitud de salida PROTOCOLOS DE COMUNICACIÓN RS485 3 Cuando se necesita transmitir a largas distancias o con más altas velocidades que RS-232, RS-485 es la solución. Utilizando enlaces con RS-485 no hay limitación a conectar tan solo dos dispositivos. RS-485 o también conocido como EIA-485, que lleva el nombre del comité que lo convirtió en estándar en Es un estándar de comunicaciones en bus de la capa física del Modelo OSI. Está definido como un sistema en bus de transmisión multipunto diferencial, es ideal para transmitir a altas velocidades sobre largas distancias (35 Mbps hasta 10 metros y 100 Kbps en metros) y a través de canales ruidosos, ya que reduce los ruidos que aparecen en los voltajes producidos en la línea de transmisión. El medio físico de transmisión es un par entrelazado que admite hasta 32 estaciones en 1 solo hilo, con una longitud máxima de metros operando entre 300 y bps y la comunicación half-duplex (semiduplex). Soporta 32 transmisiones y 32 receptores. La transmisión diferencial permite múltiples drivers dando la posibilidad de una configuración multipunto. Al tratarse de un estándar bastante abierto permite muchas y muy diferentes configuraciones y utilizaciones. 3 Ingeniería en Microcontroladores, Protocolo RS
42 CAPITULO II MARCO TEORICO CONCEPTUAL Desde el 2003 está siendo administrado por la Telecommunications Industry Association (TIA) y titulado como TIA-485-A.222 La razón por la que RS-485 puede transmitir a largas distancias, es porque utiliza el balanceo de líneas. Cada señal tiene dedicados un par de cables, sobre uno de ellos se encontrará un voltaje y en el otro se estará su complemento, de esta forma, el receptor responde a la diferencia entre voltajes. La ventaja de las líneas balanceadas es su inmunidad al ruido En cuanto a las líneas balanceadas la TIA/EIA-485 designa a estas dos líneas como A y B. En el controlador TX, una entrada alta TTL causa que la línea A sea más positiva (+) que la línea B, mientras que un bajo en lógica TTL causa que la línea B sea más positiva (+) que la línea A. Por otra parte en el controlador de recepción RX, si la entrada A es más positiva que la entrada B, la salida lógica TTL será 1 y si la entrada B es más (+) que la entrada A, la salida lógica TTL será un 0. 42
43 CAPITULO II MARCO TEORICO CONCEPTUAL Figura 2.8. Comunicación RS485-Modo Half Duplex PRINCIPALES CARACTERISTICAS Interfaz diferencial Conexión multipunto Alimentación única de +5V Hasta 32 estaciones (ya existen interfaces que permiten conectar 256 estaciones) Velocidad máxima de 10 Mbps (a 12 metros) Longitud máxima de alcance de metros (a 100 Kbps) Rango de bus de -7V a +12V APLICACIONES RS-485 se usa con frecuencia en las UARTs para comunicaciones de datos de poca velocidad en las cabinas de los aviones. Por 43
44 CAPITULO II MARCO TEORICO CONCEPTUAL ejemplo, algunas unidades de control del pasajero lo utilizan. Requiere el cableado mínimo, y puede compartir el cableado entre varios asientos. Por lo tanto reduce el peso del sistema. RS-485 se utiliza en sistemas grandes de sonido, como los conciertos de música y las producciones de teatro, se usa software especial para controlar remotamente el equipo de sonido de una computadora, es utilizado generalmente para los micrófonos. RS-485 también se utiliza en la automatización de los edificios pues el cableado simple del bus y la longitud de cable es larga por lo que son ideales para ensamblar los dispositivos que se encuentran alejados. 2.3 COMUNICACIÓN RS232 RS232 (Recommended Standard 232, también conocido como Electronic Industries Alliance RS-232C) es una interfaz que designa una norma para el intercambio serie de datos binarios entre un DTE (Equipoterminal de datos) y un DCE (Data Communication Equipment, Equipo de Comunicación de datos), aunque existen otras en las que también se utiliza la interfaz RS-232. Figura 2.9. Conector DB9 para comunicación serial 44
45 CAPITULO II MARCO TEORICO CONCEPTUAL CONECTOR RS-232 (DB-9 HEMBRA). En particular, existen ocasiones en que interesa conectar otro tipo de equipamientos, como pueden ser computadores. Evidentemente, en el caso de interconexión entre los mismos, se requerirá la conexión de un DTE (Data Terminal Equipment) con otro DTE. Para ello se utiliza una conexión entre los dos DTE sin usar módem, por ello se llama: null módem ó módem nulo. El RS-232 consiste en un conector tipo DB-25 (de 25 pines), aunque es normal encontrar la versión de 9 pines (DB-9), más barato e incluso más extendido para cierto tipo de periféricos (como el ratón serie del PC) CONSTRUCCIÓN FISICA La interfaz RS-232 está diseñada para imprimir documentos para distancias cortas, de hasta 15 metros según la norma, y para velocidades de comunicación bajas, de no más de 20 Kilobits/segundo. A pesar de esto, muchas veces se utiliza a mayores velocidades con un resultado aceptable. La interfaz puede trabajar en comunicación asíncrona o síncrona y tipos de canal simplex, half duplex o full duplex. En un canalsimplex los datos siempre viajarán en una dirección, por ejemplo desde DCE a DTE. En un canal half duplex, los datos pueden viajar en una u otra dirección, pero sólo durante un determinado periodo de tiempo; luego la línea debe ser conmutada antes que los datos puedan viajar en la otra dirección. En un canal full duplex, los datos pueden viajar en ambos sentidos simultáneamente. Las líneas de handshakingde la RS-232 se usan para resolver los problemas asociados con este modo de operación, tal como en qué dirección los datos deben viajar en un instante determinado. Si un dispositivo de los que están conectados a una interfaz RS-232 procesa los datos a una velocidad menor de la que los recibe deben de conectarse las líneas handshaking que permiten realizar un control de 45
46 CAPITULO II MARCO TEORICO CONCEPTUAL flujo tal que al dispositivo más lento le de tiempo de procesar la información. Las líneas de "hand shaking" que permiten hacer este control de flujo son las líneas RTS y CTS. Los diseñadores del estándar no concibieron estas líneas para que funcionen de este modo, pero dada su utilidad en cada interfaz posterior se incluye este modo de uso Las UART o U(S)ART (Transmisor y Receptor Síncrono Asíncrono Universal) se diseñaron para convertir las señales que maneja la CPU y transmitirlas al exterior. Las UART deben resolver problemas tales como la conversión de voltajes internos del DCE con respecto al DTE, gobernar las señales de control, y realizar la transformación desde el bus de datos de señales en paralelo a serie y viceversa. Debe ser robusta y deberá tolerar circuitos abiertos, cortocircuitos y escritura simultánea sobre un mismo pin, entre otras consideraciones. Es en la UART en donde se implementa la interfaz. Generalmente cuando se requiere conectar un microcontrolador (con señales típicamente entre 3.3 y 5 V) con un puerto RS-232 estándar se utiliza un driver de línea, típicamente un MAX232 o compatible, el cual mediante dobladores de voltaje positivos y negativos permite obtener la señal bipolar (típicamente alrededor de +/- 6V) requerida por el estándar. Para los propósitos de la RS-232 estándar, una conexión es definida por un cable desde un dispositivo al otro. Hay 25 conexiones en la especificación completa, pero es muy probable que se encuentren menos de la mitad de éstas en una interfaz determinada. La causa es simple, una interfaz full duplex puede obtenerse con solamente 3 cables. Existe una cierta confusión asociada a los nombres de las señales utilizadas, principalmente porque hay tres convenios diferentes de denominación (nombre común, nombre asignado por la EIA, y nombre asignado por el CCITT). En la siguiente tabla se muestran los tres nombres junto al número de pin del conector al que está asignado (los nombres de señal están desde el 46
47 CAPITULO II MARCO TEORICO CONCEPTUAL punto de vista del DTE (por ejemplo para Transmit Data los datos son enviados por el DTE, pero recibidos por el DCE): Propósito de cada una de las Patas del Conector DB9 # Propósito 1 Tierra de chasis 2 Recibe los datos (RD) 3 Transmite los datos (TD) 4 Terminal de Datos esta Listo (DTR) 5 Tierra de señal 6 Conjunto de Datos esta Listo (DSR) 7 Solicita Permiso para Enviar Datos (RTS) 8 Pista Libre para Enviar Datos (CTS) 9 Timbre Telefónico (RI) Tabla 5. PINES DE CONEXIÓN DEL PUERTO DB9 Sobre los circuitos, todos los voltajes están con respecto a la señal de tierra. Las convenciones que se usan son las siguientes: Voltaje Señal Nivel Lógico Control +3 a +15 Espacio 0 On -3 a 15 Marca 1 Off Tabla 6.Convenciones de valores lógicos en la comunicación RS232 47
48 CAPITULO II MARCO TEORICO CONCEPTUAL Los valores de voltaje se invierte con respecto a los valores lógicos. Por ejemplo, el valor lógico positivo corresponde al voltaje negativo. También un 0 lógico corresponde a la señal de valor verdadero ó activada. Por ejemplo si la línea DTR está al valor 0 lógico, se encuentra en la gama de voltaje que va desde +3 a +15 V, entonces DTR está listo (ready). El canal secundario a veces se usa para proveer un camino de retorno de información más lento, de unos 5 a 10 bits por segundo, para funciones como el envío de caracteres ACK o NAK, en principio sobre un canal half duplex. Si el módem usado acepta esta característica, es posible para el receptor aceptar o rechazar un mensaje sin tener que esperar el tiempo de conmutación, un proceso que usualmente toma entre 100 y 200 milisegundos CARACTERÍSTICAS ELÉCTRICAS DE CADA CIRCUITO Los siguientes criterios son los que se aplican a las características eléctricas de cada una de las líneas: 1. La magnitud de un voltaje en circuito abierto no excederá los 25 V. 2. El conductor será apto para soportar un corto con cualquier otra línea en el cable sin daño a sí mismo o a otro equipamiento, y la corriente de cortocircuito no excederá los 0,5 A. 3. Las señales se considerarán en el estado de MARCA, (nivel lógico 1 ), cuando el voltaje sea más negativo que - 3 V con respecto a la línea de Signal Ground. Las señales se considerarán en el estado de ESPACIO, (nivel lógico 0 ), cuando el voltaje sea más positivo que +3 V con respecto a la línea Signal Ground. La gama de voltajes entre -3 V y +3 V se define como la región de transición, donde la condición de señal no está definida. 4. La impedancia de carga tendrá una resistencia a DC de menos de 7000 Ω al medir con un voltaje aplicado de entre 3 a 25 V pero 48
49 CAPITULO II MARCO TEORICO CONCEPTUAL mayor de 3000 O cuando se mida con un voltaje de menos de 25 V. 5. Cuando la resistencia de carga del terminal encuentra los requerimientos de la regla 4 anteriormente dicha, y el voltaje del terminal de circuito abierto está a 0 V, la magnitud del potencial de ese circuito con respecto a Signal Ground estará en el rango de 5 a 15 V. 6. El driver de la interfaz mantendrá un voltaje entre -5 a 15 V relativos a la Signal Ground para representar una condición de MARCA. El mismo driver mantendrá un voltaje de entre 5 V a 15 V relativos a Signal Ground para simbolizar una señal de ESPACIO. Obsérvese que esta regla junto con la Regla 3, permite 2 V de margen de ruido. En la práctica, se utilizan 12 y 12 V respectivamente. 7. El driver cambiará el voltaje de salida hasta que no se excedan 30 V/µs, pero el tiempo requerido a la señal para pasar de 3 V a +3 V de la región de transición no podrá exceder 1 ms, o el 4% del tiempo de un bit. 8. La desviación de capacitancia del terminal no excederá los 2500 pf, incluyendo la capacitancia del cable. Obsérvese que cuando se está usando un cable normal con una capacitancia de 40 a 50 pf/pie de longitud, esto limita la longitud de cable a un máximo de 50 Pies, (15 m). Una capacitancia del cable inferior permitiría recorridos de cable más largos. 9. La impedancia del driver del circuito estando apagado deberá ser mayor que 300 Ω. 2.4 CELULARES El teléfono móvil es un dispositivo inalámbrico electrónico que permite tener acceso a la red de telefonía celular o móvil. Se 49
50 CAPITULO II MARCO TEORICO CONCEPTUAL denomina celular en la mayoría de países latinoamericanos debido a las antenas repetidoras que conforman la red, cada una de las cuales es una célula, si bien existen redes telefónicas móviles satelitales. Su principal característica es su portabilidad, que permite comunicarse desde casi cualquier lugar. Aunque su principal función es la comunicación de voz, como el teléfono convencional. A partir del siglo XXI, los teléfonos móviles han adquirido funcionalidades que van mucho más allá que limitarse a llamar o enviar mensajes de texto, se podría decir que se ha unificado (que no sustituido) con distintos dispositivos tales como PDA, cámara de fotos, agenda electrónica, reloj despertador, calculadora, microproyector, GPSo reproductor multimedia, así como poder realizar multitud de acciones en un dispositivo pequeño y portátil que lleva prácticamente todo el mundo de países desarrollados. A este tipo de evolución del teléfono móvil se le conoce como smartphone. El primer antecedente respecto al teléfono móvil es de la compañía Motorola, con su modelo DynaTAC 8000X. El modelo fue diseñado por el ingeniero de Motorola Rudy Krolopp en El modelo pesaba poco menos de un kilo y tenía un valor de casi 4000 dólares estadounidenses. Krolopp se incorporaría posteriormente al equipo de investigación y desarrollo de Motorola liderado por Martin Cooper. Tanto Cooper como Krolopp aparecen como propietarios de la patente original. A partir del DynaTAC 8000X, Motorola desarrollaría nuevos modelos como el Motorola MicroTAC, lanzado en 1989, y el Motorola StarTAC, lanzado en 1996 al mercado. En la actualidad tienen gran importancia los teléfonos móviles táctiles, que siguen la estela del iphone FUNCIONAMIENTO La comunicación telefónica es posible gracias a la interconexión entre centrales móviles y públicas. 50
51 CAPITULO II MARCO TEORICO CONCEPTUAL Según las bandas o frecuencias en las que opera el móvil, podrá funcionar en una parte u otra del mundo. La telefonía móvil consiste en la combinación de una red de estaciones transmisoras-receptoras de radio (repetidores, estaciones base o BTS) y una serie de centrales telefónicas de conmutación de 1er y 5º nivel (MSC y BSC respectivamente), que posibilita la comunicación entre terminales telefónicos portátiles (teléfonos móviles) o entre terminales portátiles y teléfonos de la red fija tradicional. En su operación el teléfono móvil establece comunicación con una estación base, y a medida que se traslada, los sistemas computacionales que administran la red van cambiando la llamada a la siguiente estación base, en forma transparente para el usuario. Es por eso que se dice que las estaciones base forman una red de celdas, cual panal de abeja, sirviendo cada estación base a los equipos móviles que se encuentran en su celda EVOLUCIÓN Y CONVERGENCIA TECNOLÓGICA La evolución del teléfono móvil ha permitido disminuir su tamaño y peso, desde el Motorola DynaTAC, el primer teléfono móvil en 1983 que pesaba 800 gramos, a los actuales más compactos y con mayores prestaciones de servicio. El desarrollo de baterías más pequeñas y de mayor duración, pantallas más nítidas y de colores, la incorporación de software más amigable, hacen del teléfono móvil un elemento muy apreciado en la vida moderna. El avance de la tecnología ha hecho que estos aparatos incorporen funciones que no hace mucho parecían futuristas, como juegos, reproducción de música MP3 y otros formatos, correo electrónico, SMS, agenda electrónica PDA,fotografía digital y video digital, videollamada, navegación por Internet, GPS, y hasta Televisión digital. Las compañías de telefonía móvil ya están pensando nuevas aplicaciones para este 51
52 CAPITULO II MARCO TEORICO CONCEPTUAL pequeño aparato que nos acompaña a todas partes. Algunas de esas ideas son: medio de pago, localizador e identificador de personas COMANDOS AT El control del módem GSM del celular a través del microcontrolador se basa en el uso de comandos denominados Hayes o AT, de los que exponemos brevemente algunas referencias. Hayes es el nombre de una empresa que en los orígenes de la comunicación por módem definió una serie de comandos u órdenes para que el software de comunicaciones pudiera comunicarse con el módem, pudiendo controlar éste último. Estos comandos tuvieron tanto éxito que se convirtieron en el virtual estándar de comunicaciones, y los módem que los comprenden (la mayoría de los módem modernos) se denominan compatibles Hayes. Todos los comandos de este protocolo comienzan por AT y acaban por el carácter <CR> (ASCII 13) (aunque éste último carácter es configurable) COMANDOS UTILIZADOS CONFIGURACIÓN TIPO SMS: El comando AT+CMGF configura el tipo de SMS que se va a manejar. Hay dos opciones, modo TEXT y modo PDU. El modo PDU codifica el mensaje recibido, creando una trama ilegible directamente. Por ello, para facilitar la tarea, lo configuramos en TEXT MODE. Se envía "AT+CMGF=1", modo TEXTO. modo = 1 indica formato de mensajes en 52
53 CAPITULO II MARCO TEORICO CONCEPTUAL CONFIGURACIÓN AVISO SMS. Para que el módem envíe un mensaje cuando reciba un nuevo SMS, debemos configurarlo con el comando "AT+CNMI=1,2,0,0,0", donde 1,2 es el valor que permite la recepción de un SMS sin almacenarlo en la Bandeja de entrada y enviarlo al puerto de transmisión del celular, los tres 0 corresponden a funciones que no vamos a manejar LECTURA DEL NÚMERO DEL CENTRO DE MENSAJES. El comando AT+CSCA solicita al módem el número de teléfono del centro de mensajes. Responde con la siguiente trama: "AT+CSCA=",34," ",34,13. El centro de mensajes de la operadora CLARO es " " ENVÍO DE MENSAJES. Para el envío de mensajes SMS el procedimiento a seguir es algo más complejo. El comando a usar es AT+CMGS. Enviamos: "AT+CMGS=",34," ",34,13; donde " " es el número de teléfono móvil destinatario. 2.5 SERVICIO DE MENSAJES CORTOS - SMS El servicio de mensajes cortos SMS (Short Message Service) permite enviar o recibir mensajes breves de texto (máximo de 160 caracteres), desde un teléfono GSM o Centro de Información a otro teléfono GSM. Los mensajes serán visualizados directamente en la pantalla de teléfono. Al recibir el mensaje, además del texto, se obtiene una serie de datos como es el remitente, la hora y la fecha de recepción. 53
54 CAPITULO II MARCO TEORICO CONCEPTUAL Para el envío de un SMS, es necesario que el dispositivo GSM tenga configurado el número telefónico del Centro de Mensajes propio del operador. Se deberá redactar el texto a enviar y finalmente se deberá introducir el número telefónico del destinario. Una vez enviado, el SMS es trasmitido desde la red hacia el teléfono destino. Si éste permanece apagado o fuera de cobertura, la red reintentará enviar el mensaje durante 48 horas, superadas las cuales el mensaje ya no se entregará. En ocasiones el mensaje enviado no es recibido por el destinatario debido a que su buzón de entrada se encuentra saturado, por eso es importante controlar que no se llene el buzón del teléfono. 54
55 CAPITULO III METODOLOGÍA CAPITULO III METODOLOGÍA 55
56 CAPITULO III METODOLOGÍA En el presente capítulo se presenta la metodología empleada en este trabajo y se presenta el sistema de adquisición, como son los sensores, la parte del diseño del hardware y software. Como se puede observar la siguiente figura, el Sistema consta de una central, formada por un pic16f877, que tiene comunicación RS232 con un celular para enviar los mensajes de alarma, una PC para monitorear el sistema de alarmas, los módulos formados por un pic16f84, con sus respectivas alarmas y el BUS de comunicación RS485, que permite a cada módulo, enviar información de los sensores. Figura 3.1. GRAFICO RESUMEN DEL BUS PRINCIPAL Y SUS ESTACIONES CON LOS SENSORES 3.1 SISTEMA DE SENSORES Los sensores que se pueden agregar, depende de las necesidades de cada pabellón. 56


57 CAPITULO III METODOLOGÍA DETECTORES DE MOVIMIENTO (PIR) Son sensores que detectan cambios de temperatura y movimiento. Si estos sensores detectan movimiento estando el sistema conectado, dispararán la alarma. Existen detectores regulados para no detectar mascotas, tales como perros y gatos. Figura 3.2. Sensor Detector de Movimiento Este sensor se ha escogido por ser el mas sencillo 4, cuenta solamente con 3 terminales, dos de ellos se utilizan para la alimentación y la restante para la salida de detección. Su voltaje de alimentación de +5V, Rango de medición, hasta 6m., Salida TTL, es decir +5V. Figura 3.3. Conexión del PIR al microcontrolador
58 CAPITULO III METODOLOGÍA DETECTORES MAGNÉTICOS Se trata de un sensor que forma un circuito cerrado por un iman y un contacto muy sensible que al separarse, cambia el estado (se puede programar como NC o NA) provocando un salto de alarma. Se utiliza en puertas y ventanas, colocando una parte del sensor en el marco y otra en la puerta o ventana misma. Figura 3.4. Sensor Detector magnético Se escogió este tipo de sensor por su sencillez y precio. Este tipo de sensor no necesita alimentación. Tiene 2 cables de contacto que van al pic DETECTORES DE ROTURA DE CRISTALES Son detectores microfónicos, activados al detectar la frecuencia aguda del sonido de una rotura de cristal. 58
59 CAPITULO III METODOLOGÍA Figura 3.5. Sensor Detector de rotura de cristales Este Detector microfónico de rotura de cristales Acuity, tiene Micrófono omnidireccional de gran rango de Frecuencias, con excelente captación de sonidos débiles a gran distancia (hasta 12m). Jumper deselección del nivel de sensibilidad y tipo de cristal (sencillo, templado, alambrado y laminado). Protegido contra interferencias estáticas, su procesamiento digital de la señal hace que este detector sea inmune a las falsas alarmas BARRERAS INFRARROJAS Son de haz simple de 30 metros de alcance en exteriores, o 60 metros de alcance en interiores. La alarma se produce cuando se cortan los haces de luz. El doble haz contribuye a la estabilidad del sistema y la inmunidad contra falsas alarmas. El transmisor y el receptor cuentan con lentes concentradoras de la luz infrarroja, estos elementos pueden ser rotado hasta 180 grados dentro de su gabinete plástico, esto permite que sean instaldos tanto enfrentados como en paralelo. Las unidades cuentan con sistema antidesarme. 59
60 CAPITULO III METODOLOGÍA Figura 3.6. Sensor Barrera infrarroja 5 Estos sensores son los PH30-SA - Interstellar, se escogieron por su simple haz SIRENA DE ALARMA El elemento de alarma está formado generalmente por una sirena (o campana) que advierte de la ocurencia de una intrusión detectada por el sistema, mediante una señal sonora de alto nivel. En algunos casos, también puede incluir algún tipo de señalización visual, como balizas y destelladores (flash), para aquellas personas que tienen problemas de audición o cuando existe un alto nivel de ruido ambiente. La sirena exterior se coloca dentro de un gabinete para su protección, y se instala en la fachada de la casa, comercio o industria a proteger. Además de su función de alertar en los casos en que se ha detectado un intruso, la sirena exterior es un elemento disuasivo de por sí, ya que advierte de la existencia de un sistema de alarma instalado en el domicilio. Por otro lado, la sirena interior sirve para actuar como auxiliar de la exterior, de manera que las dos sirenas suenen al mismo tiempo. Si el intruso destruye la sirena exterior, queda funcionando la sirena interior dentro del
61 CAPITULO III METODOLOGÍA lugar a proteger. En todos los casos, estas sirenas emiten un sonido de unos 120 decibeles. Figura 3.7. Sirena de alarma 3.2 ELECCION DEL MICROCONTROLADOR Los microcontroladores son circuitos integrados que incluyen como mínimo una CPU, unidades E/S y memoria de programa, además de una serie de componentes que dotan al microcontrolador de diversas funcionalidades. De los microcontroladores existentes, son con los PIC de las series 16F84A y 16F877A con los que estamos familiarizados. Por lo tanto, siendo los PIC los microcontroladores suficientes para la tarea que vamos a llevar a cabo, se optó por utilizar uno pequeño y versátil por lo que se seleccionó el PIC16F84A y PIC16F877. Del 100% de memoria, se utiliza el 40% para alamcenar el programa PRINCIPALES CARACTERÍSTICAS DEL PIC16F84: - Su procesador es tipo RISC. 61
62 CAPITULO III METODOLOGÍA - Tiene una arquitectura HARVARD. - Todas las instrucciones tienen la misma longitud (14 bits) - Tiene una memoria de programa tipo FLASH de 1024 palabras de 14 bits. - Memoria RAM de 68 bytes. - Memoria EEPROM de 1K x 14bits. - Velocidad de operación de hasta 20Mhz. - Oscilador externo. - Posee 13 pines E/S (pines de entrada o salida) Diagrama de pines del PIC16F84: Figura 3.8. Circuito Integrado Pic16F84 PIN IDENTIFICACION DESCRIPCION DEL PIN 1 RA2 PIN DE ENTRADA/SALIDA (I/O) DEL PUERTO A 2 RA3 PIN DE ENTRADA/SALIDA (I/O) DEL PUERTO A 3 RA4/TOCKI PIN DE ENTRADA/SALIDA (I/O) DEL PUERTO A 4 MCLR RESET Y ENTRADA DE VOLTAJE DE PROGRAMACION 5 VSS PIN DE ALIMEMNTCION A TIERRA(GND) 6 RB0/INT PIN DE ENTRADA/SALIDA (I/O) DEL PUERTO B 62
63 CAPITULO III METODOLOGÍA 7 RB1 PIN DE ENTRADA/SALIDA (I/O) DEL PUERTO B 8 RB2 PIN DE ENTRADA/SALIDA (I/O) DEL PUERTO B 9 RB3 PIN DE ENTRADA/SALIDA (I/O) DEL PUERTO B 10 RB4 PIN DE ENTRADA/SALIDA (I/O) DEL PUERTO B 11 RB5 PIN DE ENTRADA/SALIDA (I/O) DEL PUERTO B 12 RB6 PIN DE ENTRADA/SALIDA (I/O) DEL PUERTO B 13 RB7 PIN DE ENTRADA/SALIDA (I/O) DEL PUERTO B 14 VDD PIN DE ALIMENTACION DE 5VDC 15 OSC2/CLKOUT SALIDA DEL OSCILADOR A CRISTAL 16 OSC1/CLKIN ENTRADA DEL OSCILADOR A CRISTAL O FUENTE EXTERNA DE RELOJ 17 RA0 PIN DE ENTRADA/SALIDA (I/O) DEL PUERTO A 18 RA1 PIN DE ENTRADA/SALIDA (I/O) DEL PUERTO A Tabla 7. Descripción de pines del pic16f84 El microcontrolador PIC16F84 cuenta con dos puertos E/S, el puerto A, el cual consta de cinco pines E/S y el puerto B, el cual consta de ocho pines E/S como se puede observar en la figura. Figura 3.9. Puertos del pic16f84 En total se cuenta con trece pines de E/S, los cuales pueden ser programados como entrada o salida según convenga al momento de diseñar un circuito de control. 63
64 CAPITULO III METODOLOGÍA Los pines correspondientes al oscilador (OSC1 y OSC2) y al reset (MCLR) deben ser siempre tomados en cuenta en el diseño de nuestros proyectos PRINCIPALES CARACTERÍSTICAS DEL PIC16F877 CPU RISC de alta performance Set de35 instrucciones Todas las instrucciones son de un ciclo salvo aquellas que incluyen saltos que son de 2 ciclos. Velocidad de Trabajo: DC - 20 MHz clock input DC ns ciclo de instrucción Hasta 8K x 14 words de FLASH Program Memory, Hasta 368 x 8 bytes de Data Memory (RAM) Hasta 256 x 8 bytes de EEPROM Data Memory Manejo de Interrupciones (hasta 14 fuentes) Stack de hardware de 8 niveles Modo de direccionamiento directo, indirecto y relativo. Power-on Reset (POR) Power-up Timer (PWRT) y Oscillator Startup Timer (OST) Watchdog Timer (WDT) con el reloj RC interno para mejor seguridad. Protección de código programable. Programación serial via 2 pines, In-Circuit Serial Programming (ICSP) In-Circuit Debugging via 2 pines Amplio rango de voltaje de trabajo: 2.0V a 5.5V 64
65 CAPITULO III METODOLOGÍA Figura Circuito Integrado Pic16F DISEÑO DEL HARDWARE DESCRIPCION DEL PUERTO DE COMUNICACIÓN Y CABLES DE CONEXIÓN DEL CELULAR Para la comunicación entre el celular y el PIC se requiere de tres hilos; Rx, TX, GND. En el puerto de comunicación del teléfono estos corresponden a los pines 6, 7 y 2 respectivamente. Para la conexión se hace uso del cable de datos correspondiente al NOKIA 3220 que es el DKU-5. El extremo donde está el conector USB se cortó para llegar identificar los pines 6, 7, 2. En la figura se ilustra el puerto de comunicación del celular con la numeración de los pines a utilizar. 65
66 CAPITULO III METODOLOGÍA Figura Puerto de comunicación del NOKIA Figura CableKU-5 7 En la figura se muestra la utilización del cable DKU-5 para la conexión del celular con el PIC16F84, con los respectivos pines de conexión. Vale la pena mencionar que para la conexión de los terminales se debe cruzar la conexión, esto quiere decir que el Tx del NOKIA se debe conectar con el Rx del PIC y viceversa. 6 Fuente: 7 Fuente: 66
67 CAPITULO III METODOLOGÍA Figura Conexión del NOKIA 3220 y PIC16F84 con el cable DKU-5. En el cable DKU-5 se identificó los conectores de Tx, Rx, GND los cuales corresponden a los siguientes colores: Tx - NARANJA Rx - BLANCO GND - MARRON CIRCUITO DE LA CENTRAL Como se observa en la figura, el circuito de la central, tiene comunicación RS232 para enviar los mensajes al celular, RS232 para la comunicación con la PC, tiene el CI MAX485, para la comunicación con las estaciones, tiene leds visualizadores de los 3 pabellones y una salida a la sirena que permitirá escuchar la alarma. 67

68 CAPITULO III METODOLOGÍA Figura Circuito esquemático de la Central Figura Diseño del Circuito impreso de la Central 68
69 CAPITULO III METODOLOGÍA En las figuras siguientes se observan los circuitos de las Estaciones para cada Pabellón. Consta de 2 sensores infrarrojos, pulsadores para desactivar las alarmas y enviar el Id de identificación a la central, para que ésta envíe el mensaje a los celulares. También tiene el CI MAX485, que permite la comunicación RS485. Cada estación también tiene una sirena para la alarma. Estos circuitos son modulares, se pueden ir agregando a otros pabellones. Figura Circuito esquemático de las Estaciones para cada Pabellón 69

70 CAPITULO III METODOLOGÍA Figura Diseño del Circuito Impreso de las Estaciones para cada Pabellón. 3.4 DISEÑO DEL SOFTWARE El firmware o software de los pic16f84 de las tarjetas de cada estación, para cada pabellón, es un bucle, que permanentemente está revisando el estado de los pines donde se han conectado los sensores. Si los sensores no se activan las alarmas no se disparan. En caso de que una alarma se dispare, entra en la condición respectiva y envía el identificador del sensor que se ha activado a la central, además de emitir la alarma audible, en el pabellón respectivo. 70
71 CAPITULO III METODOLOGÍA Sensor 1? SI Sonido Audible Alarma 1 Enviar Información a Central NO Sensor 2 o Pulsador? SI Sonido Audible Alarma 2 Enviar Información a Central NO Figura DIAGRAMA DE FLUJO DEL PROGRAMA PARA CADA MÓDULO if Sensor1 = 1 then SerOut Tx,N9600,["E",11] pause 100 high led ENDIF La alarma, también se activa, en caso que el usuario oprima un pulsador IF Sensor2 = 1 EnviaMSG = 1 then SerOut Tx,N9600,["E",12] pause 100 high led high son endif 71
72 CAPITULO III METODOLOGÍA Después que se ha verificado y se haya atendido la alarma respectiva, hay un pulsador que permite apagar la alarma, además de reportar a la central de que todo está OK. if Desactivar = 1 then SerOut Tx,N9600,["E",10] low led low son endif Con respecto a la Central se hace lo siguiente: Se revisa constantemente la comunicación. En los protocolos de comunicación se ha incluido el caracter "E" mas el identificador. Si no se recepciona este caracter mas el identificador, el programa se mantiene en este bucle, esperando a que se reciba el código correspondiente que me identifica el pabellón mas el sensor activado. NO Dato Bus? SI Identificar Alarma Enviar SMS Enviar Información a PC Sonido Audible Alarma Figura Diagrama de Flujo del Programa que contiene el Pic16F
73 CAPITULO III METODOLOGÍA Escanear: SerIn2 rx,84,1000,escanear,[wait("e"),id] La variable Id tiene 2 caracteres, el primero identifica el pabellón y el segundo identifica el sensor activado. Por ejemplo el siguiente código, con Id = 11, identifica al Pabellón de laboratorios de la Escuela Profesional de Ingeniería Electrónica y Telecomunicaciones, con el sensor infrarrojo de la entrada. Este se envía a la central, para hacer de su conocimiento y a la vez enviar el mensaje de texto correspondiente al Personal de seguridad del Pabellón de laboratorios de la Escuela Profesional de Ingeniería Electrónica y Telecomunicaciones. if Id = 11 then HIGH AlarmaP1 if ContE11 = 0 then SerOut2 TxPC,84,["E",Id,13] 'Se envía a Seguridad del Pabellón PAUSE 10 GOSUB Configurar GOSUB Enviar_SMS_EA1 ContE11 = 1 endif endif En caso, se logre burlar la primera alarma, hay una segunda, que también se envía a la central y el mensaje de texto, ahora lo reciben todas las personas de Seguridad. El Id = 12, identifica al Pabellón de laboratorios de 73
74 CAPITULO III METODOLOGÍA la Escuela Profesional de Ingeniería Electrónica y Telecomunicaciones y el sensor que se ha disparado, en este caso, es el segundo. if id = 12 then high AlarmaP1 high sonido if ContE12 = 0 then SerOut2 TxPC,84,["E",id,13] 'Se envia a todos PAUSE 10 GOSUB Configurar GOSUB Enviar_SMS_EA1 GOSUB Configurar GOSUB Enviar_SMS_EB1 GOSUB Configurar GOSUB Enviar_SMS_EC1 ContE12 = 1 ENDIF endif Si se han verificado las alarmas en el pabellón respectivo, cada estación enviá un código a la central, para decir que todo está bien. En este caso el Id = 10. Además este código se envía constantemente, si no se recepciona, después de un determinado tiempo, se envía un alarma. 74
75 CAPITULO III METODOLOGÍA If Id = 10 then low AlarmaP1 low sonido If conteo >10 Then SerOut2 TxPC,84,["EA1",13] endif endif Para configurar el celular, indicamos el formato de mensajes en modo TEXTO. Para que el módem envíe un mensaje cuando reciba un nuevo SMS, debemos configurarlo con el comando "AT+CNMI=1,2,0,0,0", donde 1,2 es el valor que permite la recepción de un SMS sin almacenarlo en la Bandeja de entrada y enviarlo al puerto de transmisión del celular SerOut2 TxCEL,84,["AT+CMGF=1",13] Pause 100 SerOut2 TxCEL,84,["AT+CNMI=1,2,0,0,0",13] Pause 100 El comando AT+CSCA solicita al módem el número de teléfono del centro de mensajes. Responde con la siguiente trama: "AT+CSCA=",34," ",34,13. El centro de mensajes de la operadora CLARO es " ". El mensaje que se envía es: ALARMA, SENSOR ACTIVADO 75
76 CAPITULO III METODOLOGÍA SerOut2 TxCEL,84,["AT+CSCA=",34," ",34,13] Pause 100 SerOut2 TxCEL,84,["AT+CMGS=",34," ",34,13] Pause 100 SerOut2 TxCEL,84,["ALARMA: ",13, "SENSOR ACTIVADO!", 26,13] 3.5 LIMITACIONES DEL PROYECTO El sistema no contempla un sistema de backup, pero si sería necesario tenerlo en cuenta, en caso haya corte de energía o no haya suministro de energía. Figura Diseño del Circuito Backup para en caso falle la alimentación. También no se le ha puesto clave para acceso al sistema, ya que lo que se quiere comprobar es la funcionalidad del sistema de alarmas. En caso de agregarlo, se tendría que utilizar un teclado numerico y una 76
77 CAPITULO III METODOLOGÍA pantalla de cristal líquido, LCD, para la respectiva visualización, además del código correspondiente. La idea es leer el valor de tensión mediante un canal del conversor A/D del PIC, esta tensión será distinta para cada tecla presionada siempre y cuando hagamos una buena elección de los valores de las resistencias conectadas. Figura Diseño del Circuito Para ingresar clave y visualización 77
78 CAPITULO IV RESULTADOS OBTENIDOS CAPITULO IV RESULTADOS OBTENIDOS 78
79 CAPITULO IV RESULTADOS OBTENIDOS 4.1 RESULTADOS OBTENIDOS Dividiremos el sistema en 3 etapas y presentar los resultados correspondientes: 1. Con respecto a las estaciones, los sensores infrarrojos, los pulsadores y bocina con los que hemos trabajado, funcionan correctamente, el hardware de las tarjetas con su respectivo software, disparan las alarmas y envían a la Central, por comunicación RS485, los códigos identificadores correspondientes a cada pabellón. 2. La central recibe los códigos, los interpreta y genera la salida de los mensajes cortos. La comunicación que se utilizó entre el pic16f877 y el celular Nokia 3220, es RS232, logrando una perfecta comunicación. Los celulares de los números que se grabaron en los microcntroladores al personal de seguridad, recibieron los mensajes correctamente. El estado de los sensores en la tarjeta, se visualizan con leds y se logran escuchar con sonido audible de una bocina. Opcionalmente se conecta la PC con la Central y se logra monotorear el estado de los sensores de los diferentes pabellones. La Central funciona aún sin la PC. 3. Las distancias que soporta la Norma RS485, logra conectar distancias de hasta 200 metros entre pabellones de los Laboratorios de la Escuela Profesional de Ingeniería Electrónica y Telecomunicaciones y el Pabellón de la Facultad de Educación. La distancia que se cubrió entre la Escuela de Ingeniería Electrónica y el Pabellón de la Facultad de Ciencias es de 60 metros. 79
80 CAPITULO IV RESULTADOS OBTENIDOS Cabe recalcar, que para desconectar las alarmas, hay que ir al pabellón correspondiente y presionar el pulsador adecuado para esto. 80
81 CAPITULO V CONCLUSIONES CAPITULO V CONCLUSIONES 81
82 CAPITULO V CONCLUSIONES 5.1 CONCLUSIONES Se logró implementar un Sistema de Alarmas aplicado para seguridad en los pabellones de la Universidad Nacional de Piura. Para la comunicación entre las estaciones de cada Pabellón y la Central se ha utilizando la Norma de comunicación RS485, logrando cubrir distancias de hasta 250 metros. Para la comunicación de la Central con el Personal de Seguridad se empleó la tecnología GSM, que consiste en enviar mensajes cortos a los celulares del Personal, cuando se disparan las alarmas. El sistema funciona de manera autonoma sin la PC. En caso de que se conecte ésta, sólo sirve para monitorear el estado de los sensores. Se pueden agregar mayor número de alarmas, con el microcontrolador que se ha trabajado, hasta 7 alarmas. Si se agregan y se quiere saber cual alarma se ha disparado, tendriamos que elegir un microncontrolador de mas pines. Si no se desea saber que sensor se ha activado, pero si en que pabellón, se pueden conectar en serie con el mismo microcontrolador que hemos elegido. La activación de las alarmas, en caso de ocurrir un evento en cada estación, es en 100mSeg. La respuesta a la central, en caso de ocurrir un evento, es en 110 mseg. El tiempo de llegada de un mensaje, mucho depende de la central de telefonía, como mínimo es de 7 seg. Y como máximo pueden ser minutos. 82
83 CAPITULO VI BIBLIOGRAFIA CAPITULO VI BIBLIOGRAFÍA 83
84 CAPITULO VI BIBLIOGRAFIA 6.1 BIBLIOGRAFÍA Libros 1. Lehmann. Microcontroladores PIC Prácticas de Programación. Ciudad de México, México: Editorial Marcombo; págs 2. Angulo Jose M. Microcontroladores PIC. Diseño Práctico de Aplicaciones.Primera Parte. Madrid, España: Editorial McGraw- Hill; págs. 3. Angulo José M. Microcontroladores PIC. Diseño Práctico de Aplicaciones.Segunda Parte. Ciudad de México, México: Editorial McGraw-Hill; 2006, 304 págs. 4. Joan Domingo Peña. Comunicaciones en el Entorno Industrial. Aragón, España: Editorial UOC; 2003, 365 págs. 5. Enrique Herrera P. Tecnologías y Redes de Transmisión de Datos. Balderas, México: Editorial Limusa; 2003, 312 págs. 6. Timothy J. Maloney. Electrónica Industrial Moderna. Monroe, Michigan: Editorial Pearson Educación; 2006, 972 págs. 7. Martín E., Angulo J., y Angulo I. Microcontroladores PIC. Editorial ITP Paraninfo. 8. Angulo J. M. Laboratorio de Prácticas de microelectrónica. Vol 1 y 2. Mexico. Editorial McGraw-Hill. 84
85 CAPITULO VI BIBLIOGRAFIA Páginas de Internet Manual de Pic Basic Pro en español, disponible en : Consultado Set 2,2010. Bus de Comunicación RS 485, disponible en : Consultado Set 5,2010. RS-485 BUS WIRING PRIMER, disponible en: mer.pdf Consultado Set 5,2010. RS232: Consultado Ene 7,2011. Manejando el teclado matricial y visualización en LCD: Consultado Abr 5, Detector de Movimiento PIR: Consultado Abr 5, Sensor de Movimiento PIR: Consultado Abr 5, Detector de Movimiento PIR: Consultado Abr 5, Sensor Magnético: Consultado Abr 5,
86 CAPITULO VI BIBLIOGRAFIA Detectores de rotura de cristales: ACUSTIC-ROTURA-CRISTAL.htm Consultado Abr 5, DETECTOR DE ROTURA DE CRISTALES X10 S110530: Consultado Abr 5, Barreras Infrarrojas: Consultado Abr 5,
87 ANEXOS ANEXOS 87
88 ANEXOS INDICE DE TABLAS Tabla Página Tabla 1 Características de los modelos PIC12C(F)XXX de la gama enana Tabla 2 Características de los modelos PIC16C 5X de la gama baja Tabla 3 Características relevantes de los modelos PIC16X8X de la gama media Tabla 4. Características más destacadas de los modelos PIC17CXXX de la gama alta Tabla 5 PINES DE CONEXIÓN DEL PUERTO DB Tabla 6Convenciones de valores lógicos en la comunicación RS Tabla 7Descripción de pines del pic16f
89 ANEXOS INDICE DE ILUSTRACIONES O FIGURAS Figura Página Figura 2.1. Estructura de un sistema abierto basado en un microprocesador. La disponibilidad de los buses en el exterior permite que se configure a la medida de la aplicación Figura 2.2. El microcontrolador en un sistema cerrado. Todas las partes del computador están contenidas en su interior y sólo salen al exterior las líneas que gobiernan los periféricos Figura 2.3. En la arquitectura de «von Neumann» la UCP se comunicaba a través de un sistema de buses con la Memoria, donde se guardaban las instrucciones y los datos Figura 2.4. En la arquitectura «Harvard» la memoria de instrucciones y la de datos son independientes, lo que permite optimizar sus características y propiciar el paralelismo. En la figura, la memoria de instrucciones tiene 1 K posiciones de 14 bits cada una, mientras que la de datos sólo dispone de 512 posiciones de un byte Figura 2.5. Diagrama de conexiones de los PIC12Cxxx de la gama enana Figura 2.6. Diagrama de patitas de los PIC de la gama baja que responden a la nomenclatura PIC16C54/ Figura 2.7. Diagrama de patitas del PIC16F877, uno de los modelos más representativos de la gama media Figura 2.8. Comunicación RS485-Modo Half Duplex Figura 2.9. Conector DB9 para comunicación serial Figura 3.1. GRAFICO RESUMEN DEL BUS PRINCIPAL Y SUS ESTACIONES CON LOS SENSORES Figura 3.2. Sensor Detector de Movimiento Figura 3.2. Sensor Detector de Movimiento Figura 3.3. Conexión del PIR al microcontrolador Figura 3.4. Sensor Detector magnético Figura 3.5. Sensor Detector de rotura de cristales Figura 3.6. Sensor Barrera infrarroja Figura 3.7. Sirena de alarma Figura 3.8. Circuito Integrado Pic16F Figura 3.9. Puertos del pic16f Figura Circuito Integrado Pic16F Figura Puerto de comunicación del NOKIA Figura CableKU Figura Conexión del NOKIA 3220 y PIC16F84 con el cable DKU Figura Circuito esquemático de la Central Figura Diseño del Circuito impreso de la Central Figura Circuito esquemático de las Estaciones para cada Pabellón
90 ANEXOS Figura Diseño del Circuito Impreso de las Estaciones para cada Pabellón Figura DIAGRAMA DE FLUJO DEL PROGRAMA PARA CADA MÓDULO Figura Diagrama de Flujo del Programa que contiene el Pic16F Figura Diseño del Circuito Backup para en caso falle la alimentación Figura Diseño del Circuito Para ingresar clave y visualización

91 ANEXOS DATASHET MAX485 91

92 ANEXOS 92

93 ANEXOS 93

94 ANEXOS 94
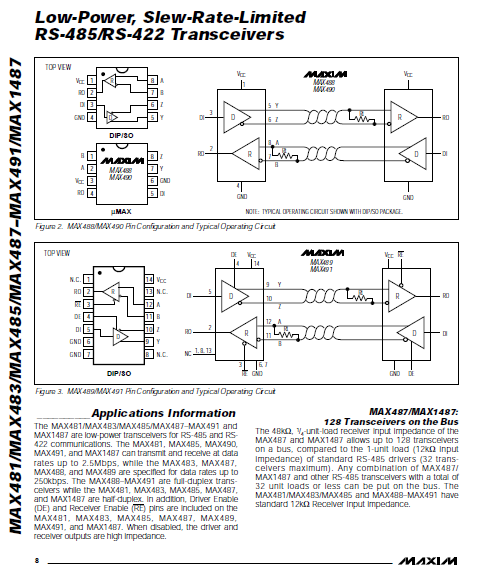
95 ANEXOS 95
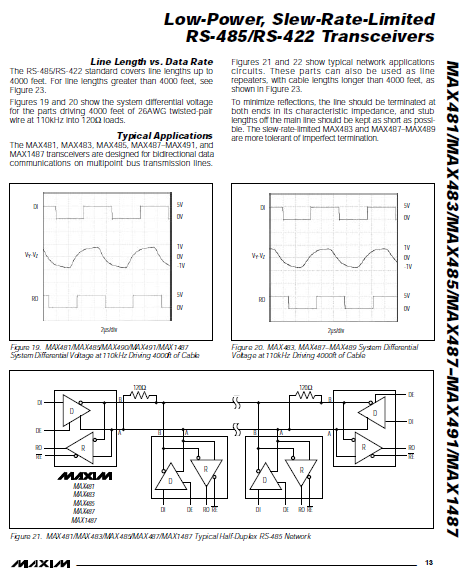
96 ANEXOS 96
97 ANEXOS 97
98 ANEXOS DATASHET RS232 98

99 ANEXOS 99

100 ANEXOS 100
101 ANEXOS 101
102 ANEXOS 102

103 ANEXOS DATASHET PIC16F84 103

104 ANEXOS 104

105 ANEXOS 105
106 ANEXOS DATASHET PIC16F

107 ANEXOS 107
108 ANEXOS 108
109 ANEXOS 109

110 ANEXOS 110
111 ANEXOS 111

112 ANEXOS 112

113 ANEXOS 113
114 ANEXOS COMANDO AT 114
115 ANEXOS 115
116 ANEXOS 116
117 ANEXOS 117

118 ANEXOS 118

119 ANEXOS 119
PRIMERA PARTE. La gama básica: el humilde PIC12F508 TEORÍA
 PRIMERA PARTE La gama básica: el humilde PIC12F508 TEORÍA Microcontrolador: la solución está en un chip CAPÍTULO 1 1.1. QUÉ ES UN MICROCONTROLADOR? Es un pequeño computador construido sobre el «chip»
PRIMERA PARTE La gama básica: el humilde PIC12F508 TEORÍA Microcontrolador: la solución está en un chip CAPÍTULO 1 1.1. QUÉ ES UN MICROCONTROLADOR? Es un pequeño computador construido sobre el «chip»
Placa de control MCC03
 Placa de control MCC03 Placa de control MCC03 La placa de control basada en el micro controlador PIC 16F874A de Microchip, es la encargada del procesar los datos que se introducen en el sistema y actuar
Placa de control MCC03 Placa de control MCC03 La placa de control basada en el micro controlador PIC 16F874A de Microchip, es la encargada del procesar los datos que se introducen en el sistema y actuar
DESCRIPCION DEL SITEMA MASTER.
 DESCRIPCION DEL SITEMA MASTER. ESTRUCTURA. El sistema MASTER (Sistema Modular para Control Adaptativo en Tiempo Real) se ha implementado en base a un computador compatible PC-AT, dotado de una tarjeta
DESCRIPCION DEL SITEMA MASTER. ESTRUCTURA. El sistema MASTER (Sistema Modular para Control Adaptativo en Tiempo Real) se ha implementado en base a un computador compatible PC-AT, dotado de una tarjeta
CAPÍTULO I. Sistemas de Control Distribuido (SCD).
.") 1.1 Sistemas de Control. Un sistema es un ente cuya función es la de recibir acciones externas llamadas variables de entrada que a su vez provocan una o varias reacciones como respuesta llamadas variables
1.1 Sistemas de Control. Un sistema es un ente cuya función es la de recibir acciones externas llamadas variables de entrada que a su vez provocan una o varias reacciones como respuesta llamadas variables
UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3
 UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3 INTRODUCCIÓN El elemento hardware de un sistema básico de proceso de datos se puede estructurar en tres partes claramente diferenciadas en cuanto a sus funciones:
UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3 INTRODUCCIÓN El elemento hardware de un sistema básico de proceso de datos se puede estructurar en tres partes claramente diferenciadas en cuanto a sus funciones:
Desde el punto de vista físico en un ordenador se pueden distinguir los siguientes elementos:
 Desde el punto de vista físico en un ordenador se pueden distinguir los siguientes elementos: Unidad Central de proceso (CPU/UCP): Unidad que se encarga del control del ordenador, procesando para ello
Desde el punto de vista físico en un ordenador se pueden distinguir los siguientes elementos: Unidad Central de proceso (CPU/UCP): Unidad que se encarga del control del ordenador, procesando para ello
DISEÑO E IMPLEMENTACIÓN DE UNA TARJETA DE ADQUISICIÓN DE DATOS PARA EL LABORATORIO DE TELECOMUNICACIONES DE LA FIEC.
 TESIS DISEÑO E IMPLEMENTACIÓN DE UNA TARJETA DE ADQUISICIÓN DE DATOS PARA EL LABORATORIO DE TELECOMUNICACIONES DE LA FIEC. DIRECTOR DE TESIS.- Ing. Francisco Novillo AUTOR Walter Mestanza Vera. Egresado
TESIS DISEÑO E IMPLEMENTACIÓN DE UNA TARJETA DE ADQUISICIÓN DE DATOS PARA EL LABORATORIO DE TELECOMUNICACIONES DE LA FIEC. DIRECTOR DE TESIS.- Ing. Francisco Novillo AUTOR Walter Mestanza Vera. Egresado
e-netcamanpr INDICE: Manual de Instalación
 INDICE: INTRODUCCIÓN... 4 ELEMENTOS DEL SISTEMA.... 5 SOFTWARE.... 5 ARQUITECTURA DE LA SOLUCIÓN SOFTWARE.... 5 INSTALACIÓN DEL SISTEMA.... 8 CÁMARA.... 8 VELOCIDAD DEL VEHICULO.... 9 MODELO ACONSEJADO....
INDICE: INTRODUCCIÓN... 4 ELEMENTOS DEL SISTEMA.... 5 SOFTWARE.... 5 ARQUITECTURA DE LA SOLUCIÓN SOFTWARE.... 5 INSTALACIÓN DEL SISTEMA.... 8 CÁMARA.... 8 VELOCIDAD DEL VEHICULO.... 9 MODELO ACONSEJADO....
Tema 11: Instrumentación virtual
 Tema 11: Instrumentación virtual Solicitado: Tarea 09: Mapa conceptual: Instrumentación Virtual M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx @edfrancom edgardoadrianfrancom
Tema 11: Instrumentación virtual Solicitado: Tarea 09: Mapa conceptual: Instrumentación Virtual M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx @edfrancom edgardoadrianfrancom
SEWERIN. Pre Localización De Fugas de Agua
 SEWERIN Pre Localización De Fugas de Agua Ventajas del sistema La Pre localización de fugas de agua consiste en la escucha de la red en varios puntos. Para ello se utilizan loggers que graban sus sonidos
SEWERIN Pre Localización De Fugas de Agua Ventajas del sistema La Pre localización de fugas de agua consiste en la escucha de la red en varios puntos. Para ello se utilizan loggers que graban sus sonidos
CAPÍTULO 1 Instrumentación Virtual
 CAPÍTULO 1 Instrumentación Virtual 1.1 Qué es Instrumentación Virtual? En las últimas décadas se han incrementado de manera considerable las aplicaciones que corren a través de redes debido al surgimiento
CAPÍTULO 1 Instrumentación Virtual 1.1 Qué es Instrumentación Virtual? En las últimas décadas se han incrementado de manera considerable las aplicaciones que corren a través de redes debido al surgimiento
INTRODUCCION A LA PROGRAMACION DE PLC
 INTRODUCCION A LA PROGRAMACION DE PLC Esta guía se utilizará para estudiar la estructura general de programación de um PLC Instrucciones y Programas Una instrucción u orden de trabajo consta de dos partes
INTRODUCCION A LA PROGRAMACION DE PLC Esta guía se utilizará para estudiar la estructura general de programación de um PLC Instrucciones y Programas Una instrucción u orden de trabajo consta de dos partes
UNIVERSIDAD DE SAN CARLOS DE GUATEMALA FACULTAD DE INGENIERIA ESCUELA DE MECANICA ELECTRICA LABORATORIO DE ELECTRONICA PENSUM COMUNICACIONES 3
 UNIVERSIDAD DE SAN CARLOS DE GUATEMALA FACULTAD DE INGENIERIA ESCUELA DE MECANICA ELECTRICA LABORATORIO DE ELECTRONICA PENSUM COMUNICACIONES 3 ~ 1 ~ ÍNDICE Introducción...página 3 Prácticas LabVolt...página
UNIVERSIDAD DE SAN CARLOS DE GUATEMALA FACULTAD DE INGENIERIA ESCUELA DE MECANICA ELECTRICA LABORATORIO DE ELECTRONICA PENSUM COMUNICACIONES 3 ~ 1 ~ ÍNDICE Introducción...página 3 Prácticas LabVolt...página
COMUNICACIÓN I2C (INTER-INTEGRATED CIRCUIT)
") COMUNICACIÓN I2C (INTER-INTEGRATED CIRCUIT) Centro CFP/ES COMUNICACIÓN I2C 1 VENTAJAS DE LA COMUNICACIÓN I2C COMPARATIVA ESTANDAR DE TRANSMISIÓN 2 DISPOSITIVOS I2C DISPOSITIVOS I2C MAX518 3 DISPOSITIVOS
COMUNICACIÓN I2C (INTER-INTEGRATED CIRCUIT) Centro CFP/ES COMUNICACIÓN I2C 1 VENTAJAS DE LA COMUNICACIÓN I2C COMPARATIVA ESTANDAR DE TRANSMISIÓN 2 DISPOSITIVOS I2C DISPOSITIVOS I2C MAX518 3 DISPOSITIVOS
3. FUNCIONAMIENTO DE LA FUNCIONES TXD Y RXD 4. EJEMPLO DE ENVÍO DE SMS DESDE EL PLC 5. EJEMPLO DE RECEPCIÓN DE SMS EN EL PLC
 MÓDEM-GSM INDICE 1. INTRODUCCIÓN Centro Integrado Politécnico ETI Departamento de Electricidad 2. CONFIGURACIÓN PUERTO SERIE CPU 3. FUNCIONAMIENTO DE LA FUNCIONES TXD Y RXD 4. EJEMPLO DE ENVÍO DE SMS DESDE
MÓDEM-GSM INDICE 1. INTRODUCCIÓN Centro Integrado Politécnico ETI Departamento de Electricidad 2. CONFIGURACIÓN PUERTO SERIE CPU 3. FUNCIONAMIENTO DE LA FUNCIONES TXD Y RXD 4. EJEMPLO DE ENVÍO DE SMS DESDE
TRANSPRO EL TRANSPORTE URBANO DEL MONTEVIDEO DEL MAÑANA
 EL TRANSPORTE URBANO DEL MONTEVIDEO DEL MAÑANA TRANSPRO Solución Tecnológica para Control Satelital de Flotas, Información de Arribo y Cobranza Inteligente TRANSPRO es la única Solución Tecnológica capaz
EL TRANSPORTE URBANO DEL MONTEVIDEO DEL MAÑANA TRANSPRO Solución Tecnológica para Control Satelital de Flotas, Información de Arribo y Cobranza Inteligente TRANSPRO es la única Solución Tecnológica capaz
Programación y diseño de dispositivos mediante microcontroladores PIC
 Metodología de Programación, Programación en C, Aplicaciones electrónicas 1 / 7 Programación y diseño de dispositivos mediante microcontroladores PIC Hemos elegido el microcontrolador PIC16F84 por las
Metodología de Programación, Programación en C, Aplicaciones electrónicas 1 / 7 Programación y diseño de dispositivos mediante microcontroladores PIC Hemos elegido el microcontrolador PIC16F84 por las
1. INTRODUCCION A LOS MICROCONTROLADORES...3
 Modificado por Luis Frino www.frino.com.ar Fuente www.micro1.com.ar 1. INTRODUCCION A LOS MICROCONTROLADORES...3 1.1 CONTROLADOR Y MICROCONTROLADOR...3 1.2 DIFERENCIA ENTRE MICROPROCESADOR Y MICROCONTROLADOR...4
Modificado por Luis Frino www.frino.com.ar Fuente www.micro1.com.ar 1. INTRODUCCION A LOS MICROCONTROLADORES...3 1.1 CONTROLADOR Y MICROCONTROLADOR...3 1.2 DIFERENCIA ENTRE MICROPROCESADOR Y MICROCONTROLADOR...4
Diseño de Sistemas embebidos y comunicaciones: Aplicaciones de telefonía, RF y localización remota. Ing. José Oliden Martínez
 Diseño de Sistemas embebidos y comunicaciones: Aplicaciones de telefonía, RF y localización remota El controlador dentro de un sistema de Control DISPOSITIVO DE MEDICIÓN CONVERSOR ANÁLOGO DIGITAL CONTROLADOR
Diseño de Sistemas embebidos y comunicaciones: Aplicaciones de telefonía, RF y localización remota El controlador dentro de un sistema de Control DISPOSITIVO DE MEDICIÓN CONVERSOR ANÁLOGO DIGITAL CONTROLADOR
USB (Universal Serial Bus)
") USB (Universal Serial Bus) USB es una interfaz para transmisión de datos y distribución de energía que ha sido introducida en el mercado de PC s y periféricos para mejorar las lentas interfaces serie (RS-232)
USB (Universal Serial Bus) USB es una interfaz para transmisión de datos y distribución de energía que ha sido introducida en el mercado de PC s y periféricos para mejorar las lentas interfaces serie (RS-232)
HARDWARE DE SISTEMA AUTOMÁTICO DE RASTREO DE VEHÍCULOS MEDIANTE TECNOLOGÍAS GPRS Y GPS
 HARDWARE DE SISTEMA AUTOMÁTICO DE RASTREO DE VEHÍCULOS MEDIANTE TECNOLOGÍAS GPRS Y GPS Ing. Javier A. Garabello Facultad Regional Villa María UTN Av. Universidad 450 Tel: 0353-4537500 javiergarabello@hotmail.com
HARDWARE DE SISTEMA AUTOMÁTICO DE RASTREO DE VEHÍCULOS MEDIANTE TECNOLOGÍAS GPRS Y GPS Ing. Javier A. Garabello Facultad Regional Villa María UTN Av. Universidad 450 Tel: 0353-4537500 javiergarabello@hotmail.com
SCT3000 95. Software para la calibración de transductores de fuerza. Versión 3.5. Microtest S.A. microtes@arrakis.es
 SCT3000 95 Versión 3.5 Software para la calibración de transductores de fuerza. Microtest S.A. microtes@arrakis.es Introducción El programa SCT3000 95, es un sistema diseñado para la calibración automática
SCT3000 95 Versión 3.5 Software para la calibración de transductores de fuerza. Microtest S.A. microtes@arrakis.es Introducción El programa SCT3000 95, es un sistema diseñado para la calibración automática
AUTOMATIZACION. Reconocer la arquitectura y características de un PLC Diferenciar los tipos de entradas y salidas
 AUTOMATIZACION GUIA DE TRABAJO 2 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Reconocer la arquitectura
AUTOMATIZACION GUIA DE TRABAJO 2 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Reconocer la arquitectura
SISTEMA PROTOTIPO DE HOGAR INTELIGENTE (SPHI)
") SISTEMA PROTOTIPO DE HOGAR INTELIGENTE (SPHI) OBJETIVO : En el presente documento se describen los requerimientos que debe de cumplir la aplicación denominada Sistema Prototipo de Hogar Inteligente, la
SISTEMA PROTOTIPO DE HOGAR INTELIGENTE (SPHI) OBJETIVO : En el presente documento se describen los requerimientos que debe de cumplir la aplicación denominada Sistema Prototipo de Hogar Inteligente, la
UNIVERSIDAD TECNOLOGICA ECOTEC DIEGO BARRAGAN MATERIA: Sistemas Operativos 1 ENSAYO: Servidores BLADE
 UNIVERSIDAD TECNOLOGICA ECOTEC DIEGO BARRAGAN MATERIA: Sistemas Operativos 1 ENSAYO: Servidores BLADE AÑO: 2010 Qué es un servidor Blade? Blade Server es una arquitectura que ha conseguido integrar en
UNIVERSIDAD TECNOLOGICA ECOTEC DIEGO BARRAGAN MATERIA: Sistemas Operativos 1 ENSAYO: Servidores BLADE AÑO: 2010 Qué es un servidor Blade? Blade Server es una arquitectura que ha conseguido integrar en
CONEXIONADOS OPCIONALES
 CLP Portátil Caudalímetro - Balanza CONEXIONADOS OPCIONALES ALPHA C.I.S.A. / HPing. 03571-422551 / 431124 Comentarios El caudalímetro de áridos, en su versión CLP Portátil, permite su interconexión con
CLP Portátil Caudalímetro - Balanza CONEXIONADOS OPCIONALES ALPHA C.I.S.A. / HPing. 03571-422551 / 431124 Comentarios El caudalímetro de áridos, en su versión CLP Portátil, permite su interconexión con
UNIVERSIDAD DE SALAMANCA
 UNIVERSIDAD DE SALAMANCA FACULTAD DE CIENCIAS INGENIERÍA TÉCNICA EN INFORMÁTICA DE SISTEMAS Resumen del trabajo práctico realizado para la superación de la asignatura Proyecto Fin de Carrera. TÍTULO SISTEMA
UNIVERSIDAD DE SALAMANCA FACULTAD DE CIENCIAS INGENIERÍA TÉCNICA EN INFORMÁTICA DE SISTEMAS Resumen del trabajo práctico realizado para la superación de la asignatura Proyecto Fin de Carrera. TÍTULO SISTEMA
INSTITUTO VYGOTSKY PREESCOLAR, PRIMARIA Y SECUNDARIA USO DE LA MEMORIA USB
 INSTITUTO VYGOTSKY PREESCOLAR, PRIMARIA Y SECUNDARIA USO DE LA MEMORIA USB QUÉ ES? Es un pequeño dispositivo de almacenamiento que utiliza memoria flash para guardar información. Estas memorias se han
INSTITUTO VYGOTSKY PREESCOLAR, PRIMARIA Y SECUNDARIA USO DE LA MEMORIA USB QUÉ ES? Es un pequeño dispositivo de almacenamiento que utiliza memoria flash para guardar información. Estas memorias se han
Como funcionan las corrientes portadoras
 El sistema X-10 es el sistema estándar de tantos sistemas de corrientes portadoras ya que es el que más extendido. Este sistema se creo hace más de 20 años y sus antiguos componentes siguen funcionando
El sistema X-10 es el sistema estándar de tantos sistemas de corrientes portadoras ya que es el que más extendido. Este sistema se creo hace más de 20 años y sus antiguos componentes siguen funcionando
ACTIVIDAD No. 2 REPASO DE REDES INFORMATICAS
 ACTIVIDAD No. 2 REPASO DE REDES INFORMATICAS GRADO 11 Nombre(s) y Apellidos: Karen Andrea Marín Mendoza Documento: 98110301014 FICHA NÚMERO COLEGIO Instituto Madre Del Buen Consejo FECHA: 23 de abril 2014
ACTIVIDAD No. 2 REPASO DE REDES INFORMATICAS GRADO 11 Nombre(s) y Apellidos: Karen Andrea Marín Mendoza Documento: 98110301014 FICHA NÚMERO COLEGIO Instituto Madre Del Buen Consejo FECHA: 23 de abril 2014
ACTIVIDADES TEMA 1. EL LENGUAJE DE LOS ORDENADORES. 4º E.S.O- SOLUCIONES.
 1.- a) Explica qué es un bit de información. Qué es el lenguaje binario? Bit es la abreviatura de Binary digit. (Dígito binario). Un bit es un dígito del lenguaje binario que es el lenguaje universal usado
1.- a) Explica qué es un bit de información. Qué es el lenguaje binario? Bit es la abreviatura de Binary digit. (Dígito binario). Un bit es un dígito del lenguaje binario que es el lenguaje universal usado
SEGURIDAD + DOMÓTICA Soluciones de confort y seguridad para él hogar del siglo XXI
 SEGURIDAD + DOMÓTICA Soluciones de confort y seguridad para él hogar del siglo XXI DOMÓTICA: Una nueva forma de vida La Domótica define la incorporación de tecnología a la vivienda que permita su control
SEGURIDAD + DOMÓTICA Soluciones de confort y seguridad para él hogar del siglo XXI DOMÓTICA: Una nueva forma de vida La Domótica define la incorporación de tecnología a la vivienda que permita su control
La informática es el conjunto de técnicas y conocimientos necesarios para el tratamiento automático de la información mediante el ordenador.
 Qué es la informática? La informática es el conjunto de técnicas y conocimientos necesarios para el tratamiento automático de la información mediante el ordenador. Se llama sistema informático al sistema
Qué es la informática? La informática es el conjunto de técnicas y conocimientos necesarios para el tratamiento automático de la información mediante el ordenador. Se llama sistema informático al sistema
SERVIDOR WEB PARA ACCESO EN TIEMPO REAL A INFORMACIÓN METEOROLÓGICA DISTRIBUIDA
 SERVIDOR WEB PARA ACCESO EN TIEMPO REAL A INFORMACIÓN METEOROLÓGICA DISTRIBUIDA E. SÁEZ, M. ORTIZ, F. QUILES, C. MORENO, L. GÓMEZ Área de Arquitectura y Tecnología de Computadores. Departamento de Arquitectura
SERVIDOR WEB PARA ACCESO EN TIEMPO REAL A INFORMACIÓN METEOROLÓGICA DISTRIBUIDA E. SÁEZ, M. ORTIZ, F. QUILES, C. MORENO, L. GÓMEZ Área de Arquitectura y Tecnología de Computadores. Departamento de Arquitectura
Unidad 1: Conceptos generales de Sistemas Operativos.
 Unidad 1: Conceptos generales de Sistemas Operativos. Tema 2: Estructura de los sistemas de computación. 2.1 Funcionamiento de los sistemas de computación. 2.2 Ejecución de instrucciones e interrupciones
Unidad 1: Conceptos generales de Sistemas Operativos. Tema 2: Estructura de los sistemas de computación. 2.1 Funcionamiento de los sistemas de computación. 2.2 Ejecución de instrucciones e interrupciones
6. DESCRIPCIÓN DEL SOFTWARE
 Capítulo 2. Equipo 6. DESCRIPCIÓN DEL SOFTWARE 6.1 Introducción El equipo de medida descrito en el capítulo anterior lleva asociado un software que hace de sistema de control del proceso de medición. Este
Capítulo 2. Equipo 6. DESCRIPCIÓN DEL SOFTWARE 6.1 Introducción El equipo de medida descrito en el capítulo anterior lleva asociado un software que hace de sistema de control del proceso de medición. Este
Los mayores cambios se dieron en las décadas de los setenta, atribuidos principalmente a dos causas:
 SISTEMAS DISTRIBUIDOS DE REDES 1. SISTEMAS DISTRIBUIDOS Introducción y generalidades La computación desde sus inicios ha sufrido muchos cambios, desde los grandes equipos que permitían realizar tareas
SISTEMAS DISTRIBUIDOS DE REDES 1. SISTEMAS DISTRIBUIDOS Introducción y generalidades La computación desde sus inicios ha sufrido muchos cambios, desde los grandes equipos que permitían realizar tareas
SISTEMA CF-MEDIA: Control de Audio/Video integrado en KNX. Futurasmus, S.L. Eibshop-Spain www.futurasmus.es www.eib-shop.es Tel.: +34 965 95 95 11 1
 SISTEMA CF-MEDIA: Control de Audio/Video integrado en KNX Futurasmus, S.L. Eibshop-Spain www.futurasmus.es www.eib-shop.es Tel.: +34 965 95 95 11 1 Contenido Futurasmus, S.L., como representante en exclusiva
SISTEMA CF-MEDIA: Control de Audio/Video integrado en KNX Futurasmus, S.L. Eibshop-Spain www.futurasmus.es www.eib-shop.es Tel.: +34 965 95 95 11 1 Contenido Futurasmus, S.L., como representante en exclusiva
CATEDRA de PROYECTO FINAL
 UNIVERSIDAD TECNOLOGICA NACIONAL FACULTAD REGIONAL AVELLANEDA CATEDRA de PROYECTO FINAL TITULO DEL PROYECTO: CONTROL DE CAMARAS FRIGORIFICAS TITULO DEL INFORME: MANUAL TÉCNICO PROFESOR(ES): ING. LOPEZ
UNIVERSIDAD TECNOLOGICA NACIONAL FACULTAD REGIONAL AVELLANEDA CATEDRA de PROYECTO FINAL TITULO DEL PROYECTO: CONTROL DE CAMARAS FRIGORIFICAS TITULO DEL INFORME: MANUAL TÉCNICO PROFESOR(ES): ING. LOPEZ
Ejemplo de Prestaciones para Sistema Domótico en Versión BÁSICA Cliente: PROMOTOR
 Ejemplo de Prestaciones para Sistema Domótico en Versión BÁSICA Cliente: PROMOTOR Fecha: Octubre de 2009 Índice Cliente: PROMOTOR M2iT Consultores Fecha: Octubre de 2009 Página: 3/12 1. SERVICIOS INCLUIDOS
Ejemplo de Prestaciones para Sistema Domótico en Versión BÁSICA Cliente: PROMOTOR Fecha: Octubre de 2009 Índice Cliente: PROMOTOR M2iT Consultores Fecha: Octubre de 2009 Página: 3/12 1. SERVICIOS INCLUIDOS
Sistema de control de equipos electrónicos vía Internet mediante dispositivos móviles
 Sistema de control de equipos electrónicos vía Internet mediante dispositivos móviles Verástegui, Romero Hugo Armando Sariñana, Cossio Carlos Alberto Arellano, López Roberto Carlos Instituto Tecnológico
Sistema de control de equipos electrónicos vía Internet mediante dispositivos móviles Verástegui, Romero Hugo Armando Sariñana, Cossio Carlos Alberto Arellano, López Roberto Carlos Instituto Tecnológico
Sistemas de Seguridad y Vigilancia. Soluciones profesionales para seguridad y vigilancia remota de casas y oficinas
 Sistemas de Seguridad y Vigilancia Soluciones profesionales para seguridad y vigilancia remota de casas y oficinas Introducción Desafortunadamente, los problemas actuales de inseguridad y delincuencia
Sistemas de Seguridad y Vigilancia Soluciones profesionales para seguridad y vigilancia remota de casas y oficinas Introducción Desafortunadamente, los problemas actuales de inseguridad y delincuencia
RED DE CENTRALES ANALÓGICAS (NRT)
") RED DE CENTRALES ANALÓGICAS (NRT) La red de centrales analógicas NOTI-FIRE-NET es una red de área local (LAN) punto a punto con regeneración de señal, capaz de controlar hasta 103 nodos con un total de
RED DE CENTRALES ANALÓGICAS (NRT) La red de centrales analógicas NOTI-FIRE-NET es una red de área local (LAN) punto a punto con regeneración de señal, capaz de controlar hasta 103 nodos con un total de
Una computadora de cualquier forma que se vea tiene dos tipos de componentes: El Hardware y el Software.
 ARQUITECTURA DE LAS COMPUTADORAS QUE ES UNA COMPUTADORA (UN ORDENADOR)? Existen numerosas definiciones de una computadora, entre ellas las siguientes: 1) Una computadora es un dispositivo capaz de realizar
ARQUITECTURA DE LAS COMPUTADORAS QUE ES UNA COMPUTADORA (UN ORDENADOR)? Existen numerosas definiciones de una computadora, entre ellas las siguientes: 1) Una computadora es un dispositivo capaz de realizar
ÍNDICE DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ
 ELECTRÓNICA DIGITAL DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ IES TRINIDAD ARROYO DPTO. DE ELECTRÓNICA ÍNDICE ÍNDICE... 1 1. LIMITACIONES DE LOS CONTADORES ASÍNCRONOS... 2 2. CONTADORES SÍNCRONOS...
ELECTRÓNICA DIGITAL DISEÑO DE CONTADORES SÍNCRONOS JESÚS PIZARRO PELÁEZ IES TRINIDAD ARROYO DPTO. DE ELECTRÓNICA ÍNDICE ÍNDICE... 1 1. LIMITACIONES DE LOS CONTADORES ASÍNCRONOS... 2 2. CONTADORES SÍNCRONOS...
Tecnología IP para videovigilancia... Los últimos avances han hecho posible conectar cámaras directamente a una red de ordenadores basada en el
 para videovigilancia....... Los últimos avances han hecho posible conectar cámaras directamente a una red de ordenadores basada en el protocolo IP. La tecnología de las cámaras de red permite al usuario
para videovigilancia....... Los últimos avances han hecho posible conectar cámaras directamente a una red de ordenadores basada en el protocolo IP. La tecnología de las cámaras de red permite al usuario
Nociones básicas sobre adquisición de señales
 Electrónica ENTREGA 1 Nociones básicas sobre adquisición de señales Elaborado por Juan Antonio Rubia Mena Introducción Con este documento pretendemos dar unas nociones básicas sobre las técnicas de medida
Electrónica ENTREGA 1 Nociones básicas sobre adquisición de señales Elaborado por Juan Antonio Rubia Mena Introducción Con este documento pretendemos dar unas nociones básicas sobre las técnicas de medida
Microcontroladores. 1. Controlador y microcontrolador.
 Microcontroladores Los microcontroladores (ŲC) están conquistando el mundo. Están presentes en nuestro trabajo, en nuestra casa y en nuestra vida, en general. Se pueden encontrar controlando el funcionamiento
Microcontroladores Los microcontroladores (ŲC) están conquistando el mundo. Están presentes en nuestro trabajo, en nuestra casa y en nuestra vida, en general. Se pueden encontrar controlando el funcionamiento
SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética.
 SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética. A diferencia de los sistemas monofásicos de C.A., estudiados hasta ahora, que utilizan dos conductores
SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética. A diferencia de los sistemas monofásicos de C.A., estudiados hasta ahora, que utilizan dos conductores
Anexo B. Comunicaciones entre mc y PC
 Anexo B Comunicaciones entre mc y PC En este apartado se hará hincapié en los comandos para el manejo del módulo de comunicaciones desde el PC. Conociendo estos comando se podrá realizar una aplicación
Anexo B Comunicaciones entre mc y PC En este apartado se hará hincapié en los comandos para el manejo del módulo de comunicaciones desde el PC. Conociendo estos comando se podrá realizar una aplicación
1.1 EL ESTUDIO TÉCNICO
 1.1 EL ESTUDIO TÉCNICO 1.1.1 Definición Un estudio técnico permite proponer y analizar las diferentes opciones tecnológicas para producir los bienes o servicios que se requieren, lo que además admite verificar
1.1 EL ESTUDIO TÉCNICO 1.1.1 Definición Un estudio técnico permite proponer y analizar las diferentes opciones tecnológicas para producir los bienes o servicios que se requieren, lo que además admite verificar
Bajo coste, alta densidad, alta velocidad, bajo consumo de energía y alta fiabilidad.
 There are no translations available. La necesidad de trasladar grandes cantidades de información de un equipo informático a otro, ha hecho que la demanda de pequeñas unidades de almacenamiento aumente
There are no translations available. La necesidad de trasladar grandes cantidades de información de un equipo informático a otro, ha hecho que la demanda de pequeñas unidades de almacenamiento aumente
J.J. EMERPLAN SEGURIDAD S.L. PROTECCIÓN CONTRA INCENDIOS CENTRALES
 ABCDE J.J. EMERPLAN SEGURIDAD S.L. PROTECCIÓN CONTRA INCENDIOS CENTRALES Es el equipo de control dende se planifica la operatividad de la instalación. Sus partes básicas son: Un microprocesador, que gestiona
ABCDE J.J. EMERPLAN SEGURIDAD S.L. PROTECCIÓN CONTRA INCENDIOS CENTRALES Es el equipo de control dende se planifica la operatividad de la instalación. Sus partes básicas son: Un microprocesador, que gestiona
Tarjeta Principal. Disco Duro. Memoria RAM. Procesador. Fuente de Poder. Tarjetas de Expansión. Jair Acosta Núñez
 Tarjeta Principal Disco Duro Memoria RAM Procesador Fuente de Poder Tarjetas de Expansión Jair Acosta Núñez También se le puede llamar Board, Mainboard, MotherBoard y Tarjeta Madre. Es una tarjeta interna
Tarjeta Principal Disco Duro Memoria RAM Procesador Fuente de Poder Tarjetas de Expansión Jair Acosta Núñez También se le puede llamar Board, Mainboard, MotherBoard y Tarjeta Madre. Es una tarjeta interna
Tipos de instalaciones
 Tipos de instalaciones Existen este infinidad de configuraciones, pero como técnicos debemos referirnos a las normalizadas por la NTE, la cual diferencia cinco tipos basados en número de circuitos y programas,
Tipos de instalaciones Existen este infinidad de configuraciones, pero como técnicos debemos referirnos a las normalizadas por la NTE, la cual diferencia cinco tipos basados en número de circuitos y programas,
Actividad 4: Comunicación entre PLC s vía Ethernet
 Actividad 4: Comunicación entre PLC s vía Ethernet 1.- Listado de materiales: PC con Tarjeta de red 3com o similar. 2 PLC Omrom CJ1M CPU11 ETN Estos autómatas llevan integrada la tarjeta de comunicaciones
Actividad 4: Comunicación entre PLC s vía Ethernet 1.- Listado de materiales: PC con Tarjeta de red 3com o similar. 2 PLC Omrom CJ1M CPU11 ETN Estos autómatas llevan integrada la tarjeta de comunicaciones
CONTROL LÒGICO PROGRAMABLE (PLC s) Instructor : Ing. JULIO CÉSAR BEDOYA PINO
 Instructor : Ing. JULIO CÉSAR BEDOYA PINO") CONTROL LÒGICO PROGRAMABLE (PLC s) Instructor : Ing. JULIO CÉSAR BEDOYA PINO CONTENIDO AUTOMATISMO OPCIONES TECNOLÓGICAS PLC VENTAJAS Y DESVENTAJAS ESTRUCTURA DE LOS PLC`s DE QUE SE COMPONE UN PLC? CONTENIDO
CONTROL LÒGICO PROGRAMABLE (PLC s) Instructor : Ing. JULIO CÉSAR BEDOYA PINO CONTENIDO AUTOMATISMO OPCIONES TECNOLÓGICAS PLC VENTAJAS Y DESVENTAJAS ESTRUCTURA DE LOS PLC`s DE QUE SE COMPONE UN PLC? CONTENIDO
Gestión digital sencilla de controladores de fuentes de alimentación analógicas
 COMENTARIO TECNICO Gestión digital sencilla de controladores de fuentes de alimentación analógicas Por Josh Mandelcorn, miembro del equipo técnico de Texas Instruments Normalmente, el control digital de
COMENTARIO TECNICO Gestión digital sencilla de controladores de fuentes de alimentación analógicas Por Josh Mandelcorn, miembro del equipo técnico de Texas Instruments Normalmente, el control digital de
Sistemas de Computadoras Índice
 Sistemas de Computadoras Índice Concepto de Computadora Estructura de la Computadora Funcionamiento de la Computadora Historia de las Computadoras Montando una Computadora Computadora Un sistema de cómputo
Sistemas de Computadoras Índice Concepto de Computadora Estructura de la Computadora Funcionamiento de la Computadora Historia de las Computadoras Montando una Computadora Computadora Un sistema de cómputo
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION
 CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
Trabajo 3. PROTOCOLOS DE COMUNICACIÓN SERIAL INDUSTRIALES Edwin Gilberto Carreño Lozano, Código: 2090454.
 Trabajo 3. PROTOCOLOS DE COMUNICACIÓN SERIAL INDUSTRIALES Edwin Gilberto Carreño Lozano, Código: 2090454. I. OBJETIVO Hacer un resumen acerca de los protocolos RS232, RS485, RS422 y HART; protocolos de
Trabajo 3. PROTOCOLOS DE COMUNICACIÓN SERIAL INDUSTRIALES Edwin Gilberto Carreño Lozano, Código: 2090454. I. OBJETIVO Hacer un resumen acerca de los protocolos RS232, RS485, RS422 y HART; protocolos de
Seminario Electrónico de Soluciones Tecnológicas sobre Content Networking
 Seminario Electrónico de Soluciones Tecnológicas sobre Content Networking 1 de 13 Seminario Electrónico de Soluciones Tecnológicas sobre Content Networking 3 Bienvenida. 4 Objetivos. 5 Soluciones comerciales
Seminario Electrónico de Soluciones Tecnológicas sobre Content Networking 1 de 13 Seminario Electrónico de Soluciones Tecnológicas sobre Content Networking 3 Bienvenida. 4 Objetivos. 5 Soluciones comerciales
TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO
 TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO Introducción.- Asanza,V 1 ; Laica,J 1 ; Paillacho,D 1 1. Centro de Visión y Robotica {vasanza, jlaica, dpailla} @fiec.espol.edu.ec Un
TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO Introducción.- Asanza,V 1 ; Laica,J 1 ; Paillacho,D 1 1. Centro de Visión y Robotica {vasanza, jlaica, dpailla} @fiec.espol.edu.ec Un
Central de incendios convencional Serie 500 Más fácil, imposible
 Central de incendios convencional Serie 500 Más fácil, imposible 2 Una central de incendios fácil de instalar, configurar, mantener y usar. Pantalla LCD con indicación de estado para todas las zonas de
Central de incendios convencional Serie 500 Más fácil, imposible 2 Una central de incendios fácil de instalar, configurar, mantener y usar. Pantalla LCD con indicación de estado para todas las zonas de
4. Programación Paralela
 4. Programación Paralela La necesidad que surge para resolver problemas que requieren tiempo elevado de cómputo origina lo que hoy se conoce como computación paralela. Mediante el uso concurrente de varios
4. Programación Paralela La necesidad que surge para resolver problemas que requieren tiempo elevado de cómputo origina lo que hoy se conoce como computación paralela. Mediante el uso concurrente de varios
podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que el
 CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
TEMA 2 Componentes y estructura de una red de telecomunicación.
 TEMA 2 Componentes y estructura de una red de telecomunicación. 1. Modelo para las telecomunicaciones Las redes de telecomunicación constituyen la infraestructura básica de transporte para el intercambio
TEMA 2 Componentes y estructura de una red de telecomunicación. 1. Modelo para las telecomunicaciones Las redes de telecomunicación constituyen la infraestructura básica de transporte para el intercambio
La central reproduce un sonido largo si los datos de configuración son almacenados de forma correcta, y dos sonidos cortos si hay un error.
 Programación Básica de Alarma GSM Última modificación: 15 de Octubre de 2013 Antes de nada, queremos darle las gracias por adquirir en zoominformatica.com este producto, esperamos que cubra todas sus expectativas
Programación Básica de Alarma GSM Última modificación: 15 de Octubre de 2013 Antes de nada, queremos darle las gracias por adquirir en zoominformatica.com este producto, esperamos que cubra todas sus expectativas
ACTIVIDAD No. 2 REPASO DE REDES INFORMATICAS
 ACTIVIDAD No. 2 REPASO DE REDES INFORMATICAS GRADO 11 Nombre(s) y Apellidos: Angie Karolinne Pinilla Castro Documento: 97032416270 FICHA NÚMERO : 2 COLEGIO : Instituto Madre del Buen Consejo FECHA: 23/04/2014
ACTIVIDAD No. 2 REPASO DE REDES INFORMATICAS GRADO 11 Nombre(s) y Apellidos: Angie Karolinne Pinilla Castro Documento: 97032416270 FICHA NÚMERO : 2 COLEGIO : Instituto Madre del Buen Consejo FECHA: 23/04/2014
ESTUDIO DEL SISTEMA ESTÁTICO DE PROTECCIÓN DE UNA TURBINA A GAS
 ESTUDIO DEL SISTEMA ESTÁTICO DE PROTECCIÓN DE UNA TURBINA A GAS Patricio León Alvarado 1, Eduardo León Castro 2 1 Ingeniero Eléctrico en Potencia 2000 2 Director de Tesis. Postgrado en Ingeniería Eléctrica
ESTUDIO DEL SISTEMA ESTÁTICO DE PROTECCIÓN DE UNA TURBINA A GAS Patricio León Alvarado 1, Eduardo León Castro 2 1 Ingeniero Eléctrico en Potencia 2000 2 Director de Tesis. Postgrado en Ingeniería Eléctrica
Laboratorio III de Sistemas de Telecomunicaciones Departamento de Telemática
 Proyecto: Interoperabilidad entre una Red de Telefonía IP y una red de Radio VHF Objetivos Lograr la interoperabilidad de clientes de VoIP con clientes de Radio VHF Implementar el servicio de Call Center
Proyecto: Interoperabilidad entre una Red de Telefonía IP y una red de Radio VHF Objetivos Lograr la interoperabilidad de clientes de VoIP con clientes de Radio VHF Implementar el servicio de Call Center
DEFINICIONES EN CONTROL AUTOMÁTICO
 Universidad de Santiago de Chile Facultad de Ingeniería Departamento de Ingeniería Eléctrica DEFINICIONES EN CONTROL AUTOMÁTICO Oscar Páez Rivera Profesor DEFINICIONES BÁSICAS: Las definiciones que siguen
Universidad de Santiago de Chile Facultad de Ingeniería Departamento de Ingeniería Eléctrica DEFINICIONES EN CONTROL AUTOMÁTICO Oscar Páez Rivera Profesor DEFINICIONES BÁSICAS: Las definiciones que siguen
EQUIPO DE ALARMAS CENTRALIZADO HMD DATA
 EQUIPO DE ALARMAS CENTRALIZADO HMD DATA 2000 HUELTRIC, S.L. C\ Arqueólogo Garay de Anduaga, nº12 21004 Huelva España Tfno.: +34 959.252.671 Tfno. y Fax: +34 959.282.122 e-mail: hueltric@hueltric.es C.I.F.:
EQUIPO DE ALARMAS CENTRALIZADO HMD DATA 2000 HUELTRIC, S.L. C\ Arqueólogo Garay de Anduaga, nº12 21004 Huelva España Tfno.: +34 959.252.671 Tfno. y Fax: +34 959.282.122 e-mail: hueltric@hueltric.es C.I.F.:
INTERRUPCIONES. La comunicación asíncrona de los sistemas periféricos con la CPU, en ambos sentidos, se puede establecer de dos maneras fundamentales:
 INTERRUPCIONES La comunicación asíncrona de los sistemas periféricos con la CPU, en ambos sentidos, se puede establecer de dos maneras fundamentales: a)consultas (POLLING): Se comprueban cíclicamente,
INTERRUPCIONES La comunicación asíncrona de los sistemas periféricos con la CPU, en ambos sentidos, se puede establecer de dos maneras fundamentales: a)consultas (POLLING): Se comprueban cíclicamente,
Memoria La memoria es la parte del ordenador en la que se guardan o almacenan los programas (las instrucciones y los datos).
.") Memoria La memoria es la parte del ordenador en la que se guardan o almacenan los programas (las instrucciones y los datos). Memoria Típica. Los datos almacenados en memoria tienen que pasar, en un momento
Memoria La memoria es la parte del ordenador en la que se guardan o almacenan los programas (las instrucciones y los datos). Memoria Típica. Los datos almacenados en memoria tienen que pasar, en un momento
Figura 1 Fotografía de varios modelos de multímetros
 El Multímetro El multímetro ó polímetro es un instrumento que permite medir diferentes magnitudes eléctricas. Así, en general, todos los modelos permiten medir: - Tensiones alternas y continuas - Corrientes
El Multímetro El multímetro ó polímetro es un instrumento que permite medir diferentes magnitudes eléctricas. Así, en general, todos los modelos permiten medir: - Tensiones alternas y continuas - Corrientes
La Instrumentación Tradicional:
 Prof. Ing. Juan Suárez JTP. Ing. Guillermo Murcia ATP. Ing. Jorge Strack jsuarez@fi.mdp.edu.ar gjmurcia@fi.mdp.edu.ar jlstrack@fi.mdp.edu.ar La Instrumentación Tradicional: Cuando se habla de instrumentos
Prof. Ing. Juan Suárez JTP. Ing. Guillermo Murcia ATP. Ing. Jorge Strack jsuarez@fi.mdp.edu.ar gjmurcia@fi.mdp.edu.ar jlstrack@fi.mdp.edu.ar La Instrumentación Tradicional: Cuando se habla de instrumentos
CAPITULO 3. SENSOR DE TEMPERATURA
 CAPITULO 3. SENSOR DE TEMPERATURA Este sensor deberá detectar los cambios de temperatura como función de la altitud, y fricción con el aire. Al igual que en los acelerómetros, poco se dispone de datos
CAPITULO 3. SENSOR DE TEMPERATURA Este sensor deberá detectar los cambios de temperatura como función de la altitud, y fricción con el aire. Al igual que en los acelerómetros, poco se dispone de datos
Reprogramación de módulos de control
 Reprogramación de módulos de control Componentes de un computador. 1)Bloque de Entrada: Se denomina bloque de entrada a todos los circuitos que se encuentran como receptores de las diferentes señales que
Reprogramación de módulos de control Componentes de un computador. 1)Bloque de Entrada: Se denomina bloque de entrada a todos los circuitos que se encuentran como receptores de las diferentes señales que
M ANUAL DE U SUARIO M ONITOR DE A REA M ODELO MRA-22. Página 1
 M ANUAL DE U SUARIO M ONITOR DE A REA M ODELO MRA-22 Página 1 Índice Página 1. Introducción... 3 2. Principio de funcionamiento... 3 3. Diagrama en Bloques... 4 4. Especificaciones Técnicas... 5 5. Modo
M ANUAL DE U SUARIO M ONITOR DE A REA M ODELO MRA-22 Página 1 Índice Página 1. Introducción... 3 2. Principio de funcionamiento... 3 3. Diagrama en Bloques... 4 4. Especificaciones Técnicas... 5 5. Modo
Bus AS-i. Actuator/Sensor-Interface. 1 M.P.M. y F.P.M. DEPTO.ELECTRICIDAD-C.I.P. ETI Tudela
 Bus AS-i Actuator/Sensor-nterface 1 Pirámide de automatización. 2 AS-i funcionando. 3 Un cable en lugar de muchos 4 Características principales: deal para la interconexión de sensores y actuadores binarios.
Bus AS-i Actuator/Sensor-nterface 1 Pirámide de automatización. 2 AS-i funcionando. 3 Un cable en lugar de muchos 4 Características principales: deal para la interconexión de sensores y actuadores binarios.
Elementos requeridos para crearlos (ejemplo: el compilador)
") Generalidades A lo largo del ciclo de vida del proceso de software, los productos de software evolucionan. Desde la concepción del producto y la captura de requisitos inicial hasta la puesta en producción
Generalidades A lo largo del ciclo de vida del proceso de software, los productos de software evolucionan. Desde la concepción del producto y la captura de requisitos inicial hasta la puesta en producción
Termostato electrónico con el PIC16F872
 Termostato electrónico con el PIC16F872 La temperatura es una de las variables físicas que más le ha preocupado a la humanidad. El termómetro de mercurio es quizás el instrumento más conocido para medir
Termostato electrónico con el PIC16F872 La temperatura es una de las variables físicas que más le ha preocupado a la humanidad. El termómetro de mercurio es quizás el instrumento más conocido para medir
SECCION 0: DESCRIPCIÓN DEL PRODUCTO
 SECCION 0: DESCRIPCIÓN DEL PRODUCTO Descripción del Producto Pág.:1 de 11 CONTENIDO CONTENIDO... 2 1. DESCRIPCIÓN GENERAL... 3 1.1. Pantalla LCD... 4 1.2. Teclado... 5 1.3. Impresora... 6 2. DESCRIPCIÓN
SECCION 0: DESCRIPCIÓN DEL PRODUCTO Descripción del Producto Pág.:1 de 11 CONTENIDO CONTENIDO... 2 1. DESCRIPCIÓN GENERAL... 3 1.1. Pantalla LCD... 4 1.2. Teclado... 5 1.3. Impresora... 6 2. DESCRIPCIÓN
Departamento técnico. Guía rápida CC-LINK. Autómatas serie Q con variadores FR-E 1 / 33
 1 Posibilidades de la red CC_Link...2 2 Cableado tarjetas CC_Link...3 2.1 Distancias...3 2.2 Características del cable...4 2.3 Conexionado del cable en los bornes...5 3 Configuración tarjeta variadores
1 Posibilidades de la red CC_Link...2 2 Cableado tarjetas CC_Link...3 2.1 Distancias...3 2.2 Características del cable...4 2.3 Conexionado del cable en los bornes...5 3 Configuración tarjeta variadores
INTRODUCCIÓN. En el mundo actual, el manejo y acceso de la información para tenerla y manejarla en el
 INTRODUCCIÓN Antecedentes En el mundo actual, el manejo y acceso de la información para tenerla y manejarla en el lugar y momento adecuados se ha hecho esencial para poder ser un profesional o empresa
INTRODUCCIÓN Antecedentes En el mundo actual, el manejo y acceso de la información para tenerla y manejarla en el lugar y momento adecuados se ha hecho esencial para poder ser un profesional o empresa
5. Despliegue en la PC
 5 DESPLIEGUE EN LA PC 62 5.1 Conexión a la PC por medio de la tarjeta de audio La adquisición de señales analógicas es un trabajo que cada vez se hace más necesario en todos los campos relacionados con
5 DESPLIEGUE EN LA PC 62 5.1 Conexión a la PC por medio de la tarjeta de audio La adquisición de señales analógicas es un trabajo que cada vez se hace más necesario en todos los campos relacionados con
TARJETA MADRE y sus PARTES
 TARJETA MADRE y sus PARTES La tarjeta madre Es el componente principal de un computador personal. Debido a que todos los demás grupos de componentes y dispositivos periféricos son controlados a través
TARJETA MADRE y sus PARTES La tarjeta madre Es el componente principal de un computador personal. Debido a que todos los demás grupos de componentes y dispositivos periféricos son controlados a través
Soluciones profesionales de videoanálisis
 Soluciones profesionales de videoanálisis Vigilancia automática de cámaras de seguridad El sistema de videoanálisis de Davantis ha sido homologado por el gobierno británico, recibiendo la calificación
Soluciones profesionales de videoanálisis Vigilancia automática de cámaras de seguridad El sistema de videoanálisis de Davantis ha sido homologado por el gobierno británico, recibiendo la calificación
Encuesta sobre utilización de la microelectrónica en la Argentina
 Encuesta sobre utilización de la microelectrónica en la Argentina Los dispositivos microelectrónicos forman el corazón de todo sistema electrónico de nuestros días. En ellos los circuitos alcanzan las
Encuesta sobre utilización de la microelectrónica en la Argentina Los dispositivos microelectrónicos forman el corazón de todo sistema electrónico de nuestros días. En ellos los circuitos alcanzan las
Contenido. MANUAL DE USO E INSTALACIÓN DLC Detector de línea cortada Página 1 de 13
 DLC Detector de línea cortada Página 1 de 13 Contenido 1 Introducción DLC... 2 2 Funcionamiento... 2 3 Instalación... 3 4 Combinando con Reductores de flujo... 3 5 Mantenimiento... 5 6 Configuración Alarmas
DLC Detector de línea cortada Página 1 de 13 Contenido 1 Introducción DLC... 2 2 Funcionamiento... 2 3 Instalación... 3 4 Combinando con Reductores de flujo... 3 5 Mantenimiento... 5 6 Configuración Alarmas
Reloj Rei-4000 para Control de Tiempo y Asistencia
 Reloj REI-4000 para Control de Tiempo y Asistencia Reloj Electrónico Inteligente para Control de Tiempo y Asistencia El REI-4000 es un completo y eficaz Reloj para Control de Tiempo y Asistencia. Se adapta
Reloj REI-4000 para Control de Tiempo y Asistencia Reloj Electrónico Inteligente para Control de Tiempo y Asistencia El REI-4000 es un completo y eficaz Reloj para Control de Tiempo y Asistencia. Se adapta
La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales.
 La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales. La instalación de aerogeneradores en entornos urbanos requiere la implementación de importantes medidas
La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales. La instalación de aerogeneradores en entornos urbanos requiere la implementación de importantes medidas
PORTAFOLIO DE SERVICIOS INSMEDCONT N M I Y
 PORTAFOLIO DE SERVICIOS INSMEDCONT INSTRU ME NTA CIO N M I ED CION Y C O N T R OL INSMEDCONT Nace en 1997 como una respuesta a la necesidad de mejorar la calidad y aumentar la productividad, disminuyendo
PORTAFOLIO DE SERVICIOS INSMEDCONT INSTRU ME NTA CIO N M I ED CION Y C O N T R OL INSMEDCONT Nace en 1997 como una respuesta a la necesidad de mejorar la calidad y aumentar la productividad, disminuyendo
2.- PLATAFORMA ARDUINO (HARDWARE)
") 2.- PLATAFORMA ARDUINO (HARDWARE) La plataforma Arduino es una plataforma open-hardware basada en una sencilla placa con entradas y salidas (E/S), analógicas y digitales. El elemento principal el microcontrolador
2.- PLATAFORMA ARDUINO (HARDWARE) La plataforma Arduino es una plataforma open-hardware basada en una sencilla placa con entradas y salidas (E/S), analógicas y digitales. El elemento principal el microcontrolador
Detectores. de formalina. Control de la formalina para garantizar el cumplimiento del valor límite de exposición en el puesto de trabajo (TLV)
") Detectores de formalina Control de la formalina para garantizar el cumplimiento del valor límite de exposición en el puesto de trabajo (TLV) * El valor LEP-VLA-EC para el formaldehído es 0,3 ppm (0,37
Detectores de formalina Control de la formalina para garantizar el cumplimiento del valor límite de exposición en el puesto de trabajo (TLV) * El valor LEP-VLA-EC para el formaldehído es 0,3 ppm (0,37
App para realizar consultas al Sistema de Información Estadística de Castilla y León
 App para realizar consultas al Sistema de Información Estadística de Castilla y León Jesús M. Rodríguez Rodríguez rodrodje@jcyl.es Dirección General de Presupuestos y Estadística Consejería de Hacienda
App para realizar consultas al Sistema de Información Estadística de Castilla y León Jesús M. Rodríguez Rodríguez rodrodje@jcyl.es Dirección General de Presupuestos y Estadística Consejería de Hacienda
La presente tesis pretende que los estudiantes observen la teoría de las acciones de control
 CAPÍTULO V. CONCLUSIONES. La presente tesis pretende que los estudiantes observen la teoría de las acciones de control de forma virtual al mismo tiempo analicen físicamente los sistemas electrónicos cuando
CAPÍTULO V. CONCLUSIONES. La presente tesis pretende que los estudiantes observen la teoría de las acciones de control de forma virtual al mismo tiempo analicen físicamente los sistemas electrónicos cuando
ANTENAS: Teledistribución y televisión por cable
 5.1 INTRODUCCIÓN A LA TELEDISTRIBUCIÓN La teledistribución o CATV, podemos considerarla como una gran instalación colectiva, con algunos servicios adicionales que puede soportar y que conectará por cable
5.1 INTRODUCCIÓN A LA TELEDISTRIBUCIÓN La teledistribución o CATV, podemos considerarla como una gran instalación colectiva, con algunos servicios adicionales que puede soportar y que conectará por cable
Todos los datos de medición. Siempre disponibles. En cada dispositivo. El sistema de registro de datos testo Saveris 2. Análisis e informes
 Análisis e informes Refrigerador 1 14/09/2014 hasta 16/09/2014 Evaluación gráfica 14/09/2014 15/09/2014 16/09/2014 Registrador 1 ( C) Registrador 2 ( C) Registrador 3 ( C) Presentación en tabla Alarmas
Análisis e informes Refrigerador 1 14/09/2014 hasta 16/09/2014 Evaluación gráfica 14/09/2014 15/09/2014 16/09/2014 Registrador 1 ( C) Registrador 2 ( C) Registrador 3 ( C) Presentación en tabla Alarmas