DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ
|
|
|
- Francisco Javier Valverde Palma
- hace 8 años
- Vistas:
Transcripción

1 DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ PROYECTO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO AUTOMOTRIZ AUTORES: VELASCO ULCO VÍCTOR MANUEL PILICITA CAIZA EDISON ENRIQUE DIRECTOR: ING. SALAZAR FREDDY CODIRECTOR: ING. QUIROZ JOSÉ LATACUNGA, DICIEMBRE 2014

 DE DOS RUEDAS EN PARALELO")
2 TEMA: DISEÑO Y CONSTRUCCIÓN DE UN VEHÍCULO ELÉCTRICO AUTOBALANCEADO PERSONAL (VEAP) DE DOS RUEDAS EN PARALELO ESTILO SEGWAY


3 Planteamiento del problema

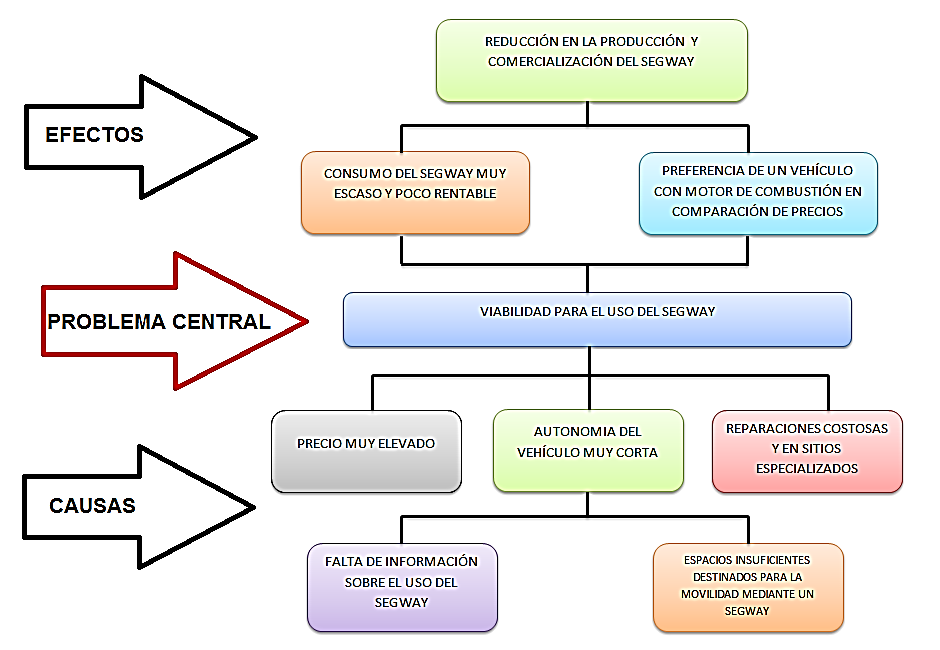
4

5 JUSTIFICACIÓN E IMPORTANCIA El desarrollo de este tema aportará a la iniciativa de motivar a la creación de soluciones verdes de transporte personal que desafíen lo convencional, logrando así el cuidado del medioambiente, esto combinado con una sólida adaptación a las necesidades funcionales de las personas mejorando su productividad y reduciendo sus costos, permitiéndole ir más lejos, moverse más rápidamente y cargar más cosas o peso de lo habitual, donde se verá reflejada la aplicación teórica y práctica de los conocimientos adquiridos durante la carrera de ingeniería, comprobándose todos los principios que se estudiaron en las mismas..

6 OBJETIVO GENERAL Diseñar y construir un vehículo eléctrico autobalanceado personal (VEAP) de dos ruedas en paralelo estilo Segway.

7 OBJETIVOS ESPECÍFICOS Investigar y determinar el principio de funcionamiento de los transportadores personales tipo Segway, los componentes utilizados y autonomía que adquieren este tipo de vehículo. Realizar el diseño del modelo estructural del VEAP y los requerimientos de los componentes que serán implementados en el vehículo. Ejecutar la construcción del VEAP mediante el ensamblaje de componentes mecánicos y eléctricos con los que contará el proyecto. Efectuar las pruebas de funcionamiento del VEAP luego de su ensamble completo para garantizar la seguridad de uso del mismo.

8 INTRODUCCIÓN En el año 2001, el empresario e inventor estadounidense Dean Kamen presentó en sociedad su nueva creación: un dispositivo de transporte en base a dos ruedas independientes sobre un mismo eje, el cual era capaz de autobalancearse con una persona sobre él. El concepto, bautizado como Segway.

9 MODELO SEGWAY i2 SEGWAY x2 Peso total de la máquina 47 kg 54,4 kg Velocidad máxima 20 km/h 20 km/h Alimentación Baterías de ion-litio Baterías de ion-litio Dimensiones de baterías 35,7 x 19x8,2 cm 35,7 x 19x8,2 cm Peso de las baterías 10,3 kg 10,3 kg Autonomía baterías De 26 a 39 km De 14 a 19 km Largo y ancho de la máquina 65 x 63 cm 67 x 84 cm Tamaño de neumático 48.3 cm 53.3 cm Tamaño de bases 48 x 63 cm 67 x 84 cm Motores Brushless Brushless Precio en Ecuador $ 7700 $ 10000

10 CAPITULO II FUNDAMENTACIÓN TEÓRICA

11 DINÁMICA DE LA ESTABILIZACIÓN El principio del proyecto basa su diseño en el péndulo invertido

12 El aspecto más sorprendente del Segway es su capacidad para equilibrarse, para entender de una mejor manera se hará una analogía con el ser humano. Cuando el ser humano se pone de pie y se inclina hacia delante, de manera que se pierda el equilibrio, este probablemente no se caerá de cara debido a que el cerebro sabe que está desequilibrado porque el líquido en el oído se desplaza, así que hace mover la pierna hacia delante para evitar la caída.


13 El Segway hace casi lo mismo excepto que tiene ruedas en lugar de piernas, un motor en lugar de músculos, una colección de microprocesadores en lugar de un cerebro y un juego de sensores sofisticados para la inclinación en lugar de un sistema de equilibrio del oído interno.

14 Modelado teórico de un vehículo basado en el péndulo invertido Como se aprecia en el modelo de prototipo de la Figura, el agente que induce el movimiento (el motor) tiene una acción directa tanto para el movimiento lineal como para el movimiento angular. En el caso del péndulo invertido clásico, la acción sobre el movimiento angular es sólo consecuencia de la dinámica de los cuerpos.

15


16 La energía cinética total es la suma de la energía cinética del péndulo y la energía cinética de las ruedas, la cual se tendrán en cuenta por separado puesto que en el movimiento de cada una de esas partes intervienen tanto traslación como rotación La energía cinética de las ruedas viene dada por la ecuación Ecuación desarrollada de la energía cinética de las ruedas

17 Las coordenadas del centro de masa del péndulo vienen dadas por las ecuaciones Centro de masa en el eje x Centro de masa en el eje x Derivada del centro de masa del eje x Derivada del centro de masa del eje y Por lo tanto, La energía cinética total será la suma de las calculadas en las ecuaciones y donde se obtiene

18 Para el cálculo de la energía potencial se tomará el eje de giro, coincidente con el de los motores, como el punto de referencia. Las ruedas, por tanto, no se tendrán en cuenta para el cálculo de la misma. La energía potencial del sistema Las ecuaciones que modelan la dinámica del vehículo se obtienen por tanto sustituyendo las ecuaciones

19 Parte operativa La parte operativa de un sistema dinámico controlado, está compuesta por el conjunto (estructura, sensores y actuadores), los cuales están dispuestos en una máquina de manera adecuada para dar soporte a estos y permiten asegurar el perfecto funcionamiento de todo el conjunto

20 El sistema de control del vehículo se puede representar en forma básica como un sistema de control en lazo cerrado como el visto en la figura. Para este caso el sistema controla el ángulo de inclinación del vehículo, controlando el movimiento lineal del vehículo

21 Sensores Son los que permiten hacer la retroalimentación. Es uno de los elementos fundamentales de cualquier sistema de control de lazo cerrado. En el sistema de control referente al presente trabajo, los sensores permiten estimar las distintas variables físicas (inclinación del vehículo) y enviárselas al micro controlador para ejecutar alguna acción de control que ha sido programada previamente y así realizar el control de la planta dinámica
22 Características de selección de sensores Voltaje de alimentación del sensor: Es el voltaje que continuamente debe alimentar el sensor, por tanto la salida en voltios del sensor variara entre 0 y el Vdd, la importancia de esta característica radica que estos sensores son sensibles a sobre voltajes y a posibles daños, Consumo de corriente: La corriente de consumo permite cuantificar cuanta potencia requiere el sensor en el modo activo Rango: Rango de medida del acelerómetro, es el valor máximo de aceleración que puede medir el sensor Sensibilidad: permite obtener la relación entre los voltios entregados por el sensor y la variable física censada Costo: Debido a que el presupuesto es limitado, se seleccionó la mejor opción en cuanto a prestaciones y soporte Disponibilidad: la disponibilidad del sensor se refleja en el costo y el tiempo de espera, los sensores que se encuentren a nivel nacional reducirán los costos de importación
23 El giroscopio El giroscopio es un dispositivo que permite conocer como varía un ángulo en el tiempo, mientras este se encuentra rotando (velocidad angular), con esto es posible determinar la actitud del móvil en el cual se encuentra montado.
24 El acelerómetro Es un sensor que permite conocer la aceleración que se produce al realizarse un movimiento, a lo largo del eje en el cual se esté trabajando. Hay que tomar muy en cuenta que un acelerómetro no mide la aceleración de la gravedad en sí, sino, que mide una magnitud de aceleración en general Hay dos parámetros principales a la hora de escoger el medidor adecuado, los rangos de funcionamiento de temperatura y frecuencia. Otros parámetros importantes pueden ser el tamaño, si tienen más funciones, la resistencia a golpes y por supuesto el precio

25 Primero hay que establecer que el acelerómetro se encuentra unido firmemente a la plataforma, por lo que cuando el vehículo se encuentra paralela a la superficie terrestre, los dos ejes del acelerómetro X y Y también se encontrarán paralelos con respecto a tierra, es decir, perpendiculares a la gravedad Cabeceo con un ángulo Ө en sentido horario Alabeo con un ángulo Ө en sentido horario
26 Selección del sensor usando giroscopio y acelerómetro Tomando como referencia los dos métodos anteriores se aprecia claramente que al usar tanto el giroscopio como el acelerómetro de manera individual, se tienen varios inconvenientes que producen que el resultado deseado tienda a medir error en su magnitud. Debido a estos inconvenientes, surge la necesidad de trabajar con ambos sensores simultáneamente, con el fin de poder tomar las mejores características de cada uno y que a la vez se contrarresten en cierto grado los inconvenientes.
27 MPU-6050 (Unidad de Procesamiento del Movimiento) Para tomar los datos de referencia que en este caso son los parámetros que intervienen en el péndulo invertido para el VEAP se usará el sensor inercial MPU de InvenSense. El principal motivo de la elección de este sensor es que; en un solo chip se integra un giroscopio y un acelerómetro que presenta una sobresaliente linealidad, reduciendo de esta manera significativamente el error de desalineación que se presenta cuando se fusionan los sensores.
28 Actuadores En esta parte se considera el análisis y la selección de los motores ya que es uno de elementos fundamentales del modelo estructural del sistema dinámico, se optó por utilizar motores de corriente continua. Este tipo de motor es muy poco utilizado en el mercado y debido a ello la disponibilidad en el mercado nacional es muy reducida, por lo que hace necesario importarlos, no obstante lo que se pretende con este proyecto es reducir sus costos de fabricación con lo cual se utilizó motores disponibles en el país

29 Unidad controladora de motores Sabertooth dual 60A motor conductor
30 Posicionamiento de interruptores para el modo serial Para la selección de velocidad de transmisión (baud rate) es seleccionada por los interruptores 2 y 4 como se ve en la figura, con un baud de 9600.
31 Sistema de control El sistema desarrollo o placa microcontroladora es la STM32F407VG DISCOVERY. Se trata de una placa de desarrollo basada en el microcontrolador STM32F407VGT6
32 Baterías características a considerar Voltaje Nominal: es el voltaje en las terminales de una celda. Esta tensión varía de una tecnología a otra. Capacidad: se refiere a la cantidad de carga que puede almacenar la batería Autodescarga: es el proceso de descarga que sufren las baterías aun cuando no se utilicen Efectos de la temperatura: debido a la presencia en las baterías de componentes químicos, la temperatura juega un papel importante en el desempeño de éstas, al punto de que afecta notablemente su capacidad, longevidad, tensión de fin de carga, tensión de fin de descarga, auto descarga
33 Equipo auxiliar: cargador de baterías El modelo seleccionado ofrece todas las especificaciones y características necesaria para las especificaciones con las que cuenta las baterías LiPo, cuanta con un circuito de balanceador lo que permite cargar las baterías individualmente por celdas. Puede ser alimentado desde cualquier toma (110 o 220 Vac). Es completamente automático, una vez que las baterías se encuentran cargadas, se pone en modo standby. Su pequeño tamaño y peso ligero hacen extremadamente fácil de transportar.
34 CAPÍTULO III DISEÑO Y CONSTRUCCIÓN DEL VEAP
35 Requerimientos del sistema En el modelo real se tienen los siguientes datos: m: Masa del vehículo: 30kg M: Masa de la persona (péndulo): 70kg g: Aceleración de la gravedad: 9.8m/s2 l: Altura del centro de masa con persona: 95cm aproximadamente (Determinado mediante simulación en Autodesk Inventor).
36 Requerimiento de etapa de potencia de motores V= velocidad lineal
37 coeficiente de fricción coeficiente de rodadura

38 Calculo de fuerza
39 Par nominal de giro
40
41 NPC AmpFlow KING RIGHT MOTOR


42 Requerimientos de espacio para las baterías El tipo de baterías que permite minimizar peso y volumen con buena respuesta en corriente es el basado en polímeros de litio (Li-Po, Lithium polymer).
43 Ruedas del vehículo Se seleccionó como ruedas para el proyecto, aquellas que no demandaran mucho presupuesto y que sean de fácil acceso a la hora de su adquisición, en torno a esto se utilizó ruedas comunes comercializadas en cualquier centro ferretero
44 Diseño y construcción estructural del VEAP
45 Bastidor del vehículo
46 Mecanismo barra de dirección
47 Ensamblaje de transmisión de movimiento
48 Ensamblaje de mecanismo de dirección al vehículo
49 Ensamble de la caja protectora
50 Diseño estructural del VEAP
51 Ubicación de los componentes electrónicos
52 Ubicación de baterías Li-Po

53 Interruptores de alimentación
54 Interruptores de seguridad
55 Pulsadores de dirección
56 CAPÍTULO IV IMPLEMENTACIÓN DEL SISTEMA DE CONTROL
57 Posición de Equilibrio Error PARÁMETROS DE CONTROL Inclinación SetPoint Velocidad de Inclinación
58 Condiciones de Inicialización del software de control La tarjeta STM32F4 cuenta con una aplicación STM32 ST- LINK_Utility_v3.3.0.exe Permite la conexión para la compilación y programación en el entorno Simulink.
59

60

61
62 Estrategia de control mediante diagramas de flujo/diagrama de boques Simulink
63

64
65
66 MOTOR 1 MOTOR 2 Condición Valor del caracter Valor del caracter Full hacia delante Hacia delante Detener Hacia atrás Full hacia atrás Apagado 0 0
67 No necesita conocer la planta, es decir no se necesita el modelo matemático del cuerpo para determinar sus valores Acción de control Fuzzy Se debe conocer es que acción va a realizar ante la presencia de un determinado error. Asigna valores lingüísticos Grande negativo: -1 Pequeño negativo: -0.5 Cero: 0 Pequeño positivo: 0.5 Grande positivo: 1


68 Acción de control Fuzzy Acción de Derivada del error control Error
69
70
71
72
73 CAPÍTULO V PRUEBAS Y RESULTADOS RANGO DE TRABAJO VOLTAJE DE LAS BATERÍAS AUTONOMÍA TIEMPOS DE CARGA PRUEBAS DE FUNCIONALIDAD COSTOS DEL PROYECTO
74 RANGO DE TRABAJO VOLTAJE DE LAS BATERÍAS RANGO DE TRABAJO PERMITIDO: DE 25,2 V 20 V EN 25, 2 V LA PLATAFORMA TIENDE A VIBRAR EN 20 V LA VELOCIDAD Y FUERZA DEL VEAP DISMINUYE
75 AUTONOMÍA DEL VEAP AUTONOMÍA EN TIEMPO HORAS AUTONOMÍA EN KILOMETRAJE
76 TIEMPOS DE CARGA
77 PRUEBAS DE FUNCONALIDAD
78 COSTOS DEL PROYECTO Desglose de costos de materiales del sistema mecánico Cantidad Descripción Precio Costo total unitario 1 Tubo cuadrado estructural ( metros) 2 Motorreductores King Motors Ruedas neumáticas Adaptador eje rueda Retazos de láminas de tol Conjunto volante/base Tornillos 7/16-24-UNF de longitud 16mm, resistencia 12,9 y cabeza DIN Total de materiales $ 222.5
79 Desglose de costos de materiales eléctricos y electrónicos. Cantidad Descripción Precio Costo total unitario 1 Tarjeta STM32F4 Discovery Sensor MPU Driver Sabertooth 2x Baterías LiPo Cargador de baterías LiPo Borneras Cableado (metros) Cables para protoboard 0, Interruptores Pulsadores 0, Total de materiales $ 561.6
80 Análisis financiero del VEAP Costo de materiales $ 784 Costo de construcción del proyecto $ 20 Costo de ingeniería $ 500 Total $ 1304
81 CONCLUSIONES Se diseñó y construyó un vehículo eléctrico autobalanceado personal (VEAP) de dos ruedas en paralelo estilo Segway, logrando satisfactoriamente el control de estabilidad y darle al vehículo la funcionalidad deseada, de modo que una persona sea capaz de trasladarse de un lugar a otro sin mayor dificultad. La integración y programación de los sistemas electrónicos instalados en el vehículo se ha realizado de manera exitosa, dando lugar, junto con el diseño y construcción, a que se hayan podido realizar la puesta en marcha del vehículo y esté totalmente operativo.
82 Se ejecutó la construcción del VEAP mediante el ensamblaje de componentes mecánicos y eléctricos de los que estaba previsto el proyecto. La construcción mecánica del VEAP requirió de sumo cuidado y de cálculos geométricos que determinaron notablemente el desempeño final del vehículo, y que además intervinieron, activamente, en el proceso de control del vehículo. Se logró establecer una autonomía del VEAP de 4 horas con el uso de dos baterías LiPo, que supera por mucho a los Segway comerciales. Los costos de construcción fueron rotundamente satisfactorios, ya que con el uso de materiales reciclados y adquiridos en el mercado nacional redujo enormemente su valor económico para poder fabricarlos en serie.
83 RECOMENDACIONES Para el desarrollo de un vehículo de este tipo completamente funcional y seguro, se recomienda el uso de la implementación de más sensores sofisticados de tal manera que efectúen el control considerando cada parámetro que pueda afectar a la inestabilidad.. También se debería cambiar el método en que se determina el giro deseado, ya que si bien el volante instalado es bastante intuitivo, es peligroso ya que en una eventual caída, en caso de no soltar uno de los dos lados, el vehículo tenderá a girar sin control.
84 Agregar un tipo de motorreductor diferente y más sofisticado al que se usó en este proyecto, tomando en cuenta características de rpm, torque y potencia Agregar una circuitería que permita utilizar los motores como generadores, en determinados momentos del recorrido, para aprovechar la energía mecánica y convertirla en energía eléctrica, para su posterior uso. Dotar el vehículo con baterías de una tecnología superior que permitan tener una mayor autonomía y un menor tiempo de carga.
85 GRACIAS POR SU ATENCIÓN
SERVOMOTORES. Los servos se utilizan frecuentemente en sistemas de radiocontrol, mecatrónicos y robótica, pero su uso no está limitado a estos.
 SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
Capitulo IV. Comunicación del diseño
 Capitulo IV. Comunicación del diseño 4.1 Ensamble y construcción del cuadricoptero Esta es la última etapa del modelo de diseño a cinco pasos y representa la parte más importante en la cual se conjunta
Capitulo IV. Comunicación del diseño 4.1 Ensamble y construcción del cuadricoptero Esta es la última etapa del modelo de diseño a cinco pasos y representa la parte más importante en la cual se conjunta
ELEL10. Fuerza contraelectromotriz (fcem)
") Los motores de corriente directa transforman la energía eléctrica en energía mecánica. Impulsan dispositivos tales como malacates, ventiladores, bombas, calandrias, prensas, preforadores y carros. Estos
Los motores de corriente directa transforman la energía eléctrica en energía mecánica. Impulsan dispositivos tales como malacates, ventiladores, bombas, calandrias, prensas, preforadores y carros. Estos
La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales.
 La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales. La instalación de aerogeneradores en entornos urbanos requiere la implementación de importantes medidas
La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales. La instalación de aerogeneradores en entornos urbanos requiere la implementación de importantes medidas
El Vehículo Eléctrico
 CAPÍTULO 4 El Vehículo Eléctrico 4.1 INTRODUCCIÓN. Como se mencionó a lo largo del capítulo 1, el sistema se desarrolla sobre un vehículo eléctrico infantil, cuyo funcionamiento difiere, en gran medida,
CAPÍTULO 4 El Vehículo Eléctrico 4.1 INTRODUCCIÓN. Como se mencionó a lo largo del capítulo 1, el sistema se desarrolla sobre un vehículo eléctrico infantil, cuyo funcionamiento difiere, en gran medida,
Una vez descrita la constitución general de un robot, podemos empezar con la
 CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
Proyecto energías limpias. Auto solar Planteamiento del problema.
 Proyecto energías limpias. Auto solar Planteamiento del problema. #40 En la ciudad de México existe un gran problema, que es la contaminación ambiental. México (DF), la capital de la Republica de México
Proyecto energías limpias. Auto solar Planteamiento del problema. #40 En la ciudad de México existe un gran problema, que es la contaminación ambiental. México (DF), la capital de la Republica de México
OPTIMIZACIÓN DEL FACTOR DE POTENCIA y CALIDAD DE LA ENERGÍA
 OPTIMIZACIÓN DEL FACTOR DE POTENCIA y CALIDAD DE LA ENERGÍA Introducción En la gran mayoría de las industrias, hoteles, hospitales, tiendas departamentales, etc. existen gran cantidad de motores; en equipo
OPTIMIZACIÓN DEL FACTOR DE POTENCIA y CALIDAD DE LA ENERGÍA Introducción En la gran mayoría de las industrias, hoteles, hospitales, tiendas departamentales, etc. existen gran cantidad de motores; en equipo
IES Menéndez Tolosa. La Línea de la Concepción. 1 Es posible que un cuerpo se mueva sin que exista fuerza alguna sobre él?
 IES Menéndez Tolosa. La Línea de la Concepción 1 Es posible que un cuerpo se mueva sin que exista fuerza alguna sobre él? Si. Una consecuencia del principio de la inercia es que puede haber movimiento
IES Menéndez Tolosa. La Línea de la Concepción 1 Es posible que un cuerpo se mueva sin que exista fuerza alguna sobre él? Si. Una consecuencia del principio de la inercia es que puede haber movimiento
1.1 EL ESTUDIO TÉCNICO
 1.1 EL ESTUDIO TÉCNICO 1.1.1 Definición Un estudio técnico permite proponer y analizar las diferentes opciones tecnológicas para producir los bienes o servicios que se requieren, lo que además admite verificar
1.1 EL ESTUDIO TÉCNICO 1.1.1 Definición Un estudio técnico permite proponer y analizar las diferentes opciones tecnológicas para producir los bienes o servicios que se requieren, lo que además admite verificar
Control de motores de CC
 Control de motores de CC Control por modulación de ancho de Pulso (PWM) Prof: Bolaños D (versión 1-8-11) Aportes propios y de Internet Uno de los problemas más fundamentales de la robótica es el control
Control de motores de CC Control por modulación de ancho de Pulso (PWM) Prof: Bolaños D (versión 1-8-11) Aportes propios y de Internet Uno de los problemas más fundamentales de la robótica es el control
LOGISTICA TECNOLOGIA E IMPLEMENTACION
 Rack Selectivo Características del Rack Selectivo: La ventaja más notable del Rack Selectivo es su sencilla forma de distribución, ya que ser adaptados a cualquier tipo de carga a almacenar por cantidad
Rack Selectivo Características del Rack Selectivo: La ventaja más notable del Rack Selectivo es su sencilla forma de distribución, ya que ser adaptados a cualquier tipo de carga a almacenar por cantidad
CONVERSIÓN DE AUTO CONVENCIONAL A ELÉCTRICO ORGANIZACIÓN AUTOLIBRE
 CONVERSIÓN DE AUTO CONVENCIONAL A ELÉCTRICO ORGANIZACIÓN AUTOLIBRE La conversión del vehículo convencional a tracción eléctrica consta de diferentes etapas que permiten lograr una correcta transformación
CONVERSIÓN DE AUTO CONVENCIONAL A ELÉCTRICO ORGANIZACIÓN AUTOLIBRE La conversión del vehículo convencional a tracción eléctrica consta de diferentes etapas que permiten lograr una correcta transformación
Introducción a los sistemas de control
 Introducción a los sistemas de control Sistema Un sistema es una combinación de componentes que actúan juntos y realizan un objetivo determinado A un sistema se le puede considerar como una caja negra
Introducción a los sistemas de control Sistema Un sistema es una combinación de componentes que actúan juntos y realizan un objetivo determinado A un sistema se le puede considerar como una caja negra
LEYES DE CONSERVACIÓN: ENERGÍA Y MOMENTO
 LEYES DE CONSERVACIÓN: ENERGÍA Y MOMENTO 1. Trabajo mecánico y energía. El trabajo, tal y como se define físicamente, es una magnitud diferente de lo que se entiende sensorialmente por trabajo. Trabajo
LEYES DE CONSERVACIÓN: ENERGÍA Y MOMENTO 1. Trabajo mecánico y energía. El trabajo, tal y como se define físicamente, es una magnitud diferente de lo que se entiende sensorialmente por trabajo. Trabajo
Capítulo 1 GESTIÓN DE LA ALIMENTACIÓN
 Capítulo 1 GESTIÓN DE LA ALIMENTACIÓN 1 Introducción En un robot autónomo la gestión de la alimentación es fundamental, desde la generación de energía hasta su consumo, ya que el robot será más autónomo
Capítulo 1 GESTIÓN DE LA ALIMENTACIÓN 1 Introducción En un robot autónomo la gestión de la alimentación es fundamental, desde la generación de energía hasta su consumo, ya que el robot será más autónomo
MCBtec Mas información en
 MCBtec Mas información en www.mcbtec.com INTRODUCCIÓN A LA SIMULACION POR ORDENADOR Indice: Objetivo de este texto. Simulación por ordenador. Dinámica y simulación. Ejemplo disparo de un proyectil. Ejemplo
MCBtec Mas información en www.mcbtec.com INTRODUCCIÓN A LA SIMULACION POR ORDENADOR Indice: Objetivo de este texto. Simulación por ordenador. Dinámica y simulación. Ejemplo disparo de un proyectil. Ejemplo
Preguntas y respuestas técnicas sobre motores eléctricos traccionarios.
 Preguntas y respuestas técnicas sobre motores eléctricos traccionarios. Organización Autolibre. Cómo funciona un motor Eléctrico? Un motor eléctrico es un dispositivo que puede producir una fuerza cuando
Preguntas y respuestas técnicas sobre motores eléctricos traccionarios. Organización Autolibre. Cómo funciona un motor Eléctrico? Un motor eléctrico es un dispositivo que puede producir una fuerza cuando
Anteproyecto. Por: Bryan esteban palacio munera. Fabiana Sánchez. INSTITUCIÓN EDUCATIVA JUAN MARÍA CÉSPEDES TECNOLOGÍA E INFORMÁTICA MEDELLIN 2013.
 Anteproyecto Por: Bryan esteban palacio munera Fabiana Sánchez. INSTITUCIÓN EDUCATIVA JUAN MARÍA CÉSPEDES TECNOLOGÍA E INFORMÁTICA MEDELLIN 2013. MARCO TEORICO DE LOS VEHICULOS A BASE DE ELECTRICIDAD (CARROS
Anteproyecto Por: Bryan esteban palacio munera Fabiana Sánchez. INSTITUCIÓN EDUCATIVA JUAN MARÍA CÉSPEDES TECNOLOGÍA E INFORMÁTICA MEDELLIN 2013. MARCO TEORICO DE LOS VEHICULOS A BASE DE ELECTRICIDAD (CARROS
Nombre de la asignatura: Robótica Industrial. Carrera: Ingeniería Electrónica
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Robótica Industrial Carrera: Ingeniería Electrónica Clave de la asignatura: Horas teoría - horas práctica créditos: 3 2 8 2.- HISTORIA DEL PROGRAMA Lugar
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Robótica Industrial Carrera: Ingeniería Electrónica Clave de la asignatura: Horas teoría - horas práctica créditos: 3 2 8 2.- HISTORIA DEL PROGRAMA Lugar
Nuevos materiales (cerámica, metales, polímeros) Lubricantes y aditivos del aceite Sistemas autolubricadores Garantía de calidad.
 Lubricantes y aditivos del aceite Sistemas autolubricadores Garantía de calidad.") Introducción El control de la fricción y del desgaste en piezas móviles de máquinas es un elemento crítico a hacer frente en la industria. Es importante tener datos comparables de análisis obtenidos durante
Introducción El control de la fricción y del desgaste en piezas móviles de máquinas es un elemento crítico a hacer frente en la industria. Es importante tener datos comparables de análisis obtenidos durante
Comparación entre motores rotativos con sinfín y corona, frente a motores lineales en un prototipo industrial
 Comparación entre motores rotativos con sinfín y corona, frente a motores lineales en un prototipo industrial Ing. Marcelo Castelli Lémez Departamento de Ingeniería Eléctrica, Electrónica y Automática
Comparación entre motores rotativos con sinfín y corona, frente a motores lineales en un prototipo industrial Ing. Marcelo Castelli Lémez Departamento de Ingeniería Eléctrica, Electrónica y Automática
CÁLCULO SECCIÓN CABLEADO DE ALIMENTACIÓN
 CÁLCULO SECCIÓN CABLEADO DE ALIMENTACIÓN V 1.0 SEPTIEMBRE 2005 Corriente máxima en el cable (A) CÁLCULO DE LA SECCIÓN MÍNIMA DEL CABLEADO DE ALIMENTACIÓN Longitud del cable en metros 0 1.2 1.2 2.1 2.1
CÁLCULO SECCIÓN CABLEADO DE ALIMENTACIÓN V 1.0 SEPTIEMBRE 2005 Corriente máxima en el cable (A) CÁLCULO DE LA SECCIÓN MÍNIMA DEL CABLEADO DE ALIMENTACIÓN Longitud del cable en metros 0 1.2 1.2 2.1 2.1
ESTUDIO DEL SISTEMA ESTÁTICO DE PROTECCIÓN DE UNA TURBINA A GAS
 ESTUDIO DEL SISTEMA ESTÁTICO DE PROTECCIÓN DE UNA TURBINA A GAS Patricio León Alvarado 1, Eduardo León Castro 2 1 Ingeniero Eléctrico en Potencia 2000 2 Director de Tesis. Postgrado en Ingeniería Eléctrica
ESTUDIO DEL SISTEMA ESTÁTICO DE PROTECCIÓN DE UNA TURBINA A GAS Patricio León Alvarado 1, Eduardo León Castro 2 1 Ingeniero Eléctrico en Potencia 2000 2 Director de Tesis. Postgrado en Ingeniería Eléctrica
Mediciones Eléctricas
 Mediciones Eléctricas Grupos Electrógenos Mediciones Eléctricas Página 1 de 12 Tabla de Contenido Objetivo 1: Medidas de magnitudes eléctricas... 3 Objetivo 2: Generalidades sobre instrumentos de medición...
Mediciones Eléctricas Grupos Electrógenos Mediciones Eléctricas Página 1 de 12 Tabla de Contenido Objetivo 1: Medidas de magnitudes eléctricas... 3 Objetivo 2: Generalidades sobre instrumentos de medición...
Tesis presentada como requisito previo a la obtención del grado de Ingeniero Automotriz
 Tesis presentada como requisito previo a la obtención del grado de Ingeniero Automotriz LUIS OMAR TOAPANTA HEREDIA Director: Ing. FREDDY SALAZAR DIEGO MARCELO NÚÑEZ FIALLOS Codirector: Ing. GUIDO TORRES
Tesis presentada como requisito previo a la obtención del grado de Ingeniero Automotriz LUIS OMAR TOAPANTA HEREDIA Director: Ing. FREDDY SALAZAR DIEGO MARCELO NÚÑEZ FIALLOS Codirector: Ing. GUIDO TORRES
Objetivo General: dar conocer la importancia y el funcionamiento de estos autos eléctricos.
 Carros Eléctricos Planteamiento: son los autos que fueron creados con el fin de proteger el medio ambiente, también evita la contaminación acústica ya que el motor de estos autos no hacen tanto ruido como
Carros Eléctricos Planteamiento: son los autos que fueron creados con el fin de proteger el medio ambiente, también evita la contaminación acústica ya que el motor de estos autos no hacen tanto ruido como
DISEÑO Y CONSTRUCCIÓN DE LOS SISTEMAS DE TRANSMISIÓN Y FRENOS DE UNA TRICICLETA SOLAR
 DISEÑO Y CONSTRUCCIÓN DE LOS SISTEMAS DE TRANSMISIÓN Y FRENOS DE UNA TRICICLETA SOLAR AUTORES: GUANO LUIS JORQUE ABRAHAN DIRECTOR: ING. CASTRO JUAN CODIRECTOR: ING. MANJARRÉS FÉLIX INTRODUCCIÓN En la Universidad
DISEÑO Y CONSTRUCCIÓN DE LOS SISTEMAS DE TRANSMISIÓN Y FRENOS DE UNA TRICICLETA SOLAR AUTORES: GUANO LUIS JORQUE ABRAHAN DIRECTOR: ING. CASTRO JUAN CODIRECTOR: ING. MANJARRÉS FÉLIX INTRODUCCIÓN En la Universidad
 Introducción En los años 60 s y 70 s cuando se comenzaron a utilizar recursos de tecnología de información, no existía la computación personal, sino que en grandes centros de cómputo se realizaban todas
Introducción En los años 60 s y 70 s cuando se comenzaron a utilizar recursos de tecnología de información, no existía la computación personal, sino que en grandes centros de cómputo se realizaban todas
ORIENTACIONES PARA LA MATERIA DE FÍSICA Convocatoria 2010
 ORIENTACIONES PARA LA MATERIA DE FÍSICA Convocatoria 2010 Prueba de Acceso para Mayores de 25 años Para que un adulto mayor de 25 años pueda incorporarse plenamente en los estudios superiores de la Física
ORIENTACIONES PARA LA MATERIA DE FÍSICA Convocatoria 2010 Prueba de Acceso para Mayores de 25 años Para que un adulto mayor de 25 años pueda incorporarse plenamente en los estudios superiores de la Física
CONCEPTOS DE LA FUERZA
 CONCEPTOS DE LA FUERZA PAPEL DE LA FUERZA EN EL RENDIMIENTO DEPORTIVO La mejora de la fuerza es un factor importante en todas las actividades deportivas, y en algunos casos determinantes (en el arbitraje
CONCEPTOS DE LA FUERZA PAPEL DE LA FUERZA EN EL RENDIMIENTO DEPORTIVO La mejora de la fuerza es un factor importante en todas las actividades deportivas, y en algunos casos determinantes (en el arbitraje
LINEAMIENTOS ESTÁNDARES APLICATIVOS DE VIRTUALIZACIÓN
 LINEAMIENTOS ESTÁNDARES APLICATIVOS DE VIRTUALIZACIÓN Tabla de Contenidos LINEAMIENTOS ESTÁNDARES APLICATIVOS DE VIRTUALIZACIÓN... 1 Tabla de Contenidos... 1 General... 2 Uso de los Lineamientos Estándares...
LINEAMIENTOS ESTÁNDARES APLICATIVOS DE VIRTUALIZACIÓN Tabla de Contenidos LINEAMIENTOS ESTÁNDARES APLICATIVOS DE VIRTUALIZACIÓN... 1 Tabla de Contenidos... 1 General... 2 Uso de los Lineamientos Estándares...
TEMA 2. CIRCUITOS ELÉCTRICOS.
 TEMA 2. CIRCUITOS ELÉCTRICOS. 1. INTRODUCCIÓN. A lo largo del presente tema vamos a estudiar los circuitos eléctricos, para lo cual es necesario recordar una serie de conceptos previos tales como la estructura
TEMA 2. CIRCUITOS ELÉCTRICOS. 1. INTRODUCCIÓN. A lo largo del presente tema vamos a estudiar los circuitos eléctricos, para lo cual es necesario recordar una serie de conceptos previos tales como la estructura
DL CH12 Reactor químico combinado
 DL CH12 Reactor químico combinado Introducción La reacción química es la operación unitaria que tiene por objeto distribuir de una forma distinta los átomos de unas moléculas (compuestos reaccionantes
DL CH12 Reactor químico combinado Introducción La reacción química es la operación unitaria que tiene por objeto distribuir de una forma distinta los átomos de unas moléculas (compuestos reaccionantes
CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN. Figura 4.1.Caja Negra. Generar. Sistema de control. Acumular. Figura 4.2. Diagrama de funciones
 CAPÍTULO 4 37 CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN Para diseñar el SGE, lo primero que se necesita es plantear diferentes formas en las que se pueda resolver el problema para finalmente decidir
CAPÍTULO 4 37 CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN Para diseñar el SGE, lo primero que se necesita es plantear diferentes formas en las que se pueda resolver el problema para finalmente decidir
CAPÍTULO 1 Instrumentación Virtual
 CAPÍTULO 1 Instrumentación Virtual 1.1 Qué es Instrumentación Virtual? En las últimas décadas se han incrementado de manera considerable las aplicaciones que corren a través de redes debido al surgimiento
CAPÍTULO 1 Instrumentación Virtual 1.1 Qué es Instrumentación Virtual? En las últimas décadas se han incrementado de manera considerable las aplicaciones que corren a través de redes debido al surgimiento
Entonces el trabajo de la fuerza eléctrica es : =F d (positivo porque la carga se desplaza en el sentido en que actúa la fuerza (de A a B)
") Consideremos la siguiente situación. Una carga Q que genera un campo eléctrico uniforme, y sobre este campo eléctrico se ubica una carga puntual q.de tal manara que si las cargas son de igual signo la
Consideremos la siguiente situación. Una carga Q que genera un campo eléctrico uniforme, y sobre este campo eléctrico se ubica una carga puntual q.de tal manara que si las cargas son de igual signo la
INTRODUCCIÓN. En el mundo actual, el manejo y acceso de la información para tenerla y manejarla en el
 INTRODUCCIÓN Antecedentes En el mundo actual, el manejo y acceso de la información para tenerla y manejarla en el lugar y momento adecuados se ha hecho esencial para poder ser un profesional o empresa
INTRODUCCIÓN Antecedentes En el mundo actual, el manejo y acceso de la información para tenerla y manejarla en el lugar y momento adecuados se ha hecho esencial para poder ser un profesional o empresa
CURSO TALLER PROMOTORES DE AHORRO Y EFICIENCIA DE ENERGÍA ELÉCTRICA
 PROGRAMA INTEGRAL DE ASISTENCIA TÉCNICA Y CAPACITACIÓN PARA LA FORMACIÓN DE ESPECIALISTAS EN AHORRO Y USO EFICIENTE DE ENERGÍA ELÉCTRICA DE GUATEMALA CURSO TALLER PROMOTORES DE AHORRO Y EFICIENCIA DE ENERGÍA
PROGRAMA INTEGRAL DE ASISTENCIA TÉCNICA Y CAPACITACIÓN PARA LA FORMACIÓN DE ESPECIALISTAS EN AHORRO Y USO EFICIENTE DE ENERGÍA ELÉCTRICA DE GUATEMALA CURSO TALLER PROMOTORES DE AHORRO Y EFICIENCIA DE ENERGÍA
De acuerdo con sus características podemos considerar tres tipos de vectores:
 CÁLCULO VECTORIAL 1. ESCALARES Y VECTORES 1.1.-MAGNITUDES ESCALARES Y VECTORIALES Existen magnitudes físicas cuyas cantidades pueden ser expresadas mediante un número y una unidad. Otras, en cambio, requieren
CÁLCULO VECTORIAL 1. ESCALARES Y VECTORES 1.1.-MAGNITUDES ESCALARES Y VECTORIALES Existen magnitudes físicas cuyas cantidades pueden ser expresadas mediante un número y una unidad. Otras, en cambio, requieren
CAPITULO 4: LA UPS SOLAR Y SISTEMAS PARECIDOS EN EL MERCADO
 CAPÍTULO 4 46 CAPITULO 4: LA UPS SOLAR Y SISTEMAS PARECIDOS EN EL MERCADO 4.1 Introducción Este es el capítulo donde se presenta el proyecto, es decir, la UPS Solar que se ha diseñado junto con su explicación.
CAPÍTULO 4 46 CAPITULO 4: LA UPS SOLAR Y SISTEMAS PARECIDOS EN EL MERCADO 4.1 Introducción Este es el capítulo donde se presenta el proyecto, es decir, la UPS Solar que se ha diseñado junto con su explicación.
Unidad 7 Aplicación de máximos y mínimos
 Unidad 7 Aplicación de máimos y mínimos Objetivos Al terminar la unidad, el alumno: Interpretará el concepto de ingreso y costos marginal. Aplicará la función de ingresos en problemas de maimización. Aplicará
Unidad 7 Aplicación de máimos y mínimos Objetivos Al terminar la unidad, el alumno: Interpretará el concepto de ingreso y costos marginal. Aplicará la función de ingresos en problemas de maimización. Aplicará
Diseño y Construcción de un Sistema de Posicionamiento Lineal
 Diseño y Construcción de un Sistema de Posicionamiento Lineal Nivel superior David I. Rosas Almeida 1 Universidad Autónoma de Baja California, Blvd. Benito Juárez s/n, Mexicali, B. C., México drosas@yaqui.mxl.uabc.mx
Diseño y Construcción de un Sistema de Posicionamiento Lineal Nivel superior David I. Rosas Almeida 1 Universidad Autónoma de Baja California, Blvd. Benito Juárez s/n, Mexicali, B. C., México drosas@yaqui.mxl.uabc.mx
Supongamos que se tiene que montar un pilar de referencia"a" localizado en un plano de replanteo.
 EJEMPLOS DE SELECCIÓN DE GRÚAS TELESCÓPICAS Ejemplo 1: selección de la grúa para el montaje de pilares. Supongamos que se tiene que montar un pilar de referencia"a" localizado en un plano de replanteo.
EJEMPLOS DE SELECCIÓN DE GRÚAS TELESCÓPICAS Ejemplo 1: selección de la grúa para el montaje de pilares. Supongamos que se tiene que montar un pilar de referencia"a" localizado en un plano de replanteo.
Osciloscopio Funciones
 Uso del osciloscopio para determinar las formas de onda Uno de los procedimientos para realizar diagnósticos acertados, en las reparaciones automotrices, es el buen uso del osciloscopio. Este instrumento
Uso del osciloscopio para determinar las formas de onda Uno de los procedimientos para realizar diagnósticos acertados, en las reparaciones automotrices, es el buen uso del osciloscopio. Este instrumento
Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9
 Por Guillermo Martín Díaz Alumno de: 1º Ingeniería Informática Curso 2005/2006 ËQGLFH Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9 2 0RWRUHVGH&RUULHQWHFRQWLQXD Son los mas
Por Guillermo Martín Díaz Alumno de: 1º Ingeniería Informática Curso 2005/2006 ËQGLFH Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9 2 0RWRUHVGH&RUULHQWHFRQWLQXD Son los mas
Funcionamiento y Selección de Plataformas Niveladoras para Docks de Carga
 Funcionamiento y Selección de Plataformas Niveladoras para Docks de Carga Hoy en día, debido al alto costo de mantener los vehículos de transporte detenidos aguardando la carga de los mismos, se imponen
Funcionamiento y Selección de Plataformas Niveladoras para Docks de Carga Hoy en día, debido al alto costo de mantener los vehículos de transporte detenidos aguardando la carga de los mismos, se imponen
TIPOS DE RESTRICCIONES
 RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
Sólo las Carretillas TOYOTA con SAS saben cómo
 Sólo las Carretillas TOYOTA con SAS saben cómo www.toyota-forklifts.es 135391_SAS_Concept_brochure_ES_12p.indd 1 12/02/10 10.23 MINIMIZAR COSTES Las carretillas elevadoras equipadas con SAS utilizan tecnologías
Sólo las Carretillas TOYOTA con SAS saben cómo www.toyota-forklifts.es 135391_SAS_Concept_brochure_ES_12p.indd 1 12/02/10 10.23 MINIMIZAR COSTES Las carretillas elevadoras equipadas con SAS utilizan tecnologías
RESUMEN: El presente artículo muestra el diseño mecánico y electrónico de un Asiento de potencia con tres grados de libertad.
 DISEÑO, CONSTRUCCIÓN E IMPLEMENTACIÓN DE UN ASIENTO DE POTENCIA CON 3 GRADOS DE LIBERTAD PARA LA ASOCIACIÓN DE DISCAPACITADOS MERCEDES DE JESÚS DEL CANTÓN SALCEDO Ing. Stalin Mena 1 /Ing. Juan Rocha 2
DISEÑO, CONSTRUCCIÓN E IMPLEMENTACIÓN DE UN ASIENTO DE POTENCIA CON 3 GRADOS DE LIBERTAD PARA LA ASOCIACIÓN DE DISCAPACITADOS MERCEDES DE JESÚS DEL CANTÓN SALCEDO Ing. Stalin Mena 1 /Ing. Juan Rocha 2
Capacitores y corrección del Factor de Potencia
 Capacitores y corrección del Factor de Potencia El factor de potencia se define como el cociente de la relación de la potencia activa entre la potencia aparente; esto es: FP = P S Comúnmente, el factor
Capacitores y corrección del Factor de Potencia El factor de potencia se define como el cociente de la relación de la potencia activa entre la potencia aparente; esto es: FP = P S Comúnmente, el factor
MODULO Nº12 TRANSISTORES MOSFET
 MODULO Nº12 TRANSISTORES MOSFET UNIDAD: CONVERTIDORES CC - CC TEMAS: Transistores MOSFET. Parámetros del Transistor MOSFET. Conmutación de Transistores MOSFET. OBJETIVOS: Comprender el funcionamiento del
MODULO Nº12 TRANSISTORES MOSFET UNIDAD: CONVERTIDORES CC - CC TEMAS: Transistores MOSFET. Parámetros del Transistor MOSFET. Conmutación de Transistores MOSFET. OBJETIVOS: Comprender el funcionamiento del
Diseño electrónico de relés de protección para minicentrales hidroeléctricas
 Luminotecnia ENTREGA 1 Diseño electrónico de relés de protección para minicentrales hidroeléctricas Elaborado por: Ing. Avid Román González (IEEE) Sabiendo que en la región del Cusco (Perú) existen muchas
Luminotecnia ENTREGA 1 Diseño electrónico de relés de protección para minicentrales hidroeléctricas Elaborado por: Ing. Avid Román González (IEEE) Sabiendo que en la región del Cusco (Perú) existen muchas
CAPITULO IV. Pruebas y resultados.
 CAPITULO IV. Pruebas y resultados. 4.1 Introducción En este capítulo, se comentarán las pruebas realizadas al prototipo. También, se comentarán los resultados obtenidos durante estas pruebas a razón de
CAPITULO IV. Pruebas y resultados. 4.1 Introducción En este capítulo, se comentarán las pruebas realizadas al prototipo. También, se comentarán los resultados obtenidos durante estas pruebas a razón de
U.T. 4.- CIRCUITOS ELÉCTRICOS
 U.T. 4.- CIRCUITOS ELÉCTRICOS Un circuito eléctrico es un conjunto de operadores eléctricos que, conectados entre sí de forma adecuada, permite la circulación y el control de la corriente eléctrica. OPERADORES
U.T. 4.- CIRCUITOS ELÉCTRICOS Un circuito eléctrico es un conjunto de operadores eléctricos que, conectados entre sí de forma adecuada, permite la circulación y el control de la corriente eléctrica. OPERADORES
DISEÑO Y CONSTRUCCIÓN DE UN VEHÍCULO ELÉCTRICO AUTOBALANCEADO PERSONAL (VEAP) DE DOS RUEDAS EN PARALELO ESTILO SEGWAY.
 DE DOS RUEDAS EN PARALELO ESTILO SEGWAY.") DISEÑO Y CONSTRUCCIÓN DE UN VEHÍCULO ELÉCTRICO AUTOBALANCEADO PERSONAL (VEAP) DE DOS RUEDAS EN PARALELO ESTILO SEGWAY. Víctor Velasco, Edison Pilicita, Freddy Salazar, José Quiroz Universidad De Fuerzas
DISEÑO Y CONSTRUCCIÓN DE UN VEHÍCULO ELÉCTRICO AUTOBALANCEADO PERSONAL (VEAP) DE DOS RUEDAS EN PARALELO ESTILO SEGWAY. Víctor Velasco, Edison Pilicita, Freddy Salazar, José Quiroz Universidad De Fuerzas
Covarianza y coeficiente de correlación
 Covarianza y coeficiente de correlación Cuando analizábamos las variables unidimensionales considerábamos, entre otras medidas importantes, la media y la varianza. Ahora hemos visto que estas medidas también
Covarianza y coeficiente de correlación Cuando analizábamos las variables unidimensionales considerábamos, entre otras medidas importantes, la media y la varianza. Ahora hemos visto que estas medidas también
CAPÍTULO VI PREPARACIÓN DEL MODELO EN ALGOR. En este capítulo, se hablará acerca de los pasos a seguir para poder realizar el análisis de
 CAPÍTULO VI PREPARACIÓN DEL MODELO EN ALGOR. En este capítulo, se hablará acerca de los pasos a seguir para poder realizar el análisis de cualquier modelo en el software Algor. La preparación de un modelo,
CAPÍTULO VI PREPARACIÓN DEL MODELO EN ALGOR. En este capítulo, se hablará acerca de los pasos a seguir para poder realizar el análisis de cualquier modelo en el software Algor. La preparación de un modelo,
Diagrama y Nomenclatura del sistema de lazo cerrado
 Diagrama y Nomenclatura del sistema de lazo cerrado En la figura 1 se muestra un diagrama de bloques general más detallado, el cual describe de forma adecuada a la mayoría de los sistemas de lazo cerrado.
Diagrama y Nomenclatura del sistema de lazo cerrado En la figura 1 se muestra un diagrama de bloques general más detallado, el cual describe de forma adecuada a la mayoría de los sistemas de lazo cerrado.
Figura 1. Tipos de capacitores 1
 CAPACITOR EN CIRCUITO RC OBJETIVO: REGISTRAR GRÁFICAMENTE LA DESCARGA DE UN CAPACITOR Y DETERMINAR EXPERIMENTALMENTE LA CONSTANTE DE TIEMPO RC DEL CAPACITOR. Ficha 12 Figura 1. Tipos de capacitores 1 Se
CAPACITOR EN CIRCUITO RC OBJETIVO: REGISTRAR GRÁFICAMENTE LA DESCARGA DE UN CAPACITOR Y DETERMINAR EXPERIMENTALMENTE LA CONSTANTE DE TIEMPO RC DEL CAPACITOR. Ficha 12 Figura 1. Tipos de capacitores 1 Se
SEWERIN. Pre Localización De Fugas de Agua
 SEWERIN Pre Localización De Fugas de Agua Ventajas del sistema La Pre localización de fugas de agua consiste en la escucha de la red en varios puntos. Para ello se utilizan loggers que graban sus sonidos
SEWERIN Pre Localización De Fugas de Agua Ventajas del sistema La Pre localización de fugas de agua consiste en la escucha de la red en varios puntos. Para ello se utilizan loggers que graban sus sonidos
VECTORES. Por ejemplo: la velocidad de un automóvil, o la fuerza ejercida por una persona sobre un objeto.
 Un vector v es un segmento orientado. VECTORES Se representa gráficamente por medio de una flecha, por ejemplo: Todos los vectores poseen las siguientes características: Punto de aplicación: es el lugar
Un vector v es un segmento orientado. VECTORES Se representa gráficamente por medio de una flecha, por ejemplo: Todos los vectores poseen las siguientes características: Punto de aplicación: es el lugar
Adecuación del. movilidad ciudadana. Luciano Andrés Alegre. Dr. Ingeniero industrial. Madrid, 10 de Mayo de 2.011
 Adecuación del vehículo eléctrico a la movilidad ciudadana Luciano Andrés Alegre Dr. Ingeniero industrial Madrid, 10 de Mayo de 2.011 Por qué el vehículo eléctrico en la ciudad? El VE no contamina. La
Adecuación del vehículo eléctrico a la movilidad ciudadana Luciano Andrés Alegre Dr. Ingeniero industrial Madrid, 10 de Mayo de 2.011 Por qué el vehículo eléctrico en la ciudad? El VE no contamina. La
Transformación de binario a decimal. Transformación de decimal a binario. ELECTRÓNICA DIGITAL
 ELECTRÓNICA DIGITAL La electrónica es la rama de la ciencia que se ocupa del estudio de los circuitos y de sus componentes, que permiten modificar la corriente eléctrica amplificándola, atenuándola, rectificándola
ELECTRÓNICA DIGITAL La electrónica es la rama de la ciencia que se ocupa del estudio de los circuitos y de sus componentes, que permiten modificar la corriente eléctrica amplificándola, atenuándola, rectificándola
TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO
 TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO Introducción.- Asanza,V 1 ; Laica,J 1 ; Paillacho,D 1 1. Centro de Visión y Robotica {vasanza, jlaica, dpailla} @fiec.espol.edu.ec Un
TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO Introducción.- Asanza,V 1 ; Laica,J 1 ; Paillacho,D 1 1. Centro de Visión y Robotica {vasanza, jlaica, dpailla} @fiec.espol.edu.ec Un
0. ÍNDICE...1 00. DIFERENCIAS MÁS IMPORTANTES ENTRE EL RBT 2002 Y EL RBT 1973...2
 0. ÍNDICE 0. ÍNDICE...1 00. DIFERENCIAS MÁS IMPORTANTES ENTRE EL RBT 2002 Y EL RBT 1973....2 1. MANDO Y PROTECCIÓN. INTERRUPTOR DE...4 1.1 Situación...4 1.2 Composición y características de los cuadros....4
0. ÍNDICE 0. ÍNDICE...1 00. DIFERENCIAS MÁS IMPORTANTES ENTRE EL RBT 2002 Y EL RBT 1973....2 1. MANDO Y PROTECCIÓN. INTERRUPTOR DE...4 1.1 Situación...4 1.2 Composición y características de los cuadros....4
CAPÍTULO 2 CLASIFICACIÓN EL ORDENAMIENTO GENERAL DE LOS SISTEMAS DE DIRECCIÓN
 19 CAPÍTULO 2 CLASIFICACIÓN EL ORDENAMIENTO GENERAL DE LOS SISTEMAS DE DIRECCIÓN 2.1 Sistemas de dirección Los sistemas de dirección son los que permiten controlar el movimiento del vehículo. El mecanismo
19 CAPÍTULO 2 CLASIFICACIÓN EL ORDENAMIENTO GENERAL DE LOS SISTEMAS DE DIRECCIÓN 2.1 Sistemas de dirección Los sistemas de dirección son los que permiten controlar el movimiento del vehículo. El mecanismo
Un vehículo eléctrico
 Un vehículo eléctrico Es un vehículo de combustible alternativo impulsado por uno o más motores eléctricos. La tracción puede ser proporcionada por ruedas o hélices impulsadas por motores rotativos, o
Un vehículo eléctrico Es un vehículo de combustible alternativo impulsado por uno o más motores eléctricos. La tracción puede ser proporcionada por ruedas o hélices impulsadas por motores rotativos, o
Fig 4-7 Curva característica de un inversor real
 Clase 15: Criterios de Comparación de Familias Lógicas. Características del Inversor Real Cuando comenzamos a trabajar con un inversor real comienzan a aparecer algunos inconvenientes que no teníamos en
Clase 15: Criterios de Comparación de Familias Lógicas. Características del Inversor Real Cuando comenzamos a trabajar con un inversor real comienzan a aparecer algunos inconvenientes que no teníamos en
Señal de Referencia: Es el valor que se desea que alcance la señal de salida. SET POINT.
 EL ABC DE LA AUTOMATIZACION ALGORITMO DE CONTROL PID; por Aldo Amadori Introducción El Control automático desempeña un papel importante en los procesos de manufactura, industriales, navales, aeroespaciales,
EL ABC DE LA AUTOMATIZACION ALGORITMO DE CONTROL PID; por Aldo Amadori Introducción El Control automático desempeña un papel importante en los procesos de manufactura, industriales, navales, aeroespaciales,
GUÍA DE USUARIO Motor paso a paso REV. 1.0
 GUÍA DE USUARIO Motor paso a paso REV. 1.0 Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. +56 2 23339579 www.olimex.cl cursos.olimex.cl info@olimex.cl GUÍA DE USUARIO:
GUÍA DE USUARIO Motor paso a paso REV. 1.0 Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. +56 2 23339579 www.olimex.cl cursos.olimex.cl info@olimex.cl GUÍA DE USUARIO:
ALTERNADOR FUNCIONAMIENTO DEL UNIVERSIDAD DE GUALAJARA TEC: JUAN CARLOS SEDANO DE LA ROSA
 UNIVERSIDAD DE GUALAJARA CENTRO UNIVERSITARIO DE LA COSTA SUR DIVISIÓN DE DESARROLLO REGIONAL DEPARTAMENTO DE INGENIERÍAS FUNCIONAMIENTO DEL ALTERNADOR TEC: JUAN CARLOS SEDANO DE LA ROSA FUNCIONAMIENTO
UNIVERSIDAD DE GUALAJARA CENTRO UNIVERSITARIO DE LA COSTA SUR DIVISIÓN DE DESARROLLO REGIONAL DEPARTAMENTO DE INGENIERÍAS FUNCIONAMIENTO DEL ALTERNADOR TEC: JUAN CARLOS SEDANO DE LA ROSA FUNCIONAMIENTO
El presente reporte de tesis describe los procesos llevados acabo para el diseño y
 CAPITULO 1.-INTRODUCCIÓN El presente reporte de tesis describe los procesos llevados acabo para el diseño y construcción de un prototipo de sensor de torque. El primer paso, consistió en realizar un estudio
CAPITULO 1.-INTRODUCCIÓN El presente reporte de tesis describe los procesos llevados acabo para el diseño y construcción de un prototipo de sensor de torque. El primer paso, consistió en realizar un estudio
7.- Para construir un circuito eléctrico utilizamos 150 metros de hilo de cobre. Si su sección es de 0 8 mm 2 Cuánto valdrá su resistencia?
 1. Calcula la Resistencia de un hilo de hierro (resistividad del mm 2 hierro ρ Fe = 0.1 Ω ) de longitud 3 m y sección de 10 m mm 2. 2. Ahora disponemos de dos hilos, uno de cobre (resistividad del cobre
1. Calcula la Resistencia de un hilo de hierro (resistividad del mm 2 hierro ρ Fe = 0.1 Ω ) de longitud 3 m y sección de 10 m mm 2. 2. Ahora disponemos de dos hilos, uno de cobre (resistividad del cobre
CAPÍTULO 2 DEFINICIÓN DEL PROBLEMA
 CAPÍTULO 2 DEFINICIÓN DEL PROBLEMA En el capítulo anterior se describió la situación inicial en la que se encontraba la Coordinación de Cómputo Académico (CCA) del Departamento de Ingenierías (DI) de la
CAPÍTULO 2 DEFINICIÓN DEL PROBLEMA En el capítulo anterior se describió la situación inicial en la que se encontraba la Coordinación de Cómputo Académico (CCA) del Departamento de Ingenierías (DI) de la
1. INTRODUCCIÓN 1.1 INGENIERÍA
 1. INTRODUCCIÓN 1.1 INGENIERÍA Es difícil dar una explicación de ingeniería en pocas palabras, pues se puede decir que la ingeniería comenzó con el hombre mismo, pero se puede intentar dar un bosquejo
1. INTRODUCCIÓN 1.1 INGENIERÍA Es difícil dar una explicación de ingeniería en pocas palabras, pues se puede decir que la ingeniería comenzó con el hombre mismo, pero se puede intentar dar un bosquejo
Tecnología IP para videovigilancia... Los últimos avances han hecho posible conectar cámaras directamente a una red de ordenadores basada en el
 para videovigilancia....... Los últimos avances han hecho posible conectar cámaras directamente a una red de ordenadores basada en el protocolo IP. La tecnología de las cámaras de red permite al usuario
para videovigilancia....... Los últimos avances han hecho posible conectar cámaras directamente a una red de ordenadores basada en el protocolo IP. La tecnología de las cámaras de red permite al usuario
EJERCICIO PARTE ESPECÍFICA OPCIÓN B DIBUJO TÉCNICO Duración: 1h 15
 Personas Adultas PARTE ESPECÍFICA: DIBUJO TÉCNICO OPCIÓN B DATOS DEL ASPIRANTE CALIFICACIÓN Apellidos:. Nombre:.... EJERCICIO PARTE ESPECÍFICA OPCIÓN B DIBUJO TÉCNICO Duración: 1h 15 EJERCICIO 1. CIRCUNFERENCIAS
Personas Adultas PARTE ESPECÍFICA: DIBUJO TÉCNICO OPCIÓN B DATOS DEL ASPIRANTE CALIFICACIÓN Apellidos:. Nombre:.... EJERCICIO PARTE ESPECÍFICA OPCIÓN B DIBUJO TÉCNICO Duración: 1h 15 EJERCICIO 1. CIRCUNFERENCIAS
Electrificación en zonas rurales mediante sistemas híbridos
 Electrificación en zonas rurales mediante sistemas híbridos Julio 2013 Pág. 1 de 6 Antecedentes y situación actual En los últimos años, el crecimiento y desarrollo del sector fotovoltaico ha sufrido un
Electrificación en zonas rurales mediante sistemas híbridos Julio 2013 Pág. 1 de 6 Antecedentes y situación actual En los últimos años, el crecimiento y desarrollo del sector fotovoltaico ha sufrido un
presentamos el pie proprio foot
 walk your way presentamos el pie proprio foot el pie proprio foot tm es el primer módulo de pie inteligente del mundo que ofrece unas ventajas fisiológicas inigualables a quienes han sufrido una amputación
walk your way presentamos el pie proprio foot el pie proprio foot tm es el primer módulo de pie inteligente del mundo que ofrece unas ventajas fisiológicas inigualables a quienes han sufrido una amputación
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION
 CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
6 CONCLUSIONES Y RECOMENDACIONES
 6 Conclusiones y recomendaciones 109 6 CONCLUSIONES Y RECOMENDACIONES 6.1 CONCLUSIONES La presente investigación se ha dedicado al estudio del ángulo de presión, radio de curvatura y presión de contacto
6 Conclusiones y recomendaciones 109 6 CONCLUSIONES Y RECOMENDACIONES 6.1 CONCLUSIONES La presente investigación se ha dedicado al estudio del ángulo de presión, radio de curvatura y presión de contacto
SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética.
 SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética. A diferencia de los sistemas monofásicos de C.A., estudiados hasta ahora, que utilizan dos conductores
SISTEMA MONOFÁSICO Y TRIFÁSICO DE C.A Unidad 1 Magnetismo, electromagnetismo e Inducción electromagnética. A diferencia de los sistemas monofásicos de C.A., estudiados hasta ahora, que utilizan dos conductores
3.- BANCOS PARA OBTENCION DE LA POTENCIA. Por Carlos Nuñez ( Carlosn ).
.") 3.- BANCOS PARA OBTENCION DE LA POTENCIA. Por Carlos Nuñez ( Carlosn ). Para evaluar la potencia de un motor termico o de un vehiculo, la forma mas habitual que emplean los fabricantes, es utilizar un
3.- BANCOS PARA OBTENCION DE LA POTENCIA. Por Carlos Nuñez ( Carlosn ). Para evaluar la potencia de un motor termico o de un vehiculo, la forma mas habitual que emplean los fabricantes, es utilizar un
Seminario Electrónico de Soluciones Tecnológicas sobre Content Networking
 Seminario Electrónico de Soluciones Tecnológicas sobre Content Networking 1 de 13 Seminario Electrónico de Soluciones Tecnológicas sobre Content Networking 3 Bienvenida. 4 Objetivos. 5 Soluciones comerciales
Seminario Electrónico de Soluciones Tecnológicas sobre Content Networking 1 de 13 Seminario Electrónico de Soluciones Tecnológicas sobre Content Networking 3 Bienvenida. 4 Objetivos. 5 Soluciones comerciales
VEHICULO HIBRIDO ELÉCTRICO (HEV)
") VEHICULO HIBRIDO ELÉCTRICO (HEV) INTRODUCCIÓN Un vehículo híbrido es aquel que combina dos o más sistemas, que a su vez consumen fuentes de energía diferentes. Uno de los sistemas es el generador de la
VEHICULO HIBRIDO ELÉCTRICO (HEV) INTRODUCCIÓN Un vehículo híbrido es aquel que combina dos o más sistemas, que a su vez consumen fuentes de energía diferentes. Uno de los sistemas es el generador de la
1. Vectores 1.1. Definición de un vector en R2, R3 (Interpretación geométrica), y su generalización en Rn.
, y su generalización en Rn.") 1. VECTORES INDICE 1.1. Definición de un vector en R 2, R 3 (Interpretación geométrica), y su generalización en R n...2 1.2. Operaciones con vectores y sus propiedades...6 1.3. Producto escalar y vectorial
1. VECTORES INDICE 1.1. Definición de un vector en R 2, R 3 (Interpretación geométrica), y su generalización en R n...2 1.2. Operaciones con vectores y sus propiedades...6 1.3. Producto escalar y vectorial
FUENTES DE ALIMENTACION
 FUENTES DE ALIMENTACION INTRODUCCIÓN Podemos definir fuente de alimentación como aparato electrónico modificador de la electricidad que convierte la tensión alterna en una tensión continua. Remontándonos
FUENTES DE ALIMENTACION INTRODUCCIÓN Podemos definir fuente de alimentación como aparato electrónico modificador de la electricidad que convierte la tensión alterna en una tensión continua. Remontándonos
Anexo I: Descripción y Modelo de Características
 Este documento describe las distintas características de los productos que integran la VehicleControlSystem SPL. El modelo de características (Features Model) en el que se incluye la organización y las
Este documento describe las distintas características de los productos que integran la VehicleControlSystem SPL. El modelo de características (Features Model) en el que se incluye la organización y las
CLASIFICACIÓN DE LAS COMPUTADORAS. Ing. Erlinda Gutierrez Poma
 CLASIFICACIÓN DE LAS COMPUTADORAS Ing. Erlinda Gutierrez Poma Tipos de Computadoras Dentro de la evolución de las computadoras, han surgido diferentes equipos con diferentes tamaños y características según
CLASIFICACIÓN DE LAS COMPUTADORAS Ing. Erlinda Gutierrez Poma Tipos de Computadoras Dentro de la evolución de las computadoras, han surgido diferentes equipos con diferentes tamaños y características según
LINEAS EQUIPOTENCIALES
 LINEAS EQUIPOTENCIALES Construcción de líneas equipotenciales. Visualización del campo eléctrico y del potencial eléctrico. Análisis del movimiento de cargas eléctricas en presencia de campos eléctricos.
LINEAS EQUIPOTENCIALES Construcción de líneas equipotenciales. Visualización del campo eléctrico y del potencial eléctrico. Análisis del movimiento de cargas eléctricas en presencia de campos eléctricos.
1. Introducción. Actualmente el uso de automóviles es muy común, además existe una gran variedad de
 1. Introducción Actualmente el uso de automóviles es muy común, además existe una gran variedad de ellos en el mercado; por esta razón la industria automovilística se renueva a pasos agigantados realizando
1. Introducción Actualmente el uso de automóviles es muy común, además existe una gran variedad de ellos en el mercado; por esta razón la industria automovilística se renueva a pasos agigantados realizando
MAGNETISMO INDUCCIÓN ELECTROMAGNÉTICA FÍSICA II - 2011 GUÍA Nº4
 GUÍA Nº4 Problema Nº1: Un electrón entra con una rapidez v = 2.10 6 m/s en una zona de campo magnético uniforme de valor B = 15.10-4 T dirigido hacia afuera del papel, como se muestra en la figura: a)
GUÍA Nº4 Problema Nº1: Un electrón entra con una rapidez v = 2.10 6 m/s en una zona de campo magnético uniforme de valor B = 15.10-4 T dirigido hacia afuera del papel, como se muestra en la figura: a)
UF0035: Operaciones de caja en la venta
 UF0035: Operaciones de caja en la venta TEMA 1. Caja y Terminal Punto de Venta TEMA 2. Procedimientos de cobro y pago de las operaciones de venta OBJETIVOS - Aplicar los procedimientos de registro y cobro
UF0035: Operaciones de caja en la venta TEMA 1. Caja y Terminal Punto de Venta TEMA 2. Procedimientos de cobro y pago de las operaciones de venta OBJETIVOS - Aplicar los procedimientos de registro y cobro
U.T. 2 Planificación de Proyectos
 U.T. 2 Planificación de Proyectos En el tema anterior hemos visto que es determinante una buena planificación del proyecto, ya que de no realizarse ésta, nunca sabremos el tiempo que resta para la finalización
U.T. 2 Planificación de Proyectos En el tema anterior hemos visto que es determinante una buena planificación del proyecto, ya que de no realizarse ésta, nunca sabremos el tiempo que resta para la finalización
La Computadora. Operaciones de entrada al ser receptora de información. Operaciones de cálculo, lógica y almacenamiento.
 La Computadora Para entender mejor el concepto de Computadora tenemos que saber qué es la computación. La computación como tal, se entinte como el arte de contar o calcular, tal como lo afirma el Diccionario
La Computadora Para entender mejor el concepto de Computadora tenemos que saber qué es la computación. La computación como tal, se entinte como el arte de contar o calcular, tal como lo afirma el Diccionario
Medidor de consumo LEGO
 Medidor de consumo LEGO Primeros pasos El Medidor de consumo se compone de dos partes: La Pantalla de consumo LEGO y el Acumulador eléctrico LEGO. El Acumulador eléctrico encaja en la parte inferior de
Medidor de consumo LEGO Primeros pasos El Medidor de consumo se compone de dos partes: La Pantalla de consumo LEGO y el Acumulador eléctrico LEGO. El Acumulador eléctrico encaja en la parte inferior de
Como utilizar un servo motor con Arduino.
 Como utilizar un servo motor con Arduino. Revisión Diciembre 2009 Desarrollada por: Christopher Thompson cthompson@olimex.cl Revisada por: Paul Aguayo paguayo@olimex.cl 2 1 Introducción Arduino es una
Como utilizar un servo motor con Arduino. Revisión Diciembre 2009 Desarrollada por: Christopher Thompson cthompson@olimex.cl Revisada por: Paul Aguayo paguayo@olimex.cl 2 1 Introducción Arduino es una