Benemérita Universidad Autónoma de Puebla
|
|
|
- Salvador Figueroa Espinoza
- hace 8 años
- Vistas:
Transcripción
1 Benemérita Universidad Autónoma de Puebla FACULTAD DE CIENCIAS DE LA ELECTRONICA MATERIA: Control I PROFESOR: Jaime Cid Monjaraz TRABAJO: Reporte del proyecto del Brazo Robot Oruga ALUMNOS: César Aguilar Hernández. Gerardo Soriano Cohetero. Miguel Angel Hernández Vélez. Sergio Gonzalo Castillo Saucedo. Diego Perea Verano 2003 Puebla de los Angeles 2003

2 Objetivos: Diseñar y armar un prototipo con las distintas partes del Lego, incluyendo sensores, motores y la gran variedad de piezas y engranes que incluye el paquete de Lego. El diseño debe ser controlable de manera automática por el controlador RCX del lego. Que el alumno comprenda la importancia que tiene el control en los diferentes tipos de sistemas y robots. Introducción. Tipos y definiciones de Robots. La palabra robot se empleó por primera vez en 1920 en una obra de teatro llamada "R.U.R." o "Los Robots Universales de Rossum" escrita por el dramaturgo checo Karel Capek. La trama era sencilla: el hombre fabrica un robot luego el robot mata al hombre. Sin embargo, películas más recientes, como "La Guerra de las Galaxias" de 1977, retratan a robots como "C3PO" y "R2D2" que ayudan al hombre. "Número 5" de "Cortocircuito" y "C3PO" realmente tienen apariencia humana. Entre las diferentes definiciones de la palabra robot, tenemos: Ingenio mecánico controlado electrónicamente, capaz de moverse y ejecutar de forma automática acciones diversas, siguiendo un programa establecido. Máquina que en apariencia o comportamiento imita a las personas o a sus acciones como, por ejemplo, en el movimiento de sus extremidades Un robot es una máquina que hace algo automáticamente en respuesta a su entorno. Un robot es un puñado de motores controlados por un programa de ordenador. Un robot es un ordenador con músculos. Móviles Los robots móviles están provistos de patas, ruedas u orugas que los capacitan para desplazarse de acuerdo su programación. Elaboran la información que reciben a través de sus propios sistemas de sensores y se emplean en determinado tipo de instalaciones industriales, sobre todo para el transporte de mercancías en cadenas de producción y almacenes. También se utilizan robots de este tipo para la investigación en lugares de difícil acceso o muy distantes, como es el caso de la exploración espacial y las investigaciones o rescates submarinos.

3 Industriales Los robots industriales son artilugios mecánicos y electrónicos destinados a realizar de forma automática determinados procesos de fabricación o manipulación. También reciben el nombre de robots algunos electrodomésticos capaces de realizar varias operaciones distintas de forma simultánea o consecutiva, sin necesidad de intervención humana, como los también llamados «procesadores», que trocean los alimentos y los someten a las oportunas operaciones de cocción hasta elaborar un plato completo a partir de la simple introducción de los productos básicos. Los robots industriales, en la actualidad, son con mucho los más frecuentemente encontrados. Japón y Estados Unidos lideran la fabricación y consumo de robots industriales siendo Japón el número uno. Es curioso ver cómo estos dos países han definido al robot industrial: La Asociación Japonesa de Robótica Industrial (JIRA): Los robots son "dispositivos capaces de moverse de modo flexible análogo al que poseen los organismos vivos, con o sin funciones intelectuales, permitiendo operaciones en respuesta a las órdenes humanas". El Instituto de Robótica de América (RIA): Un robot industrial es "un manipulador multifuncional y reprogramable diseñado para desplazar materiales, componentes,

4 herramientas o dispositivos especializados por medio de movimientos programados variables con el fin de realizar tareas diversas". Teleoperadores Hay muchos "parientes de los robots" que no encajan exactamente en la definición precisa. Un ejemplo son los teleoperadores. Dependiendo de cómo se defina un robot, los teleoperadores pueden o no clasificarse como robots. Los teleoperadores se controlan remotamente por un operador humano. Cuando pueden ser considerados robots se les llama "telerobots". Cualquiera que sea su clase, los teleoperadores son generalmente muy sofisticados y extremadamente útiles en entornos peligrosos tales como residuos químicos y desactivación de bombas. Desarrollo. Nuestro proyecto consistió en armar un brazo oruga, debido a que viendo los manuales del Lego, nos intereso el armado de este prototipo del brazo, sin embrago, este prototipo no tenia incluida la base de la oruga, que se podría decir, que es una variante que fue incluida en nuestro proyecto, con la finalidad de que nuestro brazo robot tuviera movimientos hacia adelante y hacia atrás. A continuación de muestra el armado de la oruga: Esta oruga tiene la función de base para nuestro brazo robot, pero además lo ayuda a desplazarse de adelante hacia atrás, esto lo logra con ayuda de una motor DC, pero el motor no seria suficiente para mover todo el brazo robot por lo que es necesario la ayuda de engranes como se puede observar en la figura de arriba. El motor puede ser controlado por medio del control remoto del lego, cuando este es conectado a cualquiera de los tres puertos (A,B,C) del RCX o pude ser programado con ayuda del editor de LEGO.

5 Descripción del RCX. También se muestra el RCX que viene en el lego, el cual se podría decir que es uno de los accesorios de más importancia debido a que es el controlador de los motores, los sensores y es en el cual se almacenan los programas que hacen que los prototipos realicen de manera automática una determinada rutina que se haya programado. Cabe mencionar que el RCX es programado por medio de una señal infrarrojo, similar a la señal que envía un control remoto de televisión, para ello es necesario instalar el programa de Lego en una computadora y por medio del puerto USB de la computadora es como el control se comunica con la computadora y este envía la señal de infrarrojo hacia el RCX. Además cabe mencionar que el RCX cuenta con 3 puertos para el control de 3 motores de DC y 3 puertos para la manipulación de los sensores. Se podría decir que a nivel programación cuenta con 5 slots para programarle 5 diferentes rutinas, sin embrago, el slot 1 no funciona. A continuación se muestra el RCX: A continuación se muestra el armado de la base de rotación del brazo robot, también se puede observar el control principal el RCX.

6 Para que el brazo robot pueda girar sobre su propio eje necesita de la ayuda de un motor DC el cual también es controlado con ayuda del RCX Pero para este caso los necesitamos que el motor haga rotar al brazo robot sobre su propio eje por lo que se necesitara de la ayuga de engranes y una polea, estos engranes y poleas además de proporcionar un mayor torque, para poder mover el brazo son necesarios para trasladar el movimiento en donde se necesita, por que como se observa en la figura por problemas de diseño el motor nos queda en una posición totalmente opuesta en donde se esta realizando la función de rotación del brazo robot. A continuación se muestra la sección encargada de proporcionar el movimiento de arriba y abajo del brazo robot.

7 En la figura se muestran los engranes que proporcionarán la fuerza necesaria para mover el brazo robot de arriba abajo. En la figura, la sección de engranes dentro del circulo rojo, es la encargada de mover el brazo de arriba hacia abajo, esto debido a que, cuando el motor gira en un sentido también giran debido a la forma en que están colocados hacen mover el brazo de arriba abajo pero estos tienen un tope mecánico, por lo que podemos dañar el motor o el mecanismo, por lo que se utiliza un censor de toque el cual detiene el motor cuando llega a un máximo o un mínimo.

8 En esta figura se puede observar el brazo completamente armado, cabe mencionar que la mano que se observa dentro del circulo se abrirá mientras el brazo desciende y cerrara al subir. Finalmente el armado total del Brazo se muestra a continuación: Finalmente con la variante de la base oruga que se le implemento al brazo nos quedo de la siguiente manera:

9 Características del brazo robot 1. El brazo robot se encuentra montado sobre una oruga, la cual puede desplazarse hacia delante y atrás.

10 2. El brazo Robot puede rotar sobre su propio eje 3. Cuenta con un censor de luz el cual puede detectar objetos sobre una superficie 4. Puede abrir la mano cuando baja el brazo y la cierra cuando sube. Programación del Juguete lego Brazo-Oruga Fig 1. Brazo-Oruga 1. Motor del movimiento arriba y abajo del brazo 2. Pinza del brazo que se abre cuando el brazo está abajo 3. Base del brazo para el movimiento izquierda derecha 4. Sensor de luz para detectar objetos que se encuentren abajo de la pinza. 5. Oruga para movimiento adelante-atrás de todo el brazo 6. Sensor de contacto utilizado como tope de subida de el brazo 7. Sensor de contacto utilizado como tope de bajada de el brazo Poder controlar los movimientos que puede realizar el brazo-oruga mostrado en la figura 1 de arriba así como también hacer uso de los sensores de luz y contacto para ayudar en la automatización de éste, siendo los movimientos que se pueden realizar los siguientes. Brazo arriba y abajo, controlado por el motor B. Brazo izquierda y derecha, controlado por el motor A. Oruga Adelante y atrás, controlado por el motor C. Sensor de contacto como tope de subida y bajada, conectado a la entrada 1. Sensor de luz para la detección de objetos, conectado a la entrada 2

11 Diseño del Programa Dado que el diseño del proyecto se basó en el brazo incluido en uno de los kits del paquete del lego, la programación de éste se basó también en los bloques incluidos en el módulo predesignado para la programación del mismo contenido en el CD incluido en el paquete. En la fig 2a se pueden observar la lista de módulos predesignados contenido en el programa Robotics Invention System 2.0. Fig 2a listado módulos de programación para los diferente robots prediseñados Fig 2b Entorno de programación La programación del Brazo es relativamente sencilla, básicamente se basa en bloques gráficos que se unen uno tras otro de manera que se construya una secuencia como si se tratase de un diagrama de flujo. Los bloques se pueden describir como Bloques grandes y Bloques pequeños. Los bloques pequeños son bloques básicos que contiene las instrucciones para el direccionamiento, encendido y apagado de los 3 motores(abc) que pueden ser activados en el RCX, también se encuentran otro tipo de instrucciones elementales para poder controlar por completo el comportamiento del RCX. Algunos de los bloques básicos que fueron utilizadas son las siguientes: set direction, on Wait for, Repeat for y Off. La instrucción On y Off nos brinda la opción de seleccionar uno o varios motores para activar o desactivar en un menú como el de la fig 3a y fig 3b

12 Fig. 3a Opciones para el bloque on Fig 3b opciones para el bloque off Set direction, pone la polaridad que tendrá los motores activados por set, utilizando el menú de la siguiente fig 4ª Fig. 4a Opciones para poner a dirección del motor Fig 4b opciones para esperar por ciertotiempo Wait for, hace un retardo por un tiempo t, especificado en el menú de la fig 4b En los bloques grandes están contenidos los bloques pequeños, estos bloques sirven para poder programar de una mejor forma ya que dentro de ellos se contiene un miniprograma que realiza una tarea en específico

13 Fig 5a Bloque grande llamado Arriba Fig 5b Bloques pequeños contenidos dentro de un bloque grande Por ejemplo, un bloque grande puede ser llamado como Arriba (fig 5a y fig 5b) que moverá el brazo en dicha dirección y adentro de éste módulo primero se pone la dirección del motor B con set direction Bv, en seguida se enciende el motor B con On B que se mantendrá durante 1 segundo en éste estado con la instrucción Wait for 1.0 sec, una vez terminado el tiempo específicado en Wait for el motor se apaga con Off B. También existe bloques de decisión y bloques llamados bucles o ciclo, que a lo mismo como en lenguajes de programación como C, los bloques if tienen como finalidad evaluar varios valores para poder tomar una decisión en el flujo de la ejecución de instrucciones a ejecutar. En el lenguaje de programación del lego podemos utilizar los sensores como elementos para comparar con un número y así poder tomar decisiones. Cabe señalar que para los censores utilizados, el funcionamiento de estos se utilizan dentro de las sentencias IF, While, Until. Sentencia if, compara con el valor que tenga el sensor, por ejemplo si el sensor de contacto está presionado, entonces pressed es 1, y toma la decisión en yes en la fig 6 Fig 6 Sentencia if

14 Al igual que en C Repeat while y Repeat until, son sentencias bucle o de ciclo, es decir que se ejecuta lo que se encuentre dentro de dicho segmente hasta que la condición de salida se cumpla, por ejemplo también utilizando el sensor de contacto en la fig 7 el ciclo se repetirá hasta que el sensor esté presionado, una vez el sensor capture presión el ciclo terminará y seguirá con las instrucciones siguientes. Fig. 7a Repeat While Fig. 7b Repeat until Además del sensor de contacto existe el sensor de luz y estos se pueden considerar como se explica a continuación. Sensor de contacto: para configurar este sensor de contacto el programa nos proporciona los siguientes menús. Fig 8a Fig 8b Fig 8c En la fig 8a, se presenta el puerto en donde va a estar conectado el sensor los cuales pueden ser puerto 1, 2 y 3. En la fig 8b, se elige el modo en el cual va a operar el sensor de presión, y por último en la figura 8c, se muestra el modo en el cual finalmente operará el sensor. El sensor de luz emite con un led un haz luminoso que es reflejado por algún cuerpo y la luz reflejada es captada por un fotosensor, así en la fig 9a se selecciona el puerto en el cual se conectó el sensor, para esté sensor solo están disponibles los puertos 2 y 3, en seguida en la fig 9b se muestra el modo de operación del sensor de luz dándonos la opción

15 de detector de brillo, de obscuridad y sensor de un haz luminoso. En la fig 9c, nos muestra el rango de sensibilidad para nuestro sensor mostrándonos una barra con una escala de 1 a 100, y también nos muestra un modo automático, la opción depende de la aplicación que se tenga para el sensor, como opción adicional se proporcional el menú Try it en la fig 9d, esto ara calibrar el sensor dependiendo de nuestra necesidades mostrándonos en tiempo real la detección de brillo del sensor de luz. Fig 9a selección de puerto Fig 9b, modo de operación del sensor de luz Fig 9c Nivel de brillo del sensor Fig 9d, test de detección de brillo en tiempo real. Una vez visto una descripción breve de los bloques básicos que se manejan en el programa del juguete lego podemos programar una rutina para nuestro brazo, para esto primero definiremos por medio de un diagrama de flujo común lo que queremos que haga nuestro brazo, este diagrama se muestra en la figura 10.

16 Inicio Poner arriba el brazo hasta el tope Iniciar búsqueda Moviendo de izquierda a derecha el brazo No El objeto fue encontrado? Si derecha Cual fue la dirección del brazo cuando enontró el objeto? izquierda Mover el brazo a la derecha 30 Mover el brazo a la izquierda 30 Baja el brazo abajo hasta el tope Baja el brazo abajo hasta el tope Mover el brazo a la izquierda 30 Mover el brazo a la derecha 30 Mover el brazo arriba hasta el tope Mover la oruga hacia atras durante 10 seg Bajar el brazo hasta el tope FIN Fig 10. Diagrama de flujo a programar en el RCX del lego La rutina de la figura 10, como vemos no es muy compleja, básicamente se está programando al brazo-oruga para que primero se posicione arriba, en seguida busque un objeto con el sensor de luz y si lo halla que mueva un poco el brazo a la derecha o a la izquierda según la dirección previa del brazo, a continuación el brazo recogerá el objeto moviéndose hacia abajo y luego hacia la derecha o izquierda también sea el caso, para finalmente agarrar el objeto moviendo el brazo hacia arriba, por último la oruga se mueve hacia atrás para transportar el objeto capturado durante cierto tiempo para finalmente soltar el objeto bajando el brazo.

17 En la figura 11a y 11b mostramos los bloques realizados en el programa del lego, y además se incluyen los bloques que representan al diagrama de flujo de la fig 10, para relacionarlos entre sí. Fig 11a Fig 11b

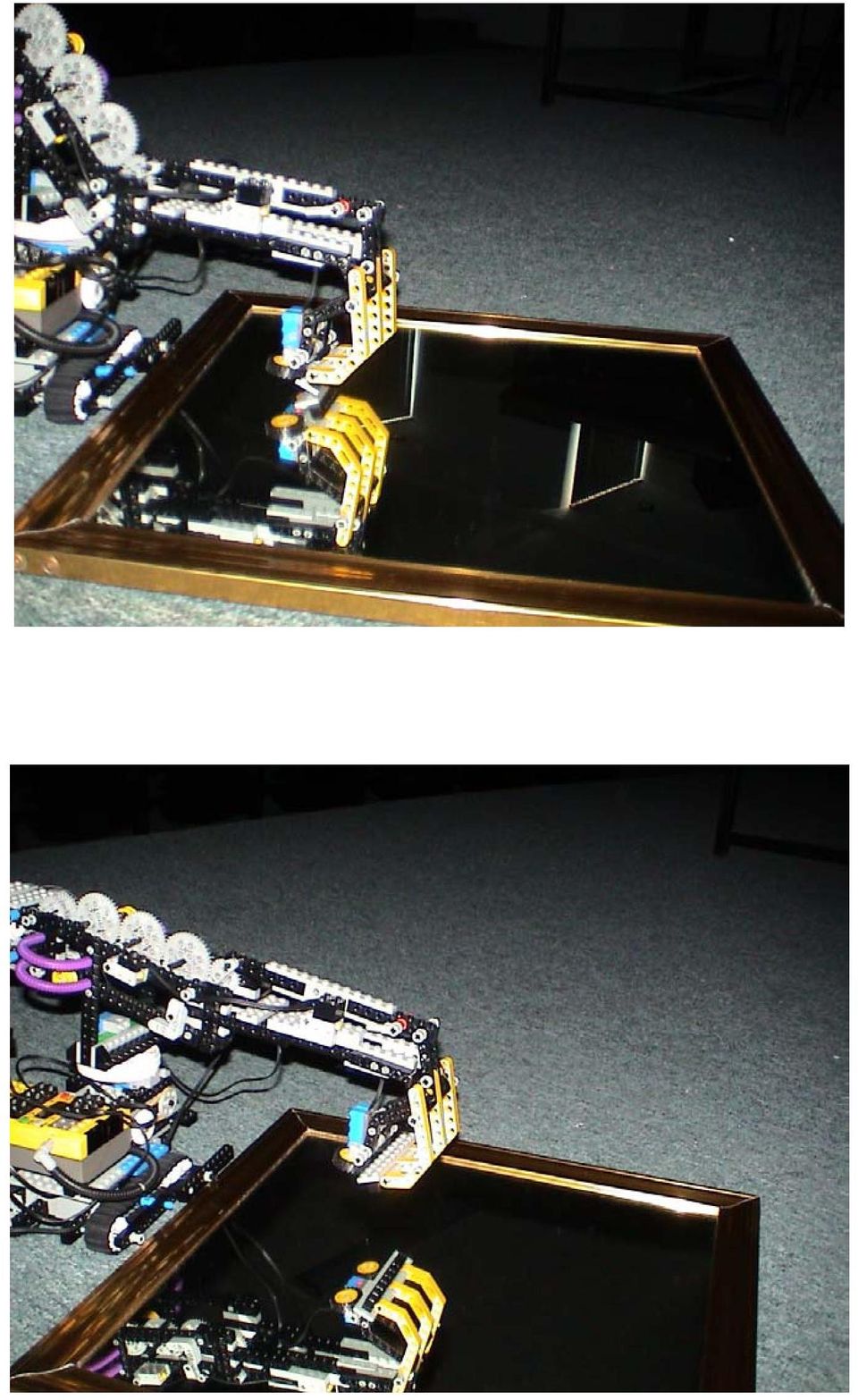
18 Galería de fotos. A continuación se muestra una galeria de fotos que fueron tomadas al brazo oruga realizando las diferentes rutinas que le fueron programadas:

19

20
21
22
23
24
25
26 Conclusiones. Se puede mencionar que no tuvimos mayores complicaciones con el armado de nuestro brazo oruga, simplemente es cuestión de dedicarle un buen lapso de tiempo, con lo que respecta a la programación pues fue relativamente sencilla, pues para ello, ya se cuenta con los bloques predeterminados que realizan cierta función, lo poco que represento dificultad fue al momento de unirlos, sin embargo, resulto ser fácil. Algunos de los problemas que se nos presento al poner a trabajar nuestro brazo robot, fue con la detección de los objetos, pues de acuerdo a cuanto se encontraba iluminado el ambiente donde nos encontrábamos con el robot, era necesario calibrar nuevamente el sensor de luz, para que el brazo detectara la presencia de un objeto y de esta manera tomara el objeto de manera automática. Fuera de esto no tuvimos grandes complicaciones.
TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO
 TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO Introducción.- Asanza,V 1 ; Laica,J 1 ; Paillacho,D 1 1. Centro de Visión y Robotica {vasanza, jlaica, dpailla} @fiec.espol.edu.ec Un
TELEOPERACIÓN DE UN ROBOT MOVIL CON MANEJO DIFERENCIAL A BAJO COSTO Introducción.- Asanza,V 1 ; Laica,J 1 ; Paillacho,D 1 1. Centro de Visión y Robotica {vasanza, jlaica, dpailla} @fiec.espol.edu.ec Un
El presente reporte de tesis describe los procesos llevados acabo para el diseño y
 CAPITULO 1.-INTRODUCCIÓN El presente reporte de tesis describe los procesos llevados acabo para el diseño y construcción de un prototipo de sensor de torque. El primer paso, consistió en realizar un estudio
CAPITULO 1.-INTRODUCCIÓN El presente reporte de tesis describe los procesos llevados acabo para el diseño y construcción de un prototipo de sensor de torque. El primer paso, consistió en realizar un estudio
Sube Selector Canales. Canal. Baja. Tema 4: Bases Matemáticas II. 4.1 Sistemas con memoria o secuenciales. 4.1.1 Introducción.
 Bases Matemáticas II - ágina 1 de 11 Tema 4: Bases Matemáticas II. 4.1 Sistemas con memoria o secuenciales. 4.1.1 Introducción. Hasta ahora hemos tratados con dispositivos lógicos cuyas salidas dependían
Bases Matemáticas II - ágina 1 de 11 Tema 4: Bases Matemáticas II. 4.1 Sistemas con memoria o secuenciales. 4.1.1 Introducción. Hasta ahora hemos tratados con dispositivos lógicos cuyas salidas dependían
AGREGAR UN EQUIPO A UNA RED Y COMPARTIR ARCHIVOS CON WINDOWS 7
 Tutoriales de ayuda e información para todos los niveles AGREGAR UN EQUIPO A UNA RED Y COMPARTIR ARCHIVOS CON WINDOWS 7 Como agregar a una red existente un equipo con Windows 7 y compartir sus archivos
Tutoriales de ayuda e información para todos los niveles AGREGAR UN EQUIPO A UNA RED Y COMPARTIR ARCHIVOS CON WINDOWS 7 Como agregar a una red existente un equipo con Windows 7 y compartir sus archivos
Instituto Tecnológico de Saltillo
 Instituto Tecnológico de Saltillo Cuestionario Robótica Unidad I Temas: antecedentes históricos, relación entre la automatización y la robótica y clasificación y aplicación de la robótica, Volumen de trabajo
Instituto Tecnológico de Saltillo Cuestionario Robótica Unidad I Temas: antecedentes históricos, relación entre la automatización y la robótica y clasificación y aplicación de la robótica, Volumen de trabajo
Programando con Enchanting
 Programación para robótica Autor Andrés Baranzano Versión Fecha 15/11/12 Ubicación Laboratorios Digitales Índice Introducción...3 Instalación en Windows...3 Instalación en Ubuntu...3 Enchanting para NXT...4
Programación para robótica Autor Andrés Baranzano Versión Fecha 15/11/12 Ubicación Laboratorios Digitales Índice Introducción...3 Instalación en Windows...3 Instalación en Ubuntu...3 Enchanting para NXT...4
Una vez descrita la constitución general de un robot, podemos empezar con la
 CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
ArduLab. 1. Qué te pasa Nerea? 2.Este robot no funciona bien y no sé que le pasa
 5 ArduLab Nerea Iván 1. Qué te pasa Nerea? 2.Este robot no funciona bien y no sé que le pasa 3. Recuerda que puedes usar Ardulab para comprobar el funcionamiento de todas las partes de un robot sin necesidad
5 ArduLab Nerea Iván 1. Qué te pasa Nerea? 2.Este robot no funciona bien y no sé que le pasa 3. Recuerda que puedes usar Ardulab para comprobar el funcionamiento de todas las partes de un robot sin necesidad
CONTROL Y ROBÓTICA. MECANIZACIÓN. Incorporación de máquinas para ejecutar determinadas tareas.
 CONTROL Y ROBÓTICA. MECANIZACIÓN. Incorporación de máquinas para ejecutar determinadas tareas. El propósito no es otro que realizar, de forma automática, una serie de acciones que anteriormente se llevaban
CONTROL Y ROBÓTICA. MECANIZACIÓN. Incorporación de máquinas para ejecutar determinadas tareas. El propósito no es otro que realizar, de forma automática, una serie de acciones que anteriormente se llevaban
Intérprete entre el Operador y el Ordenador.
 Introducción a Windows Generalidades Una computadora es un colaborador rápido y eficaz en la tarea administrativa de la información. La computadora en realidad es capaz de hacer muy pocas cosas, como ser:
Introducción a Windows Generalidades Una computadora es un colaborador rápido y eficaz en la tarea administrativa de la información. La computadora en realidad es capaz de hacer muy pocas cosas, como ser:
Control, Instrumentación e Instalaciones Ingeniería Ambiental
 Control, Instrumentación e Instalaciones Ingeniería Ambiental TEMA 3. LABORATORIO. El Autómata Siemens S7-300. Programación Básica Alfredo Rosado Curso Académico 2010-2011 Control, Instrumentación e Instalaciones.
Control, Instrumentación e Instalaciones Ingeniería Ambiental TEMA 3. LABORATORIO. El Autómata Siemens S7-300. Programación Básica Alfredo Rosado Curso Académico 2010-2011 Control, Instrumentación e Instalaciones.
MECANISMOS. Veamos los distintos tipos de mecanismos que vamos a estudiar uno a uno.
 MECANISMOS En tecnología, cuando se diseña una máquina, lo más normal es que esté movida por un motor, que tiene un movimiento circular, pero a veces no es ese el tipo de movimiento que necesitamos. En
MECANISMOS En tecnología, cuando se diseña una máquina, lo más normal es que esté movida por un motor, que tiene un movimiento circular, pero a veces no es ese el tipo de movimiento que necesitamos. En
TEMA 20 EXP. WINDOWS PROC. DE TEXTOS (1ª PARTE)
") 1. Introducción. TEMA 20 EXP. WINDOWS PROC. DE TEXTOS (1ª PARTE) El Explorador es una herramienta indispensable en un Sistema Operativo ya que con ella se puede organizar y controlar los contenidos (archivos
1. Introducción. TEMA 20 EXP. WINDOWS PROC. DE TEXTOS (1ª PARTE) El Explorador es una herramienta indispensable en un Sistema Operativo ya que con ella se puede organizar y controlar los contenidos (archivos
En este capítulo se describe la forma de cómo se implementó el sistema de video
 En este capítulo se describe la forma de cómo se implementó el sistema de video por medio de una cámara web y un servomecanismo que permitiera al usuario ver un experimento en el mismo instante en que
En este capítulo se describe la forma de cómo se implementó el sistema de video por medio de una cámara web y un servomecanismo que permitiera al usuario ver un experimento en el mismo instante en que
Creado dentro de la línea de sistemas operativos producida por Microsoft Corporation.
 WINDOWS Windows, Es un Sistema Operativo. Creado dentro de la línea de sistemas operativos producida por Microsoft Corporation. Dentro de los tipos de Software es un tipo de software de Sistemas. Windows
WINDOWS Windows, Es un Sistema Operativo. Creado dentro de la línea de sistemas operativos producida por Microsoft Corporation. Dentro de los tipos de Software es un tipo de software de Sistemas. Windows
SERVOMOTORES. Los servos se utilizan frecuentemente en sistemas de radiocontrol, mecatrónicos y robótica, pero su uso no está limitado a estos.
 SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
Manual de guía para Clientes Sistema MoTrack
 Manual de guía para Clientes Sistema MoTrack Contenido 1) introducción 2) Ingresar 3) Principal 4) Mapas 4.1) Mapa de los Móviles 4.2) Mapa de Flota de Móviles 5) Reportes 5.1) Reportes Detallados Reportes
Manual de guía para Clientes Sistema MoTrack Contenido 1) introducción 2) Ingresar 3) Principal 4) Mapas 4.1) Mapa de los Móviles 4.2) Mapa de Flota de Móviles 5) Reportes 5.1) Reportes Detallados Reportes
CONTROL SECCION 002 MONJARAZ
 FCE BUAP CONTROL SECCION 002 PROFESOR: M.C. JAIME CID MONJARAZ REPORTE: ROBOTOTITO (ROBOT LIMPIADOR) INTEGRANTES: LUIS LEAL TOVON MARCO ANTONIO GONZALEZ CASTILLO EDGAR DIAZ TAPIA DAVID JUAREZ CASTILLO
FCE BUAP CONTROL SECCION 002 PROFESOR: M.C. JAIME CID MONJARAZ REPORTE: ROBOTOTITO (ROBOT LIMPIADOR) INTEGRANTES: LUIS LEAL TOVON MARCO ANTONIO GONZALEZ CASTILLO EDGAR DIAZ TAPIA DAVID JUAREZ CASTILLO
MACROS. Automatizar tareas a través del uso de las macros.
 OBJETIVOS MACROS Definiciones Automatizar tareas a través del uso de las macros. Grabar Ejecutar Manipular macros. Tipos de Macros en Excel Introducción Las operaciones tradicionales que se pueden realizar
OBJETIVOS MACROS Definiciones Automatizar tareas a través del uso de las macros. Grabar Ejecutar Manipular macros. Tipos de Macros en Excel Introducción Las operaciones tradicionales que se pueden realizar
Presentaciones. Con el estudio de esta Unidad pretendemos alcanzar los siguientes objetivos:
 UNIDAD 8 Presentaciones Reunión. (ITE. Banco de imágenes) as presentaciones son documentos formados por una sucesión de páginas, llamadas diapositivas, que transmiten información estructurada de manera
UNIDAD 8 Presentaciones Reunión. (ITE. Banco de imágenes) as presentaciones son documentos formados por una sucesión de páginas, llamadas diapositivas, que transmiten información estructurada de manera
Propuesta de Portal de la Red de Laboratorios Virtuales y Remotos de CEA
 Propuesta de Portal de la Red de Laboratorios Virtuales y Remotos de CEA Documento de trabajo elaborado para la Red Temática DocenWeb: Red Temática de Docencia en Control mediante Web (DPI2002-11505-E)
Propuesta de Portal de la Red de Laboratorios Virtuales y Remotos de CEA Documento de trabajo elaborado para la Red Temática DocenWeb: Red Temática de Docencia en Control mediante Web (DPI2002-11505-E)
Capítulo 4 Análisis y diseño del software de los Robots
 Capítulo 4 Análisis y diseño del software de los Robots En el capítulo del diseño mecánico de los robots se muestran los distintos sensores que se utilizarán como entradas, así como los motores que deberán
Capítulo 4 Análisis y diseño del software de los Robots En el capítulo del diseño mecánico de los robots se muestran los distintos sensores que se utilizarán como entradas, así como los motores que deberán
Gestión de Permisos. Bizagi Suite. Copyright 2014 Bizagi
 Gestión de Permisos Bizagi Suite Gestión de Permisos 1 Tabla de Contenido Gestión de Permisos... 3 Definiciones... 3 Rol... 3 Perfil... 3 Permiso... 3 Módulo... 3 Privilegio... 3 Elementos del Proceso...
Gestión de Permisos Bizagi Suite Gestión de Permisos 1 Tabla de Contenido Gestión de Permisos... 3 Definiciones... 3 Rol... 3 Perfil... 3 Permiso... 3 Módulo... 3 Privilegio... 3 Elementos del Proceso...
Este programa mueve cada motor de forma independiente, y cuando termina una línea pasa a la siguiente.
 1 Programa 1 Utilizando el icono añadimos un movimiento a por cada línea de programa. Podremos usar 8 posibles líneas de programa (Base, Hombro, Codo, Muñeca, Pinza, Salida 1, Salida 2 y línea en blanco).
1 Programa 1 Utilizando el icono añadimos un movimiento a por cada línea de programa. Podremos usar 8 posibles líneas de programa (Base, Hombro, Codo, Muñeca, Pinza, Salida 1, Salida 2 y línea en blanco).
Problema B Olonso y los laberintos
 Problema B Olonso y los laberintos El siguiente problema es un entretenido juego donde debes ayudar a Olonso a cumplir diferentes misiones. Nuestro personaje estará atrapado en distintos laberintos y tú
Problema B Olonso y los laberintos El siguiente problema es un entretenido juego donde debes ayudar a Olonso a cumplir diferentes misiones. Nuestro personaje estará atrapado en distintos laberintos y tú
ALGUNAS AYUDAS PARA EL ACCESO AL AULA DIGITAL Contenido
 ALGUNAS AYUDAS PARA EL ACCESO AL AULA DIGITAL Contenido Tabla de contenido 1 INFORMACIÓN PERSONAL... 2 1.1 Cómo ingresar al Aula Digital?... 2 1.2 Qué hacer si olvida su contraseña?... 2 1.3 Qué veo cuando
ALGUNAS AYUDAS PARA EL ACCESO AL AULA DIGITAL Contenido Tabla de contenido 1 INFORMACIÓN PERSONAL... 2 1.1 Cómo ingresar al Aula Digital?... 2 1.2 Qué hacer si olvida su contraseña?... 2 1.3 Qué veo cuando
Sesión 8 Sensor de Ultrasonido
 Sesión 8 Sensor de Ultrasonido FIG. 16.1 - ANIMALES ULTRASÓNICOS. FUENTE: [1] Qué aprenderemos en esta sesión? Recordemos Para esta sesión, necesitaremos un aporte de la sesión pasada, ya que, así como
Sesión 8 Sensor de Ultrasonido FIG. 16.1 - ANIMALES ULTRASÓNICOS. FUENTE: [1] Qué aprenderemos en esta sesión? Recordemos Para esta sesión, necesitaremos un aporte de la sesión pasada, ya que, así como
Modificación y parametrización del modulo de Solicitudes (Request) en el ERP/CRM Compiere.
 en el ERP/CRM Compiere.") UNIVERSIDAD DE CARABOBO FACULTAD DE CIENCIA Y TECNOLOGÍA DIRECCION DE EXTENSION COORDINACION DE PASANTIAS Modificación y parametrización del modulo de Solicitudes (Request) en el ERP/CRM Compiere. Pasante:
UNIVERSIDAD DE CARABOBO FACULTAD DE CIENCIA Y TECNOLOGÍA DIRECCION DE EXTENSION COORDINACION DE PASANTIAS Modificación y parametrización del modulo de Solicitudes (Request) en el ERP/CRM Compiere. Pasante:
CONCEPTOS BASICOS. Febrero 2003 Página - 1/10
 CONCEPTOS BASICOS Febrero 2003 Página - 1/10 EL ESCRITORIO DE WINDOWS Se conoce como escritorio la zona habitual de trabajo con windows, cuando iniciamos windows entramos directamente dentro del escritorio,
CONCEPTOS BASICOS Febrero 2003 Página - 1/10 EL ESCRITORIO DE WINDOWS Se conoce como escritorio la zona habitual de trabajo con windows, cuando iniciamos windows entramos directamente dentro del escritorio,
Tutorial de herramientas de Google
 Tutorial de herramientas de Google Elizabeth Fons y Maximiliano Geier 1. Introducción En este tutorial les vamos a contar cómo utilizar algunas de las herramientas de trabajo colaborativo que ofrece gratuitamente
Tutorial de herramientas de Google Elizabeth Fons y Maximiliano Geier 1. Introducción En este tutorial les vamos a contar cómo utilizar algunas de las herramientas de trabajo colaborativo que ofrece gratuitamente
Sesión 3 - Movimiento Diferencial
 Sesión 3 - Movimiento Diferencial Qué aprenderemos en esta sesión? Para entender como nuestro robot se va a desplazar por cualquier superficie, debemos aprender la manera en que lo hace, por eso, en esta
Sesión 3 - Movimiento Diferencial Qué aprenderemos en esta sesión? Para entender como nuestro robot se va a desplazar por cualquier superficie, debemos aprender la manera en que lo hace, por eso, en esta
Notas para la instalación de un lector de tarjetas inteligentes.
 Notas para la instalación de un lector de tarjetas inteligentes. Índice 0. Obtención de todo lo necesario para la instalación. 3 1. Comprobación del estado del servicio Tarjeta inteligente. 4 2. Instalación
Notas para la instalación de un lector de tarjetas inteligentes. Índice 0. Obtención de todo lo necesario para la instalación. 3 1. Comprobación del estado del servicio Tarjeta inteligente. 4 2. Instalación
Escritorio remoto y VPN. Cómo conectarse desde Windows 7
 Escritorio remoto y VPN. Cómo conectarse desde Windows 7 Hay ocasiones en las que es necesario conectarnos a un equipo informático situado a mucha distancia de donde nos encontramos para realizar sobre
Escritorio remoto y VPN. Cómo conectarse desde Windows 7 Hay ocasiones en las que es necesario conectarnos a un equipo informático situado a mucha distancia de donde nos encontramos para realizar sobre
CAPÍTULO 3 Programación en LabVIEW
 CAPÍTULO 3 Programación en LabVIEW 3.1 Conexión física de los elementos Para capturar todas las señales provenientes de los sensores se utilizó una tarjeta de adquisición de datos de National Instruments,
CAPÍTULO 3 Programación en LabVIEW 3.1 Conexión física de los elementos Para capturar todas las señales provenientes de los sensores se utilizó una tarjeta de adquisición de datos de National Instruments,
Web Publishing con LabVIEW (I)
") 1 Web Publishing con LabVIEW (I) Una de las herramientas más útiles de LabVIEW es el Web Publishing. Gracias a esta utilidad podemos subir nuestras creaciones a Internet, para mostrar por ejemplo resultados
1 Web Publishing con LabVIEW (I) Una de las herramientas más útiles de LabVIEW es el Web Publishing. Gracias a esta utilidad podemos subir nuestras creaciones a Internet, para mostrar por ejemplo resultados
Actividades con GeoGebra
 Conectar Igualdad - "Netbooks Uno a Uno" Actividades con GeoGebra Nociones básicas, rectas Silvina Ponce Dawson Introducción. El GeoGeobra es un programa que permite explorar nociones matemáticas desde
Conectar Igualdad - "Netbooks Uno a Uno" Actividades con GeoGebra Nociones básicas, rectas Silvina Ponce Dawson Introducción. El GeoGeobra es un programa que permite explorar nociones matemáticas desde
Cómo creo las bandejas del Registro de Entrada /Salida y de Gestión de Expedientes?
 Preguntas frecuentes Cómo creo las bandejas del Registro de Entrada /Salida y de Gestión de Expedientes? Atención! Esta opción es de configuración y solamente la prodrá realizar el administrador de la
Preguntas frecuentes Cómo creo las bandejas del Registro de Entrada /Salida y de Gestión de Expedientes? Atención! Esta opción es de configuración y solamente la prodrá realizar el administrador de la
Manual básico de Robomid
 Manual básico de Robomid Elaborado por: Daniel Gónzález Índice 1. Introducción a Robomind... 3 2. Uso del programa Robomind 2.6... 7 3. Ejercicios... 9-2- 1. Introducción a Robomind 1.1. Introdución Robo
Manual básico de Robomid Elaborado por: Daniel Gónzález Índice 1. Introducción a Robomind... 3 2. Uso del programa Robomind 2.6... 7 3. Ejercicios... 9-2- 1. Introducción a Robomind 1.1. Introdución Robo
MANUAL DE AYUDA. SAT Móvil (Movilidad del Servicio Técnico)
") MANUAL DE AYUDA SAT Móvil (Movilidad del Servicio Técnico) Fecha última revisión: Abril 2015 INDICE DE CONTENIDOS INTRODUCCION SAT Móvil... 3 CONFIGURACIONES PREVIAS EN GOTELGEST.NET... 4 1. INSTALACIÓN
MANUAL DE AYUDA SAT Móvil (Movilidad del Servicio Técnico) Fecha última revisión: Abril 2015 INDICE DE CONTENIDOS INTRODUCCION SAT Móvil... 3 CONFIGURACIONES PREVIAS EN GOTELGEST.NET... 4 1. INSTALACIÓN
Mando a distancia. Manual en español. Última actualización: 01.10.04
 Mando a distancia Manual en español Última actualización: 01.10.04 Contenido El editor del control remoto... 3 Instalación... 3 El menú... 4 Los conjuntos de órdenes... 5 1. Seleccionar una aplicación...
Mando a distancia Manual en español Última actualización: 01.10.04 Contenido El editor del control remoto... 3 Instalación... 3 El menú... 4 Los conjuntos de órdenes... 5 1. Seleccionar una aplicación...
Ajustes del Curso en egela (Moodle 2.5)
") Ajustes del Curso en egela (Moodle 2.5) Manual para el profesorado Versión 2 (12/05/2015) El presente manual ha sido desarrollado por el Campus Virtual de la Universidad del País Vasco / Euskal Herriko
Ajustes del Curso en egela (Moodle 2.5) Manual para el profesorado Versión 2 (12/05/2015) El presente manual ha sido desarrollado por el Campus Virtual de la Universidad del País Vasco / Euskal Herriko
Tutorial de Introducción a la Informática Tema 0 Windows. Windows. 1. Objetivos
 1. Objetivos Este tema de introducción es el primero que debe seguir un alumno para asegurar que conoce los principios básicos de informática, como el manejo elemental del ratón y el teclado para gestionar
1. Objetivos Este tema de introducción es el primero que debe seguir un alumno para asegurar que conoce los principios básicos de informática, como el manejo elemental del ratón y el teclado para gestionar
Capítulo 10 164. En la sección anterior se explicó el diseño, construcción y programación del
 Capítulo 10 164 CAPÍTULO DIEZ: PRUEBAS Y RESULTADOS En la sección anterior se explicó el diseño, construcción y programación del prototipo neumático de prótesis de pierna humana. Como se mencionó el prototipo
Capítulo 10 164 CAPÍTULO DIEZ: PRUEBAS Y RESULTADOS En la sección anterior se explicó el diseño, construcción y programación del prototipo neumático de prótesis de pierna humana. Como se mencionó el prototipo
UNIVERSIDAD TECNICA DEL NORTE
 UNIVERSIDAD TECNICA DEL NORTE FACULTAD DE INGENIERIA EN CIENCIAS APLICADAS ESCUELA DE INGENIERIA EN SISTEMAS COMPUTACIONALES MANUEL DE USUARIO TEMA: SISTEMA INFORMÁTICO PARA LA PROMOCIÓN Y PUBLICIDAD DE
UNIVERSIDAD TECNICA DEL NORTE FACULTAD DE INGENIERIA EN CIENCIAS APLICADAS ESCUELA DE INGENIERIA EN SISTEMAS COMPUTACIONALES MANUEL DE USUARIO TEMA: SISTEMA INFORMÁTICO PARA LA PROMOCIÓN Y PUBLICIDAD DE
DOCUMENTOS COMPARTIDOS CON GOOGLE DOCS
 DOCUMENTOS COMPARTIDOS CON GOOGLE DOCS 1. Introducción Los ambientes de aprendizaje acompañados de trabajos colaborativos como estrategia se revierten en actividades de diferente índole (análisis de videos,
DOCUMENTOS COMPARTIDOS CON GOOGLE DOCS 1. Introducción Los ambientes de aprendizaje acompañados de trabajos colaborativos como estrategia se revierten en actividades de diferente índole (análisis de videos,
CRUCIGRAMA #1 HORIZONTAL VERTICAL
 CRUCIGRAMA #1 HORIZONTAL 2. Controla y procesa todas las operaciones dentro del PLC 6. Patento el PLC en 1974. 8. Son dispositivos eléctricos y/o mecánicos que convierten magnitudes físicas en una señal
CRUCIGRAMA #1 HORIZONTAL 2. Controla y procesa todas las operaciones dentro del PLC 6. Patento el PLC en 1974. 8. Son dispositivos eléctricos y/o mecánicos que convierten magnitudes físicas en una señal
REPORTE DE AUDITORÍA DE FÁBRICA
 REPORTE DE AUDITORÍA DE FÁBRICA Cliente Proveedor Fecha de visita XXXXXXXXXXXXXX XXXXXXXXXXXXXX XXXXXXXXXXXXXX Introducción El día XX de XX de 20XX los auditores de ChinaService visitaron instalaciones
REPORTE DE AUDITORÍA DE FÁBRICA Cliente Proveedor Fecha de visita XXXXXXXXXXXXXX XXXXXXXXXXXXXX XXXXXXXXXXXXXX Introducción El día XX de XX de 20XX los auditores de ChinaService visitaron instalaciones
Manual del Usuario de NOVIT GPS. Le llegará un Email como éste. Nombre completo;
 Manual del Usuario de NOVIT GPS. Le llegará un Email como éste. Nombre completo; Gracias por registrarse en NOVIT GPS. Con esta cuenta podrá monitorear sus dispositivos GPS. En este link confirma su alta
Manual del Usuario de NOVIT GPS. Le llegará un Email como éste. Nombre completo; Gracias por registrarse en NOVIT GPS. Con esta cuenta podrá monitorear sus dispositivos GPS. En este link confirma su alta
Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes
 Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes RESUMEN Investigadores de la Universidad
Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes Oferta tecnológica: Vehículos autónomos para transporte de materiales en almacenes RESUMEN Investigadores de la Universidad
Centro de Enseñanza: I.E.S. Nuevo Milenio C/Blas Infante s/n 21640 Zalamea La Real (Huelva)
") III Concurso de Proyectos de Ingeniería de la ETSI (Proyecta tu futuro). Título: Dosificador de pastillas: Se trata de un aparato controlado por un cerebro de robot Lego NXT que su principal función, es
III Concurso de Proyectos de Ingeniería de la ETSI (Proyecta tu futuro). Título: Dosificador de pastillas: Se trata de un aparato controlado por un cerebro de robot Lego NXT que su principal función, es
Para poder navegar en Internet debes primeramente elegir el navegador que vas a utilizar, que puede ser:
 Módulo 2 Herramientas para la búsqueda virtual en Internet Navegadores Web Para establecer conexiones con los servidores electrónicos y obtener la información y los servicios que éstos prestan, el usuario
Módulo 2 Herramientas para la búsqueda virtual en Internet Navegadores Web Para establecer conexiones con los servidores electrónicos y obtener la información y los servicios que éstos prestan, el usuario
Una computadora de cualquier forma que se vea tiene dos tipos de componentes: El Hardware y el Software.
 ARQUITECTURA DE LAS COMPUTADORAS QUE ES UNA COMPUTADORA (UN ORDENADOR)? Existen numerosas definiciones de una computadora, entre ellas las siguientes: 1) Una computadora es un dispositivo capaz de realizar
ARQUITECTURA DE LAS COMPUTADORAS QUE ES UNA COMPUTADORA (UN ORDENADOR)? Existen numerosas definiciones de una computadora, entre ellas las siguientes: 1) Una computadora es un dispositivo capaz de realizar
AUTOMATIZACIÓN INDUSTRIAL
 2º I.T.I. Electrónica Industrial AUTOMATIZACIÓN INDUSTRIAL PRÁCTICAS PRÁCTICA 1 El objetivo que se pretende con esta práctica es la familiarización con el autómata Simatic S7-200 así como con el programa
2º I.T.I. Electrónica Industrial AUTOMATIZACIÓN INDUSTRIAL PRÁCTICAS PRÁCTICA 1 El objetivo que se pretende con esta práctica es la familiarización con el autómata Simatic S7-200 así como con el programa
"Diseño, construcción e implementación de modelos matemáticos para el control automatizado de inventarios
 "Diseño, construcción e implementación de modelos matemáticos para el control automatizado de inventarios Miguel Alfonso Flores Sánchez 1, Fernando Sandoya Sanchez 2 Resumen En el presente artículo se
"Diseño, construcción e implementación de modelos matemáticos para el control automatizado de inventarios Miguel Alfonso Flores Sánchez 1, Fernando Sandoya Sanchez 2 Resumen En el presente artículo se
Fig. 3.1 Brazo Mecánico Utilizado. que es capaz de girar igualmente 180º, (Fig. 3.1).
.") Capítulo 3 El Brazo Mecánico. En este capítulo se hablará de los aspectos generales del robot, en cuanto a su arquitectura respecta. Es importante dar crédito al Ing. Luís Maus Bolaños del departamento
Capítulo 3 El Brazo Mecánico. En este capítulo se hablará de los aspectos generales del robot, en cuanto a su arquitectura respecta. Es importante dar crédito al Ing. Luís Maus Bolaños del departamento
Curso de Iniciación a la Micro- Robótica. SigBot ACM Capítulo de estudiantes
 Curso de Iniciación a la Micro- Robótica SigBot ACM Capítulo de estudiantes Micro-robótica? La micro-robótica es la parte de la robótica que crea los robots más económicos y de fácil construcción para
Curso de Iniciación a la Micro- Robótica SigBot ACM Capítulo de estudiantes Micro-robótica? La micro-robótica es la parte de la robótica que crea los robots más económicos y de fácil construcción para
Capítulo 9. Archivos de sintaxis
 Capítulo 9 Archivos de sintaxis El SPSS permite generar y editar archivos de texto con sintaxis SPSS, es decir, archivos de texto con instrucciones de programación en un lenguaje propio del SPSS. Esta
Capítulo 9 Archivos de sintaxis El SPSS permite generar y editar archivos de texto con sintaxis SPSS, es decir, archivos de texto con instrucciones de programación en un lenguaje propio del SPSS. Esta
AM 1300 MANUAL DE MANEJO
 AM 1300 MANUAL DE MANEJO Felicitaciones por haber adquirido un sistema de alarma NEMESIS, fabricado con la más avanzada tecnología y un riguroso control de calidad, que cuenta con características que brindará
AM 1300 MANUAL DE MANEJO Felicitaciones por haber adquirido un sistema de alarma NEMESIS, fabricado con la más avanzada tecnología y un riguroso control de calidad, que cuenta con características que brindará
INTRODUCCION A LA PROGRAMACION DE PLC
 INTRODUCCION A LA PROGRAMACION DE PLC Esta guía se utilizará para estudiar la estructura general de programación de um PLC Instrucciones y Programas Una instrucción u orden de trabajo consta de dos partes
INTRODUCCION A LA PROGRAMACION DE PLC Esta guía se utilizará para estudiar la estructura general de programación de um PLC Instrucciones y Programas Una instrucción u orden de trabajo consta de dos partes
LiLa Portal Guía para profesores
 Library of Labs Lecturer s Guide LiLa Portal Guía para profesores Se espera que los profesores se encarguen de gestionar el aprendizaje de los alumnos, por lo que su objetivo es seleccionar de la lista
Library of Labs Lecturer s Guide LiLa Portal Guía para profesores Se espera que los profesores se encarguen de gestionar el aprendizaje de los alumnos, por lo que su objetivo es seleccionar de la lista
Como verás pone Microsoft Office y si te colocas sobre esta línea debería salir:
 :: Introducción: Microsoft dispone de un conjunto de herramientas llamado Office que se compone de todo lo necesario para resolver cuantos problemas se presenten en los trabajos propios de cualquier usuario
:: Introducción: Microsoft dispone de un conjunto de herramientas llamado Office que se compone de todo lo necesario para resolver cuantos problemas se presenten en los trabajos propios de cualquier usuario
Capítulo 5. Análisis del software del simulador del sistema de seguridad
 1 Capítulo 5. Análisis del software del simulador del sistema de seguridad Para realizar análisis del simulador de sistema de seguridad se recurrió a diagramas de flujo de datos (DFD s), ya que se consideró
1 Capítulo 5. Análisis del software del simulador del sistema de seguridad Para realizar análisis del simulador de sistema de seguridad se recurrió a diagramas de flujo de datos (DFD s), ya que se consideró
PRÁCTICAS CON ROBOMIND. PARTE 1.
 PRÁCTICAS CON ROBOMIND. PARTE 1. Robomind Cuando lo tengas instalado mueve el ratón por los diferentes botones y te saldrá una descripción para lo que sirve cada uno. Es muy sencillo, no te olvides los
PRÁCTICAS CON ROBOMIND. PARTE 1. Robomind Cuando lo tengas instalado mueve el ratón por los diferentes botones y te saldrá una descripción para lo que sirve cada uno. Es muy sencillo, no te olvides los
Manual de usuario de Parda Programa de Almacenamiento y Recuperación de Datos Automático
 Programa de Almacenamiento y Recuperación de Datos Automático CONSEJERÍA DE EDUCACIÓN Dirección General de Participación e Innovación Educativa Centro de Gestión Avanzado de Centros TIC Fecha: 20/04/10
Programa de Almacenamiento y Recuperación de Datos Automático CONSEJERÍA DE EDUCACIÓN Dirección General de Participación e Innovación Educativa Centro de Gestión Avanzado de Centros TIC Fecha: 20/04/10
TEMA 4: EMPEZANDO A NAVEGAR ESCUELA UNIVERSITARIA DE INFORMÁTICA. Raúl Martín Martín
 TEMA 4: EMPEZANDO A ESCUELA UNIVERSITARIA DE INFORMÁTICA NAVEGAR Raúl Martín Martín SERVICIOS DE INTERNET SERVICIOS DE INTERNET Las posibilidades que ofrece Internet se denominan servicios. Hoy en día,
TEMA 4: EMPEZANDO A ESCUELA UNIVERSITARIA DE INFORMÁTICA NAVEGAR Raúl Martín Martín SERVICIOS DE INTERNET SERVICIOS DE INTERNET Las posibilidades que ofrece Internet se denominan servicios. Hoy en día,
REDES DE COMPUTADORES Laboratorio
 1nsloo.cl REDES DE COMPUTADORES Laboratorio Introducción a Cisco Packet Tracer Curso 2014/15 1. INTRODUCCIÓN Cisco Packet Tracer es un software propiedad de Cisco System, Inc., diseñado para la simulación
1nsloo.cl REDES DE COMPUTADORES Laboratorio Introducción a Cisco Packet Tracer Curso 2014/15 1. INTRODUCCIÓN Cisco Packet Tracer es un software propiedad de Cisco System, Inc., diseñado para la simulación
Manual de Microsoft Power Point 2007 Parte 2 Universidad Politécnica de San Luis Potosí
 Contenido: Manual de Microsoft Power Point 2007 Parte 2 1. Insertar y dar formato a los cuadros de texto.... 2 2. Insertar cuadros de texto.... 2 3. Estilos de forma - Contornos y colores.... 3 4. Estilos
Contenido: Manual de Microsoft Power Point 2007 Parte 2 1. Insertar y dar formato a los cuadros de texto.... 2 2. Insertar cuadros de texto.... 2 3. Estilos de forma - Contornos y colores.... 3 4. Estilos
Mesa de Ayuda Interna
 Mesa de Ayuda Interna Documento de Construcción Mesa de Ayuda Interna 1 Tabla de Contenido Proceso De Mesa De Ayuda Interna... 2 Diagrama Del Proceso... 3 Modelo De Datos... 4 Entidades Del Sistema...
Mesa de Ayuda Interna Documento de Construcción Mesa de Ayuda Interna 1 Tabla de Contenido Proceso De Mesa De Ayuda Interna... 2 Diagrama Del Proceso... 3 Modelo De Datos... 4 Entidades Del Sistema...
Edición de vídeo con movie maker Autor: Jhon Gilberto Sánchez
 Edición de vídeo con movie maker Autor: Jhon Gilberto Sánchez 1 Presentación del curso La forma más sencilla de editar todos aquellos momentos especiales o dar un toque personal a las fotografías creando
Edición de vídeo con movie maker Autor: Jhon Gilberto Sánchez 1 Presentación del curso La forma más sencilla de editar todos aquellos momentos especiales o dar un toque personal a las fotografías creando
Capítulo 4. Implementación del lenguaje multitáctil
 Capítulo 4. Implementación del lenguaje multitáctil En este capítulo se presenta como fue diseñado y desarrollado el servicio de ademanes multitáctiles. Se presentan la arquitectura general del sistema,
Capítulo 4. Implementación del lenguaje multitáctil En este capítulo se presenta como fue diseñado y desarrollado el servicio de ademanes multitáctiles. Se presentan la arquitectura general del sistema,
Sesión No. 10. Contextualización: Nombre de la sesión: ClickBalance segunda parte PAQUETERÍA CONTABLE
 Paquetería contable 1 Sesión No. 10 Nombre de la sesión: ClickBalance segunda parte Contextualización: Como complemento de este sistema a las demás áreas operativas de una empresa como son recursos humanos,
Paquetería contable 1 Sesión No. 10 Nombre de la sesión: ClickBalance segunda parte Contextualización: Como complemento de este sistema a las demás áreas operativas de una empresa como son recursos humanos,
Autor: Microsoft Licencia: Cita Fuente: Ayuda de Windows
 Qué es Recuperación? Recuperación del Panel de control proporciona varias opciones que pueden ayudarle a recuperar el equipo de un error grave. Nota Antes de usar Recuperación, puede probar primero uno
Qué es Recuperación? Recuperación del Panel de control proporciona varias opciones que pueden ayudarle a recuperar el equipo de un error grave. Nota Antes de usar Recuperación, puede probar primero uno
Manual de usuario para Android de la aplicación PORTAFIRMAS MÓVIL
 Manual de usuario para Android de la aplicación PORTAFIRMAS MÓVIL Índice 1 Introducción... 5 1.1 Perfil de la aplicación... 5 1.2 Requisitos técnicos... 5 2 Manual de usuario... 7 2.1 Instalación del certificado...
Manual de usuario para Android de la aplicación PORTAFIRMAS MÓVIL Índice 1 Introducción... 5 1.1 Perfil de la aplicación... 5 1.2 Requisitos técnicos... 5 2 Manual de usuario... 7 2.1 Instalación del certificado...
Manual de Usuario Módulo de Registro de Vehículos
 Introducción. Este manual pretende ser una guía en el uso del Módulo de Registro de Vehículos (MRV). En su contenido podremos observar los aspectos más esenciales para poder utilizar de una manera muy
Introducción. Este manual pretende ser una guía en el uso del Módulo de Registro de Vehículos (MRV). En su contenido podremos observar los aspectos más esenciales para poder utilizar de una manera muy
Robótica: cuerpo y alma
 Robótica: cuerpo y alma Daniela López De Luise * y Marcela L. Riccillo ** De Robótica se habló por mucho tiempo. Se suponía que el siglo XXI nos iba a encontrar rodeados de robots, pensados por el imaginario
Robótica: cuerpo y alma Daniela López De Luise * y Marcela L. Riccillo ** De Robótica se habló por mucho tiempo. Se suponía que el siglo XXI nos iba a encontrar rodeados de robots, pensados por el imaginario
6-REGISTROS DEL 8086 Y DEL 80286
 ESTRUCTURA DE COMPUTADORES I (Capítulo 6: Los registros del microprocesador 8086) 1/7 6-REGISTROS DEL 8086 Y DEL 80286 6.1 INTRODUCCIÓN: Dentro del procesador existen unos contenedores especiales de 16
ESTRUCTURA DE COMPUTADORES I (Capítulo 6: Los registros del microprocesador 8086) 1/7 6-REGISTROS DEL 8086 Y DEL 80286 6.1 INTRODUCCIÓN: Dentro del procesador existen unos contenedores especiales de 16
Operación de Microsoft Excel
 Representación gráfica de datos Generalidades Excel puede crear gráficos a partir de datos previamente seleccionados en una hoja de cálculo. El usuario puede incrustar un gráfico en una hoja de cálculo,
Representación gráfica de datos Generalidades Excel puede crear gráficos a partir de datos previamente seleccionados en una hoja de cálculo. El usuario puede incrustar un gráfico en una hoja de cálculo,
MANUAL DE USUARIO ZEBRA ELECTRÓNICA SOFTWARE CONTROL DE ASISTENCIA Y TIEMPOS SCAT REMOTO CON USB. www.zebraelectronica.com
 MANUAL DE USUARIO SOFTWARE CONTROL DE ASISTENCIA Y TIEMPOS SCAT REMOTO CON USB ZEBRA ELECTRÓNICA 2 ÍNDICE MANUAL DE USUARIO SOFTWARE CONTROL DE ASISTENCIA Y TIEMPOS SCAT REMOTO CON LECTOR BIOMÉTRICO USB
MANUAL DE USUARIO SOFTWARE CONTROL DE ASISTENCIA Y TIEMPOS SCAT REMOTO CON USB ZEBRA ELECTRÓNICA 2 ÍNDICE MANUAL DE USUARIO SOFTWARE CONTROL DE ASISTENCIA Y TIEMPOS SCAT REMOTO CON LECTOR BIOMÉTRICO USB
Escuela Secundaria Técnica No. 36. Ing. Manuel Moreno Torres. Mano Robótica
 Escuela Secundaria Técnica No. 36 Ing. Manuel Moreno Torres Mano Robótica Asesor: Alberto Sandoval García Énfasis: Mini robótica Grado: 2 Integrantes: Cruz Pérez Héctor Garay Cruz Isis Yoatzín Gómez Gutiérrez
Escuela Secundaria Técnica No. 36 Ing. Manuel Moreno Torres Mano Robótica Asesor: Alberto Sandoval García Énfasis: Mini robótica Grado: 2 Integrantes: Cruz Pérez Héctor Garay Cruz Isis Yoatzín Gómez Gutiérrez
AUTOMATIZACION. Reconocer la arquitectura y características de un PLC Diferenciar los tipos de entradas y salidas
 AUTOMATIZACION GUIA DE TRABAJO 2 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Reconocer la arquitectura
AUTOMATIZACION GUIA DE TRABAJO 2 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Reconocer la arquitectura
PENTA MANUAL DE USUARIO
 PENTA MANUAL DE USUARIO TECLADOS. Los teclados se instalan normalmente cerca de las áreas de entrada/ salida de su casa ó establecimiento comercial, con el fin de hacer más cómodo el armado y desarmado
PENTA MANUAL DE USUARIO TECLADOS. Los teclados se instalan normalmente cerca de las áreas de entrada/ salida de su casa ó establecimiento comercial, con el fin de hacer más cómodo el armado y desarmado
Trabajo de Microrrobots: SENSORES DE MEDIDA POR CONTACTO
 Trabajo de Microrrobots: SENSORES DE MEDIDA POR CONTACTO PRINCIPIO DE FUNCIONAMIENTO DE LOS SENSORES DE CONTACTO TIPOS DE SENSORES DE CONTACTO ALGUNOS DISPOSITIVOS COMERCIALES DE SENSORES DE CONTACTO APLICACIÓN
Trabajo de Microrrobots: SENSORES DE MEDIDA POR CONTACTO PRINCIPIO DE FUNCIONAMIENTO DE LOS SENSORES DE CONTACTO TIPOS DE SENSORES DE CONTACTO ALGUNOS DISPOSITIVOS COMERCIALES DE SENSORES DE CONTACTO APLICACIÓN
Versión 1.0.1. 2014 Telefónica. Todos los derechos reservados. http://telefonica.com.ar
 Versión 1.0.1 2014 Telefónica. Todos los derechos reservados. http://telefonica.com.ar 1 1 Índice 1 Índice... 2 2 Terabox... 3 3 Instalación de Terabox... 4 4 Configuración y uso de los componentes Terabox...
Versión 1.0.1 2014 Telefónica. Todos los derechos reservados. http://telefonica.com.ar 1 1 Índice 1 Índice... 2 2 Terabox... 3 3 Instalación de Terabox... 4 4 Configuración y uso de los componentes Terabox...
Índice Objetivo... 2 Definición y utilidad de Movie Maker... 3 Cómo iniciar Movie Maker?... 3 Elementos de la ventana de Movie Maker...
 Índice Objetivo... 2 Definición y utilidad de Movie Maker... 3 Cómo iniciar Movie Maker?... 3 Elementos de la ventana de Movie Maker... 4 Barra de título... 4 Barra o pestañas de opciones... 4 Cinta de
Índice Objetivo... 2 Definición y utilidad de Movie Maker... 3 Cómo iniciar Movie Maker?... 3 Elementos de la ventana de Movie Maker... 4 Barra de título... 4 Barra o pestañas de opciones... 4 Cinta de
MANUAL DE AYUDA WEB SAT GOTELGEST.NET
 MANUAL DE AYUDA WEB SAT GOTELGEST.NET Fecha última revisión: Agosto 2015 INDICE DE CONTENIDOS INTRODUCCION WEB SAT... 3 CONFIGURACIONES PREVIAS EN GOTELGEST.NET... 4 1. INSTALACIÓN DEL SERVICIO... 4 2.
MANUAL DE AYUDA WEB SAT GOTELGEST.NET Fecha última revisión: Agosto 2015 INDICE DE CONTENIDOS INTRODUCCION WEB SAT... 3 CONFIGURACIONES PREVIAS EN GOTELGEST.NET... 4 1. INSTALACIÓN DEL SERVICIO... 4 2.
UNIVERSIDAD DE SALAMANCA
 UNIVERSIDAD DE SALAMANCA FACULTAD DE CIENCIAS INGENIERÍA TÉCNICA EN INFORMÁTICA DE SISTEMAS Resumen del trabajo práctico realizado para la superación de la asignatura Proyecto Fin de Carrera. TÍTULO SISTEMA
UNIVERSIDAD DE SALAMANCA FACULTAD DE CIENCIAS INGENIERÍA TÉCNICA EN INFORMÁTICA DE SISTEMAS Resumen del trabajo práctico realizado para la superación de la asignatura Proyecto Fin de Carrera. TÍTULO SISTEMA
CURSO 2010-2011 TECNOLOGÍA TECNOLOGÍA 4º ESO TEMA 5: Lógica binaria. Tecnología 4º ESO Tema 5: Lógica binaria Página 1
 Tecnología 4º ESO Tema 5: Lógica binaria Página 1 4º ESO TEMA 5: Lógica binaria Tecnología 4º ESO Tema 5: Lógica binaria Página 2 Índice de contenido 1. Señales analógicas y digitales...3 2. Código binario,
Tecnología 4º ESO Tema 5: Lógica binaria Página 1 4º ESO TEMA 5: Lógica binaria Tecnología 4º ESO Tema 5: Lógica binaria Página 2 Índice de contenido 1. Señales analógicas y digitales...3 2. Código binario,
UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3
 UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3 INTRODUCCIÓN El elemento hardware de un sistema básico de proceso de datos se puede estructurar en tres partes claramente diferenciadas en cuanto a sus funciones:
UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3 INTRODUCCIÓN El elemento hardware de un sistema básico de proceso de datos se puede estructurar en tres partes claramente diferenciadas en cuanto a sus funciones:
Facturación Automática de Ventas WhitePaper Noviembre de 2006
 Facturación Automática de Ventas WhitePaper Noviembre de 2006 Contenidos 1. Propósito 3 2. Particularidades del asistente 3 2.1. Accesos en PrefGest 3 2.2. Requisitos de los documentos a albaranar / facturar
Facturación Automática de Ventas WhitePaper Noviembre de 2006 Contenidos 1. Propósito 3 2. Particularidades del asistente 3 2.1. Accesos en PrefGest 3 2.2. Requisitos de los documentos a albaranar / facturar
CAPÍTULO II. Gráficos Dinámicos.
 2.1 Definición. Los gráficos dinámicos son representaciones a escala del proceso, en donde se muestra la información de las variables del proceso a través de datos numéricos y de animación gráfica. Éstos
2.1 Definición. Los gráficos dinámicos son representaciones a escala del proceso, en donde se muestra la información de las variables del proceso a través de datos numéricos y de animación gráfica. Éstos
AUTOMATIZACION. Identificar los grados de automatización y los tipos de accionamientos Definición de un controlador lógico programable
 AUTOMATIZACION GUIA DE TRABAJO 1 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Identificar los grados
AUTOMATIZACION GUIA DE TRABAJO 1 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Identificar los grados
Base de datos en Excel
 Base de datos en Excel Una base datos es un conjunto de información que ha sido organizado bajo un mismo contexto y se encuentra almacenada y lista para ser utilizada en cualquier momento. Las bases de
Base de datos en Excel Una base datos es un conjunto de información que ha sido organizado bajo un mismo contexto y se encuentra almacenada y lista para ser utilizada en cualquier momento. Las bases de
REGISTRO DE PEDIDOS DE CLIENTES MÓDULO DE TOMA DE PEDIDOS E INTEGRACIÓN CON ERP
 REGISTRO DE PEDIDOS DE CLIENTES MÓDULO DE TOMA DE PEDIDOS E INTEGRACIÓN CON ERP Visual Sale posee módulos especializados para el método de ventas transaccional, donde el pedido de parte de un nuevo cliente
REGISTRO DE PEDIDOS DE CLIENTES MÓDULO DE TOMA DE PEDIDOS E INTEGRACIÓN CON ERP Visual Sale posee módulos especializados para el método de ventas transaccional, donde el pedido de parte de un nuevo cliente
Implementando un ERP La Gestión del Cambio
 Artículos> Implementando un ERP - La Gestión del Cambio Artículo Implementando un ERP La Gestión del Cambio 1 Contenido Sumario Ejecutivo 3 Los sistemas ERP flexibilizan la gestión de la empresa y su cadena
Artículos> Implementando un ERP - La Gestión del Cambio Artículo Implementando un ERP La Gestión del Cambio 1 Contenido Sumario Ejecutivo 3 Los sistemas ERP flexibilizan la gestión de la empresa y su cadena
1 Itinerario. 2 Descripción y funcionalidades principales. Google Docs. 1.1 Qué vamos a hacer? 1.2 Qué pasos vamos a seguir?
 Google Docs 1 Itinerario 1.1 Qué vamos a hacer? En este tutorial aprendemos a manejar la herramienta Google Docs, de esta forma nos introduciremos en el llamado cloud computing, que podemos traducir como,
Google Docs 1 Itinerario 1.1 Qué vamos a hacer? En este tutorial aprendemos a manejar la herramienta Google Docs, de esta forma nos introduciremos en el llamado cloud computing, que podemos traducir como,
App para realizar consultas al Sistema de Información Estadística de Castilla y León
 App para realizar consultas al Sistema de Información Estadística de Castilla y León Jesús M. Rodríguez Rodríguez rodrodje@jcyl.es Dirección General de Presupuestos y Estadística Consejería de Hacienda
App para realizar consultas al Sistema de Información Estadística de Castilla y León Jesús M. Rodríguez Rodríguez rodrodje@jcyl.es Dirección General de Presupuestos y Estadística Consejería de Hacienda
Como detectar conexión del Servidor y SQL?
 Como detectar conexión del Servidor y SQL? Existen muchos mensajes que suelen aparecer cuando se ejecuta el sistema y este no puede establecer una comunicación adecuada con el servidor y/o la base de datos
Como detectar conexión del Servidor y SQL? Existen muchos mensajes que suelen aparecer cuando se ejecuta el sistema y este no puede establecer una comunicación adecuada con el servidor y/o la base de datos
Operación Microsoft Windows
 Entornos de red Concepto de red En el nivel más elemental, una red consiste en dos equipos conectados entre sí mediante un cable de forma tal que puedan compartir datos. Todas las redes, no importa lo
Entornos de red Concepto de red En el nivel más elemental, una red consiste en dos equipos conectados entre sí mediante un cable de forma tal que puedan compartir datos. Todas las redes, no importa lo