CONTROL Y ROBÓTICA. MECANIZACIÓN. Incorporación de máquinas para ejecutar determinadas tareas.
|
|
|
- Claudia Cuenca Rojas
- hace 8 años
- Vistas:
Transcripción
1 CONTROL Y ROBÓTICA. MECANIZACIÓN. Incorporación de máquinas para ejecutar determinadas tareas. El propósito no es otro que realizar, de forma automática, una serie de acciones que anteriormente se llevaban a cabo de modo manual. El resultado final es una mayor rapidez en el trabajo y, en determinados casos, una mejor calidad en el resultado. AUTOMATIZACIÓN. Consiste en eliminar de forma parcial o total, la intervención de personas en la ejecución del trabajo. La máquinas automáticas pueden repetir continuamente la acción para la que están diseñadas, pero sin posibilidad de variar su funcionamiento.. Las consecuencias más directas son el aumento de la productividad y la realización de tareas desagradables o peligrosas sin participación humana. ROBOTIZACIÓN. Es también una automatización pues no intervienen personas, pero en este caso las máquinas utilizadas son capaces de realizar diferentes acciones según se las programe; además serán capaces de captar información de su alrededor y procesarla, para variar posteriormente su acción en función del resultado obtenido. ROBOT. Máquina o ingenio electrónico programable, capaz de manipular objetos y realizar operaciones antes reservadas solo a las personas. ROBÓTICA. Técnica que aplica la informática al diseño y empleo de aparatos que, en sustitución de personas, realizan operaciones o trabajos, por lo general en instalaciones industriales. Capaces de realizar diferentes movimientos y acciones. Capaces de captar información del exterior, procesarlas y tomar determinadas decisiones mediante los procesos informáticos correspondientes.

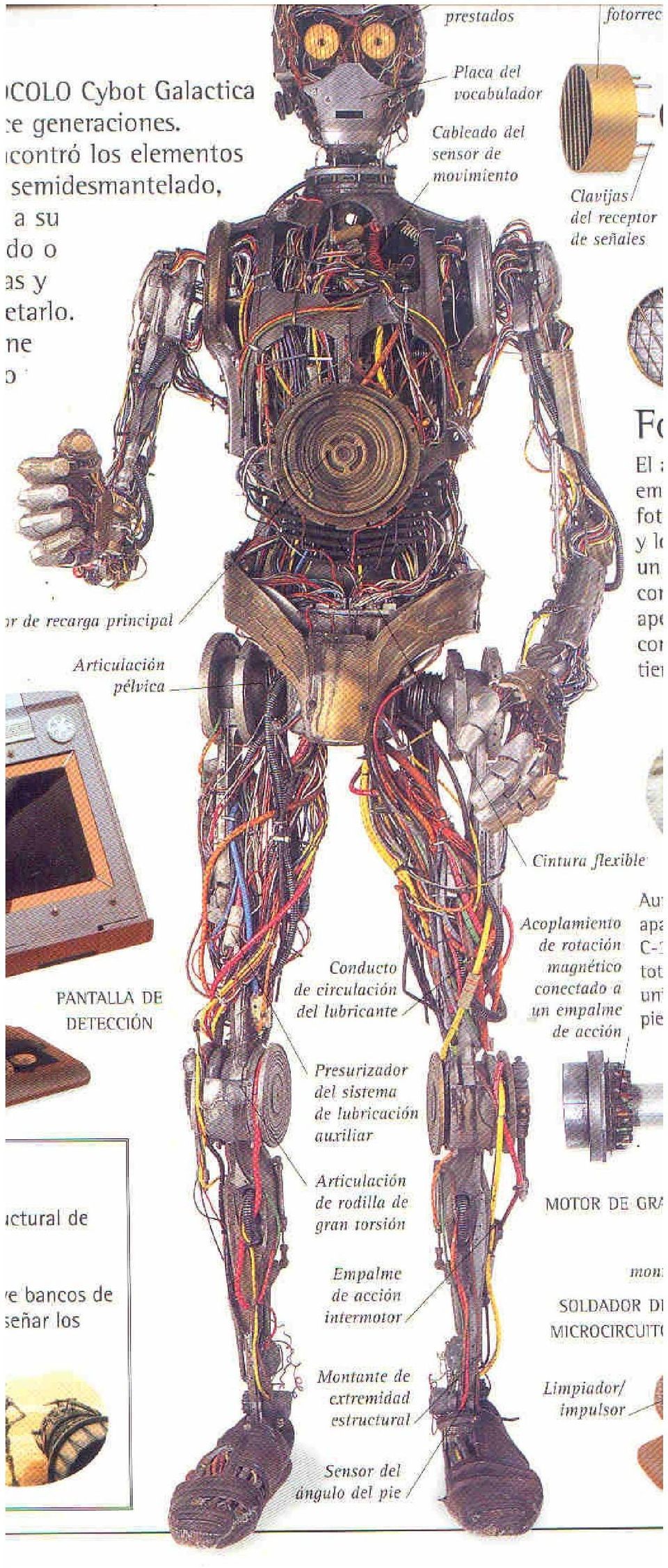
2 La evolución de la robótica tiene como principal objetivo conseguir robots cada vez mejor dotados de una buena movilidad, con sistemas de visión artificial mas avanzados, con capacidad para entender y reproducir el lenguaje humano, con capacidad para tomar decisiones inteligentes, etc. FUNCIONAMIENTO DE UN ROBOT. Un robot está constituido por: SENSORES: Constituyen el sistema de percepción del robot. Facilitan la información necesaria para que los robots interpreten el mundo real. Sensor de luminosidad. Detector de obstáculos por infrarrojos. Sensor de velocidad. Sensor de esfuerzos. Sensores táctiles. ACTUADORES: Son aquellos elementos encargados de proporcionar la fuerza necesaria para dotar de movimiento a las articulaciones y extremidades del robot, y así realizar las tareas programadas. Sistemas de impulsión del robot. Electroválvulas. Relés. CONTROLADORES. Es el elemento mas importante del sistema de control y realiza la parte inteligente, generando las señales que gobiernan los actuadotes en función de las señales de entrada suministradas por los sensores. Termostato. Circuitos integrados. Microprocesadores.

3 EL ROBOT INDUSTRIAL. Dispositivo de maniobra diseñado para ser utilizado en la industria, dotado de uno o varios brazos que pueden realizar diversas operaciones con varios grados de libertad, fácilmente programable y que está destinado a sustituir a actividad física del ser humano en las tareas repetitivas, monótonas, desagradables o peligrosas. Grados de libertad: Son los posibles movimientos básicos e independientes (giros y desplazamientos) que puede realizar un determinado robot. COMPONENTES DE UN ROBOT INDUSTRIAL. Brazo mecánico. Conjunto de elementos que generan el movimiento de la herramienta. Consta de Elementos motores o actuadores. Encargado de provocar el movimiento de las articulaciones. Se clasifican en: o Actuadores hidráulicos. o Actuadores neumáticos. o Actuadotes eléctricos. Herramienta. Es la encargada de realizar los distintos tipos de tareas. Se suele acoplar en la muñeca de brazo mecánico.
 que puede realizar un determinado robot. COMPONENTES DE UN ROBOT INDUSTRIAL. Brazo mecánico.")
4 Controlador. Es un ordenador que gobierna el funcionamiento de los órganos motrices y recoge información de los sensores. Sensores de información. Permiten que el robot se relacione con su entorno y tome decisiones para adaptar sus planes a las circunstancias exteriores.

5 CLASES DE ROBOTS. Los robots atendiendo a su aspecto físico y su funcionalidad, pueden clasificarse de la siguiente manera: Poliarticulados. Son esencialmente sedentarios (no se desplazan) y están diseñados para mover sus brazos y herramientas en un determinado espacio de trabajo. Móviles. Tienen gran capacidad de desplazamiento acoplazos en carros o plataformas. Se desplazan sobre ruedas y son accionados por medio de un mando a distancia o guiándose utilizando la información captada por sus sensores. Androides. Son robots que intentan reproducir la forma y los movimientos de los seres humanos. Actualmente son dispositivos poco evolucionados y con escasa utilidad práctica. Zoomórficos. Se caracterizan por imitar el sistema de locomoción de algunos seres vivos.

6
7

Unidad Didáctica Control y Robótica 4º ESO
 Unidad Didáctica Control y Robótica 4º ESO 1. Introducción. Tipos de trabajos según el grado de automatización. a) Trabajo artesanal b) Trabajo mecánico c) Trabajo automático Hombre con funciones de motor,
Unidad Didáctica Control y Robótica 4º ESO 1. Introducción. Tipos de trabajos según el grado de automatización. a) Trabajo artesanal b) Trabajo mecánico c) Trabajo automático Hombre con funciones de motor,
Máquinas CNC - Categorías Oficial Múltiple Superior y Oficial Múltiple. Conceptos técnicos involucrados. Acuerdo del 14/5/2013
 Máquinas CNC - Categorías Oficial Múltiple Superior y Oficial Múltiple Conceptos técnicos involucrados Acuerdo del 14/5/2013 Preguntas frecuentes Todos los que operan Máquinas CNC reciben la nueva categoría?
Máquinas CNC - Categorías Oficial Múltiple Superior y Oficial Múltiple Conceptos técnicos involucrados Acuerdo del 14/5/2013 Preguntas frecuentes Todos los que operan Máquinas CNC reciben la nueva categoría?
UNIVERSIDAD TÉCNICA DE AMBATO FACULTAD DE INGENIERÍA EN SISTEMAS, ELECTRÓNICA E INDUSTRIAL
 UNIVERSIDAD TÉCNICA DE AMBATO FACULTAD DE INGENIERÍA EN SISTEMAS, ELECTRÓNICA E INDUSTRIAL CARRERA DE INGENIERÍA INDUSTRIAL Y PROCESOS DE AUTOMATIZACIÓN ROBOTICA Tema: INTRODUCCION A LA ROBOTICA Estudiante:
UNIVERSIDAD TÉCNICA DE AMBATO FACULTAD DE INGENIERÍA EN SISTEMAS, ELECTRÓNICA E INDUSTRIAL CARRERA DE INGENIERÍA INDUSTRIAL Y PROCESOS DE AUTOMATIZACIÓN ROBOTICA Tema: INTRODUCCION A LA ROBOTICA Estudiante:
Qué son los robots. Expositor: Mauricio Galvez Legua mgalvez@uni.edu.pe
 Qué son los robots Expositor: Mauricio Galvez Legua mgalvez@uni.edu.pe 1 Introducción Algunas capacidades que exhiben las máquinas conducen a pensar que estamos frente a un robot: Pueden realizar tareas
Qué son los robots Expositor: Mauricio Galvez Legua mgalvez@uni.edu.pe 1 Introducción Algunas capacidades que exhiben las máquinas conducen a pensar que estamos frente a un robot: Pueden realizar tareas
Introducción a la robótica Industrial
 Introducción a la robótica Industrial 1.- Conceptualización Disciplina dedicada al estudio, diseño, realización y manejo de robots. Robota = trabajo realizado de manera forzada El término "Robot" aparece
Introducción a la robótica Industrial 1.- Conceptualización Disciplina dedicada al estudio, diseño, realización y manejo de robots. Robota = trabajo realizado de manera forzada El término "Robot" aparece
Control y Programación n de Robots
 Universidad de Valladolid E.T.S. de Ingenieros Industriales Control y Programación n de Robots Introducción n a la robótica (II) INDICE Definición n de robot industrial Elementos de un robot Programación
Universidad de Valladolid E.T.S. de Ingenieros Industriales Control y Programación n de Robots Introducción n a la robótica (II) INDICE Definición n de robot industrial Elementos de un robot Programación
Definición y características de robótica industrial
 Robotica industrial Secciones: 1. Anatomía del robot 2. La muñeca de un brazo robótico 3. Espacio de trabajo 4. Programación remota. 5. Sistemas de coordenadas Definición y características de robótica
Robotica industrial Secciones: 1. Anatomía del robot 2. La muñeca de un brazo robótico 3. Espacio de trabajo 4. Programación remota. 5. Sistemas de coordenadas Definición y características de robótica
Nombre de la asignatura: Robótica Industrial. Carrera: Ingeniería Electrónica
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Robótica Industrial Carrera: Ingeniería Electrónica Clave de la asignatura: Horas teoría - horas práctica créditos: 3 2 8 2.- HISTORIA DEL PROGRAMA Lugar
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Robótica Industrial Carrera: Ingeniería Electrónica Clave de la asignatura: Horas teoría - horas práctica créditos: 3 2 8 2.- HISTORIA DEL PROGRAMA Lugar
Esta materia está compuesta de 10 asignaturas que se imparten entre los cursos 2º, 3º y 4º.
 Denominación de la MATERIA: 12. INGENIERÍA AUTOMÁTICA Créditos ECTS, carácter (básica, obligatoria, optativa ): 30 ECTS obligatorios 30 ECTS optativos Duración y ubicación temporal dentro del plan de estudios:
Denominación de la MATERIA: 12. INGENIERÍA AUTOMÁTICA Créditos ECTS, carácter (básica, obligatoria, optativa ): 30 ECTS obligatorios 30 ECTS optativos Duración y ubicación temporal dentro del plan de estudios:
Instituto Tecnológico de Saltillo
 Instituto Tecnológico de Saltillo Cuestionario Robótica Unidad I Temas: antecedentes históricos, relación entre la automatización y la robótica y clasificación y aplicación de la robótica, Volumen de trabajo
Instituto Tecnológico de Saltillo Cuestionario Robótica Unidad I Temas: antecedentes históricos, relación entre la automatización y la robótica y clasificación y aplicación de la robótica, Volumen de trabajo
Elaborado por: Antonio José Randisi ÍNDICE. 1. Orígenes del Robot. 2. Estado actual de la Robótica. 3. Clasificación general de los Robot
 Elaborado por: Antonio José Randisi ÍNDICE 1. Orígenes del Robot 2. Estado actual de la Robótica 3. Clasificación general de los Robot 4. Objetivos de la Robótica industrial 5. Problemática del estudio
Elaborado por: Antonio José Randisi ÍNDICE 1. Orígenes del Robot 2. Estado actual de la Robótica 3. Clasificación general de los Robot 4. Objetivos de la Robótica industrial 5. Problemática del estudio
0. ÍNDICE... 1 1. OBJETO Y CAMPO DE APLICACIÓN... 2 2. TERMINOLOGÍA... 2 3. TIPOS DE SISTEMAS... 3 4. REQUISITOS GENERALES DE LA INSTALACIÓN...
 Página 1 de 5 0. ÍNDICE 0. ÍNDICE... 1 1. OBJETO Y CAMPO DE APLICACIÓN... 2 2. TERMINOLOGÍA... 2 3. TIPOS DE SISTEMAS... 3 4. REQUISITOS GENERALES DE LA INSTALACIÓN... 3 5. CONDICIONES PARTICULARES DE
Página 1 de 5 0. ÍNDICE 0. ÍNDICE... 1 1. OBJETO Y CAMPO DE APLICACIÓN... 2 2. TERMINOLOGÍA... 2 3. TIPOS DE SISTEMAS... 3 4. REQUISITOS GENERALES DE LA INSTALACIÓN... 3 5. CONDICIONES PARTICULARES DE
SUPLEMENTO EUROPASS AL TÍTULO
 SUPLEMENTO EUROPASS AL TÍTULO DENOMINACIÓN DEL TÍTULO Técnico Superior en Automatización y Robótica Industrial --------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
SUPLEMENTO EUROPASS AL TÍTULO DENOMINACIÓN DEL TÍTULO Técnico Superior en Automatización y Robótica Industrial --------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------------
CAPITULO III MARCO METODOLÓGICO. La presente investigación plantea como objetivo el diseño de un prototipo
 CAPITULO III MARCO METODOLÓGICO 1. Tipo de Investigación La presente investigación plantea como objetivo el diseño de un prototipo de robot industrial para la automatización del proceso de conformado de
CAPITULO III MARCO METODOLÓGICO 1. Tipo de Investigación La presente investigación plantea como objetivo el diseño de un prototipo de robot industrial para la automatización del proceso de conformado de
Catálogo Educación permanente. La oportunidad de un futuro mejor
 Educación permanente La oportunidad de un futuro mejor Centro de Excelencia en Mecatrónica El Área de Mecatrónica surge en el ITLA ante la demanda creciente de personal calificado en alta tecnología relacionada
Educación permanente La oportunidad de un futuro mejor Centro de Excelencia en Mecatrónica El Área de Mecatrónica surge en el ITLA ante la demanda creciente de personal calificado en alta tecnología relacionada
AUTOMATIZACIÓN:CONCEPTOS GENERALES GENERALES
 AUTOMATIZACIÓN:CONCEPTOS AUTOMATIZACIÓN:CONCEPTOS GENERALES GENERALES Introducción Sistemas de control Automatismos analógicos y digitales Componentes y modelos Automatismos cableados y programables El
AUTOMATIZACIÓN:CONCEPTOS AUTOMATIZACIÓN:CONCEPTOS GENERALES GENERALES Introducción Sistemas de control Automatismos analógicos y digitales Componentes y modelos Automatismos cableados y programables El
Instituto Tecnológico de Saltillo. Robótica. Ing. Ignacio Dávila Ríos. Unidad I Fundamentos
 Instituto Tecnológico de Saltillo Robótica Ing. Ignacio Dávila Ríos Unidad I Fundamentos Guía de estudio correspondiente la unidad 1 1. Mencione brevemente la historia de la Robotica. El alumno desarrollara
Instituto Tecnológico de Saltillo Robótica Ing. Ignacio Dávila Ríos Unidad I Fundamentos Guía de estudio correspondiente la unidad 1 1. Mencione brevemente la historia de la Robotica. El alumno desarrollara
Tema 1. Introducción a la automatización y el control.
 AUTOMATIZACIÓN Optativa Ingenierías Informáticas Tema 1. Introducción a la automatización y el control. F. Torres Departamento de Física, Ingeniería de Sistemas y Teoría de la Señal Grupo de Automática,
AUTOMATIZACIÓN Optativa Ingenierías Informáticas Tema 1. Introducción a la automatización y el control. F. Torres Departamento de Física, Ingeniería de Sistemas y Teoría de la Señal Grupo de Automática,
AUTOMATIZACION. Reconocer la arquitectura y características de un PLC Diferenciar los tipos de entradas y salidas
 AUTOMATIZACION GUIA DE TRABAJO 3 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Reconocer la arquitectura
AUTOMATIZACION GUIA DE TRABAJO 3 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Reconocer la arquitectura
Características Morfológicas. Principales características de los Robots.
 Características Morfológicas Principales características de los Robots. Se describen las características más relevantes propias de los robots y se proporcionan valores concretos de las mismas, para determinados
Características Morfológicas Principales características de los Robots. Se describen las características más relevantes propias de los robots y se proporcionan valores concretos de las mismas, para determinados
PRÁCTICAS VÍA INTERNET Célula de Clasificación
 PRÁCTICAS VÍA INTERNET Célula de Clasificación Descripción del Sistema Realizado: Laboratorio Remoto de Automática (LRA-ULE) Versión: Páginas: Grupo SUPPRESS (Supervisión, Control y Automatización) Universidad
PRÁCTICAS VÍA INTERNET Célula de Clasificación Descripción del Sistema Realizado: Laboratorio Remoto de Automática (LRA-ULE) Versión: Páginas: Grupo SUPPRESS (Supervisión, Control y Automatización) Universidad
Tendencias tecnológicas en la industria: Automatización Industrial. Christian Radillo Director Técnico México y centro América
 Tendencias tecnológicas en la industria: Automatización Industrial Christian Radillo Director Técnico México y centro América 15 de Octubre de 2015 El mundo esta cambiando 2 3 Vivimos en una era donde
Tendencias tecnológicas en la industria: Automatización Industrial Christian Radillo Director Técnico México y centro América 15 de Octubre de 2015 El mundo esta cambiando 2 3 Vivimos en una era donde
SIMULACIÓN EN TIEMPO REAL DE UNA ESTACION DE TRABAJO INDUSTRIAL ROBOTIZADA.
 SIMULACIÓN EN TIEMPO REAL DE UNA ESTACION DE TRABAJO INDUSTRIAL ROBOTIZADA. Mora Sánchez José Antonio, López Flores Miguel Eduardo, Bustillo Díaz Mario Benemérita Universidad Autónoma de Puebla 14 sur
SIMULACIÓN EN TIEMPO REAL DE UNA ESTACION DE TRABAJO INDUSTRIAL ROBOTIZADA. Mora Sánchez José Antonio, López Flores Miguel Eduardo, Bustillo Díaz Mario Benemérita Universidad Autónoma de Puebla 14 sur
Diseño o Estructurado GRAFCET
 Diseño o Estructurado GRAFCET 1 Introducción Modos de Marcha Marchas automáticas ÍNDICE Funcionamiento automático Funcionamiento semiautomático Marchas de intervención Marchas de ajuste del sistema Seguridad
Diseño o Estructurado GRAFCET 1 Introducción Modos de Marcha Marchas automáticas ÍNDICE Funcionamiento automático Funcionamiento semiautomático Marchas de intervención Marchas de ajuste del sistema Seguridad
Una computadora de cualquier forma que se vea tiene dos tipos de componentes: El Hardware y el Software.
 ARQUITECTURA DE LAS COMPUTADORAS QUE ES UNA COMPUTADORA (UN ORDENADOR)? Existen numerosas definiciones de una computadora, entre ellas las siguientes: 1) Una computadora es un dispositivo capaz de realizar
ARQUITECTURA DE LAS COMPUTADORAS QUE ES UNA COMPUTADORA (UN ORDENADOR)? Existen numerosas definiciones de una computadora, entre ellas las siguientes: 1) Una computadora es un dispositivo capaz de realizar
SISTEMAS DE CONTROL Y ROBÓTICA
 SISTEMAS DE CONTROL Y ROBÓTICA Programa «profundización de conocimientos» a través de proyectos de enriquecimiento curricular Elaborado por el Departamento de Tecnología del IES FEDERICO GARCÍA BERNALT
SISTEMAS DE CONTROL Y ROBÓTICA Programa «profundización de conocimientos» a través de proyectos de enriquecimiento curricular Elaborado por el Departamento de Tecnología del IES FEDERICO GARCÍA BERNALT
Experto en Robots Industriales
 Titulación certificada por EUROINNOVA BUSINESS SCHOOL Experto en Robots Industriales Experto en Robots Industriales Duración: 200 horas Precio: 189 * Modalidad: Online * Materiales didácticos, titulación
Titulación certificada por EUROINNOVA BUSINESS SCHOOL Experto en Robots Industriales Experto en Robots Industriales Duración: 200 horas Precio: 189 * Modalidad: Online * Materiales didácticos, titulación
Instalación de Sistemas de Automatización y Datos
 UNIVERSIDADE DE VIGO E. T. S. Ingenieros Industriales 5º Curso Orientación Instalaciones y Construcción Instalación de Sistemas de Automatización y Datos José Ignacio Armesto Quiroga http://www www.disa.uvigo.es/
UNIVERSIDADE DE VIGO E. T. S. Ingenieros Industriales 5º Curso Orientación Instalaciones y Construcción Instalación de Sistemas de Automatización y Datos José Ignacio Armesto Quiroga http://www www.disa.uvigo.es/
TECNOLOGÍA de AUTOMATIZACIÓN INDUSTRIAL ROBÓTICA. Autor: Ing. Dante de Marco
 TECNOLOGÍA de AUTOMATIZACIÓN INDUSTRIAL ROBÓTICA Introducción Autor: Ing. Dante de Marco El proceso de automatización de las actividades industriales permite obtener una mayor eficiencia en el área de
TECNOLOGÍA de AUTOMATIZACIÓN INDUSTRIAL ROBÓTICA Introducción Autor: Ing. Dante de Marco El proceso de automatización de las actividades industriales permite obtener una mayor eficiencia en el área de
3.9. Tutorial Excavadora
 3.9. Tutorial Excavadora 3.9.1. Introducción En este tutorial se va a simular el funcionamiento de una retroexcavadora. Como se sabe, el movimiento de una excavadora está gobernado por unos cilindros hidráulicos,
3.9. Tutorial Excavadora 3.9.1. Introducción En este tutorial se va a simular el funcionamiento de una retroexcavadora. Como se sabe, el movimiento de una excavadora está gobernado por unos cilindros hidráulicos,
PROPUESTAS DE PROYECTO ELÉCTRICO PARA EL PRIMER SEMESTRE 2011
 PROPUESTAS DE PROYECTO ELÉCTRICO PARA EL PRIMER SEMESTRE 2011 Profesor Mauricio Espinoza B. Objetivos Propuesta I Diseño de algoritmos de control para los simuladores de Staudinger GMBH de la Escuela de
PROPUESTAS DE PROYECTO ELÉCTRICO PARA EL PRIMER SEMESTRE 2011 Profesor Mauricio Espinoza B. Objetivos Propuesta I Diseño de algoritmos de control para los simuladores de Staudinger GMBH de la Escuela de
Accionamiento Directo (Direct Drive)
") Universidad de Valladolid E.T.S. de Ingenieros Industriales Control y Programación de Robots Morfología del robot: Actuadores y elementos terminales J.C. Fraile - ETSII - Universidad de Valladolid Accionamiento
Universidad de Valladolid E.T.S. de Ingenieros Industriales Control y Programación de Robots Morfología del robot: Actuadores y elementos terminales J.C. Fraile - ETSII - Universidad de Valladolid Accionamiento
CAPÍTULO I EL PROBLEMA PLANTEAMIENTO DEL PROBLEMA
 1 CAPÍTULO I EL PROBLEMA PLANTEAMIENTO DEL PROBLEMA UBICACIÓN DEL PROBLEMA EN UN CONTEXTO Autonomía de movimiento y percepción visual en el control de un robot humanoide, a través de la visión artificial.
1 CAPÍTULO I EL PROBLEMA PLANTEAMIENTO DEL PROBLEMA UBICACIÓN DEL PROBLEMA EN UN CONTEXTO Autonomía de movimiento y percepción visual en el control de un robot humanoide, a través de la visión artificial.
Adaptación de vehículos. para personas con movilidad reducida CAR
 Adaptación de vehículos para personas con movilidad reducida CAR Válida sin barreras: Soluciones en accesibilidad que mejoran la calidad de vida Nuestra misión es la de asesorar y ofrecer el servicio y
Adaptación de vehículos para personas con movilidad reducida CAR Válida sin barreras: Soluciones en accesibilidad que mejoran la calidad de vida Nuestra misión es la de asesorar y ofrecer el servicio y
PONTIFICIA UNIVERSIDAD CATÓLICA DE CHILE VICERRECTORÍA ACADÉMICA
 RESOLUCIÓN Nº111/2012 APRUEBA CREACIÓN DEL MAJOR EN SISTEMAS AUTÓNOMOS Y ROBÓTICOS (INTERDISCIPLINARIO) PARA ALUMNOS DE LA LICENCIATURA EN CIENCIAS DE LA INGENIERÍA 1º Apruébese la creación del Major en
RESOLUCIÓN Nº111/2012 APRUEBA CREACIÓN DEL MAJOR EN SISTEMAS AUTÓNOMOS Y ROBÓTICOS (INTERDISCIPLINARIO) PARA ALUMNOS DE LA LICENCIATURA EN CIENCIAS DE LA INGENIERÍA 1º Apruébese la creación del Major en
FUNCIONALIDADES DOMHO. Este documento recoge todas las funcionalidades posibles para un hogar inteligente.
 FUNCIONALIDADES DOMHO Este documento recoge todas las funcionalidades posibles para un hogar inteligente. GENERALIDADES La instalación se controlará tanto de forma manual o convencional como electrónica
FUNCIONALIDADES DOMHO Este documento recoge todas las funcionalidades posibles para un hogar inteligente. GENERALIDADES La instalación se controlará tanto de forma manual o convencional como electrónica
Instalación de Sistemas de Automatización y Datos
 UNIVERSIDADE DE VIGO E. T. S. Ingenieros Industriales 5º Curso Orientación Instalaciones y Construcción Instalación de Sistemas de Automatización y Datos José Ignacio Armesto Quiroga http://www www.disa.uvigo.es/
UNIVERSIDADE DE VIGO E. T. S. Ingenieros Industriales 5º Curso Orientación Instalaciones y Construcción Instalación de Sistemas de Automatización y Datos José Ignacio Armesto Quiroga http://www www.disa.uvigo.es/
DEFINICIONES EN CONTROL AUTOMÁTICO
 Universidad de Santiago de Chile Facultad de Ingeniería Departamento de Ingeniería Eléctrica DEFINICIONES EN CONTROL AUTOMÁTICO Oscar Páez Rivera Profesor DEFINICIONES BÁSICAS: Las definiciones que siguen
Universidad de Santiago de Chile Facultad de Ingeniería Departamento de Ingeniería Eléctrica DEFINICIONES EN CONTROL AUTOMÁTICO Oscar Páez Rivera Profesor DEFINICIONES BÁSICAS: Las definiciones que siguen
Las aplicaciones hidráulicas son clasificadas básicamente en : Aplicaciones estacionarias y Aplicaciones móviles.
 1. Hidráulica. En los modernos centros de producción y fabricación, se emplean los sistemas hidráulicos, estos producen fuerzas y movimientos mediante fluidos sometidos a presión. La gran cantidad de campos
1. Hidráulica. En los modernos centros de producción y fabricación, se emplean los sistemas hidráulicos, estos producen fuerzas y movimientos mediante fluidos sometidos a presión. La gran cantidad de campos
Los sistemas de movimiento y control basados en fluidos pueden ser neumáticos, hidráulicos, eléctricos y mecánicos.
 Neumática e Hidráulica 9 CAPÍTULO 1 GENERALIDADES Los sistemas de movimiento y control basados en fluidos pueden ser neumáticos, hidráulicos, eléctricos y mecánicos. 1.1 Neumática La palabra neumática
Neumática e Hidráulica 9 CAPÍTULO 1 GENERALIDADES Los sistemas de movimiento y control basados en fluidos pueden ser neumáticos, hidráulicos, eléctricos y mecánicos. 1.1 Neumática La palabra neumática
Int. Cl. 6 : A63H 17/12. k 71 Solicitante/s: José Manuel Olmo Avalos. k 72 Inventor/es: Olmo Avalos, José Manuel
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 031 281 21 k Número de solicitud: U 9501504 51 k Int. Cl. 6 : A63H 17/12 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 031 281 21 k Número de solicitud: U 9501504 51 k Int. Cl. 6 : A63H 17/12 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha
Domótica Inmótica Robótica
 APLICACIONES EN AUTOMATIZACIÓN Unidad 4 Domótica Inmótica Robótica En los tiempos modernos la automatización esta casi siempre ligada a informática, a la tecnología del accionamiento y al control, logrando
APLICACIONES EN AUTOMATIZACIÓN Unidad 4 Domótica Inmótica Robótica En los tiempos modernos la automatización esta casi siempre ligada a informática, a la tecnología del accionamiento y al control, logrando
Libro blanco Sistemas de manipulación cartesiana: comparación técnica con robots clásicos
 Libro blanco Sistemas de manipulación : comparación técnica con robots clásicos Por qué merece la pena utilizar sistemas de manipulación? La tendencia en las soluciones clásicas de montaje y manipulación
Libro blanco Sistemas de manipulación : comparación técnica con robots clásicos Por qué merece la pena utilizar sistemas de manipulación? La tendencia en las soluciones clásicas de montaje y manipulación
PROCEDIMIENTO DE EVALUACIÓN Y ACREDITACIÓN DE LAS COMPETENCIAS PROFESIONALES CUESTIONARIO DE AUTOEVALUACIÓN PARA LAS TRABAJADORAS Y TRABAJADORES
 MINISTERIO DE EDUCACIÓN SECRETARÍA DE ESTADO DE EDUCACIÓN Y FORMACIÓN PROFESIONAL DIRECCIÓN GENERAL DE FORMACIÓN PROFESIONAL INSTITUTO NACIONAL DE LAS CUALIFICACIONES PROCEDIMIENTO DE EVALUACIÓN Y ACREDITACIÓN
MINISTERIO DE EDUCACIÓN SECRETARÍA DE ESTADO DE EDUCACIÓN Y FORMACIÓN PROFESIONAL DIRECCIÓN GENERAL DE FORMACIÓN PROFESIONAL INSTITUTO NACIONAL DE LAS CUALIFICACIONES PROCEDIMIENTO DE EVALUACIÓN Y ACREDITACIÓN
Control Teaching de un Brazo Robot de Cinco Grados de Libertad
 Control Teaching de un Brazo Robot de Cinco Grados de Libertad Michel Ibáñez a610221@upc.edu.pe Christian R. Reátegui amoran@upc.edu.pe Asesor: Ing. Antonio Moran amoran@upc.edu.pe Universidad Peruana
Control Teaching de un Brazo Robot de Cinco Grados de Libertad Michel Ibáñez a610221@upc.edu.pe Christian R. Reátegui amoran@upc.edu.pe Asesor: Ing. Antonio Moran amoran@upc.edu.pe Universidad Peruana
ES 1 052 831 U. Número de publicación: 1 052 831 PATENTES Y MARCAS. Número de solicitud: U 200202242. Int. Cl. 7 : A63F 5/04
 k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 02 831 21 k Número de solicitud: U 200202242 1 k Int. Cl. 7 : A63F /04 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha
k 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 k Número de publicación: 1 02 831 21 k Número de solicitud: U 200202242 1 k Int. Cl. 7 : A63F /04 k 12 SOLICITUD DE MODELO DE UTILIDAD U k 22 Fecha
Universidad Politécnica de Guanajuato Semana de la Robótica Taller de introducción a la Robótica y Matlab (2 de Octubre de 2012)
") Universidad Politécnica de Guanajuato Semana de la Robótica Taller de introducción a la Robótica y Matlab (2 de Octubre de 2012) Objetivos del curso Revisar conceptos básicos de robótica y el uso inicial
Universidad Politécnica de Guanajuato Semana de la Robótica Taller de introducción a la Robótica y Matlab (2 de Octubre de 2012) Objetivos del curso Revisar conceptos básicos de robótica y el uso inicial
Hoy en día el uso de robots es común en distintas actividades, ya que estos
 CAPÍTULO 1 ANTECEDENTES 1.1 INTRODUCCIÓN Hoy en día el uso de robots es común en distintas actividades, ya que estos sistemas pueden someterse a trabajos pesados, repetitivos o peligrosos para el ser humano.
CAPÍTULO 1 ANTECEDENTES 1.1 INTRODUCCIÓN Hoy en día el uso de robots es común en distintas actividades, ya que estos sistemas pueden someterse a trabajos pesados, repetitivos o peligrosos para el ser humano.
SOLUCIONES E-BUSINESS
 SOLUCIONES E-BUSINESS Soluciones e-business La realización de operaciones de negocio electrónico se sirve de numerosas herramientas, utilizadas para sustituir a las aplicadas tradicionalmente por las empresas
SOLUCIONES E-BUSINESS Soluciones e-business La realización de operaciones de negocio electrónico se sirve de numerosas herramientas, utilizadas para sustituir a las aplicadas tradicionalmente por las empresas
Objetivo: observar el tipo de mantenimiento que se da a instalaciones de gas e instalaciones neumáticas.
 Objetivo: observar el tipo de mantenimiento que se da a instalaciones de gas e instalaciones neumáticas. Son equipos que proveen de energía eléctrica en forma autónoma ante interrupciones prolongadas y
Objetivo: observar el tipo de mantenimiento que se da a instalaciones de gas e instalaciones neumáticas. Son equipos que proveen de energía eléctrica en forma autónoma ante interrupciones prolongadas y
Mejores prácticas para el éxito de un sistema de información. Uno de los problemas de información dentro de las empresas es contar con datos
 ANEXO VI. Mejores prácticas para el éxito de un sistema de información Uno de los problemas de información dentro de las empresas es contar con datos importantes del negocio y que éstos estén aislados
ANEXO VI. Mejores prácticas para el éxito de un sistema de información Uno de los problemas de información dentro de las empresas es contar con datos importantes del negocio y que éstos estén aislados
Contenido. Presentación:
 Ingeniería de Procesos industriales Llave en Mano Automatización Industrial Automatismos Regulación y Control Componentes Electricos - Electrónicos Neumática - Oleohidráulica Compresores e Instalaciones
Ingeniería de Procesos industriales Llave en Mano Automatización Industrial Automatismos Regulación y Control Componentes Electricos - Electrónicos Neumática - Oleohidráulica Compresores e Instalaciones
Sistema software de acceso a dispositivos en tiempo real integrado en la plataforma MissionLab
 Sistema software de acceso a dispositivos en tiempo real integrado en la plataforma MissionLab Resumen de la Memoria Autor D. Rubén González del Pozo Tutores Dr. D. Raúl Alves Santos Dr. D. Vidal Moreno
Sistema software de acceso a dispositivos en tiempo real integrado en la plataforma MissionLab Resumen de la Memoria Autor D. Rubén González del Pozo Tutores Dr. D. Raúl Alves Santos Dr. D. Vidal Moreno
Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9
 Por Guillermo Martín Díaz Alumno de: 1º Ingeniería Informática Curso 2005/2006 ËQGLFH Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9 2 0RWRUHVGH&RUULHQWHFRQWLQXD Son los mas
Por Guillermo Martín Díaz Alumno de: 1º Ingeniería Informática Curso 2005/2006 ËQGLFH Motores de Corriente Continua...3 Motores Paso a Paso...7 Bibliografía...9 2 0RWRUHVGH&RUULHQWHFRQWLQXD Son los mas
TEMA 2: CIRQUE DU SOLEIL.
 TEMA 2: CIRQUE DU SOLEIL. LAS HABILIDADES MOTRICES, LAS HABILIDADES ESPECÍFICAS Y LAS CUALIDADES MOTRICES. 1) QUÉ SON LAS HABILIDADES MOTRICES? Es lo que te permite hacer con soltura los movimientos necesarios
TEMA 2: CIRQUE DU SOLEIL. LAS HABILIDADES MOTRICES, LAS HABILIDADES ESPECÍFICAS Y LAS CUALIDADES MOTRICES. 1) QUÉ SON LAS HABILIDADES MOTRICES? Es lo que te permite hacer con soltura los movimientos necesarios
Introducción QUÉ ES UN ROBOT?
 Introducción Bienvenidos a la primer clase de robótica, antes de poder comenzar a diseñar nuestro robot, debemos aprender algunas cosas. Puse varios videos e imágenes para que sea mas divertido! Ya se,
Introducción Bienvenidos a la primer clase de robótica, antes de poder comenzar a diseñar nuestro robot, debemos aprender algunas cosas. Puse varios videos e imágenes para que sea mas divertido! Ya se,
UF0035: Operaciones de caja en la venta
 UF0035: Operaciones de caja en la venta TEMA 1. Caja y Terminal Punto de Venta TEMA 2. Procedimientos de cobro y pago de las operaciones de venta OBJETIVOS - Aplicar los procedimientos de registro y cobro
UF0035: Operaciones de caja en la venta TEMA 1. Caja y Terminal Punto de Venta TEMA 2. Procedimientos de cobro y pago de las operaciones de venta OBJETIVOS - Aplicar los procedimientos de registro y cobro
Clave de la asignatura: Ingeniería Electromecánica
 1. Datos Generales de la asignatura Nombre de la asignatura: Clave de la asignatura: Sistemas integrados de manufactura AUC-1304 Créditos (Ht-Hp_ créditos): 2-2-4 Carrera: Ingeniería Electromecánica 2.
1. Datos Generales de la asignatura Nombre de la asignatura: Clave de la asignatura: Sistemas integrados de manufactura AUC-1304 Créditos (Ht-Hp_ créditos): 2-2-4 Carrera: Ingeniería Electromecánica 2.
I.1. PRESENTACIÓN GENERAL
 I.1. PRESENTACIÓN GENERAL El presente manual, tiene por objeto establecer los procedimientos a ser aplicados en cada una de las estaciones de inspección que conforman la línea de Revisiones Técnicas Tipo
I.1. PRESENTACIÓN GENERAL El presente manual, tiene por objeto establecer los procedimientos a ser aplicados en cada una de las estaciones de inspección que conforman la línea de Revisiones Técnicas Tipo
 Expresión Gráfica. 16 Otros dispositivos de almacenamiento de información son: los compact disc, con capacidad hasta 650 Megabytes, y las unidades zip que pueden almacenar 100 ó 250 Megabytes, según modelos.
Expresión Gráfica. 16 Otros dispositivos de almacenamiento de información son: los compact disc, con capacidad hasta 650 Megabytes, y las unidades zip que pueden almacenar 100 ó 250 Megabytes, según modelos.
Qué es PRESS-SYSTEM?
 Qué es PRESS-SYSTEM? Es un sistema novedoso desarrollado e implementado por Efinétika que consigue mejoras sobre el rendimiento de los sistemas de bombeo de fluidos, aportando grandes ahorros energéticos
Qué es PRESS-SYSTEM? Es un sistema novedoso desarrollado e implementado por Efinétika que consigue mejoras sobre el rendimiento de los sistemas de bombeo de fluidos, aportando grandes ahorros energéticos
DISEÑO Y ELABORACIÓN DE PRÁCTICAS DE LABORATORIO PARA ROBÓTICA INDUSTRIAL UTILIZANDO MANIPULADORES ROBÓTICOS KUKA
 DISEÑO Y ELABORACIÓN DE PRÁCTICAS DE LABORATORIO PARA ROBÓTICA INDUSTRIAL UTILIZANDO MANIPULADORES ROBÓTICOS KUKA Tania Vanessa Utreras Aguilar Departamento de Eléctrica y Electrónica, UNIVERSIDAD DE LAS
DISEÑO Y ELABORACIÓN DE PRÁCTICAS DE LABORATORIO PARA ROBÓTICA INDUSTRIAL UTILIZANDO MANIPULADORES ROBÓTICOS KUKA Tania Vanessa Utreras Aguilar Departamento de Eléctrica y Electrónica, UNIVERSIDAD DE LAS
elearning-200 El complemento teórico perfecto
 @ El complemento teórico perfecto El acceso al conocimiento sin barreras La forma de adquirir los fundamentos teóricos en tecnologías de la automatización, como soporte al desarrollo de competencias www.smctraining.com
@ El complemento teórico perfecto El acceso al conocimiento sin barreras La forma de adquirir los fundamentos teóricos en tecnologías de la automatización, como soporte al desarrollo de competencias www.smctraining.com
ESCUELA PROFESIONAL SAN FRANCISCO
 Módulo profesional: Vehículos híbridos y eléctricos. Código: CL14. Resultados de aprendizaje y criterios de evaluación. 1. Caracteriza el funcionamiento de los vehículos híbridos y eléctricos, interpretando
Módulo profesional: Vehículos híbridos y eléctricos. Código: CL14. Resultados de aprendizaje y criterios de evaluación. 1. Caracteriza el funcionamiento de los vehículos híbridos y eléctricos, interpretando
Interfaz gráfica para el control de un brazo robótico educativo de 5 grados de libertad.
 6to. Congreso Nacional de Mecatrónica, Noviembre 8-10, 007 Interfaz gráfica para el control de un brazo robótico educativo de 5 grados de libertad. Reyes Cocoletzi Lauro, Lechuga Sánchez Osvaldo, Sánchez
6to. Congreso Nacional de Mecatrónica, Noviembre 8-10, 007 Interfaz gráfica para el control de un brazo robótico educativo de 5 grados de libertad. Reyes Cocoletzi Lauro, Lechuga Sánchez Osvaldo, Sánchez
El enfoque del programa hace de este Máster de Mantenimiento de Instalaciones y Equipos Industriales una herramienta ideal para:
 El grado de automatización y sofisticación de los sistemas productivos hace necesario la implicación de muchas y variadas tecnologías, que deben coexistir de forma coordinada, para asegurar el volumen
El grado de automatización y sofisticación de los sistemas productivos hace necesario la implicación de muchas y variadas tecnologías, que deben coexistir de forma coordinada, para asegurar el volumen
SERVOMOTORES. Los servos se utilizan frecuentemente en sistemas de radiocontrol, mecatrónicos y robótica, pero su uso no está limitado a estos.
 SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
Tema 10. Interacción y supervisión.
 AUTOMATIZACIÓN Optativa Ingenierías Informáticas Tema 10. Interacción y supervisión. F. Torres y C. Jara Departamento de Física, Ingeniería de Sistemas y Teoría de la Señal Grupo de Automática, Robótica
AUTOMATIZACIÓN Optativa Ingenierías Informáticas Tema 10. Interacción y supervisión. F. Torres y C. Jara Departamento de Física, Ingeniería de Sistemas y Teoría de la Señal Grupo de Automática, Robótica
CONTROL LÒGICO PROGRAMABLE (PLC s) Instructor : Ing. JULIO CÉSAR BEDOYA PINO
 Instructor : Ing. JULIO CÉSAR BEDOYA PINO") CONTROL LÒGICO PROGRAMABLE (PLC s) Instructor : Ing. JULIO CÉSAR BEDOYA PINO CONTENIDO AUTOMATISMO OPCIONES TECNOLÓGICAS PLC VENTAJAS Y DESVENTAJAS ESTRUCTURA DE LOS PLC`s DE QUE SE COMPONE UN PLC? CONTENIDO
CONTROL LÒGICO PROGRAMABLE (PLC s) Instructor : Ing. JULIO CÉSAR BEDOYA PINO CONTENIDO AUTOMATISMO OPCIONES TECNOLÓGICAS PLC VENTAJAS Y DESVENTAJAS ESTRUCTURA DE LOS PLC`s DE QUE SE COMPONE UN PLC? CONTENIDO
Curso sobre Controladores Lógicos Programables (PLC).
.") CURSO Curso sobre Controladores Lógicos Programables (PLC). Por Ing. Norberto Molinari. Entrega Nº 1. Prologo Introducción. Los cambios que se están produciendo en el mundo del trabajo, a partir del desarrollo
CURSO Curso sobre Controladores Lógicos Programables (PLC). Por Ing. Norberto Molinari. Entrega Nº 1. Prologo Introducción. Los cambios que se están produciendo en el mundo del trabajo, a partir del desarrollo
UNIVERSIDAD CARLOS III DE MADRID Departamento de Ingeniería de Sistemas y Automática. Práctica - 4. Uso de los robots
 UNIVERSIDAD CARLOS III DE MADRID Departamento de Ingeniería de Sistemas y Automática Práctica - 4 Uso de los robots AI-II (56 10569) 2º Cuatrimestre 2006 Práctica 1. El robot ABB IRBX400. Funcionamiento
UNIVERSIDAD CARLOS III DE MADRID Departamento de Ingeniería de Sistemas y Automática Práctica - 4 Uso de los robots AI-II (56 10569) 2º Cuatrimestre 2006 Práctica 1. El robot ABB IRBX400. Funcionamiento
1.1.- CONCEPTOS Automatismo: Sistema que permite ejecutar una o varias acciones sin intervención manual.
 Automatización Industrial INTRODUCCIÓN A LA AUTOMATIZACIÓN 1 1.- INTRODUCCIÓN A LA AUTOMATIZACIÓN 1.1. CONCEPTOS. 1.2. TÉCNICAS DE CONTROL Y MANDO. 1.3. SISTEMAS PARA LA AUTOMATIZACIÓN. 1.4. SISTEMAS P.L.C.
Automatización Industrial INTRODUCCIÓN A LA AUTOMATIZACIÓN 1 1.- INTRODUCCIÓN A LA AUTOMATIZACIÓN 1.1. CONCEPTOS. 1.2. TÉCNICAS DE CONTROL Y MANDO. 1.3. SISTEMAS PARA LA AUTOMATIZACIÓN. 1.4. SISTEMAS P.L.C.
FICHA DE EMPRESA. Nombre del Representante en Innometalia Vicente Martínez Maciá. vimasol@vimasol.es 1. SECTOR Y SUBSECTOR AL QUE PERTENECE LA EMPRESA
 FICHA DE EMPRESA NOMBRE VIMASOL E HIJOS, S.L. Nombre del Representante en Innometalia Vicente Martínez Maciá Cargo Gerente E mail vimasol@vimasol.es 1. SECTOR Y SUBSECTOR AL QUE PERTENECE LA EMPRESA Descripción:
FICHA DE EMPRESA NOMBRE VIMASOL E HIJOS, S.L. Nombre del Representante en Innometalia Vicente Martínez Maciá Cargo Gerente E mail vimasol@vimasol.es 1. SECTOR Y SUBSECTOR AL QUE PERTENECE LA EMPRESA Descripción:
AUTOMATIZACIÓN INDUSTRIAL III
 ASIGNATURA DE GRADO: AUTOMATIZACIÓN INDUSTRIAL III Curso 2014/2015 (Código:68023024) 1.PRESENTACIÓN DE LA ASIGNATURA El objetivo principal de esta asignatura es aportar al estudiante el conocimiento y
ASIGNATURA DE GRADO: AUTOMATIZACIÓN INDUSTRIAL III Curso 2014/2015 (Código:68023024) 1.PRESENTACIÓN DE LA ASIGNATURA El objetivo principal de esta asignatura es aportar al estudiante el conocimiento y
Robótica Industrial. Curso. Morfología de un Robot Industrial. Parte I. Profesor Titular Universidad de Los Andes Mérida - Venezuela
 Curso Robótica Industrial Morfología de un Robot Industrial Parte I Profesor Titular Universidad de Los Andes Mérida - Venezuela Robótica Industrial Contenido Introducción Estructura mecánica Sistema de
Curso Robótica Industrial Morfología de un Robot Industrial Parte I Profesor Titular Universidad de Los Andes Mérida - Venezuela Robótica Industrial Contenido Introducción Estructura mecánica Sistema de
CAPÍTULO 1 Instrumentación Virtual
 CAPÍTULO 1 Instrumentación Virtual 1.1 Qué es Instrumentación Virtual? En las últimas décadas se han incrementado de manera considerable las aplicaciones que corren a través de redes debido al surgimiento
CAPÍTULO 1 Instrumentación Virtual 1.1 Qué es Instrumentación Virtual? En las últimas décadas se han incrementado de manera considerable las aplicaciones que corren a través de redes debido al surgimiento
2. APLICACIONES DE LA AUTOMATIZACION
 2. APLICACIONES DE LA AUTOMATIZACION El término automatización se refiere a una amplia variedad de sistemas y procesos que operan con mínima o sin intervención del ser humano. El alcance va más allá que
2. APLICACIONES DE LA AUTOMATIZACION El término automatización se refiere a una amplia variedad de sistemas y procesos que operan con mínima o sin intervención del ser humano. El alcance va más allá que
Competencia general Diseñar productos para su obtención por fabricación mecánica, con criterios de calidad, seguridad y respeto al medio ambiente.
 Página 1 de 14 CUALIFICACIÓN DISEÑO DE PRODUCTOS DE FABRICACIÓN MECÁNICA PROFESIONAL Familia Profesional Fabricación Mecánica Nivel 3 Código FME037_3 Versión 5 Situación RD 295/2004 Actualización Competencia
Página 1 de 14 CUALIFICACIÓN DISEÑO DE PRODUCTOS DE FABRICACIÓN MECÁNICA PROFESIONAL Familia Profesional Fabricación Mecánica Nivel 3 Código FME037_3 Versión 5 Situación RD 295/2004 Actualización Competencia
6. DESCRIPCIÓN DEL SOFTWARE
 Capítulo 2. Equipo 6. DESCRIPCIÓN DEL SOFTWARE 6.1 Introducción El equipo de medida descrito en el capítulo anterior lleva asociado un software que hace de sistema de control del proceso de medición. Este
Capítulo 2. Equipo 6. DESCRIPCIÓN DEL SOFTWARE 6.1 Introducción El equipo de medida descrito en el capítulo anterior lleva asociado un software que hace de sistema de control del proceso de medición. Este
AUTOMATIZACION. Reconocer la arquitectura y características de un PLC Diferenciar los tipos de entradas y salidas
 AUTOMATIZACION GUIA DE TRABAJO 2 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Reconocer la arquitectura
AUTOMATIZACION GUIA DE TRABAJO 2 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Reconocer la arquitectura
820221 - ARIEIA - Automatización y Robótica Industrial
 Unidad responsable: Unidad que imparte: Curso: Titulación: Créditos ECTS: 2015 820 - EUETIB - Escuela Universitaria de Ingeniería Técnica Industrial de Barcelona 707 - ESAII - Departamento de Ingeniería
Unidad responsable: Unidad que imparte: Curso: Titulación: Créditos ECTS: 2015 820 - EUETIB - Escuela Universitaria de Ingeniería Técnica Industrial de Barcelona 707 - ESAII - Departamento de Ingeniería
La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales.
 La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales. La instalación de aerogeneradores en entornos urbanos requiere la implementación de importantes medidas
La importancia de dimensionar correctamente los sistemas de frenado en aerogeneradores residenciales. La instalación de aerogeneradores en entornos urbanos requiere la implementación de importantes medidas
Automatización Industrial
 Automatización Industrial 1. Introducción El trabajo que a continuación vamos a presentar es acerca de un tema de mucha importancia para nosotros mismos y en especial para toda empresa industrial, el cual
Automatización Industrial 1. Introducción El trabajo que a continuación vamos a presentar es acerca de un tema de mucha importancia para nosotros mismos y en especial para toda empresa industrial, el cual
PROCEDIMIENTO DE EVALUACIÓN Y ACREDITACIÓN DE LAS COMPETENCIAS PROFESIONALES CUESTIONARIO DE AUTOEVALUACIÓN PARA LAS TRABAJADORAS Y TRABAJADORES
 MINISTERIO DE EDUCACIÓN SECRETARÍA DE ESTADO DE EDUCACIÓN Y FORMACIÓN PROFESIONAL DIRECCIÓN GENERAL DE FORMACIÓN PROFESIONAL INSTITUTO NACIONAL DE LAS CUALIFICACIONES PROCEDIMIENTO DE EVALUACIÓN Y ACREDITACIÓN
MINISTERIO DE EDUCACIÓN SECRETARÍA DE ESTADO DE EDUCACIÓN Y FORMACIÓN PROFESIONAL DIRECCIÓN GENERAL DE FORMACIÓN PROFESIONAL INSTITUTO NACIONAL DE LAS CUALIFICACIONES PROCEDIMIENTO DE EVALUACIÓN Y ACREDITACIÓN
CIM. Computer Integrated Manufacturing
 CIM Computer Integrated Manufacturing Automatización de las tecnologías de fresado y torneado El fresado y torneado, tecnologías de probada eficacia, Las tecnologías de fresado y torneado constituyen una
CIM Computer Integrated Manufacturing Automatización de las tecnologías de fresado y torneado El fresado y torneado, tecnologías de probada eficacia, Las tecnologías de fresado y torneado constituyen una
5. FACTORES DE ANALISIS AL REALIZAR UNA AUTOMATIZACION
 5. FACTORES DE ANALISIS AL REALIZAR UNA AUTOMATIZACION La Automatización es un proyecto tecnológico que ayuda a resolver una necesidad y se deben evaluar varias propuestas de solución, ya que permite tener
5. FACTORES DE ANALISIS AL REALIZAR UNA AUTOMATIZACION La Automatización es un proyecto tecnológico que ayuda a resolver una necesidad y se deben evaluar varias propuestas de solución, ya que permite tener
I. INTRODUCCION. PRACTICA N 03: Control Electroneumático de cilindros de simple y doble efecto usando el simulador FluidSIM
 PRACTICA N 0: Control Electroneumático de cilindros de simple y doble efecto usando el simulador FluidSIM I. INTRODUCCION Los electroneumática, como su nombre lo dice, es una técnica que abarca dos grandes
PRACTICA N 0: Control Electroneumático de cilindros de simple y doble efecto usando el simulador FluidSIM I. INTRODUCCION Los electroneumática, como su nombre lo dice, es una técnica que abarca dos grandes
TEMA 4. Unidades Funcionales del Computador
 TEMA 4 Unidades Funcionales del Computador Álvarez, S., Bravo, S., Departamento de Informática y automática Universidad de Salamanca Introducción El elemento físico, electrónico o hardware de un sistema
TEMA 4 Unidades Funcionales del Computador Álvarez, S., Bravo, S., Departamento de Informática y automática Universidad de Salamanca Introducción El elemento físico, electrónico o hardware de un sistema
CONVALIDACIÓN CICLOS FORMATIVOS DE GRADO SUPERIOR VINCULADOS A LA RAMA INDUSTRIAL FAMILIA PROFESIONAL EDIFICACIÓN Y OBRA CIVIL
 FAMILIA PROFESIONAL EDIFICACIÓN Y OBRA CIVIL DESARROLLO Y APLICACIÓN DE PROYECTOS DE CONSTRUCCIÓN (LOGSE) Módulos Profesionales del Ciclo Formativo pequeña empresa Administración de empresas OB Créditos
FAMILIA PROFESIONAL EDIFICACIÓN Y OBRA CIVIL DESARROLLO Y APLICACIÓN DE PROYECTOS DE CONSTRUCCIÓN (LOGSE) Módulos Profesionales del Ciclo Formativo pequeña empresa Administración de empresas OB Créditos
Intérprete entre el Operador y el Ordenador.
 Introducción a Windows Generalidades Una computadora es un colaborador rápido y eficaz en la tarea administrativa de la información. La computadora en realidad es capaz de hacer muy pocas cosas, como ser:
Introducción a Windows Generalidades Una computadora es un colaborador rápido y eficaz en la tarea administrativa de la información. La computadora en realidad es capaz de hacer muy pocas cosas, como ser:
Int. Cl.: 74 Agente: Ungría López, Javier
 19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 361 129 1 Int. Cl.: B2J 1/00 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número de solicitud europea: 078289. 96 Fecha de
19 OFICINA ESPAÑOLA DE PATENTES Y MARCAS ESPAÑA 11 Número de publicación: 2 361 129 1 Int. Cl.: B2J 1/00 (06.01) 12 TRADUCCIÓN DE PATENTE EUROPEA T3 96 Número de solicitud europea: 078289. 96 Fecha de
Una vez descrita la constitución general de un robot, podemos empezar con la
 CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
TEMA 2. ESQUEMAS ELÉCTRICOS (II)
") TEMA 2. Esquemas eléctricos (II) 1 TEMA 2. ESQUEMAS ELÉCTRICOS (II) 1. SÍMBOLOS Y ESQUEMAS ELÉCTRICOS EN LAS NORMAS UNE EN 60.617...2 1.1. DISPOSITIVOS DE CONMUTACIÓN DE POTENCIA...2 1.1.1. Contactor...2
TEMA 2. Esquemas eléctricos (II) 1 TEMA 2. ESQUEMAS ELÉCTRICOS (II) 1. SÍMBOLOS Y ESQUEMAS ELÉCTRICOS EN LAS NORMAS UNE EN 60.617...2 1.1. DISPOSITIVOS DE CONMUTACIÓN DE POTENCIA...2 1.1.1. Contactor...2
LA COLABORACIÓN PÚBLICO-PRIVADA PARA MEJORAR EL SERVICIO DE ATENCIÓN AL CIUDADANO
 LA COLABORACIÓN PÚBLICO-PRIVADA PARA MEJORAR EL SERVICIO DE ATENCIÓN AL CIUDADANO Jefe del Departamento de Gestión Administrativa Ayuntamiento de Blanes (Girona) Palabras clave Comunicación, ciudadano,
LA COLABORACIÓN PÚBLICO-PRIVADA PARA MEJORAR EL SERVICIO DE ATENCIÓN AL CIUDADANO Jefe del Departamento de Gestión Administrativa Ayuntamiento de Blanes (Girona) Palabras clave Comunicación, ciudadano,
AUTOMATIZACION. Identificar los grados de automatización y los tipos de accionamientos Definición de un controlador lógico programable
 AUTOMATIZACION GUIA DE TRABAJO 1 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Identificar los grados
AUTOMATIZACION GUIA DE TRABAJO 1 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Identificar los grados
1º CURSO 1º SEMESTRE 1º CURSO 2º SEMESTRE 2º CURSO 1º SEMESTRE
 Tabla 10.2. Tabla de equivalencia entre asignaturas de Especialidad en Electrónica al. 1º CURSO 1º SEMESTRE FB Matemáticas I 6 Matemáticas I 6 5434 FB Física I 6 Física Mecánica 6 5102 Fundamentos Químicos
Tabla 10.2. Tabla de equivalencia entre asignaturas de Especialidad en Electrónica al. 1º CURSO 1º SEMESTRE FB Matemáticas I 6 Matemáticas I 6 5434 FB Física I 6 Física Mecánica 6 5102 Fundamentos Químicos
DESPACHO: Edificio CPS (Área de Diseño y Fabricación)
") FABRICACIÓN INTEGRADA POR ORD. Y AUTOMATIZACIÓN DE LA PRODUCCIÓN CURSO: 3º MECANICOS HORARIO: LUNES 12:00-14:00 PROFESORES: Carlos Cajal ccajal@unizar.es Francisco Brosed fjbrosed@unizar.es Jesús Casanova
FABRICACIÓN INTEGRADA POR ORD. Y AUTOMATIZACIÓN DE LA PRODUCCIÓN CURSO: 3º MECANICOS HORARIO: LUNES 12:00-14:00 PROFESORES: Carlos Cajal ccajal@unizar.es Francisco Brosed fjbrosed@unizar.es Jesús Casanova
Sectores Productivos Se ubica en todas aquellas actividades económico-productivas en las que intervienen procesos industriales automatizados.
 Página 1 de 16 CUALIFICACIÓN PROFESIONAL MONTAJE Y MANTENIMIENTO DE SISTEMAS DE AUTOMATIZACIÓN INDUSTRIAL Familia Profesional Electricidad y Electrónica Nivel 2 Código ELE599_2 Versión 5 Situación RD 560/2011
Página 1 de 16 CUALIFICACIÓN PROFESIONAL MONTAJE Y MANTENIMIENTO DE SISTEMAS DE AUTOMATIZACIÓN INDUSTRIAL Familia Profesional Electricidad y Electrónica Nivel 2 Código ELE599_2 Versión 5 Situación RD 560/2011
Partes, módulos y aplicaciones de un Controlador de Procesos
 Partes, módulos y aplicaciones de un Controlador de Procesos Conceptos PLC Un controlador lógico programable es un sistema que originalmente fue desarrollado para la industria de manufactura, en particular
Partes, módulos y aplicaciones de un Controlador de Procesos Conceptos PLC Un controlador lógico programable es un sistema que originalmente fue desarrollado para la industria de manufactura, en particular
6º Tema.- Accionamientos y actuadores eléctricos.
 Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 6º Tema.- Accionamientos y actuadores eléctricos. Huelva, Noviembre 2008 Profesor: Rafael Sánchez Sánchez Página 1 de
Asignatura: Ingeniería de Máquinas [570004027] 5º curso de Ingenieros Industriales 6º Tema.- Accionamientos y actuadores eléctricos. Huelva, Noviembre 2008 Profesor: Rafael Sánchez Sánchez Página 1 de