Valores y vectores propios de una matriz. Juan-Miguel Gracia
|
|
|
- Gloria Martin Calderón
- hace 8 años
- Vistas:
Transcripción
1 Juan-Miguel Gracia

2 Índice 1 Valores propios 2 Polinomio característico 3 Independencia lineal 4 Valores propios simples 5 Diagonalización de matrices 2 / 28

3 B. Valores y vectores propios Definiciones.- Dada una matriz cuadrada A de orden 3 se dice que el número λ 0 es un valor propio de A si existe un vector columna tridimensional c no nulo t.q. Ac = λ 0 c. El vector c se llama vector propio de A asociado al valor propio λ 0. Otras terminologías equivalentes λ 0 valor propio autovalor valor característico eigenvalor c vector propio autovector vector característico eigenvector 4 / 28

4 B. Método para hallar valores y vectores propios, 1 Por definición, un vector propio c debe ser un vector columna distinto de 0 0 = 0. 0 Buscamos λ 0 y c tales que λ 0 c = Ac Esta ecuación es equivalente a λ 0 I 3 c = Ac, siendo I 3 la matriz unidad de orden 3: I 3 = El vector c = 0 satisface λ 0 = A0 cualquiera que sea el número λ. Esta situación no interesa, pues cualquier número sería valor propio de A. 6 / 28

5 B. Método para hallar valores y vectores propios, 4 La ecuación es equivalente a λ 0 I 3 c = Ac (λ 0 I 3 A) c = 0 Si c ha de ser distinto de cero, entonces necesariamente el determinante λ 0 I 3 A tiene que ser igual a 0. Una posible manera de hallar el λ 0 que buscamos es construir el polinomio en λ p(λ) := λ I 3 A (1) El polinomio p(λ) en la variable λ es de grado 3 y se llama el polinomio característico de A. 7 / 28
 := λ I 3 A (1) El")
6 B. Método para hallar valores y vectores propios, 5 Debemos resolver la ecuación en la incógnita λ p(λ) := λ I 3 A = 0. (2) A continuación si λ 0 es una raíz de esta ecuación, se resuelve el sistema homogéneo indeterminado c 1 0 (λ 0 I 3 A) c 2 = 0 (3) c 3 0 c 1 en las incógnitas c 1, c 2, c 3. Una solución c = c 2 de (3) con no todas las componentes c 1, c 2, c 3 nulas, proporciona uno de los vectores buscados. c 3 8 / 28
 c 2 = 0 (3) c 3 0 c 1 en las incógnitas c 1, c 2, c 3.")
7 B. Ejemplo de cálculo de un valor y un vector propio, 1 Sea la matriz A = (4) Vamos a hallar un valor propio y un vector propio asociado. Es preciso resolver la ecuación en λ λ λ I A = 3 λ λ + 1 = λ3 2λ 2 5λ + 6 = 0 (5) 9 / 28

8 B. Ejemplo de cálculo de un valor y un vector propio, 2 Por la regla de Ruffini encontramos que λ 0 = 1 es una raíz de (5): = = 0 c 1 Para encontrar un vector propio c = c 2 asociado a este λ 0 = 1, resolvemos el sistema homogéneo de ecuaciones lineales c 1 0 (λ 0 I A) c = c 2 = c 3 0 c 3 10 / 28
 c = 3 1 1 c 2 = 0 2 1 2 c 3 0 c")
9 B. Ejemplo de cálculo de un valor y un vector propio, 3 Escribimos este sistema en la forma c 2 4c 3 = 0 3c 1 c 2 + c 3 = 0 2c 1 c 2 + 2c 3 = 0 Como , tachamos la última ecuación: { c 2 4c 3 = 0 3c 1 c 2 + c 3 = / 28

10 B. Ejemplo de cálculo de un valor y un vector propio, 4 Este sistema es equivalente al anterior. Pasamos c 3 al segundo miembro { c 2 = 4c 3 3c 1 c 2 = c 3 Damos a c 3 un valor arbitrario; por ejemplo, c 3 = 1 : { c 2 = 4 = c 3c 1 c 2 = 1 2 = 4 ; 3c 1 = c 2 1 = 4 1 = 3 = c 1 = 1 Así pues, un vector propio asociado a λ 0 = 1 es 1 c = / 28

11 Definición 1 B. Independencia lineal, 1 Sean u 1, u 2, u 3 vectores columna 3 1. Se dice que el sistema de vectores {u 1, u 2, u 3} es linealmente independiente (l.i.) si para escalares α 1, α 2, α 3 la relación α 1u 1 + α 2u 2 + α 3u 3 = 0 sólo es posible cuando α 1 = 0, α 2 = 0, α 3 = 0. El sistema {u 1, u 2, u 3} se dice linealmente dependiente (l.d.) si existen escalares β 1, β 2, β 3 no todos nulos tales que β 1u 1 + β 2u 2 + β 3u 3 = 0 Abuso de lenguaje Es frecuente decir que los vectores u 1, u 2, u 3 son linealmente independientes (en plural) cuando el sistema {u 1, u 2, u 3} es linealmente independiente. El concepto de independencia lineal siempre se refiere a un sistema o conjunto de vectores. No existe el concepto de vector linealmente independiente. Así pues, un conjunto de vectores linealmente independientes no es la reunión de vectores, cada uno de los cuales sea linealmente independiente. 14 / 28
 si existen escalares β 1, β 2, β 3 no todos nulos tales que β 1u 1 + β 2u 2 + β 3u 3 = 0 Abuso de lenguaje Es frecuente decir que los vectores u 1, u 2, u 3 son linealmente")
12 B. Independencia lineal, 2 A veces es práctico utilizar esta definición equivalente de independencia lineal: El sistema de vectores {u 1, u 2, u 3} es l.i. si para escalares α 1, α 2, α 3 la relación α 1u 1 + α 2u 2 + α 3u 3 = 0, = α 1 = 0, α 2 = 0, α 3 = 0. Dados unos vectores w 1, w 2, w 3, se llama combinación lineal de estos vectores a todo vector w de la forma NB Proposición 2 w := α 1w 1 + α 2w 2 + α 3w 3. Un sistema de vectores {u 1, u 2, u 3} es l.d. si y sólo si alguno de estos vectores es combinación lineal de los otros dos. Demostración. Por hipótesis existen escalares β 1, β 2, β 3 no todos cero t.q. Sea, por ejemplo, β 2 0. De (6) se sigue que β 1u 1 + β 2u 2 + β 3u 3 = 0 (6) β 1u 1 + β 3u 3 = β 2u 2; = u 2 = β 1 β 2 u 1 β 3 β 2 u 3; = u 2 es combinación lineal de {u 1, u 3}. 15 / 28

13 NB. Independencia lineal, 3 Recíprocamente, si un vector, digamos u 1, es combinación lineal de {u 2, u 3}, entonces existen escalares α 2, α 3 t.q. u 1 = α 2u 2 + α 3u 3. Por tanto, u 1 + α 2u 2 + α 3u 3 = 0. (7) Esto significa que el sistema {u 1, u 2, u 3} es l.d. pues el coeficiente de u 1 en (7) es 1 (que es 0). Proposición 3 Si w 1, w 2, w 3 son l.i. y α 1w 1 + α 2w 2 + α 3w 3 = β 1w 1 + β 2w 2 + β 3w 3 (8) con α i, β 1, i = 1, 2, 3, escalares, entonces α 1 = β 1, α 2 = β 2, α 3 = β 3. Comentario. La expresión de un vector como combinación lineal de un sistema de vectores l.i. es única. 16 / 28

14 Demostración. Por (8), NB. Independencia lineal, 4 (α 1 β 1)w 1 + (α 2 β 2)w 2 + (α 3 β 3)w 3 = 0. Como {w 1, w 2, w 3} es l.i., esta relación implica que α 1 β 1 = 0, α 2 β 2 = 0, α 2 β 2 = 0. = α 1 = β 1, α 2 = β 2, α 3 = β 3. Proposición 4 Si uno de los vectores {u 1, u 2, u 3} es el vector 0, entonces este sistema es l.d. Demostración. Como λ0 = 0 para todo escalar λ, y 0u = 0 para todo vector u, si fuese u 1 = 0 se tendría que tomando un λ 1 0 (cualquiera): α 1u 1 + 0u 2 + 0u 3 = α = 0 = {u 1, u 2, u 3} es l.i. Si el vector cero fuese u 2 o u 3, la demostración sería análoga. 17 / 28

15 NB. Notaciones de lógica. Si A denota una aserción, por A denotamos su negación. Por ejemplo si A es la aserción Todos los hombres son malayos, su negación A es No todos los hombres son malayos ; es decir A equivale a decir Hay al menos un hombre que no es malayo. Teorema directo: A = B Teorema recíproco: B = A Teorema contrarrecíproco B = A Así pues, (A = B) ( B = A) 18 / 28

16 NB. Independencia lineal, 5 La proposición contrarrecíproca de la Proposición 4 dice que la aserción siguiente es verdadera. Proposición 5 Si un sistema de vectores {u 1, u 2, u 3} es l.i., entonces ninguno de estos vectores puede ser el vector / 28

17 B. Valores propios simples, 1 Supongamos que la matriz A de orden 3 tiene sus valores propios simples: λ 1, λ 2, λ 3. Esto quiere decir, que λ 1, λ 2, λ 3 son tres números distintos dos a dos. Es conocido que un polinomio de grado 3 puede tener: (1) o tres raíces simples; (2) o una raíz doble y una simple; (3) o una raíz triple. Teorema 6 Sea A una matriz cuadrada 3 3 y supongamos que todos sus valores propios λ 1, λ 2, λ 3 son simples. Sean v 1, v 2, v 3 vectores propios de A asociados a λ 1, λ 2, λ 3, respectivamente. Entonces {v 1, v 2, v 3} es un sistema linealmente independiente. NB.Demostración. Los vectores v 1, v 2 son l.i., pues si existiese un escalar α tal que v 2 = αv 1, (9) se tendría que Av 2 = αav 1; de donde λ 2v 2 = αλ 1v 1. Multiplicando (9) por λ 2, λ 2v 2 = αλ 2v 1. Lo que implica αλ 1v 1 = αλ 2v 1. = (αλ 1 αλ 2)v 1 = 0, = α(λ 1 λ 2) = 0, y como λ 1 λ 2, se sigue que α = 0. Pero, por (9), esto implicaría que v 2 = 0; imposible (v 2 vector propio); = v 1, v 2 son l.i. 21 / 28
 se tendría que Av 2 = αav 1; de donde λ 2v 2 = αλ 1v 1.")
18 NB. Valores propios simples, 2 Sigamos la demostración por reducción al absurdo. Supongamos que el sistema {v 1, v 2, v 3} fuera l.d. Entonces por la Proposición 2 alguno de estos vectores sería combinación lineal de los otros dos. Supongamos que v 3 es combinación lineal de v 1, v 2: v 3 = α 1v 1 + α 2v 2. (10) Premultiplicando (10) por A: Multiplicando (10) por λ 3, Av 3 = α 1Av 1 + α 2Av 2. Por tanto, λ 3v 3 = α 1λ 1v 1 + α 2λ 2v 2. (11) λ 3v 3 = α 1λ 3v 1 + α 2λ 3v 2. (12) Igualando los segundos miembros de (11) y (12) resulta Por la Proposición 3, se sigue α 1λ 1v 1 + α 2λ 2v 2 = α 1λ 3v 1 + α 2λ 3v 2. α 1λ 1 = α 1λ 3, α 2λ 2 = α 2λ 3. = α 1(λ 1 λ 3) = 0, α 2(λ 2 λ 3) = 0 Como λ 1 λ 3 y λ 2 λ 3; = α 1 = 0, α 2 = 0. Por (10), v 3 = 0; imposible (v 3 vector propio). = v 3 no es combinación lineal de v 1, v 2. = v 1, v 2, v 3 son l.i. 22 / 28
 Igualando los segundos miembros de (11) y (12) resulta Por la Proposición 3, se sigue α 1λ 1v 1 + α 2λ 2v 2 = α 1λ 3v 1 + α 2λ 3v 2. α 1λ 1 = α 1λ 3, α 2λ 2 = α 2λ 3.")
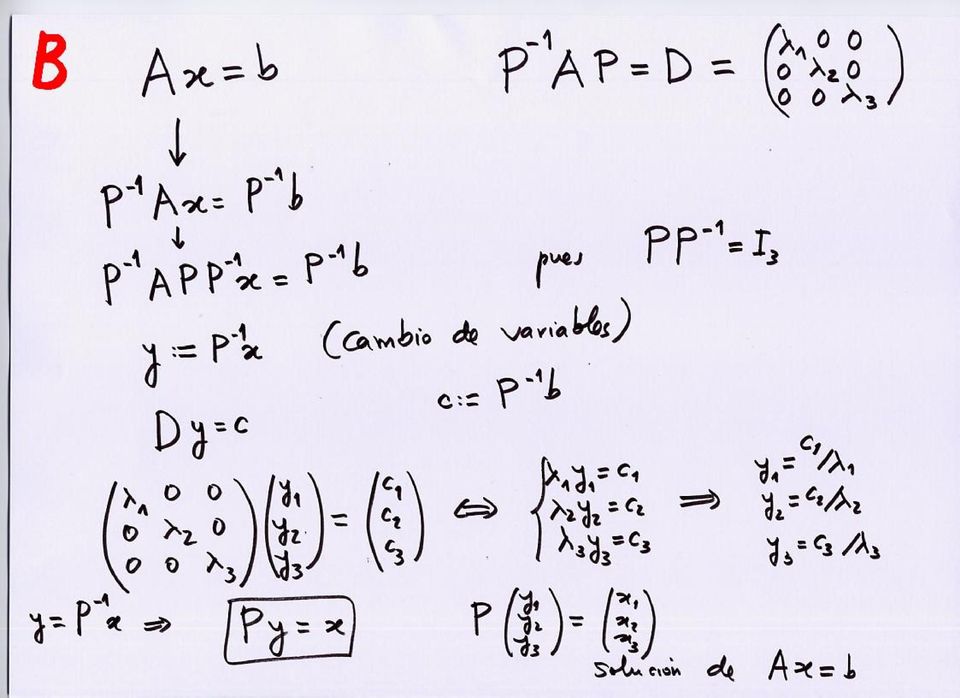
19 B. Diagonalización de matrices Para qué sirven los valores propios? Para resolver sistemas de ecuaciones lineales, separando (desacoplando) sus variables. Ejemplos: (1) x (t) = Ax(t) + b(t); (2) Ax = b. Sea P := [v 1, v 2, v 3], λ AP = [Av 1, Av 2, Av 3] = [λ 1v 1, λ 2v 2, λ 3v 3] = [v 1, v 2, v 3] 0 λ 2 0 = PD; 0 0 λ 3 llamando Por ello, λ D := 0 λ λ 3 P 1 AP = D. 24 / 28

20
21
22
23
24 B. Ejemplo de cálculo de valores propios, sigue Sea A la matriz del ejemplo ejemplo. Ya hemos calculado uno de valores propios de A : λ 1 = 1(=: λ 0). Hallemos los dos que faltan λ 2, λ 3. Utilizando la regla de Ruffini: λ I A = λ λ λ + 1 = λ3 2λ 2 5λ + 6 = = λ 2 = 3 es una raíz. 25 / 28
25 B. Ejemplo de cálculo de valores propios, sigue, = λ 3 = 2 es una raíz. 26 / 28
26 B. Ejemplo de cálculo de valores propios, sigue, = λ 1 = 1 es una raíz. primer valor propio 27 / 28
27 B. Ejemplo de cálculo de valores propios, sigue, 4 De manera análoga al cálculo de un vector propio v 1 = (c), asociado a λ 1 = 1(= λ 0), se pueden calcular vectores propios v 2, v 3 asociados a λ 2 = 3, λ 3 = 2, respectivamente. Se deja como ejercicio el cálculo de estos dos vectores propios v 1 = 4, v 2 = 2, v 3 = Diagonalización de la matriz A. Sea P := [v 1, v 2, v 3], P = 4 2 1, D = Ejercicio 7 Comprobar con cálculos que AP = PD. Lo que implicará P 1 AP = D. 28 / 28
Subespacios vectoriales en R n
 Subespacios vectoriales en R n Víctor Domínguez Octubre 2011 1. Introducción Con estas notas resumimos los conceptos fundamentales del tema 3 que, en pocas palabras, se puede resumir en técnicas de manejo
Subespacios vectoriales en R n Víctor Domínguez Octubre 2011 1. Introducción Con estas notas resumimos los conceptos fundamentales del tema 3 que, en pocas palabras, se puede resumir en técnicas de manejo
FORMA CANONICA DE JORDAN Y ECUACIONES DIFERENCIALES LINEALES A COEFICIENTES CONSTANTES
 FORMA CANONICA DE JORDAN Y ECUACIONES DIFERENCIALES LINEALES A COEFICIENTES CONSTANTES Eleonora Catsigeras 6 de mayo de 997 Notas para el curso de Análisis Matemático II Resumen Se enuncia sin demostración
FORMA CANONICA DE JORDAN Y ECUACIONES DIFERENCIALES LINEALES A COEFICIENTES CONSTANTES Eleonora Catsigeras 6 de mayo de 997 Notas para el curso de Análisis Matemático II Resumen Se enuncia sin demostración
Tema 2. Espacios Vectoriales. 2.1. Introducción
 Tema 2 Espacios Vectoriales 2.1. Introducción Estamos habituados en diferentes cursos a trabajar con el concepto de vector. Concretamente sabemos que un vector es un segmento orientado caracterizado por
Tema 2 Espacios Vectoriales 2.1. Introducción Estamos habituados en diferentes cursos a trabajar con el concepto de vector. Concretamente sabemos que un vector es un segmento orientado caracterizado por
Tema 3. Espacios vectoriales
 Tema 3. Espacios vectoriales Estructura del tema. Definición y propiedades. Ejemplos. Dependencia e independencia lineal. Conceptos de base y dimensión. Coordenadas Subespacios vectoriales. 0.1. Definición
Tema 3. Espacios vectoriales Estructura del tema. Definición y propiedades. Ejemplos. Dependencia e independencia lineal. Conceptos de base y dimensión. Coordenadas Subespacios vectoriales. 0.1. Definición
Tema 1: Fundamentos de lógica, teoría de conjuntos y estructuras algebraicas: Apéndice
 Tema 1: Fundamentos de lógica, teoría de conjuntos y estructuras algebraicas: Apéndice 1 Polinomios Dedicaremos este apartado al repaso de los polinomios. Se define R[x] ={a 0 + a 1 x + a 2 x 2 +... +
Tema 1: Fundamentos de lógica, teoría de conjuntos y estructuras algebraicas: Apéndice 1 Polinomios Dedicaremos este apartado al repaso de los polinomios. Se define R[x] ={a 0 + a 1 x + a 2 x 2 +... +
y λu = Idea. Podemos sumar vectores y multiplicar por un escalar. El resultado vuelve a ser un vector Definición de espacio vectorial.
 Espacios vectoriales Espacios y subespacios R n es el conjunto de todos los vectores columna con n componentes. Además R n es un espacio vectorial. Ejemplo Dados dos vectores de R por ejemplo u = 5 v =
Espacios vectoriales Espacios y subespacios R n es el conjunto de todos los vectores columna con n componentes. Además R n es un espacio vectorial. Ejemplo Dados dos vectores de R por ejemplo u = 5 v =
Capitán de fragata ingeniero AGUSTÍN E. GONZÁLEZ MORALES. ÁLGEBRA PARA INGENIEROS (Solucionario)
") Capitán de fragata ingeniero AGUSTÍN E. GONZÁLEZ MORALES ÁLGEBRA PARA INGENIEROS (Solucionario) 2 Í N D I C E CAPÍTULO : MATRICES, DETERMINANTES Y SISTEMAS DE ECUACIONES LINEALES CAPÍTULO 2: ESPACIOS VECTORIALES
Capitán de fragata ingeniero AGUSTÍN E. GONZÁLEZ MORALES ÁLGEBRA PARA INGENIEROS (Solucionario) 2 Í N D I C E CAPÍTULO : MATRICES, DETERMINANTES Y SISTEMAS DE ECUACIONES LINEALES CAPÍTULO 2: ESPACIOS VECTORIALES
Matrices equivalentes. El método de Gauss
 Matrices equivalentes. El método de Gauss Dada una matriz A cualquiera decimos que B es equivalente a A si podemos transformar A en B mediante una combinación de las siguientes operaciones: Multiplicar
Matrices equivalentes. El método de Gauss Dada una matriz A cualquiera decimos que B es equivalente a A si podemos transformar A en B mediante una combinación de las siguientes operaciones: Multiplicar
TEMA 6. EIGENVALORES Y EIGENVECTORES
 TEMA 6. EIGENVALORES Y EIGENVECTORES M. C. Roberto Rosales Flores INSTITUTO TECNOLÓGICO SUPERIOR DE TLAXCO Ingeniería en Logística M. C. Roberto Rosales Flores (ITST TEMA 6. EIGENVALORES Y EIGENVECTORES
TEMA 6. EIGENVALORES Y EIGENVECTORES M. C. Roberto Rosales Flores INSTITUTO TECNOLÓGICO SUPERIOR DE TLAXCO Ingeniería en Logística M. C. Roberto Rosales Flores (ITST TEMA 6. EIGENVALORES Y EIGENVECTORES
Valores propios y vectores propios
 Capítulo 6 Valores propios y vectores propios En este capítulo investigaremos qué propiedades son intrínsecas a una matriz, o su aplicación lineal asociada. Como veremos, el hecho de que existen muchas
Capítulo 6 Valores propios y vectores propios En este capítulo investigaremos qué propiedades son intrínsecas a una matriz, o su aplicación lineal asociada. Como veremos, el hecho de que existen muchas
Tema 3: Aplicaciones de la diagonalización
 TEORÍA DE ÁLGEBRA II: Tema 3. DIPLOMATURA DE ESTADÍSTICA 1 Tema 3: Aplicaciones de la diagonalización 1 Ecuaciones en diferencias Estudiando la cría de conejos, Fibonacci llegó a las siguientes conclusiones:
TEORÍA DE ÁLGEBRA II: Tema 3. DIPLOMATURA DE ESTADÍSTICA 1 Tema 3: Aplicaciones de la diagonalización 1 Ecuaciones en diferencias Estudiando la cría de conejos, Fibonacci llegó a las siguientes conclusiones:
Sistemas de ecuaciones lineales
 Sistemas de ecuaciones lineales Problemas teóricos Sistemas de ecuaciones lineales con parámetros En los siguientes problemas hay que resolver el sistema de ecuaciones lineales para todo valor del parámetro
Sistemas de ecuaciones lineales Problemas teóricos Sistemas de ecuaciones lineales con parámetros En los siguientes problemas hay que resolver el sistema de ecuaciones lineales para todo valor del parámetro
Diagonalización de matrices
 diagonalizacion.nb Diagonalización de matrices Práctica de Álgebra Lineal, E.U.A.T., Grupos ºA y ºB, 2005 Algo de teoría Qué es diagonalizar una matriz? Para estudiar una matriz suele ser conveniente expresarla
diagonalizacion.nb Diagonalización de matrices Práctica de Álgebra Lineal, E.U.A.T., Grupos ºA y ºB, 2005 Algo de teoría Qué es diagonalizar una matriz? Para estudiar una matriz suele ser conveniente expresarla
BASES Y DIMENSIÓN. Propiedades de las bases. Ejemplos de bases.
 BASES Y DIMENSIÓN Definición: Base. Se llama base de un espacio (o subespacio) vectorial a un sistema generador de dicho espacio o subespacio, que sea a la vez linealmente independiente. β Propiedades
BASES Y DIMENSIÓN Definición: Base. Se llama base de un espacio (o subespacio) vectorial a un sistema generador de dicho espacio o subespacio, que sea a la vez linealmente independiente. β Propiedades
Nota 1. Los determinantes de orden superior a 3 se calculan aplicando las siguientes propiedades:
 Capítulo 1 DETERMINANTES Definición 1 (Matriz traspuesta) Llamaremos matriz traspuesta de A = (a ij ) a la matriz A t = (a ji ); es decir la matriz que consiste en poner las filas de A como columnas Definición
Capítulo 1 DETERMINANTES Definición 1 (Matriz traspuesta) Llamaremos matriz traspuesta de A = (a ij ) a la matriz A t = (a ji ); es decir la matriz que consiste en poner las filas de A como columnas Definición
Matrices Invertibles y Elementos de Álgebra Matricial
 Matrices Invertibles y Elementos de Álgebra Matricial Departamento de Matemáticas, CCIR/ITESM 12 de enero de 2011 Índice 91 Introducción 1 92 Transpuesta 1 93 Propiedades de la transpuesta 2 94 Matrices
Matrices Invertibles y Elementos de Álgebra Matricial Departamento de Matemáticas, CCIR/ITESM 12 de enero de 2011 Índice 91 Introducción 1 92 Transpuesta 1 93 Propiedades de la transpuesta 2 94 Matrices
4.- Para los siguientes conjuntos de vectores, probar si son o no subespacios vectoriales de R 4 : 2d + 1 : b, d reales. d
 GRADO EN I. TELEMÁTICA. HOJA : ESPACIOS VECTORIALES. ESPACIOS NULO Y COLUMNA.- Sea W el conjunto de todos los vectores de R de la forma subespacio de R. s + t s t s t t, con s, t R. Probar que W es un.-
GRADO EN I. TELEMÁTICA. HOJA : ESPACIOS VECTORIALES. ESPACIOS NULO Y COLUMNA.- Sea W el conjunto de todos los vectores de R de la forma subespacio de R. s + t s t s t t, con s, t R. Probar que W es un.-
Contenido. 1 Definiciones y propiedades. 2. Método de la potencia. 3. Método de la potencia inversa. 4. Método de la potencia inversa desplazada.
 Métodos Numéricos: Resumen y ejemplos Tema 7: Valores y vectores propios Francisco Palacios Escuela Politécnica Superior de Ingeniería de Manresa Universidad Politécnica de Cataluña Abril 9 Versión 7 Contenido
Métodos Numéricos: Resumen y ejemplos Tema 7: Valores y vectores propios Francisco Palacios Escuela Politécnica Superior de Ingeniería de Manresa Universidad Politécnica de Cataluña Abril 9 Versión 7 Contenido
Espacios generados, dependencia lineal y bases
 Espacios generados dependencia lineal y bases Departamento de Matemáticas CCIR/ITESM 14 de enero de 2011 Índice 14.1. Introducción............................................... 1 14.2. Espacio Generado............................................
Espacios generados dependencia lineal y bases Departamento de Matemáticas CCIR/ITESM 14 de enero de 2011 Índice 14.1. Introducción............................................... 1 14.2. Espacio Generado............................................
Tema 7: Valores y vectores propios
 Tema 7: es y clausura s Espacios y Permutaciones es y clausura Una permutación p = {p 1, p 2,..., p n } de los números {1, 2,..., n} es una nueva ordenación de los elementos {1, 2,..., n}, es decir, un
Tema 7: es y clausura s Espacios y Permutaciones es y clausura Una permutación p = {p 1, p 2,..., p n } de los números {1, 2,..., n} es una nueva ordenación de los elementos {1, 2,..., n}, es decir, un
Comenzaremos recordando algunas definiciones y propiedades estudiadas en el capítulo anterior.
 Capítulo 2 Matrices En el capítulo anterior hemos utilizado matrices para la resolución de sistemas de ecuaciones lineales y hemos visto que, para n, m N, el conjunto de las matrices de n filas y m columnas
Capítulo 2 Matrices En el capítulo anterior hemos utilizado matrices para la resolución de sistemas de ecuaciones lineales y hemos visto que, para n, m N, el conjunto de las matrices de n filas y m columnas
Espacios vectoriales y aplicaciones lineales.
 Práctica 2 Espacios vectoriales y aplicaciones lineales. Contenido: Localizar bases de espacios vectoriales. Suma directa. Bases y dimensiones. Cambio de base. Aplicaciones lineales. Matriz asociada en
Práctica 2 Espacios vectoriales y aplicaciones lineales. Contenido: Localizar bases de espacios vectoriales. Suma directa. Bases y dimensiones. Cambio de base. Aplicaciones lineales. Matriz asociada en
1. INVERSA DE UNA MATRIZ REGULAR
 . INVERSA DE UNA MATRIZ REGULAR Calcular la inversa de una matriz regular es un trabajo bastante tedioso. A través de ejemplos se expondrán diferentes técnicas para calcular la matriz inversa de una matriz
. INVERSA DE UNA MATRIZ REGULAR Calcular la inversa de una matriz regular es un trabajo bastante tedioso. A través de ejemplos se expondrán diferentes técnicas para calcular la matriz inversa de una matriz
ÁLGEBRA DE MATRICES. Al consejero A no le gusta ninguno de sus colegas como presidente.
 ÁLGEBRA DE MATRICES Página 49 REFLEXIONA Y RESUELVE Elección de presidente Ayudándote de la tabla, estudia detalladamente los resultados de la votación, analiza algunas características de los participantes
ÁLGEBRA DE MATRICES Página 49 REFLEXIONA Y RESUELVE Elección de presidente Ayudándote de la tabla, estudia detalladamente los resultados de la votación, analiza algunas características de los participantes
E 1 E 2 E 2 E 3 E 4 E 5 2E 4
 Problemas resueltos de Espacios Vectoriales: 1- Para cada uno de los conjuntos de vectores que se dan a continuación estudia si son linealmente independientes, sistema generador o base: a) (2, 1, 1, 1),
Problemas resueltos de Espacios Vectoriales: 1- Para cada uno de los conjuntos de vectores que se dan a continuación estudia si son linealmente independientes, sistema generador o base: a) (2, 1, 1, 1),
TEMA 1. VECTORES Y MATRICES
 TEMA 1. VECTORES Y MATRICES 1.1. Definición de vector. Operaciones elementales 1.2. Matrices. Operaciones elementales 1.3. Traza y Determinante 1.4. Aplicaciones 1.1. DEFINICIÓN DE VECTOR. OPERACIONES
TEMA 1. VECTORES Y MATRICES 1.1. Definición de vector. Operaciones elementales 1.2. Matrices. Operaciones elementales 1.3. Traza y Determinante 1.4. Aplicaciones 1.1. DEFINICIÓN DE VECTOR. OPERACIONES
VECTORES. Módulo, dirección y sentido de un vector fijo En un vector fijo se llama módulo del mismo a la longitud del segmento que lo define.
 VECTORES El estudio de los vectores es uno de tantos conocimientos de las matemáticas que provienen de la física. En esta ciencia se distingue entre magnitudes escalares y magnitudes vectoriales. Se llaman
VECTORES El estudio de los vectores es uno de tantos conocimientos de las matemáticas que provienen de la física. En esta ciencia se distingue entre magnitudes escalares y magnitudes vectoriales. Se llaman
EJERCICIOS DE MATEMÁTICAS I HOJA 4. Ejercicio 1. Se consideran los vectores
 EJERCICIOS DE MATEMÁTICAS I HOJA 4 Ejercicio 1. Se consideran los vectores u 1 = (1, 1, 0, 1), u 2 = (0, 2, 1, 0), u 3 = ( 1, 1, 1, 1), u 4 = (2, 2, 1, 0) de R 4. Expresa, si es posible, los vectores u
EJERCICIOS DE MATEMÁTICAS I HOJA 4 Ejercicio 1. Se consideran los vectores u 1 = (1, 1, 0, 1), u 2 = (0, 2, 1, 0), u 3 = ( 1, 1, 1, 1), u 4 = (2, 2, 1, 0) de R 4. Expresa, si es posible, los vectores u
Ejemplo 1.2 En el capitulo anterior se demostró que el conjunto. V = IR 2 = {(x, y) : x, y IR}
 : x, y IR}") Subespacios Capítulo 1 Definición 1.1 Subespacio Sea H un subconjunto no vacio de un espacio vectorial V K. Si H es un espacio vectorial sobre K bajo las operaciones de suma y multiplicación por escalar
Subespacios Capítulo 1 Definición 1.1 Subespacio Sea H un subconjunto no vacio de un espacio vectorial V K. Si H es un espacio vectorial sobre K bajo las operaciones de suma y multiplicación por escalar
Los polinomios. Un polinomio es una expresión algebraica con una única letra, llamada variable. Ejemplo: 9x 6 3x 4 + x 6 polinomio de variable x
 Los polinomios Los polinomios Un polinomio es una expresión algebraica con una única letra, llamada variable. Ejemplo: 9x 6 3x 4 + x 6 polinomio de variable x Elementos de un polinomio Los términos: cada
Los polinomios Los polinomios Un polinomio es una expresión algebraica con una única letra, llamada variable. Ejemplo: 9x 6 3x 4 + x 6 polinomio de variable x Elementos de un polinomio Los términos: cada
Calcular la dimensión, una base y unas ecuaciones implícitas linealmente independientes del núcleo e imagen de
 Calcular la dimensión, una base y unas ecuaciones implícitas linealmente independientes del núcleo e imagen de 1 (a) f(x 1, x 2, x 3 ) = (x 1 + x 3, x 2 + x 3, x 1 + x 3, x 2 + x 3 ) (b) f(x 1, x 2, x
Calcular la dimensión, una base y unas ecuaciones implícitas linealmente independientes del núcleo e imagen de 1 (a) f(x 1, x 2, x 3 ) = (x 1 + x 3, x 2 + x 3, x 1 + x 3, x 2 + x 3 ) (b) f(x 1, x 2, x
Al consejero A no le gusta ninguno de sus colegas como presidente. Dos consejeros (C y E) están de acuerdo en los mismos candidatos (B, C y D).
 están de acuerdo en los mismos candidatos (B, C y D).") ÁLGEBRA DE MATRICE Página 48 Ayudándote de la tabla... De la tabla podemos deducir muchas cosas: Al consejero A no le gusta ninguno de sus colegas como presidente. B solo tiene un candidato el C. Dos consejeros
ÁLGEBRA DE MATRICE Página 48 Ayudándote de la tabla... De la tabla podemos deducir muchas cosas: Al consejero A no le gusta ninguno de sus colegas como presidente. B solo tiene un candidato el C. Dos consejeros
VECTORES EN EL ESPACIO. 1. Determina el valor de t para que los vectores de coordenadas sean linealmente dependientes.
 VECTORES EN EL ESPACIO. Determina el valor de t para que los vectores de coordenadas (,, t), 0, t, t) y(, 2, t) sean linealmente dependientes. Si son linealmente dependientes, uno de ellos, se podrá expresar
VECTORES EN EL ESPACIO. Determina el valor de t para que los vectores de coordenadas (,, t), 0, t, t) y(, 2, t) sean linealmente dependientes. Si son linealmente dependientes, uno de ellos, se podrá expresar
Curso de Procesamiento Digital de Imágenes
 Curso de Procesamiento Digital de Imágenes Impartido por: Elena Martínez Departamento de Ciencias de la Computación IIMAS, UNAM, cubículo 408 http://turing.iimas.unam.mx/~elena/teaching/pdi-lic.html elena.martinez@iimas.unam.mx
Curso de Procesamiento Digital de Imágenes Impartido por: Elena Martínez Departamento de Ciencias de la Computación IIMAS, UNAM, cubículo 408 http://turing.iimas.unam.mx/~elena/teaching/pdi-lic.html elena.martinez@iimas.unam.mx
Matrices. Definiciones básicas de matrices. www.math.com.mx. José de Jesús Angel Angel. jjaa@math.com.mx
 Matrices Definiciones básicas de matrices wwwmathcommx José de Jesús Angel Angel jjaa@mathcommx MathCon c 2007-2008 Contenido 1 Matrices 2 11 Matrices cuadradas 3 12 Matriz transpuesta 4 13 Matriz identidad
Matrices Definiciones básicas de matrices wwwmathcommx José de Jesús Angel Angel jjaa@mathcommx MathCon c 2007-2008 Contenido 1 Matrices 2 11 Matrices cuadradas 3 12 Matriz transpuesta 4 13 Matriz identidad
Aplicaciones Lineales
 Aplicaciones Lineales Concepto de aplicación lineal T : V W Definición: Si V y W son espacios vectoriales con los mismos escalares (por ejemplo, ambos espacios vectoriales reales o ambos espacios vectoriales
Aplicaciones Lineales Concepto de aplicación lineal T : V W Definición: Si V y W son espacios vectoriales con los mismos escalares (por ejemplo, ambos espacios vectoriales reales o ambos espacios vectoriales
Anexo 1: Demostraciones
 75 Matemáticas I : Álgebra Lineal Anexo 1: Demostraciones Espacios vectoriales Demostración de: Propiedades 89 de la página 41 Propiedades 89- Algunas propiedades que se deducen de las anteriores son:
75 Matemáticas I : Álgebra Lineal Anexo 1: Demostraciones Espacios vectoriales Demostración de: Propiedades 89 de la página 41 Propiedades 89- Algunas propiedades que se deducen de las anteriores son:
Cómo?: Resolviendo el sistema lineal homógeneo que satisfacen las componentes de cualquier vector de S. x4 = x 1 x 3 = x 2 x 1
 . ESPACIOS VECTORIALES Consideremos el siguiente subconjunto de R 4 : S = {(x, x 2, x 3, x 4 )/x x 4 = 0 x 2 x 4 = x 3 a. Comprobar que S es subespacio vectorial de R 4. Para demostrar que S es un subespacio
. ESPACIOS VECTORIALES Consideremos el siguiente subconjunto de R 4 : S = {(x, x 2, x 3, x 4 )/x x 4 = 0 x 2 x 4 = x 3 a. Comprobar que S es subespacio vectorial de R 4. Para demostrar que S es un subespacio
4 APLICACIONES LINEALES. DIAGONALIZACIÓN
 4 APLICACIONES LINEALES DIAGONALIZACIÓN DE MATRICES En ocasiones, y con objeto de simplificar ciertos cálculos, es conveniente poder transformar una matriz en otra matriz lo más sencilla posible Esto nos
4 APLICACIONES LINEALES DIAGONALIZACIÓN DE MATRICES En ocasiones, y con objeto de simplificar ciertos cálculos, es conveniente poder transformar una matriz en otra matriz lo más sencilla posible Esto nos
Definición 1.1.1. Dados dos números naturales m y n, una matriz de orden o dimensión m n es una tabla numérica rectangular con m filas y n columnas.
 Tema 1 Matrices Estructura del tema. Conceptos básicos y ejemplos Operaciones básicas con matrices Método de Gauss Rango de una matriz Concepto de matriz regular y propiedades Determinante asociado a una
Tema 1 Matrices Estructura del tema. Conceptos básicos y ejemplos Operaciones básicas con matrices Método de Gauss Rango de una matriz Concepto de matriz regular y propiedades Determinante asociado a una
RELACIONES DE RECURRENCIA
 Unidad 3 RELACIONES DE RECURRENCIA 60 Capítulo 5 RECURSIÓN Objetivo general Conocer en forma introductoria los conceptos propios de la recurrencia en relación con matemática discreta. Objetivos específicos
Unidad 3 RELACIONES DE RECURRENCIA 60 Capítulo 5 RECURSIÓN Objetivo general Conocer en forma introductoria los conceptos propios de la recurrencia en relación con matemática discreta. Objetivos específicos
UNIDAD 6. POLINOMIOS CON COEFICIENTES ENTEROS
 UNIDAD 6. POLINOMIOS CON COEFICIENTES ENTEROS Unidad 6: Polinomios con coeficientes enteros. Al final deberás haber aprendido... Expresar algebraicamente enunciados sencillos. Extraer enunciados razonables
UNIDAD 6. POLINOMIOS CON COEFICIENTES ENTEROS Unidad 6: Polinomios con coeficientes enteros. Al final deberás haber aprendido... Expresar algebraicamente enunciados sencillos. Extraer enunciados razonables
GEOMETRÍA ANALÍTICA 2º Curso de Bachillerato 22 de mayo de 2008
 1. Sean los puntos A (1, 0,-1) y B (,-1, 3). Calcular la distancia del origen de coordenadas a la recta que pasa por A y B. Calculemos la recta que pasa por A y B. El vector AB es (1,-1,4) y por tanto
1. Sean los puntos A (1, 0,-1) y B (,-1, 3). Calcular la distancia del origen de coordenadas a la recta que pasa por A y B. Calculemos la recta que pasa por A y B. El vector AB es (1,-1,4) y por tanto
Tema 07. LÍMITES Y CONTINUIDAD DE FUNCIONES
 Tema 07 LÍMITES Y CONTINUIDAD DE FUNCIONES Límite de una función en un punto Vamos a estudiar el comportamiento de las funciones f ( ) g ( ) ENT[ ] h ( ) i ( ) en el punto Para ello, damos a valores próimos
Tema 07 LÍMITES Y CONTINUIDAD DE FUNCIONES Límite de una función en un punto Vamos a estudiar el comportamiento de las funciones f ( ) g ( ) ENT[ ] h ( ) i ( ) en el punto Para ello, damos a valores próimos
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD CULHUACÁN INTEGRANTES
 INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD CULHUACÁN INTEGRANTES CÁRDENAS ESPINOSA CÉSAR OCTAVIO racsec_05@hotmail.com Boleta: 2009350122 CASTILLO GUTIÉRREZ
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA UNIDAD CULHUACÁN INTEGRANTES CÁRDENAS ESPINOSA CÉSAR OCTAVIO racsec_05@hotmail.com Boleta: 2009350122 CASTILLO GUTIÉRREZ
a < b y se lee "a es menor que b" (desigualdad estricta) a > b y se lee "a es mayor que b" (desigualdad estricta)
 a > b y se lee a es mayor que b (desigualdad estricta)") Desigualdades Dadas dos rectas que se cortan, llamadas ejes (rectangulares si son perpendiculares, y oblicuos en caso contrario), un punto puede situarse conociendo las distancias del mismo a los ejes,
Desigualdades Dadas dos rectas que se cortan, llamadas ejes (rectangulares si son perpendiculares, y oblicuos en caso contrario), un punto puede situarse conociendo las distancias del mismo a los ejes,
(Ec.1) 2α + β = b (Ec.4) (Ec.3)
 2α + β = b (Ec.4) (Ec.3)") Problema 1. Hallar t R para que el vector x = (3, 8, t) pertenezca al subespacio engendrado por los vectores u = (1, 2, 3) y v = (1, 3, 1). Solución del problema 1. x L{ u, v} si, y sólo si, existen α,
Problema 1. Hallar t R para que el vector x = (3, 8, t) pertenezca al subespacio engendrado por los vectores u = (1, 2, 3) y v = (1, 3, 1). Solución del problema 1. x L{ u, v} si, y sólo si, existen α,
6.1 Definición de valores y vectores característicos de una matriz cuadrada
 6.Valores y Vectores Característicos 6. Definición de valores y vectores característicos de una matriz cuadrada El cálculo de los valores propios y de los vectores propios de una matriz simétrica tiene
6.Valores y Vectores Característicos 6. Definición de valores y vectores característicos de una matriz cuadrada El cálculo de los valores propios y de los vectores propios de una matriz simétrica tiene
EXPRESIONES ALGEBRAICAS. POLINOMIOS
 EXPRESIONES ALGEBRAICAS. POLINOMIOS 1. EXPRESIONES ALGEBRAICAS. Estas expresiones del área son expresiones algebraicas, ya que además de números aparecen letras. Son también expresiones algebraicas: bac,
EXPRESIONES ALGEBRAICAS. POLINOMIOS 1. EXPRESIONES ALGEBRAICAS. Estas expresiones del área son expresiones algebraicas, ya que además de números aparecen letras. Son también expresiones algebraicas: bac,
Polinomios: Definición: Se llama polinomio en "x" de grado "n" a una expresión del tipo
 Polinomios: Definición: Se llama polinomio en "x" de grado "n" a una expresión del tipo P (x) = a 0 x n + a 1 x n 1 +... + a n Donde n N (número natural) ; a 0, a 1, a 2,..., a n son coeficientes reales
Polinomios: Definición: Se llama polinomio en "x" de grado "n" a una expresión del tipo P (x) = a 0 x n + a 1 x n 1 +... + a n Donde n N (número natural) ; a 0, a 1, a 2,..., a n son coeficientes reales
Álgebra y Matemática Discreta Sesión de Prácticas 10
 Álgebra y Matemática Discreta Sesión de Prácticas 10 (c) 2013 Leandro Marín, Francisco J. Vera, Gema M. Díaz 18 Nov 2013-24 Nov 2013 Núcleos e Imágenes Definición Sea f : V W una aplicación lineal. Se
Álgebra y Matemática Discreta Sesión de Prácticas 10 (c) 2013 Leandro Marín, Francisco J. Vera, Gema M. Díaz 18 Nov 2013-24 Nov 2013 Núcleos e Imágenes Definición Sea f : V W una aplicación lineal. Se
Clase 15 Espacios vectoriales Álgebra Lineal
 Espacios vectoriales Clase 5 Espacios vectoriales Álgebra Lineal Código Escuela de Matemáticas - Facultad de Ciencias Universidad Nacional de Colombia En esta sección estudiaremos uno de los conceptos
Espacios vectoriales Clase 5 Espacios vectoriales Álgebra Lineal Código Escuela de Matemáticas - Facultad de Ciencias Universidad Nacional de Colombia En esta sección estudiaremos uno de los conceptos
Matrices invertibles. La inversa de una matriz
 Matrices invertibles. La inversa de una matriz Objetivos. Estudiar la definición y las propiedades básicas de la matriz inversa. Más adelante en este curso vamos a estudiar criterios de invertibilidad
Matrices invertibles. La inversa de una matriz Objetivos. Estudiar la definición y las propiedades básicas de la matriz inversa. Más adelante en este curso vamos a estudiar criterios de invertibilidad
Matrices y sus operaciones
 Capítulo 1 Matrices y sus operaciones 1.1. Definiciones Dados dos enteros m, n 1 y un cuerpo conmutativo IK, llamamos matriz de m filas y n columnas con coeficientes en IK a un conjunto ordenado de n vectores
Capítulo 1 Matrices y sus operaciones 1.1. Definiciones Dados dos enteros m, n 1 y un cuerpo conmutativo IK, llamamos matriz de m filas y n columnas con coeficientes en IK a un conjunto ordenado de n vectores
1º) Siempre que se pueda, hay que sacar factor común: :a b ± a c ± a d ± = a (b ± c ± d ± ):
 Siempre que se pueda, hay que sacar factor común: :a b ± a c ± a d ± = a (b ± c ± d ± ):") Pág. 1 de 7 FAC T O R I Z AC I Ó N D E P O L I N O M I O S Factorizar (o descomponer en factores) un polinomio consiste en sustituirlo por un producto indicado de otros de menor grado tales que si se multiplicasen
Pág. 1 de 7 FAC T O R I Z AC I Ó N D E P O L I N O M I O S Factorizar (o descomponer en factores) un polinomio consiste en sustituirlo por un producto indicado de otros de menor grado tales que si se multiplicasen
PROBLEMA 1. 1. [1.5 puntos] Obtener la ecuación de la recta tangente en el punto ( 2, 1) a la curva dada implícitamente por y 3 +3y 2 = x 4 3x 2.
![PROBLEMA 1. 1. [1.5 puntos] Obtener la ecuación de la recta tangente en el punto ( 2, 1) a la curva dada implícitamente por y 3 +3y 2 = x 4 3x 2.](/thumbs/27/11795036.jpg "PROBLEMA 1. 1. [1.5 puntos] Obtener la ecuación de la recta tangente en el punto ( 2, 1) a la curva dada implícitamente por y 3 +3y 2 = x 4 3x 2.") PROBLEMA. ESCUELA UNIVERSITARIA POLITÉCNICA DE SEVILLA Ingeniería Técnica en Diseño Industrial Fundamentos Matemáticos de la Ingeniería Soluciones correspondientes a los problemas del Primer Parcial 7/8.
PROBLEMA. ESCUELA UNIVERSITARIA POLITÉCNICA DE SEVILLA Ingeniería Técnica en Diseño Industrial Fundamentos Matemáticos de la Ingeniería Soluciones correspondientes a los problemas del Primer Parcial 7/8.
Nivelación de Matemática MTHA UNLP 1. Vectores
 Nivelación de Matemática MTHA UNLP 1 1. Definiciones básicas Vectores 1.1. Magnitudes escalares y vectoriales. Hay magnitudes que quedan determinadas dando un solo número real: su medida. Por ejemplo:
Nivelación de Matemática MTHA UNLP 1 1. Definiciones básicas Vectores 1.1. Magnitudes escalares y vectoriales. Hay magnitudes que quedan determinadas dando un solo número real: su medida. Por ejemplo:
3 Espacios Vectoriales
 Prof. Susana López 31 3 Espacios Vectoriales 3.1 Introducción Un ector fijo en el plano no es más que un segmento orientado en el que hay que distinguir tres características: -dirección: la de la recta
Prof. Susana López 31 3 Espacios Vectoriales 3.1 Introducción Un ector fijo en el plano no es más que un segmento orientado en el que hay que distinguir tres características: -dirección: la de la recta
Operaciones con polinomios
 Operaciones con polinomios Los polinomios son una generalización de nuestro sistema de numeración. Cuando escribimos un número, por ejemplo, 2 354, queremos decir: 2 354 = 2 000 + 300 + 50 + 4 = 2)1 000)
Operaciones con polinomios Los polinomios son una generalización de nuestro sistema de numeración. Cuando escribimos un número, por ejemplo, 2 354, queremos decir: 2 354 = 2 000 + 300 + 50 + 4 = 2)1 000)
Tema 1. VECTORES (EN EL PLANO Y EN EL ESPACIO)
") Vectores Tema. VECTORES (EN EL PLANO Y EN EL ESPACIO Definición de espacio vectorial Un conjunto E es un espacio vectorial si en él se definen dos operaciones, una interna (suma y otra externa (producto
Vectores Tema. VECTORES (EN EL PLANO Y EN EL ESPACIO Definición de espacio vectorial Un conjunto E es un espacio vectorial si en él se definen dos operaciones, una interna (suma y otra externa (producto
Descomposición factorial de polinomios
 Descomposición factorial de polinomios Contenidos del tema Introducción Sacar factor común Productos notables Fórmula de la ecuación de segundo grado Método de Ruffini y Teorema del Resto Combinación de
Descomposición factorial de polinomios Contenidos del tema Introducción Sacar factor común Productos notables Fórmula de la ecuación de segundo grado Método de Ruffini y Teorema del Resto Combinación de
Objetivos: Al inalizar la unidad, el alumno:
 Unidad 3 espacios vectoriales Objetivos: Al inalizar la unidad, el alumno: Describirá las características de un espacio vectorial. Identiicará las propiedades de los subespacios vectoriales. Ejempliicará
Unidad 3 espacios vectoriales Objetivos: Al inalizar la unidad, el alumno: Describirá las características de un espacio vectorial. Identiicará las propiedades de los subespacios vectoriales. Ejempliicará
RESOLUCIÓN DE SISTEMAS DE ECUACIONES LINEALES
 RESOLUCIÓN DE SISTEMAS DE ECUACIONES LINEALES 1 La ecuación 2x - 3 = 0 se llama ecuación lineal de una variable. Obviamente sólo tiene una solución. La ecuación -3x + 2y = 7 se llama ecuación lineal de
RESOLUCIÓN DE SISTEMAS DE ECUACIONES LINEALES 1 La ecuación 2x - 3 = 0 se llama ecuación lineal de una variable. Obviamente sólo tiene una solución. La ecuación -3x + 2y = 7 se llama ecuación lineal de
1 Espacios y subespacios vectoriales.
 UNIVERSIDAD POLITÉCNICA DE CARTAGENA Departamento de Matemática Aplicada y Estadística Espacios vectoriales y sistemas de ecuaciones 1 Espacios y subespacios vectoriales Definición 1 Sea V un conjunto
UNIVERSIDAD POLITÉCNICA DE CARTAGENA Departamento de Matemática Aplicada y Estadística Espacios vectoriales y sistemas de ecuaciones 1 Espacios y subespacios vectoriales Definición 1 Sea V un conjunto
Aplicaciones Lineales
 Aplicaciones Lineales Ejercicio Dada la matriz A = 0 2 0 a) Escribir explícitamente la aplicación lineal f : 2 cuya matriz asociada con respecto a las bases canónicas es A. En primer lugar definimos las
Aplicaciones Lineales Ejercicio Dada la matriz A = 0 2 0 a) Escribir explícitamente la aplicación lineal f : 2 cuya matriz asociada con respecto a las bases canónicas es A. En primer lugar definimos las
Espacios vectoriales. Bases. Coordenadas
 Capítulo 5 Espacios vectoriales. Bases. Coordenadas OPERACIONES ENR n Recordemos que el producto cartesiano de dos conjuntos A y B consiste en los pares ordenados (a,b) tales que a A y b B. Cuando consideramos
Capítulo 5 Espacios vectoriales. Bases. Coordenadas OPERACIONES ENR n Recordemos que el producto cartesiano de dos conjuntos A y B consiste en los pares ordenados (a,b) tales que a A y b B. Cuando consideramos
Estructuras algebraicas
 Tema 2 Estructuras algebraicas básicas 2.1. Operación interna Definición 29. Dados tres conjuntos A, B y C, se llama ley de composición en los conjuntos A y B y resultado en el conjunto C, y se denota
Tema 2 Estructuras algebraicas básicas 2.1. Operación interna Definición 29. Dados tres conjuntos A, B y C, se llama ley de composición en los conjuntos A y B y resultado en el conjunto C, y se denota
PROPIOS. DIAGONALIZACIÓN DE MATRICES CUADRADAS
 Tema 7.- VALORES Y VECTORES PROPIOS. DIAGONALIZACIÓN DE MATRICES CUADRADAS VALORES Y VECTORES PROPIOS MATRICES CUADRADAS DIAGONALIZABLES DIAGONALIZACIÓN N ORTOGONAL DE MATRICES CUADRADAS SIMÉTRICAS 1 Un
Tema 7.- VALORES Y VECTORES PROPIOS. DIAGONALIZACIÓN DE MATRICES CUADRADAS VALORES Y VECTORES PROPIOS MATRICES CUADRADAS DIAGONALIZABLES DIAGONALIZACIÓN N ORTOGONAL DE MATRICES CUADRADAS SIMÉTRICAS 1 Un
NÚMEROS NATURALES Y NÚMEROS ENTEROS
 NÚMEROS NATURALES Y NÚMEROS ENTEROS Los números naturales surgen como respuesta a la necesidad de nuestros antepasados de contar los elementos de un conjunto (por ejemplo los animales de un rebaño) y de
NÚMEROS NATURALES Y NÚMEROS ENTEROS Los números naturales surgen como respuesta a la necesidad de nuestros antepasados de contar los elementos de un conjunto (por ejemplo los animales de un rebaño) y de
Matemáticas I: Hoja 3 Espacios vectoriales y subespacios vectoriales
 Matemáticas I: Hoa 3 Espacios vectoriales y subespacios vectoriales Eercicio 1. Demostrar que los vectores v 1, v 2, v 3, v 4 expresados en la base canónica forman una base. Dar las coordenadas del vector
Matemáticas I: Hoa 3 Espacios vectoriales y subespacios vectoriales Eercicio 1. Demostrar que los vectores v 1, v 2, v 3, v 4 expresados en la base canónica forman una base. Dar las coordenadas del vector
Recurrencias lineales
 Recurrencias lineales Juan-Miguel Gracia 10 de febrero de 2008 Recurrencias lineales 68 Las recurrencias lineales son ecuaciones en las que la incógnita es una sucesión numérica (x k ) k=0 que aparece
Recurrencias lineales Juan-Miguel Gracia 10 de febrero de 2008 Recurrencias lineales 68 Las recurrencias lineales son ecuaciones en las que la incógnita es una sucesión numérica (x k ) k=0 que aparece
Aplicaciones Lineales
 Aplicaciones Lineales Primeras definiciones Una aplicación lineal de un K-ev de salida E a un K-ev de llegada F es una aplicación f : E F tal que f(u + v) = f(u) + f(v) para todos u v E f(λ u) = λ f(u)
Aplicaciones Lineales Primeras definiciones Una aplicación lineal de un K-ev de salida E a un K-ev de llegada F es una aplicación f : E F tal que f(u + v) = f(u) + f(v) para todos u v E f(λ u) = λ f(u)
13.TRANSFORMACIONES LINEALES 273 13.1. DEFINICIÓN DE TRANSFORMACIÓN LINEAL... 273 13.2. DETERMINACIÓN DE UNA TRANSFORMACIÓN LINEAL... 275 13.3.
 ÍNDICE 13.TRANSFORMACIONES LINEALES 273 13.1. DEFINICIÓN DE TRANSFORMACIÓN LINEAL............. 273 13.2. DETERMINACIÓN DE UNA TRANSFORMACIÓN LINEAL...... 275 13.3. REPRESENTACIÓN MATRICIAL DE UNA TRANSFORMACIÓN
ÍNDICE 13.TRANSFORMACIONES LINEALES 273 13.1. DEFINICIÓN DE TRANSFORMACIÓN LINEAL............. 273 13.2. DETERMINACIÓN DE UNA TRANSFORMACIÓN LINEAL...... 275 13.3. REPRESENTACIÓN MATRICIAL DE UNA TRANSFORMACIÓN
Sistemas de Ecuaciones Lineales y Matrices
 Sistemas de Ecuaciones Lineales y Matrices Oscar G Ibarra-Manzano, DSc Departamento de Area Básica - Tronco Común DES de Ingenierías Facultad de Ingeniería, Mecánica, Eléctrica y Electrónica Trimestre
Sistemas de Ecuaciones Lineales y Matrices Oscar G Ibarra-Manzano, DSc Departamento de Area Básica - Tronco Común DES de Ingenierías Facultad de Ingeniería, Mecánica, Eléctrica y Electrónica Trimestre
21.1.2. TEOREMA DE DETERMINACIÓN DE APLICACIONES LINEALES
 Aplicaciones lineales. Matriz de una aplicación lineal 2 2. APLICACIONES LINEALES. MATRIZ DE UNA APLICACIÓN LINEAL El efecto que produce el cambio de coordenadas sobre una imagen situada en el plano sugiere
Aplicaciones lineales. Matriz de una aplicación lineal 2 2. APLICACIONES LINEALES. MATRIZ DE UNA APLICACIÓN LINEAL El efecto que produce el cambio de coordenadas sobre una imagen situada en el plano sugiere
ESPACIO VECTORIAL ESPACIO VECTORIAL SUBESPACIO VECTORIAL BASE Y DIMENSIÓN N DE UN
 Tema 5.- ESPACIOS VECTORIALES ESPACIO VECTORIAL SUBESPACIO VECTORIAL BASE Y DIMENSIÓN N DE UN ESPACIO VECTORIAL Fundamentos Matemáticosde la Ingeniería 1 Aunque históricamente el primer trabajo de Álgebra
Tema 5.- ESPACIOS VECTORIALES ESPACIO VECTORIAL SUBESPACIO VECTORIAL BASE Y DIMENSIÓN N DE UN ESPACIO VECTORIAL Fundamentos Matemáticosde la Ingeniería 1 Aunque históricamente el primer trabajo de Álgebra
E. T. S. de Ingenieros Industriales Universidad Politécnica de Madrid. Grado en Ingeniería en Tecnologías Industriales. Grado en Ingeniería Química
 E. T. S. de Ingenieros Industriales Universidad Politécnica de Madrid Grado en Ingeniería en Tecnologías Industriales Grado en Ingeniería Química Apuntes de Álgebra ( Curso 2014/15) Departamento de Matemática
E. T. S. de Ingenieros Industriales Universidad Politécnica de Madrid Grado en Ingeniería en Tecnologías Industriales Grado en Ingeniería Química Apuntes de Álgebra ( Curso 2014/15) Departamento de Matemática
UNIVERSIDADES DE ANDALUCIA PRUEBAS DE ACCESO A LA UNIVERSIDAD. Miguel A. Jorquera
 UNIVERSIDADES DE ANDALUCIA PRUEBAS DE ACCESO A LA UNIVERSIDAD Miguel A. Jorquera BACHILLERATO MATEMÁTICAS II JUNIO 2 ii Índice General 1 Examen Junio 2. Opción B 1 2 SOLUCIONES del examen de junio 2 Opción
UNIVERSIDADES DE ANDALUCIA PRUEBAS DE ACCESO A LA UNIVERSIDAD Miguel A. Jorquera BACHILLERATO MATEMÁTICAS II JUNIO 2 ii Índice General 1 Examen Junio 2. Opción B 1 2 SOLUCIONES del examen de junio 2 Opción
Matrices: Conceptos y Operaciones Básicas
 Matrices: Conceptos y Operaciones Básicas Departamento de Matemáticas, CCIR/ITESM 8 de septiembre de 010 Índice 111 Introducción 1 11 Matriz 1 113 Igualdad entre matrices 11 Matrices especiales 3 115 Suma
Matrices: Conceptos y Operaciones Básicas Departamento de Matemáticas, CCIR/ITESM 8 de septiembre de 010 Índice 111 Introducción 1 11 Matriz 1 113 Igualdad entre matrices 11 Matrices especiales 3 115 Suma
La suma se realiza miembro a miembro. La suma de polinomios goza de las mismas propiedades que la suma de números. Ejemplo:
 Tema 4. Polinomios 1. Definición Un polinomio es una expresión hecha con constantes, variables y exponentes, que están combinados. Los exponentes sólo pueden ser 0, 1, 2, 3,... etc. No puede tener un número
Tema 4. Polinomios 1. Definición Un polinomio es una expresión hecha con constantes, variables y exponentes, que están combinados. Los exponentes sólo pueden ser 0, 1, 2, 3,... etc. No puede tener un número
MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas
 Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema 4 La recta en el plano Elaborado por la Profesora Doctora María Teresa
Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema 4 La recta en el plano Elaborado por la Profesora Doctora María Teresa
Profr. Efraín Soto Apolinar. Función Inversa
 Función Inversa Una función es una relación entre dos variables, de manera que para cada valor de la variable independiente eiste a lo más un único valor asignado a la variable independiente por la función.
Función Inversa Una función es una relación entre dos variables, de manera que para cada valor de la variable independiente eiste a lo más un único valor asignado a la variable independiente por la función.
SISTEMAS DE ECUACIONES LINEALES
 Capítulo 7 SISTEMAS DE ECUACIONES LINEALES 7.1. Introducción Se denomina ecuación lineal a aquella que tiene la forma de un polinomio de primer grado, es decir, las incógnitas no están elevadas a potencias,
Capítulo 7 SISTEMAS DE ECUACIONES LINEALES 7.1. Introducción Se denomina ecuación lineal a aquella que tiene la forma de un polinomio de primer grado, es decir, las incógnitas no están elevadas a potencias,
Vectores en el espacio
 Vectores en el espacio Un sistema de coordenadas tridimensional se construye trazando un eje Z, perpendicular en el origen de coordenadas a los ejes X e Y. Cada punto viene determinado por tres coordenadas
Vectores en el espacio Un sistema de coordenadas tridimensional se construye trazando un eje Z, perpendicular en el origen de coordenadas a los ejes X e Y. Cada punto viene determinado por tres coordenadas
Álgebra Lineal Ma1010
 Álgebra Lineal Ma1010 Mínimos Cuadrados Departamento de Matemáticas ITESM Mínimos Cuadrados Álgebra Lineal - p. 1/34 En esta sección veremos cómo se trabaja un sistema inconsistente. Esta situación es
Álgebra Lineal Ma1010 Mínimos Cuadrados Departamento de Matemáticas ITESM Mínimos Cuadrados Álgebra Lineal - p. 1/34 En esta sección veremos cómo se trabaja un sistema inconsistente. Esta situación es
Segundo de Bachillerato Geometría en el espacio
 Segundo de Bachillerato Geometría en el espacio Jesús García de Jalón de la Fuente IES Ramiro de Maeztu Madrid 204-205. Coordenadas de un vector En el conjunto de los vectores libres del espacio el concepto
Segundo de Bachillerato Geometría en el espacio Jesús García de Jalón de la Fuente IES Ramiro de Maeztu Madrid 204-205. Coordenadas de un vector En el conjunto de los vectores libres del espacio el concepto
CURSO CERO. Departamento de Matemáticas. Profesor: Raúl Martín Martín Sesiones 18 y 19 de Septiembre
 CURSO CERO Departamento de Matemáticas Profesor: Raúl Martín Martín Sesiones 18 y 19 de Septiembre Capítulo 1 La demostración matemática Demostración por inducción El razonamiento por inducción es una
CURSO CERO Departamento de Matemáticas Profesor: Raúl Martín Martín Sesiones 18 y 19 de Septiembre Capítulo 1 La demostración matemática Demostración por inducción El razonamiento por inducción es una
x : N Q 1 x(1) = x 1 2 x(2) = x 2 3 x(3) = x 3
 = x 1 2 x(2) = x 2 3 x(3) = x 3") 3 Sucesiones - Fernando Sánchez - - Cálculo I de números racionales 03 10 2015 Los números reales son aproximaciones que se van haciendo con números racionales. Estas aproximaciones se llaman sucesiones
3 Sucesiones - Fernando Sánchez - - Cálculo I de números racionales 03 10 2015 Los números reales son aproximaciones que se van haciendo con números racionales. Estas aproximaciones se llaman sucesiones
SUCESIONES INFINITAS
 SUCESIONES INFINITAS 1 2 Ejercicio: Cálculo del término general de una sucesión: Encontrar el quincuagésimo término de la sucesión 1, 3, 5, 7,... Es una progresión aritmética de diferencia 2. Su término
SUCESIONES INFINITAS 1 2 Ejercicio: Cálculo del término general de una sucesión: Encontrar el quincuagésimo término de la sucesión 1, 3, 5, 7,... Es una progresión aritmética de diferencia 2. Su término
1. ESPACIOS VECTORIALES
 1 1. ESPACIOS VECTORIALES 1.1. ESPACIOS VECTORIALES. SUBESPACIOS VECTORIALES Denición 1. (Espacio vectorial) Decimos que un conjunto no vacío V es un espacio vectorial sobre un cuerpo K, o K-espacio vectorial,
1 1. ESPACIOS VECTORIALES 1.1. ESPACIOS VECTORIALES. SUBESPACIOS VECTORIALES Denición 1. (Espacio vectorial) Decimos que un conjunto no vacío V es un espacio vectorial sobre un cuerpo K, o K-espacio vectorial,
1 v 1 v 2. = u 1v 1 + u 2 v 2 +... u n v n. v n. y v = u u = u 2 1 + u2 2 + + u2 n.
 Ortogonalidad Producto interior Longitud y ortogonalidad Definición Sean u y v vectores de R n Se define el producto escalar o producto interior) de u y v como u v = u T v = u, u,, u n ) Ejemplo Calcular
Ortogonalidad Producto interior Longitud y ortogonalidad Definición Sean u y v vectores de R n Se define el producto escalar o producto interior) de u y v como u v = u T v = u, u,, u n ) Ejemplo Calcular
Apuntes de Matemática Discreta 1. Conjuntos y Subconjuntos
 Apuntes de Matemática Discreta 1. Conjuntos y Subconjuntos Francisco José González Gutiérrez Cádiz, Octubre de 2004 Universidad de Cádiz Departamento de Matemáticas ii Lección 1 Conjuntos y Subconjuntos
Apuntes de Matemática Discreta 1. Conjuntos y Subconjuntos Francisco José González Gutiérrez Cádiz, Octubre de 2004 Universidad de Cádiz Departamento de Matemáticas ii Lección 1 Conjuntos y Subconjuntos
Objetivos: Al inalizar la unidad, el alumno:
 Unidad 7 transformaciones lineales Objetivos: Al inalizar la unidad, el alumno: Comprenderá los conceptos de dominio e imagen de una transformación. Distinguirá cuándo una transformación es lineal. Encontrará
Unidad 7 transformaciones lineales Objetivos: Al inalizar la unidad, el alumno: Comprenderá los conceptos de dominio e imagen de una transformación. Distinguirá cuándo una transformación es lineal. Encontrará
Factorización de polinomios
 Factorización de polinomios Polinomios Un polinomio p en la variable x es una expresión de la forma: px a 0 a 1 x a x a n1 x n1 a n x n donde a 0, a 1, a,, a n1, a n son unos números, llamados coeficientes
Factorización de polinomios Polinomios Un polinomio p en la variable x es una expresión de la forma: px a 0 a 1 x a x a n1 x n1 a n x n donde a 0, a 1, a,, a n1, a n son unos números, llamados coeficientes
Cambio de representaciones para variedades lineales.
 Cambio de representaciones para variedades lineales 18 de marzo de 2015 ALN IS 5 Una variedad lineal en R n admite dos tipos de representaciones: por un sistema de ecuaciones implícitas por una familia
Cambio de representaciones para variedades lineales 18 de marzo de 2015 ALN IS 5 Una variedad lineal en R n admite dos tipos de representaciones: por un sistema de ecuaciones implícitas por una familia
elemento neutro y elemento unidad: inversa aditiva (opuesto): para todo λ K 0, existe un único µ K tal que λµ = 1;
: para todo λ K 0, existe un único µ K tal que λµ = 1;") 3. Espacios Vectoriales 3.1. Definición de espacio vectorial Un cuerpo es una estructura algebraica (K, +, ) formada por un conjunto K no vacio y dos operaciones internas + y que verifican las siguientes
3. Espacios Vectoriales 3.1. Definición de espacio vectorial Un cuerpo es una estructura algebraica (K, +, ) formada por un conjunto K no vacio y dos operaciones internas + y que verifican las siguientes
TEMA 2 POLINOMIOS Y FRACCIONES ALGEBRAICAS
 Matemáticas B 4º E.S.O. Tema : Polinomios y fracciones algebraicas. 1 TEMA POLINOMIOS Y FRACCIONES ALGEBRAICAS.1 COCIENTE DE POLINOMIOS 4º.1.1 COCIENTE DE MONOMIOS 4º El cociente de un monomio entre otro
Matemáticas B 4º E.S.O. Tema : Polinomios y fracciones algebraicas. 1 TEMA POLINOMIOS Y FRACCIONES ALGEBRAICAS.1 COCIENTE DE POLINOMIOS 4º.1.1 COCIENTE DE MONOMIOS 4º El cociente de un monomio entre otro
OPERACIONES CON POLINOMIOS
 OPERACIONES CON POLINOMIOS. SUMA ALGEBRAICA DE POLINOMIOS. En la práctica para sumar dos o más polinomios suelen colocarse unos deajo de los otros, de tal modo que los términos semejantes queden en columna,
OPERACIONES CON POLINOMIOS. SUMA ALGEBRAICA DE POLINOMIOS. En la práctica para sumar dos o más polinomios suelen colocarse unos deajo de los otros, de tal modo que los términos semejantes queden en columna,
1. SOLUCIONES A LOS EJERCICIOS PROPUESTOS
 1 1. SOLUCIONES A LOS EJERCICIOS PROPUESTOS 1.1. ESPACIOS VECTORIALES 1. Analizar cuáles de los siguientes subconjuntos de R 3 son subespacios vectoriales. a) A = {(2x, x, 7x)/x R} El conjunto A es una
1 1. SOLUCIONES A LOS EJERCICIOS PROPUESTOS 1.1. ESPACIOS VECTORIALES 1. Analizar cuáles de los siguientes subconjuntos de R 3 son subespacios vectoriales. a) A = {(2x, x, 7x)/x R} El conjunto A es una