Diseño Mecánico (Engranajes) Juan Manuel Rodríguez Prieto Ing. M.Sc. Ph.D.
|
|
|
- Lucía López Parra
- hace 7 años
- Vistas:
Transcripción
1 Diseño Mecánico (Engranajes) Juan Manuel Rodríguez Prieto Ing. M.Sc. Ph.D.

2 Engranajes 1. Tipos de engranaje 2. Nomenclatura 3. Acción conjugada 4. Propiedades de la involuta 5. Fundamentos 6. Relación de contacto

3 Engranajes Los engranes rectos, tienen dientes paralelos al eje de rotación y se emplean para transmitir movimiento de un eje a otro eje paralelo.

4 Engranajes Los engranes helicoidales, poseen dientes inclinados con respecto al eje de rotación, y se utilizan para las mismas aplicaciones que los engranes rectos y, cuando se utilizan en esta forma, no son tan ruidosos, debido al engranado más gradual de los dientes durante el acoplamiento. Asimismo, el diente inclinado desarrolla cargas de empuje y pares de flexión que no están presentes en los engranes rectos. En ocasiones, los engranes helicoidales se usan para transmitir movimiento entre ejes no paralelos.

5 Engranajes

6 Engranajes Los engranes cónicos, que presentan dientes formados en superficies cónicas, se emplean sobre todo para transmitir movimiento entre ejes que se intersecan.

7 Engranajes Los engranes cónicos, que presentan dientes formados en superficies cónicas, se emplean sobre todo para transmitir movimiento entre ejes que se intersecan.

8 Engranajes El tornillo sinfín o de gusano, representa el cuarto tipo de engrane básico. Como se indica, el gusano se parece a un tornillo. El sentido de rotación del gusano, también llamado corona de tornillo sinfín, depende del sentido de rotación del tornillo sinfín y de que los dientes de gusano se hayan cortado a la derecha o a la izquierda. Los engranajes de tornillo sinfín también se hacen de manera que los dientes de uno o de ambos elementos se envuelvan de manera parcial alrededor del otro.

9 Nomenclatura El círculo de paso es un círculo teórico en el que por lo general se basan todos los cálculos; su diámetro es el diámetro de paso. Los círculos de paso de un par de engranes acoplados son tangentes entre sí. Un piñón es el menor de dos engranes acoplados; a menudo, el mayor se llama rueda. El paso circular p es la distancia, medida sobre el círculo de paso, desde un punto en un diente a un punto correspondiente en un diente adyacente. De esta manera, el paso circular es igual a la suma del espesor del diente y del ancho del espacio.

10 Nomenclatura El módulo m representa la relación del diámetro de paso con el número de dientes. La unidad de longitud que suele emplearse es el milímetro. El módulo señala el índice del tama- ño de los dientes en unidades SI. El paso diametral P está dado por la relación del número de dientes en el engrane res- pecto del diámetro de paso. Por lo tanto, es el recíproco del módulo. Debido a que el paso diametral se utiliza sólo con unidades del sistema inglés, se expresa en dientes por pulgada.

11 Nomenclatura La cabeza a se determina por la distancia radial entre la cresta y el círculo de paso. La raíz b equivale a la distancia radial desde el fondo hasta el círculo de paso. La altura, o profundidad total h, es la suma de la cabeza y la raíz. El círculo del claro es un círculo tangente al círculo de la raíz del engrane acoplado. El claro c está dado por la cantidad por la que la raíz en un engrane dado excede la cabeza de su engrane acoplado. El huelgo se determina mediante la cantidad por la cual el ancho del espacio de un diente excede el grosor o espesor del diente de acoplamiento medido en los círculos de paso.

12 Nomenclatura

13 Involuta El cilindro A, alrededor del cual se desenrolla una cuerda def que se mantiene tirante. El punto b en la cuerda representa un punto de trazo, y a medida que la cuerda se desenrolla respecto del cilindro, el punto b trazará la curva involuta ac. El radio de la curvatura de la involuta varía en forma continua, de cero en el punto a hasta un máximo en el punto c. En el punto b, el radio corresponde a la distancia be, puesto que b gira de manera instantánea respecto del punto e. Así pues, la recta generatriz de es normal a la involuta en todos los puntos de intersección y, al mismo tiempo, siempre es tangente al cilindro A. El círculo sobre el que se genera la involuta se llama círculo base.

14 Involuta En la figura se muestran dos discos para engranes con centros fijos en O1 y O2 con círculos de base cuyos radios respeckvos son O1a y O2b. Ahora imagínese que se arrolla una cuerda en el senkdo de las manecillas del reloj alrededor del círculo base del engrane 1, manteniéndose Krante entre los puntos a y b, y arrollada en el senkdo contrario a las manecillas del reloj alrededor del círculo base del engrane 2. Si ahora los círculos base se hacen girar en senkdos opuestos para mantener la cuerda Krante, un punto g en la cuerda trazará las involutas cd en el engrane 1 y ef en el engrane 2. De esta manera, las involutas se generan en forma simultánea por el punto de trazo. Por consiguiente, el punto de trazo representa el punto de contacto, en tanto que la porción de la cuerda ab es la recta generatriz. El punto de contacto se mueve a lo largo de la recta generatriz, la cual no cambia de posición, porque siempre está tangente a los círculos base; y debido a que la recta generatriz siempre es normal a las involutas en el punto de contacto, se saksface el requisito de movimiento uniforme.

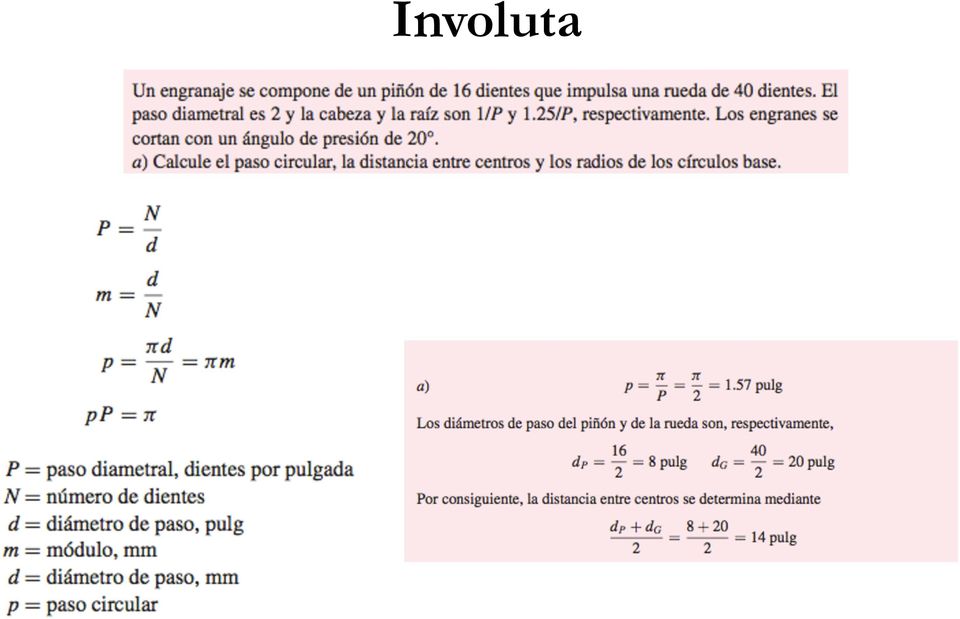
15 Involuta

16 Involuta
17 Involuta El radio del círculo base está determinado por donde r es el radio de paso.

18 Leer sección 13.5 Tarea

19 Trenes de engranajes La ecuación se aplica a cualquier engranaje, sin importar si los engranes son rectos, helicoidales, cónicos o de tornillo sinfín.

20 Trenes de engranajes n 2 N 2 = n 3 N 3 n 2 N 2 N 3 = n 3 n 3 N 3 = n 4 N 4 n 3 N 3 N 4 = n 4 n 4 N 5 = n 6 N 6 n 4 N 5 N 6 = n 6 n 2 N 2 N 4 = n 4 n 2 N 2 N 4 N 5 N 6 = n 6 La velocidad angular del engranaje 6 no depende de la velocidad angular del engranaje 3.

21 Trenes de engranajes e = N 2N 5 N 4 N 6 n L = en F n L es la velocidad del úlkmo engranaje, y n f la velocidad angular del primer engranaje
22 Trenes de engranajes e = N 2N 5 N 4 N 6 n L = en F n L es la velocidad del úlkmo engranaje, y n f la velocidad angular del primer engranaje
23 Trenes de engranajes se puede obtener un valor del tren de hasta 10 a 1 con un par de engranes (por razones de espacio)
24 Trenes de engranajes Tren de engranajes de 2 etapas
25 Trenes de engranajes Tren de engranajes de 2 etapas Se necesita que una caja de cambios proporcione un incremento de velocidad de 30:1 (±1%), a la vez que se minimice el tamaño total de la caja. Especifique los números de dientes apropiados. Debido a que la relación es mayor a 10:1 y menor a 100:1, se necesita un tren compuesto de dos etapas. Queremos un incremento de 30, esa incremento lo vamos a dividir en dos etapas. En cada etapa, vamos a incrementar la velocidad e = 30
26 Trenes de engranajes Tren de engranajes de 2 etapas Se necesita que una caja de cambios proporcione un incremento de velocidad de 30:1 (±1%), a la vez que se minimice el tamaño total de la caja. Especifique los números de dientes apropiados. e = 30 N s N e = e = 30 N s = 30N e Se supone un ángulo de presión típico de 20, el mínimo número de dientes para evitar interferencia es 16
27 Trenes de engranajes Tren de engranajes de 2 etapas Se necesita que una caja de cambios proporcione un incremento de velocidad de 30:1 (±1%), a la vez que se minimice el tamaño total de la caja. Especifique los números de dientes apropiados. Se supone un ángulo de presión típico de 20, el mínimo número de dientes para evitar interferencia es 16 N s = 30 *16 = 88 e = = se encuentra dentro de la tolerancia del 1%
28 Trenes de engranajes Tren de engranajes de 2 etapas Se necesita que una caja de cambios proporcione un incremento exacto de velocidad de 30:1, al tiempo que se minimice el tamaño total de la caja. Especifique los números de dientes apropiados. e = 30 = 6 *5 N 2 N 3 = 6 N 4 N 5 = 5 Selecciones N 3 y N 5 igual a 16, número mínimo de dientes para evitar interferencia
29 Trenes de engranajes Tren de engranajes de 2 etapas Se necesita que una caja de cambios proporcione un incremento exacto de velocidad de 30:1, al tiempo que se minimice el tamaño total de la caja. Especifique los números de dientes apropiados. Seleccionar N 3 y N 5 igual a 16, número mínimo de dientes para evitar interferencia N 2 = 6 *16 = 96 N 4 = 5 *16 = 80 e = = 30
30 Trenes de engranajes es deseable que el eje de entrada y el de salida de un tren de engranes compuesto de dos etapas estén en línea
31 Trenes de engranajes Se necesita que una caja de cambios proporcione un incremento exacto de velocidad de 30:1, al tiempo que se minimice el tamaño total de la caja. Los ejes de entrada y salida deben estar en línea. Especifique los números de dientes apropiados. N 2 N 3 = 6 N 4 N 5 = 5 N 2 + N 3 = N 4 + N 5 Seleccionamos N3=16 N 2 = 6 *16 = = N 4 + N 5 N 4 N 5 = 5
32 Trenes de engranajes Se necesita que una caja de cambios proporcione un incremento exacto de velocidad de 30:1, al tiempo que se minimice el tamaño total de la caja. Los ejes de entrada y salida deben estar en línea. Especifique los números de dientes apropiados. 112 = N 4 + N 5 N 4 N 5 = = 5N 5 + N 5 N 5 = 18.67
33 Trenes de engranajes Se necesita que una caja de cambios proporcione un incremento exacto de velocidad de 30:1, al tiempo que se minimice el tamaño total de la caja. Los ejes de entrada y salida deben estar en línea. Especifique los números de dientes apropiados. Incremento exacto de velocidad de 30 N 2 = 6N 3 N 4 N 5 = 5 N 2 + N 3 = N 4 + N 5 N 4 = 5N 5 6N 3 + N 3 = N 4 + N 5 N 5 = 7 6 N 3
34 Trenes de engranajes Se necesita que una caja de cambios proporcione un incremento exacto de velocidad de 30:1, al tiempo que se minimice el tamaño total de la caja. Los ejes de entrada y salida deben estar en línea. Especifique los números de dientes apropiados. Incremento exacto de velocidad de 30 N 2 = 6N 3 N 4 = 5N 5 N 5 = 7 6 N 3 Selecciones N3 de tal manera que N5 de un número entero. El N3 más pequeño que podemos seleccionar es 18. De donde: N3=18 N5=21 N2=108 N4=105
35 Análisis de fuerzas en engranajes Cuando dos o más engranajes están en contacto, existen entre ellos fuerzas de contacto que nos permiten transmitir el movimiento de un engranaje a otro. Debido a que el engranaje se encuentra soportado en un eje, el eje le realiza fuerzas y momento que le permite al sistema realizar el movimiento deseado.
36 Análisis de fuerzas en engranajes La fuerza en la dirección tangencial será la fuerza que se transmikrá de un eje a otro La fuerza en la dirección radial generará esfuerzos de flexión en el eje.
37 Análisis de fuerzas en engranajes Sistema ingles Sistema internacional
38 Análisis de fuerzas en engranajes El piñón 2 de la figura funciona a rpm y transmite 2.5 kw al engrane secundario libre 3. Los dientes se forman según el sistema de 20, de profundidad completa, con un módulo de m = 2.5 mm.
39 Análisis de fuerzas en engranajes El piñón 2 de la figura funciona a rpm y transmite 2.5 kw al engrane secundario libre 3. Los dientes se forman según el sistema de 20, de profundidad completa, con un módulo de m = 2.5 mm. Con la potencia y la velocidad angular calculamos la carga transmikda Los diámetros de paso de los engranajes los calculo a parkr del modulo y del número de dientes del engranaje
40 Análisis de fuerzas en engranajes El piñón 2 de la figura funciona a rpm y transmite 2.5 kw al engrane secundario libre 3. Los dientes se forman según el sistema de 20, de profundidad completa, con un módulo de m = 2.5 mm. La fuerza trasmikda por el piñon 2 al engranaje 3 en la dirección tangencial será igual a la carga transmikda La fuerza ejercida por el piñon 2 al engranaje 3 en la dirección radial, se calcula a parkr del ángulo de presión
41 Análisis de fuerzas en engranajes El piñón 2 de la figura funciona a rpm y transmite 2.5 kw al engrane secundario libre 3. Los dientes se forman según el sistema de 20, de profundidad completa, con un módulo de m = 2.5 mm. La fuerza ejercida por el engranaje 3 en el engranaje 4 en la dirección tangencial será igual a la fuerza ejercida por el engranaje 2 en el engranaje 3, debido a que el engranaje 3 no transmite potencia a sus eje.
42 Análisis de fuerzas en engranajes El piñón 2 de la figura funciona a rpm y transmite 2.5 kw al engrane secundario libre 3. Los dientes se forman según el sistema de 20, de profundidad completa, con un módulo de m = 2.5 mm. Con toda la información obtenida anteriormente se pueden determinar las fuerzas ejercidas por los engranajes a sus ejes que lo soportan.
43 Análisis de fuerzas en engranajes
44 Análisis de fuerzas en engranajes
45 Análisis de fuerzas en engranajes Cuál es la diferencia en términos de fuerzas de contacto entre los engranajes rectos vs. los engranajes helicoidales o los cónicos?
TEORÍA DE MECANISMOS Y MÁQUINAS. EJERCICIOS DE ENGRANAJES.
 1. Realice un boceto de cada uno de los elementos siguientes: a. Engranaje helicoidal paralelo, con ángulo de hélice de 30º y relación e = 1/3. b. Engranaje de tornillo sinfín, con ángulo de hélice de
1. Realice un boceto de cada uno de los elementos siguientes: a. Engranaje helicoidal paralelo, con ángulo de hélice de 30º y relación e = 1/3. b. Engranaje de tornillo sinfín, con ángulo de hélice de
3º ESO TECNOLOGIAS MECANISMOS
 3º ESO TECNOLOGIAS MECANISMOS TEORIA DE MECANISMOS SIMPLES CON PALANCAS... 1 EJERCICIOS DE PALANCAS...3 TEORIA DE MECANISMOS DE TRANSMISIÓN LINEAL...6 TEORIA DE MECANISMOS DE TRANSMISIÓN CIRCULAR...6 TEORIA
3º ESO TECNOLOGIAS MECANISMOS TEORIA DE MECANISMOS SIMPLES CON PALANCAS... 1 EJERCICIOS DE PALANCAS...3 TEORIA DE MECANISMOS DE TRANSMISIÓN LINEAL...6 TEORIA DE MECANISMOS DE TRANSMISIÓN CIRCULAR...6 TEORIA
VII. Engranes en general
 Objetivos: 1. Definir que es un engrane. 2. Mencionar los tipos de engrane. 3. Ver la nomenclatura de los engranes rectos. 4. Discutir algunos fundamentos teóricos relacionados a los engranes rectos. 5.
Objetivos: 1. Definir que es un engrane. 2. Mencionar los tipos de engrane. 3. Ver la nomenclatura de los engranes rectos. 4. Discutir algunos fundamentos teóricos relacionados a los engranes rectos. 5.
5. ENGRANAJES CILÍNDRICOS RECTOS
 5. ENGRANAJES CILÍNDRICOS RECTOS 5.1. Introducción El objetivo de los engranajes es transmitir rotaciones entre ejes con una relación de velocidades angulares constante. Este objetivo se puede lograr también
5. ENGRANAJES CILÍNDRICOS RECTOS 5.1. Introducción El objetivo de los engranajes es transmitir rotaciones entre ejes con una relación de velocidades angulares constante. Este objetivo se puede lograr también
Escuela Universitaria de Ingeniería Técnica Aeronáutica Expresión Gráfica en la Ingeniería INGENIERÍA GRÁFICA
 Escuela Universitaria de Ingeniería Técnica Aeronáutica Expresión Gráfica en la Ingeniería INGENIERÍA GRÁFICA 4. DISEÑO TÉCNICO. 4.1 Diseño mecánico. 4.1.1 Definición y representación de Ejes y Árboles.
Escuela Universitaria de Ingeniería Técnica Aeronáutica Expresión Gráfica en la Ingeniería INGENIERÍA GRÁFICA 4. DISEÑO TÉCNICO. 4.1 Diseño mecánico. 4.1.1 Definición y representación de Ejes y Árboles.
ACTIVIDADES DE MECANISMOS
 ACTIVIDADES DE MECANISMOS 1. Calcular la velocidad de giro de una polea de 40mm de diámetro si el arrastrada por otra de 120mm de diámetro, que gira a 300 rpm. Calcula también la relación de transmisión
ACTIVIDADES DE MECANISMOS 1. Calcular la velocidad de giro de una polea de 40mm de diámetro si el arrastrada por otra de 120mm de diámetro, que gira a 300 rpm. Calcula también la relación de transmisión
Análisis de Mecanismos. Unidad 4. Engranes y Trenes de Engranes
 Análisis de Mecanismos Unidad 4. Engranes y Trenes de Engranes Introducción Los engranes se estudian porque la transmisión del movimiento rotatorio de un eje a otro se presenta prácticamente en todas las
Análisis de Mecanismos Unidad 4. Engranes y Trenes de Engranes Introducción Los engranes se estudian porque la transmisión del movimiento rotatorio de un eje a otro se presenta prácticamente en todas las
10.14 ENGRANAJES PARA EJES ALABEADOS:
 0.4 ENGRANAJES PARA EJES ALABEADOS: Nos referimos a ruedas dentadas que transmiten movimiento entre ejes que ni se cortan ni son paralelos, (se denominan ejes alabeados), la posición de estos ejes es invariable,
0.4 ENGRANAJES PARA EJES ALABEADOS: Nos referimos a ruedas dentadas que transmiten movimiento entre ejes que ni se cortan ni son paralelos, (se denominan ejes alabeados), la posición de estos ejes es invariable,
Un mecanismo nos ayuda a realizar un trabajo, modificando la forma o entidad de la fuerza que realizamos.
 Los seres humanos buscamos siempre la forma de facilitar nuestro trabajo y para ayudarnos desarrollamos la tecnología, la cual no siempre es electrónica o eléctrica, hay muchos elementos mecánicos que
Los seres humanos buscamos siempre la forma de facilitar nuestro trabajo y para ayudarnos desarrollamos la tecnología, la cual no siempre es electrónica o eléctrica, hay muchos elementos mecánicos que
Examen de TECNOLOGIA DE MAQUINAS Septiembre 97 Nombre...
 Examen de TECNOLOGIA DE MAQUINAS Septiembre 97 Nombre... El eje de la figura recibe la potencia procedente del motor a través del engranaje cilíndrico recto que lleva montado, y se acopla a la carga por
Examen de TECNOLOGIA DE MAQUINAS Septiembre 97 Nombre... El eje de la figura recibe la potencia procedente del motor a través del engranaje cilíndrico recto que lleva montado, y se acopla a la carga por
APUNTES DE MECANISMOS E.S.O.
 APUNTES DE MECANISMOS E.S.O. DEPARTAMENTO DE TECNOLOGÍA 1 INTRODUCCIÓN MECANISMOS Si observamos a nuestro alrededor, observaremos que estamos rodeados de objetos que se mueven o tienen capacidad de movimiento.
APUNTES DE MECANISMOS E.S.O. DEPARTAMENTO DE TECNOLOGÍA 1 INTRODUCCIÓN MECANISMOS Si observamos a nuestro alrededor, observaremos que estamos rodeados de objetos que se mueven o tienen capacidad de movimiento.
Muelles y resortes. Índice. Tema 8º: Tema DI8 - Muelles y resortes. Ingeniería Gráfica y Topografía. Expresión Gráfica y DAO 1
 Tema 8º: Muelles y resortes Ingeniería Gráfica y Topografía M.D.M.G./11 Índice - Generalidades. - Clasificación. - Resortes helicoidales de compresión. - Resortes helicoidales de tracción. - Resortes cónicos
Tema 8º: Muelles y resortes Ingeniería Gráfica y Topografía M.D.M.G./11 Índice - Generalidades. - Clasificación. - Resortes helicoidales de compresión. - Resortes helicoidales de tracción. - Resortes cónicos
Z 1 = 8 Z 2 = 16 W 1 Z 1 = W 2 Z 2
 7- SISTEMAS DE ENGRANAJES Para que dos ruedas dentadas engranen entre sí, el tamaño de los dientes de cada una deben ser iguales. Z 1 = 8 Z 2 = 16 El número de dientes de un engranaje se representa por
7- SISTEMAS DE ENGRANAJES Para que dos ruedas dentadas engranen entre sí, el tamaño de los dientes de cada una deben ser iguales. Z 1 = 8 Z 2 = 16 El número de dientes de un engranaje se representa por
TECNOLOGÍAS Versión impresa MÁQUINAS: TRANSMISIÓN Y TRANS- FORMACIÓN DEL MOVIMIENTO
 TECNOLOGÍAS Versión impresa MÁQUINAS: TRANSMISIÓN Y TRANS- FORMACIÓN DEL MOVIMIENTO Introducción Una máquina es un aparato capaz de transformar energía en trabajo útil. Desde la escoba hasta la lavadora,
TECNOLOGÍAS Versión impresa MÁQUINAS: TRANSMISIÓN Y TRANS- FORMACIÓN DEL MOVIMIENTO Introducción Una máquina es un aparato capaz de transformar energía en trabajo útil. Desde la escoba hasta la lavadora,
Engranaje Conducido. Se logra hacer girar un engranaje conducido en el mismo sentido que el motor añadiendo otro, denominado loco, entre ellos.
 Son ruedas dentadas que se acoplan entre semejante para transmitir eficientemente movimiento y fuerza. En la combinación de dos engranajes se denominan motor al que aporta la fuerza de entrada, proveniente
Son ruedas dentadas que se acoplan entre semejante para transmitir eficientemente movimiento y fuerza. En la combinación de dos engranajes se denominan motor al que aporta la fuerza de entrada, proveniente
CIDEAD. TECNOLOGÍA INDUSTRIAL I. MECANISMOS. PROBLEMAS 1.
 1. Hallar la fuerza que es necesario aplicar para vencer una resistencia de 1000 Kg., utilizando: a. Una polea móvil. b. Un polipasto potencial de tres poleas móviles. c. Un polipasto exponencial de tres
1. Hallar la fuerza que es necesario aplicar para vencer una resistencia de 1000 Kg., utilizando: a. Una polea móvil. b. Un polipasto potencial de tres poleas móviles. c. Un polipasto exponencial de tres
TEMA 4: MECANISMOS. 2º E.S.O. I.E.S. "San Isidro" Talavera --Dpto. de Tecnología--
 TEMA 4: MECANISMOS. 2º E.S.O. 1 ÍNDICE: 0.- INTRODUCCIÓN. 1.- TIPOS DE MOVIMIENTO. 2.- CONCEPTOS BÁSICOS SOBRE EL ESTUDIO DE LAS MÁQUINAS. 3.- CLASIFICACIÓN DE LOS MECANISMOS. 4.- MECANISMOS DE TRANSMISIÓN
TEMA 4: MECANISMOS. 2º E.S.O. 1 ÍNDICE: 0.- INTRODUCCIÓN. 1.- TIPOS DE MOVIMIENTO. 2.- CONCEPTOS BÁSICOS SOBRE EL ESTUDIO DE LAS MÁQUINAS. 3.- CLASIFICACIÓN DE LOS MECANISMOS. 4.- MECANISMOS DE TRANSMISIÓN
PROBLEMAS DE ELASTICIDAD Y RESISTENCIA DE MATERIALES GRUPO 4 CURSO 1999-2000
 PROBLEMAS DE ELASTICIDAD Y RESISTENCIA DE MATERIALES GRUPO 4 CURSO 1999-2000 10.1.- Qué longitud debe tener un redondo de hierro (G = 80.000 MPa), de 1 cm de diámetro para que pueda sufrir un ángulo de
PROBLEMAS DE ELASTICIDAD Y RESISTENCIA DE MATERIALES GRUPO 4 CURSO 1999-2000 10.1.- Qué longitud debe tener un redondo de hierro (G = 80.000 MPa), de 1 cm de diámetro para que pueda sufrir un ángulo de
La velocidad a la que una máquina realiza un trabajo (trabajo dividido por tiempo). Ver también Trabajo.
. Ver también Trabajo.") A Aceleración Es la rapidez con la que aumenta la velocidad. Si un vehículo está acelerando, se mueve más rápido. Alimentación Articulaciones La velocidad a la que una máquina realiza un trabajo (trabajo
A Aceleración Es la rapidez con la que aumenta la velocidad. Si un vehículo está acelerando, se mueve más rápido. Alimentación Articulaciones La velocidad a la que una máquina realiza un trabajo (trabajo
Pero no debemos olvidar que también hay objetos que giran con movimiento circular variado, ya sea acelerado o decelerado.
 Movimiento Circular. Se define como movimiento circular aquél cuya trayectoria es una circunferencia. El movimiento circular, llamado también curvilíneo, es otro tipo de movimiento sencillo. Estamos rodeados
Movimiento Circular. Se define como movimiento circular aquél cuya trayectoria es una circunferencia. El movimiento circular, llamado también curvilíneo, es otro tipo de movimiento sencillo. Estamos rodeados
engranaje ruedas dentadas corona piñón
 Se denomina engranaje o ruedas dentadas al mecanismo utilizado para transmitir potencia mecánica entre las distintas partes de una máquina. Los engranajes están formados por dos ruedas dentadas, de las
Se denomina engranaje o ruedas dentadas al mecanismo utilizado para transmitir potencia mecánica entre las distintas partes de una máquina. Los engranajes están formados por dos ruedas dentadas, de las
Diseño Mecánico (Tornillos) Juan Manuel Rodríguez Prieto Ing. M.Sc. Ph.D.
 Juan Manuel Rodríguez Prieto Ing. M.Sc. Ph.D.") Diseño Mecánico (Tornillos) Juan Manuel Rodríguez Prieto Ing. M.Sc. Ph.D. Tornillos 1. Normas y definiciones de roscas Mecánica de los tornillos de potencia Sujetadores roscados 2. Uniones: rigidez del
Diseño Mecánico (Tornillos) Juan Manuel Rodríguez Prieto Ing. M.Sc. Ph.D. Tornillos 1. Normas y definiciones de roscas Mecánica de los tornillos de potencia Sujetadores roscados 2. Uniones: rigidez del
ECUACIÓN GENERAL DE SEGUNDO GRADO
 ECUACIÓN GENERAL DE SEGUNDO GRADO CONTENIDO 1. Definición de cónica y cono de revolución. Determinación de las cónicas por medio de sus coeficientes.1 Determinación del tipo de curva considerando los coeficientes
ECUACIÓN GENERAL DE SEGUNDO GRADO CONTENIDO 1. Definición de cónica y cono de revolución. Determinación de las cónicas por medio de sus coeficientes.1 Determinación del tipo de curva considerando los coeficientes
Examen de MECANISMOS Junio 97 Nombre...
 Examen de MECANISMOS Junio 97 Nombre... Se pretende conectar dos ejes paralelos que distan 505 mm mediante dos engranajes, de manera que la relación de velocidades sea 0.0625. El número máximo de dientes
Examen de MECANISMOS Junio 97 Nombre... Se pretende conectar dos ejes paralelos que distan 505 mm mediante dos engranajes, de manera que la relación de velocidades sea 0.0625. El número máximo de dientes
EJERCICIOS RECUPERACIÓN TECNOLOGÍA INDUSTRIAL I- 2ª PARTE MECANISMOS
 EJERCICIOS RECUPERACIÓN TECNOLOGÍA INDUSTRIAL I- 2ª PARTE MECANISMOS MECANISMOS DE TRANSMISIÓN Y TRANSFORMACIÓN DEL MOVIMIENTO 1.Una polea de 50 mm de diámetro acoplada al árbol motor gira a 1500 rpm.
EJERCICIOS RECUPERACIÓN TECNOLOGÍA INDUSTRIAL I- 2ª PARTE MECANISMOS MECANISMOS DE TRANSMISIÓN Y TRANSFORMACIÓN DEL MOVIMIENTO 1.Una polea de 50 mm de diámetro acoplada al árbol motor gira a 1500 rpm.
UNIVERSIDAD TECNOLÓGICA NACIONAL-
 UNIVERSIDAD TECNOLÓGICA NACIONAL- Facultad Regional Bahía Blanca CÁTEDRA: ELEMENTOS DE MAQUINA Trabajo Práctico N 14 Unidad: Análisis de Elementos de Transmisión (Capítulos 8 y 9). Tema: Cálculo de engranajes,
UNIVERSIDAD TECNOLÓGICA NACIONAL- Facultad Regional Bahía Blanca CÁTEDRA: ELEMENTOS DE MAQUINA Trabajo Práctico N 14 Unidad: Análisis de Elementos de Transmisión (Capítulos 8 y 9). Tema: Cálculo de engranajes,
V. Engranes en general
 Objetivos: 1. Definir que es un engrane. 2. Mencionar los tipos de engrane. 3. Ver la nomenclatura de los engranes rectos. 4. Discutir algunos fundamentos teóricos relacionados a los engranes rectos. 5.
Objetivos: 1. Definir que es un engrane. 2. Mencionar los tipos de engrane. 3. Ver la nomenclatura de los engranes rectos. 4. Discutir algunos fundamentos teóricos relacionados a los engranes rectos. 5.
MECÁNICA II CURSO 2004/05
 1.1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
1.1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
Elementos de transmisión: Engranajes
 Elementos de transmisión: Engranajes Principio de funcionamiento Tipos de engranajes Dimensiones características Formulas básicas Relaciones de transmisión Aplicaciones Rendimientos Trenes de engranajes
Elementos de transmisión: Engranajes Principio de funcionamiento Tipos de engranajes Dimensiones características Formulas básicas Relaciones de transmisión Aplicaciones Rendimientos Trenes de engranajes
Jmáx = Dmáx(a) Dmín(e) Jmín = Dmín(a) Dmáx(e) Amáx = Dmín(a) Dmáx(e)
 Dmín(e) Jmín = Dmín(a) Dmáx(e) Amáx = Dmín(a) Dmáx(e)") SISTEMAS de AJUSTES y TOLERANCIAS Conceptos Fundamentales En la actualidad, las crecientes necesidades de intercambiabilidad y producción de grandes volúmenes imponen un análisis cuidadoso para lograr
SISTEMAS de AJUSTES y TOLERANCIAS Conceptos Fundamentales En la actualidad, las crecientes necesidades de intercambiabilidad y producción de grandes volúmenes imponen un análisis cuidadoso para lograr
Figura 3.-(a) Movimiento curvilíneo. (b) Concepto de radio de curvatura
 Movimiento curvilíneo. (b) Concepto de radio de curvatura") Componentes intrínsecas de la aceleración: Componentes tangencial y normal Alfonso Calera Departamento de Física Aplicada. ETSIA. Albacete. UCLM En muchas ocasiones el análisis del movimiento es más sencillo
Componentes intrínsecas de la aceleración: Componentes tangencial y normal Alfonso Calera Departamento de Física Aplicada. ETSIA. Albacete. UCLM En muchas ocasiones el análisis del movimiento es más sencillo
SAN JUAN DE AZNALFARACHE (SEVILLA) PROBLEMAS DE MECANISMOS
 PROBLEMAS DE MECANISMOS") IES MTEO LEMÁN SN JUN DE ZNLFRCHE (SEVILL) PROBLEMS DE MECNISMOS º ESO MOTOR D 4 5 6 7 B C P PEDRO J. CSTEL GIL-TORESNO DEPRTMENTO DE TECNOLOGÍ PROBLEMS DE MECNISMOS Calcula la fuerza F y el desplazamiento
IES MTEO LEMÁN SN JUN DE ZNLFRCHE (SEVILL) PROBLEMS DE MECNISMOS º ESO MOTOR D 4 5 6 7 B C P PEDRO J. CSTEL GIL-TORESNO DEPRTMENTO DE TECNOLOGÍ PROBLEMS DE MECNISMOS Calcula la fuerza F y el desplazamiento
EJERCICIOS TECNOLOGÍA INDUSTRIAL I EJERCICIO 1
 EJERCICIOS TECNOLOGÍA INDUSTRIAL I EJERCICIO 1 EJERCICIO 2 En el siguiente circuito calcular: 1. La intensidad de corriente total 2. La intensidad que circula por cada rama 3. La energía disipada por la
EJERCICIOS TECNOLOGÍA INDUSTRIAL I EJERCICIO 1 EJERCICIO 2 En el siguiente circuito calcular: 1. La intensidad de corriente total 2. La intensidad que circula por cada rama 3. La energía disipada por la
5. APLICACIONES DE LAS LEYES DE NEWTON
 5. APLICACIONES DE LAS LEYES DE NEWTON En este capítulo extenderemos las leyes de Newton al estudio del movimiento en trayectorias curvas e incluiremos los efectos cuantitativos del rozamiento Rozamiento
5. APLICACIONES DE LAS LEYES DE NEWTON En este capítulo extenderemos las leyes de Newton al estudio del movimiento en trayectorias curvas e incluiremos los efectos cuantitativos del rozamiento Rozamiento
Diseño de una transmisión mecánica continuamente variable Pág. 45. ANEXO D: Cálculos
 Diseño de una transmisión mecánica continuamente variable Pág. 45 ANEXO D: Cálculos Pág. 46 Diseño de una transmisión mecánica continuamente variable Diseño de una transmisión mecánica continuamente variable
Diseño de una transmisión mecánica continuamente variable Pág. 45 ANEXO D: Cálculos Pág. 46 Diseño de una transmisión mecánica continuamente variable Diseño de una transmisión mecánica continuamente variable
Es un conjunto de ruedas dentadas que sirve para transmitir un movimiento circular entre dos ejes.
 QUÉ ES UN ENGRANAJE? Es un conjunto de ruedas dentadas que sirve para transmitir un movimiento circular entre dos ejes. Ruedas normalmente metálicas atravesadas por un eje En su periferia presenta unos
QUÉ ES UN ENGRANAJE? Es un conjunto de ruedas dentadas que sirve para transmitir un movimiento circular entre dos ejes. Ruedas normalmente metálicas atravesadas por un eje En su periferia presenta unos
TRANSMISIÓN DE POTENCIA POR BANDAS
 TRANSMISIÓN DE POTENCIA POR BANDAS Las transmisiones por correa, en su forma más sencilla, consta de una cinta colocada con tensión en dos poleas: una motriz y otra movida. Al moverse la cinta (correa)
TRANSMISIÓN DE POTENCIA POR BANDAS Las transmisiones por correa, en su forma más sencilla, consta de una cinta colocada con tensión en dos poleas: una motriz y otra movida. Al moverse la cinta (correa)
1. El eje de un motor gira a 500rpm. a que velocidad angular equivale en rad/s?
 1. El eje de un motor gira a 500rpm. a que velocidad angular equivale en rad/s? 2. Determina la relación de transmisión entre dos árboles y la velocidad del segundo si están unidos mediante una transmisión
1. El eje de un motor gira a 500rpm. a que velocidad angular equivale en rad/s? 2. Determina la relación de transmisión entre dos árboles y la velocidad del segundo si están unidos mediante una transmisión
Capitulo VI. VI.2 Engranajes cilíndricos. Universidad de Cantabria Departamento de Ing. Estructural y Mecánica
 Capitulo VI VI. Engranajes cilíndricos Capítulo VI Engranajes VI. Introducción n a los engranajes. VI. Engranajes cilíndricos. Engranajes con perfil de evolvente. Espesor del diente. Relación de contacto.
Capitulo VI VI. Engranajes cilíndricos Capítulo VI Engranajes VI. Introducción n a los engranajes. VI. Engranajes cilíndricos. Engranajes con perfil de evolvente. Espesor del diente. Relación de contacto.
MECÁNICA II CURSO 2006/07
 1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
ESCUELA TÉCNICA SUPERIOR DE INGENIEROS AERONÁUTICOS. Examen: Mecánica I (Probl. de Cinemática) Curso: 08/09 Fecha: 14.11.2008
 Curso: 08/09 Fecha: 14.11.2008") ESCUELA TÉCNICA SUPERIOR DE INGENIEROS AERONÁUTICOS APELLIDOS, NOMBRE: n o Examen: Mecánica I (Probl. de Cinemática) Curso: 08/09 Fecha: 14.11.008 Sea Oxyz un sistema de referencia ligado a un sólido S
ESCUELA TÉCNICA SUPERIOR DE INGENIEROS AERONÁUTICOS APELLIDOS, NOMBRE: n o Examen: Mecánica I (Probl. de Cinemática) Curso: 08/09 Fecha: 14.11.008 Sea Oxyz un sistema de referencia ligado a un sólido S
Momento de un vector deslizante respecto a un punto. Momento de un vector deslizante respecto a un eje
 Magnitudes escalares y vectoriales Tipos de vectores Operaciones con vectores libres Momento de un vector deslizante respecto a un punto Momento de un vector deslizante respecto a un eje Magnitudes escalares
Magnitudes escalares y vectoriales Tipos de vectores Operaciones con vectores libres Momento de un vector deslizante respecto a un punto Momento de un vector deslizante respecto a un eje Magnitudes escalares
Características de fabricación y principios de funcionamiento.
 COJINETES Características de fabricación y principios de funcionamiento. Como se ha visto en los capítulos anteriores, los motores de reacción, están compuestos por una serie de piezas giratorias y de
COJINETES Características de fabricación y principios de funcionamiento. Como se ha visto en los capítulos anteriores, los motores de reacción, están compuestos por una serie de piezas giratorias y de
d a =d+2h a d f =d-2h f NUMERO DE DIENTES (z): es el número de dientes de la rueda.
: es el número de dientes de la rueda.") RUEDA DENTADA CILINDRICA CON DENTADO RECTO Es una rueda dentada cuya superficie exterior es cilíndrica, siendo las generatrices de las superficies laterales de los dientes (flancos) paralelas al eje de
RUEDA DENTADA CILINDRICA CON DENTADO RECTO Es una rueda dentada cuya superficie exterior es cilíndrica, siendo las generatrices de las superficies laterales de los dientes (flancos) paralelas al eje de
UNIDAD DE MECANISMOS
 UNIDAD DE MECANISMOS 1.- MÁQUINAS Hay muchas maneras de definir qué es una máquina. Una definición muy general podría ser la siguiente: una máquina es cualquier instrumento, aparato o dispositivo que,
UNIDAD DE MECANISMOS 1.- MÁQUINAS Hay muchas maneras de definir qué es una máquina. Una definición muy general podría ser la siguiente: una máquina es cualquier instrumento, aparato o dispositivo que,
APUNTES DE TECNOLOGÍA 1ºESO MECANISMOS
 APUNTES DE TECNOLOGÍA 1ºESO MECANISMOS 1. INTRODUCCIÓN MECANISMO: Son elementos destinados a transmitir y/o transformar fuerzas y/o movimientos desde un elemento motriz (motor) a un elemento conducido
APUNTES DE TECNOLOGÍA 1ºESO MECANISMOS 1. INTRODUCCIÓN MECANISMO: Son elementos destinados a transmitir y/o transformar fuerzas y/o movimientos desde un elemento motriz (motor) a un elemento conducido
Bicicleta con pedales de movimiento rectilíneo
 Bicicleta con pedales de movimiento rectilíneo I. Zabalza, J. Ros, J.J. Gil, J.M. Pintor, y J.M. Jiménez Departamento de Ingeniería Mecánica, Energética y de Materiales Universidad Pública de Navarra,
Bicicleta con pedales de movimiento rectilíneo I. Zabalza, J. Ros, J.J. Gil, J.M. Pintor, y J.M. Jiménez Departamento de Ingeniería Mecánica, Energética y de Materiales Universidad Pública de Navarra,
PUNTOS Y VECTORES EN EL PLANO
 PUNTOS Y VECTORES EN EL PLANO PUNTOS EN EL PLANO Tomando como referencia los ejes cartesianos del plano, un punto se representa mediante un par ordenado (a, b) de números reales, es decir, mediante un
PUNTOS Y VECTORES EN EL PLANO PUNTOS EN EL PLANO Tomando como referencia los ejes cartesianos del plano, un punto se representa mediante un par ordenado (a, b) de números reales, es decir, mediante un
CAPITULO V CÁLCULOS MECÁNICOS. Se debe diseñar un eje que transmite una velocidad de giro máxima de 1725 rpm y
 33 CAPITULO V CÁLCULOS MECÁNICOS 5.1 Cálculos mecánicos de diseño para la flecha Se debe diseñar un eje que transmite una velocidad de giro máxima de 175 rpm y esta conectada a un motor de _ HP marca MERCADAL
33 CAPITULO V CÁLCULOS MECÁNICOS 5.1 Cálculos mecánicos de diseño para la flecha Se debe diseñar un eje que transmite una velocidad de giro máxima de 175 rpm y esta conectada a un motor de _ HP marca MERCADAL
INFORME: SELECCIÓN DE ENGRRANAJES
 INFORME: SELECCIÓN DE ENGRRANAJES AUTOR: Francisco Andrés Candelas Herías Gonzalo Lorenzo Lledó Carlos Alberto Jara Bravo Grupo de Automática, Robótica y Visión Artificial Departamento de Física, Ingeniería
INFORME: SELECCIÓN DE ENGRRANAJES AUTOR: Francisco Andrés Candelas Herías Gonzalo Lorenzo Lledó Carlos Alberto Jara Bravo Grupo de Automática, Robótica y Visión Artificial Departamento de Física, Ingeniería
CAPÍTULO 1. I TRODUCCIÓ A LOS ACCIO AMIE TOS DE MÁQUI AS
 OBJETIVOS ESPECÍFICOS 1 U IVERSIDAD TEC OLÓGICA DE PEREIRA FACULTAD DE I GE IERÍA MECÁ ICA OBJETIVOS ESPECÍFICOS - DISEÑO II Profesor: Libardo Vanegas Useche 5 de agosto de 2009 CAPÍTULO 1. I TRODUCCIÓ
OBJETIVOS ESPECÍFICOS 1 U IVERSIDAD TEC OLÓGICA DE PEREIRA FACULTAD DE I GE IERÍA MECÁ ICA OBJETIVOS ESPECÍFICOS - DISEÑO II Profesor: Libardo Vanegas Useche 5 de agosto de 2009 CAPÍTULO 1. I TRODUCCIÓ
E N G R A N A J E S INTRODUCCION
 E N G R A N A J E S INTRODUCCION Un engranaje es un mecanismo de transmisión, es decir, se utiliza para transmitir el movimiento de rotación entre dos árboles. Está formado por dos ruedas dentadas que
E N G R A N A J E S INTRODUCCION Un engranaje es un mecanismo de transmisión, es decir, se utiliza para transmitir el movimiento de rotación entre dos árboles. Está formado por dos ruedas dentadas que
Procesos de Fabricación II. Guía 10 1 PROCESOS DE FABRICACIÓN II
 Procesos de Fabricación II. Guía 10 1 PROCESOS DE FABRICACIÓN II Tema: USO DEL PLATO DIVISOR Procesos de Fabricación II. Guía 10 1 Contenidos Empleo del divisor Objetivos Objetivo General: Maquinar una
Procesos de Fabricación II. Guía 10 1 PROCESOS DE FABRICACIÓN II Tema: USO DEL PLATO DIVISOR Procesos de Fabricación II. Guía 10 1 Contenidos Empleo del divisor Objetivos Objetivo General: Maquinar una
Los cuerpos geométricos
 Los cuerpos geométricos Se denominan cuerpos geométricos a aquellos elementos que, ya sean reales o ideales que existen en la realidad o pueden concebirse mentalmente ocupan un volumen en el espacio desarrollándose
Los cuerpos geométricos Se denominan cuerpos geométricos a aquellos elementos que, ya sean reales o ideales que existen en la realidad o pueden concebirse mentalmente ocupan un volumen en el espacio desarrollándose
1.- Punto: Intersección de dos rectas. No tiene dimensiones (ni largo, ni ancho, ni alto).
.") 1.- Punto: Intersección de dos rectas. No tiene dimensiones (ni largo, ni ancho, ni alto). 6.- Espacio: Conjunto de puntos con tres dimensiones: largo, ancho y alto. Es infinito, sin límites. 2.- Recta:
1.- Punto: Intersección de dos rectas. No tiene dimensiones (ni largo, ni ancho, ni alto). 6.- Espacio: Conjunto de puntos con tres dimensiones: largo, ancho y alto. Es infinito, sin límites. 2.- Recta:
U.T. 4: Máquinas y Mecanismos (2ºESO)
") U.T. 4: Máquinas y Mecanismos (2ºESO) Nombre Apellidos Curso 1. Calcular el peso de un objeto en la superficie terrestre de: a) 40 Kg b) 50 Kg c) 100 g d) 0,6 g 2. Calcular la masa de un objeto cuyo peso
U.T. 4: Máquinas y Mecanismos (2ºESO) Nombre Apellidos Curso 1. Calcular el peso de un objeto en la superficie terrestre de: a) 40 Kg b) 50 Kg c) 100 g d) 0,6 g 2. Calcular la masa de un objeto cuyo peso
Sistemas Mecánicos II Unidad 1
 Sistemas Mecánicos II Unidad 1 El propósito de un rodamiento es el de proporcionar una posición relativa y libertad de rotación, además de transmitir una carga entre dos estructuras. Clasificación Rodamientos
Sistemas Mecánicos II Unidad 1 El propósito de un rodamiento es el de proporcionar una posición relativa y libertad de rotación, además de transmitir una carga entre dos estructuras. Clasificación Rodamientos
SUBRAYE LA RESPUESTA CORRECTA EN CADA PREGUNTA.
 CUADERNILLO DE GEOMETRIA I.- SUBRAYE LA RESPUESTA CORRECTA EN CADA PREGUNTA. 1.- SON LOS TRIÁNGULOS QUE TIENEN TODOS LOS ÁNGULOS IGUALES. A) EQUILÁTERO B) ACUTÁNGULO C) ISÓSCELES D) ESCALENO E) RECTÁNGULO
CUADERNILLO DE GEOMETRIA I.- SUBRAYE LA RESPUESTA CORRECTA EN CADA PREGUNTA. 1.- SON LOS TRIÁNGULOS QUE TIENEN TODOS LOS ÁNGULOS IGUALES. A) EQUILÁTERO B) ACUTÁNGULO C) ISÓSCELES D) ESCALENO E) RECTÁNGULO
Roscas de Filtros Spin-on: Cortadas o Roladas
 Boletín de Servicio Técnico 94-3R Roscas de Filtros Spin-on: Cortadas o Roladas El filtro Spin-on (sellado o roscado en Español) ha sido el diseño más popular y ampliamente aplicado para la filtración
Boletín de Servicio Técnico 94-3R Roscas de Filtros Spin-on: Cortadas o Roladas El filtro Spin-on (sellado o roscado en Español) ha sido el diseño más popular y ampliamente aplicado para la filtración
Programación de Máquinas a Control Numérico
 Programación de Máquinas a Control Numérico Maquina a Control Numérico moderna Interior Estructuras Principales Plato Carros Longitudinal y Transversal Torreta Portaherramientas Portaherramientas Flujo
Programación de Máquinas a Control Numérico Maquina a Control Numérico moderna Interior Estructuras Principales Plato Carros Longitudinal y Transversal Torreta Portaherramientas Portaherramientas Flujo
k. R: B = 0,02 i +0,03 j sobre un conductor rectilíneo por el
 FUERZAS SOBRE CORRIENTES 1. Un conductor de 40 cm de largo, con una intensidad de 5 A, forma un ángulo de 30 o con un campo magnético de 0,5 T. Qué fuerza actúa sobre él?. R: 0,5 N 2. Se tiene un conductor
FUERZAS SOBRE CORRIENTES 1. Un conductor de 40 cm de largo, con una intensidad de 5 A, forma un ángulo de 30 o con un campo magnético de 0,5 T. Qué fuerza actúa sobre él?. R: 0,5 N 2. Se tiene un conductor
4. TRANSMISIÓN DE MOVIMIENTO
 Departamento Tecnología I.E.S. Drago Cádiz PÁG. 1 # ACTIVIDADES 1.- Indica cuáles de las siguientes máquinas son simples y cuáles compuestas: Abrelatas Pinzas Reloj de pared Abrebotellas Batidora Tornillo
Departamento Tecnología I.E.S. Drago Cádiz PÁG. 1 # ACTIVIDADES 1.- Indica cuáles de las siguientes máquinas son simples y cuáles compuestas: Abrelatas Pinzas Reloj de pared Abrebotellas Batidora Tornillo
Tecnología 1º E.S.O. Nombre y apellidos: Curso: http://auladetecnologias.blogspot.com/ @TL 1
 Tecnología 1º E.S.O. UERNO E EJERIIOS: Nombre y apellidos: urso: http://auladetecnologias.blogspot.com/ @TL 1 MÁQUINS Y MENISMOS 1. uántos tipos de palancas conoces? Pon al menos dos ejemplos de cada tipo.
Tecnología 1º E.S.O. UERNO E EJERIIOS: Nombre y apellidos: urso: http://auladetecnologias.blogspot.com/ @TL 1 MÁQUINS Y MENISMOS 1. uántos tipos de palancas conoces? Pon al menos dos ejemplos de cada tipo.
1) La relación de transmisión en una articulación o junta cardan siempre es: a) 2 b) 1 c) Depende del número de revoluciones d) 0,5
 La relación de transmisión en una articulación o junta cardan siempre es: a) 2 b) 1 c) Depende del número de revoluciones d) 0,5") Tecnología Industrial I Rodear la respuesta correcta: Sistemas mecánicos Ejercicios Repaso Curso 2009/10 1) La relación de transmisión en una articulación o junta cardan siempre es: a) 2 b) 1 c) Depende
Tecnología Industrial I Rodear la respuesta correcta: Sistemas mecánicos Ejercicios Repaso Curso 2009/10 1) La relación de transmisión en una articulación o junta cardan siempre es: a) 2 b) 1 c) Depende
Fuerzas coplanares y no coplanares. Principio de transmisibilidad de las fuerzas
 2.ESTÁTICA La palabra estática se deriva del griego statikós que significa inmóvil. En virtud de que la dinámica estudia la causa que originan la causa del reposo o movimiento de los cuerpos, tenemos que
2.ESTÁTICA La palabra estática se deriva del griego statikós que significa inmóvil. En virtud de que la dinámica estudia la causa que originan la causa del reposo o movimiento de los cuerpos, tenemos que
DISEÑO DE TRASMISIÓN POR CADENA EDWIN ANDRES CORREA QUINTANA
 DISEÑO DE TRASMISIÓN POR CADENA EDWIN ANDRES CORREA QUINTANA UNIVERSIDAD DE ANTIOQUIA FACULTAD DE INGENIERÍA DEPARTAMENTO DE INGENIERÍA MECÁNICA MEDELLÍN 2010 1 CONTENIDO INTRODUCCIÓN... 5 OBJETIVO GENERAL...
DISEÑO DE TRASMISIÓN POR CADENA EDWIN ANDRES CORREA QUINTANA UNIVERSIDAD DE ANTIOQUIA FACULTAD DE INGENIERÍA DEPARTAMENTO DE INGENIERÍA MECÁNICA MEDELLÍN 2010 1 CONTENIDO INTRODUCCIÓN... 5 OBJETIVO GENERAL...
Desarrollo de Poliedros Regulares: Generalidades. Ejercicios Resueltos. Ejercicio 1 Ejercicio 2 Ejercicio 3 Ejercicio 4 Ejercicio 5
 DESARROLLO DE POLIEDROS REGULARES UNIDAD IV: DESARROLLO DE SÓLIDOS En esta unidad se dibujarán las superficies de poliedros y cuerpos redondos modelos. Los temas de esta unidad son: sobre un plano para
DESARROLLO DE POLIEDROS REGULARES UNIDAD IV: DESARROLLO DE SÓLIDOS En esta unidad se dibujarán las superficies de poliedros y cuerpos redondos modelos. Los temas de esta unidad son: sobre un plano para
Conceptos básicos de Geometría
 Conceptos básicos de geometría La geometría trata de la medición y de las propiedades de puntos, líneas, ángulos, planos y sólidos, así como de las relaciones que guardan entre sí. A continuación veremos
Conceptos básicos de geometría La geometría trata de la medición y de las propiedades de puntos, líneas, ángulos, planos y sólidos, así como de las relaciones que guardan entre sí. A continuación veremos
8. LA CIRCUNFERENCIA Y EL CÍRCULO. 8.1. La Circunferencia. 8.2. El circulo. Dibujo Técnico La Circunferencia y el círculo
 8. LA CIRCUNFERENCIA Y EL CÍRCULO 8.1. La Circunferencia. Una circunferencia es una línea curva, cerrada y plana, cuyos puntos están a la misma distancia de otro interior al que llamamos centro, es decir:
8. LA CIRCUNFERENCIA Y EL CÍRCULO 8.1. La Circunferencia. Una circunferencia es una línea curva, cerrada y plana, cuyos puntos están a la misma distancia de otro interior al que llamamos centro, es decir:
Guia PSU Matemática IV Medio PERÍMETROS, ÁREAS Y VOLÚMENES
 PERÍMETROS, ÁREAS Y VOLÚMENES Antes de entrar al análisis de fórmulas referente al perímetro, área y volumen de figuras geométricas, repasemos estos temas y efectuemos ejercicios pertinentes Llamamos área
PERÍMETROS, ÁREAS Y VOLÚMENES Antes de entrar al análisis de fórmulas referente al perímetro, área y volumen de figuras geométricas, repasemos estos temas y efectuemos ejercicios pertinentes Llamamos área
UNIDAD II FUNCIONES. Ing. Ronny Altuve Esp.
 República Bolivariana de Venezuela Universidad Alonso de Ojeda Administración Mención Gerencia y Mercadeo UNIDAD II FUNCIONES Ing. Ronny Altuve Esp. Ciudad Ojeda, Septiembre de 2015 Función Universidad
República Bolivariana de Venezuela Universidad Alonso de Ojeda Administración Mención Gerencia y Mercadeo UNIDAD II FUNCIONES Ing. Ronny Altuve Esp. Ciudad Ojeda, Septiembre de 2015 Función Universidad
mîquinas de elevación y transporte
 mîquinas de elevación y transporte Tema 3 ; Escaleras mecánicas Juan Carlos Santamarta Cerezal Ingeniero de Montes e ITOP Doctor en Ingeniería por la UPM (ETSICCP, Hidráulica y Energética) 2 contenido
mîquinas de elevación y transporte Tema 3 ; Escaleras mecánicas Juan Carlos Santamarta Cerezal Ingeniero de Montes e ITOP Doctor en Ingeniería por la UPM (ETSICCP, Hidráulica y Energética) 2 contenido
XIX OLIMPIADA NACIONAL DE MATEMÁTICA TERCERA RONDA REGIONAL - 1 DE SETIEMBRE DE 2007 - NIVEL 1. Nombre y Apellido:... C.I.:...
 TERCERA RONDA REGIONAL - 1 DE SETIEMBRE DE 2007 - NIVEL 1 Nombre y Apellido:..................................... C.I.:.................. Grado:......... Sección:........ Puntaje:........... Los dibujos
TERCERA RONDA REGIONAL - 1 DE SETIEMBRE DE 2007 - NIVEL 1 Nombre y Apellido:..................................... C.I.:.................. Grado:......... Sección:........ Puntaje:........... Los dibujos
Lección 15: Líneas, ángulos y circulos
 Lección 15: Líneas, ángulos y circulos En esta lección revisaremos algunos conceptos que usted muy probablemente conoce bien. Líneas y ángulos Una línea puede ser curva, como la de la izquierda, o recta,
Lección 15: Líneas, ángulos y circulos En esta lección revisaremos algunos conceptos que usted muy probablemente conoce bien. Líneas y ángulos Una línea puede ser curva, como la de la izquierda, o recta,
Cinemática en 2D: Movimiento Circular.
 Cinemática en 2D: Movimiento Circular. Movimiento circular uniforme Otro caso particular de movimiento en dos dimensiones es el de una partícula que se mueve describiendo una trayectoria circular, con
Cinemática en 2D: Movimiento Circular. Movimiento circular uniforme Otro caso particular de movimiento en dos dimensiones es el de una partícula que se mueve describiendo una trayectoria circular, con
VOLUMENES DE SÓLIDOS DE REVOLUCION
 OLUMENES DE SÓLIDOS DE REOLUCION Los sólidos de revolución son sólidos que se generan al girar una región plana alrededor de un eje. Por ejemplo: el cono es un sólido que resulta al girar un triángulo
OLUMENES DE SÓLIDOS DE REOLUCION Los sólidos de revolución son sólidos que se generan al girar una región plana alrededor de un eje. Por ejemplo: el cono es un sólido que resulta al girar un triángulo
1) Nombre del mecanismo: Ruedas de fricción, transmisión por correa, engranajes y transmisión por cadena.
 Nombre del mecanismo: Ruedas de fricción, transmisión por correa, engranajes y transmisión por cadena.") Ficha nº:3 Transmisión circular. 1) Nombre del mecanismo: Ruedas de fricción, transmisión por correa, engranajes y transmisión por cadena. 2) Descripción: Ruedas de fricción: Son sistemas formados por
Ficha nº:3 Transmisión circular. 1) Nombre del mecanismo: Ruedas de fricción, transmisión por correa, engranajes y transmisión por cadena. 2) Descripción: Ruedas de fricción: Son sistemas formados por
1º ESO GEOMETRÍA PLANA: ÁNGULOS Y TRIÁNGULOS
 1º ESO GEOMETRÍA PLANA: ÁNGULOS Y TRIÁNGULOS 1.- ÁNGULOS Un ángulo es la porción de plano limitada por dos semirrectas o rayos que tienen el mismo origen. Los lados del ángulo son las semirrectas que lo
1º ESO GEOMETRÍA PLANA: ÁNGULOS Y TRIÁNGULOS 1.- ÁNGULOS Un ángulo es la porción de plano limitada por dos semirrectas o rayos que tienen el mismo origen. Los lados del ángulo son las semirrectas que lo
Hoja de problemas nº 7. Introducción a la Geometría
 Hoja de problemas nº 7 Introducción a la Geometría 1. Un rectángulo tiene de área 135 u 2 a. Si sus lados miden números enteros, averigua cuáles pueden ser sus dimensiones. b. Cortamos los vértices como
Hoja de problemas nº 7 Introducción a la Geometría 1. Un rectángulo tiene de área 135 u 2 a. Si sus lados miden números enteros, averigua cuáles pueden ser sus dimensiones. b. Cortamos los vértices como
b) Podemos aplicar la misma fórmula anterior para el número de vueltas Nv. Es decir:
 Podemos aplicar la misma fórmula anterior para el número de vueltas Nv. Es decir:") EJERIIO RESUELTO. ENGRNJES OPLDOS 1.- Supongamos que en la figura adjunta, el engranaje conducido tiene 20 dientes y el engranaje motriz 60 dientes. Si el engranaje motriz gira a 1200 rpm, averiguar: a)
EJERIIO RESUELTO. ENGRNJES OPLDOS 1.- Supongamos que en la figura adjunta, el engranaje conducido tiene 20 dientes y el engranaje motriz 60 dientes. Si el engranaje motriz gira a 1200 rpm, averiguar: a)
EJERCICIOS BLOQUE III: GEOMETRÍA
 EJERCICIOS BLOQUE III: GEOMETRÍA (00-M-A-4) (5 puntos) Determina el centro y el radio de la circunferencia que pasa por el origen de coordenadas, tiene su centro en el semieje positivo de abscisas y es
EJERCICIOS BLOQUE III: GEOMETRÍA (00-M-A-4) (5 puntos) Determina el centro y el radio de la circunferencia que pasa por el origen de coordenadas, tiene su centro en el semieje positivo de abscisas y es
6. Un hombre de 70 kg de masa se encuentra en la cabina de un ascensor, cuya altura es de 3 m.
 1 1. De los extremos de una cuerda que pasa por la garganta de una polea sin rozamiento y de masa despreciable, cuelgan dos masas iguales de 200 gramos cada una. Hallar la masa que habrá de añadirse a
1 1. De los extremos de una cuerda que pasa por la garganta de una polea sin rozamiento y de masa despreciable, cuelgan dos masas iguales de 200 gramos cada una. Hallar la masa que habrá de añadirse a
EJERCICIOS DEL CAPÍTULO 9 - ELECTROMAGNETISMO
 EJERCICIOS DEL CAPÍTULO 9 - ELECTROMAGNETISMO C9. 1 Aceleramos iones de los isótopos C-12, C-13 y C-14 con una d.d.p. de 100 kv y los hacemos llegar a un espectrógrafo de masas perpendicularmente a la
EJERCICIOS DEL CAPÍTULO 9 - ELECTROMAGNETISMO C9. 1 Aceleramos iones de los isótopos C-12, C-13 y C-14 con una d.d.p. de 100 kv y los hacemos llegar a un espectrógrafo de masas perpendicularmente a la
ÁNGULOS EN POLÍGONOS. Ejercicio nº 1.- En los siguientes polígonos, halla la media del ángulo : a b c. Ejercicio nº 2.-
 ÁNGULOS EN POLÍGONOS Ejercicio nº 1.- En los siguientes polígonos, halla la media del ángulo : a b c Ejercicio nº.- Halla el valor del ángulo en cada uno de estos casos: a b c Ejercicio nº 3.- Halla el
ÁNGULOS EN POLÍGONOS Ejercicio nº 1.- En los siguientes polígonos, halla la media del ángulo : a b c Ejercicio nº.- Halla el valor del ángulo en cada uno de estos casos: a b c Ejercicio nº 3.- Halla el
UNIDAD 3.- MECANISMOS
 UNIDAD 3.- MECANISMOS 3.1.- Máquinas simples 3.2.- Mecanismos de transmisión de movimiento 3.3.- Mecanismos de transformación de movimiento MECANISMOS DE TRANSMISIÓN Y TRANSFORMACIÓN DE MOVIMIENTO Un MECANISMO
UNIDAD 3.- MECANISMOS 3.1.- Máquinas simples 3.2.- Mecanismos de transmisión de movimiento 3.3.- Mecanismos de transformación de movimiento MECANISMOS DE TRANSMISIÓN Y TRANSFORMACIÓN DE MOVIMIENTO Un MECANISMO
MATEMÁTICAS BÁSICAS CIRCUNFERENCIA DEFINICIÓN DE CIRCUNFERENCIA
 MATEMÁTICAS BÁSICAS CIRCUNFERENCIA DEFINICIÓN DE CIRCUNFERENCIA Una circunferencia se define como el lugar geométrico de los puntos que equidistan de un punto fijo en el plano llamado centro. La distancia
MATEMÁTICAS BÁSICAS CIRCUNFERENCIA DEFINICIÓN DE CIRCUNFERENCIA Una circunferencia se define como el lugar geométrico de los puntos que equidistan de un punto fijo en el plano llamado centro. La distancia
Matemáticas 4 Enero 2016
 Laboratorio #1 Vectores I.- Calcule el producto escalar de los dos vectores y el coseno del ángulo entre ellos. 1) u = 3i + 2j 4k; v = i + 5j 3k 2) u = i + 2j 3k; v = 1i 2j + 3k 3) u = 1 2 i + 1 3 j +
Laboratorio #1 Vectores I.- Calcule el producto escalar de los dos vectores y el coseno del ángulo entre ellos. 1) u = 3i + 2j 4k; v = i + 5j 3k 2) u = i + 2j 3k; v = 1i 2j + 3k 3) u = 1 2 i + 1 3 j +
NORMAS TECNICAS PARA DIBUJO TÉCNICO UNIVERSIDAD PILOTO DE COLOMBIA
 NORMAS TECNICAS PARA DIBUJO TÉCNICO UNIVERSIDAD PILOTO DE COLOMBIA Facultad de Ingeniería Mecatrónica Ana M. Blanco CONTENIDO SEGUNDA PARTE Principios generales de presentación NTC 1777. Dimensionamiento
NORMAS TECNICAS PARA DIBUJO TÉCNICO UNIVERSIDAD PILOTO DE COLOMBIA Facultad de Ingeniería Mecatrónica Ana M. Blanco CONTENIDO SEGUNDA PARTE Principios generales de presentación NTC 1777. Dimensionamiento
UNIVERSIDAD NACIONAL DE ASUNCIÓN FACULTAD DE INGENIERÍA CURSO PREPARATORIO DE INGENIERÍA (CPI) EJERCITARIO PRÁCTICO DE GEOMETRÍA ANALÍTICA
 EJERCITARIO PRÁCTICO DE GEOMETRÍA ANALÍTICA") UNIVERSIDAD NACIONAL DE ASUNCIÓN FACULTAD DE INGENIERÍA CURSO PREPARATORIO DE INGENIERÍA (CPI) EJERCITARIO PRÁCTICO DE GEOMETRÍA ANALÍTICA AÑO 014 CURSO PREPARATORIO DE INGENIERÍA CPI-014 TRASLACIÓN Y/O
UNIVERSIDAD NACIONAL DE ASUNCIÓN FACULTAD DE INGENIERÍA CURSO PREPARATORIO DE INGENIERÍA (CPI) EJERCITARIO PRÁCTICO DE GEOMETRÍA ANALÍTICA AÑO 014 CURSO PREPARATORIO DE INGENIERÍA CPI-014 TRASLACIÓN Y/O
TRANSFORMACIONES DEL PLANO
 PROBLEMAS DE GEOMETRÍA. TRANSFORMACIONES DEL PLANO 1. Un producto de dos simetrías axiales de ejes perpendiculares A qué transformación corresponde? En qué se transforma un segmento vertical? ( ) 2. Cuál
PROBLEMAS DE GEOMETRÍA. TRANSFORMACIONES DEL PLANO 1. Un producto de dos simetrías axiales de ejes perpendiculares A qué transformación corresponde? En qué se transforma un segmento vertical? ( ) 2. Cuál
EJERCICIOS Nº 10: GEOMETRIA ANALITICA. se extiende hacia cada extremo en una longitud igual a su longitud original. Halle las coordenadas de
 EJERCICIOS Nº 1: GEOMETRIA ANALITICA 1) Determine x si el punto A (x,3) equidista de B ( 3, ) y de C (7,4) Respuesta ) Determine los puntos de trisección del segmento de recta AB donde A( 6, 9), B(6,9)
EJERCICIOS Nº 1: GEOMETRIA ANALITICA 1) Determine x si el punto A (x,3) equidista de B ( 3, ) y de C (7,4) Respuesta ) Determine los puntos de trisección del segmento de recta AB donde A( 6, 9), B(6,9)
EJERCICIOS BLOQUE III: GEOMETRÍA
 EJERCICIOS BLOQUE III: GEOMETRÍA (00-M-A-4) (5 puntos) Determina el centro y el radio de la circunferencia que pasa por el origen de coordenadas, tiene su centro en el semieje positivo de abscisas y es
EJERCICIOS BLOQUE III: GEOMETRÍA (00-M-A-4) (5 puntos) Determina el centro y el radio de la circunferencia que pasa por el origen de coordenadas, tiene su centro en el semieje positivo de abscisas y es
Definición de vectores
 Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen O también denominado Punto de aplicación. Es el punto exacto sobre
Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen O también denominado Punto de aplicación. Es el punto exacto sobre
Última modificación: 1 de agosto de 2010. www.coimbraweb.com
 PROPAGACIÓN EN GUÍA DE ONDAS Contenido 1.- Introducción. 2. - Guía de ondas. 3.- Inyección de potencia. 4.- Modos de propagación. 5.- Impedancia característica. 6.- Radiación en guías de ondas. Objetivo.-
PROPAGACIÓN EN GUÍA DE ONDAS Contenido 1.- Introducción. 2. - Guía de ondas. 3.- Inyección de potencia. 4.- Modos de propagación. 5.- Impedancia característica. 6.- Radiación en guías de ondas. Objetivo.-
Facultad de Ciencias Curso 2010-2011 Grado de Óptica y Optometría SOLUCIONES PROBLEMAS FÍSICA. TEMA 4: CAMPO MAGNÉTICO
 SOLUCIONES PROLEMAS FÍSICA. TEMA 4: CAMPO MAGNÉTICO. Dos conductores rectilíneos, paralelos mu largos transportan corrientes de sentidos contrarios e iguales a,5 A. Los conductores son perpendiculares
SOLUCIONES PROLEMAS FÍSICA. TEMA 4: CAMPO MAGNÉTICO. Dos conductores rectilíneos, paralelos mu largos transportan corrientes de sentidos contrarios e iguales a,5 A. Los conductores son perpendiculares
Calcular la altura del cono de superficie lateral mínima circunscrito a una esfera de radio 4cm.
 OPTIMIZACION DE FUNCIONES Calcular la altura del cono de superficie lateral mínima circunscrito a una esfera de radio 4cm. S = пrg Si los triángulos DCO y DAB que son semejantes, pues OC AB y poseen un
OPTIMIZACION DE FUNCIONES Calcular la altura del cono de superficie lateral mínima circunscrito a una esfera de radio 4cm. S = пrg Si los triángulos DCO y DAB que son semejantes, pues OC AB y poseen un
Departamento de Tecnología I.E.S. San José (Villanueva de la Serena) Bloque de contenidos: EXPRESIÓN GRÁFICA
 Bloque de contenidos: EXPRESIÓN GRÁFICA") ACOTACIÓN. Una de características fundamentales de un croquis es que sus figuras se encuentran acotadas. Que el dibujo de una pieza u objeto incluya el valor de sus dimensiones, es decir, esté acotado,
ACOTACIÓN. Una de características fundamentales de un croquis es que sus figuras se encuentran acotadas. Que el dibujo de una pieza u objeto incluya el valor de sus dimensiones, es decir, esté acotado,