FUNCIONES DE UNA VARIABLE Julián de la Horra Departamento de Matemáticas U.A.M.
|
|
|
- Juan Carlos Peña Vidal
- hace 9 años
- Vistas:
Transcripción
1 FUNCIONES DE UNA VARIABLE Julián de la Horra Departamento de Matemáticas U.A.M. 1 Introducción Una de las primeras necesidades que surgen en las Ciencias Experimentales es la de poder expresar los valores de una variable en función de los valores de otra variable. Por ejemplo, podemos estar interesados en expresar: El peso de las personas (Y ) en función de su estatura (X). El peso de las aves de una especie (Y ) en función de su envergadura (X). El nivel medio de contaminación semanal (Y ) en función de las precipitaciones que se han producido (X). La altura del oleaje (Y ) en función de la velocidad del viento (X). El número de ejemplares (N) de una especie en cierto hábitat en función del tiempo (T ). La concentración de oxígeno en el agua (X) en función del tiempo (T ). En general, diremos que nos interesa expresar una variable Y en función de otra variable X. La variable Y puede recibir distintos nombres: variable dependiente, variable de interés, variable respuesta,... La variable X también puede recibir diferentes nombres: variable independiente, variable explicativa,... El modelo matemático adecuado para expresar una variable Y en función de otra variable X es la función de una variable. Este modelo, no sólo permite expresar una variable en función de otra, sino que las herramientas asociadas a este modelo (límites, derivadas,...) nos permiten abordar y expresar, de manera sencilla, muchos aspectos interesantes de la relación entre las dos variables. 2 Función de una variable Definición.- Una función de una variable, y = f(x), es el modelo matemático que nos dice cuál es el valor de la variable Y para cada posible valor de la variable X. 1
 en función de su estatura (X). El peso de las aves de una especie (Y ) en función de su envergadura (X).")
2 Algunas veces tiene sentido considerar todos los valores de la recta real como posibles valores de X, otras veces tiene sentido considerar para X solamente los valores positivos, otras veces consideraremos un intervalo,... En general, los valores posibles de X reciben el nombre de dominio. A continuación, vamos a ir repasando todos los conceptos y herramientas habitualmente relacionados con las funciones de una variable (continuidad, derivadas, asíntotas,... ) pero poniendo especial énfasis en su utilidad y en su interpretación. 3 Discontinuidades Definición.- Una función y = f(x) es continua en un punto x 0, cuando: lim x x 0 f(x) = lim f(x) = f(x 0 ). x x + 0 Lo más importante para nosotros de esta definición es entender el significado intuitivo que puede tener una discontinuidad: Ejemplo 1.- Consideremos la función N = f(t) que expresa el número de ejemplares de una especie en una reserva natural en función del tiempo. Una discontinuidad en un instante t 0 representa una variación brusca en el número de ejemplares. Si la discontinuidad tiene un salto hacia abajo, representa una disminución brusca de la población como consecuencia, por ejemplo, de un desastre natural. Si la discontinuidad presenta un salto hacia arriba, representa un aumento brusco de la población como consecuencia, por ejemplo, de una suelta de ejemplares para repoblar la zona. En cualquier caso, conviene destacar que la mayoría de las funciones que vamos a utilizar en las Ciencias Experimentales son funciones continuas. 4 Derivadas La derivada de una función es una herramienta enormemente útil para estudiar los intervalos de crecimiento y decrecimiento de la función, sus máximos, mínimos,... Pero, sobre todo, es enormemente útil porque su interpretación juega un papel central en muchos fenómenos experimentales. 2
 pero poniendo especial énfasis en su utilidad y en su interpretación. 3 Discontinuidades Definición.")
3 Definición.- La derivada de una función y = f(x) en un punto x 0 es: f f(x 0 + h) f(x 0 ) (x 0 ) = lim. h 0 h Ver la Figura 1 para la interpretación gráfica. La función derivada se suele representar como y = f (x). Por supuesto, podemos considerar también la derivada segunda, y = f (x), y así sucesivamente. En todo lo que viene a continuación supondremos la existencia de derivadas de las funciones que estemos analizando. Dicho de mánera gráfica, supondremos que estas funciones son suaves. A partir de la definición de derivada se van obteniendo una serie de reglas que permiten obtener, de manera sencilla, la derivada de cualquier función. Estas reglas las supondremos previamente conocidas. Es fundamental tener claro el significado de la derivada de una función. A partir de la definición y de la Figura 1, es fácil darse cuenta de que la derivada de y = f(x) en x 0 proporciona la pendiente de la curva y = f(x) en el punto x 0. Expresado en términos más intuitivos: Significado de la derivada f (x) representa la variación de la variable Y por cada unidad que aumenta la variable X. O dicho de otra manera, la derivada f (x) representa la velocidad de variación de la variable Y con respecto a X. Análogamente, la derivada segunda, y = f (x), representaría la velocidad de variación de Y, y así sucesivamente. Ejemplo 1 (continuación).- Si la función N = f(t) expresa el número de ejemplares de una especie en una reserva natural en función del tiempo, su derivada, N = f (t), representa la variación del tamaño de la población por unidad de tiempo, es decir, la velocidad de variación del número de ejemplares con respecto al tiempo. 5 Crecimiento, decrecimiento, máximos y mínimos relativos Una de las aplicaciones esenciales de las derivadas es que son muy útiles para hallar los intervalos donde una función crece o decrece, y para hallar 3

4 máximos y mínimos relativos de una función. Los intervalos en los que una función crece o decrece, así como los máximos y mínimos relativos pueden estudiarse con la primera derivada. El razonamiento es muy sencillo, y utiliza el significado de la derivada que se ha dado anteriormente: Cuando una función, y = f(x), es creciente en un intervalo, su velocidad de variación es positiva. Como la velocidad de variación viene expresada por la derivada primera, esto se traduce en una regla muy sencilla: Regla Cuando y = f (x) > 0 en un intervalo, la función es creciente en ese intervalo. Cuando una función, y = f(x), es decreciente en un intervalo, su velocidad de variación es negativa. Como la velocidad de variación viene expresada por la derivada primera, esto se traduce en una regla muy sencilla: Regla Cuando y = f (x) < 0 en un intervalo, la función es decreciente en ese intervalo. Veamos ahora los máximos y los mínimos relativos: La función y = f(x) presenta un máximo relativo en el punto x 0 cuando en ese punto la función pasa de ser creciente a ser decreciente. Es decir, cuando y = f (x) pasa de ser positiva a ser negativa. En resumen, tenemos la siguiente regla: Regla La función y = f(x) presenta un máximo relativo en x 0 cuando ocurren las siguientes cosas: 1. f (x 0 ) = 0 2. Antes de x 0, la derivada primera es positiva 3. Después de x 0, la derivada primera es negativa. La función y = f(x) presenta un mínimo relativo en el punto x 0 cuando en ese punto la función pasa de ser decreciente a ser creciente. Es decir, cuando y = f (x) pasa de ser negativa a ser positiva. En resumen, tenemos la siguiente regla: 4
 > 0 en un intervalo, la función es creciente en ese intervalo.")
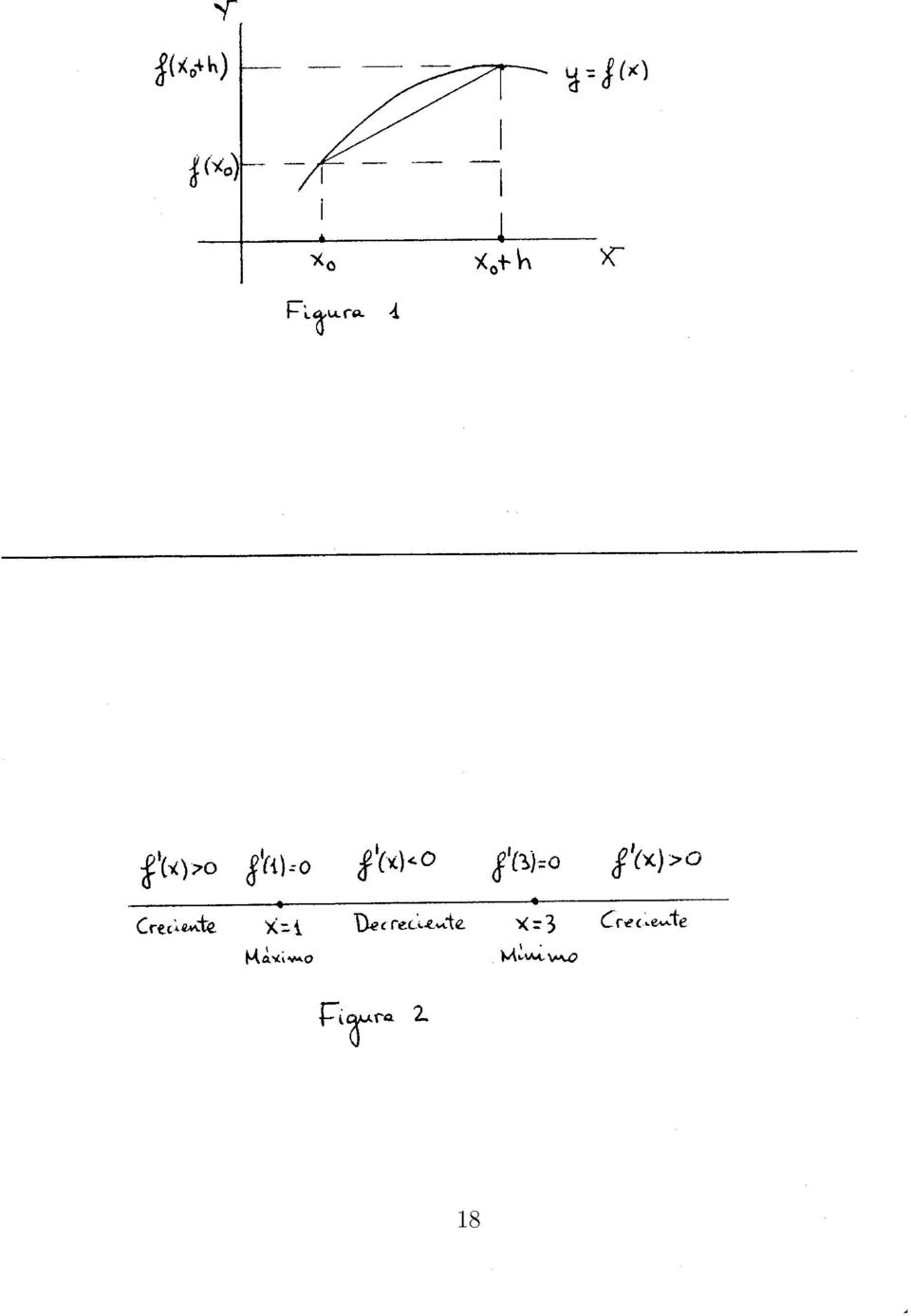
5 Regla La función y = f(x) presenta un mínimo relativo en x 0 cuando: 1. f (x 0 ) = 0 2. Antes de x 0, la derivada primera es negativa 3. Después de x 0, la derivada primera es positiva. Muy frecuentemente, se utiliza la derivada segunda, f (x 0 ), para determinar si nos encontramos ante un máximo o un mínimo relativo. Pero, como se acaba de indicar, eso es innecesario. Es suficiente con analizar la derivada primera. El programa de trabajo para deteminar zonas de crecimiento, decrecimiento, máximos y mínimos relativos es el siguiente: 1. Calculamos la función derivada primera: y = f (x). 2. Planteamos y resolvemos la ecuación f (x) = 0. Las soluciones de esta ecuación serán los potenciales máximos y mínimos relativos (puntos críticos). 3. Determinamos si la derivada es positiva o negativa entre los puntos críticos. Para esto, bastará con evaluar esta derivada en un punto de cada uno de los intervalos obtenidos. 4. Aplicamos las reglas descritas anteriormente. Veamos todo esto en un ejemplo: Ejemplo 2.- Consideramos la función y = x3 3 2x2 + 3x + 5. Aplicamos los pasos anteriores: 1. Calculamos la derivada primera: y = f (x) = x 2 4x Planteamos la ecuación f (x) = 0 x 2 4x + 3 = 0 Obtenemos las soluciones x = 1 y x = 3. 5
. 2. Planteamos y resolvemos la ecuación f (x) = 0.")
6 3. Por ejemplo, para x = 0: f (0) = 3 > 0. Tenemos que f (x) > 0, para x < 1. Por ejemplo, para x = 2: f (2) = 1 < 0. Tenemos que f (x) < 0, para x (1, 3). Por ejemplo, para x = 4: f (4) = 3 > 0. Tenemos que f (x) > 0, para x > Tenemos la situación que se puede ver en la Figura 2. En resumen: Para x < 1, la función es creciente. Para x = 1, la función presenta un máximo relativo. Para x (1, 3), la función es decreciente. Para x = 3, la función presenta un mínimo relativo. Para x > 3, la función es creciente. 6 Concavidades y puntos de inflexión Otra de las aplicaciones fundamentales de las derivadas es su utilización para estudiar el tipo de concavidad y los puntos de inflexión de una función. Para este estudio necesitaremos la segunda derivada. Las funciones presentan concavidades hacia arriba o concavidades hacia abajo en un intervalo cuando son de la forma indicada en la Figura 3. Observemos, en primer lugar, el caso de la concavidad hacia arriba. Si nos fijamos en la Figura 3, observaremos que Y crece cada vez más deprisa, es decir su velocidad de variación es cada vez mayor, lo cual significa que y = f (x) es creciente. Esto se traduce en que y = f (x) > 0. En resumen: Regla Cuando y = f (x) > 0 en un intervalo, la función presenta una concavidad hacia arriba en ese intervalo. Observemos, ahora, el caso de la concavidad hacia abajo. Si nos fijamos en la Figura 3, observaremos que Y crece cada vez más despacio, es decir su velocidad de variación es cada vez menor, lo cual significa que y = f (x) es decreciente. Esto se traduce en que y = f (x) < 0. En resumen: 6

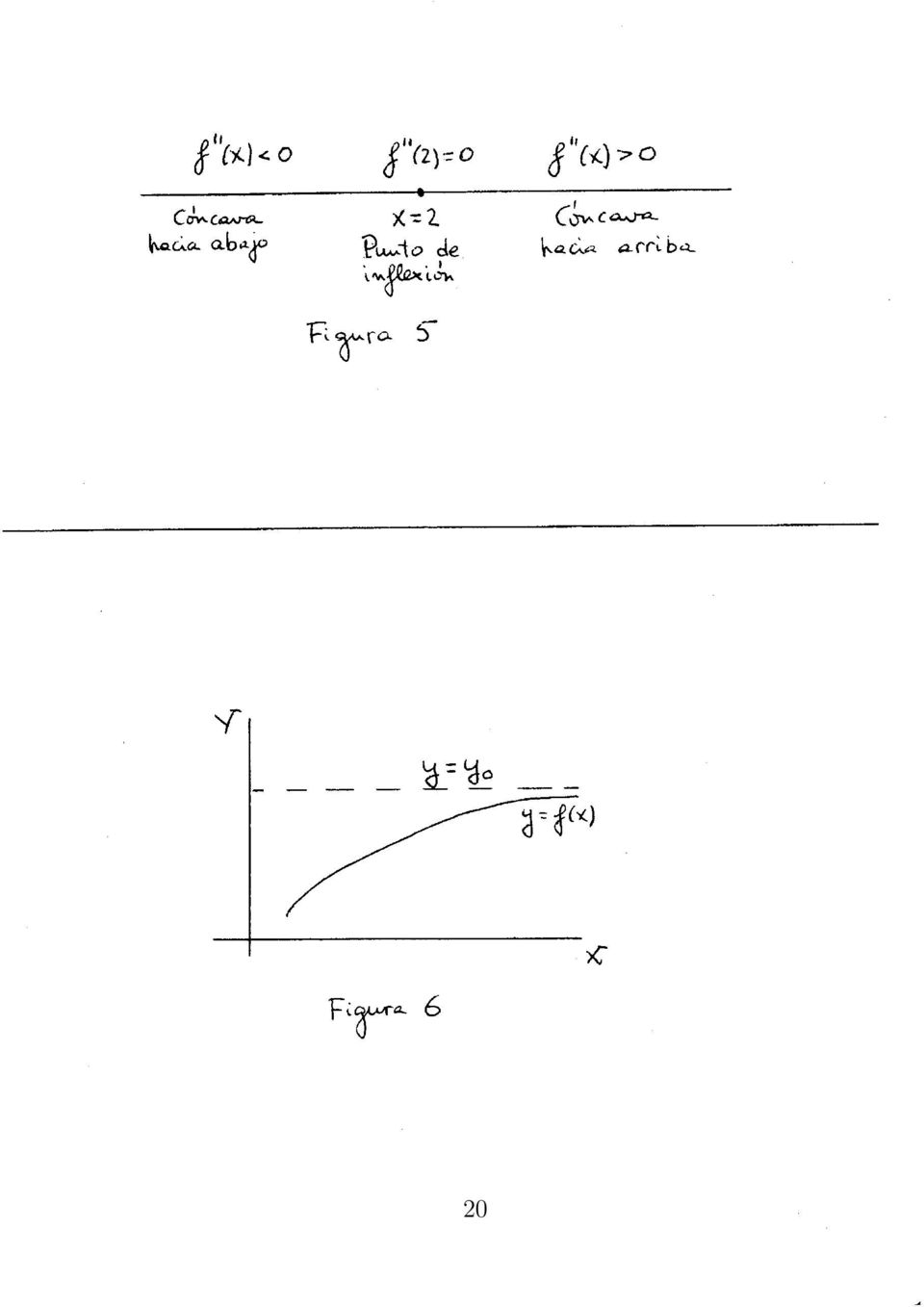
7 Regla Cuando y = f (x) < 0 en un intervalo, la función presenta una concavidad hacia abajo en ese intervalo. Un punto de inflexión es un punto x 0 en el que se produce un cambio en el tipo de concavidad. Ver Figura 4. Al haber un cambio en el tipo de concavidad, la derivada segunda pasa de ser positiva a ser negativa, o al revés. En resumen, tenemos: Regla La función presenta un punto de inflexión en x 0 cuando ocurren las siguientes cosas: 1. f (x 0 ) = 0 2. La derivada segunda cambia de signo. Es muy frecuente evaluar la derivada tercera, f (3 (x 0 ), para determinar si nos encontramos ante un punto de inflexión. Pero, como se acaba de indicar, eso es innecesario. Es suficiente con analizar la derivada segunda. Una propiedad interesante de los puntos de inflexión es la siguiente: En un punto de inflexión, la derivada primera pasa de ser creciente a ser decreciente (o al revés). Es decir, en un punto de inflexión, la derivada primera alcanza un máximo (o un mínimo). Pero la derivada primera es la velocidad de variación de Y así que, por tanto: Significado de un punto de inflexión En un punto de inflexión, la velocidad de variación alcanza un máximo (o un mínimo). El programa de trabajo para deteminar los distintos tipos de concavidad de una función y sus puntos de inflexión es el siguiente: 1. Calculamos la función derivada segunda: y = f (x). 2. Planteamos y resolvemos la ecuación f (x) = 0. Las soluciones de esta ecuación serán los potenciales puntos de inflexión. 3. Determinamos cómo es la derivada segunda (positiva o negativa) entre los potenciales puntos de inflexión. Para esto, bastará con evaluar esta derivada segunda en un punto de cada uno de los intervalos obtenidos. 7
 = 0 2. La derivada segunda cambia de signo.")
8 4. Aplicamos las reglas descritas anteriormente. Veamos todo esto en un ejemplo: Ejemplo 2 (continuación).- Consideramos la función y = x3 3 2x2 + 3x + 5. Aplicamos los pasos anteriores: 1. Calculamos la derivada segunda: y = f (x) = x 2 4x + 3 y = f (x) = 2x Planteamos la ecuación f (x) = 0 2x 4 = 0 Obtenemos la solución x = Por ejemplo, para x = 0: f (0) = 4 < 0. Tenemos que f (x) < 0, para x < 2. Por ejemplo, para x = 4: f (4) = 4 > 0. Tenemos que f (x) > 0, para x > Tenemos la situación que se puede ver en la Figura 5. En resumen: Para x < 2, la función es cóncava hacia abajo. Para x = 2, la función presenta un punto de inflexión. Para x > 2, la función es cóncava hacia arriba. 7 Asíntotas Las asíntotas con más interés en las aplicaciones son las asíntotas horizontales y las asíntotas oblícuas. Las estudiamos a continuación. Definición.- La función y = f(x) tiene una asíntota horizontal en la recta y = y 0 cuando: lim x f(x) = y 0 De manera análoga, podemos hablar de asíntotas horizontales cuando x, aunque suelen tener menos interés en las aplicaciones. El significado gráfico de una asíntota horizontal se puede ver en la Figura 6. El significado intuitivo es sencillo: 8

9 Significado de una asíntota horizontal Si y = y 0 es una asíntota horizontal, esto significa que, para valores grandes de X, el valor de Y tiende a estabilizarse en el valor y 0. El procedimiento para encontrar una asíntota horizontal es sencillo: 1. Calculamos lim x f(x). 2. Si este límite tiene un valor finito, y 0, la recta y = y 0 es asíntota horizontal. En caso contrario, no existe asíntota horizontal. Ejemplo 1 (continuación).- Consideremos la función N = f(t) que expresa el número de ejemplares de una especie en función del tiempo. Si existe una asíntota horizontal, N = N 0, esto significa que, a largo plazo, el número de ejemplares tiende a estabilizarse en N 0. Definición.- La función y = f(x) tiene una asíntota oblicua en la recta y = mx + b cuando: lim [f(x) mx b] = 0 x De manera análoga, podemos hablar de asíntotas oblicuas cuando x, aunque suelen tener menos interés en las aplicaciones. El significado gráfico de una asíntota oblicua se puede ver en la Figura 7. El significado intuitivo es sencillo: Significado de una asíntota oblicua Si y = mx + b es una asíntota oblicua, esto significa que, para valores grandes de X, la velocidad de variación de Y con respecto a X tiende a estabilizarse en el valor m. La interpretación anterior ayuda a diseñar un procedimiento sencillo para encontrar una asíntota oblicua: 1. Calculamos lim x f (x). 2. Si este límite tiene un valor finito y distinto de cero, m, existe una asintota oblicua cuya pendiente es m. En caso contrario, no existe asintota oblicua. 3. Sólo falta por calcular el término independiente, b, de la asíntota oblicua. Este será el valor del lim x [f(x) mx]. 9

10 8 Aproximaciones de una función Las derivadas de una función sirven, no sólo para todo lo que se ha indicado en las secciones anteriores, sino también para obtener aproximaciones de esa función mediante polinomios. La aproximación más sencilla se consigue utilizando simplemente la primera derivada. Esta es una construcción intuitivamente muy fácil de comprender, pero en la que se manejan conceptos que, posteriormente, serán muy útiles. La vemos a continuación: Recta tangente: concepto de diferencial La derivada de una función en un punto x 0, f (x 0 ), proporciona la pendiente de la curva en ese punto y, también, la pendiente de la recta tangente a la curva en ese punto. Utilizando la notación que se puede observar en la Figura 8, tenemos: f (x 0 ) = dy dx dy = f (x 0 )dx = f (x 0 )(x x 0 ) Por tanto, tenemos: f(x) f(x 0 ) dy = f (x 0 )(x x 0 ) f(x) f(x 0 )+f (x 0 )(x x 0 ). En definitiva, destacamos dos cosas en lo anterior: 1. Introducción de la notación de las diferenciales: y = f (x) = dy dx 2. Utilización de la derivada primera para obtener una aproximación muy sencilla de la función y = f(x) en los alrededores del punto x 0 : f(x) f(x 0 ) + f (x 0 )(x x 0 ) Polinomios de Taylor Acabamos de ver que, utilizando la primera derivada, podemos conseguir una aproximación sencilla a cualquier función, partiendo de la idea gráfica de la recta tangente. Es una aproximación lineal o de primer grado. Utilizando más derivadas, conseguiremos mejores aproximaciones mediante los polinomios de Taylor, que generalizan la idea anterior: 10
, proporciona la pendiente de la curva en ese punto y, también, la pendiente de la")
11 El polinomio de Taylor de grado n, que aproxima la función y = f(x) en los alrededores del punto x 0, viene dado por: f(x) f(x 0 ) + f (x 0 ) 1! (x x 0 ) + f (x 0 ) 2! (x x 0 ) f (n (x 0 ) (x x 0 ) n n! Aplicación práctica Los polinomios de Taylor de grado n son muy útiles para aproximar cualquier función y = f(x), porque no necesitamos conocer dicha función, ya que, si conociéramos la función, no tendríamos ninguna necesidad de aproximarla. Los polinomios de Taylor de grado n nos permiten reconstruir (de forma aproximada) una función a partir del conocimiento de dos cosas: 1. La velocidad de crecimiento de Y con respecto a X, lo que constituirá la derivada y = f (x). 2. El valor de la función, f(x 0 ), para X = x 0. Esto es lo que se suele llamar un valor inicial de la función, y requiere observar el valor de Y cuando X = x 0. Las sucesivas derivadas que queramos incorporar al polinomio las obtendremos utilizando las reglas habituales de la derivación. Cuantas más derivadas utilicemos, mejor será la aproximación, pero el polinomio será también menos manejable. La idea es encontrar un equilibrio entre la bondad de la aproximación y la manejabilidad del polinomio. 9 Evolución aritmética: modelo lineal La variedad de funciones de una variable que se pueden utilizar para representar una variable Y en términos de otra variable X es infinita, pero en las Ciencias Experimentales, como en todas las aplicaciones, lo que se busca es una función (un modelo) que, siendo razonablemente sencilla, exprese razonablemente bien el fenómeno experimental que se quiere estudiar. En esta sección, vamos a presentar un tipo de fenómenos que se modelizan razonablemente bien mediante el modelo lineal, es decir, mediante una recta. El modelo lineal es el más sencillo de todos. Consideramos una variable respuesta, Y, que evoluciona a lo largo del tiempo según un modelo de progresión aritmética. Las dos condiciones que regulan una evolución aritmética son las siguientes: 11
 una función a partir del conocimiento de dos cosas: 1.")
12 1) En el instante inicial (t = 0), la variable respuesta toma un valor Y 0. 2) Cada unidad de tiempo que pasa, la variable respuesta varía una cantidad fija d (donde d puede ser positiva o negativa). Este es el modelo más sencillo que se puede describir. Es muy fácil determinar el valor de la variable respuesta, Y, cuando han transcurrido 1, 2, 3,... unidades de tiempo: T = 0 Y = Y 0, T = 1 Y = Y 1 = Y 0 + d, T = 2 Y = Y 2 = Y 1 + d = Y 0 + 2d, T = 3 Y = Y 3 = Y 2 + d = Y 0 + 3d. En general, en un instante t: Y = Y t = Y 0 + td. En resumen, la función que recoge la evolución o progresión aritmética de una variable respuesta, Y, en función del tiempo, T, es de la forma: Y = f(t) = Y 0 + td Es una recta de pendiente d, y por eso se suele llamar modelo lineal. A veces, es interesante conocer el valor de la suma de los valores de una variable respuesta, Y, que evoluciona aritméticamente, en los instantes T = 0, 1,..., n. Para esto, consideraremos: S = Y 0 + (Y 0 + d) (Y n d) + Y n S = Y n + (Y n d) (Y 0 + d) + Y 0 Si sumamos los dos miembros de estas dos igualdades, tenemos: 2S = (Y 0 + Y n ) + (Y 0 + Y n ) (Y 0 + Y n ) = (n + 1)(Y 0 + Y n ) S = Y 0+Y n 2 (n + 1) Expresado en palabras, la suma de varios valores consecutivos de una variable respuesta que evoluciona aritméticamente es de la forma: S = Primer valor + Último valor 2 (Número de valores) 12
 = Y 0 + td Es una recta de pendiente d, y por")
13 10 Evolución geométrica: modelo exponencial En esta sección, vamos a presentar un tipo de fenómenos que se modelizan razonablemente bien mediante el modelo exponencial. Consideramos una variable respuesta, Y, que evoluciona a lo largo del tiempo según un modelo de progresión geométrica. Las dos condiciones que regulan una evolución geométrica son las siguientes: 1) En el instante inicial (t = 0), la variable respuesta toma un valor Y 0. 2) Cada unidad de tiempo que pasa, la variable respuesta varía un porcentaje fijo de un α% (donde α puede ser positivo o negativo). Este es también un modelo sencillo, que se utiliza a menudo para explicar la evolución del número de individuos de una población, al menos durante ciertos períodos de tiempo. Es muy fácil determinar el valor de la variable respuesta, Y, cuando han transcurrido 1, 2, 3,... unidades de tiempo: T = 0 Y = Y 0, T = 1 Y = Y 1 = Y 0 + α Y = Y 0 (1 + α ), 100 T = 2 Y = Y 2 = Y 1 + α Y = Y 1 (1 + α ) = Y 100 0(1 + α T = 3 Y = Y 3 = Y 2 + α Y = Y 2 (1 + α ) = Y 100 0(1 + α 100 )2, 100 )3. En general, en un instante t: Y = Y t = Y 0 (1 + α 100 )t. En resumen, la función que recoge la evolución o progresión geométrica de una variable respuesta, Y, en función del tiempo, T, es de la forma: ( Y = f(t) = Y α ) t. 100 Una manera alternativa de escribir este modelo es la siguiente: [ ( Y = f(t) = Y 0 exp t ln 1 + α )] = Y 0 e βt, 100 lo cual justifica el nombre que recibe de modelo exponencial. A veces es interesante conocer el valor de la suma de los valores de una variable respuesta, Y, que evoluciona geométricamente, en los instantes T = 0, 1,..., n. Para esto, llamando r = 1 + α 100, tenemos: S = Y 0 + Y Y n 13
 Cada unidad de tiempo que pasa, la variable respuesta varía un porcentaje fijo de un α% (donde α puede ser positivo o negativo).")
14 ( = Y 0 + Y α ) ( Y α = Y 0 + Y 0 r Y 0 r n Multiplicando los dos miembros por r, tenemos: Sr = Y 0 r + Y 0 r Y 0 r n+1 Restando la primera igualdad de la segunda, tenemos: Sr S = Y 0 r n+1 Y 0 S(r 1) = Y 0 (r n+1 1) S = Y 0(r n+1 1) r 1 En resumen, la suma de varios valores consecutivos de una variable respuesta que evoluciona geométricamente es de la forma: S = (Primer valor) ) n [ r (Número de valores) ] 1 r 1 En el caso especialmente importante en que α es un porcentaje negativo (la variable respuesta va disminuyendo), r toma un valor entre 0 y 1, y podemos hallar la suma de todos los valores de Y a lo largo de los instantes Y = 0, 1, 2,...: S = lim n Y 0 (r n+1 1) r 1 11 Un catálogo de funciones = Y 0( 1) r 1 = Y 0 1 r. En las dos secciones anteriores, hemos visto que el modelo de evolución aritmética daba lugar al modelo lineal y que el modelo de evolución geométrica nos conducía al modelo exponencial. Estos son algunos de los modelos que se utilizan para representar, de forma aproximada, relaciones entre variables en las Ciencias Experimentales. Naturalmente, no son los únicos. A continuación, se ofrece un breve catálogo de algunas de las funciones más utilizadas en este contexto. Modelo lineal Es el modelo que utiliza una función de la forma: y = a + bx 14
![respuesta que evoluciona geométricamente es de la forma: S = (Primer valor) ) n [ r (Número de valores) ] 1 r 1 En el caso especialmente importante en que α es un porcentaje negativo (la variable](/docs-images/40/44907/images/page_14.jpg "respuesta va disminuyendo), r toma un valor entre 0 y 1, y podemos hallar la suma de todos los valores de Y a lo largo de los instantes Y = 0, 1, 2,.")
15 Aparece, por ejemplo, en los modelos de evolución aritmética (como se ha indicado). Modelo exponencial Es el modelo que utiliza una función de la forma: y = ae bx (a > 0) Aparece, por ejemplo, en los modelos de evolución geométrica (como se ha indicado). Modelo logarítmico Es el modelo que utiliza una función de la forma: y = a + b ln x (b > 0) Se utiliza, por ejemplo, para describir empíricamente la relación entre el tamaño (Y ) alcanzado por una planta, y su concentración (X) de hormona del crecimiento. Modelo potencial Es el modelo que utiliza una función de la forma y = ax b (b > 0) Se utiliza, por ejemplo, para describir empíricamente la relación entre dos medidas (X e Y ) realizadas en dos partes diferentes del cuerpo en ejemplares de una misma especie. Es fácil comprobar que este modelo se puede expresar también como una relación lineal entre los logaritmos de las medidas. En Zoología, este tipo de relación recibe el nombre de relación alométrica. Modelo logístico Es el modelo que utiliza una función de la forma: k y = (a, k, b > 0) 1 + ae bx Se utiliza, por ejemplo, para modelizar el tamaño de una población que, al principio experimenta un crecimiento exponencial, pero que después, cuando empiezan a escasear los recursos, ralentiza su crecimiento hasta alcanzar un tamaño que ya no sobrepasa. Modelo inverso Es el modelo que utiliza una función de la forma: y = a + b x (b > 0) 15
 de hormona del crecimiento.")
16 12 Ejemplos de aplicación Vamos a ver algunos sencillos ejemplos de aplicación práctica. Ejemplo 3.- La velocidad de crecimiento del número de bacterias presentes en un cultivo es (aproximadamente) de un 50% cada hora. Al efectuar la primera observación, el cultivo contenía 100 bacterias. (a) Cuántas bacterias podemos esperar al cabo de 6 horas? Y al cabo de un día? (b) Obtener la función que expresa el número de bacterias, N, en función del tiempo, T. (a) Se trata de un modelo de progresión geométrica. En este modelo, al cabo de 6 horas, el número (aproximado) de bacterias sería: ( N = N(6) = ) Al cabo de un día (24 horas): ( N = N(24) = ) (b) En general, tenemos: ( N = N(t) = ) t = 100 e 0,4055t. 100 Obviamente, este modelo puede ser adecuado durante cierto tiempo, pero no de forma indefinida, como se comprende fácilmente viendo los valores obtenidos en el apartado (a). Ejemplo 4.- El número de ejemplares en una reserva natural, N, a lo largo del tiempo, T (en años), lo vamos a describir mediante el siguiente modelo logístico: N = N(t) = e t para t 0 (a) Número de ejemplares en el momento inicial? (b) Número de ejemplares a largo plazo? (c) Cuántos ejemplares hay al cabo de 1 año? Cuál es la velocidad de crecimiento en ese momento? (d) Cuántos ejemplares hay al cabo de 10 años? Cuál es la velocidad de crecimiento en ese momento? (e) Cuándo es máxima la velocidad de crecimiento? 16
 Se trata de un modelo de progresión geométrica. En este modelo, al cabo de 6 horas, el número (aproximado) de bacterias sería: ( N = N(6) = 100 1 + 50 ) 6 1139.")
17 (a) N(0) = , 33. Es decir, en el momento inicial hay unos 33 ejemplares. (b) lim t e t = 200. Es decir, a largo plazo, la población tiene a estabilizarse en unos 200 ejemplares. (c) N(1) = e 1 70, 44. Para conocer la velocidad de crecimiento, necesitamos la derivada: N (1) = 1000e 1 (1+5e 1 ) 2 45, 63. N = 200(5)e t (1 + 5e t ) 2 = 1000e t (1 + 5e t ) 2. En resumen, al cabo de 1 año, hay unos 70 ejemplares, y la velocidad de crecimiento es de unos 46 ejemplares por año. (d) N(10) = e , 95; N (10) = 1000e 10 (1+5e 10 ) 2 0, 05. En resumen, al cabo de 10 años, hay unos 200 ejemplares, y la velocidad de crecimiento es prácticamente cero. Es decir, a los 10 años, la población ha alcanzado su techo de unos 200 ejemplares. (e) La velocidad de crecimiento (la derivada) será máxima cuándo la derivada segunda se anule. Por tanto, necesitamos obtener la derivada segunda: N = 1000e t (1 + 5e t ) e t (2)(1 + 5e t )(5)e t (1 + 5e t ) 4 = 1000e t (5e t 1) (1 + 5e t ) 3 = 0 Esto nos lleva a la ecuación 5e t 1 = 0, cuya solución se obtiene fácilmente: t = ln 5 1, 61. Es decir, la máxima velocidad de crecimiento de la población se alcanza, aproximadamente, al cabo de 1,61 años. 17

18 18
19 19

20 20
21 21
FUNCIONES DE VARIAS VARIABLES Julián de la Horra Departamento de Matemáticas U.A.M.
 FUNCIONES DE VARIAS VARIABLES Julián de la Horra Departamento de Matemáticas U.A.M. 1 Introducción En las Ciencias Experimentales es muy recuente que tengamos interés en poder expresar una variable (variable
FUNCIONES DE VARIAS VARIABLES Julián de la Horra Departamento de Matemáticas U.A.M. 1 Introducción En las Ciencias Experimentales es muy recuente que tengamos interés en poder expresar una variable (variable
CURSO DE METODOS NUMERICOS SEGUN DA PART E SOLUCION APROXIMADA DE ECUACIONES DE UNA VARIABLE
 CURSO DE METODOS NUMERICOS SEGUN DA PART E SOLUCION APROXIMADA DE ECUACIONES DE UNA VARIABLE V. Muto Ecuaciones de una variable: Preliminares Cap. V CAPITULO V. SOLUCION APROXIMADA DE ECUACIONES DE UNA
CURSO DE METODOS NUMERICOS SEGUN DA PART E SOLUCION APROXIMADA DE ECUACIONES DE UNA VARIABLE V. Muto Ecuaciones de una variable: Preliminares Cap. V CAPITULO V. SOLUCION APROXIMADA DE ECUACIONES DE UNA
Repaso de funciones elementales, límites y continuidad
 Tema 3 Repaso de funciones elementales, ites y continuidad 3.1. Funciones. Definiciones básicas. Operaciones con funciones 3.1.1. Definiciones Una función real de (una) variable real es una aplicación
Tema 3 Repaso de funciones elementales, ites y continuidad 3.1. Funciones. Definiciones básicas. Operaciones con funciones 3.1.1. Definiciones Una función real de (una) variable real es una aplicación
CAPÍTULO 2 CÁLCULO DIFERENCIAL
 CAPÍTULO 2 CÁLCULO DIFERENCIAL 1. INTERROGANTES CENTRALES DEL CAPÍTULO Límite de una función Límites laterales Reglas para el cálculo de límites Regla del bocadillo Continuidad de una función Propiedades
CAPÍTULO 2 CÁLCULO DIFERENCIAL 1. INTERROGANTES CENTRALES DEL CAPÍTULO Límite de una función Límites laterales Reglas para el cálculo de límites Regla del bocadillo Continuidad de una función Propiedades
TEMA 5. PROCESOS ESTOCÁSTICOS
 TEMA 5. PROCESOS ESTOCÁSTICOS En el estudio de las variables aleatorias realizado hasta ahora se han explorado las características aleatorias del fenómeno pero se ha mantenido una premisa por defecto,
TEMA 5. PROCESOS ESTOCÁSTICOS En el estudio de las variables aleatorias realizado hasta ahora se han explorado las características aleatorias del fenómeno pero se ha mantenido una premisa por defecto,
Datos del autor. Nombres y apellido: Germán Andrés Paz. Lugar de nacimiento: Rosario (Código Postal 2000), Santa Fe, Argentina
, Santa Fe, Argentina") Datos del autor Nombres y apellido: Germán Andrés Paz Lugar de nacimiento: Rosario (Código Postal 2000), Santa Fe, Argentina Correo electrónico: germanpaz_ar@hotmail.com =========0========= Introducción
Datos del autor Nombres y apellido: Germán Andrés Paz Lugar de nacimiento: Rosario (Código Postal 2000), Santa Fe, Argentina Correo electrónico: germanpaz_ar@hotmail.com =========0========= Introducción
Apunte 2 - Procesamiento de señales
 Apunte 2 - Procesamiento de señales Este apunte está constituido por extractos de algunos textos sobre procesamiento de señales, principalmente, aunque no exclusivamente, el de Proakis y Manolakis. Para
Apunte 2 - Procesamiento de señales Este apunte está constituido por extractos de algunos textos sobre procesamiento de señales, principalmente, aunque no exclusivamente, el de Proakis y Manolakis. Para
8.1. Introducción... 1. 8.2. Dependencia/independencia estadística... 2. 8.3. Representación gráfica: diagrama de dispersión... 3. 8.4. Regresión...
 Tema 8 Análisis de dos variables: dependencia estadística y regresión Contenido 8.1. Introducción............................. 1 8.2. Dependencia/independencia estadística.............. 2 8.3. Representación
Tema 8 Análisis de dos variables: dependencia estadística y regresión Contenido 8.1. Introducción............................. 1 8.2. Dependencia/independencia estadística.............. 2 8.3. Representación
EL MOVIMIENTO ARMÓNICO SIMPLE
 1 EL MOVIMIENTO ARMÓNICO SIMPLE IDEAS PRINCIPALES Oscilaciones Movimiento periódico Movimiento armónico simple Péndulo simple Oscilaciones amortiguadas Oscilaciones forzadas Resonancia Análisis de Fourier
1 EL MOVIMIENTO ARMÓNICO SIMPLE IDEAS PRINCIPALES Oscilaciones Movimiento periódico Movimiento armónico simple Péndulo simple Oscilaciones amortiguadas Oscilaciones forzadas Resonancia Análisis de Fourier
INSTITUTO NACIONAL DE ESTADÍSTICA. La pobreza y su medición Presentación de diversos métodos de obtención de medidas de pobreza
 INSTITUTO NACIONAL DE ESTADÍSTICA La pobreza y su medición Presentación de diversos métodos de obtención de medidas de pobreza Índice 1. Introducción... 1 2. Los diferentes enfoques de la pobreza... 3
INSTITUTO NACIONAL DE ESTADÍSTICA La pobreza y su medición Presentación de diversos métodos de obtención de medidas de pobreza Índice 1. Introducción... 1 2. Los diferentes enfoques de la pobreza... 3
11 LÍMITES DE FUNCIONES. CONTINUIDAD
 LÍMITES DE FUNCIONES. CONTINUIDAD EJERCICIOS PROPUESTOS. A qué valor tiende la función f ()? 5 a) Cuando se acerca a. c) Cuando se acerca a. b) Cuando se aproima a 5. d) Cuando se aproima a. a) se aproima
LÍMITES DE FUNCIONES. CONTINUIDAD EJERCICIOS PROPUESTOS. A qué valor tiende la función f ()? 5 a) Cuando se acerca a. c) Cuando se acerca a. b) Cuando se aproima a 5. d) Cuando se aproima a. a) se aproima
www.fundibeq.org En estos casos, la herramienta Gráficos de Control por Variables" no es aplicable.
 GRAFICOS DE CONTROL POR ATRIBUTOS 1.- INTRODUCCIÓN Este documento describe la secuencia de construcción y las pautas de utilización de una de las herramientas para el control de procesos, los Gráficos
GRAFICOS DE CONTROL POR ATRIBUTOS 1.- INTRODUCCIÓN Este documento describe la secuencia de construcción y las pautas de utilización de una de las herramientas para el control de procesos, los Gráficos
FASE ESPECÍFICA MATEMÁTICAS MÓDULO EJERCICIOS PRUEBA PROGRAMACIÓN Y RECURSOS SOLUCIONARIO SOLUCIONARIO
 PRUEBA DE ACCESO A LA UNIVERSIDAD MAYORES DE 5 AÑOS FASE ESPECÍFICA MATEMÁTICAS MÓDULO EJERCICIOS SOLUCIONARIO PRUEBA PROGRAMACIÓN Y RECURSOS SOLUCIONARIO Acceso a la Universidad: mayores de 5 años Módulo
PRUEBA DE ACCESO A LA UNIVERSIDAD MAYORES DE 5 AÑOS FASE ESPECÍFICA MATEMÁTICAS MÓDULO EJERCICIOS SOLUCIONARIO PRUEBA PROGRAMACIÓN Y RECURSOS SOLUCIONARIO Acceso a la Universidad: mayores de 5 años Módulo
CAS (COMPUTER ALGEBRA SYSTEM) EN LA ENSEÑANZA Y APRENDIZAGE DEL CÁLCULO. ALGUNOS RESULTADOS DE INVESTIGACIÓN 2
 EN LA ENSEÑANZA Y APRENDIZAGE DEL CÁLCULO. ALGUNOS RESULTADOS DE INVESTIGACIÓN 2") CAS (COMPUTER ALGEBRA SYSTEM) EN LA ENSEÑANZA Y APRENDIZAGE DEL CÁLCULO. ALGUNOS RESULTADOS DE INVESTIGACIÓN 2 Matías Camacho Machín Departamento de Análisis Matemátic, Universidad de La Laguna mcamacho@ull.es
CAS (COMPUTER ALGEBRA SYSTEM) EN LA ENSEÑANZA Y APRENDIZAGE DEL CÁLCULO. ALGUNOS RESULTADOS DE INVESTIGACIÓN 2 Matías Camacho Machín Departamento de Análisis Matemátic, Universidad de La Laguna mcamacho@ull.es
4. ANÁLISIS DE LA BASE DE DATOS
 4. ANÁLISIS DE LA BASE DE DATOS En el apartado 3 del presente estudio Recopilación de casos y generación de una base de datos ya se describen el planteamiento y creación de la base de datos. En este apartado
4. ANÁLISIS DE LA BASE DE DATOS En el apartado 3 del presente estudio Recopilación de casos y generación de una base de datos ya se describen el planteamiento y creación de la base de datos. En este apartado
SISTEMAS DE ECUACIONES LINEALES
 Capítulo 7 SISTEMAS DE ECUACIONES LINEALES 7.1. Introducción Se denomina ecuación lineal a aquella que tiene la forma de un polinomio de primer grado, es decir, las incógnitas no están elevadas a potencias,
Capítulo 7 SISTEMAS DE ECUACIONES LINEALES 7.1. Introducción Se denomina ecuación lineal a aquella que tiene la forma de un polinomio de primer grado, es decir, las incógnitas no están elevadas a potencias,
Capítulo 19 Análisis no paramétrico: El procedimiento Pruebas no paramétricas
 Capítulo 19 Análisis no paramétrico: El procedimiento Pruebas no paramétricas En los capítulos 13 al 18 hemos estudiado una serie de procedimientos estadísticos diseñados para analizar variables cuantitativas:
Capítulo 19 Análisis no paramétrico: El procedimiento Pruebas no paramétricas En los capítulos 13 al 18 hemos estudiado una serie de procedimientos estadísticos diseñados para analizar variables cuantitativas:
Botella-Rocamora, P.; Alacreu-García, M.; Martínez-Beneito, M.A.;
 Inferencia estadística (intervalos de confianza y p-valor). Comparación de dos poblaciones (test t de comparación de medias, comparación de dos proporciones, comparación de dos varianzas). Botella-Rocamora,
Inferencia estadística (intervalos de confianza y p-valor). Comparación de dos poblaciones (test t de comparación de medias, comparación de dos proporciones, comparación de dos varianzas). Botella-Rocamora,
Estadística con Excel Informática 4º ESO ESTADÍSTICA CON EXCEL
 1. Introducción ESTADÍSTICA CO EXCEL La estadística es la rama de las matemáticas que se dedica al análisis e interpretación de series de datos, generando unos resultados que se utilizan básicamente en
1. Introducción ESTADÍSTICA CO EXCEL La estadística es la rama de las matemáticas que se dedica al análisis e interpretación de series de datos, generando unos resultados que se utilizan básicamente en
Estudio de ceros de ecuaciones funcionales
 Capítulo 1 Estudio de ceros de ecuaciones funcionales Problema 1.1 Calcular el número de ceros de la ecuación arctang(x) = 4 x, dando un intervalo 5 donde se localicen. Solución: Denimos f(x) = arctan(x)
Capítulo 1 Estudio de ceros de ecuaciones funcionales Problema 1.1 Calcular el número de ceros de la ecuación arctang(x) = 4 x, dando un intervalo 5 donde se localicen. Solución: Denimos f(x) = arctan(x)
Funciones sin primitiva elemental
 Funciones sin primitiva elemental Carlos Ivorra (http://www.uv.es/ivorra) 1 Introducción La función de densidad de la distribución normal (con media 0 y desviación típica 1) viene dada por la función f(t)
Funciones sin primitiva elemental Carlos Ivorra (http://www.uv.es/ivorra) 1 Introducción La función de densidad de la distribución normal (con media 0 y desviación típica 1) viene dada por la función f(t)
Cómo hacer una Regresión Logística con SPSS paso a paso. (I)
") DOCUWEB FABIS Dot. Núm 070202 Cómo hacer una Regresión Logística con SPSS paso a paso. (I) Aguayo Canela, Mariano. Servicio de Medicina Interna. Hospital Universitario Virgen Macarena. Sevilla Resumen
DOCUWEB FABIS Dot. Núm 070202 Cómo hacer una Regresión Logística con SPSS paso a paso. (I) Aguayo Canela, Mariano. Servicio de Medicina Interna. Hospital Universitario Virgen Macarena. Sevilla Resumen
Carlos Ivorra ANÁLISIS NO
 Carlos Ivorra ANÁLISIS NO ESTÁNDAR Si una cantidad no negativa fuera tan pequeña que resultara menor que cualquier otra dada, ciertamente no podría ser sino cero. A quienes preguntan qué es una cantidad
Carlos Ivorra ANÁLISIS NO ESTÁNDAR Si una cantidad no negativa fuera tan pequeña que resultara menor que cualquier otra dada, ciertamente no podría ser sino cero. A quienes preguntan qué es una cantidad
LA MEDICIÓN DE LA POBREZA
 LA MEDICIÓN DE LA POBREZA Carlos Gradín y Coral del Río Universidade de Vigo Octubre, 2001 1 Estas notas están basadas en el Capítulos 5 del libro Desigualdad, Polarización y Pobreza en la Distribución
LA MEDICIÓN DE LA POBREZA Carlos Gradín y Coral del Río Universidade de Vigo Octubre, 2001 1 Estas notas están basadas en el Capítulos 5 del libro Desigualdad, Polarización y Pobreza en la Distribución
EL ESTADO DE LA POBREZA
 EL ESTADO DE LA POBREZA 4º INFORME Seguimiento del indicador de riesgo de pobreza y exclusión social en España 2009-2013 EAPN-ESPAÑA Enero de 2015 Juan Carlos Llano Ortiz EAPN-ESPAÑA 1 2 Contenido OBJETIVOS
EL ESTADO DE LA POBREZA 4º INFORME Seguimiento del indicador de riesgo de pobreza y exclusión social en España 2009-2013 EAPN-ESPAÑA Enero de 2015 Juan Carlos Llano Ortiz EAPN-ESPAÑA 1 2 Contenido OBJETIVOS
(x y) : Par Ordenado (PO) x : Primer elemento del PO (Primera componente del PO) y : Segundo elemento del PO (Segunda componente del PO)
 : Par Ordenado (PO) x : Primer elemento del PO (Primera componente del PO) y : Segundo elemento del PO (Segunda componente del PO)") 5.- CONJUNTOS 5.1.- PAR ORDENADO (PO) 5.1.1.- DEFINICIÓN DE PO Se llama Par Ordenado o dupla cuyo símbolo es (x y) al conjunto cuyos elementos son a su vez otros dos conjuntos : 1.- el conjunto {x y} que
5.- CONJUNTOS 5.1.- PAR ORDENADO (PO) 5.1.1.- DEFINICIÓN DE PO Se llama Par Ordenado o dupla cuyo símbolo es (x y) al conjunto cuyos elementos son a su vez otros dos conjuntos : 1.- el conjunto {x y} que
Estacionalidad. Series de tiempo. Modelos econométricos. Modelos econométricos. Q= T Kα Lβ
 Estacionalidad Qué es la estacionalidad? La estacionalidad es una componente que se presenta en series de frecuencia inferior a la anual (mensual, trimestral,...), y supone oscilaciones a corto plazo de
Estacionalidad Qué es la estacionalidad? La estacionalidad es una componente que se presenta en series de frecuencia inferior a la anual (mensual, trimestral,...), y supone oscilaciones a corto plazo de
Repaso de Cinética química 7.51 Septiembre, 2001
 Repaso de Cinética química 7.51 Septiembre, 2001 Los experimentos cinéticos estudian la velocidad a la que se producen las reacciones, es decir, el modo en el que la concentración de algunas especies moleculares
Repaso de Cinética química 7.51 Septiembre, 2001 Los experimentos cinéticos estudian la velocidad a la que se producen las reacciones, es decir, el modo en el que la concentración de algunas especies moleculares
372.7 And. Sustracción Federación Internacional Fe y Alegría, 2005. 30 p.; 21,5 x 19 cm. ISBN: 980-6418-70-0 Matemáticas, sustracción.
 2 372.7 And. Sustracción Federación Internacional Fe y Alegría, 2005. 30 p.; 21,5 x 19 cm. ISBN: 9806418700 Matemáticas, sustracción. Los alumnos llegan a las clases con un saber constituido como resultado
2 372.7 And. Sustracción Federación Internacional Fe y Alegría, 2005. 30 p.; 21,5 x 19 cm. ISBN: 9806418700 Matemáticas, sustracción. Los alumnos llegan a las clases con un saber constituido como resultado
Modelo ER Jos e Ram on Param a Gab ıa
 Modelo ER José Ramón Paramá Gabía ii ÍNDICE GENERAL Índice general 1. Modelo Entidad-Relación 1 1.1. Diseño de bases de datos.............................. 1 1.2. Ejemplo guía....................................
Modelo ER José Ramón Paramá Gabía ii ÍNDICE GENERAL Índice general 1. Modelo Entidad-Relación 1 1.1. Diseño de bases de datos.............................. 1 1.2. Ejemplo guía....................................