4. PROPIEDAD DE ÁREAS PLANAS Y LINEAS Centroides de áreas compuestas
|
|
|
- Belén Valenzuela Montes
- hace 6 años
- Vistas:
Transcripción

1 4. PROPIEDAD DE ÁREAS PLANAS Y LINEAS 4.1. Centroides de áreas compuestas Centros de gravedad de un cuerpo bidimensional Para iniciar, considere una placa plana horizontal (figura 5.1). La placa puede dividirse en n elementos pequeños. Las coordenadas del primer elemento se representan con x1 y y1, las del segundo elemento se representan con x2 y y2, etcétera. Las fuerzas ejercidas por la Tierra sobre los elementos de la placa serán representadas, respectivamente, con _W1, _W2,..., _Wn. Estas fuerzas o pesos están dirigidos hacia el centro de la Tierra; sin embargo, para todos los propósitos prácticos, se puede suponer que dichas fuerzas son paralelas. Por tanto, su resultante es una sola fuerza en la misma dirección. La magnitud W de esta fuerza se obtiene a partir de la suma de las magnitudes de los pesos de los elementos. para obtener las coordenadas x_ y y_ del punto G, donde debe aplicarse la resultante W, se escribe que los momentos de W con respecto a los ejes y y x son iguales a la suma de los momentos correspondientes de los pesos elementales, esto es
2 Si ahora se incrementa el número de elementos en los cuales se ha dividido la placa y simultáneamente se disminuye el tamaño de cada elemento se obtienen, en el límite, las siguientes expresiones: Estas ecuaciones definen el peso W y las coordenadas x_ y y_ del centro de gravedad G de una placa plana. Se pueden derivar las mismas ecuaciones para un alambre que se encuentra en el plano xy (figura 5.2). Se observa que usualmente el centro de gravedad G de un alambre no está localizado sobre este último Centros de gravedad de áreas y líneas En el caso de una placa plana homogénea de espesor uniforme, la magnitud ʌw del pcso de un elemento de la placa puede expresarse como
3 En forma similar, se puede expresar la magnitud W del peso de toda la placa como donde A es el área total de la placa. Si se emplean las unidades de uso común en Estados Unidos, se debe expresar el peso específıco µen lb/ft3, el espesor t en pies y las áreas A y A en pies cuadrados. Entonces, se observa que W y W estarán expresados en libras. Si se usan las unidades del SI, se debe expresar a µ en N/m3, a t en metros y a las áreas A y A en metros cuadrados; entonces, los pesos W y W estarán expresados en newtons. Si se sustituye a W y a W en las ecuaciones de momento (5.1) y se divide a todos los términos entre t, se obtiene Si se incrementa el número de elementos en los cuales se divide el área A y simultáneamente se disminuye el tamaño de cada elemento, se obtiene en el límite Estas ecuaciones definen las coordenadas x y y del centro de gravedad de una placa homogénea. El punto cuyas coordenadas son x_ y y_ también se conoce como el centroide C del área A de la placa (figura 5.3). Si la placa no es homogénea, estas ecuaciones no se pueden utilizar para determinar el centro de gravedad de la placa; sin embargo, éstas aún definen al centroide del área. En el caso de un alambre homogéneo de sección transversal uniforme, la magnitud W del peso de un elemento de alambre puede expresarse como Se debe señalar que en el Sistema Internacional de unidades generalmente se caracteriza a un material dado por su densidad _ (masa por unidad de volumen) en lugar de caracterizarlo por su peso específico _. Entones, el peso específico del material se puede obtener a partir de la relación

4 El centro de gravedad de un alambre coincide con el centroide C de la línea L que define la forma del alambre (figura 5.4). Las coordenadas x y y del centroide de la línea L se obtienen a partir de las ecuaciones 5.4. PRIMEROS MOMENTOS DE ÁREAS Y LÍNEAS La integral _ x da en las ecuaciones (5.3) de la sección anterior se conoce como el primer momento del área A con respecto al eje y y se representa con Qy. En forma similar, la integral _ y da define el primer momento de A con respecto al eje x y se representa con Qx. Así se escribe
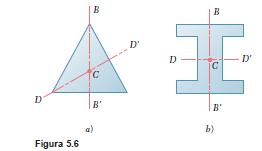
5 Si comparamos las ecuaciones (5.3) con las ecuaciones (5.5), se observa que los primeros momentos del área A pueden ser expresados como los productos del área con las coordenadas de su centroide: A partir de las ecuaciones (5.6) se concluye que las coordenadas del centroide de un área pueden obtenerse al dividir los primeros momentos de dicha área entre el área misma. Los primeros momentos de un área también son útiles en la mecánica de materiales para determinar los esfuerzos de corte en vigas sujetas a cargas transversales. Por último, a partir de las ecuaciones (5.6) se observa que si el centroide de un área está localizado sobre un eje coordenado, entonces el primer momento del área con respecto a ese eje es igual a cero. De manera inversa, si el primer momento de un área con respecto a un eje coordenado es igual a cero, entonces el centroide del área está localizado sobre ese eje. Se pueden utilizar relaciones similares a partir de las ecuaciones (5.5) y (5.6) para definir los primeros momentos de una línea con respecto a los ejes coordenados y para expresar dichos momentos como los productos de la longitud L de la línea y las coordenadas x_ y y_ de su centroide. Se dice que un área A es simétrica con respecto a un eje BB_ si para todo punto P del área existe un punto P_ de esa misma área tal que la línea PP_ sea perpendicular a BB_ y dicha línea está dividida en dos partes iguales por el eje en cuestión (fıgura 5.5a). Se dice que una línea L es simétrica con respecto a un eje BB_ si satisface condiciones similares. Cuando un área A o una línea L posee un eje de simetría BB_, su primer momento con respecto a BB_ es igual a cero y su centroide está localizado sobre dicho eje. Por ejemplo, en el caso del área A de la figura 5.5b, la cual es simétriaca con respecto al eje y, se observa que para cada elemento de área da de abscisa x existe un elemento de área da_ que tiene la misma superficie y cuya abscisa es _x. Se concluye que la integral en la primera de las ecuaciones (5.5) es igual a cero y, por tanto, se tiene que Qy _ 0. También se concluye a partir de la primera de las relaciones (5.3) que x 0. Por consiguiente, si un área A o una línea L poseen un eje de simetría, su centroide C está localizado sobre dicho eje. Además, se debe señalar que si un área o una línea posee dos ejes de simetría, su centroide C debe estar localizado en la intersección de esos dos ejes (figura 5.6). Esta propiedad permite determinar de inmediato el centroide de áreas como círculos, elipses, cuadrados, rectángulos, triángulos equiláteros u otras figuras simétricas, así como el centroide de líneas que tienen la forma de la circunferencia de un círculo, el perímetro de un cuadrado, entre otros.

6 Figura 5.7 Figura 5.5
. Entonces, se concluye que ambas integrales en las ecuaciones (5.5) son iguales a cero y que Qx _ Qy _ 0. También, a partir de las ecuaciones (5.")
7 Se dice que un área A es simétrica con respecto a un centro O si para cada elemento de área da de coordenadas x y y existe un elemento de área da_ de igual superficie con coordenadas _x y _y (figura 5.7). Entonces, se concluye que ambas integrales en las ecuaciones (5.5) son iguales a cero y que Qx _ Qy _ 0. También, a partir de las ecuaciones (5.3), se concluye que x y 0, esto es, que el centroide del área coincide con su centro de simetría O. En forma análoga, si una línea posee un centro de simetría O, el centroide de la línea coincidirá con el centro O. Se debe señalar que una figura con un centro de simetría no necesariamente posee un eje de simetría (figura 5.7) y que una figura con dos ejes de simetría no necesariamente tiene un centro de simetría (figura 5.6a). Sin embargo, si una figura posee dos ejes de simetría que son perpendiculares entre sí, el punto de intersección de dichos ejes es un centro de simetría (figura 5.6b). La determinación de los centroides de áreas asimétricas y de líneas y áreas que poseen un solo eje de simetría se estudiará en las secciones 5.6 y 5.7. En las figuras 5.8A y 5.8B se muestran los centroides de formas comunes de áreas y de líneas.
8 Placas y alambres compuestos



9 o en forma condensada Estas ecuaciones se pueden resolver para las coordenadas X_ y Y_ del centro de gravedad de la placa.
10 Si la placa es homogénea y de espesor uniforme, el centro de gravedad coincide con el centroide C de su área. La abscisa X_ del centroide del área puede determinarse observando que el primer momento Qy del área compuesta con respecto al eje y puede expresarse como el producto de X_ con el área total y como la suma de los primeros momentos de las áreas elementales con respecto al eje y (figura 5.10). La ordenada Y_ del centroide se encuentra de forma similar, considerando el primer momento Qx del área compuesta. Así, se tiene Estas ecuaciones proporcionan los primeros momentos del área compuesta o pueden utilizarse para obtener las coordenadas X_ y Y_ de su centroide. Se debe tener cuidado de asignarle el signo apropiado al momento de cada área. Los primeros momentos de áreas, al igual que los momentos de las fuerzas, pueden ser positivos o negativos. Por ejemplo, un área cuyo centroide está localizado a la izquierda del eje y tendrá un primer momento negativo con respecto a dicho eje. Además al área de un agujero se le debe asignar un signo negativo (fıgura 5.11). De manera similar, en muchos casos es posible determinar el centro de gravedad de un alambre compuesto o el centroide de una línea compuesta dividiendo al alambre o a la línea en elementos más simples (véase problema resuelto 5.2).

11
12 Determinación de centros de gravedad por integración
13

14
15

16
17 4.2. Momento de primer orden por integración


18

19
 Calcular los momentos principales de inercia en el punto O. a O b R x c) Calcular el ángulo que forman los ejes principales de inercia OUV con los ejes OXY.")
20 4.3. Momento de segundo orden por áreas simples Para el perfil que se muestra en la figura, cuyas dimensiones son y a = 100 mm, b = 180 mm y R = 240 mm, a) Calcular los momentos de segundo orden I x, I y e I xy. b) Calcular los momentos principales de inercia en el punto O. a O b R x c) Calcular el ángulo que forman los ejes principales de inercia OUV con los ejes OXY. Dibujar los ejes principales de inercia. a) Para calcular los momentos de segundo orden de la superficie completa consideramos las mismas figuras que en el ejemplo anterior y buscamos sus momentos en las tablas. Dado que las cantidades en mm 4 serían muy grandes, pasaremos las unidades a cm. y R a O x Los momentos de segundo orden del triángulo son: I x1 = ar 3 /12 = (10 cm) x (24 cm) 3 / 12 = cm 4 I y1 = Ra 3 /12 = (24 cm) x (10 cm) 3 / 12 = 2000 cm 4 I xy1 = a 2 R 2 /24 = (10 cm) 2 x (24 cm) 2 / 24 = 2400 cm 4 y Los momentos de segundo orden del rectángulo son:
 4 / 16 = 65144.")
 (4R 4 /9π) = (π x (24 cm) 4 /16) (4 x (24 cm) 4 / 9π) = 18207.37 cm 4 Para aplicar el teorema de Steiner usamos los datos del ejemplo anterior, x CM3 = 281.")
21 O b x I x2 = br 3 /3 = (18 cm) x (24 cm) 3 / 3 = cm 4 R I y2 = Rb 3 /3 = (24 cm) x (18 cm) 3 / 3 = cm 4 I xy2 = b 2 R 2 /4 = (18 cm) 2 x (24 cm) 2 / 4 = cm 4 Los momentos de segundo orden del sector y yc circular son: O R x xc I x3 = πr 4 /16 = π x (24 cm) 4 / 16 = cm 4 Para calcular el momento de segundo orden con respecto al eje y, tenemos que buscar en las tablas el correspondiente a un eje que pase por el centro de masas y después hay que aplicar el teorema de Steiner. I yc3 = (πr 4 /16) (4R 4 /9π) = (π x (24 cm) 4 /16) (4 x (24 cm) 4 / 9π) = cm 4 Para aplicar el teorema de Steiner usamos los datos del ejemplo anterior, x CM3 = mm = cm y CM3 = mm = cm A 3 = mm 2 = cm 2 I y3 = I yc3 + (x CM3 ) 2 A 3 = = cm 4 + ( cm) 2 x ( cm 2 ) = cm 4 Para calcular el momento mixto de segundo orden, tenemos que proceder de la misma forma. I xyc3 = (9π 32)R 4 /72π = (9π 32) x (24 cm) 4 / 72π = cm 4 Ixy3 = Ixyc3 + xcm3 ycm3 A3 = = cm 4 + ( cm) x ( cm) x ( cm 2 ) = cm 4 Los momentos de segundo orden de la superficie completa serán la suma de los correspondientes a cada parte, I x = I x1 + I x2 + I x3 = (11520 cm 4 ) + (82944 cm 4 ) + ( cm 4 ) = cm 4 I y = I y1 + I y2 + I y3 = (2000 cm 4 ) + (46656 cm 4 ) + ( cm 4 ) = cm 4 Ixy = Ixy1 + Ixy2 + Ixy3 = = ( 2400 cm 4 ) + (46656 cm 4 ) + ( cm 4 ) = cm 4 b) Para calcular los momentos principales de inercia utilizamos las expresiones correspondientes: I R = (I x I y )/2 = ( cm cm 4 ) / 2 = cm 4 I S = (I x + I y )/2 = ( cm cm 4 ) / 2 = cm 4 I max = I S + [(I R ) 2 + (I xy ) 2 ] 1/2 =
![= 292936.08 cm 4 + [( 133328.01 cm 4 ) 2 + (168673.36 cm 4 ) 2 ] 1/2 = 507940.87 cm 4 I min = I S [(I R ) 2 + (I xy ) 2 ] 1/2 = = 292936.08 cm 4 [( 133328.01 cm 4 ) 2 + (168673.36 cm 4 ) 2 ] 1/2 = 77931.](/docs-images/63/49725235/images/22-0.jpg "29 cm 4 c) Y el ángulo que forman los ejes principales con los ejes dados, es 2θ p = tg -1 ( I xy / I R ) = tg -1 ( 168673.36 / 133328.01) = 51.675º θ p = (51.675º) / 2 = 25.")
22 = cm 4 + [( cm 4 ) 2 + ( cm 4 ) 2 ] 1/2 = cm 4 I min = I S [(I R ) 2 + (I xy ) 2 ] 1/2 = = cm 4 [( cm 4 ) 2 + ( cm 4 ) 2 ] 1/2 = cm 4 c) Y el ángulo que forman los ejes principales con los ejes dados, es 2θ p = tg -1 ( I xy / I R ) = tg -1 ( / ) = º θ p = (51.675º) / 2 = º v y u a O b R x Para comprobar si el eje u que forma un ángulo de º con el eje x corresponde al eje principal de momento máximo o mínimo, podemos usar otra de las expresiones: I x' = I S + I R cos 2θ p I xy sen 2θ p = = ( ) cos(51.675º) ( ) sen (51.675º) = = cm 4 Que corresponde al valor de I min. Podríamos haber calculado los momentos principales mediante esta expresión en lugar de las otras. Para encontrar el otro momento principal bastaría sustituir en la última expresión el ángulo correspondiente al otro eje: θ p + 90º = º. Para el perfil que se muestra en la figura, sabiendo que R mide 0.5 m, calcular los momentos de segundo orden, I u, I v e I uv, respecto a los y ejes Auv. A R u Para calcular los momentos de segundo orden de la superficie, consideramos las dos figuras que se O x encuentran en las tablas: un cuadrado y un cuarto de v círculo. Podemos calcular los momentos de segundo orden de cada una de estas figuras con respecto a los ejes Auv (mediante el teorema de Steiner) y restarlos después para obtener los momentos de la superficie del problema. De una forma más sencilla, podemos calcular los momentos de la superficie con respecto a los ejes Oxy y aplicar después el teorema de Steiner para encontrar los momentos con respecto a los ejes Auv.
 4 / 4 = 0.01563 m 4 y O x Los momentos de segundo orden del sector circular son: I x2 = πr 4 /16 = π x (0.5 m) 4 / 16 = 0.01227 m 4 I y2 = πr 4 /16 = π x (0.5 m) 4 / 16 = 0.01227 m 4 4 4 4 I xy2 = R /8 = (0.")
23 Los momentos de segundo orden del cuadrado, con respecto a los ejes Oxy son: y O x I x1 = RR /3 = (0.5 m) / 3 = m I y1 = R 3 R/3 = (0.5 m) 4 / 3 = m 4 I xy1 = R 2 R 2 /4 = (0.5 m) 4 / 4 = m 4 y O x Los momentos de segundo orden del sector circular son: I x2 = πr 4 /16 = π x (0.5 m) 4 / 16 = m 4 I y2 = πr 4 /16 = π x (0.5 m) 4 / 16 = m I xy2 = R /8 = (0.5 m) / 8 = m Dada la simetría de las figuras, encontramos Ix1 = Iy1 y también I x2 = I y2, por lo que I x = I y, como era de esperar. Los momentos de segundo orden de la superficie completa respecto a los ejes Oxy, serán la diferencia entre los correspondientes a cada parte, I x = I y = I x1 I x2 = ( m 4 ) ( m 4 ) = m 4 I xy = I xy1 I xy2 = ( m 4 ) ( m 4 ) = m 4 Ahora tenemos que aplicar el teorema de Steiner para encontrar los momentos con respecto a los ejes Auv. Para ello necesitamos las coordenadas del centro de masas de la superficie problema con respecto a los y yc nuevos ejes Auv. Podemos obtener A u fácilmente este dato a partir de sus coordenadas con respecto a los ejes Oxy xc calculadas en un problema anterior (problema 1.3). x En el sistema Oxy, x G = y G = m. O x G Las coordenadas de este punto en el sistema Auv serán: v u G = (R x G ) = ( ) = m v G = R x G = = m La coordenada v G es positiva porque la flecha del eje indica que se toma hacia abajo el sentido positivo en este sistema de referencia. También necesitaremos el area de la superficie, calculada en el problema 1.3. A = m 2. Finalmente, aplicamos el teorema de Steiner. Primero una vez para ir a un sistema que pase por el centro de masas y después otra para ir al sistema Auv. I x = I xc + (y G ) 2 A I xc = I x (y G ) 2 A = ( x 0.054) = x 10-4 m 4

 x 0.054) = 4.22 x 10-4 m 4 Obviamente, dada la simetría de la superficie, volvemos a encontrar I u = I v. Para el perfil que se muestra en la figura, donde la longitud L mide 1.")
24 I y = I yc + (x G ) 2 A I yc = I y (x G ) 2 A = ( x 0.054) = x 10-4 m 4 I xy = I xyc + x G y G A I xyc = I xy x G y G A = = (0.387 x x 0.054) = x 10-4 m 4 Ya podemos pasar al sistema Auv. Debemos tener en cuenta que hay que cambiar el signo de I xyc porque el eje v tiene definido el sentido positivo de forma opuesta al eje yc. I u = I xc + (v G ) 2 A = x ( x 0.054) = m 4 I v = I yc + (u G ) 2 A = x ( x 0.054) = m 4 I uv = I xyc + u G v G A = ( x 10-4 ) + (0.113 x ( 0.113) x 0.054) = 4.22 x 10-4 m 4 Obviamente, dada la simetría de la superficie, volvemos a encontrar I u = I v. Para el perfil que se muestra en la figura, donde la longitud L mide 1.5 m, a) Calcular los momentos de segundo orden I x, I y e y I xy. b) Calcular los momentos principales de inercia en el L punto O. c) Dibujar el círculo de Mohr correspondiente. L O L L x a) Para calcular los momentos de segundo orden de la superficie completa consideramos tres figuras: un rectángulo, un cuarto de círculo y un triángulo, y buscamos sus momentos en las tablas. Los momentos de segundo orden del rectángulo son: I x1 = 2L(L) 3 /3 = 2 x (1.5 m) 4 / 3 = m 4 I y1 = L(2L) 3 /3 = 8 x (1.5 m) 4 / 3 = 13.5 m 4 I xy1 = (2L) 2 (L) 2 /4 = 4 x (1.5 m) 4 / 4 = m 4 Los momentos de segundo orden del sector circular son:
25 I x2 = π(l) 4 /16 = π x (1.5 m) 4 / 16 = m 4 I y2 = π(l) 4 /16 = π x (1.5 m) 4 / 16 = m 4 I xy2 = (L) 4 /8 = (1.5 m) 4 / 8 = m 4 Los momentos de segundo orden del triángulo son: Para calcular el momento de segundo orden con respecto al eje x, tenemos que buscar en las tablas el correspondiente a un eje que pase por el centro de masas, xc. I xc3 = 2L(L) 3 /36 = 2 x (1.5 m) 4 / 36 = m 4 Para aplicar el teorema de Steiner necesitamos las coordenadas del centro de masas y el area del triángulo I x3 = I xc3 + (y G3 ) 2 A 3 = (0.281 m 4 ) + (2 m) 2 x (2.25 m 2 ) = m 4 Para calcular el momento de segundo orden con respecto al eje y, no es necesario aplicar Steiner, sino la expresión de las tablas, directamente. I y3 = L(2L) 3 /12 = 8 x (1.5 m) 4 / 12 = m 4 Para calcular el momento mixto de segundo orden, volvemos a proceder de la misma forma. I xyc3 = (2L) 2 (L) 2 /72 = 4 x (1.5 m) 4 / 72 = m 4 I xy3 = I xyc3 + x G3 y G3 A 3 = ( m 4 ) + (1 m) x (2 m) x (2.25 m 2 ) = m 4 Los momentos de segundo orden de la superficie completa se obtienen sumando los correspondientes al rectángulo y el triángulo y restando los del cuarto de círculo,
26 I x = I x1 I x2 + I x3 = (3.375 m 4 ) (0.994 m 4 ) + (9.281 m 4 ) = m 4 I y = I y1 I y2 + I y3 = (13.5 m 4 ) (0.994 m 4 ) + (3.375 m 4 ) = m 4 I xy = I xy1 I xy2 + I xy3 = (5.063 m 4 ) (0.633 m 4 ) + (4.219 m 4 ) = m 4 b) Para calcular los momentos principales de inercia utilizamos las expresiones correspondientes: I R = (I x I y )/2 = ( m m 4 ) / 2 = m 4 I S = (I x + I y )/2 = ( m m 4 ) / 2 = m 4 I max = I S + [(I R ) 2 + (I xy ) 2 ] 1/2 = (13.772) + [( 2.110) 2 + (8.649) 2 ] 1/2 = m 4 I min = I S [(I R ) 2 + (I xy ) 2 ] 1/2 = (13.772) [( 2.110) 2 + (8.649) 2 ] 1/2 = m 4 Y el ángulo que forman los ejes principales con los ejes dados, es θ p = (1/2) tg -1 ( I xy / I R ) = (1/2) tg -1 ( / 2.110) = 38.14º c) Para dibujar el círculo de Mohr, sólo necesitamos los valores de I x, I y e I xy. Seguiremos los siguientes pasos: Trazamos un sistema de ejes y ponemos las escalas correspondientes a los momentos I x, I y en el eje de abscisas e I xy en el eje de ordenadas. I xy (m 4 ) I x, I y (m 4 ) -10 Representamos los puntos A (I x, I xy ) y B (I y, I xy ), que en este caso corresponden a A (11.662, 8.649) y B (15.881, 8.649). A continuación unimos estos dos puntos mediante una linea recta. El punto de esta linea que corta el eje de abscisas será el centro del círculo de Mohr (C).
27 I xy (m 4 ) 10 A I x, I y (m 4 ) C -10 B Trazamos un círculo con centro en el punto C y con la distancia AC como radio. I xy (m 4 ) 10 A C 20 I x, I y (m 4 ) -10 B Este círculo corta el eje de abscisas en dos puntos. El más próximo al origen corresponde al momento mínimo, I min, y el más lejano al momento máximo, I max. Para conocer sus valores, gráficamente, bastará con leer su valor en las escalas graduadas de los ejes.
28 I xy (m 4 ) Imin Imax I x, I y (m 4 ) -10 Para este caso, podemos ver que I min 5 m 4 e I max 22.8 m 4, en buen acuerdo con los valores obtenidos matemáticamente I min = m 4 e I max = m 4
29
Inecuaciones: Actividades de recuperación.
 Inecuaciones: Actividades de recuperación. 1.- Escribe la inecuación que corresponde a los siguientes enunciados: a) El perímetro de un triángulo equilátero es menor que 4. (x = lado del triángulo) b)
Inecuaciones: Actividades de recuperación. 1.- Escribe la inecuación que corresponde a los siguientes enunciados: a) El perímetro de un triángulo equilátero es menor que 4. (x = lado del triángulo) b)
Centro de gravedad de un cuerpo bidimensional
 Centro de gravedad de un cuerpo bidimensional Al sumar las fuerzas en la dirección z vertical y los momentos alrededor de los ejes horizontales y y x, Aumentando el número de elementos en que está dividida
Centro de gravedad de un cuerpo bidimensional Al sumar las fuerzas en la dirección z vertical y los momentos alrededor de los ejes horizontales y y x, Aumentando el número de elementos en que está dividida
Unidad 3: Razones trigonométricas.
 Unidad 3: Razones trigonométricas 1 Unidad 3: Razones trigonométricas. 1.- Medida de ángulos: grados y radianes. Las unidades de medida de ángulos más usuales son el grado sexagesimal y el radián. Se define
Unidad 3: Razones trigonométricas 1 Unidad 3: Razones trigonométricas. 1.- Medida de ángulos: grados y radianes. Las unidades de medida de ángulos más usuales son el grado sexagesimal y el radián. Se define
Aplicación: cálculo de áreas XII APLICACIÓN: CÁLCULO DE ÁREAS
 XII APLICACIÓN: CÁLCULO DE ÁREAS El estudiante, hasta este momento de sus estudios, está familiarizado con el cálculo de áreas de figuras geométricas regulares a través del uso de fórmulas, como el cuadrado,
XII APLICACIÓN: CÁLCULO DE ÁREAS El estudiante, hasta este momento de sus estudios, está familiarizado con el cálculo de áreas de figuras geométricas regulares a través del uso de fórmulas, como el cuadrado,
UNIDAD IV DISTANCIA ENTRE DOS PUNTOS
 UNIDAD IV DISTANCIA ENTRE DOS PUNTOS Dados los puntos: P(x1, y1) y Q(x2, y2), del plano, hallemos la distancia entre P y Q. Sin pérdida de generalidad, tomemos los puntos P y Q, en el primer cuadrante
UNIDAD IV DISTANCIA ENTRE DOS PUNTOS Dados los puntos: P(x1, y1) y Q(x2, y2), del plano, hallemos la distancia entre P y Q. Sin pérdida de generalidad, tomemos los puntos P y Q, en el primer cuadrante
ACTIVIDADES SELECTIVIDAD APLICACIONES DERIVADAS
 ACTIVIDADES SELECTIVIDAD APLICACIONES DERIVADAS Ejercicio 1 De la función se sabe que tiene un máximo en, y que su gráfica corta al eje OX en el punto de abscisa y tiene un punto de inflexión en el punto
ACTIVIDADES SELECTIVIDAD APLICACIONES DERIVADAS Ejercicio 1 De la función se sabe que tiene un máximo en, y que su gráfica corta al eje OX en el punto de abscisa y tiene un punto de inflexión en el punto
DISTANCIA ENTRE DOS PUNTOS EN EL PLANO CARTESIANO.
 RAZONAMIENTO Y DEMOSTRACIÓN Determina la distancia entre pares de puntos. Calcula las coordenadas del punto medio del segmento cuyos extremos son dos puntos dados. Halla la pendiente de una recta. COMUNICACIÓN
RAZONAMIENTO Y DEMOSTRACIÓN Determina la distancia entre pares de puntos. Calcula las coordenadas del punto medio del segmento cuyos extremos son dos puntos dados. Halla la pendiente de una recta. COMUNICACIÓN
Vectores y rectas. 4º curso de E.S.O., opción B. Modelo de examen (ficticio)
") demattematicaswordpresscom Vectores y rectas º curso de ESO, opción B Modelo de examen (ficticio) Sean los vectores u = (,5) y v = (, ) a) Analiza si tienen la misma dirección No tienen la misma dirección
demattematicaswordpresscom Vectores y rectas º curso de ESO, opción B Modelo de examen (ficticio) Sean los vectores u = (,5) y v = (, ) a) Analiza si tienen la misma dirección No tienen la misma dirección
2.2 Rectas en el plano
 2.2 Al igual que ocurre con el punto, en geometría intrínseca, el concepto de recta no tiene definición, sino que constituye otro de sus conceptos iniciales, indefinibles. Desde luego se trata de un conjunto
2.2 Al igual que ocurre con el punto, en geometría intrínseca, el concepto de recta no tiene definición, sino que constituye otro de sus conceptos iniciales, indefinibles. Desde luego se trata de un conjunto
*SIMETRAL DE UN TRAZO.: perpendicular en el punto medio.
 *DISTANCIA ENTRE DOS PUNTOS EN EL PLANO: P(x a, y b ). Q(x a, y b ) 2 b + ya yb d= ( ) ( ) 2 x a x *SIMETRAL DE UN TRAZO.: perpendicular en el punto medio. *ALTURA: perpendicular bajada del vértice al
*DISTANCIA ENTRE DOS PUNTOS EN EL PLANO: P(x a, y b ). Q(x a, y b ) 2 b + ya yb d= ( ) ( ) 2 x a x *SIMETRAL DE UN TRAZO.: perpendicular en el punto medio. *ALTURA: perpendicular bajada del vértice al
Apuntes de dibujo de curvas
 Apuntes de dibujo de curvas El objetivo de estas notas es dar unas nociones básicas sobre dibujo de curvas definidas por medio de ecuaciones cartesianas explícitas o paramétricas y polares: 1. Curvas en
Apuntes de dibujo de curvas El objetivo de estas notas es dar unas nociones básicas sobre dibujo de curvas definidas por medio de ecuaciones cartesianas explícitas o paramétricas y polares: 1. Curvas en
Geometría Analítica Agosto 2016
 Laboratorio #1 Distancia entre dos puntos I.- Demostrar que los puntos dados no son colineales. 1) A (0, 5), B(3, 1), C( 11, 27) 2) A (1, 4), B( 2, 10), C(5, 5) II.- Demostrar que los puntos dados forman
Laboratorio #1 Distancia entre dos puntos I.- Demostrar que los puntos dados no son colineales. 1) A (0, 5), B(3, 1), C( 11, 27) 2) A (1, 4), B( 2, 10), C(5, 5) II.- Demostrar que los puntos dados forman
MÓDULO 8: VECTORES. Física
 MÓDULO 8: VECTORES Física Magnitud vectorial. Elementos. Producto de un vector por un escalar. Operaciones vectoriales. Vector unitario. Suma de vectores por el método de componentes rectangulares. UTN
MÓDULO 8: VECTORES Física Magnitud vectorial. Elementos. Producto de un vector por un escalar. Operaciones vectoriales. Vector unitario. Suma de vectores por el método de componentes rectangulares. UTN
Volumen de Sólidos de Revolución
 60 CAPÍTULO 4 Volumen de Sólidos de Revolución 6 Volumen de sólidos de revolución Cuando una región del plano de coordenadas gira alrededor de una recta l, se genera un cuerpo geométrico denominado sólido
60 CAPÍTULO 4 Volumen de Sólidos de Revolución 6 Volumen de sólidos de revolución Cuando una región del plano de coordenadas gira alrededor de una recta l, se genera un cuerpo geométrico denominado sólido
APLICACIONES DE LA DERIVADA
 APLICACIONES DE LA DERIVADA Ejercicio -Sea f: R R la función definida por f ( ) = + a + b + a) [ 5 puntos] Determina a, b R sabiendo que la gráfica de f pasa por el punto (, ) y tiene un punto de infleión
APLICACIONES DE LA DERIVADA Ejercicio -Sea f: R R la función definida por f ( ) = + a + b + a) [ 5 puntos] Determina a, b R sabiendo que la gráfica de f pasa por el punto (, ) y tiene un punto de infleión
VECTORES. BIDIMENSIONAL
 VETORES. IDIMENSIONL 1. Dado los vectores,,, D, E, F y G que se muestran en la figura, determinar el modulo del vector resultante si = 5N y F = 4N. Rpta. R = 17,35N. 2. En el primer cuadrante de un sistema
VETORES. IDIMENSIONL 1. Dado los vectores,,, D, E, F y G que se muestran en la figura, determinar el modulo del vector resultante si = 5N y F = 4N. Rpta. R = 17,35N. 2. En el primer cuadrante de un sistema
LA CIRCUNFERENCIA. La circunferencia es la sección producida por un plano perpendicular al eje.
 LA CIRCUNFERENCIA La circunferencia es la sección producida por un plano perpendicular al eje. β = 90º La circunferencia es un caso particular de elipse. Se llama circunferencia al lugar geométrico de
LA CIRCUNFERENCIA La circunferencia es la sección producida por un plano perpendicular al eje. β = 90º La circunferencia es un caso particular de elipse. Se llama circunferencia al lugar geométrico de
Repaso de Geometría. Ahora formulamos el teorema:
 Repaso de Geometría Preliminares: En esta sección trabajaremos con los siguientes temas: I. El Teorema de Pitágoras. II. Fórmulas básicas de geometría: perímetro, área y volumen. I. El Teorema de Pitágoras.
Repaso de Geometría Preliminares: En esta sección trabajaremos con los siguientes temas: I. El Teorema de Pitágoras. II. Fórmulas básicas de geometría: perímetro, área y volumen. I. El Teorema de Pitágoras.
95 EJERCICIOS de RECTAS
 9 EJERCICIOS de RECTAS Forma paramétrica: 1. Dado el punto A(,3) y el vector director ur = (1, ), se pide: a) Hallar las ecuaciones paramétricas de la recta r que determinan. b) Obtener otros tres puntos
9 EJERCICIOS de RECTAS Forma paramétrica: 1. Dado el punto A(,3) y el vector director ur = (1, ), se pide: a) Hallar las ecuaciones paramétricas de la recta r que determinan. b) Obtener otros tres puntos
Guía de Estudio Algebra y Trigonometría Para Ciencias Agropecuarias
 Guía de Estudio Para Ciencias Agropecuarias Unidad: Geometría Analítica Los siguientes ejercicios están relacionados con los principales temas de Geometría Analítica e involucra todos los conocimientos
Guía de Estudio Para Ciencias Agropecuarias Unidad: Geometría Analítica Los siguientes ejercicios están relacionados con los principales temas de Geometría Analítica e involucra todos los conocimientos
APUNTES DE GEOMETRÍA ANALÍTICA
 CAPÍTULO 1: LA RECTA EN EL PLANO Conceptos Primitivos: Punto, recta, plano. APUNTES DE GEOMETRÍA ANALÍTICA Definición 1 (Segmento) Llamaremos segmento a la porción de una línea recta comprendida entre
CAPÍTULO 1: LA RECTA EN EL PLANO Conceptos Primitivos: Punto, recta, plano. APUNTES DE GEOMETRÍA ANALÍTICA Definición 1 (Segmento) Llamaremos segmento a la porción de una línea recta comprendida entre
Academia de Matemáticas T.M Geometría Analítica Página 1
 INSTITUTO POLITECNICO NACIONAL CENTRO DE ESTUDIOS CIENTIFICOS Y TECNOLOGICOS 10. CARLOS VALLEJO MÁRQUEZ PROBLEMARIO DE GEOMETRIA ANALITICA Distancia entre puntos 1.- Determina la distancia entre los puntos
INSTITUTO POLITECNICO NACIONAL CENTRO DE ESTUDIOS CIENTIFICOS Y TECNOLOGICOS 10. CARLOS VALLEJO MÁRQUEZ PROBLEMARIO DE GEOMETRIA ANALITICA Distancia entre puntos 1.- Determina la distancia entre los puntos
Campo Magnético en un alambre recto.
 Campo Magnético en un alambre recto. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se hizo pasar
Campo Magnético en un alambre recto. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se hizo pasar
Profesorado de Nivel Medio y Superior en Biología Matemática - 1º Cuatrimestre Año 2013 FUNCIÓN CUADRÁTICA
 Matemática - º Cuatrimestre Año 0 FUNCIÓN CUADRÁTICA Hemos definido anteriormente la función lineal como una función f: R R de la forma f()a+b con a R y b R, que se representa en el plano mediante una
Matemática - º Cuatrimestre Año 0 FUNCIÓN CUADRÁTICA Hemos definido anteriormente la función lineal como una función f: R R de la forma f()a+b con a R y b R, que se representa en el plano mediante una
Bloque 2. Geometría. 2. Vectores. 1. El plano como conjunto de puntos. Ejes de coordenadas
 Bloque 2. Geometría 2. Vectores 1. El plano como conjunto de puntos. Ejes de coordenadas Para representar puntos en un plano (superficie de dos dimensiones) utilizamos dos rectas graduadas y perpendiculares,
Bloque 2. Geometría 2. Vectores 1. El plano como conjunto de puntos. Ejes de coordenadas Para representar puntos en un plano (superficie de dos dimensiones) utilizamos dos rectas graduadas y perpendiculares,
PROBLEMAS DE OPTIMIZACIÓN
 1 PROBLEMAS DE OPTIMIZACIÓN Planteamiento y resolución de los problemas de optimización Se quiere construir una caja, sin tapa, partiendo de una lámina rectangular de cm de larga por de ancha. Para ello
1 PROBLEMAS DE OPTIMIZACIÓN Planteamiento y resolución de los problemas de optimización Se quiere construir una caja, sin tapa, partiendo de una lámina rectangular de cm de larga por de ancha. Para ello
GEOMETRIA ANALITICA- GUIA DE EJERCICIOS DE LA RECTA Y CIRCUNFERENCIA PROF. ANNA LUQUE
 Ejercicios resueltos de la Recta 1. Hallar la ecuación de la recta que pasa por el punto (4. - 1) y tiene un ángulo de inclinación de 135º. SOLUCION: Graficamos La ecuación de la recta se busca por medio
Ejercicios resueltos de la Recta 1. Hallar la ecuación de la recta que pasa por el punto (4. - 1) y tiene un ángulo de inclinación de 135º. SOLUCION: Graficamos La ecuación de la recta se busca por medio
Introducción. Flujo Eléctrico.
 Introducción La descripción cualitativa del campo eléctrico mediante las líneas de fuerza, está relacionada con una ecuación matemática llamada Ley de Gauss, que relaciona el campo eléctrico sobre una
Introducción La descripción cualitativa del campo eléctrico mediante las líneas de fuerza, está relacionada con una ecuación matemática llamada Ley de Gauss, que relaciona el campo eléctrico sobre una
Tema 6. Planos y rectas en el espacio. Problemas métricos (Ángulos, paralelismo y perpendicularidad, simetrías, distancias )
") Matemáticas II (Bachillerato de Ciencias) Geometría del espacio: Problemas métricos 7 Tema 6 Planos rectas en el espacio Problemas métricos (Ángulos, paralelismo perpendicularidad, simetrías, distancias
Matemáticas II (Bachillerato de Ciencias) Geometría del espacio: Problemas métricos 7 Tema 6 Planos rectas en el espacio Problemas métricos (Ángulos, paralelismo perpendicularidad, simetrías, distancias
GEOMETRÍA. que pasa por el punto P y es paralelo a π. (0,9 puntos) b) Determinar la ecuación del plano π
 b) Determinar la ecuación del plano π") GEOMETRÍA 1.- Se considera la recta r : ( x, y, z) = ( t + 1, t,3 t), el plano π: x y z = 0y el punto P (1,1,1). Se pide: a) Determinar la ecuación del plano π 1 que pasa por el punto P y es paralelo a
GEOMETRÍA 1.- Se considera la recta r : ( x, y, z) = ( t + 1, t,3 t), el plano π: x y z = 0y el punto P (1,1,1). Se pide: a) Determinar la ecuación del plano π 1 que pasa por el punto P y es paralelo a
No es otra cosa, que la representación de los resultados de una función sobre el plano carteciano.
 FUNCIONES GRAFICAS No es otra cosa, que la representación de los resultados de una función sobre el plano carteciano. INTÉRVALOS Un intervalo es el conjunto de todos los números reales entre dos números
FUNCIONES GRAFICAS No es otra cosa, que la representación de los resultados de una función sobre el plano carteciano. INTÉRVALOS Un intervalo es el conjunto de todos los números reales entre dos números
Tema 7: Geometría Analítica. Rectas.
 Tema 7: Geometría Analítica. Rectas. En este tema nos centraremos en estudiar la geometría en el plano, así como los elementos que en este aparecen como son los puntos, segmentos, vectores y rectas. Estudiaremos
Tema 7: Geometría Analítica. Rectas. En este tema nos centraremos en estudiar la geometría en el plano, así como los elementos que en este aparecen como son los puntos, segmentos, vectores y rectas. Estudiaremos
Matemáticas. Tercero ESO. Curso 2012-2013. Exámenes
 Matemáticas. Tercero ESO. Curso 0-03. Exámenes . 9 de octubre de 0 Ejercicio. Calcular: 3 5 4 + 3 0 3 7 8 5 3 5 4 + 3 0 5 + 6 0 3 0 3 7 8 5 3 56 0 3 8 0 84 74 5 5 5 Ejercicio. Calcular: 5 6 [ ( 3 3 3 )]
Matemáticas. Tercero ESO. Curso 0-03. Exámenes . 9 de octubre de 0 Ejercicio. Calcular: 3 5 4 + 3 0 3 7 8 5 3 5 4 + 3 0 5 + 6 0 3 0 3 7 8 5 3 56 0 3 8 0 84 74 5 5 5 Ejercicio. Calcular: 5 6 [ ( 3 3 3 )]
GEOMETRÍA ANALÍTICA LA CIRCUNFERENCIA
 LA CIRCUNFERENCIA CONTENIDO. Ecuación común de la circunferencia Ejemplos. Ecuación general de la circunferencia. Análisis de la ecuación. Ejercicios Estudiaremos cuatro curvas que por su importancia aplicaciones
LA CIRCUNFERENCIA CONTENIDO. Ecuación común de la circunferencia Ejemplos. Ecuación general de la circunferencia. Análisis de la ecuación. Ejercicios Estudiaremos cuatro curvas que por su importancia aplicaciones
Proyecto. Tema 6 sesión 2: Generación de Rectas, Circunferencias y Curvas. Geometría Analítica. Isidro Huesca Zavaleta
 Geometría Analítica Tema 6 sesión 2: Generación de Rectas, Circunferencias y Curvas Isidro Huesca Zavaleta La Integración de dos Ciencias La Geometría Analítica nació de la integración de dos ciencias
Geometría Analítica Tema 6 sesión 2: Generación de Rectas, Circunferencias y Curvas Isidro Huesca Zavaleta La Integración de dos Ciencias La Geometría Analítica nació de la integración de dos ciencias
5.5 LÍNEAS TRIGONOMÉTRICAS
 5.5 LÍNES TRIGONOMÉTRIS Sea (O, ) una circunferencia con centro en el origen de coordenadas O(0, 0) radio la unidad. Si se construe un ángulo con vértice en el origen sentido positivo podemos obtener las
5.5 LÍNES TRIGONOMÉTRIS Sea (O, ) una circunferencia con centro en el origen de coordenadas O(0, 0) radio la unidad. Si se construe un ángulo con vértice en el origen sentido positivo podemos obtener las
AYUDAS SOBRE LA LINEA RECTA
 AYUDAS SOBRE LA LINEA RECTA AYUDA : Grafiquemos la función Solución: Se debe escoger algunos números que representan a la variable x, para obtener el valor de la variable y respectivamente así: El proceso:
AYUDAS SOBRE LA LINEA RECTA AYUDA : Grafiquemos la función Solución: Se debe escoger algunos números que representan a la variable x, para obtener el valor de la variable y respectivamente así: El proceso:
NIVEL : 1er. AÑO PROF. L. ALTIMIRAS R. CARRERA : GEOGRAFÍA AYUD. C. ESCOBEDO C. AÑO : 2009 GEOMETRÍA ANALÍTICA
 UNIVERSIDAD DE CHILE FACULTAD DE ARQUITECTURA Y URBANISMO ESCUELA DE GEOGRAFÍA DEPARTAMENTO DE CIENCIAS DE LA CONSTRUCCIÓN ASIGNATURA : MATEMATICAS MATERIAL DE APOYO NIVEL : 1er. AÑO PROF. L. ALTIMIRAS
UNIVERSIDAD DE CHILE FACULTAD DE ARQUITECTURA Y URBANISMO ESCUELA DE GEOGRAFÍA DEPARTAMENTO DE CIENCIAS DE LA CONSTRUCCIÓN ASIGNATURA : MATEMATICAS MATERIAL DE APOYO NIVEL : 1er. AÑO PROF. L. ALTIMIRAS
Geometría del Espacio. Física Geográfica. Licenciatura de Humanidades. Febrero-Mayo,
 Geometría del Espacio. Física Geográfica. Licenciatura de Humanidades. Febrero-Mayo, 2007. 42 Índice. 1. Superficies. 2. El espacio eucĺıdeo tridimensional. Coordenadas Cartesianas. 3. Distancia entre
Geometría del Espacio. Física Geográfica. Licenciatura de Humanidades. Febrero-Mayo, 2007. 42 Índice. 1. Superficies. 2. El espacio eucĺıdeo tridimensional. Coordenadas Cartesianas. 3. Distancia entre
O -2-1 1 2 X -1- -2- de coordenadas, y representamos los números sobre cada eje, eligiendo en ambos ejes la misma unidad, como muestra la figura.
 MATEMÁTICA I Capítulo 1 GEOMETRÍA Plano coordenado Para identificar cada punto del plano con un par ordenado de números, trazamos dos rectas perpendiculares que llamaremos eje y eje y, que se cortan en
MATEMÁTICA I Capítulo 1 GEOMETRÍA Plano coordenado Para identificar cada punto del plano con un par ordenado de números, trazamos dos rectas perpendiculares que llamaremos eje y eje y, que se cortan en
Repaso de Vectores. Autor: Dra. Estela González. flecha. La longitud de la línea indica la magnitud del vector, y su
 Autor: Dra. Estela González Algunas cantidades físicas como tiempo, temperatura, masa, densidad y carga eléctrica se pueden describir plenamente con un número y una unidad, pero otras cantidades (también
Autor: Dra. Estela González Algunas cantidades físicas como tiempo, temperatura, masa, densidad y carga eléctrica se pueden describir plenamente con un número y una unidad, pero otras cantidades (también
ESCALARES Y VECTORES
 ESCALARES Y VECTORES MAGNITUD ESCALAR Un escalar es un tipo de magnitud física que se expresa por un solo número y tiene el mismo valor para todos los observadores. Se dice también que es aquella que solo
ESCALARES Y VECTORES MAGNITUD ESCALAR Un escalar es un tipo de magnitud física que se expresa por un solo número y tiene el mismo valor para todos los observadores. Se dice también que es aquella que solo
ACADEMIA DE FÍSICO-MATEMÁTICAS MATEMÁTICAS III CICLO ESCOLAR TERCER SEMESTRE G E O M É T R Í A GUÍA A N A L Í T I C A
 CENTRO DE ESTUDIOS DE BACHILLERATO LIC. JESÚS REYES HEROLES ACADEMIA DE FÍSICO-MATEMÁTICAS MATEMÁTICAS III CICLO ESCOLAR TERCER SEMESTRE GEOMETRÍA G E O M É T R Í A GUÍA ANALÍTICA A N A L Í T I C A G U
CENTRO DE ESTUDIOS DE BACHILLERATO LIC. JESÚS REYES HEROLES ACADEMIA DE FÍSICO-MATEMÁTICAS MATEMÁTICAS III CICLO ESCOLAR TERCER SEMESTRE GEOMETRÍA G E O M É T R Í A GUÍA ANALÍTICA A N A L Í T I C A G U
Translaciones, giros, simetrías.
 Translaciones, giros, simetrías. Transformaciones geométricas Transformación geométrica es una aplicación del plano en el plano tal que a cada punto de un plano le hace corresponder otro punto del mismo
Translaciones, giros, simetrías. Transformaciones geométricas Transformación geométrica es una aplicación del plano en el plano tal que a cada punto de un plano le hace corresponder otro punto del mismo
FUNCIONES Y FÓRMULAS TRIGONOMÉTRICAS
 FUNCIONES Y FÓRMULAS TRIGONOMÉTRICAS Página 8. Aunque el método para resolver las siguientes preguntas se sistematiza en la página siguiente, puedes resolverlas ahora: a) Cuántos radianes corresponden
FUNCIONES Y FÓRMULAS TRIGONOMÉTRICAS Página 8. Aunque el método para resolver las siguientes preguntas se sistematiza en la página siguiente, puedes resolverlas ahora: a) Cuántos radianes corresponden
PAU Madrid. Matemáticas II. Año Examen modelo. Opción A. Ejercicio 1. Valor: 2 puntos.
 PAU Madrid. Matemáticas II. Año 22. Examen modelo. Opción A. Ejercicio 1. Valor: 2 puntos. Se considera una varilla AB de longitud 1. El extremo A de esta varilla recorre completamente la circunferencia
PAU Madrid. Matemáticas II. Año 22. Examen modelo. Opción A. Ejercicio 1. Valor: 2 puntos. Se considera una varilla AB de longitud 1. El extremo A de esta varilla recorre completamente la circunferencia
TEMA 4: TRIGONOMETRÍA. RAZONES TRIGONOMÉTRICAS
 IES IGNACIO ALDECOA 19 TEMA 4: TRIGONOMETRÍA. RAZONES TRIGONOMÉTRICAS 4.1 Medida de ángulos. Equivalencias. Un ángulo es la región del plano comprendida entre dos semirrectas con origen común. A las semirrectas
IES IGNACIO ALDECOA 19 TEMA 4: TRIGONOMETRÍA. RAZONES TRIGONOMÉTRICAS 4.1 Medida de ángulos. Equivalencias. Un ángulo es la región del plano comprendida entre dos semirrectas con origen común. A las semirrectas
UNIDAD 10: ECUACIONES DE SEGUNDO GRADO.
 UNIDAD 10: ECUACIONES DE SEGUNDO GRADO. 10.1 Estudio elemental de la ecuación de segundo grado. Expresión general. 10.2 Resolución de ecuaciones de segundo grado completas e incompletas. 10.3 Planteamiento
UNIDAD 10: ECUACIONES DE SEGUNDO GRADO. 10.1 Estudio elemental de la ecuación de segundo grado. Expresión general. 10.2 Resolución de ecuaciones de segundo grado completas e incompletas. 10.3 Planteamiento
Clase 9 Sistemas de ecuaciones no lineales
 Clase 9 Instituto de Ciencias Básicas Facultad de Ingeniería Universidad Diego Portales Marzo, 2016 con dos incógnitas Un sistema de dos ecuaciones en el que al menos una ecuación es no lineal, se llama
Clase 9 Instituto de Ciencias Básicas Facultad de Ingeniería Universidad Diego Portales Marzo, 2016 con dos incógnitas Un sistema de dos ecuaciones en el que al menos una ecuación es no lineal, se llama
ÁLGEBRA VECTORIAL Y MATRICES. Ciclo 02 de Circunferencia.
 ÁLGEBRA VECTORIAL Y MATRICES. Ciclo 02 de 2012. Circunferencia. Elementos de la circunferencia. El segmento de recta es una cuerda. El segmento de recta es una cuerda que pasa por el centro, por lo tanto
ÁLGEBRA VECTORIAL Y MATRICES. Ciclo 02 de 2012. Circunferencia. Elementos de la circunferencia. El segmento de recta es una cuerda. El segmento de recta es una cuerda que pasa por el centro, por lo tanto
Cuando se enumeran todos los elementos que componen el conjunto. A = { 1, 2, 3, 4, 5 }
 LOS NÚMEROS REALES TEMA 1 IDEAS SOBRE CONJUNTOS Partiremos de la idea natural de conjunto y del conocimiento de si un elemento pertenece (* ) o no pertenece (* ) a un conjunto. Los conjuntos se pueden
LOS NÚMEROS REALES TEMA 1 IDEAS SOBRE CONJUNTOS Partiremos de la idea natural de conjunto y del conocimiento de si un elemento pertenece (* ) o no pertenece (* ) a un conjunto. Los conjuntos se pueden
2. Cuál es el valor del cociente de la suma entre la diferencia de los senos de dos ángulos?
 1. Qué relaciones ligan las razones trigonométricas de (45º-a) y (45º+a) 2. Cuál es el valor del cociente de la suma entre la diferencia de los senos de dos ángulos? 3. Demostrar la fórmula: 4. Expresar
1. Qué relaciones ligan las razones trigonométricas de (45º-a) y (45º+a) 2. Cuál es el valor del cociente de la suma entre la diferencia de los senos de dos ángulos? 3. Demostrar la fórmula: 4. Expresar
Carrera: Diseño Industrial
 POLÍGONOS 1) Dados los siguientes polígonos se pide determinar cuales de ellos son cóncavos y cuales convexos. Justifique sus respuestas. a) b) c) 2) En los polígonos graficados a continuación indique
POLÍGONOS 1) Dados los siguientes polígonos se pide determinar cuales de ellos son cóncavos y cuales convexos. Justifique sus respuestas. a) b) c) 2) En los polígonos graficados a continuación indique
Funciones reales. Números complejos
 Funciones reales. Números complejos Funciones reales 1. Encuentra todos los números reales x que verifican: a) (x 1)(x 3) > 1 b) x + 1 > 1 1 x c) x 1 + x + 1 < 1 d) 5 < x 2 14x + 5 < 26 2. Si la gráfica
Funciones reales. Números complejos Funciones reales 1. Encuentra todos los números reales x que verifican: a) (x 1)(x 3) > 1 b) x + 1 > 1 1 x c) x 1 + x + 1 < 1 d) 5 < x 2 14x + 5 < 26 2. Si la gráfica
PROBLEMAS RESUELTOS MOVIMIENTO ONDULATORIO
 PROBLEMAS RESUELTOS MOVIMIENTO ONDULATORIO 1. Una onda transversal se propaga en una cuerda según la ecuación (unidades en el S.I.) Calcular la velocidad de propagación de la onda y el estado de vibración
PROBLEMAS RESUELTOS MOVIMIENTO ONDULATORIO 1. Una onda transversal se propaga en una cuerda según la ecuación (unidades en el S.I.) Calcular la velocidad de propagación de la onda y el estado de vibración
C onstrucción de triángulos
 C onstrucción de triángulos Figuras básicas y ángulos Nombre Escuela Edad Fecha Propósito: Distinguir triángulos con características diferentes. Escribe lo que entiendas por triángulo isósceles. Dibuja
C onstrucción de triángulos Figuras básicas y ángulos Nombre Escuela Edad Fecha Propósito: Distinguir triángulos con características diferentes. Escribe lo que entiendas por triángulo isósceles. Dibuja
Módulo 7: Fuentes del campo magnético
 7/04/03 Módulo 7: Fuentes del campo magnético Campo magnético creado por cargas puntuales en movimiento Cuando una carga puntual q se mueve con velocidad v, se produce un campo magnético B en el espacio
7/04/03 Módulo 7: Fuentes del campo magnético Campo magnético creado por cargas puntuales en movimiento Cuando una carga puntual q se mueve con velocidad v, se produce un campo magnético B en el espacio
f: D IR IR x f(x) v. indep. v. dependiente, imagen de x mediante f, y = f(x). A x se le llama antiimagen de y por f, y se denota por x = f -1 (y).
 v. indep. v. dependiente, imagen de x mediante f, y = f(x). A x se le llama antiimagen de y por f, y se denota por x = f -1 (y).") TEMA 8: FUNCIONES. 8. Función real de variable real. 8. Dominio de una función. 8.3 Características de una función: signo, monotonía, acotación, simetría y periodicidad. 8.4 Operaciones con funciones:
TEMA 8: FUNCIONES. 8. Función real de variable real. 8. Dominio de una función. 8.3 Características de una función: signo, monotonía, acotación, simetría y periodicidad. 8.4 Operaciones con funciones:
Ecuaciones Lineales en Dos Variables
 Ecuaciones Lineales en Dos Variables Una ecuación lineal en dos variables tiene la forma general a + b + c = 0; donde a, b, c representan números reales las tres no pueden ser iguales a cero a la misma
Ecuaciones Lineales en Dos Variables Una ecuación lineal en dos variables tiene la forma general a + b + c = 0; donde a, b, c representan números reales las tres no pueden ser iguales a cero a la misma
Electromagnetismo I. Semestre: TAREA 1 Y SU SOLUCIÓN Dr. A. Reyes-Coronado
 Electromagnetismo I Semestre: 01- TAREA 1 Y SU SOLUCIÓN Dr. A. Reyes-Coronado Solución por Carlos Andrés Escobar Ruí 1.- Problema: (5pts) (a) Doce cargas iguales q se encuentran localiadas en los vérices
Electromagnetismo I Semestre: 01- TAREA 1 Y SU SOLUCIÓN Dr. A. Reyes-Coronado Solución por Carlos Andrés Escobar Ruí 1.- Problema: (5pts) (a) Doce cargas iguales q se encuentran localiadas en los vérices
INECUACIONES Y VALOR ABSOLUTO
 INECUACIONES Y VALOR ABSOLUTO U.C.V. F.I.U.C.V. CÁLCULO I (051) - TEMA 1 Pág.: 1 de 3 1. Resuelva las siguientes ecuaciones: a. 4 3x = 5 b. x + 1x + = 3 c. x + 1x + 4 = 10 d. x 1 + = 4 e. x + 3 = 4 f.
INECUACIONES Y VALOR ABSOLUTO U.C.V. F.I.U.C.V. CÁLCULO I (051) - TEMA 1 Pág.: 1 de 3 1. Resuelva las siguientes ecuaciones: a. 4 3x = 5 b. x + 1x + = 3 c. x + 1x + 4 = 10 d. x 1 + = 4 e. x + 3 = 4 f.
Tema 6: Trigonometría.
 Tema 6: Trigonometría. Comenzamos un tema, para mi parecer, muy bonito, en el que estudiaremos algunos aspectos importantes de la geometría, como son los ángulos, las principales razones e identidades
Tema 6: Trigonometría. Comenzamos un tema, para mi parecer, muy bonito, en el que estudiaremos algunos aspectos importantes de la geometría, como son los ángulos, las principales razones e identidades
LA CIRCUNFERENCIA. x y r. (x h) (y k) r. d(p; 0) x y r. d(p; C) (x h) (y k) r. Definición. Ecuación de la circunferencia. Geometría Analítica 3
 (y k) r. d(p; 0) x y r. d(p; C) (x h) (y k) r. Definición. Ecuación de la circunferencia. Geometría Analítica 3") Definición LA CIRCUNFERENCIA Se llama circunferencia a la sección cónica generada al cortar un cono recto con un plano perpendicular al eje del cono. La circunferencia es el lugar geométrico de todos los
Definición LA CIRCUNFERENCIA Se llama circunferencia a la sección cónica generada al cortar un cono recto con un plano perpendicular al eje del cono. La circunferencia es el lugar geométrico de todos los
Esta expresión polinómica puede expresarse como una expresión matricial de la forma; a 11 a 12 a 1n x 1 x 2 q(x 1, x 2,, x n ) = (x 1, x 2,, x n )
 = (x 1, x 2,, x n )") Tema 3 Formas cuadráticas. 3.1. Definición y expresión matricial Definición 3.1.1. Una forma cuadrática sobre R es una aplicación q : R n R que a cada vector x = (x 1, x 2,, x n ) R n le hace corresponder
Tema 3 Formas cuadráticas. 3.1. Definición y expresión matricial Definición 3.1.1. Una forma cuadrática sobre R es una aplicación q : R n R que a cada vector x = (x 1, x 2,, x n ) R n le hace corresponder
SESIÓN 10 DERIVACIÓN DE FUNCIONES TRIGONOMÉTRICAS DIRECTAS
 SESIÓN 0 DERIVACIÓN DE FUNCIONES TRIGONOMÉTRICAS DIRECTAS I. CONTENIDOS:. Derivadas de funciones trigonométricas directas. Ejercicios resueltos. Estrategias Centradas en el Aprendizaje: Ejercicios propuestos
SESIÓN 0 DERIVACIÓN DE FUNCIONES TRIGONOMÉTRICAS DIRECTAS I. CONTENIDOS:. Derivadas de funciones trigonométricas directas. Ejercicios resueltos. Estrategias Centradas en el Aprendizaje: Ejercicios propuestos
Magnitudes que solo poseen módulo. La definición anterior corresponde a
 Estándar Anual Nº Guía práctica Movimiento I: vectores y escalares Física Programa 1. Magnitudes que solo poseen módulo. La definición anterior corresponde a A) B) C) D) E) 2. GUICES012CB32-A16V1 3. Ciencias
Estándar Anual Nº Guía práctica Movimiento I: vectores y escalares Física Programa 1. Magnitudes que solo poseen módulo. La definición anterior corresponde a A) B) C) D) E) 2. GUICES012CB32-A16V1 3. Ciencias
I.E.S. Miguel de Cervantes (Granada) Departamento de Matemáticas GBG 1
 Departamento de Matemáticas GBG 1") PRODUCTO ESCALAR INTRODUCCIÓN El espacio vectorial de los vectores libres del plano se caracteriza por tener definidas dos operaciones: una interna, suma de vectores, y otra externa, producto de un número
PRODUCTO ESCALAR INTRODUCCIÓN El espacio vectorial de los vectores libres del plano se caracteriza por tener definidas dos operaciones: una interna, suma de vectores, y otra externa, producto de un número
UNIDAD 4: FUNCIONES POLINOMIALES Y RACIONALES
 UNIDAD 4: FUNCIONES POLINOMIALES Y RACIONALES En la Sección anterior se abordó contenidos relacionados con las funciones y gráficas, continuamos aprendiendo más sobre funciones; en la presente unidad abordaremos
UNIDAD 4: FUNCIONES POLINOMIALES Y RACIONALES En la Sección anterior se abordó contenidos relacionados con las funciones y gráficas, continuamos aprendiendo más sobre funciones; en la presente unidad abordaremos
Unidad 8 Áreas y Volúmenes
 Unidad 8 Áreas y Volúmenes PÁGINA 132 SOLUCIONES Unidades de medida. Pasa a centímetros cuadrados las siguientes cantidades. a) b) c) Pasa a metros cúbicos las siguientes unidades. a) b) c) Cuántos litros
Unidad 8 Áreas y Volúmenes PÁGINA 132 SOLUCIONES Unidades de medida. Pasa a centímetros cuadrados las siguientes cantidades. a) b) c) Pasa a metros cúbicos las siguientes unidades. a) b) c) Cuántos litros
a) La ecuación del plano que pasa por el punto ( 1, 1, 0 ). (3 puntos) b) La ecuación del plano que es paralelo a la recta r.
 La ecuación del plano que pasa por el punto ( 1, 1, 0 ). (3 puntos) b) La ecuación del plano que es paralelo a la recta r.") PROBLEMAS DE SELECTIVIDAD. BLOQUE GEOMETRÍA 1. En el espacio se dan las rectas Obtener a) El valor de para el que las rectas r y s están contenidas en un plano. (4 puntos) b) La ecuación del plano que
PROBLEMAS DE SELECTIVIDAD. BLOQUE GEOMETRÍA 1. En el espacio se dan las rectas Obtener a) El valor de para el que las rectas r y s están contenidas en un plano. (4 puntos) b) La ecuación del plano que
DIBUJO TÉCNICO II EJERCICIOS DE APOYO. Prof. Jesús Macho Martínez
 DIBUJO TÉCNICO II EJERCICIOS DE APOYO Esta obra de Jesús Macho Martínez está bajo una Licencia Creative Commons Atribución-CompartirIgual 3.0 Unported 1º.- Deducir razonadamente el valor del ángulo α marcado
DIBUJO TÉCNICO II EJERCICIOS DE APOYO Esta obra de Jesús Macho Martínez está bajo una Licencia Creative Commons Atribución-CompartirIgual 3.0 Unported 1º.- Deducir razonadamente el valor del ángulo α marcado
La prueba extraordinaria de septiembre está descrita en los criterios y procedimientos de evaluación.
 La prueba extraordinaria de septiembre está descrita en los criterios y procedimientos de evaluación. Los contenidos mínimos de la materia son los que aparecen con un * UNIDAD 1: LOS NÚMEROS NATURALES
La prueba extraordinaria de septiembre está descrita en los criterios y procedimientos de evaluación. Los contenidos mínimos de la materia son los que aparecen con un * UNIDAD 1: LOS NÚMEROS NATURALES
Capítulo 1 Vectores. 26 Problemas de selección - página 13 (soluciones en la página 99)
") Capítulo 1 Vectores 26 Problemas de selección - página 13 (soluciones en la página 99) 21 Problemas de desarrollo - página 22 (soluciones en la página 100) 11 1.A PROBLEMAS DE SELECCIÓN Sección 1.A Problemas
Capítulo 1 Vectores 26 Problemas de selección - página 13 (soluciones en la página 99) 21 Problemas de desarrollo - página 22 (soluciones en la página 100) 11 1.A PROBLEMAS DE SELECCIÓN Sección 1.A Problemas
UNIVERSIDADES DE ANDALUCÍA PRUEBA DE ACCESO A LA UNIVERSIDAD
 Opción A xcos(x)+b sen(x) Ejercicio 1.- [2 5 puntos] Sabiendo que lím x 0 x 3 es finito, calcula b y el valor del límite. Ejercicio 2.- Sean f : R R y g : R R las funciones definidas mediante f(x) = x(x
Opción A xcos(x)+b sen(x) Ejercicio 1.- [2 5 puntos] Sabiendo que lím x 0 x 3 es finito, calcula b y el valor del límite. Ejercicio 2.- Sean f : R R y g : R R las funciones definidas mediante f(x) = x(x
1. Coordenadas en el plano. (Sistema de coordenadas, ejes de coordenadas, abcisas, ordenadas, cuadrantes)
") Bloque 7. VECTORES. ECUACIONES DE LA RECTA. (En el libro Tema 9, página 159) 1. Coordenadas en el plano. 2. Definiciones: vector libre, módulo, dirección, sentido, vectores equipolentes, vector fijo, coordenadas
Bloque 7. VECTORES. ECUACIONES DE LA RECTA. (En el libro Tema 9, página 159) 1. Coordenadas en el plano. 2. Definiciones: vector libre, módulo, dirección, sentido, vectores equipolentes, vector fijo, coordenadas
Se entiende por trigonometría, según su origen griego, la ciencia que tiene por objetivo la medida de los lados y los ángulos de los triángulos.
 Unidad Trigonometría Introducción... Ángulos. Medida de ángulos... Razones trigonométricas de un ángulo... Resolución de triángulos: triángulos rectángulos... Casos concretos... Introducción Se entiende
Unidad Trigonometría Introducción... Ángulos. Medida de ángulos... Razones trigonométricas de un ángulo... Resolución de triángulos: triángulos rectángulos... Casos concretos... Introducción Se entiende
MATEMÁTICAS 3º ESO PENDIENTES HOJA 1 GEOMETRÍA PLANA. 1.- Calcular el área y el perímetro de los siguientes polígonos:
 MATEMÁTICAS º ESO PENDIENTES HOJA GEOMETRÍA PLANA.- Calcular el área y el perímetro de los siguientes polígonos: a) Un cuadrado de lado 5 cm de lado b) Un cuadrado de diagonal 0 cm. c) Un rectángulo de
MATEMÁTICAS º ESO PENDIENTES HOJA GEOMETRÍA PLANA.- Calcular el área y el perímetro de los siguientes polígonos: a) Un cuadrado de lado 5 cm de lado b) Un cuadrado de diagonal 0 cm. c) Un rectángulo de
Definición matemática de Relación y de Función
 Fecha: 05/0 Versión: DOCENTE: ANTONIO ELI CASTILLA Definición matemática de Relación de Función En matemática, Relación es la correspondencia de un primer conjunto, llamado Dominio, con un segundo conjunto,
Fecha: 05/0 Versión: DOCENTE: ANTONIO ELI CASTILLA Definición matemática de Relación de Función En matemática, Relación es la correspondencia de un primer conjunto, llamado Dominio, con un segundo conjunto,
y cualquier par (x, y) puede escalarse, multiplicarse por un número real s, para obtener otro vector (sx, sy).
 puede escalarse, multiplicarse por un número real s, para obtener otro vector (sx, sy).") UNIDAD II: VECTORES EN DOS Y TRES DIMENSIONES Un espacio vectorial (o espacio lineal) es el objeto básico de estudio en la rama de la matemática llamada álgebra lineal. A los elementos de los espacios
UNIDAD II: VECTORES EN DOS Y TRES DIMENSIONES Un espacio vectorial (o espacio lineal) es el objeto básico de estudio en la rama de la matemática llamada álgebra lineal. A los elementos de los espacios
Parciales Matemática CBC Parciales Resueltos - Exapuni.
 Parciales Matemática CBC 2012 Parciales Resueltos - Exapuni www.exapuni.com.ar Compilado de primeros parciales del 2012 Parcial 1 1) Sea. Hallar todos los puntos de la forma, tales que la distancia entre
Parciales Matemática CBC 2012 Parciales Resueltos - Exapuni www.exapuni.com.ar Compilado de primeros parciales del 2012 Parcial 1 1) Sea. Hallar todos los puntos de la forma, tales que la distancia entre
ÁREAS DE FIGURAS PLANAS
 6. ÁREAS DE FIGURAS PLANAS EN ESTA UNIDAD VAS A APRENDER ÁREAS POLÍGONOS RECTÁNGULO CUADRADO PARALELOGRAMO TRIÁNGULO TRAPECIO ROMBO POLÍGONO IRREGULAR FÓRMULA RESOLUCIÓN DE PROBLEMAS CÍRCULO FÓRMULA FIGURAS
6. ÁREAS DE FIGURAS PLANAS EN ESTA UNIDAD VAS A APRENDER ÁREAS POLÍGONOS RECTÁNGULO CUADRADO PARALELOGRAMO TRIÁNGULO TRAPECIO ROMBO POLÍGONO IRREGULAR FÓRMULA RESOLUCIÓN DE PROBLEMAS CÍRCULO FÓRMULA FIGURAS
2. Ecuaciones de primer grado: (sencillas, con paréntesis, con denominadores).
.") Bloque 3. ECUACIONES Y SISTEMAS (En el libro Temas 4 y 5, páginas 63 y 81) 1. Ecuaciones: Definiciones. Reglas de equivalencia. 2. Ecuaciones de primer grado: (sencillas, con paréntesis, con denominadores).
Bloque 3. ECUACIONES Y SISTEMAS (En el libro Temas 4 y 5, páginas 63 y 81) 1. Ecuaciones: Definiciones. Reglas de equivalencia. 2. Ecuaciones de primer grado: (sencillas, con paréntesis, con denominadores).
1. Cinemática: Elementos del movimiento
 1. Cinemática: Elementos del movimiento 1. Una partícula con velocidad cero, puede tener aceleración distinta de cero? Y si su aceleración es cero, puede cambiar el módulo de la velocidad? 2. La ecuación
1. Cinemática: Elementos del movimiento 1. Una partícula con velocidad cero, puede tener aceleración distinta de cero? Y si su aceleración es cero, puede cambiar el módulo de la velocidad? 2. La ecuación
Cuadriláteros y circunferencia
 CLAVES PARA EMPEZAR Un triángulo isósceles tiene dos lados iguales: b c. Como es rectángulo, se cumple el teorema de Pitágoras: 10 2 b 2 b 2 100 2b 2 b 7,07. Los dos lados miden 7,07 cm cada uno. r A C
CLAVES PARA EMPEZAR Un triángulo isósceles tiene dos lados iguales: b c. Como es rectángulo, se cumple el teorema de Pitágoras: 10 2 b 2 b 2 100 2b 2 b 7,07. Los dos lados miden 7,07 cm cada uno. r A C
VECTORES vector Vector posición par ordenado A(a, b) representa geométricamente segmento de recta dirigido componentes del vector
 representa geométricamente segmento de recta dirigido componentes del vector") VECTORES Un vector (Vector posición) en el plano es un par ordenado de números reales A(a, b). Se representa geométricamente por un segmento de recta dirigido, cuyo punto inicial es el origen del sistema
VECTORES Un vector (Vector posición) en el plano es un par ordenado de números reales A(a, b). Se representa geométricamente por un segmento de recta dirigido, cuyo punto inicial es el origen del sistema
La Distancia de un Punto a una Recta y de un Punto a un Plano, y un Teorema de Pitágoras en Tres Dimensiones
 58 Sociedad de Matemática de Chile La Distancia de un Punto a una Recta y de un Punto a un Plano, y un Teorema de Pitágoras en Tres Dimensiones Miguel Bustamantes 1 - Alejandro Necochea 2 El propósito
58 Sociedad de Matemática de Chile La Distancia de un Punto a una Recta y de un Punto a un Plano, y un Teorema de Pitágoras en Tres Dimensiones Miguel Bustamantes 1 - Alejandro Necochea 2 El propósito
PUNTOS Y VECTORES EN EL PLANO
 PUNTOS Y VECTORES EN EL PLANO PUNTOS EN EL PLANO Tomando como referencia los ejes cartesianos del plano, un punto se representa mediante un par ordenado (a, b) de números reales, es decir, mediante un
PUNTOS Y VECTORES EN EL PLANO PUNTOS EN EL PLANO Tomando como referencia los ejes cartesianos del plano, un punto se representa mediante un par ordenado (a, b) de números reales, es decir, mediante un
En la notación C(3) se indica el valor de la cuenta para 3 kilowatts-hora: C(3) = 60 (3) = 1.253
 se indica el valor de la cuenta para 3 kilowatts-hora: C(3) = 60 (3) = 1.253") Eje temático: Álgebra y funciones Contenidos: Operatoria con expresiones algebraicas Nivel: 2 Medio Funciones 1. Funciones En la vida diaria encontramos situaciones en las que aparecen valores que varían
Eje temático: Álgebra y funciones Contenidos: Operatoria con expresiones algebraicas Nivel: 2 Medio Funciones 1. Funciones En la vida diaria encontramos situaciones en las que aparecen valores que varían
PROF: Jesús Macho Martínez
 DIBUJO TÉCNICO ELEMENTAL PROF: Jesús Macho Martínez 1º.- Trazar la perpendicular a r por el punto P. 2º.- Trazar la bisectriz del ángulo que forman r y s. P * r r s 3º.- Trazar las tangentes interiores
DIBUJO TÉCNICO ELEMENTAL PROF: Jesús Macho Martínez 1º.- Trazar la perpendicular a r por el punto P. 2º.- Trazar la bisectriz del ángulo que forman r y s. P * r r s 3º.- Trazar las tangentes interiores
VELOCIDAD Y ACELERACION. RECTA TANGENTE.
 VELOCIDAD Y ACELERACION. RECTA TANGENTE. 3. Describir la trayectoria y determinar la velocidad y aceleración del movimiento descrito por las curvas siguientes: (a) r (t) = i 4t 2 j + 3t 2 k. (b) r (t)
VELOCIDAD Y ACELERACION. RECTA TANGENTE. 3. Describir la trayectoria y determinar la velocidad y aceleración del movimiento descrito por las curvas siguientes: (a) r (t) = i 4t 2 j + 3t 2 k. (b) r (t)
Funciones 1. D = Dom ( f ) = x R / f(x) R. Recuerda como determinabas los dominios de algunas funciones: x x
 = x R / f(x) R. Recuerda como determinabas los dominios de algunas funciones: x x") Funciones. DEFINICIÓN Y TERMINOLOGÍA.. Definición de función real de variable real. "Es toda correspondencia, f, entre un subconjunto D de números reales y R (o una parte de R), con la condición de que
Funciones. DEFINICIÓN Y TERMINOLOGÍA.. Definición de función real de variable real. "Es toda correspondencia, f, entre un subconjunto D de números reales y R (o una parte de R), con la condición de que
Geometría Analítica Enero 2016
 Laboratorio #1 Distancia entre dos puntos I.- Halle el perímetro del triángulo cuyos vértices son los puntos dados 1) ( 3, 3), ( -1, -3), ( 4, 0) 2) (-2, 5), (4, 3), (7, -2) II.- Demuestre que los puntos
Laboratorio #1 Distancia entre dos puntos I.- Halle el perímetro del triángulo cuyos vértices son los puntos dados 1) ( 3, 3), ( -1, -3), ( 4, 0) 2) (-2, 5), (4, 3), (7, -2) II.- Demuestre que los puntos
Distancia focal de una lente convergente (método del desplazamiento) Fundamento
 Fundamento") Distancia focal de una lente convergente (método del desplazamiento) Fundamento En una lente convergente delgada se considera el eje principal como la recta perpendicular a la lente y que pasa por su centro.
Distancia focal de una lente convergente (método del desplazamiento) Fundamento En una lente convergente delgada se considera el eje principal como la recta perpendicular a la lente y que pasa por su centro.
ESTÁTICA 3 3 VECTORES
 ESTÁTICA Sesión 3 3 VECTORES 3.1. Componentes en dos dimensiones 3.1.1. Operación con vectores por sus componentes 3.1.2. Vectores de posición por sus componentes 3.2. Componentes en tres dimensiones 3.2.1.
ESTÁTICA Sesión 3 3 VECTORES 3.1. Componentes en dos dimensiones 3.1.1. Operación con vectores por sus componentes 3.1.2. Vectores de posición por sus componentes 3.2. Componentes en tres dimensiones 3.2.1.
CONTENIDOS Y CRITERIOS DE EVALUACIÓN MATEMÁTICAS 5º ED. PRIMARIA
 CONTENIDOS Y CRITERIOS DE EVALUACIÓN MATEMÁTICAS 5º ED. PRIMARIA El cálculo y los problemas se irán trabajando y evaluando a lo largo de todo el año. 1ª EVALUACIÓN CONTENIDOS. o Los números de siete y
CONTENIDOS Y CRITERIOS DE EVALUACIÓN MATEMÁTICAS 5º ED. PRIMARIA El cálculo y los problemas se irán trabajando y evaluando a lo largo de todo el año. 1ª EVALUACIÓN CONTENIDOS. o Los números de siete y
TEMA 7: CÓNICAS CIRCUNFERENCIA. A partir de esta ecuación podemos hallar el centro y el radio sin más que deshacer los cambios:
 TEMA 7: CÓNICAS CIRCUNFERENCIA Se define la circunferencia como el lugar geométrico de los puntos del plano que equidistan de un punto fijo llamado centro. A dicha distancia se le llama radio de la circunferencia.
TEMA 7: CÓNICAS CIRCUNFERENCIA Se define la circunferencia como el lugar geométrico de los puntos del plano que equidistan de un punto fijo llamado centro. A dicha distancia se le llama radio de la circunferencia.
ÁLGEBRA LINEAL II Algunas soluciones a la práctica 2.3
 ÁLGEBRA LINEAL II Algunas soluciones a la práctica 2. Transformaciones ortogonales (Curso 2010 2011) 1. Se considera el espacio vectorial euclídeo IR referido a una base ortonormal. Obtener la expresión
ÁLGEBRA LINEAL II Algunas soluciones a la práctica 2. Transformaciones ortogonales (Curso 2010 2011) 1. Se considera el espacio vectorial euclídeo IR referido a una base ortonormal. Obtener la expresión
IES Fco Ayala de Granada Septiembre de 2011 (Septiembre Modelo 2) Solución Germán-Jesús Rubio Luna
 Solución Germán-Jesús Rubio Luna") IES Fco Ayala de Granada Septiembre de 0 (Septiembre Modelo ) Germán-Jesús Rubio Luna UNIVERSIDADES DE ANDALUCÍA PRUEBA DE ACCESO A LA UNIVERSIDAD CURSO 00-0. MATEMÁTICAS II Opción A Ejercicio opción A,
IES Fco Ayala de Granada Septiembre de 0 (Septiembre Modelo ) Germán-Jesús Rubio Luna UNIVERSIDADES DE ANDALUCÍA PRUEBA DE ACCESO A LA UNIVERSIDAD CURSO 00-0. MATEMÁTICAS II Opción A Ejercicio opción A,
1 Curvas planas. Solución de los ejercicios propuestos.
 1 Curvas planas. Solución de los ejercicios propuestos. 1. Se considera el lugar geométrico de los puntos del plano tales que la suma del cuadrado de las distancias a los puntos P 1 = (, 0) y P = (, 0)
1 Curvas planas. Solución de los ejercicios propuestos. 1. Se considera el lugar geométrico de los puntos del plano tales que la suma del cuadrado de las distancias a los puntos P 1 = (, 0) y P = (, 0)
Solución: Las rectas paralelas a estas tienen la misma pendiente, es decir 2; por tanto la ecuación es:
 Representa las rectas y = x + e y = x y calcula el punto que tienen en común El punto que tienen en común estas dos rectas se obtiene resolviendo el siguiente sistema de ecuaciones: y = x + y = x 3 x =,
Representa las rectas y = x + e y = x y calcula el punto que tienen en común El punto que tienen en común estas dos rectas se obtiene resolviendo el siguiente sistema de ecuaciones: y = x + y = x 3 x =,