DISEÑO Y CONSTRUCCIÓN DE UNA UNIDAD DE VIGILANCIA Y SEGURIDAD ROBÓTICA PARA ÁREAS RESTRINGIDAS DE LA ESCUELA TÉCNICA DE LA FUERZA AÉREA
|
|
|
- María Soledad Espejo Villanueva
- hace 5 años
- Vistas:
Transcripción

1 DISEÑO Y CONSTRUCCIÓN DE UNA UNIDAD DE VIGILANCIA Y SEGURIDAD ROBÓTICA PARA ÁREAS RESTRINGIDAS DE LA ESCUELA TÉCNICA DE LA FUERZA AÉREA INGENIERÍA MECATRÓNICA Autores: Diego Jerez Bunces Director: Ing. Eddie Galarza Oscar Coello Quisilema Codirector: Ing. Oscar Arteaga
2 AGENDA OBJETIVOS CONCEPTOS BÁSICOS CRITERIOS DE DISEÑO ANÁLISIS Y RESULTADOS ANÁLISIS FINACIERO DE COSTOS CONCLUSIONES RECOMENDACIONES 2
3 OBJETIVOS

4 OBJETIVOS GENERAL DISEÑAR Y CONSTRUIR UNA UNIDAD DE VIGILANCIA Y SEGURIDAD ROBÓTICA PARA ÁREAS RESTRINGIDAS DE LA ESCUELA TÉCNICA DE LA FUERZA AÉREA. 4
5 OBJETIVOS ESPECÍFICOS Plantear el diseño de la unidad de vigilancia y analizar los requerimientos y materiales necesarios para la construcción del mismo. Implementar el sistema de comunicación inalámbrica para enviar información de vigilancia hacia el computador a través de un sistema de procesamiento de imágenes. Conseguir y clasificar información necesaria y apropiada acerca de una unidad de vigilancia para áreas militares. Construir el sistema de movimiento principal de la unidad de vigilancia y ubicación de los sensores receptores de información que se va a implementar. 5
6 CONCEPTOS BÁSICOS


7 CONCEPTOS BÁSICOS ROBÓTICA La robótica es una tecnología multidisciplinaria, ya que hace uso de recursos que le proporcionan otras ciencias y disciplinas. Se apoya en gran medida en los progresos de la microelectrónica y de la informática, así como en nuevas disciplinas tales como el reconocimiento de patrones e inteligencia artificial. 7
8 CLASIFICACIÓN POR SU GENERACIÓN POR SU NIVEL DE INTELIGENCIA POR SU NIVEL DE LENGUAJE POR SU APLICACIÓN DISPOSITIVOS DE MANEJO MANUAL NIVEL DE INTELIGENCIA ARTIFICIAL SISTEMAS GUIADOS 8

9 ARDUINO UNO Es una plataforma de electrónica abierta para la creación de prototipos basada en software y hardware flexibles y fáciles de usar. 9
10 SISTEMAS DE VIGILANCIA La vigilancia tecnológica consiste en realizar de manera sistemática la captura, el análisis, la difusión y la explotación de las informaciones técnicas. 10

11 REDES DE COMUNICACIÓN INALÁMBRICAS 11

12 VISIÓN ARTIFICIAL El propósito principal es programar un computador en diversos tipos de lenguajes en los que el operador se sienta identificado, para que el ordenador entienda las características de una imagen. 12

13 SOFTWARE DE ADQUISICIÓN Y PROCESAMIENTO DE IMÁGENES LABVIEW NATIONAL INSTRUMENTS Constituye un sistema de programación gráfica para aplicaciones que involucren adquisición, control, análisis y presentación de datos, mediante el uso de lenguaje G (diagramas de bloques). 13


14 IMAQ VISION Permite implementar aplicaciones inteligentes de una imagen y visión. Presenta herramientas, como detectores de borde y reconocimiento de patrones complejos 14
15 CRITERIOS DE DISEÑO

16 CRITERIOS DE DISEÑO ESQUEMA GENERAL DE FUNCIONAMIENTO 16
17 PARTES DE CONTROL 1. Se encargará del sistema de monitoreo, vigilancia, transmisión de imágenes y video por medio de una cámara inalámbrica a la PC por medio de conexión Wi-Fi. 2. Se encargará de la parte de gestión de la ruta y el control en general de cada una de las actividades que realizará ya sea en forma automática o manual. 17




18 SELECCIÓN DE ELEMENTOS FIBRA DE VIDRIO MOTOR TRACCIÓN RUEDAS DE CAUCHO MOTOR DIRECCIÓN BATERIA LIPO 18
19 DISEÑO MECÁNICO

20 DIMENSIONAMIENTO DEL MECANISMO DE DIRECCIÓN DIRECCIÓN TIPO ACKERMAN 20
 = 8,38 (40 )")
21 DIMENSIONAMIENTO DEL MECANISMO DE DIRECCIÓN Barra de acoplamiento = 239,5 mm Bielas de las manguetas = 30 mm Ángulo mínimo de giro (α_min) = 8,38 (40 ) 21
22 DIMENSIONAMIENTO DE LA PLATAFORMA O CHASIS 1.Sistema de dirección. 2.Sistema de visión. 3.Carrocería del robot. 22
23 PARÁMETROS DEL DISEÑO MECÁNICO Peso máximo de la unidad con accesorios (W): 150 N (15 kg) Ancho máximo de la unidad (b): 210 mm Distancia máxima entre ejes de las ruedas (L): 220 mm Inscribirse en una corona circular con radio: Exterior (R): 1500 mm Interior (R ): 750 mm Ángulo de giro máximo (α), entre: 35 y 45 23

24 ANÁLISIS DE ESFUERZOS EN EL MECANISMO DE DIRECCIÓN ANÁLISIS DE TENSIÓN: La tensión máxima de Von Mises se produce en los extremos de la barra fija y su valor es de 102,6 Mpa. 24
25 ANÁLISIS DE ESFUERZOS EN EL MECANISMO DE DIRECCIÓN DESPLAZAMIENTO ESTÁTICO: Los desplazamientos máximos se producen en la zona media de la barra de acoplamiento y su valor máximo es de mm 25
26 ANÁLISIS DE ESFUERZOS EN EL MECANISMO DE DIRECCIÓN FACTOR DE SEGURIDAD: Las zonas críticas se encuentran en los extremos de la barra fija. 26
27 MODELO COMPLETO DE LA UNIDAD DE VIGILANCIA 27
28 DISEÑO ELECTRÓNICO
29 PARÁMETROS DE DISEÑO RECONOCIMIENTO DEL LUGAR LOCALIZACIÓN DE POSIBLES INTRUSOS VISUALIZACIÓN MEDIANTE EL USO DEL SOFTWARE EVALUACIÓN 29

30 UBICACIÓN DE LA CÁMARA Las características técnicas de la cámara inalámbrica son: Frecuencia Ghz Potencia: 200mW Voltaje Operativo: 12V DC Antena: Omni Direccional Píxel: 250k Resolución: 380 líneas Horizontales Exposición: Automática 30
31 SISTEMA DE ALIMENTACIÓN Son baterías de última generación especialmente para trabajar bajo radio control, y su principal característica que es de bajo peso 31
32 TARJETA DE CONTROL 32

33 PLACAS PUENTE H REGULADOR DE VOLTAJE A 5V 33

34 MONITOREO Y VIGILANCIA Matriz de Espacios de Estado 34


35 SOFTWARE DE CONTROL DISEÑO HMI 35
36 MODO MANUAL 36
37 MODO AUTOMÁTICO 37


38 PROTOTIPO IMPLEMENTADO. 38
39 ANÁLISIS Y RESULTADOS

40 POSICIONAMIENTO DE LA CÁMARA 40


41 Visualización HMI Imagen Adquirida Y procesada en HMI 41
")

42 BASE DE DATOS (IMÁGENES) Simulación Generar Set Points por Tiempo 42

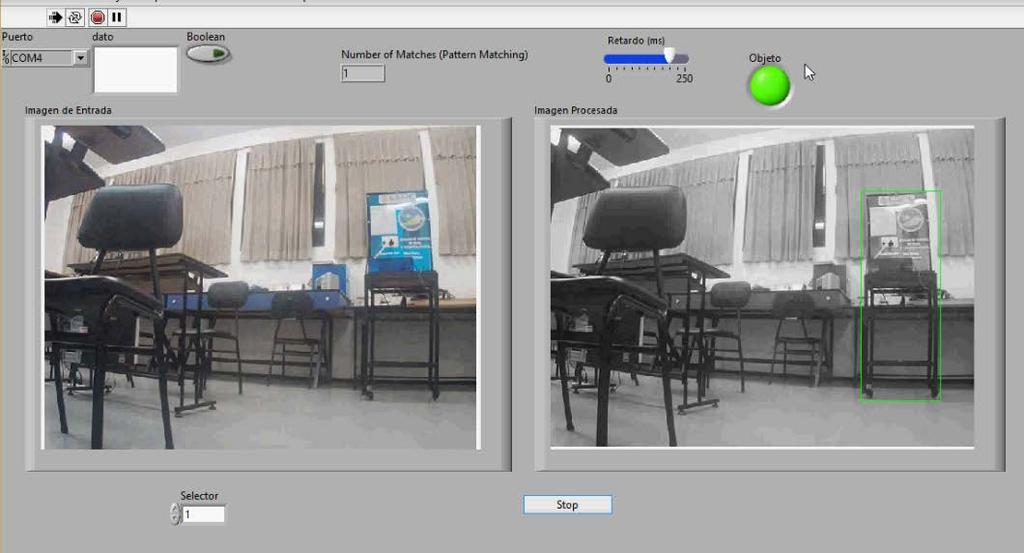
43 RECONOCIMIENTO DE OBJETOS 43
44 FUNCIONAMIENTO GENERAL El Funcionamiento General del robot lo realiza en modo manual y automático como se detalla a continuación. El robot se moviliza en el terreno El robot realiza los giros necesarios programados La cámara envía en tiempo real la imagen capturada 44
45 ANÁLISIS FINANCIERO DE COSTOS
46 ANÁLISIS FINANCIERO DE COSTOS N DESCRIPCIÓN V. UNITARIO V. TOTAL 1 MATERIA PRIMA COMPONENTES MECÁNICOS COMPONENTES ELECTRÓNICOS SOFTWARE DE APLICACIÓN TARJETAS DE COMUNICACIÓN OTROS 6 INTERNET TRANSPORTE VARIOS TOTAL
47 CONCLUSIONES
48 CONCLUSIONES El prototipo de robot de vigilancia puede desenvolverse sin mayor tipo de problemas en cualquier tipo de ambiente externo, ya que gestiona de forma correcta cada uno de los obstáculos que se pueden presentar. El sistema de vigilancia detecta intrusos, desde el la cámara, es por ello que se realiza el monitoreo desde diferentes puntos a lo largo del terreno o área de vigilancia. La comunicación de la cámara con la PC es Wi-Fi con configuración de Access Point El sistema de alimentación del prototipo, principalmente el de los motores del diseño tiene una duración de 6 horas como máximo en trabajo continuo, dependiendo dicha duración de los tiempos de descanso que se le asignen al prototipo. 48
49 RECOMEDACIONES
50 RECOMEDACIONES Tener bien cargadas las baterías para evitar apagones del robot. Tener un tiempo de reacción bueno para el manejo manual. Implementar sensores auxiliares en caso de tener evitar colisiones tanto en el manejo automático como el manual. La cámara solo realiza giros de arriba abajo se debería implementar un movimiento de izquierda a derecha y viceversa. 50
51 GRACIAS POR SU ATENCIÓN
INSTRUMENTACION VIRTUAL. Conceptos Teóricos CONCURSO BECARIO ACADEMICO, ING. TITO GONZALEZ
 INSTRUMENTACION VIRTUAL Conceptos Teóricos CONCURSO BECARIO ACADEMICO, ING. TITO GONZALEZ QUE ES LA INSTRUMENTACION VIRTUAL? Es el área de la ingeniería en la que se busca obtener dispositivos para adquirir
INSTRUMENTACION VIRTUAL Conceptos Teóricos CONCURSO BECARIO ACADEMICO, ING. TITO GONZALEZ QUE ES LA INSTRUMENTACION VIRTUAL? Es el área de la ingeniería en la que se busca obtener dispositivos para adquirir
UNIVERSIDAD NACIONAL DE LOJA
 UNIVERSIDAD NACIONAL DE LOJA ÁREA DE ANERGÍA, LAS INDUSTRIASS Y LOS RECURSOS NATURALES NO RENOVABLES INGENIERÍA EN ELECTRÓNICA Y TELECOMUNICACIONES DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA AUTÓNOMO DISPENSADOR
UNIVERSIDAD NACIONAL DE LOJA ÁREA DE ANERGÍA, LAS INDUSTRIASS Y LOS RECURSOS NATURALES NO RENOVABLES INGENIERÍA EN ELECTRÓNICA Y TELECOMUNICACIONES DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA AUTÓNOMO DISPENSADOR
ENTORNO DE SIMULACIÓN Y CONTROL DE UN ROBOT VELOCISTA
 ENTORNO DE SIMULACIÓN Y CONTROL DE UN ROBOT VELOCISTA PROYECTO FIN DE CARRERA Departamento de Electrónica. Universidad de Alcalá. Ingeniería Técnica de Telecomunicación. Especialidad en Sistemas Electrónicos
ENTORNO DE SIMULACIÓN Y CONTROL DE UN ROBOT VELOCISTA PROYECTO FIN DE CARRERA Departamento de Electrónica. Universidad de Alcalá. Ingeniería Técnica de Telecomunicación. Especialidad en Sistemas Electrónicos
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA MECATRÓNICA
 DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA MECATRÓNICA TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO MECATRÓNICO TEMA: DISEÑO E IMPLEMENTACIÓN DE UNA
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA MECATRÓNICA TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO MECATRÓNICO TEMA: DISEÑO E IMPLEMENTACIÓN DE UNA
TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN MECATRÓNICA
 TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN MECATRÓNICA DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE MEDICIÓN DE VELOCIDAD PARA VEHICULOS UTILIZANDO VISIÓN ARTIFICIAL IMPLEMENTADO
TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN MECATRÓNICA DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE MEDICIÓN DE VELOCIDAD PARA VEHICULOS UTILIZANDO VISIÓN ARTIFICIAL IMPLEMENTADO
TICA EN LA ESCUELA. El Robot (hardware) Alicia Escudero. Apellido y Nombre: Escudero Alicia. Tema: características de un robot
 Alicia Escudero. Apellido y Nombre: Escudero Alicia. Tema: características de un robot") Alicia Escudero ROBÓTICA TICA EN LA ESCUELA El Robot (hardware) Apellido y Nombre: Escudero Alicia Tema: características de un robot E-mail: alyy_94@hotmail.com D.N.I: 36.491.199 02/05/1994 Introducción
Alicia Escudero ROBÓTICA TICA EN LA ESCUELA El Robot (hardware) Apellido y Nombre: Escudero Alicia Tema: características de un robot E-mail: alyy_94@hotmail.com D.N.I: 36.491.199 02/05/1994 Introducción
Programación Arduino Con Visualino
 Programación Arduino Con Visualino Ponente: Ing. Patricio Tisalema ROBOTS FAMOSOS Y NO TAN FAMOSOS PERO SÍ CERCANOS QUÉ ES ROBOT? Es un sistema electro-mecánico que por su apariencia de movimientos, ofrece
Programación Arduino Con Visualino Ponente: Ing. Patricio Tisalema ROBOTS FAMOSOS Y NO TAN FAMOSOS PERO SÍ CERCANOS QUÉ ES ROBOT? Es un sistema electro-mecánico que por su apariencia de movimientos, ofrece
Diseño e implementación de una plataforma robótica móvil inalámbrica con tracción intercambiable para el laboratorio de Mecatrónica de la ESPE-L
 Diseño e implementación de una plataforma robótica móvil inalámbrica con tracción intercambiable para el laboratorio de Mecatrónica de la ESPE-L Por Paúl Tinizaray Características del terreno Conocer las
Diseño e implementación de una plataforma robótica móvil inalámbrica con tracción intercambiable para el laboratorio de Mecatrónica de la ESPE-L Por Paúl Tinizaray Características del terreno Conocer las
DISEÑO E IMPLEMENTACIÓN DE UN MÓDULO DIDÁCTICO PARA LA MEDICIÓN DEL RITMO CARDÍACO MEDIANTE LA TÉCNICA DE PULSIOMETRÍA
 DISEÑO E IMPLEMENTACIÓN DE UN MÓDULO DIDÁCTICO PARA LA MEDICIÓN DEL RITMO CARDÍACO MEDIANTE LA TÉCNICA DE PULSIOMETRÍA DIRECTOR: ING. FRANKLIN SILVA CODIRECTOR: ING. FABRICIO PÉREZ AUTOR: GALO ANDRADE.
DISEÑO E IMPLEMENTACIÓN DE UN MÓDULO DIDÁCTICO PARA LA MEDICIÓN DEL RITMO CARDÍACO MEDIANTE LA TÉCNICA DE PULSIOMETRÍA DIRECTOR: ING. FRANKLIN SILVA CODIRECTOR: ING. FABRICIO PÉREZ AUTOR: GALO ANDRADE.
Índice de Contenidos
 Índice de Contenidos CAPÍTULO 1 INTRODUCCIÓN... 13 1.1 Problemática... 14 1.2 Contexto industrial... 14 1.2.1 Lugar de aplicación... 15 1.3 Objetivos... 16 1.3.1 Objetivo general... 17 1.3.2 Objetivos
Índice de Contenidos CAPÍTULO 1 INTRODUCCIÓN... 13 1.1 Problemática... 14 1.2 Contexto industrial... 14 1.2.1 Lugar de aplicación... 15 1.3 Objetivos... 16 1.3.1 Objetivo general... 17 1.3.2 Objetivos
DIDÁCTICA DE TEMPERATURA
 DISEÑO E IMPLEMENTACIÓN DE UN CONTROL DIFUSO PARA UNA ESTACIÓN DIDÁCTICA DE TEMPERATURA Universidad Tecnológica de Pereira Facultad de Tecnologías Presentado por: Carlos Andrés Murillo Montaño Jorge Hernán
DISEÑO E IMPLEMENTACIÓN DE UN CONTROL DIFUSO PARA UNA ESTACIÓN DIDÁCTICA DE TEMPERATURA Universidad Tecnológica de Pereira Facultad de Tecnologías Presentado por: Carlos Andrés Murillo Montaño Jorge Hernán
CARRERA DE INGENIERÍA MECATRÓNICA
 CARRERA DE INGENIERÍA MECATRÓNICA DESARROLLO DE UN SISTEMA DE UBICACIÓN EN LA PLATAFORMA ROBÓTICA PARA EXTERIORES TELEOPERADA DEL LABORATORIO DE MANUFACTURA REALIZADO POR: GARZÓN JARAMILO PEDRO MIGUEL
CARRERA DE INGENIERÍA MECATRÓNICA DESARROLLO DE UN SISTEMA DE UBICACIÓN EN LA PLATAFORMA ROBÓTICA PARA EXTERIORES TELEOPERADA DEL LABORATORIO DE MANUFACTURA REALIZADO POR: GARZÓN JARAMILO PEDRO MIGUEL
CAPÍTULO 1. pueden llegar y estos robots llegarían a realizar ese trabajo con el solo hecho
 CAPÍTULO 1 1 Descripción del Proyecto. 1.1 Antecedentes El avance tecnológico cada día es más vertiginoso en toda área de la electrónica, y somos testigos de que día tras día surgen nuevos dispositivos
CAPÍTULO 1 1 Descripción del Proyecto. 1.1 Antecedentes El avance tecnológico cada día es más vertiginoso en toda área de la electrónica, y somos testigos de que día tras día surgen nuevos dispositivos
AUTORAS: JOHANNA IZA GABRIELA TACO TUTOR: ING. OSCAR ARTEAGA
 INVESTIGACIÓN DE LA MANIOBRABILIDAD DE UNA PLATAFORMA ROBÓTICA CON SISTEMA DE TRACCIÓN OMNIDIRECCIONAL E IMPLEMENTACIÓN EN EL PROYECTO DE INVESTIGACIÓN TELE OPERACIÓN BILATERAL CORPORATIVO DE MÚLTIPLES
INVESTIGACIÓN DE LA MANIOBRABILIDAD DE UNA PLATAFORMA ROBÓTICA CON SISTEMA DE TRACCIÓN OMNIDIRECCIONAL E IMPLEMENTACIÓN EN EL PROYECTO DE INVESTIGACIÓN TELE OPERACIÓN BILATERAL CORPORATIVO DE MÚLTIPLES
Novedad. Instrumentación electrónica aplicada Prácticas de la laboratorio. pvp. $
 Instrumentación electrónica aplicada Prácticas de la laboratorio Christian G. Quintero M José Oñate López Humberto Arias de la Hoz 2011, 68 p., 21.5 x 28 cm ISBN 978-958-741-139-3 pvp. $ 26.000 Este texto
Instrumentación electrónica aplicada Prácticas de la laboratorio Christian G. Quintero M José Oñate López Humberto Arias de la Hoz 2011, 68 p., 21.5 x 28 cm ISBN 978-958-741-139-3 pvp. $ 26.000 Este texto
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE CLASIFICACIÓN DIDÁCTICO PARA SUPERVISAR UN PROCESO INDUSTRIAL EN LABORATORIO DE HIDRÓNICA Y NEUTRÓNICA
 DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE CLASIFICACIÓN DIDÁCTICO PARA SUPERVISAR UN PROCESO INDUSTRIAL EN LABORATORIO DE HIDRÓNICA Y NEUTRÓNICA PROYECTO REALIZADO POR: MAYRA TAMARA JARAMILLO M. DIRECTOR
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE CLASIFICACIÓN DIDÁCTICO PARA SUPERVISAR UN PROCESO INDUSTRIAL EN LABORATORIO DE HIDRÓNICA Y NEUTRÓNICA PROYECTO REALIZADO POR: MAYRA TAMARA JARAMILLO M. DIRECTOR
2- Sistema de comunicación utilizado (sockets TCP o UDP, aplicaciones, etc.):
:") UNIVERSIDAD DE SAN BUENAVENTURA SEDE BOGOTA INGENIERIA MECATRONICA GRUPO S.I.R.A TUTOR: MORIAN NAIR CALDERON INTEGRANTES: NICOLAS FELIPE CUBILLOS. NAYKOL ANDREY ESPITIA. CRISTIAN DANIEL GARCIA. CARLOS
UNIVERSIDAD DE SAN BUENAVENTURA SEDE BOGOTA INGENIERIA MECATRONICA GRUPO S.I.R.A TUTOR: MORIAN NAIR CALDERON INTEGRANTES: NICOLAS FELIPE CUBILLOS. NAYKOL ANDREY ESPITIA. CRISTIAN DANIEL GARCIA. CARLOS
CARRERA DE INGENIERÍA EN MECATRÓNICA
 CARRERA DE INGENIERÍA EN MECATRÓNICA TEMA: DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA MECÁNICO PARA UN ROBOT MANIPULADOR MÓVIL EN EL PROYECTO DE INVESTIGACIÓN TELE OPERACIÓN BILATERAL CORPORATIVO DE MÚLTIPLES
CARRERA DE INGENIERÍA EN MECATRÓNICA TEMA: DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA MECÁNICO PARA UN ROBOT MANIPULADOR MÓVIL EN EL PROYECTO DE INVESTIGACIÓN TELE OPERACIÓN BILATERAL CORPORATIVO DE MÚLTIPLES
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA PARA DETECCIÓN DE VEHÍCULOS ROBADOS EN MOVIMIENTO, EMPLEANDO TECNOLOGÍA BEAGLEBONE, POR MEDIO DE SOFTWARE LIBRE.
 DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA PARA DETECCIÓN DE VEHÍCULOS ROBADOS EN MOVIMIENTO, EMPLEANDO TECNOLOGÍA BEAGLEBONE, POR MEDIO DE SOFTWARE LIBRE. Realizado por: Garzón Canchignia Roberto Carlos Pacheco
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA PARA DETECCIÓN DE VEHÍCULOS ROBADOS EN MOVIMIENTO, EMPLEANDO TECNOLOGÍA BEAGLEBONE, POR MEDIO DE SOFTWARE LIBRE. Realizado por: Garzón Canchignia Roberto Carlos Pacheco
Diseño de un robot móvil con modelo cinemático Ackermann
 Diseño de un robot móvil con modelo cinemático Ackermann. CUJAE.2017 1 Diseño de un robot móvil con modelo cinemático Ackermann J. Piñera-García *,1, J. Amigó-Vega *,1, J. Concepción-Álvarez 1, R. Casimiro-Martínez
Diseño de un robot móvil con modelo cinemático Ackermann. CUJAE.2017 1 Diseño de un robot móvil con modelo cinemático Ackermann J. Piñera-García *,1, J. Amigó-Vega *,1, J. Concepción-Álvarez 1, R. Casimiro-Martínez
Construct Your Dreams Shenzhen Maker Works Technology Co., Ltd. Soporte técnico:
 Construct Your Dreams Shenzhen Maker Works Technology Co., Ltd. Soporte técnico: support@makeblock.cc www.makeblock.cc :himakeblock : makeblock bbs.makeblock.cc Construct Your Dreams ÍNDICE mbot es un
Construct Your Dreams Shenzhen Maker Works Technology Co., Ltd. Soporte técnico: support@makeblock.cc www.makeblock.cc :himakeblock : makeblock bbs.makeblock.cc Construct Your Dreams ÍNDICE mbot es un
INSTITUTO TECNOLÓGICO SUPERIOR DE TEPEACA. Sistema de Control de Posición de un mini-auto usando LabView.
 INSTITUTO TECNOLÓGICO SUPERIOR DE TEPEACA. Sistema de Control de Posición de un mini-auto usando LabView. Sánchez A. (BUAP ITS Tepeaca) e-mail: armando_sac@ece.buap.mx Volumen 1. Número 2. Recibido: Mayo2010.
INSTITUTO TECNOLÓGICO SUPERIOR DE TEPEACA. Sistema de Control de Posición de un mini-auto usando LabView. Sánchez A. (BUAP ITS Tepeaca) e-mail: armando_sac@ece.buap.mx Volumen 1. Número 2. Recibido: Mayo2010.
FACULTAD DE INGENIERÍA
 FACULTAD DE INGENIERÍA FORMACIÓN EN INGENIERÍA DE SOFTWARE Y BASES DE DATOS EN LOS ESTUDIANTES DE LA CARRERA DE ING. EN COMPUTACIÓN DE LA FI, UNAM EN EL PLAN DE ESTUDIOS 2015 MAYO, 2015 Porcentaje de alumnos
FACULTAD DE INGENIERÍA FORMACIÓN EN INGENIERÍA DE SOFTWARE Y BASES DE DATOS EN LOS ESTUDIANTES DE LA CARRERA DE ING. EN COMPUTACIÓN DE LA FI, UNAM EN EL PLAN DE ESTUDIOS 2015 MAYO, 2015 Porcentaje de alumnos
INFORME DE PROGRESO TUCSON
 TUCSON 2017 INFORME DE PROGRESO TUCSON ROBOT AGRICOLA FERNANDO GAMBINO FABIAN JUAREZ EMMANUEL VAZQUEZ L.I.I.R.I.A. AETTI IDEA GENERAL Diseñar y armar un robot móvil, capaz de desplazarse en terrenos agrícolas
TUCSON 2017 INFORME DE PROGRESO TUCSON ROBOT AGRICOLA FERNANDO GAMBINO FABIAN JUAREZ EMMANUEL VAZQUEZ L.I.I.R.I.A. AETTI IDEA GENERAL Diseñar y armar un robot móvil, capaz de desplazarse en terrenos agrícolas
CURSO PROVINCIAL: INTRODUCCIÓN A LA ROBÓTICA CON ARDUINO. ROBÓTICA EDUCATIVA EducaBot. Manuel Hidalgo Díaz
 CURSO PROVINCIAL: INTRODUCCIÓN A LA ROBÓTICA CON ARDUINO ROBÓTICA EDUCATIVA EducaBot Manuel Hidalgo Díaz Enero 2011 ÍNDICE ROBÓTICA...3 ROBÓTICA EDUCATIVA...4 EducaBot...6 BIBLIOGRAFÍA...8 INTRODUCCIÓN
CURSO PROVINCIAL: INTRODUCCIÓN A LA ROBÓTICA CON ARDUINO ROBÓTICA EDUCATIVA EducaBot Manuel Hidalgo Díaz Enero 2011 ÍNDICE ROBÓTICA...3 ROBÓTICA EDUCATIVA...4 EducaBot...6 BIBLIOGRAFÍA...8 INTRODUCCIÓN
Ingeniería Electrónica e Instrumentación
 Desarrollo de un sistema HMI en las plataformas Android e ios para el monitoreo de la red inalámbrica de sensores agrícolas ubicada en el barrio Rumipamba de Navas cantón Salcedo, provincia de Cotopaxi
Desarrollo de un sistema HMI en las plataformas Android e ios para el monitoreo de la red inalámbrica de sensores agrícolas ubicada en el barrio Rumipamba de Navas cantón Salcedo, provincia de Cotopaxi
PLAN DE ESTUDIOS 2008-II SÍLABO
 UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA I. INFORMACIÓN GENERAL: DEPARTAMENTO ACADÉMICO DE INGENIERÍA PLAN DE ESTUDIOS 2008-II SÍLABO 1.1 Asignatura : INTRODUCCIÓN A LA INGENIERÍA MECATRÓNICA 1.2.
UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA I. INFORMACIÓN GENERAL: DEPARTAMENTO ACADÉMICO DE INGENIERÍA PLAN DE ESTUDIOS 2008-II SÍLABO 1.1 Asignatura : INTRODUCCIÓN A LA INGENIERÍA MECATRÓNICA 1.2.
Índice de Contenidos
 Índice de Contenidos CAPÍTULO 1 INTRODUCCION... 12 1.1 El problema (o la oportunidad)... 13 1.2 Objetivo General... 13 1.3 Objetivos específicos... 13 1.5 Alcances y limitaciones... 15 Capítulo 2 MARCO
Índice de Contenidos CAPÍTULO 1 INTRODUCCION... 12 1.1 El problema (o la oportunidad)... 13 1.2 Objetivo General... 13 1.3 Objetivos específicos... 13 1.5 Alcances y limitaciones... 15 Capítulo 2 MARCO
UNIVERSIDAD TECNOLOGICA NACIONAL F.R. AVELLANEDA
 UNIVERSIDAD TECNOLOGICA NACIONAL F.R. AVELLANEDA CENTRO DE ESTUDIANTES DE INGENIERIA TECNOLOGICA ASIGNATURA: Proyecto Final TRABAJO PRACTICO N : -- TITULO: Anteproyecto Transporte Autónomo de Cargas PROFESOR:
UNIVERSIDAD TECNOLOGICA NACIONAL F.R. AVELLANEDA CENTRO DE ESTUDIANTES DE INGENIERIA TECNOLOGICA ASIGNATURA: Proyecto Final TRABAJO PRACTICO N : -- TITULO: Anteproyecto Transporte Autónomo de Cargas PROFESOR:
Juan Gil Technical Marketing Engineer
 Cree Experiencias de Aprendizaje Participativas en la Formación de Sistemas de Control Solución para Mecatrónica de NI Juan Gil Technical Marketing Engineer Los sistemas están en todas partes Motores Tesla
Cree Experiencias de Aprendizaje Participativas en la Formación de Sistemas de Control Solución para Mecatrónica de NI Juan Gil Technical Marketing Engineer Los sistemas están en todas partes Motores Tesla
ÍNDICE. Conceptos básicos de electrónica digital y analógica. Familiarización con el Kit Arduino UNO. Familiarización con el Kit Lego Mindstorm EV3
 La Robótica Educativa Objetivos generales Áreas de conocimiento Desarrollo de inteligencias Metodología Retos Recursos Contenidos Historia de la robótica ÍNDICE Conceptos básicos de electrónica digital
La Robótica Educativa Objetivos generales Áreas de conocimiento Desarrollo de inteligencias Metodología Retos Recursos Contenidos Historia de la robótica ÍNDICE Conceptos básicos de electrónica digital
INTEGRANTES David Enríquez Francisco Ortiz
 DISEÑO Y CONSTRUCCIÓN DE UN MÓDULO DIDÁCTICO SVC CON HMI INCORPORADO MEDIANTE EL PROTOCOLO ETHERNET PARA EL LABORATORIO DE CONTROL ELÉCTRICO DE LA UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE EXTENSIÓN LATACUNGA
DISEÑO Y CONSTRUCCIÓN DE UN MÓDULO DIDÁCTICO SVC CON HMI INCORPORADO MEDIANTE EL PROTOCOLO ETHERNET PARA EL LABORATORIO DE CONTROL ELÉCTRICO DE LA UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE EXTENSIÓN LATACUNGA
REPOTENCIACIÓN Y MODERNIZACIÓN DE UN MONTACARGAS ELÉCTRICO DE PASILLO ANGOSTO CON EXTENSOR MARCA CATERPILLAR PARA LA EMPRESA FAVAG
 REPOTENCIACIÓN Y MODERNIZACIÓN DE UN MONTACARGAS ELÉCTRICO DE PASILLO ANGOSTO CON EXTENSOR MARCA CATERPILLAR PARA LA EMPRESA FAVAG David Aguirre Xavier molina Índice 1 2 3 4 5 6 Introducción Características
REPOTENCIACIÓN Y MODERNIZACIÓN DE UN MONTACARGAS ELÉCTRICO DE PASILLO ANGOSTO CON EXTENSOR MARCA CATERPILLAR PARA LA EMPRESA FAVAG David Aguirre Xavier molina Índice 1 2 3 4 5 6 Introducción Características
Máster en Ingª Mecatrónica Tercer Semestre. Mecatrónica Industrial
 Máster en Ingª Mecatrónica Tercer Semestre Mecatrónica Industrial Fabricación de Sistemas Mecatrónicos Montaje y Verificación del Prototipo (Parte de Automatización) Ignacio Alvarez García 3er Semestre
Máster en Ingª Mecatrónica Tercer Semestre Mecatrónica Industrial Fabricación de Sistemas Mecatrónicos Montaje y Verificación del Prototipo (Parte de Automatización) Ignacio Alvarez García 3er Semestre
UNIVERSIDAD NACIONAL DEL SANTA FACULTAD DE INGENIERÍA DEPARTAMENTO ACADÉMICO DE ENERGÍA Y FÍSICA INFORME DE INVESTIGACIÓN
 UNIVERSIDAD NACIONAL DEL SANTA FACULTAD DE INGENIERÍA DEPARTAMENTO ACADÉMICO DE ENERGÍA Y FÍSICA INFORME DE INVESTIGACIÓN Construcción de un instrumento virtual para medir la dirección del viento, utilizando
UNIVERSIDAD NACIONAL DEL SANTA FACULTAD DE INGENIERÍA DEPARTAMENTO ACADÉMICO DE ENERGÍA Y FÍSICA INFORME DE INVESTIGACIÓN Construcción de un instrumento virtual para medir la dirección del viento, utilizando
Diseño e Implementación de un Sistema de Monitoreo Energético en el Campus. Rodríguez Lara Espe Extensión Latacunga
 Diseño e Implementación de un Sistema de Monitoreo Energético en el Campus Rodríguez Lara Espe Extensión Latacunga EJECUTOR DEL PROYECTO: Oscar Rodríguez DIRECTOR DEL PROYECTO: Ing. Diego Ortiz V CODIRECTOR
Diseño e Implementación de un Sistema de Monitoreo Energético en el Campus Rodríguez Lara Espe Extensión Latacunga EJECUTOR DEL PROYECTO: Oscar Rodríguez DIRECTOR DEL PROYECTO: Ing. Diego Ortiz V CODIRECTOR
CONTENIDOS MÍNIMOS CONTENIDOS MÍNIMOS 2º ESO
 CONTENIDOS MÍNIMOS CONTENIDOS MÍNIMOS 2º ESO 1. Proceso de resolución de problemas tecnológicos. - La Tecnología. Definición, historia e influencia en la sociedad - Proceso de resolución técnica de problemas.
CONTENIDOS MÍNIMOS CONTENIDOS MÍNIMOS 2º ESO 1. Proceso de resolución de problemas tecnológicos. - La Tecnología. Definición, historia e influencia en la sociedad - Proceso de resolución técnica de problemas.
ESPECIFICACIONES MATERIALES UTILIZADOS
 Contenido Capítulo 1 INTRODUCCIÓN... 17 1.1 Introducción general... 17 1.2 Hipótesis de trabajo... 18 1.3 Objetivos... 18 1.3.1 Objetivo general... 18 1.3.2 Objetivos específicos... 18 1.4 Área de estudio
Contenido Capítulo 1 INTRODUCCIÓN... 17 1.1 Introducción general... 17 1.2 Hipótesis de trabajo... 18 1.3 Objetivos... 18 1.3.1 Objetivo general... 18 1.3.2 Objetivos específicos... 18 1.4 Área de estudio
DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN
 DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN PROYECTO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTRÓNICA E INSTRUMENTACIÓN CHICAISA
DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN PROYECTO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTRÓNICA E INSTRUMENTACIÓN CHICAISA
DEPARTAMENTO DE ENERGÍA Y MECÁNICA
 DEPARTAMENTO DE ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ DISEÑO, CONSTRUCCIÓN E IMPLEMENTACIÓN DE UN ASIENTO DE POTENCIA CON 3 GRADOS DE LIBERTAD PARA LA ASOCIACIÓN DE DISCAPACITADOS MERCEDES
DEPARTAMENTO DE ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ DISEÑO, CONSTRUCCIÓN E IMPLEMENTACIÓN DE UN ASIENTO DE POTENCIA CON 3 GRADOS DE LIBERTAD PARA LA ASOCIACIÓN DE DISCAPACITADOS MERCEDES
CARRERA DE INGENIERIA DE SISTEMAS
 COMPUTACIÓN GRÁFICA CARRERA DE INGENIERIA DE SISTEMAS Act. Mayo 14 2013 ASIGNATURAS DE ÉNFASIS OFRECIDAS PARA LA CARRERA COMPUTACIÓN GRÁFICA 4189 Introducción a la Computación Gráfica 3 21801 Interacción
COMPUTACIÓN GRÁFICA CARRERA DE INGENIERIA DE SISTEMAS Act. Mayo 14 2013 ASIGNATURAS DE ÉNFASIS OFRECIDAS PARA LA CARRERA COMPUTACIÓN GRÁFICA 4189 Introducción a la Computación Gráfica 3 21801 Interacción
T E S I N A D E S E M I N A R I O D E G R A D U AC I O N : I N T E G R A N T E S :
 T E S I N A D E S E M I N A R I O D E G R A D U AC I O N : I N T E G R A N T E S : ANTECEDENDES INTERFAZ: Q u é e s? : Es la conexión entre dos ordenadores o máquinas de cualquier tipo dando una comunicación
T E S I N A D E S E M I N A R I O D E G R A D U AC I O N : I N T E G R A N T E S : ANTECEDENDES INTERFAZ: Q u é e s? : Es la conexión entre dos ordenadores o máquinas de cualquier tipo dando una comunicación
Monitoreo y control de la posición angular de una cámara.
 Monitoreo y control de la posición angular de una cámara. Héctor Bonilla Barranco, Aarón E. López Luna, Daniel Ortiz Hernández, Ángel Bulmaro Sánchez Rubio Benemérita universidad autónoma de Puebla 4 Sur
Monitoreo y control de la posición angular de una cámara. Héctor Bonilla Barranco, Aarón E. López Luna, Daniel Ortiz Hernández, Ángel Bulmaro Sánchez Rubio Benemérita universidad autónoma de Puebla 4 Sur
ROBÓTICA Coordinador: M.A. JUAN ERNESTO TREVIÑO FLORES
 UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN PREPARATORIA 8 Requisitos para presentar 3ª,5ª y/o 6ª Oportunidad Periodo Escolar: agosto diciembre 2018 ROBÓTICA Coordinador: M.A. JUAN ERNESTO TREVIÑO FLORES Contenido
UNIVERSIDAD AUTÓNOMA DE NUEVO LEÓN PREPARATORIA 8 Requisitos para presentar 3ª,5ª y/o 6ª Oportunidad Periodo Escolar: agosto diciembre 2018 ROBÓTICA Coordinador: M.A. JUAN ERNESTO TREVIÑO FLORES Contenido
Tutor: Ing. Eddie Galarza. Autores: Juan Carlos Chiza Llambo Jimmy Fernando Vilatuña Espín
 DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA PARA LA GESTIÓN DE PARQUEADEROS DE LA UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L UTILIZANDO ALGORITMO SURF PROGRAMADO EN SOFTWARE LIBRE Autores: Juan Carlos Chiza Llambo
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA PARA LA GESTIÓN DE PARQUEADEROS DE LA UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L UTILIZANDO ALGORITMO SURF PROGRAMADO EN SOFTWARE LIBRE Autores: Juan Carlos Chiza Llambo
CALENDARIO EXÁMENES 2015/2016 Grado en Ingeniería Informática Doble Grado en Ingeniería Informática y Matemáticas Ingeniería Informática
 Grado en Doble Grado en y Matemáticas Tit Curso Nombre Fecha Turno Aula/s GI 1 Fundamentos Físicos y Tecnológicos 01-sep M 0.1* - 0.6* GIM 1 Fundamentos Físicos y Tecnológicos 01-sep M 0.1* - 0.6* II 5
Grado en Doble Grado en y Matemáticas Tit Curso Nombre Fecha Turno Aula/s GI 1 Fundamentos Físicos y Tecnológicos 01-sep M 0.1* - 0.6* GIM 1 Fundamentos Físicos y Tecnológicos 01-sep M 0.1* - 0.6* II 5
Ing. Roberto Luis Muñoz Coordinador de Unidad Técnica Electrónica del INTI de Argentina
 Medición de Velocidad de Automotores Destinada a Promover la Seguridad Vial Ing. Roberto Luis Muñoz Coordinador de Unidad Técnica Electrónica del INTI de Argentina 17 de Mayo 2012 Cinemómetros - Definiciones
Medición de Velocidad de Automotores Destinada a Promover la Seguridad Vial Ing. Roberto Luis Muñoz Coordinador de Unidad Técnica Electrónica del INTI de Argentina 17 de Mayo 2012 Cinemómetros - Definiciones
UNIDAD 3 LAS TIC COMO FUENTES DE INVESTIGACIÓN Y DIFUSIÓN DE INFORMACIÓN INSTITUTO CATÓLICO SAN FRANCISCO DE ASÍS PTO.
 UNIDAD 3 LAS TIC COMO FUENTES DE INVESTIGACIÓN Y DIFUSIÓN DE INFORMACIÓN INSTITUTO CATÓLICO SAN FRANCISCO DE ASÍS PTO. DE LA LIBERTAD INFORMÁTICA II PROF. JOSÉ ELÍAS REYES MORENO REDES INFORMÁTICAS INFORMATICA
UNIDAD 3 LAS TIC COMO FUENTES DE INVESTIGACIÓN Y DIFUSIÓN DE INFORMACIÓN INSTITUTO CATÓLICO SAN FRANCISCO DE ASÍS PTO. DE LA LIBERTAD INFORMÁTICA II PROF. JOSÉ ELÍAS REYES MORENO REDES INFORMÁTICAS INFORMATICA
PROYECTO DE GRADO PREVIO A LA OBTENCIÓN DEL TÍTULO ACADÉMICO DE: INGENIERO AUTOMOTRIZ TEMA:
 PROYECTO DE GRADO PREVIO A LA OBTENCIÓN DEL TÍTULO ACADÉMICO DE: INGENIERO AUTOMOTRIZ TEMA: DISEÑO E INSTALACIÓN DE UN SISTEMA DE RASTREO SATELITAL MEDIANTE GPS Y GPRS PARA EL VEHÍCULO CHEVROLET-AVEO DE
PROYECTO DE GRADO PREVIO A LA OBTENCIÓN DEL TÍTULO ACADÉMICO DE: INGENIERO AUTOMOTRIZ TEMA: DISEÑO E INSTALACIÓN DE UN SISTEMA DE RASTREO SATELITAL MEDIANTE GPS Y GPRS PARA EL VEHÍCULO CHEVROLET-AVEO DE
2.2. INGENIERIA DE SISTEMAS
 MODULO II Ingeniería de Software INF - 163 2.2. INGENIERIA DE SISTEMAS 24/03/11 Resumen preparado por Miguel Cotaña 1 La IS ocurre como consecuencia de un proceso llamado ingeniería de sistemas. En lugar
MODULO II Ingeniería de Software INF - 163 2.2. INGENIERIA DE SISTEMAS 24/03/11 Resumen preparado por Miguel Cotaña 1 La IS ocurre como consecuencia de un proceso llamado ingeniería de sistemas. En lugar
Desarrollo de un Sistema de Vuelo Autónomo para Aplicaciones Forestales Utilizando LabVIEW
 Desarrollo de un Sistema de Vuelo Autónomo para Aplicaciones Forestales Utilizando LabVIEW "La estación terrena nos permite establecer la comunicación con los circuitos electrónicos a bordo, haciendo posible
Desarrollo de un Sistema de Vuelo Autónomo para Aplicaciones Forestales Utilizando LabVIEW "La estación terrena nos permite establecer la comunicación con los circuitos electrónicos a bordo, haciendo posible
SISTEMAS ROBOTIZADOS Asignatura optativa
 Área de Ingeniería de Sistemas y Automática Departamento de Lenguajes y Computación Universidad de Almería SISTEMAS ROBOTIZADOS Asignatura optativa PRACTICA 4 CONTROL DE ROBOTS MÓVILES UTILIZANDO EL MÉTODO
Área de Ingeniería de Sistemas y Automática Departamento de Lenguajes y Computación Universidad de Almería SISTEMAS ROBOTIZADOS Asignatura optativa PRACTICA 4 CONTROL DE ROBOTS MÓVILES UTILIZANDO EL MÉTODO
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L
 UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L PROYECTO DE TITULACIÓN DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE MONITOREO PARA AGUAS RESIDUALES CON TRASMISIÓN INALÁMBRICA Y ANÁLISIS DEL COMPORTAMIENTO DE LAS
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE-L PROYECTO DE TITULACIÓN DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE MONITOREO PARA AGUAS RESIDUALES CON TRASMISIÓN INALÁMBRICA Y ANÁLISIS DEL COMPORTAMIENTO DE LAS
Contenido. Capítulo 1 Bienvenido a Arduino y Visual Basic.NET 1. Capítulo 2 Aspectos generales de la programación en Visual Basic.
 Capítulo 1 Bienvenido a Arduino y Visual Basic.NET 1 1.1 Introducción 2 1.2 Entorno de programación de Arduino IDE 2 1.2.1 Funciones básicas iniciales 2 1.2.2 Agregar comentarios 3 1.3 Conceptos básicos
Capítulo 1 Bienvenido a Arduino y Visual Basic.NET 1 1.1 Introducción 2 1.2 Entorno de programación de Arduino IDE 2 1.2.1 Funciones básicas iniciales 2 1.2.2 Agregar comentarios 3 1.3 Conceptos básicos
Grado en Ingeniería de Tecnologías de Telecomunicación
 Grado en Ingeniería de Tecnologías de Telecomunicación CENTRO RESPONSABLE: ESCUELA TECNICA SUPERIOR DE INGENIEROS INDUSTRIALES Y DE TELECOMUNICACION RAMA: Ingeniería y Arquitectura CRÉDITOS: 240,00 DISTRIBUCIÓN
Grado en Ingeniería de Tecnologías de Telecomunicación CENTRO RESPONSABLE: ESCUELA TECNICA SUPERIOR DE INGENIEROS INDUSTRIALES Y DE TELECOMUNICACION RAMA: Ingeniería y Arquitectura CRÉDITOS: 240,00 DISTRIBUCIÓN
CIM Manufactura Integrada por Computadora INDICE
 INDICE CIM EN CONFIGURACIÓN BÁSICA CIM EN CONFIGURACIÓN AVANZADA CIM EN CONFIGURACIÓN COMPLETA DL CIM-A DL CIM-B DL CIM-C DL CIM-C DL CIM-A DL CIM-B NOTA: Se necesita un electro-compresor monofásico como
INDICE CIM EN CONFIGURACIÓN BÁSICA CIM EN CONFIGURACIÓN AVANZADA CIM EN CONFIGURACIÓN COMPLETA DL CIM-A DL CIM-B DL CIM-C DL CIM-C DL CIM-A DL CIM-B NOTA: Se necesita un electro-compresor monofásico como
SISTEMA DE CONTROL DE APARCAMIENTOS
 SISTEMA DE CONTROL DE APARCAMIENTOS (Código de barras) Mapinsa proporciona al cliente máquinas de bajo coste y bajo mantenimiento orientadas a aparcamientos que tengan necesidad de control de acceso de
SISTEMA DE CONTROL DE APARCAMIENTOS (Código de barras) Mapinsa proporciona al cliente máquinas de bajo coste y bajo mantenimiento orientadas a aparcamientos que tengan necesidad de control de acceso de
Banco de Proyectos 2014 propuestos para el desarrollo de Tesinas y Tesis
 Banco de Proyectos 2014 propuestos para el desarrollo de Tesinas y Tesis Programas: ESPECIALIZACIÓN EN INGENIERÍA MECATRÓNICA MAESTRÍA EN INGENIERÍA MECATRÓNICA Investigador Responsable Nombre del Proyecto
Banco de Proyectos 2014 propuestos para el desarrollo de Tesinas y Tesis Programas: ESPECIALIZACIÓN EN INGENIERÍA MECATRÓNICA MAESTRÍA EN INGENIERÍA MECATRÓNICA Investigador Responsable Nombre del Proyecto
IMPLEMENTACIÓN DE UNA RED INALÁMBRICA QUE PERMITA OPERAR UNA PLATAFORMA MÓVIL CON TRANSMISIÓN Y ALMACENAMIENTO DE VIDEO, MEDIANTE TECNOLOGÍA WIFI.
 IMPLEMENTACIÓN DE UNA RED INALÁMBRICA QUE PERMITA OPERAR UNA PLATAFORMA MÓVIL CON TRANSMISIÓN Y ALMACENAMIENTO DE VIDEO, MEDIANTE TECNOLOGÍA WIFI. UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS November
IMPLEMENTACIÓN DE UNA RED INALÁMBRICA QUE PERMITA OPERAR UNA PLATAFORMA MÓVIL CON TRANSMISIÓN Y ALMACENAMIENTO DE VIDEO, MEDIANTE TECNOLOGÍA WIFI. UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS November
CUADRICOPTERO PARA EXPLORACIÓN AÉREA EN ZONAS DE DESASTRE
 CUADRICOPTERO PARA EXPLORACIÓN AÉREA EN ZONAS DE DESASTRE Presentan: Gabriel Hernández Pérez, mec_gabriel@hotmail.com David Ángeles de la Cruz, soart.289@gmail.com RESUMEN En el Taller de Robótica Abierta
CUADRICOPTERO PARA EXPLORACIÓN AÉREA EN ZONAS DE DESASTRE Presentan: Gabriel Hernández Pérez, mec_gabriel@hotmail.com David Ángeles de la Cruz, soart.289@gmail.com RESUMEN En el Taller de Robótica Abierta
Universidad de Tarapaca
 Universidad de Tarapaca Escuela Universitaria de Ingenieria Mecanica Informe 02 Mini Impresora 3D, usando servo motores Estudiantes: Cristian Espinoza J. Francisco Saez Brain Pizarro Profesor: Dr. Cristobal
Universidad de Tarapaca Escuela Universitaria de Ingenieria Mecanica Informe 02 Mini Impresora 3D, usando servo motores Estudiantes: Cristian Espinoza J. Francisco Saez Brain Pizarro Profesor: Dr. Cristobal
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES
 INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE PROGRAMACIÓN ESTRUCTURA PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno desarrollará programas a través de algoritmos,
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE PROGRAMACIÓN ESTRUCTURA PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno desarrollará programas a través de algoritmos,
CURSO PROVINCIAL: CONTROL Y ROBÓTICA EN TECNOLOGÍA ROBÓTICA EDUCATIVA. Manuel Hidalgo Díaz Antonio Martínez Núñez
 CURSO PROVINCIAL: CONTROL Y ROBÓTICA EN TECNOLOGÍA ROBÓTICA EDUCATIVA Manuel Hidalgo Díaz Antonio Martínez Núñez Noviembre 2009 ÍNDICE ROBÓTICA... 3 ROBÓTICA EDUCATIVA... 4 EducaBot... 6 CONTROL Y ROBÓTICA
CURSO PROVINCIAL: CONTROL Y ROBÓTICA EN TECNOLOGÍA ROBÓTICA EDUCATIVA Manuel Hidalgo Díaz Antonio Martínez Núñez Noviembre 2009 ÍNDICE ROBÓTICA... 3 ROBÓTICA EDUCATIVA... 4 EducaBot... 6 CONTROL Y ROBÓTICA
Computadora de automoción AMD G-T40N Dual core 1.GHz para el sistema
 Computadora de automoción AMD G-T40N Dual core 1.GHz para el sistema de ayuda a la explotación COMPASS en configuraciones con sistema de VIDEOVIGILANCIA Mayor potencia para funciones de videovigilancia
Computadora de automoción AMD G-T40N Dual core 1.GHz para el sistema de ayuda a la explotación COMPASS en configuraciones con sistema de VIDEOVIGILANCIA Mayor potencia para funciones de videovigilancia
Automatización Industrial y Robótica PLANIFICACIONES Actualización: 1ºC/2018. Planificaciones Automatización Industrial y Robótica
 Planificaciones 9206 - Automatización Industrial y Robótica Docente responsable: NITTI ALEJANDRO LEONARDO 1 de 7 OBJETIVOS Introducir a los estudiantes en el diseño, especificación y desarrollo de sistemas
Planificaciones 9206 - Automatización Industrial y Robótica Docente responsable: NITTI ALEJANDRO LEONARDO 1 de 7 OBJETIVOS Introducir a los estudiantes en el diseño, especificación y desarrollo de sistemas
Control de Motores y Visión Artificial para Celdas de Manufactura
 Control de Motores y Visión Artificial para Celdas de Manufactura Salvador Mikel Academic Program Manager National Instruments Mexico Agenda Aplicaciones y Sistemas de Control de Movimiento Plataforma
Control de Motores y Visión Artificial para Celdas de Manufactura Salvador Mikel Academic Program Manager National Instruments Mexico Agenda Aplicaciones y Sistemas de Control de Movimiento Plataforma
UNIVERSIDAD MAYOR DE SAN ANDRÉS FACULTAD DE CIENCIAS PURAS Y NATURALES CARRERA DE INFORMÁTICA
 UNIVERSIDAD MAYOR DE SAN ANDRÉS FACULTAD DE CIENCIAS PURAS Y NATURALES CARRERA DE INFORMÁTICA TESIS DE GRADO INTEGRACIÓN DE SISTEMAS DOMÓTICOS MULTIMEDIA Y COMUNICACIÓN EN EL HOGAR AUTOR: COARITE MAMANI
UNIVERSIDAD MAYOR DE SAN ANDRÉS FACULTAD DE CIENCIAS PURAS Y NATURALES CARRERA DE INFORMÁTICA TESIS DE GRADO INTEGRACIÓN DE SISTEMAS DOMÓTICOS MULTIMEDIA Y COMUNICACIÓN EN EL HOGAR AUTOR: COARITE MAMANI
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE INTEGRACIÓN DE SISTEMAS AUTOMÁTICOS
 TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE INTEGRACIÓN DE SISTEMAS AUTOMÁTICOS 1. Competencias Desarrollar y conservar sistemas automatizados
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE INTEGRACIÓN DE SISTEMAS AUTOMÁTICOS 1. Competencias Desarrollar y conservar sistemas automatizados
Tecnología. Características del proyecto técnico escolar.
 Tecnología 1. Producción, transformación, transporte y distribución de energía. Técnicas de ahorro energético. Nuevos métodos de producción energéticos. 1.1 Fuentes de energía. Energías alternativas. 1.2
Tecnología 1. Producción, transformación, transporte y distribución de energía. Técnicas de ahorro energético. Nuevos métodos de producción energéticos. 1.1 Fuentes de energía. Energías alternativas. 1.2
INGENIERÍA AUTOMOTRIZ
 INGENIERÍA AUTOMOTRIZ DISEÑO Y CONSTRUCCIÓN DE UN BANCO DE PRUEBAS DINAMOMÉTRICO PARA MOTOS DE 125 CENTÍMETROS CÚBICOS DIRECTOR: Ing. Guido Torres CODIRECTOR: Ing. Juan Rocha AUTORES: Iván Cando P. Israel
INGENIERÍA AUTOMOTRIZ DISEÑO Y CONSTRUCCIÓN DE UN BANCO DE PRUEBAS DINAMOMÉTRICO PARA MOTOS DE 125 CENTÍMETROS CÚBICOS DIRECTOR: Ing. Guido Torres CODIRECTOR: Ing. Juan Rocha AUTORES: Iván Cando P. Israel
CONTROL DE DISTANCIA DE SEGURIDAD EN ADELANTAMIENTOS A BICICLETAS
 CONTROL DE DISTANCIA DE SEGURIDAD EN ADELANTAMIENTOS A BICICLETAS Enrique Tortajada González Grado de Tecnologías de Telecomunicación 05.663 TFG Arduino Consultor: Antoni Morell Pérez Profesor responsable
CONTROL DE DISTANCIA DE SEGURIDAD EN ADELANTAMIENTOS A BICICLETAS Enrique Tortajada González Grado de Tecnologías de Telecomunicación 05.663 TFG Arduino Consultor: Antoni Morell Pérez Profesor responsable
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES
 INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE SISTEMAS DE VISIÓN ARTIFICIAL PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno implementará sistemas de visión artificial
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE SISTEMAS DE VISIÓN ARTIFICIAL PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno implementará sistemas de visión artificial
Sistemas Electrónicos Especialidad del Grado de Ingeniería de Tecnologías de Telecomunicación
 Especialidad del Grado de Ingeniería de Tecnologías de Telecomunicación Charlas Informativas sobre las Especialidades de los Grados E.T.S.I.I.T. Jesús Banqueri Ozáez Departamento de Electrónica y Tecnología
Especialidad del Grado de Ingeniería de Tecnologías de Telecomunicación Charlas Informativas sobre las Especialidades de los Grados E.T.S.I.I.T. Jesús Banqueri Ozáez Departamento de Electrónica y Tecnología
Características Técnicas Específicas de la Cámara IP FoscamSilver 24Leds Definición Velocidad. Dimensiones con Peso Imágenes
 Características Generales de la Cámara IP FoscamSilver 24Leds La Cámara IP FoscamSilver 24Leds VentDepot, es una cámara IP inalámbrica integrada para uso en exteriores. Tiene una cámara de video digital
Características Generales de la Cámara IP FoscamSilver 24Leds La Cámara IP FoscamSilver 24Leds VentDepot, es una cámara IP inalámbrica integrada para uso en exteriores. Tiene una cámara de video digital
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ
 DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ AUTORES: ANDRÉS FERNANDO ERAZO CRIOLLO EDWIN PAUL LISINTUÑA TOAPANTA TEMA: DISEÑO, CONSTRUCCIÓN E IMPLEMENTACIÓN DE UN
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ AUTORES: ANDRÉS FERNANDO ERAZO CRIOLLO EDWIN PAUL LISINTUÑA TOAPANTA TEMA: DISEÑO, CONSTRUCCIÓN E IMPLEMENTACIÓN DE UN
AUTOMATIZACIÓN INDUSTRIAL
 Departamento de Ingenieria de Sistemas y Automática AUTOMATIZACIÓN INDUSTRIAL 1 AUTOMATIZACION INDUSTRIAL 2 AUTOMATIZACION INDUSTRIAL 3 AUTOMATAS PROGRAMABLES Surgen de la necesidad de controlar automáticamente
Departamento de Ingenieria de Sistemas y Automática AUTOMATIZACIÓN INDUSTRIAL 1 AUTOMATIZACION INDUSTRIAL 2 AUTOMATIZACION INDUSTRIAL 3 AUTOMATAS PROGRAMABLES Surgen de la necesidad de controlar automáticamente
ANEXO II GUÍA DE PROYECTOS PARA ESTANCIAS CORTAS EN EL CENTRO NASA ANEXO II GUÍA DE PROYECTOS. Convocatoria. Oportunidad de. Estancias en la AEM.
 ANEXO II GUÍA DE PROYECTOS PARA ESTANCIAS CORTAS EN EL CENTRO NASA ANEXO II GUÍA DE PROYECTOS Convocatoria Oportunidad de Estancias en la AEM (Agencia Espacial Mexicana) para Estudiantes Mexicanos de Educación
ANEXO II GUÍA DE PROYECTOS PARA ESTANCIAS CORTAS EN EL CENTRO NASA ANEXO II GUÍA DE PROYECTOS Convocatoria Oportunidad de Estancias en la AEM (Agencia Espacial Mexicana) para Estudiantes Mexicanos de Educación
LÓPEZ, J. SANTO, M. Septiembre 2014.
 DISEÑO Y CONSTRUCCIÓN DE UNA MÁQUINA DE CORTE LONGITUDINAL Y TRANSVERSAL DE LÁMINAS DE PLÁSTICO PVC CON UN SISTEMA HMI PARA LA INDUSTRIA PLÁSTICA BROTHER S LÓPEZ, J. SANTO, M. Septiembre 2014. OBJETIVO
DISEÑO Y CONSTRUCCIÓN DE UNA MÁQUINA DE CORTE LONGITUDINAL Y TRANSVERSAL DE LÁMINAS DE PLÁSTICO PVC CON UN SISTEMA HMI PARA LA INDUSTRIA PLÁSTICA BROTHER S LÓPEZ, J. SANTO, M. Septiembre 2014. OBJETIVO
Robótica I ACB Participantes Comité para el Diseño de Especialidad de la DIET. Academia de Sistemas Digitales de la DIET
 1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
Nombre del Laboratorio: LHE-0316 Sistema de entrenamiento en Hidráulica y Electrohidráulica.
 Nombre del Laboratorio: LHE-0316 Sistema de entrenamiento en Hidráulica y Electrohidráulica. Objetivo: El objetivo de este equipo didáctico es conocer el funcionamiento y la construcción de los diferentes
Nombre del Laboratorio: LHE-0316 Sistema de entrenamiento en Hidráulica y Electrohidráulica. Objetivo: El objetivo de este equipo didáctico es conocer el funcionamiento y la construcción de los diferentes
Maestría en. Plan de
 Maestría en Plan de MODALIDADES El programa de Maestría en Ingeniería Electrónica está concebido para permitir una alta flexibilidad. Cada estudiante puede diseñar su propio plan de trabajo de acuerdo
Maestría en Plan de MODALIDADES El programa de Maestría en Ingeniería Electrónica está concebido para permitir una alta flexibilidad. Cada estudiante puede diseñar su propio plan de trabajo de acuerdo
LEGO MINDSTORMS Education
 LEGO MINDSTORMS Education Hay un nuevo robot en la Clase Con LEGO MINDSTORMS Education tu mayor reto será que tus estudiantes salgan del salón de clases! La versión más nueva está aquí! EV3 de LEGO MINDSTORMS
LEGO MINDSTORMS Education Hay un nuevo robot en la Clase Con LEGO MINDSTORMS Education tu mayor reto será que tus estudiantes salgan del salón de clases! La versión más nueva está aquí! EV3 de LEGO MINDSTORMS
ascendeo Iberia - C. Les Planes 2-4 Polígono Fontsanta Sant Joan Despí Barcelona ROBOT INALÁMBRICO CON CÁMARA DE SEGURIDAD APPBOT LINK
 ascendeo Iberia - C. Les Planes 2-4 Polígono Fontsanta 08970 Sant Joan Despí Barcelona ROBOT INALÁMBRICO CON CÁMARA DE SEGURIDAD APPBOT LINK Descansa tranquilo Visualización en tiempo real & acceso remoto
ascendeo Iberia - C. Les Planes 2-4 Polígono Fontsanta 08970 Sant Joan Despí Barcelona ROBOT INALÁMBRICO CON CÁMARA DE SEGURIDAD APPBOT LINK Descansa tranquilo Visualización en tiempo real & acceso remoto
3. Pan & Tilt. 3.1.Parte mecánica del pan & tilt
 3. Pan & Tilt Para poder orientar la cámara tanto horizontalmente como verticalmente, se ha montado sobre un pan & tilt. Así, de esta forma, es posible ajustar el ángulo horizontal (Pan) y el vertical
3. Pan & Tilt Para poder orientar la cámara tanto horizontalmente como verticalmente, se ha montado sobre un pan & tilt. Así, de esta forma, es posible ajustar el ángulo horizontal (Pan) y el vertical
TEMARIO PARA EL ACCESO AL CUERPO DE PROFESORES DE ENSEÑANZA SECUNDARIA
 TEMARIO PARA EL ACCESO AL CUERPO DE PROFESORES DE ENSEÑANZA SECUNDARIA ESPECIALIDAD: TECNOLOGÍA (Orden EDU/3138/2011, de 15 de noviembre, por la que se aprueban los temarios que han de regir en los procedimientos
TEMARIO PARA EL ACCESO AL CUERPO DE PROFESORES DE ENSEÑANZA SECUNDARIA ESPECIALIDAD: TECNOLOGÍA (Orden EDU/3138/2011, de 15 de noviembre, por la que se aprueban los temarios que han de regir en los procedimientos
PROPUESTA DE TRABAJOS FIN DE GRADO Curso
 PROPUESTA DE TRABAJOS FIN DE GRADO Curso 2017-2018 Carlos Catalán (ccatalan@unizar.es) Alfonso Blesa (ablesa@unizar.es) Sistema distribuido de control y monitorización de un vehículo Se utilizará el computador
PROPUESTA DE TRABAJOS FIN DE GRADO Curso 2017-2018 Carlos Catalán (ccatalan@unizar.es) Alfonso Blesa (ablesa@unizar.es) Sistema distribuido de control y monitorización de un vehículo Se utilizará el computador
IMPLEMENTACIÓN DE UNA RED INALÁMBRICA QUE PERMITA OPERAR UNA PLATAFORMA MÓVIL CON TRANSMISIÓN Y ALMACENAMIENTO DE VIDEO, MEDIANTE TECNOLOGÍA WIFI
 IMPLEMENTACIÓN DE UNA RED INALÁMBRICA QUE PERMITA OPERAR UNA PLATAFORMA MÓVIL CON TRANSMISIÓN Y ALMACENAMIENTO DE VIDEO, MEDIANTE TECNOLOGÍA WIFI UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS INTEGRANTES
IMPLEMENTACIÓN DE UNA RED INALÁMBRICA QUE PERMITA OPERAR UNA PLATAFORMA MÓVIL CON TRANSMISIÓN Y ALMACENAMIENTO DE VIDEO, MEDIANTE TECNOLOGÍA WIFI UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS INTEGRANTES
HORARIO DE LABORATORIOS , PRIMER SEMESTRE
 HORARIO DE LABORATORIOS 2016-2017, PRIMER SEMESTRE 8:00-9:00 Instalaciones Eléctricas 9:00-10:00 Instalaciones Eléctricas Aula de Informática 1 Instalaciones Eléctricas Instalaciones Eléctricas 10:00-11:00
HORARIO DE LABORATORIOS 2016-2017, PRIMER SEMESTRE 8:00-9:00 Instalaciones Eléctricas 9:00-10:00 Instalaciones Eléctricas Aula de Informática 1 Instalaciones Eléctricas Instalaciones Eléctricas 10:00-11:00
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES
 INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE SISTEMAS ELECTRÓNICOS DE INTERFAZ PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno integrará circuitos de interfaz empleando
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE SISTEMAS ELECTRÓNICOS DE INTERFAZ PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno integrará circuitos de interfaz empleando
MAESTRÍA EN ELECTRÓNICA Y AUTOMATIZACIÓN, MENCIÓN SISTEMAS DE CONTROL. Malla Curricular
 MAESTRÍA EN ELECTRÓNICA Y AUTOMATIZACIÓN, MENCIÓN SISTEMAS DE CONTROL Remitir su hoja de vida y documentación de respaldo al correo: edgarpcordovac@uta.edu.ec Sistemas Eléctricos y Electrónicos Titulación
MAESTRÍA EN ELECTRÓNICA Y AUTOMATIZACIÓN, MENCIÓN SISTEMAS DE CONTROL Remitir su hoja de vida y documentación de respaldo al correo: edgarpcordovac@uta.edu.ec Sistemas Eléctricos y Electrónicos Titulación
Centro Nacional de Investigación y Desarrollo Tecnológico
 Centro Nacional de Investigación y Desarrollo Tecnológico www..edu.mx Conocimiento y tecnología al servicio de México 1 AGENDA I. EL CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOLÓGICO (CENIDET-
Centro Nacional de Investigación y Desarrollo Tecnológico www..edu.mx Conocimiento y tecnología al servicio de México 1 AGENDA I. EL CENTRO NACIONAL DE INVESTIGACIÓN Y DESARROLLO TECNOLÓGICO (CENIDET-
Convocatoria Oportunidad de Estancias Cortas a distancia en laaem
 ANEXO II GUÍA DE PROYECTOS Convocatoria Oportunidad de Estancias Cortas a distancia en laaem (Agencia Espacial Mexicana ) Para Estudiantes Mexicanos De Educación Superior Primer periodo de 2019 (del 25
ANEXO II GUÍA DE PROYECTOS Convocatoria Oportunidad de Estancias Cortas a distancia en laaem (Agencia Espacial Mexicana ) Para Estudiantes Mexicanos De Educación Superior Primer periodo de 2019 (del 25
Firma. Firma. Nombre del proyecto de integración (PI): Diseño, construcción y control de un brazo robótico de 5 grados de libertad.
: Diseño, construcción y control de un brazo robótico de 5 grados de libertad.") Nombre del proyecto de integración (PI): Diseño, construcción y control de un brazo robótico de 5 grados de libertad. Modalidad: Proyecto tecnológico. Versión: Primera Trimestre Lectivo: 18 P Alumnos:
Nombre del proyecto de integración (PI): Diseño, construcción y control de un brazo robótico de 5 grados de libertad. Modalidad: Proyecto tecnológico. Versión: Primera Trimestre Lectivo: 18 P Alumnos:
SISTEMA DE ADQUISICIÓN Y VISUALIZACIÓN DE PARÁMETROS BRINDADOS POR MÓDULO GPS
 SISTEMA DE ADQUISICIÓN Y VISUALIZACIÓN DE PARÁMETROS BRINDADOS POR MÓDULO GPS Perassi, Matías 1 ; Barbero, Mauro 2 ; Secrestat, Nicolás 3 ; Peretti, Gastón 4 1 Alumno Universidad Tecnológica Nacional Facultad
SISTEMA DE ADQUISICIÓN Y VISUALIZACIÓN DE PARÁMETROS BRINDADOS POR MÓDULO GPS Perassi, Matías 1 ; Barbero, Mauro 2 ; Secrestat, Nicolás 3 ; Peretti, Gastón 4 1 Alumno Universidad Tecnológica Nacional Facultad
SISTEMA DE IDENTIFICACIÓN DE IMÁGENES
 SISTEMA DE IDENTIFICACIÓN DE IMÁGENES Alfredo E. Ríos Arellanes (a00755835@itesm.mx), Pablo E. Campos Santillán (a01230443@itesm.mx), Jean K. Camarillo De la Cruz (a00947508@itesm.mx), Luis Henning Salinas
SISTEMA DE IDENTIFICACIÓN DE IMÁGENES Alfredo E. Ríos Arellanes (a00755835@itesm.mx), Pablo E. Campos Santillán (a01230443@itesm.mx), Jean K. Camarillo De la Cruz (a00947508@itesm.mx), Luis Henning Salinas
SILABO DEL CURSO DE ENSAMBLAJE, MANTENIMIENTO Y REPARACIÓN DE COMPUTADORAS, REDES INALÁMBRICAS Y SISTEMA DE SEGURIDAD
 SILABO DEL CURSO DE ENSAMBLAJE, MANTENIMIENTO Y REPARACIÓN DE COMPUTADORAS, REDES INALÁMBRICAS Y SISTEMA DE SEGURIDAD I. INFORMACIÓN GENERAL 1.1. Nombre del Curso : Ensamblaje, mantenimiento y reparación
SILABO DEL CURSO DE ENSAMBLAJE, MANTENIMIENTO Y REPARACIÓN DE COMPUTADORAS, REDES INALÁMBRICAS Y SISTEMA DE SEGURIDAD I. INFORMACIÓN GENERAL 1.1. Nombre del Curso : Ensamblaje, mantenimiento y reparación
Para este tipo de programación que se realizó se puede concluir que funcionó de
 Capítulo 6: Pruebas y conclusiones 6.1 Pruebas Para este tipo de programación que se realizó se puede concluir que funcionó de manera adecuada ya que el móvil sube de nivel como se propuso. Con esto el
Capítulo 6: Pruebas y conclusiones 6.1 Pruebas Para este tipo de programación que se realizó se puede concluir que funcionó de manera adecuada ya que el móvil sube de nivel como se propuso. Con esto el
Diadema Inalámbrica para Controlar Silla de Ruedas para Personas Tetrapléjicas
 Diadema Inalámbrica para Controlar Silla de Ruedas para Personas Tetrapléjicas Román Osorio, Elizabeth Coria 1, Rocío Santiago 1. Departamento de Ingeniería de Sistemas Computacionales y Automatización
Diadema Inalámbrica para Controlar Silla de Ruedas para Personas Tetrapléjicas Román Osorio, Elizabeth Coria 1, Rocío Santiago 1. Departamento de Ingeniería de Sistemas Computacionales y Automatización