Mena Guevara José Gabriel Latacunga, 2014
|
|
|
- Alicia Soto Díaz
- hace 7 años
- Vistas:
Transcripción
1 DISEÑO Y CONSTRUCCIÓN DE LA ESTRUCTURA DE UN BRAZO ROBÓTICO CON SEIS GRADOS DE LIBERTAD, APLICANDO INGENIERÍA INVERSA PARA LA UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE EXTENSIÓN LATACUNGA. Mena Guevara José Gabriel Latacunga, 2014
2 OBJETIVO GENERAL Diseñar y construir la estructura de un Brazo Robótico con seis grados de libertad, aplicando ingeniería inversa para la Universidad de las Fuerzas Armadas ESPE Extensión Latacunga.
3 CAPITULO I FUNDAMENTO TEÓRICO Recompilar información proveniente de artículos técnicos, libros, monografías, tesis o ensayos sobre el diseño de Brazos Robóticos con seis grados de libertad.




4 DEFINICIÓN DEL PROBLEMA



5 ALCANCE + +
6 ESTADO DE LA CIENCIA Materiales Peso Mecanizado y formación Costo Disponibilidad Anatomía del robot Brazo robótico Cinemática del Robot Manipulador El criterio de Grübler-Kutzbach
7 Grübler-Kutzbach Es el más acertado para determinar los grados de libertad de un sistema mecánico plano. m = 3 n 1 2j 1 j 2 m, movilidad. n, número de eslabones de un mecanismo. j1, número de uniones de 1 grado de libertad. j2, número de uniones de 2 grados de libertad.
8 MECÁNICA DEL ROBOT CRUSTCRAWLER
9 MECÁNICA DEL ROBOT CRUSTCRAWLER Motor DYNAMIXEL MX-28T. Motor DYNAMIXEL MX-64T. Motor DYNAMIXEL MX-106T. Peso, Torque, Dimensiones




10 DESARROLLO DE FUNCIÓN DE CALIDAD
11 SOFTWARE MATLAB, estudio cinemático. COMSOL, estudio estático. SOLIDWORKS, modelado. SOLIDTHINKING, morfogénesis.
12 CAPITULO II METODOLOGÍA DE LA INVESTIGACIÓN Diseñar e implementar un prototipo digital de la estructura del Brazo Robótico mediante el uso de CAD. Realizar la simulación de fuerzas actuantes, momentos y del movimiento sobre la estructura del Brazo Robótico mediante el uso de CAE. Realizar ingeniería inversa y morfogénesis al Brazo Robótico CrustCrawler y recompilar datos estructurales útiles para la ejecución del proyecto para obtener un modelo matemático con la ayuda de CAE que cumpla con las exigencias de diseño a realizarse en la estructura del Brazo Robótico. Generar una base de datos con la información para de esta forma realizar una comparación con los datos pre-configurados.


13 MODELADO Para la medición de cada pieza se utilizó un Pie de Rey Digital y como referencia adicional se tiene los planos de los tres modelos de servo motores DYNAMIXEL MX.
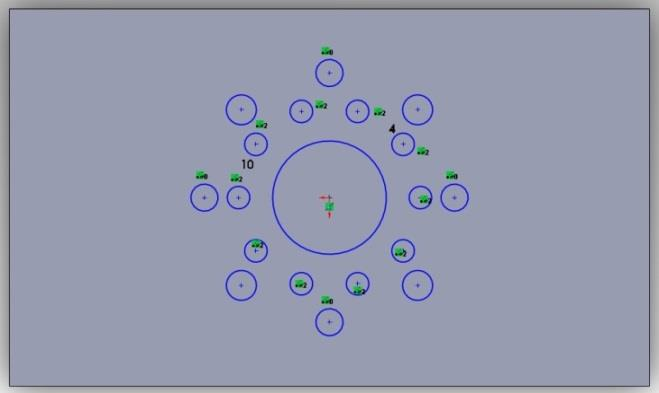

14 MODELADO
15 MODELADO Servo Motor DYNAMIXEL MX-106T. Dos articulaciones, un adaptador de placa doble, un adaptador de placa simple, una viga de 127mm, dos bases para servo motor, una mesa giratoria y un disco de 113mm. Servo Motor DYNAMIXEL MX-64T. Tres articulaciones, dos adaptador de placa simple, una viga de 63.5mm, cinco bases para servo motor y dos adaptadores tipo L. Servo Motor DYNAMIXEL MX-28T. Dos articulaciones para pinza, una base para servo motor reducida y un juego de pinzas.
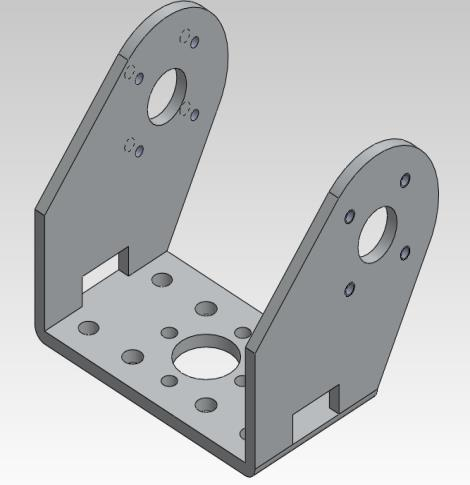






16 MODELADO
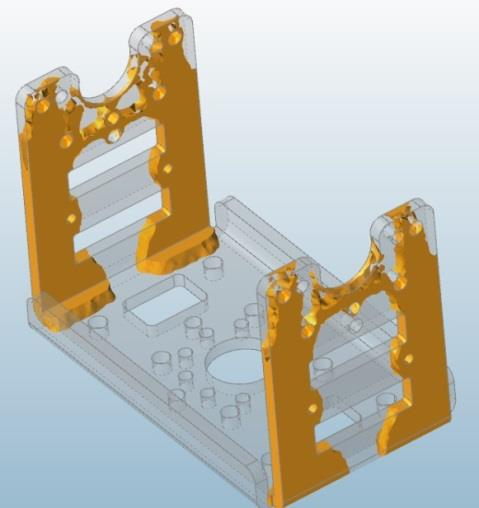
17 MORFOGÉNESIS Nombre Masa(gr) Adaptador de Placa Simple 9 Adaptador de Placa Doble 18 Viga de 127mm 56 Viga de 63.5mm 47 Adaptador Tipo L 9 Articulación 22 Articulación para pinza 15 Base para Servo Motores 10 Se colocó los soportes en la cara inferior del objeto, momentos en los laterales cuyo valor es de 1000Ncm y cargas de 1000N, se procedió a optimizar el sólido desde el 5% hasta el 50%
18 OPTIMIZACIÓN DE MASAS % masa(gr)







19 OPTIMIZACIÓN DE MASAS

20 CINEMÁTICA DEL ROBOT
21 CINEMÁTICA DEL ROBOT i α i 1 a i 1 θ i d i 1 α 0 0 θ a 1 θ a 2 θ a 3 θ α La articulación 1 y 5 son capaces de girar con respecto al eje X mientras que las otras tres exclusivamente lo hacen con respecto al eje Z. La articulación 5 no se desplaza sobre el eje Z y adopta el ángulo y desplazamiento en el eje X de la Articulación 4.
22 CINEMÁTICA DEL ROBOT Eslabón Componentes Masa(gr) Dist(mm) 1 Articulación (2), Viga de 127mm, Adaptador de Placa Doble, Motor DYNAMIXEL MX106T, Base para Servo Motor, Adaptador Placa Simple. 2 Articulación, Viga de 63.5mm, Adaptador de Placa Simple (2), Motor DYNAMIXEL MX64T, Base para Servo Motor. 3 Articulación, Motor DYNAMIXEL MX64T, Base para Servo Motor. 4 Articulación, Motor DYNAMIXEL MX64T, Base para Servo Motor (2), Adaptador Tipo L (2). 5 Articulación para Pinza (2), Motor DYNAMIXEL MX28T, Base para Servo Motor

23 CINEMÁTICA DEL ROBOT El segmento A-B representa al primer eslabón y cada uno de sus componentes. El segmento B-C representa al segundo eslabón y cada uno de sus componentes. El segmento C-D representa al tercer eslabón y cada uno de sus componentes. El segmento D-E representa al cuarto eslabón y cada uno de sus componentes. El punto E representa al quinto eslabón y cada uno de sus componentes.
24 CINEMÁTICA DEL ROBOT F = T d Para el segmento A-E los dos motores DYNAMIXEL MX106T ejercen una fuerza de 33.2N. Para el segmento B-E el motor DYNAMIXEL MX64T ejercen una fuerza de 20N. Para el segmento C-E el motor DYNAMIXEL MX64T ejercen una fuerza de 38.4N. Para el segmento D-E el motor DYNAMIXEL MX64T ejercen una fuerza de 96N. Segmento Fuerza(N) Masa(Kg) Rendimiento (%) A-E B-E C-E D-E

25 CINEMÁTICA DEL ROBOT q1 representa la articulación 0 y q2 la articulación 1, ambos se ubican en el mismo lugar y permiten un giro con respecto al eje X y al eje Z simultanea e individualmente. q3, q4 y q5 representan a las articulaciones 2,3 y 4, las cuales pueden desplazarse únicamente con respecto al eje X. q6 representa la articulación 5 la cual gira exclusivamente con respecto al eje Z.

26 CINEMÁTICA DEL ROBOT

27 PLANIFICACIÓN EL PRODUCTO
28 PLANIFICACIÓN EL PRODUCTO ESPECIFICACIONES Producto: Brazo Robótico CONCEPTO Propon R/D DESCRIPCIÓN e Función I R El robot debe ser óptimo para el paletizado. I R Dispondrá de un control amigable para el usuario. I R El Brazo Robótico será capaz de acoplarse a múltiples medios y ocupara el menor espacio posible. I R El Brazo Robótico podrá soportar una carca adicional de aproximadamente 1kg sin entorpecer su movilidad. Dimensiones C R Colocando el Brazo Robótico verticalmente se tiene unas dimensiones prismáticas de aproximadamente 34x600x50mm. Tipo de material C R Principalmente aluminio entre otros polímeros. Peso I R Ignorando la base el peso aproximado del robot es de 1.7kg. Inversión en el equipo I R Dado que el precio tiene múltiples variantes se estima una media de $1000.
29 CAPITULO III DISEÑO Y DESARROLLO
30 GENERALIDADES El usuario aprecia el dinamismo y estética de la estructura. El reducir el peso de cada elemento ofrece una mejora en el rendimiento para el paletizado, puesto mejoraría la movilidad.


31 MODIFICACIONES Servo Motor DYNAMIXEL MX-28T. Servo Motor DYNAMIXEL MX-64T. Servo Motor DYNAMIXEL MX-106T.






32 MODIFICACIONES

33 MODIFICACIONES
34 ESTUDIO ESTÁTICO SELECCIÓN DE MATERIAL - CES EduPack 2009 Mínimo Máximo Precio($/Kg) 1 10 Limite elástico(mpa) Densidad(gr/cc) 1 10 Plástico ABS

35 COMSOL ESTUDIO ESTÁTICO
36 ESTUDIO ESTÁTICO Nombre Material Tensión von Mises máxima (MPa) Factor de seguridad Peso (gr) Adaptador de ABS Placa Doble Adaptador de ABS Placa Simple Adaptador ABS Tipo L Articulación ABS T Articulación ABS T Articulación ABS pinza Base para ABS S.Motor Base para ABS S.Motor 28T Disco 113mm ABS Mesa Base ABS Pinzas ABS Viga 127mm ABS Viga 63.5mm ABS
37 ESTUDIO CINEMÁTICO
38 CAPITULO IV IMPLEMENTACIÓN Y PRUEBAS Construir la estructura del Brazo Robótico teniendo en cuenta las conclusiones realizadas por parte de los simuladores.
39 GENERACIÓN DE PLANOS
40 CONSTRUCCIÓN Denominación Cantidad Color Precio($) Impresora 3D Plástico ABS TG_RM_001 1 Negro 60 TG_RM_002 1 Negro TG_RM_003 3 Verde 8.50 TG_RM_004 7 Verde TG_RM_005 2 Negro 17 TG_RM_006 3 Verde 5.10 TG_RM_007 1 Negro TG_RM_008 3 Negro TG_RM_009 1 Negro TG_RM_010 2 Negro 6.80 TG_RM_011 1 Verde 4.25 TG_RM_012 2 Verde TG_RM_013 1 Negro 10 TG_RM_014 1 Negro 10 Total 239 Descuento por 59 volumen (25%) Valor Final 180

41 PRUEBAS
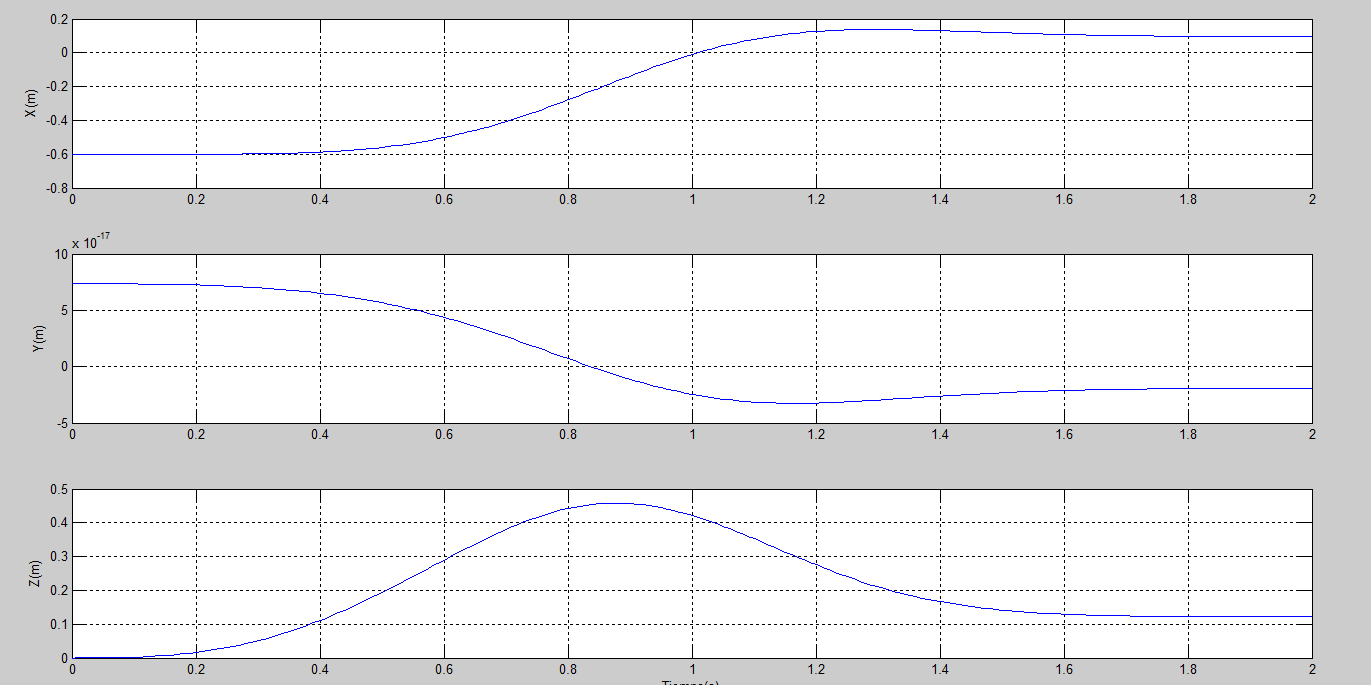
42 PRUEBAS Gráfica Eje X Eje Y Eje Z Azul Roja Mejora (%) 17% 0% 37%
43 ESPECIFICACIONES PRUEBAS Producto: Brazo Robótico CONCEPTO Cumplimiento DESCRIPCIÓN Movilidad 6 El robot debe ser óptimo para el paletizado. Fácil uso 5 Dispondrá de un control amigable para el usuario. Multifuncional 6 El Brazo Robótico será capaz de acoplarse a múltiples medios, formas y ocupara el menor espacio posible. Peso de carga 6 El Brazo Robótico podrá soportar una carca adicional de aproximadamente 1kg sin entorpecer su movilidad. Dimensiones 4 Colocando el Brazo Robótico verticalmente se tiene unas dimensiones prismáticas de aproximadamente 34x600x50mm. Tipo de material 6 Principalmente aluminio entre otros polímeros. Peso 6 Ignorando la base el peso aproximado del robot es de 1kg. Inversión en el equipo 6 Dado que el precio es de $1000.

44 PRUEBAS
45 CAPITULO V CONCLUSIONES Y RECOMENDACIONES
46 CONCLUSIONES Se recompiló información proveniente de artículos técnicos, libros, monografías, tesis o ensayos sobre el diseño de Brazos Robóticos con seis grados de libertad. Se realizó ingeniería inversa al Brazo Robótico CrustCrawler y recompilar datos estructurales útiles para la ejecución del proyecto para obtener un modelo matemático con la ayuda de CAE que cumpla con las exigencias de diseño a realizarse en la estructura del Brazo Robótico. Se diseñó e implementó un prototipo digital de la estructura del Brazo Robótico mediante el uso de CAD. Se realizó la simulación de fuerzas actuantes, momentos y del movimiento sobre la estructura del Brazo Robótico mediante el uso de CAE.
47 CONCLUSIONES Se generó una base de datos con la información para de esta forma realizar una comparación con los datos pre-configurados. Se construyó la estructura del Brazo Robótico teniendo en cuenta los resultados que aportaron los simuladores. Se logró determinar al plástico ABS como la mejor opción para manufacturar la estructura del brazo robótico por su facilidad de moldeamiento y su precio accesible en el mercado. En la optimización de masas en CAD, se obtuvo una visión de cómo se podría retirar material de las piezas permitiendo conservar las propiedades físicas del mismo y sin excluir la voz del diseñador.
48 CONCLUSIONES La simulación de la cinemática del robot, permitió validar el estudio de la física del robot y comprobó que existen mejoras de rendimiento y movilidad.
49 RECOMENDACIONES Por la precisión que requiere la manufactura del proyecto se recomienda usar exclusivamente impresoras en 3D o cortadoras laser, puesto existen espacios demasiado pequeños y medidas demasiado exactas para ser construido con métodos tradicionales. Para evitar daños en la estructura se recomienda no sobrexceder la capacidad de los motores. Debido a la fuerza de los motores del actuador se recomienda la mayor precisión al operarlo, puesto puede romper las pinzas que sujetan los objetos. Se recomienda antes de cualquier operación revisar el estado de las juntas del ensamble dado que la vibración afecta drásticamente a cualquier estructura.
50 RECOMENDACIONES Se recomienda sujetar adecuadamente la base de la estructura sobre una superficie plana y horizontal. Los planos generados para el brazo robótico permiten que sea fabricado en diferentes materiales pero para su elaboración se recomienda tomar en cuenta las propiedades mecánicas del mismo y la facilidad de manufactura en el país.
51 GRACIAS
Práctica 14 Movimiento del robot Fanuc M16i usando el método JOINT
 Práctica 14 Movimiento del robot Fanuc M16i usando el método JOINT Objetivo Conocimiento sobre el robot FANUC M16i e interactuar con él, por medio del método de movimiento JOINT. Preguntas detonantes 1)
Práctica 14 Movimiento del robot Fanuc M16i usando el método JOINT Objetivo Conocimiento sobre el robot FANUC M16i e interactuar con él, por medio del método de movimiento JOINT. Preguntas detonantes 1)
DISEÑO E IMPLEMENTACIÓN DE UN PROTOTIPO DE TORNO FRESADOR DE CONTROL NUMÉRICO COMPUTARIZADO PARA EL LABORATORIO CNC DE LA ESPE EXTENSIÓN LATACUNGA
 DISEÑO E IMPLEMENTACIÓN DE UN PROTOTIPO DE TORNO FRESADOR DE CONTROL NUMÉRICO COMPUTARIZADO PARA EL LABORATORIO CNC DE LA ESPE EXTENSIÓN LATACUNGA WALTER DAVID NÚÑEZ BALLADARES. ANDRÉS MARCELO GORDÓN GARCÉS.
DISEÑO E IMPLEMENTACIÓN DE UN PROTOTIPO DE TORNO FRESADOR DE CONTROL NUMÉRICO COMPUTARIZADO PARA EL LABORATORIO CNC DE LA ESPE EXTENSIÓN LATACUNGA WALTER DAVID NÚÑEZ BALLADARES. ANDRÉS MARCELO GORDÓN GARCÉS.
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CORTADORA POR LÁSER DE DIÓXIDO DE CARBONO CON CONTROL NUMÉRICO COMPUTARIZADO PARA
 DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CORTADORA POR LÁSER DE DIÓXIDO DE CARBONO CON CONTROL NUMÉRICO COMPUTARIZADO PARA EL LABORATORIO CNC DE LA ESPE EXTENSIÓN LATACUNGA LUGMANIA BALLADAREZ,CARLOS SANTIAGO
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CORTADORA POR LÁSER DE DIÓXIDO DE CARBONO CON CONTROL NUMÉRICO COMPUTARIZADO PARA EL LABORATORIO CNC DE LA ESPE EXTENSIÓN LATACUNGA LUGMANIA BALLADAREZ,CARLOS SANTIAGO
XX MUESTRA DE MÁQUINAS Y PROTOTIPOS MESA POSICIONADORA PARA ENSAYOS DE MOTORES ELÉCTRICOS MILTON CESAR MIRANDA ALEXANDRA PARAMO GUSTAVO GUTIERREZ
 XX MUESTRA DE MÁQUINAS Y PROTOTIPOS MESA POSICIONADORA PARA ENSAYOS DE MOTORES ELÉCTRICOS MILTON CESAR MIRANDA ALEXANDRA PARAMO GUSTAVO GUTIERREZ ANTECEDENTES Y FUNDAMENTACIÓN El proyecto surge de la necesidad
XX MUESTRA DE MÁQUINAS Y PROTOTIPOS MESA POSICIONADORA PARA ENSAYOS DE MOTORES ELÉCTRICOS MILTON CESAR MIRANDA ALEXANDRA PARAMO GUSTAVO GUTIERREZ ANTECEDENTES Y FUNDAMENTACIÓN El proyecto surge de la necesidad
Diseñar y construir un brazo de robot didáctico de seis grados de libertad para el Laboratorio de Control de Procesos tipo Puma.
 1. Introducción Un brazo robot tiene una gran variedad de aplicaciones, entre ellas se encuentran: ensamblado, soldadura, pintura, manipulación de objetos, etc. Los tipos de brazo robot que existen son
1. Introducción Un brazo robot tiene una gran variedad de aplicaciones, entre ellas se encuentran: ensamblado, soldadura, pintura, manipulación de objetos, etc. Los tipos de brazo robot que existen son
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
CINEMÁTICA INVERSA DE ROBOTS INDUSTRIALES
 I EMETRE DE 00 CINEMÁTICA INVERA DE ROBOT INDUTRIALE GERMÁN ANDRÉ RAMO FUENTE * 1. Introducción El uso de robots en ambientes industriales, y más precisamente en procesos de manufactura, ha generado toda
I EMETRE DE 00 CINEMÁTICA INVERA DE ROBOT INDUTRIALE GERMÁN ANDRÉ RAMO FUENTE * 1. Introducción El uso de robots en ambientes industriales, y más precisamente en procesos de manufactura, ha generado toda
INGENIERÍA PROFESIONAL EN INOCUIDAD ALIMENTARIA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ROBÓTICA
 INGENIERÍA PROFESIONAL EN INOCUIDAD ALIMENTARIA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ROBÓTICA UNIDADES DE APRENDIZAJE 1. Competencias Automatizar procesos de producción mediante la implementación
INGENIERÍA PROFESIONAL EN INOCUIDAD ALIMENTARIA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ROBÓTICA UNIDADES DE APRENDIZAJE 1. Competencias Automatizar procesos de producción mediante la implementación
INGENIERÍA MECÁNICA INGENIERÍA MECÁNICA
 OFERTA DE TEMAS DE TRABAJOS FIN DE ESTUDIOS Curso académico: 2015-16 Titulación: Grado en Ingeniería Mecánica Tipo de trabajo: No concertado 16016-803G Estudio mediante el MEF de una Prótesis de cadera
OFERTA DE TEMAS DE TRABAJOS FIN DE ESTUDIOS Curso académico: 2015-16 Titulación: Grado en Ingeniería Mecánica Tipo de trabajo: No concertado 16016-803G Estudio mediante el MEF de una Prótesis de cadera
DISEÑO DE SOPORTE DE UN BRAZO DE SUSPENSIÓN EN UN MONOPLAZA DE FORMULA STUDENT, FABRICADO CON TECNOLOGÍA 3D.
 DISEÑO DE SOPORTE DE UN BRAZO DE SUSPENSIÓN EN UN MONOPLAZA DE FORMULA STUDENT, FABRICADO CON TECNOLOGÍA 3D. Durante la fase de diseño del bastidor del monoplaza, se deben tener en cuenta varios aspectos
DISEÑO DE SOPORTE DE UN BRAZO DE SUSPENSIÓN EN UN MONOPLAZA DE FORMULA STUDENT, FABRICADO CON TECNOLOGÍA 3D. Durante la fase de diseño del bastidor del monoplaza, se deben tener en cuenta varios aspectos
Mecánica para Robótica
 Mecánica para Robótica Material de clase: http://www.robotica-up.org/ Education Mechanics for Robotics Conceptos básicos de mecanismos y ensambles Cuerpo rígido (o sólido indeformable): Cuerpo o materia
Mecánica para Robótica Material de clase: http://www.robotica-up.org/ Education Mechanics for Robotics Conceptos básicos de mecanismos y ensambles Cuerpo rígido (o sólido indeformable): Cuerpo o materia
DISEÑO DE UN PROCESADOR DE RESIDUOS SÓLIDOS PARA USO DOMÉSTICO
 DISEÑO DE UN PROCESADOR DE RESIDUOS SÓLIDOS PARA USO DOMÉSTICO JHON ALEXANDER SUAREZ G. ESTUDIANTE DE INGENIERÍA MECÁNICA UNIVERSIDAD TECNOLÓGICA DE PEREIRA JUNIO DE 2015 OBJETIVOS OBJETIVO GENERAL Diseñar
DISEÑO DE UN PROCESADOR DE RESIDUOS SÓLIDOS PARA USO DOMÉSTICO JHON ALEXANDER SUAREZ G. ESTUDIANTE DE INGENIERÍA MECÁNICA UNIVERSIDAD TECNOLÓGICA DE PEREIRA JUNIO DE 2015 OBJETIVOS OBJETIVO GENERAL Diseñar
Table of Contents. 1 Electrónica de potencia, Máquinas eléctricas, Tecnología de accionamientos
 Table of Contents Table of Contents 1 Electrónica de potencia, Máquinas eléctricas, Tecnología de accionamientos 2 Ajuste de reguladores de accionamientos con Matlab-Simulink 1kW 2 EPE 52-1 Servoaccionamiento
Table of Contents Table of Contents 1 Electrónica de potencia, Máquinas eléctricas, Tecnología de accionamientos 2 Ajuste de reguladores de accionamientos con Matlab-Simulink 1kW 2 EPE 52-1 Servoaccionamiento
DISPOSITIVO CENTRAR 3D TASTER EXPERT
 DISPOSITIVO CENTRAR 3D TASTER EXPERT Código Medida mm. Lectura Precio 001509 Ø Punta 4 largo 25 - Ø Eje 20 0,01 876,00 001510 Punta Recambio Ø 4 x 25 mm - 99,00 Determina el punto de origen de la pieza.
DISPOSITIVO CENTRAR 3D TASTER EXPERT Código Medida mm. Lectura Precio 001509 Ø Punta 4 largo 25 - Ø Eje 20 0,01 876,00 001510 Punta Recambio Ø 4 x 25 mm - 99,00 Determina el punto de origen de la pieza.
Diseño de un Brazo Mecánico
 Diseño de un Brazo Mecánico Proyecto: Diseño de un brazo mecánico Fecha: 8 de Noviembre de 2000 Autor: TodoRobot Bibliografía: Robótica Práctica de Angulo Introducción: Este proyecto surge del reclamo
Diseño de un Brazo Mecánico Proyecto: Diseño de un brazo mecánico Fecha: 8 de Noviembre de 2000 Autor: TodoRobot Bibliografía: Robótica Práctica de Angulo Introducción: Este proyecto surge del reclamo
TECNOLOGICO NACIONAL DE MEXICO
 TECNOLOGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ ROBOTICA CLAVE 9F1A DR. JOSE ANTONIO GARRIDO NATAREN ING. MECATRONICA EQUIPO I UNIDAD I MORFOLOGIA DEL ROBOT 1.3 TRANSMISIONES Y REDUCCIONES
TECNOLOGICO NACIONAL DE MEXICO INSTITUTO TECNOLOGICO DE VERACRUZ ROBOTICA CLAVE 9F1A DR. JOSE ANTONIO GARRIDO NATAREN ING. MECATRONICA EQUIPO I UNIDAD I MORFOLOGIA DEL ROBOT 1.3 TRANSMISIONES Y REDUCCIONES
Robótica modular y locomoción Dr. Juan González Gómez
 Robótica modular y locomoción Dr. Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Robótica Móvil: Una apuesta de futuro. Curso de Verano. UCLM. Albacete. 13-15 Julio 2009
Robótica modular y locomoción Dr. Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Robótica Móvil: Una apuesta de futuro. Curso de Verano. UCLM. Albacete. 13-15 Julio 2009
2015, Año del Generalísimo José María Morelos y Pavón
 Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
Se siguió la metodología de diseño de producto orientado al DFX con el fin de analizar si el diseño de la parte cumple con la función requerida.
 Disipación de calor en luminarios LED. Tania Rebeca Aguilar Noyola [1]. [1] Alumno del Posgrado. tania.noyola@hotmail.com Resumen. Este trabajo de investigación se centra en el diseño de un luminario haciendo
Disipación de calor en luminarios LED. Tania Rebeca Aguilar Noyola [1]. [1] Alumno del Posgrado. tania.noyola@hotmail.com Resumen. Este trabajo de investigación se centra en el diseño de un luminario haciendo
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DIDÁCTICO PARA TRANSPORTE Y DISCRIMINACIÓN DE DISCOS EN EL LABORATORIO DE HIDRÓNICA Y NEUTRÓNICA
 DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DIDÁCTICO PARA TRANSPORTE Y DISCRIMINACIÓN DE DISCOS EN EL LABORATORIO DE HIDRÓNICA Y NEUTRÓNICA PROYECTO REALIZADO POR: SUAREZ PABLO VASQUEZ SEBASTIAN DIRECTOR DEL
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DIDÁCTICO PARA TRANSPORTE Y DISCRIMINACIÓN DE DISCOS EN EL LABORATORIO DE HIDRÓNICA Y NEUTRÓNICA PROYECTO REALIZADO POR: SUAREZ PABLO VASQUEZ SEBASTIAN DIRECTOR DEL
ANÁLISIS ESTRUCTURAL DE POLEA TENSORA DM800x
 Maestranza Valle Verde EIRL Mantenimientos Especiales Antecedentes: Fabricó y Diseñó: Maestranza Valle Verde EIRL. Calculó: René Callejas Ingeniero Civil Mecánico Rut: 13.012.752-5 INFORME DE INGENIERÍA
Maestranza Valle Verde EIRL Mantenimientos Especiales Antecedentes: Fabricó y Diseñó: Maestranza Valle Verde EIRL. Calculó: René Callejas Ingeniero Civil Mecánico Rut: 13.012.752-5 INFORME DE INGENIERÍA
CARRERA: INGENIERÍA INDUSTRIAL MANUAL DE PRÁCTICAS DE LA ASIGNATURA: SISTEMAS DE MANUFACTURA FLEXIBLE ELABORADO POR: II. VÍCTOR HUGO SILVA MORALES
 INSTITUTO TECNOLÓGICO SUPERIOR DE TEPEACA Organismo Público Descentralizado del Gobierno del Estado de Puebla CARRERA: INGENIERÍA INDUSTRIAL MANUAL DE PRÁCTICAS DE LA ASIGNATURA: SISTEMAS DE MANUFACTURA
INSTITUTO TECNOLÓGICO SUPERIOR DE TEPEACA Organismo Público Descentralizado del Gobierno del Estado de Puebla CARRERA: INGENIERÍA INDUSTRIAL MANUAL DE PRÁCTICAS DE LA ASIGNATURA: SISTEMAS DE MANUFACTURA
Cinemática del Robot. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
7. Práctica. 7.1.Estudio de Levas Introducción
 7. Práctica 7.1.Estudio de Levas 7.1.1. Introducción El principal objetivo de la práctica es observar cual es el funcionamiento de las levas y cual es la función que realizan dentro de los mecanismos en
7. Práctica 7.1.Estudio de Levas 7.1.1. Introducción El principal objetivo de la práctica es observar cual es el funcionamiento de las levas y cual es la función que realizan dentro de los mecanismos en
EXPERIENCIA EN DISEÑO Y MANUFACTURA DE AEROGENERADORES DE PEQUEÑA ESCALA. Ing. Mecánico: César Fernando Pinedo Luján
 EXPERIENCIA EN DISEÑO Y MANUFACTURA DE AEROGENERADORES DE PEQUEÑA ESCALA Ing. Mecánico: César Fernando Pinedo Luján Contenidos de experiencias Diseño de Alabes. Manufactura de Alabes Diseño de Generador
EXPERIENCIA EN DISEÑO Y MANUFACTURA DE AEROGENERADORES DE PEQUEÑA ESCALA Ing. Mecánico: César Fernando Pinedo Luján Contenidos de experiencias Diseño de Alabes. Manufactura de Alabes Diseño de Generador
Ingeniería Asistida por Computador
 Problema No 1: Se desea mecanizar un eje como el que representa en la figura, el elemento debe soportar una carga de 6500N actuando sobre un tramo de la barra, el material considerado para la pieza es
Problema No 1: Se desea mecanizar un eje como el que representa en la figura, el elemento debe soportar una carga de 6500N actuando sobre un tramo de la barra, el material considerado para la pieza es
Fundamentos en Robótica. Unidad 2.2 Elementos estructurales
 Fundamentos en Robótica Unidad 2.2 Elementos estructurales Temario Chasis Sensores Articulaciones Actuadores Plataformas de cómputo Suministro de Energía Comunicaciones Actuadores medio sensores control
Fundamentos en Robótica Unidad 2.2 Elementos estructurales Temario Chasis Sensores Articulaciones Actuadores Plataformas de cómputo Suministro de Energía Comunicaciones Actuadores medio sensores control
VL/VP ALTA PRODUCTIVIDAD EN SIERRAS DE CORTE VERTICAL
 VL/VP ALTA PRODUCTIVIDAD EN SIERRAS DE CORTE VERTICAL VL VP ALTA PRODUCTIVIDAD EN CORTE VERTICAL SOLUCIONES DE CORTE VERTICAL DANOBAT diseña y fabrica soluciones de corte vertical aplicando tecnologías
VL/VP ALTA PRODUCTIVIDAD EN SIERRAS DE CORTE VERTICAL VL VP ALTA PRODUCTIVIDAD EN CORTE VERTICAL SOLUCIONES DE CORTE VERTICAL DANOBAT diseña y fabrica soluciones de corte vertical aplicando tecnologías
8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 2007
 8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 27 MODELADO Y SIMULACION DE UN CAMINADOR BIPEDO EQUILIBRADO POR CONTRAPESO Ramírez Heredia R. E. *, Naranjo Ocampo A. R.,
8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 27 MODELADO Y SIMULACION DE UN CAMINADOR BIPEDO EQUILIBRADO POR CONTRAPESO Ramírez Heredia R. E. *, Naranjo Ocampo A. R.,
Anexo I PROGRAMA FORMATIVO FABRICACION ADITIVA: 3D PRINTING
 Anexo I PROGRAMA FORMATIVO FABRICACION ADITIVA: 3D PRINTING DATOS GENERALES DE LA ESPECIALIDAD 1. Familia Profesional: Química Área Profesional: Transformación de polímeros 2. Denominación: Fabricación
Anexo I PROGRAMA FORMATIVO FABRICACION ADITIVA: 3D PRINTING DATOS GENERALES DE LA ESPECIALIDAD 1. Familia Profesional: Química Área Profesional: Transformación de polímeros 2. Denominación: Fabricación
TALLER III MAQUINAS HERRAMIENTAS DE CONTROL NUMERICO (MHCN)
") TALLER III MAQUINAS HERRAMIENTAS DE CONTROL NUMERICO (MHCN) Torno CNC Fresadora CNC Ejes de torno CNC Con herramienta atacando desde la parte delantera Se entiende como eje en las MHCN, a las direcciones
TALLER III MAQUINAS HERRAMIENTAS DE CONTROL NUMERICO (MHCN) Torno CNC Fresadora CNC Ejes de torno CNC Con herramienta atacando desde la parte delantera Se entiende como eje en las MHCN, a las direcciones
DISEÑO Y CONSTRUCCIÓN DE UN CHASIS PARA VEHÍCULO TIPO FORMULA SAE
 DISEÑO Y CONSTRUCCIÓN DE UN CHASIS PARA VEHÍCULO TIPO FORMULA SAE AUTORES: EDISON GUASCAL, LUIS QUIROZ DIRECTOR: ING. FÉLIX, MANJARRÉS CODIRECTOR: ING. OSCAR, ARTEAGA PLANTEAMIENTO DEL PROBLEMA Competencia
DISEÑO Y CONSTRUCCIÓN DE UN CHASIS PARA VEHÍCULO TIPO FORMULA SAE AUTORES: EDISON GUASCAL, LUIS QUIROZ DIRECTOR: ING. FÉLIX, MANJARRÉS CODIRECTOR: ING. OSCAR, ARTEAGA PLANTEAMIENTO DEL PROBLEMA Competencia
Banco de Proyectos 2014 propuestos para el desarrollo de Tesinas y Tesis
 Banco de Proyectos 2014 propuestos para el desarrollo de Tesinas y Tesis Programas: ESPECIALIZACIÓN EN INGENIERÍA MECATRÓNICA MAESTRÍA EN INGENIERÍA MECATRÓNICA Investigador Responsable Nombre del Proyecto
Banco de Proyectos 2014 propuestos para el desarrollo de Tesinas y Tesis Programas: ESPECIALIZACIÓN EN INGENIERÍA MECATRÓNICA MAESTRÍA EN INGENIERÍA MECATRÓNICA Investigador Responsable Nombre del Proyecto
Figura 1. Servomotores
 DISEÑO Y CONSTRUCCIÓN DE UNA MESA POSICIONADORA DE SOLDADURA EN DOS EJES PARA EL BRAZO ROBÓTICO KUKA KR5ARC DEL LABORATORIO DE ROBÓTICA INDUSTRIAL DE LA ESPE EXTENSIÓN LATACUNGA Autores: Investigador Principal:
DISEÑO Y CONSTRUCCIÓN DE UNA MESA POSICIONADORA DE SOLDADURA EN DOS EJES PARA EL BRAZO ROBÓTICO KUKA KR5ARC DEL LABORATORIO DE ROBÓTICA INDUSTRIAL DE LA ESPE EXTENSIÓN LATACUNGA Autores: Investigador Principal:
SIMULACION Y ANALISIS DE PIEZAS CON SOLIDWORKS Y CATIA V5
 Objetivos y Temario SIMULACION Y ANALISIS DE PIEZAS CON SOLIDWORKS Y CATIA V5 OBJETIVOS Con SolidWorks Simulation, podemos ensayar nuestros modelos tridimensionales de piezas y ensamblajes al mismo tiempo
Objetivos y Temario SIMULACION Y ANALISIS DE PIEZAS CON SOLIDWORKS Y CATIA V5 OBJETIVOS Con SolidWorks Simulation, podemos ensayar nuestros modelos tridimensionales de piezas y ensamblajes al mismo tiempo
Capítulo 3. Robots Escaladores. 3.1 Aplicaciones
 Capítulo 3 Robots Escaladores Este capítulo está dedicado a dar a conocer prototipos de robots escaladores realizados en algunas instituciones con diferentes tipos de aplicación y con diferentes especificaciones
Capítulo 3 Robots Escaladores Este capítulo está dedicado a dar a conocer prototipos de robots escaladores realizados en algunas instituciones con diferentes tipos de aplicación y con diferentes especificaciones
Capítulo 1: Introducción
 Capítulo 1: Introducción 1 Capítulo 1: Introducción 2 Capítulo 1: Introducción Capítulo 1: Introducción 3 1.1. Antecedentes históricos. Robots de estructura paralela. En este proyecto vamos a realizar
Capítulo 1: Introducción 1 Capítulo 1: Introducción 2 Capítulo 1: Introducción Capítulo 1: Introducción 3 1.1. Antecedentes históricos. Robots de estructura paralela. En este proyecto vamos a realizar
Control y programación de robots
 Control y programación de robots 11. Solución cinemática inversa y directa de robots seriales 11.1 El alumno, tras recibir y estudiar esta clase, debe ser capaz de: Comprender el modelado de la cinemática
Control y programación de robots 11. Solución cinemática inversa y directa de robots seriales 11.1 El alumno, tras recibir y estudiar esta clase, debe ser capaz de: Comprender el modelado de la cinemática
Contenido. Prefacio... Acerca de los autores...
 Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
Creación de prototipos
 Creación de prototipos Materiales lectivos complementarios: Product Design and Development Capítulo 12 Karl T. Ulrich y Steven D. Eppinger 2ª edición, Irwin McGraw-Hill, 2000. Product Design and Development
Creación de prototipos Materiales lectivos complementarios: Product Design and Development Capítulo 12 Karl T. Ulrich y Steven D. Eppinger 2ª edición, Irwin McGraw-Hill, 2000. Product Design and Development
Carrera: Clave de la asignatura: Participantes Representante de las academias de ingeniería Electromecánica de los Institutos Tecnológicos.
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Análisis y Síntesis de Mecanismos Ingeniería Electromecánica EMM - 0505 3 2 8 2.-
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Análisis y Síntesis de Mecanismos Ingeniería Electromecánica EMM - 0505 3 2 8 2.-
JAPÓN - MEXICO Qui Qu n i t n o t o Cu C r u so o Int n e t rna n ci c o i n o a n l E n R o R b o ó b t ó i t c i a c Apli l c i a c da
 JAPÓN - MEXICO Quinto Curso Internacional En Robótica Aplicada Centro Nacional de Actualización Docente MÓDULO I Diseño mecánico M en C Rubén Daniel Góngora Corte M en C Román Ruíz González Objetivo del
JAPÓN - MEXICO Quinto Curso Internacional En Robótica Aplicada Centro Nacional de Actualización Docente MÓDULO I Diseño mecánico M en C Rubén Daniel Góngora Corte M en C Román Ruíz González Objetivo del
PROYECTO PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO AUTOMOTRIZ MANOSALVAS FLORES JAIME ANDRÉS SOLÍS SANTAMARÍA JAVIER MILTON
 PROYECTO PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO AUTOMOTRIZ MANOSALVAS FLORES JAIME ANDRÉS SOLÍS SANTAMARÍA JAVIER MILTON Latacunga, Agosto 2013 DISEÑO Y CONSTRUCCIÓN DE UNA SEMBRADORA DE MAÍZ Y
PROYECTO PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO AUTOMOTRIZ MANOSALVAS FLORES JAIME ANDRÉS SOLÍS SANTAMARÍA JAVIER MILTON Latacunga, Agosto 2013 DISEÑO Y CONSTRUCCIÓN DE UNA SEMBRADORA DE MAÍZ Y
MECÁNICA II CURSO 2004/05
 1.1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
1.1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
EXTENSIÓN LATACUNGA DEPARTAMENTO DE CIENCIAS ECONÓMICAS ADMINISTRATIVAS Y DEL COMERCIO
 EXTENSIÓN LATACUNGA DEPARTAMENTO DE CIENCIAS ECONÓMICAS ADMINISTRATIVAS Y DEL COMERCIO "ELABORACIÓN DEL MANUAL DE ETIQUETA Y PROTOCOLO PARA ESTANDARIZAR LOS PROCESOS DE SERVICIO EN EVENTOS Y CEREMONIALES
EXTENSIÓN LATACUNGA DEPARTAMENTO DE CIENCIAS ECONÓMICAS ADMINISTRATIVAS Y DEL COMERCIO "ELABORACIÓN DEL MANUAL DE ETIQUETA Y PROTOCOLO PARA ESTANDARIZAR LOS PROCESOS DE SERVICIO EN EVENTOS Y CEREMONIALES
MOMENTO DE INERCIA 1. I OBJETIVO: Determinar el momento de inercia de un cuerpo usando un método dinámico
 1 MOMENTO DE INERCIA 1 I OBJETIVO: Determinar el momento de inercia de un cuerpo usando un método dinámico II TEORIA: Un cuerpo rígido es un sistema constituido por muchas partículas de masa m i tal que
1 MOMENTO DE INERCIA 1 I OBJETIVO: Determinar el momento de inercia de un cuerpo usando un método dinámico II TEORIA: Un cuerpo rígido es un sistema constituido por muchas partículas de masa m i tal que
Facultad de Arquitectura. Bases de estática y mecánica de materiales
 BENEMÉRITA UNIVERSIDAD AUTÓNOMA DE PUEBLA Facultad de Arquitectura Bases de estática y mecánica de materiales SISTEMA ESTRUCTURAL DE MASA ACTIVA 1. Qué son las estructuras de masa activa? 2. Qué es una
BENEMÉRITA UNIVERSIDAD AUTÓNOMA DE PUEBLA Facultad de Arquitectura Bases de estática y mecánica de materiales SISTEMA ESTRUCTURAL DE MASA ACTIVA 1. Qué son las estructuras de masa activa? 2. Qué es una
DISEÑO Y CONSTRUCCIÓN DE UN SOPORTE UNIVERSAL AUTOMATIZADO PARA LA REPARACIÓN DE MOTORES PARA LA EMPRESA TRACTO DIESEL
 DISEÑO Y CONSTRUCCIÓN DE UN SOPORTE UNIVERSAL AUTOMATIZADO PARA LA REPARACIÓN DE MOTORES PARA LA EMPRESA TRACTO DIESEL Nelson David Burbano Pozo Ing. Félix Manjarrés Ing. Héctor Terán Departamento de Ciencias
DISEÑO Y CONSTRUCCIÓN DE UN SOPORTE UNIVERSAL AUTOMATIZADO PARA LA REPARACIÓN DE MOTORES PARA LA EMPRESA TRACTO DIESEL Nelson David Burbano Pozo Ing. Félix Manjarrés Ing. Héctor Terán Departamento de Ciencias
MS 3. SISTEMA DE SEGURIDAD PARA ELECTROHUSILLOS DE MÁQUINA HERRAMIENTA
 MS 3. SISTEMA DE SEGURIDAD PARA ELECTROHUSILLOS DE MÁQUINA HERRAMIENTA PROTECCIÓN CONTRA COLISIONES Las colisiones a velocidades de avance elevadas pueden provocar daños sustanciales. Se han realizado
MS 3. SISTEMA DE SEGURIDAD PARA ELECTROHUSILLOS DE MÁQUINA HERRAMIENTA PROTECCIÓN CONTRA COLISIONES Las colisiones a velocidades de avance elevadas pueden provocar daños sustanciales. Se han realizado
SISTEMA DE PROYECTOS DE LA INGENIERÍA EN MECATRÓNICA
 SISTEMA DE PROYECTOS DE LA INGENIERÍA EN MECATRÓNICA PROYECTOS Y PRODUCTOS ACADÉMICOS TRANSVERSALES PROYECTOS DE FAMILIARIZACIÓN, PRIMEROS 2 AÑOS 1er Cuatrimestre Materia en la que se evalúa: Fundamentos
SISTEMA DE PROYECTOS DE LA INGENIERÍA EN MECATRÓNICA PROYECTOS Y PRODUCTOS ACADÉMICOS TRANSVERSALES PROYECTOS DE FAMILIARIZACIÓN, PRIMEROS 2 AÑOS 1er Cuatrimestre Materia en la que se evalúa: Fundamentos
HERRAMIENTAS ROTATIVAS. Afiladora para un mecanizado completo de herramientas de metal duro con un diámetro hasta 100 mm.
 HERRAMIENTAS ROTATIVAS Afiladora para un mecanizado completo de herramientas de metal duro con un diámetro hasta 100 mm VGrind 360 / HERRAMIENTAS ROTATIVAS // MECANIZADO DE METAL DURO LA PRECISIÓN TOMA
HERRAMIENTAS ROTATIVAS Afiladora para un mecanizado completo de herramientas de metal duro con un diámetro hasta 100 mm VGrind 360 / HERRAMIENTAS ROTATIVAS // MECANIZADO DE METAL DURO LA PRECISIÓN TOMA
Pontificia Universidad Católica del Ecuador
 1. DATOS INFORMATIVOS: PROGRAMA ANALÍTICO ASIGNATURA: ADMINISTRACIÓN PRESUPUESTARIA CÓDIGO: 16264 CARRERA: NIVEL: ADMINISTRACIÓN DE EMPRESAS SÉPTIMO No. CRÉDITOS: 4 CRÉDITOS TEORÍA: 4 CRÉDITOS PRÁCTICA:
1. DATOS INFORMATIVOS: PROGRAMA ANALÍTICO ASIGNATURA: ADMINISTRACIÓN PRESUPUESTARIA CÓDIGO: 16264 CARRERA: NIVEL: ADMINISTRACIÓN DE EMPRESAS SÉPTIMO No. CRÉDITOS: 4 CRÉDITOS TEORÍA: 4 CRÉDITOS PRÁCTICA:
ASIGNATURA DE MODELADO DE SISTEMAS DE ENERGÍAS RENOVABLES
 INGENIERÍA EN ENERGÍAS RENOVABLES EN COMPETENCIAS PROFESIONALES ASIGNATURA DE MODELADO DE SISTEMAS DE ENERGÍAS RENOVABLES UNIDADES DE APRENDIZAJE 1. Competencias Desarrollar el modelado del proyecto propuesto,
INGENIERÍA EN ENERGÍAS RENOVABLES EN COMPETENCIAS PROFESIONALES ASIGNATURA DE MODELADO DE SISTEMAS DE ENERGÍAS RENOVABLES UNIDADES DE APRENDIZAJE 1. Competencias Desarrollar el modelado del proyecto propuesto,
Análisis Estructural del Fuselaje y Bancada por MEF del UAV Tonatiuh
 Análisis Estructural del Fuselaje y Bancada por MEF del UAV Tonatiuh José F. Vázquez 1, Tiburcio Fernández 1, Jorge L. Hernández 2 (1) Sección de Posgrado e Investigación. (2) Academia de estructuras,
Análisis Estructural del Fuselaje y Bancada por MEF del UAV Tonatiuh José F. Vázquez 1, Tiburcio Fernández 1, Jorge L. Hernández 2 (1) Sección de Posgrado e Investigación. (2) Academia de estructuras,
MANIPULADORES Y BRAZOS DE REACCIÓN
 MANIPULADORES Y BRAZOS DE REACCIÓN MARCOS DE CARGA SERIE AF1 MARCOS DE CARGA SERIE AF3 Los marcos de carga ALKA USA Inc. para manipuladores estan diseñados bajo un nuevo concepto de ingeniería que nos
MANIPULADORES Y BRAZOS DE REACCIÓN MARCOS DE CARGA SERIE AF1 MARCOS DE CARGA SERIE AF3 Los marcos de carga ALKA USA Inc. para manipuladores estan diseñados bajo un nuevo concepto de ingeniería que nos
Desarrollo de un nuevo y ligero semirremolque cisterna basculante
 I Jornada sobre Investigación y Desarrollo aplicada al sector del Vehículo Industrial Desarrollo de un nuevo y ligero semirremolque cisterna basculante Tomás Hernández Departamento Técnico PARCISA S.L.U.
I Jornada sobre Investigación y Desarrollo aplicada al sector del Vehículo Industrial Desarrollo de un nuevo y ligero semirremolque cisterna basculante Tomás Hernández Departamento Técnico PARCISA S.L.U.
Micrómetro. N de práctica: 2. Nombre completo del alumno. N de cuenta: Fecha de elaboración: Grupo:
 Mediciones Mecánicas Secretaría/División:DIMEI Micrómetro N de práctica: 2 Nombre completo del alumno Firma N de cuenta: Fecha de elaboración: Grupo: Elaborado por: Revisado por: Autorizado por: Vigente
Mediciones Mecánicas Secretaría/División:DIMEI Micrómetro N de práctica: 2 Nombre completo del alumno Firma N de cuenta: Fecha de elaboración: Grupo: Elaborado por: Revisado por: Autorizado por: Vigente
Guía de montaje IMPRESORA 3D. Si lo imaginas, puedes hacerlo! LA TECNOLOGÍA 3D, AHORA A TU ALCANCE. Compatible con Windows 7 & 8 Mac OS X
 CONSTRUYE TU PROPIA IMPRESORA 3D Guía de montaje Si lo imaginas, puedes hacerlo! Compatible con Windows 7 & 8 Mac OS X LA TECNOLOGÍA 3D, AHORA A TU ALCANCE Mi impresora 3D está aquí La tecnología 3D ya
CONSTRUYE TU PROPIA IMPRESORA 3D Guía de montaje Si lo imaginas, puedes hacerlo! Compatible con Windows 7 & 8 Mac OS X LA TECNOLOGÍA 3D, AHORA A TU ALCANCE Mi impresora 3D está aquí La tecnología 3D ya
IX. Análisis dinámico de fuerzas
 Objetivos: IX. Análisis dinámico de fuerzas 1. Comprender la diferencia entre masa y peso. 2. Comprender como calcular el momento de masa de inercia de un objeto. 3. Recordar el teorema de ejes paralelos.
Objetivos: IX. Análisis dinámico de fuerzas 1. Comprender la diferencia entre masa y peso. 2. Comprender como calcular el momento de masa de inercia de un objeto. 3. Recordar el teorema de ejes paralelos.
DISEÑO DEL SISTEMA DE CONTROL BASADO EN SOFTWARE LIBRE PARA UN BRAZO ROBÓTICO DE 6 GRADOS DE LIBERTAD CON FUNCIONALIDAD DE MECANIZADO Y PALETIZADO
 DISEÑO DEL SISTEMA DE CONTROL BASADO EN SOFTWARE LIBRE PARA UN BRAZO ROBÓTICO DE 6 GRADOS DE LIBERTAD CON FUNCIONALIDAD DE MECANIZADO Y PALETIZADO EDISON VELASCO (Autor) Universidad de las Fuerzas Armadas
DISEÑO DEL SISTEMA DE CONTROL BASADO EN SOFTWARE LIBRE PARA UN BRAZO ROBÓTICO DE 6 GRADOS DE LIBERTAD CON FUNCIONALIDAD DE MECANIZADO Y PALETIZADO EDISON VELASCO (Autor) Universidad de las Fuerzas Armadas
Estudio sobre la unión de adhesivo que sujeta la compuertas superiores de los vehículos del Tren Urbano
 Estudio sobre la unión de adhesivo que sujeta la compuertas superiores de los vehículos del Tren Urbano GRUPO 3 UPR/PUPR/ATI Centro de Transferencia de Tecnología en Transportación Flavia Meléndez-Negrón
Estudio sobre la unión de adhesivo que sujeta la compuertas superiores de los vehículos del Tren Urbano GRUPO 3 UPR/PUPR/ATI Centro de Transferencia de Tecnología en Transportación Flavia Meléndez-Negrón
P 1 = 6 t P 2 = 2 t E = 2000 t/cm 2. Rdos: l = cm. P 1 = 10 t E ac = 2100 t/cm 2 E cu = 1000 t/cm 2 d= 2 cm D= 5 cm L= 10 cm.
 TP N C.2.1 Para el siguiente sistema se pide : a) Determinar el diagrama de tensiones normales. b) Calcular la variación de longitud absoluta ( l ) de la barra. P 1 = 6 t P 2 = 2 t E = 2000 t/cm 2 1 =
TP N C.2.1 Para el siguiente sistema se pide : a) Determinar el diagrama de tensiones normales. b) Calcular la variación de longitud absoluta ( l ) de la barra. P 1 = 6 t P 2 = 2 t E = 2000 t/cm 2 1 =
CONSTRUCCIÓN DE UNA GRÚA
 TECNOLOGÍA 3ºESO CONSTRUCCIÓN DE UNA GRÚA Tecnología 3º ESO Unidad Didáctica 6, Estructuras Profesor, Javier Robles Delgado COMPONENTES DEL GRUPO DE TRABAJO UD6. Estructuras Proyecto Grúa!1 TECNOLOGÍA
TECNOLOGÍA 3ºESO CONSTRUCCIÓN DE UNA GRÚA Tecnología 3º ESO Unidad Didáctica 6, Estructuras Profesor, Javier Robles Delgado COMPONENTES DEL GRUPO DE TRABAJO UD6. Estructuras Proyecto Grúa!1 TECNOLOGÍA
METODOLOGÍA PARA SELECCIONAR MATERIALES EN INGENIERÍA MECATRÓNICA METHODOLOGY TO SELECT MATERIALS IN MECHATRONICS ENGINEERING
 METODOLOGÍA PARA SELECCIONAR MATERIALES EN INGENIERÍA MECATRÓNICA METHODOLOGY TO SELECT MATERIALS IN MECHATRONICS ENGINEERING William E. Díaz Moreno 1 Nelson F. Velasco Toledo 2 1 Estudiante. Ingeniería
METODOLOGÍA PARA SELECCIONAR MATERIALES EN INGENIERÍA MECATRÓNICA METHODOLOGY TO SELECT MATERIALS IN MECHATRONICS ENGINEERING William E. Díaz Moreno 1 Nelson F. Velasco Toledo 2 1 Estudiante. Ingeniería
SIMULADOR DE MARCHA DEL TIPO PIE- PLATAFORMA USANDO MECANISMOS PARALELOS DEL TIPO HEXÁPODO
 SIMULADOR DE MARCHA DEL TIPO PIE- PLATAFORMA USANDO MECANISMOS PARALELOS DEL TIPO HEXÁPODO Grupo de Investigación en Robótica Aplicada y Biomecánica - GIRAB Dr. Dante Elías delias@pucp.pe Terapias Tradicionales
SIMULADOR DE MARCHA DEL TIPO PIE- PLATAFORMA USANDO MECANISMOS PARALELOS DEL TIPO HEXÁPODO Grupo de Investigación en Robótica Aplicada y Biomecánica - GIRAB Dr. Dante Elías delias@pucp.pe Terapias Tradicionales
laboratorio dental _Ultimate_SA_1312.indd :13:58 PM
 210 211 210-219_Ultimate_SA_1312.indd 210-211 13.12.13 3:13:58 PM Micromotor Sin Escobillas Potente y Cómodo Suavidad y Potencia sin Precedentes El líder en el mundo de micromotores de laboratorio se ha
210 211 210-219_Ultimate_SA_1312.indd 210-211 13.12.13 3:13:58 PM Micromotor Sin Escobillas Potente y Cómodo Suavidad y Potencia sin Precedentes El líder en el mundo de micromotores de laboratorio se ha
2. Un ensayo de tracción lo realizamos con una probeta de 15 mm de diámetro y longitud inicial de 150 mm. Los resultados obtenidos han sido:
 PROBLEMAS ENSAYOS 1. Un latón tiene un módulo de elasticidad de 120 GN/m 2 y un límite elástico de 250 10 6 N/m 2. Una varilla de este material de 10 mm 2 de sección y 100 cm de longitud está colgada verticalmente
PROBLEMAS ENSAYOS 1. Un latón tiene un módulo de elasticidad de 120 GN/m 2 y un límite elástico de 250 10 6 N/m 2. Una varilla de este material de 10 mm 2 de sección y 100 cm de longitud está colgada verticalmente
DISEÑO DE PROTOTIPO DE PRÓTESIS MECATRÓNICA DE MANO. Ponentes: Ana M. Juárez Mendoza Rosa Itzel Flores Luna
 DISEÑO DE PROTOTIPO DE PRÓTESIS MECATRÓNICA DE MANO Ponentes: Ana M. Juárez Mendoza Rosa Itzel Flores Luna INTRODUCCIÓN Y OBJETIVO Actualmente se desarrollan en el mundo prototipos de prótesis de mano
DISEÑO DE PROTOTIPO DE PRÓTESIS MECATRÓNICA DE MANO Ponentes: Ana M. Juárez Mendoza Rosa Itzel Flores Luna INTRODUCCIÓN Y OBJETIVO Actualmente se desarrollan en el mundo prototipos de prótesis de mano
Nombre: Curso:_3. Si la fuerza se mide en newton (N) y el vector posición en metro (m), el torque se mide en N m.
 y el vector posición en metro (m), el torque se mide en N m.") Nombre: Curso:_3 Cuando un cuerpo están sometidos a una fuerzas neta nula es posible que el cuerpo este en reposo de traslación pero no en reposo de rotación, por ejemplo es posible que existan dos o más
Nombre: Curso:_3 Cuando un cuerpo están sometidos a una fuerzas neta nula es posible que el cuerpo este en reposo de traslación pero no en reposo de rotación, por ejemplo es posible que existan dos o más
UNIVERSIDAD DE PAMPLONA FACULTAD DE INGENIERÍAS Y ARQUITECTURA PROGRAMA DE INGENIERÍA MECÁNICA
 UNIVERSIDAD DE PAMPLONA FACULTAD DE INGENIERÍAS Y ARQUITECTURA PROGRAMA DE INGENIERÍA MECÁNICA Laboratorios del Programa Contacto: dmecanica@unipamplona.edu.co Tel: 57 7 5685303 ext:163-164-154 Laboratorio
UNIVERSIDAD DE PAMPLONA FACULTAD DE INGENIERÍAS Y ARQUITECTURA PROGRAMA DE INGENIERÍA MECÁNICA Laboratorios del Programa Contacto: dmecanica@unipamplona.edu.co Tel: 57 7 5685303 ext:163-164-154 Laboratorio
Mediante herramienta de corte periférico Mediante herramienta de corte frontal
 MAQUINAS HERRAMIENTAS FRESADORAS El fresado es un procedimiento de elaboración mecánica mediante el cual una herramienta (fresa), provista de aristas cortantes dispuestas simétricamente alrededor de un
MAQUINAS HERRAMIENTAS FRESADORAS El fresado es un procedimiento de elaboración mecánica mediante el cual una herramienta (fresa), provista de aristas cortantes dispuestas simétricamente alrededor de un
DISEÑO Y CONSTRUCCIÓN DE UN SIMULADOR DE ENCENDIDO ÓPTICO PARA EL LABORATORIO DE AUTOTRÓNICA
 DISEÑO Y CONSTRUCCIÓN DE UN SIMULADOR DE ENCENDIDO ÓPTICO PARA EL LABORATORIO DE AUTOTRÓNICA OBJETIVO GENERAL Diseñar y construir un simulador de encendido óptico para el Laboratorio de Autotrónica de
DISEÑO Y CONSTRUCCIÓN DE UN SIMULADOR DE ENCENDIDO ÓPTICO PARA EL LABORATORIO DE AUTOTRÓNICA OBJETIVO GENERAL Diseñar y construir un simulador de encendido óptico para el Laboratorio de Autotrónica de
INGENIERÍA DE DISEÑO Y SIMULACIÓN POR COMPUTADORA TEORÍAS DE DISEÑO, MÉTODO DEL ELEMENTO FINITO Y PRÁCTICAS CON CATIA V5 R6 Y ANSYS 16.
 D I P L O M A D O INCORPORADO A LA UNIVERSIDAD DE GUANAJUATO SAN MIGUEL DE ALLENDE, GTO. TE INVITA A SU DIPLOMADO EN: INGENIERÍA DE DISEÑO Y SIMULACIÓN POR COMPUTADORA TEORÍAS DE DISEÑO, MÉTODO DEL ELEMENTO
D I P L O M A D O INCORPORADO A LA UNIVERSIDAD DE GUANAJUATO SAN MIGUEL DE ALLENDE, GTO. TE INVITA A SU DIPLOMADO EN: INGENIERÍA DE DISEÑO Y SIMULACIÓN POR COMPUTADORA TEORÍAS DE DISEÑO, MÉTODO DEL ELEMENTO
Diseño e implementación de un Manipulador Robótico con Tres Grados de Libertad para fines educativos
 Diseño e implementación de un Manipulador Robótico con Tres Grados de Libertad para fines educativos I. Aguirre G., L. J. Andueza C., C. Arismendi Universidad de Los Andes, Facultad de Ingeniería Escuela
Diseño e implementación de un Manipulador Robótico con Tres Grados de Libertad para fines educativos I. Aguirre G., L. J. Andueza C., C. Arismendi Universidad de Los Andes, Facultad de Ingeniería Escuela
E[M]CONOMÍA] significa: Formación en el trabajo. CONCEPT MILL 450. Formación CNC con rendimiento industrial
![E[M]CONOMÍA] significa: Formación en el trabajo. CONCEPT MILL 450. Formación CNC con rendimiento industrial](/thumbs/54/34833096.jpg "E[M]CONOMÍA] significa: Formación en el trabajo. CONCEPT MILL 450. Formación CNC con rendimiento industrial") [ E[M]CONOMÍA] significa: Formación en el trabajo. CONCEPT MILL 450 Formación CNC con rendimiento industrial Concept MILL 450 Experimente el mecanizado de una forma incomparable. La fresadora Concept MILL
[ E[M]CONOMÍA] significa: Formación en el trabajo. CONCEPT MILL 450 Formación CNC con rendimiento industrial Concept MILL 450 Experimente el mecanizado de una forma incomparable. La fresadora Concept MILL
DRILLMASTER VERTIMAQ. Tecnología CNC para todos
 DRILLMASTER VERTIMAQ Tecnología CNC para todos Concepto Vertical Todo son ventajas para tu negocio TECNOLOGIA CNC PARA TODOS La máquina vertical ocupa el menor espacio posible, es todo un record tener
DRILLMASTER VERTIMAQ Tecnología CNC para todos Concepto Vertical Todo son ventajas para tu negocio TECNOLOGIA CNC PARA TODOS La máquina vertical ocupa el menor espacio posible, es todo un record tener
UNIVERSIDAD DE LAS FUERZAS ARMADAS-ESPE EXTENSIÓN LATACUNGA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN
 UNIVERSIDAD DE LAS FUERZAS ARMADAS-ESPE EXTENSIÓN LATACUNGA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE MONITOREO DE TEMPERATURA CORPORAL Y AMBIENTAL APLICANDO
UNIVERSIDAD DE LAS FUERZAS ARMADAS-ESPE EXTENSIÓN LATACUNGA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE MONITOREO DE TEMPERATURA CORPORAL Y AMBIENTAL APLICANDO
Para realizar la descripción del Micro-Robot RV-Ml es necesario estar familia
 38 UNA HERRAMIENTA DE PROGRAMACION y COMUNICACION PARA MICRO-ROBOTS INDUSTRIALES RV-M 1 EN AMBIENTE GRAfICO Germán Andrés Ramos Fuentes * Sistema Movemaster RV-Ml. Conceptos Básicos de Robótica Para realizar
38 UNA HERRAMIENTA DE PROGRAMACION y COMUNICACION PARA MICRO-ROBOTS INDUSTRIALES RV-M 1 EN AMBIENTE GRAfICO Germán Andrés Ramos Fuentes * Sistema Movemaster RV-Ml. Conceptos Básicos de Robótica Para realizar
Práctica de cuerpo rígido
 Cátedra de Física 1 (6.01) Práctica de cuerpo rígido Objetivos... Pre - requisitos para realizar la práctica... Bibliografía recomendada en referencia la modelo teórico... Competencias que el alumno puede
Cátedra de Física 1 (6.01) Práctica de cuerpo rígido Objetivos... Pre - requisitos para realizar la práctica... Bibliografía recomendada en referencia la modelo teórico... Competencias que el alumno puede
Cinemática directa. Dan Casas
 Dan Casas 1 1. Introducción Cinemática directa Un modelo jerárquico se compone de varias mallas, relacionadas unas con otras de la misma manera que un esqueleto está compuesto de huesos, excepto que no
Dan Casas 1 1. Introducción Cinemática directa Un modelo jerárquico se compone de varias mallas, relacionadas unas con otras de la misma manera que un esqueleto está compuesto de huesos, excepto que no
PLA DISEÑO INDUSTRIAL
 PORTAFOLIO PLA DISEÑO INDUSTRIAL Somos una empresa santandereana joven e innovadora, ubicados en Bucaramanga. Creemos en el desarrollo industrial de la región y el país, por ello conformamos un equipo
PORTAFOLIO PLA DISEÑO INDUSTRIAL Somos una empresa santandereana joven e innovadora, ubicados en Bucaramanga. Creemos en el desarrollo industrial de la región y el país, por ello conformamos un equipo
INGENIERO INDUSTRIAL (CODIGO 05II)
") PRIMER CURSO (Sin docencia, sólo examen) INGENIERO INDUSTRIAL (CODIGO 05II) CÓD. ASIGNATURAS CRÉD TEÓRICAS PRÁCTICAS TIPO 1011 FÍSICA GENERAL I 6 4 2 Troncal 1º 1012 CÁLCULO I 6 3 3 Troncal 1º 1013 ÁLGEBRA
PRIMER CURSO (Sin docencia, sólo examen) INGENIERO INDUSTRIAL (CODIGO 05II) CÓD. ASIGNATURAS CRÉD TEÓRICAS PRÁCTICAS TIPO 1011 FÍSICA GENERAL I 6 4 2 Troncal 1º 1012 CÁLCULO I 6 3 3 Troncal 1º 1013 ÁLGEBRA
Pinzas angulares HGWM, tipo Micro
 Características G6: G7: G8: compensación de carrera rosca exterior brida de apriete Cuadro general Dimensiones pequeñas Con dedos abiertos o cerrados, a elegir Gran versatilidad mediante dedos externos
Características G6: G7: G8: compensación de carrera rosca exterior brida de apriete Cuadro general Dimensiones pequeñas Con dedos abiertos o cerrados, a elegir Gran versatilidad mediante dedos externos
Rodrigo Herrera, Ingeniero Civil en Obras Civiles Microgeo S.A., Area de Servicios y Proyectos
 Rodrigo Herrera, Ingeniero Civil en Obras Civiles Microgeo S.A., Area de Servicios y Proyectos Soluciones para todo el ciclo de vida de un proyecto HW de alto rendimiento Equipos de Impresión Qué es BIM?
Rodrigo Herrera, Ingeniero Civil en Obras Civiles Microgeo S.A., Area de Servicios y Proyectos Soluciones para todo el ciclo de vida de un proyecto HW de alto rendimiento Equipos de Impresión Qué es BIM?
tamaño de construcción RCM-12 RCM-16 RCM-20 RCM-25
 1 Presión de funcionamiento mín/máx 2 bar / 8 bar Temperatura ambiente mín./máx. +5 C / +60 C Temperatura del medio mín./máx. +5 C / +60 C Fluido Aire comprimido Tamaño de partículas máx. 5 µm Contenido
1 Presión de funcionamiento mín/máx 2 bar / 8 bar Temperatura ambiente mín./máx. +5 C / +60 C Temperatura del medio mín./máx. +5 C / +60 C Fluido Aire comprimido Tamaño de partículas máx. 5 µm Contenido
OBJETIVOS: CONTENIDO:
 DOCENTE FORMADOR: INTRODUCCIÓN: 1 Lic. ELÍAS RIVERA DÁVILA La Robótica Educativa es la generación de entornos de Aprendizaje basados principalmente en la iniciativa y la actividad de los estudiantes. Ellos
DOCENTE FORMADOR: INTRODUCCIÓN: 1 Lic. ELÍAS RIVERA DÁVILA La Robótica Educativa es la generación de entornos de Aprendizaje basados principalmente en la iniciativa y la actividad de los estudiantes. Ellos
PROBLEMA 1. Se pide: 1. Calcular para una confiabilidad del 95 % el valor máximo que puede tomar F para que la pieza tenga vida infinita.
 PROBLEMA 1 La pieza de la figura, que ha sido fabricada con acero forjado de resistencia última 750 MPa y densidad 7850 kg/m 3, sirve intermitentemente de soporte a un elemento de máquina, de forma que
PROBLEMA 1 La pieza de la figura, que ha sido fabricada con acero forjado de resistencia última 750 MPa y densidad 7850 kg/m 3, sirve intermitentemente de soporte a un elemento de máquina, de forma que
Diplomado Diseño y Manufactura Asistido por Computadora
 Diplomado Diseño y Manufactura Asistido por Computadora Duración 128 horas Objetivo general: Proveer al participante de las herramientas necesarias de CAD/CAM/CAE que intervienen en el proceso de diseño
Diplomado Diseño y Manufactura Asistido por Computadora Duración 128 horas Objetivo general: Proveer al participante de las herramientas necesarias de CAD/CAM/CAE que intervienen en el proceso de diseño
UNIVERSIDAD DEL BIO-BIO FACULTAD DE INGENIERIA DEPARTAMENTO DE INGENIERIA MECANICA ANEXO II SIMULADOR DE FALLAS "SPECTRAQUEST'S"
 UNIVERSIDAD DEL BIO-BIO FACULTAD DE INGENIERIA DEPARTAMENTO DE INGENIERIA MECANICA ANEXO II SIMULADOR DE FALLAS "SPECTRAQUEST'S" El simulador de fallas en maquinaria SpectraQuest es una herramienta innovadora
UNIVERSIDAD DEL BIO-BIO FACULTAD DE INGENIERIA DEPARTAMENTO DE INGENIERIA MECANICA ANEXO II SIMULADOR DE FALLAS "SPECTRAQUEST'S" El simulador de fallas en maquinaria SpectraQuest es una herramienta innovadora
Pulverizadores DP y BP Herramientas silenciosas de demolición
 Pulverizadores DP y BP Herramientas silenciosas de demolición Imprescindibles para la demolición y el reciclaje: herramientas silenciosas de demolición de Atlas Copco Gracias a máquinas y equipos prácticos,
Pulverizadores DP y BP Herramientas silenciosas de demolición Imprescindibles para la demolición y el reciclaje: herramientas silenciosas de demolición de Atlas Copco Gracias a máquinas y equipos prácticos,
CONCEPTOS BASICOS EN EL ESTUDIO DE MECANISMOS. Máquinas y mecanismos.
 CONCEPTOS BASICOS EN EL ESTUDIO DE MECANISMOS Máquinas y mecanismos. Reulaux define máquina como una "combinación de cuerpos resistentes de manera que, por medio de ellos, las fuerzas mecánicas de la naturaleza
CONCEPTOS BASICOS EN EL ESTUDIO DE MECANISMOS Máquinas y mecanismos. Reulaux define máquina como una "combinación de cuerpos resistentes de manera que, por medio de ellos, las fuerzas mecánicas de la naturaleza
Luego entonces la importancia del Modelo Cinemático Inverso del mecanismo del codo; Ya que nos permite determinar la posición de los actuadores cuando
 RESUMEN Propuesta para el control del movimiento de una prótesis transhumeral de tres grados de libertad, con actuadores en paralelo G. Díaz, L. Leija, R. Muñoz, Ja. Álvarez, Z. Escudero Centro de Investigación
RESUMEN Propuesta para el control del movimiento de una prótesis transhumeral de tres grados de libertad, con actuadores en paralelo G. Díaz, L. Leija, R. Muñoz, Ja. Álvarez, Z. Escudero Centro de Investigación
T P Nº 4: SOLICITACIONES (M, Q y N)- CENTROIDES- CENTROS DE GRAVEDAD- MOMENTOS ESTATICOS Y MOMENTOS DE INERCIA-
- CENTROIDES- CENTROS DE GRAVEDAD- MOMENTOS ESTATICOS Y MOMENTOS DE INERCIA-") T P Nº 4: SOLICITACIONES (M, Q y N)- CENTROIDES- CENTROS DE GRAVEDAD- MOMENTOS ESTATICOS Y MOMENTOS DE INERCIA- 1. Dadas las siguientes vigas, A) clasificarlas según su sustentación en : empotradas, simplemente
T P Nº 4: SOLICITACIONES (M, Q y N)- CENTROIDES- CENTROS DE GRAVEDAD- MOMENTOS ESTATICOS Y MOMENTOS DE INERCIA- 1. Dadas las siguientes vigas, A) clasificarlas según su sustentación en : empotradas, simplemente
UNIVERSIDAD CENTROCCIDENTAL LISANDRO ALVARADO DECANATO DE CIENCIAS Y TECNOLOGÍA DIRECCIÓN DE PROGRAMA INGENIERIA DE PRODUCCIÓN
 UNIVERSIDAD CENTROCCIDENTAL LISANDRO ALVARADO DECANATO DE CIENCIAS Y TECNOLOGÍA DIRECCIÓN DE PROGRAMA INGENIERIA DE PRODUCCIÓN PROGRAMA DE LA ASIGNATURA PROGRAMA: Ingeniería de Producción DEPARTAMENTO:
UNIVERSIDAD CENTROCCIDENTAL LISANDRO ALVARADO DECANATO DE CIENCIAS Y TECNOLOGÍA DIRECCIÓN DE PROGRAMA INGENIERIA DE PRODUCCIÓN PROGRAMA DE LA ASIGNATURA PROGRAMA: Ingeniería de Producción DEPARTAMENTO:
FICHA GENERAL DE MÓDULO: ECLIPSES
 FICHA GENERAL DE MÓDULO: ECLIPSES Nombre del Módulo Tipo de Módulo Eclipses Análogo Especificaciones Generales Público Objetivo Tiempo de interacción Capacidad portante Autónomo o Asistido Accesibilidad
FICHA GENERAL DE MÓDULO: ECLIPSES Nombre del Módulo Tipo de Módulo Eclipses Análogo Especificaciones Generales Público Objetivo Tiempo de interacción Capacidad portante Autónomo o Asistido Accesibilidad
FICHA PÚBLICA DEL PROYECTO
 NUMERO DE PROYECTO: 218824 EMPRESA BENEFICIADA: MICROCALLI DEL GOLFO S.A DE C.V TÍTULO DEL PROYECTO: LÍNEA DE PRODUCTOS DE SOFTWARE PARA DOMÓTICA OBJETIVO DEL PROYECTO: Incorporar el paradigma de LPS como
NUMERO DE PROYECTO: 218824 EMPRESA BENEFICIADA: MICROCALLI DEL GOLFO S.A DE C.V TÍTULO DEL PROYECTO: LÍNEA DE PRODUCTOS DE SOFTWARE PARA DOMÓTICA OBJETIVO DEL PROYECTO: Incorporar el paradigma de LPS como
1. Palanca 2. Poleas: Polea simple o fija Polea móvil Polipastos
 1. Palanca 2. Poleas: Polea simple o fija Polea móvil Polipastos Una palanca es una máquina constituida por una barra simple que puede girar en torno a un punto de apoyo o fulcro. Según donde se aplique
1. Palanca 2. Poleas: Polea simple o fija Polea móvil Polipastos Una palanca es una máquina constituida por una barra simple que puede girar en torno a un punto de apoyo o fulcro. Según donde se aplique
Trabajo Práctico 4 - Movimiento relativo del punto
 Facultad de Ingeniería - U.N.L.P. Mecánica Racional - Curso 2016 / 2 semestre Trabajo Práctico 4 - Movimiento relativo del punto Problema 1. Un excéntrico circular de radio R gira con velocidad angular
Facultad de Ingeniería - U.N.L.P. Mecánica Racional - Curso 2016 / 2 semestre Trabajo Práctico 4 - Movimiento relativo del punto Problema 1. Un excéntrico circular de radio R gira con velocidad angular
LABORATORIO DENTAL LABORATORIO DENTAL
 258 259 Micromotor Sin Escobillas Potente y Cómodo Suavidad y Potencia sin Precedentes El líder en el mundo de micromotores de laboratorio se ha superado una vez más. La gama Ultimate ha evolucionado para
258 259 Micromotor Sin Escobillas Potente y Cómodo Suavidad y Potencia sin Precedentes El líder en el mundo de micromotores de laboratorio se ha superado una vez más. La gama Ultimate ha evolucionado para