DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y LA MECÁNICA CARRERA DE INGENIERÍA EN MECATRÓNICA
|
|
|
- José Francisco Felipe Redondo Lara
- hace 5 años
- Vistas:
Transcripción



1 DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y LA MECÁNICA CARRERA DE INGENIERÍA EN MECATRÓNICA DISEÑO E IMPLEMENTACIÓN DE UN PROTOTIPO DE PRÓTESIS DE RODILLA CON CONTROL DE TORQUE ACTIVO MEDIANTE LA INVESTIGACIÓN DE LAS PROPIEDADES MECÁNICAS DE MATERIALES MAGNETOREOLÓGICOS BAJO LA ACCIÓN DE DIFERENTES CAMPOS MAGNETICOS DIEGO OMAR CAMACHO FRANCO ALVARO PATRICIO VELASCO VASCO TUTOR: ING. OSCAR ARTEAGA







2 INTRODUCCIÓN Amputaciones externas Naturales Accidente Fluidos Magnetoreológic os (FMR) Propiedades Implementación Prótesis con Limitador de Torque Estabilidad Regulador de torque Control mediante campo magnético Emulación de la marcha Humana
")
")





3 ANTECEDENTES (5,6%) Discapacidad Física (23%) Recuperación Comodidad Prótesis (rígidas) Jacob Rabinov 1940 Partículas micrométricas magnetizables Fluidos Magnetoreológicos Fluido newtoniano Viscosidad Resistencia al flujo Campo Magnético

4 JUSTIFICACIÓN Amputación Extremidades Inferiores Sustitución de la extremidad perdida Evitar Discriminación Promover Correcta Caminata Mecanismo de Rotación Confort Estabilidad Costo Beneficio


5 PROPUESTA Investigación Fluidos Magnetoreológicos Implementación Prótesis de Rodilla
6 OBJETIVO GENERAL Investigar las propiedades mecánicas de materiales Magnetoreológicos bajo la acción de diferentes campos magnéticos para el diseño e implementación de un prototipo de prótesis de rodilla con un control activo de torque activo. OBJETIVOS ESPECÍFICOS Construir un prototipo de prótesis de rodilla con control de torque para emular la oscilación de la articulación amputada. Implementar fluidos Magnetoreológicos en el prototipo construido, afín de generar un control de torque activo durante la caminata y reemplazar la función del músculo perdido. Proponer un esquema de control que permita maniobrar el actuador del prototipo de prótesis para replicar la marcha humana. Realizar evaluaciones experimentales del prototipo de prótesis desarrollada para comprobar la incidencia del esquema de control en el control activo del torque




7 TRABAJOS PREVIOS Prótesis de rodilla policéntrica Ossur Canadá Prótesis de rodilla con pistón magnetoreológico México Prótesis de rodilla Rheo Knee 3 Estados Unidos Rodilla Adaptive Endolite Estados Unidos





8 DISEÑO Y SELECCIÓN DE COMPONENTES Materiales Protésicos Biocompatibles Resistentes Aluminio C330R Buena Resistencia Tratable Térmicamente Apto para el mecanizado Resistencia a la corrosión

9 PARAMETROS DE DISEÑO Medidas antropométricas Altura = cm. Masa= Kg. Peso: 686 [N] Peso de la prótesis Modelo Dempster y Clauser 3,57 Kg.



10 TORQUE MÁXIMO Torque flexión y extensión 7,1 [Nm] Torque máximo caminata


11 PROPIEDADES FLUIDO MAGNETOREOLÓGICO MRF 140 CG Ensayos Reológicos Anton Para Physica MRC-50I MRD 70/IT
12 RESULTADOS Viscosidad Umbral de Cizalladura 4.5 x ºC 30 ºC 40 ºC 50 ºC Umbral de cizalladura (Pa) Campo magnético (mt) Viscosidad= 21,51 [Pa.s] 800 [mt] 41,7 [Kpa]


13 PROPIEDADES DE LOS FLUIDOS Viscosidad intrínseca Viscosidad Fracción volumétrica de las partículas Par de torsión Temperatura Campo Magnético Umbral de Cizalladura


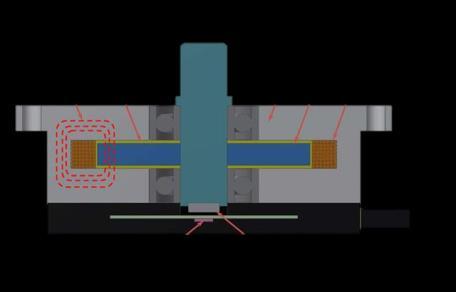
14 DISEÑO MECÁNICO Tipos de Limitadores Disco r2= radio del disco r1= radio del eje del limitador rt= radio exterior de limitador a= ancho del limitador
15 TENSIÓN DE CORTE DEL LIMITADOR Fluidos Magnetoreológicos Fluido de Bingham τ r 2, ω, H = τ y H + η ωr h T = T MR + T η T = 4π 3 τ y H r 2 3 r ηωπ h r 2 4 r 1 4 τ r2, ω, H es la fuerza de cizallamiento τ y H es el límite de cedencia dinámico η es la viscosidad del fluido ω es la velocidad angular del disco rotatorio h (gap) es el intervalo en donde se encuentra el fluido Saturación 800 [mt] 121 KA/m r 2 es la posición en la superficie del disco. T= 7,2 [Nm] Torque requerido 7,14 [Nm]


16 Efecto GAP Efecto r2 sobre el torque
17 DISEÑO MAGNÉTICO Según el fabricante Circuito magnético analogía eléctrica NI = (R MR + R acero )Φ B = 2.645H H H [mt] 121 KA/m
18 DISEÑO MAGNÉTICO H MR = Φ μ MR A MR = NI g MR + l acero ( μ MR μ acero )( A MR A acero ൰ N El número de vueltas del cable I Corriente = 0.8 [A] g MR (gap) intervalo donde se encuentra el fluido= 1[mm] l acero longitud magnética del acero = [m] μ MR coeficiente de permeabilidad magnética del fluido MR = 5.26 μ acero coeficiente de permeabilidad magnética del acero = 100 (Olmo, 2012) A MR Área del fluido = [m] A acero Área del acero = [m] H MR Intensidad de campo magnético del fluido = A/m N = vueltas 0,8 A 24 (AWG)

19 SELECCIÓN DEL LIMITADOR Dispositivos del Mercado Condiciones geométricas y mecánicas TDF Steering Unit LORD 5 Nm 7 Nm Flexión y extensión Sistema de transmisión

20 DISEÑO DEL EJE Masa 70 kg. Factor de seguridad= 1,2 Masa 84 Kg. Teoría de deformación = 7,491[mm] = 12,7 [mm] Criterio de Goodman Factor de Seguridad n= 1,13

![Motor DC Servomotor Torque 3,9 [Nm]](/docs-images/85/92183647/images/21-7.jpg "Precio 150 Torque 4 [Nm] Precio 60")
21 SELECCIÓN SERVOMOTOR Marcha Humana Movimiento Continuo Actuador Pasivo Motor DC Servomotor Torque 3,9 [Nm] Precio 150 Torque 4 [Nm] Precio 60


22 DISEÑO SISTEMA DE TRANSMISIÓN Marcha 10 a 25 [Nm] Relación de Transmisión 6,25: 1 Torque máximo 26 [Nm] + 5 [Nm] 31 [Nm]



23 Deformación 0,00214 [mm] Factor de seguridad 3,27 Giro 90 Bloqueo de movimiento


24 DISEÑO CORTANTE PERNOS DE LA MANZANA F perno 266,64 N Rodamiento SKF 6001 F soporta 1170 N C 3,9 KN C soporta 5,1 N


![0,006472 [mm]](/docs-images/85/92183647/images/25-5.jpg "Factor de")
25 DISEÑO SOPORTE DEL LIMITADOR Aluminio C330 Deformación 0, [mm] Factor de seguridad 9,9

26 DISEÑO ELECTRÓNICO Marcha Humana Matlab Variación angular en grados de la articulación de la prótesis de la rodilla. RP-respuesta al peso, AY-apoyo intermedio, AF-apoyo final, PB-pre balanceo, BI-balanceo inicial, BIT- balance intermedio, BF-balanceo final θ t = cos 3.057t sen 3.057t cos 6.114t 21.35sen 6.114t

27 DISEÑO ELECTRÓNICO Proporcional Rapidez Integral Estabilización




28 CONSTRUCCIÓN E IMPLEMENTACIÓN Sistema de transmisión Buje Tapa del Limitador


29 CONSTRUCCIÓN E IMPLEMENTACIÓN Soporte del servomotor Manzana


30 CONSTRUCCIÓN E IMPLEMENTACIÓN Soporte del Limitador Estructura





31 CONSTRUCCIÓN E IMPLEMENTACIÓN

32 SISTEMA DE CONTROL Sensor Arduino Sabertooth Limitador Servomotor Mapeo y Acondicionamiento 420 a a 90 Comunicación Serial

33 SISTEMA DE CONTROL Condiciones de Seguridad Control PI
34 SISTEMA DE CONTROL Activación del Limitador
35 SISTEMA DE CONTROL Activación del Limitador Implementación circuito eléctrico

36 ENSAMBLAJE FINAL





37 ANÁLISIS DE RESULTADOS Limitador de Torque SIN Datos CARGA Obtenidos SISTEMA DE RODILLERAS Datos Fabricante




38 IMPLEMENTACIÓN Estructura de la prótesis Limitador de torque y servomotor Sistema de transmisión Prótesis completa (pruebas)




39 RESPUESTA PROTESIS A LA MARCHA Interfaz Arduino Matlab



40 RESPUESTA PROTESIS A LA MARCHA Marcha Humana Prótesis Marcha Humana Normal




41 PRUEBAS CON CARGA Flexión Carga Aplicada Soporte Peso de la persona
42 CONCLUSIONES Mediante la investigación de las propiedades mecánicas de materiales Magnetoreológicos bajo la acción de diferentes campos magnéticos se lleva a cabo el diseño e implementación de un prototipo de prótesis de rodilla con un control activo de torque activo. Con la implementación de los fluidos Magnetoreológicos en el prototipo construido, se logra generar un control de torque activo durante la caminata y reemplazar la función del músculo perdido. El esquema de control se permite controlar el actuador del prototipo de prótesis para replicar la marcha humana y mediante evaluaciones experimentales del prototipo de prótesis desarrollada se verifica la incidencia del esquema de control en el control activo del torque
43 CONCLUSIONES Para el correcto diseño del limitador de torque se consideran tres parámetros importantes: el número de vueltas, el límite de saturación magnética y el gap o cavidad en donde se encuentra el fluido MR, deben considerarse simultáneamente para el diseño del limitador. Los dispositivos de fluido MR, gracias a sus numerosas ventajas (compacidad, altas fuerzas o pares, bajo consumo de energía, suavidad y seguridad de funcionamiento), pueden utilizarse en una amplia variedad de campos que van desde automoción a la rehabilitación. El reciente interés creciente del mercado por los fluidos magnetoreológicos deriva principalmente de la capacidad de emplear interfaces rápidas y sencillas entre una señal de control eléctrico y una respuesta mecánica.
44 CONCLUSIONES Estos materiales tienen el potencial de cambiar radicalmente el diseño de las máquinas en las que su implementación es posible. Sin embargo, este escenario sólo es posible si los dispositivos que explotan estas características son capaces de garantizar el accionamiento mediante un movimiento preciso y rápido. Esta consideración es aún más relevante cuando se tiene en cuenta su costo. Como los dispositivos magneto-reológicos son controlables electrónicamente, es posible usar algoritmos de control de realimentación para mejorar su funcionalidad; sin embargo, este tipo de control requiere conocimiento de la respuesta del dispositivo mucho más allá de la disponible en la hoja de datos proporcionada por el fabricante.



45 RECOMENDACIONES Comunicación Inalámbrica Limitador de toque mas compacto Medidas ajustables
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y LA MECÁNICA CARRERA DE INGENIERÍA EN MECATRÓNICA
 DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y LA MECÁNICA CARRERA DE INGENIERÍA EN MECATRÓNICA DISEÑO E IMPLEMENTACIÓN DE UN PROTOTIPO DE PRÓTESIS TRANSTIBIAL CON AMORTIGUAMIENTO ACTIVO MEDIANTE LA INVESTIGACIÓN
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y LA MECÁNICA CARRERA DE INGENIERÍA EN MECATRÓNICA DISEÑO E IMPLEMENTACIÓN DE UN PROTOTIPO DE PRÓTESIS TRANSTIBIAL CON AMORTIGUAMIENTO ACTIVO MEDIANTE LA INVESTIGACIÓN
AUTORAS: JOHANNA IZA GABRIELA TACO TUTOR: ING. OSCAR ARTEAGA
 INVESTIGACIÓN DE LA MANIOBRABILIDAD DE UNA PLATAFORMA ROBÓTICA CON SISTEMA DE TRACCIÓN OMNIDIRECCIONAL E IMPLEMENTACIÓN EN EL PROYECTO DE INVESTIGACIÓN TELE OPERACIÓN BILATERAL CORPORATIVO DE MÚLTIPLES
INVESTIGACIÓN DE LA MANIOBRABILIDAD DE UNA PLATAFORMA ROBÓTICA CON SISTEMA DE TRACCIÓN OMNIDIRECCIONAL E IMPLEMENTACIÓN EN EL PROYECTO DE INVESTIGACIÓN TELE OPERACIÓN BILATERAL CORPORATIVO DE MÚLTIPLES
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA
 DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ TRABAJO DE TITULACIÓN DISEÑO Y CONSTRUCCIÓN DE ACCESORIOS PARA LA CALIBRACIÓN DE BOMBAS ROTATIVAS TIPO VE PARA EL BANCO
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ TRABAJO DE TITULACIÓN DISEÑO Y CONSTRUCCIÓN DE ACCESORIOS PARA LA CALIBRACIÓN DE BOMBAS ROTATIVAS TIPO VE PARA EL BANCO
AUTOR: BLADIMIR VARGAS DIRECTOR: ING. GUIDO TORRES CODIRECTOR: ING. LEONIDAS QUIROZ LATACUNGA
 DEPARTAMENTO DE ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE MOTOR DE AIRE COMPRIMIDO MDI PARA LA IMPLEMENTACIÓN EN UNA MOTOCICLETA AUTOR: BLADIMIR VARGAS
DEPARTAMENTO DE ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE MOTOR DE AIRE COMPRIMIDO MDI PARA LA IMPLEMENTACIÓN EN UNA MOTOCICLETA AUTOR: BLADIMIR VARGAS
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA
 i DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA MECATRÓNICA TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO MECATRÓNICO TEMA: DISEÑO E IMPLEMENTACIÓN DE UN
i DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA MECATRÓNICA TRABAJO DE TITULACIÓN, PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO MECATRÓNICO TEMA: DISEÑO E IMPLEMENTACIÓN DE UN
REPOTENCIACIÓN Y MODERNIZACIÓN DE UN MONTACARGAS ELÉCTRICO DE PASILLO ANGOSTO CON EXTENSOR MARCA CATERPILLAR PARA LA EMPRESA FAVAG
 REPOTENCIACIÓN Y MODERNIZACIÓN DE UN MONTACARGAS ELÉCTRICO DE PASILLO ANGOSTO CON EXTENSOR MARCA CATERPILLAR PARA LA EMPRESA FAVAG David Aguirre Xavier molina Índice 1 2 3 4 5 6 Introducción Características
REPOTENCIACIÓN Y MODERNIZACIÓN DE UN MONTACARGAS ELÉCTRICO DE PASILLO ANGOSTO CON EXTENSOR MARCA CATERPILLAR PARA LA EMPRESA FAVAG David Aguirre Xavier molina Índice 1 2 3 4 5 6 Introducción Características
PROYECTO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTROMECÁNICA AUTORA: DIANA CAROLINA BERMEO M.
 PROYECTO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTROMECÁNICA AUTORA: DIANA CAROLINA BERMEO M. TEMA: DISEÑO Y CONSTRUCCIÓN DE UN MOLINO DE MARTILLOS TRITURADOR DE GRANOS PARA
PROYECTO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTROMECÁNICA AUTORA: DIANA CAROLINA BERMEO M. TEMA: DISEÑO Y CONSTRUCCIÓN DE UN MOLINO DE MARTILLOS TRITURADOR DE GRANOS PARA
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ
 DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ AUTORES: ANDRÉS FERNANDO ERAZO CRIOLLO EDWIN PAUL LISINTUÑA TOAPANTA TEMA: DISEÑO, CONSTRUCCIÓN E IMPLEMENTACIÓN DE UN
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ AUTORES: ANDRÉS FERNANDO ERAZO CRIOLLO EDWIN PAUL LISINTUÑA TOAPANTA TEMA: DISEÑO, CONSTRUCCIÓN E IMPLEMENTACIÓN DE UN
Anexo 1.1. Nomenclatura. A1.1 Nomenclatura
 ANEXOS 241 242 Anexo 1.1 Nomenclatura A1.1 Nomenclatura En este apartado se detallan los símbolos utilizados en esta tesis. Se ha seguido el criterio tradicional para abreviar las derivadas respecto del
ANEXOS 241 242 Anexo 1.1 Nomenclatura A1.1 Nomenclatura En este apartado se detallan los símbolos utilizados en esta tesis. Se ha seguido el criterio tradicional para abreviar las derivadas respecto del
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA EN MECATRÓNICA
 DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA EN MECATRÓNICA INVESTIGACIÓN DE MECANISMOS MULTIPLICADORES DE FUERZA PARA EL DISEÑO Y CONSTRUCCIÓN DE UN EXOESQUELETO ROBÓTICO DE
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA EN MECATRÓNICA INVESTIGACIÓN DE MECANISMOS MULTIPLICADORES DE FUERZA PARA EL DISEÑO Y CONSTRUCCIÓN DE UN EXOESQUELETO ROBÓTICO DE
Teoría. 1) Deducir a partir de la figura la expresión del caudal lateral Q s que se consigue alimentando a presión un cojinete hidrodinámico.
 Deducir a partir de la figura la expresión del caudal lateral Q s que se consigue alimentando a presión un cojinete hidrodinámico.") ASIGNATURA GAIA ELEMENTOS DE MÁQUINAS - TECNOLOGÍA DE MÁQUINAS I Septiembre 2004 CURSO KURTSOA 4º Teoría NOMBRE IZENA FECHA DATA 02/09/2004 1) Deducir a partir de la figura la expresión del caudal lateral
ASIGNATURA GAIA ELEMENTOS DE MÁQUINAS - TECNOLOGÍA DE MÁQUINAS I Septiembre 2004 CURSO KURTSOA 4º Teoría NOMBRE IZENA FECHA DATA 02/09/2004 1) Deducir a partir de la figura la expresión del caudal lateral
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA MECÁNICA
 DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA MECÁNICA TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO MECÁNICO TEMA: ANÁLISIS DE LA PÉRDIDA DE MASA Y EL CALOR
DEPARTAMENTO DE CIENCIAS DE LA ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA MECÁNICA TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO MECÁNICO TEMA: ANÁLISIS DE LA PÉRDIDA DE MASA Y EL CALOR
SOLO PARA INFORMACION
 INTRODUCCIÓN Al igual que la deformación lineal, la torsión también es una caso de elasticidad, que en el siguiente laboratorio se estudiara unos de los casos de elasticidad, la Torsión. Se mostrara y
INTRODUCCIÓN Al igual que la deformación lineal, la torsión también es una caso de elasticidad, que en el siguiente laboratorio se estudiara unos de los casos de elasticidad, la Torsión. Se mostrara y
RHEOSCAM. RHEOSCAM MODULAR LABORATORIO Módulos Mono husillo y Doble husillo. Mezclador interno.
 RHEOSCAM RHEOSCAM MODULAR LABORATORIO Módulos Mono husillo y Doble husillo. Mezclador interno. Rheoscam está especialmente diseñado para procesos de investigación y laboratorio. Desde 0,1 kg/h hasta 2
RHEOSCAM RHEOSCAM MODULAR LABORATORIO Módulos Mono husillo y Doble husillo. Mezclador interno. Rheoscam está especialmente diseñado para procesos de investigación y laboratorio. Desde 0,1 kg/h hasta 2
2.004 MODELISMO, DINÁMICA Y CONTROL II Primavera 2003
 2.004 MODELISMO, DINÁMICA Y CONTROL II Primavera 2003 Boletín de problemas 8 Problema 1. Tres masas iguales m se deslizan sin fricción por una varilla rígida horizontal. Sujetos a las masas hay seis muelles
2.004 MODELISMO, DINÁMICA Y CONTROL II Primavera 2003 Boletín de problemas 8 Problema 1. Tres masas iguales m se deslizan sin fricción por una varilla rígida horizontal. Sujetos a las masas hay seis muelles
ESPECIFICACIONES MATERIALES UTILIZADOS
 Contenido Capítulo 1 INTRODUCCIÓN... 17 1.1 Introducción general... 17 1.2 Hipótesis de trabajo... 18 1.3 Objetivos... 18 1.3.1 Objetivo general... 18 1.3.2 Objetivos específicos... 18 1.4 Área de estudio
Contenido Capítulo 1 INTRODUCCIÓN... 17 1.1 Introducción general... 17 1.2 Hipótesis de trabajo... 18 1.3 Objetivos... 18 1.3.1 Objetivo general... 18 1.3.2 Objetivos específicos... 18 1.4 Área de estudio
TEORÍA DE MECANISMOS 2.- RESISTENCIAS PASIVAS
 TEORÍA DE MECANISMOS 2.- RESISTENCIAS PASIVAS Departamento de Ingeniería Mecánica 1 Trabajo motriz, resistente y útil Flujo energético de una máquina Trabajo motriz (entrada) MAQUINA GENÉRICA (rendimiento)
TEORÍA DE MECANISMOS 2.- RESISTENCIAS PASIVAS Departamento de Ingeniería Mecánica 1 Trabajo motriz, resistente y útil Flujo energético de una máquina Trabajo motriz (entrada) MAQUINA GENÉRICA (rendimiento)
Amortiguadores magnetoreológicos
 Amortiguadores magnetoreológicos Miguel Cupich Rodríguez* Fernando J. Elizondo Garza* Resumen Se describen las propiedades de los fluidos magnetoreológicos y su uso en amortiguadores para el control de
Amortiguadores magnetoreológicos Miguel Cupich Rodríguez* Fernando J. Elizondo Garza* Resumen Se describen las propiedades de los fluidos magnetoreológicos y su uso en amortiguadores para el control de
PRUEBA DE ACCESO A LA UNIVERSIDAD PARA MAYORES DE 25 AÑOS PRUEBA ESPECÍFICA
 PRUEBA DE ACCESO A LA UNIVERSIDAD PARA MAYORES DE 5 AÑOS FÍSICA 1.- Cuál es el período de un péndulo simple de 1 m de longitud? a) 4 s b) 8 s c) s d) 6 s.- Un cuerpo de 15 kg se deja caer por un plano
PRUEBA DE ACCESO A LA UNIVERSIDAD PARA MAYORES DE 5 AÑOS FÍSICA 1.- Cuál es el período de un péndulo simple de 1 m de longitud? a) 4 s b) 8 s c) s d) 6 s.- Un cuerpo de 15 kg se deja caer por un plano
CARRERA : Ing. MECÁNICA GUIA DE PROBLEMAS Nº6
 ASIGNATURA : CARRERA : Ing. MECÁNICA GUIA DE PROBLEMAS Nº6 FACULTAD DE INGENIERÍA 2018 1 CURSO 2018 GUIA DE PROBLEMAS Nº6 PROBLEMA Nº1 En el instante t un sistema de partículas tiene las siguientes velocidades
ASIGNATURA : CARRERA : Ing. MECÁNICA GUIA DE PROBLEMAS Nº6 FACULTAD DE INGENIERÍA 2018 1 CURSO 2018 GUIA DE PROBLEMAS Nº6 PROBLEMA Nº1 En el instante t un sistema de partículas tiene las siguientes velocidades
Elementos que Influyen en el Dimensionamiento: Inercia, Carga, Par y Velocidad. Herramientas y Aplicación Ejemplo
 Elementos que Influyen en el Dimensionamiento: Inercia, Carga, Par y Velocidad. Herramientas y Aplicación Ejemplo Panasonic Electric Works España Motion Control Agenda Definición de inercia y ejemplos
Elementos que Influyen en el Dimensionamiento: Inercia, Carga, Par y Velocidad. Herramientas y Aplicación Ejemplo Panasonic Electric Works España Motion Control Agenda Definición de inercia y ejemplos
CARRERA DE INGENIERÍA EN MECATRÓNICA
 CARRERA DE INGENIERÍA EN MECATRÓNICA TEMA: DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA MECÁNICO PARA UN ROBOT MANIPULADOR MÓVIL EN EL PROYECTO DE INVESTIGACIÓN TELE OPERACIÓN BILATERAL CORPORATIVO DE MÚLTIPLES
CARRERA DE INGENIERÍA EN MECATRÓNICA TEMA: DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA MECÁNICO PARA UN ROBOT MANIPULADOR MÓVIL EN EL PROYECTO DE INVESTIGACIÓN TELE OPERACIÓN BILATERAL CORPORATIVO DE MÚLTIPLES
Proyecto de curso. Control de Sistemas Eléctricos II
 Proyecto de curso Control de Sistemas Eléctricos - 27126 2017-II Escuela de Ingenierías Eléctrica, Electrónica y de Telecomunicaciones Universidad Industrial de Santander Bucaramanga, agosto de 2017 1.
Proyecto de curso Control de Sistemas Eléctricos - 27126 2017-II Escuela de Ingenierías Eléctrica, Electrónica y de Telecomunicaciones Universidad Industrial de Santander Bucaramanga, agosto de 2017 1.
DISEÑO MECÁNICO (Ingeniería Industrial, 4º curso)
") DISEÑO MECÁNICO (Ingeniería Industrial, 4º curso) EXAMEN: 31 de ENERO de 2009 Nombre y Apellidos:.. Una lavadora de uso doméstico, de carga frontal, presenta sólo un programa de lavado. El proceso completo
DISEÑO MECÁNICO (Ingeniería Industrial, 4º curso) EXAMEN: 31 de ENERO de 2009 Nombre y Apellidos:.. Una lavadora de uso doméstico, de carga frontal, presenta sólo un programa de lavado. El proceso completo
OBJETIVO DEL ACTUADOR. Regular el movimiento de un cuerpo que se debe trasladar controladamente de una posición a otra.
 OBJETIVO DEL ACTUADOR Regular el movimiento de un cuerpo que se debe trasladar controladamente de una posición a otra. El control del movimiento puede ser, según la aplicación: I.- Control de posición.
OBJETIVO DEL ACTUADOR Regular el movimiento de un cuerpo que se debe trasladar controladamente de una posición a otra. El control del movimiento puede ser, según la aplicación: I.- Control de posición.
NOMBRE IZENA FECHA DATA 04//09/2003
 ASIGNATURA GAIA ELEMENTOS DE MÁQUINAS I - TECNOLOGÍA DE MÁQUINAS I Septiembre 2003 CURSO KURTSOA 4º Teoría NOMBRE IZENA FECHA DATA 04//09/2003 1. Se realizan una serie de ensayos sobre un cojinete para
ASIGNATURA GAIA ELEMENTOS DE MÁQUINAS I - TECNOLOGÍA DE MÁQUINAS I Septiembre 2003 CURSO KURTSOA 4º Teoría NOMBRE IZENA FECHA DATA 04//09/2003 1. Se realizan una serie de ensayos sobre un cojinete para
Sistemas de unidades
 Sistemas de unidades Ejercicios propuestos 1. Realice las siguientes conversiones de unidades: a) Una cantidad X es igual a Y/Z. Las unidades de Y son m 3 s 7 y las de Z son m s 10. Qué unidades tiene
Sistemas de unidades Ejercicios propuestos 1. Realice las siguientes conversiones de unidades: a) Una cantidad X es igual a Y/Z. Las unidades de Y son m 3 s 7 y las de Z son m s 10. Qué unidades tiene
Paola Maribel Llamuca Torres Raquel Estefania Fernández Martínez
 DISEÑO Y CONSTRUCCIÓN DE MATERIAL TIFLOTÉCNICO QUE FACILITE LA IMPRESIÓN DE INFORMACIÓN EN SISTEMA BRAILLE A NIÑOS DE LA UNIDAD EDUCATIVA ESPECIALIZADA DE NO VIDENTES DE COTOPAXI Paola Maribel Llamuca
DISEÑO Y CONSTRUCCIÓN DE MATERIAL TIFLOTÉCNICO QUE FACILITE LA IMPRESIÓN DE INFORMACIÓN EN SISTEMA BRAILLE A NIÑOS DE LA UNIDAD EDUCATIVA ESPECIALIZADA DE NO VIDENTES DE COTOPAXI Paola Maribel Llamuca
Convocatoria de Junio. Parcial II. 16 de junio de apartado anterior, representar gráficamente VH indicando claramente su desfase
 Electricidad y Electrometría 1º Electrónicos Convocatoria de Junio. Parcial II. 16 de junio de 2.003 Parte Primera. 1.- Tres espiras circulares iguales, de radio R, están recorridas por corrientes iguales
Electricidad y Electrometría 1º Electrónicos Convocatoria de Junio. Parcial II. 16 de junio de 2.003 Parte Primera. 1.- Tres espiras circulares iguales, de radio R, están recorridas por corrientes iguales
LABORATORIO DE SISTEMAS DE CONTROL AUTOMÁTICO PRÁCTICA N 3
 ESCUELA POLITÉCNICA NACIONAL Campus Politécnico "J. Rubén Orellana R." FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control LABORATORIO DE SISTEMAS DE CONTROL AUTOMÁTICO
ESCUELA POLITÉCNICA NACIONAL Campus Politécnico "J. Rubén Orellana R." FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control LABORATORIO DE SISTEMAS DE CONTROL AUTOMÁTICO
LISTA DE SÍMBOLOS. Bajada, movimiento que realiza el palpador al acercarse al centro de rotación de la
 LISTA DE SÍMBOLOS a bu ( ) B Bi n af u b i Ancho de la huella de contacto Curva de Bézier no paramétrica Bajada, movimiento que realiza el palpador al acercarse al centro de rotación de la Polinomio de
LISTA DE SÍMBOLOS a bu ( ) B Bi n af u b i Ancho de la huella de contacto Curva de Bézier no paramétrica Bajada, movimiento que realiza el palpador al acercarse al centro de rotación de la Polinomio de
Diseño e implementación de una plataforma robótica móvil inalámbrica con tracción intercambiable para el laboratorio de Mecatrónica de la ESPE-L
 Diseño e implementación de una plataforma robótica móvil inalámbrica con tracción intercambiable para el laboratorio de Mecatrónica de la ESPE-L Por Paúl Tinizaray Características del terreno Conocer las
Diseño e implementación de una plataforma robótica móvil inalámbrica con tracción intercambiable para el laboratorio de Mecatrónica de la ESPE-L Por Paúl Tinizaray Características del terreno Conocer las
FÍSICA GENERAL III - CURSO 2015 Práctica 7: Flujo magnético. Ley de Faraday. Autoinducción. Inducción mutua.
 FÍSICA GENERAL III - CURSO 2015 Práctica 7: Flujo magnético. Ley de Faraday. Autoinducción. Inducción mutua. 1- Considere un circuito rígido por el que circula una corriente I. Naturalmente, en su entorno
FÍSICA GENERAL III - CURSO 2015 Práctica 7: Flujo magnético. Ley de Faraday. Autoinducción. Inducción mutua. 1- Considere un circuito rígido por el que circula una corriente I. Naturalmente, en su entorno
Ingeniería Mecatrónica. Latacunga, 2015 CASA MARCELO NETO DANILO
 «DISEÑO Y CONSTRUCCIÓN DE UNA SALVAESCALERAS PARA PERSONAS CON DISCAPACIDAD MOTRIZ EN MIEMBROS INFERIORES PARA EL EDIFICIO DE LA UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE EXTENSION LATACUNGA CAMPUS GRAL.
«DISEÑO Y CONSTRUCCIÓN DE UNA SALVAESCALERAS PARA PERSONAS CON DISCAPACIDAD MOTRIZ EN MIEMBROS INFERIORES PARA EL EDIFICIO DE LA UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE EXTENSION LATACUNGA CAMPUS GRAL.
Trabajo Práctico 7 - Dinámica de sistemas Edición 2014
 Facultad de Ingeniería - U.N.L.P. Mecánica Racional - Curso 2016 / 1 semestre Trabajo Práctico 7 - Dinámica de sistemas Edición 2014 Parte A: Magnitudes dinámicas Q, K O, T Problema 1. El péndulo doble
Facultad de Ingeniería - U.N.L.P. Mecánica Racional - Curso 2016 / 1 semestre Trabajo Práctico 7 - Dinámica de sistemas Edición 2014 Parte A: Magnitudes dinámicas Q, K O, T Problema 1. El péndulo doble
ANÁLISIS DEL EFECTO DEL SECTOR NEUTRO DE LA LEVA, SOBRE LA EFICIENCIA VOLUMÉTRICA DE UNA MÁQUINA DE DESPLAZAMIENTO POSITIVO CON FLUJO NO PULSADO
 INGENIERÍA MECÁNICA ANÁLISIS DEL EFECTO DEL SECTOR NEUTRO DE LA LEVA, SOBRE LA EFICIENCIA VOLUMÉTRICA DE UNA MÁQUINA DE DESPLAZAMIENTO POSITIVO CON FLUJO NO PULSADO Grupo de Investigación: DISEÑO AVANZADO
INGENIERÍA MECÁNICA ANÁLISIS DEL EFECTO DEL SECTOR NEUTRO DE LA LEVA, SOBRE LA EFICIENCIA VOLUMÉTRICA DE UNA MÁQUINA DE DESPLAZAMIENTO POSITIVO CON FLUJO NO PULSADO Grupo de Investigación: DISEÑO AVANZADO
Guion de prácticas: El sistema de dos motores eléctricos acoplados
 Guion de prácticas: El sistema de dos motores eléctricos acoplados 1. OBJETIVOS DE LA PRÁCTICA Los objetivos de esta práctica son los siguientes: Control independiente de la velocidad y la tensión de la
Guion de prácticas: El sistema de dos motores eléctricos acoplados 1. OBJETIVOS DE LA PRÁCTICA Los objetivos de esta práctica son los siguientes: Control independiente de la velocidad y la tensión de la
DEPARTAMENTO DE ENERGÍA Y MECÁNICA
 DEPARTAMENTO DE ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ DISEÑO, CONSTRUCCIÓN E IMPLEMENTACIÓN DE UN ASIENTO DE POTENCIA CON 3 GRADOS DE LIBERTAD PARA LA ASOCIACIÓN DE DISCAPACITADOS MERCEDES
DEPARTAMENTO DE ENERGÍA Y MECÁNICA CARRERA DE INGENIERÍA AUTOMOTRIZ DISEÑO, CONSTRUCCIÓN E IMPLEMENTACIÓN DE UN ASIENTO DE POTENCIA CON 3 GRADOS DE LIBERTAD PARA LA ASOCIACIÓN DE DISCAPACITADOS MERCEDES
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL FACULTAD DE CIENCIAS NATURALES Y MATEMÁTICAS DEPARTAMENTO DE FÍSICA
 ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL FACULTAD DE CIENCIAS NATURALES Y MATEMÁTICAS DEPARTAMENTO DE FÍSICA SEGUNDA EVALUACIÓN DE FÍSICA A FEBRERO 18 DE 2015 SOLUCIÓN Analice las siguientes preguntas
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL FACULTAD DE CIENCIAS NATURALES Y MATEMÁTICAS DEPARTAMENTO DE FÍSICA SEGUNDA EVALUACIÓN DE FÍSICA A FEBRERO 18 DE 2015 SOLUCIÓN Analice las siguientes preguntas
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES
 INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CONTROL DE MOTORES ELÉCTRICOS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno controlará motores eléctricos mediante
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CONTROL DE MOTORES ELÉCTRICOS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno controlará motores eléctricos mediante
REOLOGIA DE FLUIDOS ALIMENTARIOS
 E-mail: williamsscm@hotmail.com REOLOGIA DE FLUIDOS ALIMENTARIOS REOLOGÍA La reología es la ciencia que estudia el flujo y las deformaciones de sólidos y fluidos, bajo la influencia de fuerzas mecánicas
E-mail: williamsscm@hotmail.com REOLOGIA DE FLUIDOS ALIMENTARIOS REOLOGÍA La reología es la ciencia que estudia el flujo y las deformaciones de sólidos y fluidos, bajo la influencia de fuerzas mecánicas
UNIVERSIDAD NACIONAL DEL CALLAO
 UNIVERSIDAD NACIONAL DEL CALLAO FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA ESCUELA PROFESIONAL DE INGENIERÍA ELÉCTRICA Curso: TEORÍA DE CAMPOS ELECTROMAGNÉTICOS PROFESOR: ING. JORGE MONTAÑO PISFIL
UNIVERSIDAD NACIONAL DEL CALLAO FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA ESCUELA PROFESIONAL DE INGENIERÍA ELÉCTRICA Curso: TEORÍA DE CAMPOS ELECTROMAGNÉTICOS PROFESOR: ING. JORGE MONTAÑO PISFIL
REDISEÑO Y OPTIMIZACIÓN DE UNA PLATAFORMA DE 800 lbs. TIPO TIJERA PARA TRABAJO AÉREO - MANLIFT, EN EL CENTRO DE MANTENIMIENTO AÉREO ( CEMA )
") REDISEÑO Y OPTIMIZACIÓN DE UNA PLATAFORMA DE 800 lbs. TIPO TIJERA PARA TRABAJO AÉREO - MANLIFT, EN EL CENTRO DE MANTENIMIENTO AÉREO ( CEMA ) Juan Pablo Brazalez Reinoso Nelson Iván Panchi Collaguazo Mayo
REDISEÑO Y OPTIMIZACIÓN DE UNA PLATAFORMA DE 800 lbs. TIPO TIJERA PARA TRABAJO AÉREO - MANLIFT, EN EL CENTRO DE MANTENIMIENTO AÉREO ( CEMA ) Juan Pablo Brazalez Reinoso Nelson Iván Panchi Collaguazo Mayo
01/07/2009. Ecuaciones dinámicas del motor. Fig. 1 circuito equivalente del motor de CD con excitación independiente.
 Control de Máquinas Eléctricas Primavera 2009 1. Análisis vectorial de sistema trifásicos 1. Campo magnético 2. Devanado trifásico 3. Vector espacial de un sistema de corrientes 4. Representación gráfica
Control de Máquinas Eléctricas Primavera 2009 1. Análisis vectorial de sistema trifásicos 1. Campo magnético 2. Devanado trifásico 3. Vector espacial de un sistema de corrientes 4. Representación gráfica
AUTORES: NURY ORTIZ SEBASTIÁN JÁCOME DIRECTOR: ING. ALEXANDER IBARRA
 DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE SILENCIADOR DE SONIDO VARIABLE PARA SISTEMAS DE ESCAPE DE MOTORES DE COMBUSTIÓN INTERNA DE CUATRO TIEMPOS DE 200cc AUTORES: NURY ORTIZ SEBASTIÁN JÁCOME DIRECTOR:
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE SILENCIADOR DE SONIDO VARIABLE PARA SISTEMAS DE ESCAPE DE MOTORES DE COMBUSTIÓN INTERNA DE CUATRO TIEMPOS DE 200cc AUTORES: NURY ORTIZ SEBASTIÁN JÁCOME DIRECTOR:
Índice de Contenidos
 Índice de Contenidos CAPÍTULO 1 INTRODUCCIÓN... 14 1.1 Lugar de aplicación... 15 1.2 El problema (o la oportunidad)... 15 1.3 Área de investigación... 15 1.4 Área de aplicación... 16 1.5 Objetivos... 16
Índice de Contenidos CAPÍTULO 1 INTRODUCCIÓN... 14 1.1 Lugar de aplicación... 15 1.2 El problema (o la oportunidad)... 15 1.3 Área de investigación... 15 1.4 Área de aplicación... 16 1.5 Objetivos... 16
Ing. JAVIER HUMBERTO OLIVEROS DONOHUE Consultora OCI
 DESCRIPCION FENOMENOLOGICA DEL FUNCIONAMIENTO DEL GENERADOR EOLICO IEC 61400-2 CLASE IVB DE 10,000 VATIOS PARA VELOCIDAD PROMEDIO ANNUAL DE VIENTO DE 6.0 METROS POR SEGUNDO CON MAQUINA ELECTRICA DE IMANES
DESCRIPCION FENOMENOLOGICA DEL FUNCIONAMIENTO DEL GENERADOR EOLICO IEC 61400-2 CLASE IVB DE 10,000 VATIOS PARA VELOCIDAD PROMEDIO ANNUAL DE VIENTO DE 6.0 METROS POR SEGUNDO CON MAQUINA ELECTRICA DE IMANES
Resistencia de Materiales 1A. Profesor Herbert Yépez Castillo
 Resistencia de Materiales 1A Profesor Herbert Yépez Castillo 2015-1 2 Capítulo 5. Torsión 5.4 Ángulo 3 Un par es un momento que tiende a hacer girar respecto a su eje longitudinal. Su efecto es de interés
Resistencia de Materiales 1A Profesor Herbert Yépez Castillo 2015-1 2 Capítulo 5. Torsión 5.4 Ángulo 3 Un par es un momento que tiende a hacer girar respecto a su eje longitudinal. Su efecto es de interés
Resistencia de Materiales 1A. Profesor Herbert Yépez Castillo
 Resistencia de Materiales 1A Profesor Herbert Yépez Castillo 2014-2 2 Capítulo 5. Torsión 5.4 Ángulo 3 Un par es un momento que tiende a hacer girar respecto a su eje longitudinal. Su efecto es de interés
Resistencia de Materiales 1A Profesor Herbert Yépez Castillo 2014-2 2 Capítulo 5. Torsión 5.4 Ángulo 3 Un par es un momento que tiende a hacer girar respecto a su eje longitudinal. Su efecto es de interés
DETERMINACION DE LAS CURVAS DE FLUJO MEDIANTE EL VISCOSIMETRO DE TUBO CAPILAR
 1 DETERMINACION DE LAS CURVAS DE FLUJO MEDIANTE EL VISCOSIMETRO DE TUBO CAPILAR Preparado por; Ing. Esteban L. Ibarrola Cátedra de Mecánica de los Fluidos- FCEFyN - UNC 1. Fluidos newtonianos La distribución
1 DETERMINACION DE LAS CURVAS DE FLUJO MEDIANTE EL VISCOSIMETRO DE TUBO CAPILAR Preparado por; Ing. Esteban L. Ibarrola Cátedra de Mecánica de los Fluidos- FCEFyN - UNC 1. Fluidos newtonianos La distribución
PROBLEMA 1. Se pide: 1. Calcular para una confiabilidad del 95 % el valor máximo que puede tomar F para que la pieza tenga vida infinita.
 PROBLEMA 1 La pieza de la figura, que ha sido fabricada con acero forjado de resistencia última 750 MPa y densidad 7850 kg/m 3, sirve intermitentemente de soporte a un elemento de máquina, de forma que
PROBLEMA 1 La pieza de la figura, que ha sido fabricada con acero forjado de resistencia última 750 MPa y densidad 7850 kg/m 3, sirve intermitentemente de soporte a un elemento de máquina, de forma que
Tema 4: Sistema de control de un aerogenerador de velocidad variable
 Tema 4: Sistema de control de un aerogenerador de velocidad variable Asignatura: Sistemas electrónicos para fuentes de energía renovables Grupo de Tecnología Electrónica Departamento de Ingeniería Electrónica
Tema 4: Sistema de control de un aerogenerador de velocidad variable Asignatura: Sistemas electrónicos para fuentes de energía renovables Grupo de Tecnología Electrónica Departamento de Ingeniería Electrónica
Módulo 1: Mecánica Sólido rígido. Rotación (II)
") Módulo 1: Mecánica Sólido rígido. Rotación (II) 1 Segunda ley de Newton en la rotación Se puede hacer girar un disco por ejemplo aplicando un par de fuerzas. Pero es necesario tener en cuenta el punto
Módulo 1: Mecánica Sólido rígido. Rotación (II) 1 Segunda ley de Newton en la rotación Se puede hacer girar un disco por ejemplo aplicando un par de fuerzas. Pero es necesario tener en cuenta el punto
8.5 SISTEMA PARA EL ÁNGULO DE INCLINACIÓN
 8.5 SISTEMA PARA EL ÁNGULO DE INCLINACIÓN 8.5.1.Servomotor para giro de inclinación. Para el ángulo de inclinación se ha utilizado otro servomotor de la serie de Panasonic Minas junto con un reductor de
8.5 SISTEMA PARA EL ÁNGULO DE INCLINACIÓN 8.5.1.Servomotor para giro de inclinación. Para el ángulo de inclinación se ha utilizado otro servomotor de la serie de Panasonic Minas junto con un reductor de
UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA
 UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA NOMBRE... APELLIDOS... CALLE... POBLACIÓN... PROVINCIA... C. P.... SISTEMAS MECÁNICOS E.T.S. de Ingenieros Industriales PRUEBA DE EVALUACIÓN A DISTANCIA /
UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA NOMBRE... APELLIDOS... CALLE... POBLACIÓN... PROVINCIA... C. P.... SISTEMAS MECÁNICOS E.T.S. de Ingenieros Industriales PRUEBA DE EVALUACIÓN A DISTANCIA /
TEMA 3.- CINEMÁTICA Y DINÁMICA DEL MOTOR
 TEMA.- CINEMÁTICA Y DINÁMICA DEL MOTOR 5 ..- Calcular la oblicuidad de la biela en grados, el deslizamiento, la aceleración, la velocidad instantánea y media del pistón para una posición angular de la
TEMA.- CINEMÁTICA Y DINÁMICA DEL MOTOR 5 ..- Calcular la oblicuidad de la biela en grados, el deslizamiento, la aceleración, la velocidad instantánea y media del pistón para una posición angular de la
8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 2007
 8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 2007 DISEÑO Y CONTRUCCIÓN DE UNA PRÓTESIS DE RODILLA CON PISTÓN MAGNETOREOLOGICO Juan Ricardo Enriquez-Torres, Elizabeth
8º CONGRESO IBEROAMERICANO DE INGENIERIA MECANICA Cusco, 23 al 25 de Octubre de 2007 DISEÑO Y CONTRUCCIÓN DE UNA PRÓTESIS DE RODILLA CON PISTÓN MAGNETOREOLOGICO Juan Ricardo Enriquez-Torres, Elizabeth
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBAS DE ACCESO A ESTUDIOS UNIVERSITARIOS (LOGSE) Curso
 Curso") UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID INSTRUCCIONES GENERALES Y VALORACIÓN Se presentan a continuación dos pruebas: OPCIÓN A y OPCIÓN B, cada una de ellas con un ejercicio y varias cuestiones.
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID INSTRUCCIONES GENERALES Y VALORACIÓN Se presentan a continuación dos pruebas: OPCIÓN A y OPCIÓN B, cada una de ellas con un ejercicio y varias cuestiones.
DISEÑO Y CONSTRUCCIÓN DE UNA MÁQUINA AUTOMÁTICA PARA EL PROCESO DE SERIGRAFIADO EN CERÁMICA ESMALTADA PARA LA EMPRESA EDESA S.A
 DISEÑO Y CONSTRUCCIÓN DE UNA MÁQUINA AUTOMÁTICA PARA EL PROCESO DE SERIGRAFIADO EN CERÁMICA ESMALTADA PARA LA EMPRESA EDESA S.A ANCHALUISA SILVA, CHRISTIAN GUILLERMO Objetivo General: Diseñar y construir
DISEÑO Y CONSTRUCCIÓN DE UNA MÁQUINA AUTOMÁTICA PARA EL PROCESO DE SERIGRAFIADO EN CERÁMICA ESMALTADA PARA LA EMPRESA EDESA S.A ANCHALUISA SILVA, CHRISTIAN GUILLERMO Objetivo General: Diseñar y construir
Precisión sin precedentes y facilidad de operación.
 RM80 MOTONIVELADORA Precisión sin precedentes y facilidad de operación. El marco de acero forjado está diseñado para una mayor durabilidad en aplicaciones de trabajo pesado. La estructura del marco utiliza
RM80 MOTONIVELADORA Precisión sin precedentes y facilidad de operación. El marco de acero forjado está diseñado para una mayor durabilidad en aplicaciones de trabajo pesado. La estructura del marco utiliza
Fundamentos de los Motores Eléctricos
 1 B = Φ A 2 Fuerza sobre un conductor eléctrico. Fuerza proporcional a: Densidad de flujo magnético. Corriente eléctrica que circula por el conductor. Seno del ángulo que forman los campos B e I. Fuerza
1 B = Φ A 2 Fuerza sobre un conductor eléctrico. Fuerza proporcional a: Densidad de flujo magnético. Corriente eléctrica que circula por el conductor. Seno del ángulo que forman los campos B e I. Fuerza
Cálculos de diseño. Vacío Carga. Reacción de inducido. Tema III Diseño de máquinas de corriente continua
 Flujo medio en el entrehierro Carga lineal Número de polos Diámetro y Longitud del inducido Longitud del entrehierro Devanado inducido Número de ranuras inducido Colecto y escobillas Dimensiones polo y
Flujo medio en el entrehierro Carga lineal Número de polos Diámetro y Longitud del inducido Longitud del entrehierro Devanado inducido Número de ranuras inducido Colecto y escobillas Dimensiones polo y
Sistemas y Máquinas Fluido Mecánicas
 Sistemas y Máquinas Fluido Mecánicas Bloque III. Tema 6.1. Neumá1ca Industrial: Introducción a la Neumá1ca Industrial Carlos J. Renedo Inmaculada Fernández Diego Juan Carcedo Haya Félix Or1z Fernández
Sistemas y Máquinas Fluido Mecánicas Bloque III. Tema 6.1. Neumá1ca Industrial: Introducción a la Neumá1ca Industrial Carlos J. Renedo Inmaculada Fernández Diego Juan Carcedo Haya Félix Or1z Fernández
DISEÑO Y CONSTRUCCIÓN DE UN SOPORTE AUTOMATIZADO PARA LA REPARACIÓN DE MOTORES PARA LA EMPRESA TRACTO DIESEL
 DISEÑO Y CONSTRUCCIÓN DE UN SOPORTE AUTOMATIZADO PARA LA REPARACIÓN DE MOTORES PARA LA EMPRESA TRACTO DIESEL AUTOR: NELSON DAVID BURBANO POZO DIRECTOR: ING. FÉLIX MANJARRÉS CODIRECTOR: ING. HÉCTOR TERÁN
DISEÑO Y CONSTRUCCIÓN DE UN SOPORTE AUTOMATIZADO PARA LA REPARACIÓN DE MOTORES PARA LA EMPRESA TRACTO DIESEL AUTOR: NELSON DAVID BURBANO POZO DIRECTOR: ING. FÉLIX MANJARRÉS CODIRECTOR: ING. HÉCTOR TERÁN
UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA
 UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA NOMBRE.............................................. APELLIDOS........................................... CALLE................................................
UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA NOMBRE.............................................. APELLIDOS........................................... CALLE................................................
- Rápido y silencioso. - Caja de acero. - Carcaza de aluminio inyectado. - Electrónica auto programable. - Máxima calidad. - Tecnología de avanzada.
 - Rápido y silencioso. - Caja de acero. - Carcaza de aluminio inyectado. - Electrónica auto programable. - Máxima calidad. - Tecnología de avanzada. - Diseño innovador. - Para portones corredizos. - Motorreductor
- Rápido y silencioso. - Caja de acero. - Carcaza de aluminio inyectado. - Electrónica auto programable. - Máxima calidad. - Tecnología de avanzada. - Diseño innovador. - Para portones corredizos. - Motorreductor
Ejemplos de los capítulos II, III, y IV
 1. Un resorte helicoidal de compresión se fabricó con alambre de acero estirado duro con 0.080 pulgadas de diámetro y un diámetro exterior de 0.880 pulgadas. Los extremos son sencillos y esmerilados, y
1. Un resorte helicoidal de compresión se fabricó con alambre de acero estirado duro con 0.080 pulgadas de diámetro y un diámetro exterior de 0.880 pulgadas. Los extremos son sencillos y esmerilados, y
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE INNOVACIÓN PARA LA EXCELENCIA
 UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE INNOVACIÓN PARA LA EXCELENCIA Departamento de Ciencias de la Energía y Mecánica Carrera de Ingeniería Automotriz PROYECTO DE INVESTIGACIÓN IMPLEMENTACIÓN Y PUESTA
UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE INNOVACIÓN PARA LA EXCELENCIA Departamento de Ciencias de la Energía y Mecánica Carrera de Ingeniería Automotriz PROYECTO DE INVESTIGACIÓN IMPLEMENTACIÓN Y PUESTA
INGENIERÍA AUTOMOTRIZ DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE DIRECCIÓN PARA UN VEHÍCULO TRIMOTO
 INGENIERÍA AUTOMOTRIZ DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE DIRECCIÓN PARA UN VEHÍCULO TRIMOTO AUTOR: CARLOS SUNTAXI DIRECTOR: ING. GUIDO TORRES CODIRECTOR: ING. FÉLIX MANJARRÉS. SISTEMA DE DIRECCIÓN
INGENIERÍA AUTOMOTRIZ DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE DIRECCIÓN PARA UN VEHÍCULO TRIMOTO AUTOR: CARLOS SUNTAXI DIRECTOR: ING. GUIDO TORRES CODIRECTOR: ING. FÉLIX MANJARRÉS. SISTEMA DE DIRECCIÓN
PRÁCTICA DE LABORATORIO II-05 PÉNDULO DE TORSIÓN
 PRÁCTICA DE LABORATORIO II-05 PÉNDULO DE TORSIÓN OBJETIVOS Determinar la constante de torsión de un péndulo. Estudiar la dependencia del período de oscilación con el momento de inercia. Determinar experimentalmente
PRÁCTICA DE LABORATORIO II-05 PÉNDULO DE TORSIÓN OBJETIVOS Determinar la constante de torsión de un péndulo. Estudiar la dependencia del período de oscilación con el momento de inercia. Determinar experimentalmente
Dinamica de rotacion. Torque. Momentum Angular. Aplicaciones.
 Dinamica de rotacion. Torque. Momentum Angular. Aplicaciones. Movimiento de rotación. Cuerpos rígidos un cuerpo con una forma definida, que no cambia en forma que las partículas que lo componen permanecen
Dinamica de rotacion. Torque. Momentum Angular. Aplicaciones. Movimiento de rotación. Cuerpos rígidos un cuerpo con una forma definida, que no cambia en forma que las partículas que lo componen permanecen
EXAMEN DE FÍSICA E22A_1516 OPCIÓN A
 EXAMEN DE FÍSICA E22A_1516 OPCIÓN A 29.02.2016 ORIENTACIONES: Comente sus planteamientos de tal modo que demuestre que entiende lo que hace. Tenga en cuenta que la extensión de sus respuestas está limitada
EXAMEN DE FÍSICA E22A_1516 OPCIÓN A 29.02.2016 ORIENTACIONES: Comente sus planteamientos de tal modo que demuestre que entiende lo que hace. Tenga en cuenta que la extensión de sus respuestas está limitada
Hidráulica de potencia. Motores
 Hidráulica de potencia Motores Aplicaciones de la Hidráulica de potencia Se divide en dos grandes áreas. a-. Hidráulica de potencia (oleodinámica) móvil b-. Hidráulica de potencia (oleodinámica) estacionaria
Hidráulica de potencia Motores Aplicaciones de la Hidráulica de potencia Se divide en dos grandes áreas. a-. Hidráulica de potencia (oleodinámica) móvil b-. Hidráulica de potencia (oleodinámica) estacionaria
Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre...
 Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre... La figura muestra un manipulador paralelo horizontal plano, que consta de una plataforma en forma de triángulo equilátero de lado l, cuya masa m se halla
Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre... La figura muestra un manipulador paralelo horizontal plano, que consta de una plataforma en forma de triángulo equilátero de lado l, cuya masa m se halla
1. MOTOR DE CORRIENTE CONTINUA Y DINAMO
 1. MOTO DE COIENTE CONTINUA Y DINAMO 1.1. OBJETIVO El propósito de esta práctica es estudiar el comportamiento de un motor DC pequeño cuando opera directamente y en reversa como generador o dinamo. En
1. MOTO DE COIENTE CONTINUA Y DINAMO 1.1. OBJETIVO El propósito de esta práctica es estudiar el comportamiento de un motor DC pequeño cuando opera directamente y en reversa como generador o dinamo. En
Sistema Integrador Ciencia y tecnología ACTUADORES
 Sistema Integrador Ciencia y tecnología ACTUADORES ACTUADORES Se denominan actuadores a aquellos elementos que pueden provocar un efecto sobre un proceso automatizado, modificando los estados de un sistema.
Sistema Integrador Ciencia y tecnología ACTUADORES ACTUADORES Se denominan actuadores a aquellos elementos que pueden provocar un efecto sobre un proceso automatizado, modificando los estados de un sistema.
Gearbox. Actuadores rotativos de compuertas para instalaciones de ventilación y clima
 Actuadores rotativos de compuertas para instalaciones de ventilación y clima Actuadores Rotativos Nuestra amplia gama de actuadores Gearbox ha sido desarrollada para cubrir las necesidades específi cas
Actuadores rotativos de compuertas para instalaciones de ventilación y clima Actuadores Rotativos Nuestra amplia gama de actuadores Gearbox ha sido desarrollada para cubrir las necesidades específi cas
Sistemas protésicos de rodilla
 Sistemas protésicos de rodilla Traducido a un lenguaje sencillo por Helen Osborne, de Health Literacy Consulting Artículo original de Bill Dupes, Prosthetic Knee Systems. Los sistemas protésicos de rodilla
Sistemas protésicos de rodilla Traducido a un lenguaje sencillo por Helen Osborne, de Health Literacy Consulting Artículo original de Bill Dupes, Prosthetic Knee Systems. Los sistemas protésicos de rodilla
CABLE DE COBRE AISLADO CON XLPE 0.6 / 1 kv TABLA I
 TABLA I SECCION N DE DIAM. ESPESOR DIÁMETRO PESO RESISTENCIA CORRIENTE (A) CODIGO NOMINAL HILO NOMINAL AISLACION MÁXIMO APROX. ELEC. MAX Temp Cond 90 C CRE AWG mm 2 COND. mm mm CON AISL Kg / Km 20 C Temp.
TABLA I SECCION N DE DIAM. ESPESOR DIÁMETRO PESO RESISTENCIA CORRIENTE (A) CODIGO NOMINAL HILO NOMINAL AISLACION MÁXIMO APROX. ELEC. MAX Temp Cond 90 C CRE AWG mm 2 COND. mm mm CON AISL Kg / Km 20 C Temp.
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL. Facultad de Ingeniería en Mecánica y Ciencias de la Producción TESIS DE GRADO
 ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL Facultad de Ingeniería en Mecánica y Ciencias de la Producción Diseño De Un Elevador Tipo Tijeras Para el Mantenimiento Automotriz TESIS DE GRADO Previo a la obtención
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL Facultad de Ingeniería en Mecánica y Ciencias de la Producción Diseño De Un Elevador Tipo Tijeras Para el Mantenimiento Automotriz TESIS DE GRADO Previo a la obtención
Resumen. Abstract INTRODUCCIÓN.
 METODOLOGÍA PARA SELECCIÓN DE MATERIALES EN INGENIERÍA MECATRÓNICA, William E. Diaz Moreno, Universidad Militar Nueva Granada Nelson F. Velasco Toledo, Universidad Militar Nueva Granada Resumen Durante
METODOLOGÍA PARA SELECCIÓN DE MATERIALES EN INGENIERÍA MECATRÓNICA, William E. Diaz Moreno, Universidad Militar Nueva Granada Nelson F. Velasco Toledo, Universidad Militar Nueva Granada Resumen Durante
Serie CST Cilindros de Tope
 Cilindros de Tope Actuadores Cilindros Compactos y de Carrera Corta: Contenido Cilindros de tope Características 486 Cómo ordenar 487 Guía de selección 488 Identificación de componentes y tabla de pesos
Cilindros de Tope Actuadores Cilindros Compactos y de Carrera Corta: Contenido Cilindros de tope Características 486 Cómo ordenar 487 Guía de selección 488 Identificación de componentes y tabla de pesos
TECNOLOGIA DE MAQUINAS
 TECNOLOGIA DE MAQUINAS (7.5 créditos, 3º industriales) Tema 1: INTRODUCCION 1.1 Diseño de máquinas. 1.2 El ciclo de vida del producto. 1.3 Las tecnologías informáticas. 1.4 Seguridad en el diseño. 1.5
TECNOLOGIA DE MAQUINAS (7.5 créditos, 3º industriales) Tema 1: INTRODUCCION 1.1 Diseño de máquinas. 1.2 El ciclo de vida del producto. 1.3 Las tecnologías informáticas. 1.4 Seguridad en el diseño. 1.5
Diseño de Elementos de Máquinas. Cuestionario. 1.- Resortes
 Diseño de Elementos de Máquinas Cuestionario. 1.- Resortes 1.- Clasificación de los resortes en base a su forma 2.- Defina la constante de un resorte 3.- Cómo afecta a la constante de rigidez del resorte:
Diseño de Elementos de Máquinas Cuestionario. 1.- Resortes 1.- Clasificación de los resortes en base a su forma 2.- Defina la constante de un resorte 3.- Cómo afecta a la constante de rigidez del resorte:
INGENIERÍA AUTOMOTRIZ
 INGENIERÍA AUTOMOTRIZ DISEÑO Y CONSTRUCCIÓN DE UN BANCO DE PRUEBAS DINAMOMÉTRICO PARA MOTOS DE 125 CENTÍMETROS CÚBICOS DIRECTOR: Ing. Guido Torres CODIRECTOR: Ing. Juan Rocha AUTORES: Iván Cando P. Israel
INGENIERÍA AUTOMOTRIZ DISEÑO Y CONSTRUCCIÓN DE UN BANCO DE PRUEBAS DINAMOMÉTRICO PARA MOTOS DE 125 CENTÍMETROS CÚBICOS DIRECTOR: Ing. Guido Torres CODIRECTOR: Ing. Juan Rocha AUTORES: Iván Cando P. Israel
Programación Arduino Con Visualino
 Programación Arduino Con Visualino Ponente: Ing. Patricio Tisalema ROBOTS FAMOSOS Y NO TAN FAMOSOS PERO SÍ CERCANOS QUÉ ES ROBOT? Es un sistema electro-mecánico que por su apariencia de movimientos, ofrece
Programación Arduino Con Visualino Ponente: Ing. Patricio Tisalema ROBOTS FAMOSOS Y NO TAN FAMOSOS PERO SÍ CERCANOS QUÉ ES ROBOT? Es un sistema electro-mecánico que por su apariencia de movimientos, ofrece
Características. Opciones. Potenciómetro Protección IP65. Diagrama de características. Velocidad/Par. Intensidad/Par
 Características Temperatura ambiente 15ºC a + 65ºC Lubricación de por vida Tubo de aluminio Protector de tubo de aluminio Engranajes metálicos Finales de carrera integrados Ciclo de funcionamiento 25%
Características Temperatura ambiente 15ºC a + 65ºC Lubricación de por vida Tubo de aluminio Protector de tubo de aluminio Engranajes metálicos Finales de carrera integrados Ciclo de funcionamiento 25%
Soluciones Analíticas de Navier Stokes.
 1 Soluciones Analíticas de Navier Stokes. Problema 1 Un fluido newtoniano fluye en el huelgo formado por dos placas horizontales. La placa superior se mueve con velocidad u w, la inferior está en reposo.
1 Soluciones Analíticas de Navier Stokes. Problema 1 Un fluido newtoniano fluye en el huelgo formado por dos placas horizontales. La placa superior se mueve con velocidad u w, la inferior está en reposo.
Puentes Flexion Media Capacidad PFL.m kn/longitud - 3 y 4 Puntos
 Puentes Flexion Media Capacidad PFL.m 50-100 kn/longitud - 3 y 4 Puntos - Capacidad 50 kn (Estructura fabricada en Aluminio) - Capacidad 100 kn (Estructura fabricada en Acero) - Separacion entre apoyos
Puentes Flexion Media Capacidad PFL.m 50-100 kn/longitud - 3 y 4 Puntos - Capacidad 50 kn (Estructura fabricada en Aluminio) - Capacidad 100 kn (Estructura fabricada en Acero) - Separacion entre apoyos
RheolabQC. Rheómetro Rotacional para Control de Calidad. ::: Intelligence in Rheometry
 RheolabQC Rheómetro Rotacional para Control de Calidad ::: Intelligence in Rheometry Reómetro rotacional de Control de Calidad Mediciones de viscosidad y pruebas reológicas rutinarias y sencillas para
RheolabQC Rheómetro Rotacional para Control de Calidad ::: Intelligence in Rheometry Reómetro rotacional de Control de Calidad Mediciones de viscosidad y pruebas reológicas rutinarias y sencillas para
"DISEÑO DE UN REBANADOR DE BANANO PARA LA PRODUCCION DE HARINA A NIVEL ARTESANAL"
 "DISEÑO DE UN REBANADOR DE BANANO PARA LA PRODUCCION DE HARINA A NIVEL ARTESANAL" RESPONSABLES Ing. Xavier Villacís Peñaherrera IMPACTO DE LA NECESIDAD PRODUCCIÓN DE HARINA DE BANANO Comunidades campesinas
"DISEÑO DE UN REBANADOR DE BANANO PARA LA PRODUCCION DE HARINA A NIVEL ARTESANAL" RESPONSABLES Ing. Xavier Villacís Peñaherrera IMPACTO DE LA NECESIDAD PRODUCCIÓN DE HARINA DE BANANO Comunidades campesinas
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL FACULTAD DE CIENCIAS NATURALES Y MATEMÁTICAS DEPARTAMENTO DE FÍSICA
 ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL FACULTAD DE CIENCIAS NATURALES Y MATEMÁTICAS DEPARTAMENTO DE FÍSICA SEGUNDA EVALUACIÓN DE FÍSICA A SEPTIEMBRE 3 DE 2014 SOLUCIÓN Pregunta 1 (2 puntos) Un grifo
ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL FACULTAD DE CIENCIAS NATURALES Y MATEMÁTICAS DEPARTAMENTO DE FÍSICA SEGUNDA EVALUACIÓN DE FÍSICA A SEPTIEMBRE 3 DE 2014 SOLUCIÓN Pregunta 1 (2 puntos) Un grifo
LABORATORIO DE FENÓMENOS COLECTIVOS
 LABORATORIO DE FENÓMENOS COLECTIVOS LA VISCOSIDAD DE LOS LÍQUIDOS CRUZ DE SAN PEDRO JULIO CÉSAR RESUMEN La finalidad de esta práctica es la determinación de la viscosidad de diferentes sustancias (agua,
LABORATORIO DE FENÓMENOS COLECTIVOS LA VISCOSIDAD DE LOS LÍQUIDOS CRUZ DE SAN PEDRO JULIO CÉSAR RESUMEN La finalidad de esta práctica es la determinación de la viscosidad de diferentes sustancias (agua,
TRABAJO FIN DE GRADO 2016 DISEÑO Y CÁLCULO DE UN REDUCTOR DE VELOCIDAD CON RELACIÓN DE TRANSMISION 16,01 Y PAR MÁXIMO A LA SALIDA DE 2388 NM
 TRABAJO FIN DE GRADO 2016 DISEÑO Y CÁLCULO DE UN REDUCTOR DE VELOCIDAD CON RELACIÓN DE TRANSMISION 16,01 Y PAR MÁXIMO A LA SALIDA DE 2388 NM AUTOR: SÍMÓN TERUEL PARDO TUTOR: JOSÉ ENRIQUE TARANCÓN CARO
TRABAJO FIN DE GRADO 2016 DISEÑO Y CÁLCULO DE UN REDUCTOR DE VELOCIDAD CON RELACIÓN DE TRANSMISION 16,01 Y PAR MÁXIMO A LA SALIDA DE 2388 NM AUTOR: SÍMÓN TERUEL PARDO TUTOR: JOSÉ ENRIQUE TARANCÓN CARO
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE CLASIFICACIÓN DIDÁCTICO PARA SUPERVISAR UN PROCESO INDUSTRIAL EN LABORATORIO DE HIDRÓNICA Y NEUTRÓNICA
 DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE CLASIFICACIÓN DIDÁCTICO PARA SUPERVISAR UN PROCESO INDUSTRIAL EN LABORATORIO DE HIDRÓNICA Y NEUTRÓNICA PROYECTO REALIZADO POR: MAYRA TAMARA JARAMILLO M. DIRECTOR
DISEÑO E IMPLEMENTACIÓN DE UN SISTEMA DE CLASIFICACIÓN DIDÁCTICO PARA SUPERVISAR UN PROCESO INDUSTRIAL EN LABORATORIO DE HIDRÓNICA Y NEUTRÓNICA PROYECTO REALIZADO POR: MAYRA TAMARA JARAMILLO M. DIRECTOR
FECHA DE ASIGNACIÓN: 05 - febrero
 UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FISICOMECÁNICAS ESCUELA DE INGENIERÍA ELÉCTRICA, ELECTRÓNICA Y TELECOMUNICACIONES Programa de Ingeniería Eléctrica NOMBRE DE LA ASIGNATURA: CONTROL
UNIVERSIDAD INDUSTRIAL DE SANTANDER FACULTAD DE INGENIERÍAS FISICOMECÁNICAS ESCUELA DE INGENIERÍA ELÉCTRICA, ELECTRÓNICA Y TELECOMUNICACIONES Programa de Ingeniería Eléctrica NOMBRE DE LA ASIGNATURA: CONTROL