Robótica Modular y Locomoción: Robots Cube Revolutions y Multicube
|
|
|
- Juan José de la Fuente Murillo
- hace 5 años
- Vistas:
Transcripción
1 Robótica Modular y Locomoción: Robots Cube Revolutions y Multicube Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Universidad Rey Juan Carlos (URJC). Madrid. Enero 2006
2 índice Introducción: Robótica modular Módulos Y1 Locomoción de robots ápodos: Cube Revolutions Lomoción de configuraciones mínimas Multicube Conclusiones y trabajo futuro
3 Introducción: Robótica modular
4 Introducción Robótica Modular (I) Construcción de robots a partir de módulos Diseño centrado en el módulo, no en un robot particular Uno de los padres fue Mark Yim, investigador del PARC Nacimiento de la Robótica modular reconfigurable (1994): Por qué no trabajar en una nueva línea de investigación en la que se diseñen robots modulares que se adaptan al terreno, modificando su forma y la manera de desplazarse?




5 Introducción Robótica Modular (II) Polypod: 1994 Módulos con 2 grados libertad



6 Introducción Robótica Modular (II) 1997: Polybot G1 Módulos con 1 grado Primer experimento de reconfiguración simple



7 Introducción Robótica Modular (III) Polybot G1.4 Electrónica y alimentación en el propio módulo Sensores PIC16F877





8 Introducción Robótica Modular (IV) Polybot G2 Motor DC CPU: Power PC 555 Bus Can Reconfiguración dinámica

9 Introducción Robótica Modular (V) Ultima generación: Polybot G3 5x5x4.5cm Resumen Polybot Módulos con 1 DOF Mecánicamente más simples Conexión fase-desfase Reconfiguración Dinámica Consolidación Robótica Modular Reconfigurable

10 Módulos Y1
 para investigar en este campo de la robótica Creados los módulos Y1, inspirados en la primera generación de Polybot.")
11 Módulos Y1: Introducción Cómo comenzar a investigar en robótica modular? Necesario disponer de una plataforma (unos módulos) para investigar en este campo de la robótica Creados los módulos Y1, inspirados en la primera generación de Polybot. Los módulos Y1 son LIBRES: los planos están disponibles para que otros investigadores los puedan construir, modificar y distribuir. Además se han diseñado usando sólo herramientas libres

12 Módulos Y1: Características Material: PVC o metacrilato de 3mm Servo del tipo Futaba 3003 Dimensiones: 52x52x72mm Rango de movimiento: 180 grados Conexión en fase y desfase: Vídeo

13 Módulos Y1: Herramientas diseño Sólo se han empleado herramientas libres. Quedan garantizadas las libertades: cualquiera puede estudiar, modificar y distrubir los planos, sin depender de software propietario. Planos: QCAD Modelo 3D: Blender

14 Modulos Y1: Diseño 3D con Blender






15 Módulos Y1: Montaje


16 Módulos Y1: Configuraciones (I) Configuraciones: Las diferentes maneras en las que se pueden unir todos los módulos Las configuraciones más simples con las cadenas Permiten construir gusanos y serpientes Misma orientación Modulos rotados

17 Módulos Y1: Configuraciones (II) Pero se pueden tener otras configuraciones más complejas... Con bifurcaciones...
 Estructuras 2D")
18 Módulos Y1: Topologías 1D: Cadenas de módulos (Gusanos) Estructuras 2D Estructuras 3D
19 Módulos Y1: Configuraciones (III) Y la pregunta es... Hasta cuánto de complejas? No hay limitaciones geométricas... Potencialmente hay infinitas configuraciones... Las limitaciones que aparecerán será por: Consumo Comunicaciones Cableado... Hasta el infinito y más allá...




20 Módulos Y1: Electrónica La electrónica se sitúa fuera de los módulos Se utiliza un microprocesador de 8 bits para generar las señales de PWM de posicionamiento de los servos El micro se conecta al PC por RS-232 Proyecto Stargate RS-232 PC Alimentación PWM
21 Módulos Y1: API SERVOS8 La posición de los servos se controla desde el PC a través de una API en C Las aplicaciones pueden utilizar los servos como si fuesen periféricos del PC Esto permite desarrollar algoritmos más potentes. Aplicación API Servos8 En la implementación actual, sólo se pueden posicionar hasta 8 servos Servos8 RS-232
22 Módulos Y1: CONTROL Cómo definir, almacenar y reproducir una secuencia de movimiento? En un instante, cada módulo está rotado un cierto ángulo El estado de mi robot, en un instante, viene determinado por los ángulos de todos sus módulos. Esto lo representamos mediante un vector de estado (o vector de posición angular). Cada componente del vector contiene el ángulo de cada uno de los módulos: 3 2 ϕ2 ϕ ϕ1 ϕ4 5 ϕ5 ϕ6 ϕ (t i ) =[ ϕ1 ϕ 2 ϕ 3 ϕ 4 ϕ 5 ϕ 6 ]
23 Módulos Y1: CONTROL (II) Una secuencia de movimiento se describe mediante una matriz, en la que cada fila representa un vector de estado en un instante El controlador sólo tiene que recorrer esta matriz, posicionando los módulos en los ángulos indicados [ [ [ [ [ [ [ [ [ [ [ ] -15 ] -7 ] -2 ] 4 ] 12 ] 14 ] 19 ] 21 ] 22 ] 18 ] Vector Instante t1 Vector Instante t2 Vector Instante t3... Vector Instante tn


24 Módulos Y1: CONTROL (III) Para la generación de secuencias manuales y su reproducción se utiliza una aplicación gráfica Aplicación Star-servos8 Lenguaje C Librería gráfica: GTK 2.0 Entorno Linux
25 Módulos Y1: Trabajos futuros AUTONOMÍA: Nuevo módulo con la electrónica y alimentación incorporadas. Eliminación de los cables externos. VERSATILIDAD: Utilizar FPGA's para cada módulo en vez de un procesador convencional INTERACCIÓN CON ENTORNO: Incluir sensores RECONFIGURACIÓN MECÁNICA: Módulos capaces de unirse y separarse entre ellos RECONFIGURACIÓN HARDWARE: Posibilidad de cambiar el hardware en tiempo real, por medio de FPGAs
26 Locomoción de robots ápodos:
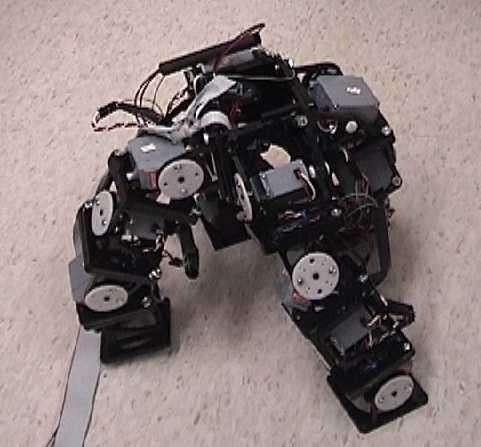
27 Cube Revolutions: Mecánica Configuración: 8 módulos Y1 conectados en fase: Módulo Y1 Dimensiones: 52x52x576mm: Cube Revolutions
 Se")


28 Cube Revolutions: Cableado Dos placas "pasivas" (Matrix) Se conectan 4 servos a cada una Interconectadas mediante cable plano de bus El bus lleva las señales de los 8 servos + la alimentación (VCC y GND)




29 Cube Revolutions: Propiedades robots ápodos Una de las características de los robots ápodos es que pueden cambiar su forma: Demo
30 Cube Revolutions: Problema de la locomoción Cómo conseguir que un robot ápodo se desplace? Para ello hay que responder a las siguientes preguntas: 1.- Cómo coordinar las articulaciones para que se desplace? 2.- Cómo generar automáticamente las secuencias de movimiento (matrices)? 3.- Cómo controlar el tipo de movimiento y su velocidad?


31 Cube Revolutions: Coordinación Cómo coordinar las articulaciones para que se desplace? En la naturaleza nos encontramos un modelo de propagación de ondas
32 Cube Revolutions: Coordinación (II) Cómo generar las secuencias de movimiento (matrices)? Aplicando el modelo de programación de ondas y el algoritmo de ajuste
33 Cube Revolutions: Coordinación (III) Para cada desplazamiento de la onda se calcula el nuevo vector de estado Después de desplazar la onda una distancia igual a su longitud de onda, ya se tiene la matriz creada Visualmente, la manera de generar las matrices de movimiento es: La animación de esta matriz, sin visualizar las ondas es:

34 Cube Revolutions: Coordinación (IV) Cómo controlar el tipo de movimiento y su velocidad? Las características del movimiento vienen dadas por la onda aplicada y sus parámetros (amplitud, longitud de onda, frecuencia...)

35 Cube Revolutions: Software Demo

36 Cube Revolutions: Trabajos futuros Modelo físico del gusano para la evaluación de las secuencias de movimiento Optimización de secuencias: Cual es la secuencia de óptima? Generación de secuencias mediante algoritmos genéticos Coordinación del movimiento en 2D: Hypercube
37 Locomoción de configuraciones mínimas: MULTICUBE
38 Multicube: Objetivos Geométricamente, no hay límite superior al número de módulos a utilizar. Pero... Cual es la configuración mínima que es capaz de desplazarse tanto en 1D como en 2D? Cómo hay que coordinar los servos para conseguir ese desplazamiento? Para responder a esas preguntas, se han construido tres configuraciones a las que llamamos Multicube
39 Multicube: Configuración PP (Pitch-Pitch) Pitch axis Dos módulos Y1 conectados en fase A pesar de la simplicidad, esta configuración se puede mover en línea recta (1D)
40 Multicube: Configuración PP (II) Para la generación de movimiento se ha seguido un enfoque diferente: 1 ϕ1 = Asin( ϕ2 = Asin( 2 2π t) T 2π t+ φ ) T Los ángulos de cada módulo varían según una onda sinusoidal Las ondas sólo difieren en la fase φ Es precisamente esta fase la que determina la coordinación
41 Multicube: Configuración PP (III) Resultados: Mínimo número de módulos: 2 La mejor coordinación se consigue cuando la fase está comprendida entre 100 y 130 grados. Tel signo de la fase determina el sentido del movimiento La velocidad se puede controlar cambiando la amplitud
42 Multicube: Configuración PYP (Pitch-Yaw-Pitch) 1 Yaw Axis 2 3 Pitch axis Pitch axis El módulo central está conectado en desfase (rotado 90 grados) Esta configuración tiene varias maneras de moverse: Desplazamiento en línea recta (1D) Describir una trayectoria en arco (2D) Desplazarse lateralmente (Lateral shift gait) Rotar lateralmente (Lateral rolling gait)
43 Multicube: Configuración PYP (II) Desplazamiento en línea recta (1D) 1 ϕ1 = Asin( 2 2π t) T ϕ2 = 0 ϕ3 = Asin( 2π t + φ ) T Ángulo de la articulación 2 fijado a 0 grados Coordinación de las articulaciones 1 y 3 igual que en el caso PP (desfase entre 100 y 130 grados) 3
 T Ángulo de la articulación 2 fijado a un valor diferente de 0 grados 1 2")
44 Multicube: Configuración PYP (III) Trayectoria en arco (2D) ϕ1 = Asin( 2π t) T ϕ2 = 0 ϕ3 = Asin( 2π t + φ ) T Ángulo de la articulación 2 fijado a un valor diferente de 0 grados 1 2 3
 ϕ2 = Asin( 2 T ϕ3 = ϕ1 A<=40 Módulos 1 y 3 en fase Módulo 2 desfasado 90 grados 1 2")
45 Multicube: Configuración PYP (IV) Desplazamiento lateral ϕ1 = Asin( 2π t) T 2π t + π ) ϕ2 = Asin( 2 T ϕ3 = ϕ1 A<=40 Módulos 1 y 3 en fase Módulo 2 desfasado 90 grados 1 2 3
46 Multicube: Configuración PYP (V) Rotación lateral Aplicando la misma coordinación que la del desplazamiento lateral. Amplitud mayor de 60 grados El sentido de rotación se modifica cambiando la diferencia de fase con la articulación central.

47 Multicube: Configuración 2D en estrella (I) Ejemplo de una configuración mínima en 2D Tres módulos Y1 formando un ángulo de 120 grados El movimiento no es muy bueno. Tipos: Movimiento en línea recta (1D) a lo largo de 6 direcciones Rotación paralela al suelo
48 Multicube: Configuración 2D en estrella (II) Movimiento en 1D Tres ondas sinusoidales Para moverse en la dirección de indicada por la flecha roja: Módulos 2 y 3: onda en fase Módulo 1: onda con desfase entre 100 y 130
49 Multicube: Configuración 2D en estrella (III) Rotación Tres ondas sinusoidales, desfasadas 120 grados Movimiento lento de rotación paralelo al suelo
50 Demostración
51 Multicube Resumen Configuraciones de tipo cadena (1D) Con sólo dos módulos se consigue movimiento en 1D Añadiendo sólo un módulo más, aparecen tres nuevos tipos de movimiento: 2D, desplazamiento lateral y rotación Configuraciones en 2D Con sólo 3 módulos se consigue una configuración 2D que puede desplazarse por un plano Trabajo futuro Configuración mínima en 3D? Probar otras configuraciones: Esfera (rolling en 2D) Cruz
 Módulos Y1 Ir a Google Teclear: Módulos Y1 Pinchar en voy a")
52 Dónde está la información? Ir a Google Teclear: Cube Revolutions Pinchar en voy a tener suerte :-) Módulos Y1 Ir a Google Teclear: Módulos Y1 Pinchar en voy a tener suerte :-) Multicube Artículo sobre Multicube:
53 Robótica Modular y Locomoción: Robots Cube Revolutions y Multicube Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Universidad Rey Juan Carlos (URJC). Madrid. Enero 2006
Diseño de robots ápodos: Cube Revolutions
 Robolid'05 E. T. S. Ingenieros Industriales. UVa Diseño de robots ápodos: Cube Revolutions Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Robolid'05. Abril, 2005. E.T.S.
Robolid'05 E. T. S. Ingenieros Industriales. UVa Diseño de robots ápodos: Cube Revolutions Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Robolid'05. Abril, 2005. E.T.S.
Diseño de robots ápodos: Cube Revolutions
 CampusParty 2005 Area de CampusBot Diseño de robots ápodos: Cube Revolutions Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid CampusParty 2005. Valencia. Julio 2005 ÍNDICE
CampusParty 2005 Area de CampusBot Diseño de robots ápodos: Cube Revolutions Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid CampusParty 2005. Valencia. Julio 2005 ÍNDICE
Diseño de robots ápodos: Cube Revolutions
 Diseño de robots ápodos: Cube Revolutions Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Sicfima, Marzo 2004. ETSI Informática. UPM Introducción Robótica Dos grandes áreas:
Diseño de robots ápodos: Cube Revolutions Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Sicfima, Marzo 2004. ETSI Informática. UPM Introducción Robótica Dos grandes áreas:
Diseño de robots ápodos: Cube Revolutions
 IV SEMANA DE LA CIENCIA EN MADRID Universidad Pontificia de Salamanca en Madrid Diseño de robots ápodos: Cube Revolutions Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid
IV SEMANA DE LA CIENCIA EN MADRID Universidad Pontificia de Salamanca en Madrid Diseño de robots ápodos: Cube Revolutions Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid
Locomoción de un Robot Ápodo Modular con el Procesador MicroBlaze
 Locomoción de un Robot Ápodo Modular con el Procesador MicroBlaze Juan González Gómez, Estanislao Aguayo y Eduardo Boemo Escuela Politécnica Superior Universidad Autónoma de Madrid IV Jornadas sobre Computación
Locomoción de un Robot Ápodo Modular con el Procesador MicroBlaze Juan González Gómez, Estanislao Aguayo y Eduardo Boemo Escuela Politécnica Superior Universidad Autónoma de Madrid IV Jornadas sobre Computación
Robótica Modular y Locomoción Juan González Gómez
 Robótica Modular y Locomoción Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Programa para alumnos de altas capacidades Comunidad de Madrid. Abril de 2008 índice Introducción
Robótica Modular y Locomoción Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Programa para alumnos de altas capacidades Comunidad de Madrid. Abril de 2008 índice Introducción
Robótica modular y Locomoción
 Robótica modular y Locomoción Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid III Jornadas de robótica en la UCA Semana de la ciencia y la Tecnología Noviembre 2006 índice
Robótica modular y Locomoción Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid III Jornadas de robótica en la UCA Semana de la ciencia y la Tecnología Noviembre 2006 índice
Robótica Modular y Locomoción Juan González Gómez
 Robótica Modular y Locomoción Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid XI Semana de la investigación y la cultura en la facultad de Informática (UPM) Marzo-2007 índice
Robótica Modular y Locomoción Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid XI Semana de la investigación y la cultura en la facultad de Informática (UPM) Marzo-2007 índice
Diseño de robots ápodos: Cube Reloaded
 Diseño de robots ápodos: Cube Reloaded Juan González Gómez Tutor: Eduardo Boemo Trabajo de iniciación a la investigación, 2003 Escuela Politécnica Superior Universidad Autónoma de Madrid ÍNDICE 1. Introducción
Diseño de robots ápodos: Cube Reloaded Juan González Gómez Tutor: Eduardo Boemo Trabajo de iniciación a la investigación, 2003 Escuela Politécnica Superior Universidad Autónoma de Madrid ÍNDICE 1. Introducción
Robots ápodos modulares
 Robots ápodos modulares Juan González Gómez Dpto. Ingeniería de Sistemas y Automática Robotics Lab Universidad Carlos III de Madrid jggomez@ing.uc3m.es juan@iearobotics.com Área de ingeniería de Sistemas
Robots ápodos modulares Juan González Gómez Dpto. Ingeniería de Sistemas y Automática Robotics Lab Universidad Carlos III de Madrid jggomez@ing.uc3m.es juan@iearobotics.com Área de ingeniería de Sistemas
Diseño de robots ápodos: Cube Reloaded
 Diseño de robots ápodos: Cube Reloaded Juan González Gómez Tutor: Eduardo Boemo Trabajo de iniciación a la investigación, 2003 Escuela Politécnica Superior Universidad Autónoma de Madrid Índice Trayectoria
Diseño de robots ápodos: Cube Reloaded Juan González Gómez Tutor: Eduardo Boemo Trabajo de iniciación a la investigación, 2003 Escuela Politécnica Superior Universidad Autónoma de Madrid Índice Trayectoria
Evaluación de un Algoritmo de Locomoción de Robots Ápodos en Diferentes Procesadores Embebidos en una FPGA
 Evaluación de un Algoritmo de Locomoción de Robots Ápodos en Diferentes Procesadores Embebidos en una FPGA Juan González-Gómez, Ivan González, Francisco J. Gómez-Arribas y Eduardo Boemo Escuela Politécnica
Evaluación de un Algoritmo de Locomoción de Robots Ápodos en Diferentes Procesadores Embebidos en una FPGA Juan González-Gómez, Ivan González, Francisco J. Gómez-Arribas y Eduardo Boemo Escuela Politécnica
Robots ápodos modulares
 Robots ápodos modulares Juan González Gómez Dpto. Ingeniería de Sistemas y Automática Robotics Lab Universidad Carlos III de Madrid Juan González-Gómez jggomez@ing.uc3m.es juan@iearobotics.com Semana de
Robots ápodos modulares Juan González Gómez Dpto. Ingeniería de Sistemas y Automática Robotics Lab Universidad Carlos III de Madrid Juan González-Gómez jggomez@ing.uc3m.es juan@iearobotics.com Semana de
Robótica Modular y Locomoción
 Robótica Modular y Locomoción Dr. Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid III Jornadas de Robótica de A.R.D.E. 21-22 Marzo 2009. UNED. Madrid Robótica Gusanil (1)
Robótica Modular y Locomoción Dr. Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid III Jornadas de Robótica de A.R.D.E. 21-22 Marzo 2009. UNED. Madrid Robótica Gusanil (1)
Robótica modular y locomoción Dr. Juan González Gómez
 Robótica modular y locomoción Dr. Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Robótica Móvil: Una apuesta de futuro. Curso de Verano. UCLM. Albacete. 13-15 Julio 2009
Robótica modular y locomoción Dr. Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Robótica Móvil: Una apuesta de futuro. Curso de Verano. UCLM. Albacete. 13-15 Julio 2009
Robótica Modular y Locomoción Juan González Gómez
 Robótica Modular y Locomoción Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Máster de Sistemas Telemáticos e Informáticos. Universidad Rey Juan Carlos. 6-Mayo-2009 1 Robótica
Robótica Modular y Locomoción Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Máster de Sistemas Telemáticos e Informáticos. Universidad Rey Juan Carlos. 6-Mayo-2009 1 Robótica
Robótica y Linux. Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UPSAM
 Robótica y Linux Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UPSAM III Jornadas Software Libre, UPSAM
Robótica y Linux Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UPSAM III Jornadas Software Libre, UPSAM
Robots modulares Juan González Gómez
 Robots modulares Juan González Gómez Dpto. Ingeniería de Sistemas y Automática Robotics Lab Universidad Carlos III de Madrid Juan González-Gómez jggomez@ing.uc3m.es juan@iearobotics.com Programa para alumnos
Robots modulares Juan González Gómez Dpto. Ingeniería de Sistemas y Automática Robotics Lab Universidad Carlos III de Madrid Juan González-Gómez jggomez@ing.uc3m.es juan@iearobotics.com Programa para alumnos
Robótica Modular y locomoción: Aplicación a Robots Ápodos
 Robótica Modular y locomoción: Aplicación a Robots Ápodos D. Juan González Gómez Tesis Doctoral Director: Dr. Eduardo Boemo Scalvinoni Contenidos Contenidos 1. Introducción 2. Clasificación 3. Locomoción
Robótica Modular y locomoción: Aplicación a Robots Ápodos D. Juan González Gómez Tesis Doctoral Director: Dr. Eduardo Boemo Scalvinoni Contenidos Contenidos 1. Introducción 2. Clasificación 3. Locomoción
Sesión I: Robots en Directo
 Sesión I: Robots en Directo Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM ÍNDICE SKYBOT Robots articulados:
Sesión I: Robots en Directo Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM ÍNDICE SKYBOT Robots articulados:
Robótica en la Universidad
 Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Robots ápodos modulares
 Robots ápodos modulares Juan González Gómez Dpto. Ingeniería de Sistemas y Automática Robotics Lab Universidad Carlos III de Madrid Juan González-Gómez jggomez@ing.uc3m.es juan@iearobotics.com Máster de
Robots ápodos modulares Juan González Gómez Dpto. Ingeniería de Sistemas y Automática Robotics Lab Universidad Carlos III de Madrid Juan González-Gómez jggomez@ing.uc3m.es juan@iearobotics.com Máster de
Robótica en la Universidad
 Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Sesión II: Elementos de un Robot
 Sesión II: Elementos de un Robot Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Sesiones Robótica Comunidad de Madrid, UPSAM Abr, 2005 ÍNDICE Introducción Estructura mecánica Motores
Sesión II: Elementos de un Robot Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Sesiones Robótica Comunidad de Madrid, UPSAM Abr, 2005 ÍNDICE Introducción Estructura mecánica Motores
Locomoción de un Robot Ápodo Modular con el Procesador MicroBlaze
 Locomoción de un Robot Ápodo Modular con el Procesador MicroBlaze González-Gómez J., Aguayo E. y Boemo E. Escuela Politécnica Superior, Universidad Autónoma de Madrid, España, {Juan.Gonzalez, Estanislao.Aguayo,
Locomoción de un Robot Ápodo Modular con el Procesador MicroBlaze González-Gómez J., Aguayo E. y Boemo E. Escuela Politécnica Superior, Universidad Autónoma de Madrid, España, {Juan.Gonzalez, Estanislao.Aguayo,
Conclusiones. Capítulo Principales aportaciones
 Capítulo 8 Conclusiones Es la pregunta la que nos da fuerza. Es la duda la que te ha traído aquí. Trinity, en la película Matrix Este último capítulo se ha dividido en tres apartados. Comenzamos presentando
Capítulo 8 Conclusiones Es la pregunta la que nos da fuerza. Es la duda la que te ha traído aquí. Trinity, en la película Matrix Este último capítulo se ha dividido en tres apartados. Comenzamos presentando
Robótica y Linux: Cómo se hizo Cube Revolutions
 IV Jornadas de Software Libre en la UPSAM Robótica y Linux: Cómo se hizo Cube Revolutions Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid IV Jornadas Software Libre UPSAM.
IV Jornadas de Software Libre en la UPSAM Robótica y Linux: Cómo se hizo Cube Revolutions Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid IV Jornadas Software Libre UPSAM.
Son vanas y están plagadas de errores las ciencias que no han nacido del experimento, madre de toda certidumbre. Leonardo Da Vinci
 Capítulo 7 Experimentos Son vanas y están plagadas de errores las ciencias que no han nacido del experimento, madre de toda certidumbre. Leonardo Da Vinci 7.. Introducción En este capítulo se describen
Capítulo 7 Experimentos Son vanas y están plagadas de errores las ciencias que no han nacido del experimento, madre de toda certidumbre. Leonardo Da Vinci 7.. Introducción En este capítulo se describen
Son vanas y están plagadas de errores las ciencias que no han nacido del experimento, madre de toda certidumbre. Leonardo Da Vinci
 Capítulo 1 Experimentos Son vanas y están plagadas de errores las ciencias que no han nacido del experimento, madre de toda certidumbre. Leonardo Da Vinci 1.1. Introducción En este capítulo se describen
Capítulo 1 Experimentos Son vanas y están plagadas de errores las ciencias que no han nacido del experimento, madre de toda certidumbre. Leonardo Da Vinci 1.1. Introducción En este capítulo se describen
Prácticas de Sistemas Digitales y Robótica mediadas por Internet
 SUBPROYECTO: Prácticas de Sistemas Digitales y Robótica mediadas por Internet Cecilia García Cena Grupo de Innovación Educativa GSITAE 1 RESUMEN Este proyecto propone la creación de herramientas informáticas
SUBPROYECTO: Prácticas de Sistemas Digitales y Robótica mediadas por Internet Cecilia García Cena Grupo de Innovación Educativa GSITAE 1 RESUMEN Este proyecto propone la creación de herramientas informáticas
Introducción. Capítulo Presentación. This chapter has been translated into English. It can be found in page 9
 Capítulo 1 Introducción Mi obra es un juego, pero un juego muy serio. M.C Escher. This chapter has been translated into English. It can be found in page 9 En este primer capítulo introductorio se presenta
Capítulo 1 Introducción Mi obra es un juego, pero un juego muy serio. M.C Escher. This chapter has been translated into English. It can be found in page 9 En este primer capítulo introductorio se presenta
Evaluación de un Algoritmo de Locomoción de Robots Ápodos en Diferentes Procesadores Embebidos en FPGA
 Evaluación de un Algoritmo de Locomoción de Robots Ápodos en Diferentes Procesadores Embebidos en FPGA J. Gonzalez-Gomez, I. Gonzalez, F. J. Gomez-Arribas y E. Boemo Escuela Politécnica Superior, Universidad
Evaluación de un Algoritmo de Locomoción de Robots Ápodos en Diferentes Procesadores Embebidos en FPGA J. Gonzalez-Gomez, I. Gonzalez, F. J. Gomez-Arribas y E. Boemo Escuela Politécnica Superior, Universidad
CONSTRUCCIÓN DE UN BRAZO ROBOT PARA SERVIR DE PLATAFORMA DE APRENDIZAJE
 CONSTRUCCIÓN DE UN BRAZO ROBOT PARA SERVIR DE PLATAFORMA DE APRENDIZAJE 1. Introducción Cadena, A. 1 ; Cortéz, D. 2 1. Centro de Visión y Robótica, 2. FIEC {acadena, dcortez}@fiec.espol.edu.ec En el presente
CONSTRUCCIÓN DE UN BRAZO ROBOT PARA SERVIR DE PLATAFORMA DE APRENDIZAJE 1. Introducción Cadena, A. 1 ; Cortéz, D. 2 1. Centro de Visión y Robótica, 2. FIEC {acadena, dcortez}@fiec.espol.edu.ec En el presente
UNIDAD 11: CONTROL DE SERVOMOTORES
 UNIDAD 11: CONTROL DE SERVOMOTORES Objetivo y Programa de la Unidad 11 Objetivo de la presentación Estudiar las ideas principales y ejemplos básicos sobre el control servomotor en Arduino Programa de la
UNIDAD 11: CONTROL DE SERVOMOTORES Objetivo y Programa de la Unidad 11 Objetivo de la presentación Estudiar las ideas principales y ejemplos básicos sobre el control servomotor en Arduino Programa de la
Dispositivos de Entrada/Salida
 Dispositivos de Entrada/Salida Notas de clase: Unidad IV Materia: Diseño y Paradigmas de Lenguajes Carrera: Ingeniería en Informática/Ingeniería en Computación Universidad Nacional de San Luis 20/09/2017
Dispositivos de Entrada/Salida Notas de clase: Unidad IV Materia: Diseño y Paradigmas de Lenguajes Carrera: Ingeniería en Informática/Ingeniería en Computación Universidad Nacional de San Luis 20/09/2017
CONSTRUCION DE UN BRAZO ROBÓTICO E INTERFACE DE CONTROL PARA UN SISTEMA EMPOTRADO BASADO EN EL SISTEMA OPERATIVO RTEMS
 CONSTRUCION DE UN BRAZO ROBÓTICO E INTERFACE DE CONTROL PARA UN SISTEMA EMPOTRADO BASADO EN EL SISTEMA OPERATIVO RTEMS AUTOR: ROBERTO RICA GUTIÉRREZ TUTOR: JUAN ZAMORANO FLORES D.A.T.S.I. Facultad de Informática
CONSTRUCION DE UN BRAZO ROBÓTICO E INTERFACE DE CONTROL PARA UN SISTEMA EMPOTRADO BASADO EN EL SISTEMA OPERATIVO RTEMS AUTOR: ROBERTO RICA GUTIÉRREZ TUTOR: JUAN ZAMORANO FLORES D.A.T.S.I. Facultad de Informática
Prácticas de bajo coste de ISA en la UCM
 Prácticas de bajo coste de ISA en la UCM José A. López Orozco José Mª Girón Sierra Bonifacio Andrés-Toro Eva Besada Portas Jesús M. de la Cruz Ingeniería de Sistemas y Automática Arquitectura de Computadores
Prácticas de bajo coste de ISA en la UCM José A. López Orozco José Mª Girón Sierra Bonifacio Andrés-Toro Eva Besada Portas Jesús M. de la Cruz Ingeniería de Sistemas y Automática Arquitectura de Computadores
Introducción. 2.2 Transformaciones de coordenadas: matriz de rotación y ángulos de Euler.
 Agosto 2011 Introducción El análisis cinemático directo nos permite determinar en donde se encuentra el elemento terminal del robot (mano) si se conoce la posición de todas las articulaciones. 15 50 Posición?
Agosto 2011 Introducción El análisis cinemático directo nos permite determinar en donde se encuentra el elemento terminal del robot (mano) si se conoce la posición de todas las articulaciones. 15 50 Posición?
Introducción a la Robótica Mecanismos básicos: cinemática
 Introducción a la Robótica Mecanismos básicos: cinemática Dr José Martínez Carranza carranza@inaoep.mx Coordinación de Ciencias Computacionales, INAOE Cinemática (1) La cinemática es una rama de la Física
Introducción a la Robótica Mecanismos básicos: cinemática Dr José Martínez Carranza carranza@inaoep.mx Coordinación de Ciencias Computacionales, INAOE Cinemática (1) La cinemática es una rama de la Física
Laboratorio de Robótica Curso (2º semestre)
") Laboratorio de Robótica Curso 2011-2012 (2º semestre) Universidad Autónoma de Madrid Escuela Politécnica Superior Índice 1. Presentación 2. Normas del laboratorio 3. Prácticas 4. GPBOT: Kit Básico de Robótica
Laboratorio de Robótica Curso 2011-2012 (2º semestre) Universidad Autónoma de Madrid Escuela Politécnica Superior Índice 1. Presentación 2. Normas del laboratorio 3. Prácticas 4. GPBOT: Kit Básico de Robótica
Cinemática del Robot. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
INSTITUTO TECNOLÓGICO DE VERACRUZ RESUMEN DE LA UNIDAD II: PROGRAMACION DE ROBOTS
 INSTITUTO TECNOLÓGICO DE VERACRUZ CARRERA: INGENIERIA MECATRÓNICA CATEDRATICO: DR. JOSÉ ANTONIO GARRIDO NATARÉN RESUMEN DE LA UNIDAD II: PROGRAMACION DE ROBOTS MATERIA: ROBOTICA GRUPO: 9F1B EQUIPO 1 CURIE
INSTITUTO TECNOLÓGICO DE VERACRUZ CARRERA: INGENIERIA MECATRÓNICA CATEDRATICO: DR. JOSÉ ANTONIO GARRIDO NATARÉN RESUMEN DE LA UNIDAD II: PROGRAMACION DE ROBOTS MATERIA: ROBOTICA GRUPO: 9F1B EQUIPO 1 CURIE
SUPER CONTROLADOR DE SERVOS S310175
 SUPER CONTROLADOR DE SERVOS S310175 Controlador para servos con retroalimentación del par motor No es necesario realizar modificaciones a los servos Características: Sus ocho salidas independientes de
SUPER CONTROLADOR DE SERVOS S310175 Controlador para servos con retroalimentación del par motor No es necesario realizar modificaciones a los servos Características: Sus ocho salidas independientes de
3.3.2 Un programa cliente: futaba.c Adaptación a motores de corriente continua... 65
 Índice General 1 La evolución de la robótica 1 1.1 Marco general del proyecto............................ 1 1.2 Torre Bot: Etapas en la construcción de un robot................ 6 1.3 Planificación del
Índice General 1 La evolución de la robótica 1 1.1 Marco general del proyecto............................ 1 1.2 Torre Bot: Etapas en la construcción de un robot................ 6 1.3 Planificación del
4 Actuadores eléctricos. Alfaomega. Material Web. Arduino control de servomotores a pasos 2
 4 Actuadores eléctricos Capítulo Material Web Arduino control de servomotores a pasos 2 2 Actuadores eléctricos 4.1. 4.1 Arduino control de servomotores a pasos Un servomotor de pasos es un sistema formado
4 Actuadores eléctricos Capítulo Material Web Arduino control de servomotores a pasos 2 2 Actuadores eléctricos 4.1. 4.1 Arduino control de servomotores a pasos Un servomotor de pasos es un sistema formado
PROGRAMACIÓN ROBOT MOVIL
 Laboratorio de Métodos Computacionales PROGRAMACIÓN ROBOT MOVIL Equipo Meyer Fecha de realización: 31 de octubre de 2012 Participantes: Esteban Agüero, Pedro Ascencio, Camila Caviedes, Cecilia Hormazábal,
Laboratorio de Métodos Computacionales PROGRAMACIÓN ROBOT MOVIL Equipo Meyer Fecha de realización: 31 de octubre de 2012 Participantes: Esteban Agüero, Pedro Ascencio, Camila Caviedes, Cecilia Hormazábal,
Diseño e implementación de una plataforma robótica móvil inalámbrica con tracción intercambiable para el laboratorio de Mecatrónica de la ESPE-L
 Diseño e implementación de una plataforma robótica móvil inalámbrica con tracción intercambiable para el laboratorio de Mecatrónica de la ESPE-L Por Paúl Tinizaray Características del terreno Conocer las
Diseño e implementación de una plataforma robótica móvil inalámbrica con tracción intercambiable para el laboratorio de Mecatrónica de la ESPE-L Por Paúl Tinizaray Características del terreno Conocer las
Alternativas Hardware para la Locomoción de un Robot
 Alternativas Hardware para la Locomoción de un Robot Ápodo González J., González I. y Boemo E. Escuela Politécnica Superior, Universidad Autónoma de Madrid, España, {Juan.Gonzalez, Ivan.Gonzalez, Eduardo.Boemo}@ii.uam.es
Alternativas Hardware para la Locomoción de un Robot Ápodo González J., González I. y Boemo E. Escuela Politécnica Superior, Universidad Autónoma de Madrid, España, {Juan.Gonzalez, Ivan.Gonzalez, Eduardo.Boemo}@ii.uam.es
Fundamentos en Robótica. Unidad 2.2 Elementos estructurales
 Fundamentos en Robótica Unidad 2.2 Elementos estructurales Temario Chasis Sensores Articulaciones Actuadores Plataformas de cómputo Suministro de Energía Comunicaciones Actuadores medio sensores control
Fundamentos en Robótica Unidad 2.2 Elementos estructurales Temario Chasis Sensores Articulaciones Actuadores Plataformas de cómputo Suministro de Energía Comunicaciones Actuadores medio sensores control
ENTORNO DE SIMULACIÓN Y CONTROL DE UN ROBOT VELOCISTA
 ENTORNO DE SIMULACIÓN Y CONTROL DE UN ROBOT VELOCISTA PROYECTO FIN DE CARRERA Departamento de Electrónica. Universidad de Alcalá. Ingeniería Técnica de Telecomunicación. Especialidad en Sistemas Electrónicos
ENTORNO DE SIMULACIÓN Y CONTROL DE UN ROBOT VELOCISTA PROYECTO FIN DE CARRERA Departamento de Electrónica. Universidad de Alcalá. Ingeniería Técnica de Telecomunicación. Especialidad en Sistemas Electrónicos
Actuadores eléctricos - Motores
 Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
FACULTAD DE INGENIERÍA CARRERA DE INGENIERÍA ELECTRÓNICA DISEÑO E IMPLEMENTACIÓN DE UN ROBOT GUSANO MULTICUERPO OSCAR GABRIEL LA TORRE SALIN
 UNIVERSIDAD PERUANA DE CIENCIAS APLICADAS FACULTAD DE INGENIERÍA CARRERA DE INGENIERÍA ELECTRÓNICA TEMA DE TESIS: DISEÑO E IMPLEMENTACIÓN DE UN ROBOT GUSANO MULTICUERPO AUTOR: OSCAR GABRIEL LA TORRE SALIN
UNIVERSIDAD PERUANA DE CIENCIAS APLICADAS FACULTAD DE INGENIERÍA CARRERA DE INGENIERÍA ELECTRÓNICA TEMA DE TESIS: DISEÑO E IMPLEMENTACIÓN DE UN ROBOT GUSANO MULTICUERPO AUTOR: OSCAR GABRIEL LA TORRE SALIN
Hardware Libre: Conociendo las tripas
 Hardware Libre: Conociendo las tripas Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Jornadas de Software Libre en la UAM Marzo, 2007 ÍNDICE Introducción Conceptos de Hardware
Hardware Libre: Conociendo las tripas Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Jornadas de Software Libre en la UAM Marzo, 2007 ÍNDICE Introducción Conceptos de Hardware
Nunchuk RoboArm. Trabajo Fin de Master
 Nunchuk RoboArm Trabajo Fin de Master José Alberto Rosales Navarro. Máster Interuniversitario de Ingeniería de Telecomunicación Universitat Oberta de Catalunya Curso académico 2015-2016 Introducción Gran
Nunchuk RoboArm Trabajo Fin de Master José Alberto Rosales Navarro. Máster Interuniversitario de Ingeniería de Telecomunicación Universitat Oberta de Catalunya Curso académico 2015-2016 Introducción Gran
Capítulo 3: Implementación hardware mediante plataforma en tiempo real. Capítulo 3 Implementación hardware mediante plataforma en tiempo real 33
 Capítulo 3 Implementación hardware mediante plataforma en tiempo real 33 Capítulo 3: Implementación hardware mediante plataforma en tiempo real En el presente capítulo se va a describir los desarrollos
Capítulo 3 Implementación hardware mediante plataforma en tiempo real 33 Capítulo 3: Implementación hardware mediante plataforma en tiempo real En el presente capítulo se va a describir los desarrollos
Controladora de 3 ejes con Control Manual. M-TB3DV-N
 Controladora de 3 ejes con Control Manual. M-TB3DV-N Prestaciones generales: - Diseño de uso profesional con proceso de señal de dos fases. - Máximo de de control de corriente de 3.5A para motores de hasta
Controladora de 3 ejes con Control Manual. M-TB3DV-N Prestaciones generales: - Diseño de uso profesional con proceso de señal de dos fases. - Máximo de de control de corriente de 3.5A para motores de hasta
PRÓLOGO PREFACIO... 21
 ÍNDICE PRÓLOGO... 17 PREFACIO... 21 CAPÍTULO 1. ENTORNO ACTUAL Y PERSPECTIVAS... 27 1.1 ORGANIZACIÓN DE UN SISTEMA ROBÓTICO... 29 1.2 ENTORNOS MATLAB Y SIMULINK... 31 1.3 TENDENCIAS EN ROBÓTICA Y MECATRÓNICA...
ÍNDICE PRÓLOGO... 17 PREFACIO... 21 CAPÍTULO 1. ENTORNO ACTUAL Y PERSPECTIVAS... 27 1.1 ORGANIZACIÓN DE UN SISTEMA ROBÓTICO... 29 1.2 ENTORNOS MATLAB Y SIMULINK... 31 1.3 TENDENCIAS EN ROBÓTICA Y MECATRÓNICA...
Percepción visual aplicada a la robótica
 Percepción visual aplicada a la robótica Mario I. Chacón Murguía Rafael Sandoval Rodríguez Javier Vega Pineda Selecciona el libro para empezar Capítulo 2 Teoría de robótica Continuar Cinemática de robots
Percepción visual aplicada a la robótica Mario I. Chacón Murguía Rafael Sandoval Rodríguez Javier Vega Pineda Selecciona el libro para empezar Capítulo 2 Teoría de robótica Continuar Cinemática de robots
Visión artificial y Robótica Modelos de movimiento y mapas. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Modelos de movimiento y mapas Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sistemas de coordenadas Localización de objetos en el espacio Modelos
Visión artificial y Robótica Modelos de movimiento y mapas Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Sistemas de coordenadas Localización de objetos en el espacio Modelos
Catálogo de venta. Kits de robótica My Robot Time MRT LOGIX5 SMART SOLUTIONS
 Catálogo de venta Kits de robótica My Robot Time MRT 1 Dos líneas de productos Línea educativa: Kits orientados a cursos y talleres de robótica y programación, con manuales detallados (en inglés) para
Catálogo de venta Kits de robótica My Robot Time MRT 1 Dos líneas de productos Línea educativa: Kits orientados a cursos y talleres de robótica y programación, con manuales detallados (en inglés) para
INTRODUCCIÓN A LA MECÁNICA DEL ROBOT. Curso de Extensión. Tema 2. Laboratorio de Robótica Aplicada (LABRA) 1
 1") Curso de Extensión INTRODUCCIÓN A LA ROBÓTICA MÓVILM (LABRA) 1 Curso de Introducción n a la Robótica MóvilM Tema 2 MECÁNICA DEL ROBOT (LABRA) 2 La Capa Física: F Diseño o Mecánico Configuración de las
Curso de Extensión INTRODUCCIÓN A LA ROBÓTICA MÓVILM (LABRA) 1 Curso de Introducción n a la Robótica MóvilM Tema 2 MECÁNICA DEL ROBOT (LABRA) 2 La Capa Física: F Diseño o Mecánico Configuración de las
Cinemática Directa. Facultad de Cs. de la Computación. Juan Carlos Conde Ramírez. Computer Animation
 Cinemática Directa Facultad de Cs. de la Computación Juan Carlos Conde Ramírez Computer Animation Contenido 1 Introducción 2 Transformaciones homogéneas 3 Cinemática directa 4 Método Denavit-Hartenberg
Cinemática Directa Facultad de Cs. de la Computación Juan Carlos Conde Ramírez Computer Animation Contenido 1 Introducción 2 Transformaciones homogéneas 3 Cinemática directa 4 Método Denavit-Hartenberg
ROBOTS MODULARES. Introducción al diseño de Microrrobots Móviles
 ROBOTS MODULARES Introducción al diseño de Microrrobots Móviles Manuel Losada Rodríguez Ricardo Guerrero Gómez-Olmedo Verónica Bartolomé Pablo Pérez Hernández Daniel Borja Pérez Adrián Sánchez 2 INDICE
ROBOTS MODULARES Introducción al diseño de Microrrobots Móviles Manuel Losada Rodríguez Ricardo Guerrero Gómez-Olmedo Verónica Bartolomé Pablo Pérez Hernández Daniel Borja Pérez Adrián Sánchez 2 INDICE
Robótica con ladrillos LEGO
 Robótica con ladrillos LEGO José María Cañas Plaza jmplaza@gsyc.escet.urjc.es Abril 2003 Índice del curso 1 Índice del curso Introducción Elementos del kit Programación con código RCX Programación con
Robótica con ladrillos LEGO José María Cañas Plaza jmplaza@gsyc.escet.urjc.es Abril 2003 Índice del curso 1 Índice del curso Introducción Elementos del kit Programación con código RCX Programación con
INTEGRANTES David Enríquez Francisco Ortiz
 DISEÑO Y CONSTRUCCIÓN DE UN MÓDULO DIDÁCTICO SVC CON HMI INCORPORADO MEDIANTE EL PROTOCOLO ETHERNET PARA EL LABORATORIO DE CONTROL ELÉCTRICO DE LA UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE EXTENSIÓN LATACUNGA
DISEÑO Y CONSTRUCCIÓN DE UN MÓDULO DIDÁCTICO SVC CON HMI INCORPORADO MEDIANTE EL PROTOCOLO ETHERNET PARA EL LABORATORIO DE CONTROL ELÉCTRICO DE LA UNIVERSIDAD DE LAS FUERZAS ARMADAS ESPE EXTENSIÓN LATACUNGA
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
Capítulo 1 Introducción.
 Capítulo 1 Introducción. 1.1 Introducción. La robótica móvil es un área de intensa investigación cuyo objetivo principal es el desarrollo de robots autónomos que puedan desenvolverse en ambientes dinámicos
Capítulo 1 Introducción. 1.1 Introducción. La robótica móvil es un área de intensa investigación cuyo objetivo principal es el desarrollo de robots autónomos que puedan desenvolverse en ambientes dinámicos
Educación de Punta en Ciencias y Tecnología para TODOS!
 Educación de Punta en Ciencias y Tecnología para TODOS! Creatividad y motivación del estudiante Conocimientos y Habilidades Ciencias básicas a través de la tecnología Organizaciones Gobierno Fuerzas Armadas
Educación de Punta en Ciencias y Tecnología para TODOS! Creatividad y motivación del estudiante Conocimientos y Habilidades Ciencias básicas a través de la tecnología Organizaciones Gobierno Fuerzas Armadas
Control de Corte. Catalogo Producto. Versión 1
 LOG12/CUT . 2 Control de Corte Catalogo Producto Los derechos de reproducción de este documento están reservados a Logimac Accionamientos y control S.A. Todos los derechos son estrictamente reservados.
LOG12/CUT . 2 Control de Corte Catalogo Producto Los derechos de reproducción de este documento están reservados a Logimac Accionamientos y control S.A. Todos los derechos son estrictamente reservados.
ROBOTICA FASE 3. TRABAJO COLABORATIVO 3 SOFTWARE DE SIMUALCION TUTOR: JOAN SEBASTIAN BUSTOS PRESENTADO POR: CARLOS FERNANDO PAVA AVILA
 ROBOTICA FASE 3. TRABAJO COLABORATIVO 3 SOFTWARE DE SIMUALCION TUTOR: JOAN SEBASTIAN BUSTOS PRESENTADO POR: CARLOS FERNANDO PAVA AVILA C.C. 1073.322.252 GRUPO: 17 UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
ROBOTICA FASE 3. TRABAJO COLABORATIVO 3 SOFTWARE DE SIMUALCION TUTOR: JOAN SEBASTIAN BUSTOS PRESENTADO POR: CARLOS FERNANDO PAVA AVILA C.C. 1073.322.252 GRUPO: 17 UNIVERSIDAD NACIONAL ABIERTA Y A DISTANCIA
Catálogo de venta. Kits de robótica My Robot Time MRT. Logix5 Smart Solutions LOGIX5 SMART SOLUTIONS
 Catálogo de venta Kits de robótica My Robot Time MRT Logix5 Smart Solutions 1 Dos líneas de productos Línea educativa: Kits orientados a cursos y talleres de robótica y programación, con manuales detallados
Catálogo de venta Kits de robótica My Robot Time MRT Logix5 Smart Solutions 1 Dos líneas de productos Línea educativa: Kits orientados a cursos y talleres de robótica y programación, con manuales detallados
Diseño de reguladores PID.
 Universidad Carlos III de Madrid Departamento de Ingeniería de Sistemas y Automática Área de Ingeniería de Sistemas y Automática SEÑALES Y SISTEMAS Práctica 3 Diseño de reguladores PID. 1 Introducción
Universidad Carlos III de Madrid Departamento de Ingeniería de Sistemas y Automática Área de Ingeniería de Sistemas y Automática SEÑALES Y SISTEMAS Práctica 3 Diseño de reguladores PID. 1 Introducción
Selección de un Robot Industrial. Prof. J. Milland
 Prof. J. Milland Si debemos robotizar un determinado proceso, debemos seleccionar el robot mas adecuado teniendo en consideración los servicios y el costo. Las características que debemos estar estudiando
Prof. J. Milland Si debemos robotizar un determinado proceso, debemos seleccionar el robot mas adecuado teniendo en consideración los servicios y el costo. Las características que debemos estar estudiando
Robótica Laboratorio de Robótica Curso (2º semestre)
") Laboratorio de Robótica Curso 2007-2008 (2º semestre) Universidad Autónoma de Madrid Escuela Politécnica Superior Índice 1. Presentación 2. Normas del laboratorio 3. Prácticas 4. GPBOT: Kit Básico de Robótica
Laboratorio de Robótica Curso 2007-2008 (2º semestre) Universidad Autónoma de Madrid Escuela Politécnica Superior Índice 1. Presentación 2. Normas del laboratorio 3. Prácticas 4. GPBOT: Kit Básico de Robótica
Actualmente la automatización de procesos mecánicos, es un ámbito en
 Capítulo 1 Introducción: 1.1 Marco Teórico Actualmente la automatización de procesos mecánicos, es un ámbito en crecimiento, esto ha dado origen a la Mecatrónica, una disciplina que se enfoca a generar
Capítulo 1 Introducción: 1.1 Marco Teórico Actualmente la automatización de procesos mecánicos, es un ámbito en crecimiento, esto ha dado origen a la Mecatrónica, una disciplina que se enfoca a generar
Configuración. Tipos de procesadores en la CPU
 Configuración Unidad de control (UC) o Arquitectura de las tarjetas o Arquitectura del sistema o Redundancia Sistemas de E/S Sistemas de Memoria masiva Tipos de procesadores en la CPU Varios procesadores
Configuración Unidad de control (UC) o Arquitectura de las tarjetas o Arquitectura del sistema o Redundancia Sistemas de E/S Sistemas de Memoria masiva Tipos de procesadores en la CPU Varios procesadores
CINEMÁTICA INVERSA DE ROBOTS INDUSTRIALES
 I EMETRE DE 00 CINEMÁTICA INVERA DE ROBOT INDUTRIALE GERMÁN ANDRÉ RAMO FUENTE * 1. Introducción El uso de robots en ambientes industriales, y más precisamente en procesos de manufactura, ha generado toda
I EMETRE DE 00 CINEMÁTICA INVERA DE ROBOT INDUTRIALE GERMÁN ANDRÉ RAMO FUENTE * 1. Introducción El uso de robots en ambientes industriales, y más precisamente en procesos de manufactura, ha generado toda
LA ROBOTICA MOVIL EN LA ESCUELA POLITECNICA NACIONAL Ing. Nelson G. Sotomayor O.
 LA ROBOTICA MOVIL EN LA ESCUELA POLITECNICA NACIONAL Ing. Nelson G. Sotomayor O. Hoy en día la robótica como disciplina ha crecido significativamente y existe una gran cantidad de robots, cada uno de estilo
LA ROBOTICA MOVIL EN LA ESCUELA POLITECNICA NACIONAL Ing. Nelson G. Sotomayor O. Hoy en día la robótica como disciplina ha crecido significativamente y existe una gran cantidad de robots, cada uno de estilo
Visual Display MD-105/115/116. Pantalla TFT color 7, 10.4 y 12.1
 Visual Display MD-105/115/116 Pantalla TFT color 7, 10.4 y 12.1 Más que una simple pantalla, una nueva forma de comunicación a un precio increible. abre una nueva vía de comunicación en lugares que hasta
Visual Display MD-105/115/116 Pantalla TFT color 7, 10.4 y 12.1 Más que una simple pantalla, una nueva forma de comunicación a un precio increible. abre una nueva vía de comunicación en lugares que hasta
Control cinemático y dinámico de robots omnidireccionales
 1 Diciembre 2013 Control cinemático y dinámico de robots omnidireccionales basado parcialmente en: Siegwart, Nourbakhsh y Scaramuzza, Introduction to Autonomous Mobile Robots Campion, et al., Structural
1 Diciembre 2013 Control cinemático y dinámico de robots omnidireccionales basado parcialmente en: Siegwart, Nourbakhsh y Scaramuzza, Introduction to Autonomous Mobile Robots Campion, et al., Structural
Tecnología robótica. Tema 7.- Tarjeta controladora Arduino
 1. Elementos electrónicos. 2. Placa Arduino. Sus componentes. 3. Software de Arduino. 4. Características de programación en Arduino. 5. Proyectos con la tarjeta controladora Arduino. 1. Elementos electrónicos.
1. Elementos electrónicos. 2. Placa Arduino. Sus componentes. 3. Software de Arduino. 4. Características de programación en Arduino. 5. Proyectos con la tarjeta controladora Arduino. 1. Elementos electrónicos.
GENSYS compact MAINS. GENSYS compact prime. soluciones para grupos eletrogenos. paralelo
 soluciones para grupos eletrogenos GENSYS compact MAINS Módulo compacto de y control para grupos electrógenos Esta nueva generación de controladores está optimizada para un uso sencillo.el nuevo GENSYS
soluciones para grupos eletrogenos GENSYS compact MAINS Módulo compacto de y control para grupos electrógenos Esta nueva generación de controladores está optimizada para un uso sencillo.el nuevo GENSYS
Arquitectura de un Controlador Electrónico de Procesos
 Arquitectura de un Controlador Electrónico de Procesos Unidad Central de Procesamiento (CPU) La unidad central de procesamiento es el elemento más importante de un controlador electrónico de procesos.
Arquitectura de un Controlador Electrónico de Procesos Unidad Central de Procesamiento (CPU) La unidad central de procesamiento es el elemento más importante de un controlador electrónico de procesos.
2015, Año del Generalísimo José María Morelos y Pavón
 Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
AUTOR: NELSON ALDAZ DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR MEDIANTE SOFTWARE LIBRE PARA EL MANIPULADOR SCORBOT-ER III DE 5 GRADOS DE LIBERTAD
 AUTOR: NELSON ALDAZ DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR MEDIANTE SOFTWARE LIBRE PARA EL MANIPULADOR SCORBOT-ER III DE 5 GRADOS DE LIBERTAD Latacunga, 2016 AGENDA Objetivo Marco Teórico Diseño e implementación
AUTOR: NELSON ALDAZ DISEÑO E IMPLEMENTACIÓN DE UN CONTROLADOR MEDIANTE SOFTWARE LIBRE PARA EL MANIPULADOR SCORBOT-ER III DE 5 GRADOS DE LIBERTAD Latacunga, 2016 AGENDA Objetivo Marco Teórico Diseño e implementación
TERMINAL DE PROGRAMACION VT-100. PARA CONTROLADORES BD1m y CD1pm
 TERMINAL DE PROGRAMACION VT-100 PARA CONTROLADORES BD1m y CD1pm PAGINA 1 I N D I C E CAPITULO 1: GENERALIDADES 3 1.1 : Descripción 3 Pag. CAPITULO 2: CARACTERISTICAS 3 2.1 : Especificaciones técnicas 3
TERMINAL DE PROGRAMACION VT-100 PARA CONTROLADORES BD1m y CD1pm PAGINA 1 I N D I C E CAPITULO 1: GENERALIDADES 3 1.1 : Descripción 3 Pag. CAPITULO 2: CARACTERISTICAS 3 2.1 : Especificaciones técnicas 3
Partes internas del CPU.
 Partes internas del CPU. DISCO DURO Es un dispositivo de almacenamiento de datos no volátil que emplea un sistema de grabación magnética para almacenar datos digitales. Se compone de uno o más platos o
Partes internas del CPU. DISCO DURO Es un dispositivo de almacenamiento de datos no volátil que emplea un sistema de grabación magnética para almacenar datos digitales. Se compone de uno o más platos o
Programar posiciones en un Micro Servo Tower Pro SG90 9G
 Programar posiciones en un Micro Servo Tower Pro SG90 9G (Recopilado de Internet. Revision Prof: Bolaños DJB) Versión: 12-04-18 Los servos son motores de corriente continua (CC), pero en lugar tener un
Programar posiciones en un Micro Servo Tower Pro SG90 9G (Recopilado de Internet. Revision Prof: Bolaños DJB) Versión: 12-04-18 Los servos son motores de corriente continua (CC), pero en lugar tener un
Robótica Mecanización, Automatización y Robotización Robótica y robots... 3
 Robótica... 2 Mecanización, Automatización y Robotización... 2 Robótica y robots... 3 Definiciones de robot... 3 Funcionamiento de un robot... 4 Entradas o Sensores... 5 Salidas o actuadores... 6 Realimentación...
Robótica... 2 Mecanización, Automatización y Robotización... 2 Robótica y robots... 3 Definiciones de robot... 3 Funcionamiento de un robot... 4 Entradas o Sensores... 5 Salidas o actuadores... 6 Realimentación...
TEMA 4: PROGRAMACIÓN DE ROBOTS
 Robótica TEMA 4: PROGRAMACIÓN DE ROBOTS Martin Mellado (martin@isa.upv.es) Departamento de Ingeniería de Sistemas y Automática (DISA) Facultad de Informática de Valencia (FIV) Universidad Politécnica de
Robótica TEMA 4: PROGRAMACIÓN DE ROBOTS Martin Mellado (martin@isa.upv.es) Departamento de Ingeniería de Sistemas y Automática (DISA) Facultad de Informática de Valencia (FIV) Universidad Politécnica de
Docencia en automática y robótica del área de Ingeniería de Sistemas y Automática de la Universidad de Almería
 Jornadas de trabajo DOCENWEB Alicante 2003 Docencia en automática y robótica del área de ngeniería de Sistemas y Automática de la Universidad de Almería Manolo Berenguel, José Luis Guzmán Francisco Rodríguez,
Jornadas de trabajo DOCENWEB Alicante 2003 Docencia en automática y robótica del área de ngeniería de Sistemas y Automática de la Universidad de Almería Manolo Berenguel, José Luis Guzmán Francisco Rodríguez,
MANUAL DE USUARIO Como utilizar un servo motor con Arduino REV. 1.0
 MANUAL DE USUARIO Como utilizar un servo motor con Arduino REV. 1.0 Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. +56 2 23339579 www.olimex.cl cursos.olimex.cl info@olimex.cl
MANUAL DE USUARIO Como utilizar un servo motor con Arduino REV. 1.0 Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. +56 2 23339579 www.olimex.cl cursos.olimex.cl info@olimex.cl
Clasificación de robots. Clasificación de robots. Universidad Autónoma de Guerrero Unidad Académica de Ingeniería
 Clasificación de robots Introducción a la robótica Sesión 2: Locomoción Eric Rodríguez Peralta En la actualidad los más comunes son: Robots manipuladores Limitación para moverse en su entorno Robots móviles
Clasificación de robots Introducción a la robótica Sesión 2: Locomoción Eric Rodríguez Peralta En la actualidad los más comunes son: Robots manipuladores Limitación para moverse en su entorno Robots móviles
TEMA 16 (1) INTERFACES ENTRE SENSORES Y PROCESADORES DIGITALES
 INTERFACES ENTRE SENSORES Y PROCESADORES DIGITALES") SENSORES Y ACONDICIONADORES TEMA 16 (1) INTERFACES ENTRE SENSORES Y PROCESADORES DIGITALES CONCEPTOS GENERALES E INTERFACES LOCALES Profesores: Enrique Mandado Pérez Antonio Murillo Roldan Tema 16-1 CONCEPTOS
SENSORES Y ACONDICIONADORES TEMA 16 (1) INTERFACES ENTRE SENSORES Y PROCESADORES DIGITALES CONCEPTOS GENERALES E INTERFACES LOCALES Profesores: Enrique Mandado Pérez Antonio Murillo Roldan Tema 16-1 CONCEPTOS
Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA. Unidad 1.- Morfología del robot. 1.2 Estructura mecánica de los robots.
 SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1.- Morfología del robot 1.2 Estructura
SECRETARÍA DE EDUCACIÓN PÚBLICA TECNOLÓGICA NACIONAL DE MÉXICO INSTITUTIO TECNOLÓGICO DE VERACRUZ Robótica Dr. José Antonio Garrido Natarén INGENIERÍA MECATRÓNICA Unidad 1.- Morfología del robot 1.2 Estructura
Cinemática del Robot. UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides
 UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Se interesa por la
UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La cinemática del robot estudia el movimiento del mismo con respecto a un sistema de referencia. Se interesa por la