Práctica 7. Control de articulaciones de modelos de Robots. FRO
|
|
|
- José Luis Camacho Río
- hace 5 años
- Vistas:
Transcripción
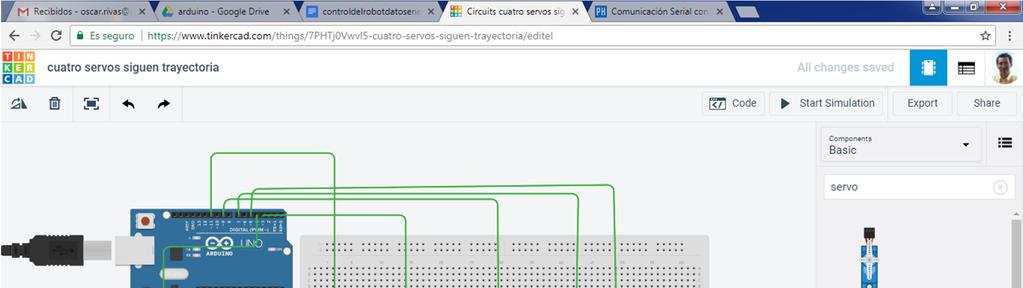
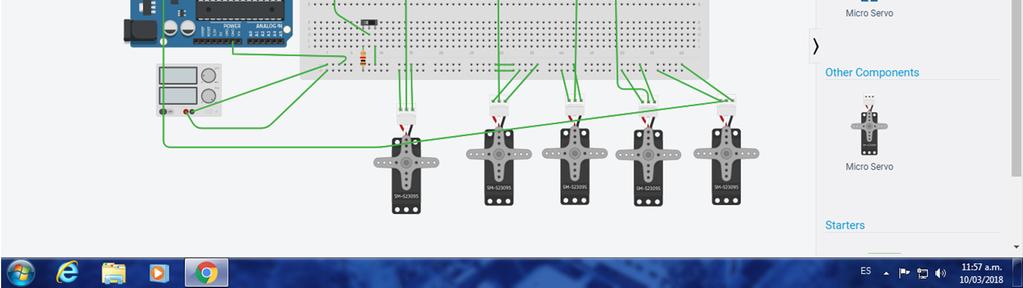
1 Práctica 7. Control de articulaciones de modelos de Robots. FRO Objetivos: Corroborar la cinemática directa de un robot Familiarizarse con la etapa del control de los actuadores de un robot a escala Materiales 1 brazo robot a escala 1 arduino 1 1 PC con IDE de arduino 1 Cable para arduino 1 Fuente de poder variable de 1 amperio 1 Breadboard 2 resistencia de 1k 4 potenciómetros de 10 k Conectores Procedimiento: 1. Cargue y corra el programa 1 (control por medio de potenciómetros), verifique el efecto que produce la variación de los potenciómetros. 2. Anote cuál es la posición de extremo del robot cuando las articulaciones tienen 0 grados 3. Anote cuál es la posición de extremo del robot cuando las articulaciones tienen 90 grados 4. Cargue y corra el programa 2 (control por medio de datos del monitor serial) 5. Llene la siguiente tabla midiendo la posición y la orientación del extremo del robot (en la tabla se pueden utilizar otros valores de q si fuera necesario) No. q1 q2 q3 q4 x y z Teta Compare los datos obtenidos con los valores que resultan del análisis con el modelo cinemático directo de ese robot (obtener el modelo cinemático directo si es necesario) 7. Cargue y corra el programa 3 (control del robot datos en el código) 8. Describa lo que realiza el programa 9. Cargue y corra el programa 4 (control robot desde matlab 2018) 10. Corra desde matlab el programa paarduino.m 11. Describa lo que realiza el programa
2 Programa 1: Control por medio de potenciómetros. /* Aplicacion que mueve cuatro Servos (articulaciones) a la posicion indicada por los potenciometros y manda la lectura en grados al monitor serial */ #include <Servo.h> //incluimos una biblioteca de funciones para manejar Servomotores // se declaran variables que identifican los pines de salida para los servos int pinservo1 = 9; //llamamos pinservo1 al pin 9 int pinservo2 = 7; //llamamos pinservo2 al pin 7 int pinservo3 = 5; //llamamos pinservo3 al pin 5 int pinservo4 = 4; //llamamos pinservo4 al pin 4 // se declara los pines de entradas analógicas int pinpot1 = 0; //llamamos pinpot1 al pin 0 int pinpot2 = 1; //llamamos pinpot2 al pin 1 int pinpot3 = 2; //llamamos pinpot3 al pin 2 int pinpot4 = 3; //llamamos pinpot4 al pin 3 // se declaran los objetos tipo servo, uno para cada servo a utilizar Servo miservo1; //Creamos un elemento Servo en el sistema Servo miservo2; //Creamos un elemento Servo en el sistema Servo miservo3; //Creamos un elemento Servo en el sistema Servo miservo4; //Creamos un elemento Servo en el sistema
3 void setup() // se indica el pin de salida de cada servo vinculandolo con el objeto servo miservo1.attach(pinservo1); //Indicamos que el servo esta conectado a pinservo miservo2.attach(pinservo2); //Indicamos que el servo esta conectado a pinservo miservo3.attach(pinservo3); //Indicamos que el servo esta conectado a pinservo miservo4.attach(pinservo4); //Indicamos que el servo esta conectado a pinservo // velocidad de transmision de datos por monitor serial Serial.begin(9600); //Funcion bucle de Arduino. Corazon del programa void loop() // se declaran las variables de salida de los ADC datos de 0 a 1023 int valorpot1 = 0; int valorpot2 = 0; int valorpot3 = 0; int valorpot4 = 0; // se declaran las variables de angulos, rango 0 a 179 grados int valorservo1 = 0; int valorservo2 = 0;
4 int valorservo3 = 0; int valorservo4 = 0; valorpot1 = analogread(pinpot1); //leemos el valor del potenciometro valorservo1 = map(valorpot1, 0, 1023, 0, 179); //convertimos ese valor a grados miservo1.write(valorservo1); hemos calculado //movemos el servo a la posicion que valorpot2 = analogread(pinpot2); //leemos el valor del potenciometro valorservo2 = map(valorpot2, 0, 1023, 0, 179); //convertimos ese valor a grados miservo2.write(valorservo2); hemos calculado //movemos el servo a la posicion que valorpot3 = analogread(pinpot3); //leemos el valor del potenciometro valorservo3 = map(valorpot3, 0, 1023, 0, 179); //convertimos ese valor a grados miservo3.write(valorservo3); hemos calculado //movemos el servo a la posicion que valorpot4 = analogread(pinpot4); //leemos el valor del potenciometro valorservo4 = map(valorpot4, 0, 1023, 0, 179); //convertimos ese valor a grados miservo4.write(valorservo4); hemos calculado //movemos el servo a la posicion que // se escriben datos en monitor serial Serial.print("q1="); Serial.println(valorServo1); Serial.print("q2="); Serial.println(valorServo2); Serial.print("q3="); Serial.println(valorServo3); Serial.print("q4=");
;")

5 Serial.println(valorServo4); Serial.println(" "); // retardo de tiempo para leer datos comodamente delay(100);
6 Programa 2: Control por medio de datos del monitor serial. /* Aplicacion que mueve cuatro Servos (articulaciones) conforme lo que se escribe en el monitor serial */ #include <Servo.h> //incluimos una biblioteca de funciones para manejar Servomotores // se declaran variables que identifican los pines de salida para los servos int pinservo1 = 9; //llamamos pinservo1 al pin 9 int pinservo2 = 7; //llamamos pinservo2 al pin 7 int pinservo3 = 5; //llamamos pinservo3 al pin 5 int pinservo4 = 4; //llamamos pinservo4 al pin 4 // se declaran los objetos tipo servo, uno para cada servo a utilizar Servo miservo1; //Creamos un elemento Servo en el sistema Servo miservo2; //Creamos un elemento Servo en el sistema Servo miservo3; //Creamos un elemento Servo en el sistema Servo miservo4; //Creamos un elemento Servo en el sistema // se declaran las variables de angulos, rango 0 a 179 grados int valorservo1 = 0; int valorservo2 = 0; int valorservo3 = 0; int valorservo4 = 0;
7 int input1=0; int input2=0; int input3=0; void setup() // se indica el pin de salida de cada servo vinculandolo con el objeto servo miservo1.attach(pinservo1); //Indicamos que el servo esta conectado a pinservo miservo2.attach(pinservo2); //Indicamos que el servo esta conectado a pinservo miservo3.attach(pinservo3); //Indicamos que el servo esta conectado a pinservo miservo4.attach(pinservo4); //Indicamos que el servo esta conectado a pinservo // velocidad de transmision de datos por monitor serial Serial.begin(9600); //Funcion bucle de Arduino. Corazon del programa void loop() // se introducen datos en monitor serial Serial.println("introduzca nuevo q1"); delay(5000);
8 if (Serial.available()>0) valorservo1=serial.parseint(); Serial.print("q1="); Serial.println(valorServo1); Serial.println("introduzca nuevo q2"); delay(5000); if (Serial.available()>0) valorservo2=serial.parseint(); Serial.print("q2="); Serial.println(valorServo2); Serial.println("introduzca nuevo q3"); delay(5000); if (Serial.available()>0) valorservo3=serial.parseint(); Serial.print("q3="); Serial.println(valorServo3); Serial.println("introduzca nuevo q4"); delay(5000); if (Serial.available()>0) valorservo4=serial.parseint();
9 Serial.print("q4="); Serial.println(valorServo4); Serial.println(" "); // Se mandan los datos a los servos miservo1.write(valorservo1); hemos calculado //movemos el servo a la posicion que miservo2.write(valorservo2); hemos calculado //movemos el servo a la posicion que miservo3.write(valorservo3); hemos calculado //movemos el servo a la posicion que miservo4.write(valorservo4); hemos calculado //movemos el servo a la posicion que // se presentan datos en monitor serial Serial.print("q1="); Serial.println(valorServo1); Serial.print("q2="); Serial.println(valorServo2); Serial.print("q3="); Serial.println(valorServo3); Serial.print("q4=");
;")

10 Serial.println(valorServo4); Serial.println(" "); // retardo de tiempo para leer datos comodamente delay(100);
11 Programa 3: Control del robot datos en el código. /* código Aplicacion que permite el movimiento del robot entre tres puntos, la trayectoria de los servos está en el */ #include <Servo.h> // Incluimos la biblioteca de funciones "Servo", para manejar //Servomotores // se declaran variables que identifican los pines de salida para los servos int pinservo1 = 9; // llamamos pinservo1 al pin 9 int pinservo2 = 7; // llamamos pinservo2 al pin 7 int pinservo3 = 5; // llamamos pinservo3 al pin 5 int pinservo4 = 4; // llamamos pinservo4 al pin 4 int pinservo5 = 3; // llamamos pinservo5 al pin 3 // se declara el pin de entrada para habilitar movimiento int habil=11; // se declaran arreglos con los datos de los angulos a los que se moveran los servos int q1[18]=0,20,40,59,56,53,49,48,48,47,47,46,46,46,45,45,45,45; int q2[18]=90,101,112,124,126,127,129,126,124,121,113,107,101,90,85,79,74,67; int q3[18]=90,70,40,10,3,0,0,0,0,0,0,0,0,10,20,30,40,45; int q4[18]=93,101,110,119,119,118,118,116,114,112,108,104,100,95,85,80,75,72; // se declaran los objetos tipo servo, uno para cada servo a utilizar
12 Servo miservo1; // Creamos un elemento Servo en el sistema Servo miservo2; // Creamos un elemento Servo en el sistema Servo miservo3; // Creamos un elemento Servo en el sistema Servo miservo4; // Creamos un elemento Servo en el sistema Servo miservo5; // Creamos un elemento Servo en el sistema void setup() // se indica el pin de salida de cada servo vinculandolo con el objeto servo miservo1.attach(pinservo1); // Indicamos que el servomotor esta conectado al pinservo miservo2.attach(pinservo2); // Indicamos que el servomotor esta conectado al pinservo miservo3.attach(pinservo3); // Indicamos que el servomotor esta conectado al pinservo miservo4.attach(pinservo4); // Indicamos que el servomotor esta conectado al pinservo miservo5.attach(pinservo5); // Indicamos que el servomotor esta conectado al pinservo // se indica que la variable habil es una entrada pinmode(habil,input); Serial.begin(9600); void loop() if (digitalread(habil) == 1) // hay movimiento si la entrada está a 5v (el movimiento se repite // continuamente por eso al finalizar el movimiento hay que deshabilitar)
13 miservo5.write(180); // se abre la pinza delay(2000); for (int i=0; i<6; i++) // lazo para el movimiento de los servos hacia el punto 1 miservo1.write(q1[i]); //movemos el servo1 miservo2.write(q2[i]); //movemos el servo2 miservo3.write(q3[i]); //movemos el servo3 miservo4.write(q4[i]); //movemos el servo4 Serial.print("q1="); Serial.println(q1[i]); miservo5.write(0); // se cierra la pinza
14 delay(2000); for (int i=6; i<12; i++) // lazo para el movimiento de los servos hacia el punto 2 miservo1.write(q1[i]); //movemos el servo1 miservo2.write(q2[i]); //movemos el servo2 miservo3.write(q3[i]); //movemos el servo3 miservo4.write(q4[i]); //movemos el servo4 Serial.print("q1="); Serial.println(q1[i]); miservo5.write(180); // se abre la pinza delay(2000); for (int i=12; i<18; i++) // lazo para el movimiento de los servos hacia home
15 miservo1.write(q1[i]); //movemos el servo1 miservo2.write(q2[i]); //movemos el servo2 miservo3.write(q3[i]); //movemos el servo3 miservo4.write(q4[i]); //movemos el servo4 Serial.print("q1="); Serial.println(q1[i]); miservo5.write(0); // se cierra la pinza delay(2000); if (digitalread(habil) == 0) // el movimiento está inhabilitado miservo1.write(q1[5]); miservo2.write(q2[5]); miservo3.write(q3[5]); miservo4.write(180);
16
17 Programa 4: Control robot desde matlab /* Aplicacion que permite el movimiento del robot entre tres puntos, la trayectoria de los servos es mandada através de puerto serial desde matlab */ #include <Servo.h> // Incluimos la biblioteca de funciones "Servo", para manejar //Servomotores // se declaran variables que identifican los pines de salida para los servos int pinservo1 = 9; // llamamos pinservo1 al pin 9 int pinservo2 = 7; // llamamos pinservo2 al pin 7 int pinservo3 = 5; // llamamos pinservo3 al pin 5 int pinservo4 = 4; // llamamos pinservo4 al pin 4 int pinservo5 = 3; // llamamos pinservo5 al pin 3 // se declara el pin de entrada para habilitar movimiento int habil=11; // se declaran arreglos con los datos de los angulos a los que se moveran los servos int q1[18]=90,90,90,90,90,90,90,90,90,90,90,90,90,90,90,90,90,90; int q2[18]=90,90,90,90,90,90,90,90,90,90,90,90,90,90,90,90,90,90; int q3[18]=90,90,90,90,90,90,90,90,90,90,90,90,90,90,90,90,90,90; int q4[18]=90,90,90,90,90,90,90,90,90,90,90,90,90,90,90,90,90,90; // se declaran los objetos tipo servo, uno para cada servo a utilizar
18 Servo miservo1; // Creamos un elemento Servo en el sistema Servo miservo2; // Creamos un elemento Servo en el sistema Servo miservo3; // Creamos un elemento Servo en el sistema Servo miservo4; // Creamos un elemento Servo en el sistema Servo miservo5; // Creamos un elemento Servo en el sistema void setup() // se indica el pin de salida de cada servo vinculandolo con el objeto servo miservo1.attach(pinservo1); // Indicamos que el servomotor esta conectado al pinservo miservo2.attach(pinservo2); // Indicamos que el servomotor esta conectado al pinservo miservo3.attach(pinservo3); // Indicamos que el servomotor esta conectado al pinservo miservo4.attach(pinservo4); // Indicamos que el servomotor esta conectado al pinservo miservo5.attach(pinservo5); // Indicamos que el servomotor esta conectado al pinservo // se indica que la variable habil es una entrada pinmode(habil,input); Serial.begin(9600); void loop() if (digitalread(habil) == 1) // hay movimiento si la entrada está a 5v (el movimiento se repite // continuamente por eso al finalizar el movimiento hay que deshabilitar)
19 if (Serial.available()>0) for (int i=0; i<18; i++) q1[i]=serial.parseint(); for (int i=0; i<18; i++) q2[i]=serial.parseint(); for (int i=0; i<18; i++) q3[i]=serial.parseint(); for (int i=0; i<18; i++) q4[i]=serial.parseint(); miservo5.write(180); // se abre la pinza delay(2000); for (int i=0; i<6; i++) // lazo para el movimiento de los servos hacia el punto 1
20 miservo1.write(q1[i]); //movemos el servo1 miservo2.write(q2[i]); //movemos el servo2 miservo3.write(q3[i]); //movemos el servo3 miservo4.write(q4[i]); //movemos el servo4 Serial.print("q1="); Serial.println(q1[i]); miservo5.write(0); // se cierra la pinza delay(2000); for (int i=6; i<12; i++) // lazo para el movimiento de los servos hacia el punto 2 miservo1.write(q1[i]); //movemos el servo1 miservo2.write(q2[i]); //movemos el servo2
21 miservo3.write(q3[i]); //movemos el servo3 miservo4.write(q4[i]); //movemos el servo4 Serial.print("q1="); Serial.println(q1[i]); miservo5.write(180); // se abre la pinza delay(2000); for (int i=12; i<18; i++) // lazo para el movimiento de los servos hacia home miservo1.write(q1[i]); //movemos el servo1 miservo2.write(q2[i]); //movemos el servo2 miservo3.write(q3[i]); //movemos el servo3 miservo4.write(q4[i]); //movemos el servo4 Serial.print("q1=");
22 Serial.println(q1[i]); miservo5.write(0); // se cierra la pinza delay(2000); if (digitalread(habil) == 0) // el movimiento está inhabilitado miservo1.write(q1[5]); miservo2.write(q2[5]); miservo3.write(q3[5]); miservo4.write(180);
Actuadores eléctricos - Motores
 Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
CONTROL DE UN SERVOMOTOR
 CONTROL DE UN SERVOMOTOR MATERIAL NECESARIO 1 potenciómetro 1 servomotor 2 condensadores de 100 µf 1 brazo motor Cables, placa de montajes 1 placa Arduino Descripción del proyecto Usamos un servomotor
CONTROL DE UN SERVOMOTOR MATERIAL NECESARIO 1 potenciómetro 1 servomotor 2 condensadores de 100 µf 1 brazo motor Cables, placa de montajes 1 placa Arduino Descripción del proyecto Usamos un servomotor
Conceptos básicos de Arduino:
 Conceptos básicos de Arduino: Cosas básicas de C: Siempre que se acabe de escribir una línea, y esta no acabe en }, hay que poner punto y coma (;) 1. Variables: 2. Cómo declarar una variable: a. Se pueden
Conceptos básicos de Arduino: Cosas básicas de C: Siempre que se acabe de escribir una línea, y esta no acabe en }, hay que poner punto y coma (;) 1. Variables: 2. Cómo declarar una variable: a. Se pueden
Introducción. Que es Arduino? 1. Por qué Arduino? 2. Asequible
 Básicos 1 Introducción Que es Arduino? 1 Arduino es una herramienta para hacer que los ordenadores puedan sentir y controlar el mundo físico a través de tu ordenador personal. Es una plataforma de desarrollo
Básicos 1 Introducción Que es Arduino? 1 Arduino es una herramienta para hacer que los ordenadores puedan sentir y controlar el mundo físico a través de tu ordenador personal. Es una plataforma de desarrollo
4 Actuadores eléctricos. Alfaomega. Material Web. Arduino control de servomotores a pasos 2
 4 Actuadores eléctricos Capítulo Material Web Arduino control de servomotores a pasos 2 2 Actuadores eléctricos 4.1. 4.1 Arduino control de servomotores a pasos Un servomotor de pasos es un sistema formado
4 Actuadores eléctricos Capítulo Material Web Arduino control de servomotores a pasos 2 2 Actuadores eléctricos 4.1. 4.1 Arduino control de servomotores a pasos Un servomotor de pasos es un sistema formado
Control de movimientos y rutinas para Mini Brazo Robótico por Bluetooth. (Compatible solo con dispositivos Android)
") Control de movimientos y rutinas para Mini Brazo Robótico por Bluetooth (Compatible solo con dispositivos Android) Objetivo General. Desarrollar un programa que permita controlar movimientos del mini brazo
Control de movimientos y rutinas para Mini Brazo Robótico por Bluetooth (Compatible solo con dispositivos Android) Objetivo General. Desarrollar un programa que permita controlar movimientos del mini brazo
Programar posiciones en un Micro Servo Tower Pro SG90 9G
 Programar posiciones en un Micro Servo Tower Pro SG90 9G (Recopilado de Internet. Revision Prof: Bolaños DJB) Versión: 12-04-18 Los servos son motores de corriente continua (CC), pero en lugar tener un
Programar posiciones en un Micro Servo Tower Pro SG90 9G (Recopilado de Internet. Revision Prof: Bolaños DJB) Versión: 12-04-18 Los servos son motores de corriente continua (CC), pero en lugar tener un
EducaBot. Sensores 3º parte.
 CURSO PROVINCIAL: CONTROL Y ROBÓTICA EN TECNOLOGÍA ROBÓTICA EDUCATIVA EducaBot. Sensores 3º parte. Manuel Hidalgo Díaz Noviembre 2009 Sensores de contacto. Bumper. Los sensores de contactos son los dispositivos
CURSO PROVINCIAL: CONTROL Y ROBÓTICA EN TECNOLOGÍA ROBÓTICA EDUCATIVA EducaBot. Sensores 3º parte. Manuel Hidalgo Díaz Noviembre 2009 Sensores de contacto. Bumper. Los sensores de contactos son los dispositivos
LED INTERMITENTE CIRCUITO ELÉCTRICO MATERIALES PROGRAMA LED DOS CONECTORES CABLE USB ROBÓTICA. Puerto 8 ( salida al led rojo ) ARDUINO UNO 220 W GND
 ARDUINO UNO 220 W GND") INTERMITENTE ROBÓTICA CIRCUITO ELÉCTRICO Puerto 8 ( salida al led rojo ) 8 ARDUINO UNO GND ROJO MATERIALES ARDUINO UNO PROTOBOARD ROJO DOS CONECTORES CABLE USB PROGRAMA void setup ( ) { pinmode ( 8, OUTPUT
INTERMITENTE ROBÓTICA CIRCUITO ELÉCTRICO Puerto 8 ( salida al led rojo ) 8 ARDUINO UNO GND ROJO MATERIALES ARDUINO UNO PROTOBOARD ROJO DOS CONECTORES CABLE USB PROGRAMA void setup ( ) { pinmode ( 8, OUTPUT
Taller de electrónica creativa. Cocinando con Arduino
 : Cocinando con Arduino 12, 13, 14-19, 20 y 21 de Junio de 2009 Yago Torroja Igor González Angela Ramos y colaboradores 1 ANEXOS II Si te da tiempo y quieres seguir cocinando, aquí tienes unas recetas
: Cocinando con Arduino 12, 13, 14-19, 20 y 21 de Junio de 2009 Yago Torroja Igor González Angela Ramos y colaboradores 1 ANEXOS II Si te da tiempo y quieres seguir cocinando, aquí tienes unas recetas
SERVOMOTORES. Para usar la librería del servomotor primero tiene que importarla. Esto añade nuevas funciones al sketch desde la librería.
 SERVOMOTORES Los servomotores son un tipo especial de motores que no giran continuamente sino que se mueven a una posición específica y permanecen en ella hasta que se ordene que se muevan de nuevo. Los
SERVOMOTORES Los servomotores son un tipo especial de motores que no giran continuamente sino que se mueven a una posición específica y permanecen en ella hasta que se ordene que se muevan de nuevo. Los
I.E.S. PADRE MANJÓN DPTO. TECNOLOGÍA-INFORMÁTICA 2017/2018 BRAZO ROBOT ARDUINO
 I.E.S. PADRE MANJÓN DPTO. TECNOLOGÍA-INFORMÁTICA 2017/2018 BRAZO ROBOT ARDUINO PROYECTO ROBOT Contenido MATERIAL Y MONTAJE.... 2 MOTOR MG996R... 6 CALIBRACIÓN DE SERVOS:... 6 ALIMENTACIÓN DE 5 SERVOS:...
I.E.S. PADRE MANJÓN DPTO. TECNOLOGÍA-INFORMÁTICA 2017/2018 BRAZO ROBOT ARDUINO PROYECTO ROBOT Contenido MATERIAL Y MONTAJE.... 2 MOTOR MG996R... 6 CALIBRACIÓN DE SERVOS:... 6 ALIMENTACIÓN DE 5 SERVOS:...
PRESENTA INTRODUCCIÓN A ARDUINO
 PRESENTA INTRODUCCIÓN A ARDUINO #1: ALGORITMOS Y PSEUDOCÓDIGO, BLINK #2: ENTRADA y SALIDAS ANALOGAS / DIGITALES #3: SERVOMOTOR + DESAFIO #1 Qué es Arduino? Tips Generales Hasta dónde se puede llegar?
PRESENTA INTRODUCCIÓN A ARDUINO #1: ALGORITMOS Y PSEUDOCÓDIGO, BLINK #2: ENTRADA y SALIDAS ANALOGAS / DIGITALES #3: SERVOMOTOR + DESAFIO #1 Qué es Arduino? Tips Generales Hasta dónde se puede llegar?
Sensor Analógico: LDR. Componentes. Conexionado Lectura del nivel de Luz. Libro de Actividades de Robótica Educativa
 1.2.17. Sensor Analógico: LDR En este apartado vamos a realizar dos actividades en donde utilizaremos un sensor de luz visible o LDR. Este tipo de sensores son analógicos, nos dan una medida de intensidad
1.2.17. Sensor Analógico: LDR En este apartado vamos a realizar dos actividades en donde utilizaremos un sensor de luz visible o LDR. Este tipo de sensores son analógicos, nos dan una medida de intensidad
GUIA DE EJERCICIOS Nº 3 INSTRUMENTACIÓN AVANZADA
 GUIA DE EJERCICIOS Nº 3 INSTRUMENTACIÓN AVANZADA Comunicando LabVIEW a una placa ARDUINO 1 3.-COMUNICANDO LABVIEW A UNA PLACA ARDUINO El objetivo de esta guía es programar la placa ARDUINO para que se
GUIA DE EJERCICIOS Nº 3 INSTRUMENTACIÓN AVANZADA Comunicando LabVIEW a una placa ARDUINO 1 3.-COMUNICANDO LABVIEW A UNA PLACA ARDUINO El objetivo de esta guía es programar la placa ARDUINO para que se
Entradas Analógicas.
 CURSO PROVINCIAL: INTRODUCCIÓN A LA ROBÓTICA CON ARDUINO ROBÓTICA EDUCATIVA Entradas Analógicas. Manuel Hidalgo Díaz Enero 2011 Entradas analógicas. El controlador Atmega de Arduino lleva incluido un conversor
CURSO PROVINCIAL: INTRODUCCIÓN A LA ROBÓTICA CON ARDUINO ROBÓTICA EDUCATIVA Entradas Analógicas. Manuel Hidalgo Díaz Enero 2011 Entradas analógicas. El controlador Atmega de Arduino lleva incluido un conversor
EL SENSOR DE SONIDO KY-038 (VERSION )
") EL SENSOR DE SONIDO KY-038 (VERSION 27-8-17) OBJETIVOS Presentar el sensor de sonido KY-038. Utilizar el pin digital D0 del sensor. Mostrar las lecturas del sensor utilizando el pin analógico A0 del sensor.
EL SENSOR DE SONIDO KY-038 (VERSION 27-8-17) OBJETIVOS Presentar el sensor de sonido KY-038. Utilizar el pin digital D0 del sensor. Mostrar las lecturas del sensor utilizando el pin analógico A0 del sensor.
Instalación y entorno de programación
 Instalación y entorno de programación Miguel Ángel Asensio Hernández, Profesor de Electrónica de Comunicaciones. Departamento de Electrónica, I.E.S. Emérita Augusta. 06800 MÉRIDA. Pagina oficial de Arduino:
Instalación y entorno de programación Miguel Ángel Asensio Hernández, Profesor de Electrónica de Comunicaciones. Departamento de Electrónica, I.E.S. Emérita Augusta. 06800 MÉRIDA. Pagina oficial de Arduino:
Taller Introducción a la Ingeniería Eléctrica Robot y comunicaciones basados en Microcontrolador Arduino
 Taller Introducción a la Ingeniería Eléctrica Robot y comunicaciones basados en Microcontrolador Arduino Instituto de Ingeniería Eléctrica Taller 8: Matrices 31 de mayo de 2017 IIE (TallerInE) Taller Introducción
Taller Introducción a la Ingeniería Eléctrica Robot y comunicaciones basados en Microcontrolador Arduino Instituto de Ingeniería Eléctrica Taller 8: Matrices 31 de mayo de 2017 IIE (TallerInE) Taller Introducción
Clase 4: Motores. Conviértete en un Joven Inventor PENTA UC
 Clase 4: Conviértete en un Joven Inventor PENTA UC 2014-1 Contenidos Tipos de motores y para que sirven Motor DC Qué es un electroimán? Funcionamiento PWM Sentido de giro L293 Motor Servo Características
Clase 4: Conviértete en un Joven Inventor PENTA UC 2014-1 Contenidos Tipos de motores y para que sirven Motor DC Qué es un electroimán? Funcionamiento PWM Sentido de giro L293 Motor Servo Características
Bach. Pablo Sanabria Campos. Programa de Tecnologías Educativas Avanzadas
 Bach. Pablo Sanabria Campos Programa de Tecnologías Educativas Avanzadas Agenda Arduino. Entradas y salidas. IDE Arduino (instalación y configuración). Programación. Ejemplos. Proyecto. Arduino Es una
Bach. Pablo Sanabria Campos Programa de Tecnologías Educativas Avanzadas Agenda Arduino. Entradas y salidas. IDE Arduino (instalación y configuración). Programación. Ejemplos. Proyecto. Arduino Es una
TPR 3ºESO. Departamento de Tecnología. IES Nuestra Señora de la Almudena Mª Jesús Saiz TEMA 6: ROBÓTICA
 TEMA 6: ROBÓTICA La robótica es la rama de la tecnología que se dedica al diseño y construcción de robots, Un robot es una máquina formada por sensores y actuadores controlados por un ordenador y programada
TEMA 6: ROBÓTICA La robótica es la rama de la tecnología que se dedica al diseño y construcción de robots, Un robot es una máquina formada por sensores y actuadores controlados por un ordenador y programada
TPR 3ºESO. Departamento de Tecnología. IES Nuestra Señora de la Almudena Mª Jesús Saiz TEMA 5: ROBÓTICA
 TEMA 5: ROBÓTICA La robótica es la rama de la tecnología que se dedica al diseño y construcción de robots, Un robot es una máquina formada por sensores y actuadores controlados por un ordenador y programada
TEMA 5: ROBÓTICA La robótica es la rama de la tecnología que se dedica al diseño y construcción de robots, Un robot es una máquina formada por sensores y actuadores controlados por un ordenador y programada
Empieza con // y termina con la siguiente línea de código. Son ignorados por el programa y no ocupan espacio en memoria.
 /* */ Los bloques de comentarios o comentarios multilíneas son áreas de texto ignoradas por el programa y se usan para describir códigos o comentarios que ayudan a otras personas a entender parte del programa.
/* */ Los bloques de comentarios o comentarios multilíneas son áreas de texto ignoradas por el programa y se usan para describir códigos o comentarios que ayudan a otras personas a entender parte del programa.
Aprende a construir y programar un robot interactivo utilizando los componentes del Maker Control Kit y el Maker Kit 3.
 PROYECTO Nº 1: Robot interactivo Aprende a construir y programar un robot interactivo utilizando los componentes del Maker Control Kit y el Maker Kit 3. Utiliza el servomotor, el sensor de distancia y
PROYECTO Nº 1: Robot interactivo Aprende a construir y programar un robot interactivo utilizando los componentes del Maker Control Kit y el Maker Kit 3. Utiliza el servomotor, el sensor de distancia y
CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO
 CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO 1 Nombre, apellidos y correo electrónico de EducaMadrid del participante JAVIER MARTÍN DE LUCAS javier.martindelucas@educa.madrid.org JUAN CARLOS NIÑO SÁINZ-MAZA
CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO 1 Nombre, apellidos y correo electrónico de EducaMadrid del participante JAVIER MARTÍN DE LUCAS javier.martindelucas@educa.madrid.org JUAN CARLOS NIÑO SÁINZ-MAZA
TEMA 7: ROBÓTICA -PROGRAMACIÓN
 1. Control de un robot: TEMA 7: ROBÓTICA -PROGRAMACIÓN Los robots se controlan mediante circuitos electrónicos analógicos y digitales, y programación mediante ordenador. La electrónica se divide en dos
1. Control de un robot: TEMA 7: ROBÓTICA -PROGRAMACIÓN Los robots se controlan mediante circuitos electrónicos analógicos y digitales, y programación mediante ordenador. La electrónica se divide en dos
Dpto. Tecnología Colegio Colón
 Dpto. Tecnología Colegio Colón Álvaro Salas Alumno: ÍNDICE DE PRÁCTICAS PRIMERA PARTE Practica 01. Practica 01. Variante: Led intermitente. Encender un LED cambiando su intensidad usando PWM. Practica
Dpto. Tecnología Colegio Colón Álvaro Salas Alumno: ÍNDICE DE PRÁCTICAS PRIMERA PARTE Practica 01. Practica 01. Variante: Led intermitente. Encender un LED cambiando su intensidad usando PWM. Practica
Movimiento de servos de rotación continua (Ref libro 1 pg 105)
") 1.2.8. Movimiento de servos de rotación continua (Ref libro 1 pg 105) Esta actividad va a introducirnos en el uso de motores con nuestra placa. Los primeros motores que vamos a utilizar son servos de rotación
1.2.8. Movimiento de servos de rotación continua (Ref libro 1 pg 105) Esta actividad va a introducirnos en el uso de motores con nuestra placa. Los primeros motores que vamos a utilizar son servos de rotación
La ventana de mblock se compone de 5 partes principalmente:
 Programación Visual con mbloc mblock es un entorno gráfico de programación basado en el editor Scratch 2.0 para introducir de forma sencilla la programación y robótica. El entorno de programación de mblock
Programación Visual con mbloc mblock es un entorno gráfico de programación basado en el editor Scratch 2.0 para introducir de forma sencilla la programación y robótica. El entorno de programación de mblock
Sesión 3 (Práctica) Sensores Actuadores
 Sensores Actuadores") Sesión 3 (Práctica) Sensores Actuadores Índice 1. Sensores a. Infrarrojos b. Ultrasonidos 2. Actuadores a. Servomotor b. Motores 3. Comunicación a. Infrarrojos (mando a distancia) a. Control de actuadores
Sesión 3 (Práctica) Sensores Actuadores Índice 1. Sensores a. Infrarrojos b. Ultrasonidos 2. Actuadores a. Servomotor b. Motores 3. Comunicación a. Infrarrojos (mando a distancia) a. Control de actuadores
ARD09 - Servomotores. This page was exported from - Recursos para programadores Export date: Sat Jan 19 22:16: / GMT
 Export date: Sat Jan 19 22:16:31 2019 / +0000 GMT ARD09 - Servomotores Con Arduino es posible manejar, prácticamente, cualquier dispositivo. En este capítulo vamos a trabajar con servomotores. Son un tipo
Export date: Sat Jan 19 22:16:31 2019 / +0000 GMT ARD09 - Servomotores Con Arduino es posible manejar, prácticamente, cualquier dispositivo. En este capítulo vamos a trabajar con servomotores. Son un tipo
AR 10 T. Tutorial 10: Servomotores. Objetivo. Materiales
 10 T Tutorial 10: Servomotores Objetivo En la siguiente practica vamos a conocer que es un servomotor y como utilizarlo programándolo de una manera sencilla y con muchas aplicaciones. Materiales 1 Arduino
10 T Tutorial 10: Servomotores Objetivo En la siguiente practica vamos a conocer que es un servomotor y como utilizarlo programándolo de una manera sencilla y con muchas aplicaciones. Materiales 1 Arduino
CONSTRUCCION DE TIMER PARA VUELO CIRCULAR CON MOTOR ELECTRICO
 CONSTRUCCION DE TIMER PARA VUELO CIRCULAR CON MOTOR ELECTRICO Vamos a construir un timer para su utilización en vuelo circular sin precisar conocimientos previos de electrónica ni informática más allá
CONSTRUCCION DE TIMER PARA VUELO CIRCULAR CON MOTOR ELECTRICO Vamos a construir un timer para su utilización en vuelo circular sin precisar conocimientos previos de electrónica ni informática más allá
UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLOGICOS ELECTRONICA
 CICLO 01-2015 UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLOGICOS ELECTRONICA GUIA DE LABORATORIO Nº 6 Nombre de la práctica: Control de Motores Lugar de ejecución: Laboratorio 3.23 (CITT) Tiempo estimado:
CICLO 01-2015 UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLOGICOS ELECTRONICA GUIA DE LABORATORIO Nº 6 Nombre de la práctica: Control de Motores Lugar de ejecución: Laboratorio 3.23 (CITT) Tiempo estimado:
Sesión 12: Practica 3: Creación de prototipo básico de Arduino.
 Sesión 12: Practica 3: Creación de prototipo básico de Arduino. Introducción Arduino es una plataforma electrónica de prototipos de código abierto (open-source) basada en hardware y software flexible y
Sesión 12: Practica 3: Creación de prototipo básico de Arduino. Introducción Arduino es una plataforma electrónica de prototipos de código abierto (open-source) basada en hardware y software flexible y
CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO
 CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO 1 Nombre, apellidos y correo electrónico de EducaMadrid del participante EZEQUIEL CABRILLO GARCÍA ezequiel.cabrillo@educa.madrid.org En grupo con FRANCISCO
CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO 1 Nombre, apellidos y correo electrónico de EducaMadrid del participante EZEQUIEL CABRILLO GARCÍA ezequiel.cabrillo@educa.madrid.org En grupo con FRANCISCO
Control de LCD y sensor de temperatura
 Control de LCD y sensor de temperatura Componentes Protoboard Arduino UNO Sensor de temperatura LM35 Potenciómetro (resistencia variable) Resistencia de 220 Ω Pantalla LCD 16 x 2 20 cables jumpers Montaje
Control de LCD y sensor de temperatura Componentes Protoboard Arduino UNO Sensor de temperatura LM35 Potenciómetro (resistencia variable) Resistencia de 220 Ω Pantalla LCD 16 x 2 20 cables jumpers Montaje
Comunicación Serial con Arduino (Por Antony García González - Enero 27, 2013 )
") Ejercicio Display 7 segmentos (Continuación) (versión 18-10-18) OBJETIVOS: En el ejercicio anterior aprendimos a trabajar con el display de 7 segmentos. Vamos a agregarle al circuito empleado algunos sensores,
Ejercicio Display 7 segmentos (Continuación) (versión 18-10-18) OBJETIVOS: En el ejercicio anterior aprendimos a trabajar con el display de 7 segmentos. Vamos a agregarle al circuito empleado algunos sensores,
TEMA 6: ROBÓTICA -PROGRAMACIÓN
 Tecnología 4ºESO. Departamento de Tecnología. IES Nuestra Señora de la Almudena Mª Jesús Saiz TEMA 6: ROBÓTICA -PROGRAMACIÓN La robótica es la rama de la tecnología que se dedica al diseño y construcción
Tecnología 4ºESO. Departamento de Tecnología. IES Nuestra Señora de la Almudena Mª Jesús Saiz TEMA 6: ROBÓTICA -PROGRAMACIÓN La robótica es la rama de la tecnología que se dedica al diseño y construcción
Control de brazo robótico por Bluetooth (Compatible solo con dispositivos Android)
") Control de brazo robótico por Bluetooth (Compatible solo con dispositivos Android) Se realizará el control de un brazo robótico mediante el módulo bluetooth, el brazo está conformado por 5 motores. Objetivo
Control de brazo robótico por Bluetooth (Compatible solo con dispositivos Android) Se realizará el control de un brazo robótico mediante el módulo bluetooth, el brazo está conformado por 5 motores. Objetivo
Tutorial 6: Qué es una función? y como utilizarla
 Tutorial 6: Qué es una función? y como utilizarla AR 6 T Objetivo En la siguiente lección desarrollaremos el tema de las funciones en Arduino, para poder aplicarlo en las practicas siguientes ya que será
Tutorial 6: Qué es una función? y como utilizarla AR 6 T Objetivo En la siguiente lección desarrollaremos el tema de las funciones en Arduino, para poder aplicarlo en las practicas siguientes ya que será
TALLER ARDUINO BÁSICO
 TALLER ARDUINO BÁSICO Versión 1.0 Autor: Ángel Sánchez García Introducción En este primer taller se explicará el funcionamiento de la plataforma Arduino y los conocimientos básicos para interactuar con
TALLER ARDUINO BÁSICO Versión 1.0 Autor: Ángel Sánchez García Introducción En este primer taller se explicará el funcionamiento de la plataforma Arduino y los conocimientos básicos para interactuar con
Tema: Manejo de pantallas y teclados
 Facultad: Ingeniería Escuela: Electrónica Asignatura: Interfaces y Periféricos Tema: Manejo de pantallas y teclados Objetivos Específicos. Realizar Interfaces con Arduino haciendo uso de dispositivos de
Facultad: Ingeniería Escuela: Electrónica Asignatura: Interfaces y Periféricos Tema: Manejo de pantallas y teclados Objetivos Específicos. Realizar Interfaces con Arduino haciendo uso de dispositivos de
Figura Discos para enconder de las ruedas
 1.2.20. Encoders y Odometría La odometría es utilizada en robótica para saber dónde está un robot midiendo el movimiento de sus ruedas. En esta actividad nos construiremos y programaremos un enconder para
1.2.20. Encoders y Odometría La odometría es utilizada en robótica para saber dónde está un robot midiendo el movimiento de sus ruedas. En esta actividad nos construiremos y programaremos un enconder para
CONSTRUCCIÓN DE TIMER PARA VUELO CIRCULAR CON NANO ARDUINO
 CONSTRUCCIÓN DE TIMER PARA VUELO CIRCULAR CON NANO ARDUINO Para aquellos que se inician en el vuelo circular eléctrico, pueden realizar su propio timer basándose en una placa nano arduino totalmente configurable.
CONSTRUCCIÓN DE TIMER PARA VUELO CIRCULAR CON NANO ARDUINO Para aquellos que se inician en el vuelo circular eléctrico, pueden realizar su propio timer basándose en una placa nano arduino totalmente configurable.
Práctica 4. Entradas/Salidas Analógicas con Arduino
 Práctica 4. Entradas/Salidas Analógicas con Arduino Manuel Jiménez Buendía José Alfonso Vera Repullo Departamento de Tecnología Electrónica Curso 2013/2014 Índice Índice 1. Conocimientos previos. 1.1.
Práctica 4. Entradas/Salidas Analógicas con Arduino Manuel Jiménez Buendía José Alfonso Vera Repullo Departamento de Tecnología Electrónica Curso 2013/2014 Índice Índice 1. Conocimientos previos. 1.1.
CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO. ÍÑIGO MARTÍN MIMBELA.
 CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO 1 Nombre, apellidos y correo electrónico de EducaMadrid del participante ÍÑIGO MARTÍN MIMBELA. inigo.martin@educa.madrid.org 2 Título de la Unidad Didáctica
CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO 1 Nombre, apellidos y correo electrónico de EducaMadrid del participante ÍÑIGO MARTÍN MIMBELA. inigo.martin@educa.madrid.org 2 Título de la Unidad Didáctica
Tecnológico Nacional de México
 Tecnológico Nacional de México Instituto Tecnológico de Ensenada Introduccio n a la tecnologí a arduino Instructor: M. E. Oscar Martin Tirado Ochoa Ensenada, B. C. Junio del 2015 Contenido Hola mundo...
Tecnológico Nacional de México Instituto Tecnológico de Ensenada Introduccio n a la tecnologí a arduino Instructor: M. E. Oscar Martin Tirado Ochoa Ensenada, B. C. Junio del 2015 Contenido Hola mundo...
GUIA DE EJERCICIOS Nº 3 INSTRUMENTACIÓN AVANZADA
 GUIA DE EJERCICIOS Nº 3 INSTRUMENTACIÓN AVANZADA Comunicando LabVIEW a una placa ARDUINO 1 3.-COMUNICANDO LABVIEW A UNA PLACA ARDUINO El objetivo de esta guía es realizar un semáforo de un tiempo (1 única
GUIA DE EJERCICIOS Nº 3 INSTRUMENTACIÓN AVANZADA Comunicando LabVIEW a una placa ARDUINO 1 3.-COMUNICANDO LABVIEW A UNA PLACA ARDUINO El objetivo de esta guía es realizar un semáforo de un tiempo (1 única
PRACTICAS CON ARDUINO
 PRACTICAS CON ARDUINO 1º DE BACHILLERATO PROYECTO INTEGRADO: TALLER DE ROBÓTICA Materiales: Placa Protoboard Microcontroladora Arduino Cable de conexión 1 LED 1 resistencia 120 Ω Cables PRÁCTICA Nº 1:
PRACTICAS CON ARDUINO 1º DE BACHILLERATO PROYECTO INTEGRADO: TALLER DE ROBÓTICA Materiales: Placa Protoboard Microcontroladora Arduino Cable de conexión 1 LED 1 resistencia 120 Ω Cables PRÁCTICA Nº 1:
Domótica con Arduino, WiFi y Android
 Domótica con Arduino, WiFi y Android Módulo WiFi ESP8266 Usaremos para este ejemplo el módulo ESP8266 para activar las luces de casa desde un teléfono móvil Android con WiFi. Realizamos las siguientes
Domótica con Arduino, WiFi y Android Módulo WiFi ESP8266 Usaremos para este ejemplo el módulo ESP8266 para activar las luces de casa desde un teléfono móvil Android con WiFi. Realizamos las siguientes
Conviértete en un Joven Inventor PENTA UC TAV 2014. Humano-Máquina
 Clase 5: Comunicación Conviértete en un Joven Inventor PENTA UC TAV 2014 Humano-Máquina Contenidos La Comunicación Problema: Debugear el uc Solución: Leds Buzzer LCD Comunicación Serial Desafío Contenidos
Clase 5: Comunicación Conviértete en un Joven Inventor PENTA UC TAV 2014 Humano-Máquina Contenidos La Comunicación Problema: Debugear el uc Solución: Leds Buzzer LCD Comunicación Serial Desafío Contenidos
Arduino. DHT11 Sensor Temperatura y Humedad
 DHT11 Sensor Temperatura y Humedad LunikSoft Fco. Javier Andrade http://www.luniksoft.info El autor no se responsabiliza del contenido. No asume ninguna responsabilidad, por cualquier inexactitud en la
DHT11 Sensor Temperatura y Humedad LunikSoft Fco. Javier Andrade http://www.luniksoft.info El autor no se responsabiliza del contenido. No asume ninguna responsabilidad, por cualquier inexactitud en la
Comunicación Serial Arduino UNO vs Leonardo
 Comunicación Serial Arduino UNO vs Leonardo Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. COMUNICACIÓN SERIAL Página 2 de 7 Ingeniería MCI Ltda. Luis Thayer Ojeda
Comunicación Serial Arduino UNO vs Leonardo Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. COMUNICACIÓN SERIAL Página 2 de 7 Ingeniería MCI Ltda. Luis Thayer Ojeda
Antes del armado del Brazo Robótico se debe hacer una calibracion de los servomotores:
 Lista de ateriales es con sus accesorios 8 s en acrílico, nueradas del al (ver Anexos) s # s # s #0 Pernos y tuercas M pernos de pernos de 0 9 pernos pernos de 0 0 tuercas apoyos de Goa Antes del arado
Lista de ateriales es con sus accesorios 8 s en acrílico, nueradas del al (ver Anexos) s # s # s #0 Pernos y tuercas M pernos de pernos de 0 9 pernos pernos de 0 0 tuercas apoyos de Goa Antes del arado
Conexiones eléctricas 1. Primero debes nombrar cada servomotor: "Base", "Hombro", "Codo" o
 Lista de ateriales Arduino Uno placa de conexiones o protoboard Cables cables achohebra (alefeale) para la placa de conexiones Todos los necesarios en caso de usar un protoboard ódulo Bluetooth (HC06,
Lista de ateriales Arduino Uno placa de conexiones o protoboard Cables cables achohebra (alefeale) para la placa de conexiones Todos los necesarios en caso de usar un protoboard ódulo Bluetooth (HC06,
EducaBot. Motores y movilidad.
 CURSO PROVINCIAL: CONTROL Y ROBÓTICA EN TECNOLOGÍA ROBÓTICA EDUCATIVA EducaBot. Motores y movilidad. Manuel Hidalgo Díaz Antonio Martínez Núñez Noviembre 2009 EducaBot 1ª fase. Terminado la placa de conexionado
CURSO PROVINCIAL: CONTROL Y ROBÓTICA EN TECNOLOGÍA ROBÓTICA EDUCATIVA EducaBot. Motores y movilidad. Manuel Hidalgo Díaz Antonio Martínez Núñez Noviembre 2009 EducaBot 1ª fase. Terminado la placa de conexionado
Tutorial: Uso de Driver L298N para motores DC con Arduino
 Tutorial: Uso de Driver L298N para motores DC con Arduino El siguiente tutorial esta basado en el Driver dual para motores (Full-Bridge) L298N, ofrecido por ELECTRONILAB.CO. Puedes adquirir este módulo
Tutorial: Uso de Driver L298N para motores DC con Arduino El siguiente tutorial esta basado en el Driver dual para motores (Full-Bridge) L298N, ofrecido por ELECTRONILAB.CO. Puedes adquirir este módulo
MES 1 V1.6. Minimal Experimental Shield 1 Versión 1.6 Para Arduino Duemilanove y compatibles
 MES 1 V1.6 Minimal Experimental Shield 1 Versión 1.6 Para Arduino Duemilanove y compatibles Salvador García Bernal M.C. en Electrónica y Sistemas Digitales Lic. en Ing. Electrónica y Computadoras Primera
MES 1 V1.6 Minimal Experimental Shield 1 Versión 1.6 Para Arduino Duemilanove y compatibles Salvador García Bernal M.C. en Electrónica y Sistemas Digitales Lic. en Ing. Electrónica y Computadoras Primera
Módulo Radio frecuencia FSK y Arduino
 ABC PROYECTOS ELECTRÓNICOS ABCelectronica.net 1 Módulo Radio frecuencia FSK y Arduino El objetivo de este circuito básico es la posibilidad de enviar una palabra cada cierto tiempo entre un transmisor
ABC PROYECTOS ELECTRÓNICOS ABCelectronica.net 1 Módulo Radio frecuencia FSK y Arduino El objetivo de este circuito básico es la posibilidad de enviar una palabra cada cierto tiempo entre un transmisor
PROYECTO DE ELECTRÓNICA
 PROYECTO DE ELECTRÓNICA Sistema de Alarma Raúl Lapaz de Juan Francisco Javier López Alcarria 1 ÍNDICE - Objetivo:... 3 - Justificación:... 3 - Plan de trabajo:... 3 A) Montaje del circuito en protoboards:...
PROYECTO DE ELECTRÓNICA Sistema de Alarma Raúl Lapaz de Juan Francisco Javier López Alcarria 1 ÍNDICE - Objetivo:... 3 - Justificación:... 3 - Plan de trabajo:... 3 A) Montaje del circuito en protoboards:...
Medidor de distancias En esta actividad utilizaremos un sensor de ultrasonidos como medidor de distancias
 1.2.15. Sensor Digital: Ultrasonidos En este apartado vamos a realizar varias actividades en donde utilizaremos los sensores de ultrasonido. Como veremos más adelante, un sensor de ultrasonido, al igual
1.2.15. Sensor Digital: Ultrasonidos En este apartado vamos a realizar varias actividades en donde utilizaremos los sensores de ultrasonido. Como veremos más adelante, un sensor de ultrasonido, al igual
Curso de introducción a la robótica. Juan Antonio Infantes Díaz Óscar Ramírez Jiménez
 Curso de introducción a la robótica Juan Antonio Infantes Díaz Óscar Ramírez Jiménez Índice Aprender el manejo de leds Aprender el manejo de pulsadores Aprender el manejo de servomotores Aprender el manejo
Curso de introducción a la robótica Juan Antonio Infantes Díaz Óscar Ramírez Jiménez Índice Aprender el manejo de leds Aprender el manejo de pulsadores Aprender el manejo de servomotores Aprender el manejo
Taller de electrónica para usos creativos: Interconexión con instrumentos musicales a través de MIDI
 Taller de electrónica para usos creativos: Interconexión con instrumentos musicales a través de MIDI 8 al 11 de Mayo de 2008 Yago Torroja 1 MIDI: Qué es? Qué es MIDI? uff! varias cosas Un sistema de interconexión
Taller de electrónica para usos creativos: Interconexión con instrumentos musicales a través de MIDI 8 al 11 de Mayo de 2008 Yago Torroja 1 MIDI: Qué es? Qué es MIDI? uff! varias cosas Un sistema de interconexión
Curso Arduino avanzado
 Febrero 2017 Curso Arduino avanzado Ricardo Castrillejo Abad INDICE 1. CURSO... 4 1.1 OBJETIVO DEL PRIMER DÍA... 4 1.2 OBJETIVO DEL SEGUNDO DÍA... 4 2. AVANZADO: CLASE 1 (2H)... 4 2.1 OBJETIVOS (30MIN)...
Febrero 2017 Curso Arduino avanzado Ricardo Castrillejo Abad INDICE 1. CURSO... 4 1.1 OBJETIVO DEL PRIMER DÍA... 4 1.2 OBJETIVO DEL SEGUNDO DÍA... 4 2. AVANZADO: CLASE 1 (2H)... 4 2.1 OBJETIVOS (30MIN)...
Display LCD y memorias
 1.2.21. Display LCD y memorias En este apartado vamos a utilizar un Display LCD para mostrar datos procedentes de nuestra placa ZUM BT o Arduino UNO compatible. Hay diferentes tipos de displays LCD. Podemos
1.2.21. Display LCD y memorias En este apartado vamos a utilizar un Display LCD para mostrar datos procedentes de nuestra placa ZUM BT o Arduino UNO compatible. Hay diferentes tipos de displays LCD. Podemos
EducaBot. Sensores 2º parte.
 CURSO PROVINCIAL: CONTROL Y ROBÓTICA EN TECNOLOGÍA ROBÓTICA EDUCATIVA EducaBot. Sensores 2º parte. Manuel Hidalgo Díaz Noviembre 2009 Nivel de reacción. Al EducaBot se le va a añadir unos sensores para
CURSO PROVINCIAL: CONTROL Y ROBÓTICA EN TECNOLOGÍA ROBÓTICA EDUCATIVA EducaBot. Sensores 2º parte. Manuel Hidalgo Díaz Noviembre 2009 Nivel de reacción. Al EducaBot se le va a añadir unos sensores para
Instituto Tecnológico de Colima
 Instituto Tecnológico de Colima Departamento de Ingeniería Industrial Ingeniería en Mecatrónica Materia: Programación Avanzada Unidad 3 Practica 12 Detector de presencia con sensor HC-SR501 Alumnos: Hernández
Instituto Tecnológico de Colima Departamento de Ingeniería Industrial Ingeniería en Mecatrónica Materia: Programación Avanzada Unidad 3 Practica 12 Detector de presencia con sensor HC-SR501 Alumnos: Hernández
Elementos de Mecatrónica. Dr. José Sebastián Gutiérrez Calderón Profesor Investigador - Ingenierías UP
 Elementos de Mecatrónica Dr. José Sebastián Gutiérrez Calderón Profesor Investigador - Ingenierías UP jsgutierrez@up.edu.mx Temas generales del curso Conceptos básicos de la mecatrónica Características
Elementos de Mecatrónica Dr. José Sebastián Gutiérrez Calderón Profesor Investigador - Ingenierías UP jsgutierrez@up.edu.mx Temas generales del curso Conceptos básicos de la mecatrónica Características
Clase 2: Programación
 Clase 2: Conviértete en un Joven Inventor PENTA UC TAV 2014 Contenidos Qué es un micro-controlador? Configuración IDE Arduino Qué es programar? Ejemplo Tipos de datos Funciones útiles Contenidos Qué es
Clase 2: Conviértete en un Joven Inventor PENTA UC TAV 2014 Contenidos Qué es un micro-controlador? Configuración IDE Arduino Qué es programar? Ejemplo Tipos de datos Funciones útiles Contenidos Qué es
Tutorial Arduino con Fotoresistencia LDR
 www.candy-ho.com Contactanos 1139685940 ventas@candy-ho.com Mejico 3941 Unidad 1, Villa Martelli Lunes a Viernes 10:00 a 18:00 Tutorial Arduino con Fotoresistencia LDR En este artículo vamos a realizar
www.candy-ho.com Contactanos 1139685940 ventas@candy-ho.com Mejico 3941 Unidad 1, Villa Martelli Lunes a Viernes 10:00 a 18:00 Tutorial Arduino con Fotoresistencia LDR En este artículo vamos a realizar
DESARROLLO DE UN PROYECTO DE SISTEMAS AUTOMÁTICOS
 MÁSTER UNIVERSITARIO DE FORMACIÓN DE PROFESORADO EN EDUCACIÓN SECUNDARIA OBLIGATORIA Y BACHILLLERATO, FORMACIÓN PROFESIONAL Y ENSEÑANZAS DE IDIOMAS MÓDULO ESPECÍFICO: Tecnología y ciclos formativos del
MÁSTER UNIVERSITARIO DE FORMACIÓN DE PROFESORADO EN EDUCACIÓN SECUNDARIA OBLIGATORIA Y BACHILLLERATO, FORMACIÓN PROFESIONAL Y ENSEÑANZAS DE IDIOMAS MÓDULO ESPECÍFICO: Tecnología y ciclos formativos del
PROYECTO EN ARDUINO: SISTEMA DE SEGURIDAD CON SENSORES MAGNETICOS Y CONTRASEÑA
 PROYECTO EN ARDUINO: SISTEMA DE SEGURIDAD CON SENSORES MAGNETICOS Y CONTRASEÑA Integrantes: Pablo Rieser Ezequiel Carrascosa Contenido Introduccion... 2 Componentes... 2 Donde comprar los componentes:...
PROYECTO EN ARDUINO: SISTEMA DE SEGURIDAD CON SENSORES MAGNETICOS Y CONTRASEÑA Integrantes: Pablo Rieser Ezequiel Carrascosa Contenido Introduccion... 2 Componentes... 2 Donde comprar los componentes:...
El objetivo del proyecto el logra que arduino sea un servidor web. Poder acceder a contenidos web como cliente, usar Arduino como servidor.
 Proyecto Ethernet shield conectar arduino a internet El objetivo del proyecto el logra que arduino sea un servidor web. Poder acceder a contenidos web como cliente, usar Arduino como servidor. La idea
Proyecto Ethernet shield conectar arduino a internet El objetivo del proyecto el logra que arduino sea un servidor web. Poder acceder a contenidos web como cliente, usar Arduino como servidor. La idea
3 Sensores y transductores. Alfaomega. Material Web. Arduino 2. Electrónica en arquitectura abierta 7
 3 Sensores y transductores Capítulo Material Web Arduino 2 Electrónica en arquitectura abierta 7 2 Sensores y transductores 3.1. 3.1 Arduino Un elemento de la instrumentación actual es el microcontrolador,
3 Sensores y transductores Capítulo Material Web Arduino 2 Electrónica en arquitectura abierta 7 2 Sensores y transductores 3.1. 3.1 Arduino Un elemento de la instrumentación actual es el microcontrolador,
2.- En el IDE de Arduino, escribir el siguiente programa para probar el funcionamiento del módulo:
 Práctica 1 Para esta práctica se necesitarán los siguientes componentes: 1 Arduino con cable USB Cables 1 Protoboard 1 Módulo Bluetooth HC-05 o HC-06 Resistencias de 1kΩ, 2.2kΩ, 10kΩ Baterías o cargador
Práctica 1 Para esta práctica se necesitarán los siguientes componentes: 1 Arduino con cable USB Cables 1 Protoboard 1 Módulo Bluetooth HC-05 o HC-06 Resistencias de 1kΩ, 2.2kΩ, 10kΩ Baterías o cargador
SHIELD DE EXTENSIÓN CON ENTRADAS ANALÓGICAS
 OCTubre 2016 SHIELD DE EXTENSIÓN CON ENTRADAS ANALÓGICAS WWW.VELLEMANPROJECTS.EU Introducción La Arduino UNO está equipada con 6 entradas analógicas. Sin embargo, para muchos proyectos (p.ej. sensor, robot)
OCTubre 2016 SHIELD DE EXTENSIÓN CON ENTRADAS ANALÓGICAS WWW.VELLEMANPROJECTS.EU Introducción La Arduino UNO está equipada con 6 entradas analógicas. Sin embargo, para muchos proyectos (p.ej. sensor, robot)
IM : ARDUINO NANO OEM
 IM130615004: ARDUINO NANO OEM NIVEL DE ENTRADA Básico Estas placas y módulos son los mejores para iniciar a programar un micro-controlador Descripción Arduino Nano es una pequeña placa basada en el ATmega328
IM130615004: ARDUINO NANO OEM NIVEL DE ENTRADA Básico Estas placas y módulos son los mejores para iniciar a programar un micro-controlador Descripción Arduino Nano es una pequeña placa basada en el ATmega328
Taller de Hardware Libre con Arduino
 Taller de Hardware Libre con Arduino Pablo Suárez Hernández pablo@osl.ull.es Adrián Rodríguez Vargas arodriguez@osl.ull.es Oficina de Software Libre - http://osl.ull.es Universidad de La Laguna Cursos
Taller de Hardware Libre con Arduino Pablo Suárez Hernández pablo@osl.ull.es Adrián Rodríguez Vargas arodriguez@osl.ull.es Oficina de Software Libre - http://osl.ull.es Universidad de La Laguna Cursos
Introducción a Arduino. Electrónica para todos.
 Introducción a Arduino. Electrónica para todos. Qué es Arduino? Qué es Opensource? Opensource (Código abierto o fuente abierta): Software distribuido y desarrollado libremente. Busca los beneficios prácticos
Introducción a Arduino. Electrónica para todos. Qué es Arduino? Qué es Opensource? Opensource (Código abierto o fuente abierta): Software distribuido y desarrollado libremente. Busca los beneficios prácticos
Programación de dispositivos Arduino Asignatura Sistemas Digitales!
 Programación de dispositivos Arduino Asignatura Sistemas Digitales! Gabriel Astudillo Muñoz Escuela de Ingeniería Civil en Informática Universidad de Valparaíso, Chile http://informatica.uv.cl Descripción
Programación de dispositivos Arduino Asignatura Sistemas Digitales! Gabriel Astudillo Muñoz Escuela de Ingeniería Civil en Informática Universidad de Valparaíso, Chile http://informatica.uv.cl Descripción
PRÁCTICA NÚMERO 5: COMUNICACIÓN ENTRE DOS ARDUINOS CON RF
 PRÁCTICA NÚMERO 5: COMUNICACIÓN ENTRE DOS ARDUINOS CON RF 433 MHz Nombre del instituto: I.E.S Politécnico Nombre del ciclo: Sistemas electrotécnicos y automatizados ÍNDICE 1. Descripción de la práctica
PRÁCTICA NÚMERO 5: COMUNICACIÓN ENTRE DOS ARDUINOS CON RF 433 MHz Nombre del instituto: I.E.S Politécnico Nombre del ciclo: Sistemas electrotécnicos y automatizados ÍNDICE 1. Descripción de la práctica
INTERRUPTOR CREPUSCULAR CON LDR Y ARDUINO OBJETIVOS MATERIAL NECESARIO
 INTERRUPTOR CREPUSCULAR CON LDR Y ARDUINO OBJETIVOS Aprender mediante una aplicación práctica el funcionamiento de una LDR. Aprender cómo se utilizan las entradas analógicas de ARDUINO. MATERIAL NECESARIO
INTERRUPTOR CREPUSCULAR CON LDR Y ARDUINO OBJETIVOS Aprender mediante una aplicación práctica el funcionamiento de una LDR. Aprender cómo se utilizan las entradas analógicas de ARDUINO. MATERIAL NECESARIO
CYBERTECH 2018 TALLER 03: MOTORES Y POTENCIA
 CYBERTECH 2018 TALLER 03: MOTORES Y POTENCIA MATERIALES Arduino Motor Shield LDR Pulsador Pila 9V Motor DC Resistencias Cables MOTORES DC La velocidad de giro depende de la tensión Necesitan una reductora
CYBERTECH 2018 TALLER 03: MOTORES Y POTENCIA MATERIALES Arduino Motor Shield LDR Pulsador Pila 9V Motor DC Resistencias Cables MOTORES DC La velocidad de giro depende de la tensión Necesitan una reductora
AR 1 T. Tutorial 1. Introducción a Arduino Controlando un LED.
 1 T Tutorial 1. Introducción a Arduino Controlando un LED. Objetivo general. Conocer los conceptos básicos de Arduino para aplicarlos, encender y apagar un LED como primera práctica. Qué es Arduino? Arduino
1 T Tutorial 1. Introducción a Arduino Controlando un LED. Objetivo general. Conocer los conceptos básicos de Arduino para aplicarlos, encender y apagar un LED como primera práctica. Qué es Arduino? Arduino
2.- Cargar el código correspondiente a cada Arduino para su funcionamiento como Master o Esclavo.
 Práctica 1 - Serial Peripheral Interface Para esta práctica se la librería SPI.h. 1.- Conectar dos Arduino siguiendo el diagrama siguiente: La asignación de pines quedará de la siguiente manera: (SS) :
Práctica 1 - Serial Peripheral Interface Para esta práctica se la librería SPI.h. 1.- Conectar dos Arduino siguiendo el diagrama siguiente: La asignación de pines quedará de la siguiente manera: (SS) :
Módulo Transceptor Inalámbrico NRF24L01 Número de Parte: MD0040
 Módulo Transceptor Inalámbrico NRF24L01 Número de Parte: MD0040 Descripción NRF24L01 es un tranceptor de banda universal ISM. - Transceptor inalámbrico que incluye: generador de frecuencia, el tipo mejorada,
Módulo Transceptor Inalámbrico NRF24L01 Número de Parte: MD0040 Descripción NRF24L01 es un tranceptor de banda universal ISM. - Transceptor inalámbrico que incluye: generador de frecuencia, el tipo mejorada,
Obligatorio 2: Servomotores - Aspectos básicos de programación
 Obligatorio 2: Servomotores - Aspectos básicos de programación Introducción Este obligatorio busca implementar un código sencillo para el manejo de servomotores mediante una placa Arduino. En el proceso
Obligatorio 2: Servomotores - Aspectos básicos de programación Introducción Este obligatorio busca implementar un código sencillo para el manejo de servomotores mediante una placa Arduino. En el proceso
Qué es un Robot. Entidad artificial Da la sensación de tener un propósito propio. Entorno. Club de Robótica-Mecatrónica UAM 2012
 HKTR9000 Qué es un Robot Entidad artificial Da la sensación de tener un propósito propio Sensores Procesador Actuadores Entorno Robot Toyota por Chris73 - Wikimedia Sensores Infrarrojos GP2D12, CNY70...
HKTR9000 Qué es un Robot Entidad artificial Da la sensación de tener un propósito propio Sensores Procesador Actuadores Entorno Robot Toyota por Chris73 - Wikimedia Sensores Infrarrojos GP2D12, CNY70...
Proyecto final Microcontroladores: Sistema De Seguridad Caja Fuerte Integrantes:
 Proyecto final Microcontroladores: Sistema De Seguridad Caja Fuerte Integrantes: Ramiro Lescano Julian Basello INDICE 1.-OBJETIVO.. 2 2.-DESARROLLO DEL PROYECTO..... 2 2.1.-Materiales necesarios. 2 2.2.-Montaje
Proyecto final Microcontroladores: Sistema De Seguridad Caja Fuerte Integrantes: Ramiro Lescano Julian Basello INDICE 1.-OBJETIVO.. 2 2.-DESARROLLO DEL PROYECTO..... 2 2.1.-Materiales necesarios. 2 2.2.-Montaje
EJERCICIOS CON ARDUINO LED ENCENDIDO. Se conecta el Led al pin 52 y a alimentación. Compilar Se enciende el LED.
 EJERCICIOS CON ARDUINO LED ENCENDIDO Se conecta el Led al pin 52 y a alimentación. Compilar Se enciende el LED. MARÍA TERESA CUESTA CALVO M03-ARDUINO PROYECTOS VARIOS 1 / 23 LED BICOLOR Led bicolor. Conectado
EJERCICIOS CON ARDUINO LED ENCENDIDO Se conecta el Led al pin 52 y a alimentación. Compilar Se enciende el LED. MARÍA TERESA CUESTA CALVO M03-ARDUINO PROYECTOS VARIOS 1 / 23 LED BICOLOR Led bicolor. Conectado
COMUNICACIÓN ENTRE ARDUINOS USANDO MÓDULOS HC-05
 COMUNICACIÓN ENTRE ARDUINOS USANDO MÓDULOS HC-05 Ahora veremos cómo trabajar con el HC-05 como dispositivo maestro, cambiar la velocidad de transmisión, el nombre y código de vinculación entre otras cosas.
COMUNICACIÓN ENTRE ARDUINOS USANDO MÓDULOS HC-05 Ahora veremos cómo trabajar con el HC-05 como dispositivo maestro, cambiar la velocidad de transmisión, el nombre y código de vinculación entre otras cosas.
CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO
 CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO 1 Nombre, apellidos y correo electrónico de EducaMadrid del participante JAIME REDONDO MORA jaime.redondo@educa.madrid.org 2 Título de la Unidad Didáctica
CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO 1 Nombre, apellidos y correo electrónico de EducaMadrid del participante JAIME REDONDO MORA jaime.redondo@educa.madrid.org 2 Título de la Unidad Didáctica
Introducción Arduino TPR 3º ESO
 Programar consiste en decirle a tu Arduino y a los actuadores que éste controla, desde sus puertos, lo que tiene que hacer. El programa instalado en nuestro PC tiene el icono siguiente: Al abrir el programa,
Programar consiste en decirle a tu Arduino y a los actuadores que éste controla, desde sus puertos, lo que tiene que hacer. El programa instalado en nuestro PC tiene el icono siguiente: Al abrir el programa,
Lectura de pines analógicos
 Lectura de pines analógicos 1. Componentes Arduino UNO Cable USB Placa de prototipado Cables jumpers 2 resistencias de 10 kω Potenciómetro de 10 kω 3 resistencias de 220 kω Botón RGB Led Fotoresistencia
Lectura de pines analógicos 1. Componentes Arduino UNO Cable USB Placa de prototipado Cables jumpers 2 resistencias de 10 kω Potenciómetro de 10 kω 3 resistencias de 220 kω Botón RGB Led Fotoresistencia
2. Programación en Arduino
 2. Programación en Arduino Tallerine Android/LED Instituto de Ingenería Eléctrica 13 de marzo de 2017 IIE (TallerIne) Programación 13 de marzo de 2017 1 / 27 Repaso Conocimos al Arduino Vimos nociones
2. Programación en Arduino Tallerine Android/LED Instituto de Ingenería Eléctrica 13 de marzo de 2017 IIE (TallerIne) Programación 13 de marzo de 2017 1 / 27 Repaso Conocimos al Arduino Vimos nociones
OKY2002: Arduino Uno Genérico
 OKY2002: Arduino Uno Genérico Básico NIVEL DE ENTRADA Estas tarjetas y módulos son los ideales para iniciar a programar un microcontrolador y adentrarte al mundo de la tecnología. Descripción El OKI2002
OKY2002: Arduino Uno Genérico Básico NIVEL DE ENTRADA Estas tarjetas y módulos son los ideales para iniciar a programar un microcontrolador y adentrarte al mundo de la tecnología. Descripción El OKI2002
Ejecución del Plan Verano 2019
 Ejecución del Plan Verano 2019 PRIMARIA (KIDS) Plan verano 2019 (6-8 años): utilizar conceptos básicos de la matemática y la física a través de proyectos didácticos. Introducción a la Robótica Robot equilibrista
Ejecución del Plan Verano 2019 PRIMARIA (KIDS) Plan verano 2019 (6-8 años): utilizar conceptos básicos de la matemática y la física a través de proyectos didácticos. Introducción a la Robótica Robot equilibrista
MANUAL DE USUARIO Sensor de temperatura y humedad digital MCI-SEN-01561 REV. 1.0
 MANUAL DE USUARIO Sensor de temperatura y humedad digital MCI-SEN-01561 REV. 1.0 Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. Página 2 de 10 Ingeniería MCI Ltda.
MANUAL DE USUARIO Sensor de temperatura y humedad digital MCI-SEN-01561 REV. 1.0 Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. Página 2 de 10 Ingeniería MCI Ltda.