Tema 8. Saltos. (parte I)
|
|
|
- Juan Antonio Cárdenas Espinoza
- hace 7 años
- Vistas:
Transcripción
1 Tema 8 Saltos (parte I) 1

2 Ya vimos el salto incondicional con goto. SALTOS CONDICIONALES El repertorio del PIC16F84 también dispone de instrucciones de salto condicional, que son aquellas que producen un salto en función de que se cumpla o no una condición. Estas instrucciones son el único medio para realizar bifurcaciones condicionales en un programa. Hay 4 instrucciones de salto condicional clasificadas en 2 grupos: btfsc, btfss que pueden producir el salto en función del estado de un bit decfsz, incfsz que pueden producir el salto en función del contenido de un registro distinto de cero. Las instrucciones de salto no afectan a los flags del registro STATUS (C, DC y Z). 2

3 SALTOS EN FUNCIÓN DE UN BIT Tema 8. Saltos Son muy poderosas ya que permiten al programa tomar decisiones en función del estado de un bit de cualquier registro o puerto de entrada/salida. Hay 2 instrucciones de este tipo: btfsc f,b btfss f,b 3

4 SALTOS EN FUNCIÓN DE UN BIT Tema 8. Saltos Nemónico Descripción Bit Test f, Skip if Clear. (Salta si el bit b del f es 0.) btfsc f,b - Si el bit número b del registro f es 1 la instrucción que sigue a ésta se ejecuta normalmente. - Si el bit número b del registro f es 0 la instrucción que sigue a ésta se ignora y se salta. Ejemplo: Aquí btfsc Flag,1 ;Si el bit 1 del registro Flag es 0 salta Falso goto ProcesoX ; Ha sido 1 Verdad... ; Ha sido 0 Antes: Después: (PC)= Dirección de Aquí Si el bit 1 delregistro Flag=0, (PC)=Dirección de Verdad Si el bit 1 del registro Flag=1, (PC)=Dirección de Falso 4

5 SALTOS EN FUNCIÓN DE UN BIT Tema 8. Saltos Nemónico Descripción Bit Test f, Skip if Set. (Salta si el bit b del f es 1.) btfss f,b - Si el bit número b del registro f es 0 la instrucción que sigue a ésta se ejecuta normalmente. -Si el bit número b del registro f es 1 la instrucción que sigue a ésta se ignora y se salta. Ejemplo: Aquí btfss Flag,4 ;Si el bit 4 del registro Flag es 1 salta Falso goto ProcesoX ; Ha sido 0 Verdad... ; Ha sido 1 Antes: Después: (PC)= Dirección de Aquí Si el bit 4 delregistro Flag=1, (PC)=Dirección de Verdad Si el bit 4 del registro Flag=0, (PC)=Dirección de Falso 5

6 SALTOS EN FUNCIÓN DE UN BIT EJEMPLO: Saltos_01.asm Tema 8. Saltos 6

7 SALTOS EN FUNCIÓN DE UN REGISTRO Las instrucciones de salto condicional: decfsz f,d incfsz f,d pueden producir el salto en función del contenido de un registro distinto de cero y son casos especiales de las instrucciones de incremento y decremento de un registro analizadas en el tema anterior (decf e incf). 7

8 SALTOS EN FUNCIÓN DE UN REGISTRO Nemónico Descripción Decrement f, Skip if 0. decfsz f,d ( (f)-1 destino y salta si 0 si d=0, destino=(w) si d=1, destino=(f) ) Esta instrucción decrementa en una unidad el contenido del registro f. Almacena el resultado en (W ) si d=0 y en (f) si d=1. Después de decrementar, pueden ocurrir dos casos: - Si el resultado es distinto de cero la instrucción que sigue a ésta se ejecuta normalmente -Si el resultado es cero la instrucción que sigue a ésta se ignora y se salta. Ejemplo: Aquí decfsz Contador,F goto NoEsCero EsCero NoEsCero... Antes: Después: (PC)= Dirección de Aquí (Contador)=(Contador)-1 yademás: Si (Contador)=0, (PC)=Dirección de EsCero Si (Contador) 0, (PC)=Dirección de Aquí +1 (goto NoEsCero) 8

9 SALTOS EN FUNCIÓN DE UN REGISTRO Nemónico Descripción Increment f, Skip if 0. incfsz f,d ( (f)+1 destino y salta si 0 si d=0, destino=(w) si d=1, destino=(f) ) Esta instrucción incrementa en una unidad el contenido del registro f. Almacena el resultado en (W ) si d=0 y en (f) si d=1. Después de incrementar, pueden ocurrir dos casos: -Si el resultado es distinto de cero la instrucción que sigue a ésta se ejecuta normalmente. -Si el resultado es cero (porque al incrementarse se ha desbordado y ha pasado del número 0xFF al 0x00) la instrucción que sigue a ésta se ignora y se salta. Ejemplo: Aquí incfsz Contador,F goto Bucle Continua Bucle... Antes: Después: (PC)= Dirección de Aquí (Contador)=(Contador)+1 yademás: Si (Contador)=0 (256), (PC)=Dirección de Continua Si (Contador) 0, (PC)=Dirección de Aquí +1 (goto Bucle) 9
 la instrucción que sigue a ésta se ignora y se salta.")
10 COMPARACIÓN ENTRE REGISTROS Una de las más significativas aplicaciones de los saltos condicionales es la comparación entre registros: COMPROBAR QUE UN REGISTRO VALE 0 COMPROBAR LA IGUALDAD ENTRE 2 REGISTROS COMPROBAR QUE UN REGISTRO ES MAYOR O MENOR QUE OTRO 10

11 COMPROBAR QUE UN REGISTRO VALE 0 Para saber si un registro es 0 hay que cargar el registro sobre sí mismo mediante la instrucción movf, y así el contenido de f no cambia pero sí se afecta al flag Z. Ejemplo: movf Dato,F btfss STATUS,Z goto NoesCero EsCero NoesCero

12 COMPROBAR LA IGUALDAD ENTRE 2 REGISTROS Por ejemplo para comprobar si el contenido de los registros Dato1 y dato2 son iguales el programa sería: Ejemplo: movf Dato1,W subwf Dato2,W btfsc STATUS,Z goto Iguales NoIguales Iguales ; (Dato1) (W) ;(Dato2)-(Dato1) (W) 12
 (W) ;(Dato2)-(Dato1) (W) 12")
13 COMPROBAR QUE UN REGISTRO ES MAYOR O MENOR QUE OTRO En este caso hay que realizar la resta de ambos. Así siendo A y B dos registros cualesquiera y haciendo la operación (A-B) se tienen las siguientes posibilidades: Operación (A-B) Resultado Flags A>B A<B A=B Positivo Negativo Cero C=1 y Z=0 C=0 y Z=0 C=1 y Z=1 13
 Resultado Flags A>B A<B")
14 COMPROBAR QUE UN REGISTRO ES MAYOR O MENOR QUE OTRO Ejemplo: movf DatoB,W ; (DatoB) (W) subwf DatoA,W ;(DatoA)-(DatoB) (W) btfss STATUS,C ; C=1? goto Menor MayorIgual... ;C=1, ha sido (DatoA)>=(DatoB)... Menor... ;C=0, ha sido (DatoA)<(DatoB)... 14
>=(DatoB)... Menor.")
15 COMPROBAR QUE UN REGISTRO ES MAYOR O MENOR QUE OTRO Ejemplo (el de la práctica 2): 15

16 Más ejemplos con instrucciones de saltos.. 16

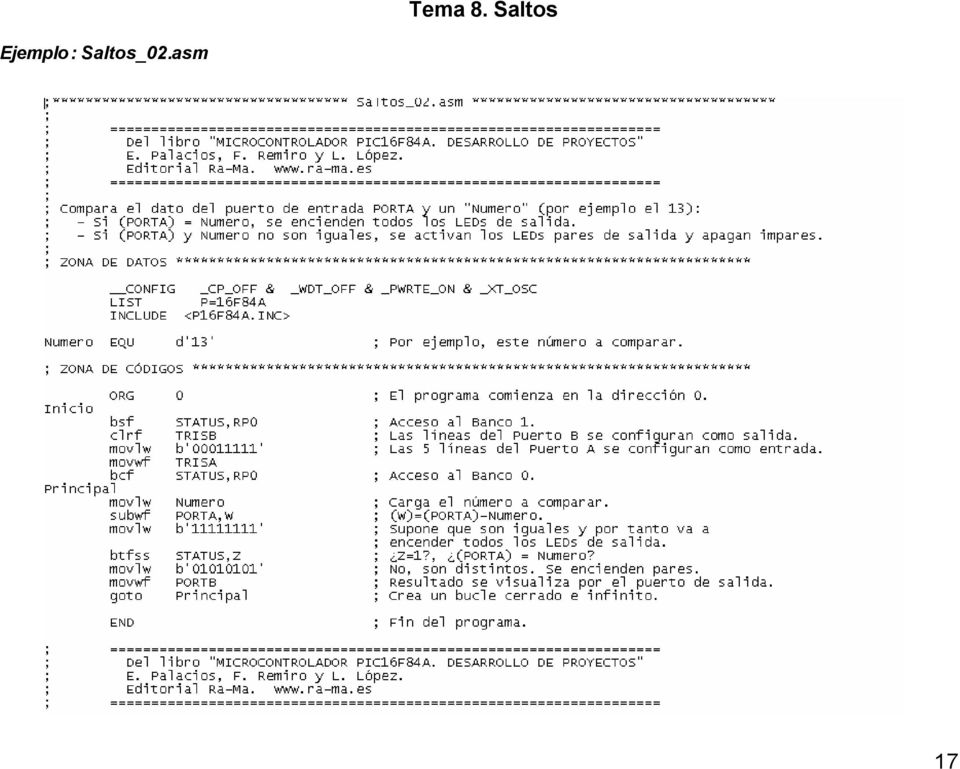
17 Ejemplo: Saltos_02.asm 17
18 Ejemplo; Saltos_05.asm 18

19 BIBLIOGRAFÍA "Microcontrolador PIC16F84, Desarrollo de proyectos" E. Palacios, F. Remiro, L.J. López. Ra-Ma, 2004 Podéis encontrar más información de este Tema 8 en el CAPÍTULO 9 19

SALTOS EN FUNCIONDE UN BIT Aquéllas que pueden producir el salto en función del estado de un bit. Son btfsc y
 SISTEMAS ELECTRONICOS DIGITALES SALTO CONDICIONAL El repertorio del PIC16F84 también dispone de instrucciones de salto condicional, que son aquéllas que producen un salto en función de que se cumpla o
SISTEMAS ELECTRONICOS DIGITALES SALTO CONDICIONAL El repertorio del PIC16F84 también dispone de instrucciones de salto condicional, que son aquéllas que producen un salto en función de que se cumpla o
DESCRIPCIÓN DE LAS INSTRUCCIONES
 Todas las instrucciones del PIC cumplen las siguientes condiciones: Las instrucciones son simples y rápidas. Todas tienen un tiempo de ejecución de un ciclo de instrucción (cuatro ciclos de reloj) a excepción
Todas las instrucciones del PIC cumplen las siguientes condiciones: Las instrucciones son simples y rápidas. Todas tienen un tiempo de ejecución de un ciclo de instrucción (cuatro ciclos de reloj) a excepción
PRÁCTICA 2: Programas básicos. Tipos de direccionamiento.
 SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 2: Programas básicos. Tipos de direccionamiento. Tipos de direccionamiento Ejemplos y ejercicios - 1 - 1. Objetivos - Introducir
SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 2: Programas básicos. Tipos de direccionamiento. Tipos de direccionamiento Ejemplos y ejercicios - 1 - 1. Objetivos - Introducir
Características generales
 REPERTORIO DE INSTRUCCIONES En esta sección se pretende: Conocer las características generales de las instrucciones para el PIC16F84 Los distintos modos de direccionamiento, y Los diferentes grupos de
REPERTORIO DE INSTRUCCIONES En esta sección se pretende: Conocer las características generales de las instrucciones para el PIC16F84 Los distintos modos de direccionamiento, y Los diferentes grupos de
Las Instrucciones. A continuación vamos a presentar el conjunto de instrucciones básico de los Microcontroladores Picmicro.
 Las Instrucciones A continuación vamos a presentar el conjunto de instrucciones básico de los Microcontroladores Picmicro. En general la instrucciones de los microcontroladores pueden clasificarse como:
Las Instrucciones A continuación vamos a presentar el conjunto de instrucciones básico de los Microcontroladores Picmicro. En general la instrucciones de los microcontroladores pueden clasificarse como:
Practica de PIC 16F84
 Practica de PIC 16F84 Los PIC son circuitos que pueden controlar dispositivos y diferentes sistemas, son como los PLC (controles lógico programable), además debo decir que es un circuito que tiene todas
Practica de PIC 16F84 Los PIC son circuitos que pueden controlar dispositivos y diferentes sistemas, son como los PLC (controles lógico programable), además debo decir que es un circuito que tiene todas
Carrera: Técnico Superior en Técnicas Digitales. Alumnos: Emiliano Teseo y José Luis Fernández
 Carrera: Técnico Superior en Técnicas Digitales Instituto: CENT 57 Trabajo final Año 2005 Alumnos: Emiliano Teseo y José Luis Fernández 1 ILUMINACION PARA VIDRIERAS Descripción general (Guía para el usuario)
Carrera: Técnico Superior en Técnicas Digitales Instituto: CENT 57 Trabajo final Año 2005 Alumnos: Emiliano Teseo y José Luis Fernández 1 ILUMINACION PARA VIDRIERAS Descripción general (Guía para el usuario)
Bucles: o Bucles infinitos o Bucles finitos o Bucles anidados Medir tiempos con MPLAB Ejemplos y ejercicios
 SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 3: Bucles Bucles: o Bucles infinitos o Bucles finitos o Bucles anidados Medir tiempos con MPLAB Ejemplos y ejercicios -
SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 3: Bucles Bucles: o Bucles infinitos o Bucles finitos o Bucles anidados Medir tiempos con MPLAB Ejemplos y ejercicios -
Instrucciones para programar el PIC16F877
 Instrucciones para programar el PIC16F877 2 Estos microcontroladores responden a una serie de instrucciones o códigos que se deben grabar en su memoria de programa, en total son 35. A continuación se encuentra
Instrucciones para programar el PIC16F877 2 Estos microcontroladores responden a una serie de instrucciones o códigos que se deben grabar en su memoria de programa, en total son 35. A continuación se encuentra
GAMA BAJA (PIC16C5X) ARQUITECTURA BÁSICA
 ARQUITECTURA BÁSICA") GAMA BAJA (PIC6CX) ARQUITECTURA BÁSICA Instrucciones -bit de palabra de instrucción ROM/EPROM desde a 04 palabras Hasta 4 páginas (xbits) de memoria de programa -bit de datos RAM desde a bytes Hasta 4
GAMA BAJA (PIC6CX) ARQUITECTURA BÁSICA Instrucciones -bit de palabra de instrucción ROM/EPROM desde a 04 palabras Hasta 4 páginas (xbits) de memoria de programa -bit de datos RAM desde a bytes Hasta 4
Set de instrucciones Microcontrolador PIC.
 Microcontroladores Pic 16F84A. Los PIC son una extensa familia microcontroladores divididos en tres gamas, la gama baja con memoria programa 12 bits, la gama media y la gama alta con memoria programa 14
Microcontroladores Pic 16F84A. Los PIC son una extensa familia microcontroladores divididos en tres gamas, la gama baja con memoria programa 12 bits, la gama media y la gama alta con memoria programa 14
ORGANIZACIÓN INTERNA + INTRODUCCIÓN AL ENSAMBLADOR
 ORGANIZACIÓN INTERNA + INTRODUCCIÓN AL ENSAMBLADOR ORGANIZACIÓN de la MEMORIA Dentro del PIC16F877 se distinguen tres bloques de memoria. Memoria de programa En sus 8192 posiciones (8K) contiene el programa
ORGANIZACIÓN INTERNA + INTRODUCCIÓN AL ENSAMBLADOR ORGANIZACIÓN de la MEMORIA Dentro del PIC16F877 se distinguen tres bloques de memoria. Memoria de programa En sus 8192 posiciones (8K) contiene el programa
MICROCONTROLADORES (III)
") Prof. Manuel Rivas MICROCONTROLADORES (III) Pautas generales de programación Operaciones con datos Operaciones aritméticas Operaciones de comparación Subrutinas Selección múltiple Configuración de puertos
Prof. Manuel Rivas MICROCONTROLADORES (III) Pautas generales de programación Operaciones con datos Operaciones aritméticas Operaciones de comparación Subrutinas Selección múltiple Configuración de puertos
Tema 5.1: Presentación de datos en pantalla
 Tema 5.1: Presentación de datos en pantalla El registro de flags del i8086 Instrucciones de transferencia Instrucciones de transferencia de control Instrucciones aritméticas: comparación Representación
Tema 5.1: Presentación de datos en pantalla El registro de flags del i8086 Instrucciones de transferencia Instrucciones de transferencia de control Instrucciones aritméticas: comparación Representación
Tema 3: Lenguaje ensamblador. La primera abstracción de la máquina para el programador
 Tema 3: Lenguaje ensamblador La primera abstracción de la máquina para el programador Índice Introducción. Generación código máquina: ensamblador, montador y cargador. Instrucciones y directivas. Macros
Tema 3: Lenguaje ensamblador La primera abstracción de la máquina para el programador Índice Introducción. Generación código máquina: ensamblador, montador y cargador. Instrucciones y directivas. Macros
INSTRUCCIONES DE ENSAMBLADOR
 MPLAB INSTRUCCIONES DE ENSAMBLADOR ORGANIZACIÓN de la MEMORIA Dentro del PIC16F877 se distinguen tres bloques de memoria. Memoria de programa En sus 8192 posiciones (8K) contiene el programa con las instrucciones
MPLAB INSTRUCCIONES DE ENSAMBLADOR ORGANIZACIÓN de la MEMORIA Dentro del PIC16F877 se distinguen tres bloques de memoria. Memoria de programa En sus 8192 posiciones (8K) contiene el programa con las instrucciones
INFORMÁTICA INDUSTRIAL. 3º INGENIERÍA TÉCNICA INDUSTRIAL. ESPECIALIDAD ELECTRÓNICA BOLETÍN 1. CURSO 2003/04
 INFORMÁTICA INDUSTRIAL. 3º INGENIERÍA TÉCNICA INDUSTRIAL. ESPECIALIDAD ELECTRÓNICA BOLETÍN 1. CURSO 20/04 1. Se colocan tres interruptores en las líneas RA0, RA1 y RA2 de la puerta A de un PIC16F84. Y
INFORMÁTICA INDUSTRIAL. 3º INGENIERÍA TÉCNICA INDUSTRIAL. ESPECIALIDAD ELECTRÓNICA BOLETÍN 1. CURSO 20/04 1. Se colocan tres interruptores en las líneas RA0, RA1 y RA2 de la puerta A de un PIC16F84. Y
UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLÓGICOS COORDINACIÓN DE ELECTRÓNICA GUÍA DE LABORATORIO Nº 02
 CICLO II-2013 UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLÓGICOS COORDINACIÓN DE ELECTRÓNICA GUÍA DE LABORATORIO Nº 02 Asignatura: Control Digital Nombre de la Practica: Instrucciones básicas de los
CICLO II-2013 UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLÓGICOS COORDINACIÓN DE ELECTRÓNICA GUÍA DE LABORATORIO Nº 02 Asignatura: Control Digital Nombre de la Practica: Instrucciones básicas de los
SISTEMA MÍNIMO BASADO EN EL PIC16F84
 PRÁCTICA 0 CIRCUITO BASE SISTEMA MÍNIMO BASADO EN EL PIC16F84 1 PRÁCTICA 1_1 COMPUERTA AND DE TRES ENTRADAS Hardware X0 X1 X2 Y 2 Comportamiento esperado INICIO Configurar Puerto A como entradas y Puerto
PRÁCTICA 0 CIRCUITO BASE SISTEMA MÍNIMO BASADO EN EL PIC16F84 1 PRÁCTICA 1_1 COMPUERTA AND DE TRES ENTRADAS Hardware X0 X1 X2 Y 2 Comportamiento esperado INICIO Configurar Puerto A como entradas y Puerto
Proposiciones Condicionales
 SENTENCIAS CONDICIONALES SIMPLES: if- Anteriormente se discutió que una de las estructuras utilizadas en la programación estructurada es la Estructura Selectiva o Condicional. Se explican aquí las sentencias
SENTENCIAS CONDICIONALES SIMPLES: if- Anteriormente se discutió que una de las estructuras utilizadas en la programación estructurada es la Estructura Selectiva o Condicional. Se explican aquí las sentencias
1. Proponer un circuito que tenga el puerto b como salida conectando 8 leds, realizando un programa que me encienda los bits 0, 1, 3, 5, 7.
 1. Proponer un circuito que tenga el puerto b como salida conectando 8 leds, realizando un programa que me encienda los bits 0, 1, 3, 5, 7. a. Diagrama de flujo b. Circuito C1 4 MHZ C2 R2 10k 16 15 4 R1
1. Proponer un circuito que tenga el puerto b como salida conectando 8 leds, realizando un programa que me encienda los bits 0, 1, 3, 5, 7. a. Diagrama de flujo b. Circuito C1 4 MHZ C2 R2 10k 16 15 4 R1
Escuela Politécnica Superior de Elche. EXAMEN DE SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS 2º Parte: Microcontroladores + Instrumentación Nombre:
 Escuela Politécnica Superior de Elche 4º Ingeniería Industrial EXAMEN DE SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS 2º Parte: Microcontroladores + Instrumentación Nombre: CUESTION 1 (3 puntos) Microcontroladores
Escuela Politécnica Superior de Elche 4º Ingeniería Industrial EXAMEN DE SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS 2º Parte: Microcontroladores + Instrumentación Nombre: CUESTION 1 (3 puntos) Microcontroladores
Lenguaje ensamblador Semana 2 Trabajando con el lenguaje ensamblador
 2016 Lenguaje ensamblador Semana 2 Trabajando con el lenguaje ensamblador Contenido Trabajando con el lenguaje ensamblador... 2 Introducción... 2 UNIDADES DE INFORMACIÓN... 3 BIT... 3 BYTE... 3 NIBBLE...
2016 Lenguaje ensamblador Semana 2 Trabajando con el lenguaje ensamblador Contenido Trabajando con el lenguaje ensamblador... 2 Introducción... 2 UNIDADES DE INFORMACIÓN... 3 BIT... 3 BYTE... 3 NIBBLE...
SISTEMA DE NUMERACIÓN DECIMAL
 SISTEMA DE NUMERACIÓN DECIMAL La matemática es una gran ciencia! Todo es tan lógico y simple... El universo de los números se puede describir con sólo diez dígitos. No obstante, realmente tiene que ser
SISTEMA DE NUMERACIÓN DECIMAL La matemática es una gran ciencia! Todo es tan lógico y simple... El universo de los números se puede describir con sólo diez dígitos. No obstante, realmente tiene que ser
Programación de microcontroladores usos y aplicaciones. Desde Ensamblador a C.
 Programación de microcontroladores usos y aplicaciones. Desde Ensamblador a C. Familias 8-bit de Microchip: PIC10F, PIC12F, PIC16F y PIC18F /cursos/microchip/ Espinher Electróingeniería, S.A. de C.V. Ing.
Programación de microcontroladores usos y aplicaciones. Desde Ensamblador a C. Familias 8-bit de Microchip: PIC10F, PIC12F, PIC16F y PIC18F /cursos/microchip/ Espinher Electróingeniería, S.A. de C.V. Ing.
Tema 5. Presentación de datos por pantalla
 Tema 5. Presentación de datos por pantalla Laboratorio de Estructura de Computadores I. T. Informática de Gestión / Sistemas Curso 2008-2009 Transparencia: 2 / 24 Índice El registro de flags del i8086
Tema 5. Presentación de datos por pantalla Laboratorio de Estructura de Computadores I. T. Informática de Gestión / Sistemas Curso 2008-2009 Transparencia: 2 / 24 Índice El registro de flags del i8086
;*****************************************************************************************
 PROYECTO DPP Memoria Generalidades: Este es el proyecto de un sistema de camaras cerrado, concretamente de ocho camaras, controladas, desde un panel de mandos desde el cual controlaremos que camara queremos
PROYECTO DPP Memoria Generalidades: Este es el proyecto de un sistema de camaras cerrado, concretamente de ocho camaras, controladas, desde un panel de mandos desde el cual controlaremos que camara queremos
PIC MICRO ESTUDIO Reloj en tiempo real RTCU2 Clave: 719 www.electronicaestudio.com
 PIC MICRO ESTUDIO Reloj en tiempo real RTCU2 Clave: 719 www.electronicaestudio.com Guía de Operación Reloj en tiempo real Modulo: RTCU2iempo real Clave: 719 El modulo 719 Reloj en tiempo real- utiliza
PIC MICRO ESTUDIO Reloj en tiempo real RTCU2 Clave: 719 www.electronicaestudio.com Guía de Operación Reloj en tiempo real Modulo: RTCU2iempo real Clave: 719 El modulo 719 Reloj en tiempo real- utiliza
Proyecto de Microprocesadores I del CENT57 AFINADOR DIGITAL MICROPROCESADO Alumnos: Damian O. Macarrein Gastón M. Murphy Año 2002
 Proyecto de Microprocesadores I del CENT57 AFINADOR DIGITAL MICROPROCESADO Alumnos: Damian O. Macarrein Gastón M. Murphy Año 2002 Introducción Este afinador digital esta diseñado para la medición de frecuencia
Proyecto de Microprocesadores I del CENT57 AFINADOR DIGITAL MICROPROCESADO Alumnos: Damian O. Macarrein Gastón M. Murphy Año 2002 Introducción Este afinador digital esta diseñado para la medición de frecuencia
UNIDAD IV PROGRAMACION. Programación del microcontrolador
 UNIDAD IV PROGRAMACION Programación del microcontrolador Para grabar la memoria de programa el microcontrolador debe llevarse a un modo especial de trabajo suministrando 13.5V a la línea MCLR y el voltaje
UNIDAD IV PROGRAMACION Programación del microcontrolador Para grabar la memoria de programa el microcontrolador debe llevarse a un modo especial de trabajo suministrando 13.5V a la línea MCLR y el voltaje
HERRAMIENTA DE AUTOAPRENDIZAJE BASADO EN MICROCONTROLADOR OPERANDO EN LENGUAJE ENSAMBLADOR
 ESCUELA POLITÉCNICA SUPERIOR UNIVERSIDAD DE BURGOS HERRAMIENTA DE AUTOAPRENDIZAJE BASADO EN MICROCONTROLADOR OPERANDO EN LENGUAJE ENSAMBLADOR ADAPTACIÓN AL GRADO EN INGENIERÍA ELECTRÓNICA INDUSTRIAL Y
ESCUELA POLITÉCNICA SUPERIOR UNIVERSIDAD DE BURGOS HERRAMIENTA DE AUTOAPRENDIZAJE BASADO EN MICROCONTROLADOR OPERANDO EN LENGUAJE ENSAMBLADOR ADAPTACIÓN AL GRADO EN INGENIERÍA ELECTRÓNICA INDUSTRIAL Y
Tema 3: ASCII y operaciones de desplazamiento y lógicas
 Tema 3: ASCII y operaciones de desplazamiento y lógicas S Representación de cadenas de caracteres (alfanuméricas) S Operaciones de desplazamiento S Desplazamientos lógicos S Desplazamientos aritméticos
Tema 3: ASCII y operaciones de desplazamiento y lógicas S Representación de cadenas de caracteres (alfanuméricas) S Operaciones de desplazamiento S Desplazamientos lógicos S Desplazamientos aritméticos
Introducción a las sentencias de control
 INSTRUCCIONES DE CONTROL CONTENIDOS 1. Introducción a las sentencias de control. 2. Instrucciones o sentencias condicionales: IF, IF-ELSE, SWITCH. 3. Instrucciones o sentencias repetitivas o iterativas:
INSTRUCCIONES DE CONTROL CONTENIDOS 1. Introducción a las sentencias de control. 2. Instrucciones o sentencias condicionales: IF, IF-ELSE, SWITCH. 3. Instrucciones o sentencias repetitivas o iterativas:
DALCAME
 ;***************************************************************** ; ROGRAMA PARA CONTAR PULSOS DE LA ONDA QRS DE LA ONDA ECG ; DE LA PRIMERA DERIVACION BIPOLAR DE EINTHOVEN ; 23 de Marzo 2005 ; DALCAME
;***************************************************************** ; ROGRAMA PARA CONTAR PULSOS DE LA ONDA QRS DE LA ONDA ECG ; DE LA PRIMERA DERIVACION BIPOLAR DE EINTHOVEN ; 23 de Marzo 2005 ; DALCAME
Capítulo VIII: PROGRAMACIÓN DEL PIC 16F876A
 Capítulo VIII: PROGRAMACIÓN DEL PIC 16F876A Proyecto Fin de Carrera 95 Antonio Andújar Caballero 8. PROGRAMACIÓN DEL PIC 16F876A. A la hora de realizar el programa de control para nuestro ecualizador,
Capítulo VIII: PROGRAMACIÓN DEL PIC 16F876A Proyecto Fin de Carrera 95 Antonio Andújar Caballero 8. PROGRAMACIÓN DEL PIC 16F876A. A la hora de realizar el programa de control para nuestro ecualizador,
PIC MICRO ESTUDIO Temporizador con el 16F872 Guía de Uso
 PIC MICRO ESTUDIO Temporizador con el 16F872 www.electronicaestudio.com Guía de Uso Temporizador con el PIC16F872 Los temporizadores los encontramos en muchos lugares de nuestra vida diaria, generalmente
PIC MICRO ESTUDIO Temporizador con el 16F872 www.electronicaestudio.com Guía de Uso Temporizador con el PIC16F872 Los temporizadores los encontramos en muchos lugares de nuestra vida diaria, generalmente
APÉNDICE B APÉNDICE B. PROGRAMA DEL PIC16F874 EN LENGUAJE ENSAMBLADOR
 APÉNDICE B. PROGRAMA DEL PIC16F874 EN LENGUAJE ENSAMBLADOR INIAX EQU 0X20 INIBX EQU 0X21 INICX EQU 0X22 INIDX EQU 0X23 INIEY EQU 0X24 INIFY EQU 0X25 INIGY EQU 0X26 INIHY EQU 0X27 SELECCION EQU 0X28 APUNTADOR
APÉNDICE B. PROGRAMA DEL PIC16F874 EN LENGUAJE ENSAMBLADOR INIAX EQU 0X20 INIBX EQU 0X21 INICX EQU 0X22 INIDX EQU 0X23 INIEY EQU 0X24 INIFY EQU 0X25 INIGY EQU 0X26 INIHY EQU 0X27 SELECCION EQU 0X28 APUNTADOR
REGISTRO DE TEMPERATURA USANDO EL MICROCONTROLADOR PIC16C71. José González Flórez *, Eusebio García García ** Abstract
 UNIVERSIDAD PEDAGOGICA NACIONAL REGISTRO DE TEMPERATURA USANDO EL MICROCONTROLADOR PIC16C71 José González Flórez *, Eusebio García García ** Abstract A digital measurement temperature employs the PIC 16C71
UNIVERSIDAD PEDAGOGICA NACIONAL REGISTRO DE TEMPERATURA USANDO EL MICROCONTROLADOR PIC16C71 José González Flórez *, Eusebio García García ** Abstract A digital measurement temperature employs the PIC 16C71
Arquitectura de Computadores II Clase #3
 Clase #3 Facultad de Ingeniería Universidad de la República Instituto de Computación Curso 2010 Veremos Registros Repertorio de instrucciones Modos de direccionamiento El stack Formatos de datos Control
Clase #3 Facultad de Ingeniería Universidad de la República Instituto de Computación Curso 2010 Veremos Registros Repertorio de instrucciones Modos de direccionamiento El stack Formatos de datos Control
El único lenguaje que entienden los microcontroladores es el código máquina formado por ceros y unos del sistema binario.
 1 LENGUAJE ENSAMBLADOR El único lenguaje que entienden los microcontroladores es el código máquina formado por ceros y unos del sistema binario. El lenguaje ensamblador expresa las instrucciones de una
1 LENGUAJE ENSAMBLADOR El único lenguaje que entienden los microcontroladores es el código máquina formado por ceros y unos del sistema binario. El lenguaje ensamblador expresa las instrucciones de una
Indice. Escrito por Administrator Martes, 02 de Septiembre de 2008 17:45 - Actualizado Domingo, 20 de Septiembre de 2009 07:45 1 / 15
 1 / 15 El contenido del libro " MICROCONTROLADOR PIC16F84. Desarrollo de proyectos " de la Editorial Ra CAPÍTULOS: 1. MICROCONTROLADOR PIC16F84 2. PERIFÉRICOS BÁSICOS 3. GRABACIÓN DE MICROCONTROLADORES
1 / 15 El contenido del libro " MICROCONTROLADOR PIC16F84. Desarrollo de proyectos " de la Editorial Ra CAPÍTULOS: 1. MICROCONTROLADOR PIC16F84 2. PERIFÉRICOS BÁSICOS 3. GRABACIÓN DE MICROCONTROLADORES
CODIGO EN ASSEMBLER TRANSMISOR. list p=16f876 ;selecion de pic
 TRANSMISOR CODIGO EN ASSEMBLER list p=16f876 ;selecion de pic radix hex ; codigo hex indf equ 0h ;direcionamiento indirecto tmro equ 1h ;contador de tiempo real pc equ 2h ;contador del programa status
TRANSMISOR CODIGO EN ASSEMBLER list p=16f876 ;selecion de pic radix hex ; codigo hex indf equ 0h ;direcionamiento indirecto tmro equ 1h ;contador de tiempo real pc equ 2h ;contador del programa status
CONCEPTOS BÁSICOS. + Intensidad
 CONCEPTOS BÁSICOS Si en una frase tuviera que definir que es un microcontrolador, creo que lo más acertado sería definirlo como un controlador de entrada/ salida con capacidad de decisión. Para poder explicar
CONCEPTOS BÁSICOS Si en una frase tuviera que definir que es un microcontrolador, creo que lo más acertado sería definirlo como un controlador de entrada/ salida con capacidad de decisión. Para poder explicar
Contenido: CAPITULO 1 Introducción a los microcontroladores ( Microcontroladores PIC de Microchip) CAPITULO 2 Programación en lenguaje ensamblador CAP
 CAPITULO 2 Programación en lenguaje ensamblador CAP") MANUAL DE MICROCONTROLADORES PIC Contenido: CAPITULO 1 Introducción a los microcontroladores ( Microcontroladores PIC de Microchip) CAPITULO 2 Programación en lenguaje ensamblador CAPITULO 3 Técnicas en
MANUAL DE MICROCONTROLADORES PIC Contenido: CAPITULO 1 Introducción a los microcontroladores ( Microcontroladores PIC de Microchip) CAPITULO 2 Programación en lenguaje ensamblador CAPITULO 3 Técnicas en
INDICE. Introduction a los microcontroladores Ejemplo de microcontrolador minimalista: PIC10F200 El microcontrolador ARM7 LPC2103
 INDICE Introduction a los microcontroladores Ejemplo de microcontrolador minimalista: PIC10F200 El microcontrolador ARM7 LPC2103 Microcontroladores Idea «SoC»: Computador en un solo chip Posible si la
INDICE Introduction a los microcontroladores Ejemplo de microcontrolador minimalista: PIC10F200 El microcontrolador ARM7 LPC2103 Microcontroladores Idea «SoC»: Computador en un solo chip Posible si la
1.- INTRODUCCIÓN AL PIC16F84
 1.- INTRODUCCIÓN AL PIC16F84 En esta sección se resumen brevemente las principales características y forma de uso de las herramientas de desarrollo que serán utilizadas durante las prácticas. El contenido
1.- INTRODUCCIÓN AL PIC16F84 En esta sección se resumen brevemente las principales características y forma de uso de las herramientas de desarrollo que serán utilizadas durante las prácticas. El contenido
Asignatura de Organización de Computadoras. Alberto Hernández Cerezo. Cristian Tejedor García. Rodrigo Alonso Iglesias. Universidad de Valladolid
 Asignatura de Organización de Computadoras ARQUITECTURA MIPS SEGUNDO TRABAJO Alberto Hernández Cerezo Cristian Tejedor García Rodrigo Alonso Iglesias Universidad de Valladolid Segundo de Ingeniería Técnica
Asignatura de Organización de Computadoras ARQUITECTURA MIPS SEGUNDO TRABAJO Alberto Hernández Cerezo Cristian Tejedor García Rodrigo Alonso Iglesias Universidad de Valladolid Segundo de Ingeniería Técnica
- FUNDAMENTOS TEÓRICOS - EJEMPLOS DE APLICACIÓN. 09/01/2009 Ing. José A. Picón - - (0416)
") MICROPROCESADORES Y MICROCONTROLADORES - FUNDAMENTOS TEÓRICOS - EJEMPLOS DE APLICACIÓN 09/01/2009 Ing. José A. Picón - www.joseapicon.com.ve - (0416) 9519990 Informes de Laboratorio Entregar informe con
MICROPROCESADORES Y MICROCONTROLADORES - FUNDAMENTOS TEÓRICOS - EJEMPLOS DE APLICACIÓN 09/01/2009 Ing. José A. Picón - www.joseapicon.com.ve - (0416) 9519990 Informes de Laboratorio Entregar informe con
INSTRUCCIONES CONDICIONALES
 INSTRUCCIONES CONDICIONALES Objetivos Los objetivos que se pretenden alcanzar en este recurso son los siguientes: Aprender cuáles son los mecanismos de ejecución de código no secuencial. Definir las instrucciones
INSTRUCCIONES CONDICIONALES Objetivos Los objetivos que se pretenden alcanzar en este recurso son los siguientes: Aprender cuáles son los mecanismos de ejecución de código no secuencial. Definir las instrucciones
Uso de centinelas para la toma de decisiones. Esquemas y diagramas de flujo. Ejemplos resueltos. (CU00167A)
") aprenderaprogramar.com Uso de centinelas para la toma de decisiones. Esquemas y diagramas de flujo. Ejemplos resueltos. (CU00167A) Sección: Cursos Categoría: Curso Bases de la programación Nivel I Fecha
aprenderaprogramar.com Uso de centinelas para la toma de decisiones. Esquemas y diagramas de flujo. Ejemplos resueltos. (CU00167A) Sección: Cursos Categoría: Curso Bases de la programación Nivel I Fecha
Microcontroladores PIC
 Introducción Los microcontroladores son procesadores que poseen memoria y dispositivo de entrada salida todo encapsulado en un mismo integrado, lo que permite su uso sin la necesidad de estar disponiendo
Introducción Los microcontroladores son procesadores que poseen memoria y dispositivo de entrada salida todo encapsulado en un mismo integrado, lo que permite su uso sin la necesidad de estar disponiendo
O B J E T I V O I N T R O D U C C I O N M A R C O T E O R I C O
 O B J E T I V O Realizar un contador decimal que se exhiba en un display de 7 segmentos, cada número deberá estar exhibido durante un segundo. I N T R O D U C C I O N En la mayoría de los sistemas electrónicos
O B J E T I V O Realizar un contador decimal que se exhiba en un display de 7 segmentos, cada número deberá estar exhibido durante un segundo. I N T R O D U C C I O N En la mayoría de los sistemas electrónicos
Termostato electrónico con PIC y LCD
 COMETARIO TECNICO Termostato electrónico con PIC y LCD Por el Departamento de Ingeniería de Electrónica Elemon S.A. 1N4148 El circuito centra su funcionamiento en el micro controlador PIC16F870 el cual
COMETARIO TECNICO Termostato electrónico con PIC y LCD Por el Departamento de Ingeniería de Electrónica Elemon S.A. 1N4148 El circuito centra su funcionamiento en el micro controlador PIC16F870 el cual
PRÁCTICA 6: Gobierno del display 7 segmentos
 SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 6: Gobierno del display 7 segmentos Display 7 segmentos - 1 - Ingeniería de Sistemas y Automática 1. Objetivos: Gobierno
SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 6: Gobierno del display 7 segmentos Display 7 segmentos - 1 - Ingeniería de Sistemas y Automática 1. Objetivos: Gobierno
PIC s 1ª PARTE RESUMEN Y EJERCICIOS_06/07
 PIC s 1ª PARTE RESUMEN Y EJERCICIOS_06/07 INDICE 1-Microcontroladores, arquitectura PIC. 2-Hardware PIC 16f84. Bancos de registros. 3-Grabación del PIC. Listado Instrucciones 4-Líneas de I/O del PIC 5-Directivas
PIC s 1ª PARTE RESUMEN Y EJERCICIOS_06/07 INDICE 1-Microcontroladores, arquitectura PIC. 2-Hardware PIC 16f84. Bancos de registros. 3-Grabación del PIC. Listado Instrucciones 4-Líneas de I/O del PIC 5-Directivas
Figura 1 Diversos microcontroladores PIC.
 CAPÍTULO I. RUTINAS BÁSICAS 1.1 CONFIGURACIÓN DE LOS PUERTOS COMO ENTRADA O SALIDA El primer ejercicio que se realiza con un microcontrolador es la de leer o escribir datos discretos (digitales) a través
CAPÍTULO I. RUTINAS BÁSICAS 1.1 CONFIGURACIÓN DE LOS PUERTOS COMO ENTRADA O SALIDA El primer ejercicio que se realiza con un microcontrolador es la de leer o escribir datos discretos (digitales) a través
PROBLEMAS TEMA 1: Estructuras de interconexión de un computador
 PROBLEMAS TEMA 1: Estructuras de interconexión de un computador Problemas propuestos en examen PROBLEMA 1. Una CPU que emplea un tamaño de palabra de 16 bits tiene un repertorio de 16 instrucciones con
PROBLEMAS TEMA 1: Estructuras de interconexión de un computador Problemas propuestos en examen PROBLEMA 1. Una CPU que emplea un tamaño de palabra de 16 bits tiene un repertorio de 16 instrucciones con
Microcontrolador PIC 16F84
 INTRODUCCIÓN A LA PROGRAMACIÓN Microcontrolador PIC 16F84 mail : enric.serra 0 - INTRODUCCIÓN. Este documento es una introducción a la programación del PIC 16f84. Este documento se puede copiar y utilizar
INTRODUCCIÓN A LA PROGRAMACIÓN Microcontrolador PIC 16F84 mail : enric.serra 0 - INTRODUCCIÓN. Este documento es una introducción a la programación del PIC 16f84. Este documento se puede copiar y utilizar
Tema 4. Estructura de un ordenador elemental
 Tema 4. Estructura de un ordenador elemental 4.1. Codicación interna de la información 4.2. Estructura funcional de un ordenador Arquitectura von Neumann Unidades funcionales Conexiones entre unidades
Tema 4. Estructura de un ordenador elemental 4.1. Codicación interna de la información 4.2. Estructura funcional de un ordenador Arquitectura von Neumann Unidades funcionales Conexiones entre unidades
Tema 6: Microcontroladores
 Tema 6: Microcontroladores Carlos Garre del Olmo 1 Microcontroladores Contenidos Introducción a los microcontroladores. Principales familias y sus características. La familia PIC16. Programación de microcontroladores.
Tema 6: Microcontroladores Carlos Garre del Olmo 1 Microcontroladores Contenidos Introducción a los microcontroladores. Principales familias y sus características. La familia PIC16. Programación de microcontroladores.
CODIGO EN ASSEMBLER ;************************************************************************
 RECEPTOR CODIGO EN ASSEMBLER ;************************************************************************ list p=16f84a ;selecion de pic radix hex ; codigo hex pc equ 02h status equ 03h portb equ 06h PORTA
RECEPTOR CODIGO EN ASSEMBLER ;************************************************************************ list p=16f84a ;selecion de pic radix hex ; codigo hex pc equ 02h status equ 03h portb equ 06h PORTA
Apéndice A. Programas y Diagramas de Bloques para los Microprocesadores
 Apéndice A Programas y Diagramas de Bloques para los Microprocesadores 120 Microprocesador PIC16F84A (Transmisor): Figura A.1 Diagrama de bloques del PIC16F84A en transmisor ;***********************************Transmisor.asm********************************
Apéndice A Programas y Diagramas de Bloques para los Microprocesadores 120 Microprocesador PIC16F84A (Transmisor): Figura A.1 Diagrama de bloques del PIC16F84A en transmisor ;***********************************Transmisor.asm********************************
CAPITULO 3: OPERADORES.
 CAPITULO 3: OPERADORES.. OPERADORES ARITMETICOS. Los operadores aritméticos comprenden las operaciones básicas: la suma (+), la resta (-), la multiplicación (*), la división (/) y el operador módulo (%).
CAPITULO 3: OPERADORES.. OPERADORES ARITMETICOS. Los operadores aritméticos comprenden las operaciones básicas: la suma (+), la resta (-), la multiplicación (*), la división (/) y el operador módulo (%).
PRÁCTICA N 5 LABORATORIO DE SISTEMAS MICROPROCESADOS
 FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control Carrera de Ingeniería Electrónica y Telecomunicaciones Carrera de Ingeniería Electrónica y Redes de Información
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control Carrera de Ingeniería Electrónica y Telecomunicaciones Carrera de Ingeniería Electrónica y Redes de Información
PIC 16F87X. Juan González. Escuela Politécnica Superior Universidad Autónoma de Madrid. Flir Networked Systems. Flir Networked Systems
 PIC 16F87X Juan González Andrés Prieto-Moreno Ricardo Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Flir Networked Systems Flir Networked Systems Curso de microcontroladores PIC. Semana
PIC 16F87X Juan González Andrés Prieto-Moreno Ricardo Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Flir Networked Systems Flir Networked Systems Curso de microcontroladores PIC. Semana
Palabras reservadas de C++ y C. Una palabra reservada no puede declararse como un identificador, esto haría un conflicto entre conectores y funciones.
 Palabras reservadas de C++ y C Una palabra reservada no puede declararse como un identificador, esto haría un conflicto entre conectores y funciones. A continuación se muestra el link del listado de palabras
Palabras reservadas de C++ y C Una palabra reservada no puede declararse como un identificador, esto haría un conflicto entre conectores y funciones. A continuación se muestra el link del listado de palabras
CONCEPTOS BÁSICOS DE PROGRAMACIÓN
 III) PROGRAMACIÓN El programa es la solución a un problema donde se quiere aplicar el micro. El diseño de un programa para un micro parte de un diagrama de flujo. Éste expresa la solución a aplicar. De
III) PROGRAMACIÓN El programa es la solución a un problema donde se quiere aplicar el micro. El diseño de un programa para un micro parte de un diagrama de flujo. Éste expresa la solución a aplicar. De
D:\ACCESO\ACCESO.ASM. list p=16f877 include "p16f877.inc" ROTA equ 0x20 TEMP equ 0x21 TECLA equ 0x22 DIGITOS equ 0x23 DIR equ 0x24
 ;Programa para el control de acceso a un sistema X ;mediante la introducción de una clave a través de un teclado ;matricial. ;Es posible cambiar la clave de acceso y guardarla en la EEPROM ;La velocidad
;Programa para el control de acceso a un sistema X ;mediante la introducción de una clave a través de un teclado ;matricial. ;Es posible cambiar la clave de acceso y guardarla en la EEPROM ;La velocidad
Programación en PIC Los primeros pasos
 Capítulo V Programación en PIC Los primeros pasos Encender y apagar un LED Secuenciador con cuatro LED's Leer los pulsadores y encender el LED correspondiente Programa avanzado utilizando el entrenador
Capítulo V Programación en PIC Los primeros pasos Encender y apagar un LED Secuenciador con cuatro LED's Leer los pulsadores y encender el LED correspondiente Programa avanzado utilizando el entrenador
;<<<<<< VECTOR DE INTERRUPCION >>>>>>>
 Apéndice B Programa en Ensamblador para el PIC 16F877 de Microchip Corp. ;***********************************UDLAP************************** ; PROGRAMA : com232.asm ; Función : Establece la rutina de los
Apéndice B Programa en Ensamblador para el PIC 16F877 de Microchip Corp. ;***********************************UDLAP************************** ; PROGRAMA : com232.asm ; Función : Establece la rutina de los
Qué es # DIV/0! y cómo evito que aparezca?
 ERRORES EN EXCEL Qué es # DIV/0! y cómo evito que aparezca? Qué es ###### y cómo evito que aparezca? Qué es # VALOR! y cómo evito que aparezca? Qué es #N/A? Qué es # DIV/0! y cómo evito que aparezca? Cada
ERRORES EN EXCEL Qué es # DIV/0! y cómo evito que aparezca? Qué es ###### y cómo evito que aparezca? Qué es # VALOR! y cómo evito que aparezca? Qué es #N/A? Qué es # DIV/0! y cómo evito que aparezca? Cada
Programación y Aplicaciones de los Microcontroladores PIC16FXXX (Nivel Básico) ING. EULER DEZA FIGUEROA
 ING. EULER DEZA FIGUEROA") Programación y Aplicaciones de los Microcontroladores PIC16FXXX (Nivel Básico) ING. EULER DEZA FIGUEROA ESTRUCTURA Y CONTENIDO: SESIONES DE CLASE CONTENIDOS PRACTICA PRIMERA (5 horas ) SEGUNDA (5 horas
Programación y Aplicaciones de los Microcontroladores PIC16FXXX (Nivel Básico) ING. EULER DEZA FIGUEROA ESTRUCTURA Y CONTENIDO: SESIONES DE CLASE CONTENIDOS PRACTICA PRIMERA (5 horas ) SEGUNDA (5 horas
PROGRAMACIÓN DEL MICROCONTROLADOR PIC 16C64 COMO CONTROLADOR MULTIEJE PARA MOTORES PASO
 PROGRAMACIÓN DEL MICROCONTROLADOR PIC 16C64 COMO CONTROLADOR MULTIEJE PARA MOTORES PASO. Gustavo Caamaño* ; Coordinador de Tecnología en Electrónica En este artículo se describe la programación de un PIC
PROGRAMACIÓN DEL MICROCONTROLADOR PIC 16C64 COMO CONTROLADOR MULTIEJE PARA MOTORES PASO. Gustavo Caamaño* ; Coordinador de Tecnología en Electrónica En este artículo se describe la programación de un PIC
Límites e indeterminaciones
 Límites e indeterminaciones La idea de límite de una función no es en sí complicada, pero hubo que esperar hasta el siglo XVII a que los matemáticos Newton 1 y Leibniz 2 le dieran forma y la convirtiesen
Límites e indeterminaciones La idea de límite de una función no es en sí complicada, pero hubo que esperar hasta el siglo XVII a que los matemáticos Newton 1 y Leibniz 2 le dieran forma y la convirtiesen
[CURSO BÁSICO DE PIC RETARDOS POR SOFTWARE]
![[CURSO BÁSICO DE PIC RETARDOS POR SOFTWARE]](/thumbs/62/48083477.jpg "[CURSO BÁSICO DE PIC RETARDOS POR SOFTWARE]") 2009 GRUPO ESTUDIANTIL INVENTRONICA Joel Oswaldo Campos Pérez [CURSO BÁSICO DE PIC RETARDOS POR SOFTWARE] En este segmento se abordara el tema de retardos por software en ensamblador, se aprenderá la estructura
2009 GRUPO ESTUDIANTIL INVENTRONICA Joel Oswaldo Campos Pérez [CURSO BÁSICO DE PIC RETARDOS POR SOFTWARE] En este segmento se abordara el tema de retardos por software en ensamblador, se aprenderá la estructura
PRÁCTICA N 5 LABORATORIO DE SISTEMAS MICROPROCESADOS
 FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control Carrera de Ingeniería Electrónica y Telecomunicaciones Carrera de Ingeniería Electrónica y Redes de Información
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control Carrera de Ingeniería Electrónica y Telecomunicaciones Carrera de Ingeniería Electrónica y Redes de Información
TEMA 5 LA MEMORIA DE DATOS MEMORIA RAM D.P.E. DESARROLLO DE PROYECTOS 1
 TEMA 5 LA MEMORIA DE DATOS MEMORIA RAM D.P.E. DESARROLLO DE PROYECTOS 1 Estructura De La Memoria Ram (1) La memoria de datos RAM está dividida en dos partes diferenciadas: 1.- Zona SFR o zona de Registros
TEMA 5 LA MEMORIA DE DATOS MEMORIA RAM D.P.E. DESARROLLO DE PROYECTOS 1 Estructura De La Memoria Ram (1) La memoria de datos RAM está dividida en dos partes diferenciadas: 1.- Zona SFR o zona de Registros
Lección 8: Potencias con exponentes enteros
 GUÍA DE MATEMÁTICAS III Lección 8: Potencias con exponentes enteros Cuando queremos indicar productos de factores iguales, generalmente usamos la notación exponencial. Por ejemplo podemos expresar x, como
GUÍA DE MATEMÁTICAS III Lección 8: Potencias con exponentes enteros Cuando queremos indicar productos de factores iguales, generalmente usamos la notación exponencial. Por ejemplo podemos expresar x, como
SISTEMAS ELECTRÓNICOS DIGITALES E.T.S.I. TELECOMUNICACIÓN UNIVERSIDAD DE VALLADOLID
 SISTEMAS ELECTRÓNICOS DIGITALES E.T.S.I. TELECOMUNICACIÓN UNIVERSIDAD DE VALLADOLID Examen ordinario: 1 de febrero de. Problema 1 Hemos visto e implementado, en la parte práctica de la asignatura, cómo
SISTEMAS ELECTRÓNICOS DIGITALES E.T.S.I. TELECOMUNICACIÓN UNIVERSIDAD DE VALLADOLID Examen ordinario: 1 de febrero de. Problema 1 Hemos visto e implementado, en la parte práctica de la asignatura, cómo
TIPOS DE DATOS BASICOS EN LENGUAJE C
 TIPOS DE DATOS BASICOS EN LENGUAJE C TIPO char int float double void ANCHO EN BIT 64 0 TIPOS DE DATOS RANGO EN PC -12 a 127-76 a 767 3.4E-3 a 3.4E+3 1.7E-30 a 1.7E+30 sin valores TIPO ANCHO EN BIT RANGO
TIPOS DE DATOS BASICOS EN LENGUAJE C TIPO char int float double void ANCHO EN BIT 64 0 TIPOS DE DATOS RANGO EN PC -12 a 127-76 a 767 3.4E-3 a 3.4E+3 1.7E-30 a 1.7E+30 sin valores TIPO ANCHO EN BIT RANGO
Jesús Alberto Díaz Carmona Ingeniería en Informática. Curso 2005/06. Diseño de Sistemas Basados en Microprocesador
 Jesús Alberto Díaz Carmona Ingeniería en Informática. Curso 2005/06. Diseño de Sistemas Basados en Microprocesador Descripción El proyecto se trata de un sistema de cámaras de vigilancia en circuito cerrado,
Jesús Alberto Díaz Carmona Ingeniería en Informática. Curso 2005/06. Diseño de Sistemas Basados en Microprocesador Descripción El proyecto se trata de un sistema de cámaras de vigilancia en circuito cerrado,
Clase adicional 2. Estructuras básicas de control. Temas
 Clase adicional 2 Temas Estructuras de control Sentencia condicional Iteración Clases Definir una clase Crear una instancia de una clase Campos estáticos Problemas de la clase adicional Problema de diseño
Clase adicional 2 Temas Estructuras de control Sentencia condicional Iteración Clases Definir una clase Crear una instancia de una clase Campos estáticos Problemas de la clase adicional Problema de diseño
TIPOS DE BUCLES O CICLOS DE REPETICIÓN EN PHP: WHILE, DO WHILE Y FOR. EJEMPLOS Y EJERCICIOS RESUELTOS. (CU00822B)
") APRENDERAPROGRAMAR.COM TIPOS DE BUCLES O CICLOS DE REPETICIÓN EN PHP: WHILE, DO WHILE Y FOR. EJEMPLOS Y EJERCICIOS RESUELTOS. (CU00822B) Sección: Cursos Categoría: Tutorial básico del programador web:
APRENDERAPROGRAMAR.COM TIPOS DE BUCLES O CICLOS DE REPETICIÓN EN PHP: WHILE, DO WHILE Y FOR. EJEMPLOS Y EJERCICIOS RESUELTOS. (CU00822B) Sección: Cursos Categoría: Tutorial básico del programador web:
Control de pantallas de cristal líquido mediante PIC
 INGENIERÍA Control de pantallas de cristal líquido mediante PIC Ejemplo práctico de interconexión y control de una pantalla de cristal líquido (LCD) por un microcontrolador PIC CELESTINO BENÍTEZ VÁZQUEZ
INGENIERÍA Control de pantallas de cristal líquido mediante PIC Ejemplo práctico de interconexión y control de una pantalla de cristal líquido (LCD) por un microcontrolador PIC CELESTINO BENÍTEZ VÁZQUEZ
Práctica final. Emilia Cruz Fernández Martínez
 Guadalinex Práctica final Curso 2003/2004 Emilia Cruz Fernández Martínez Desarrollo de una unidad didáctica usando software libre ELEMENTOS FUNCIONALES DE UN ORDENADOR Qué es un ordenador? Es un dispositivo
Guadalinex Práctica final Curso 2003/2004 Emilia Cruz Fernández Martínez Desarrollo de una unidad didáctica usando software libre ELEMENTOS FUNCIONALES DE UN ORDENADOR Qué es un ordenador? Es un dispositivo
MICROCONTROLADOR PIC DE MICROCHIP
 MICROCONTROLADOR PIC DE MICROCHIP Sistema Microprocesador (varios C.I. en una PCB) Microcontrolador (único C.I.) MICROCONTROLADOR PIC DE MICROCHIP PIC16F877-28-PIN 8-BIT CMOS FLASH MICROCONTROLLER Manuel
MICROCONTROLADOR PIC DE MICROCHIP Sistema Microprocesador (varios C.I. en una PCB) Microcontrolador (único C.I.) MICROCONTROLADOR PIC DE MICROCHIP PIC16F877-28-PIN 8-BIT CMOS FLASH MICROCONTROLLER Manuel
Start. Start. LSB MSB 9º bit LSB. Stop. Start. Stop. Start. La USART contiene un circuito generador de baudios
 (A)USAT (o SCI) Características: Uno de los periféricos de comunicación serie de los PIC6CXXX, además del SSP USAT = Universal Synchronous Asynchronous eceiver Transmitter (SCI = Serial Comunication Interface)
(A)USAT (o SCI) Características: Uno de los periféricos de comunicación serie de los PIC6CXXX, además del SSP USAT = Universal Synchronous Asynchronous eceiver Transmitter (SCI = Serial Comunication Interface)
2.1. Código ASM de Programación para el PIC
 2.1. Código ASM de Programación para el PIC PROGRAMA PARA MOVER UNA ARAÑA SEGUN 3 POSICIONES DE LUZ, CON ESTO SE PUEDE HACER QUE CON ALGUNA COMBINACION AVANCE, SE DETENGA, GIRE ALA IZQUIERDA, GIRE A LA
2.1. Código ASM de Programación para el PIC PROGRAMA PARA MOVER UNA ARAÑA SEGUN 3 POSICIONES DE LUZ, CON ESTO SE PUEDE HACER QUE CON ALGUNA COMBINACION AVANCE, SE DETENGA, GIRE ALA IZQUIERDA, GIRE A LA
Laboratorio de Arquitectura de Redes. Sentencias de control en lenguaje C
 Laboratorio de Arquitectura de Redes Sentencias de control en lenguaje C Sentencias de control en lenguaje C Introducción Sentencia if-else Sentencia switch Sentencia while Sentencia do-while Sentencia
Laboratorio de Arquitectura de Redes Sentencias de control en lenguaje C Sentencias de control en lenguaje C Introducción Sentencia if-else Sentencia switch Sentencia while Sentencia do-while Sentencia
SISTEMAS ELECTRONICOS DIGITALES DIRECCIONAMIENTO DE REGISTROS
 SISTEMAS ELECTRONICOS DIGITALES DIRECCIONAMIENTO DE REGISTROS Las líneas de entrada-salida digitales del PIC16X84 llamadas puertas(puertos), PUERTA A Y PUERTA B, que se denominan PA y PB. En este caso
SISTEMAS ELECTRONICOS DIGITALES DIRECCIONAMIENTO DE REGISTROS Las líneas de entrada-salida digitales del PIC16X84 llamadas puertas(puertos), PUERTA A Y PUERTA B, que se denominan PA y PB. En este caso
MANUAL DE MICROCONTROLADORES PIC
 MANUAL DE MICROCONTROLADORES PIC Contenido: CAPITULO 1 Introducción a los microcontroladores ( Microcontroladores PIC de Microchip) CAPITULO 2 Programación en lenguaje ensamblador CAPITULO 3 Técnicas en
MANUAL DE MICROCONTROLADORES PIC Contenido: CAPITULO 1 Introducción a los microcontroladores ( Microcontroladores PIC de Microchip) CAPITULO 2 Programación en lenguaje ensamblador CAPITULO 3 Técnicas en
Informática Ingeniería en Electrónica y Automática Industrial
 Informática Ingeniería en Electrónica y Automática Industrial Sentencias de control en lenguaje Sentencias de control en lenguaje Introducción Sentencia if-else Sentencia switch Sentencia while Sentencia
Informática Ingeniería en Electrónica y Automática Industrial Sentencias de control en lenguaje Sentencias de control en lenguaje Introducción Sentencia if-else Sentencia switch Sentencia while Sentencia
[CURSO BÁSICO DE PIC TABLAS]
![[CURSO BÁSICO DE PIC TABLAS]](/thumbs/54/33375030.jpg "[CURSO BÁSICO DE PIC TABLAS]") 2009 GRUPO ESTUDIANTIL INVENTRONICA Joel Oswaldo Campos Pérez [CURSO BÁSICO DE PIC ] En esta sección explicaremos que son las tablas, para que se usan y como se hacen. Se describe un ejercicio completo
2009 GRUPO ESTUDIANTIL INVENTRONICA Joel Oswaldo Campos Pérez [CURSO BÁSICO DE PIC ] En esta sección explicaremos que son las tablas, para que se usan y como se hacen. Se describe un ejercicio completo
Sistemas con Microprocesadores I
 Sistemas con Microprocesadores I 1 El ambiente de desarrollo MPLAB IDE El Entorno MPLAB IDE Creando código de usuario Creando un Proyecto Selección del Dispositivo y ventana de salida Selección de herramientas
Sistemas con Microprocesadores I 1 El ambiente de desarrollo MPLAB IDE El Entorno MPLAB IDE Creando código de usuario Creando un Proyecto Selección del Dispositivo y ventana de salida Selección de herramientas
Manejo de Entrada-Salida. Arquitectura de Computadoras
 Manejo de Entrada-Salida Arquitectura de Computadoras Agenda 1.2.3.1Módulos de entrada/salida. 1.2.3.2Entrada/salida programada. 1.2.3.3Entrada/salida mediante interrupciones. 1.2.3.4Acceso directo a memoria.
Manejo de Entrada-Salida Arquitectura de Computadoras Agenda 1.2.3.1Módulos de entrada/salida. 1.2.3.2Entrada/salida programada. 1.2.3.3Entrada/salida mediante interrupciones. 1.2.3.4Acceso directo a memoria.
MICROPROCESADORES 2003/2004 DADO ELECTRÓNICO. Jaime Pérez Crespo Rubén Seijas Valverde
 MICROPROCESADORES 2003/2004 DADO ELECTRÓNICO Jaime Pérez Crespo Rubén Seijas Valverde Introducción: Con esta práctica se pretende familiarizarse con la programación en ensamblador de microcontroladores
MICROPROCESADORES 2003/2004 DADO ELECTRÓNICO Jaime Pérez Crespo Rubén Seijas Valverde Introducción: Con esta práctica se pretende familiarizarse con la programación en ensamblador de microcontroladores
Bus de direcciones. Bus de datos
 1) INTRODUCCIÓN A LA MÁQUINA SENCILLA La máquina sencilla (MS) es un computador concebido para fines exclusivamente didácticos. MS sólo dispone de dos bloques: Unidad Central de Proceso y memoria principal.
1) INTRODUCCIÓN A LA MÁQUINA SENCILLA La máquina sencilla (MS) es un computador concebido para fines exclusivamente didácticos. MS sólo dispone de dos bloques: Unidad Central de Proceso y memoria principal.
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA INGENIERIA EN COMUNICACIONES Y ELECTRÓNICA ACADEMIA DE COMPUTACIÓN
 INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA UNIDAD CULHUACAN INGENIERIA EN COMUNICACIONES Y ELECTRÓNICA ACADEMIA DE COMPUTACIÓN LABORATORIO DE CIRCUITOS DIGITALES
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA UNIDAD CULHUACAN INGENIERIA EN COMUNICACIONES Y ELECTRÓNICA ACADEMIA DE COMPUTACIÓN LABORATORIO DE CIRCUITOS DIGITALES
PRÁCTICA 5 DIRECCIONAMIENTO INDIRECTO Y TECLADO MATRICIAL
 Direccionamiento Indirecto y Teclado Matricial 55 PRÁCTICA 5 DIRECCIONAMIENTO INDIRECTO Y TECLADO MATRICIAL OBJETIVO: Identificar la forma de operar del modo de direccionamiento indirecto. Analizar el
Direccionamiento Indirecto y Teclado Matricial 55 PRÁCTICA 5 DIRECCIONAMIENTO INDIRECTO Y TECLADO MATRICIAL OBJETIVO: Identificar la forma de operar del modo de direccionamiento indirecto. Analizar el