Arquitectura y Periféricos
|
|
|
- Blanca María Pilar San Martín Valdéz
- hace 5 años
- Vistas:
Transcripción
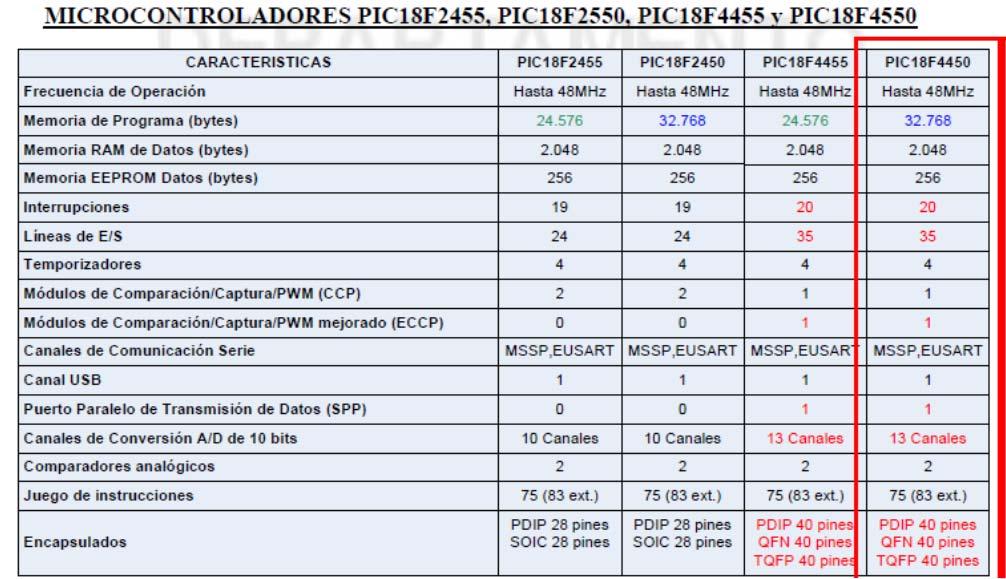
1 Arquitectura y Periféricos Departamento de Electrónica Fundación San Valero Características fundamentales: Arquitectura RISC avanzada Harvard: 16- bit con 8- bit de datos. 77 instrucciones Desde 18 a 80 pines. Operación a 2 o 5,5V Hasta 64K bytes de programa (hasta 2 Mbytes en ROMless) Multiplicador Hardware 8x8 Hasta 3968 bytes de RAM y 1KBytes de EEPROM Frecuencia máxima de reloj 40Mhz. Hasta 10 MIPS. Divisor de oscilador programable por software Pila de 32 niveles. Múltiples fuentes de interrupción Periféricos de comunicación avanzados (CAN y USB) 1

2 2

3 ORGANIZACIÓN DE MEMORIA: El uc F4550 dispone de las siguientes memorias: Memoria de programa: memoria flash interna de bytes Almacena instrucciones y constantes/datos Puede ser escrita/leída mediante un programador externo o durante la ejecución programa mediante unos punteros. Memoria RAM de datos: memoria SRAM interna de 2048 bytes en la que están incluidos los registros de función especial. Almacena datos de forma temporal durante la ejecución del programa Puede ser escrita/leída en tiempo de ejecución mediante diversas instrucciones Memoria EEPROM de datos: memoria no volátil de 256 bytes. Almacena datos que se deben conservar aun en ausencia de tensión de alimentación Puede ser escrita/leída en tiempo de ejecución a través de registros Pila: bloque de 31 palabras de 21 bits Almacena la dirección de la instrucción que debe ser ejecutada después de una interrupción o subrutina Memoria de configuración: memoria en la que se incluyen los bits de configuración (12 bytes de memoria flash) y los registros de identificación (2 bytes de memoria de solo lectura). 3

4 MEMORIA DE CONFIGURACION: Se trata de un bloque de memoria situado a partir de la posición 30000H de memoria de programa (más allá de la zona de memoria de programa de usuario). En esta memoria de configuración se incluyen: Bits de configuración: contenidos en 12 bytes de memoria flash permiten la configuración de algunas opciones del uc como: Opciones del oscilador Opciones de reset Opciones del watchdog Opciones de la circuiteria de depuración y programación Opciones de protección contra escritura de memoria de programa y memoria EEPROM de datos Estos bits se configuran generalmente durante la programación del uc, aunque también pueden ser leídos y modificados durante la ejecución del programa. El uc F4550 dispone de una serie de Unidades Funcionales que le permiten: Realizar tareas específicas especializadas (conversion A/D, transmisión/recepción de datos, generación de señales digitales con temporizaciones programables, etc...) Optimizar el rendimiento del uc, ya que estas unidades trabajan en paralelo a la CPU permitiendo que ésta se centre en otras tareas como procesado de datos, cálculos, movimiento de datos, etc... Las Unidades Funcionales más importantes del uc F4550 son: 4
/ entrada de comparación (C1IN-) RA1: entrada analógica (AN1)/ entrada de comparación (C2IN-) RA2: entrada analógica (AN2)/ entrada de")
5 PUERTO A: Dispone de 7 líneas de E/S. Las funciones alternativas son: RA0: entrada analógica (AN0)/ entrada de comparación (C1IN-) RA1: entrada analógica (AN1)/ entrada de comparación (C2IN-) RA2: entrada analógica (AN2)/ entrada de comparación (C2IN+) RA3: entrada analógica (AN3)/ entrada de comparación (C1IN+) RA4: entrada de reloj del Temporizador 0 (T0CKI)/salida de comparación (C1OUT) RA5: entrada analógica (AN4)/ salida de comparación (C2OUT)/HLVDIN entrada de detección de tensión alta/baja RA6: entrada del oscilador principal (OSC2)/salida de señal de reloj (CLK0) En el reset las líneas RA0, RA1, RA2, RA3 y RA5 se configuran como líneas de entrada analógicas. Para poder utilizarlas como líneas digitales de E/S hay que desactivar la función analógica: 5
6 PUERTO B: Dispone de 8 líneas de E/S. Las funciones alternativas son: RB0: entrada analógica (AN12)/ interrupción externa 0 (INT0)/entrada de fallo del ECCP (FLT0)/entrada de datos del SPI (SDI)/línea de datos del I2C (SDA) RB1: entrada analógica (AN10)/ interrupción externa 1 (INT1)/línea de reloj del SPI (SDI)/línea de reloj del I2C (SDA) RB2: entrada analógica (AN8)/ interrupción externa 2 (INT2)/salida de datos del USB (VCMO) RB3: entrada analógica (AN9)/ línea de E/S del CCP2 (CCP2)/salida de datos del USB (VPO) RB4: entrada analógica (AN11)/ interrupción por cambio en pin (KBI0)/ salida de CS del SSP (CSSP) RB5: interrupción por cambio en pin (KBI1)/ línea de programación (PGM) RB6: interrupción por cambio en pin (KBI2)/ línea de programación (PGC) RB7: interrupción por cambio en pin (KBI3)/ línea de programación (PGD) PUERTO C: Dispone de 5 líneas de E/S (RC0, RC1, RC2, RC6 y RC7) y 2 líneas de solo entrada (RC4 y RC5). Las funciones alternativas son: RC0: salida del oscilador del Temp. 1 (T1OSO)/ entrada de contador de los Temp. 1 y 3 (T13CKI) RC1: entrada del oscilador del Temp. 1 (T1OSI)/ línea de E/S del CCP2 (CCP2)/ salida OE del transceiver del USB (UOE) RC2: línea de E/S del CCP1 (CCP1)/ salida PWM del ECCP1 (P1A) RC4: línea menos del bus USB (D-) / línea de entrada del USB (VM) RC5: línea más del bus USB (D-) / línea de entrada del USB (VP) RC6: salida de transmisión del EUSART (TX)/ línea de reloj del EUSART (CK) RC7: entrada de recepción del EUSART (RX)/ línea de datos síncrona del EUSART (DT)/ salida de datos del SPI (SDO) En el reset todas las líneas del puerto C quedan configuradas como entradas digitales. 6
7 PUERTO D: Dispone de 8 líneas de E/S. Las funciones alternativas son: RD0: línea de datos del SPP (SPP0) RD1: línea de datos del SPP (SPP1) RD2: línea de datos del SPP (SPP2) RD3: línea de datos del SPP (SPP3) RD4: línea de datos del SPP (SPP4) RD5: línea de datos del SPP (SPP5) / salida PWM del ECCP1 (P1B) RD6: línea de datos del SPP (SPP6) / salida PWM del ECCP1 (P1C) RD7: línea de datos del SPP (SPP7) / salida PWM del ECCP1 (P1D) PUERTO E: Dispone de 3 líneas de E/S (RE0, RE1 y RE2) y 1 línea de solo entrada (RE3). Las funciones alternativas son: RE0: entrada analógica (AN5)/ salida de reloj 1 del SPP (CK1SPP) RE1: entrada analógica (AN6)/ salida de reloj 2 del SPP (CK2SPP) RE2: entrada analógica (AN7)/ salida de habilitación del SPP (OESPP) RE3: Línea de reset externo (MCLR) / línea de programación (VPP) En el reset todas las líneas RE2..RE0 se configuran como entradas analógicas. Para poder utilizarlas como líneas digitales de E/S hay que desactivar la función analógica. La línea RE3 por defecto tiene la función de Reset del uc 7
8 TEMPORIZADOR 1: Características fundamentales: Configurable como temporizador/contador de 16 bits Dispone de un oscilador propio que puede funcionar como: Señal de reloj del temporizador 1 Señal de reloj del uc en modos de bajo consumo Pre-escalar de 3 bits programable Interrupción por desbordamiento CONVERTIDOR ANALÓGICO-DIGITAL: Características fundamentales: 10 bits de resolución 13 canales multiplexados Señal de reloj de conversión configurable Tiempo de adquisición programable (0 a 20TAD) Posibilidad de establecer el rango de tensiones de conversión mediante tensiones de referencia externas 8


9 Selección del canal de conversión: Para que uno de los 13 canales pueda ser seleccionado, previamente debe haber sido configurado como entrada analógica mediante los bits PCFG3..PCFG0 del registro ADCON1 (A: analógico / D: digital). Memoria separada para instrucciones y datos Los buses pueden ser distintos 9


10 Diagrama de bloques Diagrama de bloques 10


11 Diferentes osciladores Velocidad 11


12 Instrucciones Pipeline Permite ejecutar varias instrucciones en un mismo ciclo (Búsqueda y ejecución) ALU 12

13 Periféricos en Departamento de Electrónica Fundación San Valero Periféricos 13

14 Periféricos Puertos I/O 14
PIC 18F45XX CARACTERÍSTICAS GENERALES
 PIC 18F45XX CARACTERÍSTICAS GENERALES 1. Características generales CPU con arquitectura Harvard (77 instrucciones) Todas las instrucciones constan de 1 sola palabra de 16 bits (2 bytes) excepto las de
PIC 18F45XX CARACTERÍSTICAS GENERALES 1. Características generales CPU con arquitectura Harvard (77 instrucciones) Todas las instrucciones constan de 1 sola palabra de 16 bits (2 bytes) excepto las de
Elección de un microcontrolador
 Elección de un microcontrolador Decisión multivariable. No hay un óptimo evidente Factores: Herramientas de desarrollo Base de conocimientos Precio y disponibilidad Familia versátil y en desarrollo Cantidad
Elección de un microcontrolador Decisión multivariable. No hay un óptimo evidente Factores: Herramientas de desarrollo Base de conocimientos Precio y disponibilidad Familia versátil y en desarrollo Cantidad
MICROCONTROLADORES PIC16F84 ING. RAÚL ROJAS REÁTEGUI
 MICROCONTROLADORES PIC16F84 ING. RAÚL ROJAS REÁTEGUI DEFINICIÓN Es un microcontrolador de Microchip Technology fabricado en tecnología CMOS, completamente estático es decir si el reloj se detiene los datos
MICROCONTROLADORES PIC16F84 ING. RAÚL ROJAS REÁTEGUI DEFINICIÓN Es un microcontrolador de Microchip Technology fabricado en tecnología CMOS, completamente estático es decir si el reloj se detiene los datos
LOS PIC16F88X: LOS PUERTOS DE E/S
 LOS PIC16F88X: LOS PUERTOS DE E/S IES Juan de la Cierva Aprendizaje de la Electrónica a través de la Robótica Fernando Remiro Domínguez PORTA Es un puerto bidireccional de 8 bits que permite el acceso
LOS PIC16F88X: LOS PUERTOS DE E/S IES Juan de la Cierva Aprendizaje de la Electrónica a través de la Robótica Fernando Remiro Domínguez PORTA Es un puerto bidireccional de 8 bits que permite el acceso
Capítulo 1. Introducción a los PIC de 8 bits
 Capítulo 1. Introducción a los PIC de 8 bits 1.1 Memorias y Registros Entre los componentes básicos de un microcontrolador podemos definir el contador, sus registros, la memoria, el watchdog timer, el
Capítulo 1. Introducción a los PIC de 8 bits 1.1 Memorias y Registros Entre los componentes básicos de un microcontrolador podemos definir el contador, sus registros, la memoria, el watchdog timer, el
MICROCONTROLADORES PIC BÁSICO (PIC 16F84A / 16F627)
") MICROCONTROLADORES PIC BÁSICO (PIC 16F84A / 16F627) TEMARIO Objetivo: El estudiante comprenderá la evolución de los microcontroladores y microprocesadores así como sus diferencias, desarrollara su habilidad
MICROCONTROLADORES PIC BÁSICO (PIC 16F84A / 16F627) TEMARIO Objetivo: El estudiante comprenderá la evolución de los microcontroladores y microprocesadores así como sus diferencias, desarrollara su habilidad
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Muestreo de señales analógicas Principal requerimiento que surge al muestrear una señal continua: Definir el periodo de muestreo con suficiente exactitud. Ajustar el mismo a un valor adecuado de acuerdo
Muestreo de señales analógicas Principal requerimiento que surge al muestrear una señal continua: Definir el periodo de muestreo con suficiente exactitud. Ajustar el mismo a un valor adecuado de acuerdo
MICROCONTROLADORES: FUNDAMENTOS Y APLICACIONES CON PIC. Autores: Fernando E. Valdés Pérez Ramon Pallàs Areny. Título de la obra:
 Título de la obra: MICROCONTROLADORES: FUNDAMENTOS Y APLICACIONES CON PIC Autores: Fernando E. Valdés Pérez Ramon Pallàs Areny Composición y preimpresión: Carles Parcerisas Civit (3Q Editorial) Reservados
Título de la obra: MICROCONTROLADORES: FUNDAMENTOS Y APLICACIONES CON PIC Autores: Fernando E. Valdés Pérez Ramon Pallàs Areny Composición y preimpresión: Carles Parcerisas Civit (3Q Editorial) Reservados
PIC16F88. Características
 Osciladores PIC16F88. Características Osciladores a cristal: LP, XT y HS hasta 20Mhz Oscilador externo hasta 20Mhz Oscilador interno: 31Khz 8Mhz Periféricos Módulo PWM/CCP CCP (captura/comparación) ->
Osciladores PIC16F88. Características Osciladores a cristal: LP, XT y HS hasta 20Mhz Oscilador externo hasta 20Mhz Oscilador interno: 31Khz 8Mhz Periféricos Módulo PWM/CCP CCP (captura/comparación) ->
Preguntas claves (y sus respuestas)
") 1 Preguntas claves (y sus respuestas) Qué es un microprocesador? Es un Circuito Integrado Secuencial Síncrono Qué necesita para funcionar? Qué hace? Para qué? Una tensión continua estable (5V, 3.3V, 2.5V,
1 Preguntas claves (y sus respuestas) Qué es un microprocesador? Es un Circuito Integrado Secuencial Síncrono Qué necesita para funcionar? Qué hace? Para qué? Una tensión continua estable (5V, 3.3V, 2.5V,
Tema: Microprocesadores
 Universidad Nacional de Ingeniería Arquitectura de Maquinas I Unidad I: Introducción a los Microprocesadores y Microcontroladores. Tema: Microprocesadores Arq. de Computadora I Ing. Carlos Ortega H. 1
Universidad Nacional de Ingeniería Arquitectura de Maquinas I Unidad I: Introducción a los Microprocesadores y Microcontroladores. Tema: Microprocesadores Arq. de Computadora I Ing. Carlos Ortega H. 1
Sistema de Desarrollo para el Microcontrolador PIC18F452
 ESCUELA TÉCNICA SUPERIOR DE INGENIEROS INDUSTRIALES Y DE TELECOMUNICACIÓN Sistema de Desarrollo para el Microcontrolador PIC18F452 Alumno: Andrés Valverde Villarán Tutora: Carmen Aracil Fernández Sevilla,
ESCUELA TÉCNICA SUPERIOR DE INGENIEROS INDUSTRIALES Y DE TELECOMUNICACIÓN Sistema de Desarrollo para el Microcontrolador PIC18F452 Alumno: Andrés Valverde Villarán Tutora: Carmen Aracil Fernández Sevilla,
ESCUELA SUPERIOR POLITÉCNICA DE CHIMBORAZO
 ESCUELA SUPERIOR POLITÉCNICA DE CHIMBORAZO FACULTAD DE INFORMÁTICA Y ELECTRÓNICA ESCUELA DE INGENIERÍA ELECTRÓNICA ZIGBEE PARA LA IMPLEMENTACIÓN DE UNA SALA DE CONFERENCIAS INTELIGENTE EN LA EMPRESA ELÉCTRICA
ESCUELA SUPERIOR POLITÉCNICA DE CHIMBORAZO FACULTAD DE INFORMÁTICA Y ELECTRÓNICA ESCUELA DE INGENIERÍA ELECTRÓNICA ZIGBEE PARA LA IMPLEMENTACIÓN DE UNA SALA DE CONFERENCIAS INTELIGENTE EN LA EMPRESA ELÉCTRICA
Taller de Firmware. Introducción al PIC16F877. Facultad de Ingeniería Instituto de Com putación
 Taller de Firmware Introducción al PIC16F877 Facultad de Ingeniería Instituto de Com putación Contenido Introducción a los microcontroladores PIC. Presentación del PIC 16F877. Introducción a los microcontroladores
Taller de Firmware Introducción al PIC16F877 Facultad de Ingeniería Instituto de Com putación Contenido Introducción a los microcontroladores PIC. Presentación del PIC 16F877. Introducción a los microcontroladores
MICROCONTROLADOR PIC DE MICROCHIP
 MICROCONTROLADOR PIC DE MICROCHIP PIC16F877-28-PIN 8-BIT CMOS FLASH MICROCONTROLLER PIC16F877: ESTRUCTURA INTERNA Bus de Datos Bus de Datos (programa) Registro de trabajo (acumulador) Conversor A/D Contador/Temporizador
MICROCONTROLADOR PIC DE MICROCHIP PIC16F877-28-PIN 8-BIT CMOS FLASH MICROCONTROLLER PIC16F877: ESTRUCTURA INTERNA Bus de Datos Bus de Datos (programa) Registro de trabajo (acumulador) Conversor A/D Contador/Temporizador
Microcontroladores. Sistemas embebidos para tiempo real
 Microcontroladores Objetivos Describir los conceptos y bloques básicos de microcontroladores CPU, ISA, arquitectura Comprender la importancia de conocer el uc Utilizar e interpretar manuales de usuario
Microcontroladores Objetivos Describir los conceptos y bloques básicos de microcontroladores CPU, ISA, arquitectura Comprender la importancia de conocer el uc Utilizar e interpretar manuales de usuario
Microcontrolador PIC16F84: Arquitectura
 Microcontrolador PIC16F84: Arquitectura La arquitectura del PIC es tipo Harvard: Mem. de Programa (instrucciones) (tipo FLASH) Control DIR DATOS µp (tipo RISC, pipeline de 2 etapas) Control DIR DATOS 14
Microcontrolador PIC16F84: Arquitectura La arquitectura del PIC es tipo Harvard: Mem. de Programa (instrucciones) (tipo FLASH) Control DIR DATOS µp (tipo RISC, pipeline de 2 etapas) Control DIR DATOS 14
Estructura de Microprocesadores. Profesor Ing. Johan Carvajal Godínez
 Estructura de Microprocesadores PIC 18F4550 Módulos de Comunicación Serie Profesor Ing. Johan Carvajal Godínez Contenido Módulos de comunicación serie sincrónica I2C SPI Módulo de comunicación serie Asincrónico
Estructura de Microprocesadores PIC 18F4550 Módulos de Comunicación Serie Profesor Ing. Johan Carvajal Godínez Contenido Módulos de comunicación serie sincrónica I2C SPI Módulo de comunicación serie Asincrónico
Microcontroladores. Sistemas embebidos para tiempo real
 Microcontroladores Sistemas embebidos para tiempo real Objetivos Describir los conceptos y bloques básicos de microcontroladores CPU, ISA, arquitectura Comprender la importancia de conocer el uc Utilizar
Microcontroladores Sistemas embebidos para tiempo real Objetivos Describir los conceptos y bloques básicos de microcontroladores CPU, ISA, arquitectura Comprender la importancia de conocer el uc Utilizar
Microcontroladores ( C)
") Microcontroladores ( C) Bibliografia: Hoja de datos del PIC 16F84 y 16F628 (www.microchip.com) Microcontroladores PIC: la clave del diseño (biblioteca) Microcontroladores PIC: diseño práctico de aplicaciones
Microcontroladores ( C) Bibliografia: Hoja de datos del PIC 16F84 y 16F628 (www.microchip.com) Microcontroladores PIC: la clave del diseño (biblioteca) Microcontroladores PIC: diseño práctico de aplicaciones
TEMA 2: MICROPROCESADORES Y MICROCONTROLADORES
 12/31/2011 1 TEMA 2: MICROPROCESADORES Y MICROCONTROLADORES Sistemas Digitales basados en Microprocesador Grado en Ingeniería Telemática Raúl Sánchez Reíllo Sistemas Digitales Basados en Microprocesador
12/31/2011 1 TEMA 2: MICROPROCESADORES Y MICROCONTROLADORES Sistemas Digitales basados en Microprocesador Grado en Ingeniería Telemática Raúl Sánchez Reíllo Sistemas Digitales Basados en Microprocesador
Anexo II: Lógica programada y lógica cableada. Ventajas e inconvenientes. MSP430G2553.
 Anexo II: Lógica programada y lógica cableada. Ventajas e inconvenientes. MSP430G2553. 1. Introducción Como se observa a lo largo de este proyecto, en casi todas las tarjetas esclavo recurrimos a usar
Anexo II: Lógica programada y lógica cableada. Ventajas e inconvenientes. MSP430G2553. 1. Introducción Como se observa a lo largo de este proyecto, en casi todas las tarjetas esclavo recurrimos a usar
Microcontroladores PIC
 Microcontroladores PIC Procesador RISC. Arquitectura Harvard Pipeline Formato de instrucciones ortogonal Arquitectura basada en banco de registros Distintos periféricos: temporizadores, puertos paralelo/serie,
Microcontroladores PIC Procesador RISC. Arquitectura Harvard Pipeline Formato de instrucciones ortogonal Arquitectura basada en banco de registros Distintos periféricos: temporizadores, puertos paralelo/serie,
ESTRUCTURA BÁSICA DEL µc AT89C51
 Desde mediados de la década de los 80 s gran parte de los diseños basados en la automatización (electrodomésticos, sencillas aplicaciones Industriales, instrumentación medica, control numérico, etc.) utilizaban
Desde mediados de la década de los 80 s gran parte de los diseños basados en la automatización (electrodomésticos, sencillas aplicaciones Industriales, instrumentación medica, control numérico, etc.) utilizaban
Microprocesadores, Tema 2:
 Microprocesadores, Tema 2: Introducción al Microcontrolador PIC18 Guillermo Carpintero, guiller@ing.uc3m.es Universidad Carlos III de Madrid Diagrama de bloques PIC microcontrollers: An introduction to
Microprocesadores, Tema 2: Introducción al Microcontrolador PIC18 Guillermo Carpintero, guiller@ing.uc3m.es Universidad Carlos III de Madrid Diagrama de bloques PIC microcontrollers: An introduction to
Periféricos Interfaces y Buses
 Periféricos Interfaces y Buses I. Arquitectura de E/S II. Programación de E/S III. Interfaces de E/S de datos IV. Dispositivos de E/S de datos V. Buses Buses de E/S (PCI, PC104, AGP). Sistemas de interconexión
Periféricos Interfaces y Buses I. Arquitectura de E/S II. Programación de E/S III. Interfaces de E/S de datos IV. Dispositivos de E/S de datos V. Buses Buses de E/S (PCI, PC104, AGP). Sistemas de interconexión
INSTITUTO TECNOLÓGICO SUPERIOR DE PÁNUCO APUNTES DE LA MATERIA DE: MICROPROCESADORES Y MICROCONTROLADORES I
 INSTITUTO TECNOLÓGICO SUPERIOR DE PÁNUCO APUNTES DE LA MATERIA DE: MICROPROCESADORES Y MICROCONTROLADORES I DEPARTAMENTO DE INGENIERÍA ELECTRÓNICA ING. FORTINO VÁZQUEZ ELORZA Documento traducido de la
INSTITUTO TECNOLÓGICO SUPERIOR DE PÁNUCO APUNTES DE LA MATERIA DE: MICROPROCESADORES Y MICROCONTROLADORES I DEPARTAMENTO DE INGENIERÍA ELECTRÓNICA ING. FORTINO VÁZQUEZ ELORZA Documento traducido de la
Memoria y Entrada/Salida Tecnología Organización - Expansión
 Universidad Simón Bolívar Departamento de Electrónica y Circuitos EC2721 Arquitectura del Computador I Prof. Osberth De Castro Clase 05 Memoria y Entrada/Salida Tecnología Organización - Expansión La memoria
Universidad Simón Bolívar Departamento de Electrónica y Circuitos EC2721 Arquitectura del Computador I Prof. Osberth De Castro Clase 05 Memoria y Entrada/Salida Tecnología Organización - Expansión La memoria
Capítulo 2 LOS MICROCONTROLADORES MC68H(R)C908JL3/JK3/JK1. Capítulo 3 INTRODUCCIÓN A LA PROGRAMACIÓN DE LOS MICROCONTROLADORES MOTOROLA- FREESCALE
C908JL3/JK3/JK1. Capítulo 3 INTRODUCCIÓN A LA PROGRAMACIÓN DE LOS MICROCONTROLADORES MOTOROLA- FREESCALE") CONTENIDO Mensaje del editor...iii Web de Apoyo...iv Agradecimientos...vi El autor...vii Contenido...ix Prólogo de Freescale...xv Introducción... xvii Capítulo 1 INTRODUCCIÓN A LOS MICROCONTROLADORES MOTOROLA-FREESCALE
CONTENIDO Mensaje del editor...iii Web de Apoyo...iv Agradecimientos...vi El autor...vii Contenido...ix Prólogo de Freescale...xv Introducción... xvii Capítulo 1 INTRODUCCIÓN A LOS MICROCONTROLADORES MOTOROLA-FREESCALE
Arquitecturas de DSP TMS320F28xxx
 ... 7 de febrero de 2017 Universidad Nacional Autónoma de México Indice Kernel de un DSP 1 Kernel de un DSP Unidad central de proceso Indice Kernel de un DSP 1 Kernel de un DSP Unidad central de proceso
... 7 de febrero de 2017 Universidad Nacional Autónoma de México Indice Kernel de un DSP 1 Kernel de un DSP Unidad central de proceso Indice Kernel de un DSP 1 Kernel de un DSP Unidad central de proceso
Tema 4 Microprocesador MCF5282: Hardware
 Tema 4 Microprocesador MCF5282: Hardware Curso 2010/11 Índice 1. Introducción 2. Descripción general de los terminales 3. Módulo de interfaz externo (EIM) 4. Módulo de generación de chip-selects (CS) 5.
Tema 4 Microprocesador MCF5282: Hardware Curso 2010/11 Índice 1. Introducción 2. Descripción general de los terminales 3. Módulo de interfaz externo (EIM) 4. Módulo de generación de chip-selects (CS) 5.
Introducción Motivaciones Objetivos Resumen...6
 Índice Introducción...1 1. Motivaciones...3 2. Objetivos...5 3. Resumen...6 1. Introducción a los DSPs...9 1.1. Introducción...11 1.2. Referencia histórica...13 1.3. Familia TMS320 DSP de Texas Instruments...15
Índice Introducción...1 1. Motivaciones...3 2. Objetivos...5 3. Resumen...6 1. Introducción a los DSPs...9 1.1. Introducción...11 1.2. Referencia histórica...13 1.3. Familia TMS320 DSP de Texas Instruments...15
5. Microcontroladores de 32 bits. (C) 2007 Ibercomp S. A.
 2007 Ibercomp S. A.") 0LFURFRQWURODGRUHVGHELWV Cada vez existen más equipos que incorporan un microcontrolador en su sistema con el fin de aumentar de manera importante sus prestaciones, reducir su tamaño y coste, mejorar su
0LFURFRQWURODGRUHVGHELWV Cada vez existen más equipos que incorporan un microcontrolador en su sistema con el fin de aumentar de manera importante sus prestaciones, reducir su tamaño y coste, mejorar su
ARQUITECTURA DEL PIC16F84A
 ARQUITECTURA DEL PIC16F84A Arquitectura interna del PIC16F84A CPU ALU Decodificador de Instrucciones - Buses Registro de trabajo W PC Contador de Programa Organización de la memoria Memoria de Programa
ARQUITECTURA DEL PIC16F84A Arquitectura interna del PIC16F84A CPU ALU Decodificador de Instrucciones - Buses Registro de trabajo W PC Contador de Programa Organización de la memoria Memoria de Programa
Arquitectura de Computadores II
 Facultad de Ingeniería Universidad de la República Instituto de Computación Temas Repaso de conceptos Microcontroladores CISC vs RISC CISC Complex Instruct Set Computers RISC Reduced Instruct Set Computers
Facultad de Ingeniería Universidad de la República Instituto de Computación Temas Repaso de conceptos Microcontroladores CISC vs RISC CISC Complex Instruct Set Computers RISC Reduced Instruct Set Computers
Características PIC16F84
 Departamento de Electrónica Fundación San Valero del Toda la información que grabamos (memoria de programa y de datos) se puede modificar con el microcontrolador conectado a la aplicación. (ICSP = In-Circuit
Departamento de Electrónica Fundación San Valero del Toda la información que grabamos (memoria de programa y de datos) se puede modificar con el microcontrolador conectado a la aplicación. (ICSP = In-Circuit
Microcontrolador PIC18F4550. Lenguaje Ensamblador Lenguaje C
 Microcontrolador PIC18F4550 Lenguaje Ensamblador Lenguaje C MICROCONTROLADORES PIC s Familias de microcontroladores PICPIC10: microcontroladores de 8 bits, de bajo coste, de 6 pines y bajas prestaciones
Microcontrolador PIC18F4550 Lenguaje Ensamblador Lenguaje C MICROCONTROLADORES PIC s Familias de microcontroladores PICPIC10: microcontroladores de 8 bits, de bajo coste, de 6 pines y bajas prestaciones
CAPITULO 4. LOS DSPs
 LOS DSPs 4 Los DSPs 4.1 Introducción Los procesadores digitales de señales (DSPs) pueden ser de naturaleza programable o dedicada. Los procesadores de señales programables permiten flexibilidad de implementación
LOS DSPs 4 Los DSPs 4.1 Introducción Los procesadores digitales de señales (DSPs) pueden ser de naturaleza programable o dedicada. Los procesadores de señales programables permiten flexibilidad de implementación
AUTOMATIZACION. Reconocer la arquitectura y características de un PLC Diferenciar los tipos de entradas y salidas MARCO TEORICO. Estructura Interna
 AUTOMATIZACION GUIA DE TRABAJO 3 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Reconocer la arquitectura
AUTOMATIZACION GUIA DE TRABAJO 3 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Reconocer la arquitectura
ÍNDICE CAPÍTULO 1 FUNDAMENTOS DE LOS MICROCONTROLADORES
 ÍNDICE CAPÍTULO 1 FUNDAMENTOS DE LOS MICROCONTROLADORES 1.1 Introducción 1.2 Fundamentos de los procesadores digitales secuenciales 1.2.1 Introducción 1.2.2 Arquitectura interna 1.2.2.1 Procesadores digitales
ÍNDICE CAPÍTULO 1 FUNDAMENTOS DE LOS MICROCONTROLADORES 1.1 Introducción 1.2 Fundamentos de los procesadores digitales secuenciales 1.2.1 Introducción 1.2.2 Arquitectura interna 1.2.2.1 Procesadores digitales
RB0 RB1 RB2 RB3 RB4 RB5 RB6 RB7 PIC 16F87X. Figura # 1
 UNIVERSIDAD NACIONAL EXPERIMENTAL POLITÉCNICA "ANTONIO JOSÉ DE SUCRE" DEPARTAMENTO DE ELECTRÓNICA Ejercicios para el parcial # 2 Prof. Ing. Antonio Pateti 1.- Estudie el hardware del Puerto B y explique:
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITÉCNICA "ANTONIO JOSÉ DE SUCRE" DEPARTAMENTO DE ELECTRÓNICA Ejercicios para el parcial # 2 Prof. Ing. Antonio Pateti 1.- Estudie el hardware del Puerto B y explique:
Capítulo 3. Microcontroladores 3.1 Definiciones
 Capítulo 3. Microcontroladores En este capítulo se define el microcontrolador, con una breve semblanza histórica sobre procesadores. Se habla más detenidamente sobre los PICs y se muestran características
Capítulo 3. Microcontroladores En este capítulo se define el microcontrolador, con una breve semblanza histórica sobre procesadores. Se habla más detenidamente sobre los PICs y se muestran características
Introducción a Arduino y las herramientas. José H. Moyano Sistemas Embebidos /22
 Introducción a Arduino y las herramientas José H. Moyano Sistemas Embebidos 2016 1/22 Qué es Arduino Arduino es una plataforma electrónica open-source basada en un microcontrolador simple, puertos de entrada/salida
Introducción a Arduino y las herramientas José H. Moyano Sistemas Embebidos 2016 1/22 Qué es Arduino Arduino es una plataforma electrónica open-source basada en un microcontrolador simple, puertos de entrada/salida
Contenido. Manual de ASSERTA Rev B - - Mayo de 2018 Página Introducción Características principales FPGA...
 Contenido 1. Introducción... 3 2. Características principales... 4 2.1 FPGA... 4 2.2 Recursos en ASSERTA... 4 3. Diagrama de bloques... 5 4. Diseño y disposición física de la tarjeta... 6 5. Puertos y
Contenido 1. Introducción... 3 2. Características principales... 4 2.1 FPGA... 4 2.2 Recursos en ASSERTA... 4 3. Diagrama de bloques... 5 4. Diseño y disposición física de la tarjeta... 6 5. Puertos y
xl PIC16F877
 4.6.8.- PIC16F877 xl 4.6.9.- PIC 16F84 xli xlii 4.7.- ANEXO3 4.7.1.- El Microcontrolador PIC16F84: Este microcontrolador es un Circuito Integrado Programable o PIC por sus siglas en Inglés: (Programmable
4.6.8.- PIC16F877 xl 4.6.9.- PIC 16F84 xli xlii 4.7.- ANEXO3 4.7.1.- El Microcontrolador PIC16F84: Este microcontrolador es un Circuito Integrado Programable o PIC por sus siglas en Inglés: (Programmable
PIC16F882/883/884/886/ Funcionamiento de Timer1 6 EL MODULO TMR1 CON PUERTA DE CONTROL Selección de Fuente de reloj
 6.1. Funcionamiento de Timer1 6 EL MODULO TMR1 CON PUERTA DE CONTROL El módulo TMR1 es un temporizador/contador de 16 bits con las siguientes características: Temporizador/Contador de 16 bits (TMR1L:TMR1H)
6.1. Funcionamiento de Timer1 6 EL MODULO TMR1 CON PUERTA DE CONTROL El módulo TMR1 es un temporizador/contador de 16 bits con las siguientes características: Temporizador/Contador de 16 bits (TMR1L:TMR1H)
LOS PIC16F87X. Características Generales. IES Juan de la Cierva (Madrid). Desarrollo de Productos Electrónicos
. Desarrollo de Productos Electrónicos") LOS PIC6F87X Características Generales D. de B L O Q U E S Los Pic6F87X Fernando Remiro D. de B L O Q U E S Características () Procesador de arquitectura RISC avanzada Juego de solo 35 instrucciones con
LOS PIC6F87X Características Generales D. de B L O Q U E S Los Pic6F87X Fernando Remiro D. de B L O Q U E S Características () Procesador de arquitectura RISC avanzada Juego de solo 35 instrucciones con
CAPÍTULO 2. ARQUITECTURA Y COMPONENTES.
 CAPÍTULO 2. ARQUITECTURA Y COMPONENTES. 2.1. ARQUITECTURA DEL SISTEMA. Vamos a proporcionar en este apartado una visión general de la arquitectura del sistema, para que así el lector pueda obtener una
CAPÍTULO 2. ARQUITECTURA Y COMPONENTES. 2.1. ARQUITECTURA DEL SISTEMA. Vamos a proporcionar en este apartado una visión general de la arquitectura del sistema, para que así el lector pueda obtener una
ESPino - Especificaciones
 ESPino - Especificaciones Resumen Microcontrolador ESP8266 (32-bit RISC) WiFi 802.11 (station, access point, P2P) Voltaje de operación 3.3V Voltaje de entrada 4.4-15V Pines de I/O Digitales 9 Pines de
ESPino - Especificaciones Resumen Microcontrolador ESP8266 (32-bit RISC) WiFi 802.11 (station, access point, P2P) Voltaje de operación 3.3V Voltaje de entrada 4.4-15V Pines de I/O Digitales 9 Pines de
UNIVERSIDAD NACIONAL DE COLOMBIA SEDE BOGOTÁ FACULTAD DE INGENIERÍA INGENIERÍA MECATRÓNICA
 UNIVERSIDAD NACIONAL DE COLOMBIA SEDE BOGOTÁ FACULTAD DE INGENIERÍA INGENIERÍA MECATRÓNICA INTRODUCCIÓN AL PIC NOMENCLATURA ARQUITECTURA. TEMPORIZACIÓN. SET DE INSTRUCCIONES. MODOS DE DIRECCIONAMIENTO.
UNIVERSIDAD NACIONAL DE COLOMBIA SEDE BOGOTÁ FACULTAD DE INGENIERÍA INGENIERÍA MECATRÓNICA INTRODUCCIÓN AL PIC NOMENCLATURA ARQUITECTURA. TEMPORIZACIÓN. SET DE INSTRUCCIONES. MODOS DE DIRECCIONAMIENTO.
MÓDULO COMPARADOR Y REFERENCIA DE TENSIÓN PARA LA COMPARACIÓN
 MÓDULO COMPARADOR Y REFERENCIA DE TENSIÓN PARA LA COMPARACIÓN - + Fernando Nuño García 1 Estos dos módulos existen en la versión de los PIC16F87xA pero NO en la versión PIC16F87x PIC16F877 PIC16F877A 2
MÓDULO COMPARADOR Y REFERENCIA DE TENSIÓN PARA LA COMPARACIÓN - + Fernando Nuño García 1 Estos dos módulos existen en la versión de los PIC16F87xA pero NO en la versión PIC16F87x PIC16F877 PIC16F877A 2
Registros SFR vistos hasta ahora: Microcontroladores PIC
 Registros SFR vistos hasta ahora: Microcontroladores PIC Microcontroladores PIC: Timer Características del Timer TMR0: Cumple básicamente la función de contador de eventos (o divisor de frecuencia). El
Registros SFR vistos hasta ahora: Microcontroladores PIC Microcontroladores PIC: Timer Características del Timer TMR0: Cumple básicamente la función de contador de eventos (o divisor de frecuencia). El
Estructura de Microprocesadores
 Estructura de Microprocesadores Introducción al diseño de sistemas electrónicos basados en microcontrolador Profesor Ing. Johan Carvajal Godínez JCG-2009 Agenda de clase Definición de microcontrolador
Estructura de Microprocesadores Introducción al diseño de sistemas electrónicos basados en microcontrolador Profesor Ing. Johan Carvajal Godínez JCG-2009 Agenda de clase Definición de microcontrolador
Proyecto Terminal P R E S E N T A:
 INSTITUTO POLITÉCNICO NACIONAL Escuela Superior de Ingeniería Mecánica y Eléctrica Proyecto Terminal CONTROL INTELIGENTE Y MONITOREO VÍA WEB DE ELEMENTOS ABIÓTICOS MEDIANTE SISTEMA EMBEBIDO PIC PARA UNA
INSTITUTO POLITÉCNICO NACIONAL Escuela Superior de Ingeniería Mecánica y Eléctrica Proyecto Terminal CONTROL INTELIGENTE Y MONITOREO VÍA WEB DE ELEMENTOS ABIÓTICOS MEDIANTE SISTEMA EMBEBIDO PIC PARA UNA
PIC16C5X (GAMA BAJA) Solo en dispositivos de 28 pins. Encapsulado y patillaje:
 Solo en dispositivos de 28 pins. Encapsulado y patillaje:") PIC6C5X (GAMA BAJA) Oscilador RESET SLEEP WatchDog Timer (WDT) Protección de código e IDs Periféricos: Timer/Contador de 8bits (T) con prescaler compartido para WDT o TMR Hasta 3 puertos I/O (RA,RB,RC)
PIC6C5X (GAMA BAJA) Oscilador RESET SLEEP WatchDog Timer (WDT) Protección de código e IDs Periféricos: Timer/Contador de 8bits (T) con prescaler compartido para WDT o TMR Hasta 3 puertos I/O (RA,RB,RC)
MICROCONTROLADORES PIC
 MICROCONTROLADORES PIC LOS TIMER DE LOS 16F87x TEMA EL TIMER 1 CCFF D.P.E. MÓDULO DE PROYECTOS 1 Diagrama de Bloques del TIMER1 CCFF D.P.E. MÓDULO DE PROYECTOS 2 INTRODUCCIÓN El módulo TIMER1 es un temporizador/contador
MICROCONTROLADORES PIC LOS TIMER DE LOS 16F87x TEMA EL TIMER 1 CCFF D.P.E. MÓDULO DE PROYECTOS 1 Diagrama de Bloques del TIMER1 CCFF D.P.E. MÓDULO DE PROYECTOS 2 INTRODUCCIÓN El módulo TIMER1 es un temporizador/contador
PROYECTO DISEÑO Y CONSTRUCCIÓN DE UN MONITOR DE SIGNOS VITALES BASADO EN UN COMPUTADOR PORTÁTIL PRODUCTO INTERMEDIO P12 MÓDULO DIGITALIZACIÓN
 PROYECTO DISEÑO Y CONSTRUCCIÓN DE UN MONITOR DE SIGNOS VITALES BASADO EN UN COMPUTADOR PORTÁTIL PRODUCTO INTERMEDIO P12 MÓDULO DIGITALIZACIÓN ACTIVIDADES: A12 1: Diagrama a bloques del Módulo de Digitalización
PROYECTO DISEÑO Y CONSTRUCCIÓN DE UN MONITOR DE SIGNOS VITALES BASADO EN UN COMPUTADOR PORTÁTIL PRODUCTO INTERMEDIO P12 MÓDULO DIGITALIZACIÓN ACTIVIDADES: A12 1: Diagrama a bloques del Módulo de Digitalización
2.4. Subsistema 16F877
 2.4. Subsistema 16F877 2.4.1. Introducción 2.4.2. Implementación Hardware 2.4.2.1. Circuito de Alimentación 2.4.2.2. Circuito de Reloj y Reset 2.4.2.3. Entradas y Salidas 2.4.2.4. Driver y relés 2.4.2.5.
2.4. Subsistema 16F877 2.4.1. Introducción 2.4.2. Implementación Hardware 2.4.2.1. Circuito de Alimentación 2.4.2.2. Circuito de Reloj y Reset 2.4.2.3. Entradas y Salidas 2.4.2.4. Driver y relés 2.4.2.5.
SADE en LabView. IO PIN: SADE cuenta con 13 pines que se pueden configurar como entrada, salida e inclusive como PWM.
 SADE en LabView SADE (Sistema de Adquisición de Datos flexible ) es la aplicación de INTESC la cual facilita el manejo de la tarjeta Symbhia mediante comandos en lenguaje de alto nivel. En el siguiente
SADE en LabView SADE (Sistema de Adquisición de Datos flexible ) es la aplicación de INTESC la cual facilita el manejo de la tarjeta Symbhia mediante comandos en lenguaje de alto nivel. En el siguiente
La Familia del Microcontrolador 8051
 La Familia del Microcontrolador 8051 Generalidades de la familia del 8051 Es uno de los µc s más viejos (Intel MCS-51 en 1981) y probablemente el más popular, ya que ha sido comercializado por un gran
La Familia del Microcontrolador 8051 Generalidades de la familia del 8051 Es uno de los µc s más viejos (Intel MCS-51 en 1981) y probablemente el más popular, ya que ha sido comercializado por un gran
Introducción a la arquitectura PIC
 18 de septiembre de 2012 Contenido 1 Microprocesadores y Microcontroladores 2 3 4 Microprocesadores y Microcontroladores Microcomputadora consiste básicamente de: Unidad central de procesamiento (CPU),
18 de septiembre de 2012 Contenido 1 Microprocesadores y Microcontroladores 2 3 4 Microprocesadores y Microcontroladores Microcomputadora consiste básicamente de: Unidad central de procesamiento (CPU),
PANORAMA GENERAL DE LOS µc
 PANORAMA GENERAL DE LOS µc Sistemas Digitales II Este tipo de dispositivos en la actualidad se encuentran en los supermercados, artículos electrodomésticos, instrumentos musicales, juguetes, equipo automotriz
PANORAMA GENERAL DE LOS µc Sistemas Digitales II Este tipo de dispositivos en la actualidad se encuentran en los supermercados, artículos electrodomésticos, instrumentos musicales, juguetes, equipo automotriz
UNIDAD 2. Unidad de Microprocesador (MPU) Microprocesadores Otoño 2011
 Microprocesadores Otoño 2011") 1 UNIDAD 2 Unidad de Microprocesador (MPU) Microprocesadores Otoño 2011 Contenido 2 Unidad de Microprocesador Generalizada Memoria Dispositivos de Entrada y Salida Sistemas basados en Microprocesadores
1 UNIDAD 2 Unidad de Microprocesador (MPU) Microprocesadores Otoño 2011 Contenido 2 Unidad de Microprocesador Generalizada Memoria Dispositivos de Entrada y Salida Sistemas basados en Microprocesadores
SYC1616 Controlador Entradas/Salidas
 SYC1616 Controlador Entradas/Salidas MANUAL TECNICO Versión 1.00 de Febrero 2012 C/ Jaume Balmes, 10 08210 Barbera del Valles (Barcelona) TEL. 93 718 59 16 Fax.. 93 718 59 16 http//:www.syc.cat Pagina
SYC1616 Controlador Entradas/Salidas MANUAL TECNICO Versión 1.00 de Febrero 2012 C/ Jaume Balmes, 10 08210 Barbera del Valles (Barcelona) TEL. 93 718 59 16 Fax.. 93 718 59 16 http//:www.syc.cat Pagina
UNIVERSIDAD DE SAN CARLOS DE GUATEMALA FACULTAD DE INGENIERIA ESCUELA DE MECANICA ELECTRICA LABORATORIO DE ELECTRONICA PENSUM ELECTRONICA 6
 UNIVERSIDAD DE SAN CARLOS DE GUATEMALA FACULTAD DE INGENIERIA ESCUELA DE MECANICA ELECTRICA LABORATORIO DE ELECTRONICA PENSUM ELECTRONICA 6 ~ 1 ~ ÍNDICE Introducción...página 3 Teoría y prácticas de instrumentación...página
UNIVERSIDAD DE SAN CARLOS DE GUATEMALA FACULTAD DE INGENIERIA ESCUELA DE MECANICA ELECTRICA LABORATORIO DE ELECTRONICA PENSUM ELECTRONICA 6 ~ 1 ~ ÍNDICE Introducción...página 3 Teoría y prácticas de instrumentación...página
Contenido MICROCONTROLADORES PIC16F877A Y PIC16F887 / SALVATIERRA. Alfaomega. 3.4 Soporte Muestras... 25
 Contenido Introducción 1 Parte 1 Conceptos básicos 3 1.0 Componentes de un MCU... 3 1.1 Partes básicas... 3 1.1.1 ALU (Unidad lógica aritmética). 4 1.1.2 I/O (INPUT/OUTPUT)... 4 1.1.3 Memoria (RAM, ROM...
Contenido Introducción 1 Parte 1 Conceptos básicos 3 1.0 Componentes de un MCU... 3 1.1 Partes básicas... 3 1.1.1 ALU (Unidad lógica aritmética). 4 1.1.2 I/O (INPUT/OUTPUT)... 4 1.1.3 Memoria (RAM, ROM...
SISTEMAS DE ADQUISICIÓN
 SISTEMAS DE ADQUISICIÓN Aplicación Plataforma Estructura Hardware Software Componentes especiales Francisco Simón Muñiz 1.1 APLICACIÓN Ensayo de laboratorio Control industrial Control viviendas Control
SISTEMAS DE ADQUISICIÓN Aplicación Plataforma Estructura Hardware Software Componentes especiales Francisco Simón Muñiz 1.1 APLICACIÓN Ensayo de laboratorio Control industrial Control viviendas Control
Sílabo de Microcontroladores
 Sílabo de Microcontroladores I. Datos generales Código ASUC 00599 Carácter Obligatorio Créditos 4 Periodo académico 2018 Prerrequisito Circuitos y sistemas Horas Teóricas: 2 Prácticas: 4 II. Sumilla de
Sílabo de Microcontroladores I. Datos generales Código ASUC 00599 Carácter Obligatorio Créditos 4 Periodo académico 2018 Prerrequisito Circuitos y sistemas Horas Teóricas: 2 Prácticas: 4 II. Sumilla de
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Muestreo de señales analógicas Principal requerimiento que surge al muestrear una señal continua: Definir el periodo de muestreo con suficiente exactitud. Ajustar el mismo a un valor adecuado de acuerdo
Muestreo de señales analógicas Principal requerimiento que surge al muestrear una señal continua: Definir el periodo de muestreo con suficiente exactitud. Ajustar el mismo a un valor adecuado de acuerdo
INDICE Capitulo 1. Microcontroladores Programables: La Solución está en un CHIP Capitulo 2. Microcontroladores de 8 BITS: Los <<PIC>>
 INDICE Prólogo XIII Capitulo 1. Microcontroladores Programables: La Solución está en un CHIP 1 1.1. Qué es un microcontrolador? 1 1.1.1. Diferencia entre microprocesador y microcontrolador 3 1.4. Arquitectura
INDICE Prólogo XIII Capitulo 1. Microcontroladores Programables: La Solución está en un CHIP 1 1.1. Qué es un microcontrolador? 1 1.1.1. Diferencia entre microprocesador y microcontrolador 3 1.4. Arquitectura
Tarjeta de depuración y programación para el PIC 16F877
 Tarjeta de depuración y programación para el PIC 16F877 I. Bravo Muñoz, O. Durán Mora, J.L. Lázaro Galilea Departamento de Electrónica. Universidad de Alcalá. E-mail: ibravo@depeca.uah.es Website: www.depeca.uah.es/
Tarjeta de depuración y programación para el PIC 16F877 I. Bravo Muñoz, O. Durán Mora, J.L. Lázaro Galilea Departamento de Electrónica. Universidad de Alcalá. E-mail: ibravo@depeca.uah.es Website: www.depeca.uah.es/
Interface paralelo programable 8255.
 Interface paralelo programable 8255. 1 Comunicaciones paralelo. CARACTERÍSTICAS Transferencia simultánea de bits por líneas separadas Ventaja: frecuencias de transmisión mayores Desventaja: el coste de
Interface paralelo programable 8255. 1 Comunicaciones paralelo. CARACTERÍSTICAS Transferencia simultánea de bits por líneas separadas Ventaja: frecuencias de transmisión mayores Desventaja: el coste de
Sistemas de adquisición? Variables involucradas en estos sistemas? Filtros? Señales?
 Julio Cruz Sistemas de adquisición? Variables involucradas en estos sistemas? Filtros? Señales? Sistemas de adquisición de señales Conversión análogo-digital Sistema de adquisición de ECG Comerciales Prototipo
Julio Cruz Sistemas de adquisición? Variables involucradas en estos sistemas? Filtros? Señales? Sistemas de adquisición de señales Conversión análogo-digital Sistema de adquisición de ECG Comerciales Prototipo
UPMDIE. 2 - Sistemas embebidos INDUSTRIALES. Sistemas embebidos CPU, Memorias, dispositivos de E/S y buses Sistema microprocesador ejemplo: Arduino
 cei@upm.es 2 - Sistemas embebidos Sistemas embebidos CPU, Memorias, dispositivos de E/S y buses Sistema microprocesador ejemplo: Arduino Universidad Politécnica de Madrid Sistemas embebidos Qué es un sistema
cei@upm.es 2 - Sistemas embebidos Sistemas embebidos CPU, Memorias, dispositivos de E/S y buses Sistema microprocesador ejemplo: Arduino Universidad Politécnica de Madrid Sistemas embebidos Qué es un sistema
Universidad Tecnológica de la Mixteca Huajuapan de León, Oax.
 1 2 Universidad Tecnológica de la Mixteca Huajuapan de León, Oax. 3 Directorio Dr. Modesto Seara Vázquez Rector M.C. Gerardo García Hernández Vice-Rector Académico C.P. José Javier Ruiz Santiago Vice-Rector
1 2 Universidad Tecnológica de la Mixteca Huajuapan de León, Oax. 3 Directorio Dr. Modesto Seara Vázquez Rector M.C. Gerardo García Hernández Vice-Rector Académico C.P. José Javier Ruiz Santiago Vice-Rector
Propuesta de interfaz para PLUMABOT
 Propuesta de interfaz para PLUMABOT Proponemos que el interfaz entre las placas base y las placas de expansión lleve dos conectores: un conector para I 2 C y/o SPI y otro conector general. Conector I 2
Propuesta de interfaz para PLUMABOT Proponemos que el interfaz entre las placas base y las placas de expansión lleve dos conectores: un conector para I 2 C y/o SPI y otro conector general. Conector I 2
ITT-327-T Microprocesadores
 ITT-327-T Microprocesadores Controlador de Interfaz Paralelo Programable (PPI) 8255. Controlador de Interfaz Paralelo Programable (PPI) 8255. Es un periférico programable de E/S de aplicación general,
ITT-327-T Microprocesadores Controlador de Interfaz Paralelo Programable (PPI) 8255. Controlador de Interfaz Paralelo Programable (PPI) 8255. Es un periférico programable de E/S de aplicación general,
Introducción a las Computadoras. Capítulo 3 Buses del Sistema
 Introducción a las Computadoras Capítulo 3 Buses del Sistema Concepto de Programa Los sistemas de propósito específico no son flexibles El Hardware de propósito general puede realizar diferentes tareas,
Introducción a las Computadoras Capítulo 3 Buses del Sistema Concepto de Programa Los sistemas de propósito específico no son flexibles El Hardware de propósito general puede realizar diferentes tareas,
Microcontroladores PIC
 Microcontroladores PIC 1 Características generales: Arquitectura Harvard, procesador segmentado. Compatibilidad software entre los modelos de la misma gama. Sencillez de uso y herramientas de desarrollo
Microcontroladores PIC 1 Características generales: Arquitectura Harvard, procesador segmentado. Compatibilidad software entre los modelos de la misma gama. Sencillez de uso y herramientas de desarrollo
Qué es un Microcontrolador?
 Qué es un Microcontrolador? Es un circuito integrado programable que contiene todos los componentes de un computadora, aunque de limitadas prestaciones y se destina a gobernar una sola tarea. Cómo se compone
Qué es un Microcontrolador? Es un circuito integrado programable que contiene todos los componentes de un computadora, aunque de limitadas prestaciones y se destina a gobernar una sola tarea. Cómo se compone
PRODUCTO P05 SOFTWARE EMBEBIDO PARA EL CONTROL DEL CIRCUITO GENERADOR DE CORRIENTE DE LAS FORMAS DE ONDAS PARA ELECTROTERAPIA
 PRODUCTO P05 SOFTWARE EMBEBIDO PARA EL CONTROL DEL CIRCUITO GENERADOR DE CORRIENTE DE LAS FORMAS DE ONDAS PARA ELECTROTERAPIA Actividades: A05-1: Elaboración del diagrama de flujo de las funciones de control
PRODUCTO P05 SOFTWARE EMBEBIDO PARA EL CONTROL DEL CIRCUITO GENERADOR DE CORRIENTE DE LAS FORMAS DE ONDAS PARA ELECTROTERAPIA Actividades: A05-1: Elaboración del diagrama de flujo de las funciones de control
Sistemas Informáticos. Estructura Funcional
 Módulo: Fundamentos del Hardware Editorial: RA-MA Autores: Juan Carlos Moreno y Juan Serrano Sistemas Informáticos. Estructura Funcional TEMA 1 INDICE 1.1. Introducción a los Sistemas Informáticos 1.1.1.
Módulo: Fundamentos del Hardware Editorial: RA-MA Autores: Juan Carlos Moreno y Juan Serrano Sistemas Informáticos. Estructura Funcional TEMA 1 INDICE 1.1. Introducción a los Sistemas Informáticos 1.1.1.
1.1 Introducción y definición de un microcontrolador 1.2 Estructura básica de un microcontrolador 1.3 Características de la Arquitectura
 Índice 1.1 Introducción y definición de un microcontrolador 1.2 Estructura básica de un microcontrolador 1.3 Características de la Arquitectura 1.3.1 Arquitectura RISC 1.3.2 Arquitectura Harvard 1.3.3
Índice 1.1 Introducción y definición de un microcontrolador 1.2 Estructura básica de un microcontrolador 1.3 Características de la Arquitectura 1.3.1 Arquitectura RISC 1.3.2 Arquitectura Harvard 1.3.3
Sensores inalámbricos de bajo
 Sensores inalámbricos de bajo consumo. Parte 1. El sistema de telemetría con microcontroladores PIC Autor: Marc Ralita Álvarez Director proyecto: Francesc Sánchez Robert Sensores inalámbricos de bajo consumo
Sensores inalámbricos de bajo consumo. Parte 1. El sistema de telemetría con microcontroladores PIC Autor: Marc Ralita Álvarez Director proyecto: Francesc Sánchez Robert Sensores inalámbricos de bajo consumo
En este capítulo se presenta un breve resumen de la tarjeta DSK C5x que es de bajo costo,
 4 EL PROCESADOR TMS320C50 4.1 Introducción En este capítulo se presenta un breve resumen de la tarjeta DSK C5x que es de bajo costo, simple y permite realizar aplicaciones de procesamiento en tiempo real
4 EL PROCESADOR TMS320C50 4.1 Introducción En este capítulo se presenta un breve resumen de la tarjeta DSK C5x que es de bajo costo, simple y permite realizar aplicaciones de procesamiento en tiempo real
Ejercicios del tema 4. El procesador
 Ejercicios del tema 4. El procesador Estructura del procesador elemental WepSIM Address Bus Data Bus Control Bus C0 Ta Internal Bus RA RB RC LC MAR T9 Memory MRdy BE ADDR DATA R W A31-A0 BE3-BE0 D31-D0
Ejercicios del tema 4. El procesador Estructura del procesador elemental WepSIM Address Bus Data Bus Control Bus C0 Ta Internal Bus RA RB RC LC MAR T9 Memory MRdy BE ADDR DATA R W A31-A0 BE3-BE0 D31-D0
Diseño Basado en Microcontroladores.
 Diseño Basado en Microcontroladores. Tema 3: Hardware del microcontrolador M16C/62 de Mitsubishi. (4 horas) 3.1. Características generales. 3.2. Arquitectura interna. Diagrama de bloques. 3.3. Mapa de
Diseño Basado en Microcontroladores. Tema 3: Hardware del microcontrolador M16C/62 de Mitsubishi. (4 horas) 3.1. Características generales. 3.2. Arquitectura interna. Diagrama de bloques. 3.3. Mapa de
TEMA 2. Interrupciones y periféricos básicos
 TEMA 2 Interrupciones y periféricos básicos INDICE 1. Interrupciones 1. Fuentes y habilitación de interrupciones 2. Vectores de interrupción 3. Prioridad y anidamiento 4. Registros de configuración 5.
TEMA 2 Interrupciones y periféricos básicos INDICE 1. Interrupciones 1. Fuentes y habilitación de interrupciones 2. Vectores de interrupción 3. Prioridad y anidamiento 4. Registros de configuración 5.
Estructura de Microprocesadores. Profesor Ing. Johan Carvajal Godínez
 Estructura de Microprocesadores PIC 18F4550 Administración de los temporizadores Profesor Ing. Johan Carvajal Godínez Módulos temporizadores El MCU 18F4550 posee cuatro módulos de temporización independientes
Estructura de Microprocesadores PIC 18F4550 Administración de los temporizadores Profesor Ing. Johan Carvajal Godínez Módulos temporizadores El MCU 18F4550 posee cuatro módulos de temporización independientes
Qué es un Autómata Programable?
 ARQUITECTURA INTERNA DEL DEL AUTÓMATA PROGRAMABLE O PLC PLC Facultad Ciencias Carlos Canto Qué es un Autómata Programable? Un autómata programable industrial (API) o Programable logic controller (PLC),
ARQUITECTURA INTERNA DEL DEL AUTÓMATA PROGRAMABLE O PLC PLC Facultad Ciencias Carlos Canto Qué es un Autómata Programable? Un autómata programable industrial (API) o Programable logic controller (PLC),
Qué es un Microcontrolador?
 Qué es un Microcontrolador? Es un circuito integrado programable que contiene todos los componentes de un computadora, aunque de limitadas prestaciones y se destina a gobernar una sola tarea. Cómo se compone
Qué es un Microcontrolador? Es un circuito integrado programable que contiene todos los componentes de un computadora, aunque de limitadas prestaciones y se destina a gobernar una sola tarea. Cómo se compone
Unidad Didáctica 3: Microcontroladores & Interrupciones. Sistemas embebidos para tiempo real
 Unidad Didáctica 3: Microcontroladores & Interrupciones Sistemas embebidos para tiempo real Índice Repaso: µp vs. µc, CPU, tamaño de palabra. Arquitectura RISC vs. CISC Harvard vs. von Neumann Comparación
Unidad Didáctica 3: Microcontroladores & Interrupciones Sistemas embebidos para tiempo real Índice Repaso: µp vs. µc, CPU, tamaño de palabra. Arquitectura RISC vs. CISC Harvard vs. von Neumann Comparación
Tema 4. Organización de la memoria
 Tema 4 Organización de la memoria 1 ARQUITECTURA DEL PIC16F84 Tema 4. Organización de la memoria Memoria de programa tipo ROM Flash de 1024 registros de 14 bits Memoria de datos dividida en dos áreas:
Tema 4 Organización de la memoria 1 ARQUITECTURA DEL PIC16F84 Tema 4. Organización de la memoria Memoria de programa tipo ROM Flash de 1024 registros de 14 bits Memoria de datos dividida en dos áreas:
UNIVERSIDAD DE OVIEDO
 1 Funcionamiento Multiplexado con otros módulos Características generales de los puertos en el PIC16F877 Son 5 Puertos de E/S configurables PORTA: 6 pines (dir 0x05) PORTB: 8 pines (dir 0x06 y 0x106) PORTC:
1 Funcionamiento Multiplexado con otros módulos Características generales de los puertos en el PIC16F877 Son 5 Puertos de E/S configurables PORTA: 6 pines (dir 0x05) PORTB: 8 pines (dir 0x06 y 0x106) PORTC:
Microcontroladores 1. INTRODUCCIÓN A LOS MICROCONTROLADORES. M. C. Felipe Santiago Espinosa
 Microcontroladores 1. INTRODUCCIÓN A LOS MICROCONTROLADORES M. C. Felipe Santiago Espinosa Octubre / 2016 SISTEMAS ELECTRÓNICOS Actualmente, Qué tan importantes son? 2 QUÉ ELEMENTOS O PARTES ENCONTRAMOS
Microcontroladores 1. INTRODUCCIÓN A LOS MICROCONTROLADORES M. C. Felipe Santiago Espinosa Octubre / 2016 SISTEMAS ELECTRÓNICOS Actualmente, Qué tan importantes son? 2 QUÉ ELEMENTOS O PARTES ENCONTRAMOS
1.2 Arquitectura interna del microcontrolador
 1.2 Arquitectura interna del microcontrolador El microcontrolador seleccionado para este curso es el MSP430 de Texas instruments http://www.ti.com/msp430 En particular el MSP430G2553 y la tarjeta LaunchPad
1.2 Arquitectura interna del microcontrolador El microcontrolador seleccionado para este curso es el MSP430 de Texas instruments http://www.ti.com/msp430 En particular el MSP430G2553 y la tarjeta LaunchPad
8.3. Introducción a las E/S del sistema
 8.3. Introducción a las E/S del sistema Interface entre dispositivos periféricos y el. iferencia en velocidad de funcionamiento (tasa de transferencia). iferencia en las unidades de información. iferencia
8.3. Introducción a las E/S del sistema Interface entre dispositivos periféricos y el. iferencia en velocidad de funcionamiento (tasa de transferencia). iferencia en las unidades de información. iferencia
UNIVERSIDAD TECNOLÓGICA DE LA MIXTECA. Ingeniería en Electrónica EL MICROCONTROLADOR PIC16F84 PRESENTA: M. C. Felipe Santiago Espinosa
 UNIVERSIDAD TECNOLÓGICA DE LA MIXTECA Ingeniería en Electrónica EL MICROCONTROLADOR PIC16F84 PRESENTA: M. C. Felipe Santiago Espinosa Noviembre de 2007 Objetivos 2 Que los participantes adquieran el conocimiento
UNIVERSIDAD TECNOLÓGICA DE LA MIXTECA Ingeniería en Electrónica EL MICROCONTROLADOR PIC16F84 PRESENTA: M. C. Felipe Santiago Espinosa Noviembre de 2007 Objetivos 2 Que los participantes adquieran el conocimiento