VISUALINO Apuntes y Proyectos IV
|
|
|
- Patricia Lucero Roldán
- hace 6 años
- Vistas:
Transcripción

1 VISUALINO Apuntes y Proyectos IV por BY - SA - NC

")
2 Servos (de rotación continua)
3 Qué son los servos? Un servo es un motor de corriente continua especial; gracias a un sistema de engranajes reductores y electrónica de control integrada, seremos capaces de controlar su posición (ángulo), como su velocidad. Algunos servos (servos de rotación continua) se usan como motores de corriente continua especiales en los que es fácil programar el sentido de la marcha y su velocidad, pero no su posición. Suelen consumir poco y ser capaces de tener un par motor relativamente elevado. Otros están mejor diseñados para girar en ángulos precisos (entre 0º y 180º, e incluso 0º y 360º). Los servos se usan mucho como motores para robots (por ejemplo, el printbot de BQ) o para posicionamiento de elementos.
4 Paso previo: diferencias entre 5V y Vin ARDUINO puede alimentarse de dos formas: bien a través de la tensión proporcionada por el ordenador a través del puerto USB (5V) o bien a través de unas pilas o baterías, admitiendo pilas o baterías que proporcionen entre 7-12 Voltios (recomendado). Bien, en la primera opción no hay diferencia. Ambos pines 5V, y Vin te proporcionarán aproximadamente la misma tensión (suele ser algo menor de 5V, alrededor de 4.5V) pero en el segundo caso sí tiene importancia. 5V seguirá siendo esa tensión (siempre algo menos) y Vin será el valor de tensión de las pilas o la batería. Por qué es importante cuando uso motores? Porque los motores tienen una tensión de trabajo (puede ser 5V o puede ser más) que hay que aplicar, y según la carga, que necesiten un consumo mayor o menor (intensidad en ma). Es posible que algunos motores no tengan suficiente con lo que proporciona el puerto USB y necesiten baterías o pilas más potentes. Por eso, y según la aplicación, al usar servos y/o motores de corriente continua, necesitaré pilas o baterías potentes y circuitos añadidos (ULN2003, un puente H como el SN75441 o un motor driver shield). Ejemplo en:

5 Activar un servo de rotación continua. adelante, para, atrás, para. LED 13 enciende cuando gira en sentido horario. El sentido horario o antihorario hay que verlo desde la trasera del servo, no desde donde gira el eje. Si el servo tiembla cuando se da la orden de paro, hay que calibrarlo. Calibración:


6 Consideraciones de los servos de rotación continua Los servos de rotación continua, a diferencia de otros servos, no saben parar a un ángulo determinado. Cuando se le proporciona un ángulo de 0º giran en sentido horario a máxima velocidad. Por tanto los bloques de la derecha son equivalentes. Si uso el segundo bloque con 90º el efecto es el de pararse. Si uso el segundo bloque con 180º el efecto es el de girar en sentido contrario. Si el segundo bloque se usa con números entre 1º y 89, contra más cerca de 90º más despacio gira en sentido horario. Entre 91º y 179º ocurre algo idéntico en sentido antihorario. Si no estoy satisfecho con la velocidad de un motor, quizás necesite considerar servos más potentes u otros motores de corriente continua.

7 Controla velocidad y dirección de un servo r.c. con un potenciómetro

8 Servos (posicionamiento)


9 Controla el ángulo del servo Muy parecido al del control de velocidad con servos de rotación continua. Según el modelo, con 0º o 180º puede temblar. Evitarlo poniendo un rango de 1º a 179º
10 Proyectos con servos Con dos servos de corriente continua, y algún tipo de base y un par de ruedas, montadas y atornilladas sobre el eje de los servos, construye un pequeño coche. Hazlo moverse adelante, atrás, girar (Para que tenga estabilidad, un tornillo largo en la parte trasera puede hacer de contrapeso). Con dicho coche, intenta los siguientes retos Proyecto 1: Que avance unos 5 metros atravesando la puerta de una habitación, se gire y vuelva a la habitación. Proyecto 2: Que le dé un par de vueltas a una mesa. Proyecto 3: Con un servo normal, de posicionamiento (atornillar algún elemento indicador), y con dos sensores LDR, el servo debe apuntar donde se esté recibiendo más cantidad de luz. Proyecto 4: En el coche anterior, con dos sensores LDR, el coche debe girar hacia donde haya más luz.



11 posible solución proyecto 4 con ldr Proyecto susceptible de ser mejorado
12 Motores corriente continua ( Con ULN2003)

13 Activado simple del motor REAL NOTA: El motor se conecta a los 5V de tensión del ARDUINO. Si requiere otra fuente de tensión externa, el pin 9 del ULN deberá conectarse a ella e interconectar todos los negativos al GND. Cada salida (colector par darlington) del ULN2003 admite 500mA máximo de corriente. ESQUEMA

14 Activado simple del motor.

15 Control de la velocidad del motor Empieza en un valor alto. Un valor muy bajo hará que el motor no se mueva.

16 Motores Paso a Paso ( Con ULN2003)
17 Sobre motores paso a paso. No es nuestro objetivo estudiar a fondo este tipo de motores. Simplemente daremos alguna información sobre ellos. Tener en cuenta que: 1. En lo que sigue tendremos como ejemplo un motor paso a paso unipolar de 6 cables; podemos aprender más sobre ellos en esta web: 2. En la web anterior, leer al final, si lo necesitáis, cómo identificar cada cable. 3. Usaremos para activarlos nuestra placa ARDUINO más un micro ULN Un motor paso a paso nos servirá para poder controlar con precisión la posición de nuestro motor así como la velocidad y sentido de rotación. 5. Los motores paso a paso se pueden encontrar fácilmente en algunos dispositivos electrónicos e informáticos, como impresoras, grabadoras o discos duros. 6. Se supondrá que se tienen identificados las conexiones. Los pines A, B, C y D se conectarán, a través del ULN2003, a los pines 8, 9, 10 y 11 de ARDUINO.


18 Motor paso a paso. En el caso de usar una fuente externa, conectar dicha fuente al pin 9, así como a los cables comunes. El motor del esquema funciona con los 5 Volt. de Arduino.

19 Motor paso a paso. Secuencia normal. Giro antihorario. Función activarpaso que recibe un paso de 0 a 3

20 Motor paso a paso. Secuencia normal. Variable t, tiempo de espera entre activaciones. Cuidado! Una t muy pequeña o cero puede hacer que no funciones bien. En cualquier caso, experimenta. Declarar variables y decir en qué pin están conectadas. Empezar en el paso 0 Sumar 1 al paso, y tomar el resto de la división entre cuatro; cuando paso = 3 al sumar 1 se convertirá en 4, pero al calcular el resto se volverá otra vez 0. Pregunta: Qué modificación o añadido programa para que girase en el otro sentido? harías al Ampliación: diseña un programa, que, con dos botones, avance un poco el motor a izquierda o derecha.

21 Motor paso a paso. Secuencia WAVE DRIVE


22 Motor paso a paso. Secuencia Medio Paso
23 Motores corriente continua ( Con L293D)
24 L293D wordpress. com/2012/06/08/con trol-de-motor-ccvelocidad-ydireccion/ Este microchip es capaz de controlar dos motores de corriente continua con un consumo de 600mA en cada motor, y una tensión entre 4,5V y 36V. Vs y Vss debe estar a la tensión de trabajo del motor. Si es una fuente externa habrá que conectar su positivo a ambos pines, y el negativo conectarlo con el GND de la placa. Para pequeñas potencias con motores de 5V, se puede probar con la tensión del Arduino. El pin ENABLE controla la velocidad, conectando a un pin de salida analógica. Los pines 2 (INPUT1) y 7 (INPUT2) controlan el sentido de giro. Para ello, uno tiene que estar en bajo y el otro en alto. Para el segundo motor, las conexiones son análogas.
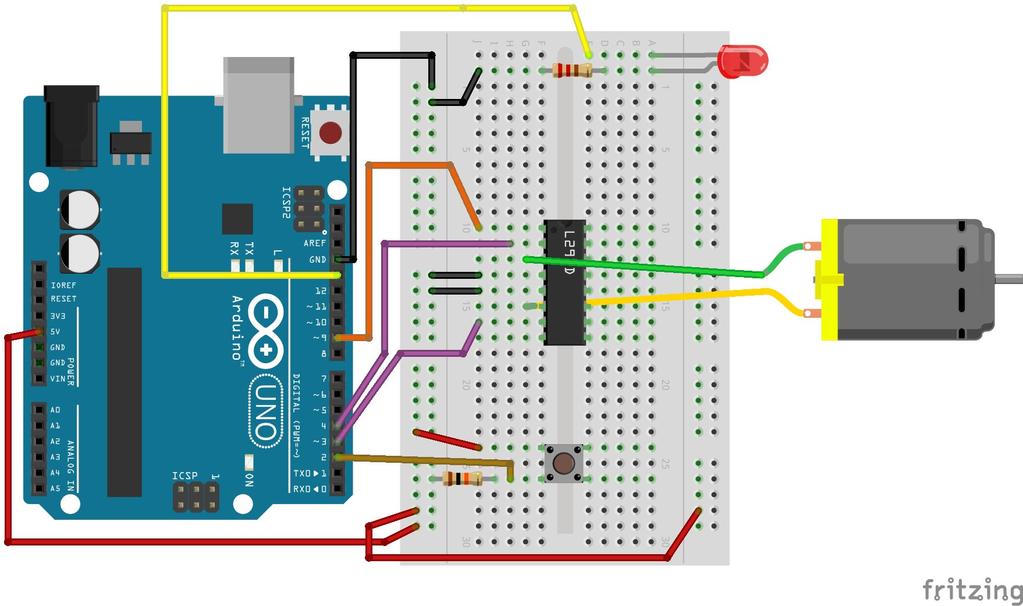
25 Conexionado

26 Cambiar sentido de giro pulsando un botón Variables Máxima potencia Giro

27 Cambio de velocidad enviando por puerto serie nºs del 0 al 9 Controlado el giro mediante un botón conectado al pin 2. Velocidad controlada mediante un número introducido por teclado del 0 al 9. 0 parada total y 9 máxima potencia. Control de velocidad

28 Cambio de velocidad enviando por puerto serie nºs del 0 al 9 Cond. inicial Vel: de 0 al 5 + y - : cambian sentido de giro
29 L298N-L293D
Motor de Corriente Continua
 1.2.12. Motor de Corriente Continua En este proyecto vamos a controlar un motor de corriente continua como los que se utilizan en multitud de proyectos de tecnología o juguetes como coches teledirigidos,
1.2.12. Motor de Corriente Continua En este proyecto vamos a controlar un motor de corriente continua como los que se utilizan en multitud de proyectos de tecnología o juguetes como coches teledirigidos,
Curso Robótica Práctica
 TÍTULO DE LA UNIDAD DIDÁCTICA Montaje de distintos proyectos fundamentales con ambos entornos: Placa controladora PICAXE. Placa controladora ARDUINO. CURSO 3º-4º ESO DESCRIPCIÓN DE LA UNIDAD DIDÁCTICA
TÍTULO DE LA UNIDAD DIDÁCTICA Montaje de distintos proyectos fundamentales con ambos entornos: Placa controladora PICAXE. Placa controladora ARDUINO. CURSO 3º-4º ESO DESCRIPCIÓN DE LA UNIDAD DIDÁCTICA
Tutorial sobre Motores Paso a Paso (Stepper motors) Recopilado de Internet
 Recopilado de Internet") Prof: Bolaños D. Tutorial sobre Motores Paso a Paso (Stepper motors) Recopilado de Internet Los motores paso a paso son ideales para la construcción de mecanismos en donde se requieren movimientos muy
Prof: Bolaños D. Tutorial sobre Motores Paso a Paso (Stepper motors) Recopilado de Internet Los motores paso a paso son ideales para la construcción de mecanismos en donde se requieren movimientos muy
Programación Arduino Con Visualino
 Programación Arduino Con Visualino Ponente: Ing. Patricio Tisalema ROBOTS FAMOSOS Y NO TAN FAMOSOS PERO SÍ CERCANOS QUÉ ES ROBOT? Es un sistema electro-mecánico que por su apariencia de movimientos, ofrece
Programación Arduino Con Visualino Ponente: Ing. Patricio Tisalema ROBOTS FAMOSOS Y NO TAN FAMOSOS PERO SÍ CERCANOS QUÉ ES ROBOT? Es un sistema electro-mecánico que por su apariencia de movimientos, ofrece
Shield Dynamotion V3.0
 Shield Dynamotion V3.0 Descripción Es una shield diseñada para armar ROBOTS con arduino!, con la board Dynamotion puedes controlar dos motores DC, conectar un máximo de 6 sensores análogos, 6 sensores
Shield Dynamotion V3.0 Descripción Es una shield diseñada para armar ROBOTS con arduino!, con la board Dynamotion puedes controlar dos motores DC, conectar un máximo de 6 sensores análogos, 6 sensores
Sensor Analógico: Potenciómetro
 1.2.16. Sensor Analógico: Potenciómetro En esta actividad vamos a utilizar un potenciómetro como ejemplo de sensor analógico. Los potenciómetros son utilizados en multitud de aplicaciones, como por ejemplo
1.2.16. Sensor Analógico: Potenciómetro En esta actividad vamos a utilizar un potenciómetro como ejemplo de sensor analógico. Los potenciómetros son utilizados en multitud de aplicaciones, como por ejemplo
VISUALINO Apuntes y Proyectos V
 VISUALINO Apuntes y Proyectos V por BY - SA - NC Displays 7 segmentos Conexionado de un display de 7 segmentos. Activado. A cada número corresponde un conexionado distinto de 7 leds. Por ejemplo, al 1
VISUALINO Apuntes y Proyectos V por BY - SA - NC Displays 7 segmentos Conexionado de un display de 7 segmentos. Activado. A cada número corresponde un conexionado distinto de 7 leds. Por ejemplo, al 1
Montaje y Calibración de drivers de potencia Pololu/Stepstick
 Montaje y Calibración de drivers de potencia Pololu/Stepstick Autor: Jon Goitia Hernández Introducción La electrónica es una de las partes más delicadas a la hora de construir una impresora 3D. Se pueden
Montaje y Calibración de drivers de potencia Pololu/Stepstick Autor: Jon Goitia Hernández Introducción La electrónica es una de las partes más delicadas a la hora de construir una impresora 3D. Se pueden
IES Los Albares (Dep. de Tecnología)
") PLACA CONTROLADORA. Para conectar el ordenador con el mundo exterior es necesario una placa controladora que proporcione las salidas y las entradas oportunas. En nuestro caso disponemos de una placa controladora
PLACA CONTROLADORA. Para conectar el ordenador con el mundo exterior es necesario una placa controladora que proporcione las salidas y las entradas oportunas. En nuestro caso disponemos de una placa controladora
Figura Robot Filoguiado
 1.2.14. Robot Sigue Líneas En esta actividad vamos a utilizar los sensores de infrarrojo para que un robot sea capaz de seguir líneas negras. Este principio es utilizado en robots reales, como el de la
1.2.14. Robot Sigue Líneas En esta actividad vamos a utilizar los sensores de infrarrojo para que un robot sea capaz de seguir líneas negras. Este principio es utilizado en robots reales, como el de la
PRÁCTICAS CON ARDUINO UNO
 PRÁCTICAS CON ARDUINO UNO ÍNDICE ARDUINO: PRÁCTICA 1_ HOLA MUNDO ( ENCENDER Y APAGAR UN LED DURANTE UN TIEMPO DETERMINADO)... 7 ARDUINO: PRÁCTICA 2_ SECUENCIA DE ENCENDIDO Y APAGADO DE CUATRO LEDS...
PRÁCTICAS CON ARDUINO UNO ÍNDICE ARDUINO: PRÁCTICA 1_ HOLA MUNDO ( ENCENDER Y APAGAR UN LED DURANTE UN TIEMPO DETERMINADO)... 7 ARDUINO: PRÁCTICA 2_ SECUENCIA DE ENCENDIDO Y APAGADO DE CUATRO LEDS...
CONTROL AUTOMÁTICO CON ARDUINO
 CONTROL AUTOMÁTICO CON ARDUINO TECNOLOGIA Juan Crespo López Señal analógica: es una señal que puede tomar infinitos valores Señal digital: Es una señal que solo puede tomar dos valores 0 y 1 normalmente
CONTROL AUTOMÁTICO CON ARDUINO TECNOLOGIA Juan Crespo López Señal analógica: es una señal que puede tomar infinitos valores Señal digital: Es una señal que solo puede tomar dos valores 0 y 1 normalmente
Programar posiciones en un Micro Servo Tower Pro SG90 9G
 Programar posiciones en un Micro Servo Tower Pro SG90 9G (Recopilado de Internet. Revision Prof: Bolaños DJB) Versión: 12-04-18 Los servos son motores de corriente continua (CC), pero en lugar tener un
Programar posiciones en un Micro Servo Tower Pro SG90 9G (Recopilado de Internet. Revision Prof: Bolaños DJB) Versión: 12-04-18 Los servos son motores de corriente continua (CC), pero en lugar tener un
Manual sobre Motores a Pasos (Stepper motors)
") Manual sobre Motores a Pasos (Stepper motors) Los motores a pasos o paso a paso son ideales en la construcción de mecanismos donde se requieren movimientos con exactitud. Estos motores son dispositivos
Manual sobre Motores a Pasos (Stepper motors) Los motores a pasos o paso a paso son ideales en la construcción de mecanismos donde se requieren movimientos con exactitud. Estos motores son dispositivos
1.1. Memoria Descriptiva
 .. Memoria Descriptiva Víctor Orozco Valle ... Objeto El objeto de este proyecto es el de construir desde cero, la maqueta de un ascensor con los sensores y accionamientos necesarios para simular el comportamiento
.. Memoria Descriptiva Víctor Orozco Valle ... Objeto El objeto de este proyecto es el de construir desde cero, la maqueta de un ascensor con los sensores y accionamientos necesarios para simular el comportamiento
1.3.- Dos bombillas en paralelo con interruptor independiente. Aplicación: Bombillas en las distintas habitaciones de una vivienda.
 Prácticas de electricidad y electrónica para realizar con el entrenador eléctrico. En tu cuaderno debes explicar el funcionamiento de cada circuito, una vez realizado. 1.- CIRCUITOS BÁSICOS 1.1.- Timbre
Prácticas de electricidad y electrónica para realizar con el entrenador eléctrico. En tu cuaderno debes explicar el funcionamiento de cada circuito, una vez realizado. 1.- CIRCUITOS BÁSICOS 1.1.- Timbre
Tutores: Joaquín Moreno Marchal Agustín Carmona Lorente
 Autores: Agustín Lechuga Carretero Luis Daniel Figuereo Morales Tutores: Joaquín Moreno Marchal Agustín Carmona Lorente ÍNDICE INTRODUCCIÓN... 3 DESCRIPCIÓN DEL PROYECTO... 3 FUNCIONAMIENTO... 4 DESCRIPCIÓN
Autores: Agustín Lechuga Carretero Luis Daniel Figuereo Morales Tutores: Joaquín Moreno Marchal Agustín Carmona Lorente ÍNDICE INTRODUCCIÓN... 3 DESCRIPCIÓN DEL PROYECTO... 3 FUNCIONAMIENTO... 4 DESCRIPCIÓN
TUTORIAL III V2 (PaP)
") 1 TUTORIAL III V2 (PaP) OBJETIVOS Conocer el manejo de los motores paso a paso. Reforzar conceptos sobre el manejo de puertos I/O. Realizar lecturas de puertos y toma de decisiones basadas en estas. INTRODUCCIÓN
1 TUTORIAL III V2 (PaP) OBJETIVOS Conocer el manejo de los motores paso a paso. Reforzar conceptos sobre el manejo de puertos I/O. Realizar lecturas de puertos y toma de decisiones basadas en estas. INTRODUCCIÓN
Dispositivos de Entrada/Salida
 Dispositivos de Entrada/Salida Notas de clase: Unidad IV Materia: Diseño y Paradigmas de Lenguajes Carrera: Ingeniería en Informática/Ingeniería en Computación Universidad Nacional de San Luis 20/09/2017
Dispositivos de Entrada/Salida Notas de clase: Unidad IV Materia: Diseño y Paradigmas de Lenguajes Carrera: Ingeniería en Informática/Ingeniería en Computación Universidad Nacional de San Luis 20/09/2017
CYBERTECH 2018 TALLER 03: MOTORES Y POTENCIA
 CYBERTECH 2018 TALLER 03: MOTORES Y POTENCIA MATERIALES Arduino Motor Shield LDR Pulsador Pila 9V Motor DC Resistencias Cables MOTORES DC La velocidad de giro depende de la tensión Necesitan una reductora
CYBERTECH 2018 TALLER 03: MOTORES Y POTENCIA MATERIALES Arduino Motor Shield LDR Pulsador Pila 9V Motor DC Resistencias Cables MOTORES DC La velocidad de giro depende de la tensión Necesitan una reductora
CAPÍTULO 1. pueden llegar y estos robots llegarían a realizar ese trabajo con el solo hecho
 CAPÍTULO 1 1 Descripción del Proyecto. 1.1 Antecedentes El avance tecnológico cada día es más vertiginoso en toda área de la electrónica, y somos testigos de que día tras día surgen nuevos dispositivos
CAPÍTULO 1 1 Descripción del Proyecto. 1.1 Antecedentes El avance tecnológico cada día es más vertiginoso en toda área de la electrónica, y somos testigos de que día tras día surgen nuevos dispositivos
INTRODUCCIÓN A LOS MOTORES
 P Á G I N A 1 D E 5 TECNOLOGIA III 1er BLOQUE SEMANA 12 al 16 de Noviembre Actividad 56 INTRODUCCIÓN A LOS MOTORES Básicamente existen dos tipos de micromotores que se utilizan en robótica. Los motores
P Á G I N A 1 D E 5 TECNOLOGIA III 1er BLOQUE SEMANA 12 al 16 de Noviembre Actividad 56 INTRODUCCIÓN A LOS MOTORES Básicamente existen dos tipos de micromotores que se utilizan en robótica. Los motores
Manual de prácticas del Laboratorio de Dispositivos de Almacenamiento y de Entrada/Salida
 Secretaría/División: Área/Departamento: Manual de prácticas del Laboratorio de Dispositivos de Almacenamiento y de Entrada/Salida División de Ingeniería Eléctrica Departamento de Computación Control de
Secretaría/División: Área/Departamento: Manual de prácticas del Laboratorio de Dispositivos de Almacenamiento y de Entrada/Salida División de Ingeniería Eléctrica Departamento de Computación Control de
DEPARTAMENTO DE CIENCIAS DE LA ENERGIA Y MECANICA Laboratorio de Automatización Industrial Mecánica. TEMA: Control de procesos con Arduino.
 TEMA: Control de procesos con Arduino. Ejercicio: Controlando un proceso la ayuda de la tarjeta Arduino Objetivo: Mediante modulo Arduino, controlamos un proceso instrumentado mediante sensores y actuadores.
TEMA: Control de procesos con Arduino. Ejercicio: Controlando un proceso la ayuda de la tarjeta Arduino Objetivo: Mediante modulo Arduino, controlamos un proceso instrumentado mediante sensores y actuadores.
UNIDAD 11: CONTROL DE SERVOMOTORES
 UNIDAD 11: CONTROL DE SERVOMOTORES Objetivo y Programa de la Unidad 11 Objetivo de la presentación Estudiar las ideas principales y ejemplos básicos sobre el control servomotor en Arduino Programa de la
UNIDAD 11: CONTROL DE SERVOMOTORES Objetivo y Programa de la Unidad 11 Objetivo de la presentación Estudiar las ideas principales y ejemplos básicos sobre el control servomotor en Arduino Programa de la
TEMA 5: ROBÓTICA - MECÁNICA
 TEMA 5: ROBÓTICA - MECÁNICA La robótica es la rama de la tecnología que se dedica al diseño y construcción de robots, La robótica combina diversas materias como: mecánica, electrónica y programación e
TEMA 5: ROBÓTICA - MECÁNICA La robótica es la rama de la tecnología que se dedica al diseño y construcción de robots, La robótica combina diversas materias como: mecánica, electrónica y programación e
Qué es y cómo funciona un servomotor? (Versión )
") Qué es y cómo funciona un servomotor? (Versión 13-3-18) Por: Antony García González diciembre 2, 2016 Un servomotor es un tipo especial de motor que permite controlar la posición del eje en un momento
Qué es y cómo funciona un servomotor? (Versión 13-3-18) Por: Antony García González diciembre 2, 2016 Un servomotor es un tipo especial de motor que permite controlar la posición del eje en un momento
Motores Paso a Paso (Stepper motors)
") Juan José Martínez Bautista Ingeniería de Telecomunicación Escuela Politécnica Superior Motores Paso a Paso (Stepper motors) Los motores paso a paso son ideales para la construcción de mecanismos en donde
Juan José Martínez Bautista Ingeniería de Telecomunicación Escuela Politécnica Superior Motores Paso a Paso (Stepper motors) Los motores paso a paso son ideales para la construcción de mecanismos en donde
Servomotores. Introducción. Introducción Composición Funcionamiento. Control PWM Circuito driver
 Página 1 de 6 Servomotores Introducción Composición Funcionamiento. Control PWM Circuito driver Introducción Los servos son un tipo especial de motor de c.c. que se caracterizan por su capacidad para posicionarse
Página 1 de 6 Servomotores Introducción Composición Funcionamiento. Control PWM Circuito driver Introducción Los servos son un tipo especial de motor de c.c. que se caracterizan por su capacidad para posicionarse
Medidor de distancias En esta actividad utilizaremos un sensor de ultrasonidos como medidor de distancias
 1.2.15. Sensor Digital: Ultrasonidos En este apartado vamos a realizar varias actividades en donde utilizaremos los sensores de ultrasonido. Como veremos más adelante, un sensor de ultrasonido, al igual
1.2.15. Sensor Digital: Ultrasonidos En este apartado vamos a realizar varias actividades en donde utilizaremos los sensores de ultrasonido. Como veremos más adelante, un sensor de ultrasonido, al igual
Motores paso a paso: Características
 Motores paso a paso: Características Similares a los motores de corriente continua. Diferencia principal: se usan más para posicionamiento electromecánico. Otras diferencias: la conmutación de polos es
Motores paso a paso: Características Similares a los motores de corriente continua. Diferencia principal: se usan más para posicionamiento electromecánico. Otras diferencias: la conmutación de polos es
Tallerine. Biónico. Clase
 Taller de Introducción a la Ingeniería Eléctrica Instituto de Ingeniería Eléctrica - Facultad de Ingeniería Universidad de la Republica Tallerine Biónico Clase 4 2018 Qué hicimos? Trabajamos con arduino:
Taller de Introducción a la Ingeniería Eléctrica Instituto de Ingeniería Eléctrica - Facultad de Ingeniería Universidad de la Republica Tallerine Biónico Clase 4 2018 Qué hicimos? Trabajamos con arduino:
MANUAL DE USUARIO Y TÉCNICO
 MANUAL DE USUARIO Y TÉCNICO Seguidor Solar David Clavero Domínguez Contenido 1.-MANUAL DE USUARIO... 2 1.0.-INTRODUCCIÓN... 3 1.1.-PARTES DEL SEGUIDOR SOLAR... 4 1.2.-PUESTA EN MARCHA... 6 2.- MANUAL TÉCNICO...
MANUAL DE USUARIO Y TÉCNICO Seguidor Solar David Clavero Domínguez Contenido 1.-MANUAL DE USUARIO... 2 1.0.-INTRODUCCIÓN... 3 1.1.-PARTES DEL SEGUIDOR SOLAR... 4 1.2.-PUESTA EN MARCHA... 6 2.- MANUAL TÉCNICO...
Vigas Ruedas Planchas Ejes
 QUÉ ES MAKEBLOCK? Makeblock es un sistema de piezas intercambiables de gran resistencia que se pueden montar entre ellas fácilmente y con infinidad de combinaciones. Makeblock es accesible a pequeños (a
QUÉ ES MAKEBLOCK? Makeblock es un sistema de piezas intercambiables de gran resistencia que se pueden montar entre ellas fácilmente y con infinidad de combinaciones. Makeblock es accesible a pequeños (a
Motor Paso a Paso Stepper Unipolar
 Motor Paso a Paso Stepper Unipolar ELECTRONICA SMD electronicasmd.com 1 Introducción Un motor paso a paso es un dispositivo electromecánico que convierte los impulsos eléctricos en los movimientos mecánicos
Motor Paso a Paso Stepper Unipolar ELECTRONICA SMD electronicasmd.com 1 Introducción Un motor paso a paso es un dispositivo electromecánico que convierte los impulsos eléctricos en los movimientos mecánicos
Metodología y didáctica de la robótica y el control por ordenador
 ÍNDICE INTRODUCCIÓN 1. CARACTERÍSTICAS TÉCNICAS 1.1. CÓMO CONECTAR LA TARJETA AL ORDENADOR. 1.2. CARGAR LAS RUTINAS DE CONTROL DE LA TARJETA EN MSWLOGO. 1.3. CARACTERÍSTICAS TÉCNICAS 2. SALIDAS 2.1. SALIDAS
ÍNDICE INTRODUCCIÓN 1. CARACTERÍSTICAS TÉCNICAS 1.1. CÓMO CONECTAR LA TARJETA AL ORDENADOR. 1.2. CARGAR LAS RUTINAS DE CONTROL DE LA TARJETA EN MSWLOGO. 1.3. CARACTERÍSTICAS TÉCNICAS 2. SALIDAS 2.1. SALIDAS
TuBot 2014 GUIA DE MONTAJE Y PROGRAMACIÓN MOTORES. Dpto. de Electrónica - Universidad de Alcalá TuBot
 TuBot 2014 GUIA DE MONTAJE Y PROGRAMACIÓN MOTORES Dpto. de Electrónica - Universidad de Alcalá TuBot 2014 1 Conectamos los motores Conecta los conectores de los servos. CUIDADO! Podemos romper los motores.
TuBot 2014 GUIA DE MONTAJE Y PROGRAMACIÓN MOTORES Dpto. de Electrónica - Universidad de Alcalá TuBot 2014 1 Conectamos los motores Conecta los conectores de los servos. CUIDADO! Podemos romper los motores.
Taller de electrónica creativa. Cocinando con Arduino
 : Cocinando con Arduino 12, 13, 14-19, 20 y 21 de Junio de 2009 Yago Torroja Igor González Angela Ramos y colaboradores 1 ANEXOS II Si te da tiempo y quieres seguir cocinando, aquí tienes unas recetas
: Cocinando con Arduino 12, 13, 14-19, 20 y 21 de Junio de 2009 Yago Torroja Igor González Angela Ramos y colaboradores 1 ANEXOS II Si te da tiempo y quieres seguir cocinando, aquí tienes unas recetas
Sensor Analógico: LDR. Componentes. Conexionado Lectura del nivel de Luz. Libro de Actividades de Robótica Educativa
 1.2.17. Sensor Analógico: LDR En este apartado vamos a realizar dos actividades en donde utilizaremos un sensor de luz visible o LDR. Este tipo de sensores son analógicos, nos dan una medida de intensidad
1.2.17. Sensor Analógico: LDR En este apartado vamos a realizar dos actividades en donde utilizaremos un sensor de luz visible o LDR. Este tipo de sensores son analógicos, nos dan una medida de intensidad
Robot seguidor de línea C-9806
 Robot seguidor de línea C9806 Antes de empezar el montaje, comprobar que estén todas las piezas. El Robot seguidor, es un robot que sigue cualquier línea que esta marcada en el suelo. Puedes crear tu propio
Robot seguidor de línea C9806 Antes de empezar el montaje, comprobar que estén todas las piezas. El Robot seguidor, es un robot que sigue cualquier línea que esta marcada en el suelo. Puedes crear tu propio
EL ORDENADOR COMO DISPOSITIVO DE CONTROL
 EL ORDENADOR COMO DISPOSITIVO DE CONTROL 1.- INFORMACIÓN Y CONTROL Un sistema de control de procesos se puede definir como el conjunto de funciones y operaciones necesarias para conseguir un resultado
EL ORDENADOR COMO DISPOSITIVO DE CONTROL 1.- INFORMACIÓN Y CONTROL Un sistema de control de procesos se puede definir como el conjunto de funciones y operaciones necesarias para conseguir un resultado
CONTROLADORA 3 EJES 6 AMPERIOS
 CONTROLADORA 3 EJES 6 AMPERIOS Características: -driver universal BIPOLAR L298 2 amperios por fase -selección de paso o 1/2 paso -corriente ajustable entre 10 al 100% vía potenciómetro Reducción automática
CONTROLADORA 3 EJES 6 AMPERIOS Características: -driver universal BIPOLAR L298 2 amperios por fase -selección de paso o 1/2 paso -corriente ajustable entre 10 al 100% vía potenciómetro Reducción automática
APRENDE ARDUINO FACILMENTE CON CURSOSINDUSTRIALES.NET.
 APRENDE ARDUINO FACILMENTE CON CURSOSINDUSTRIALES.NET. Este curso está redactado por Pascual Gómez del Pino para Cursosindustriales.net. El autor y la Web reclinan las responsabilidades civiles y penales
APRENDE ARDUINO FACILMENTE CON CURSOSINDUSTRIALES.NET. Este curso está redactado por Pascual Gómez del Pino para Cursosindustriales.net. El autor y la Web reclinan las responsabilidades civiles y penales
Motor Paso a Paso Stepper Unipolar
 ABC PROYECTOS ELECTRÓNICOS ABCelectronica.net 1 Motor Paso a Paso Stepper Unipolar Introducción Un motor paso a paso es un dispositivo electromecánico que convierte los impulsos eléctricos en los movimientos
ABC PROYECTOS ELECTRÓNICOS ABCelectronica.net 1 Motor Paso a Paso Stepper Unipolar Introducción Un motor paso a paso es un dispositivo electromecánico que convierte los impulsos eléctricos en los movimientos
AR 3 T. Tutorial 3: Voltajes analógicos y PMW, Potenciómetro + LED. Objetivo General.
 Tutorial 3: Voltajes analógicos y PMW, AR 3 T Potenciómetro + LED Objetivo General. En este proyecto vamos a controlar el brillo de un led utilizando un potenciómetro. Tomaremos los valores analógicos
Tutorial 3: Voltajes analógicos y PMW, AR 3 T Potenciómetro + LED Objetivo General. En este proyecto vamos a controlar el brillo de un led utilizando un potenciómetro. Tomaremos los valores analógicos
4 Actuadores eléctricos. Alfaomega. Material Web. Arduino control de servomotores a pasos 2
 4 Actuadores eléctricos Capítulo Material Web Arduino control de servomotores a pasos 2 2 Actuadores eléctricos 4.1. 4.1 Arduino control de servomotores a pasos Un servomotor de pasos es un sistema formado
4 Actuadores eléctricos Capítulo Material Web Arduino control de servomotores a pasos 2 2 Actuadores eléctricos 4.1. 4.1 Arduino control de servomotores a pasos Un servomotor de pasos es un sistema formado
Actuadores eléctricos - Motores
 Motores de paso La característica principal de estos motores es el hecho de poder moverlos un paso a la vez por cada pulso que se le aplique. Este paso puede variar desde 90 hasta pequeños movimientos
Motores de paso La característica principal de estos motores es el hecho de poder moverlos un paso a la vez por cada pulso que se le aplique. Este paso puede variar desde 90 hasta pequeños movimientos
Instalación y entorno de programación
 Instalación y entorno de programación Miguel Ángel Asensio Hernández, Profesor de Electrónica de Comunicaciones. Departamento de Electrónica, I.E.S. Emérita Augusta. 06800 MÉRIDA. Pagina oficial de Arduino:
Instalación y entorno de programación Miguel Ángel Asensio Hernández, Profesor de Electrónica de Comunicaciones. Departamento de Electrónica, I.E.S. Emérita Augusta. 06800 MÉRIDA. Pagina oficial de Arduino:
ROBOT ESCORNABOT BRIVOI
 ROBOT ESCORNABOT BRIVOI Guía de Montaje 1 ÍNDICE INTRODUCCIÓN...3 ELEMENTOS ELÉCTRICOS...3 ESQUEMA DE BLOQUES DEL ROBOT BRIVOI...3 LA BOTONERA...3 ESQUEMA ELÉCTRICO Y PCB DE LA BOTONERA PARTE 1... RELACIÓN
ROBOT ESCORNABOT BRIVOI Guía de Montaje 1 ÍNDICE INTRODUCCIÓN...3 ELEMENTOS ELÉCTRICOS...3 ESQUEMA DE BLOQUES DEL ROBOT BRIVOI...3 LA BOTONERA...3 ESQUEMA ELÉCTRICO Y PCB DE LA BOTONERA PARTE 1... RELACIÓN
SUPER CONTROLADOR DE SERVOS S310175
 SUPER CONTROLADOR DE SERVOS S310175 Controlador para servos con retroalimentación del par motor No es necesario realizar modificaciones a los servos Características: Sus ocho salidas independientes de
SUPER CONTROLADOR DE SERVOS S310175 Controlador para servos con retroalimentación del par motor No es necesario realizar modificaciones a los servos Características: Sus ocho salidas independientes de
UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLOGICOS ELECTRONICA
 CICLO 01-2015 UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLOGICOS ELECTRONICA GUIA DE LABORATORIO Nº 6 Nombre de la práctica: Control de Motores Lugar de ejecución: Laboratorio 3.23 (CITT) Tiempo estimado:
CICLO 01-2015 UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLOGICOS ELECTRONICA GUIA DE LABORATORIO Nº 6 Nombre de la práctica: Control de Motores Lugar de ejecución: Laboratorio 3.23 (CITT) Tiempo estimado:
UNIDAD 4 SERVO MOTORES
 UNIDAD 4 SERVO MOTORES MOTORES DE CC Son de los más comunes y económicos, y puedes encontrarlo en la mayoría de los juguetes a pilas. Construidos, por lo general, por dos imanes permanentes fijados en
UNIDAD 4 SERVO MOTORES MOTORES DE CC Son de los más comunes y económicos, y puedes encontrarlo en la mayoría de los juguetes a pilas. Construidos, por lo general, por dos imanes permanentes fijados en
SERVOMOTORES. Para usar la librería del servomotor primero tiene que importarla. Esto añade nuevas funciones al sketch desde la librería.
 SERVOMOTORES Los servomotores son un tipo especial de motores que no giran continuamente sino que se mueven a una posición específica y permanecen en ella hasta que se ordene que se muevan de nuevo. Los
SERVOMOTORES Los servomotores son un tipo especial de motores que no giran continuamente sino que se mueven a una posición específica y permanecen en ella hasta que se ordene que se muevan de nuevo. Los
CEROS Y UNOS. PLACA CONTROLADORA. Al puerto paralelo. A una pila v DC E2 E3 E4 E5 E6 E7. S5 S6 S7 S8 0v 5v 12v
 CEROS Y UNOS. Los ordenadores son dispositivos que internamente trabajan usando el denominado sistema binario de numeración. En él sólo se dispone de dos dígitos, el cero y el uno. 0 cero significa ausencia
CEROS Y UNOS. Los ordenadores son dispositivos que internamente trabajan usando el denominado sistema binario de numeración. En él sólo se dispone de dos dígitos, el cero y el uno. 0 cero significa ausencia
2- Sistema de comunicación utilizado (sockets TCP o UDP, aplicaciones, etc.):
:") UNIVERSIDAD DE SAN BUENAVENTURA SEDE BOGOTA INGENIERIA MECATRONICA GRUPO S.I.R.A TUTOR: MORIAN NAIR CALDERON INTEGRANTES: NICOLAS FELIPE CUBILLOS. NAYKOL ANDREY ESPITIA. CRISTIAN DANIEL GARCIA. CARLOS
UNIVERSIDAD DE SAN BUENAVENTURA SEDE BOGOTA INGENIERIA MECATRONICA GRUPO S.I.R.A TUTOR: MORIAN NAIR CALDERON INTEGRANTES: NICOLAS FELIPE CUBILLOS. NAYKOL ANDREY ESPITIA. CRISTIAN DANIEL GARCIA. CARLOS
INTRODUCCIÓN DESCRIPCIÓN... 4 Características Hardware... 4
 TARJETA ULN2003 TABLA DE CONTENIDO INTRODUCCIÓN... 3 DESCRIPCIÓN... 4 Características Hardware... 4 ETAPAS Y CARACTERISTICAS ESPECÍFICAS... 5 1. Entrada de voltaje... 5 2. Señales de entrada... 5 3. Salida
TARJETA ULN2003 TABLA DE CONTENIDO INTRODUCCIÓN... 3 DESCRIPCIÓN... 4 Características Hardware... 4 ETAPAS Y CARACTERISTICAS ESPECÍFICAS... 5 1. Entrada de voltaje... 5 2. Señales de entrada... 5 3. Salida
Puente H: cambio de giro y velocidad de motores DC.
 Puente H: cambio de giro y velocidad de motores DC. Por William David Galvis 1 26 Marzo del 2014 Puente H: El puente en H lleva su nombre gracias al aspecto físico del esquema básico de los interruptores
Puente H: cambio de giro y velocidad de motores DC. Por William David Galvis 1 26 Marzo del 2014 Puente H: El puente en H lleva su nombre gracias al aspecto físico del esquema básico de los interruptores
MANUAL DE USUARIO Como utilizar un servo motor con Arduino REV. 1.0
 MANUAL DE USUARIO Como utilizar un servo motor con Arduino REV. 1.0 Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. +56 2 23339579 www.olimex.cl cursos.olimex.cl info@olimex.cl
MANUAL DE USUARIO Como utilizar un servo motor con Arduino REV. 1.0 Ingeniería MCI Ltda. Luis Thayer Ojeda 0115 of. 1105, Providencia, Santiago, Chile. +56 2 23339579 www.olimex.cl cursos.olimex.cl info@olimex.cl
AR 12 L. Tutorial 12: Motor DC + Potenciómetro. Objetivo. Materiales
 12 L Tutorial 12: Motor DC + Potenciómetro Objetivo En esta práctica conoceremos los ya antes mencionados motores dc, y aprenderemos a usarlos mediante un driver para su óptimo funcionamiento, y lo combinaremos
12 L Tutorial 12: Motor DC + Potenciómetro Objetivo En esta práctica conoceremos los ya antes mencionados motores dc, y aprenderemos a usarlos mediante un driver para su óptimo funcionamiento, y lo combinaremos
Fundamentos para programación y robótica Módulo 2 Programación y robótica Capítulo 3 TortuBots y NXT
 Módulo 2 Programación y robótica Capítulo 3 Agenda Generalidades sobre el kit Lego NXT Conceptos básicos de Lego NXT Operando el NXT con TortuBots Objetivos Aprender sobre el kit y familiarizarse con el
Módulo 2 Programación y robótica Capítulo 3 Agenda Generalidades sobre el kit Lego NXT Conceptos básicos de Lego NXT Operando el NXT con TortuBots Objetivos Aprender sobre el kit y familiarizarse con el
Robótica en la Universidad
 Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
MANUAL DE OPERACIÓN CONECTOR A IAC DE 2, 3, 4 Y 6 PINES CONECTOR B1 INYECTORES CONECTOR B2 INYECTORES LED INDICADORES MODO TRABAJO
 MANUAL DE OPERACIÓN CONECTOR A IAC DE 2, 3, 4 Y 6 PINES CONECTOR B1 INYECTORES CONECTOR B2 INYECTORES LED INDICADORES MODO TRABAJO SELECTOR MODO DE TRABAJO LED INDICADORES DE TIEMPO SELECTOR DE TIEMPO
MANUAL DE OPERACIÓN CONECTOR A IAC DE 2, 3, 4 Y 6 PINES CONECTOR B1 INYECTORES CONECTOR B2 INYECTORES LED INDICADORES MODO TRABAJO SELECTOR MODO DE TRABAJO LED INDICADORES DE TIEMPO SELECTOR DE TIEMPO
MEMORIA COCHE TELEDIRIGIDO.
 MEMORIA COCHE TELEDIRIGIDO. Realizado por: -Clara-Luz Garcia Mena I.E.S Vicente Aleixandre -Sara Gutiérrez de Agüera 1/06/17 -Ángela Chocán Márquez ÍNDICE 1. Finalidad del sistema. 2. Búsqueda de información.
MEMORIA COCHE TELEDIRIGIDO. Realizado por: -Clara-Luz Garcia Mena I.E.S Vicente Aleixandre -Sara Gutiérrez de Agüera 1/06/17 -Ángela Chocán Márquez ÍNDICE 1. Finalidad del sistema. 2. Búsqueda de información.
Sesión II: Elementos de un Robot
 Sesión II: Elementos de un Robot Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Sesiones Robótica Comunidad de Madrid, UPSAM Abr, 2005 ÍNDICE Introducción Estructura mecánica Motores
Sesión II: Elementos de un Robot Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Sesiones Robótica Comunidad de Madrid, UPSAM Abr, 2005 ÍNDICE Introducción Estructura mecánica Motores
CONTROL VELOCIDAD Y SENTIDO DE MOTOR DC. (de
 CONTROL VELOCIDAD Y SENTIDO DE MOTOR DC (de http://diymakers.es/control-velocidad-y-sentido-de-motor-dc/) En este tutorial vamos a controlar la velocidad y el sentido de un motor DC a través de un potenciómetro
CONTROL VELOCIDAD Y SENTIDO DE MOTOR DC (de http://diymakers.es/control-velocidad-y-sentido-de-motor-dc/) En este tutorial vamos a controlar la velocidad y el sentido de un motor DC a través de un potenciómetro
MECÁNICA II CURSO 2004/05
 1.1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
1.1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
Práctica número 3 TERMISTOR NTC47000 (EMULADOR DEL HORNO DE CASA) SMR. 3Er Trimestre IES Onda.
 SMR. 3Er Trimestre IES Onda.") Práctica número 3 TERMISTOR NTC47000 (EMULADOR DEL HORNO DE CASA) SMR. 3Er Trimestre 2017. IES Onda. Objetivos: Crear un sistema que mantenga la temperatura aproximadamente constante a 50ºC, con una termorresistencia
Práctica número 3 TERMISTOR NTC47000 (EMULADOR DEL HORNO DE CASA) SMR. 3Er Trimestre 2017. IES Onda. Objetivos: Crear un sistema que mantenga la temperatura aproximadamente constante a 50ºC, con una termorresistencia
Práctica 5 Diseño de circuitos con componentes básicos.
 Práctica 5 Diseño de circuitos con componentes básicos. Descripción de la práctica: -Con esta práctica, se pretende realizar circuitos visualmente útiles con componentes más simples. Se afianzarán conocimientos
Práctica 5 Diseño de circuitos con componentes básicos. Descripción de la práctica: -Con esta práctica, se pretende realizar circuitos visualmente útiles con componentes más simples. Se afianzarán conocimientos
OKY2002: Arduino Uno Genérico
 OKY2002: Arduino Uno Genérico Básico NIVEL DE ENTRADA Estas tarjetas y módulos son los ideales para iniciar a programar un microcontrolador y adentrarte al mundo de la tecnología. Descripción El OKI2002
OKY2002: Arduino Uno Genérico Básico NIVEL DE ENTRADA Estas tarjetas y módulos son los ideales para iniciar a programar un microcontrolador y adentrarte al mundo de la tecnología. Descripción El OKI2002
Control de Motores Paso a Paso (Stepper motors)
") Control de Motores Paso a Paso (Stepper motors) Los motores paso a paso son ideales para la construcción de mecanismos en donde se requieren movimientos muy precisos. La característica principal de estos
Control de Motores Paso a Paso (Stepper motors) Los motores paso a paso son ideales para la construcción de mecanismos en donde se requieren movimientos muy precisos. La característica principal de estos
ELECTRICIDAD. Circuitos con Croclip.exe
 ELECTRICIDAD. Circuitos con Croclip.exe Abre el programa Crocodrile: tienes un acceso directo en el escritorio. Ve explicando en tu cuaderno cada uno de los circuitos indicando todo como en el ejemplo
ELECTRICIDAD. Circuitos con Croclip.exe Abre el programa Crocodrile: tienes un acceso directo en el escritorio. Ve explicando en tu cuaderno cada uno de los circuitos indicando todo como en el ejemplo
PRÁCTICAS ELECTRÓNICA ANALÓGICA
 TECNOLOGÍA PRÁCTICAS NIVEL: 4ºESO ELECTRÓNICA ANALÓGICA 1 LISTA DE MATERIALES... 2 2 CARACTERÍSTICAS DE ALGUNOS COMPONENTES... 3 2.1 RELÉS... 3 2.2 TRANSISTORES... 3 2.3 CIRCUITOS INTEGRADOS... 3 3 PLACA
TECNOLOGÍA PRÁCTICAS NIVEL: 4ºESO ELECTRÓNICA ANALÓGICA 1 LISTA DE MATERIALES... 2 2 CARACTERÍSTICAS DE ALGUNOS COMPONENTES... 3 2.1 RELÉS... 3 2.2 TRANSISTORES... 3 2.3 CIRCUITOS INTEGRADOS... 3 3 PLACA
Introducción al giroscopio.
 Introducción al giroscopio. Los giroscopios, o girómetros, son dispositivos que miden o mantienen el movimiento de rotación. MEMS (sistemas microelectromecánicos) giroscopios son pequeños sensores, de
Introducción al giroscopio. Los giroscopios, o girómetros, son dispositivos que miden o mantienen el movimiento de rotación. MEMS (sistemas microelectromecánicos) giroscopios son pequeños sensores, de
RB 4.1 GUIA DEL ALUMNO RB 4.1 MONTAJE DE UN ROBOT EVASOR DE OBJETOS. PROSERQUISA DE C.V. - Todos los Derechos Reservados
 MONTAJ D UN ROBOT VASOR D OBJTOS GUIA DL ALUMNO Montaje de un robot evasor de objetos. Montaje de un robot evasor de objetos. Objetivos. Montar un robot que funcione atumáticamente por medio de un sensor
MONTAJ D UN ROBOT VASOR D OBJTOS GUIA DL ALUMNO Montaje de un robot evasor de objetos. Montaje de un robot evasor de objetos. Objetivos. Montar un robot que funcione atumáticamente por medio de un sensor
S Circuito Next Step para Basic Stamp y Basic-X24.
 S310160 Circuito Next Step para Basic Stamp y Basic-X24. Nota: Lea atentamente este manual antes de proceder al montar este kit. Le recomendamos que trabaje con atención y lentamente. Debe comprobar cada
S310160 Circuito Next Step para Basic Stamp y Basic-X24. Nota: Lea atentamente este manual antes de proceder al montar este kit. Le recomendamos que trabaje con atención y lentamente. Debe comprobar cada
Controlador Motor paso a paso SEN-SMC-001
 Controlador Motor paso a paso SEN-SMC-001 Este controlador de motores paso a paso SEN-SMC-001 ofrece una solución sencilla y rápida a las necesidades de control y "micro-stepping" de motores paso a paso.
Controlador Motor paso a paso SEN-SMC-001 Este controlador de motores paso a paso SEN-SMC-001 ofrece una solución sencilla y rápida a las necesidades de control y "micro-stepping" de motores paso a paso.
Construct Your Dreams Shenzhen Maker Works Technology Co., Ltd. Soporte técnico:
 Construct Your Dreams Shenzhen Maker Works Technology Co., Ltd. Soporte técnico: support@makeblock.cc www.makeblock.cc :himakeblock : makeblock bbs.makeblock.cc Construct Your Dreams ÍNDICE mbot es un
Construct Your Dreams Shenzhen Maker Works Technology Co., Ltd. Soporte técnico: support@makeblock.cc www.makeblock.cc :himakeblock : makeblock bbs.makeblock.cc Construct Your Dreams ÍNDICE mbot es un
Ref. equipo: AD6B Fecha: Febrero 2011 Pg: 2 / 20 7 MANUAL DE PRÁCTICAS IMPORTANTE: Siempre, antes de realizar cualquier montaje o modificación sobre e
 Ref. equipo: AD6B Fecha: Febrero 2011 Pg: 1 / 20 7 MANUAL DE PRÁCTICAS... 2 7.1 DESCRIPCIÓN DEL EQUIPO... 2 7.1.1 DESCRIPCIÓN...2 7.1.2 POSIBILIDADES PRÁCTICAS...3 7.2 DESCRIPCIÓN DE LOS MÓDULOS... 4 7.2.1
Ref. equipo: AD6B Fecha: Febrero 2011 Pg: 1 / 20 7 MANUAL DE PRÁCTICAS... 2 7.1 DESCRIPCIÓN DEL EQUIPO... 2 7.1.1 DESCRIPCIÓN...2 7.1.2 POSIBILIDADES PRÁCTICAS...3 7.2 DESCRIPCIÓN DE LOS MÓDULOS... 4 7.2.1
ACTIVIDADES CON S4A (SCRATCH PARA ARDUINO) A.1.-
 A.1.-") ACTIVIDADES CON S4A (SCRATCH PARA ARDUINO) A.1.- Actividades previas Cargar el firmware de S4A (S4AFirmware16.ino) en la placa Arduino mediante el IDE de Arduino Conectar la placa Arduino al puerto USB
ACTIVIDADES CON S4A (SCRATCH PARA ARDUINO) A.1.- Actividades previas Cargar el firmware de S4A (S4AFirmware16.ino) en la placa Arduino mediante el IDE de Arduino Conectar la placa Arduino al puerto USB
Actuadores eléctricos - Motores
 Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
Brazo robótico con USB Interface PC C
 Brazo robótico con USB Interface PC Herramientas necesarias : Alicate Alicate de corte Destornillador 4 Pilas Este brazo robótico se conecta al ordenador personal de Windows USB, apto para Windows XP,
Brazo robótico con USB Interface PC Herramientas necesarias : Alicate Alicate de corte Destornillador 4 Pilas Este brazo robótico se conecta al ordenador personal de Windows USB, apto para Windows XP,
Controlador gran potencia BIKCONTIN35A
 Controlador gran potencia BIKCONTIN35A Los controladores de motor, son universales, por lo que puede funcionar casi con cualquier pequeña configuración de un motor de corriente continua sin escobillas.
Controlador gran potencia BIKCONTIN35A Los controladores de motor, son universales, por lo que puede funcionar casi con cualquier pequeña configuración de un motor de corriente continua sin escobillas.
Tutorial: Uso de Driver L298N para motores DC con Arduino
 Tutorial: Uso de Driver L298N para motores DC con Arduino El siguiente tutorial esta basado en el Driver dual para motores (Full-Bridge) L298N, ofrecido por ELECTRONILAB.CO. Puedes adquirir este módulo
Tutorial: Uso de Driver L298N para motores DC con Arduino El siguiente tutorial esta basado en el Driver dual para motores (Full-Bridge) L298N, ofrecido por ELECTRONILAB.CO. Puedes adquirir este módulo
- Compatible con HID y USB OTG - Window XP, Vista,7/8/10, Linux, Android OS (Con interfaz USB estándar)
") VER: 1.3 Introducción Gracias por comprar este mini teclado. Puede usarlo para correos electrónicos, chat, control remoto, entrada de mensajes y juegos. Es compatible con Smart TV, PC, Notebook, Mac OS,
VER: 1.3 Introducción Gracias por comprar este mini teclado. Puede usarlo para correos electrónicos, chat, control remoto, entrada de mensajes y juegos. Es compatible con Smart TV, PC, Notebook, Mac OS,
 S320120 MAXSONAR EZ1 SENSOR DE DISTANCIAS POR ULTRASONIDOS Información técnica Sensor de distancias por ultrasonido de alto rendimiento MaxSonar-EZ1 A 0,785 19,9 mm F 0,519 12,6 mm B 0,870 21,1 mm G 0,124
S320120 MAXSONAR EZ1 SENSOR DE DISTANCIAS POR ULTRASONIDOS Información técnica Sensor de distancias por ultrasonido de alto rendimiento MaxSonar-EZ1 A 0,785 19,9 mm F 0,519 12,6 mm B 0,870 21,1 mm G 0,124
5. CONSTRUCCIÓN a) Montar la plataforma móvil según sus instrucciones. b) Soldar un trozo de 20 cm de hilo rígido a los terminales de las reductoras.
 Montar la plataforma móvil según sus instrucciones. b) Soldar un trozo de 20 cm de hilo rígido a los terminales de las reductoras.") 1. OBJETIVOS Construir un coche seguidor de línea negra controlado por arduino. 2. FOTOGRAFÍA Leer todas las instrucciones y comprobar el listado de materiales antes de empezar el proyecto. 3. FUNCIONAMIENTO
1. OBJETIVOS Construir un coche seguidor de línea negra controlado por arduino. 2. FOTOGRAFÍA Leer todas las instrucciones y comprobar el listado de materiales antes de empezar el proyecto. 3. FUNCIONAMIENTO
Incluso la aplicación Bluetooth se creó con la aplicación MIT Inventor para que los principiantes puedan replicar y construir en la aplicación.
 www.candy-ho.com Contactanos 1139685940 ventas@candy-ho.com Mejico 3941 Unidad 1, Villa Martelli Lunes a Viernes 10:00 a 18:00 The Critter es un kit de robótica de rastreo controlado por Arduino impreso
www.candy-ho.com Contactanos 1139685940 ventas@candy-ho.com Mejico 3941 Unidad 1, Villa Martelli Lunes a Viernes 10:00 a 18:00 The Critter es un kit de robótica de rastreo controlado por Arduino impreso
Incorporan funciones especialmente diseñadas para el control de motores paso a paso bipolar:
 DRV8825 Incorporan funciones especialmente diseñadas para el control de motores paso a paso bipolar: - Regulador de intensidad (chopping) - Microstepping Voltaje Lógico: 3.3V - 5V DC Volvaje potencia:
DRV8825 Incorporan funciones especialmente diseñadas para el control de motores paso a paso bipolar: - Regulador de intensidad (chopping) - Microstepping Voltaje Lógico: 3.3V - 5V DC Volvaje potencia:
INTRODUCCIÓN A LOS SISTEMAS DE CONTROL PROGRAMADOS
 INTRODUCCIÓN A LOS SISTEMAS DE CONTROL PROGRAMADOS 1.- TIPOS DE SISTEMAS DE CONTROL Hasta ahora hemos trabajado con un sistema electromecánico cuyo funcionamiento hemos controlado mediante un circuito
INTRODUCCIÓN A LOS SISTEMAS DE CONTROL PROGRAMADOS 1.- TIPOS DE SISTEMAS DE CONTROL Hasta ahora hemos trabajado con un sistema electromecánico cuyo funcionamiento hemos controlado mediante un circuito
MANUAL DE USUARIO TARJETA DE CONTACTOS SECOS
 MANUAL DE USUARIO TARJETA DE CONTACTOS SECOS VALIDO PARA SAI INNOVA PLUS RT 1-3KVA Y SAI INNOVA PLUS 1-3KVA 1- DESCRIPCION: Tarjeta de contacto seco una opción del SAI, que se utiliza para proporcionar
MANUAL DE USUARIO TARJETA DE CONTACTOS SECOS VALIDO PARA SAI INNOVA PLUS RT 1-3KVA Y SAI INNOVA PLUS 1-3KVA 1- DESCRIPCION: Tarjeta de contacto seco una opción del SAI, que se utiliza para proporcionar
VISUALINO (Apuntes y Proyectos. Parte I)
") VISUALINO (Apuntes y Proyectos. Parte I) por BY - SA - NC Semáforo Parpadeo de LED Declarar variable global LED = 8 Escribir alternativamente valores digitales ALTO y BAJO. Positivo del LED al pin 8 Resistencia
VISUALINO (Apuntes y Proyectos. Parte I) por BY - SA - NC Semáforo Parpadeo de LED Declarar variable global LED = 8 Escribir alternativamente valores digitales ALTO y BAJO. Positivo del LED al pin 8 Resistencia
Robot de dibujo XY Plotter
 Robot de dibujo XY Plotter A través de esta guía, aprenderemos a hacer la máquina de dibujo XY Plotter. Con un robot de dibujo se puede dibujar imágenes en papel, en la pared, panel o A4. Puede imprimir
Robot de dibujo XY Plotter A través de esta guía, aprenderemos a hacer la máquina de dibujo XY Plotter. Con un robot de dibujo se puede dibujar imágenes en papel, en la pared, panel o A4. Puede imprimir
Curso: Equipo: Fecha: En esta primera práctica se realiza en el circuito marcado como número 1:
 Curso: Equipo: Fecha: Grupo: Integrantes: Practica: 1 Recorrer la línea En esta primera práctica se realiza en el circuito marcado como número 1: Recordar que para pasar el programa al robot hay que conectarlo
Curso: Equipo: Fecha: Grupo: Integrantes: Practica: 1 Recorrer la línea En esta primera práctica se realiza en el circuito marcado como número 1: Recordar que para pasar el programa al robot hay que conectarlo
CONTROL DE MOTORES UTILIZANDO LOS MICROCONTROLADORES PIC16F87x
 CTROL DE MOTORES UTILIZANDO LOS MICROCTROLADORES PICF8x CURSO 00/0 CTROL DE MOTORES. Control de Motores de Corriente Continua. Control de Motores Paso a Paso CTROL DE MOTORES DE CORRIENTE CTINUA El control
CTROL DE MOTORES UTILIZANDO LOS MICROCTROLADORES PICF8x CURSO 00/0 CTROL DE MOTORES. Control de Motores de Corriente Continua. Control de Motores Paso a Paso CTROL DE MOTORES DE CORRIENTE CTINUA El control
CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO
 CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO 1 Nombre, apellidos y correo electrónico de EducaMadrid del participante Elena Ribón Villamediana José Antonio Cobo
CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO 1 Nombre, apellidos y correo electrónico de EducaMadrid del participante Elena Ribón Villamediana José Antonio Cobo
Programa tu sistema de aviso de la distancia de seguridad.
 Programa tu sistema de aviso de la distancia de seguridad. En este proyecto crearás un sistema que te permita alertar a los coches o ciclistas de que no están cumpliendo con la distancia de seguridad adecuada.
Programa tu sistema de aviso de la distancia de seguridad. En este proyecto crearás un sistema que te permita alertar a los coches o ciclistas de que no están cumpliendo con la distancia de seguridad adecuada.
LLAVE DE CRUCE. Experimento creado por: Rosana Álvarez García. Introducción Actividades Evaluación Conclusión
 LLAVE DE CRUCE Experimento creado por: Rosana Álvarez García Introducción Introducción Actividades Evaluación Conclusión En este trabajo vamos a analizar el cambio del sentido de giro de un motor al cambiar
LLAVE DE CRUCE Experimento creado por: Rosana Álvarez García Introducción Introducción Actividades Evaluación Conclusión En este trabajo vamos a analizar el cambio del sentido de giro de un motor al cambiar