ESCUELA SUPERIOR POLITÉCNICA DEL LITORAL FACULTAD DE INGENIERÍA EN ELECTRICIDAD Y COMPUTACIÓN
|
|
|
- María Mercedes Alarcón Henríquez
- hace 6 años
- Vistas:
Transcripción
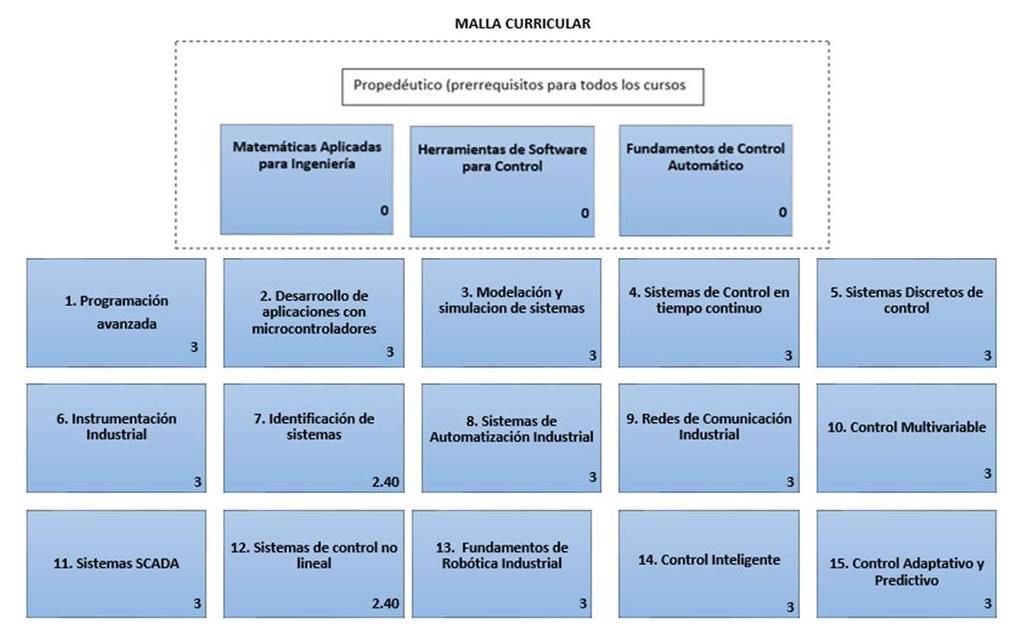
1 Planificación Curricular Nombre de la asignatura PLAN DE ESTUDIO ciclo, Programación Introducción a la programación en VB.NET. Variables Constantes. Estructuras y arreglos Condicionales y bucles. Funciones y procedimientos. Introducción a la P.O.O. en VB.NET. Conceptos generales. ASP.NET. Introducción. Diseño de formularios. Componentes. Programación en ASP.NET. Cookies. Acceso a Bases de Datos (ADO.NET). Presentación de ADO.NET. Acceso a datos. Creación de un Data Set. Recuperación de la estructura. de conexión. Enlace ADO.NET y XML. Componentes y capacidades de impresión (reportes) de los datos (Cristal Reports) Migración de VB6.0 a VB.NET. Pruebas de Incompatibilidad. Curso 1 3 Desarrollo de Aplicaciones con Microcontroladores Elementos básicos de la Arquitectura de las Microcomputadoras, Microprocesadores y Microcontroladores. Arquitectura interna Von Newman y Harvard. Comparación entre ambas. Microcontroladores con Repertorio de Instrucciones CISC y RISC. Principales aplicaciones de sistemas con Microcontroladores. Principales fabricantes de Microcontroladores. El Repertorio de Instrucciones, Modos de direccionados. Principales herramientas para la simulación y puesta a punto de sistemas basados en estos Microcontrolador. Los Temporizadores. Características de su funcionamiento. Su programación. Diferentes Modos de Trabajo. La atención de los mismos, por Encuesta o por rupción. Utilización de los Temporizadores en la generación de tiempos de demora, en los sistemas de adquisición de datos, en los sistemas de comunicación serie, en el conteo de eventos que ocurren externamente. Desarrollo de aplicaciones basadas en Microcontroladores. Conexión de elementos no digitales al Microcontrolador, LEDs, ruptores, Teclas, Lámparas de 7 Segmentos, Relay, Optoacopladores, etc. Conexión de Teclados y Display a Cristal Curso 2 3 1
2 Nombre de la asignatura Modelación y Simulación de Sistemas Concepto y clasificación de sistemas. Modelos. Tipos de modelo. Modelos matemáticos continuos. Modelos de estado estacionario y modelos dinámicos. Modelos dinámicos discretos. Modelos típicos, continuos y discretos. Respuesta temporal de los modelos típicos a señales de prueba. Representación gráfica de los sistemas dinámicos. Diagrama de bloques y gráfico de flujo de señal. Concepto de simulación. Solución numérica de la ecuación diferencial. Métodos de simple paso y de paso múltiple. Ajuste automático del paso de integración. Métodos operacionales. Sistemas rígidos. Simulación de sistemas mediante programas elaborados de alto nivel. Lenguajes de simulación. Metodología de trabajo con los lenguajes de simulación orientados a bloques. Aplicaciones. Construcción de modelos de sistemas físicos. Tratamiento unificado de los sistemas. Metodología general para la obtención del modelo dinámico por métodos analíticos. Sistemas hidráulicos, neumáticos, térmicos, químicos, mecánicos y electromecánicos. Sistemas con parámetros distribuidos. Sistemas con más de una capacidad. Obtención del modelo por métodos experimentales. Métodos de respuesta al paso, respuesta de frecuencia, respuesta al pulso y a señales seudo-aleatorias. ciclo, Curso 3 3 Sistemas de en Tiempo Continuo Introducción. Definiciones básicas de un sistema de control. Etapas fundamentales en el diseño de sistemas de control basados en modelos: objetivos, selección de variables, obtención del modelo, selección de la configuración y de la estrategia de control. Algoritmo de controladores basados en modelos, controladores de estructura PID Representación de un sistema mediante la descripción entrada-salida Representación de sistemas en el espacio de estados. Relación entre la función de transferencia de un sistema y su representación en variables de estado. Descripción matemática de sistemas lineales. La solución de la ecuación de estado. Propiedades de la matriz de transición. Formas canónicas controlable, observable, diagonal y de Jordan. Realizaciones mínimas. abilidad y observabilidad de los sistemas de control lineal invariantes en el tiempo. Curso 4 3 Sistemas Discretos de Elementos básicos de sistemas de control discreto. Teorema del muestreo. Transformada Z y su inversa. Transformada Z modificada y su inversa. Funciones transferenciales de sistemas discretos. Diseño de sistemas de control discreto. Análisis de estabilidad de sistemas discretos. Criterio de Jury. Trans bilineal. Representación de sistemas discretos en el espacio de estado. Análisis de estabilidad de sistemas discretos. Método de Liapunov. Diseño de sistemas discretos en el espacio de estado. Observadores de estado. Aplicaciones. Curso 5 3 2
3 Nombre de la asignatura ciclo, Instrumentación Industrial Virtual.- Labview LabView Basics: Barra de herramientas del Panel Frontal, Barra de Herramientas del Diagrama de Bloques, Paleta de Herramientas, Paletas de, Paleta de Funciones. Instrumento Virtual: Qué son los instrumentos virtuales, el panel frontal, el diagrama de bloques, Construcción de VI, Técnicas de edición y puesta a punto, Sub VIs. Estructuras: El lazo For, El lazo While, Registros de desplazamiento, Nodos de realimentación, Estructuras Case, Estructuras de secuencia, el nodo de fórmula, acceso a Matlab, arreglos y empaquetamientos, Polimorfismos. Cartas y Gráficos, Adquisición de Datos, Instrumentos de. Análisis: Algebra Lineal, Linealización de curvas, ecuaciones diferenciales, Zeros de funciones, Integración y diferenciación,. Generación de señales. Procesamiento de señales. Disciplinar, Multi- Curso 6 3 Identificación de sistemas Introducción. Clasificación de los criterios de identificación. Modelos para el control. Métodos no paramétricos de identificación de sistemas. Las matemáticas de la estimación y el control. Métodos frecuenciales de identificación. Identificación estructural. Métodos paramétricos de identificación de sistemas. Métodos de identificación por correlación. Métodos de identificación recursiva. Selección y validación de modelos. Solución de problemas utilizando MATLAB. Disciplinar, Multi- Curso Sistemas de Automatización Industrial Autómatas programables Generalidades. Arquitectura externa y arquitectura interna. Diferentes tipos de Autómatas. faces de entrada y salida lógicas, digitales y analógicas, interfaces específicas. Conexionado. Selección de paneles. Programación de autómatas. Introducción. Estructuras de programación. Programación lineal. Programación estructurada. Programación modular. Programación multitarea. Identificación de variables y direccionado. Lenguajes de programación. Lenguajes booleanos y lista de instrucciones, diagramas de contactos, planos de funciones, lenguajes de alto nivel. Programación con E/S digitales y analógicas. Programación de bloques funcionales, biestables, temporizadores, contadores, registros de desplazamiento, funciones de expansión, funciones de carga y transferencia, comparaciones de datos, instrucciones lógicas entre palabras, funciones aritméticas. Funciones de comunicación. Instrucciones especiales. Automatización con diagramas de flujo. Redes de Petri. Grafcet. Introducción a los sistemas SCADA. Sistemas automatizados. Instalación, mantenimiento y diagnóstico de fallas. Aplicaciones. Disciplinar, Multi- Curso 8 3 3
4 Nombre de la asignatura Redes de Comunicación Industrial Modelos de referencia OSI. Redes locales industriales. Topología de las redes LAN. Nivel físico de la red. Cables. Fibra óptica. Radio. Sincronización de bit. Sincronización de caracteres. Sincronización de bloques de mensajes. Codificación. Diferentes tipos NRZ, NRZI, Manchester, AMI, CMI, etc. Enlaces estándar. RS-232, RS-422 y RS Estructura lógica de las LAN. de acceso al medio. centralizado y control descentralizado. Paso de testigo, CSMA/CD. lógico de enlaces. Enlace punto a punto, enlace con un grupo y enlace difundido. de errores. Errores a nivel de caracteres. Errores de Sincronización. Errores a nivel de mensaje. Buses de campo: MODBUS, características, protocolo. JBUS, características, protocolo. BITBUS, características, protocolo. PROFIBUS, características, protocolo. Ethernet, características, protocolo. Aplicaciones de redes industriales. ciclo, Curso 9 3 Multivariable Introducción. Sistemas multientrada-multisalidas (MIMO). Representación en el espacio de estado de sistemas definidos por su función de transferencia. Trans de modelos de sistemas. Métodos de solución de la ecuación de estado. Resultados útiles en el análisis matricial. abilidad. Observabilidad. Estabilidad, estabilizabilidad y detectabilidad. por desacoplamiento. acción. Pareo de variables controladas y manipuladas, matriz de ganancias relativas. multivariable desacoplado. Diseño del desacoplador. Sintonización del controlador. Diseño de sistemas multivariables en el espacio de estado. Método de asignación de polos. Diseño de observadores de estado. Aplicaciones. Sistema de control óptimo cuadrático. Solución de problemas utilizando Matlab. Curso 10 3 Sistemas Scada Introducción a la asignatura. Definición, objetivos y funciones de los SCADA. Estado del arte. Tipos de SCADA. Protocolos comunes. El estándar OPC. Estructura de un paquete SCADA. Monitorización y gestión de alarmas con un SCADA. Criterios para el diseño de pantallas, simbologías utilizadas, etc. Cálculo del tiempo de refrescamiento de las variables. Comunicación con los elementos de campo. Configuración de variables. Selección de drivers y puertos. Comunicación con la red local. Herramientas. Tratamiento primario de la in, alarmas. Tratamiento de alarmas, gráficos de tendencias, y bancos históricos de datos. Elaboración de rutinas batch y scripts de pantalla y de la aplicación. Animaciones. Aplicaciones. Diseño de pantallas y ejemplos específicos de rutinas con un SCADA profesional. Curso
5 Nombre de la asignatura ciclo, Sistemas de No lineal Robótica Industrial Inteligente Introducción. Análisis y diseño de sistemas de control no lineales mediante linealización aproximada. La linealización aproximada. Fundamentación matemática. Análisis de un sistema de control no lineal linealizado en forma aproximada. Rango de validez de la solución. Diseño de sistemas de control para sistemas no lineales, linealizados en forma aproximada. Utilización de observadores de estado. Estabilidad de los sistemas no lineales, linealizados en forma aproximada. Ejemplos de aplicaciones Análisis y diseño de sistemas de control no lineales mediante linealización extendida. La linealización extendida. Fundamentación matemática. Análisis de un sistema de control no lineal cuando se usa linealización extendida. Rango de validez de la solución. Diseño de sistemas de control para sistemas no lineales por linealización extendida. Ejemplos de aplicaciones Análisis y diseño de sistemas de control no lineales mediante linealización exacta. La linealización exacta. Fundamentación matemática. Análisis de un sistema de control no lineal linealizado en forma exacta. Diseño de sistemas de control para sistemas no lineales, linealizados en forma exacta. La dinámica de los ceros. Ejemplos de aplicaciones. discontinuo de sistemas no lineales Historia de la robótica. Impacto social e industrial de la robótica. Aplicaciones. Tipos de robots. Robots manipuladores y robots móviles. Sistemas teleoperados. Inteligencia y autonomía de robots. Criterios de Implantación de robots. Seguridad en instalaciones robotizadas. Actuadores: Actuadores eléctricos, hidráulicos, neumáticos, microactuadores. Modelos físicos. Sensores: Sensores internos y del entorno. Sensores de posición. Precisión y repetitividad. Sensores de velocidad. Sensores de Aceleración. Sensores de fuerza y par. Sensores de distancias. Visión Artificial. Percepción táctil. Morfología, Cinemática y Dinámica: Tipos de coordenadas. Espacios de representación. Coordenadas propias y coordenadas del mundo. Coordenadas de estado y grados de libertad. Problema cinemático directo e inverso. Elementos y enlaces. Matrices de trans. Localización y orientación del elemento terminal: ángulos de Euler y RPY. Configuraciones. Volumen de trabajo. Consideraciones computacionales. Redundancia. Ecuaciones de Newton-Euler. Ecuaciones de Lagrange. Planificación y Generación de trayectorias: Especificación de trayectorias. polación de coordenadas propias. polación por polinomios. Trayectorias con segmentos lineales y uniones parabólicas. Generación de trayectorias en el espacio cartesiano. Programación Robots: Programación por aprendizaje o guiado. Programación de trayectorias. Programación de tareas. Diseño y programación de una célula robotizada. Programación de sistemas Introducción a la asignatura. Conceptos básicos de inteligencia artificial. Sistemas de conocimiento. inteligente. Redes Neuronales Artificiales. Conceptos básicos. Tipos de arquitectura, modelos, tipos de entrenamiento supervisado y no supervisado, validación del aprendizaje, criterios de parada. Diseño de controladores neuronales por el modelo directo y el modelo inverso. Identificación con Redes Neuronales. Ejemplos de Aplicaciones. Lógica difusa. Conceptos básicos. Operadores y operaciones sobre conjuntos difusos. Reglas de inferencia. adores difusos. Procesos de fuzzificación y defuzzificación. Sistemas adaptativos difusos. Ejemplos de aplicaciones por Hardware y Software. Algoritmos Genéticos. Conceptos básicos. Población, cromosoma, cruzamiento, mutación, y representación de estos conceptos. Criterios de parada, aplicaciones en el control óptimo y en la identificación de sistemas. Introducción a las Herramientas o Toolbox de Matlab para diseño de Redes Neuronales y adores Difusos. Funciones principales. Ejercicios. Curso Curso 13 3 Curso
6 Nombre de la asignatura Adaptativo y Predictivo Conceptos básicos. Estructura y clasificación de los sistemas de control adaptativos. Principio de diseño de sistemas de control adaptativos. adaptativo por modelos de referencia. adaptativo de sistemas con retardo de tiempo. Aplicaciones. Introducción al control predictivo. Modelos de procesos para el control predictivo. Modelos de planta. Modelos de perturbación. Modelos de predicción. Reguladores predictivos. El regulador DMC. predictivo generalizado GPC. PFC. Otros reguladores. Selección de parámetros en un controlador predictivo. Ejemplos de aplicación. Análisis de controladores predictivos. Aspectos de robustez y estabilidad en control predictivo. predictivo con restricciones. Restricciones duras y blandas. Algoritmos de cálculo. Ejemplos de aplicación. predictivo multivariable. Formulación del controlador DMC. Ejemplos de aplicación. Optimización de consignas en control predictivo. adores industriales. Aspectos de operación. Metodología de diseño e implementación de controladores predictivos. Ejemplos de aplicación. ciclo, Curso 15 3 Seminario de Graduación (Metodología de la Científica) Conocer el proceso metodológico de la investigación científica y los fundamentos de una buena redacción técnica y científica. Aplicar los conceptos y herramientas básicos de la metodología de la investigación científica. Elaborar un protocolo de tesis de graduación. Al finalizar el curso, los estudiantes valorarán la metodología de la investigación científica como un acervo de conceptos, técnicas y herramientas de gran utilidad para la generación de nuevos conocimientos en el área de automatización, que requiere de un compromiso ético y social a efectos de que el conocimiento creado sirva a la sociedad. Unidad de Titulación Epistemológica Seminario de Graduación
7 7
Contenido. Prefacio... Acerca de los autores...
 Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
Prefacio. 1 Sistemas de control
 INGENIERIA DE CONTROL por BOLTON Editorial Marcombo Prefacio 1 Sistemas de control Sistemas Modelos Sistemas en lazo abierto y cerrado Elementos básicos de un sistema en lazo abierto Elementos básicos
INGENIERIA DE CONTROL por BOLTON Editorial Marcombo Prefacio 1 Sistemas de control Sistemas Modelos Sistemas en lazo abierto y cerrado Elementos básicos de un sistema en lazo abierto Elementos básicos
MECATRONICA Editorial Marcombo. Prefacio
 MECATRONICA Editorial Marcombo Prefacio 1. Mecatrónica 1.1. Qué es la mecatrónica? 1.2. Sistemas 1.3. Sistemas de medición 1.4. Sistemas de control 1.5. Controladores basados en un microprocesador 1.6.
MECATRONICA Editorial Marcombo Prefacio 1. Mecatrónica 1.1. Qué es la mecatrónica? 1.2. Sistemas 1.3. Sistemas de medición 1.4. Sistemas de control 1.5. Controladores basados en un microprocesador 1.6.
ROBOTICA por OLLERO BATURONE Editorial Marcombo. Foreword Prólogo Prefacio del autor
 ROBOTICA por OLLERO BATURONE Editorial Marcombo Foreword Prólogo Prefacio del autor CAPÍTULO 1. Introducción 1.1. Robótica 1.2. Esquema general del sistema robot 1.3. Robots manipuladores 1.3.1. Sistema
ROBOTICA por OLLERO BATURONE Editorial Marcombo Foreword Prólogo Prefacio del autor CAPÍTULO 1. Introducción 1.1. Robótica 1.2. Esquema general del sistema robot 1.3. Robots manipuladores 1.3.1. Sistema
Instrumentación virtual (Aplicaciones Educativas) José Manuel Ruiz Gutiérrez
 José Manuel Ruiz Gutiérrez") Instrumentación virtual (Aplicaciones Educativas) INDICE 1.- Conceptos Generales sobre Instrumentación 2.- Areas de Aplicación de la Instrumentación Virtual 3.- Arquitectura Básica de un Sistema de Adquisición
Instrumentación virtual (Aplicaciones Educativas) INDICE 1.- Conceptos Generales sobre Instrumentación 2.- Areas de Aplicación de la Instrumentación Virtual 3.- Arquitectura Básica de un Sistema de Adquisición
Departamento Ingeniería en Sistemas de Información
 ASIGNATURA: TEORIA DE CONTROL MODALIDAD: Cuatrimestral DEPARTAMENTO: ING. EN SIST. DE INFORMACION HORAS SEM.: 8 horas AREA: MODELOS HORAS/AÑO: 128 horas BLOQUE TECNOLOGÍAS BÁSICAS HORAS RELOJ 96 NIVEL:
ASIGNATURA: TEORIA DE CONTROL MODALIDAD: Cuatrimestral DEPARTAMENTO: ING. EN SIST. DE INFORMACION HORAS SEM.: 8 horas AREA: MODELOS HORAS/AÑO: 128 horas BLOQUE TECNOLOGÍAS BÁSICAS HORAS RELOJ 96 NIVEL:
PROGRAMA RESUMIDO DE CURSOS
 PROGRAMA RESUMIDO DE CURSOS Curso: Operación de sistemas eléctricos de potencia y centros de control PROGRAMA GENERAL MODULO I: MODULO II: MODULO III: MODULO IV: MODULO V: MODULO VI: Flujos de potencia
PROGRAMA RESUMIDO DE CURSOS Curso: Operación de sistemas eléctricos de potencia y centros de control PROGRAMA GENERAL MODULO I: MODULO II: MODULO III: MODULO IV: MODULO V: MODULO VI: Flujos de potencia
Diplomado en Mecatrónica
 Diplomado en Mecatrónica Hoy en día muchos procesos y productos son considerados como mecatrónicos por su gran complejidad como por los componentes de que están integrados (mecánicos, eléctricos, electrónicos,
Diplomado en Mecatrónica Hoy en día muchos procesos y productos son considerados como mecatrónicos por su gran complejidad como por los componentes de que están integrados (mecánicos, eléctricos, electrónicos,
PROYECTO DE INVESTIGACION por Universidad Nacional del Callao se encuentra bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivadas 2.
 PROYECTO DE INVESTIGACION por Universidad Nacional del Callao se encuentra bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivadas 2.5 Perú. Permisos que vayan más allá de lo cubierto por
PROYECTO DE INVESTIGACION por Universidad Nacional del Callao se encuentra bajo una Licencia Creative Commons Atribución-NoComercial-SinDerivadas 2.5 Perú. Permisos que vayan más allá de lo cubierto por
Departamento Ingeniería en Sistemas de Información
 ASIGNATURA: TEORIA DE CONTROL MODALIDAD: Cuatrimestral DEPARTAMENTO: ING. EN SIST. DE INFORMACION HORAS SEM.: 6 horas AREA: MODELOS HORAS/AÑO: 96 horas BLOQUE TECNOLOGÍAS BÁSICAS HORAS RELOJ 72 NIVEL:
ASIGNATURA: TEORIA DE CONTROL MODALIDAD: Cuatrimestral DEPARTAMENTO: ING. EN SIST. DE INFORMACION HORAS SEM.: 6 horas AREA: MODELOS HORAS/AÑO: 96 horas BLOQUE TECNOLOGÍAS BÁSICAS HORAS RELOJ 72 NIVEL:
Distinguir correctamente las ventajas y desventajas de la lógica cableada y de la lógica programada con PLC.
 Programas de Actividades Curriculares Plan 94A Carrera: Ingeniería Mecánica AUTOMATIZACIÓN INDUSTRIAL Área: Bloque: Eléctrica Tecnologías Básicas Nivel: 4º año Tipo: Electiva Modalidad: Anual Carga Horaria
Programas de Actividades Curriculares Plan 94A Carrera: Ingeniería Mecánica AUTOMATIZACIÓN INDUSTRIAL Área: Bloque: Eléctrica Tecnologías Básicas Nivel: 4º año Tipo: Electiva Modalidad: Anual Carga Horaria
INGENIERÍA EN MANTENIMIENTO INDUSTRIAL HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS
 HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Sistemas Automatizados y Redes Industriales 2. Competencias Validar estudios de ingeniería y proyectos técnicoeconómicos
HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Sistemas Automatizados y Redes Industriales 2. Competencias Validar estudios de ingeniería y proyectos técnicoeconómicos
Robótica I ACB Participantes Comité para el Diseño de Especialidad de la DIET. Academia de Sistemas Digitales de la DIET
 1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
1. DATOS DE LA ASIGNATURA. Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría Horas práctica Créditos: Robótica I Ingeniería Electrónica ACB - 0802 4 0 8 2. HISTORIA DEL PROGRAMA. Lugar
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE INTEGRACIÓN DE SISTEMAS AUTOMÁTICOS
 TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE INTEGRACIÓN DE SISTEMAS AUTOMÁTICOS 1. Competencias Desarrollar y conservar sistemas automatizados
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE INTEGRACIÓN DE SISTEMAS AUTOMÁTICOS 1. Competencias Desarrollar y conservar sistemas automatizados
Configuración. Tipos de procesadores en la CPU
 Configuración Unidad de control (UC) o Arquitectura de las tarjetas o Arquitectura del sistema o Redundancia Sistemas de E/S Sistemas de Memoria masiva Tipos de procesadores en la CPU Varios procesadores
Configuración Unidad de control (UC) o Arquitectura de las tarjetas o Arquitectura del sistema o Redundancia Sistemas de E/S Sistemas de Memoria masiva Tipos de procesadores en la CPU Varios procesadores
Metodología de diseño de Sistemas de Control
 Metodología de diseño de Sistemas de Control Tema 2 1 Conocimiento del problema Explotación Definición de las especificaciones Test Metodología de diseño de Sistemas de Control...proceso iterativo Modelado
Metodología de diseño de Sistemas de Control Tema 2 1 Conocimiento del problema Explotación Definición de las especificaciones Test Metodología de diseño de Sistemas de Control...proceso iterativo Modelado
Unidad I Análisis de Sistemas Realimentados
 Prof. Gerardo Torres - gerardotorres@ula.ve - Cubículo 003 Departamento de Circuitos y Medidas de la Escuela de Ingeniería Eléctrica de la Universidad de Los Andes Unidad I Análisis de Sistemas Realimentados
Prof. Gerardo Torres - gerardotorres@ula.ve - Cubículo 003 Departamento de Circuitos y Medidas de la Escuela de Ingeniería Eléctrica de la Universidad de Los Andes Unidad I Análisis de Sistemas Realimentados
INSTRUMENTACIÓN VIRTUAL APLICADA AL ESTUDIO DE SISTEMAS COMPLEJOS
 INSTRUMENTACIÓN VIRTUAL APLICADA AL ESTUDIO DE SISTEMAS COMPLEJOS Etapas de la Investigación Referencias INDICE CAPITULO 1: INTRODUCCIÓN A LA INSTRUMENTACIÓN VIRTUAL 1.1 Arquitectura de Computadoras 1.1.2
INSTRUMENTACIÓN VIRTUAL APLICADA AL ESTUDIO DE SISTEMAS COMPLEJOS Etapas de la Investigación Referencias INDICE CAPITULO 1: INTRODUCCIÓN A LA INSTRUMENTACIÓN VIRTUAL 1.1 Arquitectura de Computadoras 1.1.2
Carrera: ACM Participantes. Academia Eléctrica y Electrónica del Instituto Tecnológico Superior de Coatzacoalcos
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Controladores Lógicos Programables Ingeniería Electrónica ACM-0801 3-3 - 8 2.-
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Controladores Lógicos Programables Ingeniería Electrónica ACM-0801 3-3 - 8 2.-
Introducción a los Sistemas de Control
 Introducción a los Sistemas de Control Organización de la presentación - Introducción a la teoría de control y su utilidad - Ejemplo simple: modelado de un motor de continua que mueve una cinta transportadora.
Introducción a los Sistemas de Control Organización de la presentación - Introducción a la teoría de control y su utilidad - Ejemplo simple: modelado de un motor de continua que mueve una cinta transportadora.
Síntesis de la programación
 Síntesis de la programación Robótica industrial 2º ARI 22 de febrero de 2017 Tabla de Contenidos 1. Secuenciación de contenidos...1 2. Unidades de trabajo...2 2.1. Programación de una estación para fabricación
Síntesis de la programación Robótica industrial 2º ARI 22 de febrero de 2017 Tabla de Contenidos 1. Secuenciación de contenidos...1 2. Unidades de trabajo...2 2.1. Programación de una estación para fabricación
INGENIERÍA PROFESIONAL EN INOCUIDAD ALIMENTARIA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ROBÓTICA
 INGENIERÍA PROFESIONAL EN INOCUIDAD ALIMENTARIA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ROBÓTICA UNIDADES DE APRENDIZAJE 1. Competencias Automatizar procesos de producción mediante la implementación
INGENIERÍA PROFESIONAL EN INOCUIDAD ALIMENTARIA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE ROBÓTICA UNIDADES DE APRENDIZAJE 1. Competencias Automatizar procesos de producción mediante la implementación
Programa de Automatización Industrial
 Programa de Automatización Industrial GRUPO NO. 2 (JUEVES) Dirigido a: Técnicos e ingenieros con conocimientos básicos en electricidad. Perfil: Al finalizar el estudiante tendrá la capacidad de desarrollarse
Programa de Automatización Industrial GRUPO NO. 2 (JUEVES) Dirigido a: Técnicos e ingenieros con conocimientos básicos en electricidad. Perfil: Al finalizar el estudiante tendrá la capacidad de desarrollarse
Línea de investigación o de trabajo: Electrónica de Potencia y Control Automático
 ASIGNATURA: TEORÍA DE SISTEMAS LINEALES Nombre de la asignatura: TEORÍA DE SISTEMAS LINEALES Línea de investigación o de trabajo: Electrónica de Potencia y Control Automático Tiempo de dedicación del estudiante
ASIGNATURA: TEORÍA DE SISTEMAS LINEALES Nombre de la asignatura: TEORÍA DE SISTEMAS LINEALES Línea de investigación o de trabajo: Electrónica de Potencia y Control Automático Tiempo de dedicación del estudiante
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CONTROLADORES LÓGICOS PROGRAMABLES
 TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CONTROLADORES LÓGICOS PROGRAMABLES 1. Competencias Desarrollar y conservar sistemas automatizados
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CONTROLADORES LÓGICOS PROGRAMABLES 1. Competencias Desarrollar y conservar sistemas automatizados
Programa de Automatización Industrial GRUPO 2
 Programa de Automatización Industrial GRUPO 2 Perfil: Al finalizar el estudiante tendrá la capacidad de desarrollarse en el diseño y/o mantenimiento de pequeños proyectos de automatización que contengan
Programa de Automatización Industrial GRUPO 2 Perfil: Al finalizar el estudiante tendrá la capacidad de desarrollarse en el diseño y/o mantenimiento de pequeños proyectos de automatización que contengan
TEMARIO DE PROFESORES TÉCNICOS DE F.P. : SISTEMAS Y APLICACIONES INFORMÁTICAS. Octubre 1997 (Publicado en el B.O.E. de 13 de Febrero de 1.
 TEMARIO DE PROFESORES TÉCNICOS DE F.P. : SISTEMAS Y APLICACIONES INFORMÁTICAS. Octubre 1997 (Publicado en el B.O.E. de 13 de Febrero de 1.996) SISTEMAS Y APLICACIONES INFORMÁTICAS 1. Representación y comunicación
TEMARIO DE PROFESORES TÉCNICOS DE F.P. : SISTEMAS Y APLICACIONES INFORMÁTICAS. Octubre 1997 (Publicado en el B.O.E. de 13 de Febrero de 1.996) SISTEMAS Y APLICACIONES INFORMÁTICAS 1. Representación y comunicación
Control de Robots Manipuladores
 NOMBRE DE LA ASIGNATURA: BENEMÉRITA UNIVERSIDAD AUTÓNOMA DE PUEBLA FACULTAD DE CIENCIAS DE LA ELECTRÓNICA PROGRAMA DE ESTUDIOS DE LA MAESTRÍA EN CIENCIAS DE LA ELECTRÓNICA CON OPCIÓN EN AUTOMATIZACIÓN
NOMBRE DE LA ASIGNATURA: BENEMÉRITA UNIVERSIDAD AUTÓNOMA DE PUEBLA FACULTAD DE CIENCIAS DE LA ELECTRÓNICA PROGRAMA DE ESTUDIOS DE LA MAESTRÍA EN CIENCIAS DE LA ELECTRÓNICA CON OPCIÓN EN AUTOMATIZACIÓN
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN
 TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Microcontroladores para instrumentación y control. 2.
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Microcontroladores para instrumentación y control. 2.
UC I. Rest. Ciclo Tipo UCR
 (01) - Primer Semestre Página 1 de 8 1004 CALCULO 10 6 No B OB 0 1006 SISTEMAS DE REPRESENTACION 10 4 No B OB 0 1035 METODOS Y TECNICAS DE INVESTIGACION 3 No B EL 0 1053 INGENIERIA DE SISTEMAS 4 No B OB
(01) - Primer Semestre Página 1 de 8 1004 CALCULO 10 6 No B OB 0 1006 SISTEMAS DE REPRESENTACION 10 4 No B OB 0 1035 METODOS Y TECNICAS DE INVESTIGACION 3 No B EL 0 1053 INGENIERIA DE SISTEMAS 4 No B OB
Montaje y Mantenimiento de Sistemas de Automatización Industrial
 Tfno: 956 074 222/655 617 059 Fax: 956 922 482 Montaje y Mantenimiento de Sistemas de Automatización Industrial Duración: 80 horas Modalidad: Online Coste Bonificable: 600 Objetivos del curso En el ámbito
Tfno: 956 074 222/655 617 059 Fax: 956 922 482 Montaje y Mantenimiento de Sistemas de Automatización Industrial Duración: 80 horas Modalidad: Online Coste Bonificable: 600 Objetivos del curso En el ámbito
ASIGNATURA: CONTROL Y PROGRAMACIÓN DE ROBOTS CÓDIGO: 2261
 ASIGNATURA: CONTROL Y PROGRAMACIÓN DE ROBOTS CÓDIGO: 221 DEPARTAMENTO: DEPARTAMENTO DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA ÁREAS DE CONOCIMIENTO: DEPARTAMENTO DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA DESCRIPTORES
ASIGNATURA: CONTROL Y PROGRAMACIÓN DE ROBOTS CÓDIGO: 221 DEPARTAMENTO: DEPARTAMENTO DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA ÁREAS DE CONOCIMIENTO: DEPARTAMENTO DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA DESCRIPTORES
RIVC - Robótica Industrial y Visión por Computador
 Unidad responsable: Unidad que imparte: Curso: Titulación: Créditos ECTS: 2016 295 - EEBE - Escuela de Ingeniería de Barcelona Este 707 - ESAII - Departamento de Ingeniería de Sistemas, Automática e Informática
Unidad responsable: Unidad que imparte: Curso: Titulación: Créditos ECTS: 2016 295 - EEBE - Escuela de Ingeniería de Barcelona Este 707 - ESAII - Departamento de Ingeniería de Sistemas, Automática e Informática
Especialidades en GII-TI
 Especialidades en GII-TI José Luis Ruiz Reina (coordinador) Escuela Técnica Superior de Ingeniería Informática Mayo 2014 Qué especialidades tiene la Ingeniería Informática? Según las asociaciones científicas
Especialidades en GII-TI José Luis Ruiz Reina (coordinador) Escuela Técnica Superior de Ingeniería Informática Mayo 2014 Qué especialidades tiene la Ingeniería Informática? Según las asociaciones científicas
Programa de Extensión Para Profesionales
 Programa de Extensión Para Profesionales Quienes somos Tecsup es una organización educativa privada de calidad internacional en Ingeniería Aplicada, que forma profesionales en disciplinas para las cuales
Programa de Extensión Para Profesionales Quienes somos Tecsup es una organización educativa privada de calidad internacional en Ingeniería Aplicada, que forma profesionales en disciplinas para las cuales
Autómatas programables
 Autómatas programables Autómatas programables INNOVACIÓN Y CUALIFICACIÓN, S.L. De la edición INNOVA 2004 INNOVACIÓN Y CUALIFICACIÓN, S.L ha puesto el máximo empeño en ofrecer una información completa y
Autómatas programables Autómatas programables INNOVACIÓN Y CUALIFICACIÓN, S.L. De la edición INNOVA 2004 INNOVACIÓN Y CUALIFICACIÓN, S.L ha puesto el máximo empeño en ofrecer una información completa y
Universidad de Costa Rica Sistema de Aplicaciones Estudiantiles SAE
 Página 1 de 8 Plan de Estudio Enfasis 0 Bloque Común(no hay énfasis) Nivel Curso Nombre del curso T P L TP Cred. Requisitos y Req. Equivalentes Correquisitos y Correq. Equivalentes 1 CI1010 INTRODUCCIÓN
Página 1 de 8 Plan de Estudio Enfasis 0 Bloque Común(no hay énfasis) Nivel Curso Nombre del curso T P L TP Cred. Requisitos y Req. Equivalentes Correquisitos y Correq. Equivalentes 1 CI1010 INTRODUCCIÓN
Robótica PLANIFICACIONES Actualización: 1ºC/2017. Planificaciones Robótica. Docente responsable: ANIGSTEIN MAURICIO.
 Planificaciones 8615 - Robótica Docente responsable: ANIGSTEIN MAURICIO 1 de 7 OBJETIVOS El Robot es un componente cada vez más frecuente en las líneas de producción industrial y en actividades de servicios.
Planificaciones 8615 - Robótica Docente responsable: ANIGSTEIN MAURICIO 1 de 7 OBJETIVOS El Robot es un componente cada vez más frecuente en las líneas de producción industrial y en actividades de servicios.
CURSOS DEL PLAN DE ESTUDIOS DE FÍSICA
 CURSOS DEL PLAN DE ESTUDIOS DE FÍSICA Nº CÓDIGO T CURSO Sistema 1 CF001 E TOPICOS ESPECIALES I D 4 3 --- --- 1 --- --- 2 CF002 E TOPICOS ESPECIALES II D 4 3 --- --- 1 --- --- 3 CF003 E TOPICOS ESPECIALES
CURSOS DEL PLAN DE ESTUDIOS DE FÍSICA Nº CÓDIGO T CURSO Sistema 1 CF001 E TOPICOS ESPECIALES I D 4 3 --- --- 1 --- --- 2 CF002 E TOPICOS ESPECIALES II D 4 3 --- --- 1 --- --- 3 CF003 E TOPICOS ESPECIALES
ASIGNATURA: INFORMATICA INDUSTRIAL. Cód.: Régimen: Cuatrimestral Horas semanales: 4 horas Escuela: Sistemas 2010
 1 ASIGNATURA: INFORMATICA INDUSTRIAL. Cód.: 33-408 Régimen: Cuatrimestral Horas semanales: 4 horas Escuela: Sistemas 2010 FUNDAMENTOS: Nuestro país experimenta la creciente necesidad de conformar redes
1 ASIGNATURA: INFORMATICA INDUSTRIAL. Cód.: 33-408 Régimen: Cuatrimestral Horas semanales: 4 horas Escuela: Sistemas 2010 FUNDAMENTOS: Nuestro país experimenta la creciente necesidad de conformar redes
INGENIERIA DE CONTROL II
 INGENIERIA DE CONTROL II COMPETENCIAS QUE ADQUIERE EL ESTUDIANTE Y RESULTADOS DEL APRENDIZAJE: El objetivo de este curso es que el estudiante conozca los conceptos básicos necesarios para realizar el control
INGENIERIA DE CONTROL II COMPETENCIAS QUE ADQUIERE EL ESTUDIANTE Y RESULTADOS DEL APRENDIZAJE: El objetivo de este curso es que el estudiante conozca los conceptos básicos necesarios para realizar el control
TABLA DE CONTENIDO DEL ÁREA DE MATEMÁTICAS:
 TABLA DE CONTENIDO DEL ÁREA DE MATEMÁTICAS: Las Siguientes tablas de contenido fueron determinadas a partir de la guía de evaluación de graduandos 2016 y currículum nacional base (CNB) de la carrera de
TABLA DE CONTENIDO DEL ÁREA DE MATEMÁTICAS: Las Siguientes tablas de contenido fueron determinadas a partir de la guía de evaluación de graduandos 2016 y currículum nacional base (CNB) de la carrera de
2015, Año del Generalísimo José María Morelos y Pavón
 Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
Nombre de la Asignatura: ROBOTICA Línea de Investigación o Trabajo: PROCESAMIENTO DE SEÑALES ELECTRICAS Y ELECTRONICAS Tiempo de dedicación del estudiante a las actividades de: DOC-TIS-TPS-CRÉDITOS 48
Presentación y objetivos
 Presentación y objetivos Cada vez más se van incorporando a la vivienda todo tipo de automatismos que aumentan el confort y la seguridad de sus instalaciones, así como el ahorro energético. Persianas eléctricas,
Presentación y objetivos Cada vez más se van incorporando a la vivienda todo tipo de automatismos que aumentan el confort y la seguridad de sus instalaciones, así como el ahorro energético. Persianas eléctricas,
Tema 2.- Caracterización de la informática La informática como disciplina científica Sub-áreas de la disciplina.
 Tema 2.- Caracterización de la informática 2.1. La informática como disciplina científica. 2.2. Sub-áreas de la disciplina. 2.1. La informática como disciplina científica. 2.1.1 Una definición de Informática.
Tema 2.- Caracterización de la informática 2.1. La informática como disciplina científica. 2.2. Sub-áreas de la disciplina. 2.1. La informática como disciplina científica. 2.1.1 Una definición de Informática.
FACULTAD DE CIENCIAS EXACTAS, INGENIERÍA Y AGRIMENSURA U.N.R.
 FACULTAD DE CIENCIAS EXACTAS, INGENIERÍA Y AGRIMENSURA U.N.R. Programa Analítico de la Asignatura: SISTEMAS LÓGICOS Código: E-3.23.2 Plan de Estudio: 1996 Carrera: INGENIERÍA ELECTRICISTA Departamento:
FACULTAD DE CIENCIAS EXACTAS, INGENIERÍA Y AGRIMENSURA U.N.R. Programa Analítico de la Asignatura: SISTEMAS LÓGICOS Código: E-3.23.2 Plan de Estudio: 1996 Carrera: INGENIERÍA ELECTRICISTA Departamento:
INGENIERÍA PROFESIONAL EN ROBÓTICA INDUSTRIAL EN COMPETENCIAS PROFESIONALES ASIGNATURA DE PERIFÉRICOS DE CONTROL
 INGENIERÍA PROFESIONAL EN ROBÓTICA INDUSTRIAL EN COMPETENCIAS PROFESIONALES ASIGNATURA DE PERIFÉRICOS DE CONTROL UNIDADES DE APRENDIZAJE 1. Competencias Automatizar procesos de producción mediante la implementación
INGENIERÍA PROFESIONAL EN ROBÓTICA INDUSTRIAL EN COMPETENCIAS PROFESIONALES ASIGNATURA DE PERIFÉRICOS DE CONTROL UNIDADES DE APRENDIZAJE 1. Competencias Automatizar procesos de producción mediante la implementación
[RECOMENDACIONES SOBRE LOS CONTENIDOS DE LAS COMPETENCIAS DE AUTOMÁTICA EN LOS GRADOS DE INGENIERÍA INDUSTRIAL]
![[RECOMENDACIONES SOBRE LOS CONTENIDOS DE LAS COMPETENCIAS DE AUTOMÁTICA EN LOS GRADOS DE INGENIERÍA INDUSTRIAL]](/thumbs/21/1227635.jpg "[RECOMENDACIONES SOBRE LOS CONTENIDOS DE LAS COMPETENCIAS DE AUTOMÁTICA EN LOS GRADOS DE INGENIERÍA INDUSTRIAL]") 2012 CEA ISA [RECOMENDACIONES SOBRE LOS CONTENIDOS DE LAS COMPETENCIAS DE AUTOMÁTICA EN LOS GRADOS DE INGENIERÍA INDUSTRIAL] En este documento se incluyen una serie de recomendaciones básicas para impartir
2012 CEA ISA [RECOMENDACIONES SOBRE LOS CONTENIDOS DE LAS COMPETENCIAS DE AUTOMÁTICA EN LOS GRADOS DE INGENIERÍA INDUSTRIAL] En este documento se incluyen una serie de recomendaciones básicas para impartir
Fecha de Elaboración Fecha de Revisión. Circuitos III HTD HTC HTA Asignatura. Básica de Ingeniería
 UNIVERSIDAD DISTRITAL Francisco José de Caldas Facultad de Ingeniería Ingeniería Eléctrica Elaboró Revisó Diana S. García M. con el Material de la Coordinación [Escriba aquí el nombre] Fecha de Elaboración
UNIVERSIDAD DISTRITAL Francisco José de Caldas Facultad de Ingeniería Ingeniería Eléctrica Elaboró Revisó Diana S. García M. con el Material de la Coordinación [Escriba aquí el nombre] Fecha de Elaboración
INGENIERO EN MECATRÓNICA. Este programa educativo se ofrece en las siguientes sedes académicas de la UABC:
 INGENIERO EN MECATRÓNICA Este programa educativo se ofrece en las siguientes sedes académicas de la UABC: Campus Campus Tijuana, Unidad Valle de las Palmas Campus Tijuana, Unidad Tecate Campus Mexicali,
INGENIERO EN MECATRÓNICA Este programa educativo se ofrece en las siguientes sedes académicas de la UABC: Campus Campus Tijuana, Unidad Valle de las Palmas Campus Tijuana, Unidad Tecate Campus Mexicali,
Experiencia docente en la impartición de un curso de modelado y control de sistemas continuos usando herramientas interactivas
 Grado en Ingeniería Electrónica Industrial Experiencia docente en la impartición de un curso de modelado y control de sistemas continuos usando herramientas interactivas 2 1. Asignatura Modelado y control
Grado en Ingeniería Electrónica Industrial Experiencia docente en la impartición de un curso de modelado y control de sistemas continuos usando herramientas interactivas 2 1. Asignatura Modelado y control
MICROCONTROLADORES: FUNDAMENTOS Y APLICACIONES CON PIC. Autores: Fernando E. Valdés Pérez Ramon Pallàs Areny. Título de la obra:
 Título de la obra: MICROCONTROLADORES: FUNDAMENTOS Y APLICACIONES CON PIC Autores: Fernando E. Valdés Pérez Ramon Pallàs Areny Composición y preimpresión: Carles Parcerisas Civit (3Q Editorial) Reservados
Título de la obra: MICROCONTROLADORES: FUNDAMENTOS Y APLICACIONES CON PIC Autores: Fernando E. Valdés Pérez Ramon Pallàs Areny Composición y preimpresión: Carles Parcerisas Civit (3Q Editorial) Reservados
[COMPETENCIAS DE AUTOMÁTICA]
![[COMPETENCIAS DE AUTOMÁTICA]](/thumbs/31/14785178.jpg "[COMPETENCIAS DE AUTOMÁTICA]") 2011 CEA - ISA [COMPETENCIAS DE AUTOMÁTICA] En este documento se incluyen una serie de recomendaciones básicas para impartir las asignaturas destinadas a adquirir las competencias propias de la Automática
2011 CEA - ISA [COMPETENCIAS DE AUTOMÁTICA] En este documento se incluyen una serie de recomendaciones básicas para impartir las asignaturas destinadas a adquirir las competencias propias de la Automática
Introducción a la Automatización Industrial
 a la Automatización Industrial UPCO ICAI Departamento de Eletrónica y Automática 1 Qué es automatizar? PLANTA Agitador Conseguir que la PLANTA funcione de forma automática Reactivo ácido Reactivo alcalino
a la Automatización Industrial UPCO ICAI Departamento de Eletrónica y Automática 1 Qué es automatizar? PLANTA Agitador Conseguir que la PLANTA funcione de forma automática Reactivo ácido Reactivo alcalino
4.1 CONGRUENCIA ENTRE LOS OBJETIVOS DEL PLAN DE ESTUDIOS Y EL PERFIL DE EGRESO CON LAS LGAC:
 4.1 CONGRUENCIA ENTRE LOS OBJETIVOS DEL PLAN DE ESTUDIOS Y EL PERFIL DE EGRESO CON LAS LGAC: A continuación se muestran los objetivos así como los mapas funcionales según la línea de acentuación y la línea
4.1 CONGRUENCIA ENTRE LOS OBJETIVOS DEL PLAN DE ESTUDIOS Y EL PERFIL DE EGRESO CON LAS LGAC: A continuación se muestran los objetivos así como los mapas funcionales según la línea de acentuación y la línea
ÍNDICE CAPÍTULO 1 FUNDAMENTOS DE LOS MICROCONTROLADORES
 ÍNDICE CAPÍTULO 1 FUNDAMENTOS DE LOS MICROCONTROLADORES 1.1 Introducción 1.2 Fundamentos de los procesadores digitales secuenciales 1.2.1 Introducción 1.2.2 Arquitectura interna 1.2.2.1 Procesadores digitales
ÍNDICE CAPÍTULO 1 FUNDAMENTOS DE LOS MICROCONTROLADORES 1.1 Introducción 1.2 Fundamentos de los procesadores digitales secuenciales 1.2.1 Introducción 1.2.2 Arquitectura interna 1.2.2.1 Procesadores digitales
Robótica aplicada con labview y lego
 Robótica aplicada con labview y lego Pedro Ponce Cruz Víctor M. de la Cueva Hernández Hiram Ponce Espinosa Selecciona la imagen para entrar Capítulo 1 Introducción a la robótica Continuar Introducción
Robótica aplicada con labview y lego Pedro Ponce Cruz Víctor M. de la Cueva Hernández Hiram Ponce Espinosa Selecciona la imagen para entrar Capítulo 1 Introducción a la robótica Continuar Introducción
INSTALACIÓN DOMÓTICA EN UNA VIVIENDA UNIFAMILIAR
 INSTALACIÓN DOMÓTICA EN UNA VIVIENDA UNIFAMILIAR Luis Pérez Mompeán Ingeniería Técnica Industrial (esp. Electrónica industrial) Universidad de Alcalá de Henares GENERALIDADES SOBRE DOMÓTICA Domótica Del
INSTALACIÓN DOMÓTICA EN UNA VIVIENDA UNIFAMILIAR Luis Pérez Mompeán Ingeniería Técnica Industrial (esp. Electrónica industrial) Universidad de Alcalá de Henares GENERALIDADES SOBRE DOMÓTICA Domótica Del
CFGS Automatización y Robótica Industrial. Módulos profesionales implicados en el proyecto y horas de cada módulo que estarán en dual (en la empresa):
:") CFGS Automatización y Robótica Industrial Los datos de este proyecto, son datos reales extraídos de un proyecto ya en marcha. No contiene toda la información del proyecto sino un extracto del mismo. Módulos
CFGS Automatización y Robótica Industrial Los datos de este proyecto, son datos reales extraídos de un proyecto ya en marcha. No contiene toda la información del proyecto sino un extracto del mismo. Módulos
PROGRAMA DE LA ASIGNATURA: Control y programación de robots. Código: Curso 2006/2007
 PROGRAMA DE LA ASIGNATURA: Control y programación de robots Código: 3042104010 Curso 2006/2007 CENTRO: ESCUELA TÉCNICA SUPERIOR DE INGENIEROS INDUSTRIALES TITULACIÓN: INGENIERÍA AUTOMÁTICA Y ELECTRÓNICA
PROGRAMA DE LA ASIGNATURA: Control y programación de robots Código: 3042104010 Curso 2006/2007 CENTRO: ESCUELA TÉCNICA SUPERIOR DE INGENIEROS INDUSTRIALES TITULACIÓN: INGENIERÍA AUTOMÁTICA Y ELECTRÓNICA
C/ Ordóñez, 21- CP/ LEGANÉS ( Madrid) Tel.: Fax.: AUTOMATISMOS Y AUTÓMATAS PROGRAMABLES OMRON
 Tel.: Fax.: AUTOMATISMOS Y AUTÓMATAS PROGRAMABLES OMRON") LA EMPRESA OMRON ELECTRONICS IBERIA S.A.U HA RECONOCIDO NUESTRA CAPACIDAD Y COMPETENCIA PARA IMPARTIR CURSOS DE FORMACIÓN DE SUS PRODUCTOS. ASIMISMO, NOS HAN RESALTADO LA LABOR DE FORMACIÓN QUE HEMOS REALIZADO
LA EMPRESA OMRON ELECTRONICS IBERIA S.A.U HA RECONOCIDO NUESTRA CAPACIDAD Y COMPETENCIA PARA IMPARTIR CURSOS DE FORMACIÓN DE SUS PRODUCTOS. ASIMISMO, NOS HAN RESALTADO LA LABOR DE FORMACIÓN QUE HEMOS REALIZADO
Dinámica del Robot. UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides
 UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La dinámica se ocupa de la relación entre las fuerzas que actúan sobre un cuerpo y el movimiento en el que se origina.
UCR ECCI CI-2657 Robótica Prof. M.Sc. Kryscia Daviana Ramírez Benavides Introducción La dinámica se ocupa de la relación entre las fuerzas que actúan sobre un cuerpo y el movimiento en el que se origina.
UNIDAD 1: INTRODUCCIÓN A LOS SISTEMAS AUTOMATIZADOS
 UNIVERSIDAD ALONSO DE OJEDA FACULTAD DE INGENIERÍA ESCUELA DE COMPUTACIÓN AUTOMATIZACIÓN UNIDAD 1: INTRODUCCIÓN A LOS SISTEMAS AUTOMATIZADOS AUTOR: ING. GERARDO ALBERTO LEAL, MSc Concepto de Automatización.
UNIVERSIDAD ALONSO DE OJEDA FACULTAD DE INGENIERÍA ESCUELA DE COMPUTACIÓN AUTOMATIZACIÓN UNIDAD 1: INTRODUCCIÓN A LOS SISTEMAS AUTOMATIZADOS AUTOR: ING. GERARDO ALBERTO LEAL, MSc Concepto de Automatización.
Está organizado en cinco temas, en el primer tema contiene los conceptos y generalidades de sensores, adquisición y monitoreo de datos.
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Clave de la asignatura: SATCA 1 : Carrera: Automatización Industrial APM-1304 2-4-6 Ingeniería Electrónica 2. PRESENTACIÓN Esta asignatura aporta al
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Clave de la asignatura: SATCA 1 : Carrera: Automatización Industrial APM-1304 2-4-6 Ingeniería Electrónica 2. PRESENTACIÓN Esta asignatura aporta al
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE LENGUAJE DE PROGRAMACIÓN
 TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE LENGUAJE DE PROGRAMACIÓN 1. Competencias Implementar sistemas de medición y control bajo los
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE LENGUAJE DE PROGRAMACIÓN 1. Competencias Implementar sistemas de medición y control bajo los
ESCUELA UNIVERSITARIA DE INFORMÁTICA DE SISTEMAS UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA. Apuntes de la asignatura de: 3(5,)e5,&26
e5,&26") ESCUELA UNIVERSITARIA DE INFORMÁTICA DE SISTEMAS UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA Apuntes de la asignatura de: 3(5,)e5,&26 Preparados por: Juan Carlos Lázaro Obensa Dpto. de Informática y
ESCUELA UNIVERSITARIA DE INFORMÁTICA DE SISTEMAS UNIVERSIDAD NACIONAL DE EDUCACIÓN A DISTANCIA Apuntes de la asignatura de: 3(5,)e5,&26 Preparados por: Juan Carlos Lázaro Obensa Dpto. de Informática y
AUTOMATIZACIÓN INDUSTRIAL
 Departamento de Ingenieria de Sistemas y Automática AUTOMATIZACIÓN INDUSTRIAL 1 AUTOMATIZACION INDUSTRIAL 2 AUTOMATIZACION INDUSTRIAL 3 AUTOMATAS PROGRAMABLES Surgen de la necesidad de controlar automáticamente
Departamento de Ingenieria de Sistemas y Automática AUTOMATIZACIÓN INDUSTRIAL 1 AUTOMATIZACION INDUSTRIAL 2 AUTOMATIZACION INDUSTRIAL 3 AUTOMATAS PROGRAMABLES Surgen de la necesidad de controlar automáticamente
IFCT0309 Montaje y Reparación de Equipos Microinformáticos
 IFCT0309 Montaje y Reparación de Equipos Microinformáticos 1. MÓDULO 1. MF0953_2 MONTAJE DE EQUIPOS MICROINFORMÁTICOS UNIDAD FORMATIVA 1. UF0861 MONTAJE Y VERIFICACIÓN DE COMPONENTES. UNIDAD DIDÁCTICA
IFCT0309 Montaje y Reparación de Equipos Microinformáticos 1. MÓDULO 1. MF0953_2 MONTAJE DE EQUIPOS MICROINFORMÁTICOS UNIDAD FORMATIVA 1. UF0861 MONTAJE Y VERIFICACIÓN DE COMPONENTES. UNIDAD DIDÁCTICA
Nombre del documento: Programa de Estudio de asignatura de Especialidad
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Programación Avanzada Carrera: Ingeniería Mecatrónica Clave de la asignatura: IMG - 1202 (Créditos) SATCA1 3-3 - 8 2.- PRESENTACIÓN Caracterización de
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Programación Avanzada Carrera: Ingeniería Mecatrónica Clave de la asignatura: IMG - 1202 (Créditos) SATCA1 3-3 - 8 2.- PRESENTACIÓN Caracterización de
SEGUNDO SEMESTRE: CÓDIGO ASIGNATURA REQUISITO T P L U 0250 ÁLGEBRA LINEAL Y GEOMETRÍA CALCULO II
 I-CICLO COMÚN:- BÁSICO [TOTAL CICLO COMÚN:141 U] PRIMER SEMESTRE: 0331 FISICA GENERAL I - 4 2-5 0251 CALCULO I - 3 3-5 0012 INTRODUCCIÓN A LA INGENIERÍA - 1 2-2 0183 LENGUA Y COMUNICACIÓN - 1 2-2 0551
I-CICLO COMÚN:- BÁSICO [TOTAL CICLO COMÚN:141 U] PRIMER SEMESTRE: 0331 FISICA GENERAL I - 4 2-5 0251 CALCULO I - 3 3-5 0012 INTRODUCCIÓN A LA INGENIERÍA - 1 2-2 0183 LENGUA Y COMUNICACIÓN - 1 2-2 0551
Carrera: MC. ABEL RODRÍGUEZ FRANCO
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: CONTROLADORES LÓGICOS PROGRAMABLES INGENIERÍA ELECTRÓNICA Carrera: Clave de la asignatura: Horas teoría - horas práctica créditos: 3 2 8 2.- HISTORIA
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: CONTROLADORES LÓGICOS PROGRAMABLES INGENIERÍA ELECTRÓNICA Carrera: Clave de la asignatura: Horas teoría - horas práctica créditos: 3 2 8 2.- HISTORIA
PROYECTO DOCENTE ASIGNATURA: "Robótica" Grupo: Grupo 1(971959) Titulacion: Grado en Ingeniería de las Tecnologías de Telecomunicación Curso:
 Titulacion: Grado en Ingeniería de las Tecnologías de Telecomunicación Curso:") PROYECTO DOCENTE ASIGNATURA: "Robótica" Grupo: Grupo 1(971959) Titulacion: Grado en Ingeniería de las Tecnologías de Telecomunicación Curso: 2015-2016 DATOS BÁSICOS DE LA ASIGNATURA/GRUPO Titulación: Año
PROYECTO DOCENTE ASIGNATURA: "Robótica" Grupo: Grupo 1(971959) Titulacion: Grado en Ingeniería de las Tecnologías de Telecomunicación Curso: 2015-2016 DATOS BÁSICOS DE LA ASIGNATURA/GRUPO Titulación: Año
INDICE Capitulo 1. Introducción a la informática Capitulo 2. La información y su representación
 INDICE Prólogo XIII Capitulo 1. Introducción a la informática 1 1.1. Definición y origen de término informática 1 1.2. Elementos y conceptos fundamentales 2 1.3. Esquema básicos de elementos físicos (hardware)
INDICE Prólogo XIII Capitulo 1. Introducción a la informática 1 1.1. Definición y origen de término informática 1 1.2. Elementos y conceptos fundamentales 2 1.3. Esquema básicos de elementos físicos (hardware)
LABORATORIO REMOTO DE AUTOMÁTICA: Trabajos realizados y planes de futuro
 LABORATORIO REMOTO DE AUTOMÁTICA: Trabajos realizados y planes de futuro Ramon Costa, Luis Basañez Institut d'organització i Control de Sistemes Industrials (IOC) Escola Tècnica Superior d'enginyeria Industrial
LABORATORIO REMOTO DE AUTOMÁTICA: Trabajos realizados y planes de futuro Ramon Costa, Luis Basañez Institut d'organització i Control de Sistemes Industrials (IOC) Escola Tècnica Superior d'enginyeria Industrial
Capítulo 1: Introducción
 Capítulo 1: Introducción 1 Capítulo 1: Introducción 2 Capítulo 1: Introducción Capítulo 1: Introducción 3 1.1. Antecedentes históricos. Robots de estructura paralela. En este proyecto vamos a realizar
Capítulo 1: Introducción 1 Capítulo 1: Introducción 2 Capítulo 1: Introducción Capítulo 1: Introducción 3 1.1. Antecedentes históricos. Robots de estructura paralela. En este proyecto vamos a realizar
GRADUADO/A EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES
 GRADUADO/A EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES Las enseñanzas conducentes a la obtención del Título de Graduado/a en Ingeniería en Tecnologías Industriales por la Universidad de Málaga sustituyen
GRADUADO/A EN INGENIERÍA EN TECNOLOGÍAS INDUSTRIALES Las enseñanzas conducentes a la obtención del Título de Graduado/a en Ingeniería en Tecnologías Industriales por la Universidad de Málaga sustituyen
ANX-PR/CL/ GUÍA DE APRENDIZAJE. ASIGNATURA Robotica. CURSO ACADÉMICO - SEMESTRE Primer semestre
 ANX-PR/CL/001-02 GUÍA DE APRENDIZAJE ASIGNATURA Robotica CURSO ACADÉMICO - SEMESTRE 2015-16 - Primer semestre GA_05TI_55000105_1S_2015-16 Datos Descriptivos Nombre de la Asignatura Titulación Centro responsable
ANX-PR/CL/001-02 GUÍA DE APRENDIZAJE ASIGNATURA Robotica CURSO ACADÉMICO - SEMESTRE 2015-16 - Primer semestre GA_05TI_55000105_1S_2015-16 Datos Descriptivos Nombre de la Asignatura Titulación Centro responsable
Universidad Ricardo Palma
 1. DATOS ADMINISTRATIVOS Universidad Ricardo Palma FACULTAD DE INGENIERÍA ESCUELA ACADÉMICO PROFESIONAL DE INGENIERÍA ELECTRONICA DEPARTAMENTO ACADÉMICO DE INGENIERÍA SÍLABO 1.1 Nombre del curso : CONTROL
1. DATOS ADMINISTRATIVOS Universidad Ricardo Palma FACULTAD DE INGENIERÍA ESCUELA ACADÉMICO PROFESIONAL DE INGENIERÍA ELECTRONICA DEPARTAMENTO ACADÉMICO DE INGENIERÍA SÍLABO 1.1 Nombre del curso : CONTROL
CSC 2. SÍNTESIS Y REDACCIÓN FINAL DE LOS CRITERIOS DE EVALUACIÓN (CRITERIOS ORIGINALES Nº)(ESTÁNDARES Nº) 3. CCLAVE
(ESTÁNDARES Nº) 3. CCLAVE") Sociedad de la información. Introducción histórica de la informática. Impacto de las Tecnologías de la Información y Comunicación (TIC) en los diversos ámbitos de la sociedad actual. Avances y riesgos.
Sociedad de la información. Introducción histórica de la informática. Impacto de las Tecnologías de la Información y Comunicación (TIC) en los diversos ámbitos de la sociedad actual. Avances y riesgos.
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
INSTALACIONES AUTOMATIZADAS EN VIVIENDAS Y EDIFICIOS
 GUÍA DIDÁCTICA BOE 21 de febrero de 1.996 MÓDULO 3 INSTALACIONES AUTOMATIZADAS EN VIVIENDAS Y EDIFICIOS EQUIPOS E INSTALACIONES ELECTROTÉCNICAS AUTORES: José Moreno Gil Elías Rodríguez Diéguez David Lasso
GUÍA DIDÁCTICA BOE 21 de febrero de 1.996 MÓDULO 3 INSTALACIONES AUTOMATIZADAS EN VIVIENDAS Y EDIFICIOS EQUIPOS E INSTALACIONES ELECTROTÉCNICAS AUTORES: José Moreno Gil Elías Rodríguez Diéguez David Lasso
Métodos Numéricos. Carrera: BQM Participantes. Representantes de las academias de Ingeniería Bioquímica. Academia de Ingeniería
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Métodos Numéricos Ingeniería Bioquímica BQM - 0524 3-2-8 2.- HISTORIA DEL PROGRAMA
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Métodos Numéricos Ingeniería Bioquímica BQM - 0524 3-2-8 2.- HISTORIA DEL PROGRAMA
IV. PROGRAMACIÓN TEMÁTICA PRIMERA UNIDAD: MICROPROCESADORES COMPETENCIA ESPECÍFICA:
 I. DATOS GENERALES II. SUMILLA SILABO 1. Nombre de la Asignatura : MICROPROCESADORES 2. Carácter : Electivo 3. Carrera Profesional : Ing. Electrónica y Telecomunicaciones 4. Código : IE0808 5. Semestre
I. DATOS GENERALES II. SUMILLA SILABO 1. Nombre de la Asignatura : MICROPROCESADORES 2. Carácter : Electivo 3. Carrera Profesional : Ing. Electrónica y Telecomunicaciones 4. Código : IE0808 5. Semestre
ESTRUCTURA DE COMPUTADORES GUÍA DOCENTE
 ESTRUCTURA DE COMPUTADORES GUÍA DOCENTE OBJETIVOS Y COMPETENCIAS Con la y los ejercicios del documento relativo a esta asignatura se pretenden adquirir las competencias básicas relacionadas con la informática,
ESTRUCTURA DE COMPUTADORES GUÍA DOCENTE OBJETIVOS Y COMPETENCIAS Con la y los ejercicios del documento relativo a esta asignatura se pretenden adquirir las competencias básicas relacionadas con la informática,
UNIVERSIDAD EMILIANO ZAPATA
 UNIVERSIDAD EMILIANO ZAPATA OBJETIVO DE LA MATERIA Aprender a diseñar y programar microcontroladores PIC para su aplicación en sistemas automatizados. INGENIERIA EN MECATRONICA MATERIA Mecatrónica III
UNIVERSIDAD EMILIANO ZAPATA OBJETIVO DE LA MATERIA Aprender a diseñar y programar microcontroladores PIC para su aplicación en sistemas automatizados. INGENIERIA EN MECATRONICA MATERIA Mecatrónica III
PROGRAMA ANALÍTICO. Area: Educación Digital y Profesional Curso: 1 E y S Ciclo lectivo: 2016
 Contenidos clasificados en Unidades: Unidad Nº 1 La Producción de lo Artesanal a la Industrial. Procesos sobre insumos materiales: operaciones, flujos y productos. Los procesos como secuencias de operaciones
Contenidos clasificados en Unidades: Unidad Nº 1 La Producción de lo Artesanal a la Industrial. Procesos sobre insumos materiales: operaciones, flujos y productos. Los procesos como secuencias de operaciones
UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA ESCUELA ACADÉMICO PROFESIONAL DE INGENIERÍA ELECTRÓNICA SÍLABO PLAN DE ESTUDIOS
 UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA ESCUELA ACADÉMICO PROFESIONAL DE INGENIERÍA ELECTRÓNICA SÍLABO PLAN DE ESTUDIOS 2006-2 I. DATOS ADMINISTRATIVOS. Nombre : INGENIERÍA DE CONTROL Código :
UNIVERSIDAD RICARDO PALMA FACULTAD DE INGENIERÍA ESCUELA ACADÉMICO PROFESIONAL DE INGENIERÍA ELECTRÓNICA SÍLABO PLAN DE ESTUDIOS 2006-2 I. DATOS ADMINISTRATIVOS. Nombre : INGENIERÍA DE CONTROL Código :
Planificaciones Control Indust. Distribuido. Docente responsable: FERREIRA AICARDI LYDIA FABIANA. 1 de 5
 Planificaciones 6629 - Control Indust. Distribuido Docente responsable: FERREIRA AICARDI LYDIA FABIANA 1 de 5 OBJETIVOS Desarrollar las jerarquias conceptuales correspondientes a la automatización industrial
Planificaciones 6629 - Control Indust. Distribuido Docente responsable: FERREIRA AICARDI LYDIA FABIANA 1 de 5 OBJETIVOS Desarrollar las jerarquias conceptuales correspondientes a la automatización industrial
IFCT0209 Sistemas Microinformáticos
 IFCT0209 Sistemas Microinformáticos 1. MÓDULO 1. MF0219_2 INSTALACIÓN Y CONFIGURACIÓN DE SISTEMAS OPERATIVOS UNIDAD FORMATIVA 1. UF0852 INSTALACIÓN Y ACTUALIZACIÓN DE SISTEMAS OPERATIVOS UNIDAD DIDÁCTICA
IFCT0209 Sistemas Microinformáticos 1. MÓDULO 1. MF0219_2 INSTALACIÓN Y CONFIGURACIÓN DE SISTEMAS OPERATIVOS UNIDAD FORMATIVA 1. UF0852 INSTALACIÓN Y ACTUALIZACIÓN DE SISTEMAS OPERATIVOS UNIDAD DIDÁCTICA
Table of Contents. Table of Contents Tecnología de automatización IPA Industrial process automation IPA Virtual
 Table of Contents Table of Contents Tecnología de automatización IPA Industrial process automation IPA Virtual 1 2 2 2 Lucas Nülle GmbH Página 1/8 www.lucas-nuelle.es Tecnología de automatización Adquirir
Table of Contents Table of Contents Tecnología de automatización IPA Industrial process automation IPA Virtual 1 2 2 2 Lucas Nülle GmbH Página 1/8 www.lucas-nuelle.es Tecnología de automatización Adquirir
UNIVERSIDAD PEDAGÓGICA Y TECNOLÓGICA DE COLOMBIA FACULTAD DE CIENCIAS PROGRAMA DE MATEMÁTICAS PLAN DE ESTUDIOS
 UNIVERSIDAD PEDAGÓGICA Y TECNOLÓGICA DE COLOMBIA FACULTAD DE CIENCIAS PROGRAMA DE MATEMÁTICAS PLAN DE ESTUDIOS ASIGNATURA : ELECTIVA I - PROGRAMACION CÓDIGO : 8104661 SEMESTRE : IV CRÉDITOS : 4 FECHA DE
UNIVERSIDAD PEDAGÓGICA Y TECNOLÓGICA DE COLOMBIA FACULTAD DE CIENCIAS PROGRAMA DE MATEMÁTICAS PLAN DE ESTUDIOS ASIGNATURA : ELECTIVA I - PROGRAMACION CÓDIGO : 8104661 SEMESTRE : IV CRÉDITOS : 4 FECHA DE
Jornada Sage/Python. 15 de Julio Experiencia docente en "Control y programación de robots" utilizando Sage
 Experiencia docente en "Control y programación de robots" utilizando Sage Jornada Sage/Python 15 de Julio 2010 Profesor: Carlos Elvira Izurategui Área de Ingeniería de Sistemas y Automática Universidad
Experiencia docente en "Control y programación de robots" utilizando Sage Jornada Sage/Python 15 de Julio 2010 Profesor: Carlos Elvira Izurategui Área de Ingeniería de Sistemas y Automática Universidad
Automatización y Control Industrial
 Automatización y Control Industrial Con reconocimiento de Validez Oficial de Estudios conforme al acuerdo No. 20123077 con fecha de 10 de Diciembre de 2012. A qué se dedica un Licenciado en Automatización
Automatización y Control Industrial Con reconocimiento de Validez Oficial de Estudios conforme al acuerdo No. 20123077 con fecha de 10 de Diciembre de 2012. A qué se dedica un Licenciado en Automatización
Sistema de Control Página 1 de 6. Código:
 Sistema de Control Página 1 de 6 Programa de: Sistemas de Control UNIVERSIDAD NACIONAL DE CÓRDOBA Facultad de Ciencias Exactas, Físicas y Naturales República Argentina Carrera: Ingeniería Mecánica Escuela:
Sistema de Control Página 1 de 6 Programa de: Sistemas de Control UNIVERSIDAD NACIONAL DE CÓRDOBA Facultad de Ciencias Exactas, Físicas y Naturales República Argentina Carrera: Ingeniería Mecánica Escuela:
Carrera: ECC
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Microprocesadores y Microcontroladores Ingeniería Electrónica ECC-0428 4-2-10 2.-
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Microprocesadores y Microcontroladores Ingeniería Electrónica ECC-0428 4-2-10 2.-
11 REPRESENTACIÓN EN EL ESPACIO DE ESTADO. 1.3 SOLUCIÓN DE ECUACIONES DE ESTADO EN TIEMPO
 Control Avanzado. Luis Edo García Jaimes 1 TABLA DE CONTENIDO 1. ANÁLISIS DE SISTEMAS DE CONTROL EN EL ESPACIO DE 5 ESTADO 1.1 FORMAS CANÓNICAS PARA ECUACIONES EN EL ESPACIO DE ESTADO EN TIEMPO DISCRETO
Control Avanzado. Luis Edo García Jaimes 1 TABLA DE CONTENIDO 1. ANÁLISIS DE SISTEMAS DE CONTROL EN EL ESPACIO DE 5 ESTADO 1.1 FORMAS CANÓNICAS PARA ECUACIONES EN EL ESPACIO DE ESTADO EN TIEMPO DISCRETO
Sistemas Electrónicos Especialidad del Grado de Ingeniería de Tecnologías de Telecomunicación
 Especialidad del Grado de Ingeniería de Tecnologías de Telecomunicación Charlas Informativas sobre las Especialidades de los Grados E.T.S.I.I.T. Jesús Banqueri Ozáez Departamento de Electrónica y Tecnología
Especialidad del Grado de Ingeniería de Tecnologías de Telecomunicación Charlas Informativas sobre las Especialidades de los Grados E.T.S.I.I.T. Jesús Banqueri Ozáez Departamento de Electrónica y Tecnología
IIM Aportación al perfil. Esta asignatura proporciona al alumno las competencias necesarias para:
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: SATCA 1 Instrumentación Avanzada Ingeniería Electrónica IIM-1305 2-4-6 2.- PRESENTACIÓN Caracterización de la asignatura.
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: SATCA 1 Instrumentación Avanzada Ingeniería Electrónica IIM-1305 2-4-6 2.- PRESENTACIÓN Caracterización de la asignatura.
1 Software de una computadora 2 Sistemas operativos 3 Manejo avanzado y programación en ms-dos 4 Lenguajes de programación
 1 Software de una computadora 1.1 Software de control o sistema de explotación 1.2 Software de tratamiento 1.3 Software de diagnóstico y mantenimiento 1.4 Actividades: software de una computadora 2 Sistemas
1 Software de una computadora 1.1 Software de control o sistema de explotación 1.2 Software de tratamiento 1.3 Software de diagnóstico y mantenimiento 1.4 Actividades: software de una computadora 2 Sistemas
IFCD0111 Programación en Lenguajes Estructurados de Aplicaciones de Gestión
 IFCD0111 Programación en Lenguajes Estructurados de Aplicaciones de Gestión 1. MÓDULO 1. MF0223_3 SISTEMAS OPERATIVOS Y APLICACIONES INFORMÁTICAS UNIDAD FORMATIVA 1. UF1465 COMPUTADORES PARA BASES DE DATOS
IFCD0111 Programación en Lenguajes Estructurados de Aplicaciones de Gestión 1. MÓDULO 1. MF0223_3 SISTEMAS OPERATIVOS Y APLICACIONES INFORMÁTICAS UNIDAD FORMATIVA 1. UF1465 COMPUTADORES PARA BASES DE DATOS