Microcontroladores y DSPs
|
|
|
- Miguel Ángel Blázquez Pérez
- hace 10 años
- Vistas:
Transcripción
1 Microcontroladores y DSPs Introducción a los Controladores Digitales de señales dspic30f M.C. Ricardo Álvarez Glez. FCE BUAP

2 dspic30f Controladores digitales de señales de 16 bits Ofrecen la capacidad de un DSP con las características de control en tiempo real de un microcontrolador. Interrupciones priorizadas Perifericos extensivos incluidos

3 dspic30f Controladores digitales de señales de 16 bits Características para manejo de potencia Todo esto combinado con una máquina DSP Acumuladores duales de 40 bits. MACS de 16 x 16 de un solo ciclo Barrel Shifter de 40 bits Búsquedas duales de operandos

4 dspics Familia de controladores digitales de señales de 16 bits Ofrecen la flexibilidad y control de un microcontrolador, con las caracteristicas de cómputo y la eficiencia de un DSP. La familia de controladores digitales de señales de 16 bits dspic30f, es la mas reciente y avanzada familia de procesadores de Microchip.

5 Arquitectura Harvard Modificada
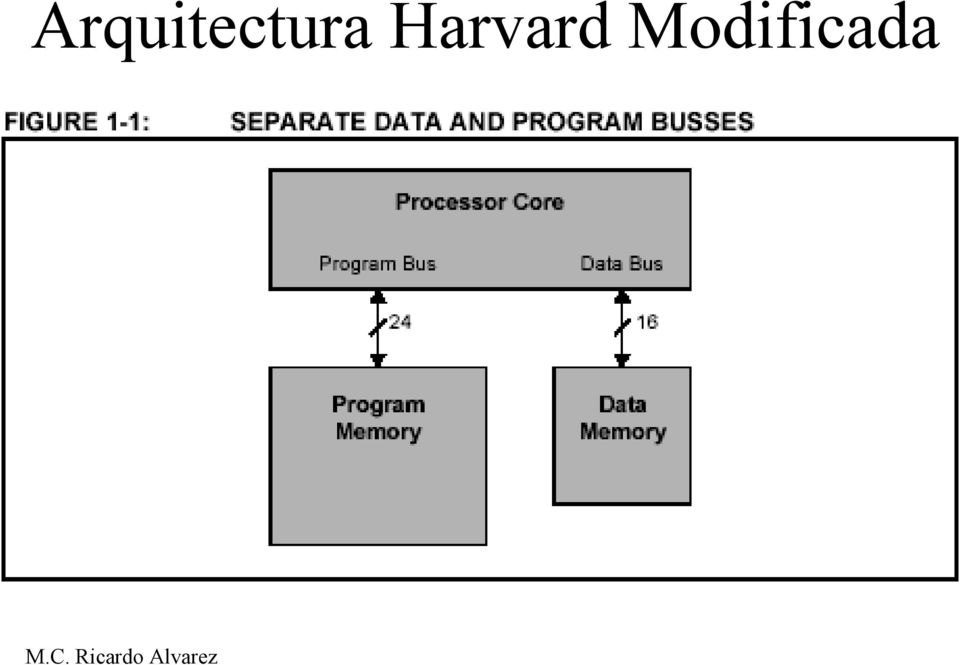
6 Arquitectura Harvard Permite palabras de diferente tamaño: Programa 24 bits Datos 16 bits Mejora la eficiencia del conjunto de instrucciones Permite procesamiento mas rápido, el procesador puede buscar anticipadamente la próxima instrucción, mientras ejecuta la instrucción actual que accesa datos en la RAM.

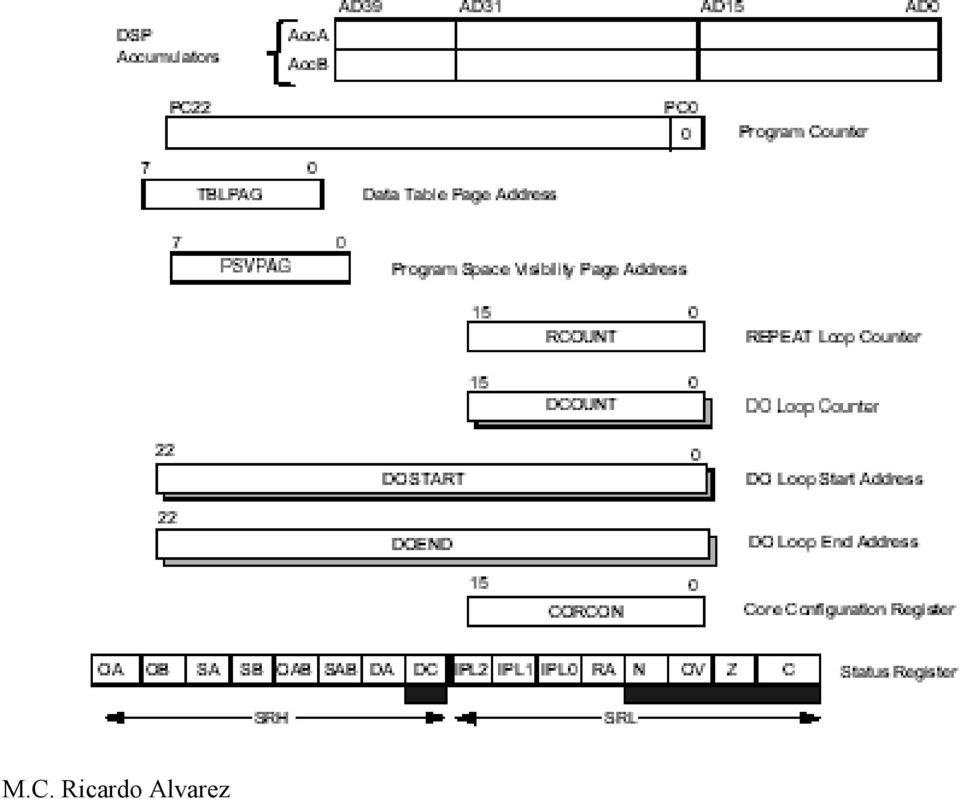
7
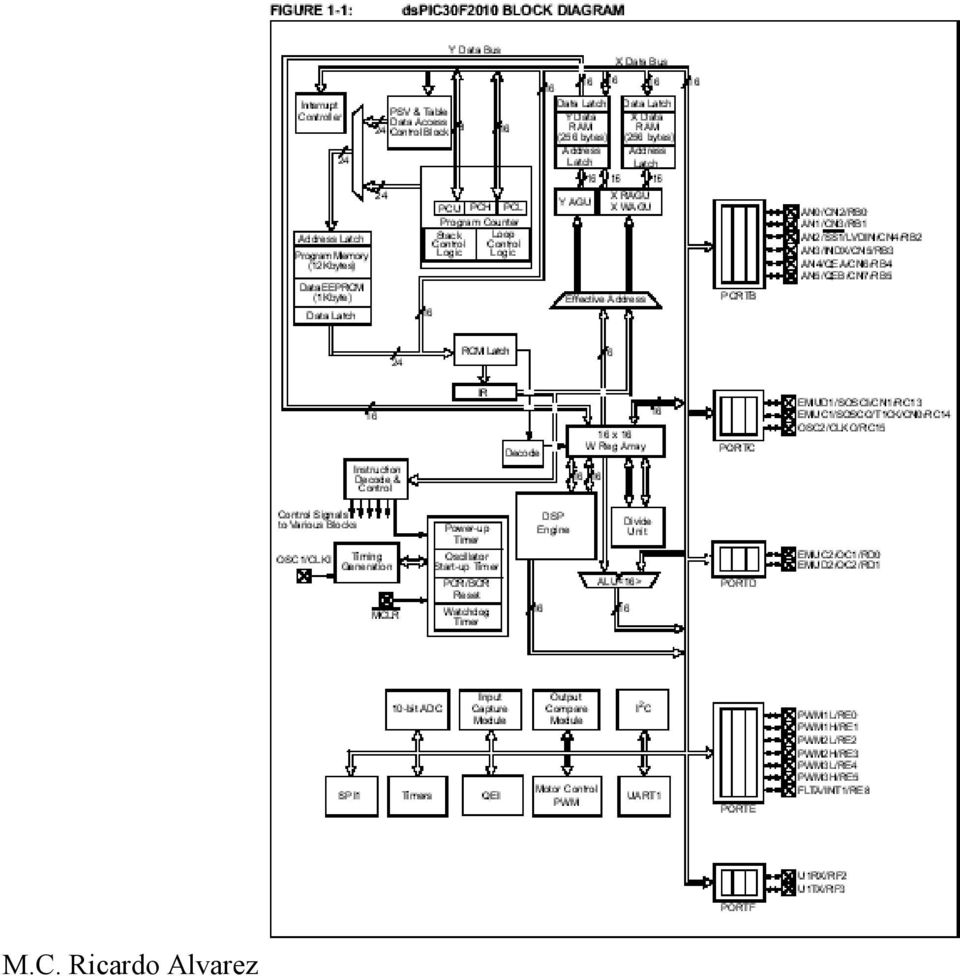
8 Memoria de programa PC de 24 bits, para direccionar hasta 4M x 24 palabras El espacio de memoria de programa contiene: Localidad de reset Tablas de vectores de interrupción Memoria de programa de usuario EEPROM de datos Memoria de configuración.

9 Facilidad de instrucciones para realizar ciclos. Se pueden realizar ciclos con las instrucciones do y repeat, ambas pueden interrumpirse en cualquier momento. Estas características hacen los algoritmos repetitivos DSP muy eficientes, mientras mantienen la habilidad de manejar eventos de tiempo real

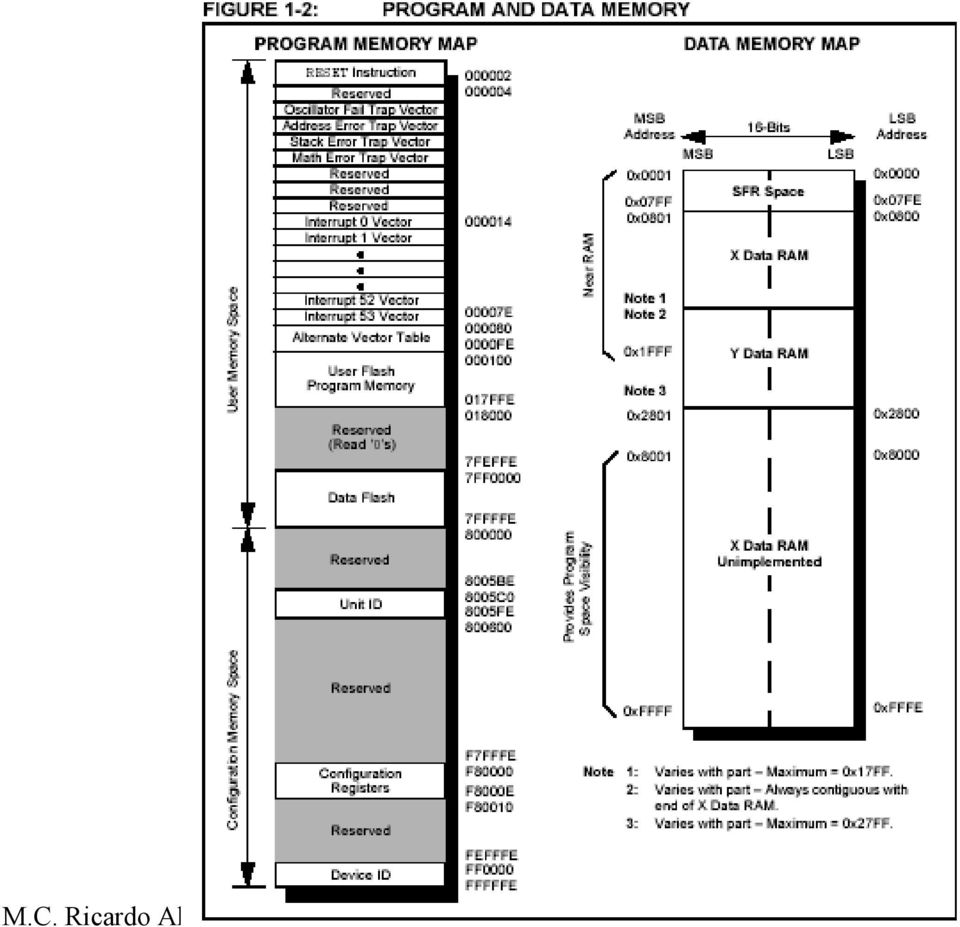
10 Memoria de datos Espacio de datos de 64Kbytes, y es tratado como un espacio lineal de datos para muchas instrucciones. Las instrucciones de multiplicación de DSP dividen la memoria en dos bloques X, Y. Estas instrucciones DSP soportan lecturas duales de operandos. Cuando no se usan las instrucciones de DSP, la memoria es tratada como un solo bloque de memoria X

11 Memoria de datos Primeros 2KB SFRs Después de los SFR hasta 8 KB RAM de datos, se puede dividir en los bloques X, Y para instrucciones DSP Los primeros 8 KB de datos (2k SFR+ 6k RAM), son conocidos como RAM cercana, accesible
, son conocidos como RAM cercana,")
12
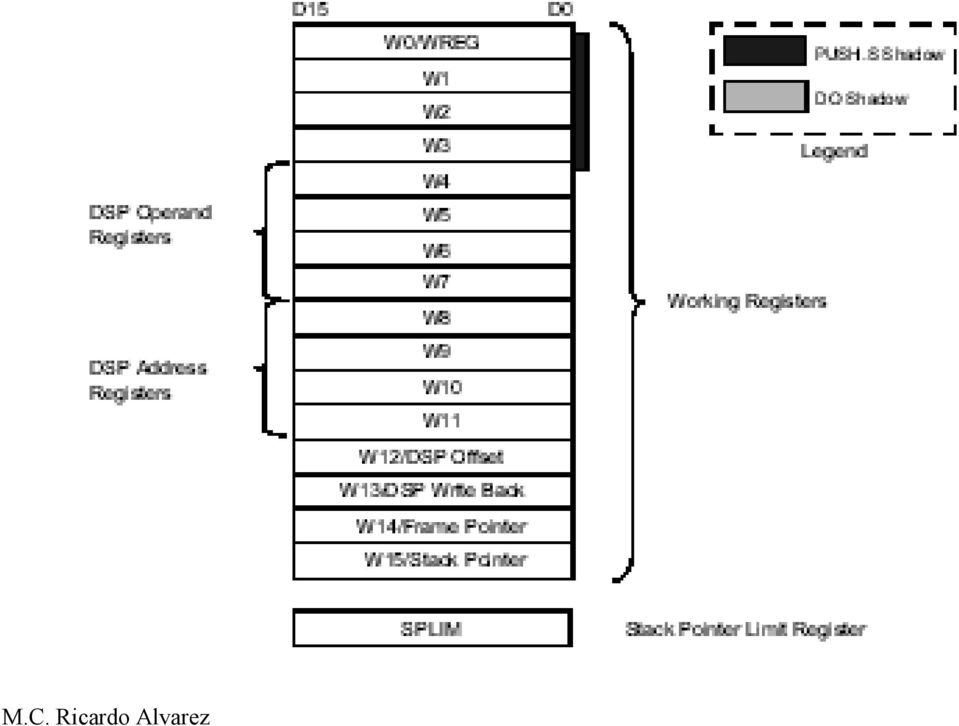
13 Arreglo de registros de trabajo 16 registros de trabajo de 16 bits cada uno W0...W15 W15 apuntador del stack de software (unicamente) Los registros de trabajo restantes pueden funcionar como: Registros de datos Apuntador de direcciones de datos Registro de offset de dirección

14 Modos de direccionamiento Inherente (sin operandos) Relativo Literal Memoria directa Registro directo Registro indirecto Los seis modos de direccionamiento son soportados por cada instrucción. Los registros de trabajo son usados ampliamente como apuntadores para los modos de direccionamiento indirecto

15
16
17 Visibilidad de espacio de programa Los 32 KB superiores del mapa de memoria de datos pueden mapearse opcionalmente en memoria de programa, usando el registro de 8 bits de visibilidad de página en memoria de programa (PSVPAG)

18
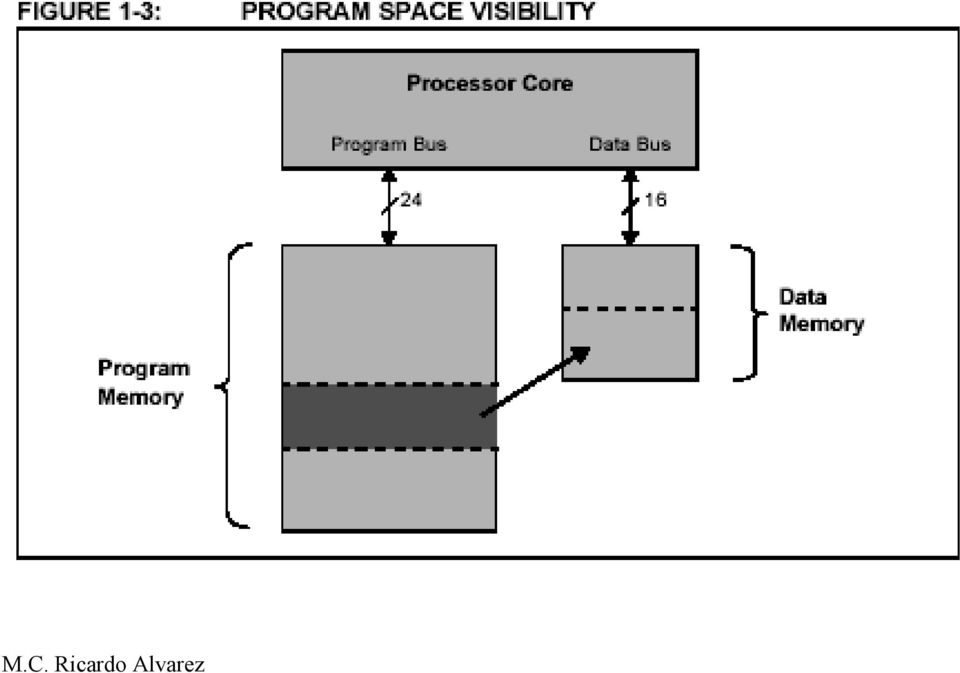
19 El mapeo de memoria de programa, como si fuera memoria de datos, permite que cualquier instrucción tenga acceso a la memoria de programa como si fuera memoria de datos. Esta característica es usada para tablas de búsqueda, especialmente para tablas de coeficientes de filtros, para algoritmos DSP.

20 dspic30f Conjunto de Instrucciones. Instrucciones MCU Instrucciones DSP Estas dos clases de instrucciones están integradas independientemente en la arquitectura y desarrolladas en una sencilla unidad de ejecución.

21 dspic30f Conjunto de Instrucciones. Casi todas las instrucciones se ejecutan en un solo ciclo. Instrucciones de dos ciclos: Instrucciones que cambian el flujo del programa (bra, call, etc). Movimiento doble de palabras (mov D) Instrucciones de lectura/escritura de memoria de programa
22 dspic30f Conjunto de Instrucciones. Para muchas instrucciones, el dspic30f, es capaz de ejecutar: Lectura de memoria de datos Lectura de registro de trabajo Escritura a memoria de datos Lectura de memoria de programa (instrucción). Todo esto durante un solo ciclo de máquina! Operaciones del tipo A+B=C en un solo ciclo
23 Divide Support
24 Máquina DSP Multiplicador de punto fijo de 17 x17 bits de alta velocidad. ALU de 40 bits. Dos acumuladores saturados de 40 bits Corredor de barril bidireccional de 40 bits (capaz de recorrer hasta 15 bits a la derecha o 16 bits a la izquierda en un solo ciclo)
25
26
27 Interrupciones El dspic30f tiene un sistema priorizado de interrupciones. Cada fuente de interrupción tiene su propio vector, y se le puede asignar dinámicamente uno de siete niveles de prioridad. La tabla de vectores de interrupciones (IVT) reside en la parte baja de la memoria de programa.
28
29 Periféricos
30 Variantes del dispositivo Los dspics se dividen en tres categorías principales: Propósito general Control de motores/conversión de energía Sensores
31 Familia de propósito general pines ideal para una variedad de aplicaciones empotradas de 16 bits
32 Motor Control and Power Conversion Family pines, ideales para soportar aplicaciones de control de motores, UPS, inversores, fuentes de alimentación conmutadas y equipo relacionado. 10-bit, 500-ksps A/D Converter. Motor Control PWM. Quadrature Encoder. Timers, Input Capture, Output Compare. UART, SPI, I2C, CAN Serial Interfaces
33
34
35 Sensor Family pines, ideal para soportar aplicaciones incrustadas de bajo costo.. 12-bit, 100-ksps A/D Converter. Timers, Input Capture, Output Compare. UART, SPI, I2C Serial Interfaces
36 Herramientas de desarrollo El proceso de desarrollo se puede dividir en tres partes principalmente: a. Escribir el código b. Corregir el código c. Programar el dispositivo
37 Es una herramienta de depuración efectiva en costo, que permite que se pueda probar el código en la tarjeta de circuito.
38 MPLAB ICE 4000 In-Circuit Emulator, es una herramienta de depuración completa, capaz de emular todos los miembros de la familia 30F a velocidad completa.
39
40 Herramientas de programación. MPLAB PM3, puede programar todos los tipos de encapsulado y tiene mas memoria que el ICD2, ideal para programar en producción. MPLAB ICD2, además de ser un programador, es un depurador, ideal para probar y depurar código.
41
42 MPLAB PM3 Universal Device Programmer Puede controlarse desde el MPLAB IDE, desde una linea de comandos, o puede funcionar solo.. Built-in support for In-Circuit Serial Programming.. Serialized programming for unique ID numbers.. Safe mode for code security.. High-speed programming and download through USB.. Secure digital and multimedia card slot for convenient program storage.
43 MPLAB ASM30 Assembler Interpreta instrucciones y directivas en archivos de código fuente, para generar código objeto. Se usa un ligador para convertir el código objeto en un archivo final de salida (.hex) para programar un dispositivo. Las directivas son interpretadas en tiempo de construcción, por el ensamblador, y se usan para definir secciones de memoria, inicializar constantes, declarar y definir símbolos, etc. Un punto. Debe preceder cada directiva.
44 Formato general para instrucciones y directivas: [label:] instruction[operands] [; comment] [label:] directive[arguments] [; comment]
45 Directivas comunmente usadas:.equ equates a value to a symbol.include includes another file into the current file.global makes a symbol globally visible.text starts a section of executable code.end ends assembly within a file.section starts a section (of code or data, in program or data memory)
46 Directivas comunmente usadas:.space allocates space within a section.bss adds variables to the uninitialized data section.data adds variables to the initialized data section.hword declares words of data within a section.palign aligns code within a section.align aligns data within a section
47 MPLAB LINK30 LINKER OVERVIEW
48 Función del ligador Esencialmente liga todos los archivos ensamblados y compilados en el proyecto, para formar un solo archivo ejecutable que pueda programarse en un dispositivo, simularse o emularse. El archivo hex y el archivo mapa se genera a partir del archivo coff
49 Ejemplo 1 /*Programa de ejemplo para realizar el encendido/apagado de dos leds conectados a RD0 y RD1. Autor: Ricardo Alvarez */.title "parpadeo de led".equ 30F2010,1.include "p30f2010.inc".text.equ cont,0x0810.global reset
50 reset:goto main.org 100 main: mov # SP_init,W15 ;inicializa el SP mov # SPLIM_init,W0 mov W0,SPLIM nop bclr TRISD,#00 ;RD0 salida bclr TRISD,#01 ;RD1 salida nop
51 bset PORTD,#00 bclr PORTD,#01 loop: btg PORTD,#00 call rtdo btg PORTD,#01 call rtdo bra loop ;************************************************
52 rtdo: mov #0xFFFF,W0 mov W0,cont resta: dec cont bra NZ,resta return.end
NINO PICKIT2 PIC PROGRAMMER
 NINO PICKIT2 PIC PROGRAMMER El programador PicKit2, es una herramienta de programación para desarrollo de bajo costo. Es capaz de programar la mayoría de los microcontroladores y memorias seriales EEPROM
NINO PICKIT2 PIC PROGRAMMER El programador PicKit2, es una herramienta de programación para desarrollo de bajo costo. Es capaz de programar la mayoría de los microcontroladores y memorias seriales EEPROM
Winide y Kit EVALQTY CDM 2011
 Winide y Kit EVALQTY CDM 2011 Seteo de jumpers jumpers JUMPER : JP1 Selección de la Tensión de Alimentación al MCU. JP1 en posición 1-2 VDD = 5Vdc JP1 en posición 2-3 VDD = 3Vdc (MCU alimentado con 3Vdc)
Winide y Kit EVALQTY CDM 2011 Seteo de jumpers jumpers JUMPER : JP1 Selección de la Tensión de Alimentación al MCU. JP1 en posición 1-2 VDD = 5Vdc JP1 en posición 2-3 VDD = 3Vdc (MCU alimentado con 3Vdc)
Instrumentación con Microcontroladores. Ing. Rodrigo Alejandro Gutiérrez Arenas 22/03/12 al 29/03/12
 Instrumentación con Microcontroladores Ing. Rodrigo Alejandro Gutiérrez Arenas 22/03/12 al 29/03/12 Contenido Problemas relativos a los proyectos Introducción y motivación para utilizar a Arduino Entrada
Instrumentación con Microcontroladores Ing. Rodrigo Alejandro Gutiérrez Arenas 22/03/12 al 29/03/12 Contenido Problemas relativos a los proyectos Introducción y motivación para utilizar a Arduino Entrada
Introducción a Arduino
 9 de Noviembre de 2012 Indice-I Plataforma Estándar Electrónica IDE Conceptos básicos electrónica Ley de Ohm y efecto Joule Ruido, puntos sin conexión y efecto rebote Semiconductores Conceptos básicos
9 de Noviembre de 2012 Indice-I Plataforma Estándar Electrónica IDE Conceptos básicos electrónica Ley de Ohm y efecto Joule Ruido, puntos sin conexión y efecto rebote Semiconductores Conceptos básicos
Manual de usuario. PICnano v1. Programador/depurador de PIC s
 Manual de usuario 1 Programador/depurador de PIC s Manual de usuario Contenido: 1.-Descripción general.. 3 1.1-Identificando las partes de 3 1.2-Conociendo la Interfaz (Software).. 4 2.-Formas de Programación.
Manual de usuario 1 Programador/depurador de PIC s Manual de usuario Contenido: 1.-Descripción general.. 3 1.1-Identificando las partes de 3 1.2-Conociendo la Interfaz (Software).. 4 2.-Formas de Programación.
Microcontroladores PIC de Microchip: generalidades
 Microcontroladores PIC de Microchip: generalidades PIC significa Peripheral Interface Controller Los fabrica ARIZONA MICROCHIP TECHNOLOGY. Fábrica principal: Chandler (Arizona). Otras en Tender (Arizona),
Microcontroladores PIC de Microchip: generalidades PIC significa Peripheral Interface Controller Los fabrica ARIZONA MICROCHIP TECHNOLOGY. Fábrica principal: Chandler (Arizona). Otras en Tender (Arizona),
I2C. Ing. Pablo Martín Gomez [email protected]
 I2C Ing. Pablo Martín Gomez [email protected] 1 Comunicaciones en un bus serie 2 Comunicaciones en un bus serie 3 I²C Velocidad 4 UART Universal Asynchronous Receiver Transmitter Estándar de comunicación
I2C Ing. Pablo Martín Gomez [email protected] 1 Comunicaciones en un bus serie 2 Comunicaciones en un bus serie 3 I²C Velocidad 4 UART Universal Asynchronous Receiver Transmitter Estándar de comunicación
DESCRIPCION DEL SITEMA MASTER.
 DESCRIPCION DEL SITEMA MASTER. ESTRUCTURA. El sistema MASTER (Sistema Modular para Control Adaptativo en Tiempo Real) se ha implementado en base a un computador compatible PC-AT, dotado de una tarjeta
DESCRIPCION DEL SITEMA MASTER. ESTRUCTURA. El sistema MASTER (Sistema Modular para Control Adaptativo en Tiempo Real) se ha implementado en base a un computador compatible PC-AT, dotado de una tarjeta
Técnicas Digitales III
 Universidad Tecnológica Nacional Facultad Regional San Nicolás Técnicas Digitales III Familia 56800 DSP56F801 1 DSP56F801 Nombre funcional Nº Pines Power (V DD ) 5 Ground (V SS ) 6 Supply Cap. 2 PLL y
Universidad Tecnológica Nacional Facultad Regional San Nicolás Técnicas Digitales III Familia 56800 DSP56F801 1 DSP56F801 Nombre funcional Nº Pines Power (V DD ) 5 Ground (V SS ) 6 Supply Cap. 2 PLL y
GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA EB88 BOOTLOADER: TINY INDICE
 1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA EB88 BOOTLOADER: TINY INDICE 1. Información general sobre el programa Bootloader para el sistema EB88. Auto-programador (Self programming) a través del puerto
1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA EB88 BOOTLOADER: TINY INDICE 1. Información general sobre el programa Bootloader para el sistema EB88. Auto-programador (Self programming) a través del puerto
Laboratorio de Sistemas Embebidos Conceptos generales (2009)
") Laboratorio de Sistemas Embebidos Conceptos generales (2009) Índice Introducción a los PIC Conceptos generales sobre el dspic30f Reloj del sistema Entrada/salida con puertos paralelos Timers Interrupciones
Laboratorio de Sistemas Embebidos Conceptos generales (2009) Índice Introducción a los PIC Conceptos generales sobre el dspic30f Reloj del sistema Entrada/salida con puertos paralelos Timers Interrupciones
Guía resumida para utilizar el microcontrolador CY7C68013
 Guía resumida para utilizar el microcontrolador CY7C68013 Camilo Quintáns Graña Miguel Ángel Domínguez Gómez Vigo, 2011 Índice 1. DESCRIPCIÓN DEL HARDWARE... 3 1.1. Introducción... 3 1.2. Recursos de memoria...
Guía resumida para utilizar el microcontrolador CY7C68013 Camilo Quintáns Graña Miguel Ángel Domínguez Gómez Vigo, 2011 Índice 1. DESCRIPCIÓN DEL HARDWARE... 3 1.1. Introducción... 3 1.2. Recursos de memoria...
Tipos de Dispositivos Controladores
 Tipos de Dispositivos Controladores PLC Allen Bradley Siemens Schneider OMRON PC & Software LabView Matlab Visual.NET (C++, C#) FPGAS Xilinx Altera Híbridos Procesador + FPGA (altas prestaciones) µcontrolador
Tipos de Dispositivos Controladores PLC Allen Bradley Siemens Schneider OMRON PC & Software LabView Matlab Visual.NET (C++, C#) FPGAS Xilinx Altera Híbridos Procesador + FPGA (altas prestaciones) µcontrolador
picojava TM Características
 picojava TM Introducción El principal objetivo de Sun al introducir Java era poder intercambiar programas ejecutables Java entre computadoras de Internet y ejecutarlos sin modificación. Para poder transportar
picojava TM Introducción El principal objetivo de Sun al introducir Java era poder intercambiar programas ejecutables Java entre computadoras de Internet y ejecutarlos sin modificación. Para poder transportar
Memoria La memoria es la parte del ordenador en la que se guardan o almacenan los programas (las instrucciones y los datos).
.") Memoria La memoria es la parte del ordenador en la que se guardan o almacenan los programas (las instrucciones y los datos). Memoria Típica. Los datos almacenados en memoria tienen que pasar, en un momento
Memoria La memoria es la parte del ordenador en la que se guardan o almacenan los programas (las instrucciones y los datos). Memoria Típica. Los datos almacenados en memoria tienen que pasar, en un momento
GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA PICCITO 16F88 INDICE
 1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA PICCITO 16F88 INDICE 1. Información general sobre el programa Bootloader para el sistema PICCITO 16F88. Auto-programador (Self programming) a través del
1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA PICCITO 16F88 INDICE 1. Información general sobre el programa Bootloader para el sistema PICCITO 16F88. Auto-programador (Self programming) a través del
Matemática de redes Representación binaria de datos Bits y bytes
 Matemática de redes Representación binaria de datos Los computadores manipulan y almacenan los datos usando interruptores electrónicos que están ENCENDIDOS o APAGADOS. Los computadores sólo pueden entender
Matemática de redes Representación binaria de datos Los computadores manipulan y almacenan los datos usando interruptores electrónicos que están ENCENDIDOS o APAGADOS. Los computadores sólo pueden entender
UNIDADES DE ALMACENAMIENTO DE DATOS
 1.2 MATÉMATICAS DE REDES 1.2.1 REPRESENTACIÓN BINARIA DE DATOS Los computadores manipulan y almacenan los datos usando interruptores electrónicos que están ENCENDIDOS o APAGADOS. Los computadores sólo
1.2 MATÉMATICAS DE REDES 1.2.1 REPRESENTACIÓN BINARIA DE DATOS Los computadores manipulan y almacenan los datos usando interruptores electrónicos que están ENCENDIDOS o APAGADOS. Los computadores sólo
Arquitecturas DSP. Phil Lapsley, Jeff Bier, Amit Shoham, Edward A. Lee DSP Processor Fundamentals. Architectures and Features IEEE Press 1997
 Arquitecturas DSP Phil Lapsley, Jeff Bier, Amit Shoham, Edward A. Lee DSP Processor Fundamentals. Architectures and Features IEEE Press 1997 Arquitecturas DSP Sistemas de procesamiento de señales Transductor
Arquitecturas DSP Phil Lapsley, Jeff Bier, Amit Shoham, Edward A. Lee DSP Processor Fundamentals. Architectures and Features IEEE Press 1997 Arquitecturas DSP Sistemas de procesamiento de señales Transductor
ZILOG DEVELOPER STUDIO
 ZILOG DEVELOPER STUDIO El Z8PLUS puede ser programado por medio de un sistema de desarrollo que consta de un programa para compilarlo y una tarjeta de emulación, esta parte es una breve introducción al
ZILOG DEVELOPER STUDIO El Z8PLUS puede ser programado por medio de un sistema de desarrollo que consta de un programa para compilarlo y una tarjeta de emulación, esta parte es una breve introducción al
OBJETIVOS DE LA MATERIA... 4 PROGRAMA ANALÍTICO. CONTENIDOS TEÓRICOS Y PRÁCTICOS... 5 BIBLIOGRAFIA... 7
 UNIVERSIDAD NACIONAL DE LA MATANZA DEPARTAMENTO DE INGENIERIA E INVESTIGACIONES TECNOLOGICAS INGENIERIA EN INFORMATICA ARQUITECTURA DE COMPUTADORAS (1109) Profesor Titular: Ing. Fernando I. Szklanny PLANIFICACIÓN
UNIVERSIDAD NACIONAL DE LA MATANZA DEPARTAMENTO DE INGENIERIA E INVESTIGACIONES TECNOLOGICAS INGENIERIA EN INFORMATICA ARQUITECTURA DE COMPUTADORAS (1109) Profesor Titular: Ing. Fernando I. Szklanny PLANIFICACIÓN
Herramientas hardware y software para el desarrollo de aplicaciones con Microcontroladores PIC bajo plataformas GNU/Linux
 Herramientas hardware y software para el desarrollo de aplicaciones con Microcontroladores PIC bajo plataformas GNU/Linux Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid
Herramientas hardware y software para el desarrollo de aplicaciones con Microcontroladores PIC bajo plataformas GNU/Linux Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid
2 Sea una unidad de disco duro de brazo móvil con las siguientes características:
 1 Sea una unidad de disco duro de brazo móvil con las siguientes características: 18 superficies, 20.331 cilindros y 400 sectores por pista. Sectores de 1.024 bytes de información neta. Velocidad de rotación:
1 Sea una unidad de disco duro de brazo móvil con las siguientes características: 18 superficies, 20.331 cilindros y 400 sectores por pista. Sectores de 1.024 bytes de información neta. Velocidad de rotación:
INSTITUTO TECNOLÓGICO SUPERIOR DE PÁNUCO APUNTES DE LA MATERIA DE: MICROPROCESADORES Y MICROCONTROLADORES I
 INSTITUTO TECNOLÓGICO SUPERIOR DE PÁNUCO APUNTES DE LA MATERIA DE: MICROPROCESADORES Y MICROCONTROLADORES I DEPARTAMENTO DE INGENIERÍA ELECTRÓNICA ING. FORTINO VÁZQUEZ ELORZA Documento traducido de la
INSTITUTO TECNOLÓGICO SUPERIOR DE PÁNUCO APUNTES DE LA MATERIA DE: MICROPROCESADORES Y MICROCONTROLADORES I DEPARTAMENTO DE INGENIERÍA ELECTRÓNICA ING. FORTINO VÁZQUEZ ELORZA Documento traducido de la
UPV-EHU. EUITI e ITT Vitoria-Gasteiz. Ampliación de Sistemas Digitales. Depuración de programas
 DEPARTAMENTO DE ELECTRONICA Y TELECOMUNICACIONES ESCUELA UNIVERSITARIA DE INGENIERIA TECNICA INDUSTRIAL E INGENIERIA TECNICA EN TOPOGRAFIA VITORIA-GASTEIZ UNIVERSIDAD DEL PAIS VASCO - EUSKAL HERRIKO UNIBERTSITATEA
DEPARTAMENTO DE ELECTRONICA Y TELECOMUNICACIONES ESCUELA UNIVERSITARIA DE INGENIERIA TECNICA INDUSTRIAL E INGENIERIA TECNICA EN TOPOGRAFIA VITORIA-GASTEIZ UNIVERSIDAD DEL PAIS VASCO - EUSKAL HERRIKO UNIBERTSITATEA
Unidad I. 1.1 Sistemas numéricos (Binario, Octal, Decimal, Hexadecimal)
") Unidad I Sistemas numéricos 1.1 Sistemas numéricos (Binario, Octal, Decimal, Hexadecimal) Los computadores manipulan y almacenan los datos usando interruptores electrónicos que están ENCENDIDOS o APAGADOS.
Unidad I Sistemas numéricos 1.1 Sistemas numéricos (Binario, Octal, Decimal, Hexadecimal) Los computadores manipulan y almacenan los datos usando interruptores electrónicos que están ENCENDIDOS o APAGADOS.
Qué es un Microcontrolador?
 Curso de Microcontroladores Qué es un Microcontrolador? Al igual que la mayoría de las computadoras, los microcontroladores son simples ejecutores de instrucciones de propósito general. La verdadera estrella
Curso de Microcontroladores Qué es un Microcontrolador? Al igual que la mayoría de las computadoras, los microcontroladores son simples ejecutores de instrucciones de propósito general. La verdadera estrella
Clase 20: Arquitectura Von Neuman
 http://computacion.cs.cinvestav.mx/~efranco @efranco_escom [email protected] Estructuras de datos (Prof. Edgardo A. Franco) 1 Contenido Arquitectura de una computadora Elementos básicos de una
http://computacion.cs.cinvestav.mx/~efranco @efranco_escom [email protected] Estructuras de datos (Prof. Edgardo A. Franco) 1 Contenido Arquitectura de una computadora Elementos básicos de una
Familias de microcontroladores de 16 bits de Microchip
 Familias de microcontroladores de 16 bits de Microchip Características generales Periféricos, software y herramientas de desarrollo comunes a las 4 familias. Optimizados para C. Memoria de programa desde
Familias de microcontroladores de 16 bits de Microchip Características generales Periféricos, software y herramientas de desarrollo comunes a las 4 familias. Optimizados para C. Memoria de programa desde
NANO GRABADOR OCULTO EXTENDED TS9680
 www.tacticalsecurity.net E-mail: [email protected] NANO GRABADOR OCULTO EXTENDED TS9680 C CONTENIDO Página 1 El dispositivo... 2-3 2 Características técnicas... 4-5-6 3 Trabajando con el dispositivo...
www.tacticalsecurity.net E-mail: [email protected] NANO GRABADOR OCULTO EXTENDED TS9680 C CONTENIDO Página 1 El dispositivo... 2-3 2 Características técnicas... 4-5-6 3 Trabajando con el dispositivo...
Arquitectura de Computadores
 Arquitectura de Computadores [email protected] Curso 2004-2005 Arquitectura de Computadores Arquitectura de computadores es la disciplina que estudia la organización y funcionamiento de los computadores
Arquitectura de Computadores [email protected] Curso 2004-2005 Arquitectura de Computadores Arquitectura de computadores es la disciplina que estudia la organización y funcionamiento de los computadores
Diseño e implementación de Filtros Digitales. Mg. Ing. Luis Romero Dr. Ing. Vicente Mut Dr. Ing. Carlos Soria Año 2011
 Diseño e implementación de Filtros Digitales Mg. Ing. Luis Romero Dr. Ing. Vicente Mut Dr. Ing. Carlos Soria Año 2011 Introducción Un buen diseño de un filtro digital y su eficiente implementación en hardware
Diseño e implementación de Filtros Digitales Mg. Ing. Luis Romero Dr. Ing. Vicente Mut Dr. Ing. Carlos Soria Año 2011 Introducción Un buen diseño de un filtro digital y su eficiente implementación en hardware
Dispositivos de almacenamien to secundario. Almacenamiento de datos
 Dispositivos de almacenamien to secundario Almacenamiento de datos Índice Medios de almacenamiento magnético. Medios de almacenamiento óptico. Medios de almacenamiento de estado sólido. Categorías de los
Dispositivos de almacenamien to secundario Almacenamiento de datos Índice Medios de almacenamiento magnético. Medios de almacenamiento óptico. Medios de almacenamiento de estado sólido. Categorías de los
Diseño de Sistemas embebidos y comunicaciones: Aplicaciones de telefonía, RF y localización remota. Ing. José Oliden Martínez
 Diseño de Sistemas embebidos y comunicaciones: Aplicaciones de telefonía, RF y localización remota El controlador dentro de un sistema de Control DISPOSITIVO DE MEDICIÓN CONVERSOR ANÁLOGO DIGITAL CONTROLADOR
Diseño de Sistemas embebidos y comunicaciones: Aplicaciones de telefonía, RF y localización remota El controlador dentro de un sistema de Control DISPOSITIVO DE MEDICIÓN CONVERSOR ANÁLOGO DIGITAL CONTROLADOR
TEMPORIZADORES, CONTADORES Y COMPARADORES
 Practica 2 TEMPORIZADORES, CONTADORES Y COMPARADORES Objetivos Al completar esta práctica el alumno: Será capaz de configurar y utilizar el PLC, realizar en el software del PLC control aplicando ladder
Practica 2 TEMPORIZADORES, CONTADORES Y COMPARADORES Objetivos Al completar esta práctica el alumno: Será capaz de configurar y utilizar el PLC, realizar en el software del PLC control aplicando ladder
Tema 1 Introducción. Arquitectura básica y Sistemas Operativos. Fundamentos de Informática
 Tema 1 Introducción. Arquitectura básica y Sistemas Operativos Fundamentos de Informática Índice Descripción de un ordenador Concepto básico de Sistema Operativo Codificación de la información 2 1 Descripción
Tema 1 Introducción. Arquitectura básica y Sistemas Operativos Fundamentos de Informática Índice Descripción de un ordenador Concepto básico de Sistema Operativo Codificación de la información 2 1 Descripción
En este capítulo se describe la forma de cómo se implementó el sistema de video
 En este capítulo se describe la forma de cómo se implementó el sistema de video por medio de una cámara web y un servomecanismo que permitiera al usuario ver un experimento en el mismo instante en que
En este capítulo se describe la forma de cómo se implementó el sistema de video por medio de una cámara web y un servomecanismo que permitiera al usuario ver un experimento en el mismo instante en que
Introducción a la Computación
 Introducción a la Computación MCC Marco Antonio Crúz Chávez 2003 Sistema de información Es un sistema incluido en otro sistema mayor que recibe, almacena, procesa y distribuye información. Los principales
Introducción a la Computación MCC Marco Antonio Crúz Chávez 2003 Sistema de información Es un sistema incluido en otro sistema mayor que recibe, almacena, procesa y distribuye información. Los principales
En el presente capítulo se describe la programación del instrumento virtual y cómo
 Capítulo 6. Instrumentación virtual En el presente capítulo se describe la programación del instrumento virtual y cómo éste controla el circuito de captura de señales, la llamada telefónica y escribe los
Capítulo 6. Instrumentación virtual En el presente capítulo se describe la programación del instrumento virtual y cómo éste controla el circuito de captura de señales, la llamada telefónica y escribe los
TEMA 2: Representación de la Información en las computadoras
 TEMA 2: Representación de la Información en las computadoras Introducción Una computadora es una máquina que procesa información y ejecuta programas. Para que la computadora ejecute un programa, es necesario
TEMA 2: Representación de la Información en las computadoras Introducción Una computadora es una máquina que procesa información y ejecuta programas. Para que la computadora ejecute un programa, es necesario
Programador de PIC s y Memorias EEPROM
 Programador de PIC s y Memorias EEPROM Technical Revision Federico Lugo Revision A1 2013 FETRONICS 2 Descripción MicroProg es un herramienta de Grabacion, Borrado Verificacion y Depuracion programas (.hex)
Programador de PIC s y Memorias EEPROM Technical Revision Federico Lugo Revision A1 2013 FETRONICS 2 Descripción MicroProg es un herramienta de Grabacion, Borrado Verificacion y Depuracion programas (.hex)
6-REGISTROS DEL 8086 Y DEL 80286
 ESTRUCTURA DE COMPUTADORES I (Capítulo 6: Los registros del microprocesador 8086) 1/7 6-REGISTROS DEL 8086 Y DEL 80286 6.1 INTRODUCCIÓN: Dentro del procesador existen unos contenedores especiales de 16
ESTRUCTURA DE COMPUTADORES I (Capítulo 6: Los registros del microprocesador 8086) 1/7 6-REGISTROS DEL 8086 Y DEL 80286 6.1 INTRODUCCIÓN: Dentro del procesador existen unos contenedores especiales de 16
ARREGLOS DEFINICION GENERAL DE ARREGLO
 ARREGLOS DEFINICION GENERAL DE ARREGLO Conjunto de cantidades o valores homogéneos, que por su naturaleza se comportan de idéntica forma y deben de ser tratados en forma similar. Se les debe de dar un
ARREGLOS DEFINICION GENERAL DE ARREGLO Conjunto de cantidades o valores homogéneos, que por su naturaleza se comportan de idéntica forma y deben de ser tratados en forma similar. Se les debe de dar un
FLASH-POD. Características. Aplicaciones. Descripción general. Emulador en Tiempo Real FLASH-POD. FLASH-POD
 Características. Emulador en Tiempo Real. In Circuit Debugger para la familia HC908. Puerto Serial USB y RS-232C para conexión a la PC. Función diagnóstico para verificar condiciones modo monitor en la
Características. Emulador en Tiempo Real. In Circuit Debugger para la familia HC908. Puerto Serial USB y RS-232C para conexión a la PC. Función diagnóstico para verificar condiciones modo monitor en la
 UNIDAD 2 Configuración y operación de un sistema de cómputo Representación de datos Conceptos El concepto de bit (abreviatura de binary digit) es fundamental para el almacenamiento de datos Puede representarse
UNIDAD 2 Configuración y operación de un sistema de cómputo Representación de datos Conceptos El concepto de bit (abreviatura de binary digit) es fundamental para el almacenamiento de datos Puede representarse
Anexo B. Comunicaciones entre mc y PC
 Anexo B Comunicaciones entre mc y PC En este apartado se hará hincapié en los comandos para el manejo del módulo de comunicaciones desde el PC. Conociendo estos comando se podrá realizar una aplicación
Anexo B Comunicaciones entre mc y PC En este apartado se hará hincapié en los comandos para el manejo del módulo de comunicaciones desde el PC. Conociendo estos comando se podrá realizar una aplicación
Universidad Central de Bayamón Colegio de Desarrollo Empresarial y Tecnología
 Universidad Central de Bayamón Colegio de Desarrollo Empresarial y Tecnología Número de Estudiante: Fecha: Nombre: Examen Parcial #1 Prof. Carlos Rodríguez Sánchez REDES 235 Parte I- Selección Múltiple.
Universidad Central de Bayamón Colegio de Desarrollo Empresarial y Tecnología Número de Estudiante: Fecha: Nombre: Examen Parcial #1 Prof. Carlos Rodríguez Sánchez REDES 235 Parte I- Selección Múltiple.
Programación y diseño de dispositivos mediante microcontroladores PIC
 Metodología de Programación, Programación en C, Aplicaciones electrónicas 1 / 7 Programación y diseño de dispositivos mediante microcontroladores PIC Hemos elegido el microcontrolador PIC16F84 por las
Metodología de Programación, Programación en C, Aplicaciones electrónicas 1 / 7 Programación y diseño de dispositivos mediante microcontroladores PIC Hemos elegido el microcontrolador PIC16F84 por las
Sistemas de Computadoras Índice
 Sistemas de Computadoras Índice Concepto de Computadora Estructura de la Computadora Funcionamiento de la Computadora Historia de las Computadoras Montando una Computadora Computadora Un sistema de cómputo
Sistemas de Computadoras Índice Concepto de Computadora Estructura de la Computadora Funcionamiento de la Computadora Historia de las Computadoras Montando una Computadora Computadora Un sistema de cómputo
Curso sobre Microcontroladores Familia HC9S08 de Freescale
 Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: [email protected] Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: [email protected] Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
PROBLEMAS DE FUNDAMENTOS DE TECNOLOGÍA DE COMPUTADORES T5. MEMORIAS
 PROBLEMAS DE FUNDAMENTOS DE TECNOLOGÍA DE COMPUTADORES T5. MEMORIAS Tema 5 Memorias Hoja: 2 / 14 Base teórica La memoria es el lugar en el que se almacenan las instrucciones y los datos para que se puedan
PROBLEMAS DE FUNDAMENTOS DE TECNOLOGÍA DE COMPUTADORES T5. MEMORIAS Tema 5 Memorias Hoja: 2 / 14 Base teórica La memoria es el lugar en el que se almacenan las instrucciones y los datos para que se puedan
Curso S08 para Cavernícolas
 Curso S08 para Cavernícolas Tema ORIGENES DE LOS MICROCONTROLADORES FREESCALE, 2014 Todos los derechos reservados INTRODUCION Desde sus inicios como Motorola, esta empresa ha sido reconocida mundialmente
Curso S08 para Cavernícolas Tema ORIGENES DE LOS MICROCONTROLADORES FREESCALE, 2014 Todos los derechos reservados INTRODUCION Desde sus inicios como Motorola, esta empresa ha sido reconocida mundialmente
Una computadora de cualquier forma que se vea tiene dos tipos de componentes: El Hardware y el Software.
 ARQUITECTURA DE LAS COMPUTADORAS QUE ES UNA COMPUTADORA (UN ORDENADOR)? Existen numerosas definiciones de una computadora, entre ellas las siguientes: 1) Una computadora es un dispositivo capaz de realizar
ARQUITECTURA DE LAS COMPUTADORAS QUE ES UNA COMPUTADORA (UN ORDENADOR)? Existen numerosas definiciones de una computadora, entre ellas las siguientes: 1) Una computadora es un dispositivo capaz de realizar
DISEÑO DE UN PLC DOMÉSTICO UTILIZANDO UN MICROCONTROLADOR PIC-18F4550
 DISEÑO DE UN PLC DOMÉSTICO UTILIZANDO UN MICROCONTROLADOR PIC-18F4550 QUIRINO JIMENEZ DOMINGUEZ, MARGARITA ALVAREZ CERVERA INSTITUTO TECNOLÓGICO DE MÉRIDA [email protected] RESUMEN: En el presente
DISEÑO DE UN PLC DOMÉSTICO UTILIZANDO UN MICROCONTROLADOR PIC-18F4550 QUIRINO JIMENEZ DOMINGUEZ, MARGARITA ALVAREZ CERVERA INSTITUTO TECNOLÓGICO DE MÉRIDA [email protected] RESUMEN: En el presente
TARJETA CONVERSORA ANALOGA/DIGITAL (A/D)
") TARJETA CONVERSORA ANALOGA/DIGITAL (A/D) 1. INTRODUCCIÓN. Un conversor A/D es un dispositivo que mapea una tensión análoga en un código o palabra digital de n bits. Para esto toma muestras de la señal
TARJETA CONVERSORA ANALOGA/DIGITAL (A/D) 1. INTRODUCCIÓN. Un conversor A/D es un dispositivo que mapea una tensión análoga en un código o palabra digital de n bits. Para esto toma muestras de la señal
GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA EVOLUPIC Bootloader 16F88 BOOTLOADER: AN1310 DE MICROCHIP INDICE
 1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA EVOLUPIC Bootloader 16F88 BOOTLOADER: AN1310 DE MICROCHIP INDICE 1. Información general sobre el programa Bootloader para el sistema EVOLUPIC-16F88. Auto-programador
1 GUIA GENERAL PARA LA PROGRAMACIÓN DEL SISTEMA EVOLUPIC Bootloader 16F88 BOOTLOADER: AN1310 DE MICROCHIP INDICE 1. Información general sobre el programa Bootloader para el sistema EVOLUPIC-16F88. Auto-programador
1.2 SISTEMAS DE PRODUCCIÓN
 19 1.2 SISTEMAS DE PRODUCCIÓN Para operar en forma efectiva, una empresa manufacturera debe tener sistemas que le permitan lograr eficientemente el tipo de producción que realiza. Los sistemas de producción
19 1.2 SISTEMAS DE PRODUCCIÓN Para operar en forma efectiva, una empresa manufacturera debe tener sistemas que le permitan lograr eficientemente el tipo de producción que realiza. Los sistemas de producción
Contenido QUÉ ES SERVIDOR CLOUD?... 3 ACCESO AL SERVIDOR CLOUD... 3 ADMINISTRACIÓN DEL SISTEMA... 6
 Manual de Usuario "Servidor Cloud" Windows server 2012 Contenido QUÉ ES SERVIDOR CLOUD?... 3 ACCESO AL SERVIDOR CLOUD... 3 ADMINISTRACIÓN DEL SISTEMA... 6 Gestión de Usuarios... 7 Usuarios de Acceso Remoto...
Manual de Usuario "Servidor Cloud" Windows server 2012 Contenido QUÉ ES SERVIDOR CLOUD?... 3 ACCESO AL SERVIDOR CLOUD... 3 ADMINISTRACIÓN DEL SISTEMA... 6 Gestión de Usuarios... 7 Usuarios de Acceso Remoto...
Introducción al NASM. Convenciones de colores
 Introducción al NASM The Netwide Assembler MIA J. Rafael Rojano C. 1 Convenciones de colores Rojo= Directivas propias del nasm sin traducción directa a ensamblador Morado= Directivas del ensamblador En
Introducción al NASM The Netwide Assembler MIA J. Rafael Rojano C. 1 Convenciones de colores Rojo= Directivas propias del nasm sin traducción directa a ensamblador Morado= Directivas del ensamblador En
USO DEL SOFTWARE PROVIEW 32
 USO DEL SOFTWARE PROVIEW 32 Como primera parte se hace la instalación del software Proview 32, observando: Se da clic en el ejecutable y se inicia la instalación. La clave de software viene en el archivo
USO DEL SOFTWARE PROVIEW 32 Como primera parte se hace la instalación del software Proview 32, observando: Se da clic en el ejecutable y se inicia la instalación. La clave de software viene en el archivo
SoftXpand 2011 Guía de instalación rápida Página 1 SoftXpand 2011 Guía de instalación rápida
 SoftXpand 2011 Guía de instalación rápida Página 1 SoftXpand 2011 Guía de instalación rápida Recomendamos ampliamente seguir las instrucciones siguientes al instalar SoftXpand 2011. Instalación de SoftXpand
SoftXpand 2011 Guía de instalación rápida Página 1 SoftXpand 2011 Guía de instalación rápida Recomendamos ampliamente seguir las instrucciones siguientes al instalar SoftXpand 2011. Instalación de SoftXpand
Manual de uso del software. RoboPlus. Octubre 6. Interconectividad de dispositivos Nombre del profesor: Emilio Vargas Soto
 Manual de uso del software RoboPlus Octubre 6 Interconectividad de dispositivos Nombre del profesor: Emilio Vargas Soto Elaborado por: Andrés Ernesto López Sandoval. 164139 Martha Fernanda Iturbe Cejudo.
Manual de uso del software RoboPlus Octubre 6 Interconectividad de dispositivos Nombre del profesor: Emilio Vargas Soto Elaborado por: Andrés Ernesto López Sandoval. 164139 Martha Fernanda Iturbe Cejudo.
REGISTROS DE DESPLAZAMIENTO
 REGISTROS DE DESPLAZAMIENTO Es un circuito digital que acepta datos binarios de una fuente de entrada y luego los desplaza, un bit a la vez, a través de una cadena de flip-flops. Este sistema secuencial
REGISTROS DE DESPLAZAMIENTO Es un circuito digital que acepta datos binarios de una fuente de entrada y luego los desplaza, un bit a la vez, a través de una cadena de flip-flops. Este sistema secuencial
INTERRUPCIONES. La comunicación asíncrona de los sistemas periféricos con la CPU, en ambos sentidos, se puede establecer de dos maneras fundamentales:
 INTERRUPCIONES La comunicación asíncrona de los sistemas periféricos con la CPU, en ambos sentidos, se puede establecer de dos maneras fundamentales: a)consultas (POLLING): Se comprueban cíclicamente,
INTERRUPCIONES La comunicación asíncrona de los sistemas periféricos con la CPU, en ambos sentidos, se puede establecer de dos maneras fundamentales: a)consultas (POLLING): Se comprueban cíclicamente,
ACTIVIDADES TEMA 1. EL LENGUAJE DE LOS ORDENADORES. 4º E.S.O- SOLUCIONES.
 1.- a) Explica qué es un bit de información. Qué es el lenguaje binario? Bit es la abreviatura de Binary digit. (Dígito binario). Un bit es un dígito del lenguaje binario que es el lenguaje universal usado
1.- a) Explica qué es un bit de información. Qué es el lenguaje binario? Bit es la abreviatura de Binary digit. (Dígito binario). Un bit es un dígito del lenguaje binario que es el lenguaje universal usado
Control Teaching de un Brazo Robot de Cinco Grados de Libertad
 Control Teaching de un Brazo Robot de Cinco Grados de Libertad Michel Ibáñez [email protected] Christian R. Reátegui [email protected] Asesor: Ing. Antonio Moran [email protected] Universidad Peruana
Control Teaching de un Brazo Robot de Cinco Grados de Libertad Michel Ibáñez [email protected] Christian R. Reátegui [email protected] Asesor: Ing. Antonio Moran [email protected] Universidad Peruana
2.- PLATAFORMA ARDUINO (HARDWARE)
") 2.- PLATAFORMA ARDUINO (HARDWARE) La plataforma Arduino es una plataforma open-hardware basada en una sencilla placa con entradas y salidas (E/S), analógicas y digitales. El elemento principal el microcontrolador
2.- PLATAFORMA ARDUINO (HARDWARE) La plataforma Arduino es una plataforma open-hardware basada en una sencilla placa con entradas y salidas (E/S), analógicas y digitales. El elemento principal el microcontrolador
Preliminares. Tipos de variables y Expresiones
 Preliminares. Tipos de variables y Expresiones Felipe Osorio Instituto de Estadística Pontificia Universidad Católica de Valparaíso Marzo 5, 2015 1 / 20 Preliminares Computadoras desarrollan tareas a un
Preliminares. Tipos de variables y Expresiones Felipe Osorio Instituto de Estadística Pontificia Universidad Católica de Valparaíso Marzo 5, 2015 1 / 20 Preliminares Computadoras desarrollan tareas a un
DISEÑO E IMPLEMENTACIÓN DE UNA TARJETA DE ADQUISICIÓN DE DATOS PARA EL LABORATORIO DE TELECOMUNICACIONES DE LA FIEC.
 TESIS DISEÑO E IMPLEMENTACIÓN DE UNA TARJETA DE ADQUISICIÓN DE DATOS PARA EL LABORATORIO DE TELECOMUNICACIONES DE LA FIEC. DIRECTOR DE TESIS.- Ing. Francisco Novillo AUTOR Walter Mestanza Vera. Egresado
TESIS DISEÑO E IMPLEMENTACIÓN DE UNA TARJETA DE ADQUISICIÓN DE DATOS PARA EL LABORATORIO DE TELECOMUNICACIONES DE LA FIEC. DIRECTOR DE TESIS.- Ing. Francisco Novillo AUTOR Walter Mestanza Vera. Egresado
1. SISTEMAS DIGITALES
 1. SISTEMAS DIGITALES DOCENTE: ING. LUIS FELIPE CASTELLANOS CASTELLANOS CORREO ELECTRÓNICO: [email protected] [email protected] PAGINA WEB MAESTROFELIPE.JIMDO.COM 1.1. INTRODUCCIÓN
1. SISTEMAS DIGITALES DOCENTE: ING. LUIS FELIPE CASTELLANOS CASTELLANOS CORREO ELECTRÓNICO: [email protected] [email protected] PAGINA WEB MAESTROFELIPE.JIMDO.COM 1.1. INTRODUCCIÓN
Transformación de binario a decimal. Transformación de decimal a binario. ELECTRÓNICA DIGITAL
 ELECTRÓNICA DIGITAL La electrónica es la rama de la ciencia que se ocupa del estudio de los circuitos y de sus componentes, que permiten modificar la corriente eléctrica amplificándola, atenuándola, rectificándola
ELECTRÓNICA DIGITAL La electrónica es la rama de la ciencia que se ocupa del estudio de los circuitos y de sus componentes, que permiten modificar la corriente eléctrica amplificándola, atenuándola, rectificándola
SISTEMAS DE INFORMACIÓN II TEORÍA
 CONTENIDO: EL PROCESO DE DISEÑO DE SISTEMAS DISTRIBUIDOS MANEJANDO LOS DATOS EN LOS SISTEMAS DISTRIBUIDOS DISEÑANDO SISTEMAS PARA REDES DE ÁREA LOCAL DISEÑANDO SISTEMAS PARA ARQUITECTURAS CLIENTE/SERVIDOR
CONTENIDO: EL PROCESO DE DISEÑO DE SISTEMAS DISTRIBUIDOS MANEJANDO LOS DATOS EN LOS SISTEMAS DISTRIBUIDOS DISEÑANDO SISTEMAS PARA REDES DE ÁREA LOCAL DISEÑANDO SISTEMAS PARA ARQUITECTURAS CLIENTE/SERVIDOR
Capítulo 5 Programación del algoritmo en LabVIEW
 Programación del algoritmo en LabVIEW En este capítulo se describen las funciones que se emplearon para implementar el control PID wavenet en LabVIEW. El algoritmo wavenet fue implementado en LabVIEW para
Programación del algoritmo en LabVIEW En este capítulo se describen las funciones que se emplearon para implementar el control PID wavenet en LabVIEW. El algoritmo wavenet fue implementado en LabVIEW para
Interoperabilidad de Fieldbus
 2002 Emerson Process Management. Todos los derechos reservados. Vea este y otros cursos en línea en www.plantwebuniversity.com. Fieldbus 201 Interoperabilidad de Fieldbus Generalidades Qué es interoperabilidad?
2002 Emerson Process Management. Todos los derechos reservados. Vea este y otros cursos en línea en www.plantwebuniversity.com. Fieldbus 201 Interoperabilidad de Fieldbus Generalidades Qué es interoperabilidad?
NOTA DE APLICACIÓN AN-P002. Programando Wiring con NXProg
 NOTA DE APLICACIÓN AN-P002 Programando Wiring con NXProg Este documento se encuentra protegido por una licencia Creative Commons Creative Commons: Atribution, Non-commercial, Share Alike Atribución: Puede
NOTA DE APLICACIÓN AN-P002 Programando Wiring con NXProg Este documento se encuentra protegido por una licencia Creative Commons Creative Commons: Atribution, Non-commercial, Share Alike Atribución: Puede
DEPARTAMENTO ELECTRÓNICA PIC - TEMA 2 INTRODUCCIÓN A LOS MICROCONTROLADORES PIC
 DEPARTAMENTO ELECTRÓNICA PIC - TEMA 2 INTRODUCCIÓN A LOS MICROCONTROLADORES PIC 1 Los 'PIC' son una familia de microcontroladores tipo RISC fabricados por Microchip Technology Inc. y derivados del PIC1650,
DEPARTAMENTO ELECTRÓNICA PIC - TEMA 2 INTRODUCCIÓN A LOS MICROCONTROLADORES PIC 1 Los 'PIC' son una familia de microcontroladores tipo RISC fabricados por Microchip Technology Inc. y derivados del PIC1650,
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Problema a resolver Ejercicio 2.1 Tomando el ejercicio 1.4 realizar los ajustes necesarios para que además de encenderse un LED en pantalla se encienda un LED físicamente sobre la placa PIC suministrada
Problema a resolver Ejercicio 2.1 Tomando el ejercicio 1.4 realizar los ajustes necesarios para que además de encenderse un LED en pantalla se encienda un LED físicamente sobre la placa PIC suministrada
Circuitos Digitales II y Laboratorio Electrónica Digital II y Laboratorio
 Circuitos Digitales II y Laboratorio Electrónica Digital II y Laboratorio Fundamentos de Arquitectura de Computadores Modelo de von Neumann Profesor: Felipe Cabarcas Correo:[email protected] Oficina:
Circuitos Digitales II y Laboratorio Electrónica Digital II y Laboratorio Fundamentos de Arquitectura de Computadores Modelo de von Neumann Profesor: Felipe Cabarcas Correo:[email protected] Oficina:
UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3
 UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3 INTRODUCCIÓN El elemento hardware de un sistema básico de proceso de datos se puede estructurar en tres partes claramente diferenciadas en cuanto a sus funciones:
UNIDADES FUNCIONALES DEL ORDENADOR TEMA 3 INTRODUCCIÓN El elemento hardware de un sistema básico de proceso de datos se puede estructurar en tres partes claramente diferenciadas en cuanto a sus funciones:
MODOS DE DIRECCIONAMIENTO DEL µc51
 Los modos de direccionamiento son la manera que tienen los µc para accesar a los distintos recursos con los que cuenta. Para manipular los datos y códigos de operación en cada programa se tienen las siguientes
Los modos de direccionamiento son la manera que tienen los µc para accesar a los distintos recursos con los que cuenta. Para manipular los datos y códigos de operación en cada programa se tienen las siguientes
Contenido. Sistemas de Entrada/Salida. Categorias de los Dispositivos de Entrada/Salida. Categorias de los Dispositivos de Entrada/Salida
 Contenido Sistemas de Categorias de los Dispositivos de En qué se diferencian los dispositivos de? Técnicas para realizar la E/S Interrupciones Interfaces involucradas en E/S Buffering Categorias de los
Contenido Sistemas de Categorias de los Dispositivos de En qué se diferencian los dispositivos de? Técnicas para realizar la E/S Interrupciones Interfaces involucradas en E/S Buffering Categorias de los
Arquitectura basica de un computador
 Arquitectura basica de un computador Componentes o División básica de un computador Perifericos: Son todos los dispositivos de entrada (Input) y salida (Output): Monitor, Teclado, Ratón, Unidades de almacenamiento
Arquitectura basica de un computador Componentes o División básica de un computador Perifericos: Son todos los dispositivos de entrada (Input) y salida (Output): Monitor, Teclado, Ratón, Unidades de almacenamiento
podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que el
 CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
Fundamentos de Computadores I
 Universidad Rey Juan Carlos Fundamentos de Computadores I Luis Rincón Córcoles Programa 1. La familia de microprocesadores M68000 2. Características principales del MC68000 3. Modelo de programación del
Universidad Rey Juan Carlos Fundamentos de Computadores I Luis Rincón Córcoles Programa 1. La familia de microprocesadores M68000 2. Características principales del MC68000 3. Modelo de programación del
Ensamblador. Interrupciones. Dentro de una computadora existen dos clases de interrupciones:
 Ensamblador Interrupciones Definición: Una interrupción es el rompimiento en la secuencia de un programa para ejecutar un programa especial llamando una rutina de servicio cuya característica principal
Ensamblador Interrupciones Definición: Una interrupción es el rompimiento en la secuencia de un programa para ejecutar un programa especial llamando una rutina de servicio cuya característica principal
CLASIFICACIÓN DE LAS COMPUTADORAS. Ing. Erlinda Gutierrez Poma
 CLASIFICACIÓN DE LAS COMPUTADORAS Ing. Erlinda Gutierrez Poma Tipos de Computadoras Dentro de la evolución de las computadoras, han surgido diferentes equipos con diferentes tamaños y características según
CLASIFICACIÓN DE LAS COMPUTADORAS Ing. Erlinda Gutierrez Poma Tipos de Computadoras Dentro de la evolución de las computadoras, han surgido diferentes equipos con diferentes tamaños y características según
Unidad de trabajo 2: INFORMÁTICA BÁSICA (primera parte)
") Unidad de trabajo 2: INFORMÁTICA BÁSICA (primera parte) Unidad de trabajo 2: INFORMÁTICA BÁSICA... 1 1. Representación interna de datos.... 1 1.2. Sistemas de numeración.... 2 1.3. Aritmética binaria...
Unidad de trabajo 2: INFORMÁTICA BÁSICA (primera parte) Unidad de trabajo 2: INFORMÁTICA BÁSICA... 1 1. Representación interna de datos.... 1 1.2. Sistemas de numeración.... 2 1.3. Aritmética binaria...
Análisis general de un Microprocesador
 Análisis general de un Microprocesador Arquitectura del chip Repertorio de instrucciones Sistema mínimo Señales de control Función de cada pin del µp Herramientas de desarrollo Performance. ARQUITECTURA
Análisis general de un Microprocesador Arquitectura del chip Repertorio de instrucciones Sistema mínimo Señales de control Función de cada pin del µp Herramientas de desarrollo Performance. ARQUITECTURA
Sensor de Temperatura utilizando el Starter Kit Javelin Stamp. Realizado por: Bertha Palomeque A. Rodrigo Barzola J.
 Sensor de Temperatura utilizando el Starter Kit Javelin Stamp Realizado por: Bertha Palomeque A. Rodrigo Barzola J. INTRODUCCION DIFERENCIAS EJEMPLOS JAVA Orientado a Objetos Multiplataforma Programar
Sensor de Temperatura utilizando el Starter Kit Javelin Stamp Realizado por: Bertha Palomeque A. Rodrigo Barzola J. INTRODUCCION DIFERENCIAS EJEMPLOS JAVA Orientado a Objetos Multiplataforma Programar
Buceando en los MCUs Freescale...
 COMENTARIO TÉCNICO Buceando en los MCUs Freescale... Por Ing. Daniel Di Lella Dedicated Field Application Engineer www.edudevices.com.ar [email protected] Serie Flexis...... Como migrar de 8 a 32 Bits
COMENTARIO TÉCNICO Buceando en los MCUs Freescale... Por Ing. Daniel Di Lella Dedicated Field Application Engineer www.edudevices.com.ar [email protected] Serie Flexis...... Como migrar de 8 a 32 Bits
BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC MEMORIAS EEPROM SERIE
 BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC MEMORIAS EEPROM SERIE Fernando Nuño García 1 Ventajas del BUS I2C Definido inicialmente a mediados de los 80 para trabajar a 100kbit/s y en 1995
BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC MEMORIAS EEPROM SERIE Fernando Nuño García 1 Ventajas del BUS I2C Definido inicialmente a mediados de los 80 para trabajar a 100kbit/s y en 1995
1.2 Análisis de los Componentes. Arquitectura de Computadoras Rafael Vazquez Perez
 1.2 Análisis de los Componentes. Arquitectura de Computadoras Rafael Vazquez Perez 1.2.1 CPU 1 Arquitecturas. 2 Tipos. 3 Características. 4 Funcionamiento(ALU, unidad de control, Registros y buses internos)
1.2 Análisis de los Componentes. Arquitectura de Computadoras Rafael Vazquez Perez 1.2.1 CPU 1 Arquitecturas. 2 Tipos. 3 Características. 4 Funcionamiento(ALU, unidad de control, Registros y buses internos)
SINTESIS Y DESCRIPCIÓN DE CIRCUITOS DIGITALES UTILIZANDO VHDL ANTECEDENTES
 ANTECEDENTES En los últimos diez años la industria electrónica ha tenido una gran evolución en el desarrollo de sistemas digitales; desde computadoras personales, sistemas de audio y vídeo hasta dispositivos
ANTECEDENTES En los últimos diez años la industria electrónica ha tenido una gran evolución en el desarrollo de sistemas digitales; desde computadoras personales, sistemas de audio y vídeo hasta dispositivos
Figura 4.1 Clasificación de los lenguajes de bases de datos
 1 Colección de Tesis Digitales Universidad de las Américas Puebla Romero Martínez, Modesto Este capítulo describen los distintos lenguajes para bases de datos, la forma en que se puede escribir un lenguaje
1 Colección de Tesis Digitales Universidad de las Américas Puebla Romero Martínez, Modesto Este capítulo describen los distintos lenguajes para bases de datos, la forma en que se puede escribir un lenguaje
Sistemas de Numeración Operaciones - Códigos
 Sistemas de Numeración Operaciones - Códigos Tema 2 1. Sistema decimal 2. Sistema binario 3. Sistema hexadecimal 4. Sistema octal 5. Conversión decimal binario 6. Aritmética binaria 7. Complemento a la
Sistemas de Numeración Operaciones - Códigos Tema 2 1. Sistema decimal 2. Sistema binario 3. Sistema hexadecimal 4. Sistema octal 5. Conversión decimal binario 6. Aritmética binaria 7. Complemento a la
DISPOSITIVO DE ALMACENAMIENTO ESTANDAR PARA SOLUCION EMBEBIDA
 DISPOSITIVO DE ALMACENAMIENTO ESTANDAR PARA SOLUCION EMBEBIDA Di Giulio, Pablo Andrés / Grupo T.D.A. / Departamento de Ingeniería Electrónica / U.T.N. Facultad Regional San Francisco CONTEXTO El grupo
DISPOSITIVO DE ALMACENAMIENTO ESTANDAR PARA SOLUCION EMBEBIDA Di Giulio, Pablo Andrés / Grupo T.D.A. / Departamento de Ingeniería Electrónica / U.T.N. Facultad Regional San Francisco CONTEXTO El grupo
Capítulo 1 Introducción a la Computación
 Capítulo 1 Introducción a la Computación 1 MEMORIA PRINCIPAL (RAM) DISPOSITIVOS DE ENTRADA (Teclado, Ratón, etc) C P U DISPOSITIVOS DE SALIDA (Monitor, Impresora, etc.) ALMACENAMIENTO (Memoria Secundaria:
Capítulo 1 Introducción a la Computación 1 MEMORIA PRINCIPAL (RAM) DISPOSITIVOS DE ENTRADA (Teclado, Ratón, etc) C P U DISPOSITIVOS DE SALIDA (Monitor, Impresora, etc.) ALMACENAMIENTO (Memoria Secundaria:
Lenguajes de Programación
 Lenguajes de Programación Mediante los programas se indica a la computadora que tarea debe realizar y cómo efectuarla, pero para ello es preciso introducir estas órdenes en un lenguaje que el sistema pueda
Lenguajes de Programación Mediante los programas se indica a la computadora que tarea debe realizar y cómo efectuarla, pero para ello es preciso introducir estas órdenes en un lenguaje que el sistema pueda