podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que el
|
|
|
- Cristóbal Páez Ortíz
- hace 8 años
- Vistas:
Transcripción
1 CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que el robot funcione, primero es necesario transmitirle los datos de la interfase. Una vez recibidos todos los paquetes, el robot empieza a funcionar posicionándose en una de las coordenadas almacenadas, sensa el color de la ficha y la deposita en su contenedor correspondiente. (Ver figura 4.1). Realiza este proceso hasta que termina la última posición Control. El control del robot se realiza mediante un microcontrolador PIC 16F877 por medio de PWM (Pulse Width Modulation) o lo que es lo mismo "Modulación por Anchura de Pulso", que es uno de los sistemas más empleados para el control de servos (Ver figura 4.2). Este sistema consiste en generar una onda cuadrada, donde se varía el tiempo que el pulso está a nivel alto, manteniendo el mismo periodo (normalmente), con el objetivo de modificar la posición del servo según se desee. 30
. Realiza este proceso hasta que termina la última posición. 4.1. Control.")
2 Inicio Existen datos a transmitir? No Si Transmisión de datos Almacenamiento de los datos en el PIC Generación de las señales de PWM Posición X, Y, Zl, C Posición X, Y, Zl, A Posición X, Y, Zh, A Sensado de la pieza Posición X, Y, Zh, C La pieza es blanca? Si No Deposita la pieza en el contenedor de las piezas negras Deposita la pieza en el contenedor de las piezas blancas Última pieza? No Posición neutra final Si Fig Diagrama a bloques del funcionamiento del robot 31

3 Fig PWM para recorrer todo el rango de operación del servo Se eligió utilizar este microcontrolador por la capacidad que tiene en memoria flash de programa, donde no solo se almacenará el programa del microcontrolador, sino también la información que será transmitida de la computadora a éste. Existen muchas maneras para generar una onda PWM, pero en este proyecto la generaremos mediante un microcontrolador utilizando un temporizador y un comparador (interrupciones asociadas), de modo que el microcontrolador quede libre para realizar otras tareas, y la generación de la señal sea automática y más efectiva. Una vez que se tienen ordenados de menor a mayor los cinco anchos de pulso diferentes, se obtienen las diferencias entre el periodo y el ancho de pulso mas grande, el ancho de pulso mas grande y el segundo ancho de pulso mas grande, y así hasta el penúltimo ancho de pulso y el ancho de pulso mas pequeño (Ver figura 4.3) 32
, de modo que")
4 Fig Pulsos ordenados de menor a mayor y sus diferencias El mecanismo consiste en inicializar los pines del puerto, donde se van a generar las señales de PWM, a nivel alto es decir con un uno lógico. Después el comparador del microcontrolador se inicializa con el valor del ancho de pulso mas pequeño y se inicializa la cuenta del temporizador. Una vez que se produce una igualación de valores del temporizador y el comparador, es decir una interrupción del comparador, el pin del puerto que corresponde a ese ancho de pulso pasa de un uno a un cero lógico. Para continuar, se le suma la primera diferencia obtenida, al valor del comparador, por lo que éste esperará a que haya otra interrupción del comparador, es decir que se produzca otra igualación de valores del temporizador y el comparador, y así el pin del puerto que corresponde a ese ancho de pulso pasa de un uno a un cero lógico. 33

5 Este proceso continua hasta que los cinco pines del puerto se encuentran a nivel bajo, es decir con un cero lógico. Por último se le suma al comparador la última diferencia (periodo, menos el ancho de pulso mas grande), y cuando se produce una igualación con el valor del temporizador, todos los pines del puerto pasan de un cero lógico a un uno lógico, es decir de un nivel bajo a uno alto, y así se inicia otra vez todo el ciclo, teniendo así cinco señales diferentes de PWM con la misma frecuencia. (Ver figura 4.4). Una vez que termina el ciclo completo, es decir que ha completado las cinco posiciones donde se encontraban las piezas, el brazo se sitúa en una posición neutra, y vuelve a empezar el ciclo con los mismos valores, si se inicializa de nuevo el ciclo. Si se desea introducirle nuevos datos, es decir otras coordenadas al brazo robótico, se tiene que reiniciar el ciclo e interrumpirlo mediante la transmisión de los datos como se ha mencionado anteriormente, y después de haber terminado la transmisión empezará el ciclo de trabajo con las nuevas posiciones. Cabe mencionar que estas señales se generan en los pines RB0 al RB4 del microcontrolador. En la actualidad muchos microcontroladores disponen de hardware específico para realizar esta tarea, eso sí, consumiendo los recursos antes mencionados (temporizador y comparador). 34
.")
6 Inicio Inicializar pines del puerto con un uno lógico. Iniciar cuenta del temporizador Inicializar Existe igualación? No Si Último pulso? Si No Actualizar valor del comparador Poner pin del puerto en cero lógico Actualizar valor del comparador No Existe igualación? Si Fig Diagrama a bloques de la generación de la señal PWM 35

7 Precisión. El rango de operación de los servos es muy exacto. Cuando tenemos 0.8 ms, nuestro servo se va a colocar exactamente a los 0, cuando tenemos 1.6 ms, se coloca a la mitad de su rango, es decir a 90, y cuando tenemos 2.4 ms, se coloca a 180. Los valores intermedios entre estos valores se comportan en forma lineal como se muestra en la siguiente gráfica Grados Tiempo Gráfica 4.1. Ancho de pulso Vs. Grados del servo La precisión de los servos depende de que tan exacto podemos mandarle el ancho de pulso a éste. En este proyecto, la precisión depende de la resolución con la que se 36

8 cuenta para realizar los anchos de pulso. Entre mayor sea la resolución, mayor va a ser la precisión. En este caso tenemos una resolución de 16 bits dada por el temporizador del microcontrolador, lo que nos da una buena precisión, y un porcentaje muy pequeño de error, es decir, que de acuerdo al ancho de pulso requerido tenemos una pequeña variación de micro segundos entre el valor real y el que nos entrega el microcontrolador Precisión de la Pinza. Existen 2 posiciones principales de la pinza: cuando está abierta y cuando está cerrada. Cuando esta abierta, la distancia entre dedo y dedo es de 4 centímetros. Cuando el brazo baja a tomar la pieza, los dedos quedan entre la pieza. Después se cierra la pinza y la pieza estará sujeta por la misma. Si sabemos que las piezas son cilíndricas con un diámetro de 2.5 centímetros, entonces podemos ver que cuando la pinza baja para tomar la pieza antes de cerrarse, existe una separación de 2 centímetros entre la pieza y la pinza repartidos entre los dos lados. Si la pieza se encuentra movida dentro del rango de la pinza, cuando ésta se cierre para tomar la pieza, la pinza arrastrará la pieza y después la sujetará, con el riesgo de que se le resbale en dicha operación. Con lo anterior podemos ver que se puede tener un margen de error de casi medio centímetro de cada lado de la pieza, en el rango de la pinza, para poder tomarla. Cuando la pieza sale del rango de la pinza hacia delante o hacia atrás, ésta se le resbalará a la pinza y 37

9 no podrá sujetarla, por lo que el centro de la pieza siempre tendrá que estar alineado con el rango de la pinza para poder ser sujetada Detección de Color. Para realizar la detección de color se ocupa un sensor de reflexión óptica TCRT5000 (Ver figura 4.5). Este sensor se forma principalmente de dos partes: el emisor y el receptor.. Fig Sensor Ya que el sensor está formado por un diodo y un transistor, es necesario acoplarles unas resistencias para que exista flujo de corriente y asi funcione correctamente el sensor. Al diodo o led se le acopla una resistencia de 330 ohms para generar una corriente de 15 ma, suficiente para encenderlo, mientras que para que el fototransistor trabaje en sus regiones de corte y/o saturación, se le puso una resistemcia de 10 kohms así, cuando haya una corriente de base y se polarice el fototransistor, los 5 volts quedarán en la resistencia y se logrará un estado de saturación. Cabe aclarar que para que el transistor entre en su región de corte y/o saturación, no solo dependerá de los valores anteriormente mencionados, sino también de la distancia con 38

10 respecto a la superficie reflejante, ya que entre mayor sea ésta, menor será la corriente de base generada, ocasionando que el fototransistor no logre llegar a su región de saturación. Para tener valores mas exactos en la entrada del puerto del microcontrolador, se le acopló a la salida del sensor un comparador de voltaje LM339, para que cuando el sensor entrege voltajes en el rango de 0 a 2.5 volts, nos de a la salida del comparador cero volts; y cuando el sensor entrege voltajes en el rango de 2.6 a 5 volts, nos de a la salida del comparador cinco volts. De acuerdo a lo anterior colocamos dos resistencias de 10 Kohms a la entrada inversora del comparador para que con el divisor de voltaje, tengamos 2.5 volts para comparar y así contar con los rangos que deseamos. (Ver figura 4.6.) Cuando no existe una reflexión de luz en el sensor, es decir que se está sensando una pieza de color negro, obtenemos a la salida del circuito cinco volts o un uno lógico para efectos del microcontrolador; en cambio cuando se está sensando una pieza de color blanco, va a existir una reflexión en el sensor por lo que obtendremos a la salida del circuito cero volts o un cero lógico para efectos del microcontrolador. Fig Circuito del sensor 39

11 Cuando el robot se encuentra en la posición donde esta la pieza y cierra la pinza, el sensor envía al microcontrolador el dato del color de la pieza y de acuerdo a esta información, decide el microcontrolador a que contenedor va a depositarla Transmisión. Para poder realizar la transmisión de datos al microcontrolador se ocupa el puerto serial (Com 1) de la computadora. Para poder realizar nuestra transmisión se ocuparon tan solo tres cables del conector DB-9 (Ver figura 4.7): GND, pin 5, TX, pin 3 (transmisión) y RX, pin 2 (recepción). Para poder tener una transmisión entre la computadora y el microcontrolador es necesario acoplarle a éste un MAX232, ya que el microcontrolador tan solo recibe y transmite señales digitales con niveles TTL, mientras que la computadora transmite y recibe datos con señales digitales de 15 y +15 volts, y este componente realiza las transformaciones correspondientes. El MAX232 va conectado a los pines de transmisión y recepción del microcontrolador. El cable de GND del conector DB-9 se conectará junto con la tierra del sistema. El de TX se conecta al pin de recepción del MAX232, así como el de RX al pin de transmisión del MAX232. Fig Conector DB-9 40

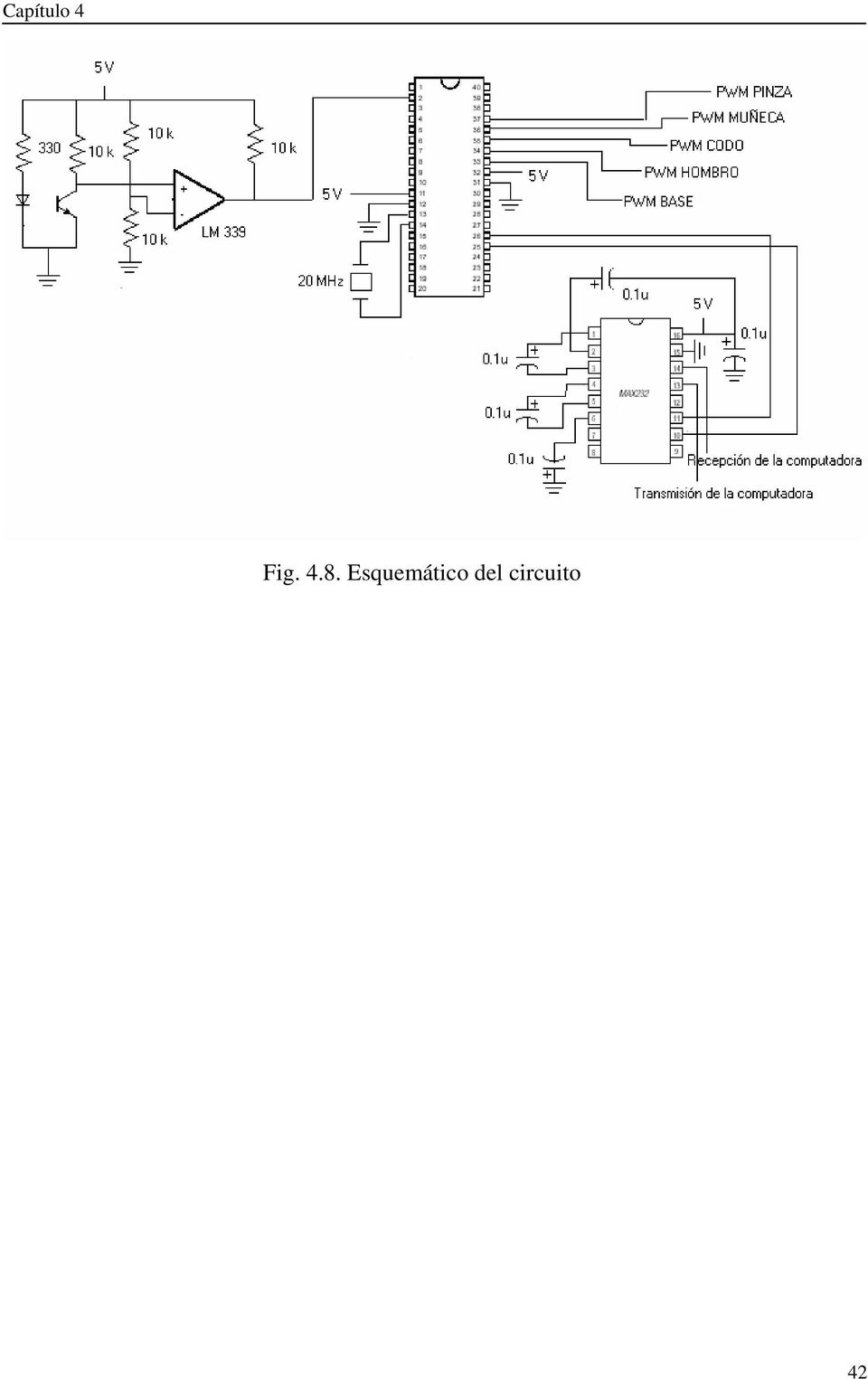
12 Cabe destacar que la información transmitida de la computadora al microcontrolador se almacena en la memoria flash de programa del microcontrolador, por lo que ésta no se borrara, a menos que se sobre escriba Funcionamiento del circuito. Se transmite todos los datos de la computadora al microcontrolador, teniendo de intermediario al MAX232 para convertir los niveles lógicos correspondientes. Una vez transmitidos todos los datos, el microcontrolador empieza a generar las señales de PWM en el puerto B, y poder generar las diferentes posiciones del brazo. Cuando la pinza colecta la pieza, el microcontrolador almacena el dato del color de la pieza entregado por el circuito del sensor, para tomar la decisión del lugar donde hay que depositarla. Una vez terminado todo el ciclo el microcontrolador sitúa al robot en una posición neutra, y empezara a realizar de nuevo el ciclo si es reseteado el microcontrolador. Todo el sistema electrónico, incluidos los servos, el sensor y el microcontrolador se alimentan con una fuente de voltaje de 5 volts. 41

13 Fig Esquemático del circuito 42
Una vez descrita la constitución general de un robot, podemos empezar con la
 CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
CAPÍTULO 2 Construcción y Mecanismo de Operación del Brazo Robótico Una vez descrita la constitución general de un robot, podemos empezar con la descripción de nuestro robot, cómo fue construido y cómo
5. Despliegue en la PC
 5 DESPLIEGUE EN LA PC 62 5.1 Conexión a la PC por medio de la tarjeta de audio La adquisición de señales analógicas es un trabajo que cada vez se hace más necesario en todos los campos relacionados con
5 DESPLIEGUE EN LA PC 62 5.1 Conexión a la PC por medio de la tarjeta de audio La adquisición de señales analógicas es un trabajo que cada vez se hace más necesario en todos los campos relacionados con
INGENIERIA EN MICROCONTROLADORES. Protocolo RS-485. Introducción
 INGENIERIA EN MICROCONTROLADORES Protocolo RS-485 Introducción P R O T O C O L O R S - 4 8 5 www.i-micro.com Ingeniería en Microcontroladores Teléfono 044 55 11 29 55 05 E-mail: cursos@i-micro.com elp@i-micro.com
INGENIERIA EN MICROCONTROLADORES Protocolo RS-485 Introducción P R O T O C O L O R S - 4 8 5 www.i-micro.com Ingeniería en Microcontroladores Teléfono 044 55 11 29 55 05 E-mail: cursos@i-micro.com elp@i-micro.com
Fig. 3.1 Brazo Mecánico Utilizado. que es capaz de girar igualmente 180º, (Fig. 3.1).
.") Capítulo 3 El Brazo Mecánico. En este capítulo se hablará de los aspectos generales del robot, en cuanto a su arquitectura respecta. Es importante dar crédito al Ing. Luís Maus Bolaños del departamento
Capítulo 3 El Brazo Mecánico. En este capítulo se hablará de los aspectos generales del robot, en cuanto a su arquitectura respecta. Es importante dar crédito al Ing. Luís Maus Bolaños del departamento
Capítulo I. Convertidores de CA-CD y CD-CA
 Capítulo I. Convertidores de CA-CD y CD-CA 1.1 Convertidor CA-CD Un convertidor de corriente alterna a corriente directa parte de un rectificador de onda completa. Su carga puede ser puramente resistiva,
Capítulo I. Convertidores de CA-CD y CD-CA 1.1 Convertidor CA-CD Un convertidor de corriente alterna a corriente directa parte de un rectificador de onda completa. Su carga puede ser puramente resistiva,
Este programa mueve cada motor de forma independiente, y cuando termina una línea pasa a la siguiente.
 1 Programa 1 Utilizando el icono añadimos un movimiento a por cada línea de programa. Podremos usar 8 posibles líneas de programa (Base, Hombro, Codo, Muñeca, Pinza, Salida 1, Salida 2 y línea en blanco).
1 Programa 1 Utilizando el icono añadimos un movimiento a por cada línea de programa. Podremos usar 8 posibles líneas de programa (Base, Hombro, Codo, Muñeca, Pinza, Salida 1, Salida 2 y línea en blanco).
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION
 CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
Maqueta: Osciloscopio y generador
 Maqueta: Osciloscopio y generador 1. Introducción Esta práctica se divide en dos partes. En la primera se desarrolla un osciloscopio digital basado en el ADC del 80C537 y la pantalla del PC. En la segunda
Maqueta: Osciloscopio y generador 1. Introducción Esta práctica se divide en dos partes. En la primera se desarrolla un osciloscopio digital basado en el ADC del 80C537 y la pantalla del PC. En la segunda
Conclusiones, aportaciones y sugerencias para futuros trabajos
 Capítulo 7 Conclusiones, aportaciones y sugerencias para futuros trabajos En este último capítulo se va a realizar una recapitulación de las conclusiones extraídas en cada uno de los capítulos del presente
Capítulo 7 Conclusiones, aportaciones y sugerencias para futuros trabajos En este último capítulo se va a realizar una recapitulación de las conclusiones extraídas en cada uno de los capítulos del presente
Esta fuente se encarga de convertir una tensión de ca a una tensión de cd proporcionando la corriente necesaria para la carga.
 Página 1 de 9 REGULADOR DE VOLTAJE DE cc La mayor parte de los circuitos electrónicos requieren voltajes de cd para operar. Una forma de proporcionar este voltaje es mediante baterías en donde se requieren
Página 1 de 9 REGULADOR DE VOLTAJE DE cc La mayor parte de los circuitos electrónicos requieren voltajes de cd para operar. Una forma de proporcionar este voltaje es mediante baterías en donde se requieren
La ventana de Microsoft Excel
 Actividad N 1 Conceptos básicos de Planilla de Cálculo La ventana del Microsoft Excel y sus partes. Movimiento del cursor. Tipos de datos. Metodología de trabajo con planillas. La ventana de Microsoft
Actividad N 1 Conceptos básicos de Planilla de Cálculo La ventana del Microsoft Excel y sus partes. Movimiento del cursor. Tipos de datos. Metodología de trabajo con planillas. La ventana de Microsoft
C A P Í T U L O 2 CIRCUITOS
 C A P Í T U L O 2 DIAGRAMAS ESQUEMÁTICOS Y PCB DE LOS CIRCUITOS 2.1. FUENTE DE PODER. Esta fuente de voltaje DC es del tipo de fuentes lineales; es decir utiliza un paso reductor de voltaje haciendo uso
C A P Í T U L O 2 DIAGRAMAS ESQUEMÁTICOS Y PCB DE LOS CIRCUITOS 2.1. FUENTE DE PODER. Esta fuente de voltaje DC es del tipo de fuentes lineales; es decir utiliza un paso reductor de voltaje haciendo uso
Quark Pro 2 Cargador de Microcontroladores PIC y Memorias EEPROM 24CXX
 Art Tapa - QuarkPro 2 19/2/04 2:09 PM Page 3 ARTÍCULO DE TAPA Quark Pro 2 Cargador de Microcontroladores PIC y Memorias EEPROM 24CXX Hemos desarrollado un prototipo económico, pero de alto desempeño para
Art Tapa - QuarkPro 2 19/2/04 2:09 PM Page 3 ARTÍCULO DE TAPA Quark Pro 2 Cargador de Microcontroladores PIC y Memorias EEPROM 24CXX Hemos desarrollado un prototipo económico, pero de alto desempeño para
APLICACIONES CON OPTOS
 APLICACIONES CON OPTOS Los modos básicos de operación de los optoacopladores son: por pulsos y lineal, en pulsos el LED sé switchea on-off (figura 4). En el modo lineal, la entrada es polarizada por una
APLICACIONES CON OPTOS Los modos básicos de operación de los optoacopladores son: por pulsos y lineal, en pulsos el LED sé switchea on-off (figura 4). En el modo lineal, la entrada es polarizada por una
Competencia de Robótica R2-D2 2014
 Competencia de Robótica R2-D2 2014 Categoría: Velocista Nombre del Robot: Miyagui Institución: UTN-FRA Participantes: Calvo, Juan Ignacio Schuster, Mariela Medina, Sergio Daniel Índice 1. Introducción...
Competencia de Robótica R2-D2 2014 Categoría: Velocista Nombre del Robot: Miyagui Institución: UTN-FRA Participantes: Calvo, Juan Ignacio Schuster, Mariela Medina, Sergio Daniel Índice 1. Introducción...
CAPITULO IV. Pruebas y resultados.
 CAPITULO IV. Pruebas y resultados. 4.1 Introducción En este capítulo, se comentarán las pruebas realizadas al prototipo. También, se comentarán los resultados obtenidos durante estas pruebas a razón de
CAPITULO IV. Pruebas y resultados. 4.1 Introducción En este capítulo, se comentarán las pruebas realizadas al prototipo. También, se comentarán los resultados obtenidos durante estas pruebas a razón de
Curso Internet Básico - Aularagon
 Antes de empezar es necesario que tengas claro algunas cosas: para configurar esta cuenta de correo, debes saber que el POP y el SMTP en este caso son mail.aragon.es; esta cuenta de correo hay que solicitarla
Antes de empezar es necesario que tengas claro algunas cosas: para configurar esta cuenta de correo, debes saber que el POP y el SMTP en este caso son mail.aragon.es; esta cuenta de correo hay que solicitarla
2.1 Funcionamiento del MPLS
 Capítulo 2 MPLS Básico En este capítulo se va a hablar sobre el funcionamiento de las redes MPLS para su mayor comprensión. Se habla sobre la red MPLS en general y las versatilidades que este tiene. También
Capítulo 2 MPLS Básico En este capítulo se va a hablar sobre el funcionamiento de las redes MPLS para su mayor comprensión. Se habla sobre la red MPLS en general y las versatilidades que este tiene. También
LABORATORIO Nº 2 GUÍA PARA REALIZAR FORMULAS EN EXCEL
 OBJETIVO Mejorar el nivel de comprensión y el manejo de las destrezas del estudiante para utilizar formulas en Microsoft Excel 2010. 1) DEFINICIÓN Una fórmula de Excel es un código especial que introducimos
OBJETIVO Mejorar el nivel de comprensión y el manejo de las destrezas del estudiante para utilizar formulas en Microsoft Excel 2010. 1) DEFINICIÓN Una fórmula de Excel es un código especial que introducimos
Curso de Iniciación a la Micro- Robótica. SigBot ACM Capítulo de estudiantes
 Curso de Iniciación a la Micro- Robótica SigBot ACM Capítulo de estudiantes Micro-robótica? La micro-robótica es la parte de la robótica que crea los robots más económicos y de fácil construcción para
Curso de Iniciación a la Micro- Robótica SigBot ACM Capítulo de estudiantes Micro-robótica? La micro-robótica es la parte de la robótica que crea los robots más económicos y de fácil construcción para
Medición de un potenciómetro sensor de posición de mariposa TPS
 Medición de un potenciómetro sensor de posición de mariposa TPS Par efectuar la comprobación de este componente utilizaremos un tester digital dispuesto en la opción de voltímetro de C.C. (DC Volts) y
Medición de un potenciómetro sensor de posición de mariposa TPS Par efectuar la comprobación de este componente utilizaremos un tester digital dispuesto en la opción de voltímetro de C.C. (DC Volts) y
PROPUESTAS COMERCIALES
 PROPUESTAS COMERCIALES 1. Alcance... 2 2. Entidades básicas... 2 3. Circuito... 2 3.1. Mantenimiento de rutas... 2 3.2. Añadir ofertas... 5 3.2.1. Alta desde CRM... 5 3.2.2. Alta desde el módulo de Propuestas
PROPUESTAS COMERCIALES 1. Alcance... 2 2. Entidades básicas... 2 3. Circuito... 2 3.1. Mantenimiento de rutas... 2 3.2. Añadir ofertas... 5 3.2.1. Alta desde CRM... 5 3.2.2. Alta desde el módulo de Propuestas
asegurar la calidad y aumentar la eficiencia. sistemas de variables que toman una infinidad de valores.
 79 3.3 Fundamentos de la ingeniería de control La ingeniería de control tiene por objeto el manejo automático de un proceso que de otra manera tendría que ser controlado manualmente. En muchas aplicaciones
79 3.3 Fundamentos de la ingeniería de control La ingeniería de control tiene por objeto el manejo automático de un proceso que de otra manera tendría que ser controlado manualmente. En muchas aplicaciones
EDWIN KÄMMERER ORCASITA INGENIERO ELECTRÓNICO
 Identifica los tipos de datos y funciones - Tipos de Datos: Excel soporta 5 tipos de datos, estos son: a) Numéricos: Están formados por cualquiera de los 10 dígitos (del 0 al 9) y pueden estar acompañados
Identifica los tipos de datos y funciones - Tipos de Datos: Excel soporta 5 tipos de datos, estos son: a) Numéricos: Están formados por cualquiera de los 10 dígitos (del 0 al 9) y pueden estar acompañados
Elementos de Microsoft Word
 Contenido 1. Distintas formas de iniciar Word 2007... 2 2. Ayuda de Word... 2 3. Las barras de herramientas... 3 4. Funcionamiento de las pestañas. Cómo funcionan?... 4 5. Personalizar barra de acceso
Contenido 1. Distintas formas de iniciar Word 2007... 2 2. Ayuda de Word... 2 3. Las barras de herramientas... 3 4. Funcionamiento de las pestañas. Cómo funcionan?... 4 5. Personalizar barra de acceso
GUÍA 5: CASOS DE PROBLEMAS AUTOMATIZACIÓN CON PLC
 GUÍA 5: CASOS DE PROBLEMAS AUTOMATIZACIÓN CON PLC 1. CONTROL DE UNA GRÚA Controlar la grúa para que realice los ciclos representados en la figura. Partiendo de la posición de reposo 1, realiza el ciclo
GUÍA 5: CASOS DE PROBLEMAS AUTOMATIZACIÓN CON PLC 1. CONTROL DE UNA GRÚA Controlar la grúa para que realice los ciclos representados en la figura. Partiendo de la posición de reposo 1, realiza el ciclo
Experimento 6 LAS LEYES DE KIRCHHOFF. Objetivos. Teoría. Figura 1 Un circuito con dos lazos y varios elementos
 Experimento 6 LAS LEYES DE KIRCHHOFF Objetivos 1. Describir las características de las ramas, los nodos y los lazos de un circuito, 2. Aplicar las leyes de Kirchhoff para analizar circuitos con dos lazos,
Experimento 6 LAS LEYES DE KIRCHHOFF Objetivos 1. Describir las características de las ramas, los nodos y los lazos de un circuito, 2. Aplicar las leyes de Kirchhoff para analizar circuitos con dos lazos,
DISEÑO DEL SOFTWARE TRAFFIC ANALYZER. Analyzer. En este capítulo se reporta el desarrollo que se llevó a cabo para realizar el software
 3 Diseño del Software Traffic Analyzer En este capítulo se reporta el desarrollo que se llevó a cabo para realizar el software que analiza el tráfico en redes de telefonía y computadoras, denominado Traffic
3 Diseño del Software Traffic Analyzer En este capítulo se reporta el desarrollo que se llevó a cabo para realizar el software que analiza el tráfico en redes de telefonía y computadoras, denominado Traffic
Tema 07: Acondicionamiento
 Tema 07: Acondicionamiento Solicitado: Ejercicios 02: Simulación de circuitos amplificadores Ejercicios 03 Acondicionamiento Lineal M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx
Tema 07: Acondicionamiento Solicitado: Ejercicios 02: Simulación de circuitos amplificadores Ejercicios 03 Acondicionamiento Lineal M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx
FORMACIÓN DE EQUIPOS DE E-LEARNING 2.0 MÓDULO DE DISEÑO Y PRODUCCIÓN DE MATERIALES UNIDAD 6 B
 141 1 FORMACIÓN DE EQUIPOS DE E-LEARNING 2.0 Unidad 6 B 142 2 Índice SEGUIMIENTO DE PERSONAS 1 INFORMES 2 143 3 SEGUIMIENTO DE PERSONAS E INFORMES EN MOODLE El seguimiento de los participantes en Moodle
141 1 FORMACIÓN DE EQUIPOS DE E-LEARNING 2.0 Unidad 6 B 142 2 Índice SEGUIMIENTO DE PERSONAS 1 INFORMES 2 143 3 SEGUIMIENTO DE PERSONAS E INFORMES EN MOODLE El seguimiento de los participantes en Moodle
Determinación de posición de AR, DEC y control de tapas para el telescopio de 1.5 m. Francisco Lazo Francisco Murillo Benjamin Martínez Eduardo López
 Determinación de posición de AR, DEC y control de tapas para el telescopio de 1.5 m. Francisco Lazo Francisco Murillo Benjamin Martínez Eduardo López Índice Pág. 1. Introducción 1 2. Descripción del Programa
Determinación de posición de AR, DEC y control de tapas para el telescopio de 1.5 m. Francisco Lazo Francisco Murillo Benjamin Martínez Eduardo López Índice Pág. 1. Introducción 1 2. Descripción del Programa
CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN. Figura 4.1.Caja Negra. Generar. Sistema de control. Acumular. Figura 4.2. Diagrama de funciones
 CAPÍTULO 4 37 CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN Para diseñar el SGE, lo primero que se necesita es plantear diferentes formas en las que se pueda resolver el problema para finalmente decidir
CAPÍTULO 4 37 CAPÍTULO 4. DISEÑO CONCEPTUAL Y DE CONFIGURACIÓN Para diseñar el SGE, lo primero que se necesita es plantear diferentes formas en las que se pueda resolver el problema para finalmente decidir
ZCARTAS: Iniciación a la suma y resta de números enteros... 4. Introducción... 4. Actividad 1: Escenario con cartas numeradas desde -2 hasta 2...
 CONTENIDO ZCARTAS: Iniciación a la suma y resta de números enteros... 4 Introducción... 4 Actividad 1: Escenario con cartas numeradas desde -2 hasta 2... 4 Contenidos trabajados... 4 Instrucciones de Scratch...
CONTENIDO ZCARTAS: Iniciación a la suma y resta de números enteros... 4 Introducción... 4 Actividad 1: Escenario con cartas numeradas desde -2 hasta 2... 4 Contenidos trabajados... 4 Instrucciones de Scratch...
ENTORNO DE TRABAJO DE WORD 2007
 ENTORNO DE TRABAJO DE WORD 2007 Esta nueva versión de Office no contiene las 4 barras que son comunes a versiones anteriores, en esta ocasión solo contiene una barra llamada barra de título, una banda
ENTORNO DE TRABAJO DE WORD 2007 Esta nueva versión de Office no contiene las 4 barras que son comunes a versiones anteriores, en esta ocasión solo contiene una barra llamada barra de título, una banda
Líneas de espera. Introducción.
 Líneas de espera. Introducción. En este capítulo se aplica la teoría de colas. Una Cola es una línea de espera y la teoría de colas es una colección de modelos matemáticos que describen sistemas de líneas
Líneas de espera. Introducción. En este capítulo se aplica la teoría de colas. Una Cola es una línea de espera y la teoría de colas es una colección de modelos matemáticos que describen sistemas de líneas
Nota Técnica Abril 2014
 LÁMPARAS LED QUE QUEDAN SEMIENCENDIDAS O PARPADEAN: En ocasiones ocurre que al realizar una sustitución en donde antes teníamos una halógena por una lámpara LED, la nueva lámpara se queda semiencendida
LÁMPARAS LED QUE QUEDAN SEMIENCENDIDAS O PARPADEAN: En ocasiones ocurre que al realizar una sustitución en donde antes teníamos una halógena por una lámpara LED, la nueva lámpara se queda semiencendida
Bienvenido al sistema de Curriculum Digital CVDigital
 CVDigital 1 Bienvenido al sistema de Curriculum Digital CVDigital Este programa se ha desarrollado con el fin de llevar a cabo Certificaciones y Recertificaciones de los profesionales a partir del ingreso
CVDigital 1 Bienvenido al sistema de Curriculum Digital CVDigital Este programa se ha desarrollado con el fin de llevar a cabo Certificaciones y Recertificaciones de los profesionales a partir del ingreso
M5-R. Receptor de telemando de 4 canales 2 circuitos. Modo Código Evolutivo. modo Código Multicanal. Versión 869 40km FSK...
 Receptor de telemando de 4 canales 2 circuitos. Puede ser alimentado a 220VCA, 24Vcc y 12Vc. Programable en modo monoestable, biestable, temporizado reiniciable, temporizado reseteable, modo especial riego,
Receptor de telemando de 4 canales 2 circuitos. Puede ser alimentado a 220VCA, 24Vcc y 12Vc. Programable en modo monoestable, biestable, temporizado reiniciable, temporizado reseteable, modo especial riego,
Sesión 3 - Movimiento Diferencial
 Sesión 3 - Movimiento Diferencial Qué aprenderemos en esta sesión? Para entender como nuestro robot se va a desplazar por cualquier superficie, debemos aprender la manera en que lo hace, por eso, en esta
Sesión 3 - Movimiento Diferencial Qué aprenderemos en esta sesión? Para entender como nuestro robot se va a desplazar por cualquier superficie, debemos aprender la manera en que lo hace, por eso, en esta
Capítulo I Introducción
 1.1 Voz sobre IP (VoIP) El término de VoIP (Voice over Internet Protocol) [1] se ha utilizado como término general en la industria para referirse a un gran grupo de tecnologías diseñadas para proveer servicios
1.1 Voz sobre IP (VoIP) El término de VoIP (Voice over Internet Protocol) [1] se ha utilizado como término general en la industria para referirse a un gran grupo de tecnologías diseñadas para proveer servicios
Circuitos Digitales CON José Manuel Ruiz Gutiérrez
 Circuitos Digitales CON José Manuel Ruiz Gutiérrez j.m.r.gutierrez@gmail.com PRÁCTICAS DE CIRCUITOS DIGITALES Circuitos digitales básicos 1. Simulación de operadores lógicos básicos. Realizar la simulación
Circuitos Digitales CON José Manuel Ruiz Gutiérrez j.m.r.gutierrez@gmail.com PRÁCTICAS DE CIRCUITOS DIGITALES Circuitos digitales básicos 1. Simulación de operadores lógicos básicos. Realizar la simulación
2. Almacén. 2.1 Paso a Histórico a Fecha. 2.2 Mantenimiento de Productos Ocultar datos
 2. Almacén 2.1 Paso a Histórico a Fecha Nuevo proceso de paso a Histórico de Movimientos de Almacén y de Ubicaciones a una fecha y generación de movimiento de Inicialización con el resultado resumido del
2. Almacén 2.1 Paso a Histórico a Fecha Nuevo proceso de paso a Histórico de Movimientos de Almacén y de Ubicaciones a una fecha y generación de movimiento de Inicialización con el resultado resumido del
Uso del programa CALC
 Uso del programa CALC 1. Introducción. Podemos considerar una hoja de cálculo como una tabla en la que tenemos texto, números y fórmulas relacionadas entre si. La ventaja de usar dicho programa radica
Uso del programa CALC 1. Introducción. Podemos considerar una hoja de cálculo como una tabla en la que tenemos texto, números y fórmulas relacionadas entre si. La ventaja de usar dicho programa radica
 Diapositiva 1 Para presentar los semiconductores, es útil empezar revisando los conductores. Hay dos perspectivas desde las que se puede explorar la conducción: 1) podemos centrarnos en los dispositivos
Diapositiva 1 Para presentar los semiconductores, es útil empezar revisando los conductores. Hay dos perspectivas desde las que se puede explorar la conducción: 1) podemos centrarnos en los dispositivos
El mundo de los PIC. Un PICmicro es un circuito integrado programable. Microchip, su fabricante dice: Programable Integrated Circuit.
 El mundo de los PIC Un PICmicro es un circuito integrado programable. Microchip, su fabricante dice: Programable Integrated Circuit. Programable quiere decir que se puede planificar la manera como va a
El mundo de los PIC Un PICmicro es un circuito integrado programable. Microchip, su fabricante dice: Programable Integrated Circuit. Programable quiere decir que se puede planificar la manera como va a
El Vehículo Eléctrico
 CAPÍTULO 4 El Vehículo Eléctrico 4.1 INTRODUCCIÓN. Como se mencionó a lo largo del capítulo 1, el sistema se desarrolla sobre un vehículo eléctrico infantil, cuyo funcionamiento difiere, en gran medida,
CAPÍTULO 4 El Vehículo Eléctrico 4.1 INTRODUCCIÓN. Como se mencionó a lo largo del capítulo 1, el sistema se desarrolla sobre un vehículo eléctrico infantil, cuyo funcionamiento difiere, en gran medida,
Tema 4: Problemas aritméticos.
 Tema 4: Problemas aritméticos. Ejercicio 1. Cómo se pueden repartir 2.310 entre tres hermanos de forma que al mayor le corresponda la mitad que al menor y a este el triple que al mediano? El reparto ha
Tema 4: Problemas aritméticos. Ejercicio 1. Cómo se pueden repartir 2.310 entre tres hermanos de forma que al mayor le corresponda la mitad que al menor y a este el triple que al mediano? El reparto ha
Partes, módulos y aplicaciones de un Controlador de Procesos
 Partes, módulos y aplicaciones de un Controlador de Procesos Conceptos PLC Un controlador lógico programable es un sistema que originalmente fue desarrollado para la industria de manufactura, en particular
Partes, módulos y aplicaciones de un Controlador de Procesos Conceptos PLC Un controlador lógico programable es un sistema que originalmente fue desarrollado para la industria de manufactura, en particular
Tema : ELECTRÓNICA DIGITAL
 (La Herradura Granada) Departamento de TECNOLOGÍA Tema : ELECTRÓNICA DIGITAL.- Introducción. 2.- Representación de operadores lógicos. 3.- Álgebra de Boole. 3..- Operadores básicos. 3.2.- Función lógica
(La Herradura Granada) Departamento de TECNOLOGÍA Tema : ELECTRÓNICA DIGITAL.- Introducción. 2.- Representación de operadores lógicos. 3.- Álgebra de Boole. 3..- Operadores básicos. 3.2.- Función lógica
Enviar solicitud. www.funding-guide.de. Procedimiento
 Enviar solicitud Procedimiento 1. Si usted desea hacer una solicitud de beca mediante el portal del DAAD, tome en cuenta que el acceso se hace mediante el banco de datos de becas del DAAD y no directamente
Enviar solicitud Procedimiento 1. Si usted desea hacer una solicitud de beca mediante el portal del DAAD, tome en cuenta que el acceso se hace mediante el banco de datos de becas del DAAD y no directamente
MAXWELL ROBOT SEGUIDOR DE LINEA
 MAXWELL ROBOT SEGUIDOR DE LINEA Carlos Mauricio Márquez Lozano Universidad Pontificia Bolivariana Seccional Bucaramanga Kilómetro 7 vía a Piedecuesta K_malquez@hotmail.com Resumen: MAXWELL, es un seguidor
MAXWELL ROBOT SEGUIDOR DE LINEA Carlos Mauricio Márquez Lozano Universidad Pontificia Bolivariana Seccional Bucaramanga Kilómetro 7 vía a Piedecuesta K_malquez@hotmail.com Resumen: MAXWELL, es un seguidor
Capítulo 7 95. Ya que se ha construido el prototipo y se han instalado los actuadores que lo
 Capítulo 7 95 CAPÍTULO SIETE: SENSORES Ya que se ha construido el prototipo y se han instalado los actuadores que lo moverán, es necesario retroalimentar este movimiento a un sistema de control. En la
Capítulo 7 95 CAPÍTULO SIETE: SENSORES Ya que se ha construido el prototipo y se han instalado los actuadores que lo moverán, es necesario retroalimentar este movimiento a un sistema de control. En la
GUÍA TÉCNICA PARA LA DEFINICIÓN DE COMPROMISOS DE CALIDAD Y SUS INDICADORES
 GUÍA TÉCNICA PARA LA DEFINICIÓN DE COMPROMISOS DE CALIDAD Y SUS INDICADORES Tema: Cartas de Servicios Primera versión: 2008 Datos de contacto: Evaluación y Calidad. Gobierno de Navarra. evaluacionycalidad@navarra.es
GUÍA TÉCNICA PARA LA DEFINICIÓN DE COMPROMISOS DE CALIDAD Y SUS INDICADORES Tema: Cartas de Servicios Primera versión: 2008 Datos de contacto: Evaluación y Calidad. Gobierno de Navarra. evaluacionycalidad@navarra.es
Herramienta Solver. Activar Excel Solver
 Herramienta Solver Introducción: Solver forma parte de una serie de comandos a veces denominados herramientas de análisis Y si. Con Solver, puede encontrar un valor óptimo (mínimo o máximo) para una fórmula
Herramienta Solver Introducción: Solver forma parte de una serie de comandos a veces denominados herramientas de análisis Y si. Con Solver, puede encontrar un valor óptimo (mínimo o máximo) para una fórmula
Capitulo V Administración de memoria
 Capitulo V Administración de memoria Introducción. Una de las tareas más importantes y complejas de un sistema operativo es la gestión de memoria. La gestión de memoria implica tratar la memoria principal
Capitulo V Administración de memoria Introducción. Una de las tareas más importantes y complejas de un sistema operativo es la gestión de memoria. La gestión de memoria implica tratar la memoria principal
NOVEDADES Y MEJORAS. datahotel versión 9.00 TRABAJAR CON I.V.A INCLUIDO
 NOVEDADES Y MEJORAS Continuando con nuestra política de mejora, innovación y desarrollo, le presentamos la nueva versión 9.00 de datahotel que se enriquece con nuevas funcionalidades que aportan soluciones
NOVEDADES Y MEJORAS Continuando con nuestra política de mejora, innovación y desarrollo, le presentamos la nueva versión 9.00 de datahotel que se enriquece con nuevas funcionalidades que aportan soluciones
Tienda Virtual Synergy (Parte 2)
") Tienda Virtual Synergy (Parte 2) El catálogo electrónico de productos es la base de toda la aplicación por lo que siempre será necesario instalarlo. Los siguientes dos módulos (tienda virtual y módulo
Tienda Virtual Synergy (Parte 2) El catálogo electrónico de productos es la base de toda la aplicación por lo que siempre será necesario instalarlo. Los siguientes dos módulos (tienda virtual y módulo
Ensamblador. Interrupciones. Dentro de una computadora existen dos clases de interrupciones:
 Ensamblador Interrupciones Definición: Una interrupción es el rompimiento en la secuencia de un programa para ejecutar un programa especial llamando una rutina de servicio cuya característica principal
Ensamblador Interrupciones Definición: Una interrupción es el rompimiento en la secuencia de un programa para ejecutar un programa especial llamando una rutina de servicio cuya característica principal
Aplicaciones Lineales
 Aplicaciones Lineales Ejercicio Dada la matriz A = 0 2 0 a) Escribir explícitamente la aplicación lineal f : 2 cuya matriz asociada con respecto a las bases canónicas es A. En primer lugar definimos las
Aplicaciones Lineales Ejercicio Dada la matriz A = 0 2 0 a) Escribir explícitamente la aplicación lineal f : 2 cuya matriz asociada con respecto a las bases canónicas es A. En primer lugar definimos las
Programa para el Mejoramiento de la Enseñanza de la Matemática en ANEP Proyecto: Análisis, Reflexión y Producción. Fracciones
 Fracciones. Las fracciones y los números Racionales Las fracciones se utilizan cotidianamente en contextos relacionados con la medida, el reparto o como forma de relacionar dos cantidades. Tenemos entonces
Fracciones. Las fracciones y los números Racionales Las fracciones se utilizan cotidianamente en contextos relacionados con la medida, el reparto o como forma de relacionar dos cantidades. Tenemos entonces
Índice general de materias LECCIÓN 7 74
 Índice general de materias LECCIÓN 7 74 BUSCAR 74 BUSCAR CON FORMATO 77 REEMPLAZAR 78 REEMPLAZAR CON FORMATO 79 NOTAS AL PIE DE PÁGINA 79 CONFIGURAR LAS NOTAS 81 INSERTAR NOTAS AL PIE 83 MODIFICAR NOTAS
Índice general de materias LECCIÓN 7 74 BUSCAR 74 BUSCAR CON FORMATO 77 REEMPLAZAR 78 REEMPLAZAR CON FORMATO 79 NOTAS AL PIE DE PÁGINA 79 CONFIGURAR LAS NOTAS 81 INSERTAR NOTAS AL PIE 83 MODIFICAR NOTAS
TRANSISTORES DE EFECTO DE CAMPO
 TRASISTORES DE EFECTO DE CAMO Oscar Montoya Figueroa Los FET s En el presente artículo hablaremos de las principales características de operación y construcción de los transistores de efecto de campo (FET
TRASISTORES DE EFECTO DE CAMO Oscar Montoya Figueroa Los FET s En el presente artículo hablaremos de las principales características de operación y construcción de los transistores de efecto de campo (FET
Título: «El ordenador del futuro» emisión 161 (23/06/2013) temporada 17
 temporada 17") Entrevista de Eduard Punset con Juan Ignacio Cirac, director de la División Teórica del Instituto Max Planck de Óptica Cuántica. Castelldefels, 25 de abril del 2013. Vídeo del programa: http://www.redesparalaciencia.com/?p=8918
Entrevista de Eduard Punset con Juan Ignacio Cirac, director de la División Teórica del Instituto Max Planck de Óptica Cuántica. Castelldefels, 25 de abril del 2013. Vídeo del programa: http://www.redesparalaciencia.com/?p=8918
Práctica 4 Diseño de circuitos con puertas lógicas.
 Práctica 4 Diseño de circuitos con puertas lógicas. Descripción de la práctica: -Esta práctica servirá para afianzar los conocimientos adquiridos hasta ahora de simplificación, e implementación de funciones,
Práctica 4 Diseño de circuitos con puertas lógicas. Descripción de la práctica: -Esta práctica servirá para afianzar los conocimientos adquiridos hasta ahora de simplificación, e implementación de funciones,
Generador Solar de Energía Eléctrica a 200W CAPÍTULO V. Planteamiento del problema, parámetros y diseño fotovoltaico
 CAPÍTULO V Planteamiento del problema, parámetros y diseño fotovoltaico 5.1 Objetivo general El objetivo general de esta tesis es generar energía eléctrica por medio de la luz solar, con la finalidad de
CAPÍTULO V Planteamiento del problema, parámetros y diseño fotovoltaico 5.1 Objetivo general El objetivo general de esta tesis es generar energía eléctrica por medio de la luz solar, con la finalidad de
Actividad: Qué es la energía mecánica?
 Qué es la energía mecánica? Nivel: º medio Subsector: Ciencias físicas Unidad temática: Ver video Conservación de la energía Actividad: Qué es la energía mecánica? Por qué se mueve un cuerpo? Qué tiene
Qué es la energía mecánica? Nivel: º medio Subsector: Ciencias físicas Unidad temática: Ver video Conservación de la energía Actividad: Qué es la energía mecánica? Por qué se mueve un cuerpo? Qué tiene
6. Controlador del Motor
 6. Controlador del Motor 82 6.1 Introducción: El controlador es el dispositivo encargado de controlar el motor, dependiendo de las señales que le llegan a través del programador de mano y las señales provenientes
6. Controlador del Motor 82 6.1 Introducción: El controlador es el dispositivo encargado de controlar el motor, dependiendo de las señales que le llegan a través del programador de mano y las señales provenientes
ESPAÑOL BLACK-VS. Guía de uso e instalación
 ESPAÑOL BLACK-VS Guía de uso e instalación ÍNDICE 1 INTRODUCCIÓN... 2 2 INSTALACIÓN Y PUESTA EN MARCHA... 2 3 REGISTRO DE LA APLICACIÓN... 4 4 CONFIGURACIÓN DE LAS CONEXIONES... 6 5 CONEXIÓN... 9 5.1
ESPAÑOL BLACK-VS Guía de uso e instalación ÍNDICE 1 INTRODUCCIÓN... 2 2 INSTALACIÓN Y PUESTA EN MARCHA... 2 3 REGISTRO DE LA APLICACIÓN... 4 4 CONFIGURACIÓN DE LAS CONEXIONES... 6 5 CONEXIÓN... 9 5.1
CASO PRÁCTICO DISTRIBUCIÓN DE COSTES
 CASO PRÁCTICO DISTRIBUCIÓN DE COSTES Nuestra empresa tiene centros de distribución en tres ciudades europeas: Zaragoza, Milán y Burdeos. Hemos solicitado a los responsables de cada uno de los centros que
CASO PRÁCTICO DISTRIBUCIÓN DE COSTES Nuestra empresa tiene centros de distribución en tres ciudades europeas: Zaragoza, Milán y Burdeos. Hemos solicitado a los responsables de cada uno de los centros que
Manual de OpenOffice Impress
 Manual de OpenOffice Impress. Capítulo 4. Trabajando con gráficos, esquemas y plantillas 1 Manual de OpenOffice Impress Capítulo 4: Trabajando con gráficos, esquemas y plantillas Este material es una adaptación
Manual de OpenOffice Impress. Capítulo 4. Trabajando con gráficos, esquemas y plantillas 1 Manual de OpenOffice Impress Capítulo 4: Trabajando con gráficos, esquemas y plantillas Este material es una adaptación
P/. Factura Electrónica D/. Manual de Usuario Proveedores
 Control documental Versión del Fecha Autor Modificaciones/Comentarios documento 1.0 10/02/2011 Diputación de Teruel Versión inicial del documento 1.1 05/04/2011 Diputación de Teruel Revisado estilo 1.2
Control documental Versión del Fecha Autor Modificaciones/Comentarios documento 1.0 10/02/2011 Diputación de Teruel Versión inicial del documento 1.1 05/04/2011 Diputación de Teruel Revisado estilo 1.2
Para crear formularios se utiliza la barra de herramientas Formulario, que se activa a través del comando Ver barra de herramientas.
 Formularios TEMA: FORMULARIOS. 1. INTRODUCCIÓN. 2. CREACIÓN DE FORMULARIOS. 3. INTRODUCIR DATOS EN UN FORMULARIO. 4. MODIFICAR UN FORMULARIO 5. MANERAS DE GUARDAR UN FORMULARIO. 6. IMPRIMIR FORMULARIOS.
Formularios TEMA: FORMULARIOS. 1. INTRODUCCIÓN. 2. CREACIÓN DE FORMULARIOS. 3. INTRODUCIR DATOS EN UN FORMULARIO. 4. MODIFICAR UN FORMULARIO 5. MANERAS DE GUARDAR UN FORMULARIO. 6. IMPRIMIR FORMULARIOS.
TEMA 3. TONOS Y VCOs
 TEMA 3 TONOS Y VCOs En los capítulos anteriores hemos visto más o menos como funciona un sintetizador analógico, hemos descubierto los misterios de la síntesis de onda, y visto así por encima como funciona
TEMA 3 TONOS Y VCOs En los capítulos anteriores hemos visto más o menos como funciona un sintetizador analógico, hemos descubierto los misterios de la síntesis de onda, y visto así por encima como funciona
Eduardo Kido 26-Mayo-2004 ANÁLISIS DE DATOS
 ANÁLISIS DE DATOS Hoy día vamos a hablar de algunas medidas de resumen de datos: cómo resumir cuando tenemos una serie de datos numéricos, generalmente en variables intervalares. Cuando nosotros tenemos
ANÁLISIS DE DATOS Hoy día vamos a hablar de algunas medidas de resumen de datos: cómo resumir cuando tenemos una serie de datos numéricos, generalmente en variables intervalares. Cuando nosotros tenemos
www.educanet.co 902 010 048 www.iesfacil.com
 En las siguientes páginas de este manual vamos a enseñarles de una forma sencilla como realizar el envío de mensajes desde el perfil del profesor y de jefatura de estudios que ofrece el programa IESFácil.
En las siguientes páginas de este manual vamos a enseñarles de una forma sencilla como realizar el envío de mensajes desde el perfil del profesor y de jefatura de estudios que ofrece el programa IESFácil.
UNIDAD DE TRABAJO Nº2. INSTALACIONES DE MEGAFONÍA. UNIDAD DE TRABAJO Nº2.1. Descripción de Componentes. Simbología AURICULARES
 UNIDAD DE TRABAJO Nº2. INSTALACIONES DE MEGAFONÍA UNIDAD DE TRABAJO Nº2.1. Descripción de Componentes. Simbología 2. Auriculares. Descripción. AURICULARES Son transductores electroacústicos que, al igual
UNIDAD DE TRABAJO Nº2. INSTALACIONES DE MEGAFONÍA UNIDAD DE TRABAJO Nº2.1. Descripción de Componentes. Simbología 2. Auriculares. Descripción. AURICULARES Son transductores electroacústicos que, al igual
Sistema de Gestión Académica TESEO. Revisión 1.0. Servicio de Informática Área de Gestión (GESTIÓN DE RESÚMENES DE TESIS DOCTORALES)
") Sistema de Gestión Académica TESEO (GESTIÓN DE RESÚMENES DE TESIS DOCTORALES) Revisión 1.0 Servicio de Informática Área de Gestión Mayo de 2004 INDICE INDICE... 1 1 Introducción... 1 2 Procedimiento....
Sistema de Gestión Académica TESEO (GESTIÓN DE RESÚMENES DE TESIS DOCTORALES) Revisión 1.0 Servicio de Informática Área de Gestión Mayo de 2004 INDICE INDICE... 1 1 Introducción... 1 2 Procedimiento....
Proyecto Prototipo Domótica
 Proyecto Prototipo Domótica Alumnos: Marcelo Mella Urrutia David Moena Quijada Carlos Román Saavedra Sergio Sánchez Reyes Profesor: Yussef Farrán Fecha Entrega: 20 de Junio de 2005 TEMARIO INTRODUCCIÓN..3
Proyecto Prototipo Domótica Alumnos: Marcelo Mella Urrutia David Moena Quijada Carlos Román Saavedra Sergio Sánchez Reyes Profesor: Yussef Farrán Fecha Entrega: 20 de Junio de 2005 TEMARIO INTRODUCCIÓN..3
NemoTPV SAT Manual de usuario 1. NemoTPV SAT APLICACIÓN DE GESTIÓN DE SERVICIO TÉCNICO PARA PUNTOS DE VENTA DE EUSKALTEL
 NemoTPV SAT Manual de usuario 1 NemoTPV SAT APLICACIÓN DE GESTIÓN DE SERVICIO TÉCNICO PARA PUNTOS DE VENTA DE EUSKALTEL NemoTPV SAT Manual de usuario 2 Ante un problema, lo importante no es saber solucionarlo,
NemoTPV SAT Manual de usuario 1 NemoTPV SAT APLICACIÓN DE GESTIÓN DE SERVICIO TÉCNICO PARA PUNTOS DE VENTA DE EUSKALTEL NemoTPV SAT Manual de usuario 2 Ante un problema, lo importante no es saber solucionarlo,
Tema 1. Curso 2015/16 Semestre 1. Supuesto 1. Supuesto 2.
 Tema 1 Supuesto 1. Curso 2015/16 Semestre 1 Un fabricante de cables de interconexión está diseñando un cable para ser usado como interfaz digital de alta velocidad entre dos equipos. Con el fin de ofrecer
Tema 1 Supuesto 1. Curso 2015/16 Semestre 1 Un fabricante de cables de interconexión está diseñando un cable para ser usado como interfaz digital de alta velocidad entre dos equipos. Con el fin de ofrecer
5.8. REGISTRO DE FACTURAS.
 5.8. REGISTRO DE FACTURAS. Una factura es un documento probatorio de la realización de una operación económica que especifica cantidades, concepto, precio y demás condiciones de la operación. Este módulo
5.8. REGISTRO DE FACTURAS. Una factura es un documento probatorio de la realización de una operación económica que especifica cantidades, concepto, precio y demás condiciones de la operación. Este módulo
CAN BUS Controller Area Network:
 CAN BUS Controller Area Network: Protocolo de comunicación Serie creado en los 80s por Bosch inicialmente para la comunicación entre controles del automóvil. Reduce el cableado y permite agregar funciones
CAN BUS Controller Area Network: Protocolo de comunicación Serie creado en los 80s por Bosch inicialmente para la comunicación entre controles del automóvil. Reduce el cableado y permite agregar funciones
EL MODELO DE ESTRATIFICACIÓN POR CAPAS DE TCP/IP DE INTERNET
 1 EL MODELO DE ESTRATIFICACIÓN POR CAPAS DE TCP/IP DE INTERNET Cada capa de la pila añade a los datos a enviar a la capa inferior, información de control para que el envío sea correcto. Esta información
1 EL MODELO DE ESTRATIFICACIÓN POR CAPAS DE TCP/IP DE INTERNET Cada capa de la pila añade a los datos a enviar a la capa inferior, información de control para que el envío sea correcto. Esta información
Manual de usuario Sucursal Virtual
 INDICE 1. Introducción 2. Requerimientos 3. Página Inicial 4. Registro 4.1 Registro con tarjeta de débito 4.2 Registro con clave de acceso 5. Acceso a 6. Pestaña Consultas 6.1 Saldo de cuentas 6.1.1 Saldo
INDICE 1. Introducción 2. Requerimientos 3. Página Inicial 4. Registro 4.1 Registro con tarjeta de débito 4.2 Registro con clave de acceso 5. Acceso a 6. Pestaña Consultas 6.1 Saldo de cuentas 6.1.1 Saldo
SERVOMOTORES. Los servos se utilizan frecuentemente en sistemas de radiocontrol, mecatrónicos y robótica, pero su uso no está limitado a estos.
 SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
SERVOMOTORES Un servomotor (también llamado Servo) es un dispositivo similar a un motor DC, que tiene la capacidad de ubicarse en cualquier posición dentro de su rango de operación y mantenerse estable
Diseño e Implementación de un Sistema de Monitoreo Inalámbrico para Sistemas Embebidos
 I CONGRESO VIRTUAL DE MICROCONTROLADORES Y SUS APLICACIONES 1 Diseño e Implementación de un Sistema de Monitoreo Inalámbrico para Sistemas Embebidos Juan Felipe Medina L., John Edward Salazar D., Nicolás
I CONGRESO VIRTUAL DE MICROCONTROLADORES Y SUS APLICACIONES 1 Diseño e Implementación de un Sistema de Monitoreo Inalámbrico para Sistemas Embebidos Juan Felipe Medina L., John Edward Salazar D., Nicolás
Práctica 2 - Motores
 Práctica 2 - Motores INTRODUCCIÓN - Motores DC vs Servo motores Un motor de corriente directa cuenta con dos conexiones. La corriente eléctrica es proporcionada a través de estas conexiones, y por dentro
Práctica 2 - Motores INTRODUCCIÓN - Motores DC vs Servo motores Un motor de corriente directa cuenta con dos conexiones. La corriente eléctrica es proporcionada a través de estas conexiones, y por dentro
Como utilizar un servo motor con Arduino.
 Como utilizar un servo motor con Arduino. Revisión Diciembre 2009 Desarrollada por: Christopher Thompson cthompson@olimex.cl Revisada por: Paul Aguayo paguayo@olimex.cl 2 1 Introducción Arduino es una
Como utilizar un servo motor con Arduino. Revisión Diciembre 2009 Desarrollada por: Christopher Thompson cthompson@olimex.cl Revisada por: Paul Aguayo paguayo@olimex.cl 2 1 Introducción Arduino es una
VENTAJAS Y DESVENTAJAS DE LAS TECNOLOGIAS
 VENTAJAS Y DESVENTAJAS DE LAS TECNOLOGIAS EN NUESTRAS VIDAS JOCABED VALENZUELA GARCIA ESLI GUADALUPE LAZCANO RODRIGUEZ INTRODUCCION: Le tecnología es un sinónimo de innovación y de cosas nuevas para facilitar
VENTAJAS Y DESVENTAJAS DE LAS TECNOLOGIAS EN NUESTRAS VIDAS JOCABED VALENZUELA GARCIA ESLI GUADALUPE LAZCANO RODRIGUEZ INTRODUCCION: Le tecnología es un sinónimo de innovación y de cosas nuevas para facilitar
4 Teoría de diseño de Experimentos
 4 Teoría de diseño de Experimentos 4.1 Introducción En los capítulos anteriores se habló de PLC y de ruido, debido a la inquietud por saber si en una instalación eléctrica casera que cuente con el servicio
4 Teoría de diseño de Experimentos 4.1 Introducción En los capítulos anteriores se habló de PLC y de ruido, debido a la inquietud por saber si en una instalación eléctrica casera que cuente con el servicio
5. Solución de Problemas
 FLUID COMPONENTS INTL 5. Solución de Problemas Cuidado: Solo personal calificado debe intentar probar este instrumento. El operador asume toda la responsabilidad de emplear las practicas seguras mientras
FLUID COMPONENTS INTL 5. Solución de Problemas Cuidado: Solo personal calificado debe intentar probar este instrumento. El operador asume toda la responsabilidad de emplear las practicas seguras mientras
Control de acceso Access-800B
 Control de acceso Access-800B 1 Debido al crecimiento tan acelerado de la tecnología y particularmente en el campo de las comunicaciones, se pensó en aprovechar todos estos recursos ahora al alcance de
Control de acceso Access-800B 1 Debido al crecimiento tan acelerado de la tecnología y particularmente en el campo de las comunicaciones, se pensó en aprovechar todos estos recursos ahora al alcance de
Unidad 5 Utilización de Excel para la solución de problemas de programación lineal
 Unidad 5 Utilización de Excel para la solución de problemas de programación lineal La solución del modelo de programación lineal (pl) es una adaptación de los métodos matriciales ya que el modelo tiene
Unidad 5 Utilización de Excel para la solución de problemas de programación lineal La solución del modelo de programación lineal (pl) es una adaptación de los métodos matriciales ya que el modelo tiene
PROGRAMACION LADDER PLC BASICA. Descripción del lenguaje ladder
 PROGRAMACION LADDER PLC BASICA Descripción del lenguaje ladder Existen distintos tipos de lenguaje de programación de un PLC, quizás el más común sea la programación tipo escalera o ladder. Los diagramas
PROGRAMACION LADDER PLC BASICA Descripción del lenguaje ladder Existen distintos tipos de lenguaje de programación de un PLC, quizás el más común sea la programación tipo escalera o ladder. Los diagramas
Tema 1: Fundamentos de lógica, teoría de conjuntos y estructuras algebraicas: Apéndice
 Tema 1: Fundamentos de lógica, teoría de conjuntos y estructuras algebraicas: Apéndice 1 Polinomios Dedicaremos este apartado al repaso de los polinomios. Se define R[x] ={a 0 + a 1 x + a 2 x 2 +... +
Tema 1: Fundamentos de lógica, teoría de conjuntos y estructuras algebraicas: Apéndice 1 Polinomios Dedicaremos este apartado al repaso de los polinomios. Se define R[x] ={a 0 + a 1 x + a 2 x 2 +... +
Unidad Orientativa (Electrónica) Amplificadores Operacionales
 Amplificadores Operacionales") Unidad Orientativa (Electrónica) 1 Amplificadores Operacionales Índice Temático 2 1. Que son los amplificadores operacionales? 2. Conociendo a los Amp. Op. 3. Parámetros Principales. 4. Circuitos Básicos
Unidad Orientativa (Electrónica) 1 Amplificadores Operacionales Índice Temático 2 1. Que son los amplificadores operacionales? 2. Conociendo a los Amp. Op. 3. Parámetros Principales. 4. Circuitos Básicos
GUÍA RÁPIDA DE TRABAJOS CON ARCHIVOS.
 GUÍA RÁPIDA DE TRABAJOS CON ARCHIVOS. 1 Direcciones o Ubicaciones, Carpetas y Archivos Botones de navegación. El botón Atrás permite volver a carpetas que hemos examinado anteriormente. El botón Arriba
GUÍA RÁPIDA DE TRABAJOS CON ARCHIVOS. 1 Direcciones o Ubicaciones, Carpetas y Archivos Botones de navegación. El botón Atrás permite volver a carpetas que hemos examinado anteriormente. El botón Arriba
DESCRIPCIÓN DEL RETO SECUNDARIA (HIGH SCHOOL) WRO BOLIVIA
 WRO BOLIVIA") WRO BOLIVIA Olimpiada Mundial de Robótica WRO WRO (World Robot Olympiad) 2016 Categoría Regular Secundaria (High School) RETO: CLASIFICACION DE BASURA (WASTE SORTING) Introducción El reto es construir
WRO BOLIVIA Olimpiada Mundial de Robótica WRO WRO (World Robot Olympiad) 2016 Categoría Regular Secundaria (High School) RETO: CLASIFICACION DE BASURA (WASTE SORTING) Introducción El reto es construir
PROGRAMACIÓN ORIENTADA A OBJETOS
 PROGRAMACIÓN ORIENTADA A OBJETOS Clase 1. Introducción Profesor: Diego Sánchez Gómez Introducción a la programación orientada a objetos 1. Introducción a la programación orientada a objetos 2. Las clases
PROGRAMACIÓN ORIENTADA A OBJETOS Clase 1. Introducción Profesor: Diego Sánchez Gómez Introducción a la programación orientada a objetos 1. Introducción a la programación orientada a objetos 2. Las clases
ELECTRICIDAD. (Ejercicios resueltos) Alumno: Curso: Año:
 Alumno: Curso: Año:") (Ejercicios resueltos) Alumno: Curso: Año: La Ley de Ohm La Ley de Ohm dice que la intensidad de corriente que circula a través de un conductor es directamente proporcional a la diferencia de potencial
(Ejercicios resueltos) Alumno: Curso: Año: La Ley de Ohm La Ley de Ohm dice que la intensidad de corriente que circula a través de un conductor es directamente proporcional a la diferencia de potencial