AUTOMATISMOS Y ROBÓTICA
|
|
|
- Ángel Henríquez Álvarez
- hace 8 años
- Vistas:
Transcripción


1 TEMA 6 AUTOMATISMOS Y ROBÓTICA TECNOLOGÍA 4º ESO Samuel Escudero Melendo



2 Puffing Billy, H.C. Booth (1901) Robot aspiradora (actualidad) Whirlwind, McGaffey (1868)
3 QUÉ VEREMOS? APROXIMACIÓN HISTORICA ELEMENTOS DE UN AUTOMATISMO ARQUITECTURA DE UN ROBOT SENSORES ELÉCTRICOS SISTEMAS DE CONTROL

4 APROXIMACIÓN HISTÓRICA.

5 APROXIMACIÓN HISTÓRICA REVOLUCIÓN INDUSTRIAL, s.xviii-s.xix

6 APROXIMACIÓN HISTÓRICA MÁQUINA BOMB, CÓDIGO ENIGMA. ALAN TURING, II Guerra Mundial

7 APROXIMACIÓN HISTÓRICA MÁQUINA BOMB, CÓDIGO ENIGMA. ALAN TURING, II Guerra Mundial



8 APROXIMACIÓN HISTÓRICA
9 APROXIMACIÓN HISTÓRICA

10 APROXIMACIÓN HISTÓRICA

11 APROXIMACIÓN HISTÓRICA AUTÓMATAS

12 APROXIMACIÓN HISTÓRICA
13 APROXIMACIÓN HISTÓRICA


14 APROXIMACIÓN HISTÓRICA ROBOTS HUMANOIDES O ANDROIDES ROBOTS ROBOTS INDUSTRIALES BOTS (ROBOTS SOFTWARE)
15 APROXIMACIÓN HISTÓRICA PRIMERA GENERACIÓN ROBOTS MANIPULADORES SEGUNDA GENERACIÓN ROBOTS DE APRENDIZAJE TERCERA GENERACIÓN ROBOTS CON CONTROL SENSORIZADO CUARTA GENERACIÓN ROBOTS INTELIGENTES

16 APROXIMACIÓN HISTÓRICA 1ª GENERACIÓN ROBOTS MANIPULADORES GENERACIONES Década de los 50. Dispositivos mecánicos con un sistema de control sencillo, que sólo pueden realizar las tareas para las que se les ha programado previamente.

17 APROXIMACIÓN HISTÓRICA 2ª GENERACIÓN ROBOTS DE APRENDIZAJE GENERACIONES Década de los 70. Incorporan sensores y sistemas de control que les permite adaptar la tarea a las condiciones del entorno.

18 APROXIMACIÓN HISTÓRICA 3ª GENERACIÓN ROBOTS CON CONTROL SENSORIZADO GENERACIONES Décadas de los 80 y 90. Incorporan sistemas de control computerizado, aumentando la precisión de sensores y actuadores. Se desarrollan lenguajes de programación propios.

19 APROXIMACIÓN HISTÓRICA 4ª GENERACIÓN ROBOTS INTELIGENTES GENERACIONES A partir del Incorporan mejoras en hardware, sensores más complejos. Principios de la inteligencia artificial para el tratamiento de datos.

20 APROXIMACIÓN HISTÓRICA GENERACIONES

21 APROXIMACIÓN HISTÓRICA 5ª GENERACIÓN? ROBOTS CONDUCTUALES GENERACIONES Se pretende que los robots sean capaces de aprender y generar por sí mismos respuestas concretas a estímulos nuevos, pudiendo habitar en el mundo real y no en un mundo simplificado. Arquitectura de subsunción.

22 ELEMENTOS DE UN AUTOMATISMO.
23 ELEMENTOS DE UN AUTOMATISMO PERIFÉRICOS DE ENTRADA PERIFÉRICOS DE SALIDA ELEMENTOS DE CONTROL

24 ELEMENTOS DE UN AUTOMATISMO PERIFÉRICOS DE ENTRADA Mediante señales eléctricas proporciona al sistema la información que necesita del exterior para su funcionamiento adecuado. Estos dispositivos se denominan SENSORES.

25 ELEMENTOS DE UN AUTOMATISMO PERIFÉRICOS DE SALIDA Son dispositivos que realizan tareas concretas bajo el control del sistema. Ejemplos son, entre otros, los motores, lámparas y zumbadores.
26 ELEMENTOS DE UN AUTOMATISMO SISTEMA DE CONTROL Reciben las señales de naturaleza eléctrica que proporcionan los periféricos de entrada y, en función de la información recibida, hace funcionar de un modo u otro los periféricos de salida.

27 ARQUITECTURA DE UN ROBOT.
28 ARQUITECTURA DE UN ROBOT ESTRUCTURA MECÁNICA ACTUADORES HERRAMIENTAS SENSORES SISTEMA DE CONTROL FUENTE DE ENERGÍA
29 ARQUITECTURA DE UN ROBOT ESTRUCTURA MECÁNICA Conjunto de elementos sobre los que van montados el resto de los componentes. La estructura debe ser robusta y estable para mantener el equilibrio del robot y no restar precisión a sus movimientos.



30 ARQUITECTURA DE UN ROBOT ACTUADORES Son los encargados de mover las partes articuladas. Pueden ser eléctricos, neumáticos o hidráulicos.
31 ARQUITECTURA DE UN ROBOT HERRAMIENTAS Son los elementos que incorporamos a los robots que realizan tareas de montaje y manipulación. Las herramientas son muy diversas dependiendo del tipo de robot y suelen admitir el intercambio.


32 ARQUITECTURA DE UN ROBOT SENSORES Son los dispositivos encargados de recoger la información del entorno y transmitirla al sistema de control para que la procese y actúe en consecuencia. Pueden ser EXTERNOS o INTERNOS.

33 ARQUITECTURA DE UN ROBOT SISTEMA DE CONTROL Su función es recibir la información de los sensores, analizarla y ajustar de forma constante el funcionamiento del robot al programa.

34 ARQUITECTURA DE UN ROBOT FUENTE DE ENERGÍA Su función es alimentar a los actuadores, herramientas, sensores y sistemas de control del robot. Para evitar interferencias, la alimentación de los motores suele ir separada del resto.
35 TIPOS DE ROBOT ARQUITECTURA DE UN ROBOT SEGÚN EL TIPO DE ARTICULACIONES SEGÚN SU MOVILIDAD SEGÚN SU MORFOLOGÍA

36 ARQUITECTURA DE UN ROBOT SEGÚN EL TIPO DE ARTICULACIONES TIPOS DE ROBOT
37 ARQUITECTURA DE UN ROBOT SEGÚN EL TIPO DE ARTICULACIONES TIPOS DE ROBOT Grados de libertad: número de movimientos independientes que puede realizar una articulación.


38 ARQUITECTURA DE UN ROBOT SEGÚN SU MOVILIDAD TIPOS DE ROBOT ESTÁTICO VS MÓVIL


39 ARQUITECTURA DE UN ROBOT SEGÚN SU MORFOLOGÍA TIPOS DE ROBOT ZOOMÓRFICOS ANTROPOMÓRFICOS HÍBRIDOS
40 EJERCICIOS 1. Elabora una lista de las distintas máquinas, automatismos y robots que es posible encontrar y utilizar de forma cotidiana. 2. Busca un ejemplo de robot real de cada una de las generaciones. Anota los datos más relevantes: empresa fabricante, aplicaciones TRABAJO INDIVIDUAL


41 EJERCICIOS 3. Busca 3 campos de aplicación actual de la robótica y explica qué función desempeñan en cada caso los robots y las ventajas que su uso supone. TRABAJO INDIVIDUAL
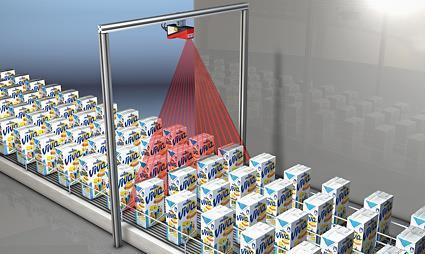
42 SENSORES ELÉCTRICOS.
43 SENSORES ELÉCTRICOS LOS SENSORES COMUNICAN EL ROBOT CON EL ENTORNO. El SENSOR transforma la energía captada tomando datos en una magnitud física o química y emite una señal de salida.
44 TIPOS DE SENSORES SENSORES ELÉCTRICOS Según la SEÑAL Según RANGO DE VALORES Según su FUNCIONAMIENTO ANALÓGICOS DIGITALES CIERRE DE CONTACTO PROPORCIONALES MECÁNICOS ELÉCTRICOS MAGNÉTICOS ÓPTICOS LÁSER ACÚSTICOS ULTRASÓNICOS PIRÓMETROS DE RADIACIÓN
45 SENSORES ELÉCTRICOS SEGÚN EL TIPO DE SEÑAL QUE GENERAN SENSOR DE PROXIMIDAD ANALÓGICO La señal varía a lo largo del tiempo dentro de un rango de valores conocido SENSOR FINAL DE CARRERA DIGITAL Produce señales que sólo toman dos posibles valores, generalmente 0V y 5V

46 SENSORES ELÉCTRICOS SEGÚN EL RANGO DE VALORES QUE DEVUELVEN SENSOR FINAL DE CARRERA CIERRE DE CONTACTO Sensores binarios que devuelven valores de encendido o apagado SENSOR DE PROXIMIDAD PROPORCIONALES Producen una señal proporcional al valor que están midiendo

47 SENSORES ELÉCTRICOS SEGÚN EL RANGO DE VALORES QUE DEVUELVEN FUNCIONAMIENTO DE UN DISPOSITIVO DE FINAL DE CARRERA

48 SENSORES ELÉCTRICOS SEGÚN SU FUNCIONAMIENTO SENSOR DE TEMPERATURA SENSOR FINAL DE CARRERA MECÁNICO Generan un cierre de contacto ELÉCTRICO Transforman la magnitud eléctrica medida en una señal eléctrica


49 SENSORES ELÉCTRICOS SEGÚN SU FUNCIONAMIENTO SENSOR OPTOACOPLADOR ÓPTICO Constan de un emisor de luz y de un receptor y permiten medir distancias, detectar objetos LASER SENSOR DE DISTANCIA Sensor óptico que trabaja con luz láser, permitiendo llegar a mayor distancia

 en una señal eléctrica")

50 SENSORES ELÉCTRICOS SEGÚN SU FUNCIONAMIENTO SENSOR ULTRASÓNICO MICRÓFONO ELECTRET ACÚSTICOS Transforman el sonido (cambios en la presión del aire alrededor del sensor) en una señal eléctrica ULTRASÓNICOS Constan de un transmisor y de un receptor de ultrasonidos. Mide distancias y detecta objetos


51 SENSORES ELÉCTRICOS SEGÚN SU FUNCIONAMIENTO SENSOR MAGNÉTICO MAGNÉTICO Miden campos magnéticos y permiten determinar la posición relativa de dos objetos PIRÓMETRO DE Tª PIRÓMETROS DE RADIACIÓN Miden altas temperaturas por detección del color de una llama

52 SENSORES ELÉCTRICOS SEGÚN SU FUNCIONAMIENTO FUNCIONAMIENTO DE UN SENSOR ULTRASÓNICO

53 SISTEMAS DE CONTROL.
54 SISTEMAS DE CONTROL La función del SISTEMA DE CONTROL es recibir la información de los sensores, analizarla y ajustar de forma constante el funcionamiento del robot al programa.
55 SISTEMAS DE CONTROL ENTRADA SISTEMA SALIDA PERTURBACIONES
56 SISTEMAS DE CONTROL ENTRADA Conjunto de variables que afectan al sistema SISTEMA SALIDA Resultados esperados del sistema PERTURBACIONES Conjunto de variables ajenas al sistema
57 SISTEMAS DE CONTROL TIPOS SISTEMA LAZO ABIERTO VS SISTEMA LAZO CERRADO
58 SISTEMA DE LAZO ABIERTO SISTEMAS DE CONTROL TIPOS
59 SISTEMA DE LAZO ABIERTO SISTEMAS DE CONTROL TIPOS No se compara la salida con el valor deseado o señal de referencia. La señal de referencia establece unas condiciones prefijadas de la operación que permanecen invariables a lo largo del proceso. La precisión de la salida depende de un correcto ajuste del controlador. Si se producen perturbaciones el sistema no cumple su función.
60 SISTEMAS DE CONTROL TIPOS: SISTEMA DE LAZO ABIERTO 1. INTRODUCIR TOSTADA 2. PROGRAMAR TIEMPO 3. TOSTADO DEL PAN 4. DESCONEXIÓN DEL TOSTADOR CONTROLADOR El tostador no tiene forma de detectar si el pan se ha quemado o no con el tiempo que hemos programado
61 SISTEMA DE LAZO CERRADO SISTEMAS DE CONTROL TIPOS
62 SISTEMA DE LAZO CERRADO SISTEMAS DE CONTROL TIPOS El proceso que lleva a cabo el sistema es constantemente ajustado por medio de una señal de control (esta señal es resultado de la comparación entre la señal de referencia y la lectura en tiempo real de un sensor a la salida del sistema). Son más precisos que los sistemas de lazo abierto. Menos sensibles a las perturbaciones externas. Son más complejos, caros y propensos a averías que los sistemas de lazo abierto.
 PERTURBACIÓN 5. DETECTA VARIACIÓN DE T a 6. GENERA MÁS FRÍO SEÑAL DE CONTROL 7.")
63 SISTEMAS DE CONTROL TIPOS: SISTEMA DE LAZO CERRADO 1. TENEMOS CALOR 2. PROGRAMAMOS 18 o C CONTROLADOR 3. BAJA LA T a 4. ABRIMOS VENTANA ( SUBE T a ) PERTURBACIÓN 5. DETECTA VARIACIÓN DE T a 6. GENERA MÁS FRÍO SEÑAL DE CONTROL 7. ALCANZAMOS 18 o C
TEMA 5 CONTROL Y ROBÓTICA TECNOLOGÍA 3º ESO. Samuel Escudero Melendo
 TEMA 5 CONTROL Y ROBÓTICA TECNOLOGÍA 3º ESO Samuel Escudero Melendo Puffing Billy, H.C. Booth (1901) Robot aspiradora (actualidad) Whirlwind, McGaffey (1868) QUÉ VEREMOS? APROXIMACIÓN HISTORICA ARQUITECTURA
TEMA 5 CONTROL Y ROBÓTICA TECNOLOGÍA 3º ESO Samuel Escudero Melendo Puffing Billy, H.C. Booth (1901) Robot aspiradora (actualidad) Whirlwind, McGaffey (1868) QUÉ VEREMOS? APROXIMACIÓN HISTORICA ARQUITECTURA
Robótica. Un robot...
 Robótica Un robot... La palabra robot está a la orden del día y muchas veces al escucharla nos imaginamos una máquina con forma humana que camina, habla, gesticula pero en realidad es algo mucho más sencillo.
Robótica Un robot... La palabra robot está a la orden del día y muchas veces al escucharla nos imaginamos una máquina con forma humana que camina, habla, gesticula pero en realidad es algo mucho más sencillo.
Maquinas: sistemas de control. Tecnología 3 ESO
 Maquinas: sistemas de control Tecnología 3 ESO La necesidad de controlar La necesidad de controlar La necesidad de controlar Los agricultores necesitan controlar un proceso de riego. Cuando encender el
Maquinas: sistemas de control Tecnología 3 ESO La necesidad de controlar La necesidad de controlar La necesidad de controlar Los agricultores necesitan controlar un proceso de riego. Cuando encender el
TEMA 12: SISTEMAS AUTOMÁTICOS Y DE CONTROL
 TEMA 12: SISTEMAS AUTOMÁTICOS Y DE CONTROL 1.-INTRODUCCIÓN: Un sistema de control es un conjunto de componentes físicos conectados o relacionados entre sí, de manera que regulen o dirijan una acción por
TEMA 12: SISTEMAS AUTOMÁTICOS Y DE CONTROL 1.-INTRODUCCIÓN: Un sistema de control es un conjunto de componentes físicos conectados o relacionados entre sí, de manera que regulen o dirijan una acción por
Dr. D. José Manuel Palomares. LEGO Mindstorms NXT. Introducción a la Robótica
 LEGO Mindstorms NXT 1 Robots Qué es un robot? Una máquina capaz de realizar tareas autónomas de interacción con algún determinado entorno físico. De manera análoga, se utiliza bots para referirse a programas
LEGO Mindstorms NXT 1 Robots Qué es un robot? Una máquina capaz de realizar tareas autónomas de interacción con algún determinado entorno físico. De manera análoga, se utiliza bots para referirse a programas
TICA EN LA ESCUELA. El Robot (hardware) Alicia Escudero. Apellido y Nombre: Escudero Alicia. Tema: características de un robot
 Alicia Escudero. Apellido y Nombre: Escudero Alicia. Tema: características de un robot") Alicia Escudero ROBÓTICA TICA EN LA ESCUELA El Robot (hardware) Apellido y Nombre: Escudero Alicia Tema: características de un robot E-mail: [email protected] D.N.I: 36.491.199 02/05/1994 Introducción
Alicia Escudero ROBÓTICA TICA EN LA ESCUELA El Robot (hardware) Apellido y Nombre: Escudero Alicia Tema: características de un robot E-mail: [email protected] D.N.I: 36.491.199 02/05/1994 Introducción
IES MACIA ABELA DEPARTAMENTO DE TECNOLOGÍA
 1. Evolución de las formas de trabajo. CONTROL Y ROBÓTICA Durante milenios el hombre ha creado herramientas, que con un largo proceso de perfeccionamiento se han ido modificando hasta obtener herramientas
1. Evolución de las formas de trabajo. CONTROL Y ROBÓTICA Durante milenios el hombre ha creado herramientas, que con un largo proceso de perfeccionamiento se han ido modificando hasta obtener herramientas
Introducción a la Automatización Industrial
 a la Automatización Industrial UPCO ICAI Departamento de Eletrónica y Automática 1 Qué es automatizar? PLANTA Agitador Conseguir que la PLANTA funcione de forma automática Reactivo ácido Reactivo alcalino
a la Automatización Industrial UPCO ICAI Departamento de Eletrónica y Automática 1 Qué es automatizar? PLANTA Agitador Conseguir que la PLANTA funcione de forma automática Reactivo ácido Reactivo alcalino
DEFINICIONES Y CONCEPTOS (SISTEMAS DE PERCEPCIÓN - DTE) Curso
 Curso") DEFINICIONES Y CONCEPTOS (SISTEMAS DE PERCEPCIÓN - DTE) Curso 2009-10 1. Generalidades Instrumentación: En general la instrumentación comprende todas las técnicas, equipos y metodología relacionados con
DEFINICIONES Y CONCEPTOS (SISTEMAS DE PERCEPCIÓN - DTE) Curso 2009-10 1. Generalidades Instrumentación: En general la instrumentación comprende todas las técnicas, equipos y metodología relacionados con
Robótica Mecanización, Automatización y Robotización Robótica y robots... 3
 Robótica... 2 Mecanización, Automatización y Robotización... 2 Robótica y robots... 3 Definiciones de robot... 3 Funcionamiento de un robot... 4 Entradas o Sensores... 5 Salidas o actuadores... 6 Realimentación...
Robótica... 2 Mecanización, Automatización y Robotización... 2 Robótica y robots... 3 Definiciones de robot... 3 Funcionamiento de un robot... 4 Entradas o Sensores... 5 Salidas o actuadores... 6 Realimentación...
Montaje y Mantenimiento de Sistemas de Automatización Industrial
 Tfno: 956 074 222/655 617 059 Fax: 956 922 482 Montaje y Mantenimiento de Sistemas de Automatización Industrial Duración: 80 horas Modalidad: Online Coste Bonificable: 600 Objetivos del curso En el ámbito
Tfno: 956 074 222/655 617 059 Fax: 956 922 482 Montaje y Mantenimiento de Sistemas de Automatización Industrial Duración: 80 horas Modalidad: Online Coste Bonificable: 600 Objetivos del curso En el ámbito
TECNOLOGÍA EN ROBOTS DE ÚLTIMA GENERACIÓN, HUMANOIDES.
 TECNOLOGÍA EN ROBOTS DE ÚLTIMA GENERACIÓN, HUMANOIDES. Rafael López Bonillas. 14/03/2014. AGENDA ROBOTS HUMANOIDES Antecedentes Actualidad Futuro Antecedentes: Conceptos de robótica. Clasificación de robots.
TECNOLOGÍA EN ROBOTS DE ÚLTIMA GENERACIÓN, HUMANOIDES. Rafael López Bonillas. 14/03/2014. AGENDA ROBOTS HUMANOIDES Antecedentes Actualidad Futuro Antecedentes: Conceptos de robótica. Clasificación de robots.
TSTC. Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA
 Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
Dpt. Teoría de la Señal, Telemática y Comunicaciones Tema 1 INTRODUCCIÓN A LA ROBÓTICA Secciones 1. Introducción y definiciones. 2. Visión General de la manipulación mecánica. 1. Posicionamiento y Cinemática
I.P.N. CECyT Gonzalo Vázquez Vela BANCO DE 100 REACTIVOS DE LA DE SENSORES PARA ALUMNOS DE 5º SEMESTRE DE LA ESPECIALIDAD DE
 I.P.N. CECyT Gonzalo Vázquez Vela BANCO DE 100 REACTIVOS DE LA UNIDAD DE APRENDIZAJE DE SENSORES PARA ALUMNOS DE 5º SEMESTRE DE LA ESPECIALIDAD DE SISTEMAS DE CONTROL ELÉCTRICO SEMESTRE A 2010-2011 QUE
I.P.N. CECyT Gonzalo Vázquez Vela BANCO DE 100 REACTIVOS DE LA UNIDAD DE APRENDIZAJE DE SENSORES PARA ALUMNOS DE 5º SEMESTRE DE LA ESPECIALIDAD DE SISTEMAS DE CONTROL ELÉCTRICO SEMESTRE A 2010-2011 QUE
ELEMENTOS DE CONTROL Y SENSORES
 7 ELEMENTOS DE CONTROL Y SENSORES 7.1. Introducción Como se ha dicho en capítulos anteriores las principales señales de entrada al autómata son del tipo de pulsador, interruptor, termostatos, finales de
7 ELEMENTOS DE CONTROL Y SENSORES 7.1. Introducción Como se ha dicho en capítulos anteriores las principales señales de entrada al autómata son del tipo de pulsador, interruptor, termostatos, finales de
SENSORES Informan sobre el estado del proceso a controlar. ACTUADORES Cambian alguna variable que influye en el proceso
 SENSORES Informan sobre el estado del proceso a controlar ACTUADORES Cambian alguna variable que influye en el proceso CONTROLADOR Analiza las mediciones y elabora señales para los actuadores SENSORES
SENSORES Informan sobre el estado del proceso a controlar ACTUADORES Cambian alguna variable que influye en el proceso CONTROLADOR Analiza las mediciones y elabora señales para los actuadores SENSORES
Dpto. de Electrónica - Universidad de Alcalá TuBot
 Dpto. de Electrónica - Universidad de Alcalá TuBot 2014 1 TUBOT 2014 INTRODUCCIÓN Dpto. de Electrónica - Universidad de Alcalá TuBot 2014 2 Elementos de un Robot Móvil Autónomo SISTEMA DE ALIMENTACIÓN
Dpto. de Electrónica - Universidad de Alcalá TuBot 2014 1 TUBOT 2014 INTRODUCCIÓN Dpto. de Electrónica - Universidad de Alcalá TuBot 2014 2 Elementos de un Robot Móvil Autónomo SISTEMA DE ALIMENTACIÓN
1. Qué es un automatismo?
 1. Qué es un automatismo? - En electricidad se denomina automatismo al circuito que es capaz de realizar secuencias lógicas sin la intervención del hombre. - Se utilizan tanto en el sector industrial como
1. Qué es un automatismo? - En electricidad se denomina automatismo al circuito que es capaz de realizar secuencias lógicas sin la intervención del hombre. - Se utilizan tanto en el sector industrial como
SENSORES DE POSICIÓN. M.I Aurelio Hernández Rodríguez
 SENSORES DE POSICIÓN M.I Aurelio Hernández Rodríguez Los sensores son los sentidos de las máquinas. Algunos sensores reconocen metales, otros reaccionan al calor, al movimiento, A la luz o a los campos
SENSORES DE POSICIÓN M.I Aurelio Hernández Rodríguez Los sensores son los sentidos de las máquinas. Algunos sensores reconocen metales, otros reaccionan al calor, al movimiento, A la luz o a los campos
Anexo III: Lazo de corriente en instalaciones industriales. Tipos y modos de funcionamiento.
 Anexo III: Lazo de corriente en instalaciones industriales. Tipos y modos de funcionamiento. 1. Introducción Las señales analógicas en entornos industriales viene regulada por la norma ANSI/ISAS50.1-1982(R1992)
Anexo III: Lazo de corriente en instalaciones industriales. Tipos y modos de funcionamiento. 1. Introducción Las señales analógicas en entornos industriales viene regulada por la norma ANSI/ISAS50.1-1982(R1992)
SISTEMA DE CONTROL, ADQUISICIÓN DE DATOS DATOS Y SUPERVICIÓN DE EQUIPOS. Ingeniería en Control. John Edisson Mosquera Varón, Año, 2011
 SISTEMA DE CONTROL, ADQUISICIÓN DE DATOS Y SUPERVICIÓN DE EQUIPOS Ingeniería en Control John Edisson Mosquera Varón Seminario de Investigación Universidad Distrital Francisco José de Caldas Facultad Tecnológica
SISTEMA DE CONTROL, ADQUISICIÓN DE DATOS Y SUPERVICIÓN DE EQUIPOS Ingeniería en Control John Edisson Mosquera Varón Seminario de Investigación Universidad Distrital Francisco José de Caldas Facultad Tecnológica
PRINCIPIOS DE SISTEMAS DE CONTROL
 PRINCIPIOS DE SISTEMAS DE CONTROL DEFINICIÓN DE AUTOMATIZACIÓN La Real Academia de Ciencias Exactas Físicas y Naturales define la Automática como el estudio de los métodos y procedimientos cuya finalidad
PRINCIPIOS DE SISTEMAS DE CONTROL DEFINICIÓN DE AUTOMATIZACIÓN La Real Academia de Ciencias Exactas Físicas y Naturales define la Automática como el estudio de los métodos y procedimientos cuya finalidad
Lección 1 Automatización Industrial. Lección 2 Qué es el PLC?
 -1- Lección 1 Automatización Industrial Grado de automatización Accionamientos Controlador Lógico Programable Lección 2 Qué es el PLC? Sistemas de Control Sistemas de Control de Lazo Abierto Sistemas de
-1- Lección 1 Automatización Industrial Grado de automatización Accionamientos Controlador Lógico Programable Lección 2 Qué es el PLC? Sistemas de Control Sistemas de Control de Lazo Abierto Sistemas de
Programa de Tecnologías Educativas Avanzadas. Bach. Pablo Sanabria Campos
 Programa de Tecnologías Educativas Avanzadas Bach. Pablo Sanabria Campos Agenda Conceptos básicos. Relación entre corriente, tensión y resistencia. Conductores, aislantes y semiconductores. Elementos importantes
Programa de Tecnologías Educativas Avanzadas Bach. Pablo Sanabria Campos Agenda Conceptos básicos. Relación entre corriente, tensión y resistencia. Conductores, aislantes y semiconductores. Elementos importantes
CONTROL DE PROCESO. Control de procesos industriales CONEXIÓN CON EL PROCESO
 CONTROL DE PROCESO CONEXIÓN CON EL PROCESO La transformación de unas materias primas en un producto acabado se lleva a cabo mediante un proceso de fabricación (En adelante proceso). Todo proceso lleva
CONTROL DE PROCESO CONEXIÓN CON EL PROCESO La transformación de unas materias primas en un producto acabado se lleva a cabo mediante un proceso de fabricación (En adelante proceso). Todo proceso lleva
LABORATORIO DE INSTRUMENTACIÓN ELECTRÓNICA PRÁCTICA N 11
 ESCUELA POLITÉCNICA NACIONAL Campus Politécnico "J. Rubén Orellana R." FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control Carrera de Ingeniería Electrónica y Telecomunicaciones
ESCUELA POLITÉCNICA NACIONAL Campus Politécnico "J. Rubén Orellana R." FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control Carrera de Ingeniería Electrónica y Telecomunicaciones
Actuadores eléctricos - Motores
 Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
Sistema Integrador Ciencia y tecnología sensores
 Sistema Integrador Ciencia y tecnología sensores SENSORES Son dispositivo con la capacidad de detectar el alcance, la proximidad y el contacto de las diversas variables físicas de los objetos como energía,
Sistema Integrador Ciencia y tecnología sensores SENSORES Son dispositivo con la capacidad de detectar el alcance, la proximidad y el contacto de las diversas variables físicas de los objetos como energía,
DISPOSITIVOS DE SEGURIDAD Y CONTROL CENTRAL MOB-49. Central MOB-49
 Central MOB-49 Autómata de control domótico y seguridad compacto con 48 entradas y/o salidas programables como analógico ó digital + 1 entrada receptor de infrarrojos para mando a distancia universal.
Central MOB-49 Autómata de control domótico y seguridad compacto con 48 entradas y/o salidas programables como analógico ó digital + 1 entrada receptor de infrarrojos para mando a distancia universal.
Criterios de evaluación comunes (Ciclos Formativos)
") CRITERIOS DE EVALUACIÓN DEL DEPARTAMENTO DE CONFECCIÓN Y MODA MÓDULO DE PRINCIPIOS DE MANTENIMIENTO ELECTROMECÁNICO Criterios de evaluación comunes (Ciclos Formativos) 1. que el/la alumno/a sitúe lo estudiado
CRITERIOS DE EVALUACIÓN DEL DEPARTAMENTO DE CONFECCIÓN Y MODA MÓDULO DE PRINCIPIOS DE MANTENIMIENTO ELECTROMECÁNICO Criterios de evaluación comunes (Ciclos Formativos) 1. que el/la alumno/a sitúe lo estudiado
AUTOMATIZACIÓN INDUSTRIAL
 Departamento de Ingenieria de Sistemas y Automática AUTOMATIZACIÓN INDUSTRIAL 1 AUTOMATIZACION INDUSTRIAL 2 AUTOMATIZACION INDUSTRIAL 3 AUTOMATAS PROGRAMABLES Surgen de la necesidad de controlar automáticamente
Departamento de Ingenieria de Sistemas y Automática AUTOMATIZACIÓN INDUSTRIAL 1 AUTOMATIZACION INDUSTRIAL 2 AUTOMATIZACION INDUSTRIAL 3 AUTOMATAS PROGRAMABLES Surgen de la necesidad de controlar automáticamente
ESTUDIO DEL SISTEMA DE UN BRAZO ROBOT .INDICE. Descripción de las partes de la máquina..pag. 3, 4 y 5. *Introducción.
 ESTUDIO DEL SISTEMA DE UN BRAZO ROBOT.INDICE. Descripción de las partes de la máquina..pag. 3, 4 y 5. *Introducción. *Motor paso a paso (Bipolar): Características y funcionamiento. *Descripción de las
ESTUDIO DEL SISTEMA DE UN BRAZO ROBOT.INDICE. Descripción de las partes de la máquina..pag. 3, 4 y 5. *Introducción. *Motor paso a paso (Bipolar): Características y funcionamiento. *Descripción de las
ELECTRÓNICA II. M. Teresa Higuera Toledano (Dep. Arquitectura de Computadores y Automática) FdI 310
 FdI 310") ELECTRÓNICA II M. Teresa Higuera Toledano (Dep. Arquitectura de Computadores y Automática) FdI 310 Electrónica II 2009-2010 1 Que es la electrónica? La electrónica es el campo de la ingeniería y de la
ELECTRÓNICA II M. Teresa Higuera Toledano (Dep. Arquitectura de Computadores y Automática) FdI 310 Electrónica II 2009-2010 1 Que es la electrónica? La electrónica es el campo de la ingeniería y de la
CFGS Automatización y Robótica Industrial. Módulos profesionales implicados en el proyecto y horas de cada módulo que estarán en dual (en la empresa):
:") CFGS Automatización y Robótica Industrial Los datos de este proyecto, son datos reales extraídos de un proyecto ya en marcha. No contiene toda la información del proyecto sino un extracto del mismo. Módulos
CFGS Automatización y Robótica Industrial Los datos de este proyecto, son datos reales extraídos de un proyecto ya en marcha. No contiene toda la información del proyecto sino un extracto del mismo. Módulos
ITS-200 Innovative Training System
 ITS-200 Innovative Training System Desarrolle sus habilidades con la última tecnología industrial en sensórica y servoaccionamientos En las siguientes TECNOLOGÍAS... CUADROS ELÉCTRICOS NEUMÁTICA VACÍO
ITS-200 Innovative Training System Desarrolle sus habilidades con la última tecnología industrial en sensórica y servoaccionamientos En las siguientes TECNOLOGÍAS... CUADROS ELÉCTRICOS NEUMÁTICA VACÍO
Robótica con arduino
 Robótica con arduino El Club de Cacharreo El proyecto Club de Cacharreo trata de acercar las nuevas tecnologías en general y la robótica en particular a la sociedad y para ello se centra en los niños en
Robótica con arduino El Club de Cacharreo El proyecto Club de Cacharreo trata de acercar las nuevas tecnologías en general y la robótica en particular a la sociedad y para ello se centra en los niños en
1. Concepto de amplificación de señales en los circuitos de control Amplificadores estáticos Amplificadores magnéticos...
 Contenido 1. Concepto de amplificación de señales en los circuitos de control.... 2 2. Amplificadores estáticos.... 2 2.1. Amplificadores magnéticos... 2 2.2. Amplificadores electrónicos.... 3 3. Amplificadores
Contenido 1. Concepto de amplificación de señales en los circuitos de control.... 2 2. Amplificadores estáticos.... 2 2.1. Amplificadores magnéticos... 2 2.2. Amplificadores electrónicos.... 3 3. Amplificadores
Colegio Nacional de Educación Profesional Técnica. Conalep 246 Plantel Nuevo Laredo.
 Colegio Nacional de Educación Profesional Técnica. Conalep 246 Plantel Nuevo Laredo. Mantenimiento a Plantas Eléctricas de Emergencia. Parámetros de un Motor de combustión Interna y Alternador. Alumno:
Colegio Nacional de Educación Profesional Técnica. Conalep 246 Plantel Nuevo Laredo. Mantenimiento a Plantas Eléctricas de Emergencia. Parámetros de un Motor de combustión Interna y Alternador. Alumno:
Distinguir correctamente las ventajas y desventajas de la lógica cableada y de la lógica programada con PLC.
 Programas de Actividades Curriculares Plan 94A Carrera: Ingeniería Mecánica AUTOMATIZACIÓN INDUSTRIAL Área: Bloque: Eléctrica Tecnologías Básicas Nivel: 4º año Tipo: Electiva Modalidad: Anual Carga Horaria
Programas de Actividades Curriculares Plan 94A Carrera: Ingeniería Mecánica AUTOMATIZACIÓN INDUSTRIAL Área: Bloque: Eléctrica Tecnologías Básicas Nivel: 4º año Tipo: Electiva Modalidad: Anual Carga Horaria
Conocerá las formas de cableado para conectar dispositivos de entrada y salida de un PLC.
 PROYECTO 3 CONTROL DE ESPACIOS PARA UN ESTACIONAMIENTO DE 100 CAJONES Objetivos: Al completar esta práctica el alumno: Será capaz de configurar y utilizar el PLC, en diferentes automatismos. Manejara el
PROYECTO 3 CONTROL DE ESPACIOS PARA UN ESTACIONAMIENTO DE 100 CAJONES Objetivos: Al completar esta práctica el alumno: Será capaz de configurar y utilizar el PLC, en diferentes automatismos. Manejara el
FICHA DE CONSULTA DE EXCURSIÓN POR LA RED ELÉCTRICA
 FICHA DE CONSULTA Sumario 1. Glosario 1.1. Siglas 3 1.2. Términos 3 2. Qué es la domótica? 2.1. Servicios que nos ofrece la domótica 4 2.1.1. Gestión energética 4 2.1.2. Seguridad 5 2.1.3. Bienestar 5
FICHA DE CONSULTA Sumario 1. Glosario 1.1. Siglas 3 1.2. Términos 3 2. Qué es la domótica? 2.1. Servicios que nos ofrece la domótica 4 2.1.1. Gestión energética 4 2.1.2. Seguridad 5 2.1.3. Bienestar 5
Vigas Ruedas Planchas Ejes
 QUÉ ES MAKEBLOCK? Makeblock es un sistema de piezas intercambiables de gran resistencia que se pueden montar entre ellas fácilmente y con infinidad de combinaciones. Makeblock es accesible a pequeños (a
QUÉ ES MAKEBLOCK? Makeblock es un sistema de piezas intercambiables de gran resistencia que se pueden montar entre ellas fácilmente y con infinidad de combinaciones. Makeblock es accesible a pequeños (a
CONALEP 150 TEHUACÁN INSTALACIÓN DE SISTEMAS DE CIRCUITO CERRADO DE TELEVISIÓN PROYECTO FINAL DE MÓDULO
 CONALEP 150 TEHUACÁN INSTALACIÓN DE SISTEMAS DE CIRCUITO CERRADO DE TELEVISIÓN PROYECTO FINAL DE MÓDULO PLANTEAMIENTO INICIAL Proyecto práctico de aplicación para un Sistema CCTV con elementos de control
CONALEP 150 TEHUACÁN INSTALACIÓN DE SISTEMAS DE CIRCUITO CERRADO DE TELEVISIÓN PROYECTO FINAL DE MÓDULO PLANTEAMIENTO INICIAL Proyecto práctico de aplicación para un Sistema CCTV con elementos de control
Metodología de diseño de Sistemas de Control
 Metodología de diseño de Sistemas de Control Tema 2 1 Conocimiento del problema Explotación Definición de las especificaciones Test Metodología de diseño de Sistemas de Control...proceso iterativo Modelado
Metodología de diseño de Sistemas de Control Tema 2 1 Conocimiento del problema Explotación Definición de las especificaciones Test Metodología de diseño de Sistemas de Control...proceso iterativo Modelado
1 Características Ligera y compacta Deja un máximo espacio de suelo y pared para el mobiliario, la decoración y los accesorios.
 1 Características Ligera y compacta Deja un máximo espacio de suelo y pared para el mobiliario, la decoración y los accesorios. Se adapta perfectamente a cualquier decoración interior: sólo las rejillas
1 Características Ligera y compacta Deja un máximo espacio de suelo y pared para el mobiliario, la decoración y los accesorios. Se adapta perfectamente a cualquier decoración interior: sólo las rejillas
Educación Media Técnico-Profesional Sector Electricidad Especialidad: Electricidad Módulo SISTEMAS NEUMÁTICOS E HIDRÁULICOS
 Educación Media Técnico-Profesional Sector Electricidad Especialidad: Electricidad Módulo SISTEMAS NEUMÁTICOS E HIDRÁULICOS Introducción Este módulo está asociado al área de competencia Operar y mantener
Educación Media Técnico-Profesional Sector Electricidad Especialidad: Electricidad Módulo SISTEMAS NEUMÁTICOS E HIDRÁULICOS Introducción Este módulo está asociado al área de competencia Operar y mantener
Visión artificial y Robótica Sensores en robótica. Funcionamiento de cámaras. Depto. de Ciencia de la Computación e Inteligencia Artificial
 Visión artificial y Robótica Sensores en robótica. Funcionamiento de cámaras. Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Introducción Sensores de toque Sensores de posición
Visión artificial y Robótica Sensores en robótica. Funcionamiento de cámaras. Depto. de Ciencia de la Computación e Inteligencia Artificial Contenidos Introducción Sensores de toque Sensores de posición
PROGRAMA ANALÍTICO. Area: Educación Digital y Profesional Curso: 1 E y S Ciclo lectivo: 2016
 Contenidos clasificados en Unidades: Unidad Nº 1 La Producción de lo Artesanal a la Industrial. Procesos sobre insumos materiales: operaciones, flujos y productos. Los procesos como secuencias de operaciones
Contenidos clasificados en Unidades: Unidad Nº 1 La Producción de lo Artesanal a la Industrial. Procesos sobre insumos materiales: operaciones, flujos y productos. Los procesos como secuencias de operaciones
Sensor infrarrojo de movimiento PIR HC-SR501
 1 Sensor infrarrojo de movimiento PIR HC-SR501 Indice: 1. Principios de funcionamiento. 2. Descripción del HC-SR501. 3. Ajustes y configuración del sensor. 4. Pruebas preliminares del módulo HC-SR501.
1 Sensor infrarrojo de movimiento PIR HC-SR501 Indice: 1. Principios de funcionamiento. 2. Descripción del HC-SR501. 3. Ajustes y configuración del sensor. 4. Pruebas preliminares del módulo HC-SR501.
Contenido. Prefacio... Acerca de los autores...
 Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
Selección de un Robot Industrial. Prof. J. Milland
 Prof. J. Milland Si debemos robotizar un determinado proceso, debemos seleccionar el robot mas adecuado teniendo en consideración los servicios y el costo. Las características que debemos estar estudiando
Prof. J. Milland Si debemos robotizar un determinado proceso, debemos seleccionar el robot mas adecuado teniendo en consideración los servicios y el costo. Las características que debemos estar estudiando
Transductores y Actuadores de Uso Común
 Transductores y Actuadores de Uso Común Profesor: Ing. Andrés Felipe Suárez Sánchez Grupo de Investigación en Percepción y Sistemas Inteligentes. Email: andres.suarez @correounivalle.edu.co Tabla de Contenidos
Transductores y Actuadores de Uso Común Profesor: Ing. Andrés Felipe Suárez Sánchez Grupo de Investigación en Percepción y Sistemas Inteligentes. Email: andres.suarez @correounivalle.edu.co Tabla de Contenidos
LOS SISTEMAS ADAPTATIVOS
 0010100100100101010110010001 0101010001010100101000101 0010100011110010110010001 11111111111010100010101001010010100010101010101 0010100011110101010101011100101001001010101100100010010100011110101010001
0010100100100101010110010001 0101010001010100101000101 0010100011110010110010001 11111111111010100010101001010010100010101010101 0010100011110101010101011100101001001010101100100010010100011110101010001
Contenido 1. Elementos de un Sistema de Control... 2
 Contenido 1. Elementos de un Sistema de Control... 2 2. Transductores... 2 2.1. Transductores de posición.... 3 2.2. Transductores de proximidad... 4 2.3. Transductores de movimiento... 6... 6 2.4. Transductores
Contenido 1. Elementos de un Sistema de Control... 2 2. Transductores... 2 2.1. Transductores de posición.... 3 2.2. Transductores de proximidad... 4 2.3. Transductores de movimiento... 6... 6 2.4. Transductores
FAS-200 Sistema de ensamblaje flexible
 FAS-200 Sistema de ensamblaje flexible Nuevo sistema de ensamblaje flexible para la capacitación en mecatrónica y automatización Múltiples tecnologías en el mismo sistema En las siguientes TECNOLOGÍAS...
FAS-200 Sistema de ensamblaje flexible Nuevo sistema de ensamblaje flexible para la capacitación en mecatrónica y automatización Múltiples tecnologías en el mismo sistema En las siguientes TECNOLOGÍAS...
Detector de Mercurio por Fluorescencia Modelo 2500
 Detector de Mercurio por Fluorescencia Modelo 2500 El Modelo 2500 es un detector de mercurio elemental por Espectrometría de Fluorescencia Atómica de Vapor Frío (CVAFS). Las ventajas de la fluorescencia
Detector de Mercurio por Fluorescencia Modelo 2500 El Modelo 2500 es un detector de mercurio elemental por Espectrometría de Fluorescencia Atómica de Vapor Frío (CVAFS). Las ventajas de la fluorescencia
Cursos de Capacitación Técnica
 Cursos de Capacitación Técnica Hidráulica Neumática Índice HIB Hidráulica Básica 3 HIA Hidráulica Avanzada 4 TFH Tecnología de Filtración Hidráulica 5 IEH Introducción a la Electrohidráulica 6 NEB Neumática
Cursos de Capacitación Técnica Hidráulica Neumática Índice HIB Hidráulica Básica 3 HIA Hidráulica Avanzada 4 TFH Tecnología de Filtración Hidráulica 5 IEH Introducción a la Electrohidráulica 6 NEB Neumática
La principal particularidad de esta magnitud es lo amplitud del rango de medidas de interés para la ciencia y la ingeniería.
 Sensores de Distancia SENSORES DE DISTANCIA La principal particularidad de esta magnitud es lo amplitud del rango de medidas de interés para la ciencia y la ingeniería. Sensores de Distancia SENSORES DE
Sensores de Distancia SENSORES DE DISTANCIA La principal particularidad de esta magnitud es lo amplitud del rango de medidas de interés para la ciencia y la ingeniería. Sensores de Distancia SENSORES DE
Percepción. Universidad Autónoma de Guerrero Unidad Académica de Ingeniería. Introducción a la robótica Sesión 4: Percepción Eric Rodríguez Peralta
 Introducción a la robótica Sesión 4: Percepción Eric Rodríguez Peralta Ingeniería en computación Plan 2004 Percepción Sentidos y órganos humanos Una de las tareas más importantes de los sistemas autónomos
Introducción a la robótica Sesión 4: Percepción Eric Rodríguez Peralta Ingeniería en computación Plan 2004 Percepción Sentidos y órganos humanos Una de las tareas más importantes de los sistemas autónomos
9.3. Turbinas a gas y sus sistemas de regulación de velocidad. Los controles de arranque y parada, sólo toman el control en esas etapas.
 9.3. Turbinas a gas y sus sistemas de regulación de velocidad En las unidades con turbinas a gas las acciones de control son realizadas por 4 sistemas de control que compiten por el manejo de la válvula
9.3. Turbinas a gas y sus sistemas de regulación de velocidad En las unidades con turbinas a gas las acciones de control son realizadas por 4 sistemas de control que compiten por el manejo de la válvula
Interfaces. Carrera: SCF Participantes. Representantes de la academia de sistemas y computación de los Institutos Tecnológicos.
 1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Interfaces Ingeniería en Sistemas Computacionales SCF - 0417 2-4-8 2.- HISTORIA
1.- DATOS DE LA ASIGNATURA Nombre de la asignatura: Carrera: Clave de la asignatura: Horas teoría-horas práctica-créditos Interfaces Ingeniería en Sistemas Computacionales SCF - 0417 2-4-8 2.- HISTORIA
Programación de un Robot Móvil para reconocer pistas y objetos a distancia.
 Programación de un Robot Móvil para reconocer pistas y objetos a distancia. INTEGRANTES Abril Arriaza Natalia Bustamante Camila Carvajal Vicente Ponce Fecha de Realización de la Experiencia: Sebastian
Programación de un Robot Móvil para reconocer pistas y objetos a distancia. INTEGRANTES Abril Arriaza Natalia Bustamante Camila Carvajal Vicente Ponce Fecha de Realización de la Experiencia: Sebastian
Arquitectura del PLC. Dpto. Electrónica, Automática e Informática Industrial)
") Arquitectura del PLC Dpto. Electrónica, Automática e Informática Industrial) www.elai.upm.es Introducción (I) El PLC recibe, en tiempo real, la información de los sensores conectados al proceso y ejecuta
Arquitectura del PLC Dpto. Electrónica, Automática e Informática Industrial) www.elai.upm.es Introducción (I) El PLC recibe, en tiempo real, la información de los sensores conectados al proceso y ejecuta
ASIGNATURA: INFORMATICA INDUSTRIAL. Cód.: Régimen: Cuatrimestral Horas semanales: 4 horas Escuela: Sistemas 2010
 1 ASIGNATURA: INFORMATICA INDUSTRIAL. Cód.: 33-408 Régimen: Cuatrimestral Horas semanales: 4 horas Escuela: Sistemas 2010 FUNDAMENTOS: Nuestro país experimenta la creciente necesidad de conformar redes
1 ASIGNATURA: INFORMATICA INDUSTRIAL. Cód.: 33-408 Régimen: Cuatrimestral Horas semanales: 4 horas Escuela: Sistemas 2010 FUNDAMENTOS: Nuestro país experimenta la creciente necesidad de conformar redes
PROGRAMACION DE UN MODELO DE VEHICULO BASICO RASTREADOR
 Laboratorio ARQ232_ Métodos computaciones en arquitectura. PROGRAMACION DE UN MODELO DE VEHICULO BASICO RASTREADOR Equipo KANDINSKY Christian Alvial _ Joaquin Basso _Jonathan Martinez _Cybill Muñoz + Katherine
Laboratorio ARQ232_ Métodos computaciones en arquitectura. PROGRAMACION DE UN MODELO DE VEHICULO BASICO RASTREADOR Equipo KANDINSKY Christian Alvial _ Joaquin Basso _Jonathan Martinez _Cybill Muñoz + Katherine
2Procesos. Definición. Evolución. Clasificación. Control y automatización.
 AUTOATIZACIÓN Y CONTROL DE S INDUSTRIALES FIEE - UNAC VÍCTOR GUTIÉRREZ TOCAS 2Procesos. Definición. Evolución. Clasificación. y automatización. El sistema es un conjunto elementos, interrelacionados entre
AUTOATIZACIÓN Y CONTROL DE S INDUSTRIALES FIEE - UNAC VÍCTOR GUTIÉRREZ TOCAS 2Procesos. Definición. Evolución. Clasificación. y automatización. El sistema es un conjunto elementos, interrelacionados entre
Medida de magnitudes mecánicas
 Medida de magnitudes mecánicas Introducción Sensores potenciométricos Galgas extensiométricas Sensores piezoeléctricos Sensores capacitivos Sensores inductivos Sensores basados en efecto Hall Sensores
Medida de magnitudes mecánicas Introducción Sensores potenciométricos Galgas extensiométricas Sensores piezoeléctricos Sensores capacitivos Sensores inductivos Sensores basados en efecto Hall Sensores
Sensores compactos medidores de distancias de alta sensibilidad
 Sensores compactos medidores de distancias de alta sensibilidad Sección escrita y coordinada por: Fernando Remiro Modelo Introducción: Los IR Sharp GP2DXX son una familia de sensores de infrarrojos para
Sensores compactos medidores de distancias de alta sensibilidad Sección escrita y coordinada por: Fernando Remiro Modelo Introducción: Los IR Sharp GP2DXX son una familia de sensores de infrarrojos para
PRACTICA N 3 ADQUISICIÓN DE DATOS DE TEMPERATURA Y VELOCIDAD
 PRACTICA N 3 ADQUISICIÓN DE DATOS DE TEMPERATURA Y VELOCIDAD Fecha de entrega: 28 de septiembre Durante la realización de esta práctica el estudiante debe familiarizarse con el uso de dos tipos de sensores:
PRACTICA N 3 ADQUISICIÓN DE DATOS DE TEMPERATURA Y VELOCIDAD Fecha de entrega: 28 de septiembre Durante la realización de esta práctica el estudiante debe familiarizarse con el uso de dos tipos de sensores:
CONTROL DE PROCESOS QUÍMICOS
 UNIVERSIDAD NACIONAL EXPERIMENTAL POLITECNICA ANTONIO JOSÉ DE SUCRE VICERRECTORADO BARQUISIMETO DEPARTAMENTO DE INGENIERÍA QUÍMICA CONTROL DE PROCESOS QUÍMICOS Prof: Ing. (MSc). Juan Enrique Rodríguez
UNIVERSIDAD NACIONAL EXPERIMENTAL POLITECNICA ANTONIO JOSÉ DE SUCRE VICERRECTORADO BARQUISIMETO DEPARTAMENTO DE INGENIERÍA QUÍMICA CONTROL DE PROCESOS QUÍMICOS Prof: Ing. (MSc). Juan Enrique Rodríguez
SISTEMA DE CLIMATIZACIÓN RADIANTE SISTEMA REMOTO DE REGULACIÓN AMBIENTE ALB VÍA RADIO BASE DE CONEXIONES INALÁMBRICAS ALB. 1.
 SISTEMA REMOTO DE REGULACIÓN AMBIENTE ALB VÍA RADIO BASE DE CONEXIONES INALÁMBRICAS ALB 1. Descripción La base de conexiones ALB puede controlar completamente un sistema de suelo radiante de forma inalámbrica.
SISTEMA REMOTO DE REGULACIÓN AMBIENTE ALB VÍA RADIO BASE DE CONEXIONES INALÁMBRICAS ALB 1. Descripción La base de conexiones ALB puede controlar completamente un sistema de suelo radiante de forma inalámbrica.
INFORME DESCRIPTIVO. Introducción
 INFORME DESCRIPTIVO Introducción En la actualidad, el mundo de las nuevas tecnologías juega un papel muy importante, creciendo día a día y ayudándonos de esta manera a que nuestra vida sea lo más cómoda
INFORME DESCRIPTIVO Introducción En la actualidad, el mundo de las nuevas tecnologías juega un papel muy importante, creciendo día a día y ayudándonos de esta manera a que nuestra vida sea lo más cómoda
Midi y Audio Digital. Qué es el MIDI?
 Midi y Audio Digital Informática Musical y Multimedia II Qué es el MIDI? MIDI es el acrónimo de Musical Intruments Digital Interface (Interfaz digital para instrumentos musicales) Es un protocolo de comunicación
Midi y Audio Digital Informática Musical y Multimedia II Qué es el MIDI? MIDI es el acrónimo de Musical Intruments Digital Interface (Interfaz digital para instrumentos musicales) Es un protocolo de comunicación
Pruebas de Acceso a la Universidad. Criterios de Corrección. Los criterios generales de corrección de los exámenes serán los siguientes:
 Pruebas de Acceso a la Universidad Criterios de Corrección. Materias: - Tecnología Industrial II - Electrotecnia Los criterios generales de corrección de los exámenes serán los siguientes: 1.- El correcto
Pruebas de Acceso a la Universidad Criterios de Corrección. Materias: - Tecnología Industrial II - Electrotecnia Los criterios generales de corrección de los exámenes serán los siguientes: 1.- El correcto
Sistemas Electrónicos Especialidad del Grado de Ingeniería de Tecnologías de Telecomunicación
 Especialidad del Grado de Ingeniería de Tecnologías de Telecomunicación Charlas Informativas sobre las Especialidades de los Grados E.T.S.I.I.T. Jesús Banqueri Ozáez Departamento de Electrónica y Tecnología
Especialidad del Grado de Ingeniería de Tecnologías de Telecomunicación Charlas Informativas sobre las Especialidades de los Grados E.T.S.I.I.T. Jesús Banqueri Ozáez Departamento de Electrónica y Tecnología
B 1.- Lee el texto y a continuación responde la pregunta (10 min)
") B 1.- Lee el texto y a continuación responde la pregunta (10 min) TIPOS DE TRANSDUCTORES a) Posición, proximidad o presencia - Finales de carrera mecánicos (Posición) - Detectores de proximidad: 1. Inductivos:
B 1.- Lee el texto y a continuación responde la pregunta (10 min) TIPOS DE TRANSDUCTORES a) Posición, proximidad o presencia - Finales de carrera mecánicos (Posición) - Detectores de proximidad: 1. Inductivos:
EL ORDENADOR COMO DISPOSITIVO DE CONTROL
 EL ORDENADOR COMO DISPOSITIVO DE CONTROL 1.- INFORMACIÓN Y CONTROL Un sistema de control de procesos se puede definir como el conjunto de funciones y operaciones necesarias para conseguir un resultado
EL ORDENADOR COMO DISPOSITIVO DE CONTROL 1.- INFORMACIÓN Y CONTROL Un sistema de control de procesos se puede definir como el conjunto de funciones y operaciones necesarias para conseguir un resultado
INSTALACIONES AUTOMATIZADAS EN VIVIENDAS Y EDIFICIOS
 GUÍA DIDÁCTICA BOE 21 de febrero de 1.996 MÓDULO 3 INSTALACIONES AUTOMATIZADAS EN VIVIENDAS Y EDIFICIOS EQUIPOS E INSTALACIONES ELECTROTÉCNICAS AUTORES: José Moreno Gil Elías Rodríguez Diéguez David Lasso
GUÍA DIDÁCTICA BOE 21 de febrero de 1.996 MÓDULO 3 INSTALACIONES AUTOMATIZADAS EN VIVIENDAS Y EDIFICIOS EQUIPOS E INSTALACIONES ELECTROTÉCNICAS AUTORES: José Moreno Gil Elías Rodríguez Diéguez David Lasso
1-Componentes Físicos y Lógicos de un Ordenador.
 1-Componentes Físicos y Lógicos de un Ordenador. En este capítulo trataremos de explicar el conjunto de elementos por lo que está compuesto un ordenador. A grandes rasgos un Ordenador Personal o PC ( Personal
1-Componentes Físicos y Lógicos de un Ordenador. En este capítulo trataremos de explicar el conjunto de elementos por lo que está compuesto un ordenador. A grandes rasgos un Ordenador Personal o PC ( Personal
UNIDAD: CONTROL Y ROBÓTICA CURSO: 4º E.S.O.
 UNIDAD: CONTROL Y ROBÓTICA CURSO: 4º E.S.O. RELACIÓN DE ACTIVIDADES 1.- Qué es un robot? Cuándo comenzaron a utilizarse los robots industriales y dónde? 2.- Cuál es el origen de la palabra robot? 3.- Por
UNIDAD: CONTROL Y ROBÓTICA CURSO: 4º E.S.O. RELACIÓN DE ACTIVIDADES 1.- Qué es un robot? Cuándo comenzaron a utilizarse los robots industriales y dónde? 2.- Cuál es el origen de la palabra robot? 3.- Por
Tecnomatic-Systems.com
 CONTROLADOR: PKD1.7K GUÍA DEL USUARIO Tecnomatic-Systems.com CONTROLADOR: PKD1.7K Para el Operador 24VDC (voltios de corriente continua) de Puerta Abatible ADVERTENCIAS: Antes de realizar cualquier manipulación
CONTROLADOR: PKD1.7K GUÍA DEL USUARIO Tecnomatic-Systems.com CONTROLADOR: PKD1.7K Para el Operador 24VDC (voltios de corriente continua) de Puerta Abatible ADVERTENCIAS: Antes de realizar cualquier manipulación
Si queremos obtener resultados nunca alcanzados, debemos emplear métodos nunca empleados.
 DOMOTICA ÍNDICE 1. Características generales 1.1. Aplicaciones 1.1.1 Programación y ahorro energético 1.1.2 Confort 1.1.3 Seguridad 1.1.4 Comunicaciones 1.1.5 Accesibilidad 1.2. El sistema 1.2.1 Arquitectura
DOMOTICA ÍNDICE 1. Características generales 1.1. Aplicaciones 1.1.1 Programación y ahorro energético 1.1.2 Confort 1.1.3 Seguridad 1.1.4 Comunicaciones 1.1.5 Accesibilidad 1.2. El sistema 1.2.1 Arquitectura
NEUMATICA E HIDRAULICA
 1. INTRODUCCIÓN NEUMATICA E HIDRAULICA A nuestro alrededor existen multitud de ejemplos en los que se emplean sistemas neumáticos o hidráulicos. Normalmente se usan en aquellas aplicaciones que requieren
1. INTRODUCCIÓN NEUMATICA E HIDRAULICA A nuestro alrededor existen multitud de ejemplos en los que se emplean sistemas neumáticos o hidráulicos. Normalmente se usan en aquellas aplicaciones que requieren
CLASES DE COMPUTADORES
 Página 1 de 5 CLASES DE COMPUTADORES Las computadoras pueden clasificarse de acuerdo a: A. TIPO DE DATOS 1. DIGITALES Dispositivos de cálculo que procesan datos concretos, trabajan directamente contando
Página 1 de 5 CLASES DE COMPUTADORES Las computadoras pueden clasificarse de acuerdo a: A. TIPO DE DATOS 1. DIGITALES Dispositivos de cálculo que procesan datos concretos, trabajan directamente contando
Unidad 2 COMPONENTES
 Unidad 2 COMPONENTES Objetivo de la Unidad: Conocer los distintos elementos que conforman un sistema hidráulico, sus características y funciones. 2 SECCIONES DE UN SISTEMA HIDRÁULICO Generar Sección de
Unidad 2 COMPONENTES Objetivo de la Unidad: Conocer los distintos elementos que conforman un sistema hidráulico, sus características y funciones. 2 SECCIONES DE UN SISTEMA HIDRÁULICO Generar Sección de
Tema 1. Introducción al Control Automático
 Tema 1. Introducción al Control Automático Automática 2º Curso del Grado en Ingeniería en Tecnología Industrial Contenido Tema 1.- Introducción al Control automático 1.1. Introducción. 1.2. Conceptos y
Tema 1. Introducción al Control Automático Automática 2º Curso del Grado en Ingeniería en Tecnología Industrial Contenido Tema 1.- Introducción al Control automático 1.1. Introducción. 1.2. Conceptos y
Catálogo de Productos OBSAR:
 Catálogo de Productos OBSAR: 1. Línea de Controladores de Temperatura y Termostatos: Termostato Analógico TAN-04 (220V): Termostato Analógico totalmente electrónico, con sonda electrónica de precisión,
Catálogo de Productos OBSAR: 1. Línea de Controladores de Temperatura y Termostatos: Termostato Analógico TAN-04 (220V): Termostato Analógico totalmente electrónico, con sonda electrónica de precisión,
S0169/SM/10 - Mantenedor de presión y medidor de volumen Soilmatic E
 S0169/SM/10 - Mantenedor de presión y medidor de volumen Soilmatic E Rango de presión: 0-1MPa (0-10 bar) Capacidad volumétrica: 230cc Interface: Teclado táctil / conexión USB El mantenedor de Presión/Volumen
S0169/SM/10 - Mantenedor de presión y medidor de volumen Soilmatic E Rango de presión: 0-1MPa (0-10 bar) Capacidad volumétrica: 230cc Interface: Teclado táctil / conexión USB El mantenedor de Presión/Volumen
Cinemática del Robot. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
M.Sc. Kryscia Ramírez Benavides Sistema Robótico Cinemática Dinámica Planeamiento de Tareas Software Hardware Diseño Mecánico Actuadores Sistema de Control Sensores 2 Introducción Con el fin de controlar
CONTROLADORAS EDUCATIVAS. Por: Pedro Ruiz
 CONTROLADORAS EDUCATIVAS. Por: Pedro Ruiz CONTROLADORAS EDUCATIVAS. Índice 1. Introducción. 2. Definición de controladora, tipología. 3. Documentación. 1. Introducción. En este tema vamos a conocer una
CONTROLADORAS EDUCATIVAS. Por: Pedro Ruiz CONTROLADORAS EDUCATIVAS. Índice 1. Introducción. 2. Definición de controladora, tipología. 3. Documentación. 1. Introducción. En este tema vamos a conocer una
TEMA 3 ELECTRÓNICA TECNOLOGÍA 3º ESO. Samuel Escudero Melendo
 TEMA 3 ELECTRÓNICA TECNOLOGÍA 3º ESO Samuel Escudero Melendo QUÉ VEREMOS? CONCEPTOS BÁSICOS ELECTRICIDAD y ELECTRÓNICA CANTIDAD DE CARGA, INTENSIDAD, VOLTAJE, RESISTENCIA LEY DE OHM ELEMENTOS DE CIRCUITOS
TEMA 3 ELECTRÓNICA TECNOLOGÍA 3º ESO Samuel Escudero Melendo QUÉ VEREMOS? CONCEPTOS BÁSICOS ELECTRICIDAD y ELECTRÓNICA CANTIDAD DE CARGA, INTENSIDAD, VOLTAJE, RESISTENCIA LEY DE OHM ELEMENTOS DE CIRCUITOS
Procesos de Fabricación I. Guía 1 1 SISTEMAS DE CONTROL HIDRÁULICO Y NEUMÁTICO
 Procesos de Fabricación I. Guía 1 1 SISTEMAS DE CONTROL HIDRÁULICO Y NEUMÁTICO Sistemas de Control Hidráulico y Neumático. Guía 2 1 Tema: UTILIZACIÓN DE SOFTWARE PARA DISEÑO Y SIMULACIÓN DE CIRCUITOS NEUMÁTICOS.
Procesos de Fabricación I. Guía 1 1 SISTEMAS DE CONTROL HIDRÁULICO Y NEUMÁTICO Sistemas de Control Hidráulico y Neumático. Guía 2 1 Tema: UTILIZACIÓN DE SOFTWARE PARA DISEÑO Y SIMULACIÓN DE CIRCUITOS NEUMÁTICOS.
Planificaciones Control Indust. Distribuido. Docente responsable: FERREIRA AICARDI LYDIA FABIANA. 1 de 5
 Planificaciones 6629 - Control Indust. Distribuido Docente responsable: FERREIRA AICARDI LYDIA FABIANA 1 de 5 OBJETIVOS Desarrollar las jerarquias conceptuales correspondientes a la automatización industrial
Planificaciones 6629 - Control Indust. Distribuido Docente responsable: FERREIRA AICARDI LYDIA FABIANA 1 de 5 OBJETIVOS Desarrollar las jerarquias conceptuales correspondientes a la automatización industrial
INSTRUMENTACION - CONCEPTOS BASICOS DE INSTRUMENTACION Y CONTROL DEFINICIONES PARA EL ANALISIS DE INSTRUMENTOS Y SISTEMAS DE MEDICION Y CONTROL
 Contenido Apunte de Industrial: Definiciones para el análisis de instrumentos y sistemas de medición y control. Esquemas y simbología básica de los diagramas de instrumentación. Créditos: "Fisicanet" [en
Contenido Apunte de Industrial: Definiciones para el análisis de instrumentos y sistemas de medición y control. Esquemas y simbología básica de los diagramas de instrumentación. Créditos: "Fisicanet" [en
INSTRUMENTACIÓN DEL PROTOTIPO
 ANEXO D INSTRUMENTACIÓN DEL PROTOTIPO D1 PRESENTACIÓN D2.- TRANSMISORES DE PRESIÓN D2.1 - CALIBRACIÓN D3 - SONDAS DE TEMPERATURA INSTALADAS D4. MEDIDORES DE NIVEL D1 PRESENTACIÓN En este anexo se detalla
ANEXO D INSTRUMENTACIÓN DEL PROTOTIPO D1 PRESENTACIÓN D2.- TRANSMISORES DE PRESIÓN D2.1 - CALIBRACIÓN D3 - SONDAS DE TEMPERATURA INSTALADAS D4. MEDIDORES DE NIVEL D1 PRESENTACIÓN En este anexo se detalla
DETECCION DE INCENDIOS CARLOS MARCOS VERDUQUE ARQUITECTO TÉCNICO
 DETECCION DE INCENDIOS Se entiende por detección de incendios el hecho de descubrir y avisar que hay un incendio en un determinado lugar. La detección de un incendio se puede realizar por: Detección humana.
DETECCION DE INCENDIOS Se entiende por detección de incendios el hecho de descubrir y avisar que hay un incendio en un determinado lugar. La detección de un incendio se puede realizar por: Detección humana.
ENERGÍAS ALTERNATIVAS. SOLAR Y EÓLICA
 Objetivos del Curso: SOLAR TÉRMICA: - Estudiar los principios fundamentales de funcionamiento de un sistema de aprovechamiento de la energía solar térmica. - Determinar los elementos integrantes de una
Objetivos del Curso: SOLAR TÉRMICA: - Estudiar los principios fundamentales de funcionamiento de un sistema de aprovechamiento de la energía solar térmica. - Determinar los elementos integrantes de una
Periféricos Interfaces y Buses
 Periféricos Interfaces y Buses I. Arquitectura de E/S II. Programación de E/S III. Interfaces de E/S de datos IV. Dispositivos de E/S de datos Dispositivos de entrada de datos (teclado, escáner, tablas
Periféricos Interfaces y Buses I. Arquitectura de E/S II. Programación de E/S III. Interfaces de E/S de datos IV. Dispositivos de E/S de datos Dispositivos de entrada de datos (teclado, escáner, tablas