MÓDULO 2 Sergio Noriega
|
|
|
- Consuelo Sevilla Gómez
- hace 5 años
- Vistas:
Transcripción
1 MÓDULO 2
2 CU9 PROYECTO CU9 DISEÑO EN VHDL DE MICROPROCESADOR ELEMENTAL BASADO EN EL PROYECTO CU8, DONDE SE ADICIONA UN MODO DE DIRECCIONAMIEMTO INDIRECTO A MEMORIA DE DATOS, A TRAVÉS DE UN REGISTRO INDICE DENOMINADO "IX".
3 ENTRADA S A FPGA MUXMDRI MEMORIA IX MUXMAR 2 MAR PC16R CU9 RST CLK up16 FPGA BUS ADDRESS BUS DATA_IN MUXRX RX ALU CCR IR CPU MDRO MDRI BUS CONTROL BUS DATA _OUT REGPA REGPB SALIDAS DE FPGA PORT A ENTRADAS A FPGA PORT B
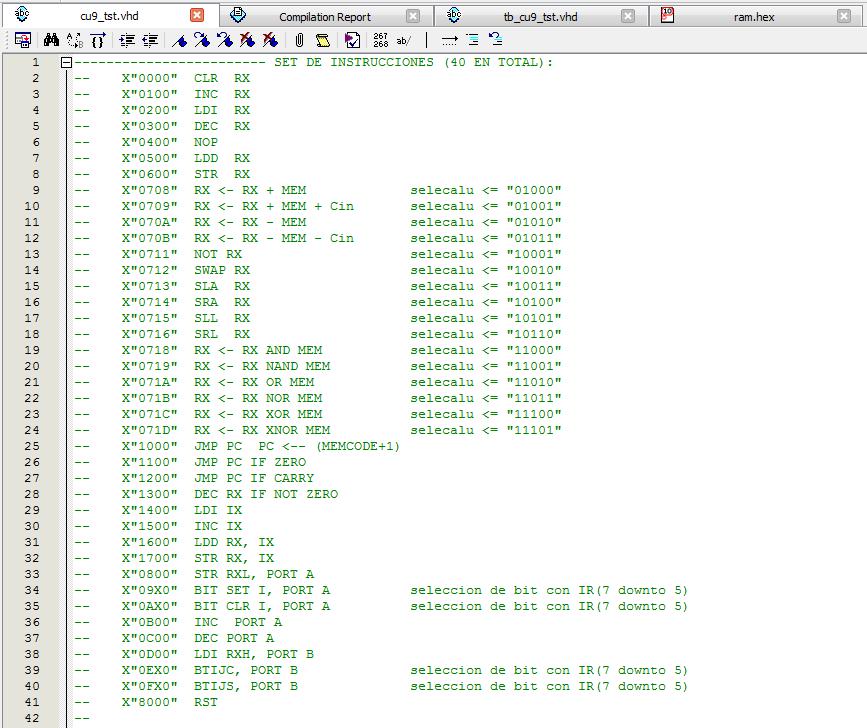
4 CU9 IR X 0000 X 0100 X 0200 X 0300 X 0400 X 8000 X 0500 X 0600 X 070X X 0800 X 09X0 X 0AX0 X 0B00 X 0C00 X 0D00 X 0E00 X 0F00 X 1000 X 1100 X 1200 X 1300 X"1400" X"1500" X"1600" X"1700" = CLR RX = INC RX = LDI RX = DEC RX = NOP = RST = LDD RX = STR RX = OPERACIONES ARITMÉTICO- LÓGICAS ENTRE MEMORIA DE DATOS Y REGISTRO RX = STR RXL, PORT A = BIT SET I, PORT A = BIT CLR I, PORT A = INC PORT A = DEC PORT A = LDI RX, PORT B = BTIJC, PORT B = BTIJS, PORT B = JMP PC, DIR = JMP PC, IF Z, DIR = JMP PC, IF C, DIR = DEC RX, IF NZ = LDI IX = INC IX = LDD RX, IX = STR RX, IX RESERVADOS PARA OPER. CON LA "ALU" USO ESTOS BITS PARA ENTRAR EL CÓDIGO DE IDENTIFICACIÓN DEL BIT A SELECCIONAR: PORT_A(BIT 0) = 000 PORT_A(BIT 1) = PORT_A(BIT 6) = 110 PORT_A(BIT 7) = 111 Total: 40 instrucciones
5 CU9 DIRECCIONAMIENTO INDEXADO SE SUMAN LAS SIGUIENTES INSTRUCCIONES : LDI_IX INC_IX LDD_RX_IX STR_RX_IX CARGA INMEDIATA DE REGISTRO "IX". INCREMENTO DEL CONTENIDO DEL REGISTRO "IX". CARGA DE "RX" CON CONTENIDO DE MEMORIA APUNTADA POR REGISTRO "IX". CARGA DE MEMORIA APUNTADA POR REGISTRO "IX" CON EL CONTENIDO DE "RX".
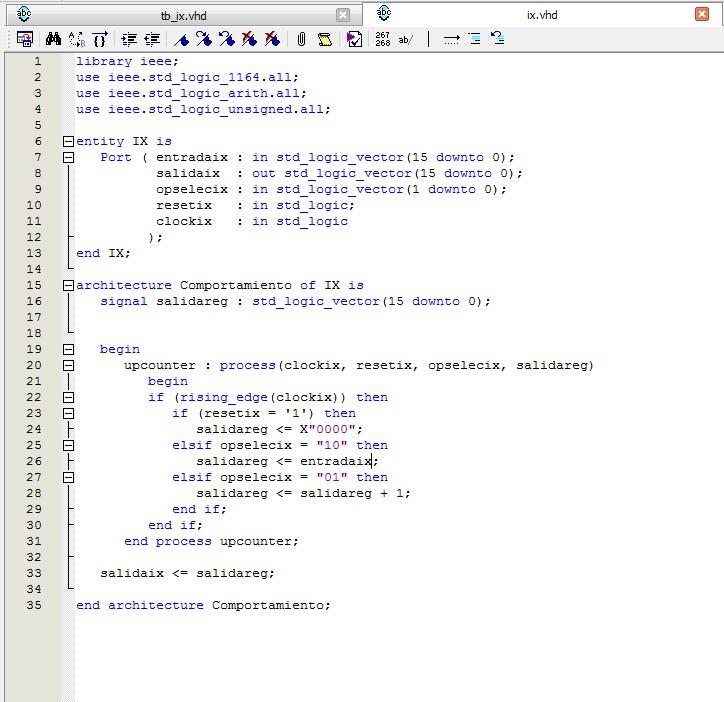
6 IX

7 MUXMAR2 MUXMAR2 PC MDRI IX SELEMUXMAR
8 CU9

9 CU9 CONTENIDO DEL ARCHIVO RAM.HEX PARA ESTE PROYECTO RUTINA DE PRUEBA 0000 CLR RX 0001 LDI IX, 0A A STR RX, IX 0004 INC IX 0005 INC RX 0006 STR RX, IX 0007 INC IX 0008 INC RX 0009 STR RX, IX 000A LDI IX, 0A00 000B 0A00 000C LDD RX, IX 000D STR RXL, PORTA 000E INC IX 000F STR RX, IX 0010 STR RXL, PORTA 0011 INC IX 0012 STR RX, IX 0013 STR RXL, PORTA 0014 INC RX 0015 JMP PC,

10 CU9 SE PRUEBAN LAS INSTRUCCIONES RELACIONADAS CON EL REGISTRO IX PRIMERO : SE ESCRIBEN LAS POSICIONES DE RAM DE 0A00, 0A01 Y 0A02 CON "STR RX,IX" SEGUNDO: SE LEEN DICHAS POSICIONES CON "LDD RX, IX" MIENTRAS SE ESCRIBEN EN PORTA. TERCERO: AL TERMINAR EL CICLO, SE INCREMENTA RX Y SALTA A "0001" DONDE SE REPITE TODO PERO CON NUEVOS VALORES DE "RX" EN UN LOOP INFINITO.
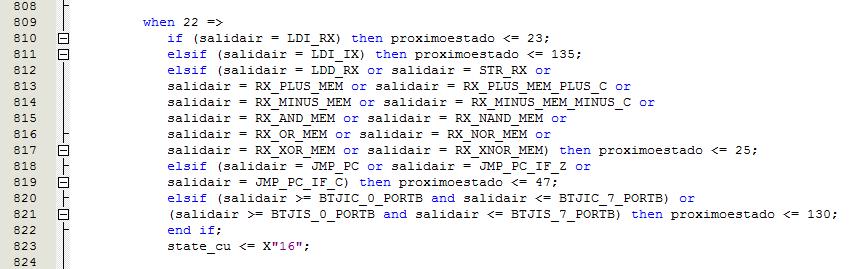
11 CU9 RUTINA PARA DETECCIÓN Y EJECUCIÓN DE INSTRUCCIÓN LDI_IX
12 CU9
13 CU9
14 CU9

15 CU9 RUTINA SIMILAR A LA DE "LDI RX"
16 CU9
17 CU9 RUTINA PARA DETECCIÓN Y EJECUCIÓN DE LAS INSTRUCCIONES LDD RX, IX Y STR RX, IX
18 CU9

19 CU9 PARA RACIONALIZAR ESTADOS, VUELVO A UTILIZAR PARTE DE LAS RUTINAS DE "LDD RX, MEM" Y "STR RX, MEM" COMUNES A "LDD RX, IX" Y "STR RX, IX".

20 CU9 RUTINA PARA DETECCIÓN Y EJECUCIÓN DE INSTRUCCIÓN "INC IX"
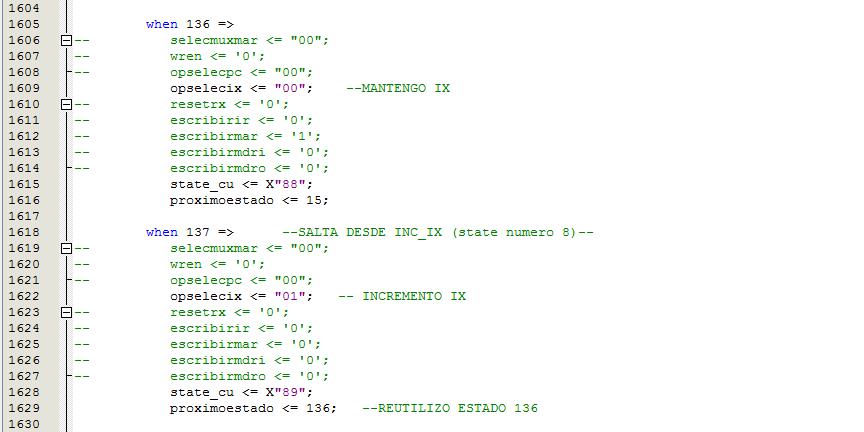
21 CU9
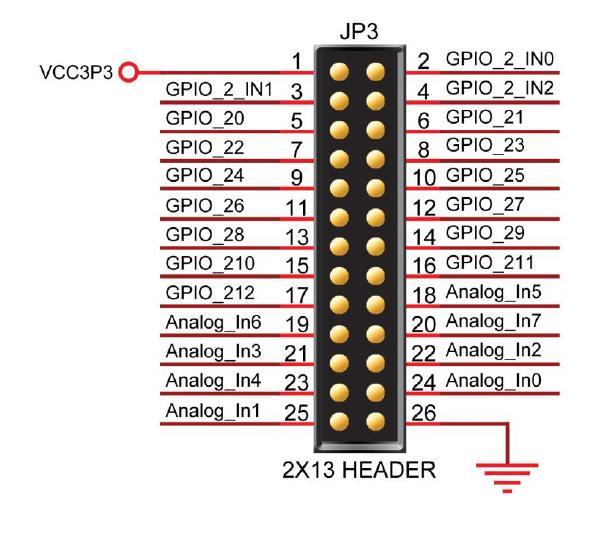
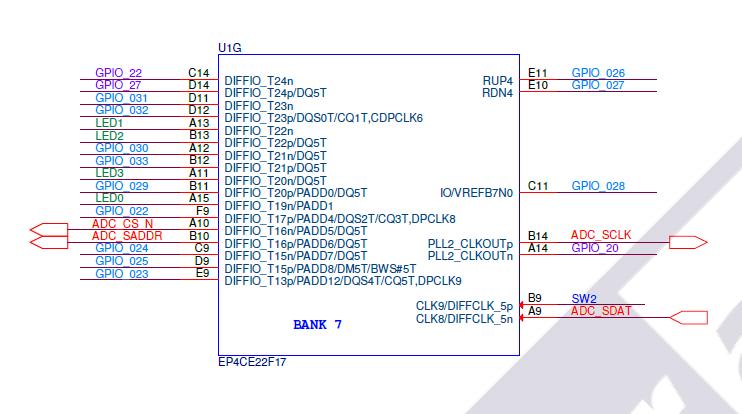
22 CU10 PROYECTO CU10 DISEÑO EN VHDL DE MICROPROCESADOR ELEMENTAL BASADO EN EL PROYECTO CU9, ADICIONANDO UN CONTROLADOR INDEPENDIENTE DEL CONVERSOR ANALÓGICO-DIGITAL TIPO SERIE ADC128S022, QUE SE ENCUENTRA INTEGRADO EN LA PLACA DE0-NANO DE LA CYCLONE IV..
23 MEMORIA CONVERSOR ADC SERIE CONTROLADOR DE ADC ENTRADA S A FPGA MUXMDRI2 IX MUXMAR 2 MAR PC16R CU10 up16 FPGA RST CLK ❶ BUS ADDRESS BUS DATA_IN MUXRX RX ALU CCR IR CPU MDRO MDRI BUS CONTROL BUS DATA _OUT ❶ REGPA REGPB PORT A PORT B SALIDAS DE FPGA ENTRADAS A FPGA

24 CU10 A10 B10 A9 B14
25 CU10
26 start_contr end_of_conv addr_contr salida_contr CU10 CONVERSOR ADC SERIE ADC128S022 csn_adc clock_adc din_adc dout_adc CONTROLADOR DE ADC FPGA muxmdri <= salida_contr addr_contr <= salidair(7 downto 5) up16
27 CU10 IR X 0000 X 0100 X 0200 X 0300 X 0400 X 8000 X 0500 X 0600 X 070X X 0800 X 09X0 X 0AX0 X 0B00 X 0C00 X 0D00 X 0E00 X 0F00 X 1000 X 1100 X 1200 X 1300 X"1400" X"1500" X"1600" X"1700" X 1800 X 1900 X 1A = CLR RX = INC RX = LDI RX = DEC RX = NOP = RST = LDD RX = STR RX = OPERACIONES ARITMÉTICO- LÓGICAS ENTRE MEMORIA DE DATOS Y REGISTRO RX = STR RXL, PORT A = BIT SET I, PORT A = BIT CLR I, PORT A = INC PORT A = DEC PORT A = LDI RX, PORT B = BTIJC, PORT B = BTIJS, PORT B = JMP PC, DIR = JMP PC, IF Z, DIR = JMP PC, IF C, DIR = DEC RX, IF NZ = LDI IX = INC IX = LDD RX, IX = STR RX, IX =START CONV CH I, ADC = LDD RX, ADC = JUMP PC IF EOC NZ, ADC RESERVADOS PARA OPER. CON LA "ALU" USO ESTOS BITS PARA ENTRAR EL CÓDIGO DE IDENTIFICACIÓN DEL BIT A SELECCIONAR: PORT_A(BIT 0) = 000 PORT_A(BIT 1) = PORT_A(BIT 6) = 110 PORT_A(BIT 7) = 111 Total: 43 instrucciones
28 CU10 Controlador del conversor ADC128S022 (de la placa Terasic DE0-Nano - Cyclone IV) Start Clock_50MHz Reset address FPGA Controlador ADC sal_controller End of Conversion csn sclk din dout ADC128S022 8 canales
29 CU10 ADC128S022
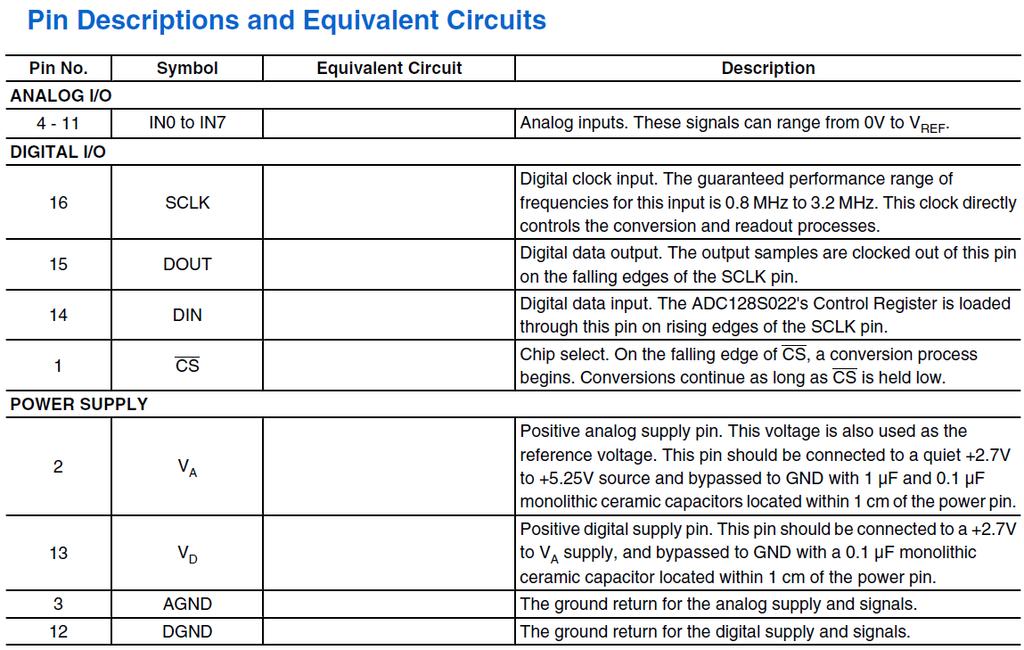
30 CU10 ADC128S022
31 CU10 ADC128S022
32 CU10 ADC128S022
33 CU10 DIAGRAMA DE TIEMPOS DE LAS SEÑALES DE CONTROL clock t start csn Momento de escribir al ADC Momento de leer el ADC t t sclk t din t dout DB11 DB10 DB9 DB8 DB7 DB6 DB5 DB4 DB3 DB2 DB1 DB0 Carga de datos al ADC: en cada flanco descendente de sclk. Lectura de datos desde el ADC : en cada flanco ascendente de sclk. t
34 CU10 Código del controlador del ADC
35 CU10 Enable se activa con «start_contr» y se desactiva con «counter = 32» Cambia el dato para el ADC en cada flanco ascendente que se envía a la línea «din_adc».
36 CU10 Se lee el dato desde el ADC en cada flanco descendente Por la línea «dout_adc» El dato en formato paralelo desde el ADC se refresca en cada fin de conversion del ADC (flanco ascendente de «csn») Se genera un pulso positivo al finalizar la conversión para que sea usado como «aviso» al micro.
37 CU10 Código del testbench del controlador del ADC
38 CU10 Cómo se debe adaptar este proyecto para ser usado por el microcontrolador...???

39 CU10 Simulación del controlador del ADC Aquí se generó artificialmente una respuesta del conversor.
40 CU11 PROYECTO CU11 DISEÑO EN VHDL DE UN CONTROLADOR MASTER PARA BUS SERIE I2C PARA SER EMPLEADO COMO CONTROL DE TRANSFERENCIA DE DATOS ENTRE EL MICROCONTROLADOR Y LA MEMORIA EEPROM SERIE 24LC02B QUE POSEE LA PLACA TERASIC DE0-NANO CYCLONE IV.
41 CU11 Controlador de bus maestro I2C Ejemplo con la memoria EEPROM 24LC02B (de la placa Terasic DE0-Nano - Cyclone IV) Start R_Wn Dataout Clock_200KHz Reset Addressin Datain FPGA Controlador I2C Acnowledge Error_out End_of_Trans Vdd SCL SDA Vdd Memoria EEPROM (2Kbits serie I2C) 24LC02B
 que gobierna el Master y el otro es de datos (SDA) que es bidireccional.")
42 CU11 I2C BUS La versión básica suele usar un dispositivo Master que controla por el bus desde un dispositivo Slave hasta 128 que pueden interactuar sólo con el Master. El bus es de 2 hilos, del tipo open-drain: Uno es un reloj (SCL) que gobierna el Master y el otro es de datos (SDA) que es bidireccional. La versión extendida consiste de múltiples Master que pueden tomar el control del bus a través de un modo de arbitraje.
 y una de finalización (STOP).")
43 CU11 I2C BUS Las líneas SCL y SDA deben terminar con una resistencia de pull-up y por lo tanto los terminales de dispositivos conectados a ellas deben admitir la bidireccionalidad. Todo proceso de comunicación para la transferencia de información debe consistir de una condición inicial de inicio (START) y una de finalización (STOP). En cada paquete enviado por el master se espera un reconocimiento del slave seleccionado. Si no responde debe generarse el apropiado manejo de error en dicha transferencia en una capa superior del protocolo de comunicación.
44 CU11 I2C BUS Los cambios en la línea de SDA para transferencia de datos se deben realizar siempre con SCL en bajo. Para comenzar una transacción se debe generar un flanco negativo en SDA cuando SCL esté en alto. Para terminar una transacción se debe generar un flanco positivo en SDA cuando SCL esté en alto.
45 CU11 I2C BUS Cuando el master comienza una transacción, manda una señal de START con SCL en «1». En los próximos 8 estados en bajo de SCL, manda 7 bits con la dirección del dispositivo elegido y otro bit en «0» o «1» para señalar que va a escribir o leer en el mismo. En el noveno ciclo de SCL, el master pone la línea SDA en «Z» y espera a recibir un dato por SDA (reconocimiento = acknowldge). Si recibe un «0» prosigue, sino ha habido un error. La cantidad de bytes subsiguientes son ilimitados y depende del sistema. Al finalizar cada byte se debe pedir reconocimiento. Para terminar se debe generar una señal de STOP.


46 CU11 24LC02B(I2C 2K EEPROM) Memoria EEPROM de 2Kbits en arreglo de 265 x 8. Bus de comunicación serie de dos cables tipo I2C. Velocidad de transferencia de 100KHz ó 400KHz. Protección contra escritura por hardware. Retención de datos hasta 200 años. Mas de 1 millón de ciclos de borrado/escritura.

47 CU11 24LC02B(I2C 2K EEPROM) Este modelo de memoria tiene una identificación de 7 bits: 1010XXX.
48 CU11 24LC02B(I2C 2K EEPROM) La escritura de un simple byte "BYTE WRITE" se realiza enviando : 1 - Dirección del dispositivo. 2 - Posición de memoria. MODO USADO AQUI 3 - Dato. EL DISPOSITIVO AL RECIBIR EL "STOP" LUEGO DE UN PEDIDO DE "WRITE", COMIENZA UN CICLO INTERNO DE ESCRITURA QUE PUEDE TARDAR HASTA 5 ms...!!! SE ESCRIBEN 8 BYTES CONSECUTIVOS Se puede escribir también, en múltiples posiciones de memoria consecutivas (hasta 8) denominado "PAGE WRITE", desde la inicial, enviando cada dato con su respectiva confirmación (ACK).
49 CU11 24LC02B(I2C 2K EEPROM) La memoria tiene un contador interno que se incrementa en cada acceso. Si por ejemplo, quedó apuntando en la dirección N, al generar una sesión de lectura como se muestra, se leerá el dato de la dirección N+1.
50 CU11 24LC02B(I2C 2K EEPROM) MODO USADO AQUI La forma convencional de lectura de una posición de memoria específica, es la de Random Read. Se deben generar dos ciclos: uno START-ACK y otro START-STOP. El primero direcciona el dispositivo y la posición de memoria deseada para leer. El segundo direcciona nuevamente el dispositivo pero indicándole que se lo va a leer y luego se adquiere el dato almacenado.
51 CU11 24LC02B(I2C 2K EEPROM) El caso «secuencial» permite la lectura de varias posiciones de memoria consecutivas, terminando la transacción con una señal de STOP.

52 CU11 En la placa Terasic DE0-Nano de Cyclone IV, las resistencias de pull-up ya están insertadas en la placa del impreso.

53 CU11 Código del controlador I2C
54 CU11
55 CU11 IMPORTANTE: EL DISPOSITIVO 24LC02, AL RECIBIR EL STOP" COMIENZA UN CICLO INTERNO DE ESCRITURA QUE TARDA 5 ms...!!! => ESTO DEBE SER CONSIDERADO EN LA RUTINA DEL CONTROLADOR "I2C" PARA EL MANEJO DE LA MEMORIA 24LC02...!!! QUE HABRÍA QUE MODIFICAR EN ESTE PROYECTO...???
56 CU11
57 CU11
58 CU11
59 CU11
60 CU11
61 CU11
62 CU11 Simulación de dos rutinas de escritura en la memoria serie EEPROM de dirección 1010xxx en las posiciones de memoria 00 y 01
63 CU11 Rutina completa de la primera escritura
64 CU11 Zoom de la primera rutina desde comienzo de START y escritura del CONTROL BYTE
65 CU11 Zoom de la primera rutina desde escritura de WORD ADDRESS y WRITE DATA

66 CU11 Rutina de la segunda escritura desde START e indicando CONTROL BYTE y WORD ADDRESS
67 CU11 Rutina de la segunda escritura desde WORD ADDRESS y WRITE DATA
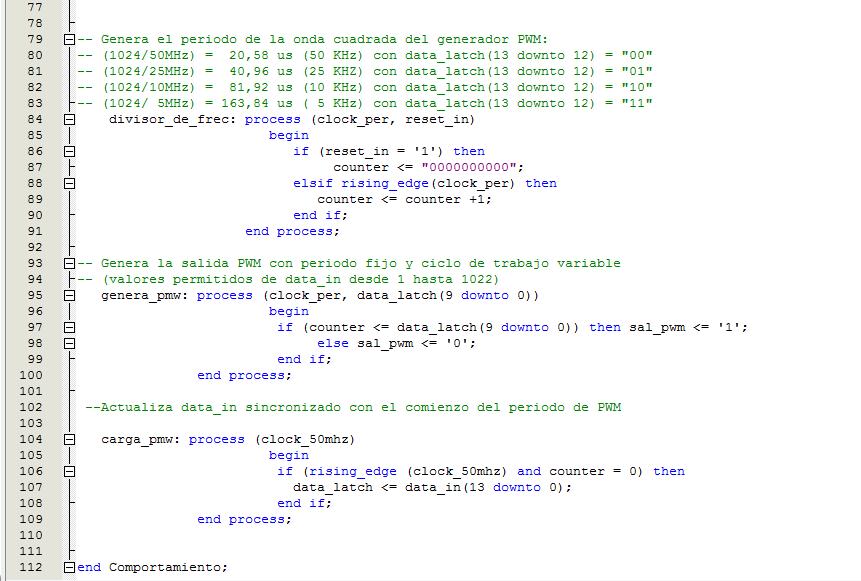
68 CU12 PROYECTO CU12 DISEÑO EN VHDL DE UN GENERADOR INDEPENDIENTE DE PWM (PULSE WIDTH MODULATION) PROGRAMABLE.
69 CU12 GENERADOR "PWM" (Pulse Width Modulation) Clock_50MHz Reset_in data_in Generador PWM sal_pwm Genera una onda cuadrada de ciclo de trabajo variable y frecuencia ajustable. data_in (9 downto 0) = Define el ciclo de trabajo (resolución 1/1024 ó 1 ) data_in (13 downto 12) = Define la frecuencia de referencia(50, 25, 10 ó 5 KHz)
70 CU12 GENERACIÓN DE SEÑAL "PWM" (Pulse Width Modulation) clock_50mhz clock_per sal_pwm Desde 1 hasta 1022 ciclos de clock_per t t t mode_ucnt => "x x M1 M0 x x D9...D0" M1 M0 => F_pwm KHz KHz KHz KHz Desde 1022 a 1 Período de clock_per Rango de 1 a 1023 períodos de clock_per para definir el "1" lógico

71 CU12 Código del Generador PWM
72 CU12
73 CU12

74 CU12 Código del TestBench para el Generador PWM
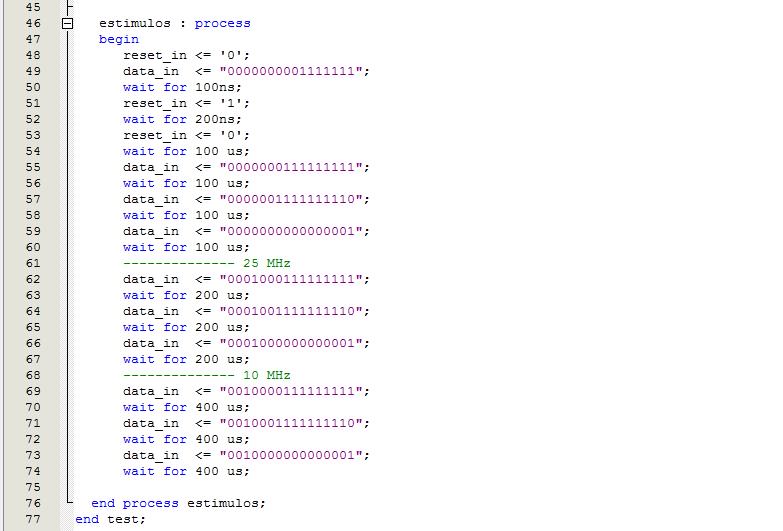
75 CU12
76 CU12 Período de la frecuencia = 20,48 us
77 CU12 Período de la frecuencia = 40,959 us
MÓDULO 2 Sergio Noriega
 MÓDULO 2 Sergio Noriega - 2016 CU9 PROYECTO CU9 DISEÑO EN VHDL DE MICROPROCESADOR ELEMENTAL BASADO EN EL PROYECTO CU8, DONDE SE ADICIONA UN MODO DE DIRECCIONAMIEMTO INDIRECTO A MEMORIA DE DATOS, A TRAVÉS
MÓDULO 2 Sergio Noriega - 2016 CU9 PROYECTO CU9 DISEÑO EN VHDL DE MICROPROCESADOR ELEMENTAL BASADO EN EL PROYECTO CU8, DONDE SE ADICIONA UN MODO DE DIRECCIONAMIEMTO INDIRECTO A MEMORIA DE DATOS, A TRAVÉS
CU6 FPGA. up16 DIV_CLK CLK_UP16 CLK PC16R MUXMAR BUS MAR RST DIR MEM MEMORIA MEMORIA BUS MUXRX DATA MEM BUS CONTROL CPU ALU BUS MDRO MDRI DATA MEM OUT
 CU6 PROYECTO CU6 DISEÑO EN VHDL DE MICROPROCESADOR ELEMENTAL CON UN REGISTRO INTERNO CON ACCESO DIRECTO A LA MEMORIA DE DATOS PARA REALIZAR LECTURA Y ESCRITURA DE LA MISMA Y OPERACIONES ARITMÉTICO-LÓGICAS
CU6 PROYECTO CU6 DISEÑO EN VHDL DE MICROPROCESADOR ELEMENTAL CON UN REGISTRO INTERNO CON ACCESO DIRECTO A LA MEMORIA DE DATOS PARA REALIZAR LECTURA Y ESCRITURA DE LA MISMA Y OPERACIONES ARITMÉTICO-LÓGICAS
CU4 PROYECTO CU4 DISEÑO EN VHDL DE MICROPROCESADOR ELEMENTAL CON UN REGISTRO INTERNO DE DATOS PARA REALIZAR OPERACIONES INTERNAS BÁSICAS.
 CU4 PROYECTO CU4 DISEÑO EN VHDL DE MICROPROCESADOR ELEMENTAL CON UN REGISTRO INTERNO DE DATOS PARA REALIZAR OPERACIONES INTERNAS BÁSICAS. SE AGREGA A PARTIR DE ESTE PROYECTO, UN DIVISOR DE FRECUENCIAS
CU4 PROYECTO CU4 DISEÑO EN VHDL DE MICROPROCESADOR ELEMENTAL CON UN REGISTRO INTERNO DE DATOS PARA REALIZAR OPERACIONES INTERNAS BÁSICAS. SE AGREGA A PARTIR DE ESTE PROYECTO, UN DIVISOR DE FRECUENCIAS
CU4 PROYECTO CU4 DISEÑO EN VHDL DE MICROPROCESADOR ELEMENTAL CON UN REGISTRO INTERNO DE DATOS PARA REALIZAR OPERACIONES INTERNAS BÁSICAS.
 CU4 PROYECTO CU4 DISEÑO EN VHDL DE MICROPROCESADOR ELEMENTAL CON UN REGISTRO INTERNO DE DATOS PARA REALIZAR OPERACIONES INTERNAS BÁSICAS. SE AGREGA, A PARTIR DE ESTE PROYECTO, UN DIVISOR DE FRECUENCIAS
CU4 PROYECTO CU4 DISEÑO EN VHDL DE MICROPROCESADOR ELEMENTAL CON UN REGISTRO INTERNO DE DATOS PARA REALIZAR OPERACIONES INTERNAS BÁSICAS. SE AGREGA, A PARTIR DE ESTE PROYECTO, UN DIVISOR DE FRECUENCIAS
Diseño y verificación en VHDL de microcontrolador implementado en FPGA
 SEMINARIO DE EXTENSIÓN DE ISLD 2017 uc16 Diseño y verificación en VHDL de microcontrolador implementado en FPGA Sergio Noriega Clase inicial: Jueves 24 de Agosto, de 8:15 a 10:15 hs, Aula 32. Total 12
SEMINARIO DE EXTENSIÓN DE ISLD 2017 uc16 Diseño y verificación en VHDL de microcontrolador implementado en FPGA Sergio Noriega Clase inicial: Jueves 24 de Agosto, de 8:15 a 10:15 hs, Aula 32. Total 12
Diseño y verificación en VHDL de microcontrolador implementado en FPGA
 SEMINARIO DE EXTENSIÓN DE ISLD 2016 uc16 Diseño y verificación en VHDL de microcontrolador implementado en FPGA Sergio Noriega Clase inicial: Jueves 18 de Agosto, de 8:15 a 10:15 hs, Sala de Conferencias
SEMINARIO DE EXTENSIÓN DE ISLD 2016 uc16 Diseño y verificación en VHDL de microcontrolador implementado en FPGA Sergio Noriega Clase inicial: Jueves 18 de Agosto, de 8:15 a 10:15 hs, Sala de Conferencias
SEMINARIO DE EXTENSIÓN DE ISLD
 SEMINARIO DE EXTENSIÓN DE ISLD Sergio Noriega - 2014 OBJETIVOS EL PRESENTE SEMINARIO TIENE COMO OBJETIVO, INTRODUCIR A LOS ALUMNOS AL DISEÑO Y VERIFICACIÓN DE CIRCUITOS DIGITALES COMPLEJOS, EMPLEANDO TÉCNICAS
SEMINARIO DE EXTENSIÓN DE ISLD Sergio Noriega - 2014 OBJETIVOS EL PRESENTE SEMINARIO TIENE COMO OBJETIVO, INTRODUCIR A LOS ALUMNOS AL DISEÑO Y VERIFICACIÓN DE CIRCUITOS DIGITALES COMPLEJOS, EMPLEANDO TÉCNICAS
EL BUS I2C CARACTERISTICAS. Fernando Remiro
 CARACTERISTICAS Fernando Remiro 1 CARACTERÍSTICAS Utiliza 2 líneas para transportar la información entre los distintos periféricos conectados al bus SDA (datos) SCL (reloj) Cada dispositivo se identifica
CARACTERISTICAS Fernando Remiro 1 CARACTERÍSTICAS Utiliza 2 líneas para transportar la información entre los distintos periféricos conectados al bus SDA (datos) SCL (reloj) Cada dispositivo se identifica
Contador Universal CU13. Contador Universal. Out_bcd3 Out_bcd2 Out_bcd1 Out_bcd0 Overflow End of Conversion. Medidor de Frecuencias
 PROYECTO CU13 DISEÑO EN VHDL DE UN CONTADOR UNIVERSAL INDEPENDIENTE PROGRAMABLE DE 4 DÍGITOS BCD. PERMITE TRES MODOS DIFERENTES DE MEDICIÓN: --FRECUENCIA. --PERÍODO. --INTERVALO DE TIEMPO. Contador Universal
PROYECTO CU13 DISEÑO EN VHDL DE UN CONTADOR UNIVERSAL INDEPENDIENTE PROGRAMABLE DE 4 DÍGITOS BCD. PERMITE TRES MODOS DIFERENTES DE MEDICIÓN: --FRECUENCIA. --PERÍODO. --INTERVALO DE TIEMPO. Contador Universal
MICROCONTROLADORES PIC
 MICROCONTROLADORES PIC Bienvenidos - Clase 8 Protocolo de Comunicación I 2 C. Semestre I de 2010 Adaptado Por: Lewin Andrés López Preámbulo Protocolo entre periféricos: conjunto de reglas o normas para
MICROCONTROLADORES PIC Bienvenidos - Clase 8 Protocolo de Comunicación I 2 C. Semestre I de 2010 Adaptado Por: Lewin Andrés López Preámbulo Protocolo entre periféricos: conjunto de reglas o normas para
PROYECTOS EN VHDL PARA CONTROL DE MONITOR VGA DESDE UNA FPGA
 PROYECTOS EN VHDL PARA CONTROL DE MONITOR VGA DESDE UNA FPGA Sergio Noriega 2017 TABLA DE CÓDIGOS ASCII Internacionalmente se estandarizó un código para para la representación de caracteres visibles para
PROYECTOS EN VHDL PARA CONTROL DE MONITOR VGA DESDE UNA FPGA Sergio Noriega 2017 TABLA DE CÓDIGOS ASCII Internacionalmente se estandarizó un código para para la representación de caracteres visibles para
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Muestreo de señales analógicas Principal requerimiento que surge al muestrear una señal continua: Definir el periodo de muestreo con suficiente exactitud. Ajustar el mismo a un valor adecuado de acuerdo
Muestreo de señales analógicas Principal requerimiento que surge al muestrear una señal continua: Definir el periodo de muestreo con suficiente exactitud. Ajustar el mismo a un valor adecuado de acuerdo
SADE en LabView. IO PIN: SADE cuenta con 13 pines que se pueden configurar como entrada, salida e inclusive como PWM.
 SADE en LabView SADE (Sistema de Adquisición de Datos flexible ) es la aplicación de INTESC la cual facilita el manejo de la tarjeta Symbhia mediante comandos en lenguaje de alto nivel. En el siguiente
SADE en LabView SADE (Sistema de Adquisición de Datos flexible ) es la aplicación de INTESC la cual facilita el manejo de la tarjeta Symbhia mediante comandos en lenguaje de alto nivel. En el siguiente
Ventajas del BUS I2C
 BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC TC74: Termómetro digital 1 Ventajas del BUS I2C Definido inicialmente a mediados de los 80 para trabajar a 100kbit/s y en 1995 se definió un
BUS I2C: IMPLEMENTACIÓN PRÁCTICA CON MICROCONTROLADORES PIC TC74: Termómetro digital 1 Ventajas del BUS I2C Definido inicialmente a mediados de los 80 para trabajar a 100kbit/s y en 1995 se definió un
AUTOMATIZACION. Reconocer la arquitectura y características de un PLC Diferenciar los tipos de entradas y salidas MARCO TEORICO. Estructura Interna
 AUTOMATIZACION GUIA DE TRABAJO 3 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Reconocer la arquitectura
AUTOMATIZACION GUIA DE TRABAJO 3 DOCENTE: VICTOR HUGO BERNAL UNIDAD No. 3 OBJETIVO GENERAL Realizar una introducción a los controladores lógicos programables OBJETIVOS ESPECIFICOS: Reconocer la arquitectura
Integración de Equipos para Comunicaciones
 Integración de Equipos para Comunicaciones Tema 3: Bus XT Aurelio Vega Martínez DIEA: Integración de Equipos para Comunicaciones. (Tema 3: Bus XT). Pág. 1 Introducción. Diseñado en un principio para trabajar
Integración de Equipos para Comunicaciones Tema 3: Bus XT Aurelio Vega Martínez DIEA: Integración de Equipos para Comunicaciones. (Tema 3: Bus XT). Pág. 1 Introducción. Diseñado en un principio para trabajar
Arquitectura de computadores I
 Arquitectura de computadores I Perspectiva de alto nivel de los computadores Septiembre de 2017 Contenido Componentes del computador Funcionamiento del computador Estructuras de interconexión Interconexión
Arquitectura de computadores I Perspectiva de alto nivel de los computadores Septiembre de 2017 Contenido Componentes del computador Funcionamiento del computador Estructuras de interconexión Interconexión
ITT-327-T Microprocesadores
 ITT-327-T Microprocesadores Temporizador Programable (PIT) 8254. Temporizador/Contador Programable (PIT) 8254. Es un contador/temporizador programable diseñado para trabajar con los sistemas de microcomputadores.
ITT-327-T Microprocesadores Temporizador Programable (PIT) 8254. Temporizador/Contador Programable (PIT) 8254. Es un contador/temporizador programable diseñado para trabajar con los sistemas de microcomputadores.
Tema 0. Introducción a los computadores
 Tema 0 Introducción a los computadores 1 Definición de computador Introducción Máquina capaz de realizar de forma automática y en una secuencia programada cierto número de operaciones sobre unos datos
Tema 0 Introducción a los computadores 1 Definición de computador Introducción Máquina capaz de realizar de forma automática y en una secuencia programada cierto número de operaciones sobre unos datos
ARQUITECTURA DE COMPUTADORES DESCRIPCIÓN BUS PCI (Tema 1: Conexión Externa de Procesadores. Buses)
") ARQUITECTURA DE COMPUTADORES DESCRIPCIÓN BUS PCI (Tema 1: Conexión Externa de Procesadores. Buses) http:// www.atc.us.es Índice 1. Características bus PCI 2. Señales PCI 3. Transferencias PCI 4. Comandos
ARQUITECTURA DE COMPUTADORES DESCRIPCIÓN BUS PCI (Tema 1: Conexión Externa de Procesadores. Buses) http:// www.atc.us.es Índice 1. Características bus PCI 2. Señales PCI 3. Transferencias PCI 4. Comandos
APUNTE DEL 8155 ELECTRÓNICA DIGITAL III
 APUNTE DEL 8155 ELECTRÓNICA DIGITAL III Revisión 1.1 Marzo, 2011 Interfaz a periférico 8155 Descripción general El chip 8155 es un dispositivo introducido por Intel en 1977. Contiene memoria RAM (SRAM)
APUNTE DEL 8155 ELECTRÓNICA DIGITAL III Revisión 1.1 Marzo, 2011 Interfaz a periférico 8155 Descripción general El chip 8155 es un dispositivo introducido por Intel en 1977. Contiene memoria RAM (SRAM)
Lógica cableada: Lógica programada:
 1-1 Lógica cableada: Circuitos vistos en Diseño Lógico (Combinatoria, Modo reloj, RTL, ) Función fija determinada en el momento del diseño por las conexiones físicas entre los componentes del circuito
1-1 Lógica cableada: Circuitos vistos en Diseño Lógico (Combinatoria, Modo reloj, RTL, ) Función fija determinada en el momento del diseño por las conexiones físicas entre los componentes del circuito
Vista de Alto Nivel del Funcionamiento del Computador Interconectividad
 Vista de Alto Nivel del Funcionamiento del Computador Interconectividad Del capítulo 3 del libro Organización y Arquitectura de Computadores William Stallings Concepto de Programa Sistemas cableados son
Vista de Alto Nivel del Funcionamiento del Computador Interconectividad Del capítulo 3 del libro Organización y Arquitectura de Computadores William Stallings Concepto de Programa Sistemas cableados son
Enlaces Seriales UART, I2C, SPI
 Comunicaciones, Enlaces Seriales UART, I2C, SPI (Preparen Papel y Lápiz) Diagrama de Bloques Fecha y Hora Entradas Procesamiento Procesamiento Comunicación Comunicación Universidad TransmisiónNacional
Comunicaciones, Enlaces Seriales UART, I2C, SPI (Preparen Papel y Lápiz) Diagrama de Bloques Fecha y Hora Entradas Procesamiento Procesamiento Comunicación Comunicación Universidad TransmisiónNacional
MICROCONTROLADORES PIC16F84 ING. RAÚL ROJAS REÁTEGUI
 MICROCONTROLADORES PIC16F84 ING. RAÚL ROJAS REÁTEGUI DEFINICIÓN Es un microcontrolador de Microchip Technology fabricado en tecnología CMOS, completamente estático es decir si el reloj se detiene los datos
MICROCONTROLADORES PIC16F84 ING. RAÚL ROJAS REÁTEGUI DEFINICIÓN Es un microcontrolador de Microchip Technology fabricado en tecnología CMOS, completamente estático es decir si el reloj se detiene los datos
Curso de. Módulo 10 MSSP: I2C. Ricardo Gómez González Andrés Prieto-Moreno Torres
 Curso de Micro controladores PIC Módulo 10 MSSP: I2C Juan González Gómez Ricardo Gómez González Andrés Prieto-Moreno Torres 1 Índice 1. Introducción al I2C 2. Registros I2C PIC16f876A 3. Ejemplo de Uso
Curso de Micro controladores PIC Módulo 10 MSSP: I2C Juan González Gómez Ricardo Gómez González Andrés Prieto-Moreno Torres 1 Índice 1. Introducción al I2C 2. Registros I2C PIC16f876A 3. Ejemplo de Uso
INFORMÁTICA INDUSTRIAL. 3º INGENIERÍA TÉCNICA ELECTRÓNICA TRABAJO TUTORADO DE VHDL. Primer Cuatrimestre Curso 2005/2006.
 INFORMÁTICA INDUSTRIAL. 3º INGENIERÍA TÉCNICA ELECTRÓNICA TRABAJO TUTORADO DE VHDL. Primer Cuatrimestre Curso 2005/2006. OBJETIVOS: Con este proyecto se pretende que el alumno practique y afiance los conocimientos
INFORMÁTICA INDUSTRIAL. 3º INGENIERÍA TÉCNICA ELECTRÓNICA TRABAJO TUTORADO DE VHDL. Primer Cuatrimestre Curso 2005/2006. OBJETIVOS: Con este proyecto se pretende que el alumno practique y afiance los conocimientos
Elementos constituyentes de la ejecución de un programa
 Micro-Operaciones En la ejecución de un programa en una computadora, se ejecutan instrucciones, que pueden subdividirse en ciclos: Búsqueda/Ejecución Cada ciclo se compone a su vez de una serie de operaciones
Micro-Operaciones En la ejecución de un programa en una computadora, se ejecutan instrucciones, que pueden subdividirse en ciclos: Búsqueda/Ejecución Cada ciclo se compone a su vez de una serie de operaciones
Comunicación Serie IIC: Inter-Integrated Circuit
 Comunicación Serie IIC: Inter-Integrated Circuit IIC: Inter-Integrated Circuit I2C es un bus serial, multi-master, de baja velocidad (de 10 a 400kbps), creado por Philips. El objetivo es facilitar la conexión
Comunicación Serie IIC: Inter-Integrated Circuit IIC: Inter-Integrated Circuit I2C es un bus serial, multi-master, de baja velocidad (de 10 a 400kbps), creado por Philips. El objetivo es facilitar la conexión
2. PANTALLA ALFANUMÉRICA DE LCD (HITACHI HD44780U)
") 2. PANTALLA ALFANUMÉRICA DE LCD (HITACHI HD44780U) Este controlador de la casa Hitachi se usa para mostrar caracteres alfanuméricos en paneles LCD de matriz pasiva (los típicos que se pueden encontrar
2. PANTALLA ALFANUMÉRICA DE LCD (HITACHI HD44780U) Este controlador de la casa Hitachi se usa para mostrar caracteres alfanuméricos en paneles LCD de matriz pasiva (los típicos que se pueden encontrar
PCF8574 EXPANSOR REMOTO 8-BIT I/O PARA I²C-BUS
 PCF8574 EXPANSOR REMOTO 8-BIT I/O PARA I²C-BUS 1. CARACTERISTCAS Suministro de voltaje de funcionamiento 2.5 a 6 V Bajo consumo de corriente de espera (standby) de 10 ma máximo. Expansor I²C a puerto paralelo.
PCF8574 EXPANSOR REMOTO 8-BIT I/O PARA I²C-BUS 1. CARACTERISTCAS Suministro de voltaje de funcionamiento 2.5 a 6 V Bajo consumo de corriente de espera (standby) de 10 ma máximo. Expansor I²C a puerto paralelo.
Elección de un microcontrolador
 Elección de un microcontrolador Decisión multivariable. No hay un óptimo evidente Factores: Herramientas de desarrollo Base de conocimientos Precio y disponibilidad Familia versátil y en desarrollo Cantidad
Elección de un microcontrolador Decisión multivariable. No hay un óptimo evidente Factores: Herramientas de desarrollo Base de conocimientos Precio y disponibilidad Familia versátil y en desarrollo Cantidad
Titulación: Ingeniería Informática Asignatura: Fundamentos de Computadores. Bloque 3: Sistemas secuenciales Tema 9: Módulos secuenciales básicos
 Titulación: Ingeniería Informática Asignatura: Fundamentos de Computadores Bloque 3: Sistemas secuenciales Tema 9: Módulos secuenciales básicos Pablo Huerta Pellitero Luis Rincón Córcoles ÍNDICE Bibliografía
Titulación: Ingeniería Informática Asignatura: Fundamentos de Computadores Bloque 3: Sistemas secuenciales Tema 9: Módulos secuenciales básicos Pablo Huerta Pellitero Luis Rincón Córcoles ÍNDICE Bibliografía
Buses. Organización del Computador I. David Alejandro González Márquez
 Buses Organización del Computador I David Alejandro González Márquez Departamento de Computación Facultad de Ciencias Exactas y Naturales Universidad de Buenos Aires 27.02.2015 Agenda Introducción Tipos
Buses Organización del Computador I David Alejandro González Márquez Departamento de Computación Facultad de Ciencias Exactas y Naturales Universidad de Buenos Aires 27.02.2015 Agenda Introducción Tipos
8237A. Programación en Ensamblador Ing. Marcelo Tosini
 8237A Características Permite realizar transferencias desde dispositivos de I/O a memoria memoria a dispositivos de I/O memoria a memoria Frecuencia de funcionamiento de 6 Khz Hoy en día no es necesario
8237A Características Permite realizar transferencias desde dispositivos de I/O a memoria memoria a dispositivos de I/O memoria a memoria Frecuencia de funcionamiento de 6 Khz Hoy en día no es necesario
COMUNICACIÓN I2C (INTER-INTEGRATED CIRCUIT)
") COMUNICACIÓN I2C (INTER-INTEGRATED CIRCUIT) Centro CFP/ES COMUNICACIÓN I2C 1 VENTAJAS DE LA COMUNICACIÓN I2C COMPARATIVA ESTANDAR DE TRANSMISIÓN 2 DISPOSITIVOS I2C DISPOSITIVOS I2C MAX518 3 DISPOSITIVOS
COMUNICACIÓN I2C (INTER-INTEGRATED CIRCUIT) Centro CFP/ES COMUNICACIÓN I2C 1 VENTAJAS DE LA COMUNICACIÓN I2C COMPARATIVA ESTANDAR DE TRANSMISIÓN 2 DISPOSITIVOS I2C DISPOSITIVOS I2C MAX518 3 DISPOSITIVOS
Microprocesador. Introducción. Instituto Sagrado Corazón de Jesús
 Microprocesador Introducción El microprocesador es la parte de la computadora diseñada para llevar acabo o ejecutar los programas. Este viene siendo el cerebro de la computadora, el motor, el corazón de
Microprocesador Introducción El microprocesador es la parte de la computadora diseñada para llevar acabo o ejecutar los programas. Este viene siendo el cerebro de la computadora, el motor, el corazón de
Tema 4. Organización de la memoria
 Tema 4 Organización de la memoria 1 ARQUITECTURA DEL PIC16F84 Tema 4. Organización de la memoria Memoria de programa tipo ROM Flash de 1024 registros de 14 bits Memoria de datos dividida en dos áreas:
Tema 4 Organización de la memoria 1 ARQUITECTURA DEL PIC16F84 Tema 4. Organización de la memoria Memoria de programa tipo ROM Flash de 1024 registros de 14 bits Memoria de datos dividida en dos áreas:
COMUNICACIÓN I2C (Bus de circuito inter-integrado)
") Aplicar los conocimientos básicos de electrónica de manera teórica (lenguaje ANSI-C) y práctica (montaje de circuitos). Conocer las funciones que gobiernan las entradas y salidas del microcontrolador PIC18F47J53.
Aplicar los conocimientos básicos de electrónica de manera teórica (lenguaje ANSI-C) y práctica (montaje de circuitos). Conocer las funciones que gobiernan las entradas y salidas del microcontrolador PIC18F47J53.
BUS DE COMUNICACIÓN I 2 C
 APÉNDICE H BUS DE COMUNICACIÓN I 2 C El término I 2 C da nombre a un estándar para bus de comunicaciones serie. El nombre proviene de Inter-Integrated Circuits. El diseñador es el fabricante Philips. Existen
APÉNDICE H BUS DE COMUNICACIÓN I 2 C El término I 2 C da nombre a un estándar para bus de comunicaciones serie. El nombre proviene de Inter-Integrated Circuits. El diseñador es el fabricante Philips. Existen
Introducción a las Computadoras. Capítulo 3 Buses del Sistema
 Introducción a las Computadoras Capítulo 3 Buses del Sistema Concepto de Programa Los sistemas de propósito específico no son flexibles El Hardware de propósito general puede realizar diferentes tareas,
Introducción a las Computadoras Capítulo 3 Buses del Sistema Concepto de Programa Los sistemas de propósito específico no son flexibles El Hardware de propósito general puede realizar diferentes tareas,
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Muestreo de señales analógicas Principal requerimiento que surge al muestrear una señal continua: Definir el periodo de muestreo con suficiente exactitud. Ajustar el mismo a un valor adecuado de acuerdo
Muestreo de señales analógicas Principal requerimiento que surge al muestrear una señal continua: Definir el periodo de muestreo con suficiente exactitud. Ajustar el mismo a un valor adecuado de acuerdo
Microcontrolador PIC16F84: Arquitectura
 Microcontrolador PIC16F84: Arquitectura La arquitectura del PIC es tipo Harvard: Mem. de Programa (instrucciones) (tipo FLASH) Control DIR DATOS µp (tipo RISC, pipeline de 2 etapas) Control DIR DATOS 14
Microcontrolador PIC16F84: Arquitectura La arquitectura del PIC es tipo Harvard: Mem. de Programa (instrucciones) (tipo FLASH) Control DIR DATOS µp (tipo RISC, pipeline de 2 etapas) Control DIR DATOS 14
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Ejercicio: construir un datalogger El datalogger o registrador debe sensar la temperatura ambiente cada 1s y guardarla junto a la fecha y hora de adquisición en un archivo.txt alojado en una memoria µsd.
Ejercicio: construir un datalogger El datalogger o registrador debe sensar la temperatura ambiente cada 1s y guardarla junto a la fecha y hora de adquisición en un archivo.txt alojado en una memoria µsd.
Tema 0. Introducción a los computadores
 Tema 0 Introducción a los computadores 1 Definición de computador Introducción Máquina capaz de realizar de forma automática y en una secuencia programada cierto número de operaciones sobre unos datos
Tema 0 Introducción a los computadores 1 Definición de computador Introducción Máquina capaz de realizar de forma automática y en una secuencia programada cierto número de operaciones sobre unos datos
SelectRAM+memory Bloques de memoria RAM En las FPGAs Spartan IIE
 1 SelectRAM+memory Bloques de memoria RAM En las FPGAs Spartan IIE tiempo de acceso RAM, algunas veces se usa cerrojo en el Juan Manuel Narváez Sánchez, Carlos Andrés Moreno Tenjica, Estudent Member IEEE
1 SelectRAM+memory Bloques de memoria RAM En las FPGAs Spartan IIE tiempo de acceso RAM, algunas veces se usa cerrojo en el Juan Manuel Narváez Sánchez, Carlos Andrés Moreno Tenjica, Estudent Member IEEE
INFORMÁTICA INDUSTRIAL. 3º INGENIERÍA TÉCNICA INDUSTRIAL. ESPECIALIDAD ELECTRÓNICA BOLETÍN 2. CURSO 2003/04
 INFORMÁTICA INDUSTRIAL. 3º INGENIERÍA TÉCNICA INDUSTRIAL. ESPECIALIDAD ELECTRÓNICA BOLETÍN 2. CURSO 2003/04 1. Dado un decodificador de dos entradas (DEC 2:4), dar la descripción estructural, la descripción
INFORMÁTICA INDUSTRIAL. 3º INGENIERÍA TÉCNICA INDUSTRIAL. ESPECIALIDAD ELECTRÓNICA BOLETÍN 2. CURSO 2003/04 1. Dado un decodificador de dos entradas (DEC 2:4), dar la descripción estructural, la descripción
Módulo de 16 entradas digitales modbus:
 Características principales: Módulo de 16 entradas digitales modbus: Rev Hard : 00 Versión Soft : 1,00 16 entradas bidireccionales ( 12 a 24Vcc ) aisladas. 16 contadores de 32 bits ascendentes con retención
Características principales: Módulo de 16 entradas digitales modbus: Rev Hard : 00 Versión Soft : 1,00 16 entradas bidireccionales ( 12 a 24Vcc ) aisladas. 16 contadores de 32 bits ascendentes con retención
MICROCONTROLADOR PIC DE MICROCHIP
 MICROCONTROLADOR PIC DE MICROCHIP PIC16F877-28-PIN 8-BIT CMOS FLASH MICROCONTROLLER PIC16F877: ESTRUCTURA INTERNA Bus de Datos Bus de Datos (programa) Registro de trabajo (acumulador) Conversor A/D Contador/Temporizador
MICROCONTROLADOR PIC DE MICROCHIP PIC16F877-28-PIN 8-BIT CMOS FLASH MICROCONTROLLER PIC16F877: ESTRUCTURA INTERNA Bus de Datos Bus de Datos (programa) Registro de trabajo (acumulador) Conversor A/D Contador/Temporizador
Tema 0. Introducción a los computadores
 Tema 0 Introducción a los computadores 1 Definición de computador Introducción Máquina capaz de realizar de forma automática y en una secuencia programada cierto número de operaciones sobre unos datos
Tema 0 Introducción a los computadores 1 Definición de computador Introducción Máquina capaz de realizar de forma automática y en una secuencia programada cierto número de operaciones sobre unos datos
Tema 3: Expansión de recursos
 Sistemas Electrónicos Digitales II Tema 3: Expansión de recursos El bus I 2 C Protocolo de Comunicación I 2 C Índice de la Lección Introducción Características del bus I 2 C Conexión de dispositivos al
Sistemas Electrónicos Digitales II Tema 3: Expansión de recursos El bus I 2 C Protocolo de Comunicación I 2 C Índice de la Lección Introducción Características del bus I 2 C Conexión de dispositivos al
EVOLUCIÓN HISTÓRICA DE LOS µp
 EVOLUCIÓN HISTÓRICA DE LOS µp El primer procesador fue inventado por los Babilonios en el año 500 ac En 1642 se perfeccionó la primera calculadora por Blas Pascal A mediados del siglo pasado se inventaron
EVOLUCIÓN HISTÓRICA DE LOS µp El primer procesador fue inventado por los Babilonios en el año 500 ac En 1642 se perfeccionó la primera calculadora por Blas Pascal A mediados del siglo pasado se inventaron
MÓDULO Nº7 REGISTROS Y CONTADORES
 MÓDULO Nº7 REGISTROS Y CONTADORES UNIDAD: LÓGICA SECUENCIAL TEMAS: Registros. Contadores. OBJETIVOS: Explicar que es un registro, su clasificación y sus principales características. Explicar que es un
MÓDULO Nº7 REGISTROS Y CONTADORES UNIDAD: LÓGICA SECUENCIAL TEMAS: Registros. Contadores. OBJETIVOS: Explicar que es un registro, su clasificación y sus principales características. Explicar que es un
4.7 Aplicaciones usando la tarjeta Spartan 3E
 4.7 Aplicaciones usando la tarjeta Spartan 3E USO DE LOS PERIFERICOS DEL SISTEMA DE DESARROLLO SPARTAN 3E Instructor: MC. Rodrigo Lucio Maya Ramírez Uso del LCD Operación escritura Operación lectura Inicialización
4.7 Aplicaciones usando la tarjeta Spartan 3E USO DE LOS PERIFERICOS DEL SISTEMA DE DESARROLLO SPARTAN 3E Instructor: MC. Rodrigo Lucio Maya Ramírez Uso del LCD Operación escritura Operación lectura Inicialización
Diseño de un sistema de adquisición de datos de un micrófono utilizando una FPGA
 Diseño de un sistema de adquisición de datos de un micrófono utilizando una FPGA Experimental III: Introducción a la Microfabricación y FPGA - Instituto Balseiro Mauricio Tosi Diciembre de 2013 Resumen
Diseño de un sistema de adquisición de datos de un micrófono utilizando una FPGA Experimental III: Introducción a la Microfabricación y FPGA - Instituto Balseiro Mauricio Tosi Diciembre de 2013 Resumen
Interface paralelo programable 8255.
 Interface paralelo programable 8255. 1 Comunicaciones paralelo. CARACTERÍSTICAS Transferencia simultánea de bits por líneas separadas Ventaja: frecuencias de transmisión mayores Desventaja: el coste de
Interface paralelo programable 8255. 1 Comunicaciones paralelo. CARACTERÍSTICAS Transferencia simultánea de bits por líneas separadas Ventaja: frecuencias de transmisión mayores Desventaja: el coste de
Memorias. Docente: Ing. Víctor Cárdenas Schweiger
 Memorias Docente: Ing. Víctor Cárdenas Schweiger 2016 1 Qué es una memoria RAM? Es la memoria donde se almacenan los datos (programas) con los que se están trabajando en ese momento. Es un dispositivo
Memorias Docente: Ing. Víctor Cárdenas Schweiger 2016 1 Qué es una memoria RAM? Es la memoria donde se almacenan los datos (programas) con los que se están trabajando en ese momento. Es un dispositivo
TEMA 2: MICROPROCESADORES Y MICROCONTROLADORES
 12/31/2011 1 TEMA 2: MICROPROCESADORES Y MICROCONTROLADORES Sistemas Digitales basados en Microprocesador Grado en Ingeniería Telemática Raúl Sánchez Reíllo Sistemas Digitales Basados en Microprocesador
12/31/2011 1 TEMA 2: MICROPROCESADORES Y MICROCONTROLADORES Sistemas Digitales basados en Microprocesador Grado en Ingeniería Telemática Raúl Sánchez Reíllo Sistemas Digitales Basados en Microprocesador
La Unidad de Memoria y su
 La Unidad Memoria y su conexión n al µp Forma en el que el µp realiza una operación escritura A15-A0 µp µp D7-D0 3 3 1 1 2 2 Chip Memoria MEM Bus Direcciones 16 16 bits bits Bus Datos Decodificación Decodificación
La Unidad Memoria y su conexión n al µp Forma en el que el µp realiza una operación escritura A15-A0 µp µp D7-D0 3 3 1 1 2 2 Chip Memoria MEM Bus Direcciones 16 16 bits bits Bus Datos Decodificación Decodificación
Sincronismo de Canales
 Sincronismo de Canales Los protocolos de transferencia de información en canales de microprocesadores, se pueden clasificar en tres grupos: 1. Sincrónicos: transferencias sincronizadas, una transferencia
Sincronismo de Canales Los protocolos de transferencia de información en canales de microprocesadores, se pueden clasificar en tres grupos: 1. Sincrónicos: transferencias sincronizadas, una transferencia
Bus I 2 C. Introducción
 Bus I 2 C Introducción 1980: Philips desarrolla el Bus de 2 alambres I 2 C para la comunicación de circuitos integrados. Se han otorgado licencias a mas de 50 compañías, encontrándonos con más de 1000
Bus I 2 C Introducción 1980: Philips desarrolla el Bus de 2 alambres I 2 C para la comunicación de circuitos integrados. Se han otorgado licencias a mas de 50 compañías, encontrándonos con más de 1000
Curso sobre Microcontroladores Familia HC9S08 de Freescale
 Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
Curso sobre Microcontroladores Familia HC9S08 de Freescale Por Ing. Daniel Di Lella EduDevices www.edudevices.com.ar e-mail: info@edudevices.com.ar Capítulo 8.- Inter Integrated Circuit Interface I2C MMIIC
Microprocesadores, microcontroladores, memorias
 Microprocesadores, microcontroladores, memorias Conceptos de procesamiento de datos Arquitectura de computadores Se presenta a continuación un esquema en bloques de un sistema básico de un computador y
Microprocesadores, microcontroladores, memorias Conceptos de procesamiento de datos Arquitectura de computadores Se presenta a continuación un esquema en bloques de un sistema básico de un computador y
Contenidos. Arquitectura de ordenadores (fundamentos teóricos) Elementos de un ordenador. Periféricos
 Elementos de un ordenador. Periféricos") Arquitectura de ordenadores (fundamentos teóricos) Representación de la información Estructura de un microprocesador Memorias Sistemas de E/S Elementos de un ordenador Microprocesador Placa base Chipset
Arquitectura de ordenadores (fundamentos teóricos) Representación de la información Estructura de un microprocesador Memorias Sistemas de E/S Elementos de un ordenador Microprocesador Placa base Chipset
ARQUITECTURA DE LAS COMPUTADORAS FLIP-FLOP
 RUITECTUR DE LS COMPUTDORS FLIP-FLOP Un flip-flop es un elemento de memoria que almacena bits (tensiones altas y bajas), a diferencia de las compuertas que son elementos de toma de decisión. CLSIFICCIÓN:
RUITECTUR DE LS COMPUTDORS FLIP-FLOP Un flip-flop es un elemento de memoria que almacena bits (tensiones altas y bajas), a diferencia de las compuertas que son elementos de toma de decisión. CLSIFICCIÓN:
Lógica Digital. Circuitos Secuenciales. Francisco García Eijó. Organización del Computador I Departamento de Computación - FCEyN UBA
 Lógica Digital Circuitos Secuenciales Francisco García Eijó Organización del Computador I Departamento de Computación - FCEyN UBA 5 de Abril del 2016 Agenda 1 Repaso 2 Introducción 3 Flip-Flops 4 Ejercicios
Lógica Digital Circuitos Secuenciales Francisco García Eijó Organización del Computador I Departamento de Computación - FCEyN UBA 5 de Abril del 2016 Agenda 1 Repaso 2 Introducción 3 Flip-Flops 4 Ejercicios
Práctica No. 6 del Curso "Meteorología y Transductores". "Convertidores ADC y DAC"
 Objetivos. Práctica No. 6 del Curso "Meteorología y Transductores". "Convertidores ADC y DAC" Comprobar por medio de simulaciones el funcionamiento de los convertidores analógico digital (ADC) y el digital
Objetivos. Práctica No. 6 del Curso "Meteorología y Transductores". "Convertidores ADC y DAC" Comprobar por medio de simulaciones el funcionamiento de los convertidores analógico digital (ADC) y el digital
TEMA 2: Organización de computadores
 TEMA 2: Organización de computadores Procesadores Memorias Dispositivos de E/S 1 Computador Procesador, memoria, dispositivos de E/S CPU Unidad de control Unidad aritmética y lógica Registros Dispositivos
TEMA 2: Organización de computadores Procesadores Memorias Dispositivos de E/S 1 Computador Procesador, memoria, dispositivos de E/S CPU Unidad de control Unidad aritmética y lógica Registros Dispositivos
ESTRUCTURA. Estructura básica de un computador ESTRUCTURA BÁSICA DE UN COMPUTADOR RELOJ. Unidad de control CPU ULA. Onda cuadrada RELOJ
 ESTRUCTURA BÁSICA DE UN COMPUTADOR RELOJ ESTRUCTURA CPU RELOJ MEMORIA ULA BUSES Unidad de control ULA Onda cuadrada Interna o principal Secundaria Banco de registros Operador (ALU) Reg. estados (Flags)
ESTRUCTURA BÁSICA DE UN COMPUTADOR RELOJ ESTRUCTURA CPU RELOJ MEMORIA ULA BUSES Unidad de control ULA Onda cuadrada Interna o principal Secundaria Banco de registros Operador (ALU) Reg. estados (Flags)
ING. JONATHAN QUIROGA TINOCO. Desarrollado por Ing. Jonathan Quiroga T.
 ING. JONATHAN QUIROGA TINOCO PARTE I CONCEPTOS BÁSICOS Los participantes identificarán la estructura interna y externa de un PLC siguiendo los lineamientos dadas por el fabricante. Definición de PLC Es
ING. JONATHAN QUIROGA TINOCO PARTE I CONCEPTOS BÁSICOS Los participantes identificarán la estructura interna y externa de un PLC siguiendo los lineamientos dadas por el fabricante. Definición de PLC Es
ARQUITECTURA DE LOS SISTEMAS BASADOS EN MICROPROCESADOR
 ARQUITECTURA DE LOS SISTEMAS BASADOS EN MICROPROCESADOR Historia Bloques funcionales Dimensionamiento Estructura CPU Concepto de programa Interrupciones Buses Entrada / Salida Ejemplo de arquitectura:
ARQUITECTURA DE LOS SISTEMAS BASADOS EN MICROPROCESADOR Historia Bloques funcionales Dimensionamiento Estructura CPU Concepto de programa Interrupciones Buses Entrada / Salida Ejemplo de arquitectura:
Señales de interfase del Z80
 Señales de interfase del Z80 El microprocesador Z80 está integrado en una pastilla de 40 pines. Estos terminales pueden agruparse funcionalmente como muestra la figura: Bus de direcciones El bus de direcciones
Señales de interfase del Z80 El microprocesador Z80 está integrado en una pastilla de 40 pines. Estos terminales pueden agruparse funcionalmente como muestra la figura: Bus de direcciones El bus de direcciones
Microprocesadores, Tema 8:
 Microprocesadores, Tema 8: Periféricos de Comunicación Síncronos Guillermo Carpintero Marta Ruiz Universidad Carlos III de Madrid Standard de Comunicación Protocolos Standard de Comunicación Serie Síncrona
Microprocesadores, Tema 8: Periféricos de Comunicación Síncronos Guillermo Carpintero Marta Ruiz Universidad Carlos III de Madrid Standard de Comunicación Protocolos Standard de Comunicación Serie Síncrona
Se trata de generar una señal PWM que salga por PB7, el cual está vinculado al canal 2 del TIM4. Por lo tanto la configuración será como sigue:
 No se permiten ni libros, ni apuntes, ni calculadoras programables. Sólo se permite el manual del microcontrolador Se contestará sólo en el espacio reservado al efecto, pudiendo utilizar la cara posterior
No se permiten ni libros, ni apuntes, ni calculadoras programables. Sólo se permite el manual del microcontrolador Se contestará sólo en el espacio reservado al efecto, pudiendo utilizar la cara posterior
Anexo II: Lógica programada y lógica cableada. Ventajas e inconvenientes. MSP430G2553.
 Anexo II: Lógica programada y lógica cableada. Ventajas e inconvenientes. MSP430G2553. 1. Introducción Como se observa a lo largo de este proyecto, en casi todas las tarjetas esclavo recurrimos a usar
Anexo II: Lógica programada y lógica cableada. Ventajas e inconvenientes. MSP430G2553. 1. Introducción Como se observa a lo largo de este proyecto, en casi todas las tarjetas esclavo recurrimos a usar
Mapas de Memoria y E/S
 Mapas de Memoria y E/S Sistemas con Microprocesadores http://www.herrera.unt.edu.ar/procesadores Conexiones internas del CPU08 Dentro del mc el CPU08 se vincula con memoria y con los dispositivos de E/S
Mapas de Memoria y E/S Sistemas con Microprocesadores http://www.herrera.unt.edu.ar/procesadores Conexiones internas del CPU08 Dentro del mc el CPU08 se vincula con memoria y con los dispositivos de E/S
Informática. Informática = Hardware + Software. Hardware + Software. Hardware = Parte física. Software = Parte lógica
 Informática Hardware + Software Informática = Hardware + Software Hardware = Parte física Software = Parte lógica 1 Hardware ELEMENTOS DE UN ORDENADOR CPU (microprocesador) Unidad aritmético-lógica Unidad
Informática Hardware + Software Informática = Hardware + Software Hardware = Parte física Software = Parte lógica 1 Hardware ELEMENTOS DE UN ORDENADOR CPU (microprocesador) Unidad aritmético-lógica Unidad
Preguntas claves (y sus respuestas)
") 1 Preguntas claves (y sus respuestas) Qué es un microprocesador? Es un Circuito Integrado Secuencial Síncrono Qué necesita para funcionar? Qué hace? Para qué? Una tensión continua estable (5V, 3.3V, 2.5V,
1 Preguntas claves (y sus respuestas) Qué es un microprocesador? Es un Circuito Integrado Secuencial Síncrono Qué necesita para funcionar? Qué hace? Para qué? Una tensión continua estable (5V, 3.3V, 2.5V,
I2C. Ing. Pablo Martín Gomez pgomez@fi.uba.ar
 I2C Ing. Pablo Martín Gomez pgomez@fi.uba.ar 1 Comunicaciones en un bus serie 2 Comunicaciones en un bus serie 3 I²C Velocidad 4 UART Universal Asynchronous Receiver Transmitter Estándar de comunicación
I2C Ing. Pablo Martín Gomez pgomez@fi.uba.ar 1 Comunicaciones en un bus serie 2 Comunicaciones en un bus serie 3 I²C Velocidad 4 UART Universal Asynchronous Receiver Transmitter Estándar de comunicación
VHDL. Carlos Andrés Luna Vázquez. Lección 10 Problemas
 Carlos Andrés Luna Vázquez Lección 10 Problemas 1 Índice Introducción Niveles de abstracción del modelado con HDL Estilos descriptivos del modelado con HDL Ventajas y limitaciones de los HDLs El lenguaje
Carlos Andrés Luna Vázquez Lección 10 Problemas 1 Índice Introducción Niveles de abstracción del modelado con HDL Estilos descriptivos del modelado con HDL Ventajas y limitaciones de los HDLs El lenguaje
10. Tarjeta analógica multipropósito
 10. Tarjeta analógica multipropósito 10.1. Características Esta tarjeta se ha diseñado con el fin de ofrecer una solución completa a aplicaciones donde se requieran entradas y salidas analógicas, donde
10. Tarjeta analógica multipropósito 10.1. Características Esta tarjeta se ha diseñado con el fin de ofrecer una solución completa a aplicaciones donde se requieran entradas y salidas analógicas, donde
IM : ARDUINO NANO OEM
 IM130615004: ARDUINO NANO OEM NIVEL DE ENTRADA Básico Estas placas y módulos son los mejores para iniciar a programar un micro-controlador Descripción Arduino Nano es una pequeña placa basada en el ATmega328
IM130615004: ARDUINO NANO OEM NIVEL DE ENTRADA Básico Estas placas y módulos son los mejores para iniciar a programar un micro-controlador Descripción Arduino Nano es una pequeña placa basada en el ATmega328
PIC MICRO ESTUDIO Reloj en tiempo real RTCU2 Clave: 719 www.electronicaestudio.com
 PIC MICRO ESTUDIO Reloj en tiempo real RTCU2 Clave: 719 www.electronicaestudio.com Guía de Operación Reloj en tiempo real Modulo: RTCU2iempo real Clave: 719 El modulo 719 Reloj en tiempo real- utiliza
PIC MICRO ESTUDIO Reloj en tiempo real RTCU2 Clave: 719 www.electronicaestudio.com Guía de Operación Reloj en tiempo real Modulo: RTCU2iempo real Clave: 719 El modulo 719 Reloj en tiempo real- utiliza
UPMDIE. 2 - Sistemas embebidos INDUSTRIALES. Sistemas embebidos CPU, Memorias, dispositivos de E/S y buses Sistema microprocesador ejemplo: Arduino
 cei@upm.es 2 - Sistemas embebidos Sistemas embebidos CPU, Memorias, dispositivos de E/S y buses Sistema microprocesador ejemplo: Arduino Universidad Politécnica de Madrid Sistemas embebidos Qué es un sistema
cei@upm.es 2 - Sistemas embebidos Sistemas embebidos CPU, Memorias, dispositivos de E/S y buses Sistema microprocesador ejemplo: Arduino Universidad Politécnica de Madrid Sistemas embebidos Qué es un sistema
Memoria 24LC256 I. I NTRODUCCIÓN
 1 Memoria 24LC256 I. I NTRODUCCIÓN I2C es un bus de comunicación serial sincrónica desarrollado por Phillips Semiconductors a principios de los años 80 s, con la principal intención de interconectar una
1 Memoria 24LC256 I. I NTRODUCCIÓN I2C es un bus de comunicación serial sincrónica desarrollado por Phillips Semiconductors a principios de los años 80 s, con la principal intención de interconectar una
Repaso Registros internos Z80 1/37
 Repaso Registros internos Z80 1/37 Repaso Formato instrucciones Formato con 4 direcciones Acumulador: A A op oper2 PC: Program Counter dirección de la próxima instrucción Instrucciones de operación Código
Repaso Registros internos Z80 1/37 Repaso Formato instrucciones Formato con 4 direcciones Acumulador: A A op oper2 PC: Program Counter dirección de la próxima instrucción Instrucciones de operación Código
Comunicaciones Digitales: Protocolos seriales (uc)
") Comunicaciones Digitales: Protocolos seriales (uc) Qué es la comunicación serial? La comunicación serial es un protocolo de comunicación entre dispositivos que se incluye de manera estándar en prácticamente
Comunicaciones Digitales: Protocolos seriales (uc) Qué es la comunicación serial? La comunicación serial es un protocolo de comunicación entre dispositivos que se incluye de manera estándar en prácticamente
Práctica 7 - Microarquitectura del CPU
 Práctica 7 - Microarquitectura del CPU Organización del Computador 1 Primer cuatrimestre de 2012 Ejercicio 1 El siguiente esquema muestra algunos de los componentes de la microarquitectura de un modelo
Práctica 7 - Microarquitectura del CPU Organización del Computador 1 Primer cuatrimestre de 2012 Ejercicio 1 El siguiente esquema muestra algunos de los componentes de la microarquitectura de un modelo