Control de avance al encendido
|
|
|
- Enrique Muñoz San Martín
- hace 7 años
- Vistas:
Transcripción
1 Control de avance al encendido Diseño de microcontroladores Proyecto final Profesor: Alumno: Ing. José Juarez Kikot Pablo 1
2 INDICE _ Introducción 3 Funcionamiento básico de un motor 4 Encendido tradicional 4 Desarrollo proyecto 6 Diagrama en bloques 9 Descripción y funcionamiento (hardware) 11 Simulación y conclusión 14 Apéndice 1(cálculos realizados) 17 Apéndice 2 (Programación del PIC) 25 Apéndice 3 (datos importantes del microcontrolador utilizado) 31 2
3 Introducción: El propósito de este proyecto es controlar un sistema de encendido (avance o retardo en la chispa) de un motor de combustión interna de 4 cilindros para su óptimo funcionamiento independientemente del combustible utilizado (GNC o NAFTA). Este avance o retardo será dependiente de las rpm (revoluciones por minuto) del motor. Además este encendido contara con un corte eléctrico en el caso de que el motor este funcionando a un régimen muy alto de revoluciones, lo cual es muy peligroso para la vida útil del mismo. Para lograr los objetivos se usara un PIC16F877A, que será quien realice los cálculos y comandará una etapa de potencia que a la ves manejara el sistema de alta tensión del automóvil. 3
4 Funcionamiento de un motor: En la siguiente figura se observa cada uno de los 4 tiempos de funcionamiento de un motor. Como se observa la chispa que produce la explosión se da en el 3er tiempo Y es muy importante que se de en el momento justo, de esta forma aprovechando al máximo las propiedades explosivas del combustible. El encargado de que esta chispa se produzca en el momento preciso es el sistema de encendido. Sistema de encendido (tradicional): Básicamente el circuito de encendido utilizado en los motores de gasolina, es el encargado de hacer saltar una chispa eléctrica en el interior de los cilindros, para provocar la combustión de la mezcla aire-gasolina en el momento oportuno manejado por el ruptor. La encargada de generar una alta tensión para provocar la chispa eléctrica es "la bobina". La bobina es un transformador que convierte la tensión de batería 12 V. en una alta tensión del orden de V a V. Una vez generada esta alta tensión necesitamos un elemento que la distribuya a cada uno de los cilindros en el momento oportuno, teniendo en cuenta que los motores poli cilíndricos trabajan en un ciclo de funcionamiento con un orden de explosiones determinado para cada cilindro (ejemplo: motor de 4 cilindros orden de encendido: ). El elemento que se encarga de distribuir la alta tensión es el "distribuidor o delco". La alta tensión para provocar la chispa eléctrica en el interior de cada uno de los cilindros necesita de un elemento que es "la bujía", hay tantas bujías como numero de cilindros tiene el motor 4
5 Encendido tradicional El problema de usar distintos tipos de combustible: En teoría la chispa de encendido en un motor debe saltar cuando el cilindro llega al p.m.s. (punto muerto superior) en el final de la carrera de compresión, pero esto no pasa en la realidad, ya que, desde que salta la chispa hasta que se produce la combustión de la mezcla pasa un tiempo, este tiempo que pasa al producirse la combustión varia en cada tipo de combustible por ejemplo el GNC tiene un poder de explosión mucho menor que la nafta, lo que llevara mayor tiempo para que se produzca dicha combustión. Si esta pérdida de tiempo no la corregimos el motor bajara sus prestaciones (perdida de potencia). Ahí es donde entra en juego la corrección de avance o atraso del encendido. Si se esa usando GNC en un motor la chispa de la bujía tendría que producirse un momento antes (avance) para compensar el tiempo que le lleva la combustión. 5
6 Desarrollo del proyecto: Como ya se menciono anteriormente, al utilizar un combustible con poder explosivo distinto al tradicional, hay que corregir la puesta a punto del motor, esto se logra atrasando o avanzando el sistema de encendido (distribuidor). La siguiente imagen es de un distribuidor convencional. Un avance o atraso de un distribuidor físicamente significa girarlo en sentido horario o anti-horario, de esta forma el rotor ara contacto con la bujía un momento antes o después del pms. A continuación representaremos un avance físico de un distribuidor. 6
7 Este proyecto simula un atraso físico del distribuidor, mientras el mismo se encuentra funcionando con nafta, mediante una entrada del microcontrolador se dará aviso para que se implemente el retardo. Dentro del distribuidor se encuentra el platino (es una llave accionada por medio de una leva) a través del mismo se medirán las RPM s del motor, por medio de un capturador (que produce una interrupción en el microcontrolador). 12V bateria PLATINO R1 1k Entrada UC R2 1k En el momento que se recibe un impulso el controlador calculara el retardo necesario para generar la chispa en función de las RPM del motor este retardo deberá ser menor en un motor funcionando con GNC, ya que este combustible tardara mas en hacer dicha combustión. Además contara con un limitador de rpm para seguridad del motor. 7
8 En el siguiente esquema se observa en que parte del circuito estará funcionando el controlador. Entradas a utilizar: *_ Capturador de pulsos (producirá una interrupción) *_ Selector nafta/gnc Salidas a utilizar: *_ Pulsos para manejo de la bobina (comando para la etapa de potencia) *_ Indicador de limite de RPM *_Indicador modo nafta/gnc 8
9 Diagrama en bloques: Generador pulsos Interfase I/O Modo selector Bobina Interfase I/O Rutina de control Indicador modo nafta/gnc Indicador limite rpm Curva de retardo: La siguiente curva de retardo se logro realizando cálculos que se pueden observar en el apéndice 1. Equivale a un atraso de 20 grados (en teoría estos veinte grados son la corrección lógica para funcionar en nafta) en el distribuidor. 9
10 Para un régimen de giro menor a las 500 rpm el retardo se mantiene en 8ms, de otra forma esta curva tendería al infinito, para regimenes mayores a 6000 rpm el microcontrolador cesara el envío de pulsos a la etapa de potencia de esta forma no se producirán explosiones y el motor disminuirá su régimen de giro, protegiendo de esta forma al mismo. 10
, con unas mínimas reformas en el programa ya que este no cuenta con capturadores de entrada.")
11 Descripción placas: Principal: El microcontrolador usado fue el PIC16F877A puesto que ya contaba con uno en mí poder, de todas formas dado a la poca cantidad de entradas y salidas utilizadas se podría usar el 16F84 (que es de los más simples de la familia), con unas mínimas reformas en el programa ya que este no cuenta con capturadores de entrada. El datasheet del 16F877A se encuentra en el apéndice 3 A continuación una imagen a modo ilustrativo de lo que es la placa en la que esta montado el PIC. 11
12 Funcionamiento: Selector NAFA/GNC: ante un nivel alto en esta entrada se indica que el motor esta funcionando con GNC, por lo tanto no se implementa la rutina de retardo, (es como darle mas avance al encendido), en nivel bajo el motor funciona a NAFTA y el microcontrolador calcula el retardo a la salida. Entrada pulsos platino: el platino es una llave que cuando abre tendré tensión en la entrada, en el caso de que sierre pondrá esta entrada a masa, cuando el motor se encuentra en funcionamiento tendré algo parecido a una onda cuadrada con una frecuencia que varia con las RPM s del motor. Estos pulsos entran por RC2/CCP1 que es un capturador de entrada. Salida etapa de potencia: salida de pulsos (con retardo o no) que manejara la etapa de potencia, que a su vez disparara la bobina para tener la buscada chispa en cada cilindro 12
13 Etapa de potencia: Esta etapa se usa básicamente para disparar la bobina del auto por la cual circula una corriente de 3 amperes aproximadamente. Debido a la imposibilidad del PIC de manejar esa corriente se hace con esta etapa de potencia. El PIC dispara un transistor que a la ves dispara otro transistor (arreglo darlington) preparado para manejar mas potencia. Placa etapa de potencia 13

14 Simulación: Las siguientes imágenes son una simulación del funcionamiento del PIC. En el canal A tenemos los pulsos provenientes del platino, con los que se miden el régimen de giro del motor y además produce la interrupción para mandar la chispa al cilindro. En el canal C observamos la salida del micro controlador que comanda la etapa de potencia. Motor girando a 1200 RPM lo que equivale a 40 Hz (por los cálculos del apéndice 1) se observa el retardo en la salida. 14
 se observa que el pic no")
.")
15 Motor girando a 6000 RPM (200 Hz) se observa que el pic no envía mas pulsos a la etapa de potencia (corte de seguridad). 15
16 Conclusiones: La decisión de realizar este proyecto, se tomo antes de comenzar a cursar la materia diseño de microcontroladores, sin tener conocimiento de la forma de trabajo y programación de un microcontrolador. Con todas las dudas que surgían en ese momento parecía ser un proyecto difícil de realizar. Una vez cursada la materia y comenzando a trabajar en el mismo, no resulto tener la complejidad que en un primer momento suponía. La idea es seguir desarrollando este proyecto controlando más variables y sumarle un display entre otras cosas, ya que el problema de la puesta a punto de un automóvil que funciona con GNC es real y muy evidente. Por problemas con la etapa de potencia no se pudo hacer funcionar dentro del automóvil (luego de quemar varios transistores probando), pero eso ya es un problema de electrónica que lamentablemente me faltan conocimientos para solucionarlo, de todas formas seguiré desarrollando le mismo hasta lograr tenerlo funcionando. 16
17 APENDICE 1 : Para calcular la frecuencia en la que vamos a estar trabajando primero tenemos que saber que un motor 4 tiempos de un cilindro hace una explosión cada dos vueltas del cigüeñal, por lo tanto si pensamos en un motor de 4 cilindros tendremos 2 chispas por vuelta del motor. Nos da el siguiente grafico: F=(2xRPM)/60s Grafico 1 El siguiente paso es calcular que retardo significa un movimiento de 20 grados del distribuidor (que es una pieza que gira por lo tanto estamos hablando de velocidad angular). En el siguiente grafico observamos que estamos hablando de una velocidad angular. 17
18 Primer calculamos el retardo en funcion de las RPM: RPM s 20/ xs(retardo) Retardo=3.333/RPM Si lo graficamos nos da la siguiente curva: Grafico2 Como vamos a trabajar con frecuencia calcularemos el retardo en función de la frecuencia: Retardo=3.333/RPM RPM=(f*60)/2 18
19 Obtenemos otra curva: Retardo=(3.33*2)/(f*60) Grafico 3 Ahora procederemos a calcular con el micro frecuencia de la señal que proviene del distribuidor para luego poder calcular el retardo. Es muy importante saber con que cristal trabajara el micro controlador (en este proyecto se usara un cristal de 20Mhz) también es importante saber que el PIC dispone de un preescalador para poder manejar el tiempo de incremento del timer. Con un preescalado de 1 el timer se incrementara cada Fosc/4, en nuestro caso el preescalador se usara en 1/8 por lo tanto el timer se incrementara cada Fosc/(4*8). Luego de hacer estos cálculos pasaremos a hablar de retardo en función del nuecero de cuentas que realizo el timer. Fcristal/4*8=frecuencia de incrementacion de timer (la inversa de este resultado nos dará cada cuanto tiempo se incrementa) 20exp6/(4*8)=625khz 1/625 khz=1.6 us Si sabemos que P(periodo)=1/f, si dividimos el P de la señal entrante por el P del timer obtendremos el numero de cuentas en función de la frecuencia de entrada. Pplat/Ptim=(1/f)/1,6 us=nª cuentas timer 19
20 Nos da el siguiente grafico: Grafico 4 Ahora buscaremos el grafico de retardo en función del número de cuentas. Retardo=(3.33*2)/(f*60)=0.1111/f Numero de cuentas=1/(1.6us*f) Ret=0.1111*1.6us*numero de cuentas Ret= us * numero de cuentas 20
21 Con lo que finalmente llegamos a un resultado lineal: Grafico 5 Rutina de retardo en un micro: La siguiente es una rutina de dos ciclos anidados para generar un retardo pau MOVLW N ;(1) Carga dato N MOVWF cont1 ;(1) inicializa contador1 ciclo externo rep1 MOVLW M ;(1) Carga dato M MOVWF cont2 ;(1) inicializa contador2 ciclo interno rep2 DECFSZ cont2,1 ;(1,2)Decrementa contador2 y escapa si cero GOTO rep2 ;(2) si no es cero, repite ciclo interno DECFSZ cont1,1 ;(1,2)Decrementa contador1 y escapa si cero GOTO rep1 ;(2) si no es cero repite ciclo externo La duración de esa rutina será de: T=[N*(3*M+4)+7]Tcy Tcy=(1/20e6)*4= 0.2us 21
22 Para manejar solo una variable al generar el retardo se le da el valor 255 a la variable M, de esta forma se esa discretizando el retardo generado por la rutina, lo que producirá un error máximo de 0.15ms que se puede despreciar. Así la rutina de retardo será: T=(N*769+7)*Tcy Ahora se puede relacionar el numero de cuentas con el numero N. Ret= us * numero de cuentas Ret =(N*769+7)*Tcy N={[( us * numero de cuentas) / Tcy]-7} / 769 Lo que nos da el siguiente grafico: Grafico 6 Dado que el microcontrolador dispone de muy pocas instrucciones y este cálculo de retardo se hace entre chispa y chispa del motor hay que hacerlo lo más rápido posible hay que hacer varias aproximaciones y algunos términos que no tienen mucho peso sobre el resultado final podrán ser obviados: 22
23 Timer: el timer que se uso en este proyecto es de 16 bits. Una de las aproximaciones será usar solo la parte alta del mismo. Variable N: si desarrollamos el calculo de N={[( us * numero de cuentas) / Tcy]-7} / 769 Llegamos a que, N= 1.156e-3 *numero de cuentas Ya que N es un número entero el numero puede ser obviado, una buena aproximación de la ecuación anterior podría ser: N=numero de cuentas/800 Con todas estas aproximaciones llegamos a la curva final de retardo en función de RPM: Grafico 7 23
24 El siguiente grafico muestra el error total del cálculo de retardo, relacionando el grafico 2 con el grafico 7. Error(RPM)=retardo(RPM)-retardodiscretizado(RPM) Grafico 8 24
25 APENDICE 2 : Diagrama de flujo del programa: El programa principal solo espera que ocurra una interrupción por captura de entrada. El siguiente diagrama de flujos describe lo que ocurre en la interrupción. 25
26 26
27 Programa para encendido electrónico: En esta primer parte se declaran variables y configuran puertos y algunos módulos. RC2/CCP1: se configura como entrada T1CON: configura el timer 1 como temporizador preescalado 1/8. CCP1CON: se lo configura para captura en flanco descendente. INTCON: se habilitan interrupciones de periféricos. ;*************************************************************************** ;************Alumno: Pablo Kikot********************************************* ;************proyecto: Retardo elecronico encendido para motores con GNC************ ;*************************************************************************** Include "p16f877.inc" msnib EQU 0x20 lsnib EQU 0x21 STATUS_temp EQU 0x40 W_temp EQU 0x41 cont1 EQU 0x25 cont2 EQU 0x26 num1 EQU 0x27 num2 EQU 0x28 N EQU 0x29 cuenta EQU 0x30 limrpm EQU 0x31 M EQU 0x32 org 0x0000 ;inicia con un reset GOTO Inc org 0x0004 ;vector de interrupción GOTO interr ;salta a la rutina de atención a la interrupción inic BSF STATUS,RP0 ;Banco1 BCF TRISC,0 ;patita RC0 como salida BCF TRISB,0 ;patita RB0 como salida BSF TRISB,1 ;patita RB1 como entrada BSF TRISC,2 ;patita RC2/CCP1 como entrada BCF STATUS,RP0 ;Banco 0 MOVLW 0x31 MOVWF T1CON ;Configura Timer1 modo temporizador, preesc 1/8 CLRF TMR1H ;Inicializa en cero el timer 1 CLRF TMR1L ; CLRF CCP1CON ;limpia latch de CCP1 BSF CCP1CON,CCP1M2 ;Habilita CCP1 para captura en transición bajada BCF PIR1,CCP1IF ;limpia bandera de interrupción. BSF STATUS,RP0 ;banco 1 BSF PIE1,CCP1IE ;Habilita interrupciones del CCP1 BCF STATUS,RP0 ;banco 0 BSF INTCON,PEIE ;habilita interrupciones de periféricos BSF INTCON,GIE ;Habilita interrupciones globales 27
28 El programa principal se encuentra esperando una interrupción, no realiza ningún trabajo. ;** Programa principal:**************************************************************************** main GOTO main ;repite Rutina de interrupción: En el momento que se produce una interrupción lo primero que hace es chequear que sea una interrupción por el capturador CCP1 (mira el flag CCP1F), si no es así sale de la interrupción. Si la interrupción fue por captura, guarda en la variable cuenta la parte alta del contador (ya que es de 16 bits), luego lo compara con un valor predeterminado para ver si se pasó del límite de RPM. En caso de pasarse de RPM sale de la interrupción (no hay pulso de salida en el puerto C,0). En el caso de no exceder las RPM, compara que no este por encima de las 5200 RPM ni por debajo de las 500RPM (si se encuentra en uno de estos extremos el retardo será fijo de 0.6mseg y 7.9mseg respectivamente). Una vez que chequeo que esta dentro del rango de RPM, pasa a la subrutina donde calcula el retardo para el número de cuentas capturado. Por ultimo, una vez que se conoce el tiempo que hay que esperar, salta a una subrutina donde espera el tiempo dado, para luego mandar el pulso de salida por el puerto C,0 y así volver de la interrupción y esperar a la nueva captura. 28
29 ;***** rutina de atención a la interrupción********************************************************************** interr BCF STATUS,RP0 ;banco 0 ;MOVWF W_temp ;salva contexto SWAPF STATUS,W CLRF STATUS MOVWF STATUS_temp BTFSS PIR1,CCP1IF ;miro bandera de captura de evento GOTO ret ;si no es bandera de captura retorna BCF PIR1,CCP1IF ;si es bandera de captura, la limpia clrw clrf cuenta MOVF CCPR1H,W ;copia periodo capturado MOVWF cuenta ;copio el periodo para luego calcular retardo CLRF TMR1L ;limpia la cuenta del timer 1 CLRF TMR1H movf cuenta,w ;***acá miro limite de RPM (6000rpm=200hz)***** SUBLW 0x0C ;resto a p. alta del p..rpm=30/(tmr1h*1.6 useg) BTFSC STATUS,0 ;me fijo si la cuenta anterior dio negativo goto ret ;se paso de rpm no tiro chispa BTFSC PORTB,1 ;****miro si esta en cero entrada RB1******** GOTO GNC ;si es uno salto a GNC (no uso retardo) movlw 0xff ;en este programa num1 siempre vale ff movwf num1 movlw 0x0E ;****miro si esta en el limite superior de retardo**** SUBWF cuenta,0 ;le resto x a la parte alta del periodo capturado BTFSC STATUS,0 ;me fijo si la cuenta anterior dio negativo escapa si =0 goto aaa ;si da negativono estoy en el limite movlw 0x03 ;si da positivo ret=0.6mseg MOVWF num2 MOVWF cont2 goto na aaa movlw 0x95 ; **miro si esta en el limite inferior de retardo******* SUBWF cuenta,0 ;le resto x a la parte alta del periodo capturado BTFSS STATUS,0 ;miro si dio negativo escapa si=1 goto no ;si da positivo calc ret movlw 0x33 ;negativo...re máximo=7.9mseg MOVWF num2 MOVWF cont2 GOTO na no CALL retardo ;****subrutina donde calculo retardo************ na CALL pausa ;****implemento retardo calculado************* GNC BCF PORTC,0 ;salida= CHISPA CALL pau ;duración de la chispa(1.5 mseg) BSF PORTC,0 ;corto salida ret BCF STATUS,RP0 ;Banco 0 SWAPF STATUS_temp,W ;restablece contexto MOVWF STATUS SWAPF W_temp,F SWAPF W_temp,W RETFIE ;************************************************************ ;****** Subrutina de pausa de aprox. 30 µseg (con Fosc=20 MHZ)****** ;************************************************************ pausa MOVF num2,w ;Cargo en cont2 el numero de ciclos MOVWF cont2 ;secundarios guardados en num2 rep1 MOVF num1,w ;Cargo en cont1 el numero de ciclos MOVWF cont1 ;primarios guardados en num1 rep2 DECFSZ cont1,1 ;Decrementa contador 1 y escapa si cero GOTO rep2 ;si no es cero, repite ciclo interno DECFSZ cont2,1 ;Decrementa contador 2 y escapa si cero GOTO rep1 ;si no es cero repite ciclo externo RETURN ;regresa de esta subrutina 29
30 ;************************************************************************************************ ;********************** Subrutina de pausa de aprox. 150 µseg (con Fosc=20 MHZ)************************* ;************************************************************************************************ pau MOVLW 0X0A MOVWF M ciclo1 MOVLW 0xFF ;Cargo en cont2 el numero de ciclos MOVWF N ;secundarios guardados en num2 ciclo DECFSZ N,1 ;Decrementa contador2 y escapa si cero GOTO ciclo ;si no es cero, repite ciclo interno DECFSZ M,1 GOTO ciclo1 RETURN ;regresa de esta subrutina ;************************************************************************************************ ;*************En esta rutina calculo el retardo de acuerdo a las rpm que esta giirando el motor******************* ;************************************************************************************************ retardo clrw CLRF num2 bcf STATUS,0 INCF num2,1 movf cuenta,w BTFSS STATUS,0 ;me fijo si la cuenta anterior dio negativo goto cic movlw 0x03 neg SUBWF cuenta,1 ;le resto 03 a cuenta escapa si es cero BTFSS STATUS,0 ;me fijo si la cuenta anterior dio negativo goto cic INCF num2,1 goto neg cic movlw 0x03 bcf STATUS,0 SUBWF cuenta,1 ;le resto 03 a cuenta escapa si es cero BTFSS STATUS,0 ;me fijo si la cuenta anterior dio negativo GOTO listo INCF num2,1 GOTO cic listo BSF STATUS,RP0 clrf STATUS RETURN End 30
31 APENDICE 3 : Algunos datos importantes del PIC16F877: 31
32 32
33 33
34 34
35 35
36 Toda la información referida al microcontrolador PIC16F877A, y su respectivo datasheet fue obtenido de la página del fabricante: Los gráficos que describen el funcionamiento de un motor fueron obtenidos de la página: Sobre como realizar un proyecto en un pic: Autores: Enrique Palacios. Fernando Ramiro. Lucas López. 36
Practica de PIC 16F84
 Practica de PIC 16F84 Los PIC son circuitos que pueden controlar dispositivos y diferentes sistemas, son como los PLC (controles lógico programable), además debo decir que es un circuito que tiene todas
Practica de PIC 16F84 Los PIC son circuitos que pueden controlar dispositivos y diferentes sistemas, son como los PLC (controles lógico programable), además debo decir que es un circuito que tiene todas
Bucles: o Bucles infinitos o Bucles finitos o Bucles anidados Medir tiempos con MPLAB Ejemplos y ejercicios
 SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 3: Bucles Bucles: o Bucles infinitos o Bucles finitos o Bucles anidados Medir tiempos con MPLAB Ejemplos y ejercicios -
SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 3: Bucles Bucles: o Bucles infinitos o Bucles finitos o Bucles anidados Medir tiempos con MPLAB Ejemplos y ejercicios -
Programa del PIC 16F877A
 APÉNDICE B Programa del PIC 16F877A ;* "CONTROL AUTOMÁTICO DE VELOCIDAD VEHICULAR". * ;* EL PRESENTE PROGRAMA TIENE COMO FINALIDAD CONTROLAR LA VELOCIDAD DEL * ;* VEHÍCULO, DEPENDIENDO DE LA SEÑAL RECIBIDA
APÉNDICE B Programa del PIC 16F877A ;* "CONTROL AUTOMÁTICO DE VELOCIDAD VEHICULAR". * ;* EL PRESENTE PROGRAMA TIENE COMO FINALIDAD CONTROLAR LA VELOCIDAD DEL * ;* VEHÍCULO, DEPENDIENDO DE LA SEÑAL RECIBIDA
Jesús Alberto Díaz Carmona Ingeniería en Informática. Curso 2005/06. Diseño de Sistemas Basados en Microprocesador
 Jesús Alberto Díaz Carmona Ingeniería en Informática. Curso 2005/06. Diseño de Sistemas Basados en Microprocesador Descripción El proyecto se trata de un sistema de cámaras de vigilancia en circuito cerrado,
Jesús Alberto Díaz Carmona Ingeniería en Informática. Curso 2005/06. Diseño de Sistemas Basados en Microprocesador Descripción El proyecto se trata de un sistema de cámaras de vigilancia en circuito cerrado,
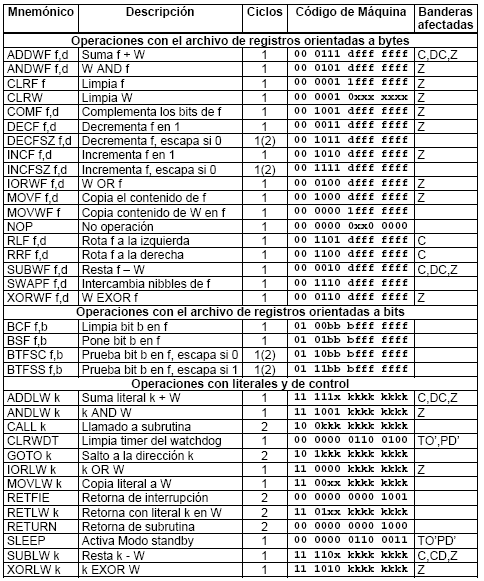
Las Instrucciones. A continuación vamos a presentar el conjunto de instrucciones básico de los Microcontroladores Picmicro.
 Las Instrucciones A continuación vamos a presentar el conjunto de instrucciones básico de los Microcontroladores Picmicro. En general la instrucciones de los microcontroladores pueden clasificarse como:
Las Instrucciones A continuación vamos a presentar el conjunto de instrucciones básico de los Microcontroladores Picmicro. En general la instrucciones de los microcontroladores pueden clasificarse como:
1. Proponer un circuito que tenga el puerto b como salida conectando 8 leds, realizando un programa que me encienda los bits 0, 1, 3, 5, 7.
 1. Proponer un circuito que tenga el puerto b como salida conectando 8 leds, realizando un programa que me encienda los bits 0, 1, 3, 5, 7. a. Diagrama de flujo b. Circuito C1 4 MHZ C2 R2 10k 16 15 4 R1
1. Proponer un circuito que tenga el puerto b como salida conectando 8 leds, realizando un programa que me encienda los bits 0, 1, 3, 5, 7. a. Diagrama de flujo b. Circuito C1 4 MHZ C2 R2 10k 16 15 4 R1
Capítulo VIII: PROGRAMACIÓN DEL PIC 16F876A
 Capítulo VIII: PROGRAMACIÓN DEL PIC 16F876A Proyecto Fin de Carrera 95 Antonio Andújar Caballero 8. PROGRAMACIÓN DEL PIC 16F876A. A la hora de realizar el programa de control para nuestro ecualizador,
Capítulo VIII: PROGRAMACIÓN DEL PIC 16F876A Proyecto Fin de Carrera 95 Antonio Andújar Caballero 8. PROGRAMACIÓN DEL PIC 16F876A. A la hora de realizar el programa de control para nuestro ecualizador,
Instrucciones para programar el PIC16F877
 Instrucciones para programar el PIC16F877 2 Estos microcontroladores responden a una serie de instrucciones o códigos que se deben grabar en su memoria de programa, en total son 35. A continuación se encuentra
Instrucciones para programar el PIC16F877 2 Estos microcontroladores responden a una serie de instrucciones o códigos que se deben grabar en su memoria de programa, en total son 35. A continuación se encuentra
17 Con el chorro de agua pequeño, la cubeta se llena en 10 minutos
 17 Con el chorro de agua pequeño, la cubeta se llena en 10 minutos Cuál será el valor de precarga necesario para que este sistema nos indique que ha transcurrido un tiempo de 6 minutos? Seria depositar
17 Con el chorro de agua pequeño, la cubeta se llena en 10 minutos Cuál será el valor de precarga necesario para que este sistema nos indique que ha transcurrido un tiempo de 6 minutos? Seria depositar
1. ÍNDICE. Índice de contenido 2. INTRODUCCIÓN 3. CONTENIDO 1. OBJETIVOS DEL PROYECTO
 ULPGC, Universidad de Las Palmas de Gran Canarias. Facultad de Informática. Asignatura: Diseño de Sistemas Basados en Microprocesadores Profesor: Ricardo Pérez García. Regador Automático ACOSTA PADRÓN,
ULPGC, Universidad de Las Palmas de Gran Canarias. Facultad de Informática. Asignatura: Diseño de Sistemas Basados en Microprocesadores Profesor: Ricardo Pérez García. Regador Automático ACOSTA PADRÓN,
PIC MICRO ESTUDIO Reloj en tiempo real RTCU2 Clave: 719 www.electronicaestudio.com
 PIC MICRO ESTUDIO Reloj en tiempo real RTCU2 Clave: 719 www.electronicaestudio.com Guía de Operación Reloj en tiempo real Modulo: RTCU2iempo real Clave: 719 El modulo 719 Reloj en tiempo real- utiliza
PIC MICRO ESTUDIO Reloj en tiempo real RTCU2 Clave: 719 www.electronicaestudio.com Guía de Operación Reloj en tiempo real Modulo: RTCU2iempo real Clave: 719 El modulo 719 Reloj en tiempo real- utiliza
RECURSOS FUNDAMENTALES
 RECURSOS FUNDAMENTALES Los recursos que se considerarán son : Temporizadores Puertos de E/S La Palabra de Configuración EEPROM de datos 1 TEMPORIZADORES Una labor habitual en los programas de control suele
RECURSOS FUNDAMENTALES Los recursos que se considerarán son : Temporizadores Puertos de E/S La Palabra de Configuración EEPROM de datos 1 TEMPORIZADORES Una labor habitual en los programas de control suele
Registros SFR vistos hasta ahora: Microcontroladores PIC
 Registros SFR vistos hasta ahora: Microcontroladores PIC Microcontroladores PIC: Timer Características del Timer TMR0: Cumple básicamente la función de contador de eventos (o divisor de frecuencia). El
Registros SFR vistos hasta ahora: Microcontroladores PIC Microcontroladores PIC: Timer Características del Timer TMR0: Cumple básicamente la función de contador de eventos (o divisor de frecuencia). El
Microcontrolador PIC 16F84
 PROGRAMACIÓN PIC (II) Microcontrolador PIC 16F84 mail : enric.serra 0 - INTRODUCCIÓN. Este documento es una continuación al documento de programación del PIC 16f84. Este documento se puede copiar y utilizar
PROGRAMACIÓN PIC (II) Microcontrolador PIC 16F84 mail : enric.serra 0 - INTRODUCCIÓN. Este documento es una continuación al documento de programación del PIC 16f84. Este documento se puede copiar y utilizar
CALCULADORA DE FUNCIONES BÁSICAS Oscar Gregorio Pérez Macías mummy007_02@hotmail.com
 CALCULADORA DE FUNCIONES BÁSICAS Oscar Gregorio Pérez Macías mummy007_02@hotmail.com RESUMEN La función de la calculadora de funciones básicas, es realizar las operaciones tales como: suma, resta y multiplicación
CALCULADORA DE FUNCIONES BÁSICAS Oscar Gregorio Pérez Macías mummy007_02@hotmail.com RESUMEN La función de la calculadora de funciones básicas, es realizar las operaciones tales como: suma, resta y multiplicación
x u 05h - - RA5 RA4 RA3 RA2 RA1 RA0 Bit 7 6 5 4 3 2 1 0 Registro PORTA (05h)
") 3..- Descriipciión Dettallllada dell PIIC16F877 Descripción Detallada del PIC16F87 3.1.- Los Puertos Paralelos de Entrada / Salida Los integrados PIC16F874 y PIC16F877 poseen 5 puertos de entrada / salida
3..- Descriipciión Dettallllada dell PIIC16F877 Descripción Detallada del PIC16F87 3.1.- Los Puertos Paralelos de Entrada / Salida Los integrados PIC16F874 y PIC16F877 poseen 5 puertos de entrada / salida
Tema 6: Microcontroladores
 Tema 6: Microcontroladores Carlos Garre del Olmo 1 Microcontroladores Contenidos Introducción a los microcontroladores. Principales familias y sus características. La familia PIC16. Programación de microcontroladores.
Tema 6: Microcontroladores Carlos Garre del Olmo 1 Microcontroladores Contenidos Introducción a los microcontroladores. Principales familias y sus características. La familia PIC16. Programación de microcontroladores.
Sistema de seguridad con emisión de mensaje SMS
 Sistema de seguridad con emisión de mensaje SMS INDICE 1.- INTRODUCCIÓN Pág. 1 2.- ELEMENTOS HARDWARE EMPLEADOS. Pág. 1 3.- COMUNICACIÓN SERIE (Comandos at)... Pág. 4 4.- EXPLICACIÓN DEL PROGRAMA... Pág.
Sistema de seguridad con emisión de mensaje SMS INDICE 1.- INTRODUCCIÓN Pág. 1 2.- ELEMENTOS HARDWARE EMPLEADOS. Pág. 1 3.- COMUNICACIÓN SERIE (Comandos at)... Pág. 4 4.- EXPLICACIÓN DEL PROGRAMA... Pág.
Estructura de Microprocesadores. Profesor Ing. Johan Carvajal Godínez
 Estructura de Microprocesadores PIC 18F4550 Administración de los temporizadores Profesor Ing. Johan Carvajal Godínez Módulos temporizadores El MCU 18F4550 posee cuatro módulos de temporización independientes
Estructura de Microprocesadores PIC 18F4550 Administración de los temporizadores Profesor Ing. Johan Carvajal Godínez Módulos temporizadores El MCU 18F4550 posee cuatro módulos de temporización independientes
Programación en PIC Los primeros pasos
 Capítulo V Programación en PIC Los primeros pasos Encender y apagar un LED Secuenciador con cuatro LED's Leer los pulsadores y encender el LED correspondiente Programa avanzado utilizando el entrenador
Capítulo V Programación en PIC Los primeros pasos Encender y apagar un LED Secuenciador con cuatro LED's Leer los pulsadores y encender el LED correspondiente Programa avanzado utilizando el entrenador
Proyecto Final Robot. Docentes: Collovati Susana Lasarte Matias Correa Diego Integrante: Jesús Olguera
 Proyecto Final Robot Docentes: Collovati Susana Lasarte Matias Correa Diego Integrante: Jesús Olguera 1 Introducción: En el siguiente informe se expone la construcción de un robot capaz de seguir líneas.
Proyecto Final Robot Docentes: Collovati Susana Lasarte Matias Correa Diego Integrante: Jesús Olguera 1 Introducción: En el siguiente informe se expone la construcción de un robot capaz de seguir líneas.
Tema: Utilización del módulo ADC en los microcontroladores PIC.
 1 Facultad: Ingeniería Escuela: Electrónica Asignatura: Microcontroladores Lugar de ejecución: Laboratorio de microprocesadores, Edif. 3 Electrónica. Tema: Utilización del módulo ADC en los microcontroladores
1 Facultad: Ingeniería Escuela: Electrónica Asignatura: Microcontroladores Lugar de ejecución: Laboratorio de microprocesadores, Edif. 3 Electrónica. Tema: Utilización del módulo ADC en los microcontroladores
MICROCONTROLADORES PIC
 MICROCONTROLADORES PIC LOS TIMER DE LOS 16F87x TEMA EL TIMER 1 CCFF D.P.E. MÓDULO DE PROYECTOS 1 Diagrama de Bloques del TIMER1 CCFF D.P.E. MÓDULO DE PROYECTOS 2 INTRODUCCIÓN El módulo TIMER1 es un temporizador/contador
MICROCONTROLADORES PIC LOS TIMER DE LOS 16F87x TEMA EL TIMER 1 CCFF D.P.E. MÓDULO DE PROYECTOS 1 Diagrama de Bloques del TIMER1 CCFF D.P.E. MÓDULO DE PROYECTOS 2 INTRODUCCIÓN El módulo TIMER1 es un temporizador/contador
PIC 18F45XX EL TIMER 0
 PIC 18F45XX EL TIMER 0 1. Hardware asociado 2. Características Se puede configurar como temporizador o contador de 8/16 bits. Se puede leer o escribir en él a través del registro TMR0. Dispone de un preescaler
PIC 18F45XX EL TIMER 0 1. Hardware asociado 2. Características Se puede configurar como temporizador o contador de 8/16 bits. Se puede leer o escribir en él a través del registro TMR0. Dispone de un preescaler
El único lenguaje que entienden los microcontroladores es el código máquina formado por ceros y unos del sistema binario.
 1 LENGUAJE ENSAMBLADOR El único lenguaje que entienden los microcontroladores es el código máquina formado por ceros y unos del sistema binario. El lenguaje ensamblador expresa las instrucciones de una
1 LENGUAJE ENSAMBLADOR El único lenguaje que entienden los microcontroladores es el código máquina formado por ceros y unos del sistema binario. El lenguaje ensamblador expresa las instrucciones de una
UNIVERSIDAD DON BOSCO
 CICLO 02 2013 UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLÓGICOS COORDINACIÓN DE ELECTRÓNICA GUÍA DE LABORATORIO Nº 03 ASIGNATURA: Control Digital NOMBRE DE LA PRACTICA: Configuración de los Puertos
CICLO 02 2013 UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLÓGICOS COORDINACIÓN DE ELECTRÓNICA GUÍA DE LABORATORIO Nº 03 ASIGNATURA: Control Digital NOMBRE DE LA PRACTICA: Configuración de los Puertos
Pines de entrada/salida (I/O) de propósito general. Mediante ellos, el micro PIC puede monitorizar y controlar otros dispositivos.
 de propósito general. Mediante ellos, el micro PIC puede monitorizar y controlar otros dispositivos.") 1 Pines de entrada/salida (I/O) de propósito general Mediante ellos, el micro PIC puede monitorizar y controlar otros dispositivos. Para añadir flexibilidad al micro, muchos de sus pines de entrada/salida
1 Pines de entrada/salida (I/O) de propósito general Mediante ellos, el micro PIC puede monitorizar y controlar otros dispositivos. Para añadir flexibilidad al micro, muchos de sus pines de entrada/salida
Comprobador de Encendido Electrónico de un Motor de Explosión
 Comprobador de Encendido Electrónico de un Motor de Explosión Titulación: Ingeniería Técnica en Electrónica Industrial Alumno: Ignacio Doñate Domenech. Tutor: Dr. Roberto Giral. Fecha: Abril del 2011.
Comprobador de Encendido Electrónico de un Motor de Explosión Titulación: Ingeniería Técnica en Electrónica Industrial Alumno: Ignacio Doñate Domenech. Tutor: Dr. Roberto Giral. Fecha: Abril del 2011.
[CURSO BÁSICO DE PIC TABLAS]
![[CURSO BÁSICO DE PIC TABLAS]](/thumbs/54/33375030.jpg "[CURSO BÁSICO DE PIC TABLAS]") 2009 GRUPO ESTUDIANTIL INVENTRONICA Joel Oswaldo Campos Pérez [CURSO BÁSICO DE PIC ] En esta sección explicaremos que son las tablas, para que se usan y como se hacen. Se describe un ejercicio completo
2009 GRUPO ESTUDIANTIL INVENTRONICA Joel Oswaldo Campos Pérez [CURSO BÁSICO DE PIC ] En esta sección explicaremos que son las tablas, para que se usan y como se hacen. Se describe un ejercicio completo
PIC16F882/883/884/886/ Funcionamiento de Timer1 6 EL MODULO TMR1 CON PUERTA DE CONTROL Selección de Fuente de reloj
 6.1. Funcionamiento de Timer1 6 EL MODULO TMR1 CON PUERTA DE CONTROL El módulo TMR1 es un temporizador/contador de 16 bits con las siguientes características: Temporizador/Contador de 16 bits (TMR1L:TMR1H)
6.1. Funcionamiento de Timer1 6 EL MODULO TMR1 CON PUERTA DE CONTROL El módulo TMR1 es un temporizador/contador de 16 bits con las siguientes características: Temporizador/Contador de 16 bits (TMR1L:TMR1H)
Tema: Comunicación serie entre PIC y PC.
 1 Facultad: Ingeniería Escuela: Electrónica Asignatura: Microcontroladores Lugar de ejecución: Laboratorio de microprocesadores, Edif. 3 Electrónica. Tema: Comunicación serie entre PIC y PC. Objetivo general
1 Facultad: Ingeniería Escuela: Electrónica Asignatura: Microcontroladores Lugar de ejecución: Laboratorio de microprocesadores, Edif. 3 Electrónica. Tema: Comunicación serie entre PIC y PC. Objetivo general
Temporizadores y contadores en tiempo real: El módulo Timer0 del PIC.
 Temporizadores y contadores en tiempo real: El módulo Timer0 del PIC. 1. Introducción... 1 2. Funcionamiento del Timer0... 1 2.1. Estructura general del Timer0...2 2.2. Entrada de reloj del modulo Timer0...2
Temporizadores y contadores en tiempo real: El módulo Timer0 del PIC. 1. Introducción... 1 2. Funcionamiento del Timer0... 1 2.1. Estructura general del Timer0...2 2.2. Entrada de reloj del modulo Timer0...2
Microprocesadores. Temporizadores / Contadores. Prof. Luis Araujo. Universidad de Los Andes
 Temporizadores / Contadores Universidad de Los Andes Temporizador / Contador Timer 0 Temporizador/Contador de 8 bits (TMR0), Preescalador programable de 8 bits, Modo temporizador: el valor del registro
Temporizadores / Contadores Universidad de Los Andes Temporizador / Contador Timer 0 Temporizador/Contador de 8 bits (TMR0), Preescalador programable de 8 bits, Modo temporizador: el valor del registro
Rutinas de programación
 Capítulo VI Rutinas de programación La suma La resta La rotación La multiplicación La división Conversión binario a BCD Suma BCD Conexión de displays al PIC Curso Básico de Microcontroladores PIC 79 80
Capítulo VI Rutinas de programación La suma La resta La rotación La multiplicación La división Conversión binario a BCD Suma BCD Conexión de displays al PIC Curso Básico de Microcontroladores PIC 79 80
UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLÓGICOS COORDINACIÓN DE ELECTRÓNICA GUÍA DE LABORATORIO Nº 02
 CICLO II-2013 UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLÓGICOS COORDINACIÓN DE ELECTRÓNICA GUÍA DE LABORATORIO Nº 02 Asignatura: Control Digital Nombre de la Practica: Instrucciones básicas de los
CICLO II-2013 UNIVERSIDAD DON BOSCO FACULTAD DE ESTUDIOS TECNOLÓGICOS COORDINACIÓN DE ELECTRÓNICA GUÍA DE LABORATORIO Nº 02 Asignatura: Control Digital Nombre de la Practica: Instrucciones básicas de los
Microcontrolador PIC 16F84
 INTRODUCCIÓN A LA PROGRAMACIÓN Microcontrolador PIC 16F84 mail : enric.serra 0 - INTRODUCCIÓN. Este documento es una introducción a la programación del PIC 16f84. Este documento se puede copiar y utilizar
INTRODUCCIÓN A LA PROGRAMACIÓN Microcontrolador PIC 16F84 mail : enric.serra 0 - INTRODUCCIÓN. Este documento es una introducción a la programación del PIC 16f84. Este documento se puede copiar y utilizar
Proyectos con el PIC16F84
 Capítulo 2 Proyectos con el PIC6F84 Conexión de LED y dipswitch Manejo de un display de siete segmentos Multiplexaje de teclados y displays Conexión de memorias seriales al PIC Manejo de un módulo LCD
Capítulo 2 Proyectos con el PIC6F84 Conexión de LED y dipswitch Manejo de un display de siete segmentos Multiplexaje de teclados y displays Conexión de memorias seriales al PIC Manejo de un módulo LCD
Procesos de Fabricación I. Guía 1 MOTORES DE COMBUSTION INTERNA I
 Procesos de Fabricación I. Guía 1 MOTORES DE COMBUSTION INTERNA I Tema: Análisis del Sistema de Encendido. Contenidos El Sistema de Encendido Convencional. El Sistema de Encendido Electrónico y/o Digital
Procesos de Fabricación I. Guía 1 MOTORES DE COMBUSTION INTERNA I Tema: Análisis del Sistema de Encendido. Contenidos El Sistema de Encendido Convencional. El Sistema de Encendido Electrónico y/o Digital
INGENIERIA EN MICROCONTROLADORES. Maquinas de Estado. Introducción
 INGENIERIA EN MICROCONTROLADORES Maquinas de Estado Introducción MAQUINA DE ESTADOS www.i-micro.com Ingeniería en Microcontroladores Teléfono 044 55 11 29 55 05 E-mail: cursos@i-micro.com elp@i-micro.com
INGENIERIA EN MICROCONTROLADORES Maquinas de Estado Introducción MAQUINA DE ESTADOS www.i-micro.com Ingeniería en Microcontroladores Teléfono 044 55 11 29 55 05 E-mail: cursos@i-micro.com elp@i-micro.com
PIC16C5X (GAMA BAJA) Solo en dispositivos de 28 pins. Encapsulado y patillaje:
 Solo en dispositivos de 28 pins. Encapsulado y patillaje:") PIC6C5X (GAMA BAJA) Oscilador RESET SLEEP WatchDog Timer (WDT) Protección de código e IDs Periféricos: Timer/Contador de 8bits (T) con prescaler compartido para WDT o TMR Hasta 3 puertos I/O (RA,RB,RC)
PIC6C5X (GAMA BAJA) Oscilador RESET SLEEP WatchDog Timer (WDT) Protección de código e IDs Periféricos: Timer/Contador de 8bits (T) con prescaler compartido para WDT o TMR Hasta 3 puertos I/O (RA,RB,RC)
TUTORIAL PRIMERA PARTE: GENERACIÓN DE UN RETARDO CON TIMER.
 1 TUTORIAL OBJETIVOS Familiarizarse con el TMR0 como contador de pulsos internos y generador de retardos. Conocer el método del polling para verificar banderas de dispositivos. Crear y manipular variables
1 TUTORIAL OBJETIVOS Familiarizarse con el TMR0 como contador de pulsos internos y generador de retardos. Conocer el método del polling para verificar banderas de dispositivos. Crear y manipular variables
La familia PIC18 USB posee 4 timers: Timer0, Timer1, Timer2 y Timer3, cada uno de los cuales tiene sus características únicas.
 59 5 TIMERS Todos los microcontroladores poseen circuitos temporizadores (timers), los cuales son útiles para: Programar tareas con alta precisión. Contar pulsos externos. Medir intervalos de tiempo. etc.
59 5 TIMERS Todos los microcontroladores poseen circuitos temporizadores (timers), los cuales son útiles para: Programar tareas con alta precisión. Contar pulsos externos. Medir intervalos de tiempo. etc.
Transmisión de datos por Radio Frecuencia
 Transmisión de datos por Radio Frecuencia Diseño de Sistemas Basados en Microcontrolador Universidad de Las Palmas de Gran Canaria 2003-04 José Carlos Ruiz Luque Francisco García Rodríguez 1 CONTENIDOS
Transmisión de datos por Radio Frecuencia Diseño de Sistemas Basados en Microcontrolador Universidad de Las Palmas de Gran Canaria 2003-04 José Carlos Ruiz Luque Francisco García Rodríguez 1 CONTENIDOS
Coche Teledirigido. Profesor: Pedro Alonso Sanz Instituto: I.E.S. Joan Miró Localidad: San Sebastián de los Reyes
 Coche Teledirigido Profesor: Pedro Alonso Sanz Instituto: I.E.S. Joan Miró Localidad: San Sebastián de los Reyes Índice Página 1.- Hardware... 2 1.1.- Esquema Eléctrico simulado del Mando y Coche Teledirigido...
Coche Teledirigido Profesor: Pedro Alonso Sanz Instituto: I.E.S. Joan Miró Localidad: San Sebastián de los Reyes Índice Página 1.- Hardware... 2 1.1.- Esquema Eléctrico simulado del Mando y Coche Teledirigido...
:: Microcontroladores PIC - Tabla de Referencias. Conceptos Básicos
 Tutorial de Microcontroladores PIC Http://perso.wanadoo.es/luis_ju San Salvador de Jujuy República Argentina :: Microcontroladores PIC - Tabla de Referencias Conceptos Básicos Qué son los microcontroladores...?
Tutorial de Microcontroladores PIC Http://perso.wanadoo.es/luis_ju San Salvador de Jujuy República Argentina :: Microcontroladores PIC - Tabla de Referencias Conceptos Básicos Qué son los microcontroladores...?
PIC16F88. Características
 Osciladores PIC16F88. Características Osciladores a cristal: LP, XT y HS hasta 20Mhz Oscilador externo hasta 20Mhz Oscilador interno: 31Khz 8Mhz Periféricos Módulo PWM/CCP CCP (captura/comparación) ->
Osciladores PIC16F88. Características Osciladores a cristal: LP, XT y HS hasta 20Mhz Oscilador externo hasta 20Mhz Oscilador interno: 31Khz 8Mhz Periféricos Módulo PWM/CCP CCP (captura/comparación) ->
Tema: Uso de pantalla matricial LCD y teclado matricial con eliminación de rebote.
 1 Facultad: Ingeniería Escuela: Electrónica Asignatura: Microcontroladores Lugar de ejecución: Laboratorio de microprocesadores, Edif. 3 Electrónica. Tema: Uso de pantalla matricial LCD y teclado matricial
1 Facultad: Ingeniería Escuela: Electrónica Asignatura: Microcontroladores Lugar de ejecución: Laboratorio de microprocesadores, Edif. 3 Electrónica. Tema: Uso de pantalla matricial LCD y teclado matricial
LOS PIC16F88X: EEPROM de Usuario
 LOS PIC16F88X: EEPROM de Usuario IES Juan de la Cierva Aprendizaje de la Electrónica a través de la Robótica Domínguez Diagrama de bloques PIC16F884-PIC16F887 Interrupciones en de los PIC16F88X PIR2 INTCON
LOS PIC16F88X: EEPROM de Usuario IES Juan de la Cierva Aprendizaje de la Electrónica a través de la Robótica Domínguez Diagrama de bloques PIC16F884-PIC16F887 Interrupciones en de los PIC16F88X PIR2 INTCON
Indice. Escrito por Administrator Martes, 02 de Septiembre de 2008 17:45 - Actualizado Domingo, 20 de Septiembre de 2009 07:45 1 / 15
 1 / 15 El contenido del libro " MICROCONTROLADOR PIC16F84. Desarrollo de proyectos " de la Editorial Ra CAPÍTULOS: 1. MICROCONTROLADOR PIC16F84 2. PERIFÉRICOS BÁSICOS 3. GRABACIÓN DE MICROCONTROLADORES
1 / 15 El contenido del libro " MICROCONTROLADOR PIC16F84. Desarrollo de proyectos " de la Editorial Ra CAPÍTULOS: 1. MICROCONTROLADOR PIC16F84 2. PERIFÉRICOS BÁSICOS 3. GRABACIÓN DE MICROCONTROLADORES
ocontro- lador PIC16F84
 8 In Electronics Generación de señales PWM con el microcontr ocontro- lador PIC16F84 por Pietro Loglisci Se considera la forma de utilizar el microcontrolador Microchip PIC16F84 (uno de las más corrientes
8 In Electronics Generación de señales PWM con el microcontr ocontro- lador PIC16F84 por Pietro Loglisci Se considera la forma de utilizar el microcontrolador Microchip PIC16F84 (uno de las más corrientes
PRÁCTICA 4 LOS BITS DE CONFIGURACIÓN DEL PIC16F628
 Los Bits de Configuración del PIC16F628 44 PRÁCTICA 4 LOS BITS DE CONFIGURACIÓN DEL PIC16F628 OBJETIVOS Identificar cada uno de los bits de configuración que rigen el funcionamiento del PIC16F628. Verificar
Los Bits de Configuración del PIC16F628 44 PRÁCTICA 4 LOS BITS DE CONFIGURACIÓN DEL PIC16F628 OBJETIVOS Identificar cada uno de los bits de configuración que rigen el funcionamiento del PIC16F628. Verificar
Tema. Módulo Captura Comparación Modulación n de Achura de Pulsos. C. F. G.S. D.P.E. Módulo de Proyectos 1
 Tema Módulo Captura Comparación Modulación n de Achura de Pulsos C. F. G.S. D.P.E. Módulo de Proyectos 1 Módulo de Captura/ aptura/comparación/ n/pwm Los microcontroladores de la familia 16F87X disponen
Tema Módulo Captura Comparación Modulación n de Achura de Pulsos C. F. G.S. D.P.E. Módulo de Proyectos 1 Módulo de Captura/ aptura/comparación/ n/pwm Los microcontroladores de la familia 16F87X disponen
 Motores y sus sistemas auxiliares Encendido electrónico Tema 15. Encendido electrónico. 1 15.1. Sistemas de encendido electrónico Limitaciones de sistemas de encendido convencional. 1. Limitación de velocidad
Motores y sus sistemas auxiliares Encendido electrónico Tema 15. Encendido electrónico. 1 15.1. Sistemas de encendido electrónico Limitaciones de sistemas de encendido convencional. 1. Limitación de velocidad
1. Calcula la cilindrada de un motor de 4 cilindros si el diámetro del cilindro es de 50 mm y la carrera del pistón es de 85 mm.
 UNIDAD 1: El motor de combustión ACTIVIDADES - PÁG. 16 1. Calcula la cilindrada de un motor de 4 cilindros si el diámetro del cilindro es de 50 mm y la carrera del pistón es de 85 mm. 2 2 2 d 3,14 5 cm
UNIDAD 1: El motor de combustión ACTIVIDADES - PÁG. 16 1. Calcula la cilindrada de un motor de 4 cilindros si el diámetro del cilindro es de 50 mm y la carrera del pistón es de 85 mm. 2 2 2 d 3,14 5 cm
UNIVERSIDAD AUTÓNOMA DE BAJA CALIFORNIA UNIDAD ENSENADA MATERIA: CONTROL DIGITAL MAESTRO: ZAMARRIPA TOPETE JOSE DE JESUS PRACTICA 1 DAC
 UNIVERSIDAD AUTÓNOMA DE BAJA CALIFORNIA UNIDAD ENSENADA MATERIA: CONTROL DIGITAL MAESTRO: ZAMARRIPA TOPETE JOSE DE JESUS PRACTICA 1 DAC ALUMNO: LIERA GRIJALVA CÉSAR ALBERTO. GRUPO: 3 83 22 DE FEBRERO DE
UNIVERSIDAD AUTÓNOMA DE BAJA CALIFORNIA UNIDAD ENSENADA MATERIA: CONTROL DIGITAL MAESTRO: ZAMARRIPA TOPETE JOSE DE JESUS PRACTICA 1 DAC ALUMNO: LIERA GRIJALVA CÉSAR ALBERTO. GRUPO: 3 83 22 DE FEBRERO DE
;*****************************************PROGRAMA*******************************************
 176 ;*****************************************PROGRAMA******************************************* LIST p=16f628a ; Procesador utilizado INCLUDE "P16F628A.INC" ; Definición de los registros del Pic CONFIG
176 ;*****************************************PROGRAMA******************************************* LIST p=16f628a ; Procesador utilizado INCLUDE "P16F628A.INC" ; Definición de los registros del Pic CONFIG
EDUPIC Módulo 16F628 Manual del Usuario
 1 EDUPIC Módulo 16F628 Manual del Usuario Indice : 1. Introducción 2 2. Descripción general 2 3. Definición de los pines en el 16F628 4 4. Programador de la memoria FLASH 5 5. Oscilador 5 6. Arquitectura
1 EDUPIC Módulo 16F628 Manual del Usuario Indice : 1. Introducción 2 2. Descripción general 2 3. Definición de los pines en el 16F628 4 4. Programador de la memoria FLASH 5 5. Oscilador 5 6. Arquitectura
Experiencia con Motores paso a paso
 Diseño de Sistemas Basados en Microprocesadores Experiencia con Motores paso a paso Rubén Tauroni Gil ITIS 2008-2009 Universidad de Las Palmas de Gran Canaria Índice Objetivos...3 Parte Teórica...4 Desarrollo
Diseño de Sistemas Basados en Microprocesadores Experiencia con Motores paso a paso Rubén Tauroni Gil ITIS 2008-2009 Universidad de Las Palmas de Gran Canaria Índice Objetivos...3 Parte Teórica...4 Desarrollo
Energía fotovoltaica y su aplicación rural
 Energía fotovoltaica y su aplicación rural Antonio Blanco Solsona, Francisco García Trobat Antonio.Blanco@uv.es gtrobat@telefonica.net INTRODUCCIÓN En las fincas rurales aisladas es cada vez más necesario
Energía fotovoltaica y su aplicación rural Antonio Blanco Solsona, Francisco García Trobat Antonio.Blanco@uv.es gtrobat@telefonica.net INTRODUCCIÓN En las fincas rurales aisladas es cada vez más necesario
Alarma con Interfaz DTMF de Línea Telefónica basado en PIC16F84
 Alarma con Interfaz DTMF de Línea Telefónica basado en PIC16F84 Propósito En toda aplicación donde normalmente se requiera el establecimiento de una conexión telefónica se hace necesario el diseño de una
Alarma con Interfaz DTMF de Línea Telefónica basado en PIC16F84 Propósito En toda aplicación donde normalmente se requiera el establecimiento de una conexión telefónica se hace necesario el diseño de una
El objeto de este proyecto es el de construir un robot araña controlado por un PIC16F84A.
 .. Memoria Descriptiva... Objeto El objeto de este proyecto es el de construir un robot araña controlado por un PIC6F8A.... Antecedentes El diseño original no se llegó a realizar en circuito impreso, en
.. Memoria Descriptiva... Objeto El objeto de este proyecto es el de construir un robot araña controlado por un PIC6F8A.... Antecedentes El diseño original no se llegó a realizar en circuito impreso, en
SecurityBot. Entrega. Pontificia Universidad Católica de Chile. Departamento de Ciencias de la Computación IIC2342 Arquitectura de Computadores
 Pontificia Universidad Católica de Chile Escuela de Ingeniería Departamento de Ciencias de la Computación IIC2342 Arquitectura de Computadores Entrega 2: SecurityBot Integrantes: - Cristián Alcoholado
Pontificia Universidad Católica de Chile Escuela de Ingeniería Departamento de Ciencias de la Computación IIC2342 Arquitectura de Computadores Entrega 2: SecurityBot Integrantes: - Cristián Alcoholado
MAYA 50. Es una tarjeta electrónica diseñada para controlar y realizar prácticas de microcontroladores basada en el MCU PIC18F4550.
 MAYA 50 Es una tarjeta electrónica diseñada para controlar y realizar prácticas de microcontroladores basada en el MCU PIC18F4550. 1. Características Maya 50, está basada en el microcontrolador de microchip
MAYA 50 Es una tarjeta electrónica diseñada para controlar y realizar prácticas de microcontroladores basada en el MCU PIC18F4550. 1. Características Maya 50, está basada en el microcontrolador de microchip
TEMA 5 LA MEMORIA DE DATOS MEMORIA RAM D.P.E. DESARROLLO DE PROYECTOS 1
 TEMA 5 LA MEMORIA DE DATOS MEMORIA RAM D.P.E. DESARROLLO DE PROYECTOS 1 Estructura De La Memoria Ram (1) La memoria de datos RAM está dividida en dos partes diferenciadas: 1.- Zona SFR o zona de Registros
TEMA 5 LA MEMORIA DE DATOS MEMORIA RAM D.P.E. DESARROLLO DE PROYECTOS 1 Estructura De La Memoria Ram (1) La memoria de datos RAM está dividida en dos partes diferenciadas: 1.- Zona SFR o zona de Registros
Interrupciones Fuentes de Interrupciones para el PIC16F1787
 Fuentes de para el PIC16F1787 Interrupción externa a través del pin RB0/INT Interrupción por cambio de nivel Interrupción por escritura en la EEPROM Interrupción por desbordamiento del TMR0 Interrupción
Fuentes de para el PIC16F1787 Interrupción externa a través del pin RB0/INT Interrupción por cambio de nivel Interrupción por escritura en la EEPROM Interrupción por desbordamiento del TMR0 Interrupción
Práctica 5 Diseño de circuitos con componentes básicos.
 Práctica 5 Diseño de circuitos con componentes básicos. Descripción de la práctica: -Con esta práctica, se pretende realizar circuitos visualmente útiles con componentes más simples. Se afianzarán conocimientos
Práctica 5 Diseño de circuitos con componentes básicos. Descripción de la práctica: -Con esta práctica, se pretende realizar circuitos visualmente útiles con componentes más simples. Se afianzarán conocimientos
Características generales en el PIC16F877
 Módulo de Conversión / TEUniversidad de Oviedo 1 Módulo de Conversión / Características generales en el PIC16F877 Ocho canales de conversión. Cinco pines de PORT y los tres de PORTE. Convierte la señal
Módulo de Conversión / TEUniversidad de Oviedo 1 Módulo de Conversión / Características generales en el PIC16F877 Ocho canales de conversión. Cinco pines de PORT y los tres de PORTE. Convierte la señal
LCD. Las pantallas de cristal líquido o módulos LCD, como. Módulo. con interface serial
 Módulo Módulo LCD con interface serial LCD con interface serial EDISON DUQUE C. Este módulo permite mostrar, en una pantalla de cristal líquido, los mensajes que son enviados desde una computadora o un
Módulo Módulo LCD con interface serial LCD con interface serial EDISON DUQUE C. Este módulo permite mostrar, en una pantalla de cristal líquido, los mensajes que son enviados desde una computadora o un
Proyecto ROBOT-BALIZA
 Proyecto ROBOT-BALIZA Departamento de Electricidad-Electrónica Alumno: Juan Manuel Romero Rodríguez Profesores: Pedro Alonso Sanz Alfonso García Gallego Juan Dongil García Instituto: I.E.S. Joan Miró Localidad:
Proyecto ROBOT-BALIZA Departamento de Electricidad-Electrónica Alumno: Juan Manuel Romero Rodríguez Profesores: Pedro Alonso Sanz Alfonso García Gallego Juan Dongil García Instituto: I.E.S. Joan Miró Localidad:
ENCENDIDOS TRANSISTORIDADOS TZ-i y TZ-h
 ENCENDIDOS TRANSISTORIDADOS TZ-i y TZ-h SISTEMAS AUXILIARES DEL MOTOR IES Mateo Alemán, curso 2010/11 Miguel Antonio Centeno Sánchez Evolución del sistema SZ al TZ 2 Denominación de los modelos de encendido
ENCENDIDOS TRANSISTORIDADOS TZ-i y TZ-h SISTEMAS AUXILIARES DEL MOTOR IES Mateo Alemán, curso 2010/11 Miguel Antonio Centeno Sánchez Evolución del sistema SZ al TZ 2 Denominación de los modelos de encendido
Manejo LCD Gráfico DSM
 Manejo LCD Gráfico DSM Christopher Orihuela Sosa 10/09/07 Índice Introducción...1 Hardware...2 LCD...3 patillaje...4 tabla de instrucciones...5 Timings...6 Organización de la pantalla...8 Circuito completo...9
Manejo LCD Gráfico DSM Christopher Orihuela Sosa 10/09/07 Índice Introducción...1 Hardware...2 LCD...3 patillaje...4 tabla de instrucciones...5 Timings...6 Organización de la pantalla...8 Circuito completo...9
CONEXIÓN DE UNA PANTALLA LCD A UN MICROCONTROLADOR
 CONEXIÓN DE UNA PANTALLA LCD A UN MICROCONTROLADOR ALUMNOS: José Hipólito Pascual José Luis Fernández Enrique Silvestre Mario Pozo José Ignacio Seguí 1 INDICE 1-Introducción 2- Qué es un LCD? 2.1-Los caracteres
CONEXIÓN DE UNA PANTALLA LCD A UN MICROCONTROLADOR ALUMNOS: José Hipólito Pascual José Luis Fernández Enrique Silvestre Mario Pozo José Ignacio Seguí 1 INDICE 1-Introducción 2- Qué es un LCD? 2.1-Los caracteres
EC02 CONTROLADOR ELECTRONICO PROGRAMABLE
 EC02 CONTROLADOR ELECTRONICO PROGRAMABLE Los controladores EC02 fueron diseñados para ser programados en aplicaciones de pocas entradas salidas, como una opción extremadamente versátil, robusta, eficiente
EC02 CONTROLADOR ELECTRONICO PROGRAMABLE Los controladores EC02 fueron diseñados para ser programados en aplicaciones de pocas entradas salidas, como una opción extremadamente versátil, robusta, eficiente
Seguidores de clase. Universidad Pontificia de Salamanca (Madrid) Microcontrolador PIC 16F877
 Microcontrolador PIC 16F877") Seguidores de clase Universidad Pontificia de Salamanca (Madrid) Microcontrolador PIC 16F877 Microcontroladores Versión 1.5 04 oct. 07 pág. 1 INDICE Características generales del PIC 16F877...2 Diagrama
Seguidores de clase Universidad Pontificia de Salamanca (Madrid) Microcontrolador PIC 16F877 Microcontroladores Versión 1.5 04 oct. 07 pág. 1 INDICE Características generales del PIC 16F877...2 Diagrama
Dentro del PIC16F877 se distinguen tres bloques de memoria.
 1 ORGANIZACIÓN de la MEMORIA Dentro del PIC16F877 se distinguen tres bloques de memoria. Memoria de programa En sus 8192 posiciones (8Kx14bits) contiene el programa con las instrucciones que gobiernan
1 ORGANIZACIÓN de la MEMORIA Dentro del PIC16F877 se distinguen tres bloques de memoria. Memoria de programa En sus 8192 posiciones (8Kx14bits) contiene el programa con las instrucciones que gobiernan
Tema 8. Saltos. (parte I)
") Tema 8 Saltos (parte I) 1 Ya vimos el salto incondicional con goto. SALTOS CONDICIONALES El repertorio del PIC16F84 también dispone de instrucciones de salto condicional, que son aquellas que producen
Tema 8 Saltos (parte I) 1 Ya vimos el salto incondicional con goto. SALTOS CONDICIONALES El repertorio del PIC16F84 también dispone de instrucciones de salto condicional, que son aquellas que producen
El circuito funciona de la siguiente manera: la bobina que va dentro del volante carga el condensador, en el momento que los platinos se abren la
 Lección Nº 15 Por William Barahona En esta oportunidad vamos a estudiar los diferentes circuitos que conforman la parte eléctrica de una moto monocilindrica. Para esto necesitamos conocer los diferentes
Lección Nº 15 Por William Barahona En esta oportunidad vamos a estudiar los diferentes circuitos que conforman la parte eléctrica de una moto monocilindrica. Para esto necesitamos conocer los diferentes
CÓMO FUNCIONA UN PLC Control Combinacional Programación del PLC
 CÓMO FUNCIONA UN PLC Control Combinacional Programación del PLC PROGRAMACIÓN DE PLC Procedimiento para programar y cargar: Determinar los requisitos del sistema al cual se aplica el PLC. Identificar los
CÓMO FUNCIONA UN PLC Control Combinacional Programación del PLC PROGRAMACIÓN DE PLC Procedimiento para programar y cargar: Determinar los requisitos del sistema al cual se aplica el PLC. Identificar los
Práctica 1. Introducción al laboratorio y al ensamblador del PIC. 1. Objetivos. 2. Introducción. 2.1 Ensamblar y simular
 Práctica Introducción al laboratorio y al ensamblador del PIC Práctica Introducción al laboratorio y al ensamblador del PIC. Objetivos El objetivo de esta primera sesión es que el alumno aprenda el manejo
Práctica Introducción al laboratorio y al ensamblador del PIC Práctica Introducción al laboratorio y al ensamblador del PIC. Objetivos El objetivo de esta primera sesión es que el alumno aprenda el manejo
Manual JR72 V2.0 Arranque Automático para Motores a Explosión
 Manual JR72 V2.0 Arranque Automático para Motores a Explosión Descripción General El JR72 es un modulo compacto y económico que integra todas las funciones necesarias para poder automatizar de manera simple
Manual JR72 V2.0 Arranque Automático para Motores a Explosión Descripción General El JR72 es un modulo compacto y económico que integra todas las funciones necesarias para poder automatizar de manera simple
DISEÑO Y CONSTRUCCIÓN DE UN BANCO DE PRUEBA PARA MOTORES DC DE BAJA POTENCIA
 DISEÑO Y CONSTRUCCIÓN DE UN BANCO DE PRUEBA PARA MOTORES DC DE BAJA POTENCIA CARLOS IVAN MINOTTA PEÑALOZA OSCAR RODRÍGUEZ QUIMBAYO UNIVERSIDAD DE SAN BUENVENTURA FACULTAD DE INGENIERÍA INGENIERÍA MECATRÓNICA
DISEÑO Y CONSTRUCCIÓN DE UN BANCO DE PRUEBA PARA MOTORES DC DE BAJA POTENCIA CARLOS IVAN MINOTTA PEÑALOZA OSCAR RODRÍGUEZ QUIMBAYO UNIVERSIDAD DE SAN BUENVENTURA FACULTAD DE INGENIERÍA INGENIERÍA MECATRÓNICA
Técnicas de Diagnostico Sistemas de Encendido
 Técnicas de Diagnostico Sistemas de Encendido Existen en los nuevos modelos de vehículos sistemas de encendido, en los cuales se remplaza el viejo distribuidor Estos dispositivos se llaman de encendido
Técnicas de Diagnostico Sistemas de Encendido Existen en los nuevos modelos de vehículos sistemas de encendido, en los cuales se remplaza el viejo distribuidor Estos dispositivos se llaman de encendido
Indice General: :: Microcontroladores PIC - Parte IV - Trabajando con Display's y Tablas. Microcontroladores - Parte IV - Manejo de Tablas y Display's
 Microcontroladores - Parte IV - Manejo de Tablas y Display's Tutorial bajado de... http://perso.wanadoo.es/luis_ju :: Microcontroladores PIC - Parte IV - Trabajando con Display's y Tablas. Indice General:
Microcontroladores - Parte IV - Manejo de Tablas y Display's Tutorial bajado de... http://perso.wanadoo.es/luis_ju :: Microcontroladores PIC - Parte IV - Trabajando con Display's y Tablas. Indice General:
6 MODULACIÓN DE ANCHO DE PULSO (PWM)
") 69 6 MODULACIÓN DE ANCHO DE PULSO (PWM) En el PWM, se produce un pulso rectangular con un ciclo de trabajo determinado (comúnmente producido por un Timer), este ciclo de trabajo puede variar de 0 a 100%.
69 6 MODULACIÓN DE ANCHO DE PULSO (PWM) En el PWM, se produce un pulso rectangular con un ciclo de trabajo determinado (comúnmente producido por un Timer), este ciclo de trabajo puede variar de 0 a 100%.
Tema 14: Sistemas Secuenciales
 Tema 14: Sistemas Secuenciales Objetivos: (CONTADORES) Introducción. Características de los contadores. Contadores Asíncronos. Contadores Síncronos. 1 INTRODUCCIÓN Los contadores son sistemas secuenciales
Tema 14: Sistemas Secuenciales Objetivos: (CONTADORES) Introducción. Características de los contadores. Contadores Asíncronos. Contadores Síncronos. 1 INTRODUCCIÓN Los contadores son sistemas secuenciales
PRIMERA PRÁCTICA: PRIMERA TOMA DE CONTACTO CON MPLAB IDE MICROBOT RASTREADOR CONSTRUCCIÓN DE UN GRABADOR
 SISTEMAS ELECTRÓNICOS DIGITALES PRIMERA PRÁCTICA: PRIMERA TOMA DE CONTACTO CON MPLAB IDE MICROBOT RASTREADOR CONSTRUCCIÓN DE UN GRABADOR Curso 2008-2009 Profesor: Jaime Gómez Gil E.T.S. Ing. Telecomunicación
SISTEMAS ELECTRÓNICOS DIGITALES PRIMERA PRÁCTICA: PRIMERA TOMA DE CONTACTO CON MPLAB IDE MICROBOT RASTREADOR CONSTRUCCIÓN DE UN GRABADOR Curso 2008-2009 Profesor: Jaime Gómez Gil E.T.S. Ing. Telecomunicación
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE INGENIERÍA DIVISIÓN DE INGENIERÍA ELÉCTRICA DEPARTAMENTO DE INGENIERÍA EN COMPUTACIÓN
 UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE INGENIERÍA DIVISIÓN DE INGENIERÍA ELÉCTRICA DEPARTAMENTO DE INGENIERÍA EN COMPUTACIÓN PRACTICAS LABORATORIO DE MICROCOMPUTADORAS Basadas en el Microcontrolador
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO FACULTAD DE INGENIERÍA DIVISIÓN DE INGENIERÍA ELÉCTRICA DEPARTAMENTO DE INGENIERÍA EN COMPUTACIÓN PRACTICAS LABORATORIO DE MICROCOMPUTADORAS Basadas en el Microcontrolador
Guia para examen de Sistemas Embebidos I Para primer parcial Febrero 2013 Revisión 2 Ing. Julio Cesar Gonzalez Cervantes
 Qué significa ALU? Arithmetic Logic Unit Guia para examen de Sistemas Embebidos I Para primer parcial Febrero 2013 Revisión 2 Ing. Julio Cesar Gonzalez Cervantes que operaciones realiza un ALU? suma, resta,
Qué significa ALU? Arithmetic Logic Unit Guia para examen de Sistemas Embebidos I Para primer parcial Febrero 2013 Revisión 2 Ing. Julio Cesar Gonzalez Cervantes que operaciones realiza un ALU? suma, resta,
BANCO DE PREGUNTAS DE MOTORES MARINOS PARA CAPITÁN DEPORTIVO COSTERO
 BANCO DE PREGUNTAS DE MOTORES MARINOS PARA CAPITÁN DEPORTIVO COSTERO 1.- Se llaman motores de cuatro tiempos porque: a) Dan cuatro revoluciones en cada metro de avance. b) Llevan cuatro válvulas en la
BANCO DE PREGUNTAS DE MOTORES MARINOS PARA CAPITÁN DEPORTIVO COSTERO 1.- Se llaman motores de cuatro tiempos porque: a) Dan cuatro revoluciones en cada metro de avance. b) Llevan cuatro válvulas en la
OSCILADOR COLPITTS CON TRANSISTOR CRISTAL
 OSCILADOR COLPITTS CON TRANSISTOR CRISTAL EDGAR HERNANDO CRIOLLO VELÁSQUEZ Cuso30@hotmail.com JOSE LUIS ALMENAREZ GARCIA Ucho8@hotmail.com UNIVERSIDAD CATOLICA DE MANIZALES FACULTAD DE INGENIERIA INGENIERIA
OSCILADOR COLPITTS CON TRANSISTOR CRISTAL EDGAR HERNANDO CRIOLLO VELÁSQUEZ Cuso30@hotmail.com JOSE LUIS ALMENAREZ GARCIA Ucho8@hotmail.com UNIVERSIDAD CATOLICA DE MANIZALES FACULTAD DE INGENIERIA INGENIERIA
EL TEMPORIZADOR 555 FUNCIONAMIENTO BÁSICO. FUNCIONAMIENTO COMO MONOESTABLE. FUNCIONAMIENTO COMO AESTABLE
 EL TEMPORIZADOR 555 FUNCIONAMIENTO BÁSICO. FUNCIONAMIENTO COMO MONOESTABLE. FUNCIONAMIENTO COMO AESTABLE EL TEMPORIZADOR 555. El temporizador 555 es un dispositivo versátil y muy utilizado, por que puede
EL TEMPORIZADOR 555 FUNCIONAMIENTO BÁSICO. FUNCIONAMIENTO COMO MONOESTABLE. FUNCIONAMIENTO COMO AESTABLE EL TEMPORIZADOR 555. El temporizador 555 es un dispositivo versátil y muy utilizado, por que puede
Entrada / Salida. Relojes y terminales. Dr. Alonso Ramírez Manzanares 4-Nov-2010
 Entrada / Salida. Relojes y terminales Dr. Alonso Ramírez Manzanares 4-Nov-2010 Relojes Tambien conocidos como timers o temporizadores. Son esenciales en sistemas de tiempo compartido. El software de reloj
Entrada / Salida. Relojes y terminales Dr. Alonso Ramírez Manzanares 4-Nov-2010 Relojes Tambien conocidos como timers o temporizadores. Son esenciales en sistemas de tiempo compartido. El software de reloj
Introducción. Flujo Eléctrico.
 Introducción La descripción cualitativa del campo eléctrico mediante las líneas de fuerza, está relacionada con una ecuación matemática llamada Ley de Gauss, que relaciona el campo eléctrico sobre una
Introducción La descripción cualitativa del campo eléctrico mediante las líneas de fuerza, está relacionada con una ecuación matemática llamada Ley de Gauss, que relaciona el campo eléctrico sobre una
Tema 11. Introducción a los Microprocesadores y Microcontroladores
 Unidad 11 Introducción a los microprocesadores y microcontroladores Andres.Iborra@upct.es Juan.Suardiaz@upct.es Septiembre 2002 1 CONTENIDO Unidad 11. Introducción a los microprocesadores y microcontroladores.
Unidad 11 Introducción a los microprocesadores y microcontroladores Andres.Iborra@upct.es Juan.Suardiaz@upct.es Septiembre 2002 1 CONTENIDO Unidad 11. Introducción a los microprocesadores y microcontroladores.
Temporizadores y contadores en tiempo real: El módulo Timer0 y el prescaler del PIC
 Temporizadores y contadores en tiempo real: El módulo Timer0 y el aler del PIC 1. Introducción...1 2. Estructura del Timer0...1 3. Funcionamiento del Timer0...2 3.1. Entrada de reloj del modulo Timer0...
Temporizadores y contadores en tiempo real: El módulo Timer0 y el aler del PIC 1. Introducción...1 2. Estructura del Timer0...1 3. Funcionamiento del Timer0...2 3.1. Entrada de reloj del modulo Timer0...
EJERCICIOS PAU FÍSICA ANDALUCÍA Autor: Fernando J. Nora Costa-Ribeiro Más ejercicios y soluciones en fisicaymat.wordpress.com
 INDUCCIÓN ELECTROMAGNÉTICA 1- a) Explique en qué consiste el fenómeno de inducción electromagnética y escriba la ley de Lenz-Faraday. b) Una espira, contenida en el plano horizontal XY y moviéndose en
INDUCCIÓN ELECTROMAGNÉTICA 1- a) Explique en qué consiste el fenómeno de inducción electromagnética y escriba la ley de Lenz-Faraday. b) Una espira, contenida en el plano horizontal XY y moviéndose en
INSTALACIÓN ELÉCTRICA
 INSTALACIÓN ELÉCTRICA INFORMACIÓN DE SERVICIO... 15-1 ANÁLISIS DE PROBLEMAS... 15-1 CIRCUITO DE CARGA... 15-3 BATERÍA... 15-4 ENCENDIDO... 15-7 SISTEMA DE ARRANQUE... 15-11 15-0 INFORMACIÓN DE SERVICIO
INSTALACIÓN ELÉCTRICA INFORMACIÓN DE SERVICIO... 15-1 ANÁLISIS DE PROBLEMAS... 15-1 CIRCUITO DE CARGA... 15-3 BATERÍA... 15-4 ENCENDIDO... 15-7 SISTEMA DE ARRANQUE... 15-11 15-0 INFORMACIÓN DE SERVICIO
Manual sobre Motores a Pasos (Stepper motors)
") Manual sobre Motores a Pasos (Stepper motors) Los motores a pasos o paso a paso son ideales en la construcción de mecanismos donde se requieren movimientos con exactitud. Estos motores son dispositivos
Manual sobre Motores a Pasos (Stepper motors) Los motores a pasos o paso a paso son ideales en la construcción de mecanismos donde se requieren movimientos con exactitud. Estos motores son dispositivos
Tema 14. Interrupciones. Las. C. F. G.S. D.P.E. Módulo de Proyectos 1
 Tema 14 Las Interrupciones C. F. G.S. D.P.E. Módulo de Proyectos 1 Los PIC de la familia 16F8X poseen 4 fuentes de interrupción: Interrupción externa a través del pin RB0/INT Interrupción por overflow
Tema 14 Las Interrupciones C. F. G.S. D.P.E. Módulo de Proyectos 1 Los PIC de la familia 16F8X poseen 4 fuentes de interrupción: Interrupción externa a través del pin RB0/INT Interrupción por overflow
ARRANQUE DE LÁMPARAS FLUORESCENTES
 4 ARRANQUE DE LÁMPARAS FLUORESCENTES 4. INTRODUCCIÓN En el uso de sistemas de iluminación fluorescente es necesario alimentar a la lámpara de descarga con el voltaje adecuado para evitar un mal funcionamiento
4 ARRANQUE DE LÁMPARAS FLUORESCENTES 4. INTRODUCCIÓN En el uso de sistemas de iluminación fluorescente es necesario alimentar a la lámpara de descarga con el voltaje adecuado para evitar un mal funcionamiento