CARRERA DE INGENIERÍA MECATRÓNICA
|
|
|
- Lucas Vidal Suárez
- hace 5 años
- Vistas:
Transcripción

1

2 CARRERA DE INGENIERÍA MECATRÓNICA DESARROLLO DE UN SISTEMA DE UBICACIÓN EN LA PLATAFORMA ROBÓTICA PARA EXTERIORES TELEOPERADA DEL LABORATORIO DE MANUFACTURA REALIZADO POR: GARZÓN JARAMILO PEDRO MIGUEL OBANDO MALDONADO CARLOS ANDRÉS DIRECTOR: MSc. LOZA MATOVELLE DAVID CÉSAR SANGOLQUÍ ECUADOR 2016
3 CONTENIDO Objetivos Introducción Estado del arte Diseño y Construcción Pruebas y Resultados Conclusiones y Recomendaciones

4 OBJETIVOS General Desarrollar un sistema de ubicación en la plataforma robótica para exteriores teleoperada del laboratorio de manufactura.
5 Específicos OBJETIVOS Implementar un sistema de localización y mapeo simultáneo por medio de un algoritmo que permita explorar un lugar. Diseñar y ajustar los ejes con un diámetro adecuado de las llantas. Resolver problemas de movilidad e impermeabilidad existentes en la plataforma.
6 Específicos OBJETIVOS Realizar una interfaz amigable con el usuario y fácil de usar para el control de la plataforma. Unificar los sistemas de monitoreo y control en un solo dispositivo por medio de un sistema embebido. Realizar pruebas de funcionalidad y efectuar correcciones.




7 INTRODUCCIÓN Cámara Web Mando Teleoperado GO - REX LIDAR
8 ESTADO DEL ARTE Robótica Móvil Percepción Localización Interpretar los datos que le suministra sus sensores para extracción de información útil Determinar su posición en el entorno Planificación Control de Movimiento Decidir cómo actuar para alcanzar el objetivo Gestionar sus actuadores para conseguir la trayectoria deseada


9 ESTADO DEL ARTE NAVEGACIÓN Percepción


10 ESTADO DEL ARTE NAVEGACIÓN Localización Global GPS Odometría Local SLAM Marcas

11 ESTADO DEL ARTE NAVEGACIÓN SLAM El SLAM (Simultaneous Localization and Mapping), permite al robot móvil crear un mapa consistente de manera incremental a medida que avanza por un entorno desconocido.


12 ESTADO DEL ARTE Planificación NAVEGACIÓN MUESTREO CAMPO POTENCIAL TRAYECTORIA CELDILLAS

13 Control de movimiento ESTADO DEL ARTE NAVEGACIÓN
14 DISEÑO DESPLIEGUE DE LA FUNCIÓN DE CALIDAD (QFD) Interacciones Características Técnicas Necesidades o requerimientos Importancia para el cliente Estructura sellada e impermeable Diámetros de ruedas y distancia de ejes acordes Transmisor de video robusto Sistema de navegación robusto Sensor de ubicación local Sensor de ubicación global Alcance de tele operación Software de programación de acceso libre No debe ingresar agua al interior del robot móvil Debe subir al menos una grada Video en tiempo real Debe trasladarse a un punto indicado por si solo No debe chocar No debe perderse Control remoto Software de control de uso libre Importancia Técnica Ponderación %
15 CLASIFICACIÓN EN MODULOS DISEÑO # MÓDULO SUBSISTEMAS FUNCIONES 1 Ubicación Ubicación global Ubicación local Geolocalización del robot Conocimiento del entorno 2 Monitoreo Cámara a bordo Video en tiempo real Interfaz Comunicación humano - máquina 3 Estructura Ruedas Capacidades todoterreno Cubierta Impermeabilizar 4 Adquisición y Control en bajo nivel N/A mando Adquisición de datos 5 Comunicación N/A Envío y recepción de señales
16 ETAPAS DE DESARROLLO Sistema de ubicación Sistema mecánico Sistema electrónico Software y Control
17 ETAPAS DE DESARROLLO Sistema de ubicación Sistema mecánico Sistema electrónico Software y Control





18 SISTEMA DE UBICACIÓN LIDAR Lite V 2 GPS EM-506 Motor paso a paso NEMA 17 Anillo colector Piezas plasticas ABS


19 SISTEMA DE UBICACIÓN


20 SISTEMA DE UBICACIÓN RS1

21 SISTEMA DE UBICACIÓN

22 SISTEMA DE UBICACIÓN





23 SISTEMA DE UBICACIÓN



24 SISTEMA DE UBICACIÓN
25 ETAPAS DE DESARROLLO Sistema de ubicación Sistema mecánico Sistema electrónico Software y Control

26 SISTEMA MECÁNICO DISEÑO Y CONSTRUCCIÓN DE ELEMENTOS MECÁNICOS ACONDICIONAMINETO DE LAS RUEDAS

27 SISTEMA MECÁNICO DISEÑO Y CONSTRUCCIÓN DE ELEMENTOS MECÁNICOS ACONDICIONAMINETO DE LAS RUEDAS



28 SISTEMA MECÁNICO DISEÑO Y CONSTRUCCIÓN DE ELEMENTOS MECÁNICOS ACONDICIONAMINETO DE LAS RUEDAS




29 SISTEMA MECÁNICO DISEÑO Y CONSTRUCCIÓN DE ELEMENTOS MECÁNICOS SELLADO DE LA ESTRUCTURA


30 SISTEMA MECÁNICO
31 ETAPAS DE DESARROLLO Sistema de ubicación Sistema mecánico Sistema electrónico Software y Control



32 SISTEMA ELECTRÓNICO DISEÑO Y SELECCIÓN COMPONENTES ELECTRÓNICOS Raspberry pi 2 model B Monster Motor Shield Lm2596 dc-dc Buck A4988 Stepper Motor Driver Circuito Acondicionamiento







33 Arquitectura general SISTEMA ELECTRÓNICO SENSORES ACONDICIONAMINETO BATERIA INTERFAZ HMI ROUTER Lm2596 Buck GO-REX RASPBERRY PI 2 B Monster Motor Shield ACTUADORES

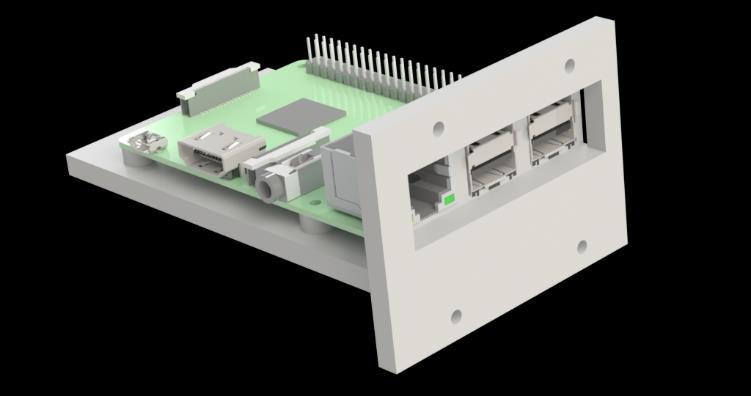



34 Caja de control SISTEMA ELECTRÓNICO
35 ETAPAS DE DESARROLLO Sistema de ubicación Sistema mecánico Sistema electrónico Software y Control
36 Arquitectura de control SISTEMA SOFTWARE SLAM LIDAR Mensaje ROS LIDAR GPS Mensaje ROS GPS Interfaz HMI Control Motores CÁMARA Mensaje ROS CÁMARA Reconocimeinto Codigo QR Estructura de Software
37 Programas/Nodos de ROS SISTEMA SOFTWARE Nodo /nodo_gorex /lidar_gorex /camara_gorex /barcode_detector /gps_gorex /qr_gorex Descripción Controla el movimiento por medio de los motores de la plataforma. Es el encargado de la recepción y manejo de los datos obtenidos por el Lidar. Capta la imagen de la cámara e bordo y la pública como mensaje de ROS. Reconoce los códigos QR dentro de la imagen captada por la cámara. Encargado del funcionamiento del GPS y captación de datos. Controla los comandos dados para el QR Tópicos /cmd_vel /scan /cámara_gorex/image_raw /cámara_gorex/camera_info /fix /markers /vel Descripción Mensaje de velocidad lineal y angular en los 3 ejes. Mensaje del lidar. Datos de la imagen de la cámara. Información básica de la configuración de la cámara. Información obtenida por el sensor GPS Contiene la posición, el tamaño y el significado del código QR. Velocidad dada por el GPS.

38 SISTEMA SOFTWARE Interfaz de usuario humano máquina
39 PRUEBAS Y RESULTADOS PROCESAMIENTO COMPUTACIONAL El ancho de banda ocupado es de aproximadamente 5,6 MB/s. La capacidad de procesamiento de la placa Raspberry fue suficiente. Los nodos ocupan un procesamiento de entre 60% y 75% en el controlador del robot (Raspberry) y 15% en el PC

40 PRUEBAS Y RESULTADOS Autonomía Los datos recogidos sobre la autonomía del sistema reflejan un resultado de 2 horas, debido a que la plataforma es incapaz de funcionar con tensiones bajo los 10 Voltios. Tiempo [min] Voltaje [V] con carga Tiempo [min] Voltaje [V] sin carga
41 PRUEBAS Y RESULTADOS Movilidad La evaluación inicial detalla un recorrido de 10 metros de distancia en línea recta en diferentes terrenos, la desviación que sufre el carro desde su centro de masa y el PWM mínimo usado para que inicie el movimiento. Recorrido 10m PWM % Desviación [cm] Concreto calcáreo liso Concreto Adoquín Césped Recorrido 10m Desviación [cm] Concreto calcáreo liso 52 Concreto 61 Adoquín 38 Césped 79
42 PRUEBAS Y RESULTADOS SLAM SE comprobó el funcionamiento del sensor, la capacidad de construcción de mapas y la precisión con la que el robot se ubica dentro del mapa creado. Lidar Distancia mm Diferencia Porcentaje % , , , , ,3 Lidar Distancia mm Diferencia Porcentaje % , , , , ,36
43 CONCLUSIONES Tamaño y peso Dimensiones externas ( l x w x h ) 810 x 660 x 410 mm Dimensiones internas 300 x 380 x 90 mm Peso 30 kg Ruedas 165 mm Altura del chasis 100 mm Velocidad y rendimiento Carga útil 20 kg Batería y la potencia SISTEMA Velocidad máxima 0.7 m/s Batería batería de plomo-ácido Transmisión / accionamiento 4x4 Capacidad 12 V, 24 Ah Angulo máximo de ascenso 25 Duración - STANDBY 8 horas Duración uso nominal 2 horas Tiempo de carga 6 horas Interfaz y comunicación Formas de control Centro de mando teleoperado, Comunicación Wi-Fi (20 dbm) LIDAR Lite V2 200 pulses/s DRIVERS AND APIs ROS, C++, and Python.



44 CONCLUSIONES



45 RECOMENDACIONES

46 RECOMENDACIONES
47 GRACIAS POR SU ATENCIÓN
UNIVERSIDAD DE MONTERREY VICERRECTORÍA ACADÉMICA DIVISIÓN DE INGENIERÍA Y TECNOLOGÍAS DEPARTAMENTO DE INGENIERÍA
 UNIVERSIDAD DE MONTERREY VICERRECTORÍA ACADÉMICA DIVISIÓN DE INGENIERÍA Y TECNOLOGÍAS DEPARTAMENTO DE INGENIERÍA Robot para Mercury Challenge Bogotá, Colombia 2017 Asesor: Dr. Christian Román Hassard Gastélum
UNIVERSIDAD DE MONTERREY VICERRECTORÍA ACADÉMICA DIVISIÓN DE INGENIERÍA Y TECNOLOGÍAS DEPARTAMENTO DE INGENIERÍA Robot para Mercury Challenge Bogotá, Colombia 2017 Asesor: Dr. Christian Román Hassard Gastélum
EXTENSIÓN - LATACUNGA CARRERA DE INGENIERÍA AUTOMOTRIZ
 EXTENSIÓN - LATACUNGA CARRERA DE INGENIERÍA AUTOMOTRIZ TEMA: "DISEÑO Y CONSTRUCCIÓN DE UN BANCO DIDÁCTICO PARA PRUEBAS DEL SISTEMA ELECTRÓNICO DE ESTABILIDAD MEDIANTE EL CONTROL DE FRENADO AUTORES: CRISTIAN
EXTENSIÓN - LATACUNGA CARRERA DE INGENIERÍA AUTOMOTRIZ TEMA: "DISEÑO Y CONSTRUCCIÓN DE UN BANCO DIDÁCTICO PARA PRUEBAS DEL SISTEMA ELECTRÓNICO DE ESTABILIDAD MEDIANTE EL CONTROL DE FRENADO AUTORES: CRISTIAN
LOCALIZACIÓN Y MAPEO SIMULTÁNEO EN TIEMPO REAL, EMPLEANDO UNA CÁMARA MONOCULAR
 LOCALIZACIÓN Y MAPEO SIMULTÁNEO EN TIEMPO REAL, EMPLEANDO UNA CÁMARA MONOCULAR Presentado por: Ing. ANDRES ALEJANDRO DIAZ TORO Director: Dr. Eduardo Caicedo Bravo Asesor: Dra. Lina María Paz GRUPO DE INVESTIGACION
LOCALIZACIÓN Y MAPEO SIMULTÁNEO EN TIEMPO REAL, EMPLEANDO UNA CÁMARA MONOCULAR Presentado por: Ing. ANDRES ALEJANDRO DIAZ TORO Director: Dr. Eduardo Caicedo Bravo Asesor: Dra. Lina María Paz GRUPO DE INVESTIGACION
INFORME DE PROGRESO TUCSON
 TUCSON 2017 INFORME DE PROGRESO TUCSON ROBOT AGRICOLA FERNANDO GAMBINO FABIAN JUAREZ EMMANUEL VAZQUEZ L.I.I.R.I.A. AETTI IDEA GENERAL Diseñar y armar un robot móvil, capaz de desplazarse en terrenos agrícolas
TUCSON 2017 INFORME DE PROGRESO TUCSON ROBOT AGRICOLA FERNANDO GAMBINO FABIAN JUAREZ EMMANUEL VAZQUEZ L.I.I.R.I.A. AETTI IDEA GENERAL Diseñar y armar un robot móvil, capaz de desplazarse en terrenos agrícolas
Manual de uso DRIVER DR-D30
 Manual de uso DRIVER DR-D30 InteliMotor: Control Inteligente para Motores. 1 Control para dos motores: Modelo DR-D30 [24/12v] Diseñado especialmente para controlar simultáneamente dos motores de corriente
Manual de uso DRIVER DR-D30 InteliMotor: Control Inteligente para Motores. 1 Control para dos motores: Modelo DR-D30 [24/12v] Diseñado especialmente para controlar simultáneamente dos motores de corriente
CAPÍTULO 1. pueden llegar y estos robots llegarían a realizar ese trabajo con el solo hecho
 CAPÍTULO 1 1 Descripción del Proyecto. 1.1 Antecedentes El avance tecnológico cada día es más vertiginoso en toda área de la electrónica, y somos testigos de que día tras día surgen nuevos dispositivos
CAPÍTULO 1 1 Descripción del Proyecto. 1.1 Antecedentes El avance tecnológico cada día es más vertiginoso en toda área de la electrónica, y somos testigos de que día tras día surgen nuevos dispositivos
RECTIFICADORA CILÍNDRICA RSM 3000 Máquina de rectificado de cilindros de alta precisión para maquinado interior y exterior
 RECTIFICADORA CILÍNDRICA RSM 3000 Máquina de rectificado de cilindros de alta precisión para maquinado interior y exterior CARACTERÍSTICAS PRINCIPALES La plataforma grande de la máquina en un diseño pesado
RECTIFICADORA CILÍNDRICA RSM 3000 Máquina de rectificado de cilindros de alta precisión para maquinado interior y exterior CARACTERÍSTICAS PRINCIPALES La plataforma grande de la máquina en un diseño pesado
CIM Manufactura Integrada por Computadora INDICE
 INDICE CIM EN CONFIGURACIÓN BÁSICA CIM EN CONFIGURACIÓN AVANZADA CIM EN CONFIGURACIÓN COMPLETA DL CIM-A DL CIM-B DL CIM-C DL CIM-C DL CIM-A DL CIM-B NOTA: Se necesita un electro-compresor monofásico como
INDICE CIM EN CONFIGURACIÓN BÁSICA CIM EN CONFIGURACIÓN AVANZADA CIM EN CONFIGURACIÓN COMPLETA DL CIM-A DL CIM-B DL CIM-C DL CIM-C DL CIM-A DL CIM-B NOTA: Se necesita un electro-compresor monofásico como
REPOTENCIACIÓN Y MODERNIZACIÓN DE UN MONTACARGAS ELÉCTRICO DE PASILLO ANGOSTO CON EXTENSOR MARCA CATERPILLAR PARA LA EMPRESA FAVAG
 REPOTENCIACIÓN Y MODERNIZACIÓN DE UN MONTACARGAS ELÉCTRICO DE PASILLO ANGOSTO CON EXTENSOR MARCA CATERPILLAR PARA LA EMPRESA FAVAG David Aguirre Xavier molina Índice 1 2 3 4 5 6 Introducción Características
REPOTENCIACIÓN Y MODERNIZACIÓN DE UN MONTACARGAS ELÉCTRICO DE PASILLO ANGOSTO CON EXTENSOR MARCA CATERPILLAR PARA LA EMPRESA FAVAG David Aguirre Xavier molina Índice 1 2 3 4 5 6 Introducción Características
2- Sistema de comunicación utilizado (sockets TCP o UDP, aplicaciones, etc.):
:") UNIVERSIDAD DE SAN BUENAVENTURA SEDE BOGOTA INGENIERIA MECATRONICA GRUPO S.I.R.A TUTOR: MORIAN NAIR CALDERON INTEGRANTES: NICOLAS FELIPE CUBILLOS. NAYKOL ANDREY ESPITIA. CRISTIAN DANIEL GARCIA. CARLOS
UNIVERSIDAD DE SAN BUENAVENTURA SEDE BOGOTA INGENIERIA MECATRONICA GRUPO S.I.R.A TUTOR: MORIAN NAIR CALDERON INTEGRANTES: NICOLAS FELIPE CUBILLOS. NAYKOL ANDREY ESPITIA. CRISTIAN DANIEL GARCIA. CARLOS
Ascensor Neumático PVE52 (3 personas - Silla de Ruedas)
") Ascensor Neumático PVE52 (3 personas - Silla de Ruedas) Especificaciones Técnicas PVE52 Tres personas (238 kg) PVE52 Dossier Informativo Generales Diámetro exterior del cilindro: 1316 mm Carga máxima:
Ascensor Neumático PVE52 (3 personas - Silla de Ruedas) Especificaciones Técnicas PVE52 Tres personas (238 kg) PVE52 Dossier Informativo Generales Diámetro exterior del cilindro: 1316 mm Carga máxima:
DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN
 DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN PROYECTO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTRÓNICA E INSTRUMENTACIÓN CHICAISA
DEPARTAMENTO DE ELÉCTRICA Y ELECTRÓNICA CARRERA DE INGENIERÍA ELECTRÓNICA E INSTRUMENTACIÓN PROYECTO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN ELECTRÓNICA E INSTRUMENTACIÓN CHICAISA
Dispositivos de Entrada/Salida
 Dispositivos de Entrada/Salida Notas de clase: Unidad IV Materia: Diseño y Paradigmas de Lenguajes Carrera: Ingeniería en Informática/Ingeniería en Computación Universidad Nacional de San Luis 20/09/2017
Dispositivos de Entrada/Salida Notas de clase: Unidad IV Materia: Diseño y Paradigmas de Lenguajes Carrera: Ingeniería en Informática/Ingeniería en Computación Universidad Nacional de San Luis 20/09/2017
Ascensor Neumático PVE52 (3 personas - Silla de Ruedas)
") Ascensor Neumático PVE52 (3 personas - Silla de Ruedas) Especificaciones Técnicas PVE52 Tres personas (238 kg) PVE52 Dossier Informativo Generales Diámetro exterior del cilindro: 1316 mm Carga máxima:
Ascensor Neumático PVE52 (3 personas - Silla de Ruedas) Especificaciones Técnicas PVE52 Tres personas (238 kg) PVE52 Dossier Informativo Generales Diámetro exterior del cilindro: 1316 mm Carga máxima:
Capítulo 1 Introducción.
 Capítulo 1 Introducción. 1.1 Introducción. La robótica móvil es un área de intensa investigación cuyo objetivo principal es el desarrollo de robots autónomos que puedan desenvolverse en ambientes dinámicos
Capítulo 1 Introducción. 1.1 Introducción. La robótica móvil es un área de intensa investigación cuyo objetivo principal es el desarrollo de robots autónomos que puedan desenvolverse en ambientes dinámicos
ESPECIFICACIONES MATERIALES UTILIZADOS
 Contenido Capítulo 1 INTRODUCCIÓN... 17 1.1 Introducción general... 17 1.2 Hipótesis de trabajo... 18 1.3 Objetivos... 18 1.3.1 Objetivo general... 18 1.3.2 Objetivos específicos... 18 1.4 Área de estudio
Contenido Capítulo 1 INTRODUCCIÓN... 17 1.1 Introducción general... 17 1.2 Hipótesis de trabajo... 18 1.3 Objetivos... 18 1.3.1 Objetivo general... 18 1.3.2 Objetivos específicos... 18 1.4 Área de estudio
Robótica en la Universidad
 Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
DISEÑO Y CONSTRUCCIÓN DE UN ROBOT CARTESIANO DE 3 GRADOS DE LIBERTAD
 DISEÑO Y CONSTRUCCIÓN DE UN ROBOT CARTESIANO DE 3 GRADOS DE LIBERTAD Juan Zuluaga Gómez 1,2,4, Edgar Arcos, Msc 2,3, Julie Berrio, Msc 2,3, Sergio Corredor 2 1 Optimización de procesos con nanotecnología
DISEÑO Y CONSTRUCCIÓN DE UN ROBOT CARTESIANO DE 3 GRADOS DE LIBERTAD Juan Zuluaga Gómez 1,2,4, Edgar Arcos, Msc 2,3, Julie Berrio, Msc 2,3, Sergio Corredor 2 1 Optimización de procesos con nanotecnología
UNIVERSIDAD TECNOLOGICA NACIONAL F.R. AVELLANEDA
 UNIVERSIDAD TECNOLOGICA NACIONAL F.R. AVELLANEDA CENTRO DE ESTUDIANTES DE INGENIERIA TECNOLOGICA ASIGNATURA: Proyecto Final TRABAJO PRACTICO N : -- TITULO: Anteproyecto Transporte Autónomo de Cargas PROFESOR:
UNIVERSIDAD TECNOLOGICA NACIONAL F.R. AVELLANEDA CENTRO DE ESTUDIANTES DE INGENIERIA TECNOLOGICA ASIGNATURA: Proyecto Final TRABAJO PRACTICO N : -- TITULO: Anteproyecto Transporte Autónomo de Cargas PROFESOR:
SEGURIDAD Y MONITOREO DE CONTENEDORES
 SEGURIDAD Y MONITOREO DE CONTENEDORES LA SOLUCIÓN INTEGRAL Y EFECTIVA PARA EL SEGUIMIENTO Y MONITOREO DE CONTENEDORES Desde hace mucho tiempo, las empresas que transportan sus activos por medio de contenedores,
SEGURIDAD Y MONITOREO DE CONTENEDORES LA SOLUCIÓN INTEGRAL Y EFECTIVA PARA EL SEGUIMIENTO Y MONITOREO DE CONTENEDORES Desde hace mucho tiempo, las empresas que transportan sus activos por medio de contenedores,
FACULTAD DE INGENIERÍA
 FACULTAD DE INGENIERÍA FORMACIÓN EN INGENIERÍA DE SOFTWARE Y BASES DE DATOS EN LOS ESTUDIANTES DE LA CARRERA DE ING. EN COMPUTACIÓN DE LA FI, UNAM EN EL PLAN DE ESTUDIOS 2015 MAYO, 2015 Porcentaje de alumnos
FACULTAD DE INGENIERÍA FORMACIÓN EN INGENIERÍA DE SOFTWARE Y BASES DE DATOS EN LOS ESTUDIANTES DE LA CARRERA DE ING. EN COMPUTACIÓN DE LA FI, UNAM EN EL PLAN DE ESTUDIOS 2015 MAYO, 2015 Porcentaje de alumnos
Ingeniería Informática, Automática y Robótica: Claves para la Agricultura del Futuro
 Ingeniería Informática, Automática y Robótica: Claves para la Agricultura del Futuro Angela Ribeiro 28 de junio de 2016 Madrid Situación La población mundial (2015): 7.300 millones de personas Cada segundo
Ingeniería Informática, Automática y Robótica: Claves para la Agricultura del Futuro Angela Ribeiro 28 de junio de 2016 Madrid Situación La población mundial (2015): 7.300 millones de personas Cada segundo
Diadema Inalámbrica para Controlar Silla de Ruedas para Personas Tetrapléjicas
 Diadema Inalámbrica para Controlar Silla de Ruedas para Personas Tetrapléjicas Román Osorio, Elizabeth Coria 1, Rocío Santiago 1. Departamento de Ingeniería de Sistemas Computacionales y Automatización
Diadema Inalámbrica para Controlar Silla de Ruedas para Personas Tetrapléjicas Román Osorio, Elizabeth Coria 1, Rocío Santiago 1. Departamento de Ingeniería de Sistemas Computacionales y Automatización
Sistemas de localización
 Sistemas de localización Ponente: D. Manuel Ocaña Miguel Trabajo realizado por: Víctor Caballero Narro NIF: 09039892H Ingeniería de Telecomunicación Universidad de Alcalá de Henares Qué es la localización?
Sistemas de localización Ponente: D. Manuel Ocaña Miguel Trabajo realizado por: Víctor Caballero Narro NIF: 09039892H Ingeniería de Telecomunicación Universidad de Alcalá de Henares Qué es la localización?
Robótica y Linux. Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UPSAM
 Robótica y Linux Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UPSAM III Jornadas Software Libre, UPSAM
Robótica y Linux Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UPSAM III Jornadas Software Libre, UPSAM
PRÁCTICAS DE ROBÓTICA INDUSTRIAL [ABB 140] Práctica 2: Integración del IRB 140 en un sistema flexible de fabricación
![PRÁCTICAS DE ROBÓTICA INDUSTRIAL [ABB 140] Práctica 2: Integración del IRB 140 en un sistema flexible de fabricación](/thumbs/50/26557913.jpg "PRÁCTICAS DE ROBÓTICA INDUSTRIAL [ABB 140] Práctica 2: Integración del IRB 140 en un sistema flexible de fabricación") PRÁCTICAS DE ROBÓTICA INDUSTRIAL [ABB 140] Práctica 2: Integración del IRB 140 en un sistema flexible de fabricación Practica 2: Enunciado: INTEGRACIÓN DEL ROBOT IRB 140 EN UNA LÍNEA DE PRODUCCIÓN La práctica
PRÁCTICAS DE ROBÓTICA INDUSTRIAL [ABB 140] Práctica 2: Integración del IRB 140 en un sistema flexible de fabricación Practica 2: Enunciado: INTEGRACIÓN DEL ROBOT IRB 140 EN UNA LÍNEA DE PRODUCCIÓN La práctica
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN
 TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Microcontroladores para instrumentación y control. 2.
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN HOJA DE ASIGNATURA CON DESGLOSE DE UNIDADES TEMÁTICAS 1. Nombre de la asignatura Microcontroladores para instrumentación y control. 2.
Diseño y Realización de un Prototipo de Vehículo Auto-Balanceado
 Diseño y Realización de un Prototipo de Vehículo Auto-Balanceado V. Madero, J. A. Correa, F. Gordillo, F. Salas, J. Aracil Dpto. Ingeniería de Sistemas y Automática Universidad de Sevilla 11 de Abril de
Diseño y Realización de un Prototipo de Vehículo Auto-Balanceado V. Madero, J. A. Correa, F. Gordillo, F. Salas, J. Aracil Dpto. Ingeniería de Sistemas y Automática Universidad de Sevilla 11 de Abril de
Integración de LabVIEW y SolidWorks para Diseño Mecatrónico
 Integración de LabVIEW y SolidWorks para Diseño Mecatrónico Carlos Pazos Technical Marketing Engineer National Instruments Mexico Agenda Concepto de Mecatrónica en Diseño Diseño de un Modelo en Solidworks
Integración de LabVIEW y SolidWorks para Diseño Mecatrónico Carlos Pazos Technical Marketing Engineer National Instruments Mexico Agenda Concepto de Mecatrónica en Diseño Diseño de un Modelo en Solidworks
Universidad Autónoma de Guerrero Unidad Académica de Ingeniería.
 Qué es la robótica? Introducción a la robótica Sesión 1: Introducción Eric Rodríguez Peralta Ingeniería en computación Plan 2004 Ciencia multidisciplinaria Se ocupa de todo lo concerniente al diseño y
Qué es la robótica? Introducción a la robótica Sesión 1: Introducción Eric Rodríguez Peralta Ingeniería en computación Plan 2004 Ciencia multidisciplinaria Se ocupa de todo lo concerniente al diseño y
Arquitectura de un Controlador Electrónico de Procesos
 Arquitectura de un Controlador Electrónico de Procesos Unidad Central de Procesamiento (CPU) La unidad central de procesamiento es el elemento más importante de un controlador electrónico de procesos.
Arquitectura de un Controlador Electrónico de Procesos Unidad Central de Procesamiento (CPU) La unidad central de procesamiento es el elemento más importante de un controlador electrónico de procesos.
Automatización Industrial y Robótica PLANIFICACIONES Actualización: 1ºC/2018. Planificaciones Automatización Industrial y Robótica
 Planificaciones 9206 - Automatización Industrial y Robótica Docente responsable: NITTI ALEJANDRO LEONARDO 1 de 7 OBJETIVOS Introducir a los estudiantes en el diseño, especificación y desarrollo de sistemas
Planificaciones 9206 - Automatización Industrial y Robótica Docente responsable: NITTI ALEJANDRO LEONARDO 1 de 7 OBJETIVOS Introducir a los estudiantes en el diseño, especificación y desarrollo de sistemas
Sesión II: Elementos de un Robot
 Sesión II: Elementos de un Robot Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Sesiones Robótica Comunidad de Madrid, UPSAM Abr, 2005 ÍNDICE Introducción Estructura mecánica Motores
Sesión II: Elementos de un Robot Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Sesiones Robótica Comunidad de Madrid, UPSAM Abr, 2005 ÍNDICE Introducción Estructura mecánica Motores
SEGUNDO SEMESTRE: CÓDIGO ASIGNATURA REQUISITO T P L U 0250 ÁLGEBRA LINEAL Y GEOMETRÍA CALCULO II
 I-CICLO COMÚN:- BÁSICO [TOTAL CICLO COMÚN:141 U] PRIMER SEMESTRE: 0331 FISICA GENERAL I - 4 2-5 0251 CALCULO I - 3 3-5 0012 INTRODUCCIÓN A LA INGENIERÍA - 1 2-2 0183 LENGUA Y COMUNICACIÓN - 1 2-2 0551
I-CICLO COMÚN:- BÁSICO [TOTAL CICLO COMÚN:141 U] PRIMER SEMESTRE: 0331 FISICA GENERAL I - 4 2-5 0251 CALCULO I - 3 3-5 0012 INTRODUCCIÓN A LA INGENIERÍA - 1 2-2 0183 LENGUA Y COMUNICACIÓN - 1 2-2 0551
SEMBRADORA STP G CALIDAD QUE HACE CRECER
 SEMBRADORA STP G SEMBRADORA STP G CALIDAD QUE HACE CRECER PÁG. 02 DESPEJE ANCHO DE TRASLADO El gran despeje del equipo facilita el traslado en terrenos ondulados. Su ancho de traslado en ruta es de 3,60
SEMBRADORA STP G SEMBRADORA STP G CALIDAD QUE HACE CRECER PÁG. 02 DESPEJE ANCHO DE TRASLADO El gran despeje del equipo facilita el traslado en terrenos ondulados. Su ancho de traslado en ruta es de 3,60
3. Pan & Tilt. 3.1.Parte mecánica del pan & tilt
 3. Pan & Tilt Para poder orientar la cámara tanto horizontalmente como verticalmente, se ha montado sobre un pan & tilt. Así, de esta forma, es posible ajustar el ángulo horizontal (Pan) y el vertical
3. Pan & Tilt Para poder orientar la cámara tanto horizontalmente como verticalmente, se ha montado sobre un pan & tilt. Así, de esta forma, es posible ajustar el ángulo horizontal (Pan) y el vertical
6 de Mayo Bogotá, Colombia. ni.com/colombia o (1)
") 6 de Mayo Bogotá, Colombia ni.com/colombia 01 8000 513680 o (1) 482.4888 Simulaciones Mecánicas con SolidWorks y LabVIEW Carlos Pazos Technical Marketing Engineer National Instruments Mexico Agenda Concepto
6 de Mayo Bogotá, Colombia ni.com/colombia 01 8000 513680 o (1) 482.4888 Simulaciones Mecánicas con SolidWorks y LabVIEW Carlos Pazos Technical Marketing Engineer National Instruments Mexico Agenda Concepto
MAESTRÍA EN ELECTRÓNICA Y AUTOMATIZACIÓN, MENCIÓN SISTEMAS DE CONTROL. Malla Curricular
 MAESTRÍA EN ELECTRÓNICA Y AUTOMATIZACIÓN, MENCIÓN SISTEMAS DE CONTROL Remitir su hoja de vida y documentación de respaldo al correo: edgarpcordovac@uta.edu.ec Sistemas Eléctricos y Electrónicos Titulación
MAESTRÍA EN ELECTRÓNICA Y AUTOMATIZACIÓN, MENCIÓN SISTEMAS DE CONTROL Remitir su hoja de vida y documentación de respaldo al correo: edgarpcordovac@uta.edu.ec Sistemas Eléctricos y Electrónicos Titulación
U.F.A.ESPEL. Bustamante, Guamán. Plataforma para personas en silla de ruedas con visión artificial 1
 U.F.A.ESPEL. Bustamante, Guamán. Plataforma para personas en silla de ruedas con visión artificial 1 DISEÑO Y CONSTRUCCIÓN DE UNA PLATAFORMA AUTOMÁTICA Y UTILIZACIÓN DE VISIÓN ARTIFICIAL EN BUSES URBANOS,
U.F.A.ESPEL. Bustamante, Guamán. Plataforma para personas en silla de ruedas con visión artificial 1 DISEÑO Y CONSTRUCCIÓN DE UNA PLATAFORMA AUTOMÁTICA Y UTILIZACIÓN DE VISIÓN ARTIFICIAL EN BUSES URBANOS,
Sistema distribuido para monitorización y supervisión de procesos basado en componentes de bajo coste.
 LC-DAq Sistema distribuido para monitorización y supervisión de procesos basado en componentes de bajo coste. 1. Introducción. Los sistemas de adquisición de datos o adquisición de señales son sistemas
LC-DAq Sistema distribuido para monitorización y supervisión de procesos basado en componentes de bajo coste. 1. Introducción. Los sistemas de adquisición de datos o adquisición de señales son sistemas
Dobladora con Potencia Servo-Dual. EG Series EG 6013, EG 6013 AR
 Dobladora con Potencia Servo-Dual EG Series EG 6013, EG 6013 AR Dobladora EG Series Una solución compacta para doblado de alta velocidad y precisión con un avanzado y preciso sistema de accionamiento de
Dobladora con Potencia Servo-Dual EG Series EG 6013, EG 6013 AR Dobladora EG Series Una solución compacta para doblado de alta velocidad y precisión con un avanzado y preciso sistema de accionamiento de
Lazos de Control. Procesamiento COMPARADOR. Pulsos de control TECLADO CONTROL. Señales de realimentación CORRECTOR MOTOR (L.C.) TACODÍNAMO CARRO GUÍA
 TACODÍNAMO CARRO GUÍA") Lazos de Control Lazo abierto (L.A) Lazo cerrado (L.C.) PC TECLADO CONTROL Pulsos de control Procesamiento COMPARADOR Señales de realimentación CORRECTOR TRANSDUCTOR DE POSICION TACODÍNAMO MOTOR (L.C.)
Lazos de Control Lazo abierto (L.A) Lazo cerrado (L.C.) PC TECLADO CONTROL Pulsos de control Procesamiento COMPARADOR Señales de realimentación CORRECTOR TRANSDUCTOR DE POSICION TACODÍNAMO MOTOR (L.C.)
ROBOTICA por OLLERO BATURONE Editorial Marcombo. Foreword Prólogo Prefacio del autor
 ROBOTICA por OLLERO BATURONE Editorial Marcombo Foreword Prólogo Prefacio del autor CAPÍTULO 1. Introducción 1.1. Robótica 1.2. Esquema general del sistema robot 1.3. Robots manipuladores 1.3.1. Sistema
ROBOTICA por OLLERO BATURONE Editorial Marcombo Foreword Prólogo Prefacio del autor CAPÍTULO 1. Introducción 1.1. Robótica 1.2. Esquema general del sistema robot 1.3. Robots manipuladores 1.3.1. Sistema
AEROGENERADORES DE 3 Y 5 PALAS HASTA 3.000W
 A E RO AEROGENERADORES DE 3 Y 5 PALAS HASTA 3.000W Aerogeneradores con salida 12, 24 y 48 V. Con potencias de 300W, 600W Y 1000W en tres palas y 400W, 1.000W Y 3.000W en 5 palas. Llevan incorporado el
A E RO AEROGENERADORES DE 3 Y 5 PALAS HASTA 3.000W Aerogeneradores con salida 12, 24 y 48 V. Con potencias de 300W, 600W Y 1000W en tres palas y 400W, 1.000W Y 3.000W en 5 palas. Llevan incorporado el
Índice de Contenidos. Ultrasonidos (I)
") Índice de Contenidos 1. INTRODUCCIÓN A LOS SENSORES PARA POSICIONAMIENTO DE ROBOTS MÓVILES 1.1. Conceptos previos 1.2. Clasificación de sensores y algoritmos de posicionamiento asociados 2. SENSORES PARA
Índice de Contenidos 1. INTRODUCCIÓN A LOS SENSORES PARA POSICIONAMIENTO DE ROBOTS MÓVILES 1.1. Conceptos previos 1.2. Clasificación de sensores y algoritmos de posicionamiento asociados 2. SENSORES PARA
Table of Contents. Table of Contents UniTrain Cursos UniTrain Cursos UniTrain de tecnología de mecatrónica IMS 1.2 Sistema de transporte de DC
 Table of Contents Table of Contents UniTrain Cursos UniTrain Cursos UniTrain de tecnología de mecatrónica IMS 1.2 Sistema de transporte de DC 1 2 2 3 4 Lucas Nülle GmbH Página 1/8 www.lucas-nuelle.es UniTrain
Table of Contents Table of Contents UniTrain Cursos UniTrain Cursos UniTrain de tecnología de mecatrónica IMS 1.2 Sistema de transporte de DC 1 2 2 3 4 Lucas Nülle GmbH Página 1/8 www.lucas-nuelle.es UniTrain
PROYECTO DE GRADO PREVIO A LA OBTENCIÓN DEL TÍTULO ACADÉMICO DE: INGENIERO AUTOMOTRIZ TEMA:
 PROYECTO DE GRADO PREVIO A LA OBTENCIÓN DEL TÍTULO ACADÉMICO DE: INGENIERO AUTOMOTRIZ TEMA: DISEÑO E INSTALACIÓN DE UN SISTEMA DE RASTREO SATELITAL MEDIANTE GPS Y GPRS PARA EL VEHÍCULO CHEVROLET-AVEO DE
PROYECTO DE GRADO PREVIO A LA OBTENCIÓN DEL TÍTULO ACADÉMICO DE: INGENIERO AUTOMOTRIZ TEMA: DISEÑO E INSTALACIÓN DE UN SISTEMA DE RASTREO SATELITAL MEDIANTE GPS Y GPRS PARA EL VEHÍCULO CHEVROLET-AVEO DE
IMPLEMENTACIÓN DE UNA RED INALÁMBRICA QUE PERMITA OPERAR UNA PLATAFORMA MÓVIL CON TRANSMISIÓN Y ALMACENAMIENTO DE VIDEO, MEDIANTE TECNOLOGÍA WIFI.
 IMPLEMENTACIÓN DE UNA RED INALÁMBRICA QUE PERMITA OPERAR UNA PLATAFORMA MÓVIL CON TRANSMISIÓN Y ALMACENAMIENTO DE VIDEO, MEDIANTE TECNOLOGÍA WIFI. UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS November
IMPLEMENTACIÓN DE UNA RED INALÁMBRICA QUE PERMITA OPERAR UNA PLATAFORMA MÓVIL CON TRANSMISIÓN Y ALMACENAMIENTO DE VIDEO, MEDIANTE TECNOLOGÍA WIFI. UNIVERSIDAD DISTRITAL FRANCISCO JOSE DE CALDAS November
Robótica en la Universidad
 Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Índice de Contenidos
 Índice de Contenidos CAPÍTULO 1 INTRODUCCION... 12 1.1 El problema (o la oportunidad)... 13 1.2 Objetivo General... 13 1.3 Objetivos específicos... 13 1.5 Alcances y limitaciones... 15 Capítulo 2 MARCO
Índice de Contenidos CAPÍTULO 1 INTRODUCCION... 12 1.1 El problema (o la oportunidad)... 13 1.2 Objetivo General... 13 1.3 Objetivos específicos... 13 1.5 Alcances y limitaciones... 15 Capítulo 2 MARCO
Localización. CI-2657 Robótica M.Sc. Kryscia Ramírez Benavides
 M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy?. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de llegar? Planificación
M.Sc. Kryscia Ramírez Benavides Problemas de Navegación de los Robots Dónde estoy?. Dónde he estado? Mapa de decisiones. A dónde voy? Planificación de misiones. Cuál es la mejor manera de llegar? Planificación
Planificaciones Seminario de Electrónica II. Docente responsable: MAS IGNACIO AGUSTÍN. 1 de 5
 Planificaciones 6666 - Seminario de Electrónica II Docente responsable: MAS IGNACIO AGUSTÍN 1 de 5 OBJETIVOS El objetivo de este curso es que el alumno: - adquiera los conceptos básicos de estado del arte
Planificaciones 6666 - Seminario de Electrónica II Docente responsable: MAS IGNACIO AGUSTÍN 1 de 5 OBJETIVOS El objetivo de este curso es que el alumno: - adquiera los conceptos básicos de estado del arte
2.399, , , , 00 APP SMARTPHONE IVA IVA IVA IVA LR2 NR76 LR1 NR76 XR LT2 NR , , , 00 2.
 3 AÑOS * G A R A N TÍA 200 l. 200 l. LR1 NR76 2.292, 55 1.899, 00 76 cm. Cub Cadet OHV. 420 cc. Potencia nominal: 8,2 kw. / 2.900 min -1 Potencia máxima: 8,7 kw. / 3.600 min -1 Transmática LR2 NR76 2.828,
3 AÑOS * G A R A N TÍA 200 l. 200 l. LR1 NR76 2.292, 55 1.899, 00 76 cm. Cub Cadet OHV. 420 cc. Potencia nominal: 8,2 kw. / 2.900 min -1 Potencia máxima: 8,7 kw. / 3.600 min -1 Transmática LR2 NR76 2.828,
CONTROL Y MONITOREO LOGÍSTICO
 CONTROL Y MONITOREO LOGÍSTICO LA SOLUCIÓN FLEXIBLE PARA EL CONTROL DE RUTAS, MERCADERÍA Y MONITOREO DE APERTURA Y CIERRE DE PUERTAS DE CAMIONES, FURGONES Y CAMIONETAS DE DISTRIBUCIÓN Desde hace mucho tiempo,
CONTROL Y MONITOREO LOGÍSTICO LA SOLUCIÓN FLEXIBLE PARA EL CONTROL DE RUTAS, MERCADERÍA Y MONITOREO DE APERTURA Y CIERRE DE PUERTAS DE CAMIONES, FURGONES Y CAMIONETAS DE DISTRIBUCIÓN Desde hace mucho tiempo,
UPS interactivo serie AVR de 120V, 550VA y 300W, ultracompacto con puerto USB
 UPS interactivo serie AVR de 120V, 550VA y 300W, ultracompacto con puerto USB NÚMERO DE MODELO: AVR550U Destacado UPS interactivo ultracompacto de 550 VA 120 V Corrige las caídas de voltaje y sobrevoltajes
UPS interactivo serie AVR de 120V, 550VA y 300W, ultracompacto con puerto USB NÚMERO DE MODELO: AVR550U Destacado UPS interactivo ultracompacto de 550 VA 120 V Corrige las caídas de voltaje y sobrevoltajes
Ascensor Neumático PVE37 (2 personas)
") Ascensor Neumático PVE37 () ESPECIFICACIONES TÉCNICAS Generales Diámetro exterior del cilindro: 933 mm Carga máxima: 205 kg (Dos personas) Velocidad: 0.15 m/s No requiere foso. El suelo de planta baja
Ascensor Neumático PVE37 () ESPECIFICACIONES TÉCNICAS Generales Diámetro exterior del cilindro: 933 mm Carga máxima: 205 kg (Dos personas) Velocidad: 0.15 m/s No requiere foso. El suelo de planta baja
INGENIERO AUTOMOTRIZ
 Tesis presentada como requisito previo a la obtención del grado de: INGENIERO AUTOMOTRIZ AUTORES: ROBERTO JAVIER LARA LARA ESTEBAN ANDRES LORA MENA Diseñar e instalar un sistema configurable basado en
Tesis presentada como requisito previo a la obtención del grado de: INGENIERO AUTOMOTRIZ AUTORES: ROBERTO JAVIER LARA LARA ESTEBAN ANDRES LORA MENA Diseñar e instalar un sistema configurable basado en
Ascensor Neumático PVE30 (Unipersonal)
") Ascensor Neumático PVE30 () Ascensor Neumático ESPECIFICACIONES TÉCNICAS Generales Diámetro exterior del cilindro: 750mm Carga máxima: 159 kg (Una persona) Velocidad: 0.15 m/s No requiere foso. El suelo
Ascensor Neumático PVE30 () Ascensor Neumático ESPECIFICACIONES TÉCNICAS Generales Diámetro exterior del cilindro: 750mm Carga máxima: 159 kg (Una persona) Velocidad: 0.15 m/s No requiere foso. El suelo
Asociación Argentina de Control Automático Primera Jornada AADECA sobre: CONTROL DE MOVIMIENTOS 8 de junio de 2010
 Unidad de Control Eje 1 Periferia PLC Eje 2 HMI Eje 3 Principios funcionales (Circuito de Potencia) Principios funcionales (Circuito de Control del PWM) Unidades Rectificadoras (Tiristores e IGBTs) Rectificación
Unidad de Control Eje 1 Periferia PLC Eje 2 HMI Eje 3 Principios funcionales (Circuito de Potencia) Principios funcionales (Circuito de Control del PWM) Unidades Rectificadoras (Tiristores e IGBTs) Rectificación
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES
 INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE SENSORES Y ACTUADORES PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno integrará sensores y actuadores a sistemas de control
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE SENSORES Y ACTUADORES PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno integrará sensores y actuadores a sistemas de control
Asociación de Robótica de la Universidad Carlos III de Madrid
 Asociación de Robótica de la Universidad Carlos III de Madrid Participación del grupo de robótica mini-humanoides en concursos de robótica y mejora de las capacidades hardware/software de los robots. XXI
Asociación de Robótica de la Universidad Carlos III de Madrid Participación del grupo de robótica mini-humanoides en concursos de robótica y mejora de las capacidades hardware/software de los robots. XXI
Fundamentos en Robótica. Unidad 2.2 Elementos estructurales
 Fundamentos en Robótica Unidad 2.2 Elementos estructurales Temario Chasis Sensores Articulaciones Actuadores Plataformas de cómputo Suministro de Energía Comunicaciones Actuadores medio sensores control
Fundamentos en Robótica Unidad 2.2 Elementos estructurales Temario Chasis Sensores Articulaciones Actuadores Plataformas de cómputo Suministro de Energía Comunicaciones Actuadores medio sensores control
Multirotor Fenix 3d. Desarrollos tecnológicos para la prevención y monitoreo de incendios forestales y erupciones volcánicas
 Desarrollos tecnológicos para la prevención y monitoreo de incendios forestales y erupciones volcánicas GPS Trasmisión de video en vivo Cámara Térmica Auto navegador Cámara HD Radio control largo alcance
Desarrollos tecnológicos para la prevención y monitoreo de incendios forestales y erupciones volcánicas GPS Trasmisión de video en vivo Cámara Térmica Auto navegador Cámara HD Radio control largo alcance
SU10KRT3/1XPM Módulo de potencia con cable de conexión para módulo de batería y accesorios para instalación en General
 UPS de doble conversión, en línea SmartOnline de 200-240V, 10kVA y 7kW, rack/torre de 6U, operación extendida, puerto SNMP pre-instalado, RS232, entrada trifásica-salida monofásica NÚMERO DE MODELO: SU10KRT3/1X
UPS de doble conversión, en línea SmartOnline de 200-240V, 10kVA y 7kW, rack/torre de 6U, operación extendida, puerto SNMP pre-instalado, RS232, entrada trifásica-salida monofásica NÚMERO DE MODELO: SU10KRT3/1X
Universidad Tecnológica Nacional Facultad Regional Buenos Aires Grupo de Inteligencia Artificial y Robótica. Seminario IA y R
 Página 1 de 6 2 Control Electrónico de plataforma móvil y brazo robótico Ing. Sergio Alberino, Ing. Pablo Folino 2.1 Introducción El diseño y construcción de un carro de transporte de instrumental, autónomo
Página 1 de 6 2 Control Electrónico de plataforma móvil y brazo robótico Ing. Sergio Alberino, Ing. Pablo Folino 2.1 Introducción El diseño y construcción de un carro de transporte de instrumental, autónomo
SENSOR REMOTO DE TEMPERATURA GRUPO: LIGHTNING PROYECTO
 SENSOR REMOTO DE TEMPERATURA GRUPO: LIGHTNING PROYECTO JR JURADO INGENIERIA MECATRONICA G12NL19 GUSTAVO PRADO INGENIERIA ELECTRONICA G12 NL 28 JOSE NICOLAS HERRERA TORRES INGENIERIA MECANICA G12NL28 UNIVERSIDAD
SENSOR REMOTO DE TEMPERATURA GRUPO: LIGHTNING PROYECTO JR JURADO INGENIERIA MECATRONICA G12NL19 GUSTAVO PRADO INGENIERIA ELECTRONICA G12 NL 28 JOSE NICOLAS HERRERA TORRES INGENIERIA MECANICA G12NL28 UNIVERSIDAD
TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN MECATRÓNICA
 TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN MECATRÓNICA DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE MEDICIÓN DE VELOCIDAD PARA VEHICULOS UTILIZANDO VISIÓN ARTIFICIAL IMPLEMENTADO
TRABAJO DE TITULACIÓN PREVIO A LA OBTENCIÓN DEL TÍTULO DE INGENIERO EN MECATRÓNICA DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA DE MEDICIÓN DE VELOCIDAD PARA VEHICULOS UTILIZANDO VISIÓN ARTIFICIAL IMPLEMENTADO
Qué es un robot? Robótica en Minería 6/8/10. Javier Ruiz del Solar Director. Advanced Mining Technology Center Universidad de Chile
 Robótica en Minería Javier Ruiz del Solar Director Advanced Mining Technology Center Universidad de Chile Qué es un robot?! Pregunta difícil de responder! Existen robots con! formas, funciones y tamaños:!!
Robótica en Minería Javier Ruiz del Solar Director Advanced Mining Technology Center Universidad de Chile Qué es un robot?! Pregunta difícil de responder! Existen robots con! formas, funciones y tamaños:!!
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES
 INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE DISEÑO DE SISTEMAS MECATRÓNICOS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno diseñará sistemas mecatrónicos a través
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE DISEÑO DE SISTEMAS MECATRÓNICOS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno diseñará sistemas mecatrónicos a través
AUDIFONOS. Sistema de reproducción automática por detección de zonas activas. Alex Posada indice
 AUDIFONOS Sistema de reproducción automática por detección de zonas activas. Alex Posada 2008 indice Funcionamiento Audífono Posicionamiento RFID Software, servidor y base de datos Presupuesto Funcionamiento
AUDIFONOS Sistema de reproducción automática por detección de zonas activas. Alex Posada 2008 indice Funcionamiento Audífono Posicionamiento RFID Software, servidor y base de datos Presupuesto Funcionamiento
Andrés Mejías Borrero
 Ubicación de la Tesis y Concepto de La Tesis se sitúa en la línea de investigación dedicada a la Educación en Ingeniería dentro del Grupo de Investigación Control y Robótica (TEP 192). El laboratorio Remoto
Ubicación de la Tesis y Concepto de La Tesis se sitúa en la línea de investigación dedicada a la Educación en Ingeniería dentro del Grupo de Investigación Control y Robótica (TEP 192). El laboratorio Remoto
Algoritmos de visión para plataformas mini-humanoide de competición con capacidades aumentadas
 Algoritmos de visión para plataformas mini-humanoide de competición con capacidades aumentadas Máster en Robótica y Automatización Trabajo de Fin de Máster Franklin Eduardo Samaniego Riera. 100294139@alumnos.uc3m.es
Algoritmos de visión para plataformas mini-humanoide de competición con capacidades aumentadas Máster en Robótica y Automatización Trabajo de Fin de Máster Franklin Eduardo Samaniego Riera. 100294139@alumnos.uc3m.es
Máquina de Pick & Place T8H
 Máquina de Pick & Place T8H Máquina Puntera de la Industria SMT Introducción: 1. El sistema de movimientos por levitación, junto con la estructura de mármol, hacen, que esta máquina sea, tecnológicamente,
Máquina de Pick & Place T8H Máquina Puntera de la Industria SMT Introducción: 1. El sistema de movimientos por levitación, junto con la estructura de mármol, hacen, que esta máquina sea, tecnológicamente,
plataformas SaLVaESCaLEraS INCLINaDaS Supra Y Supra LINEa
 plataformas SaLVaESCaLEraS INCLINaDaS Supra Y Supra LINEa Supra LINEa - para escaleras rectas Supra Línea puede ser considerada sin duda alguna el pináculo de nuestra extensa experiencia en plataformas
plataformas SaLVaESCaLEraS INCLINaDaS Supra Y Supra LINEa Supra LINEa - para escaleras rectas Supra Línea puede ser considerada sin duda alguna el pináculo de nuestra extensa experiencia en plataformas
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES
 INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CONTROL DE MOTORES ELÉCTRICOS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno controlará motores eléctricos mediante
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE CONTROL DE MOTORES ELÉCTRICOS PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno controlará motores eléctricos mediante
DRON DJI MAVIC AERONAVE. H83mm x W83mm x L198mm. Tamaño en diagonal (Hélices excluidos) 1,64 libras (743 g) (incluyen la cobertura de cardán)
 1,64 libras (743 g) (incluyen la cobertura de cardán)") DRON DJI MAVIC AERONAVE Doblada H83mm x W83mm x L198mm Tamaño en diagonal (Hélices excluidos) 335 mm Peso (batería y Propulsores Incluido) 1.62 lbs (734 g) (excluya la cubierta de cardán) 1,64 libras (743
DRON DJI MAVIC AERONAVE Doblada H83mm x W83mm x L198mm Tamaño en diagonal (Hélices excluidos) 335 mm Peso (batería y Propulsores Incluido) 1.62 lbs (734 g) (excluya la cubierta de cardán) 1,64 libras (743
CONTROL REMOTO DE ROBOTS USANDO MÓDULOS DE RADIOFRECUENCIA XBEE A 2.4GHZ CON CAPACIDAD DE COMUNICACIÓN SERIAL A DATALOGGER E INTERFAZ GRÁFICA
 CONTROL REMOTO DE ROBOTS USANDO MÓDULOS DE RADIOFRECUENCIA XBEE A 2.4GHZ CON CAPACIDAD DE COMUNICACIÓN SERIAL A DATALOGGER E INTERFAZ GRÁFICA CARLOS ANDRÉS CARRERA CADENA LUIS MIGUEL GUAIÑA MEJÍA DATALOGGER/
CONTROL REMOTO DE ROBOTS USANDO MÓDULOS DE RADIOFRECUENCIA XBEE A 2.4GHZ CON CAPACIDAD DE COMUNICACIÓN SERIAL A DATALOGGER E INTERFAZ GRÁFICA CARLOS ANDRÉS CARRERA CADENA LUIS MIGUEL GUAIÑA MEJÍA DATALOGGER/
AREA FORESTAL AREA MINERA AREA PORTUARIA AREA INDUSTRIAL
 AREA FORESTAL AREA MINERA AREA PORTUARIA AREA INDUSTRIAL SERVICIO TECNICO Banco de Pruebas Eléctrico Banco de pruebas de motores de partida y alternadores. Modelo EB380 TRUCK Italia. Potencia 10 HP. Reparación
AREA FORESTAL AREA MINERA AREA PORTUARIA AREA INDUSTRIAL SERVICIO TECNICO Banco de Pruebas Eléctrico Banco de pruebas de motores de partida y alternadores. Modelo EB380 TRUCK Italia. Potencia 10 HP. Reparación
Síntesis de la programación
 Síntesis de la programación Robótica industrial 2º ARI 22 de febrero de 2017 Tabla de Contenidos 1. Secuenciación de contenidos...1 2. Unidades de trabajo...2 2.1. Programación de una estación para fabricación
Síntesis de la programación Robótica industrial 2º ARI 22 de febrero de 2017 Tabla de Contenidos 1. Secuenciación de contenidos...1 2. Unidades de trabajo...2 2.1. Programación de una estación para fabricación
UPS interactivo SmartPro de 120V 3kVA 2.4kW, torre, operación prolongada, 3 puertos DB9
 UPS interactivo SmartPro de 120V 3kVA 2.4kW, torre, operación prolongada, 3 puertos DB9 NÚMERO DE MODELO: SMART3000NET Destacado UPS de autonomía extendida en torre, interactivo de 3kVA / 3000VA / 2400W
UPS interactivo SmartPro de 120V 3kVA 2.4kW, torre, operación prolongada, 3 puertos DB9 NÚMERO DE MODELO: SMART3000NET Destacado UPS de autonomía extendida en torre, interactivo de 3kVA / 3000VA / 2400W
Ascensor Neumático UB52 (3 personas - Silla de Ruedas)
") Ascensor Neumático UB52 (3 personas - Silla de Ruedas) Ascensor Neumático UB52 (1316) 3 personas - Silla de Ruedas UB52 (1316) Dossier Informativo ESPECIFICACIONES TÉCNICAS Generales Diámetro exterior
Ascensor Neumático UB52 (3 personas - Silla de Ruedas) Ascensor Neumático UB52 (1316) 3 personas - Silla de Ruedas UB52 (1316) Dossier Informativo ESPECIFICACIONES TÉCNICAS Generales Diámetro exterior
UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO CENTRO DE FÍSICA APLICADA Y TECNOLOGÍA AVANZADA Y FACULTAD DE ESTUDIOS SUPERIORES CUAUTITLÁN
 198 UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO CENTRO DE FÍSICA APLICADA Y TECNOLOGÍA AVANZADA Y FACULTAD DE ESTUDIOS SUPERIORES CUAUTITLÁN Carrera: Licenciatura en Tecnología Programa de la Asignatura: INSTRUMENTACIÓN
198 UNIVERSIDAD NACIONAL AUTÓNOMA DE MÉXICO CENTRO DE FÍSICA APLICADA Y TECNOLOGÍA AVANZADA Y FACULTAD DE ESTUDIOS SUPERIORES CUAUTITLÁN Carrera: Licenciatura en Tecnología Programa de la Asignatura: INSTRUMENTACIÓN
Control de Motores y Visión Artificial para Celdas de Manufactura
 Control de Motores y Visión Artificial para Celdas de Manufactura Salvador Mikel Academic Program Manager National Instruments Mexico Agenda Aplicaciones y Sistemas de Control de Movimiento Plataforma
Control de Motores y Visión Artificial para Celdas de Manufactura Salvador Mikel Academic Program Manager National Instruments Mexico Agenda Aplicaciones y Sistemas de Control de Movimiento Plataforma
ESCUELA SUPERIOR POLITÉCNICA DE CHIMBORAZO. ING. MIGUEL PÉREZ MSc
 ESCUELA SUPERIOR POLITÉCNICA DE CHIMBORAZO ING. MIGUEL PÉREZ MSc DISEÑO Y SIMULACIÓN DE ROBOT MÓVIL, PARA LA INSPECCIÓN DE LÍNEAS ELÉCTRICAS PLANTEAMINETO DEL PROBLEMA La dificultad en la inspección de
ESCUELA SUPERIOR POLITÉCNICA DE CHIMBORAZO ING. MIGUEL PÉREZ MSc DISEÑO Y SIMULACIÓN DE ROBOT MÓVIL, PARA LA INSPECCIÓN DE LÍNEAS ELÉCTRICAS PLANTEAMINETO DEL PROBLEMA La dificultad en la inspección de
Contenido. Capítulo 1 Bienvenido a Arduino y Visual Basic.NET 1. Capítulo 2 Aspectos generales de la programación en Visual Basic.
 Capítulo 1 Bienvenido a Arduino y Visual Basic.NET 1 1.1 Introducción 2 1.2 Entorno de programación de Arduino IDE 2 1.2.1 Funciones básicas iniciales 2 1.2.2 Agregar comentarios 3 1.3 Conceptos básicos
Capítulo 1 Bienvenido a Arduino y Visual Basic.NET 1 1.1 Introducción 2 1.2 Entorno de programación de Arduino IDE 2 1.2.1 Funciones básicas iniciales 2 1.2.2 Agregar comentarios 3 1.3 Conceptos básicos
Sistema de Monitoreo de Salud de Nodos WSN Alimentados a Energía Solar
 Sistema de Monitoreo de Salud de Nodos Alimentados a Solar Trabajo Final Carrera de Especialización en Sistemas Embebidos Facultad de Ingeniería - Universidad de Buenos Aires Esp. Ing. Juan V. Montilla
Sistema de Monitoreo de Salud de Nodos Alimentados a Solar Trabajo Final Carrera de Especialización en Sistemas Embebidos Facultad de Ingeniería - Universidad de Buenos Aires Esp. Ing. Juan V. Montilla
UNIDAD 1: INTRODUCCIÓN A LOS SISTEMAS AUTOMATIZADOS
 UNIVERSIDAD ALONSO DE OJEDA FACULTAD DE INGENIERÍA ESCUELA DE COMPUTACIÓN AUTOMATIZACIÓN UNIDAD 1: INTRODUCCIÓN A LOS SISTEMAS AUTOMATIZADOS AUTOR: ING. GERARDO ALBERTO LEAL, MSc Concepto de Automatización.
UNIVERSIDAD ALONSO DE OJEDA FACULTAD DE INGENIERÍA ESCUELA DE COMPUTACIÓN AUTOMATIZACIÓN UNIDAD 1: INTRODUCCIÓN A LOS SISTEMAS AUTOMATIZADOS AUTOR: ING. GERARDO ALBERTO LEAL, MSc Concepto de Automatización.
UPS standby BC Personal de 120V, 350VA y 180W, escritorio ultracompacto, 6 tomacorrientes
 UPS standby BC Personal de 120V, 350VA y 180W, escritorio ultracompacto, 6 tomacorrientes NÚMERO DE MODELO: BC350 Destacado UPS Standby ultracompacto de 120V, 350VA Mantiene la salida de CA durante fallas
UPS standby BC Personal de 120V, 350VA y 180W, escritorio ultracompacto, 6 tomacorrientes NÚMERO DE MODELO: BC350 Destacado UPS Standby ultracompacto de 120V, 350VA Mantiene la salida de CA durante fallas
Bicicletas Eléctricas
 No aplica Pico y Placa INTERNATIONAL No requieren de Pase Bicicletas Eléctricas MODELOS 2016 Éxito total en ventas Separa la tuya Gratis Chaleco, Casto Y 1 mantenimiento Productos y Servicios Modelos Accesorios
No aplica Pico y Placa INTERNATIONAL No requieren de Pase Bicicletas Eléctricas MODELOS 2016 Éxito total en ventas Separa la tuya Gratis Chaleco, Casto Y 1 mantenimiento Productos y Servicios Modelos Accesorios
MERCURY ROBOT CHALLENGE LATINOAMÉRICA
 MERCURY ROBOT CHALLENGE LATINOAMÉRICA EQUIPO MAGTRÓNICA 2017 2 ANTONIO MARTÍNEZ RICARDO PUPO DANIEL CABAS MIGUEL POLO Pág. AGRADECIMIENTOS 4 RESUMEN 5 1.0 DESCRIPCIÓN DEL ROBOT..5 1.1 DISEÑOS MECÁNICOS
MERCURY ROBOT CHALLENGE LATINOAMÉRICA EQUIPO MAGTRÓNICA 2017 2 ANTONIO MARTÍNEZ RICARDO PUPO DANIEL CABAS MIGUEL POLO Pág. AGRADECIMIENTOS 4 RESUMEN 5 1.0 DESCRIPCIÓN DEL ROBOT..5 1.1 DISEÑOS MECÁNICOS
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE INTEGRACIÓN DE SISTEMAS AUTOMÁTICOS
 TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE INTEGRACIÓN DE SISTEMAS AUTOMÁTICOS 1. Competencias Desarrollar y conservar sistemas automatizados
TÉCNICO SUPERIOR UNIVERSITARIO EN MECATRÓNICA ÁREA AUTOMATIZACIÓN EN COMPETENCIAS PROFESIONALES ASIGNATURA DE INTEGRACIÓN DE SISTEMAS AUTOMÁTICOS 1. Competencias Desarrollar y conservar sistemas automatizados
ERA Módem GSM con 8 DI y 2 Relés + 4 DO (open colector) Características. Aplicaciones
 Características. Aplicaciones") Módem GSM con 8 DI y 2 Relés + 4 DO (open colector) El ERA-220 es un completo equipo de telecontrol vía GSM para entornos industriales que permite controlar desde un teléfono GSM el control remoto de alarmas
Módem GSM con 8 DI y 2 Relés + 4 DO (open colector) El ERA-220 es un completo equipo de telecontrol vía GSM para entornos industriales que permite controlar desde un teléfono GSM el control remoto de alarmas
Laboratorio distribuido con acceso remoto a través de RENATA para la experimentación en robótica
 Laboratorio distribuido con acceso remoto a través de RENATA para la experimentación en robótica Eduardo Caicedo Bravo Bayron Andrés Calvache Vallejo Eval Bladimir Bacca Cortés Jaiber Evelio Cardona Jaimer
Laboratorio distribuido con acceso remoto a través de RENATA para la experimentación en robótica Eduardo Caicedo Bravo Bayron Andrés Calvache Vallejo Eval Bladimir Bacca Cortés Jaiber Evelio Cardona Jaimer
PLB ASCENSOR GRUPO 2
 UNIVERSIDAD EUROPEA DE MADRID ESCUELA POLITÉCNICA GRADO EN INGENIERÍA MECÁNICA GRADO EN INGENIERÍA EN ORGANIZACIÓN INDUSTRIAL PROYECTO DE LA ASIGNATURA: AUTOMATISMOS Y CONTROL PLB ASCENSOR GRUPO 2 ROCÍO
UNIVERSIDAD EUROPEA DE MADRID ESCUELA POLITÉCNICA GRADO EN INGENIERÍA MECÁNICA GRADO EN INGENIERÍA EN ORGANIZACIÓN INDUSTRIAL PROYECTO DE LA ASIGNATURA: AUTOMATISMOS Y CONTROL PLB ASCENSOR GRUPO 2 ROCÍO
Reglamento Categoría ROBOT SEGUIDOR DE LINEA DESTREZA UME-BOT XI
 Reglamento Categoría ROBOT SEGUIDOR DE LINEA DESTREZA UME-BOT XI La Tecnología para bienestar del hombre y el progreso de la humanidad (UME 2017) Comité Organizador UME-BOT XI INTRODUCCION La Escuela Politécnica
Reglamento Categoría ROBOT SEGUIDOR DE LINEA DESTREZA UME-BOT XI La Tecnología para bienestar del hombre y el progreso de la humanidad (UME 2017) Comité Organizador UME-BOT XI INTRODUCCION La Escuela Politécnica
UPS Internet Office de reserva de 120V, 350VA y 180W, Escritorio ultracompacto, 6 tomacorrientes, puerto serial DB9
 Internet Office de reserva de 120V, 350VA y 180W, Escritorio ultracompacto, 6 tomacorrientes, puerto serial DB9 NÚMERO DE MODELO: INTERNET350SER Destacado Standby ultracompacto de 120V, 350VA Mantiene
Internet Office de reserva de 120V, 350VA y 180W, Escritorio ultracompacto, 6 tomacorrientes, puerto serial DB9 NÚMERO DE MODELO: INTERNET350SER Destacado Standby ultracompacto de 120V, 350VA Mantiene
ESCUELA POLITÉCNICA DEL EJÉRCITO EXTENSIÓN LATACUNGA NANCY VELASCO
 ESCUELA POLITÉCNICA DEL EJÉRCITO EXTENSIÓN LATACUNGA NANCY VELASCO Desarrollo e implementación de un algoritmo para detección de objetos con tecnología Kinect Justificación Apoyo a personas no videntes
ESCUELA POLITÉCNICA DEL EJÉRCITO EXTENSIÓN LATACUNGA NANCY VELASCO Desarrollo e implementación de un algoritmo para detección de objetos con tecnología Kinect Justificación Apoyo a personas no videntes
Carla Araque Cristian Sánchez
 Diseño e implementación de un sistema domótico inalámbrico basado en el protocolo de redes de comunicación Zigbee y sistema de supervisión HMI para la seguridad y eficiencia de consumo energético en hogares
Diseño e implementación de un sistema domótico inalámbrico basado en el protocolo de redes de comunicación Zigbee y sistema de supervisión HMI para la seguridad y eficiencia de consumo energético en hogares
Contenido. Prefacio... Acerca de los autores...
 Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
Contenido Prefacio... Acerca de los autores... xi xvi Capítulo 1. Introducción... 1 1.1. Antecedentes históricos... 2 1.2. Origen y desarrollo de la robótica... 8 1.3. Definición del Robot... 16 1.3.1.
INHIBIDOR DE RECLUSORIOS TC-200
 INHIBIDOR DE RECLUSORIOS TC-200 3 Bandas COD: 08-138 / 4 Bandas COD: 08-143 / 5 Bandas COD: 08-144 / 6 Bandas COD: 08-145 El Inhibidor de Reclusorios TC-200, es un bloqueador de potencia intermedia, que
INHIBIDOR DE RECLUSORIOS TC-200 3 Bandas COD: 08-138 / 4 Bandas COD: 08-143 / 5 Bandas COD: 08-144 / 6 Bandas COD: 08-145 El Inhibidor de Reclusorios TC-200, es un bloqueador de potencia intermedia, que