Diseño y Realización de un Prototipo de Vehículo Auto-Balanceado
|
|
|
- Clara San Segundo Reyes
- hace 7 años
- Vistas:
Transcripción
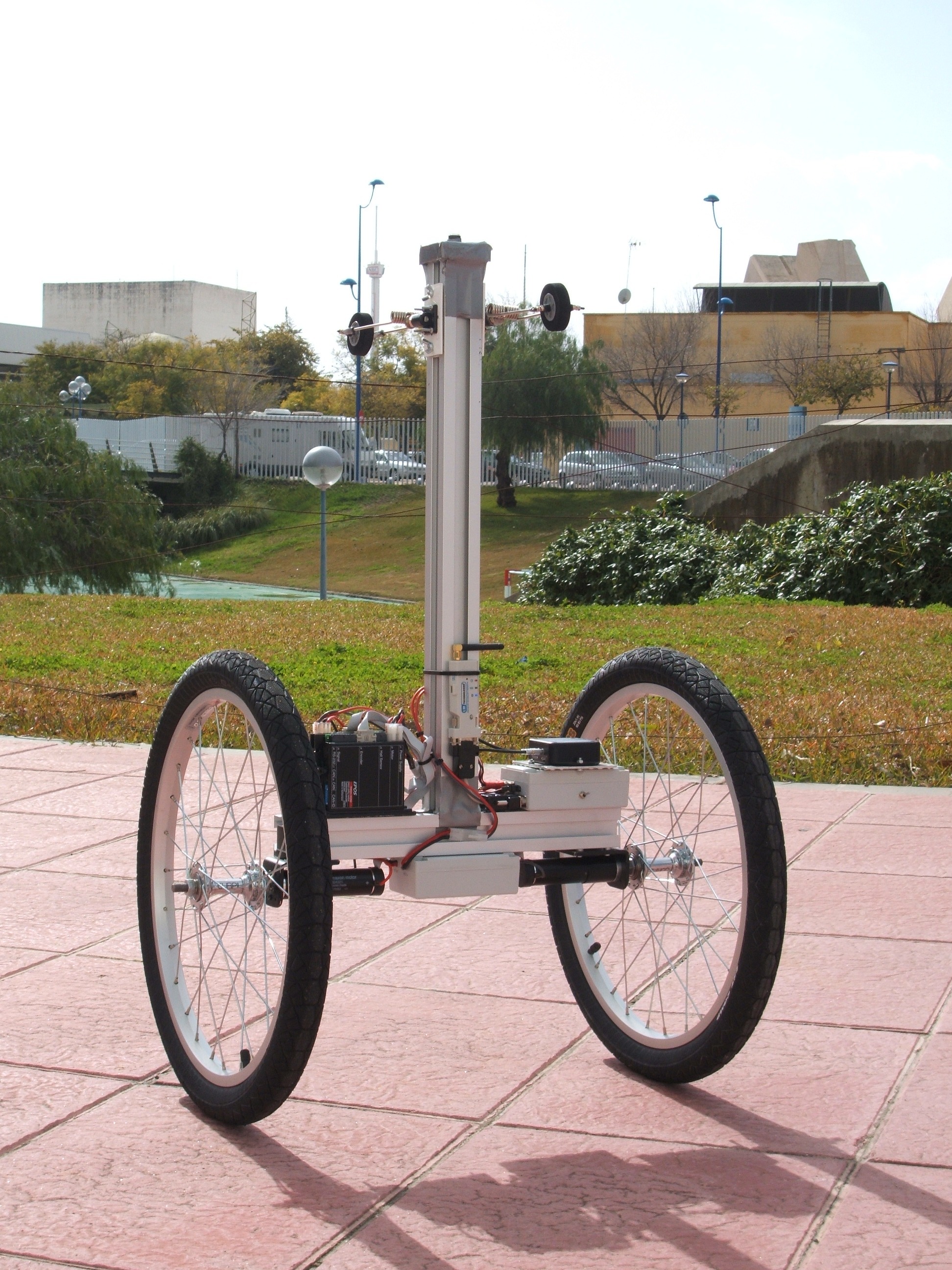
1 Diseño y Realización de un Prototipo de Vehículo Auto-Balanceado V. Madero, J. A. Correa, F. Gordillo, F. Salas, J. Aracil Dpto. Ingeniería de Sistemas y Automática Universidad de Sevilla 11 de Abril de 2011
2 Contenido
3 Contenido

4 Sistemas auto-balanceados: ampliamente extendidos y en creciente popularidad. Control y análisis de la cuenca de atracción: métodos lineales vs. no lineales. Vehículo tripulados vs. vehículos robóticos. Banco de prueba para leyes de control. Vehículo Auto-Balanceado (VAB) robótico.
5 Contenido
6 Contenido

7 Estructura de aluminio en forma de T invertida. Motores fijados a la estructura y con sus ejes alineados. Eje compartido entre péndulo y motores/ruedas. Ruedas desmontables. Distribución configurable de elementos sobre el chasis.
8 Contenido
9 (I) Placa µc MAVRIC-IIB: µc: ATmega128 Familia AVR R de 8 bits 128 KBytes de memoria flash programable Hasta 53 E/S digitales ADC de 8 canales Reloj interno de 16 MHz IMU: 3DM-GX1 de Microstrain R Codificador de 1024 ppv

10 (II) Motores DC RE-30 de MaxonMotor con reductora Controladora de motores a bajo nivel EPOS 24/5 de MaxonMotor Adaptador RS232-Bluetooth Baterías Li-Po
11 Contenido
12 TinyOS SO de código abierto para aplicaciones en sistemas embebidos. Dirigido a eventos y basado en componentes. Estructura jerárquica mediante módulos. NesC Meta-lenguaje de programación basado en C. Conjunto de tareas y procesos que colaboran entre sí (multi-hilo). Componentes: Se comunican mediante una interfaz. Implementan métodos definidos en la interfaz, para ejecución (comandos y tareas) o notificaciones (eventos). Programa principal Ejecución periódica del control (16 ms). Lectura de sensores y envío de actuación y datos de experimento. Compensación de fricción y medidas de seguridad. Comunicación con PC externo para configuración.
13 Contenido

14 Ecuaciones de Movimiento Ecuaciones de Movimiento para el Sistema definidas las variables de sistema: α θ + β ϕ cos θ γ sin θ = τ + k ϕ η ϕ + β θ cos θ β θ 2 sin θ = τ k ϕ θ: Ángulo de inclinación del péndulo. θ: Velocidad angular del péndulo. ϕ: Velocidad de giro del motor. τ: Par aplicado por el motor. con α, β, γ y η, constantes que dependen de los parámetros físicos del sistema
15 Ecuaciones de estado Variables de Estado x 1 = θ x 2 = θ x 3 = ϕ u = τ Linealización parcial: ( ) γ cos x1 αx2 2 β sin x1 u = + kx 3 + αη β2 cos 2 x 1 v α + β cos x 1 α + β cos x 1 Forzando α = η por construcción, con α = 2ml 2, η = ( 3 2 M r + m ) r 2, Ecuaciones de estado del sistema con linealización parcial ẋ 1 = x ( 2 ) γ + βx 2 ẋ 2 = 2 sin x1 v α + β cos x 1 ẋ 3 = v
16 Contenido
17 Ley No Lineal Método de Diseño Ley basada en Moldeo de Energía y Forwarding. Garantiza Estabilidad Asintótica en toda la región de trabajo. Ley de Control v = (ρ 1 + 1) ( ) γ + βx2 2 sin x1 + α + β cos x 1 2ρ 3 x 2 (α + β cos x 1 ) +ρ 2ρ1 2 donde ρ 1, ρ 2 y ρ 3 son constantes positivas de ajuste. (( ) ) x 2 + x 3 ρ 1
18 Contenido
 Mom. de inercia de las ruedas: 0,0421 kg m2 Cte.")
19 Parámetros del VAB Parámetros del vehículo: Masa del péndulo: 3,75 kg Long. al centro de masas: 14,35 cm Mom. de inercia del péndulo: 0,201 kg m2 Radio de las ruedas: 25 cm Masa de las ruedas: 1,375 kg (cada una) Mom. de inercia de las ruedas: 0,0421 kg m2 Cte. de fricción del eje: 0,00215 Parámetros de ajuste: ρ1 = 2, 4 ρ2 = 0, 0421 ρ3 = 10, 2423
20 Resultados Estabilización

21 Resultados Perturbaciones
22 Contenido
.")
23 Control LQR con cambio de referencia para x 3. Giro mediante reparto del par total aplicado. Interfaz WiiMote - Matlab R (WiiLab). Envío de referencias desde PC externo.
24 Gracias por su atención.
ENTORNO DE SIMULACIÓN Y CONTROL DE UN ROBOT VELOCISTA
 ENTORNO DE SIMULACIÓN Y CONTROL DE UN ROBOT VELOCISTA PROYECTO FIN DE CARRERA Departamento de Electrónica. Universidad de Alcalá. Ingeniería Técnica de Telecomunicación. Especialidad en Sistemas Electrónicos
ENTORNO DE SIMULACIÓN Y CONTROL DE UN ROBOT VELOCISTA PROYECTO FIN DE CARRERA Departamento de Electrónica. Universidad de Alcalá. Ingeniería Técnica de Telecomunicación. Especialidad en Sistemas Electrónicos
LISTA DE SÍMBOLOS. Capítulo 2 EJEMPLOS Y TEORIA DE LAS VIBRACIONES PARAMÉTRICAS 2.1 Introducción T - Periodo Ω - Frecuencia a- parámetro b- parámetro
 LISTA DE SÍMBOLOS Capítulo 2 EJEMPLOS Y TEORIA DE LAS VIBRACIONES PARAMÉTRICAS 2.1 Introducción T - Periodo Ω - Frecuencia a- parámetro b- parámetro 2.1.1 Rigidez Flexiva que Difiere en dos Ejes x- Desplazamiento
LISTA DE SÍMBOLOS Capítulo 2 EJEMPLOS Y TEORIA DE LAS VIBRACIONES PARAMÉTRICAS 2.1 Introducción T - Periodo Ω - Frecuencia a- parámetro b- parámetro 2.1.1 Rigidez Flexiva que Difiere en dos Ejes x- Desplazamiento
Resistencia de Materiales 1A. Profesor Herbert Yépez Castillo
 Resistencia de Materiales 1A Profesor Herbert Yépez Castillo 2015-1 2 Capítulo 5. Torsión 5.4 Ángulo 3 Un par es un momento que tiende a hacer girar respecto a su eje longitudinal. Su efecto es de interés
Resistencia de Materiales 1A Profesor Herbert Yépez Castillo 2015-1 2 Capítulo 5. Torsión 5.4 Ángulo 3 Un par es un momento que tiende a hacer girar respecto a su eje longitudinal. Su efecto es de interés
Resistencia de Materiales 1A. Profesor Herbert Yépez Castillo
 Resistencia de Materiales 1A Profesor Herbert Yépez Castillo 2014-2 2 Capítulo 5. Torsión 5.4 Ángulo 3 Un par es un momento que tiende a hacer girar respecto a su eje longitudinal. Su efecto es de interés
Resistencia de Materiales 1A Profesor Herbert Yépez Castillo 2014-2 2 Capítulo 5. Torsión 5.4 Ángulo 3 Un par es un momento que tiende a hacer girar respecto a su eje longitudinal. Su efecto es de interés
Capítulo 10. Rotación de un Cuerpo Rígido
 Capítulo 10 Rotación de un Cuerpo Rígido Contenido Velocidad angular y aceleración angular Cinemática rotacional Relaciones angulares y lineales Energía rotacional Cálculo de los momentos de inercia Teorema
Capítulo 10 Rotación de un Cuerpo Rígido Contenido Velocidad angular y aceleración angular Cinemática rotacional Relaciones angulares y lineales Energía rotacional Cálculo de los momentos de inercia Teorema
SISTEMAS ROBOTIZADOS Asignatura optativa
 Área de Ingeniería de Sistemas y Automática Departamento de Lenguajes y Computación Universidad de Almería SISTEMAS ROBOTIZADOS Asignatura optativa PRACTICA 4 CONTROL DE ROBOTS MÓVILES UTILIZANDO EL MÉTODO
Área de Ingeniería de Sistemas y Automática Departamento de Lenguajes y Computación Universidad de Almería SISTEMAS ROBOTIZADOS Asignatura optativa PRACTICA 4 CONTROL DE ROBOTS MÓVILES UTILIZANDO EL MÉTODO
Física: Momento de Inercia y Aceleración Angular
 Física: Momento de Inercia y Aceleración Angular Dictado por: Profesor Aldo Valcarce 2 do semestre 2014 Momento de Torsión (Torque) La capacidad de un fuerza de hacer girar un objeto se define como torque.
Física: Momento de Inercia y Aceleración Angular Dictado por: Profesor Aldo Valcarce 2 do semestre 2014 Momento de Torsión (Torque) La capacidad de un fuerza de hacer girar un objeto se define como torque.
TEMA 3.- CINEMÁTICA Y DINÁMICA DEL MOTOR
 TEMA.- CINEMÁTICA Y DINÁMICA DEL MOTOR 5 ..- Calcular la oblicuidad de la biela en grados, el deslizamiento, la aceleración, la velocidad instantánea y media del pistón para una posición angular de la
TEMA.- CINEMÁTICA Y DINÁMICA DEL MOTOR 5 ..- Calcular la oblicuidad de la biela en grados, el deslizamiento, la aceleración, la velocidad instantánea y media del pistón para una posición angular de la
Inercia Rotacional. Determinar la inercia de rotación de un disco y un anillo experimentalmente y compararlos con los cálculos teóricos.
 Objetivo. Inercia Rotacional Determinar la inercia de rotación de un disco y un anillo experimentalmente y compararlos con los cálculos teóricos. Introducción. La inercia rotacional (o de rotación) de
Objetivo. Inercia Rotacional Determinar la inercia de rotación de un disco y un anillo experimentalmente y compararlos con los cálculos teóricos. Introducción. La inercia rotacional (o de rotación) de
ECUACIONES DIMENSIONALES
 ECUACIONES DIMENSIONALES 1. En la expresión x = k v n / a, x = distancia, v = velocidad, a = aceleración y k es una constante adimensional. Cuánto vale n para que la expresión sea dimensionalmente homogénea?
ECUACIONES DIMENSIONALES 1. En la expresión x = k v n / a, x = distancia, v = velocidad, a = aceleración y k es una constante adimensional. Cuánto vale n para que la expresión sea dimensionalmente homogénea?
Formulario PSU Parte común y optativa de Física
 Formulario PSU Parte común y optativa de Física I) Ondas: Sonido y Luz Frecuencia ( f ) f = oscilaciones Vector/, Unidad de medida f 1/s = 1 Hz Periodo ( T ) T = oscilaciones f = 1 T T Segundo ( s ) Longitud
Formulario PSU Parte común y optativa de Física I) Ondas: Sonido y Luz Frecuencia ( f ) f = oscilaciones Vector/, Unidad de medida f 1/s = 1 Hz Periodo ( T ) T = oscilaciones f = 1 T T Segundo ( s ) Longitud
PÉNDULO FÍSICO FORZADO. Estudio de las curvas de resonancia para diferentes amortiguamientos.
 PÉNDULO FÍSICO FORZADO 1. OBJETIVO Estudio de las curvas de resonancia para diferentes amortiguamientos. 2. FUNDAMENTO TEÓRICO Se denomina péndulo físico a cualquier sólido rígido capaz de oscilar alrededor
PÉNDULO FÍSICO FORZADO 1. OBJETIVO Estudio de las curvas de resonancia para diferentes amortiguamientos. 2. FUNDAMENTO TEÓRICO Se denomina péndulo físico a cualquier sólido rígido capaz de oscilar alrededor
CARGA DE PROGRAMAS EN EL
 APÉNDICE F CARGA DE PROGRAMAS EN EL MICROCONTROLADOR El programa de control para el vehículo autobalanceado debe implementarse en el microcontrolador incorporado en el mismo. Para ello es necesario escribir
APÉNDICE F CARGA DE PROGRAMAS EN EL MICROCONTROLADOR El programa de control para el vehículo autobalanceado debe implementarse en el microcontrolador incorporado en el mismo. Para ello es necesario escribir
Módulo 1: Mecánica Sólido rígido. Rotación (II)
") Módulo 1: Mecánica Sólido rígido. Rotación (II) 1 Segunda ley de Newton en la rotación Se puede hacer girar un disco por ejemplo aplicando un par de fuerzas. Pero es necesario tener en cuenta el punto
Módulo 1: Mecánica Sólido rígido. Rotación (II) 1 Segunda ley de Newton en la rotación Se puede hacer girar un disco por ejemplo aplicando un par de fuerzas. Pero es necesario tener en cuenta el punto
Experiencia P22: Momento de Inercia Sensor de Movimiento rotatorio
 Sensor de Movimiento rotatorio Tema DataStudio ScienceWorkshop (Mac) ScienceWorkshop (Win) Movimiento rotatorio P22 Rotational Inertia.DS Equipo necesario Cant. Equipo necesario Cant. Sensor de Movimiento
Sensor de Movimiento rotatorio Tema DataStudio ScienceWorkshop (Mac) ScienceWorkshop (Win) Movimiento rotatorio P22 Rotational Inertia.DS Equipo necesario Cant. Equipo necesario Cant. Sensor de Movimiento
MOTOR CC CON REDUCTORA Y HUSILLO DE ROSCA TRAPEZOIDAL
 MOTOR CC EJERCICIOS DE CALCULO DE POTENCIA Fuerzas Necesarias Esta.ca Cuando movemos un cuerpo o masa, el motor cc.ene que aplicar una fuerza inicial que venza el equilibrio está.co del sistema, representado
MOTOR CC EJERCICIOS DE CALCULO DE POTENCIA Fuerzas Necesarias Esta.ca Cuando movemos un cuerpo o masa, el motor cc.ene que aplicar una fuerza inicial que venza el equilibrio está.co del sistema, representado
TICA EN LA ESCUELA. El Robot (hardware) Alicia Escudero. Apellido y Nombre: Escudero Alicia. Tema: características de un robot
 Alicia Escudero. Apellido y Nombre: Escudero Alicia. Tema: características de un robot") Alicia Escudero ROBÓTICA TICA EN LA ESCUELA El Robot (hardware) Apellido y Nombre: Escudero Alicia Tema: características de un robot E-mail: alyy_94@hotmail.com D.N.I: 36.491.199 02/05/1994 Introducción
Alicia Escudero ROBÓTICA TICA EN LA ESCUELA El Robot (hardware) Apellido y Nombre: Escudero Alicia Tema: características de un robot E-mail: alyy_94@hotmail.com D.N.I: 36.491.199 02/05/1994 Introducción
Diseño de un motor de rotación gráfico 3D basado en el algoritmo CORDIC
 Sistemas Digitales - 66.17 Trabajo Práctico Diseño de un motor de rotación gráfico 3D basado en el algoritmo CORDIC Primer Cuatrimestre de 2013 Sistemas Digitales - 66.17 Facultad de Ingeniería - UBA 2
Sistemas Digitales - 66.17 Trabajo Práctico Diseño de un motor de rotación gráfico 3D basado en el algoritmo CORDIC Primer Cuatrimestre de 2013 Sistemas Digitales - 66.17 Facultad de Ingeniería - UBA 2
Física: Torque y Momento de Torsión
 Física: Torque y Momento de Torsión Dictado por: Profesor Aldo Valcarce 2 do semestre 2014 Relación entre cantidades angulares y traslacionales. En un cuerpo que rota alrededor de un origen O, el punto
Física: Torque y Momento de Torsión Dictado por: Profesor Aldo Valcarce 2 do semestre 2014 Relación entre cantidades angulares y traslacionales. En un cuerpo que rota alrededor de un origen O, el punto
PR-5. PRÁCTICA REMOTA Respuesta de motores de corriente continua. Equipo modular Feedback MS-150
 PR-5. PRÁCTICA REMOTA Respuesta de motores de corriente continua. Equipo modular Feedback MS-150 Realizado: Laboratorio Remoto de Automática (LRA-ULE) Versión: Páginas: Grupo SUPPRESS (Supervisión, Control
PR-5. PRÁCTICA REMOTA Respuesta de motores de corriente continua. Equipo modular Feedback MS-150 Realizado: Laboratorio Remoto de Automática (LRA-ULE) Versión: Páginas: Grupo SUPPRESS (Supervisión, Control
Tutores: Joaquín Moreno Marchal Agustín Carmona Lorente
 Autores: Agustín Lechuga Carretero Luis Daniel Figuereo Morales Tutores: Joaquín Moreno Marchal Agustín Carmona Lorente ÍNDICE INTRODUCCIÓN... 3 DESCRIPCIÓN DEL PROYECTO... 3 FUNCIONAMIENTO... 4 DESCRIPCIÓN
Autores: Agustín Lechuga Carretero Luis Daniel Figuereo Morales Tutores: Joaquín Moreno Marchal Agustín Carmona Lorente ÍNDICE INTRODUCCIÓN... 3 DESCRIPCIÓN DEL PROYECTO... 3 FUNCIONAMIENTO... 4 DESCRIPCIÓN
Objetos en equilibrio - Ejemplo
 Objetos en equilibrio - Ejemplo Una escalera de 5 m que pesa 60 N está apoyada sobre una pared sin roce. El extremo de la escalera que apoya en el piso está a 3 m de la pared, ver figura. Cuál es el mínimo
Objetos en equilibrio - Ejemplo Una escalera de 5 m que pesa 60 N está apoyada sobre una pared sin roce. El extremo de la escalera que apoya en el piso está a 3 m de la pared, ver figura. Cuál es el mínimo
Protocolo de Experiencias de Oscilaciones y Ondas
 Aula Espacio Tocar la Ciencia J Güémez Aula de la Ciencia Universidad de Cantabria Junio 22, 2011 Protocolo de Experiencias de Oscilaciones y Ondas 1 Equilibrios: estable, inestable, indiferente Con la
Aula Espacio Tocar la Ciencia J Güémez Aula de la Ciencia Universidad de Cantabria Junio 22, 2011 Protocolo de Experiencias de Oscilaciones y Ondas 1 Equilibrios: estable, inestable, indiferente Con la
CÁTEDRA DE FÍSICA I OSCILACIONES - PROBLEMAS RESUELTOS
 CÁTEDRA DE FÍSICA I Ing. Civil, Ing. Electromecánica, Ing. Eléctrica, Ing. Mecánica OSCILACIONES - PROBLEMAS RESUELTOS PROBLEMA Nº 1 Un cuerpo oscila con movimiento armónico simple a lo largo del eje x.
CÁTEDRA DE FÍSICA I Ing. Civil, Ing. Electromecánica, Ing. Eléctrica, Ing. Mecánica OSCILACIONES - PROBLEMAS RESUELTOS PROBLEMA Nº 1 Un cuerpo oscila con movimiento armónico simple a lo largo del eje x.
El péndulo físico. Un método para determinar la aceleración de la gravedad. Oscilaciones del péndulo en un plano inclinado.
 El péndulo físico. Un método para determinar la aceleración de la gravedad. Oscilaciones del péndulo en un plano inclinado. Departamento de Física Aplicada Universidad de Cantabria 3 Diciembre 013 Resumen
El péndulo físico. Un método para determinar la aceleración de la gravedad. Oscilaciones del péndulo en un plano inclinado. Departamento de Física Aplicada Universidad de Cantabria 3 Diciembre 013 Resumen
27 de octubre de 2010
 Pontificia Universidad Católica de Chile Facultad de Física FIZ 11 Mecánica Clásica Profesor: Andrés Jordán Ayudantes: Eduardo Bañados T. eebanado@uc.cl Ariel Norambuena ainoramb@uc.cl Torque, Momento
Pontificia Universidad Católica de Chile Facultad de Física FIZ 11 Mecánica Clásica Profesor: Andrés Jordán Ayudantes: Eduardo Bañados T. eebanado@uc.cl Ariel Norambuena ainoramb@uc.cl Torque, Momento
Practica No. 5 CONTROL DE SISTEMAS NO LINEALES POR REALIMENTACION DE ESTADOS
 Practica No. 5 CONTROL DE SISTEMAS NO LINEALES POR REALIMENTACION DE ESTADOS Pontificia Universidad Javeriana Facultad de Ingeniería Departamento de Electrónica Laboratorio de Control 1. Introducción En
Practica No. 5 CONTROL DE SISTEMAS NO LINEALES POR REALIMENTACION DE ESTADOS Pontificia Universidad Javeriana Facultad de Ingeniería Departamento de Electrónica Laboratorio de Control 1. Introducción En
Dinámica en dos o tres dimensiones
 7.0.2. Dinámica en dos o tres dimensiones Ejercicio 7.27 Un cuerpo de masa 8kg, describe una trayectoria cuyas ecuaciones paramétrica son: x =2+5t 2t 2 m e y = t 2 m.determinela fuerza aplicada sobre el
7.0.2. Dinámica en dos o tres dimensiones Ejercicio 7.27 Un cuerpo de masa 8kg, describe una trayectoria cuyas ecuaciones paramétrica son: x =2+5t 2t 2 m e y = t 2 m.determinela fuerza aplicada sobre el
TEMA 5 SÓLIDO RÍGIDO CONSEJOS PREVIOS A LA RESOLUCIÓN DE LOS PROBLEMAS
 TEMA 5 SÓLIDO RÍGIDO CONSEJOS PREVIOS A LA RESOLUCIÓN DE LOS PROBLEMAS Ten presente la distinción entre velocidad angular ω Z y velocidad ordinaria v X. Si un objeto tiene una velocidad v X el objeto en
TEMA 5 SÓLIDO RÍGIDO CONSEJOS PREVIOS A LA RESOLUCIÓN DE LOS PROBLEMAS Ten presente la distinción entre velocidad angular ω Z y velocidad ordinaria v X. Si un objeto tiene una velocidad v X el objeto en
MECÁNICA II CURSO 2004/05
 1.1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
1.1.- Movimientos de un sólido rígido. (rotación alrededor de ejes fijos) 1.1.1 El conjunto representado se compone de dos varillas y una placa rectangular BCDE soldadas entre sí. El conjunto gira alrededor
2.004 MODELISMO, DINÁMICA Y CONTROL II Primavera Soluciones del boletín de problemas 6
 2.004 MODELISMO, DINÁMICA Y CONTROL II Primavera 2003 Soluciones del boletín de problemas 6 Problema 1. Varilla deslizándose por una pared. Dado que los extremos de la varilla están forzados a permanecer
2.004 MODELISMO, DINÁMICA Y CONTROL II Primavera 2003 Soluciones del boletín de problemas 6 Problema 1. Varilla deslizándose por una pared. Dado que los extremos de la varilla están forzados a permanecer
2- Sistema de comunicación utilizado (sockets TCP o UDP, aplicaciones, etc.):
:") UNIVERSIDAD DE SAN BUENAVENTURA SEDE BOGOTA INGENIERIA MECATRONICA GRUPO S.I.R.A TUTOR: MORIAN NAIR CALDERON INTEGRANTES: NICOLAS FELIPE CUBILLOS. NAYKOL ANDREY ESPITIA. CRISTIAN DANIEL GARCIA. CARLOS
UNIVERSIDAD DE SAN BUENAVENTURA SEDE BOGOTA INGENIERIA MECATRONICA GRUPO S.I.R.A TUTOR: MORIAN NAIR CALDERON INTEGRANTES: NICOLAS FELIPE CUBILLOS. NAYKOL ANDREY ESPITIA. CRISTIAN DANIEL GARCIA. CARLOS
1. Introducción: Movimiento Circular Uniforme
 FI1A2 - SISTEMAS NEWTONIANOS GUIA TEORICA Departamento de Física Unidad 5A: Oscilaciones Facultad de Ciencias Físicas y Matemáticas Profs: H. Arellano, D. Mardones, N. Mujica Universidad de Chile Semestre
FI1A2 - SISTEMAS NEWTONIANOS GUIA TEORICA Departamento de Física Unidad 5A: Oscilaciones Facultad de Ciencias Físicas y Matemáticas Profs: H. Arellano, D. Mardones, N. Mujica Universidad de Chile Semestre
Péndulo de torsión y momentos de inercia
 Prácticas de Física Péndulo de torsión y momentos de inercia 1 Objetivos Curso 2009/10 Determinar la constante de un muelle espiral Determinar el momento de inercia de varios sólidos rígidos Comprobar
Prácticas de Física Péndulo de torsión y momentos de inercia 1 Objetivos Curso 2009/10 Determinar la constante de un muelle espiral Determinar el momento de inercia de varios sólidos rígidos Comprobar
 RELACIÓN DE PROBLEMAS CAMPO ELÉCTRICO 1. Se tienen dos cargas puntuales; q1= 0,2 μc está situada a la derecha del origen de coordenadas y dista de él 3 m y q2= +0,4 μc está a la izquierda del origen y
RELACIÓN DE PROBLEMAS CAMPO ELÉCTRICO 1. Se tienen dos cargas puntuales; q1= 0,2 μc está situada a la derecha del origen de coordenadas y dista de él 3 m y q2= +0,4 μc está a la izquierda del origen y
Resistencia de los Materiales
 Resistencia de los Materiales Clase 4: Torsión y Transmisión de Potencia Dr.Ing. Luis Pérez Pozo luis.perez@usm.cl Pontificia Universidad Católica de Valparaíso Escuela de Ingeniería Industrial Primer
Resistencia de los Materiales Clase 4: Torsión y Transmisión de Potencia Dr.Ing. Luis Pérez Pozo luis.perez@usm.cl Pontificia Universidad Católica de Valparaíso Escuela de Ingeniería Industrial Primer
FORMULARIO PARA EL MAQUINADO POR DESCARGAS ELÉCTRICAS: FORMULARIO PARA EL CORTE CON SIERRAS: FORMULARIO PARA EL MAQUINADO POR TORNEADO:
 FORMULARIO PARA EL MAQUINADO POR DESCARGAS ELÉCTRICAS: V = volumen del material a remover (mm 3 ). v R = velocidad de remoción del material ( ) FORMULARIO PARA EL CORTE CON SIERRAS: S = superficie efectiva
FORMULARIO PARA EL MAQUINADO POR DESCARGAS ELÉCTRICAS: V = volumen del material a remover (mm 3 ). v R = velocidad de remoción del material ( ) FORMULARIO PARA EL CORTE CON SIERRAS: S = superficie efectiva
Serie de ejercicios de Cinemática y Dinámica TRASLACIÓN Y ROTACIÓN PURAS
 Serie de ejercicios de inemática y Dinámica TRSLIÓN Y ROTIÓN PURS 1. La camioneta que se representa en la figura viaja originalmente a 9 km/h y, frenando uniformemente, emplea 6 m en detenerse. Diga qué
Serie de ejercicios de inemática y Dinámica TRSLIÓN Y ROTIÓN PURS 1. La camioneta que se representa en la figura viaja originalmente a 9 km/h y, frenando uniformemente, emplea 6 m en detenerse. Diga qué
Examen de Física-1, 1 Ingeniería Química Examen final. Enero de 2012 Problemas (Dos puntos por problema).
.") Examen de Física-1, 1 Ingeniería Química Examen final Enero de 01 Problemas (Dos puntos por problema) Problem (Primer parcial): Un pescador desea cruzar un río de 1 km de ancho el cual tiene una corriente
Examen de Física-1, 1 Ingeniería Química Examen final Enero de 01 Problemas (Dos puntos por problema) Problem (Primer parcial): Un pescador desea cruzar un río de 1 km de ancho el cual tiene una corriente
Chapter 1. Fuerzas. Por ejemplo: Si empujas una nevera, al empujarla se ejerce una fuerza. Esta fuerza se representa así:
 Chapter 1 Fuerzas En Estática es muy usual tener un cuerpo u objeto que tiene varias fuerzas aplicadas. Es por esto que solucionar un problema de estática en pocas palabras quiere decir calcular cuánto
Chapter 1 Fuerzas En Estática es muy usual tener un cuerpo u objeto que tiene varias fuerzas aplicadas. Es por esto que solucionar un problema de estática en pocas palabras quiere decir calcular cuánto
10 cm longitud 30 m. Calcular: (a) la velocidad en el pie del plano inclinado si
 la velocidad en el pie del plano inclinado si") Las pesas de la figura ruedan sin deslizar y sin 6 cm rozamiento por un plano inclinado 30 y de 10 cm longitud 30 m. Calcular: (a) la velocidad en el pie del plano inclinado si 100 cm las pesas parten
Las pesas de la figura ruedan sin deslizar y sin 6 cm rozamiento por un plano inclinado 30 y de 10 cm longitud 30 m. Calcular: (a) la velocidad en el pie del plano inclinado si 100 cm las pesas parten
Contenidos que serán evaluados en el examen escrito, correpondiente segundo parcial en la asignatura Física III
 Contenidos que serán evaluados en el examen escrito, correpondiente segundo parcial en la asignatura Física III Movimiento rotacional Movimiento circular uniforme. Física 3er curso texto del estudiante.
Contenidos que serán evaluados en el examen escrito, correpondiente segundo parcial en la asignatura Física III Movimiento rotacional Movimiento circular uniforme. Física 3er curso texto del estudiante.
Tema 2: Representación y modelado de sistemas dinámicos
 Fundamentos de Control Automático 2º G. Ing. Tecn. Industrial Tema 2: Representación y modelado de sistemas dinámicos Índice del tema Tema 2: Representación y modelado de sistemas dinámicos 2. Señales
Fundamentos de Control Automático 2º G. Ing. Tecn. Industrial Tema 2: Representación y modelado de sistemas dinámicos Índice del tema Tema 2: Representación y modelado de sistemas dinámicos 2. Señales
Practica No. 4 CONTOL DE POSICION - CONTROL DIGITAL
 Practica No. 4 CONTOL DE POSICION - CONTROL DIGITAL Pontificia Universidad Javeriana Facultad de Ingeniería Departamento de Electrónica Laboratorio de Control. Introducción En esta práctica se realiza
Practica No. 4 CONTOL DE POSICION - CONTROL DIGITAL Pontificia Universidad Javeriana Facultad de Ingeniería Departamento de Electrónica Laboratorio de Control. Introducción En esta práctica se realiza
INDICE. Introducción 1. Movimiento vibratorio armónico simple (MVAS) 1. Velocidad en el MVAS 2. Aceleración en el MVAS 2. Dinámica del MVAS 3
 1. Velocidad en el MVAS 2. Aceleración en el MVAS 2. Dinámica del MVAS 3") INDICE Introducción 1 Movimiento vibratorio armónico simple (MVAS) 1 Velocidad en el MVAS Aceleración en el MVAS Dinámica del MVAS 3 Aplicación al péndulo simple 4 Energía cinética en el MVAS 6 Energía
INDICE Introducción 1 Movimiento vibratorio armónico simple (MVAS) 1 Velocidad en el MVAS Aceleración en el MVAS Dinámica del MVAS 3 Aplicación al péndulo simple 4 Energía cinética en el MVAS 6 Energía
P2.- El escape de áncora
 P.- El escape de áncora. Como es bien sabido desde hace tiempo, las oscilaciones de un péndulo son isócronas, por lo que son idóneas como referencia para la medida del tiempo en los relojes. Sin embargo,
P.- El escape de áncora. Como es bien sabido desde hace tiempo, las oscilaciones de un péndulo son isócronas, por lo que son idóneas como referencia para la medida del tiempo en los relojes. Sin embargo,
Práctico 2: Mecánica lagrangeana
 Mecánica Anaĺıtica Curso 2016 Práctico 2: Mecánica lagrangeana 1. La polea y la cuerda de la figura son ideales y los bloques deslizan sin roce. Obtenga las aceleraciones de los bloques a partir de las
Mecánica Anaĺıtica Curso 2016 Práctico 2: Mecánica lagrangeana 1. La polea y la cuerda de la figura son ideales y los bloques deslizan sin roce. Obtenga las aceleraciones de los bloques a partir de las
I. Objetivos. II. Introducción.
 Universidad de Sonora División de Ciencias Exactas y Naturales Departamento de Física Laboratorio de Mecánica II Práctica #: Dinámica rotacional: Cálculo del Momento de Inercia I. Objetivos. Medir el momento
Universidad de Sonora División de Ciencias Exactas y Naturales Departamento de Física Laboratorio de Mecánica II Práctica #: Dinámica rotacional: Cálculo del Momento de Inercia I. Objetivos. Medir el momento
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID PRUEBAS DE ACCESO A ESTUDIOS UNIVERSITARIOS (LOGSE) Curso
 Curso") UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID INSTRUCCIONES GENERALES Y VALORACIÓN Se presentan a continuación dos pruebas: OPCIÓN A y OPCIÓN B, cada una de ellas con un ejercicio y varias cuestiones.
UNIVERSIDADES PÚBLICAS DE LA COMUNIDAD DE MADRID INSTRUCCIONES GENERALES Y VALORACIÓN Se presentan a continuación dos pruebas: OPCIÓN A y OPCIÓN B, cada una de ellas con un ejercicio y varias cuestiones.
PRÁCTICA DE LABORATORIO II-05 PÉNDULO DE TORSIÓN
 PRÁCTICA DE LABORATORIO II-05 PÉNDULO DE TORSIÓN OBJETIVOS Determinar la constante de torsión de un péndulo. Estudiar la dependencia del período de oscilación con el momento de inercia. Determinar experimentalmente
PRÁCTICA DE LABORATORIO II-05 PÉNDULO DE TORSIÓN OBJETIVOS Determinar la constante de torsión de un péndulo. Estudiar la dependencia del período de oscilación con el momento de inercia. Determinar experimentalmente
1. Análisis Cuantitativo. Unidades Físicas (SI) Tiempo: Masa: Constantes Fundamentales. Longitud
 Tiempo: Masa: Constantes Fundamentales. Longitud") 1. Análisis Cuantitativo Unidades Físicas (SI) Unidades, estimaciones numéricas, análisis dimensional Matemáticas básicas: Funciones, trigonometría Aproximaciones Funciones de una variable y derivadas
1. Análisis Cuantitativo Unidades Físicas (SI) Unidades, estimaciones numéricas, análisis dimensional Matemáticas básicas: Funciones, trigonometría Aproximaciones Funciones de una variable y derivadas
Dpto. Ingeniería de Sistemas y Automática, Universidad de Sevilla, España Laboratoire d Automatique de Grenoble (CNRS-LAG), Francia
, Francia") DESARROLLO Y EXPERIMENTACIÓN DE UN VEHÍCULO BASADO EN PÉNDULO INVERTIDO (PPCAR) A. Viguria A. Prieto M. Fiacchini R. Cano F. R. Rubio J. Aracil C. Canudas-de-Wit Dpto. Ingeniería de Sistemas y Automática,
DESARROLLO Y EXPERIMENTACIÓN DE UN VEHÍCULO BASADO EN PÉNDULO INVERTIDO (PPCAR) A. Viguria A. Prieto M. Fiacchini R. Cano F. R. Rubio J. Aracil C. Canudas-de-Wit Dpto. Ingeniería de Sistemas y Automática,
Interfaces específicas
 Interfaces específicas Permiten la conexión a elementos o procesos particulares de la planta Señales no estándar (5 a 10% aplicaciones) Disponibles para autómatas de gama media y alta Clasificación: o
Interfaces específicas Permiten la conexión a elementos o procesos particulares de la planta Señales no estándar (5 a 10% aplicaciones) Disponibles para autómatas de gama media y alta Clasificación: o
Movimiento Relativo. Velocidad relativa constante
 Movimiento Relativo Consideremos un sistema inercial S. El vector posición de una partícula respecto a S es. Queremos describir el movimiento de la partícula relativo a un sistema S que se mueve respecto
Movimiento Relativo Consideremos un sistema inercial S. El vector posición de una partícula respecto a S es. Queremos describir el movimiento de la partícula relativo a un sistema S que se mueve respecto
2DA PRÁCTICA CALIFICADA
 2DA PRÁCTICA CALIFICADA DINÁMICA (IC 244) ALUMNOS : CARITAS BARRIENTOS, Ronald ROBLES ROCHA, Hamilton TORRES PÉREZ, Walter A. TORO VELARDE, William DOCENTE : Ing. CASTRO PÉREZ, Cristian CINÉTICA DE UNA
2DA PRÁCTICA CALIFICADA DINÁMICA (IC 244) ALUMNOS : CARITAS BARRIENTOS, Ronald ROBLES ROCHA, Hamilton TORRES PÉREZ, Walter A. TORO VELARDE, William DOCENTE : Ing. CASTRO PÉREZ, Cristian CINÉTICA DE UNA
Instituto de Física Facultad de Ingeniería Universidad de la República
 SEUNDO PARCIAL - Física 1 1 de Julio de 014 g= 9,8 m/s Momento de Inercia de un disco de masa M y radio R respecto de un eje MR perpendicular que pasa por su centro de masa: I = Momento de Inercia de una
SEUNDO PARCIAL - Física 1 1 de Julio de 014 g= 9,8 m/s Momento de Inercia de un disco de masa M y radio R respecto de un eje MR perpendicular que pasa por su centro de masa: I = Momento de Inercia de una
EL GIRÓSCOPO. Determinación experimental del momento de inercia del giróscopo y de la velocidad angular de precesión.
 EL GIRÓSCOPO 1. OBJETIVOS Determinación experimental del momento de inercia del giróscopo y de la velocidad angular de precesión. 2. FUNDAMENTO TEÓRICO. Un giróscopo es un disco en rotación construido
EL GIRÓSCOPO 1. OBJETIVOS Determinación experimental del momento de inercia del giróscopo y de la velocidad angular de precesión. 2. FUNDAMENTO TEÓRICO. Un giróscopo es un disco en rotación construido
Solución de Examen Final Física I
 Solución de Examen Final Física I Temario A Departamento de Física Escuela de Ciencias Facultad de Ingeniería Universidad de San Carlos de Guatemala 28 de mayo de 2013 Un disco estacionario se encuentra
Solución de Examen Final Física I Temario A Departamento de Física Escuela de Ciencias Facultad de Ingeniería Universidad de San Carlos de Guatemala 28 de mayo de 2013 Un disco estacionario se encuentra
Control Lineal: Descripciones matemáticas de sistemas y simulacion en MATLAB/Simumlink
 : Descripciones matemáticas de sistemas y simulacion en MATLAB/Simumlink Dr. J. Fermi Guerrero Benemérita Universidad Autónoma de Puebla Facultad de Ciencias de la Electrónica Lic. Ciencias de la Electrónica
: Descripciones matemáticas de sistemas y simulacion en MATLAB/Simumlink Dr. J. Fermi Guerrero Benemérita Universidad Autónoma de Puebla Facultad de Ciencias de la Electrónica Lic. Ciencias de la Electrónica
FICHA TECNICA DE ESPECIFICACIONES
 NOMBRE DEL ELEMENTO: ESTACION TOTAL DE TOPOGRAFIA Alcance de medición sin prisma 550 mts. Alcance de Medición con un prisma de 6,500 mts Una pantalla táctil a Color con teclado alfanumérico. Procesador
NOMBRE DEL ELEMENTO: ESTACION TOTAL DE TOPOGRAFIA Alcance de medición sin prisma 550 mts. Alcance de Medición con un prisma de 6,500 mts Una pantalla táctil a Color con teclado alfanumérico. Procesador
UNIVERSIDAD POLITÉCNICA DE EL SALVADOR ESCUELA DE FORMACIÓN BÁSICA. FÍSICA II PRÁCTICA 26 PENDULO SIMPLE
 UNIVERSIDAD POLITÉCNICA DE EL SALVADOR ESCUELA DE FORMACIÓN BÁSICA. FÍSICA II PRÁCTICA 26 PENDULO SIMPLE OBJETIVOS DEL APRENDIZAJE: ESTUDIAR LAS OSCILACIONES DEL PÉNDULO Y DETERMINAR LAS SIMPLIFICACIONES
UNIVERSIDAD POLITÉCNICA DE EL SALVADOR ESCUELA DE FORMACIÓN BÁSICA. FÍSICA II PRÁCTICA 26 PENDULO SIMPLE OBJETIVOS DEL APRENDIZAJE: ESTUDIAR LAS OSCILACIONES DEL PÉNDULO Y DETERMINAR LAS SIMPLIFICACIONES
Física General 1 Proyecto PMME - Curso 2007 Instituto de Física Facultad de Ingeniería UdelaR
 Física General 1 Proecto PMME - Curso 007 Instituto de Física Facultad de Ingeniería UdelaR TITULO DINAMICA DEL CARRETEL AUTORES Santiago Duarte, Nicolás Puppo Juan Manuel Del Barrio INTRODUCCIÓN En este
Física General 1 Proecto PMME - Curso 007 Instituto de Física Facultad de Ingeniería UdelaR TITULO DINAMICA DEL CARRETEL AUTORES Santiago Duarte, Nicolás Puppo Juan Manuel Del Barrio INTRODUCCIÓN En este
Física. Choque de un meteorito sobre la tierra
 Física Choque de un meteorito sobre la tierra Hace 65 millones de años la Tierra cambió de forma repentina, muchas especies desaparecieron, plantas, animales terrestres y marinos y sobre todo, los grandes
Física Choque de un meteorito sobre la tierra Hace 65 millones de años la Tierra cambió de forma repentina, muchas especies desaparecieron, plantas, animales terrestres y marinos y sobre todo, los grandes
Sistemas autónomos. Introducción a la teoría cualitativa.
 Lección 4 Sistemas autónomos. Introducción a la teoría cualitativa. 4.1 Sistemas autónomos. Mapas de fase. En esta lección nos centraremos en el estudio de sistemas autónomos, es decir, aquellos que pueden
Lección 4 Sistemas autónomos. Introducción a la teoría cualitativa. 4.1 Sistemas autónomos. Mapas de fase. En esta lección nos centraremos en el estudio de sistemas autónomos, es decir, aquellos que pueden
Robótica en la Universidad
 Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Guia N 6 - Primer cuatrimestre de 2007 Sólidos rígidos planos. Energía potencial y mecánica.
 æ Mecánica CLásica Guia N 6 - Primer cuatrimestre de 2007 Sólidos rígidos planos. Energía potencial y mecánica. Problema 1: Dos barras delgadas uniformes de longitudes iguales, l=0.5 m, una de 4 kg y la
æ Mecánica CLásica Guia N 6 - Primer cuatrimestre de 2007 Sólidos rígidos planos. Energía potencial y mecánica. Problema 1: Dos barras delgadas uniformes de longitudes iguales, l=0.5 m, una de 4 kg y la
Posición angular, θ (rad) Velocidad angular instantánea, Velocidad instantánea, v = (m/s) dθ ω = (rad/s) Torque, τ = Iα (N-m)
 Velocidad angular instantánea, Velocidad instantánea, v = (m/s) dθ ω = (rad/s) Torque, τ = Iα (N-m)") Experimento 7 Movimiento de rotación Objetivos 1. Establecer algunas similitudes entre el movimiento de traslación y el de rotación,. Medir la posición, velocidad y aceleración angulares de objetos girando,
Experimento 7 Movimiento de rotación Objetivos 1. Establecer algunas similitudes entre el movimiento de traslación y el de rotación,. Medir la posición, velocidad y aceleración angulares de objetos girando,
TALLER DE OSCILACIONES Y ONDAS
 TALLER DE OSCILACIONES Y ONDAS Departamento De Fı sica y Geologı a, Universidad De Pamplona DOCENTE: Fı sico Amando Delgado. TEMAS: Todos los desarrollados el primer corte. 1. Determinar la frecuencia
TALLER DE OSCILACIONES Y ONDAS Departamento De Fı sica y Geologı a, Universidad De Pamplona DOCENTE: Fı sico Amando Delgado. TEMAS: Todos los desarrollados el primer corte. 1. Determinar la frecuencia
ITM, Institución universitaria. Guía de Laboratorio de Física Mecánica. Práctica 13: Aceleración angular y momento de inercia. Fotosensores.
 IM, Institución universitaria Guía de Laboratorio de Física Mecánica Práctica 13: Aceleración angular y momento de inercia Implementos Sistema rotante (base), hilo, cinta, cilindro con regla de aluminio,
IM, Institución universitaria Guía de Laboratorio de Física Mecánica Práctica 13: Aceleración angular y momento de inercia Implementos Sistema rotante (base), hilo, cinta, cilindro con regla de aluminio,
Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre...
 Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre... La figura muestra un manipulador paralelo horizontal plano, que consta de una plataforma en forma de triángulo equilátero de lado l, cuya masa m se halla
Examen de TEORIA DE MAQUINAS Diciembre 03 Nombre... La figura muestra un manipulador paralelo horizontal plano, que consta de una plataforma en forma de triángulo equilátero de lado l, cuya masa m se halla
Física III (sección 3) ( ) Ondas, Óptica y Física Moderna
 ( ) Ondas, Óptica y Física Moderna") Física III (sección 3) (230006-230010) Ondas, Óptica y Física Moderna Profesor: M. Antonella Cid M. Departamento de Física, Facultad de Ciencias Universidad del Bío-Bío Carreras: Ingeniería Civil, Ingeniería
Física III (sección 3) (230006-230010) Ondas, Óptica y Física Moderna Profesor: M. Antonella Cid M. Departamento de Física, Facultad de Ciencias Universidad del Bío-Bío Carreras: Ingeniería Civil, Ingeniería
Academia Local de Física. Ing. Rafael A. Sánchez Rodríguez
 1 2 3 4 5 6 7 8 9 10 Preguntas de repaso 1) 10.1. Explique por medio de diagramas por qué se dirige hacia el centro la aceleración de un cuerpo que se mueve en círculos a rapidez constante. 2) 10.2. Un
1 2 3 4 5 6 7 8 9 10 Preguntas de repaso 1) 10.1. Explique por medio de diagramas por qué se dirige hacia el centro la aceleración de un cuerpo que se mueve en círculos a rapidez constante. 2) 10.2. Un
Table of Contents. 1 Ingeniería Eléctrica, Smart Grid y Micro Grid. 2 "Smart Grid" - Redes inteligentes de corriente. 2 Complemento de ESG 1
 Table of Contents Table of Contents 1 Ingeniería Eléctrica, Smart Grid y Micro Grid 2 "Smart Grid" - Redes inteligentes de corriente 2 Complemento de ESG 1 4 EUG Control automático de generadores y sincronización
Table of Contents Table of Contents 1 Ingeniería Eléctrica, Smart Grid y Micro Grid 2 "Smart Grid" - Redes inteligentes de corriente 2 Complemento de ESG 1 4 EUG Control automático de generadores y sincronización
I. Objetivos. II. Introducción.
 Universidad de Sonora División de Ciencias Exactas y Naturales Departamento de Física Laboratorio de Mecánica II Práctica #4: El rodamiento y el Teorema de trabajo-energía I. Objetivos. Determinar el trabajo
Universidad de Sonora División de Ciencias Exactas y Naturales Departamento de Física Laboratorio de Mecánica II Práctica #4: El rodamiento y el Teorema de trabajo-energía I. Objetivos. Determinar el trabajo
Fuerzas de un Campo Magnético sobre Cargas Eléctricas en Movimiento
 Fuerzas de un Campo Magnético sobre Cargas Eléctricas en Movimiento Ejercicio resuelto nº 1 Un electrón penetra perpendicularmente desde la izquierda en un campo magnético uniforme vertical hacia el techo
Fuerzas de un Campo Magnético sobre Cargas Eléctricas en Movimiento Ejercicio resuelto nº 1 Un electrón penetra perpendicularmente desde la izquierda en un campo magnético uniforme vertical hacia el techo
Momento angular de una partícula. Momento angular de un sólido rígido
 Momento angular de una partícula Se define momento angular de una partícula respecto de del punto O, como el producto vectorial del vector posición r por el vector momento lineal mv L=r mv Momento angular
Momento angular de una partícula Se define momento angular de una partícula respecto de del punto O, como el producto vectorial del vector posición r por el vector momento lineal mv L=r mv Momento angular
DEPARTAMENTO DE ELECTROMECANICA INGENIERIA ELECTROMECANICA 1 TRABAJO PRACTICO Nº 2 SISTEMA DE FUERZAS EQUIVALENTES
 DEPRTMENTO DE ELECTROMECNIC INGENIERI ELECTROMECNIC 1 EJERCICIO Nº1 TRJO PRCTICO Nº 2 SISTEM DE FUERZS EQUIVLENTES Si el peso ubicado en el punto tiene un valor de 20 KN, determine el valor de la carga
DEPRTMENTO DE ELECTROMECNIC INGENIERI ELECTROMECNIC 1 EJERCICIO Nº1 TRJO PRCTICO Nº 2 SISTEM DE FUERZS EQUIVLENTES Si el peso ubicado en el punto tiene un valor de 20 KN, determine el valor de la carga
Laboratorio de Física Universitaria 1. Péndulo Físico. Pimavera 2006 Domitila González PENDULO FÍSICO
 Laboratorio de Física Universitaria 1. Péndulo Físico. Pimavera 006 PENDULO FÍSICO Autor: M. en C. Patiño Fecha: Primaverao 006 OBJETIVOS Encontrar la relación que existe entre la longitud L, y El periodo
Laboratorio de Física Universitaria 1. Péndulo Físico. Pimavera 006 PENDULO FÍSICO Autor: M. en C. Patiño Fecha: Primaverao 006 OBJETIVOS Encontrar la relación que existe entre la longitud L, y El periodo
Ambiente gráfico de simulación de un péndulo.
 Ambiente gráfico de simulación de un péndulo. J. A. Mijares, F. Reyes, S. Vergara, D. Rojas, J. Salome Av. San Claudio y 18 Sur, C.U. San Manuel, Edificio 109-A, 7570, Puebla, Pue. Grupo de robótica, FCE-BUAP
Ambiente gráfico de simulación de un péndulo. J. A. Mijares, F. Reyes, S. Vergara, D. Rojas, J. Salome Av. San Claudio y 18 Sur, C.U. San Manuel, Edificio 109-A, 7570, Puebla, Pue. Grupo de robótica, FCE-BUAP
PRÁCTICA 6: PÉNDULO FÍSICO Y MOMENTOS DE INERCIA
 Departamento de Física Aplicada Universidad de Castilla-La Mancha Escuela Técnica Superior Ing. Agrónomos PRÁCTICA 6: PÉNDULO FÍSICO Y MOMENTOS DE INERCIA Materiales * Varilla delgada con orificios practicados
Departamento de Física Aplicada Universidad de Castilla-La Mancha Escuela Técnica Superior Ing. Agrónomos PRÁCTICA 6: PÉNDULO FÍSICO Y MOMENTOS DE INERCIA Materiales * Varilla delgada con orificios practicados
Examen de TECNOLOGIA DE MAQUINAS Septiembre 99 Nombre...
 Examen de TECNOLOGIA DE MAQUINAS Septiembre 99 Nombre... La figura muestra el tramo de una montaña rusa en el que se encuentra la mayor caída del recorrido, de 20 m de altura. El vagón inicia el descenso
Examen de TECNOLOGIA DE MAQUINAS Septiembre 99 Nombre... La figura muestra el tramo de una montaña rusa en el que se encuentra la mayor caída del recorrido, de 20 m de altura. El vagón inicia el descenso
Análisis del sistema péndulo-carro-balancín
 Capítulo 3 Análisis del sistema péndulo-carro-balancín El sistema consta de un péndulo invertido colocado sobre un balancín, el cual se puede dividir en dos partes. La primera consta del balancín, en donde,
Capítulo 3 Análisis del sistema péndulo-carro-balancín El sistema consta de un péndulo invertido colocado sobre un balancín, el cual se puede dividir en dos partes. La primera consta del balancín, en donde,
Guía de Ejercicios Electroestática, ley de Coulomb y Campo Eléctrico
 NOMBRE: LEY DE COULOMB k= 9 x 10 9 N/mc² m e = 9,31 x 10-31 Kg q e = 1,6 x 10-19 C g= 10 m/s² F = 1 q 1 q 2 r 4 π ε o r 2 E= F q o 1. Dos cargas puntuales Q 1 = 4 x 10-6 [C] y Q 2 = -8 x10-6 [C], están
NOMBRE: LEY DE COULOMB k= 9 x 10 9 N/mc² m e = 9,31 x 10-31 Kg q e = 1,6 x 10-19 C g= 10 m/s² F = 1 q 1 q 2 r 4 π ε o r 2 E= F q o 1. Dos cargas puntuales Q 1 = 4 x 10-6 [C] y Q 2 = -8 x10-6 [C], están
INSTRUMENTACIÓN VIRTUAL APLICADA AL ESTUDIO DE SISTEMAS COMPLEJOS
 INSTRUMENTACIÓN VIRTUAL APLICADA AL ESTUDIO DE SISTEMAS COMPLEJOS Etapas de la Investigación Referencias INDICE CAPITULO 1: INTRODUCCIÓN A LA INSTRUMENTACIÓN VIRTUAL 1.1 Arquitectura de Computadoras 1.1.2
INSTRUMENTACIÓN VIRTUAL APLICADA AL ESTUDIO DE SISTEMAS COMPLEJOS Etapas de la Investigación Referencias INDICE CAPITULO 1: INTRODUCCIÓN A LA INSTRUMENTACIÓN VIRTUAL 1.1 Arquitectura de Computadoras 1.1.2
Hoja de Datos NoMADA Advance [DAT001A NoMADA Advance 02/16]
![Hoja de Datos NoMADA Advance [DAT001A NoMADA Advance 02/16]](/thumbs/49/25558123.jpg "Hoja de Datos NoMADA Advance [DAT001A NoMADA Advance 02/16]") Hoja de datos Advance Hoja de Datos Advance [DAT001A Advance 02/16] Especificaciones Técnicas de la Tarjeta NoMADA Advance Diseñado por: Diseño Embebido un Paso Adelante. DAT 001A Advance - 02/2016 Hoja
Hoja de datos Advance Hoja de Datos Advance [DAT001A Advance 02/16] Especificaciones Técnicas de la Tarjeta NoMADA Advance Diseñado por: Diseño Embebido un Paso Adelante. DAT 001A Advance - 02/2016 Hoja
 Universidad Rey Juan Carlos. Prueba de acceso para mayores de 25 años. Física obligatoria. Año 2010. Opción A. Ejercicio 1. a) Defina el vector velocidad y el vector aceleración de un movimiento y escribe
Universidad Rey Juan Carlos. Prueba de acceso para mayores de 25 años. Física obligatoria. Año 2010. Opción A. Ejercicio 1. a) Defina el vector velocidad y el vector aceleración de un movimiento y escribe
ROBOTICA por OLLERO BATURONE Editorial Marcombo. Foreword Prólogo Prefacio del autor
 ROBOTICA por OLLERO BATURONE Editorial Marcombo Foreword Prólogo Prefacio del autor CAPÍTULO 1. Introducción 1.1. Robótica 1.2. Esquema general del sistema robot 1.3. Robots manipuladores 1.3.1. Sistema
ROBOTICA por OLLERO BATURONE Editorial Marcombo Foreword Prólogo Prefacio del autor CAPÍTULO 1. Introducción 1.1. Robótica 1.2. Esquema general del sistema robot 1.3. Robots manipuladores 1.3.1. Sistema
Práctica Módulo de torsión
 Práctica Módulo de torsión Objetivo eterminar el módulo de torsión de varillas de distintos materiales por los métodos estático y dinámico. Material Aparato de torsión representado en la figura, varillas
Práctica Módulo de torsión Objetivo eterminar el módulo de torsión de varillas de distintos materiales por los métodos estático y dinámico. Material Aparato de torsión representado en la figura, varillas
1. El eje de un motor gira a 500rpm. a que velocidad angular equivale en rad/s?
 1. El eje de un motor gira a 500rpm. a que velocidad angular equivale en rad/s? 2. Determina la relación de transmisión entre dos árboles y la velocidad del segundo si están unidos mediante una transmisión
1. El eje de un motor gira a 500rpm. a que velocidad angular equivale en rad/s? 2. Determina la relación de transmisión entre dos árboles y la velocidad del segundo si están unidos mediante una transmisión
Introducción a los Sistemas de Control
 Introducción a los Sistemas de Control Organización de la presentación - Introducción a la teoría de control y su utilidad - Ejemplo simple: modelado de un motor de continua que mueve una cinta transportadora.
Introducción a los Sistemas de Control Organización de la presentación - Introducción a la teoría de control y su utilidad - Ejemplo simple: modelado de un motor de continua que mueve una cinta transportadora.
Física e Química 1º Bach.
 Física e Química 1º Bach. Dinámica 15/04/11 DEPARTAMENTO DE FÍSICA E QUÍMICA Nombre: Resuelve dos de los siguientes Problemas 1. Un cuerpo de 2,0 kg de masa reposa sobre un plano inclinado 30º unido por
Física e Química 1º Bach. Dinámica 15/04/11 DEPARTAMENTO DE FÍSICA E QUÍMICA Nombre: Resuelve dos de los siguientes Problemas 1. Un cuerpo de 2,0 kg de masa reposa sobre un plano inclinado 30º unido por
EXAMEN FÍSICA 2º BACHILLERATO TEMA 2: CAMPO ELECTROMAGNÉTICO
 INSTRUCCIONES GENERALES Y VALORACIÓN La prueba consiste de dos opciones, A y B, y el alumno deberá optar por una de las opciones y resolver las tres cuestiones y los dos problemas planteados en ella, sin
INSTRUCCIONES GENERALES Y VALORACIÓN La prueba consiste de dos opciones, A y B, y el alumno deberá optar por una de las opciones y resolver las tres cuestiones y los dos problemas planteados en ella, sin
PROBLEMAS. Problema 1
 PROBLEMAS Problema 1 Se considera un avión en vuelo de crucero a altitud h y velocidad V constantes. La altitud de vuelo está fijada. Sabiendo que la resistencia aerodinámica viene dada por D = k 1 V 2
PROBLEMAS Problema 1 Se considera un avión en vuelo de crucero a altitud h y velocidad V constantes. La altitud de vuelo está fijada. Sabiendo que la resistencia aerodinámica viene dada por D = k 1 V 2
POSTGRADO EN INGENIERIA MECATRÓNICA CONTROL DE ROBOTS TAREA No. 4 Modelado de la fricción F. HUGO RAMIREZ LEYVA
 POSTGRADO EN INGENIERIA MECATRÓNICA CONTROL DE ROBOTS 21200006 TAREA No. 4 Modelado de la fricción F. HUGO RAMIREZ LEYVA ferminhugo.ramirez@upaep.mx PUEBLA PUE. A 29 DE JUNIO DE 2006. 1. Introducción Los
POSTGRADO EN INGENIERIA MECATRÓNICA CONTROL DE ROBOTS 21200006 TAREA No. 4 Modelado de la fricción F. HUGO RAMIREZ LEYVA ferminhugo.ramirez@upaep.mx PUEBLA PUE. A 29 DE JUNIO DE 2006. 1. Introducción Los
7. PÉNDULO DE TORSIÓN
 7. PÉNDULO DE TORSÓN OBJETVO El objetivo de la práctica es comprobar la dependencia del momento de inercia de un objeto respecto a la distancia al centro de rotación y realizar la medición del momento
7. PÉNDULO DE TORSÓN OBJETVO El objetivo de la práctica es comprobar la dependencia del momento de inercia de un objeto respecto a la distancia al centro de rotación y realizar la medición del momento
Tema 2. Dinámica básica de la partícula aislada y de los sistemas de partículas
 Mecánica teórica Tema 2. Dinámica básica de la partícula aislada y de los sistemas de partículas Tema 2B Universidad de Sevilla - Facultad de Física cotrino@us.es 22 de septiembre de 2016 Tema 2B (Grupo
Mecánica teórica Tema 2. Dinámica básica de la partícula aislada y de los sistemas de partículas Tema 2B Universidad de Sevilla - Facultad de Física cotrino@us.es 22 de septiembre de 2016 Tema 2B (Grupo
y bola riel Mg UNIVERSIDAD NACIONAL DE QUILMES 4 de noviembre de 2002 Página 1 de 5
 INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Control Automático II Má Problema UNIVERSIDAD NACIONAL DE QUILMES 4 de noviembre de 2002 Página de 5. Control de un itema de Bola Riel La Figura muetra
INGENIERÍA EN AUTOMATIZACIÓN Y CONTROL INDUSTRIAL Control Automático II Má Problema UNIVERSIDAD NACIONAL DE QUILMES 4 de noviembre de 2002 Página de 5. Control de un itema de Bola Riel La Figura muetra
RECURSO SOLAR. Primera Clase. Ing. Diego Oroño Ing. Gonzalo Hermida Ing. Marcelo Aguiar
 RECURSO SOLAR Primera Clase Ing. Diego Oroño Ing. Gonzalo Hermida Ing. Marcelo Aguiar Objetivos Posicionamiento del Sol Ubicación de sombras en el diagrama solar Distancia entre paneles Inclinación óptima
RECURSO SOLAR Primera Clase Ing. Diego Oroño Ing. Gonzalo Hermida Ing. Marcelo Aguiar Objetivos Posicionamiento del Sol Ubicación de sombras en el diagrama solar Distancia entre paneles Inclinación óptima
Trabajo Práctico 4 - Movimiento relativo del punto
 Facultad de Ingeniería - U.N.L.P. Mecánica Racional - Curso 2016 / 2 semestre Trabajo Práctico 4 - Movimiento relativo del punto Problema 1. Un excéntrico circular de radio R gira con velocidad angular
Facultad de Ingeniería - U.N.L.P. Mecánica Racional - Curso 2016 / 2 semestre Trabajo Práctico 4 - Movimiento relativo del punto Problema 1. Un excéntrico circular de radio R gira con velocidad angular