SUMO _ CACAHUETE. Departamento de Electricidad-Electrónica. Ciclo Superior de Desarrollo de Productos Electrónicos. Alumno: Ignacio Díaz Díaz-Regañón.
|
|
|
- Francisco Aguilar Maidana
- hace 6 años
- Vistas:
Transcripción

1 SUMO _ CACAHUETE Departamento de Electricidad-Electrónica Ciclo Superior de Desarrollo de Productos Electrónicos Alumno: Ignacio Díaz Díaz-Regañón. Profesores: Pedro Alonso Sanz Alfonso García Gallego Juan Dongil García Instituto: I.E.S. Joan Miró Localidad: San Sebastián de los Reyes Curso: 2007/2008 1
2 INDICE 1.- Introducción Diagrama en bloques del robot 4 3. Esquema eléctrico del robot Análisis de los bloques Placa de adaptador de señales PC-UC Alimentación Placa de potencia Placa de control Programas Programas de prueba Prueba de motores Prueba del servo de acción Prueba sensores CNY Programa sensores GP2D Driver Gp2d12_v_d para calcular la distancia Programa de prueba de los dos sensores GP2D Programa principal básico Fabricación de circuitos impresos Explicación de la fabricación Fabricación de la placa de alimentación-comunicación PC-UC Fabricación de la placa de potencia Fabricación de la placa de control Fabricación de la carrocería Listado de precios Placa de fuente de alimentación-comunicación PC-UC Placa de potencia Placa de control Anexos 43 2
3 1.- Introducción Este proyecto consiste en fabricar un robot capaz de luchar con otro de forma autónoma en un tatami circular. El robot no podrá superar unas dimensiones que serán 10cm x 10cm x 10cm y tampoco un peso 500gr. Para el combate contará con diversos sensores tanto para encontrar al oponente, GP2D12 sensores que calculan la distancia por medio de infrarrojos, como para evitar que sea expulsado del círculo, sensores CNY70 que a través de un diodo emisor de luz y un fototransistor detectan la diferencia del blanco y el negro. Estos sensores se comentarán mas adelante. El robot tendrá dos motores independientes para controlar el sentido de giro y un tercer apoyo trasero para mantener la horizontalidad. El giro se podrá conseguir de dos formas parando un motor y girando otro o bien girando un motor en un sentido y el otro en el contrario, este segundo método hará que el giro sea más rápido y en el sitio. Estos movimientos se usarán para el desplazamiento normal del robot y como maniobra de escape ante algún ataque. El robot cuenta con tres placas de circuito impreso. En la parte superior se encuentra la placa de control en ella esta el microprocesador, el cerebro del robot, el que contiene el programa y el que gestiona los demás componentes como sea necesario para llevar a cabo el programa que se le ha cargado. En esta placa también se encuentran los conectores donde se conectan los sensores, es así porque deben situarse lo mas cerca posible del PIC para evitar que se introduzcan ruidos en la señal. La placa intermedia es la de potencia, esta tiene los componentes necesarios para poder utilizar los motores de una manera eficaz, protege a las demás placas de posibles corrientes inversas y se encarga de llevar a los motores la información para que giren en el sentido que se requiera. La ultima placa, es la fuente de alimentación y comunicación con el PC. La fuente de alimentación se encarga de sacar las tensiones necesarias para alimentar los demás placas y generar la que denominaremos tensión de potencia que es la que alimenta a los motores. La función de la parte de comunicación con el PC es la de poder cargar el programa que previamente se ha desarrollado en el ordenador, mediante una comunicación utilizando la interfaz RS232. 3
4 Todas las placas de las que consta el robot y cada componente que se incluye en ellas serán explicados mas adelante en distintos puntos del proyecto dedicados exclusivamente a ellas. 2.- Diagrama en bloques. Este diagrama muestra en conjunto el nombre de cada bloque del robot y como se comunican los bloques entre si. Este esquema ayuda a comprender desde una vista superficial la base del funcionamiento del robot. 4

5 DIAGRAMA EN BLOQUES. 5

6 ESQUEMA ELECTRICO. 6

7 4.- Análisis de los bloques Placa de adaptador de señales PC-UC Alimentación. En esta placa se encuentran dos partes del robot, una es la de alimentación y otra es la de comunicación con el PC. La parte de alimentación se encarga de estabilizar la tensión de la batería y de generar una tensión de 5 voltios a través de un regulador LM350K para la alimentación de los componentes digitales. El primer componente que se encuentra en la parte de alimentación después del interruptor, es el diodo D1, este encarga de impedirle paso de la corriente en caso de que se invierta la polaridad de la batería. Después del diodo se lleva la alimentación directamente los motores ya que su tensión nominal son 9 voltios. Tanto el C3 como el C1 son condensadores que rectifican la señal para hacerla mas lineal, y evitar que la tensión de alimentación tenga altibajos en su valor. Los condensadores C2 y C4 se encargan de filtrar posibles ruidos que se transmiten por el aire, que provengan de antenas emisoras, o de equipos que emitan ruido. El regulador de tensión LM350K tiene un rango de trabajo de entre 3 a 35v y con el package que esta montado, TO-3, es capaz de dar hasta 3 amperios. La tensión la regula por un potenciómetro que se encuentra en su patilla de referencia. Esta resistencia ajustable, RV1, al regular esta tensión de referencia hace que el regulador deje salir más o menos tensión a la salida. La resistencia R38 se encarga de estabilizar la corriente a la resistencia de ajuste, y el condensador C15 de evitar que al regular la tensión de referencia se generen picos de tensión que puedan enviar lecturas erróneas al LM350K. Los diodos D2 y D4 están para proteger al regulador de tensión de posibles tensiones inversas. En la parte de la comunicación con el PC el componente principal y casi único es el integrado MAX232, que se encarga de la conversión de niveles de voltaje de RS232 a TTL. Para ello necesita unos condensadores a su salida, en el siguiente esquema C1 y C3, que hacen que pueda cambiar la tensión de 5v que es un 1 lógico en TTL a -10v que es el equivalente a otro 1 lógico en RS232. 7
8 Terminales y esquema interno del RS232 8

9 El conector J1A es el que comunica con la placa de control llevándole las tensiones que son necesarias para alimentar los componentes. El JP1 lleva directamente la tensión de 9v a la placa de potencia Placa de potencia. Esta placa se encarga del control de los motores y de aislar el resto del robot, de voltajes de potencia, posibles ruidos y corrientes generadas por lo motores. El integrado L293B es un inversor de giro que puede dar hasta 2 amperios, para alimentar los motores. Funciona de manera que al tener un 1 en una entrada IN entrada y un 0 en la otra entrada IN donde estén conectados los motores respectivamente, el motor girara en un sentido y si se invierten los valores lógicos, el motor cambiará el sentido de giro. Este ejemplo lo explica:
10 En caso de que las entradas estén al mismo nivel lógico, los motores se detendrán Los integrados U4, U5, U6 y U7 son optoacopladores, estos componentes se encargan de aislar circuitos a través de luz, tienen un fotodiodo en su interior que cuando se quiere enviar una señal positiva se polariza llevando un 0 al cátodo del led emitiendo luz. Esta luz polariza en directa un fototransistor que lleva un nivel alto al integrado L293B. Estos componentes se usan para evitar que se dañen elementos electrónicos que necesitan tensiones muy estables, trabajan con corrientes muy bajas con posibles corrientes que generen los motores. En esta placa se encuentran las resistencias de pull-up que se utilizan para generar una corriente para poder polarizar correctamente los fototransistores. 10

11 4.3.- Placa de control. Esta es la placa de control, es la que contiene el microprocesador, la que se encarga de coordinar todos los elementos del robot para poder llevar a cabo el programa que le ha sido asignado. Este programa se le carga mediante el conversor MAX232 que se encuentra en la placa de comunicación PC-UC-Alimentación como se dijo anteriormente. En esta placa podemos encontrar el bus I2C, en los conectores J10, J22, J12 y J13, es un sistema de comunicación serie, en el que se pueden conectar distintos dispositivos de manera paralela. El microprocesador, se dirige a cada uno de ellos por una dirección que tienen asignada, así los datos que se envían por el bus I2C solo los reciben el microprocesador y el dispositivo al que se refiera esa dirección. Las características más salientes del bus I2C son: Se necesitan solamente dos líneas, la de datos (SDA) y la de reloj (SCL). Cada dispositivo conectado al bus tiene un código de dirección seleccionable mediante software. Habiendo permanentemente una relación Maestro/Eslavo entre el micro y los dispositivos conectados El bus permite la conexión de varios Maestros, ya que incluye un detector de colisiones. El protocolo de transferencia de datos y direcciones posibilita diseñar sistemas completamente definidos por software. Los datos y direcciones se transmiten con palabras de 8 bits. 11

12 Todos los sensores están conectados a la placa de control, porque necesitan estar cerca del microprocesador para que se meta la menor cantidad de ruido en la comunicación. Si se metiese ruido en la transmisión podrían llegar datos erróneos al microprocesador y el robot podría entrar en un subprograma al que no debiera en ese momento. Uno de los sensores que esta instalado es el GP2D12, infrarrojos, que funciona triangulando una luz que emite un diodo infrarrojo, esta luz choca con un objeto y dependiendo del ángulo a que forme el haz de luz que vuelve, el objeto estará mas cerca o mas lejos. es un sensor de El sensor, da una tensión proporcional a ese ángulo a que varia entre 0 y 3v. En las características del sensor se incluye una curva con la que se pude hallar la distancia dependiendo de la tensión que devuelva el sensor. â Con esta tensión se realiza una conversión analógico-digital y se lleva a un driver que mediante la puntualización de la curva característica del sensor, devuelve la distancia a la que se encuentra el objeto. Este sensor tiene que llevar en paralelo con la alimentación un condensador para evitar ruidos en la medida de distancia, es algo crucian que el robot sepa en todo momento donde se encuentra el oponente. Para poder atacar el la dirección correcta. En esta placa también esta conectado el sensor CN70, están situados en las cuatro esquinas del robot, este sensor se encarga de evitar que el robot abandone el tatami, leyendo en todo momento el color de la superficie donde esta, en el momento que lee un color blanco cualquiera de los sensores, el robot entrara en una interrupción para no salirse del tatami. Este sensor funciona con un fotodiodo que emite una luz y rebota en el suelo, según la reflexión del color de la superficie, un fototransistor que se encuentra dentro del sensor se polariza en directa en caso de que sea un color blanco y se queda en corte cuando es un color negro. En esta placa se encuentra un integrado 74HC14, es un integrado de puertas inversoras. Se pone un inversor a la salida del sensor, para estabilizar tensiones. 12
13 Dependiendo de la reflexión de la superficie, el fototransistor, tiene más intensidad de base, si la reflexión es baja habrá poca tensión, al entrar en la puerta inversora la salida tiene un nivel de tensión muy estable y muy definido. Lo único que hay que tener en cuenta es que cambia el nivel lógico Esta placa cuenta con un jumper de seguridad para poder configurar si se puede escribir o no en el microprocesador, otro jumper para elegir si se quiere el robot como teledirigido o en modo de combate autónomo. Para el modo teledirigido, el robot cuenta con una tarjeta receptora de datos. La Tarjeta Receptora de Datos CEBEK C-0504 es un circuito híbrido encargado de recibir vía radiofrecuencia, los datos digitales procedentes del Mando. La señal digital tiene que tener una frecuencia entre 20 Hz < fo < 4 KHz. y una portadora de 433,92 MHz. Este circuito demodula la señal de AM obteniendo los datos transmitidos. En esta parte también se encuentran los dos servos d acción, estos servos irán colocados en la parte delantera y en la parte trasera, y actuarán como palancas para intentar hacer perder la tracción al oponente. Estos servos funcionan con PWM generada por el mismo microprocesador. La PWM es una señal en la que se varía el ciclo de trabajo positivo pero no la frecuencia. El servo reacciona ante un periodo positivo y se mueve proporcionalmente al tiempo que tenga ese periodo. Estos servos trabajan de 0º a 180º que corresponde a un periodo de entre 0.6 ms los 0º y 2.3 ms los 180º. 0.6ms 0º 1.45ms 90º 2.03ms 180º La placa de control cuenta también con un pulsador de inicio, que hace que el microprocesador pare el programa de golpe y lo empiece desde el principio. Esto es por si en algún momento el robot se queda bloqueado en un bucle de un programa y no responde. 13

14 5.- Programas Programas de prueba Prueba de motores. Este programa prueba que los motores funcionan correctamente, tanto el cambio del sentido de giro como que tienen la suficiente fuerza. 14
15 ****************************Pruebamotores***************************** #include <16F876A.h> #fuses XT,NOWDT #use delay( clock = ) // Reloj de 4 MHz // Este fichero contiene todas los driver para pode interactuar con el micro. #BYTE TRISC = 0x87 //configuración de TRISC en la dirección 87h. #BYTE portc = 0x07 // PORTC en 07h. #BYTE TRISB = 0x86 // configuración de TRISB en la dirección 86h. #BYTE portb = 0x06 // PORTB en 06h. #BYTE TRISA = 0x85 // configuración de TRISA en la dirección 85h. #BYTE porta = 0x05 // PORTA en 05h. #BIT IN2 = 0x06.3 #BIT IN1 = 0x06.2 #BIT IN3 = 0x05.4 #BIT IN4 = 0X07.0 //Motor Derecho //Motor Derecho //Motor Izquierdo //Motor Izquierdo datos. datos. datos. void main(){ TRISB = 0B ; TRISA = 0B ; TRISC = 0B ; // Defines Puerto B como SALIDA=0 y ENTRADA =1 de // Defines Puerto A como SALIDA=0 y ENTRADA =1 de // Defines Puerto C como SALIDA=0 y ENTRADA =1 de while(1){ IN1= 0; IN2= 0; IN3= 0; IN4= 0; delay_ms(500); IN1= 0; IN2= 1; IN3= 0; IN4= 1; delay_ms(500); //bucle infinito. //Retardo IN1= 1; IN2= 1; IN3= 1; IN4= 1; delay_ms(500); 15

16 IN1= 1; IN2= 0; IN3= 1; IN4= 0; delay_ms(500); } } Prueba del servo de acción. Este programa será una interrupción, para una acción de ataque del robot. Cuando un sensor colocado en el brazo despegable se active este brazo subirá para hacer que el robot oponente pierda tracción. 16
17 *****************************Prueba_MOT_SER*************************************** #include <16F876A.h> #fuses XT,NOWDT #use delay( clock = ) // Reloj de 4 MHz #BYTE TRISC = 0x87 // TRISC en 87h. #BYTE portc = 0x07 // PORTC en 07h. #BYTE TRISB = 0x86 // TRISB en 86h. #BYTE portb = 0x06 // PORTB en 06h. #BYTE TRISA = 0x85 // TRISA en 85h. #BYTE porta = 0x05 // PORTA en 05h. #BIT RB1 = 0x06.1 #include <Servo_Futaba_10bit.c> void main(){ TRISB = 0B ; // Defines Puerto B como SALIDA=0 y ENTRADA =1 de datos. TRISC = 0B ; while(1){ //bucle infinito { if (rb1==0){ int16 TH; Inicializacion_Futaba_RC2(); // Inicialización del Servo en RC2 TH=57; Futaba_RC2(TH); delay_ms(500); // Posicionar el Servo de pa patilla RC2. TH=100; Futaba_RC2(TH); delay_ms(500); }else; // Posicionar el Servo de pa patilla RC2. } } } Prueba sensores CNY Los sensores CNY situados en los cuatro vértices del robot, evitan que este se salga. El programa de prueba, es el siguiente. 17

18 Para la prueba de sensores primero se testan los de la parte delantera y después los de la parte trasera. ******************************************CNY************************************************************************************ #include <16F876A.h> #fuses XT,NOWDT #use delay( clock = ) // Reloj de 4 MHz #BYTE TRISC = 0x87 // TRISC en 87h. #BYTE portc = 0x07 // PORTC en 07h. #BYTE TRISB = 0x86 // TRISB en 86h. #BYTE portb = 0x06 // PORTB en 06h. #BYTE TRISA = 0x85 // TRISA en 85h. #BYTE porta = 0x05 // PORTA en 05h. #BIT IN2 = 0x06.3 //Derecho #BIT IN1 = 0x06.2 //Derecho #BIT IN3 = 0x05.4 //Izquierdo #BIT IN4 = 0X07.0 //Izquierdo #BIT RB4 = 0x06.4 //Sensor trasero dcho #BIT RB5 = 0x06.5 //Sensor delantero dcho. #BIT RB6 = 0x06.6 //Sensor trasero izqd. #BIT RB7 = 0x06.7 //Sensor delantero izqd. void main(){ 18
19 TRISB = 0B ; TRISA = 0B ; TRISC = 0B ; // Defines Puerto B como SALIDA=0 y ENTRADA =1 de datos. // Defines Puerto A como SALIDA=0 y ENTRADA =1 de datos. // Defines Puerto C como SALIDA=0 y ENTRADA =1 de datos. while(1){ /*if(rb4==1 RB6==1){ IN1= 0; IN2= 1; IN3= 0; IN4= 1; }else{ IN1= 1; IN2= 0; IN3= 1; IN4= 0; }*/ Esta parte esta comentada, ahora estan a prueba los sensores delanteros que son RB7 y RB5 } if (RB7==1 RB5==1){ IN1= 0; IN2= 1; IN3= 0; IN4= 1; }else{ IN1= 1; IN2= 0; IN3= 1; IN4= 0; } } Programa sensores GP2D12 Para testear estos sensores se han hecho varios programas, primero cada sensor por separado y luego en conjunto. 19
 #include <driver_gp2d12.")
20 NO SI ************************************25CM******************************************* //**********Conversion Analogica Digital de la Patilla AN0 *********************************** #include <16F876A.h> #device adc=10 // Conversor Analogico Digital de 10 bit el PIC 16F876A puede trabajar con 8 o 10 bit de resolucion. #FUSES XT,NOWDT #use delay(clock= ) #include <driver_gp2d12.c> #BYTE TRISC = 0x87 // TRISC en 87h. #BYTE portc = 0x07 // PORTC en 07h. #BYTE TRISB = 0x86 // TRISB en 86h. #BYTE portb = 0x06 // PORTB en 06h. #BIT TA4 = 0x85.4 // TRISA en 85h. #BIT IN2 = 0x06.3 //Derecho 20
21 #BIT IN1 = 0x06.2 #BIT IN3 = 0x05.4 #BIT IN4 = 0X07.0 //Derecho //Izquierdo //Izquierdo //*******************************PROGRAMA PRINCIPAL************************************************************************** ******** void main(){ int16 q; float d, v; TRISB = 0B ; datos. TRISC = 0B ; datos. // Defines Puerto B como SALIDA=0 y ENTRADA =1 de // Defines Puerto C como SALIDA=0 y ENTRADA =1 de setup_adc_ports(0); ADCON1. // Seleccionamos el Puerto A como entradas Analogicas. Mirar setup_adc(adc_clock_internal); // Fuente de reloj RC interno. TA4 = 0; //Declaración de la patilla 4 del puerto A como salida a nivel de bit for (;;) { set_adc_channel(0); delay_ms(20); Tad. q = read_adc(); v = (5.0 * q) / ; // Bucle infinito. // HabilitaciOn canal 0 "AN0" // Retardo de 20uS necesaria para respetar el tiempo de Adquisicion // Lectura canal 0 "AN0" // Conversion a tension del codigo digital "q". d=gp2d12_v_d(v); } } if (d>=25&&d<=50){ IN1= 0; IN2= 1; IN3= 0; IN4= 1; }else{ IN1= 0; IN2= 0; IN3= 0; IN4= 0; } 21
22 Driver Gp2d12_v_d para calcular la distancia. //*****************************DRIVER DE CONTROL DEL SENSOR DE DISTANCIA Gp2d12, para una recta entre 10 cm y 55 cm. //HACE LA CONVERISON DE TENSION PROCEDENTE DEL SENSOR Gp2d12 A UNA DISTANCIA (SE OBTIENE UNA DISTANCIA EN FUNCION DE LA TENSIÓN). //SE INTRODUCE UN VALOR DE TENSIÓN (v)tipo FLOAT Y DEVUELVE UNA DISTANCIA (d)float. //****************************** DECLARACIÓN DE FUNCIONES************************************************************************* ** float Gp2d12_v_d(float); //****************************************FUNCIÓN Gp2d12_v_d******************************************************************* float Gp2d12_v_d(float v){ float l; l=0; if(v>2.6) l = 8; if(v<2.6&&v>=1.9) l = ((8-13.5)* (v - 1.9) /( )); if(v<1.9&&v>=1.65) l = 16 + (( )* (v- 1.65) / ( )); if(v<1.65&&v>=1.38) l = 20 + ((16-20)* (v- 1.38) / ( )); if(v<1.38&&v>=1.15) l = 25 + ((20-25)* (v- 1.15) / ( )); if(v<1.15&&v>=0.95) l = 30 + ((25-30)* (v- 0.95) / ( )); if(v<0.95&&v>=0.75) l = 40 + ((30-40)* (v- 0.75) / ( )); if(v<0.75&&v>=0.68) l = 45 + ((40-45)* (v- 0.68) / ( )); if(v<0.68&&v>=0.58) l = 55 + ((45-55)* (v- 0.58) / ( )); if(v<0.58) l=55; } return(l); 22
23 5.1.5 Programa de prueba de los dos sensores GP2D12 Este programa hace que el robot siga a un objeto centrándolo entre los dos sensores, cuando un sensor capta un objeto que este entre los 10 y los 50 cm gira hacia el, cuando lo detecta el segundo sensor, el robot irá hacia el objeto. NO NO SI SI //************************Conversión Analógica Digital de la Patilla AN0 ******************** #include <16F876A.h> #device adc=10 // Conversor Analógico Digital de 10 bit el PIC 16F876A puede trabajar con 8 o 10 bit de resolucion. #FUSES XT,NOWDT #use delay(clock= ) #include <driver_gp2d12.c> #BYTE TRISC = 0x87 // TRISC en 87h. #BYTE portc = 0x07 // PORTC en 07h. #BYTE TRISB = 0x86 // TRISB en 86h. 23
24 #BYTE portb = 0x06 // PORTB en 06h. #BIT TA4 = 0x85.4 // TRISA en 85h. #BIT IN2 = 0x06.3 #BIT IN1 = 0x06.2 #BIT IN3 = 0x05.4 #BIT IN4 = 0X07.0 //Derecho //Derecho //Izquierdo //Izquierdo //*******************************PROGRAMA PRINCIPAL************************************************************************** ******** void main(){ int16 q; float d, v; TRISB = 0B ; TRISC = 0B ; // Defines Puerto B como SALIDA=0 y ENTRADA =1 de datos. setup_adc_ports(0); ADCON1. // Seleccionamos el Puerto A como entradas Analogicas. Mirar setup_adc(adc_clock_internal); TA4 = 0; // Fuente de reloj RC interno. //Declaración de la patilla 4 del puerto A como salida a nivel de bit for (;;) { set_adc_channel(0); delay_ms(20); Tad. q = read_adc(); v = (5.0 * q) / ; // Bucle infinito. // HabilitaciOn canal 0 "AN0" // Retardo de 20uS necesaria para respetar el tiempo de Adquisicion // Lectura canal 0 "AN0" // Conversion a tension del codigo digital "q". d=gp2d12_v_d(v); if (d>=10&&d<=50){ IN1= 0; IN2= 1; }else{ IN1= 0; IN2= 0; } set_adc_channel(1); delay_ms(20); Tad. // HabilitaciOn canal 0 "AN1" // Retardo de 20uS necesaria para respetar el tiempo de Adquisicion 24

25 q = read_adc(); v = (5.0 * q) / ; // Lectura canal 0 "AN1" // Conversion a tension del codigo digital "q". d=gp2d12_v_d(v); if (d>=10&&d<=50){ ; IN3= 0; IN4= 1; }else{ IN1= 0; IN2= 0; } } } 5.2 Programa principal básico. Este programa hace que el robot gire sobre si mismo hasta que encuentre algún objeto que este entre 10 y 50 cm. Cuando lo encuentre se dirigirá hacia el, el motor asociado al sensor situado a la patilla RA1 siempre girará hacia delante, se sensoriza para tener controlada la distancia desde dos puntos. 25
26 //********************************Conversion Analogica Digital*************************** #include <16F876A.h> #device adc=10 // Conversor Analogico Digital de 10 bit el PIC 16F876A puede trabajar con 8 o 10 bit de resolucion. #FUSES XT,NOWDT #use delay(clock= ) #include <driver_gp2d12.c> #BYTE TRISC = 0x87 // TRISC en 87h. #BYTE portc = 0x07 // PORTC en 07h. #BYTE TRISB = 0x86 // TRISB en 86h. #BYTE portb = 0x06 // PORTB en 06h. #BIT TA4 = 0x85.4 // TRISA en 85h. #BIT IN2 = 0x06.3 #BIT IN1 = 0x06.2 #BIT IN3 = 0x05.4 #BIT IN4 = 0X07.0 //Derecho //Derecho //Izquierdo //Izquierdo //*******************************PROGRAMA PRINCIPAL************************************************************************** ******** void main(){ int16 q; float d, v; TRISB = 0B ; TRISC = 0B ; // Defines Puerto B como SALIDA=0 y ENTRADA =1 de datos. setup_adc_ports(0); ADCON1. // Seleccionamos el Puerto A como entradas Analogicas. Mirar setup_adc(adc_clock_internal); TA4 = 0; // Fuente de reloj RC interno. for (;;) { // Bucle infinito. set_adc_channel(0); // HabilitaciOn canal 0 "AN0" 26
27 delay_ms(20); Tad. q = read_adc(); v = (5.0 * q) / ; // Retardo de 20uS necesaria para respetar el tiempo de Adquisicion // Lectura canal 0 "AN0" // Conversion a tension del codigo digital "q". d=gp2d12_v_d(v); if (d>=10&&d<=50){ IN1= 0; IN2= 1; }else{ IN1= 1; IN2= 0; } set_adc_channel(1); delay_ms(20); Tad. q = read_adc(); v = (5.0 * q) / ; // HabilitaciOn canal 0 "AN1" // Retardo de 20uS necesaria para respetar el tiempo de Adquisicion // Lectura canal 0 "AN1" // Conversion a tension del codigo digital "q". d=gp2d12_v_d(v); if (d>=10&&d<=50){ ; IN3= 0; IN4= 1; }else{ IN1= 0; IN2= 1; } } } 6.- Fabricación de circuitos impresos Explicación de la fabricación Todas las placas que se han realizado para el robot, han sido desarrolladas con el programa Proteus. Primero se ha partido de un esquema electrónico del circuito que se quería fabricar, ese circuito se ha pasado a PCB (del inglés Printed Circuit Board), también utilizando otra herramienta del programa Proteus, dos de las tres placas se han realizado a doble cara, la tercera, la placa de fuente de alimentación- Comunicación PC-UC, ha sido a simple cara. 27

28 Para la fabricación, se ha cortado una placa de cobre del tamaño 70cm x 75cm y se ha taladrado con el CNC, pasando el archivo que contiene el mapeo de los agujeros al ordenador, que controla esta herramienta. La placa se ha positivado, para que al insolar se quede el circuito marcado en el positiv, liquido que se emplea para positivar. El circuito se ha impreso en un papel vegetal, y se ha realizado el centrado con respecto a los agujeros previamente hechos. Una vez centrado, se sujeta la placa al papel donde esta impreso el circuito y se mete en la insoladora. Se trata de un aparato que contiene tubos de luz ultravioleta, estos rayos, al chocar contra la placa positivada atacan el líquido positiv, en todos los sitios excepto donde se encuentran las pistas que al ser tonner negro no deja pasar los rayos ultravioleta, y es así como se marcan las pistas en el positivado. El siguiente proceso es el de revelado, este se lleva a cabo en una cubeta con sosa, se introduce la placa y se deja reposar para que la sosa elimine el positiv que ha sido atacado por los rayos UV. Una vez que la sosa ha revelado el circuito, se comprueba que el centrado ha sido correcto y se introduce al acido, en caso contrario, se limpia la placa, se positiva de nuevo y se volvería a empezar el proceso de fabricación desde este punto. En la etapa del acido, solo hay que introducir la placa en una cubeta con acido y este se encargara de eliminar todo el acido que no este cubierto por el circuito, en este punto hay que tener cuidado porque dependiendo de la proporción y la concentración del acido, la placa puede estar lista en unos pocos segundos o bien tardar mas. La placa en este momento ya esta lista para la inserción de los componentes, después de una comprobación para ver si el acido ha eliminado alguna pista. Para las placas de doble cara, el proceso solo varia en el punto del centrado, que habrá que centrar el circuito por las dos caras, antes de insolar Fabricación de la placa de alimentación-comunicación PC-UC - Esquema eléctrico de la placa: 28

29 Colocación de los componentes: 29

30 Cara de pistas 30
, para que sirva como disipador, para el regulador LM350K")
31 Cara de componentes: En esta placa se ha puesto una parte de cobre( zona marcada en rojo), para que sirva como disipador, para el regulador LM350K 31


32 Fabricación de la placa de potencia. - Esquema eléctrico de la placa. Colocación de los componentes: 32

33 Cara de pistas bottom copper: 33

34 Cara de pistas top copper: 34


35 Fabricación de la placa de control. - Esquema eléctrico de la placa. Colocación de los componentes: 35

36 Cara de pistas bottom copper: 36
37 Cara de pistas top copper: 37

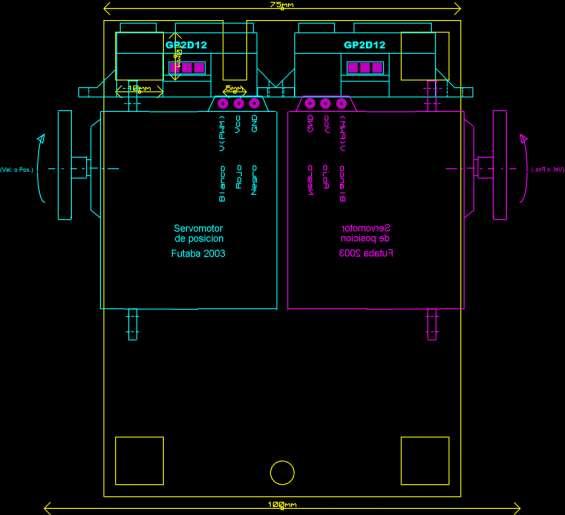
38 7.- Fabricación de la carrocería. S E R V O S E R V O El robot cuenta con dos bases esta es la inferior. Con la colocación de los motores y los servos de acción. Se pueden observar cuatro recortes cuadrados en los cuatro vértices, aquí van colocados los sensores CNY70. El servo de acción delantero cuenta con una apertura para que el brazo se pueda acoplar fácilmente sin que se salga de las medidas obligatorias. La base que va situada en la parte media es en la que van colocados los sensores de distancia GP2D12. y los servos que servirán como motores. Estos servos están trucados ya que pueden realizar el giro completo. 38
39 39
40 8.- Listado de precios Placa de fuente de alimentación-comunicación PC-UC 2 Resistencias Cantidad: Referencia: Valor: Precio: 1 R R Condensadores Cantidad: Referencia: Valor: Precio: 1 C1 2200uF C2, C4, C9 100nF C3 220uF C5-C8 1uF C15 10uF circuitos integrados Cantidad: Referencia: Valor: Precio: 1 U1 LM350K_JOAN 7 1 U2 MAX232_JOAN 2 4 Diodos Cantidad: Referencia: Valor: Precio: 3 D1, D2, D4 1N4007_JOAN D3 LED-GREEN_JOAN Miscellaneous Cantidad: Referencia: Valor: Precio: 1 BATERIA 9V 1 J1A CONN-H10_DANI 1 J11 CONN-D9M 1 JP1 BORNIER 2_JOAN 1 MASA3 BORNIER 1_JOAN 1 ON-OFF INTERRUPTOR_JOAN 1 RV1 5k 40
41 8.2.-Placa de potencia. 8 Resistencias cantidad Referencia Valor Precio 4 R12, R13, R20, 220 R21 4 R14, R15, R18, R19 10k 2 Condensadores cantidad Referencia Valor Precio 2 C11, C12 100nF 5 Circuitos integrados cantidad Referencia Valor Precio 4 U4-U7 OPTOCOUPLER-NPN 1 U10 L293B 8 Diodos cantidad Referencia Valor Precio 8 D5-D12 1N4007_JOAN 5 Miscellaneous cantidad Referencia Valor Precio 1 J2A CONN-H10 1 J3A BORNIER 2_JOAN 1 J15 BORNIER 1_JOAN 2 MO1, MO2 41
42 8.3.-Placa de control. 13 Resistencias Cantidad: Referencia Valor Precio 4 R4, R6, R8, R R5, R7, R9, R11, R22-10k R24 2 R16, R17 4K7 2 Condensadores Cantidad: Referencia Valor Precio 2 C13, C14 15pF 2 Circuitos integrados Cantidad: Referencia Valor Precio 1 U3 74HC14 1 U11 PIC16F876_JOAN 24 Miscellaneous Cantidad: Referencia Valor Precio 2 INFR1, INFR2 GP2D12 16X2 2 INICIO, PULSADOR_JOAN SENSOR_CONTACTO 2 J1, J2 CONN-SIL10_JOAN 2 J3, JP BORNIER 2_JOAN 6 J6-J9, JUMPER4, CONN_SIL3_JOAN PROGRM 4 J10, J12, J13, J22 CONN-SIL4 2 J14, J20 BORNIER 1_JOAN 1 RF1 CEBEK-C-0504_JOAN 2 SER1, SER2 SERVOMOTOR-PWM_JOAN 1 X1 CRYSTAL_JOAN 42
43 9.- Anexos -Pic16F
PROYECTO: Velocista y coche teledirigido
 PROYECTO: Velocista y coche teledirigido Departamento de Electricidad y Electrónica Ciclo Formativo de Grado Superior: Desarrollo de Productos Electrónicos Alumno: Profesores: Instituto: Localidad: Pedro
PROYECTO: Velocista y coche teledirigido Departamento de Electricidad y Electrónica Ciclo Formativo de Grado Superior: Desarrollo de Productos Electrónicos Alumno: Profesores: Instituto: Localidad: Pedro
Robot laberinto Raúl Antona Fresno PE21
 Faunos Laberinto (Robot laberinto) RAÚL ANTONA FRESNO Índice: Página INTRODUCCIÓN DEL PROYECTO. 2 2 DIAGRAMA EN BLOQUES. 6 2. EXPLICACIÓN DEL DIAGRAMA EN BLOQUES. 7 3 ESQUEMA ELECTRICO GENERAL. 8 3. EXPLICACIÓN
Faunos Laberinto (Robot laberinto) RAÚL ANTONA FRESNO Índice: Página INTRODUCCIÓN DEL PROYECTO. 2 2 DIAGRAMA EN BLOQUES. 6 2. EXPLICACIÓN DEL DIAGRAMA EN BLOQUES. 7 3 ESQUEMA ELECTRICO GENERAL. 8 3. EXPLICACIÓN
Mazo V2 Electrónica. Daniel Tello September 25, 2006
 Mazo V2 Electrónica Daniel Tello September 25, 2006 CAMPUS TECNOLÓGICO DE LA UNIVERSIDAD DE NAVARRA. NAFARROAKO UNIBERTSITATEKO CAMPUS TEKNOLOGIKOA Paseo de Manuel Lardizábal 13. 20018 Donostia-San Sebastián.
Mazo V2 Electrónica Daniel Tello September 25, 2006 CAMPUS TECNOLÓGICO DE LA UNIVERSIDAD DE NAVARRA. NAFARROAKO UNIBERTSITATEKO CAMPUS TEKNOLOGIKOA Paseo de Manuel Lardizábal 13. 20018 Donostia-San Sebastián.
Competencia de Robótica JOHNNY
 Competencia de Robótica JOHNNY 5 2015 Categoría: MINISUMO Nombre del Robot: CORAJE Institución: EEST Nro. 6 SAN NICOLAS Participantes: RAMIRO MARTIN PAEZ ELIO ANTONIO PAEZ RODRIGO NICOLAS PAEZ El robot
Competencia de Robótica JOHNNY 5 2015 Categoría: MINISUMO Nombre del Robot: CORAJE Institución: EEST Nro. 6 SAN NICOLAS Participantes: RAMIRO MARTIN PAEZ ELIO ANTONIO PAEZ RODRIGO NICOLAS PAEZ El robot
PROFESOR: Práctica 9. Convertidor Analógico-Digital
 INSTITUTO POLITÉCNICO NACIONAL Centro de Estudios Científicos y Tecnológicos Nº 1 Gonzalo Vázquez Vela Academia de Sistemas Digitales Prácticas de Micro Electrónica Programable NOMBRE DEL ALUMNO: Apellido
INSTITUTO POLITÉCNICO NACIONAL Centro de Estudios Científicos y Tecnológicos Nº 1 Gonzalo Vázquez Vela Academia de Sistemas Digitales Prácticas de Micro Electrónica Programable NOMBRE DEL ALUMNO: Apellido
CONVERTIDOR ANÁLOGICO-DIGITAL (ADC)
") Aplicar los conocimientos básicos de electrónica de manera teórica (lenguaje ANSI-C) y práctica (montaje de circuitos). Conocer las funciones que gobiernan las entradas y salidas del microcontrolador PIC18F47J53.
Aplicar los conocimientos básicos de electrónica de manera teórica (lenguaje ANSI-C) y práctica (montaje de circuitos). Conocer las funciones que gobiernan las entradas y salidas del microcontrolador PIC18F47J53.
EL módulo conversor A/D. (c) Domingo Llorente
 Domingo Llorente") EL módulo conversor A/D (c) Domingo Llorente 2010 1 Características del conversor A/D Ocho entradas de señal analógica. (5 para el 16F876x) Resolución de la conversión de 10 bits. (0-1024) Distintas fuentes
EL módulo conversor A/D (c) Domingo Llorente 2010 1 Características del conversor A/D Ocho entradas de señal analógica. (5 para el 16F876x) Resolución de la conversión de 10 bits. (0-1024) Distintas fuentes
1.1. Memoria Descriptiva Objeto Antecedentes
 1.1. Memoria Descriptiva 1.1.1. Objeto El propósito de nuestro proyecto es la de desarrollar una insoladora, de tal manera, que se pueda quedar en el colegio Salesiano, San Bartolomé y pueda complementar
1.1. Memoria Descriptiva 1.1.1. Objeto El propósito de nuestro proyecto es la de desarrollar una insoladora, de tal manera, que se pueda quedar en el colegio Salesiano, San Bartolomé y pueda complementar
TUTORIAL II parte A. Observemos el diagrama de pines del microcontrolador 16F877A:
 1 TUTORIAL II parte A OBJETIVOS Conocer el manejo de puertos del microcontrolador 16F877A, registros TRIS y PORT. Familiarizarse con las principales instrucciones del lenguaje y la estructura de un programa
1 TUTORIAL II parte A OBJETIVOS Conocer el manejo de puertos del microcontrolador 16F877A, registros TRIS y PORT. Familiarizarse con las principales instrucciones del lenguaje y la estructura de un programa
Sesión II: Elementos de un Robot
 Sesión II: Elementos de un Robot Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Sesiones Robótica Comunidad de Madrid, UPSAM Abr, 2005 ÍNDICE Introducción Estructura mecánica Motores
Sesión II: Elementos de un Robot Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Sesiones Robótica Comunidad de Madrid, UPSAM Abr, 2005 ÍNDICE Introducción Estructura mecánica Motores
Proyecto Rastreador + Coche Teledirigido
 Proyecto Rastreador + Coche Teledirigido Profesor: Pedro Alonso Sanz Instituto: I.E.S. Joan Miró Localidad: San Sebastián de los Reyes Curso: Enero_009 Índice de contenido.- Explicación breve del Proyecto....-
Proyecto Rastreador + Coche Teledirigido Profesor: Pedro Alonso Sanz Instituto: I.E.S. Joan Miró Localidad: San Sebastián de los Reyes Curso: Enero_009 Índice de contenido.- Explicación breve del Proyecto....-
SIMIOBOARD JOYSTICK MANUAL E INICIO RAPIDO
 SIMIOBOARD JOYSTICK MANUAL E INICIO RAPIDO Date: 11/04/2014 INDICE 1. Descripción... 3 2. Alimentación y Consumo eléctrico... 4 3. Dimensiones... 5 4. Conexionado de componentes.... 6 5. Conexionado al
SIMIOBOARD JOYSTICK MANUAL E INICIO RAPIDO Date: 11/04/2014 INDICE 1. Descripción... 3 2. Alimentación y Consumo eléctrico... 4 3. Dimensiones... 5 4. Conexionado de componentes.... 6 5. Conexionado al
Robótica en la Universidad
 Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Desarrollo de Productos Electrónicos
 Examen de problemas de la 2ª evaluación NOTA: explicar detalladamente todo lo que se haga. Problema 1 (3p) Curso 2009/2010 Desarrollo de Productos Electrónicos Lógica Digital y Microprogramable En una
Examen de problemas de la 2ª evaluación NOTA: explicar detalladamente todo lo que se haga. Problema 1 (3p) Curso 2009/2010 Desarrollo de Productos Electrónicos Lógica Digital y Microprogramable En una
GRUPO 26. IVÁN DÍAZ CHACÓN JOSÉ JAIME ARIZA LUÍS ZAVARGO PECHE
 GRUPO 26 IVÁN DÍAZ CHACÓN (malake@clientes.unicaja.es) JOSÉ JAIME ARIZA (jariza@mixmail.com) LUÍS ZAVARGO PECHE (zavargo@terra.es) 3º A ÍNDICE 1.- Funcionalidades y especificaciones... pág 1. 1.1.- Suplementos
GRUPO 26 IVÁN DÍAZ CHACÓN (malake@clientes.unicaja.es) JOSÉ JAIME ARIZA (jariza@mixmail.com) LUÍS ZAVARGO PECHE (zavargo@terra.es) 3º A ÍNDICE 1.- Funcionalidades y especificaciones... pág 1. 1.1.- Suplementos
MiniLab Presentación
 MiniLab 00 Presentación El circuito de Minilab está diseñado como herramienta para los trabajos prácticos de la materia de Técnicas Digitales y para la práctica de la electrónica digital en general, permitiendo
MiniLab 00 Presentación El circuito de Minilab está diseñado como herramienta para los trabajos prácticos de la materia de Técnicas Digitales y para la práctica de la electrónica digital en general, permitiendo
Descripción del proyecto
 Descripción del proyecto Circuito: En este proyecto se desarrolló una baquelita de fibra que conforma el cuerpo del carro velocista, en esta baquelita se encuentran las pistas que unen los diversos periféricos.
Descripción del proyecto Circuito: En este proyecto se desarrolló una baquelita de fibra que conforma el cuerpo del carro velocista, en esta baquelita se encuentran las pistas que unen los diversos periféricos.
5. CONSTRUCCIÓN a) Montar la plataforma móvil según sus instrucciones. b) Soldar un trozo de 20 cm de hilo rígido a los terminales de las reductoras.
 Montar la plataforma móvil según sus instrucciones. b) Soldar un trozo de 20 cm de hilo rígido a los terminales de las reductoras.") 1. OBJETIVOS Construir un coche seguidor de línea negra controlado por arduino. 2. FOTOGRAFÍA Leer todas las instrucciones y comprobar el listado de materiales antes de empezar el proyecto. 3. FUNCIONAMIENTO
1. OBJETIVOS Construir un coche seguidor de línea negra controlado por arduino. 2. FOTOGRAFÍA Leer todas las instrucciones y comprobar el listado de materiales antes de empezar el proyecto. 3. FUNCIONAMIENTO
Medidor de distancias En esta actividad utilizaremos un sensor de ultrasonidos como medidor de distancias
 1.2.15. Sensor Digital: Ultrasonidos En este apartado vamos a realizar varias actividades en donde utilizaremos los sensores de ultrasonido. Como veremos más adelante, un sensor de ultrasonido, al igual
1.2.15. Sensor Digital: Ultrasonidos En este apartado vamos a realizar varias actividades en donde utilizaremos los sensores de ultrasonido. Como veremos más adelante, un sensor de ultrasonido, al igual
Diagrama de bloques del sistema
 Software de control: Diagrama de bloques del sistema Para controlar todos los parámetros de funcionamiento de la pila de combustible, se ha creado un software específico, este funciona como se muestra
Software de control: Diagrama de bloques del sistema Para controlar todos los parámetros de funcionamiento de la pila de combustible, se ha creado un software específico, este funciona como se muestra
Medidas de Distancia mediante Rayos Infrarrojos
 Medidas de Distancia mediante Rayos Infrarrojos Con un nuevo módulo sensor de proximidad. La casa Sharp ha fabricado un nuevo sensor, en la forma del módulo GP2D02 que, con la ayuda de un microcontrolador,
Medidas de Distancia mediante Rayos Infrarrojos Con un nuevo módulo sensor de proximidad. La casa Sharp ha fabricado un nuevo sensor, en la forma del módulo GP2D02 que, con la ayuda de un microcontrolador,
PROFESOR: Práctica 5. Manejo de Motores
 INSTITUTO POLITÉCNICO NACIONAL Centro de Estudios Científicos y Tecnológicos Nº 1 Gonzalo Vázquez Vela Academia de Sistemas Digitales Prácticas de Micro Electrónica Programable NOMBRE DEL ALUMNO: Apellido
INSTITUTO POLITÉCNICO NACIONAL Centro de Estudios Científicos y Tecnológicos Nº 1 Gonzalo Vázquez Vela Academia de Sistemas Digitales Prácticas de Micro Electrónica Programable NOMBRE DEL ALUMNO: Apellido
Curso Robótica Práctica
 TÍTULO DE LA UNIDAD DIDÁCTICA Montaje de distintos proyectos fundamentales con ambos entornos: Placa controladora PICAXE. Placa controladora ARDUINO. CURSO 3º-4º ESO DESCRIPCIÓN DE LA UNIDAD DIDÁCTICA
TÍTULO DE LA UNIDAD DIDÁCTICA Montaje de distintos proyectos fundamentales con ambos entornos: Placa controladora PICAXE. Placa controladora ARDUINO. CURSO 3º-4º ESO DESCRIPCIÓN DE LA UNIDAD DIDÁCTICA
CONTROL AUTOMÁTICO CON ARDUINO
 CONTROL AUTOMÁTICO CON ARDUINO TECNOLOGIA Juan Crespo López Señal analógica: es una señal que puede tomar infinitos valores Señal digital: Es una señal que solo puede tomar dos valores 0 y 1 normalmente
CONTROL AUTOMÁTICO CON ARDUINO TECNOLOGIA Juan Crespo López Señal analógica: es una señal que puede tomar infinitos valores Señal digital: Es una señal que solo puede tomar dos valores 0 y 1 normalmente
DOCUMENTACIÓN PARA LA FABRICACIÓN DE LA PLATAFORMA GUADALBOT
 DOCUMENTACIÓN PARA LA FABRICACIÓN DE LA PLATAFORMA GUADALBOT I.E.S VIRGEN DE LAS NIEVES Placa para la interconexión de las plataformas GuadalBot y MoniBot Página 2. Descripción y Lista de materiales Página
DOCUMENTACIÓN PARA LA FABRICACIÓN DE LA PLATAFORMA GUADALBOT I.E.S VIRGEN DE LAS NIEVES Placa para la interconexión de las plataformas GuadalBot y MoniBot Página 2. Descripción y Lista de materiales Página
El objeto de este proyecto es el de construir un robot araña controlado por un PIC16F84A.
 .. Memoria Descriptiva... Objeto El objeto de este proyecto es el de construir un robot araña controlado por un PIC6F8A.... Antecedentes El diseño original no se llegó a realizar en circuito impreso, en
.. Memoria Descriptiva... Objeto El objeto de este proyecto es el de construir un robot araña controlado por un PIC6F8A.... Antecedentes El diseño original no se llegó a realizar en circuito impreso, en
Sensores compactos medidores de distancias de alta sensibilidad
 Sensores compactos medidores de distancias de alta sensibilidad Sección escrita y coordinada por: Fernando Remiro Modelo Introducción: Los IR Sharp GP2DXX son una familia de sensores de infrarrojos para
Sensores compactos medidores de distancias de alta sensibilidad Sección escrita y coordinada por: Fernando Remiro Modelo Introducción: Los IR Sharp GP2DXX son una familia de sensores de infrarrojos para
GUIA DE EJERCICIOS Nº 2 INSTRUMENTACIÓN AVANZADA
 GUIA DE EJERCICIOS Nº 2 INSTRUMENTACIÓN AVANZADA Comunicando LabVIEW a un PIC18F2550 1 2.-COMUNICANDO LABVIEW A UN PIC18F2550 Ejercicio 2.1 Tomando el ejercicio 1.4 realizar los ajustes necesarios para
GUIA DE EJERCICIOS Nº 2 INSTRUMENTACIÓN AVANZADA Comunicando LabVIEW a un PIC18F2550 1 2.-COMUNICANDO LABVIEW A UN PIC18F2550 Ejercicio 2.1 Tomando el ejercicio 1.4 realizar los ajustes necesarios para
proyecto: robot hexápodo (spidy.00)
") proyecto: robot hexápodo (spidy.00) Departamento de Electricidad-Electrónica Alumnos: Rodrigo García Martín Jesús Torrejón López Instituto: I.E.S. Joan Miró Localidad: San Sebastián de los Reyes Curso:
proyecto: robot hexápodo (spidy.00) Departamento de Electricidad-Electrónica Alumnos: Rodrigo García Martín Jesús Torrejón López Instituto: I.E.S. Joan Miró Localidad: San Sebastián de los Reyes Curso:
Diseño e implementación de un equipo de prácticas de control automático
 Pantalla de funcionamiento manual. Esperando datos de entrada y salida (corriente, tensión o posición) 5 Esquemas eléctricos 5.1 Placa principal. En el esquema eléctrico general que se representa más adelante
Pantalla de funcionamiento manual. Esperando datos de entrada y salida (corriente, tensión o posición) 5 Esquemas eléctricos 5.1 Placa principal. En el esquema eléctrico general que se representa más adelante
PROFESOR: Práctica 10. Modulación por ancho de pulso (PWM) Emplea un microcontrolador para procesamiento de señales analógicas y digitales
 Emplea un microcontrolador para procesamiento de señales analógicas y digitales") INSTITUTO POLITÉCNICO NACIONAL Centro de Estudios Científicos y Tecnológicos Nº 1 Gonzalo Vázquez Vela Academia de Sistemas Digitales Prácticas de Micro Electrónica Programable NOMBRE DEL ALUMNO: Apellido
INSTITUTO POLITÉCNICO NACIONAL Centro de Estudios Científicos y Tecnológicos Nº 1 Gonzalo Vázquez Vela Academia de Sistemas Digitales Prácticas de Micro Electrónica Programable NOMBRE DEL ALUMNO: Apellido
UNIDAD 5 Las señales analógicas
 UNIDAD 5 Las señales analógicas Objetivo y Programa de la Unidad 5 Objetivo de la presentación Presentar las ideas principales acerca de las señales analógicas y el uso de diferentes tipos de periféricos
UNIDAD 5 Las señales analógicas Objetivo y Programa de la Unidad 5 Objetivo de la presentación Presentar las ideas principales acerca de las señales analógicas y el uso de diferentes tipos de periféricos
A.- Electrones fluyendo por un buen conductor eléctrico, que ofrece baja resistencia.
 DEPARTAMENTO DE ORIENTACIÓN: TECNOLOGÍA 4E_F Primer trimestre Curso: 2014/2015 TEMA II: ELECTRICIDAD Y ELECTRÓNICA La electrónica forma parte de nuestra vida cotidiana.- Los electrodomésticos, los medios
DEPARTAMENTO DE ORIENTACIÓN: TECNOLOGÍA 4E_F Primer trimestre Curso: 2014/2015 TEMA II: ELECTRICIDAD Y ELECTRÓNICA La electrónica forma parte de nuestra vida cotidiana.- Los electrodomésticos, los medios
Se recomienda consultar el siguiente enlace y el datasheet del PIC18F2550.
 Se recomienda consultar el siguiente enlace y el datasheet del PIC18F2550. http://picfernalia.blogspot.com.es/2012/07/conversor-adc.html ADCON0: - ADON: Habilita el módulo convertidor A/D. - GO/DONE: Con
Se recomienda consultar el siguiente enlace y el datasheet del PIC18F2550. http://picfernalia.blogspot.com.es/2012/07/conversor-adc.html ADCON0: - ADON: Habilita el módulo convertidor A/D. - GO/DONE: Con
Robot seguidor de línea C-9806
 Robot seguidor de línea C9806 Antes de empezar el montaje, comprobar que estén todas las piezas. El Robot seguidor, es un robot que sigue cualquier línea que esta marcada en el suelo. Puedes crear tu propio
Robot seguidor de línea C9806 Antes de empezar el montaje, comprobar que estén todas las piezas. El Robot seguidor, es un robot que sigue cualquier línea que esta marcada en el suelo. Puedes crear tu propio
PROYECTO INTEGRADO BICHOBOTS
 PROYECTO INTEGRADO BICHOBOTS Víctor Jesús Morilla Banderas Desarrollo de productos electrónicos Proyecto Integrado 1. MEMORIA INDICE Objetivos Bichobots: Bigotes o Descripción o Esquema o Funcionamiento
PROYECTO INTEGRADO BICHOBOTS Víctor Jesús Morilla Banderas Desarrollo de productos electrónicos Proyecto Integrado 1. MEMORIA INDICE Objetivos Bichobots: Bigotes o Descripción o Esquema o Funcionamiento
Practicas de INTERFACES ELECTRO-ÓPTICOS PARA COMUNICACIONES
 Practicas de INTERFACES ELECTROÓPTICOS PARA COMUNICACIONES Francisco Javier del Pino Suárez Práctica 1. Fotorresistencias Objetivos Esta práctica está dedicada al estudio de las fotorresistencias. A partir
Practicas de INTERFACES ELECTROÓPTICOS PARA COMUNICACIONES Francisco Javier del Pino Suárez Práctica 1. Fotorresistencias Objetivos Esta práctica está dedicada al estudio de las fotorresistencias. A partir
PIC 16F87X. Juan González. Escuela Politécnica Superior Universidad Autónoma de Madrid. Flir Networked Systems. Flir Networked Systems
 PIC 16F87X Juan González Andrés Prieto-Moreno Ricardo Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Flir Networked Systems Flir Networked Systems Curso de microcontroladores PIC. Semana
PIC 16F87X Juan González Andrés Prieto-Moreno Ricardo Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Flir Networked Systems Flir Networked Systems Curso de microcontroladores PIC. Semana
TEMA 3 ELECTRÓNICA TECNOLOGÍA 3º ESO. Samuel Escudero Melendo
 TEMA 3 ELECTRÓNICA TECNOLOGÍA 3º ESO Samuel Escudero Melendo QUÉ VEREMOS? CONCEPTOS BÁSICOS ELECTRICIDAD y ELECTRÓNICA CANTIDAD DE CARGA, INTENSIDAD, VOLTAJE, RESISTENCIA LEY DE OHM ELEMENTOS DE CIRCUITOS
TEMA 3 ELECTRÓNICA TECNOLOGÍA 3º ESO Samuel Escudero Melendo QUÉ VEREMOS? CONCEPTOS BÁSICOS ELECTRICIDAD y ELECTRÓNICA CANTIDAD DE CARGA, INTENSIDAD, VOLTAJE, RESISTENCIA LEY DE OHM ELEMENTOS DE CIRCUITOS
4 Actuadores eléctricos. Alfaomega. Material Web. Arduino control de servomotores a pasos 2
 4 Actuadores eléctricos Capítulo Material Web Arduino control de servomotores a pasos 2 2 Actuadores eléctricos 4.1. 4.1 Arduino control de servomotores a pasos Un servomotor de pasos es un sistema formado
4 Actuadores eléctricos Capítulo Material Web Arduino control de servomotores a pasos 2 2 Actuadores eléctricos 4.1. 4.1 Arduino control de servomotores a pasos Un servomotor de pasos es un sistema formado
CAPÍTULO 3: DESCRIPCIÓN HARDWARE DEL
 CAPÍTULO 3: DESCRIPCIÓN HARDWARE DEL SISTEMA INFODINA. 1.- INTRODUCCIÓN. Como ya se ha mencionado anteriormente, el sistema InfoDina está constituido por dos módulos: una parte hardware, constituida por
CAPÍTULO 3: DESCRIPCIÓN HARDWARE DEL SISTEMA INFODINA. 1.- INTRODUCCIÓN. Como ya se ha mencionado anteriormente, el sistema InfoDina está constituido por dos módulos: una parte hardware, constituida por
COMPONENTES ELECTRÓNICOS ANALÓGICOS Página 1 de 7
 COMPONENTES ELECTRÓNICOS ANALÓGICOS Página 1 de 7 SEMICONDUCTORES Termistores Foto resistores Varistores Diodo Rectificador Puente Rectificador Diodo de Señal Diodo PIN Diodo Zener Diodo Varactor Fotodiodo
COMPONENTES ELECTRÓNICOS ANALÓGICOS Página 1 de 7 SEMICONDUCTORES Termistores Foto resistores Varistores Diodo Rectificador Puente Rectificador Diodo de Señal Diodo PIN Diodo Zener Diodo Varactor Fotodiodo
MICROCONTROLADORES. 1. El PIC 16F84A es un microcontrolador de: a) 16 bits b) 8 bits c) 4 bits d) 32 bits e) 64 bits
 16 bits b) 8 bits c) 4 bits d) 32 bits e) 64 bits") 1. El PIC 16F84A es un microcontrolador de: a) 16 bits b) 8 bits c) 4 bits d) 32 bits e) 64 bits MICROCONTROLADORES 2. La memoria de programa del PIC 16F84A es de tipo: a) ROM b) OTP c) RAM d) EPROM e)
1. El PIC 16F84A es un microcontrolador de: a) 16 bits b) 8 bits c) 4 bits d) 32 bits e) 64 bits MICROCONTROLADORES 2. La memoria de programa del PIC 16F84A es de tipo: a) ROM b) OTP c) RAM d) EPROM e)
Módulo de control para secciones de vía
 Normas Europeas de Modelismo Módulo de control para secciones de vía NEM 695 Página 1 de 5 Recomendación Edición 2013 1. Objetivo de la norma Esta norma describe las funciones así como los niveles y el
Normas Europeas de Modelismo Módulo de control para secciones de vía NEM 695 Página 1 de 5 Recomendación Edición 2013 1. Objetivo de la norma Esta norma describe las funciones así como los niveles y el
1.1. Memoria Descriptiva
 .. Memoria Descriptiva Víctor Orozco Valle ... Objeto El objeto de este proyecto es el de construir desde cero, la maqueta de un ascensor con los sensores y accionamientos necesarios para simular el comportamiento
.. Memoria Descriptiva Víctor Orozco Valle ... Objeto El objeto de este proyecto es el de construir desde cero, la maqueta de un ascensor con los sensores y accionamientos necesarios para simular el comportamiento
LUCES SECUENCIALES REVERSIBLES DE 6 LED. Simula que tienes un scanner o una alarma en tu vehículo
 LUCES SECUENCIALES REVERSIBLES DE 6 LED Simula que tienes un scanner o una alarma en tu vehículo Tabla de Contenido DEFINICIÓN FUNCIONAMIENTO LISTA DE PARTES ENSAMBLE DEFINICIÓN 4017 El 4017b es un circuito
LUCES SECUENCIALES REVERSIBLES DE 6 LED Simula que tienes un scanner o una alarma en tu vehículo Tabla de Contenido DEFINICIÓN FUNCIONAMIENTO LISTA DE PARTES ENSAMBLE DEFINICIÓN 4017 El 4017b es un circuito
 http://jorgefloresvergaray.blogspot.com/2009/07/un-carrito-seguidor-de-lineasencillo.html Un carrito seguidor de línea sencillo Este es el avance de un muy simple seguidor de líneas basado en un fototransistor
http://jorgefloresvergaray.blogspot.com/2009/07/un-carrito-seguidor-de-lineasencillo.html Un carrito seguidor de línea sencillo Este es el avance de un muy simple seguidor de líneas basado en un fototransistor
Actuadores eléctricos - Motores
 Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
Servomotores Un servomotor es básicamente un actuador mecánico que contine un motor eléctrico y un conjunto de engranajes que permiten multiplicar el torque del sistema final y tiene la capacidad de ser
IES Federico García Lorca Departamento de TECNOLOGÍA. IES Federico García Lorca TECNOLOGÍA. Alumno/a:: Alumno/a:: 3º ESO Curso 12/13
 IES Federico García Lorca Alumno/a:: Alumno/a:: CURSO: 3º FECHA: 3º ESO Curso 12/13 PRÁCTICAS DE ELECTRICIDAD SIMULACIÓN TALLER PRÁCTICA Nº1.- LEY DE OHM. PROGRAMA COCODRILE CLIP Montaje Nº 1. Ley de OHM.
IES Federico García Lorca Alumno/a:: Alumno/a:: CURSO: 3º FECHA: 3º ESO Curso 12/13 PRÁCTICAS DE ELECTRICIDAD SIMULACIÓN TALLER PRÁCTICA Nº1.- LEY DE OHM. PROGRAMA COCODRILE CLIP Montaje Nº 1. Ley de OHM.
ÍNDICE MEMORIA ECONÓMICA
 ÍNDICE MEMORIA ECONÓMICA Índice Memoria Económica... 1 Abreviaturas... 2 Índice de figuras... 2 Índice de tablas... 2 Capítulo 1: Coste del prototipo... 3 1.1. Introducción... 3 1.2. Importe horario...
ÍNDICE MEMORIA ECONÓMICA Índice Memoria Económica... 1 Abreviaturas... 2 Índice de figuras... 2 Índice de tablas... 2 Capítulo 1: Coste del prototipo... 3 1.1. Introducción... 3 1.2. Importe horario...
TREMEX PULSER. El activador digital para baterías de plomo
 Las conexiones en la batería de plomo TREMEX PULSER Conecte el terminal del cable azul al terminal negativo y el terminal del cable rojo al terminal positivo de la batería. Por favor, preste atención a
Las conexiones en la batería de plomo TREMEX PULSER Conecte el terminal del cable azul al terminal negativo y el terminal del cable rojo al terminal positivo de la batería. Por favor, preste atención a
NO ES NECESARIO MONTAR
 1.- INTRODUCCION El ARS-Shield en un circuito impreso en el que se puede instalar un módulo Arduido, (p.e. UNO) y que junto con el software de K3NG sirve como interface para el control de motores (Acimut
1.- INTRODUCCION El ARS-Shield en un circuito impreso en el que se puede instalar un módulo Arduido, (p.e. UNO) y que junto con el software de K3NG sirve como interface para el control de motores (Acimut
Inter.face de comunicación RS 232 de empotrar Referencia: /8455.9
 Inter.face de comunicación RS 232 de empotrar Este módulo de aplicación de interface serie se utiliza para conectar un PC al EIB y se coloca en un acoplador bus empotrado. Se puede integrar dentro del
Inter.face de comunicación RS 232 de empotrar Este módulo de aplicación de interface serie se utiliza para conectar un PC al EIB y se coloca en un acoplador bus empotrado. Se puede integrar dentro del
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Muestreo de señales analógicas Principal requerimiento que surge al muestrear una señal continua: Definir el periodo de muestreo con suficiente exactitud. Ajustar el mismo a un valor adecuado de acuerdo
Muestreo de señales analógicas Principal requerimiento que surge al muestrear una señal continua: Definir el periodo de muestreo con suficiente exactitud. Ajustar el mismo a un valor adecuado de acuerdo
Práctica 5 Diseño de circuitos con componentes básicos.
 Práctica 5 Diseño de circuitos con componentes básicos. Descripción de la práctica: -Con esta práctica, se pretende realizar circuitos visualmente útiles con componentes más simples. Se afianzarán conocimientos
Práctica 5 Diseño de circuitos con componentes básicos. Descripción de la práctica: -Con esta práctica, se pretende realizar circuitos visualmente útiles con componentes más simples. Se afianzarán conocimientos
I.E.S. Joan Miró (S.S. de los Reyes) / Dpto. Electrónica. Proyecto RASTREADOR. Departamento de Electricidad-Electrónica
 / Dpto. Electrónica. Proyecto RASTREADOR. Departamento de Electricidad-Electrónica") Proyecto RSTREDOR Departamento de Electricidad-Electrónica lumno: lvar Martín del Hoyo Instituto: I.E.S. Joan Miró Localidad: San Sebastián de los Reyes Curso: 008/009 INDICE.- Explicación breve del Proyecto.....-
Proyecto RSTREDOR Departamento de Electricidad-Electrónica lumno: lvar Martín del Hoyo Instituto: I.E.S. Joan Miró Localidad: San Sebastián de los Reyes Curso: 008/009 INDICE.- Explicación breve del Proyecto.....-
PRÁCTICA 8-9. FABRICACIÓN DE CIRCUITO IMPRESO
 PRÁCTICA 8-9. FABRICACIÓN DE CIRCUITO IMPRESO 1. Objetivo En la práctica 8 se pretende enseñar al alumno la fabricación de una placa de circuito impreso, o PCB (Printed Circuit Board). El proceso completo
PRÁCTICA 8-9. FABRICACIÓN DE CIRCUITO IMPRESO 1. Objetivo En la práctica 8 se pretende enseñar al alumno la fabricación de una placa de circuito impreso, o PCB (Printed Circuit Board). El proceso completo
9. Plataforma Desarrollo del ATmega
 9. Plataforma Desarrollo del ATmega 9.1. WIN AVR Contiene todas las librerías necesarias para el desarrollo de aplicaciones en los microprocesadores AVR de Atmel. Al instalarlo sobre el PC se podrán realizar
9. Plataforma Desarrollo del ATmega 9.1. WIN AVR Contiene todas las librerías necesarias para el desarrollo de aplicaciones en los microprocesadores AVR de Atmel. Al instalarlo sobre el PC se podrán realizar
Características del sistema
 BARRERA ELECTROMECÁNICA Introducción Consiste en una barrera totalmente automatizada. El programa se inicia accionando un pulsador. Posee un semáforo para permitir o no el paso y un sensor infrarrojo que
BARRERA ELECTROMECÁNICA Introducción Consiste en una barrera totalmente automatizada. El programa se inicia accionando un pulsador. Posee un semáforo para permitir o no el paso y un sensor infrarrojo que
Seguidor de líneas Un carrito seguidor de linea sencillo
 Seguidor de líneas Un carrito seguidor de linea sencillo Este es el avance de un muy simple seguidor de lineas basado en un fototransistor y un diodo emisor infrarrojo o en el conocido optoacoplador CNY70
Seguidor de líneas Un carrito seguidor de linea sencillo Este es el avance de un muy simple seguidor de lineas basado en un fototransistor y un diodo emisor infrarrojo o en el conocido optoacoplador CNY70
En este capítulo se describirá los pasos que se siguieron para la elaboración
 Capítulo 4: Diseño electrónico En este capítulo se describirá los pasos que se siguieron para la elaboración electrónica de los circuitos del prototipo. Las opciones que se consideraron y las decisiones
Capítulo 4: Diseño electrónico En este capítulo se describirá los pasos que se siguieron para la elaboración electrónica de los circuitos del prototipo. Las opciones que se consideraron y las decisiones
Seminario de Diseño y Construcción de Microrrobots:
 Seminario de Diseño y Construcción de Microrrobots: SENSORES Alumno: Adrián Marcelo Díaz Collazo Plan de estudio: Ing. Técnica Industrial en electrónica Sensores: Normalmente se usan para detectar obstáculos,
Seminario de Diseño y Construcción de Microrrobots: SENSORES Alumno: Adrián Marcelo Díaz Collazo Plan de estudio: Ing. Técnica Industrial en electrónica Sensores: Normalmente se usan para detectar obstáculos,
Programar posiciones en un Micro Servo Tower Pro SG90 9G
 Programar posiciones en un Micro Servo Tower Pro SG90 9G (Recopilado de Internet. Revision Prof: Bolaños DJB) Versión: 12-04-18 Los servos son motores de corriente continua (CC), pero en lugar tener un
Programar posiciones en un Micro Servo Tower Pro SG90 9G (Recopilado de Internet. Revision Prof: Bolaños DJB) Versión: 12-04-18 Los servos son motores de corriente continua (CC), pero en lugar tener un
Bus I 2 C. Introducción
 Bus I 2 C Introducción 1980: Philips desarrolla el Bus de 2 alambres I 2 C para la comunicación de circuitos integrados. Se han otorgado licencias a mas de 50 compañías, encontrándonos con más de 1000
Bus I 2 C Introducción 1980: Philips desarrolla el Bus de 2 alambres I 2 C para la comunicación de circuitos integrados. Se han otorgado licencias a mas de 50 compañías, encontrándonos con más de 1000
Descripción del UNIVERSAL TRAINER La fuente de alimentación
 PRESENTACIÓN DEL MÓDULO: UNIVERSAL TRAINER Dpto. de electrónica La fuente de alimentación Es la encargada de generar, a partir de tensión de red y mediante el transformador (T1) las diferentes tensiones.
PRESENTACIÓN DEL MÓDULO: UNIVERSAL TRAINER Dpto. de electrónica La fuente de alimentación Es la encargada de generar, a partir de tensión de red y mediante el transformador (T1) las diferentes tensiones.
Proyecto: Telemando a través de la red eléctrica Autor: Antonio José Morente Martín Memoria Descriptiva Objeto
 1.1. Memoria Descriptiva 1.1.1. Objeto Telemando a través de la red eléctrica. El sistema de telemando se compone de dos equipos, uno de ellos es el emisor que cuenta con el interruptor para enviar la
1.1. Memoria Descriptiva 1.1.1. Objeto Telemando a través de la red eléctrica. El sistema de telemando se compone de dos equipos, uno de ellos es el emisor que cuenta con el interruptor para enviar la
I Seminario-Taller de Micro-Robots de Competición. Departamento de Ingeniería de Software y Sistemas Informáticos
 I Seminario-Taller de Micro-Robots de Competición Montaje Micro-Robot Sumobot Mini-Sumo de Parallax Departamento de Ingeniería de Software y Sistemas Informáticos Índice Kit Sumobot de Parallax. Material
I Seminario-Taller de Micro-Robots de Competición Montaje Micro-Robot Sumobot Mini-Sumo de Parallax Departamento de Ingeniería de Software y Sistemas Informáticos Índice Kit Sumobot de Parallax. Material
DOCUMENTACIÓN PARA LA FABRICACIÓN DE LA PLATAFORMA GUADALBOT. Placa Base I.E.S VIRGEN DE LAS NIEVES
 DOCUMENTACIÓN PARA LA FABRICACIÓN DE LA PLATAFORMA GUADALBOT I.E.S VIRGEN DE LAS NIEVES Placa Base Página 2. Descripción Página 8. Esquema eléctrico Página 9. Lista de materiales Página 10. Cara Top: Trazado
DOCUMENTACIÓN PARA LA FABRICACIÓN DE LA PLATAFORMA GUADALBOT I.E.S VIRGEN DE LAS NIEVES Placa Base Página 2. Descripción Página 8. Esquema eléctrico Página 9. Lista de materiales Página 10. Cara Top: Trazado
En el presente capítulo se hará mención de las conclusiones obtenidas de la realización del
 CAPÍTULO 6 Conclusiones En el presente capítulo se hará mención de las conclusiones obtenidas de la realización del proyecto, así como posibles modificaciones del sistema y trabajos futuros. En lo que
CAPÍTULO 6 Conclusiones En el presente capítulo se hará mención de las conclusiones obtenidas de la realización del proyecto, así como posibles modificaciones del sistema y trabajos futuros. En lo que
MANUAL DE DESCRIPCIÓN
 MANUAL DE DESCRIPCIÓN 1 ÍNDICE DE CONTENIDO 1. Alimentación.... 3 2. Comunicaciones digitales.... 5 3. Salidas de relés.... 7 4. Salidas digitales.... 9 6. Entradas analógicas.... 12 7. Varios.... 13 8.
MANUAL DE DESCRIPCIÓN 1 ÍNDICE DE CONTENIDO 1. Alimentación.... 3 2. Comunicaciones digitales.... 5 3. Salidas de relés.... 7 4. Salidas digitales.... 9 6. Entradas analógicas.... 12 7. Varios.... 13 8.
DEPARTAMENTO DE CIENCIAS DE LA ENERGIA Y MECANICA Laboratorio de Automatización Industrial Mecánica. TEMA: Adquisición de datos
 TEMA: Adquisición de datos Ejercicio: Recibir señales mediante el modulo NI USB 6009 Objetivo: Recibir señales analógicas y digitales mediante modulo NI USB 6009. Teoría: El modulo NI USB 6009, es un dispositivo
TEMA: Adquisición de datos Ejercicio: Recibir señales mediante el modulo NI USB 6009 Objetivo: Recibir señales analógicas y digitales mediante modulo NI USB 6009. Teoría: El modulo NI USB 6009, es un dispositivo
TEMA 5 ELECTRÓNICA TECNOLOGÍA 4º ESO. Samuel Escudero Melendo
 TEMA 5 ELECTRÓNICA TECNOLOGÍA 4º ESO Samuel Escudero Melendo QUÉ VEREMOS? CONCEPTOS BÁSICOS ELECTRICIDAD y ELECTRÓNICA CANTIDAD DE CARGA, INTENSIDAD, VOLTAJE, RESISTENCIA LEY DE OHM ELEMENTOS DE CIRCUITOS
TEMA 5 ELECTRÓNICA TECNOLOGÍA 4º ESO Samuel Escudero Melendo QUÉ VEREMOS? CONCEPTOS BÁSICOS ELECTRICIDAD y ELECTRÓNICA CANTIDAD DE CARGA, INTENSIDAD, VOLTAJE, RESISTENCIA LEY DE OHM ELEMENTOS DE CIRCUITOS
Unidad didáctica: "Electrónica Analógica"
 Unidad didáctica: "Electrónica Analógica" 1.- Introducción. 2.- La resistencia. 3.- El condensador. 4.- El diodo. 5.- El transistor. 1.- Introducción. La electrónica se encarga de controlar la circulación
Unidad didáctica: "Electrónica Analógica" 1.- Introducción. 2.- La resistencia. 3.- El condensador. 4.- El diodo. 5.- El transistor. 1.- Introducción. La electrónica se encarga de controlar la circulación
MICROCONTROLADOR PIC DE MICROCHIP
 MICROCONTROLADOR PIC DE MICROCHIP PIC16F877-28-PIN 8-BIT CMOS FLASH MICROCONTROLLER PIC16F877: ESTRUCTURA INTERNA Bus de Datos Bus de Datos (programa) Registro de trabajo (acumulador) Conversor A/D Contador/Temporizador
MICROCONTROLADOR PIC DE MICROCHIP PIC16F877-28-PIN 8-BIT CMOS FLASH MICROCONTROLLER PIC16F877: ESTRUCTURA INTERNA Bus de Datos Bus de Datos (programa) Registro de trabajo (acumulador) Conversor A/D Contador/Temporizador
Tarjeta Desarrollo dspic. Bogobots ITEM-CEM
 Tarjeta Desarrollo dspic Bogobots ITEM-CEM El micro dspic30f4013 El microcontrolador utilizado en la tarjeta es un dispositivo de procesamiento digital desarrollado por la compañía Microchip, el cual cumple
Tarjeta Desarrollo dspic Bogobots ITEM-CEM El micro dspic30f4013 El microcontrolador utilizado en la tarjeta es un dispositivo de procesamiento digital desarrollado por la compañía Microchip, el cual cumple
Modo de Operación del sigue líneas
 Modo de Operación del sigue líneas Un sigue líneas es como su nombre lo dice un autómata que es capaz de seguir el trazo de una línea dibujada sobre una superficie que puede ser blanca o negra según se
Modo de Operación del sigue líneas Un sigue líneas es como su nombre lo dice un autómata que es capaz de seguir el trazo de una línea dibujada sobre una superficie que puede ser blanca o negra según se
Practica 3: Ver el camino
 Pág.: 1 Practica 3: Ver el camino Diseño Práctica: Guillermo Carpintero del Barrio 3.1 - Objetivo El objetivo de esta práctica consiste en diseñar un sistema de visión sencillo que permita localizar una
Pág.: 1 Practica 3: Ver el camino Diseño Práctica: Guillermo Carpintero del Barrio 3.1 - Objetivo El objetivo de esta práctica consiste en diseñar un sistema de visión sencillo que permita localizar una
Qué es y por qué usarlo
 ARDUINO * El proyecto Arduino: Qué es y por qué usarlo Arduino es un sistema electrónico de prototipado abierto (opensource ) basada en hardware y software flexibles y fáciles de usar. Con conceptos básicos
ARDUINO * El proyecto Arduino: Qué es y por qué usarlo Arduino es un sistema electrónico de prototipado abierto (opensource ) basada en hardware y software flexibles y fáciles de usar. Con conceptos básicos
1. ESPECIFICACIONES 2. REGISTROS INTERNOS
 1. ESPECIFICACIONES La descripción general de la tarjeta FADIBUS sigue en paralelo a la descripción del circuito integrado PCA9555N. La tarjeta FADIBUS proporciona 16 entradas/salidas de propósito general
1. ESPECIFICACIONES La descripción general de la tarjeta FADIBUS sigue en paralelo a la descripción del circuito integrado PCA9555N. La tarjeta FADIBUS proporciona 16 entradas/salidas de propósito general
INTRODUCCIÓN A LA ELECTRÓNICA
 INTRODUCCIÓN A LA ELECTRÓNICA LA ELECTRICIDAD. CONCEPTOS BÁSICOS. Los átomos de lo materiales conductores tienen electrones en su capa externa que pueden saltar fácilmente de unos átomos a otros. Los electrones
INTRODUCCIÓN A LA ELECTRÓNICA LA ELECTRICIDAD. CONCEPTOS BÁSICOS. Los átomos de lo materiales conductores tienen electrones en su capa externa que pueden saltar fácilmente de unos átomos a otros. Los electrones
SISTEMA DE COMUNICACIÓN VÍA RADIO ENTRE PC Y MICROBOT.
 UNIVERSIDAD DE MÁLAGA. ESCUELA TÉCNICA SUPERIOR DE INGENIEROS DE TELECOMUNICACIÓN. PROYECTO FIN DE CARRERA: SISTEMA DE COMUNICACIÓN VÍA RADIO ENTRE PC Y MICROBOT. INGENIERÍA TÉCNICA EN TELECOMUNICACIÓN
UNIVERSIDAD DE MÁLAGA. ESCUELA TÉCNICA SUPERIOR DE INGENIEROS DE TELECOMUNICACIÓN. PROYECTO FIN DE CARRERA: SISTEMA DE COMUNICACIÓN VÍA RADIO ENTRE PC Y MICROBOT. INGENIERÍA TÉCNICA EN TELECOMUNICACIÓN
PLACA CONTROLADORA DE TEMPERATURA MEDIANTE SENSORES LM75
 PLACA CONTROLADORA DE TEMPERATURA MEDIANTE SENSORES LM75 Carlos Mestre Marta Garcés Marco Mª José Vaquer Beltrán B05 LSED DIE EPSA 2003-2004 1 Como fabricar una placa y no morir en el intento Materiales
PLACA CONTROLADORA DE TEMPERATURA MEDIANTE SENSORES LM75 Carlos Mestre Marta Garcés Marco Mª José Vaquer Beltrán B05 LSED DIE EPSA 2003-2004 1 Como fabricar una placa y no morir en el intento Materiales
 S320120 MAXSONAR EZ1 SENSOR DE DISTANCIAS POR ULTRASONIDOS Información técnica Sensor de distancias por ultrasonido de alto rendimiento MaxSonar-EZ1 A 0,785 19,9 mm F 0,519 12,6 mm B 0,870 21,1 mm G 0,124
S320120 MAXSONAR EZ1 SENSOR DE DISTANCIAS POR ULTRASONIDOS Información técnica Sensor de distancias por ultrasonido de alto rendimiento MaxSonar-EZ1 A 0,785 19,9 mm F 0,519 12,6 mm B 0,870 21,1 mm G 0,124
TPR 3ºESO. Departamento de Tecnología. IES Nuestra Señora de la Almudena Mª Jesús Saiz TEMA 6: ROBÓTICA
 TEMA 6: ROBÓTICA La robótica es la rama de la tecnología que se dedica al diseño y construcción de robots, Un robot es una máquina formada por sensores y actuadores controlados por un ordenador y programada
TEMA 6: ROBÓTICA La robótica es la rama de la tecnología que se dedica al diseño y construcción de robots, Un robot es una máquina formada por sensores y actuadores controlados por un ordenador y programada
Sensor Viento-Sol Radio Estándar
 TABLA DE CONTENIDO. Advertencias: 2 Reacción del sensor. 2 Descripción del producto. 3 Características técnicas. 3 Esquema de conexión. 4 Funcionamiento 5 Programación del sensor. 6 Añadir mando: 6 Añadir
TABLA DE CONTENIDO. Advertencias: 2 Reacción del sensor. 2 Descripción del producto. 3 Características técnicas. 3 Esquema de conexión. 4 Funcionamiento 5 Programación del sensor. 6 Añadir mando: 6 Añadir
TARJETA GIROSCOPIO, L3GD20. SIGMA ELECTRONICA
 TARJETA GIROSCOPIO, L3GD20. SIGMA ELECTRONICA 1. DESCRIPCION GENERAL: Imagen 1: Tarjeta L3GD20. 1 Giroscopio de tres ejes L3GD20, regulador de voltaje y circuito nivelador lógico, todo en una simple tarjeta
TARJETA GIROSCOPIO, L3GD20. SIGMA ELECTRONICA 1. DESCRIPCION GENERAL: Imagen 1: Tarjeta L3GD20. 1 Giroscopio de tres ejes L3GD20, regulador de voltaje y circuito nivelador lógico, todo en una simple tarjeta
10. Tarjeta analógica multipropósito
 10. Tarjeta analógica multipropósito 10.1. Características Esta tarjeta se ha diseñado con el fin de ofrecer una solución completa a aplicaciones donde se requieran entradas y salidas analógicas, donde
10. Tarjeta analógica multipropósito 10.1. Características Esta tarjeta se ha diseñado con el fin de ofrecer una solución completa a aplicaciones donde se requieran entradas y salidas analógicas, donde
CYBERTECH 2018 TALLER 03: MOTORES Y POTENCIA
 CYBERTECH 2018 TALLER 03: MOTORES Y POTENCIA MATERIALES Arduino Motor Shield LDR Pulsador Pila 9V Motor DC Resistencias Cables MOTORES DC La velocidad de giro depende de la tensión Necesitan una reductora
CYBERTECH 2018 TALLER 03: MOTORES Y POTENCIA MATERIALES Arduino Motor Shield LDR Pulsador Pila 9V Motor DC Resistencias Cables MOTORES DC La velocidad de giro depende de la tensión Necesitan una reductora
Normas Europeas de Modelismo. Módulo de control. para señales. Recomendación Edición 2012 (Sustituye la edición 2011)
") Normas Europeas de Modelismo Módulo de control para señales NEM 692 Página 1 de 6 Recomendación Edición 2012 (Sustituye la edición 2011) 1. Función del módulo de control El módulo de control define, para
Normas Europeas de Modelismo Módulo de control para señales NEM 692 Página 1 de 6 Recomendación Edición 2012 (Sustituye la edición 2011) 1. Función del módulo de control El módulo de control define, para
Amplificador de 80w (4x20w) para automóvil
 para automóvil") Amplificador de 80w (4x20w) para automóvil Diagrama eléctrico de una de las 4 etapas. Vcc 2v F 00K 0 F 0.0 F 9 3 Entrada 0.47 F 470 F /2-0 00 F 0. F 2 220 F 0.22 F 5 /2-6 7 00 F 8 220 F 4 220 F 0. F 4
Amplificador de 80w (4x20w) para automóvil Diagrama eléctrico de una de las 4 etapas. Vcc 2v F 00K 0 F 0.0 F 9 3 Entrada 0.47 F 470 F /2-0 00 F 0. F 2 220 F 0.22 F 5 /2-6 7 00 F 8 220 F 4 220 F 0. F 4
En este proyecto se ha desarrollado un maestro y un esclavo TIPO 5. Ambos han sido desarrollados con el software EAGLE.
 5. Hardware En este proyecto se ha desarrollado un maestro y un esclavo TIPO 5. Ambos han sido desarrollados con el software EAGLE. 5.1 Maestro. El maestro dispone de los siguientes elementos: Microcontrolador
5. Hardware En este proyecto se ha desarrollado un maestro y un esclavo TIPO 5. Ambos han sido desarrollados con el software EAGLE. 5.1 Maestro. El maestro dispone de los siguientes elementos: Microcontrolador
UNIVERSIDAD DE OVIEDO
 UNIVERSI E OVIEO 1 Características generales en el PIC16F877 Ocho canales de conversión. Cinco pines E/S de PORT y los tres de PORTE. Convierte la señal analógica en un número digital de 10 bits. Tensión
UNIVERSI E OVIEO 1 Características generales en el PIC16F877 Ocho canales de conversión. Cinco pines E/S de PORT y los tres de PORTE. Convierte la señal analógica en un número digital de 10 bits. Tensión
Circuito de Offset
 Figura 3.3 Conexión del Amplificador Los cálculos para la ganancia son simples y se muestran en la ecuación (3.), en estas se puede observar que para el cálculo de la ganancia es necesario establecer el
Figura 3.3 Conexión del Amplificador Los cálculos para la ganancia son simples y se muestran en la ecuación (3.), en estas se puede observar que para el cálculo de la ganancia es necesario establecer el
OPENCOCKPITS IOCard USBRELAYS MANUAL DE INSTALACION Y USO
 OPENCOCKPITS IOCard USBRELAYS MANUAL DE INSTALACION Y USO INTRODUCCION La tarjeta USBRelays se ha diseñado para poder gestionar hasta 7 relés de potencia. Asimismo tenemos en ella 5 entradas analógicas,
OPENCOCKPITS IOCard USBRELAYS MANUAL DE INSTALACION Y USO INTRODUCCION La tarjeta USBRelays se ha diseñado para poder gestionar hasta 7 relés de potencia. Asimismo tenemos en ella 5 entradas analógicas,
Departamento de Ingeniería a de Software y Sistemas Informáticos
 II Seminario-Taller de Micro-Robots de Competición Montaje Micro-Robot Bigoton - Laberinto Departamento de Ingeniería a de Software y Sistemas Informáticos Índice Kit Sumobot de Parallax. Material necesario
II Seminario-Taller de Micro-Robots de Competición Montaje Micro-Robot Bigoton - Laberinto Departamento de Ingeniería a de Software y Sistemas Informáticos Índice Kit Sumobot de Parallax. Material necesario
Fuente de Alimentación Simétrica Regulada y Variable. (0 a 30V 2A)
") Fuente de Alimentación Simétrica Regulada y Variable (0 a 30V 2A) Hoy en día los equipos electrónicos, en su mayoría, funcionan con corriente continua, así, el dispositivo que convierte la corriente alterna
Fuente de Alimentación Simétrica Regulada y Variable (0 a 30V 2A) Hoy en día los equipos electrónicos, en su mayoría, funcionan con corriente continua, así, el dispositivo que convierte la corriente alterna
TEMA 2: LOS CIRCUITOS ELÉCTRICOS
 TEMA 2: LOS CIRCUITOS ELÉCTRICOS T E C N O L O G Í A - 3 º E S O LA ELECTRICIDAD QUÉ ES LA ELECTRICIDAD? CORRIENTE ELÉCTRICA La corriente eléctrica es el desplazamiento de los electrones por el interior
TEMA 2: LOS CIRCUITOS ELÉCTRICOS T E C N O L O G Í A - 3 º E S O LA ELECTRICIDAD QUÉ ES LA ELECTRICIDAD? CORRIENTE ELÉCTRICA La corriente eléctrica es el desplazamiento de los electrones por el interior
Anexo VI: Detalles y consideraciones prácticas en el diseño de placas de circuito impreso
 Anexo VI: Detalles y consideraciones prácticas en el diseño de placas de circuito impreso 1. Introducción En la actualidad, el uso de placas de circuito impreso es, de lejos, el método más común y usado
Anexo VI: Detalles y consideraciones prácticas en el diseño de placas de circuito impreso 1. Introducción En la actualidad, el uso de placas de circuito impreso es, de lejos, el método más común y usado
Grado de Óptica y Optometría Asignatura: FÍSICA Curso: Práctica nº 5. MEDIDAS DE RESISTENCIAS, VOLTAJES Y CORRIENTES: MULTÍMETRO
 FCULTD DE CIENCIS UNIERSIDD DE LICNTE Grado de Óptica y Optometría signatura: FÍSIC Curso: 200- Práctica nº 5. MEDIDS DE RESISTENCIS, OLTJES Y CORRIENTES: MULTÍMETRO Material Fuente de alimentación de
FCULTD DE CIENCIS UNIERSIDD DE LICNTE Grado de Óptica y Optometría signatura: FÍSIC Curso: 200- Práctica nº 5. MEDIDS DE RESISTENCIS, OLTJES Y CORRIENTES: MULTÍMETRO Material Fuente de alimentación de
PRÁCTICAS ELECTRÓNICA ANALÓGICA
 TECNOLOGÍA PRÁCTICAS NIVEL: 4ºESO ELECTRÓNICA ANALÓGICA 1 LISTA DE MATERIALES... 2 2 CARACTERÍSTICAS DE ALGUNOS COMPONENTES... 3 2.1 RELÉS... 3 2.2 TRANSISTORES... 3 2.3 CIRCUITOS INTEGRADOS... 3 3 PLACA
TECNOLOGÍA PRÁCTICAS NIVEL: 4ºESO ELECTRÓNICA ANALÓGICA 1 LISTA DE MATERIALES... 2 2 CARACTERÍSTICAS DE ALGUNOS COMPONENTES... 3 2.1 RELÉS... 3 2.2 TRANSISTORES... 3 2.3 CIRCUITOS INTEGRADOS... 3 3 PLACA