Tarjeta Desarrollo dspic. Bogobots ITEM-CEM
|
|
|
- Lidia Maidana Campos
- hace 7 años
- Vistas:
Transcripción
1 Tarjeta Desarrollo dspic Bogobots ITEM-CEM
2 El micro dspic30f4013 El microcontrolador utilizado en la tarjeta es un dispositivo de procesamiento digital desarrollado por la compañía Microchip, el cual cumple la función de ser el controlador principal del robot. Se encarga desde el control de los servomotores hasta la lectura de los diversos sensores y la toma de decisiones del jugador.
3 El micro dspic30f4013 Cuenta con: Entradas convertidoras analógico-digitales de 12 bit. PWM s Timmers 2 UART (Receptor/Transmisor Universal Asíncrono) utilizados para la comunicación serial Multiples entradas y salidas digitales.
4 Diagrama de pines del micro Este es el tipo de empaquetado utilizado en tarjeta desarrollo para el Bogobot. Este microcontrolador consta de 40 pines, los cuales se encuentran numerados a partir de la muesca de una de las esquinas del circuito hacia su lado derecho dando la vuelta al circuito.


5 Empaquetado pdip

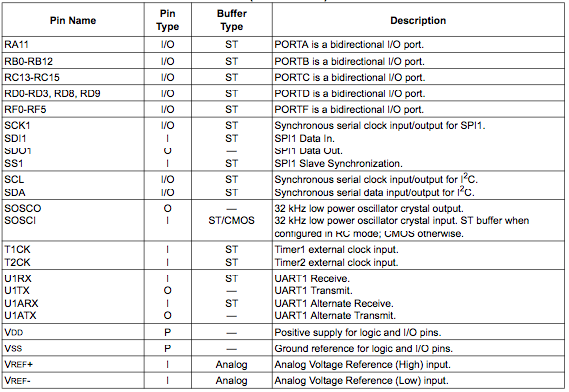
6 Tabla de asignación de pines.
7 Tabla de asignación de pines.
8
9 Oscilador El microcontrolador tiene un timmer interno que para funcionar correctamente es necesario que se conecte a un oscilador. El oscilador utilizado en esta ocasión es de 12,000MHz. Oscilador grande. Los pines de este oscilador se conectan a capacitores de 22 microfaradios para estabilizar la frecuencia del mismo, no obastante para aplicaciones sencillas no es absolutamente necesario.

10 Master Clear MCLR. Este pin es utilizado para resetear al microcontrolador, esto quiere decir que sin importar que se encuentre haciendo, al momento de aterrizar este puerto (puede hacer con un botón conectado a tierra) el micro vuelve a la primer tarea para la cual está programado. Este pin también se utiliza por el programador cuando se carga o lee el programa del micro.
11 Tarjeta desarrollo dspic La tarjeta desarrollada para implementar el microcontrolador en el robot está diseñada para poder montar un micro QFN (Quad Flatpackage No- Leadframes) de dimensiones menores al utilizado por los alumnos en una protoboard y contar con las diferentes regulaciones de voltaje necesarias para su correcto funcionamiento, así como una serie de conectores fáciles de usar y una base lista para montarse. QFN
12 Tarjeta desarrollo dspic Esta tarjeta cuenta también con un regulador de voltaje conmutado de Texas Instruments, otros dos secundarios de disipación de calor, un convertidor de señales rs232- ttl y un juego de LEDs y botones para su operación.
13 Tarjeta desarrollo dspic El dispositivo 1: Es un switch de encendido. Este switch es usado solamente para desarrollo y debe permanecer encendido. Este interrumpe el habilitador de las fuentes de 5 y 3 volts por lo cual apaga el Dspic y al Max233. El dispositivo 2: Es un regulador de 3.3 volts conectado únicamente a 3 pines Varios de los postes del DSP se encuentran extendidos a postes inferiores. Esto permite la conexión con dispositivos externos tales como módulos inerciales, dispositivos digitales, entre otros.
14 Tarjeta desarrollo dspic El dispositivo 3 es el regulador de 5 volts a 1 amperio. Este dispositivo alimenta al microcontrolador y se ofrecen dos salidas a esta tensión. El dispositivo 4 es el DsPic, el cual es un procesador de señales digitales modelo DsPic 40f13 conectado para ejecutar hasta 25 Mips (million instruction per second). El dispositivo 5 es un convertidor de señales ttl a rs232 y así, poder comunicar con computadora.
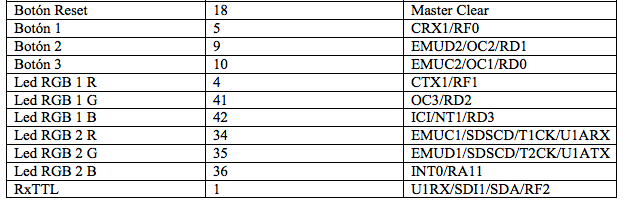
15 Tarjeta desarrollo dspic El dispositivo 1: Es el regulador de voltaje conmutado El dispositivo 2: Es el botón de reset del DSP Englobado con el número 3 están los leds RGB. Los botones y LEDs están conectados directamente a los i/o del dspic.
16 dspic Engolbado con el número 4 se encuentran los botones de estado. Englobado con el número 5 se encuentran los últimos tres leds de montaje superficial. Tienen colores diferentes: rojo, verde y azul de izquierda a derecha. Sus entradas están ruteadas a los tres postes debajo de ellos.


17 Fuente conmutada PT6304 El circuito cuenta con un regulador de voltaje conmutado capaz de ahorrar energía conviertiendola en un campo magnético generado por un solenoide el cual es reutilizado integrandolo en el circuito de alimentación a diferencia de los reguladores que disipan el sobrante de voltaje en forma de calor. Este regulador es capaz de proporcionar hasta 3 A de forma continua y 5 A pico. La fuente utilizada es la PT6304 de Texas Instruments y cuenta con un sistema de protección de corto circuito.
18 Uso de los pines de la tarjeta. 1: Entrada de energía. En estos pines se conecta un voltaje de 7 a 13 voltios, generalmente proveniente de una batería. Los postes 2 son los postes de programación en donde se conecta el programador de Dspic. En la tarjeta se puede observar una flecha que debe de coincidir con una flecha similar en el programador.
19 Uso de los pines de la tarjeta. Los postes 3 están directamente ruteados a las entradas analógicas del dspic. Los postes 4 son entradas o salidas digitales. Los postes 5 son los de comunicación. Todos los postes en la tarjeta tienen un paso de 10 postes/pulgada.
20 Comunicación. El módulo de comunicación de la tarjeta es configurable por el micro, la tasa de transferencia utilizada por el equipo es de bps (En la tarjeta controladora de servos es necesario poner los puentes necesarios para ajustarla a este baud rate ). En la tarjeta se tienen dos columnas de tres filas (tx, rx y tierra respectivamente), estos puertos UART utilizan el protocolo de comunicación TTL de lado izquierdo y RS232 de lado derecho.
21 Comunicación. El protocolo ttl se utiliza para comunicación con dispositivos electrónicos dentro del robot tales como controlador de servos y cámara de video. Los puertos RS232 se utilizan para comunicación bidireccional con una PC.
22 Conexión con dispositivos externos.
23 Conexión con dispositivos externos.

24 Conexión con dispositivos externos.
25 Conexión con dispositivos externos. Los pines de expansión con dispositivos están conectados directamente al DSP y su función es conectar al DSP con los dispositivos externos como IMUS, Brújula, etc.
26 Salidas de voltaje Los pines de la sección número 6 son salidas de voltaje a distintos voltajes como se puede ver en la tabla. Estos diferentes voltajes son utilizados para alimentar los distintos dispositivos externos como los acelerómetros, giroscopios etc.
27 Posición de la tarjeta desarrollo dspic en el Bogobot.
28 Componentes Básicos para el Taller -Microcontrolador dspic30f4013 en presentación pdip. -Un oscilador de 12Mhz -Dos capacitores de 2.2 MicroFaradios -1 Resistencia de 1K -1 Resistencia de 10K -4 Resistencias de Push Button -Cable
29 Implementación del dspic PDIP a un circuito.

30 Comprar el dspic por Internet WebSite: #2
31 Pic Kit
32 MikroC for dspic 30/33 Este software puede ser descargado desde su página principal como versión de DEMO. Esta versión es suficiente para realizar varios programas básicos. No obstante para programar de forma completa programas como el de Jugador de los Bogobots es necesario comprar la licencia. WebSite: 414/mikroc-for-dspic30-33-and-pic24/
33 Mikro C for dspic 30/33 User Manual URL:
34 Fuentes y recursos en internet. Estas fuentes aun no tienen el formato adecuado. Tutorial para hacer circuitos impresos: Datasheet dspic 30f4013 Microchip: Datasheet PT6304: 4.shtml Documento Bogobot, Ing. Guillermo Villarral, Ing. Salvador Sumohano, Ing. Erick Cruz, Dr. Alejandro Aceves.
El objeto de este proyecto es el de construir un robot araña controlado por un PIC16F84A.
 .. Memoria Descriptiva... Objeto El objeto de este proyecto es el de construir un robot araña controlado por un PIC6F8A.... Antecedentes El diseño original no se llegó a realizar en circuito impreso, en
.. Memoria Descriptiva... Objeto El objeto de este proyecto es el de construir un robot araña controlado por un PIC6F8A.... Antecedentes El diseño original no se llegó a realizar en circuito impreso, en
COMUNICACIÓN SERIE (RS232)
") COMUNICACIÓN SERIE (RS232) Introducción Una manera de conectara dos dipositivos es mediante comunicaciones serie asíncronas. En ellas los bits de datos se transmiten "en serie" (uno de trás de otro) y
COMUNICACIÓN SERIE (RS232) Introducción Una manera de conectara dos dipositivos es mediante comunicaciones serie asíncronas. En ellas los bits de datos se transmiten "en serie" (uno de trás de otro) y
GUÍA RÁPIDA DE CONEXIÓN DEL F9.
 GUÍA RÁPIDA DE CONEXIÓN DEL F9. El presente documento le ayudará a realizar las conexiones necesarias para el correcto funcionamiento del dispositivo F9. IDENTIFICACIÓN DEL EQUIPO. 1.- En su parte frontal
GUÍA RÁPIDA DE CONEXIÓN DEL F9. El presente documento le ayudará a realizar las conexiones necesarias para el correcto funcionamiento del dispositivo F9. IDENTIFICACIÓN DEL EQUIPO. 1.- En su parte frontal
INTRODUCCIÓN DESCRIPCIÓN... 4 Características Hardware... 4
 TARJETA ULN2003 TABLA DE CONTENIDO INTRODUCCIÓN... 3 DESCRIPCIÓN... 4 Características Hardware... 4 ETAPAS Y CARACTERISTICAS ESPECÍFICAS... 5 1. Entrada de voltaje... 5 2. Señales de entrada... 5 3. Salida
TARJETA ULN2003 TABLA DE CONTENIDO INTRODUCCIÓN... 3 DESCRIPCIÓN... 4 Características Hardware... 4 ETAPAS Y CARACTERISTICAS ESPECÍFICAS... 5 1. Entrada de voltaje... 5 2. Señales de entrada... 5 3. Salida
Guía de ensamble del PICkit 2. UNIVERSIDAD PONTIFICIA BOLIVARIANA
 Guía de ensamble del PICkit 2. UNIVERSIDAD PONTIFICIA BOLIVARIANA Manuel Alexander Vega Uribe 2011 INTRODUCCIÓN Antes de empezar a explicar el proceso de ensamble del PICkit 2, se le agradece al estudiante
Guía de ensamble del PICkit 2. UNIVERSIDAD PONTIFICIA BOLIVARIANA Manuel Alexander Vega Uribe 2011 INTRODUCCIÓN Antes de empezar a explicar el proceso de ensamble del PICkit 2, se le agradece al estudiante
Hoja de Datos NoMADA Advance [DAT001A NoMADA Advance 02/16]
![Hoja de Datos NoMADA Advance [DAT001A NoMADA Advance 02/16]](/thumbs/49/25558123.jpg "Hoja de Datos NoMADA Advance [DAT001A NoMADA Advance 02/16]") Hoja de datos Advance Hoja de Datos Advance [DAT001A Advance 02/16] Especificaciones Técnicas de la Tarjeta NoMADA Advance Diseñado por: Diseño Embebido un Paso Adelante. DAT 001A Advance - 02/2016 Hoja
Hoja de datos Advance Hoja de Datos Advance [DAT001A Advance 02/16] Especificaciones Técnicas de la Tarjeta NoMADA Advance Diseñado por: Diseño Embebido un Paso Adelante. DAT 001A Advance - 02/2016 Hoja
Guía de Usuario Programador USB
 Guía de Usuario Programador USB Tecnología Digital del Bajío Av. Vicente Guerrero 1003, Int. A Irapuato, Gto. Mex. C.P. 36690 Teléfono: (462) 145 35 22 www.tecdigitaldelbajio.com i Guía de Usuario, Programador
Guía de Usuario Programador USB Tecnología Digital del Bajío Av. Vicente Guerrero 1003, Int. A Irapuato, Gto. Mex. C.P. 36690 Teléfono: (462) 145 35 22 www.tecdigitaldelbajio.com i Guía de Usuario, Programador
1.1 Introducción y definición de un microcontrolador 1.2 Estructura básica de un microcontrolador 1.3 Características de la Arquitectura
 Índice 1.1 Introducción y definición de un microcontrolador 1.2 Estructura básica de un microcontrolador 1.3 Características de la Arquitectura 1.3.1 Arquitectura RISC 1.3.2 Arquitectura Harvard 1.3.3
Índice 1.1 Introducción y definición de un microcontrolador 1.2 Estructura básica de un microcontrolador 1.3 Características de la Arquitectura 1.3.1 Arquitectura RISC 1.3.2 Arquitectura Harvard 1.3.3
Investigación y Desarrollos en Open Hardware
 Investigación y Desarrollos en Open fabioe@dynamoelectronics.com www.dynamoelectronics.com Investigación y desarrollo hardware y software 1. Por que hacer desarrollos con software y hardware? 2. Que opciones
Investigación y Desarrollos en Open fabioe@dynamoelectronics.com www.dynamoelectronics.com Investigación y desarrollo hardware y software 1. Por que hacer desarrollos con software y hardware? 2. Que opciones
Manual del software de control para la tarjeta de 8 relevadores ICSE014A (Windows 7)
") 1 Manual del software de control para la tarjeta de 8 relevadores ICSE014A (Windows 7) *La tarjeta y el software fueron desarrollados por www.icstation.com 1. Baje del siguiente link de internet la carpeta
1 Manual del software de control para la tarjeta de 8 relevadores ICSE014A (Windows 7) *La tarjeta y el software fueron desarrollados por www.icstation.com 1. Baje del siguiente link de internet la carpeta
PIC-Ready1. Placa adicional. Manual de usuario. MikroElektronika
 PIC-Ready1 Manual de usuario Todos los sistemas de desarrollo de Mikroelektronika disponen de un gran número de módulos periféricos, ampliando el rango de aplicaciones de los microcontroladores y facilitando
PIC-Ready1 Manual de usuario Todos los sistemas de desarrollo de Mikroelektronika disponen de un gran número de módulos periféricos, ampliando el rango de aplicaciones de los microcontroladores y facilitando
V 1.0. Ing. Juan C. Guarnizo B.
 V 1.0 Ing. Juan C. Guarnizo B. INTRODUCCIÓN... 3 Microcontroladores soportados... 3 DESCRIPCIÓN... 4 1. Entrada de voltaje USB... 4 2. Regulador a 3.3V... 5 3. Pines de control... 5 4. Pines de salida...
V 1.0 Ing. Juan C. Guarnizo B. INTRODUCCIÓN... 3 Microcontroladores soportados... 3 DESCRIPCIÓN... 4 1. Entrada de voltaje USB... 4 2. Regulador a 3.3V... 5 3. Pines de control... 5 4. Pines de salida...
Curso de Automatización y Robótica Aplicada con Arduino
 Temario Curso de Automatización y Robótica Aplicada con Arduino Módulo 1. Programación en Arduino. Temario. Curso. Automatización y Robótica Aplicada con Arduino. Módulo 1. Programación en Arduino. Duración
Temario Curso de Automatización y Robótica Aplicada con Arduino Módulo 1. Programación en Arduino. Temario. Curso. Automatización y Robótica Aplicada con Arduino. Módulo 1. Programación en Arduino. Duración
Especificaciones técnicas de los prototipos:
 Especificaciones técnicas de los prototipos: Sensor de Temperatura y Humedad Relativa Sensor de Humedad de la Hoja CARACTERÍSTICAS SENSOR HUMEDAD DE LA HOJA El Sensor de Humedad de la hoja está diseñado
Especificaciones técnicas de los prototipos: Sensor de Temperatura y Humedad Relativa Sensor de Humedad de la Hoja CARACTERÍSTICAS SENSOR HUMEDAD DE LA HOJA El Sensor de Humedad de la hoja está diseñado
MON AMI MATRIZ DE LEDS 7X30 Manual del Usuario
 1 MON AMI MATRIZ DE LEDS 7X30 Manual del Usuario 2 MON AMI MATRIZ DE LEDS 7X30 Manual del Usuario Indice : 1. Introducción 2 2. Características principales 3 3. Software MON AMI v2.0.exe y Tiny 3 4. Puesta
1 MON AMI MATRIZ DE LEDS 7X30 Manual del Usuario 2 MON AMI MATRIZ DE LEDS 7X30 Manual del Usuario Indice : 1. Introducción 2 2. Características principales 3 3. Software MON AMI v2.0.exe y Tiny 3 4. Puesta
VOCABULARIO DEL HARDWARE. Docente Yeni Ávila
 VOCABULARIO DEL HARDWARE Docente Yeni Ávila HARDWARE El Hardware Básico: son las piezas fundamentales e imprescindibles para que la computadora funcione como son: Placa base, monitor, teclado y ratón.
VOCABULARIO DEL HARDWARE Docente Yeni Ávila HARDWARE El Hardware Básico: son las piezas fundamentales e imprescindibles para que la computadora funcione como son: Placa base, monitor, teclado y ratón.
EQUIPO T2000 GPRS/SMS
 EQUIPO T2000 GPRS/SMS Descripción El T2000 GPRS/SMS es un equipo destinado al seguimiento y control de todo tipo de vehículos. Cuenta con un motor de reglas configurables por el usuario lo que le brinda
EQUIPO T2000 GPRS/SMS Descripción El T2000 GPRS/SMS es un equipo destinado al seguimiento y control de todo tipo de vehículos. Cuenta con un motor de reglas configurables por el usuario lo que le brinda
SIMULACION DE UN ENTORNO Y MEMORIA VIRTUAL PARA UNA PLATAFORMA KHEPERA. Leonardo Solaque Nelson D. Muñoz Nelson Londoño Ospina
 SIMULACION DE UN ENTORNO Y MEMORIA VIRTUAL PARA UNA PLATAFORMA KHEPERA Leonardo Solaque Nelson D. Muñoz Nelson Londoño Ospina GIRA 2 (Grupo de Investigación en Robótica y Areas Afines) Universidad de Antioquia
SIMULACION DE UN ENTORNO Y MEMORIA VIRTUAL PARA UNA PLATAFORMA KHEPERA Leonardo Solaque Nelson D. Muñoz Nelson Londoño Ospina GIRA 2 (Grupo de Investigación en Robótica y Areas Afines) Universidad de Antioquia
Desarrollo de una interfaz RS-232 para el manejo de un coche de radiocontrol desde el PC
 Desarrollo de una interfaz RS-232 para el manejo de un coche de radiocontrol desde el PC A. Muñoz, A. Millan, P. Ruiz-de-Clavijo, J. Viejo, E. Ostua, D. Guerrero Grupo ID2 (Investigación y Desarrollo Digital).
Desarrollo de una interfaz RS-232 para el manejo de un coche de radiocontrol desde el PC A. Muñoz, A. Millan, P. Ruiz-de-Clavijo, J. Viejo, E. Ostua, D. Guerrero Grupo ID2 (Investigación y Desarrollo Digital).
Trabajo 3. PROTOCOLOS DE COMUNICACIÓN SERIAL INDUSTRIALES Edwin Gilberto Carreño Lozano, Código: 2090454.
 Trabajo 3. PROTOCOLOS DE COMUNICACIÓN SERIAL INDUSTRIALES Edwin Gilberto Carreño Lozano, Código: 2090454. I. OBJETIVO Hacer un resumen acerca de los protocolos RS232, RS485, RS422 y HART; protocolos de
Trabajo 3. PROTOCOLOS DE COMUNICACIÓN SERIAL INDUSTRIALES Edwin Gilberto Carreño Lozano, Código: 2090454. I. OBJETIVO Hacer un resumen acerca de los protocolos RS232, RS485, RS422 y HART; protocolos de
CONEXIÓN DIRECTA DE MÚLTIPLES SENSORES A MICROCONTROLADORES SIN UTILIZAR CONVERTIDOR ANALÓGICO DIGITAL
 CONEXIÓN DIRECTA DE MÚLTIPLES SENSORES A MICROCONTROLADORES SIN UTILIZAR CONVERTIDOR ANALÓGICO DIGITAL Custodio Ruiz, Ángel Augusto Torres, Rafael UNEXPO, Centro Instrumentación y Control cicunexpo@gmail.com
CONEXIÓN DIRECTA DE MÚLTIPLES SENSORES A MICROCONTROLADORES SIN UTILIZAR CONVERTIDOR ANALÓGICO DIGITAL Custodio Ruiz, Ángel Augusto Torres, Rafael UNEXPO, Centro Instrumentación y Control cicunexpo@gmail.com
COMPONENTES PRINCIPALES DEL HARDWARE DE UN ORDENADOR:
 COMPONENTES PRINCIPALES DEL HARDWARE DE UN ORDENADOR: 1. La fuente de alimentación Los ordenadores, como todos los aparatos electrónicos (teléfonos móviles, cámaras digitales, videoconsolas, etc.) funcionan
COMPONENTES PRINCIPALES DEL HARDWARE DE UN ORDENADOR: 1. La fuente de alimentación Los ordenadores, como todos los aparatos electrónicos (teléfonos móviles, cámaras digitales, videoconsolas, etc.) funcionan
PRÁCTICA 4 LOS BITS DE CONFIGURACIÓN DEL PIC16F628
 Los Bits de Configuración del PIC16F628 44 PRÁCTICA 4 LOS BITS DE CONFIGURACIÓN DEL PIC16F628 OBJETIVOS Identificar cada uno de los bits de configuración que rigen el funcionamiento del PIC16F628. Verificar
Los Bits de Configuración del PIC16F628 44 PRÁCTICA 4 LOS BITS DE CONFIGURACIÓN DEL PIC16F628 OBJETIVOS Identificar cada uno de los bits de configuración que rigen el funcionamiento del PIC16F628. Verificar
Placa de control MCC03
 Placa de control MCC03 Placa de control MCC03 La placa de control basada en el micro controlador PIC 16F874A de Microchip, es la encargada del procesar los datos que se introducen en el sistema y actuar
Placa de control MCC03 Placa de control MCC03 La placa de control basada en el micro controlador PIC 16F874A de Microchip, es la encargada del procesar los datos que se introducen en el sistema y actuar
podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que el
 CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
CAPÍTULO 4 Funcionamiento del Robot Después de analizar paso a paso el diseño y funcionamiento de la interfase, nos podemos enfocar al funcionamiento del robot, es decir la parte de electrónica. Para que
HARDWARE USB/RS232 (28 servos)
") HARDWARE USB/RS232 (28 servos) MANUAL DE MONTAJE Diseño de: J.V.M INDICE 1- MONTAJE DEL HARDWARE.. PAG 2 LISTA DE MATERIALES INSTRUCCIONES PARA EL MONTAJE PINEADO DEL MICROCONTROLADOR 2- ESQUEMA ELECTRONICO
HARDWARE USB/RS232 (28 servos) MANUAL DE MONTAJE Diseño de: J.V.M INDICE 1- MONTAJE DEL HARDWARE.. PAG 2 LISTA DE MATERIALES INSTRUCCIONES PARA EL MONTAJE PINEADO DEL MICROCONTROLADOR 2- ESQUEMA ELECTRONICO
INFORME DE MONTAJE Y PRUEBAS DEL CIRCUITO ELECTRÓNICO PARA ADQUIRIR LOS POTENCIALES EVOCADOS AUDITIVOS
 INFORME DE MONTAJE Y PRUEBAS DEL CIRCUITO ELECTRÓNICO PARA ADQUIRIR LOS POTENCIALES EVOCADOS AUDITIVOS ACTIVIDADES: A02-2: Diseño de los circuitos electrónicos A02-3: Montaje y pruebas en protoboard de
INFORME DE MONTAJE Y PRUEBAS DEL CIRCUITO ELECTRÓNICO PARA ADQUIRIR LOS POTENCIALES EVOCADOS AUDITIVOS ACTIVIDADES: A02-2: Diseño de los circuitos electrónicos A02-3: Montaje y pruebas en protoboard de
COMPUTADORAS DIGITALES
 COMPUTADORAS DIGITALES A. OBJETIVOS 1. Familiarizar al estudiante con la arquitectura de computadoras de 8bits. 2. Familiarizar al estudiante con el diseño, construcción y programación de los microcontroladores
COMPUTADORAS DIGITALES A. OBJETIVOS 1. Familiarizar al estudiante con la arquitectura de computadoras de 8bits. 2. Familiarizar al estudiante con el diseño, construcción y programación de los microcontroladores
Profesor : Iván Mechan Zapata Alumna: Miriam vallejos Cavero Año: IV ciclo 27/11 /2012
 Profesor : Iván Mechan Zapata Alumna: Miriam vallejos Cavero Año: IV ciclo 27/11 /2012 PLACA MADRE La placa madre es el esqueleto de nuestro ordenador. En sus ranuras van fijados todos los demás componentes,
Profesor : Iván Mechan Zapata Alumna: Miriam vallejos Cavero Año: IV ciclo 27/11 /2012 PLACA MADRE La placa madre es el esqueleto de nuestro ordenador. En sus ranuras van fijados todos los demás componentes,
Alternativas de Solución. Proyecto de Titulación. Integración de un Densímetro Nuclear a una Red de Instrumentación
 UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA DEPARTAMENTO DE ELECTRÓNICA Alternativas de Solución Proyecto de Titulación Integración de un Densímetro Nuclear a una Red de Instrumentación Presentado por: Rodrigo
UNIVERSIDAD TÉCNICA FEDERICO SANTA MARÍA DEPARTAMENTO DE ELECTRÓNICA Alternativas de Solución Proyecto de Titulación Integración de un Densímetro Nuclear a una Red de Instrumentación Presentado por: Rodrigo
1-Introducción. KIT ARM- Ténicas Digitales II - Ing. Ruben M. Lozano /9
 1-Introducción -Este apunte pretende ser una guía para aquellos alumnos que se inician en la programación de microntroladores con arquitectura ARM, utilizando como plataforma de hardware el kit de desarrollo
1-Introducción -Este apunte pretende ser una guía para aquellos alumnos que se inician en la programación de microntroladores con arquitectura ARM, utilizando como plataforma de hardware el kit de desarrollo
Manual de Usuario de Tarjetas Controladoras DMX. Caracteristicas de Hardware:
 Manual de Usuario de Tarjetas Controladoras DMX Caracteristicas de Hardware: Hasta 16 millones de colores por pixel Compatible con protocolo DMX-512A Salida RGB linealizada para mejorar nitidez Voltaje
Manual de Usuario de Tarjetas Controladoras DMX Caracteristicas de Hardware: Hasta 16 millones de colores por pixel Compatible con protocolo DMX-512A Salida RGB linealizada para mejorar nitidez Voltaje
1. Qué es un automatismo?
 1. Qué es un automatismo? - En electricidad se denomina automatismo al circuito que es capaz de realizar secuencias lógicas sin la intervención del hombre. - Se utilizan tanto en el sector industrial como
1. Qué es un automatismo? - En electricidad se denomina automatismo al circuito que es capaz de realizar secuencias lógicas sin la intervención del hombre. - Se utilizan tanto en el sector industrial como
ELECTRONICA ESTUDIO MODULO TRASMISOR-RECEPTOR DE RF A RS232 BIDIRECCIONAL Clave: 875
 ELECTRONICA ESTUDIO MODULO TRASMISOR-RECEPTOR DE RF A RS232 BIDIRECCIONAL Clave: 875 www.electronicaestudio.com Guía de Operación E L E C T R O N I C A E S T U D I O Modulo Transmisor-Receptor de RF a
ELECTRONICA ESTUDIO MODULO TRASMISOR-RECEPTOR DE RF A RS232 BIDIRECCIONAL Clave: 875 www.electronicaestudio.com Guía de Operación E L E C T R O N I C A E S T U D I O Modulo Transmisor-Receptor de RF a
TARJETA M95 L80 ARDUINO
 TARJETA M95 L80 ARDUINO TABLA DE CONTENIDO INTRODUCCIÓN... 3 DESCRIPCIÓN... 4 Características Hardware... 4 ETAPAS Y CARACTERISTICAS ESPECÍFICAS... 5 1. Entrada de voltaje... 5 2. Reset... 5 3. Pines utilizador
TARJETA M95 L80 ARDUINO TABLA DE CONTENIDO INTRODUCCIÓN... 3 DESCRIPCIÓN... 4 Características Hardware... 4 ETAPAS Y CARACTERISTICAS ESPECÍFICAS... 5 1. Entrada de voltaje... 5 2. Reset... 5 3. Pines utilizador
Armado de la placa np07
 Armado de la placa np07 Release 0 Mateo Carabajal Oct 23, 2016 CONTENTS 1 placa robotica np07 3 1.1 caracteristicas tecnicas.......................................... 3 1.2 listado de componentes..........................................
Armado de la placa np07 Release 0 Mateo Carabajal Oct 23, 2016 CONTENTS 1 placa robotica np07 3 1.1 caracteristicas tecnicas.......................................... 3 1.2 listado de componentes..........................................
ELECTRÓNICA - SOFTWARE - AUTOMATION www.delcomp.pe 2011 DELCOMP S.A.C.
 TABLA DE CONTENIDOS 1) INTRODUCCIÓN 2) CONECTIVIDAD 3) TCP/IP 4) MODULOS 5) EJEMPLOS INTRODUCCIÓN La Tarjeta de Desarrollo PIC 18FJ S1 es un módulo de desarrollo electrónico con Microcontroladores práctico
TABLA DE CONTENIDOS 1) INTRODUCCIÓN 2) CONECTIVIDAD 3) TCP/IP 4) MODULOS 5) EJEMPLOS INTRODUCCIÓN La Tarjeta de Desarrollo PIC 18FJ S1 es un módulo de desarrollo electrónico con Microcontroladores práctico
DOCUMENTACIÓN PARA LA FABRICACIÓN DE LA PLATAFORMA GUADALBOT. Placa Base I.E.S VIRGEN DE LAS NIEVES
 DOCUMENTACIÓN PARA LA FABRICACIÓN DE LA PLATAFORMA GUADALBOT I.E.S VIRGEN DE LAS NIEVES Placa Base Página 2. Descripción Página 8. Esquema eléctrico Página 9. Lista de materiales Página 10. Cara Top: Trazado
DOCUMENTACIÓN PARA LA FABRICACIÓN DE LA PLATAFORMA GUADALBOT I.E.S VIRGEN DE LAS NIEVES Placa Base Página 2. Descripción Página 8. Esquema eléctrico Página 9. Lista de materiales Página 10. Cara Top: Trazado
Esquemático y referencia de diseño
 Arduino Yún parte Frontal Arduino Yún Parte trasera Información General El Arduino Yun es una placa electrónica basada en el ATmega32u4 y el Atheros AR9331. El procesador Atheros es compatible con una
Arduino Yún parte Frontal Arduino Yún Parte trasera Información General El Arduino Yun es una placa electrónica basada en el ATmega32u4 y el Atheros AR9331. El procesador Atheros es compatible con una
Procedimiento para alambrar una Función
 Procedimiento para alambrar una Función Función para visualizar la salida en un Display 7 Segmentos. Ing. Ma. Del Socorro Guevara Rdz. Materia Necesario: Proto- Board (tarjeta de Prototipos) Alambre tipo
Procedimiento para alambrar una Función Función para visualizar la salida en un Display 7 Segmentos. Ing. Ma. Del Socorro Guevara Rdz. Materia Necesario: Proto- Board (tarjeta de Prototipos) Alambre tipo
SIMULACIÓN CON PROTEUS
 UNIVERSIDAD DEL VALLE ESCUELA DE INGENIERIA ELÉCTRICA Y ELÉCTRONICA CÁTEDRA DE PERCEPCIÓN Y SISTEMAS INTELIGENTES LABORATORIO 2: PROTEUS 1. OBJETIVOS SIMULACIÓN CON PROTEUS Introducir al estudiante en
UNIVERSIDAD DEL VALLE ESCUELA DE INGENIERIA ELÉCTRICA Y ELÉCTRONICA CÁTEDRA DE PERCEPCIÓN Y SISTEMAS INTELIGENTES LABORATORIO 2: PROTEUS 1. OBJETIVOS SIMULACIÓN CON PROTEUS Introducir al estudiante en
Se tomaron en cuenta tres marcas fabricantes para este módulo:
 109 3. Modulo de Interface a. Selección Debido a que el módulo de visión CMUCam1 requiere una serie de instrucciones para poder realizar una acción, se tuvo la necesidad de adquirir un módulo adicional,
109 3. Modulo de Interface a. Selección Debido a que el módulo de visión CMUCam1 requiere una serie de instrucciones para poder realizar una acción, se tuvo la necesidad de adquirir un módulo adicional,
TARJETAS DE ENTRENAMIENTO CON MICROCONTROLADORES Y DSPIC DE MICROCHIP
 TARJETAS DE ENTRENAMIENTO CON MICROCONTROLADORES Y DSPIC DE MICROCHIP Página 2: TARJETA DE ENTRENAMIENTO CON LOS PIC DE 40 PINES 16F887, 16F1937 Y 18F4620 DE MICROCHIP. REF: KMCH2 Página 6: TARJETA DE
TARJETAS DE ENTRENAMIENTO CON MICROCONTROLADORES Y DSPIC DE MICROCHIP Página 2: TARJETA DE ENTRENAMIENTO CON LOS PIC DE 40 PINES 16F887, 16F1937 Y 18F4620 DE MICROCHIP. REF: KMCH2 Página 6: TARJETA DE
Raspberry Pi Expansion Board v1.01 Datasheet. Electroensaimada
 Raspberry Pi Expansion Board v1.01 Datasheet Electroensaimada ÍNDICE 1 Descripción.... 3 2 Alimentación.... 4 2.1 Con micro USB 5V... 5 2.2 Con conector de la placa exterior... 5 3 Leds... 6 4 ADC... 7
Raspberry Pi Expansion Board v1.01 Datasheet Electroensaimada ÍNDICE 1 Descripción.... 3 2 Alimentación.... 4 2.1 Con micro USB 5V... 5 2.2 Con conector de la placa exterior... 5 3 Leds... 6 4 ADC... 7
QUÉ ES MBOT? Conectores RJ25
 1 QUÉ ES MBOT? mbot es el kit educativo, ideal para niños y centros de enseñanza, para iniciarse en robótica, programación y electrónica. Está basado en Arduino y Scratch (dos conocidos hardware y software
1 QUÉ ES MBOT? mbot es el kit educativo, ideal para niños y centros de enseñanza, para iniciarse en robótica, programación y electrónica. Está basado en Arduino y Scratch (dos conocidos hardware y software
Arquitectura de Computadores
 Arquitectura de Computadores Entrega 1 En el siguiente informe detallamos el proyecto que realizaremos como grupo durante el siguiente semestre. Consistirá en un sistema de protección integral para piscinas,
Arquitectura de Computadores Entrega 1 En el siguiente informe detallamos el proyecto que realizaremos como grupo durante el siguiente semestre. Consistirá en un sistema de protección integral para piscinas,
Robots para todos con Picaxe (I) El MED1 Picaxe Walker
 El MED1 Picaxe Walker") Robots para todos con Picaxe (I) El MED1 Picaxe Walker Antes de nada quiero expresar mi gratitud a Revolution Education en el Reino Unido por un producto de excelencia. No soy experto en este campo, pero
Robots para todos con Picaxe (I) El MED1 Picaxe Walker Antes de nada quiero expresar mi gratitud a Revolution Education en el Reino Unido por un producto de excelencia. No soy experto en este campo, pero
GENERADOR DE PULSOS CON 555
 GENERADOR DE PULSOS CON 555 El generador de pulsos es ampliamente utilizado en aplicaciones digitales como el corazón del circuito ya que permite que estos funcionen. También se puede utilizar como modulador
GENERADOR DE PULSOS CON 555 El generador de pulsos es ampliamente utilizado en aplicaciones digitales como el corazón del circuito ya que permite que estos funcionen. También se puede utilizar como modulador
Tema: Manejo del Puerto Serie con LabView
 Facultad: Ingeniería Escuela: Electrónica Asignatura: Interfaces y Periféricos Tema: Manejo del Puerto Serie con LabView Objetivos Específicos. Configurar la entrada y salida del puerto serie por medio
Facultad: Ingeniería Escuela: Electrónica Asignatura: Interfaces y Periféricos Tema: Manejo del Puerto Serie con LabView Objetivos Específicos. Configurar la entrada y salida del puerto serie por medio
Descripción del sistema eléctrico CAN-BUS con pantallas táctiles.
 Descripción del sistema eléctrico CAN-BUS con pantallas táctiles. el sistema can-bus y las pantallas táctiles para gestionar y tener la supervisión y el control de los sistemas en las ambulancias, los
Descripción del sistema eléctrico CAN-BUS con pantallas táctiles. el sistema can-bus y las pantallas táctiles para gestionar y tener la supervisión y el control de los sistemas en las ambulancias, los
ACLAS PP9 Impresora fiscal térmica
 ACLAS PP9 Impresora fiscal térmica Descripción La impresora ACLAS PP9 es una impresora fiscal térmica que cuenta con un diseño compacto y moderno. Posee una batería interna, lo que permite continuar trabajando,
ACLAS PP9 Impresora fiscal térmica Descripción La impresora ACLAS PP9 es una impresora fiscal térmica que cuenta con un diseño compacto y moderno. Posee una batería interna, lo que permite continuar trabajando,
Microchip Tips & Tricks...
 ARTICULO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de EduDevices. Soluciones de Control de Motores en DC. Introducción: Cada circuito para controlar un motor puede ser dividido
ARTICULO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de EduDevices. Soluciones de Control de Motores en DC. Introducción: Cada circuito para controlar un motor puede ser dividido
MCP2200, Conversor serial USB 2.0 a UART de MICROCHIP...
 ARTICULO TECNICO MCP2200, Conversor serial USB 2.0 a UART de MICROCHIP......Aplicaciones USB 2.0 YA!! Por el Departamento de Ingeniería de EduDevices. Microchip Semiconductor recientemente ha lanzado al
ARTICULO TECNICO MCP2200, Conversor serial USB 2.0 a UART de MICROCHIP......Aplicaciones USB 2.0 YA!! Por el Departamento de Ingeniería de EduDevices. Microchip Semiconductor recientemente ha lanzado al
INFORMACION DE PRODUCTO. Sistema de Encendido Electrónico
 SISTEMA DE ENCENDIDO ELECTRÓNICO Sistema de Encendido Electrónico Principio General de Funcionamiento Los motores a gas necesitan de una chispa para el inicio del ciclo de combustión. Esta chispa se forma
SISTEMA DE ENCENDIDO ELECTRÓNICO Sistema de Encendido Electrónico Principio General de Funcionamiento Los motores a gas necesitan de una chispa para el inicio del ciclo de combustión. Esta chispa se forma
Programa de Tecnologías Educativas Avanzadas. Bach. Pablo Sanabria Campos
 Programa de Tecnologías Educativas Avanzadas Bach. Pablo Sanabria Campos Agenda Conceptos básicos. Relación entre corriente, tensión y resistencia. Conductores, aislantes y semiconductores. Elementos importantes
Programa de Tecnologías Educativas Avanzadas Bach. Pablo Sanabria Campos Agenda Conceptos básicos. Relación entre corriente, tensión y resistencia. Conductores, aislantes y semiconductores. Elementos importantes
MARCA: SIN MARCA MODELO: SIN MODELO
 PAGINA : 1DE7 B512000280070 2.00 C/U TARJETA FPGA VARITEK 20 1368.5000 2737.00 PAGINA : 2DE7 TARJETA FPGA VARITEK 20 EL MÓDULO VARITEK 20 DISPONE DEL ULTIMO MODELO DE FPGA PARA APLICACIONES DE PROCESAMIENTO
PAGINA : 1DE7 B512000280070 2.00 C/U TARJETA FPGA VARITEK 20 1368.5000 2737.00 PAGINA : 2DE7 TARJETA FPGA VARITEK 20 EL MÓDULO VARITEK 20 DISPONE DEL ULTIMO MODELO DE FPGA PARA APLICACIONES DE PROCESAMIENTO
Unidad I Sistemas Digitales
 Unidad I Sistemas Digitales Rafael Vázquez Pérez Arquitectura de Computadoras Agenda 1. Electrónica, electrónica analógica y digital. 2. Circuitos y sistemas digitales. 3. Sistemas de representación, binaria,
Unidad I Sistemas Digitales Rafael Vázquez Pérez Arquitectura de Computadoras Agenda 1. Electrónica, electrónica analógica y digital. 2. Circuitos y sistemas digitales. 3. Sistemas de representación, binaria,
MANUAL DE USUARIO ESCLUSA Z14 VERSIÓN 5
 MANUAL DE USUARIO ESCLUSA Z14 VERSIÓN 5 1 Indice Página 1. Introducción.. 3 2. Especificaciones... 3 3. Descripción de la Esclusa. 4 4. Funcionamiento de la Esclusa 6 Modo Libre 6 Modo Seguridad 7 Configuración
MANUAL DE USUARIO ESCLUSA Z14 VERSIÓN 5 1 Indice Página 1. Introducción.. 3 2. Especificaciones... 3 3. Descripción de la Esclusa. 4 4. Funcionamiento de la Esclusa 6 Modo Libre 6 Modo Seguridad 7 Configuración
CAPITULO IV PROTOCOLO DE PRUEBAS
 CAPITULO IV PROTOCOLO DE PRUEBAS Introducción Este capítulo ha sido dedicado al protocolo de pruebas a todo el módulo de adquisición de datos en cada una de sus tarjetas como son: Fuente de alimentación
CAPITULO IV PROTOCOLO DE PRUEBAS Introducción Este capítulo ha sido dedicado al protocolo de pruebas a todo el módulo de adquisición de datos en cada una de sus tarjetas como son: Fuente de alimentación
INSTRUCCIONES PROGRAMADOR ATR-901. Introducción...2
 INSTRUCCIONES PROGRAMADOR ATR-901 Índice Introducción...2 1. Funciones de los displays y teclas...2 1.1 Indicadores numéricos (displays)...3 1.2 Significado de los indicadores luminosos (leds)...3 1.3
INSTRUCCIONES PROGRAMADOR ATR-901 Índice Introducción...2 1. Funciones de los displays y teclas...2 1.1 Indicadores numéricos (displays)...3 1.2 Significado de los indicadores luminosos (leds)...3 1.3
Guía para construir un programador y una mini placa de desarrollo para el microcontrolador PIC
 Guía para construir un programador y una mini placa de desarrollo para el microcontrolador PIC Rafael Fernández Andrés Aguirre Introducción: Esto de ninguna manera pretende ser una guía completa de como
Guía para construir un programador y una mini placa de desarrollo para el microcontrolador PIC Rafael Fernández Andrés Aguirre Introducción: Esto de ninguna manera pretende ser una guía completa de como
Figura 8.1. Autómata programable S7 314 de Siemens con módulos de entrada/salida concentrada
 Figura 8.1. Autómata programable S7 314 de Siemens con módulos de entrada/salida concentrada o local. Figura 8.2. Autómata programable de la familia S7-400 conectado a una unidad de entrada/salida remota.
Figura 8.1. Autómata programable S7 314 de Siemens con módulos de entrada/salida concentrada o local. Figura 8.2. Autómata programable de la familia S7-400 conectado a una unidad de entrada/salida remota.
8. Instrumentación y sistema de adquisición de datos
 8. Instrumentación y sistema de adquisición de datos Para poder obtener la información de interés del ensayo como son las potencias, energías, rendimientos Es necesario colocar sensores en todos los equipos.
8. Instrumentación y sistema de adquisición de datos Para poder obtener la información de interés del ensayo como son las potencias, energías, rendimientos Es necesario colocar sensores en todos los equipos.
Robótica en la Universidad
 Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Robótica en la Universidad Juan González Gómez Escuela Politécnica Superior Universidad Autónoma de Madrid Andrés Prieto-Moreno Torres Ifara Tecnologías Profesor asociado UAM Semana de la Ciencia, UPSAM
Registros SFR vistos hasta ahora: Microcontroladores PIC
 Registros SFR vistos hasta ahora: Microcontroladores PIC Microcontroladores PIC: Timer Características del Timer TMR0: Cumple básicamente la función de contador de eventos (o divisor de frecuencia). El
Registros SFR vistos hasta ahora: Microcontroladores PIC Microcontroladores PIC: Timer Características del Timer TMR0: Cumple básicamente la función de contador de eventos (o divisor de frecuencia). El
Soluciones de Iluminación con LED
 ARTICULO TECNICO Soluciones de Iluminación con LED Por el Depto. de Ingeniería de EduDevices. Introducción. Iluminación con LED Los LEDs, desarrollados en la década de los 70 s, ya no solo son utilizados
ARTICULO TECNICO Soluciones de Iluminación con LED Por el Depto. de Ingeniería de EduDevices. Introducción. Iluminación con LED Los LEDs, desarrollados en la década de los 70 s, ya no solo son utilizados
SYNERGY - KIOSKO TERMINAL DE MARCAJE BASADO EN LINUX
 SYNERGY - KIOSKO TERMINAL DE MARCAJE BASADO EN LINUX Pantalla en Color, Monitor en Tiempo-Real, Terminal Multimedia. Visualización gráfica en color Alimentación sobre Ethernet (POE) USB 1.1 (flash) Altavoz
SYNERGY - KIOSKO TERMINAL DE MARCAJE BASADO EN LINUX Pantalla en Color, Monitor en Tiempo-Real, Terminal Multimedia. Visualización gráfica en color Alimentación sobre Ethernet (POE) USB 1.1 (flash) Altavoz
CAPITULO 1 INTRODUCCION AL PROYECTO
 CAPITULO 1 INTRODUCCION AL PROYECTO 1 INTRODUCCION AL PROYECTO 1.1 Marco Teórico Los procesadores digitales de señales ganaron popularidad en los años sesentas con la introducción de la tecnología de estado
CAPITULO 1 INTRODUCCION AL PROYECTO 1 INTRODUCCION AL PROYECTO 1.1 Marco Teórico Los procesadores digitales de señales ganaron popularidad en los años sesentas con la introducción de la tecnología de estado
Manual de usuario. PICnano v1. Programador/depurador de PIC s
 Manual de usuario 1 Programador/depurador de PIC s Manual de usuario Contenido: 1.-Descripción general.. 3 1.1-Identificando las partes de 3 1.2-Conociendo la Interfaz (Software).. 4 2.-Formas de Programación.
Manual de usuario 1 Programador/depurador de PIC s Manual de usuario Contenido: 1.-Descripción general.. 3 1.1-Identificando las partes de 3 1.2-Conociendo la Interfaz (Software).. 4 2.-Formas de Programación.
CONTROLADORAS EDUCATIVAS. Por: Pedro Ruiz
 CONTROLADORAS EDUCATIVAS. Por: Pedro Ruiz CONTROLADORAS EDUCATIVAS. Índice 1. Introducción. 2. Definición de controladora, tipología. 3. Documentación. 1. Introducción. En este tema vamos a conocer una
CONTROLADORAS EDUCATIVAS. Por: Pedro Ruiz CONTROLADORAS EDUCATIVAS. Índice 1. Introducción. 2. Definición de controladora, tipología. 3. Documentación. 1. Introducción. En este tema vamos a conocer una
Manual de uso DRIVER DR-D30
 Manual de uso DRIVER DR-D30 InteliMotor: Control Inteligente para Motores. 1 Control para dos motores: Modelo DR-D30 [24/12v] Diseñado especialmente para controlar simultáneamente dos motores de corriente
Manual de uso DRIVER DR-D30 InteliMotor: Control Inteligente para Motores. 1 Control para dos motores: Modelo DR-D30 [24/12v] Diseñado especialmente para controlar simultáneamente dos motores de corriente
MODULO 5: EL MICROPROCESADOR
 MODULO 5: EL MICROPROCESADOR Este dispositivo es el encargado de realizar las operaciones de calculo, recibir todas las ordenes y supervisar su cumplimiento. Administra todo el hardware conectado a la
MODULO 5: EL MICROPROCESADOR Este dispositivo es el encargado de realizar las operaciones de calculo, recibir todas las ordenes y supervisar su cumplimiento. Administra todo el hardware conectado a la
REALITY SYS Pico JukeBox V2.1 Instalación 1
 . REALITY SYS Pico JukeBox V2. Instalación . Preparación de la tarjeta SD/MMC. Copie los archivos mp3 que contienen las pistas de audio en una tarjeta nueva o formateada. Los archivos audio se deben grabar
. REALITY SYS Pico JukeBox V2. Instalación . Preparación de la tarjeta SD/MMC. Copie los archivos mp3 que contienen las pistas de audio en una tarjeta nueva o formateada. Los archivos audio se deben grabar
Repetidores RadioRA 2
 Los repetidores RadioRA 2 amplían el alcance de las señales de radiofrecuencia () que se envían entre dispositivos. Los repetidores garantizan una comunicación sin errores entre los componentes del sistema
Los repetidores RadioRA 2 amplían el alcance de las señales de radiofrecuencia () que se envían entre dispositivos. Los repetidores garantizan una comunicación sin errores entre los componentes del sistema
Taller de Introducción a Arduino. Impartido por Abel Arellano y Omar Valencia. Duración: 5 sesiones de 4 horas del -- al --- Presentación:
 Taller de Introducción a Arduino Impartido por Abel Arellano y Omar Valencia Duración: 5 sesiones de 4 horas del -- al --- Presentación: La presencia de computadoras en sus diferentes formas es cada vez
Taller de Introducción a Arduino Impartido por Abel Arellano y Omar Valencia Duración: 5 sesiones de 4 horas del -- al --- Presentación: La presencia de computadoras en sus diferentes formas es cada vez
APRENDA PASO POR PASO COMO ENCENDER Y APAGAR UN LED EN EL SISTEMA EB88, PROGRAMANDO EN ANSI C
 1 APRENDA PASO POR PASO COMO ENCENDER Y APAGAR UN LED EN EL SISTEMA EB88, PROGRAMANDO EN ANSI C PASO 1: TENER CARPETA LISTA. Tenga lista la carpeta Cómo encender y apagar un led programando en ANSI C.
1 APRENDA PASO POR PASO COMO ENCENDER Y APAGAR UN LED EN EL SISTEMA EB88, PROGRAMANDO EN ANSI C PASO 1: TENER CARPETA LISTA. Tenga lista la carpeta Cómo encender y apagar un led programando en ANSI C.
MANUAL USUARIO BASED BY ORIGINAL. PICkit 2
 MANUAL USUARIO BASED BY ORIGINAL PICkit 2 PICKIT 2 PLUS programmer es una potente herramienta para la programación de microcontroladores PIC de MICROCHIP, el cual permite programar una gran gama de microcontroladores
MANUAL USUARIO BASED BY ORIGINAL PICkit 2 PICKIT 2 PLUS programmer es una potente herramienta para la programación de microcontroladores PIC de MICROCHIP, el cual permite programar una gran gama de microcontroladores
Ardunio. Test Placa. LunikSoft. Fco. Javier Andrade.
 LunikSoft Fco. Javier Andrade http://www.luniksoft.info El autor no se responsabiliza del contenido. No asume ninguna responsabilidad, por cualquier inexactitud en la documentación, en los programas, en
LunikSoft Fco. Javier Andrade http://www.luniksoft.info El autor no se responsabiliza del contenido. No asume ninguna responsabilidad, por cualquier inexactitud en la documentación, en los programas, en
GUÍA DE APRENDIZAJE N GTSMA /05/ IDENTIFICACIÓN DE LA GUÍA DE APRENDIZAJE
 1. IDENTIFICACIÓN DE LA GUÍA DE APRENDIZAJE Programa de Formación: Técnico en sistemas Código: 228172 Versión: 1 Nombre del Proyecto: Código:340995 Conformación de mesa de ayuda Fase del proyecto: Ejecución
1. IDENTIFICACIÓN DE LA GUÍA DE APRENDIZAJE Programa de Formación: Técnico en sistemas Código: 228172 Versión: 1 Nombre del Proyecto: Código:340995 Conformación de mesa de ayuda Fase del proyecto: Ejecución
SISTEMA DE CLIMATIZACIÓN RADIANTE SISTEMA REMOTO DE REGULACIÓN AMBIENTE ALB VÍA RADIO BASE DE CONEXIONES INALÁMBRICAS ALB. 1.
 SISTEMA REMOTO DE REGULACIÓN AMBIENTE ALB VÍA RADIO BASE DE CONEXIONES INALÁMBRICAS ALB 1. Descripción La base de conexiones ALB puede controlar completamente un sistema de suelo radiante de forma inalámbrica.
SISTEMA REMOTO DE REGULACIÓN AMBIENTE ALB VÍA RADIO BASE DE CONEXIONES INALÁMBRICAS ALB 1. Descripción La base de conexiones ALB puede controlar completamente un sistema de suelo radiante de forma inalámbrica.
2002 Emerson Process Management. Todos los derechos reservados. Vea este y otros cursos en línea en
 2002 Emerson Process Management. Todos los derechos reservados. Vea este y otros cursos en línea en www.plantwebuniversity.com. Fieldbus 303 Hardware de segmento Generalidades Componentes requeridos y
2002 Emerson Process Management. Todos los derechos reservados. Vea este y otros cursos en línea en www.plantwebuniversity.com. Fieldbus 303 Hardware de segmento Generalidades Componentes requeridos y
Instalación Configuración de Sistema Actividad13. Este documento está dividido en 3 secciones:
 Guía de configuración Joystick VEXNet El VEXnet Joystick permite algo más que el control remoto del robot. También proporciona la comunicación inalámbrica entre la computadora y el VEX cortex (microcontrolador),
Guía de configuración Joystick VEXNet El VEXnet Joystick permite algo más que el control remoto del robot. También proporciona la comunicación inalámbrica entre la computadora y el VEX cortex (microcontrolador),
Diseño y construcción de un cartel modular de LEDs para prácticas de electrónica
 Cartel de LEDs Diseño y construcción de un cartel modular de Diego Brengi, Néstor Mariño, Christian Huy, Rodrigo Gómez, Gerardo García, Marcelo Márquez, Ignacio Zaradnik, Cristian Rasch Universidad Nacional
Cartel de LEDs Diseño y construcción de un cartel modular de Diego Brengi, Néstor Mariño, Christian Huy, Rodrigo Gómez, Gerardo García, Marcelo Márquez, Ignacio Zaradnik, Cristian Rasch Universidad Nacional
Manual de usuario del PicKit2. Manual de usuario del PicKit2
 Manual de usuario del PicKit2 1 INTRODUCCIÓN: Debido a la popularidad del programador PicKit2, como herramienta de aprendizaje he decidido hacer la traducción al idioma castellano del manual, con las cosas
Manual de usuario del PicKit2 1 INTRODUCCIÓN: Debido a la popularidad del programador PicKit2, como herramienta de aprendizaje he decidido hacer la traducción al idioma castellano del manual, con las cosas
NoMADA Go White Paper [REV 008A-NoMADA-08/15] Especificaciones Técnicas NoMADA Go. Diseñado por: NoMADA Go White Paper
![NoMADA Go White Paper [REV 008A-NoMADA-08/15] Especificaciones Técnicas NoMADA Go. Diseñado por: NoMADA Go White Paper](/thumbs/49/25798293.jpg "NoMADA Go White Paper [REV 008A-NoMADA-08/15] Especificaciones Técnicas NoMADA Go. Diseñado por: NoMADA Go White Paper") NoMADA Go White Paper [REV 008A-NoMADA-08/15] Especificaciones Técnicas NoMADA Go Diseñado por: NoMADA Go es una herramienta que permite crear aplicaciones mecatrónicas utilizando el microcontrolador AVR
NoMADA Go White Paper [REV 008A-NoMADA-08/15] Especificaciones Técnicas NoMADA Go Diseñado por: NoMADA Go es una herramienta que permite crear aplicaciones mecatrónicas utilizando el microcontrolador AVR
Tema: Microprocesadores
 Universidad Nacional de Ingeniería Arquitectura de Maquinas I Unidad I: Introducción a los Microprocesadores y Microcontroladores. Tema: Microprocesadores Arq. de Computadora I Ing. Carlos Ortega H. 1
Universidad Nacional de Ingeniería Arquitectura de Maquinas I Unidad I: Introducción a los Microprocesadores y Microcontroladores. Tema: Microprocesadores Arq. de Computadora I Ing. Carlos Ortega H. 1
Esquema de partida. Maximum Operating Supply Voltage 5.5V USB 1 USART 1
 PROYECTO: INTERFACE USB CON PIC 18F4550 Especificaciones. Dispone de 8 entradas digitales, 8 salidas digitales, 8 entradas analógicas(entre 0 y 5 voltios 10 bits ) y 2 salidas analógicas(entre 0 y 5 voltios).
PROYECTO: INTERFACE USB CON PIC 18F4550 Especificaciones. Dispone de 8 entradas digitales, 8 salidas digitales, 8 entradas analógicas(entre 0 y 5 voltios 10 bits ) y 2 salidas analógicas(entre 0 y 5 voltios).
Diseño del módulo RS-232. Por Michael Kusch tintronic@yahoo.com Versión preliminar 0.2
 Diseño del módulo RS-. Por Michael Kusch tintronic@yahoo.com Versión preliminar 0. Introducción Muchos microcontroladores poseen una interfaz UART o USART para comunicación serial asincrónica, tipo RS-,
Diseño del módulo RS-. Por Michael Kusch tintronic@yahoo.com Versión preliminar 0. Introducción Muchos microcontroladores poseen una interfaz UART o USART para comunicación serial asincrónica, tipo RS-,
Registros de desplazamiento
 Registros de desplazamiento Definición de registro de desplazamiento básico Tipos de registro de desplazamiento Configuraciones específicas Aplicaciones más típicas VHDL Ejercicio propuestos Definición
Registros de desplazamiento Definición de registro de desplazamiento básico Tipos de registro de desplazamiento Configuraciones específicas Aplicaciones más típicas VHDL Ejercicio propuestos Definición
Guía de Usuario Convertidor USB-Serial
 Guía de Usuario Convertidor USB-Serial Tecnología Digital del Bajío Av. Vicente Guerrero 1003 Irapuato, Gto. Mex. C.P. 36690 Teléfono: (462) 145 35 22 www.tecdigitaldelbajio.com ventas@tecdigitaldelbajio.com
Guía de Usuario Convertidor USB-Serial Tecnología Digital del Bajío Av. Vicente Guerrero 1003 Irapuato, Gto. Mex. C.P. 36690 Teléfono: (462) 145 35 22 www.tecdigitaldelbajio.com ventas@tecdigitaldelbajio.com
CAPÍTULO 1 INTRODUCCIÓN
 CAPÍTULO 1 INTRODUCCIÓN INTRODUCCIÓN La UDLA en colaboración con el IMTA, se han planteado el objetivo de desarrollar un prototipo de globo meteorológico. Será un equipo que pueda ser enviado hacia cualquier
CAPÍTULO 1 INTRODUCCIÓN INTRODUCCIÓN La UDLA en colaboración con el IMTA, se han planteado el objetivo de desarrollar un prototipo de globo meteorológico. Será un equipo que pueda ser enviado hacia cualquier
PRÁCTICAS DE ELECTRÓNICA 4º E.S.O.
 PRÁCTICAS DE ELECTRÓNICA 4º E.S.O. DEPARTAMENTO DE TECNOLOGÍA I.E.S. SEFARAD www.tecnosefarad.com ALUMNO/A: GRUPO: 1. INTRODUCCIÓN Las prácticas se realizarán de la siguiente manera: En este cuaderno se
PRÁCTICAS DE ELECTRÓNICA 4º E.S.O. DEPARTAMENTO DE TECNOLOGÍA I.E.S. SEFARAD www.tecnosefarad.com ALUMNO/A: GRUPO: 1. INTRODUCCIÓN Las prácticas se realizarán de la siguiente manera: En este cuaderno se
Control Teaching de un Brazo Robot de Cinco Grados de Libertad
 Control Teaching de un Brazo Robot de Cinco Grados de Libertad Michel Ibáñez a610221@upc.edu.pe Christian R. Reátegui amoran@upc.edu.pe Asesor: Ing. Antonio Moran amoran@upc.edu.pe Universidad Peruana
Control Teaching de un Brazo Robot de Cinco Grados de Libertad Michel Ibáñez a610221@upc.edu.pe Christian R. Reátegui amoran@upc.edu.pe Asesor: Ing. Antonio Moran amoran@upc.edu.pe Universidad Peruana
CURSO DE VACACIONES DE INVIERNO 2015
 CURSO DE VACACIONES DE INVIERNO 2015 Experimentos 1 Con el robot t-17 podrás desarrollar tus primeros experimentos donde articularás electrónica, mecánica e informática, aprendiendo así principios básicos
CURSO DE VACACIONES DE INVIERNO 2015 Experimentos 1 Con el robot t-17 podrás desarrollar tus primeros experimentos donde articularás electrónica, mecánica e informática, aprendiendo así principios básicos
Práctica No. 1 Medición de voltajes, corrientes y resistencias con el multímetro digital y comprobación de la Ley de Ohm.
 Práctica No. 1 Medición de voltajes, corrientes y resistencias con el multímetro digital y comprobación de la Ley de Ohm. Objetivos: 1.- Conocer y utilizar el protoboard para implementar circuitos sencillos.
Práctica No. 1 Medición de voltajes, corrientes y resistencias con el multímetro digital y comprobación de la Ley de Ohm. Objetivos: 1.- Conocer y utilizar el protoboard para implementar circuitos sencillos.
CONTROLES ELÉCTRICOS PRÁCTICA 6: PROGRAMACIÓN DE PLC UNIDAD 5 LIRA MARTÍNEZ MANUEL ALEJANDRO DOCENTE: PACHECO HIPÓLITO JAVIER
 CONTROLES ELÉCTRICOS PRÁCTICA 6: PROGRAMACIÓN DE PLC UNIDAD 5 LIRA MARTÍNEZ MANUEL ALEJANDRO DOCENTE: PACHECO HIPÓLITO JAVIER ENTREGA: 26/11/2010 1 INTRODUCCIÓN La tecnología es cada vez más sencilla de
CONTROLES ELÉCTRICOS PRÁCTICA 6: PROGRAMACIÓN DE PLC UNIDAD 5 LIRA MARTÍNEZ MANUEL ALEJANDRO DOCENTE: PACHECO HIPÓLITO JAVIER ENTREGA: 26/11/2010 1 INTRODUCCIÓN La tecnología es cada vez más sencilla de
Interfaz para Autosal Guildline 8400B Versión 1.01
 Interfaz para Autosal Guildline 8400B Versión 1.01 Manual Técnico Alvaro Cubiella 1,2 y Matías Kruk 2,3 Gabinete Oceanografía Física Instituto Nacional de Investigación y Desarrollo Pesquero Proyecto South
Interfaz para Autosal Guildline 8400B Versión 1.01 Manual Técnico Alvaro Cubiella 1,2 y Matías Kruk 2,3 Gabinete Oceanografía Física Instituto Nacional de Investigación y Desarrollo Pesquero Proyecto South
Interfaz de Receptor de Bucle de 4-20mA en Aplicación con DSPIC
 Interfaz de Receptor de Bucle de 4-20mA en Aplicación con DSPIC M.Sc. Carlos Valdivieso 1, Israel Pazmiño R 2, Andrés Torres 3 Facultad de Ingeniería en Electricidad y Computación (FIEC) Escuela Superior
Interfaz de Receptor de Bucle de 4-20mA en Aplicación con DSPIC M.Sc. Carlos Valdivieso 1, Israel Pazmiño R 2, Andrés Torres 3 Facultad de Ingeniería en Electricidad y Computación (FIEC) Escuela Superior
CAPACITACIONES E INNOVACIONES TECNOLÓGICAS ICTS
 CAPACITACIONES E INNOVACIONES TECNOLÓGICAS ICTS Formando profesionales integrales en el área de las telecomunicaciones y computación. Catalogo Equipos I Módulo Arduino Noviembre 2015 www.icts.com.ec capacitaciones@icts.com.ec
CAPACITACIONES E INNOVACIONES TECNOLÓGICAS ICTS Formando profesionales integrales en el área de las telecomunicaciones y computación. Catalogo Equipos I Módulo Arduino Noviembre 2015 www.icts.com.ec capacitaciones@icts.com.ec
Sistemas Elec. Digitales. Instrumentación del laboratorio. Pag. 1 1. INSTRUMENTACIÓN DEL LABORATORIO.
 Sistemas Elec. Digitales. Instrumentación del laboratorio. Pag. 1 1. INSTRUMENTACIÓN DEL LABORATORIO. Sistemas Elec. Digitales. Instrumentación del laboratorio. Pag. 2 1.1. Fuente de alimentación CPS250
Sistemas Elec. Digitales. Instrumentación del laboratorio. Pag. 1 1. INSTRUMENTACIÓN DEL LABORATORIO. Sistemas Elec. Digitales. Instrumentación del laboratorio. Pag. 2 1.1. Fuente de alimentación CPS250