Integración de Equipos para Comunicaciones Tema1: Introducción a los buses
|
|
|
- Victoria Revuelta Carmona
- hace 6 años
- Vistas:
Transcripción
.")
1 Integración de Equipos para Comunicaciones Tema1: Introducción a los buses Aurelio Vega Martínez DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 1
2 Indice 1.1 Introducción. 1.2 Propiedades de los buses. 1.3 Características de los buses. 1.4 Jerarquía de los buses. 1.5 Prestaciones de los Buses. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 2
3 1.1.- Introducción a los Buses. BUS: Elemento fundamental de intercomunicación en la arquitectura de Von Newmann. Se define mediante: Número y tipo de líneas que lo componen. Protocolo de transmisión de información. Consta de un camino que permite comunicar selectivamente un cierto número de componentes o dispositivos, de acuerdo a unas ciertas reglas o normas de conexión. BUS N µp/µc Memoria Disposi tivos DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 3
4 1.1.- Introducción a los Buses (cont.). El bus incluye los conceptos de enlace y conmutador, ya que permite en cada momento seleccionar los dispositivos que se conectan a través suyo. Enlace: Elemento que permite transmitir información entre dos o más dispositivos. Conmutador: Elemento que permite encaminar la información entre varios enlaces, activando unos e inhibiendo otros. Multiplexado temporal: Utilización de las mismas líneas del bus para enviar en momentos distintos, informaciones distintas. En estos buses de incluyen señales adicionales para identificar qué información está circulando por el bus en cada momento. Sistema Abierto: Sistema que permite acoplar placas de distintos fabricantes. Hasta hace unos años el estudio de los buses era algo que no se hacía, dado que cada fabricante desarrollaba su propio bus. Los sistemas abiertos supusieron la creación de estándares que garantizan la compatibilidad entre las placas diseñadas por distintos fabricantes. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 4



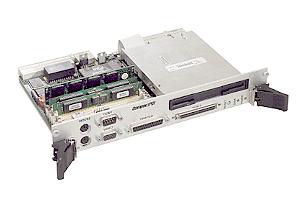
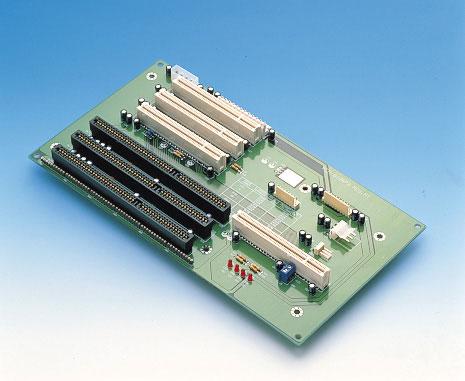
5 Ejemplos de sistemas abiertos DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 5
6 1.2.- Propiedades de los Buses. 1) 1) Banda base. 2) 2) Tri-Estado. 3) 3) Grado de de paralelismo. 4) 4) Temporización. 5) 5) Modo de de operación. 6) 6) Estrategias de de control. 7) 7) Longitud. 8) 8) Velocidad. 9) 9) Capacidad de de conexión. 10) Tipo de de aplicación. 11) Tipos de de ciclo. 12) Tipos de de lógica. 13) Soporte. 14) Atención a interrupciones. 15) Multiproceso. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 6
7 Banda Base. La comunicación a través del bus se realiza sin ningún tipo de modulación Tri-Estado. Para poder conectar mediante un bus paralelo todos los elementos de un sistema es necesario la desconexión total de los elementos que no participan en el intercambio en un momento determinado. Si las líneas conectadas al bus de datos fuesen digitales de dos estados estables se produciría un cortocircuito permanente entre las líneas correspondiente a los diversos componentes Grado de Paralelismo. Serie: Cuando sólo puede transmitir la información bit a bit. Paralelo: Cuando permite transmitir una palabra cada vez. Es el más utilizado. A veces se combina con un mecanismo de multiplexado temporal para ahorrar líneas. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 7
8 Temporización. Bus de Ciclo Completo: Se ocupa el bus durante todo el tiempo que dura la transferencia de una información elemental entre los dos dispositivos que se comunican. Bus de Ciclo Partido: Se divide el tiempo del bus en una serie de pequeñas ranuras (time slots), cada una de las cuales sirve para enviar un mensaje. La transferencia elemental consta generalmente de dos ranuras (la de petición y la de contestación). El bus de ciclo partido es más complejo que el de ciclo completo, ya que la memoria deberá tener circuitos necesarios para: Almacenar la dirección deseada. Almacenar el tipo de operación. Ranura Ranura Ranura Ranura Ranura Ranura Ranura Ranura Ranura Ranura Ranura Ranura Ranura Ranura Almacenar el dato leído o enviado para escritura. Iniciar el envío de mensajes. El bus de ciclo partido permite transmitir un mayor caudal de información. 1 Tiempo DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 8
9 Modo de Operación. Indica la forma en que se realizan las transferencias entre los dispositivos. A)Transferencias Síncronas A-1) Ciclo Completo A-2) Ciclo Partido B) Transferencias Asíncronas B-1) Ciclo Completo B-2) Ciclo Partido C) Transferencias Adaptables DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 9
10 A) Transferencia Síncrona. Se utilizan sólo las siguientes líneas de control. RD : Lectura. WR : Escritura. IO/M : Distinción entre los dispositivos de entrada/salida y memoria. El diálogo está impuesto por el maestro, con un tiempo de respuesta fijo deberá ser respetado en todos los intercambios del bus. La transferencia síncrona es adecuada en sistemas formados por dispositivos rápidos o de tiempos de respuesta similares. En caso de dispositivos de diferentes velocidades, se malgasta mucho tiempo ya que debe ajustarse la velocidad a la del más lento. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 10
11 A-1) Transferencia Síncrona en Ciclo Completo. Lectura Síncrona: 1º) El maestro pone en el bus la dirección deseada. 2º) Supone que el esclavo pone el dato en el bus en el tiempo T, momento en el que el maestro lo toma. Escritura Síncrona: 1º) El maestro pone en el bus la dirección y el dato. 2º) Supone que el esclavo toma la información antes de un tiempo T. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 11
12 A-2) Transferencias Síncronas en Ciclo Partido Léctura síncrona. Consta de dos ranuras El maestro envía la orden de lectura (especificando la dirección deseada). Cuando el esclavo obtiene el dato envía la respuesta en la siguientes ranura disponible. Si pasado un cierto tiempo no se obtiene respuesta, se genera una señal de error Petición Petición Lectura Lectura Dato Dato Tiempo Escritura síncrona. Consta de una ranura en la que el maestro envía el dato y la dirección Se supone que el esclavo toma correctamente dicha información (no existe mecanismo de comprobación) Petición Petición Escritura Escritura Tiempo DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 12
13 B-1) Transferencias Asíncronas en Ciclo Completo Léctura asíncrona: 1º) El maestro pone la dirección deseada. 2º) Espera la confirmación que el esclavo ha puesto el dato (se puede producir señal de error si se sobrepasa el tiempo determinado). 3º) Se lee el dato del bus. Escritura asíncrona. 1º) El maestro pone la dirección y el dato. 2º) Espera la confirmación de que el esclavo ha leído el dato (se puede producir señal de error. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 13
14 B-2) Transferencias Asíncronas en Ciclo Partido Léctura asíncrona: Similar a la lectura síncrona (A2), pero el esclavo antes de enviar el dato confirma si la dirección es correcta. En algunos buses sólo se envía esta confirmación en caso de error. Petición Petición Lectura Lectura Dir. Dir. OK OK Dato Dato Tiempo Escritura asíncrona. En la primera ranura el maestro envía el dato y la dirección. Debe existir confirmación de la escritura en la ranura que corresponda. Petición Petición Escritura Escritura Confirma Confirma Escritura Escritura Tiempo DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 14
15 C) Transferencias Adaptables En este caso el bus es básicamente síncrono, pero dispone de una línea para realizar transferencias asíncronas con algunos dispositivos. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 15
16 Comparación Buses Síncronos-Asíncronos. Desventajas Síncronos. Retraso adicional (~ ½ periodo) para sincronizarse con el bus. Los dispositivos deben tener velocidades similares. Ventajas Síncronos. Facilidad de manejo y simplicidad en el protocolo. Son más inmunes al ruido (sólo son susceptibles al ruido en los flancos. El reloj proporciona el tiempo necesario para establecer las señales en el bus. Desventajas Asíncronos. Más susceptibles al ruido. Protocolos más complejos (> número de líneas). Ventajas Asíncronos. Mejor adaptación a las nuevas tecnologías.se adaptan mejor a las características de velocidad de nuevos dispositivos. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 16
17 Estrategias de control. Se usa el modelo maestro-esclavo. En el caso más sencillo, la CPU es el único maestro, en otros casos, existen muchos maestros temporales (robos de ciclo). Finalmente, puede haber varios maestros que se reparten el uso del bus. Maestros: Son capaces de obtener el uso del bus iniciando sus ciclos y determinando su temporización y su tipo. Permanentes. Temporales. Esclavos: Son capaces únicamente de realizar la transferencia de información de acuerdo con los ciclos generados por los maestros. Estrategias de control del bus: Un único maestro. Varios maestros temporales (DMA). Varios maestros que comparten el bus (multiprocesamiento). DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 17
18 Longitud. Cada bus se diseña con una lóngitud maxima de acuerdo con su aplicación. Interesan buses largos para poder incorporar mayor número de módulos. A mayor longitud menor velocidad (compromiso) Velocidad. Tiene una velocidad de transmisión que depende de factores como longitud, medio empleado y lógica de control. Número de transferencias realizables por segundo. Baudios (bit por segundo). Depende de: longitud. Medio físico (par trenzado, fibra óptica, etc.). Lógica de control, Etc... Sólo podemos medir correctamente los buses síncronos y totalmente definidos. En los asíncronos podemos realizar estimaciones dependientes del procesador empleado en cada caso. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 18
19 Capacidad de conexión. Número máximo de elementos que se pueden conectar Limitado por problemas de direccionamiento y diseño electrónico Aplicación. Aplicación para la cual fue concebido el bus Tipos de ciclos. Lectura de un esclavo por un maestro. Escritura de un maestro por un esclavo. Acceso directo a memoria (DMA). Interrupción. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 19
20 Tipo de lógica. Suelen desarrollarse con lógica negativa debida a: Menor consumo (sobre todo en colectores abierto) Mayor velocidad de conmutación Cuando el dispositivo está apagado toma de forma natural el valor negativo Soporte. Material empleado para la conexión física (pistas de PCB, cables, fibra óptica, etc...) Criterios de selección: Longitud del bus. Sensibilidad al ruido. Velocidad. Grado de paralelismo. Etc... DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 20
21 Atención a Interrupciones. Disponer de varias líneas en paralelo para solicitar la interrupción. Organización en cadena (daisy-chain). IPO: Indica que la propia tarjeta o alguna de mayor prioridad ha solicitado la interrupción. IPI: Activa para indicar que algún dispositivo de mayor prioridad ha solicitado la interrupción. INTACK: Aceptación de interrupción. Algunos sistemas de interrupciones vectorizadas admiten un sistema de arbitraje fuera del bus que establece la prioridad. NMI: Interrupción no enmascarable (máxima prioridad). DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 21
22 Multiproceso. Existencia de varios procesadores. Cuando un procesador necesita el bus debe solicitarlo y esperar a que se libere. Prioridades. Fijas (organización en cadena) Línea de petición de bus Línea para indicar que está libre. BPI/BPO. Variables (controladas por un arbitro) DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 22
23 1.3.- Características de los buses Topologías de Inteconexion Parámetros que definen las prestaciones Descripción de las líneas que componen un bus. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 23
24 Topologías de interconexión. Bus: Se conectan módulos en paralelo a un panel posterior (backplane) Redes de conmutación: Se elige dinámicamente uno de los múltiples caminos posibles (crossbar) Anillo: Un único camino que pasa a través de cada módulo. La información pasa de uno a otro módulo. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 24
25 Parámetros que definen las prestaciones de un bus. Configurabilidad: Los sistemas basados en bus son muy configurables, pues cada ranura del backplane se mantiene conectada a todas las demás. Coste: Menos coste que las interconexiones activas debido a que la naturaleza pasiva de sus conexiones (sólo un conector) reducen el coste de las ranuras no usadas. Escalabilidad: Escalabilidad limitada debido a cuestiones físicas y eléctricas que surgen al conectar muchos dispositivos al mismo conductor y a las restricciones surgidas al permitir sólo un maestro en cada instante. Fiabilidad: La fiabilidad con un ambiente eléctrico y un protocolo lógico bien definidos, puede ser muy alta. En la práctica, ésta es menor porque se diseñan o especifican mal. Velocidad: Indica la cantidad de información que puede transferirse a través de él por unidad de tiempo. Tiempo invertido en transmitir datos Throughput: Tiempo total invertido en transmisión DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 25
 Líneas de Direcciones y Datos.")
 Líneas de Inicialización y Parada.")

26 Descripción de las líneas que componen un bus. 1) Líneas de Direcciones y Datos. 2) Líneas de Control. 3) Líneas de Sincronización. 4) Líneas de Inicialización y Parada. 5) Líneas de Alimentación. 6) Líneas Auxiliares. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 26
27 1) Líneas de Direcciones y Datos. Líneas de Dirección: Permiten el direccionamiento de los espacios de memoria y/o E/S del sistema. Su número va a definir el espacio máximo de direccionamiento. µp de 16 bits 23 líneas de dirección 16 MB. µp de 32 bits 32 líneas de dirección 4 GB. Líneas de datos Permiten el intercambio bidireccional de información entre los distinto módulos de un bus. Su número determina la cantidad de información que se puede transferir en un ciclo de operación (8, 16, 32 o 64 bits). DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 27
28 2) Líneas de Control Líneas de control de memoria y E/S. Las utiliza el procesador para indicar con quién va a efectuar una operación, y de que tipo es. Operaciones básicas: lecturas y escrituras en espacios de memoria y espacios de E/S. Líneas de control de interrupciones. Son las encargadas de hacer llegar al módulo maestro las solicitudes de interrupción de los distintos esclavos: Petición de servicios desde un periférico al procesador. Respuesta del procesador aceptando una petición anterior (reconocimiento). Interrupciones no enmascarables. Interrupciones con prioridad con respecto a las producidas por software desde programa. Líneas de control e intercambio del bus. Son utilizadas en sistemas multiprocesador o con DMA: Petición y aceptación del control del bus. Estado del bus Prioridad asociada. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 28
29 3) Líneas de Sincronización. Las líneas de sincronización están encargadas de: Propagar las señales de temporización básica (clock). Propagar las señales auxiliares para el correcto funcionamiento del computador y sus periféricos (REFRESH para el refresco, etc..) 4) Líneas de Inicialización y Parada. Son las líneas destinadas a: Situar el procesador y los controladores de periféricos en sus condiciones iniciales (inicialización del contador de programa, bits de condición, y comenzar una fase de búsqueda). Detener la secuencia de ejecución del programa (HALT). DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 29
30 5) Líneas de Alimentación. Líneas habituales: +5V, -5V, +12V, -12V y GND. Líneas adicionales para la alimentación expresa de memorias tipo RAM. Estas líneas suministrarán tensiones provenientes de baterías que nos permitirá alimentar las memorias volátiles. Para disminuir la resistencia interna del conductor, generalmente se reservan varias vías para la misma tensión con objeto de disminuir la resistencia interna del conductor. 6) Líneas auxiliares. Son las líneas que suelen estar reservadas por el fabricante para: Funciones diversas y futuras aplicaciones. Líneas a disposición del usuario para su empleo en aplicaciones concretas. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 30
31 1.5.- Prestaciones de los buses El Skew en los buses de alta velocidad Mecanismos de Sincronización. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 31
32 El Skew en los buses de alta velocidad. Premisas de partida: Todas las ranuras son lógica y físicamente equivalentes. Sólo puede haber un maestro en cada instante para transmitir información. Varios esclavos pueden recibir la información a la vez. Skew: Diferencia en el retardo de propagación introducido por dos caminos paralelos. Retraso entre la señal de sincronismo y los bits de los datos. Diferencia entre el máximo y el mínimo retardo en los buffers del bus Ventana de muestreo: Periodo de tiempo en el cual la información es válida en un grupo de líneas del bus. Sincro Entrada Sincro Salida Datos Entrada Datos Salida DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 32
33 Tipos de Skew Todo conjunto de caminos paralelos diferentes introduce skew y disminuye la ventana de muestreo efectiva. Si definimos el skew como la diferencia entre el máximo y el mínimo retardo en los buffers del bus, entonces la ventana de muestreo efectiva de datos se reduce en relación al doble del skew de los buffers. Intermodule skew es la variación del retardo entre diferentes módulos, debido a tensión, temperatura y tiempo. Interdevice skew es la diferencia de tiempo que se establece entre dos componentes de un mismo módulo y por lo tanto bajo similares condiciones de tensión y temperatura. Intradevice skew es la diferencia de tiempo establecida entre dos componentes de un mismo chip. Desgraciadamente el inter e intradevice skew no suele especificarlo el fabricante, por lo que el intermodule skew debe tomarse en el peor de los casos. Intradevice Skew < Interdevice Skew < Intermodule Skew. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 33
34 DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 34
35 Mecanismos de Sincronización. Protocolo Síncrono-Centralizado. Protocolo Forzado (compelled protocol). Protocolo No Forzado (uncompelled protocol). DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 35
36 Protocolo Síncrono-Centralizado. Es el más fácil de implementar. Se ofrece una fuente central de reloj, unas veces desde una circuitería en el backplane y otras desde un módulo instalado en una ranura de éste. Todos los módulos del backplane reciben el reloj central casi simultáneamente. Esta recepción no es totalmente simultánea debida al skew espacial. Éste se introduce a causa de la separación física de los módulos y a la velocidad finita de propagación. El transmisor coloca los datos en el bus tan pronto como le es posible antes del flanco de reloj que los valida. La diferencia entre la ventana de muestreo vista en el transmisor y la vista en el receptor se debe al skew causado por los diferentes retardos de propagación de las distintas señales del backplane. El tiempo mínimo de reloj depende de los retardos absolutos y es prácticamente independiente del skew. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 36
37 Protocolo Síncrono-Centralizado. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 37
38 Protocolo Forzado. La idea que se esconde detrás del protocolo forzado es el que ningún módulo necesita saber explícitamente los requisitos de tiempo de los otros módulos del backplane, pero la velocidad de transferencia de datos se adapta dinámicamente a la velocidad de comunicación de los módulos. No hay sistema de reloj. El tiempo mínimo de reloj depende tanto del skew como de los retardos absolutos. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 38
39 Protocolo No Forzado. Evita el skew espacial pero introduce un retardo por la confirmación del receptor. Este retardo se puede evitar si el receptor pierde el derecho a controlar dinámicamente la velocidad de transferencia. Es bastante similar a un protocolo de sincronismo centralizado, excepto en que la fuente de reloj cambia con el tiempo. Lo que lo diferencia del protocolo forzado es que no se necesita confirmación desde el receptor. Para diseñarlo se debe partir de un retardo máximo que marca el tope de espera para validar los datos en el receptor. El tiempo mínimo de reloj depende del skew y es independiente de los retardos absolutos. DIEA: Integración de Equipos para Comunicaciones. (Tema 1: Introducción a los Buses). Pág. 39
ARQUITECTURA DE LOS SUBSISTEMAS DE BUSES Y ENTRADA/SALIDA
 U C V F A C C I E N C I A S Organización y Estructura del Computador II ARQUITECTURA DE LOS SUBSISTEMAS DE BUSES Y ENTRADA/SALIDA T e m a 2 G D O E C - II S e m e st r e I - 2012 AGENDA Subsistema de Buses
U C V F A C C I E N C I A S Organización y Estructura del Computador II ARQUITECTURA DE LOS SUBSISTEMAS DE BUSES Y ENTRADA/SALIDA T e m a 2 G D O E C - II S e m e st r e I - 2012 AGENDA Subsistema de Buses
Estructura general de una Computadora Arquitectura Estructura Von Neumann
 BUSES Estructura general de una Computadora Arquitectura Estructura Von Neumann Unidad Básica en estructura computador. Cargar programas, ingreso datos, resultados, etc. Estructura de buses BUSES Es un
BUSES Estructura general de una Computadora Arquitectura Estructura Von Neumann Unidad Básica en estructura computador. Cargar programas, ingreso datos, resultados, etc. Estructura de buses BUSES Es un
Integración de Equipos para Comunicaciones
 Integración de Equipos para Comunicaciones Tema 3: Bus XT Aurelio Vega Martínez DIEA: Integración de Equipos para Comunicaciones. (Tema 3: Bus XT). Pág. 1 Introducción. Diseñado en un principio para trabajar
Integración de Equipos para Comunicaciones Tema 3: Bus XT Aurelio Vega Martínez DIEA: Integración de Equipos para Comunicaciones. (Tema 3: Bus XT). Pág. 1 Introducción. Diseñado en un principio para trabajar
ESTRUCTURA DE INTERCONEXIÓN DE UN COMPUTADOR
 ESTRUCTURA DE INTERCONEXIÓN DE UN COMPUTADOR 1 Arquitectura Von Neumann se fundamente en tres ideas: En la memoria del ordenador se almacenan indistintamente datos e instrucciones. Se puede acceder a la
ESTRUCTURA DE INTERCONEXIÓN DE UN COMPUTADOR 1 Arquitectura Von Neumann se fundamente en tres ideas: En la memoria del ordenador se almacenan indistintamente datos e instrucciones. Se puede acceder a la
Tema 7. Entrada / Salida
 Tema 7 Entrada / Salida Problemática Entrada/Salida Elementos claves en un computador: Procesador, memoria y módulos de E/S Cada módulo de E/S se conecta al bus del sistema y controla a uno o a más periféricos
Tema 7 Entrada / Salida Problemática Entrada/Salida Elementos claves en un computador: Procesador, memoria y módulos de E/S Cada módulo de E/S se conecta al bus del sistema y controla a uno o a más periféricos
Periférico: dispositivo que intercambia datos con la UCP o la memoria Problemas:
 5. Interfaz de Entrada / Salida Organización de Entrada / Salida Buses e interfaces de E / S Sistema de E/S y periféricos Periférico: dispositivo que intercambia datos con la UCP o la memoria Problemas:
5. Interfaz de Entrada / Salida Organización de Entrada / Salida Buses e interfaces de E / S Sistema de E/S y periféricos Periférico: dispositivo que intercambia datos con la UCP o la memoria Problemas:
3.1. Buses Y La Transferencia De La Información.
 CUESTIONARIO 3.1. Buses Y La Transferencia De La Información. Carrera: Ingeniería Informática Docente: Ernesto Leal Sánchez Unidad de Aprendizaje: Arquitectura de Computadoras. INTEGRANTES: Mayra Leyva
CUESTIONARIO 3.1. Buses Y La Transferencia De La Información. Carrera: Ingeniería Informática Docente: Ernesto Leal Sánchez Unidad de Aprendizaje: Arquitectura de Computadoras. INTEGRANTES: Mayra Leyva
Arquitectura de Computadoras. Anexo Clase 8 Buses del Sistema
 Arquitectura de Computadoras Anexo Clase 8 Buses del Sistema Estructuras de interconexión Todas las unidades han de estar interconectadas. Existen distintos tipos de interconexiones para los distintos
Arquitectura de Computadoras Anexo Clase 8 Buses del Sistema Estructuras de interconexión Todas las unidades han de estar interconectadas. Existen distintos tipos de interconexiones para los distintos
ARQUITECTURA DE LOS SISTEMAS BASADOS EN MICROPROCESADOR
 ARQUITECTURA DE LOS SISTEMAS BASADOS EN MICROPROCESADOR Historia Bloques funcionales Dimensionamiento Estructura CPU Concepto de programa Interrupciones Buses Entrada / Salida Ejemplo de arquitectura:
ARQUITECTURA DE LOS SISTEMAS BASADOS EN MICROPROCESADOR Historia Bloques funcionales Dimensionamiento Estructura CPU Concepto de programa Interrupciones Buses Entrada / Salida Ejemplo de arquitectura:
EL BUS I2C CARACTERISTICAS. Fernando Remiro
 CARACTERISTICAS Fernando Remiro 1 CARACTERÍSTICAS Utiliza 2 líneas para transportar la información entre los distintos periféricos conectados al bus SDA (datos) SCL (reloj) Cada dispositivo se identifica
CARACTERISTICAS Fernando Remiro 1 CARACTERÍSTICAS Utiliza 2 líneas para transportar la información entre los distintos periféricos conectados al bus SDA (datos) SCL (reloj) Cada dispositivo se identifica
Es un sistema de comunicación que transfiere datos entre una o varias computadoras
 Buses Es un sistema de comunicación que transfiere datos entre una o varias computadoras Podría decirse que un bus son las autopistas y túneles en las que se mueve la información en los dispositivos y
Buses Es un sistema de comunicación que transfiere datos entre una o varias computadoras Podría decirse que un bus son las autopistas y túneles en las que se mueve la información en los dispositivos y
Introducción a las Computadoras. Capítulo 3 Buses del Sistema
 Introducción a las Computadoras Capítulo 3 Buses del Sistema Concepto de Programa Los sistemas de propósito específico no son flexibles El Hardware de propósito general puede realizar diferentes tareas,
Introducción a las Computadoras Capítulo 3 Buses del Sistema Concepto de Programa Los sistemas de propósito específico no son flexibles El Hardware de propósito general puede realizar diferentes tareas,
Interfaces de Entrada / Salida
 4-1 Interfaces de Entrada / Salida Familia de Circuitos que permiten adaptar, leer y/o gobernar señales externas desde y hacia un sistema microprocesador 4-2 1 Tipos de Entradas / Salidas A) Formato de
4-1 Interfaces de Entrada / Salida Familia de Circuitos que permiten adaptar, leer y/o gobernar señales externas desde y hacia un sistema microprocesador 4-2 1 Tipos de Entradas / Salidas A) Formato de
Arquitectura de computadores I
 Arquitectura de computadores I Perspectiva de alto nivel de los computadores Septiembre de 2017 Contenido Componentes del computador Funcionamiento del computador Estructuras de interconexión Interconexión
Arquitectura de computadores I Perspectiva de alto nivel de los computadores Septiembre de 2017 Contenido Componentes del computador Funcionamiento del computador Estructuras de interconexión Interconexión
Señales de interfase del Z80
 Señales de interfase del Z80 El microprocesador Z80 está integrado en una pastilla de 40 pines. Estos terminales pueden agruparse funcionalmente como muestra la figura: Bus de direcciones El bus de direcciones
Señales de interfase del Z80 El microprocesador Z80 está integrado en una pastilla de 40 pines. Estos terminales pueden agruparse funcionalmente como muestra la figura: Bus de direcciones El bus de direcciones
EVOLUCIÓN HISTÓRICA DE LOS µp
 EVOLUCIÓN HISTÓRICA DE LOS µp El primer procesador fue inventado por los Babilonios en el año 500 ac En 1642 se perfeccionó la primera calculadora por Blas Pascal A mediados del siglo pasado se inventaron
EVOLUCIÓN HISTÓRICA DE LOS µp El primer procesador fue inventado por los Babilonios en el año 500 ac En 1642 se perfeccionó la primera calculadora por Blas Pascal A mediados del siglo pasado se inventaron
Comunicación Serial: Conceptos Generales
 Comunicación Serial: Conceptos Generales Conceptos Generales Qué es la comunicación serial? Qué es RS-232? Qué es RS-422? Qué es RS-485? Qué es handshaking (o intercambio de pulsos de sincronización)?
Comunicación Serial: Conceptos Generales Conceptos Generales Qué es la comunicación serial? Qué es RS-232? Qué es RS-422? Qué es RS-485? Qué es handshaking (o intercambio de pulsos de sincronización)?
Tema 6. El sistema de entrada-salida
 Enunciados de problemas Tema 6. El sistema de entrada-salida Arquitectura de Computadores Curso 2009-2010 Tema 6: Hoja: 2 / 21 Tema 6: Hoja: 3 / 21 Base teórica Al diseñar un computador, uno de los puntos
Enunciados de problemas Tema 6. El sistema de entrada-salida Arquitectura de Computadores Curso 2009-2010 Tema 6: Hoja: 2 / 21 Tema 6: Hoja: 3 / 21 Base teórica Al diseñar un computador, uno de los puntos
BLOQUE I. Introducción a la Telemática
 BLOQUE I. Introducción a la Telemática REDES DE DIFUSIÓN Y REDES DE CONMUTACIÓN (I). María Dolores Cano Baños Contenidos 1. Introducción 2. Cambios en los factores tecnológicos, organizativos y económicos
BLOQUE I. Introducción a la Telemática REDES DE DIFUSIÓN Y REDES DE CONMUTACIÓN (I). María Dolores Cano Baños Contenidos 1. Introducción 2. Cambios en los factores tecnológicos, organizativos y económicos
Microprocesador. Introducción. Instituto Sagrado Corazón de Jesús
 Microprocesador Introducción El microprocesador es la parte de la computadora diseñada para llevar acabo o ejecutar los programas. Este viene siendo el cerebro de la computadora, el motor, el corazón de
Microprocesador Introducción El microprocesador es la parte de la computadora diseñada para llevar acabo o ejecutar los programas. Este viene siendo el cerebro de la computadora, el motor, el corazón de
PROBLEMAS TEMA 1: Estructuras de interconexión de un computador
 PROBLEMAS TEMA 1: Estructuras de interconexión de un computador Problemas propuestos en examen 1.1 Una CPU que emplea un tamaño de palabra de 16 bits tiene un repertorio de 16 instrucciones con un formato
PROBLEMAS TEMA 1: Estructuras de interconexión de un computador Problemas propuestos en examen 1.1 Una CPU que emplea un tamaño de palabra de 16 bits tiene un repertorio de 16 instrucciones con un formato
3 Interfaz PC DSP. 3.1 Introducción a las comunicaciones serie. 3 Interfaz PC DSP
 3 Interfaz PC DSP 3.1 Introducción a las comunicaciones serie Las comunicaciones serie se utilizan para enviar datos a través de largas distancias, ya que las comunicaciones en paralelo exigen demasiado
3 Interfaz PC DSP 3.1 Introducción a las comunicaciones serie Las comunicaciones serie se utilizan para enviar datos a través de largas distancias, ya que las comunicaciones en paralelo exigen demasiado
Integración de Equipos para Comunicaciones Tema2: Buses Industriales Normalizados
 Integración de Equipos para Comunicaciones Tema2: Buses Industriales Normalizados Aurelio Vega Martínez DIEA: Integración de Equipos para Comunicaciones. (Tema 2º ). Pág. 1 1.- Indice. 2.1.- Introducción
Integración de Equipos para Comunicaciones Tema2: Buses Industriales Normalizados Aurelio Vega Martínez DIEA: Integración de Equipos para Comunicaciones. (Tema 2º ). Pág. 1 1.- Indice. 2.1.- Introducción
Vista de Alto Nivel del Funcionamiento del Computador Interconectividad
 Vista de Alto Nivel del Funcionamiento del Computador Interconectividad Del capítulo 3 del libro Organización y Arquitectura de Computadores William Stallings Concepto de Programa Sistemas cableados son
Vista de Alto Nivel del Funcionamiento del Computador Interconectividad Del capítulo 3 del libro Organización y Arquitectura de Computadores William Stallings Concepto de Programa Sistemas cableados son
Introducción a la Computación. Capítulo 7 Entrada/Salida
 Introducción a la Computación Capítulo 7 Entrada/Salida Problemas Entrada/Salida Existe una amplia variedad periféricos Se les entrega distintas cantidades de datos Funcionan a distintas velocidades Tienen
Introducción a la Computación Capítulo 7 Entrada/Salida Problemas Entrada/Salida Existe una amplia variedad periféricos Se les entrega distintas cantidades de datos Funcionan a distintas velocidades Tienen
MULTIPROCESADORES MODELOS DE INTERCONEXIÓN
 Todos los derechos de propiedad intelectual de esta obra pertenecen en exclusiva a la Universidad Europea de Madrid, S.L.U. Queda terminantemente prohibida la reproducción, puesta a disposición del público
Todos los derechos de propiedad intelectual de esta obra pertenecen en exclusiva a la Universidad Europea de Madrid, S.L.U. Queda terminantemente prohibida la reproducción, puesta a disposición del público
Consiste en un conjunto de circuitos impresos y conectores integrados en una única placa donde se alojan todos los componentes internos del ordenador
 LA PLACA MADRE Consiste en un conjunto de circuitos impresos y conectores integrados en una única placa donde se alojan todos los componentes internos del ordenador como el procesador, la caché de segundo
LA PLACA MADRE Consiste en un conjunto de circuitos impresos y conectores integrados en una única placa donde se alojan todos los componentes internos del ordenador como el procesador, la caché de segundo
REDES TOPOLOGICAS PRESENTADO POR : JUAN SEBASTIAN PLAZAS MANCHOLA
 REDES TOPOLOGICAS PRESENTADO POR : JUAN SEBASTIAN PLAZAS MANCHOLA CONCEPTO Mapa físico o lógico de una red para intercambiar datos. En otras palabras, es la forma en que está diseñada la red, sea en el
REDES TOPOLOGICAS PRESENTADO POR : JUAN SEBASTIAN PLAZAS MANCHOLA CONCEPTO Mapa físico o lógico de una red para intercambiar datos. En otras palabras, es la forma en que está diseñada la red, sea en el
TEMA III. Unidad de entrada salida
 TEMA III Unidad de entrada salida 3.1 Dispositivos externos 3.2 Controlador de E/S 3.2.1 Funciones del controlador de E/S 3.2.2 Estructura del controlador de E/S 3.2.3 Estructura del sistema de E/S 3.3
TEMA III Unidad de entrada salida 3.1 Dispositivos externos 3.2 Controlador de E/S 3.2.1 Funciones del controlador de E/S 3.2.2 Estructura del controlador de E/S 3.2.3 Estructura del sistema de E/S 3.3
Arquitectura de Computadoras 2011
 07/06/ Arquitectura de Computadoras Entrada/Salida Mediante Interrupciones E/S mediante interrupciones La CPU no tiene que esperar la finalización de la tarea de E/S, puede seguir procesando. No se repite
07/06/ Arquitectura de Computadoras Entrada/Salida Mediante Interrupciones E/S mediante interrupciones La CPU no tiene que esperar la finalización de la tarea de E/S, puede seguir procesando. No se repite
Velocidades Típicas de transferencia en Dispositivos I/O
 Entradas Salidas Velocidades Típicas de transferencia en Dispositivos I/O Entradas/Salidas: Problemas Amplia variedad de periféricos Entrega de diferentes cantidades de datos Diferentes velocidades Variedad
Entradas Salidas Velocidades Típicas de transferencia en Dispositivos I/O Entradas/Salidas: Problemas Amplia variedad de periféricos Entrega de diferentes cantidades de datos Diferentes velocidades Variedad
Unidad 2 La red informática
 5.- DISEÑO DE UNA RED Al diseñar una red hemos de establecer los siguientes elementos: Arquitectura de red: hace referencia a la estructura física de la red. En redes de área local se utilizan varios tipos
5.- DISEÑO DE UNA RED Al diseñar una red hemos de establecer los siguientes elementos: Arquitectura de red: hace referencia a la estructura física de la red. En redes de área local se utilizan varios tipos
Sincronismo de Canales
 Sincronismo de Canales Los protocolos de transferencia de información en canales de microprocesadores, se pueden clasificar en tres grupos: 1. Sincrónicos: transferencias sincronizadas, una transferencia
Sincronismo de Canales Los protocolos de transferencia de información en canales de microprocesadores, se pueden clasificar en tres grupos: 1. Sincrónicos: transferencias sincronizadas, una transferencia
Arquitectura de Computadoras 2011
 Arquitectura de Computadoras Unidad 7: Acceso Directo a Memoria (DMA)U Acceso directo a memoria (DMA) Las operaciones de E/S mediante interrupciones son más efectivas que las programadas. Pero ambas necesitan
Arquitectura de Computadoras Unidad 7: Acceso Directo a Memoria (DMA)U Acceso directo a memoria (DMA) Las operaciones de E/S mediante interrupciones son más efectivas que las programadas. Pero ambas necesitan
(7) Unidad 7. Buses básicos de la arquitectura 80x86 SISTEMAS BASADOS EN MICROPROCESADORES. Grado en Ingeniería Informática EPS - UAM
 Unidad 7. Buses básicos de la arquitectura 80x86 SISTEMAS BASADOS EN MICROPROCESADORES. Grado en Ingeniería Informática EPS - UAM") Unidad 7 Buses básicos de la arquitectura 80x86 SISTEMAS BASADOS EN MICROPROCESADORES Grado en Ingeniería Informática EPS - UAM Índice 7. Buses básicos de la arquitectura 80x86. 7.1. La importancia de
Unidad 7 Buses básicos de la arquitectura 80x86 SISTEMAS BASADOS EN MICROPROCESADORES Grado en Ingeniería Informática EPS - UAM Índice 7. Buses básicos de la arquitectura 80x86. 7.1. La importancia de
Configuración. Tipos de procesadores en la CPU
 Configuración Unidad de control (UC) o Arquitectura de las tarjetas o Arquitectura del sistema o Redundancia Sistemas de E/S Sistemas de Memoria masiva Tipos de procesadores en la CPU Varios procesadores
Configuración Unidad de control (UC) o Arquitectura de las tarjetas o Arquitectura del sistema o Redundancia Sistemas de E/S Sistemas de Memoria masiva Tipos de procesadores en la CPU Varios procesadores
4. Tarjeta de control
 4. Tarjeta de control 4.1. Características Esta tarjeta permite conectar cualquier microcontrolador del mercado al resto de tarjetas esclavo. Como se detalla en la sección 2 de este documento (Bus de Intercomunicación),
4. Tarjeta de control 4.1. Características Esta tarjeta permite conectar cualquier microcontrolador del mercado al resto de tarjetas esclavo. Como se detalla en la sección 2 de este documento (Bus de Intercomunicación),
3. Topologías 3.1 En canal.
 3. Topologías Los diferentes componentes que van a formar una red se pueden interconectar o unir de diferentes maneras, siendo la forma seleccionada una factor determinante del rendimiento y funcionalidad
3. Topologías Los diferentes componentes que van a formar una red se pueden interconectar o unir de diferentes maneras, siendo la forma seleccionada una factor determinante del rendimiento y funcionalidad
Daivid Moras Hernando
 Daivid Moras Hernando ÍNDICE LOS PERIFÉRICOS Periférico es todo componente hardware que no forma parte (o que no tiene parte esencial) de el PC (placa base, CPU, RAM, HDD/Disquetera). Estos sirven para
Daivid Moras Hernando ÍNDICE LOS PERIFÉRICOS Periférico es todo componente hardware que no forma parte (o que no tiene parte esencial) de el PC (placa base, CPU, RAM, HDD/Disquetera). Estos sirven para
Tema II. Unidad de memoria
 Tema II Unidad de memoria 2 Unidad de memoria 2.1 Definiciones y conceptos básicos 2.1.1 Localización 2.1.2 Capacidad 2.1.3 Unidad de transferencia 2.1.4 Método de acceso 2.1.5 Tipos físicos 2.1.6 Características
Tema II Unidad de memoria 2 Unidad de memoria 2.1 Definiciones y conceptos básicos 2.1.1 Localización 2.1.2 Capacidad 2.1.3 Unidad de transferencia 2.1.4 Método de acceso 2.1.5 Tipos físicos 2.1.6 Características
Transmisión de Datos Rubiel Leal Bernal Ing. De Sistemas Universidad de Nariño
 Transmisión de Datos Rubiel Leal Bernal Ing. De Sistemas Universidad de Nariño Universidad de Nariño - Rubiel Leal B. 1 TRANSMISION DE DATOS El éxito de la transmisión de datos depende de 2 factores: Calidad
Transmisión de Datos Rubiel Leal Bernal Ing. De Sistemas Universidad de Nariño Universidad de Nariño - Rubiel Leal B. 1 TRANSMISION DE DATOS El éxito de la transmisión de datos depende de 2 factores: Calidad
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Ing. Guillermo Murcia Ing. Jorge Luis Strack gjmurcia@fi.mdp.edu.ar jlstrack@fi.mdp.edu.ar Lecto-grabadora de SDcard - Se comunica con Arduino a través del protocolo de comunicación SPI. - Se comanda a
Ing. Guillermo Murcia Ing. Jorge Luis Strack gjmurcia@fi.mdp.edu.ar jlstrack@fi.mdp.edu.ar Lecto-grabadora de SDcard - Se comunica con Arduino a través del protocolo de comunicación SPI. - Se comanda a
Tema 4: SISTEMAS DE ENTRADA/SALIDA. Un computador no puede estar formado sólo por la CPU y la memoria.
 Tema 4: SISTEMAS DE ENTRADA/SALIDA ÍNDICE 1. Introducción. 2. Módulos de Entrada/Salida: comunicación CPU - Periféricos. 3. Mapa de Entrada/Salida: común y separada. 4. Introducción a los métodos de programación
Tema 4: SISTEMAS DE ENTRADA/SALIDA ÍNDICE 1. Introducción. 2. Módulos de Entrada/Salida: comunicación CPU - Periféricos. 3. Mapa de Entrada/Salida: común y separada. 4. Introducción a los métodos de programación
Buses. Organización del Computador I. David Alejandro González Márquez
 Buses Organización del Computador I David Alejandro González Márquez Departamento de Computación Facultad de Ciencias Exactas y Naturales Universidad de Buenos Aires 27.02.2015 Agenda Introducción Tipos
Buses Organización del Computador I David Alejandro González Márquez Departamento de Computación Facultad de Ciencias Exactas y Naturales Universidad de Buenos Aires 27.02.2015 Agenda Introducción Tipos
CURSO DE TÉCNICO EN SEGURIDAD DE REDES Y SISTEMAS TEMA 2: COMPONENTES DE LAS REDES JOSÉ MARÍA TORRES CORRAL 03/03/2011
 CURSO DE TÉCNICO EN SEGURIDAD DE REDES Y SISTEMAS TEMA 2: COMPONENTES DE LAS REDES JOSÉ MARÍA TORRES CORRAL 03/03/2011 1 Tarjeta de red y opciones de configuración. Repetidores y amplificadores. Concentradores
CURSO DE TÉCNICO EN SEGURIDAD DE REDES Y SISTEMAS TEMA 2: COMPONENTES DE LAS REDES JOSÉ MARÍA TORRES CORRAL 03/03/2011 1 Tarjeta de red y opciones de configuración. Repetidores y amplificadores. Concentradores
Nota Técnica Conceptos básicos para establecer un Enlace Serie Inalámbrico
 Nota Técnica Conceptos básicos para establecer un Enlace Serie Inalámbrico 1. Generalidades En esta nota técnica se busca enumerar los conceptos báscios de cualquier comunicación serie y luego mostrar
Nota Técnica Conceptos básicos para establecer un Enlace Serie Inalámbrico 1. Generalidades En esta nota técnica se busca enumerar los conceptos báscios de cualquier comunicación serie y luego mostrar
PANORAMA GENERAL DE LOS µc
 PANORAMA GENERAL DE LOS µc Sistemas Digitales II Este tipo de dispositivos en la actualidad se encuentran en los supermercados, artículos electrodomésticos, instrumentos musicales, juguetes, equipo automotriz
PANORAMA GENERAL DE LOS µc Sistemas Digitales II Este tipo de dispositivos en la actualidad se encuentran en los supermercados, artículos electrodomésticos, instrumentos musicales, juguetes, equipo automotriz
UNIDAD VII CONMUTACIÓN DE CIRCUITOS Y DE PAQUETES.
 UNIDAD VII CONMUTACIÓN DE CIRCUITOS Y DE PAQUETES. 7.1 Introducción. En las redes conmutadas de área amplia (WAN) se emplean dos tecnologías diferentes: conmutación de circuitos y conmutación de paquetes.
UNIDAD VII CONMUTACIÓN DE CIRCUITOS Y DE PAQUETES. 7.1 Introducción. En las redes conmutadas de área amplia (WAN) se emplean dos tecnologías diferentes: conmutación de circuitos y conmutación de paquetes.
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Ejercicio: construir un datalogger El datalogger o registrador debe sensar la temperatura ambiente cada 1s y guardarla junto a la fecha y hora de adquisición en un archivo.txt alojado en una memoria µsd.
Ejercicio: construir un datalogger El datalogger o registrador debe sensar la temperatura ambiente cada 1s y guardarla junto a la fecha y hora de adquisición en un archivo.txt alojado en una memoria µsd.
6. Entrada y Salida Explicación de la interfaz entre el computador y el mundo exterior.
 6. Entrada y Salida Explicación de la interfaz entre el computador y el mundo exterior. 6.1. El subsistema de E/S Qué es E/S en un sistema computador? Aspectos en el diseño del subsistema de E/S: localización
6. Entrada y Salida Explicación de la interfaz entre el computador y el mundo exterior. 6.1. El subsistema de E/S Qué es E/S en un sistema computador? Aspectos en el diseño del subsistema de E/S: localización
Informática. Informática = Hardware + Software. Hardware + Software. Hardware = Parte física. Software = Parte lógica
 Informática Hardware + Software Informática = Hardware + Software Hardware = Parte física Software = Parte lógica 1 Hardware ELEMENTOS DE UN ORDENADOR CPU (microprocesador) Unidad aritmético-lógica Unidad
Informática Hardware + Software Informática = Hardware + Software Hardware = Parte física Software = Parte lógica 1 Hardware ELEMENTOS DE UN ORDENADOR CPU (microprocesador) Unidad aritmético-lógica Unidad
Bus I 2 C. Introducción
 Bus I 2 C Introducción 1980: Philips desarrolla el Bus de 2 alambres I 2 C para la comunicación de circuitos integrados. Se han otorgado licencias a mas de 50 compañías, encontrándonos con más de 1000
Bus I 2 C Introducción 1980: Philips desarrolla el Bus de 2 alambres I 2 C para la comunicación de circuitos integrados. Se han otorgado licencias a mas de 50 compañías, encontrándonos con más de 1000
CONMUTACIÓN DIGITAL Contenido
 CONMUTACIÓN DIGITAL Contenido 1.- Introducción. 2.- Equipo de conmutación. 3.- Abonados y enlaces. 4.- Red de conexión. 5.- Unidad de control. 6.- Conmutador espacial S. 7.- Conmutador temporal T. 8.-
CONMUTACIÓN DIGITAL Contenido 1.- Introducción. 2.- Equipo de conmutación. 3.- Abonados y enlaces. 4.- Red de conexión. 5.- Unidad de control. 6.- Conmutador espacial S. 7.- Conmutador temporal T. 8.-
Tema 3. Características y protocolos de los buses
 Estructura y Tecnología de Computadores Módulo C. Buses del computador Tema 3. Características y protocolos de los buses CONTENIDOS 1. Introducción Definición de bus. Modo de operación. Parámetros de caracterización.
Estructura y Tecnología de Computadores Módulo C. Buses del computador Tema 3. Características y protocolos de los buses CONTENIDOS 1. Introducción Definición de bus. Modo de operación. Parámetros de caracterización.
FUNDAMENTOS DE COMPUTADORES BUSES I
 Todos los derechos de propiedad intelectual de esta obra pertenecen en exclusiva a la Universidad Europea de Madrid, S.L.U. Queda terminantemente prohibida la reproducción, puesta a disposición del público
Todos los derechos de propiedad intelectual de esta obra pertenecen en exclusiva a la Universidad Europea de Madrid, S.L.U. Queda terminantemente prohibida la reproducción, puesta a disposición del público
Introducción a los sistemas de entrada/salida Profesores y tutorías
 Introducción a los sistemas de entrada/salida Profesores y tutorías Teoría: Daniel Cascado Caballero Despacho: F070 Horario de tutorías: Lunes: 17:30h a 19:30h Martes: 12:30h a 13:30h Jueves: 10:30h a
Introducción a los sistemas de entrada/salida Profesores y tutorías Teoría: Daniel Cascado Caballero Despacho: F070 Horario de tutorías: Lunes: 17:30h a 19:30h Martes: 12:30h a 13:30h Jueves: 10:30h a
Protocolos de Telecomunicaciones Capa Física y Capa de Enlace de datos. Semana 2
 Protocolos de Telecomunicaciones Capa Física y Capa de Enlace de datos Semana 2 La capa física controla de qué manera se ubican los datos en los medios de comunicación. La función de la capa física de
Protocolos de Telecomunicaciones Capa Física y Capa de Enlace de datos Semana 2 La capa física controla de qué manera se ubican los datos en los medios de comunicación. La función de la capa física de
Tutoría 2. Banco de memoria de 8 y 16 bits (8086)
") Tutoría 2. Banco de memoria de 8 y 16 bits (8086) RESUMEN Cuando el procesador opera en modo mínimo, éste genera las señales de control para la memoria y los dispositivos de E/S. [1, pág. 292]. Para utilizar
Tutoría 2. Banco de memoria de 8 y 16 bits (8086) RESUMEN Cuando el procesador opera en modo mínimo, éste genera las señales de control para la memoria y los dispositivos de E/S. [1, pág. 292]. Para utilizar
BUS DE COMUNICACIÓN I 2 C
 APÉNDICE H BUS DE COMUNICACIÓN I 2 C El término I 2 C da nombre a un estándar para bus de comunicaciones serie. El nombre proviene de Inter-Integrated Circuits. El diseñador es el fabricante Philips. Existen
APÉNDICE H BUS DE COMUNICACIÓN I 2 C El término I 2 C da nombre a un estándar para bus de comunicaciones serie. El nombre proviene de Inter-Integrated Circuits. El diseñador es el fabricante Philips. Existen
Redes de Área Local. Arquitectura de una LAN. Tema 2. Medio. Medio. E.T.S.I. Telecomunicación Sonido e Imagen. Aplicaciones en Redes Locales.
 Redes de Área Local Tema 2 Aplicaciones en Redes Locales E.T.S.I. Telecomunicación Sonido e Imagen Arquitectura de una LAN Modelo de Referencia IEEE 802 Protocolos de capa superior Red Enlace de Datos
Redes de Área Local Tema 2 Aplicaciones en Redes Locales E.T.S.I. Telecomunicación Sonido e Imagen Arquitectura de una LAN Modelo de Referencia IEEE 802 Protocolos de capa superior Red Enlace de Datos
Electrónica Digital II
 Electrónica Digital II TIPOS DE MEMORIAS MEMORIA DDR MEMORIA DDR2 MEMORIA DDR3 COMPARACIÓN TIEMPOS DE ACCESO TIPOS DE LATENCIAS RAS CAS ACTIVIDAD PRECARGA TIPOS DE CONFIGURACIONES SINGLE CHANNEL DUAL CHANNEL
Electrónica Digital II TIPOS DE MEMORIAS MEMORIA DDR MEMORIA DDR2 MEMORIA DDR3 COMPARACIÓN TIEMPOS DE ACCESO TIPOS DE LATENCIAS RAS CAS ACTIVIDAD PRECARGA TIPOS DE CONFIGURACIONES SINGLE CHANNEL DUAL CHANNEL
Redes (9359). Curso Ingeniería Técnica en Informática de Sistemas (plan 2001)
. Curso Ingeniería Técnica en Informática de Sistemas (plan 2001)") La fuente original de gran parte de las imágenes presentadas en esta lección son cortesía del texto docente Redes y Transmisión de Datos P. Gil, J. Pomares, F. Candelas. Servicio de Publicaciones Universidad
La fuente original de gran parte de las imágenes presentadas en esta lección son cortesía del texto docente Redes y Transmisión de Datos P. Gil, J. Pomares, F. Candelas. Servicio de Publicaciones Universidad
ENTRADA-SALIDA. 2. Dispositivos de Carácter: Envía o recibe un flujo de caracteres No es direccionable, no tiene operación de búsqueda
 Tipos de Dispositivos ENTRADA-SALIDA 1. Dispositivos de Bloque: Almacena información en bloques de tamaño fijo (512b hasta 32Kb) Se puede leer o escribir un bloque en forma independiente 2. Dispositivos
Tipos de Dispositivos ENTRADA-SALIDA 1. Dispositivos de Bloque: Almacena información en bloques de tamaño fijo (512b hasta 32Kb) Se puede leer o escribir un bloque en forma independiente 2. Dispositivos
El comienzo del protocolo CAN (CONTROLLER AREA NETWORK) Laboratorio de Automatización II. UNQ PROTOCOLO CAN 1
 Laboratorio de Automatización II. UNQ PROTOCOLO CAN 1") El comienzo del protocolo CAN (CONTROLLER AREA NETWORK) Laboratorio de Automatización II. UNQ PROTOCOLO CAN 1 El comienzo del protocolo CAN Laboratorio de Automatización II. UNQ PROTOCOLO CAN 2 DESCRIPCIÓN
El comienzo del protocolo CAN (CONTROLLER AREA NETWORK) Laboratorio de Automatización II. UNQ PROTOCOLO CAN 1 El comienzo del protocolo CAN Laboratorio de Automatización II. UNQ PROTOCOLO CAN 2 DESCRIPCIÓN
Arquitectura de Computadoras
 Arquitectura de Computadoras Arquitecturas Von Neumann Harvard Otras (Multiprocesador, Sistemas distribuidos) Arquitectura de Computadores Corresponde a la estructura, organización, e interconexión de
Arquitectura de Computadoras Arquitecturas Von Neumann Harvard Otras (Multiprocesador, Sistemas distribuidos) Arquitectura de Computadores Corresponde a la estructura, organización, e interconexión de
TEMA 6.- INTERFACES PARA DISCOS DUROS. nexo de conexión que facilita la comunicación entre dos dispositivos
 TEMA 6.- INTERFACES PARA DISCOS DUROS 1. Introducción Interfaz: Adaptador: nexo de conexión que facilita la comunicación entre dos dispositivos convierte las señales del computador a las que necesita el
TEMA 6.- INTERFACES PARA DISCOS DUROS 1. Introducción Interfaz: Adaptador: nexo de conexión que facilita la comunicación entre dos dispositivos convierte las señales del computador a las que necesita el
TEMA 12: MEJORA DE LAS PRESTACIONES DE LA MEMORIA
 TEMA 12: MEJORA DE LAS PRESTACIONES DE LA MEMORIA PRINCIPAL. 1. Introducción. 2. Aumentar el ancho de la memoria. 3. Memoria entrelazada. 4. Bancos de memoria independientes. 5. Tecnología de las memorias.
TEMA 12: MEJORA DE LAS PRESTACIONES DE LA MEMORIA PRINCIPAL. 1. Introducción. 2. Aumentar el ancho de la memoria. 3. Memoria entrelazada. 4. Bancos de memoria independientes. 5. Tecnología de las memorias.
VOCABULARIO DEL HARDWARE. Docente Yeni Ávila
 VOCABULARIO DEL HARDWARE Docente Yeni Ávila HARDWARE El Hardware Básico: son las piezas fundamentales e imprescindibles para que la computadora funcione como son: Placa base, monitor, teclado y ratón.
VOCABULARIO DEL HARDWARE Docente Yeni Ávila HARDWARE El Hardware Básico: son las piezas fundamentales e imprescindibles para que la computadora funcione como son: Placa base, monitor, teclado y ratón.
Arquitectura de un Controlador Electrónico de Procesos
 Arquitectura de un Controlador Electrónico de Procesos Unidad Central de Procesamiento (CPU) La unidad central de procesamiento es el elemento más importante de un controlador electrónico de procesos.
Arquitectura de un Controlador Electrónico de Procesos Unidad Central de Procesamiento (CPU) La unidad central de procesamiento es el elemento más importante de un controlador electrónico de procesos.
1. Definición de Teleinformática Es la unión entre las Telecomunicaciones y la Informática. Es la ciencia que trata la conectabilidad y comunicación a
 Introducción a la Teleinformatica 1. Definición de Teleinformática Es la unión entre las Telecomunicaciones y la Informática. Es la ciencia que trata la conectabilidad y comunicación a distancia entre
Introducción a la Teleinformatica 1. Definición de Teleinformática Es la unión entre las Telecomunicaciones y la Informática. Es la ciencia que trata la conectabilidad y comunicación a distancia entre
2º Cuatrimestre MÓDULO 12: Introducción al Subsistema de Entrada/Salida. fc 2
 2º Cuatrimestre 2012 2013 MÓDULO 12: Introducción al Subsistema de Entrada/Salida 1 CPU MEMORIA El código/datos de una aplicación debe estar en memoria pero cómo llega allí? Dónde está almacenado el fichero
2º Cuatrimestre 2012 2013 MÓDULO 12: Introducción al Subsistema de Entrada/Salida 1 CPU MEMORIA El código/datos de una aplicación debe estar en memoria pero cómo llega allí? Dónde está almacenado el fichero
Unidad 2: Taller de Cómputo. Estructura y Componentes de la Computadora UNIDAD DOS: INTRODUCCIÓN
 UNIDAD DOS: INTRODUCCIÓN Una computadora es una máquina electrónica diseñada para manipular y procesar información de acuerdo a un conjunto de ordenes o programas. para que esto sea posible se requiere
UNIDAD DOS: INTRODUCCIÓN Una computadora es una máquina electrónica diseñada para manipular y procesar información de acuerdo a un conjunto de ordenes o programas. para que esto sea posible se requiere
Motherboard. Daniel Rúa Madrid
 Motherboard Daniel Rúa Madrid Qué es? La Motherboard es la placa principal de circuitos impresos y contiene los buses, que permiten que los datos sean transportados entre los diferentes componentes de
Motherboard Daniel Rúa Madrid Qué es? La Motherboard es la placa principal de circuitos impresos y contiene los buses, que permiten que los datos sean transportados entre los diferentes componentes de
Contenidos. Arquitectura de ordenadores (fundamentos teóricos) Elementos de un ordenador. Periféricos
 Elementos de un ordenador. Periféricos") Arquitectura de ordenadores (fundamentos teóricos) Representación de la información Estructura de un microprocesador Memorias Sistemas de E/S Elementos de un ordenador Microprocesador Placa base Chipset
Arquitectura de ordenadores (fundamentos teóricos) Representación de la información Estructura de un microprocesador Memorias Sistemas de E/S Elementos de un ordenador Microprocesador Placa base Chipset
BUSES. Una comunicación compartida Un conjunto de cables para comunicar múltiples subsistemas. Memoria
 BUSES UPCO ICAI Departamento de Electrónica y Automática 1 Qué es un bus? Una comunicación compartida Un conjunto de cables para comunicar múltiples subsistemas Procesador Control Datapath Memoria Entrada
BUSES UPCO ICAI Departamento de Electrónica y Automática 1 Qué es un bus? Una comunicación compartida Un conjunto de cables para comunicar múltiples subsistemas Procesador Control Datapath Memoria Entrada
AUTÓMATAS PROGRAMABLES. Regulación Automática II. Antonio Robles Álvarez. Índice
 AUTÓMATAS PROGRAMABLES Antonio Robles Álvarez 1 Índice Introducción Estructura de un Autómata Programable Modos de operación Ciclo de funcionamiento Elementos de proceso rápido Configuración El estándar
AUTÓMATAS PROGRAMABLES Antonio Robles Álvarez 1 Índice Introducción Estructura de un Autómata Programable Modos de operación Ciclo de funcionamiento Elementos de proceso rápido Configuración El estándar
PROTOCOLO DE COMUNICACIÓN CAN (CONTROLLER AREA NETWORK)
") XX Congreso Argentino de Control Automático AADECA 2006 PROTOCOLO DE COMUNICACIÓN CAN (CONTROLLER AREA NETWORK) Ing. Roberto Saco email: rsaco@unq.edu.ar / rsaco@fi.uba.ar 1 El comienzo del protocolo CAN
XX Congreso Argentino de Control Automático AADECA 2006 PROTOCOLO DE COMUNICACIÓN CAN (CONTROLLER AREA NETWORK) Ing. Roberto Saco email: rsaco@unq.edu.ar / rsaco@fi.uba.ar 1 El comienzo del protocolo CAN
06/10/2010. E/S por interrupciones. Problemática. Conexión de varias periféricos. Operación con múltiples periféricos
 E/S por interrupciones Operación con múltiples periféricos AC: Sistema de E/S 39 Problemática Conexionado Identificación del solicitante Localización de la rutina de servicio correspondiente Prioridades
E/S por interrupciones Operación con múltiples periféricos AC: Sistema de E/S 39 Problemática Conexionado Identificación del solicitante Localización de la rutina de servicio correspondiente Prioridades
Universidad de Los Andes Facultad de Ciencia Forestales y Ambientales Escuela de Ingeniería Forestal
 Universidad de Los Andes Facultad de Ciencia Forestales y Ambientales Escuela de Ingeniería Forestal Redes Tema5. Informática. Régimen Anualidad Prof. Kuong-F Chang. Mérida, Marzo 2016 Redes Concepto Una
Universidad de Los Andes Facultad de Ciencia Forestales y Ambientales Escuela de Ingeniería Forestal Redes Tema5. Informática. Régimen Anualidad Prof. Kuong-F Chang. Mérida, Marzo 2016 Redes Concepto Una
Estructura básica de un ordenador
 Estructura básica de un ordenador CPU.Unidad Central de proceso Memoria Naturaleza electrónica, Microprocesador Controlar y coordinar todas las operaciones del sistema Ejecuta instrucciones de programas»
Estructura básica de un ordenador CPU.Unidad Central de proceso Memoria Naturaleza electrónica, Microprocesador Controlar y coordinar todas las operaciones del sistema Ejecuta instrucciones de programas»
Enlaces Seriales UART, I2C, SPI
 Comunicaciones, Enlaces Seriales UART, I2C, SPI (Preparen Papel y Lápiz) Diagrama de Bloques Fecha y Hora Entradas Procesamiento Procesamiento Comunicación Comunicación Universidad TransmisiónNacional
Comunicaciones, Enlaces Seriales UART, I2C, SPI (Preparen Papel y Lápiz) Diagrama de Bloques Fecha y Hora Entradas Procesamiento Procesamiento Comunicación Comunicación Universidad TransmisiónNacional
Topologías de red. Topología de bus
 Topologíasdered Por: Roberto Rangel Las redes pueden clasificarse de acuerdo a su topología lógica y su topología física. Las principales topologías que pueden implementarse en una red de computadoras
Topologíasdered Por: Roberto Rangel Las redes pueden clasificarse de acuerdo a su topología lógica y su topología física. Las principales topologías que pueden implementarse en una red de computadoras
UART. Diseño de Sistemas con FPGA 1er cuatrimestre 2013 Patricia Borensztejn
 UART Diseño de Sistemas con FPGA 1er cuatrimestre 2013 Patricia Borensztejn UART Universal Asynchronous receiver and transmitter: dispositivo (controlador ) que envía datos paralelos sobre una línea serie.
UART Diseño de Sistemas con FPGA 1er cuatrimestre 2013 Patricia Borensztejn UART Universal Asynchronous receiver and transmitter: dispositivo (controlador ) que envía datos paralelos sobre una línea serie.
INTRODUCCIÓN A LAS REDES DE ORDENADORES
 INTRODUCCIÓN A LAS REDES DE ORDENADORES Historia Primeros ordenadores ( 1960) Un voluminoso y costoso ordenador Solo gobiernos y universidades Modo de trabajo Los usuarios codifican en tarjetas perforadas
INTRODUCCIÓN A LAS REDES DE ORDENADORES Historia Primeros ordenadores ( 1960) Un voluminoso y costoso ordenador Solo gobiernos y universidades Modo de trabajo Los usuarios codifican en tarjetas perforadas
UNIDAD VI CONTROL DEL ENLACE DE DATOS Y MULTIPLEXACIÓN.
 UNIDAD VI 6.1 Introducción. CONTROL DEL ENLACE DE DATOS Y MULTIPLEXACIÓN. Nuestro estudio hasta ahora se ha concentrado en el envío de señales a través del enlace de transmisión. Para conseguir que la
UNIDAD VI 6.1 Introducción. CONTROL DEL ENLACE DE DATOS Y MULTIPLEXACIÓN. Nuestro estudio hasta ahora se ha concentrado en el envío de señales a través del enlace de transmisión. Para conseguir que la
Estructura de Computadores. Contenido. Sistema de E/S. 7.- E/S y dispositivos periféricos
 Estructura de Computadores 7.- E/S y dispositivos periféricos Contenido Clasificación y tipos de periféricos Módulos de E/S. Instrucciones de E/S. Técnicas de E/S. E/S programada. E/S mediante interrupciones.
Estructura de Computadores 7.- E/S y dispositivos periféricos Contenido Clasificación y tipos de periféricos Módulos de E/S. Instrucciones de E/S. Técnicas de E/S. E/S programada. E/S mediante interrupciones.
TEMAS 1 y 2 TECNOLOGIA DE LAS COMUNICACIONES INGENIERÍA INFORMÁTICA
 TEMAS 1 y 2 TECNOLOGIA DE LAS COMUNICACIONES INGENIERÍA INFORMÁTICA Tema1. Introducción Tema1. Introducción Tema1. Introducción Tema1. Introducción Tema1. Introducción Tema1. Introducción Tema1. Introducción
TEMAS 1 y 2 TECNOLOGIA DE LAS COMUNICACIONES INGENIERÍA INFORMÁTICA Tema1. Introducción Tema1. Introducción Tema1. Introducción Tema1. Introducción Tema1. Introducción Tema1. Introducción Tema1. Introducción
Arquitectura de Computadoras 2011
 Arquitectura de Computadoras Unidad 7: Entrada/Salida Arquitectura de Computadoras Aspectos claves La arquitectura de E/S es su interfaz con el exterior Se diseña de manera sistemática para controlar las
Arquitectura de Computadoras Unidad 7: Entrada/Salida Arquitectura de Computadoras Aspectos claves La arquitectura de E/S es su interfaz con el exterior Se diseña de manera sistemática para controlar las
ARQUITECTURA DE LA MEMORIA EN LOS DSPs
 ARQUITECTURA DE LA MEMORIA EN LOS DSPs Xt Xt-1 Xt-2 Xt-(n-2) Xt-(n-1)..... D D D Co X C1 X Cn-2 Cn-1 X X +... + + Yt UN PROCESO TÍPICO EN EL PROCESAMIENTO DIGITAL DE SEÑALES, COMO PUEDA SER EL FILTRADO
ARQUITECTURA DE LA MEMORIA EN LOS DSPs Xt Xt-1 Xt-2 Xt-(n-2) Xt-(n-1)..... D D D Co X C1 X Cn-2 Cn-1 X X +... + + Yt UN PROCESO TÍPICO EN EL PROCESAMIENTO DIGITAL DE SEÑALES, COMO PUEDA SER EL FILTRADO
UIT-T X.24 SECTOR DE NORMALIZACIÓN DE LAS TELECOMUNICACIONES DE LA UIT
 UNIÓN INTERNACIONAL DE TELECOMUNICACIONES UIT-T.24 SECTOR DE NORMALIZACIÓN DE LAS TELECOMUNICACIONES DE LA UIT REDES PÚBLICAS DE DATOS INTERFACES LISTA DE DEFINICIONES DE CIRCUITOS DE ENLACE ENTRE EL EQUIPO
UNIÓN INTERNACIONAL DE TELECOMUNICACIONES UIT-T.24 SECTOR DE NORMALIZACIÓN DE LAS TELECOMUNICACIONES DE LA UIT REDES PÚBLICAS DE DATOS INTERFACES LISTA DE DEFINICIONES DE CIRCUITOS DE ENLACE ENTRE EL EQUIPO
EL ORDENADOR HARDWARE SOFTWARE
 EL ORDENADOR HARDWARE Y SOFTWARE Profesor: Julio Serrano Qué es y cómo funciona un Ordenador? Es un máquina electrónica que se encarga del tratamiento digital de la información de una forma rápida. Cómo
EL ORDENADOR HARDWARE Y SOFTWARE Profesor: Julio Serrano Qué es y cómo funciona un Ordenador? Es un máquina electrónica que se encarga del tratamiento digital de la información de una forma rápida. Cómo
Electrónica digital. Notas...
 Electrónica digital La electrónica digital es aquella que trata las señales digitales, siendo estas las que están compuesta de tensiones que pueden adquirir dos niveles de tensión, denominándose normalmente
Electrónica digital La electrónica digital es aquella que trata las señales digitales, siendo estas las que están compuesta de tensiones que pueden adquirir dos niveles de tensión, denominándose normalmente
Tema 10: Transmisión de datos
 Tema 10: Transmisión de datos Solicitado: Tarea 08: Mapa conceptual: Transmisión de datos M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx @edfrancom edgardoadrianfrancom
Tema 10: Transmisión de datos Solicitado: Tarea 08: Mapa conceptual: Transmisión de datos M. en C. Edgardo Adrián Franco Martínez http://www.eafranco.com edfrancom@ipn.mx @edfrancom edgardoadrianfrancom
Arquitectura de placas
 Arquitectura de placas Organización de buses ESTRUCTURAS BÁSICAS DE INTERCONEXIÓN. Las unidades funcionales de una computadora se interconectan de acuerdo a una determinada organización. Estructuras más
Arquitectura de placas Organización de buses ESTRUCTURAS BÁSICAS DE INTERCONEXIÓN. Las unidades funcionales de una computadora se interconectan de acuerdo a una determinada organización. Estructuras más
COMUNICACIONES TRANSMISIÓN DE DATOS REDES DE ORDENADORES INTERNET. Sistemas de transmisión de datos
 COMUNICACIONES TRANSMISIÓN DE DATOS REDES DE ORDENADORES INTERNET Sistemas de transmisión de datos Transmisión en serie: Los bits de cada palabra se transfieren secuencialmente por una única línea de datos
COMUNICACIONES TRANSMISIÓN DE DATOS REDES DE ORDENADORES INTERNET Sistemas de transmisión de datos Transmisión en serie: Los bits de cada palabra se transfieren secuencialmente por una única línea de datos
Fundamentos de las TIC
 Fundamentos de las TIC Sistemas Informáticos Conceptos básicos El término Informática proviene de la unión de dos palabras: INFORmación y automática. La Informática es, por tanto, la ciencia que estudia
Fundamentos de las TIC Sistemas Informáticos Conceptos básicos El término Informática proviene de la unión de dos palabras: INFORmación y automática. La Informática es, por tanto, la ciencia que estudia
La Comunicación es la transferencia de información con sentido desde un lugar (fuente,transmisor) a otro lugar (destino, receptor).
 a otro lugar (destino, receptor).") La Comunicación es la transferencia de información con sentido desde un lugar (fuente,transmisor) a otro lugar (destino, receptor). Elementos básicos de un sistema de comunicaciones 1 El Transmisor pasa
La Comunicación es la transferencia de información con sentido desde un lugar (fuente,transmisor) a otro lugar (destino, receptor). Elementos básicos de un sistema de comunicaciones 1 El Transmisor pasa
ESTRUCTURA BÁSICA DE UN ORDENADOR
 ESTRUCTURA BÁSICA DE UN ORDENADOR QUÉ ES UN ORDENADOR? Un ordenador es una máquina... QUÉ ES UN ORDENADOR? Un ordenador es una máquina... QUÉ ES UN ORDENADOR? Un ordenador es una máquina... Qué son los
ESTRUCTURA BÁSICA DE UN ORDENADOR QUÉ ES UN ORDENADOR? Un ordenador es una máquina... QUÉ ES UN ORDENADOR? Un ordenador es una máquina... QUÉ ES UN ORDENADOR? Un ordenador es una máquina... Qué son los
Manejo de Entrada-Salida. Arquitectura de Computadoras
 Manejo de Entrada-Salida Arquitectura de Computadoras Agenda 1.2.3.1Módulos de entrada/salida. 1.2.3.2Entrada/salida programada. 1.2.3.3Entrada/salida mediante interrupciones. 1.2.3.4Acceso directo a memoria.
Manejo de Entrada-Salida Arquitectura de Computadoras Agenda 1.2.3.1Módulos de entrada/salida. 1.2.3.2Entrada/salida programada. 1.2.3.3Entrada/salida mediante interrupciones. 1.2.3.4Acceso directo a memoria.