ESTUDIO DE LA ESTABILIDAD EN EL DOMINIO FRECUENCIAL
|
|
|
- María del Rosario Piñeiro Aguilera
- hace 8 años
- Vistas:
Transcripción
1 ESTUDIO DE LA ESTABILIDAD EN EL DOMINIO FRECUENCIAL 1.-Introducción. 2.-Criterio de estabilidad de Nyquist. 3.-Estabilidad relativa Margen de ganancia Margen de fase. 4.-Estabilidad mediante las trazas de Bode y Black. 5.-Ábacos de Nichols.

2 Introducción Pico de resonancia (M r ): En general da una indicación de la estabilidad relativa del sistema en lazo cerrado (la resonancia es mayor cuanto más próximo esté el polo al EI; de hecho, cuando el polo es imaginario puro, este pico llega hasta el infinito).

3 Introducción Frecuencia de resonancia (w r ): Es la frecuencia en la cual ocurre el pico de resonancia M r. Suele estar un poco más a la izquierda que la frecuencia donde se encuentra el polo que lo produce. Ancho de Banda (BW): Es la frecuencia a la cual M(jw) cae al 70.7% (1/ 2 o 3db) por debajo de su valor a la frecuencia cero. En general, el ancho de banda de un sistema de control da una indicación de las propiedades de respuesta transitoria en el dominio del tiempo. Un ancho de banda grande corresponde a un tiempo de levantamiento corto (rápido), ya que las señales de más alta frecuencia pasan más fácilmente a través del sistema. Por el contrario, si el ancho de banda es pequeño, solamente señales de frecuencia relativamente bajas pueden pasar y la respuesta en el tiempo será lenta.

4 Introducción Sistema de 2º orden: Frecuencia y pico de resonancia: (ξ < 1/ 2) w r = w n M r = 2ξ 1 2ξ 1 1 2ξ 2 2 Si ξ > 1/ 2: w r = 0rd/s y M r = 1. Ancho de Banda: BW ( 2 ) ξ + ξ = ξ w n Es proporcional a M r y w n e inversamente proporcinal al tiempo de subida (t r ) y al coeficiente de amortiguamiento ξ.
 y al coeficiente de")
5 Criterio de Estabilidad de Nyquist Funciones de fase mínima (sin ceros ni polos en SPD). En ellas, sabiendo la relación del módulo puede obtenerse la de la fase, y viceversa. Funciones de fase no mínima. No debe usarse el criterio con los diagramas de Bode o Black. Solamente con el polar. Es un método semigráfico para determinar la estabilidad de un sistema G(s)H(s) realimentado.

6 Criterio de Estabilidad de Nyquist Ventajas: Además de aportar la estabilidad absoluta, como el criterio de Routh-Hurwitz, también da información sobre la estabilidad relativa de un sistema estable y el grado de estabilidad de un sistema inestable. También da información de cómo se puede mejorar la estabilidad del sistema, si es necesario. La traza de Nyquist de L(s) es muy fácil de obtener, al menos con ayuda de un computador. La traza de Nyquist de L(s) de información sobre las características en el dominio de la frecuencia, tales como M r, w r, BW y otras, con facilidad. La traza de Nyquist es útil para sistemas con retardos puros que no se pueden tratar con el criterio de Routh-Hurwitz, y que son difíciles de analizar con el método del lugar de las raíces.
 de información sobre las características en el dominio de la frecuencia, tales como M r, w r, BW y otras, con facilidad.")
7 Criterio de Estabilidad de Nyquist Sistema en lazo cerrado: G( s) M ( s) = 1+ G( s) H ( s) G( s) H ( s) L( s) = K(1 + T s)(1 + T s p 1 (1 + T a 2 s)(1 + T s)...(1 + T b m s)...(1 + T n s) s) e Ts Ecuación característica: (s) = 1 + L(s) = 0 Los ceros de la función de transferencia de lazo son los ceros de L(s). Los polos de la función de transferencia de lazo son los polos de L(s). Los polos de la función de transferencia en lazo cerrado son los ceros de 1+L(s). Los polos de 1+L(s) son los polos de L(s).
. Los polos de la función de transferencia de lazo son los polos de L(s).")
8 Criterio de Estabilidad de Nyquist Estabilidad En lazo abierto: Todos los polos de L(s) en el SPI. En lazo cerrado: Todos los polos de 1+L(s) están en el SPI (salvo los sistemas con polos intencionados en s = 0).

9 Criterio de Estabilidad de Nyquist Un punto o una región en un plano de una función compleja está encerrado por una trayectoria cerrada si está dentro de la trayectoria. Si, además, la trayectoria cerrada tiene una dirección asignada, el encierro podrá hacerse en el sentido de las manecillas del reloj (SMR) o en el sentido contrario (SCMR).
 o en el sentido contrario")
10 Criterio de Estabilidad de Nyquist Un punto o región se dice incluido por una trayectoria cerrada si está encerrado en la dirección SCMR, o el punto o región está a la izquierda de la trayectoria cuando ésta se recorre en la dirección prescrita. Cuando un punto está encerrado por una trayectoria cerrada, se puede asignar un número N al número de veces que está encerrado. Por definición, N es positivo para encierros en el SCMR y negativo para rodeos en el SMR.

11 Criterio de Estabilidad de Nyquist Se basa en el Principio del Argumento de Cauchy: N = Z P N es el número de veces que la traza L(s) encierra al punto (-1,j0). Z es el número de ceros de 1+L(s) que están dentro de la trayectoria de Nyquist (es decir, en el SPD). P es el número de polos de 1+L(s) (o sea, de L(s)), en el SPD.
 que están dentro de la trayectoria de Nyquist")
12 Criterio de Estabilidad de Nyquist Por la estabilidad en lazo cerrado: Z = 0 N = -P Por la estabilidad en lazo abierto (sistemas de fase mínima): P = 0 N = 0 En general: Para que un sistema en lazo cerrado sea estable, la traza de L(s) debe encerrar al punto (-1,j0) un número de veces igual al número de polos de L(s) que están en el semiplano derecho del plano s, y los encierros, si los hay, deben ser hechos en la dirección SMR (si la trayectoria está definida en sentido SCMR).

13 Criterio de Estabilidad de Nyquist Para sistemas de fase mínima: N = 0 Para un sistema en lazo cerrado con función de transferencia de lazo L(s), que es de tipo de fase mínima, el sistema es estable en lazo cerrado si la gráfica de L(s) que corresponde a la trayectoria de Nyquist no encierra al punto (-1,0j), si el punto (-1, j0) está encerrado por la traza de Nyquist, el sistema es inestable.
, si el punto (-1, j0) está encerrado por la traza de Nyquist, el sistema")
14 Criterio de Estabilidad de Nyquist Ejemplo: L( s) = G( s) H ( s) = s( s + K 2)( s + 10) (k = 100)
( s + 10) (k =")
15 Criterio de Estabilidad de Nyquist Pasos: Sustituir s por jw. Hacer w=0: L(j0) = -90º Hacer w= : L(j ) = 0-270º Intersección con el eje real: 2 K(20 w ) Im 2 2 w(144w + (20 w ) [ L( jw) ] = = 0 w = ± 20rd / s L( j 20) = K Para k < 240, el sistema será estable, e inestable para k > 240 (K = 240: marginalmente estable)
![K(20 w ) Im 2 2 w(144w + (20 w ) [ L( jw) ] = = 0 w = ± 20rd / s L( j 20) = 0.](/docs-images/44/10377162/images/page_15.jpg "004167K Para k < 240, el sistema será estable, e inestable para k > 240 (K = 240:")
16 Criterio de Estabilidad de Nyquist Adición de polos y ceros a la función de lazo: Adición de polos en s=0: Uno solo, puede seguir siendo estable. Dos o más: pasa a ser inestable. Adición de polos en s 0: No modifica el comportamiento en w=0, pero sí suma +90º, con lo que se tiende a inestabilizar. Adición de ceros: Se reduce el porcentaje de sobreimpulso y tiempo de estabilización (incremento de fase en +90º)

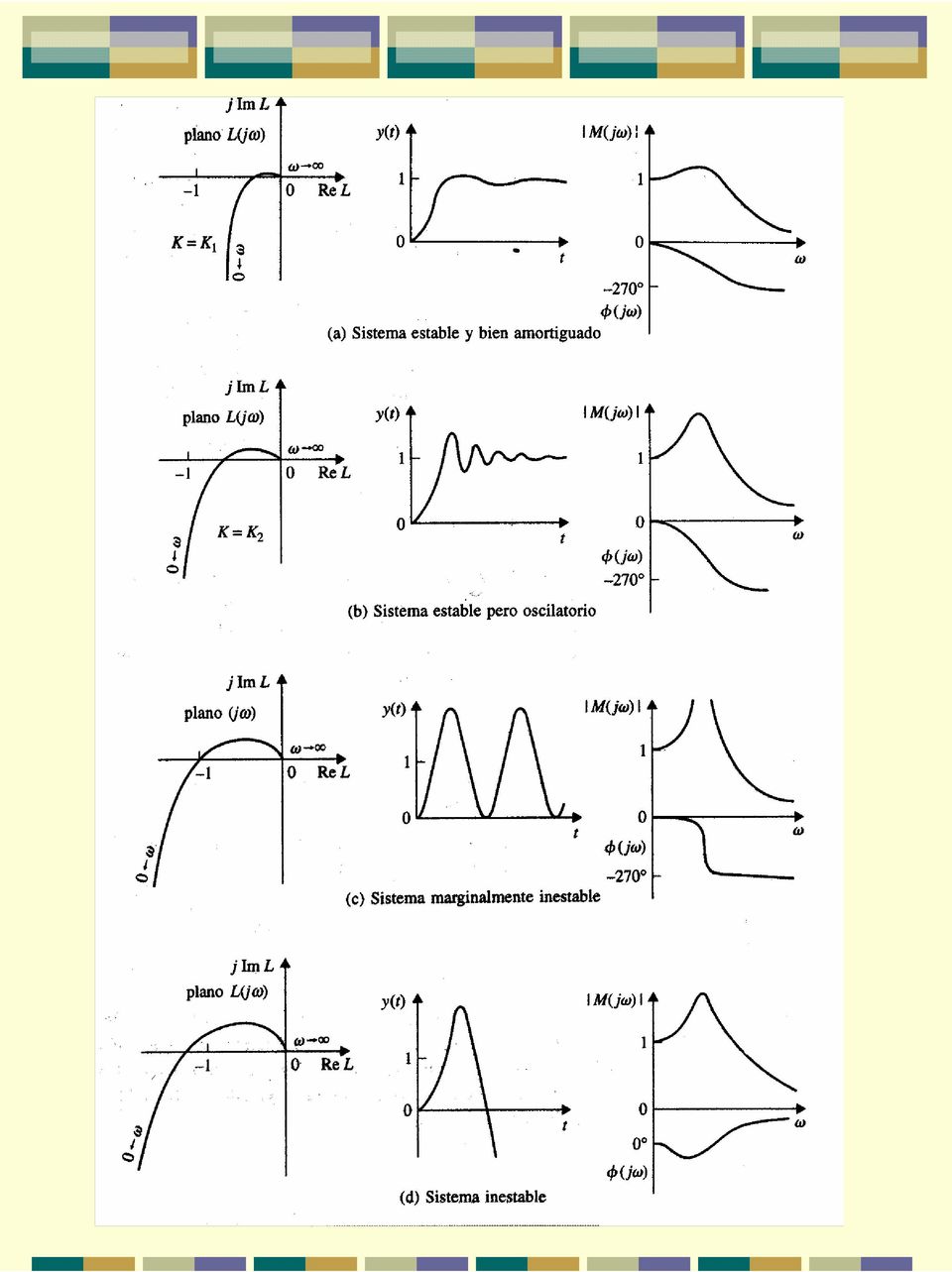
17 Estabilidad Relativa En el dominio del tiempo, la estabilidad relativa se mide por parámetros tales como el sobreimpulso máximo y el factor de amortiguamiento. En el dominio de la frecuencia, el pico de resonancia M se puede emplear para indicar la estabilidad relativa. Otra forma de medir la estabilidad relativa en el dominio de la frecuencia es observando qué tan cerca se encuentra la traza de Nyquist de L(jw) del punto (-1,j0). Para mostrar el concepto de estabilidad relativa en el dominio de la frecuencia, se muestran las trazas de Nyquist, la respuesta al escalón correspondiente y las respuestas en frecuencia de un sistema típico de tercer orden en la figura siguiente, para cuatro valores diferentes de la ganancia de lazo K. Se supone que la función de lazo L(jw) es de fase mínima.

18
19 Margen de Ganancia (GM) El margen de ganancia (GM) es uno de los criterios más empleados para medir la estabilidad relativa de sistemas de control. En el dominio de la frecuencia, el margen de ganancia se emplea para indicar la cercanía de la intersección del eje real negativo hecho por la traza de Nyquist de L(jw) al punto (-1,j0). Cruce de fase: Un cruce de fase sobre la traza de L(jw) es un punto en el cual la traza se intersecta con el eje real negativo (esto es, la fase en ese punto es de 180º). Frecuencia de cruce de fase (w p ): Es la frecuencia en el cruce de fase, o donde L(jw) = 180º.
 es un punto en el cual la traza se intersecta con el eje real negativo (esto es, la fase en")
20 Margen de Ganancia (GM) Margen de Ganancia (GM): GM = 1 20log = 20log10 L( jw ) 10 p p L( jw Es la cantidad de ganancia en decibelios (db) que se pueden añadir al lazo antes de que el sistema en lazo cerrado se vuelva inestable. )

21 Margen de Fase (PM) El margen de ganancia por sí solo es inadecuado para indicar la estabilidad relativa cuando otros parámetros del sistema como la ganancia de lazo están sujetos a variación.
22 Margen de Fase (PM) Cruce de ganancia: Es el punto sobre la traza de L(jw) en el cual la magnitud de L(jw) es igual a 1. Frecuencia de cruce de ganancia (w g ): Es la frecuencia de L(jw) en el cruce de ganancia, o donde L(jw g ) = 1. El margen de fase (PM) se define como el ángulo en grados que la traza L(jw) se debe rotar alrededor del origen, para que el cruce de ganancia pase por el punto (-1, j0)
23 Margen de Fase (PM) Cuando el sistema es de tipo de fase mínima, la expresión analítica del margen de ganancia se puede expresar como: Margen de fase (PM) = L(jw g ) 180º en donde w g es la frecuencia de cruce de ganancia.
24 Margen de Fase (PM) En contraste al margen de ganancia, que se determina por la ganancia de lazo, el margen de fase indica el efecto sobre la estabilidad del sistema debido a cambios en los parámetros del sistema que teóricamente alteran la fase de L(jw) por una cantidad igual en todas las frecuencias. El margen de fase es la cantidad de retardo puro que se puede añadir al sistema antes de que el sistema en lazo cerrado se vuelva inestable. Generalmente un GM de unos 6db y un PM entre 30º y 35º está bien. Para sistemas de 2º orden con ξ<0.6 se cumple bien la aproximación: PM = 10 ξ
25 Estabilidad mediante Trazas de Bode y Black Las trazas de Bode de una función de transferencia son una herramienta gráfica de suma utilidad para el análisis y diseño de sistemas de control lineales. Antes de la aparición de los computadores, las trazas de Bode eran a menudo conocidas como trazas asintóticas, debido a que las curvas de magnitud y fase se podían bosquejar de sus propiedades asintóticas sin detallar las gráficas. Las aplicaciones modernas de las trazas de Bode para sistemas de control se deben identificar con las siguientes ventajas y desventajas:
26 Trazas de Bode Ventajas: En ausencia de una computadora, las trazas de Bode se pueden bosquejar por la aproximación de magnitud y fase con segmentos de línea recta. El cruce de ganancia, el cruce de fase, el margen de ganancia y el margen de fase se determinan más fácilmente en las trazas de Bode que en la traza de Nyquist. Para propósitos de diseño, los efectos de añadir controladores y sus parámetros se visualizan con mayor facilidad sobre las trazas de Bode que sobre la traza de Nyquist. Las trazas de Bode no cambian de forma (solamente suben o bajan) cuando se modifica la ganancia del sistema.
27 Trazas de Bode Desventajas: La estabilidad absoluta y relativa de sistemas de fase no mínima no se puede determinar desde las trazas de Bode.
28 Trazas de Bode El margen de ganancia es positivo y el sistema es estable si la magnitud de L(jw) al cruce de fase es negativo (en db). Esto es, el margen de ganancia se mide abajo del eje 0 db. Si el margen se mide arriba del eje 0db, será negativo y el sistema inestable. El margen de fase es positivo y el sistema es estable si la fase de L(jw) es mayor que 180º en el cruce de ganancia. Esto es, el margen de fase se mide arriba del eje 180º. Si el margen de fase se mide abajo del eje 180º, el margen de fase es negativo, y el sistema es inestable.
29 Trazas de Bode Los sistemas que tienen varios cruces de fase, reciben el nombre de Sistemas condicionalmente estables. En ellos, se tiene que el sistema es estable en un intervalo de valores de K, y tanto por debajo, como por encima, el sistema se torna inestable. Esto puede verse también en la traza de Nyquist, cuando se tengan varios puntos de corte en el eje negativo.
30 Traza de Black
31 Traza de Black El punto crítico es la intersección del eje 0 db y el eje 180º. El cruce de fase es donde el lugar geométrico intercepta al eje 180º. El cruce de ganancia es donde el lugar geométrico intercepta al eje 0db. El margen de ganancia es la distancia vertical en db medida del cruce de fase al punto crítico. El margen de fase es la distancia horizontal en grados, medida del cruce de ganancia al punto crítico. Para sistemas con realimentación unitaria, los parámetros del sistema en lazo cerrado, tales como M r, w r, y BW se pueden determinar de la traza con la ayuda del lugar geométrico de M constante (ábacos de Nichols).
32 Ábacos de Nichols El ábaco o carta de Nichols indica los lugares geométricos de magnitud constante y de fase constante, para un sistema en lazo cerrado (unitario). Debido al inconveniente ya mencionado de que la traza de Nyquist cambia de forma, con solo variar la ganancia del lazo, cosa que no ocurre con la traza de Black, suele ser más interesante trabajar con esta última, incluyendo esas zonas de módulo y fase constante, conocido como carta de Nichols.
33 Ábacos de Nichols Una vez que la curva G(jw) del sistema se construye en la carta de Nichols, las intersecciones entre el lugar geométrico de M constante y la trayectoria G(jw) dan el valor de M a las frecuencias correspondientes de G(jw). El pico de resonancia M r se encuentra al localizar el lugar geométrico más pequeño de M constante (M 1) que es tangente a la curva G(jw). La frecuencia de resonancia es la frecuencia de G(jw) en el punto de tangencia. El ancho de banda del sistema en lazo cerrado es la frecuencia en la cual la curva G(jw) intercepta al lugar geométrico M = (-3db).
34 Ábacos de Nichols Ejemplo: sea un sistema realimentado unitariamente, con ganancia en trayectoria directa: G( s) = s( s K )( s ) Obtener las trazas de Bode y Nichols (Black) para los valores K = 7,248; K=14,5; K=181,2; y K=273,57 K M p (%) M r W r (rd/s) GM(db) PM(º) BW(rd/s) 7,25 0,0 1,0 1,00 31,57 75,90 119,0 14,50 4,3 1,0 43,33 25,55 64,25 270,5 181,20 15,2 7,6 900,00 3,61 7, ,0 273,57 100,0 1000,00 0,00 0, ,5
35 Ábacos de Nichols
36 Ábacos de Nichols Podemos observar como los valores del ancho de banda (BW) se obtienen de los cortes con el lugar de M=0.707 (3db). El margen de fase (PM) de los cortes con el eje real (0db) y los márgenes de ganancia (GM) de los cortes verticales por 180º. Igualmente, la tangencia con los lugares M constante nos da el pico M r para la resonancia en lazo cerrado (si M>1).
37 Trazas de Bode en lazo abierto
38 Trazas de Bode en lazo abierto Podemos apreciar el margen de ganancia es negativo (curva del módulo por debajo de 0db) hasta que K alcanza el valor A partir de ahí, el módulo pasa por encima para la frecuencia de cruce, con lo cual el sistema será inestable en lazo cerado (nótese que es un sistema de fase mínima). Nótese también como el margen de fase (PM) va disminuyendo hasta llegar a 0º para K =
39 Traza de Bode en Lazo cerrado Se comprueban las previsiones de la tabla anterior, haciendo notar que la resonancia en K = 273,57 es infinita por pasar el Diagrama de Black de ese valor, por el punto crítico(-1, j0), esto es, 0db para 180º.
ESTUDIO DE LA ESTABILIDAD EN EL DOMINIO FRECUENCIAL
 TEMA X ESTUDIO DE LA ESTABILIDAD EN EL DOMINIO FRECUENCIAL 1.-Introducción..-Criterio de estabilidad de Nyquist. 3.-Estabilidad relativa. 3.1.-Margen de ganancia. 3..-Margen de fase. 4.-Estabilidad mediante
TEMA X ESTUDIO DE LA ESTABILIDAD EN EL DOMINIO FRECUENCIAL 1.-Introducción..-Criterio de estabilidad de Nyquist. 3.-Estabilidad relativa. 3.1.-Margen de ganancia. 3..-Margen de fase. 4.-Estabilidad mediante
6. Análisis en el dominio de la frecuencia. Teoría de Control
 6. Análisis en el dominio de la frecuencia Teoría de Control Introducción El término respuesta en frecuencia, indica la respuesta en estado estacionario de un sistema a una entrada senoidal. La respuesta
6. Análisis en el dominio de la frecuencia Teoría de Control Introducción El término respuesta en frecuencia, indica la respuesta en estado estacionario de un sistema a una entrada senoidal. La respuesta
Introducción. Culminación de todos los anteriores capítulos. Tipos de compensación. Acción de control. Tipos de acción:
 DISEÑO DE SISTEMAS DE CONTROL 1.-Introducción. 2.-El problema del diseño. 3.-Tipos de compensación. 4.-Reguladores. 4.1.-Acción Proporcional. Reguladores P. 4.2.-Acción Derivativa. Reguladores PD. 4.3.-Acción
DISEÑO DE SISTEMAS DE CONTROL 1.-Introducción. 2.-El problema del diseño. 3.-Tipos de compensación. 4.-Reguladores. 4.1.-Acción Proporcional. Reguladores P. 4.2.-Acción Derivativa. Reguladores PD. 4.3.-Acción
Automá ca. Ejercicios Capítulo7.2.AnálisisFrecuencial(Parte2)
") Automáca Ejercicios Capítulo7..AnálisisFrecuencial(Parte) JoséRamónLlataGarcía EstherGonzálezSarabia DámasoFernándezPérez CarlosToreFerero MaríaSandraRoblaGómez DepartamentodeTecnologíaElectrónica eingenieríadesistemasyautomáca
Automáca Ejercicios Capítulo7..AnálisisFrecuencial(Parte) JoséRamónLlataGarcía EstherGonzálezSarabia DámasoFernándezPérez CarlosToreFerero MaríaSandraRoblaGómez DepartamentodeTecnologíaElectrónica eingenieríadesistemasyautomáca
INDICE 1. Introducción 1.2. Qué es Realimentación y Cuáles son sus Efectos? 1.3. Tipos de Sistemas de Control Realimentado
 INDICE Prefacio XIX Prefacio al Software de Computadora para Sistemas de Control XXII 1. Introducción 1 1.1. Introducción 1 1.1.1. Componentes básicos de un sistema de control 2 1.1.2. Ejemplos de aplicaciones
INDICE Prefacio XIX Prefacio al Software de Computadora para Sistemas de Control XXII 1. Introducción 1 1.1. Introducción 1 1.1.1. Componentes básicos de un sistema de control 2 1.1.2. Ejemplos de aplicaciones
17. DOMINIO FRECUENCIA CRITERIO DE BODE
 327 17. DOMINIO FRECUENCIA CRITERIO DE BODE 17.1 INTRODUCCION Las técnicas para analizar la respuesta de un sistema en el dominio de la frecuencia son las más populares para el análisis y diseño del control
327 17. DOMINIO FRECUENCIA CRITERIO DE BODE 17.1 INTRODUCCION Las técnicas para analizar la respuesta de un sistema en el dominio de la frecuencia son las más populares para el análisis y diseño del control
Determinación experimental de la respuesta en frecuencia
 Determinación experimental de la respuesta en frecuencia Análisis Dinámico de Sistemas (Teleco) Área de Ingeniería de Sistemas y Automática Escuela Politécnica Superior de Ingeniería Gijón Universidad
Determinación experimental de la respuesta en frecuencia Análisis Dinámico de Sistemas (Teleco) Área de Ingeniería de Sistemas y Automática Escuela Politécnica Superior de Ingeniería Gijón Universidad
REGULACIÓN AUTOMATICA (7)
") REGULACIÓN AUTOMATICA (7) (Respuesta en frecuencia Bode) Escuela Politécnica Superior Profesor: Darío García Rodríguez CONCEPTOS UTILES Definición de Decibelios.- La necesidad de comparar magnitudes en
REGULACIÓN AUTOMATICA (7) (Respuesta en frecuencia Bode) Escuela Politécnica Superior Profesor: Darío García Rodríguez CONCEPTOS UTILES Definición de Decibelios.- La necesidad de comparar magnitudes en
ANÁLISIS EN EL DOMINIO DE LA FRECUENCIA
 TEMA VII ANÁLISIS EN EL DOMINIO DE LA FRECUENCIA.-Introducción..-Respuesta en frecuencia...-diagrama cero-polar. 3.-Representación gráfica de la respuesta en frecuencia. 3..-Diagramas de Bode. 3..-Diagrama
TEMA VII ANÁLISIS EN EL DOMINIO DE LA FRECUENCIA.-Introducción..-Respuesta en frecuencia...-diagrama cero-polar. 3.-Representación gráfica de la respuesta en frecuencia. 3..-Diagramas de Bode. 3..-Diagrama
DOMINIO Y RANGO página 89. Cuando se grafica una función existen las siguientes posibilidades:
 DOMINIO Y RANGO página 89 3. CONCEPTOS Y DEFINICIONES Cuando se grafica una función eisten las siguientes posibilidades: a) Que la gráfica ocupe todo el plano horizontalmente (sobre el eje de las ). b)
DOMINIO Y RANGO página 89 3. CONCEPTOS Y DEFINICIONES Cuando se grafica una función eisten las siguientes posibilidades: a) Que la gráfica ocupe todo el plano horizontalmente (sobre el eje de las ). b)
Diseño de controladores en el dominio de la frecuencia
 Práctica 5 Diseño de controladores en el dominio de la frecuencia Sistemas Automáticos, EPSIG Abril 2007 1. Requisitos previos Los requisitos enumerados a continuación son imprescindibles para el adecuado
Práctica 5 Diseño de controladores en el dominio de la frecuencia Sistemas Automáticos, EPSIG Abril 2007 1. Requisitos previos Los requisitos enumerados a continuación son imprescindibles para el adecuado
Juan Antonio González Mota Profesor de Matemáticas del Colegio Juan XIII Zaidín de Granada
 FUNCIONES CONOCIDAS. FUNCIONES LINEALES. Se llaman funciones lineales a aquellas que se representan mediante rectas. Su epresión en forma eplícita es y f ( ) a b. En sentido más estricto, se llaman funciones
FUNCIONES CONOCIDAS. FUNCIONES LINEALES. Se llaman funciones lineales a aquellas que se representan mediante rectas. Su epresión en forma eplícita es y f ( ) a b. En sentido más estricto, se llaman funciones
Test de ejercicios de auto-evaluación del módulo 2 Lecciones 3 y 4
 Test de ejercicios de auto-evaluación del módulo Lecciones 3 y 4 1) La Figura B muestra la respuesta de un sistema de segundo orden ante una entrada de tipo escalón De qué tipo de sistema se trata?.4 Step
Test de ejercicios de auto-evaluación del módulo Lecciones 3 y 4 1) La Figura B muestra la respuesta de un sistema de segundo orden ante una entrada de tipo escalón De qué tipo de sistema se trata?.4 Step
UNIDAD 4: PLANO CARTESIANO, RELACIONES Y FUNCIONES. OBJETIVO DE APRENDIZAJE: Representar gráficamente relaciones y funciones en el plano cartesiano.
 UNIDAD 4: PLANO CARTESIANO, RELACIONES Y FUNCIONES OBJETIVO DE APRENDIZAJE: Representar gráficamente relaciones y funciones en el plano cartesiano. EL PLANO CARTESIANO. El plano cartesiano está formado
UNIDAD 4: PLANO CARTESIANO, RELACIONES Y FUNCIONES OBJETIVO DE APRENDIZAJE: Representar gráficamente relaciones y funciones en el plano cartesiano. EL PLANO CARTESIANO. El plano cartesiano está formado
En la siguiente gráfica se muestra una función lineal y lo que representa m y b.
 FUNCIÓN LINEAL. La función lineal o de primer grado es aquella que se representa gráficamente por medio de una línea recta. Dicha función tiene una ecuación lineal de la forma f()= =m+b, en donde m b son
FUNCIÓN LINEAL. La función lineal o de primer grado es aquella que se representa gráficamente por medio de una línea recta. Dicha función tiene una ecuación lineal de la forma f()= =m+b, en donde m b son
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION
 CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
CAPITULO II CARACTERISTICAS DE LOS INSTRUMENTOS DE MEDICION Como hemos dicho anteriormente, los instrumentos de medición hacen posible la observación de los fenómenos eléctricos y su cuantificación. Ahora
Características de funciones que son inversas de otras
 Características de funciones que son inversas de otras Si f es una función inyectiva, llamamos función inversa de f y se representa por f 1 al conjunto. f 1 = a, b b, a f} Es decir, f 1 (x, y) = { x =
Características de funciones que son inversas de otras Si f es una función inyectiva, llamamos función inversa de f y se representa por f 1 al conjunto. f 1 = a, b b, a f} Es decir, f 1 (x, y) = { x =
1.4.- D E S I G U A L D A D E S
 1.4.- D E S I G U A L D A D E S OBJETIVO: Que el alumno conozca y maneje las reglas empleadas en la resolución de desigualdades y las use para determinar el conjunto solución de una desigualdad dada y
1.4.- D E S I G U A L D A D E S OBJETIVO: Que el alumno conozca y maneje las reglas empleadas en la resolución de desigualdades y las use para determinar el conjunto solución de una desigualdad dada y
SISTEMAS DE COORDENADAS SISTEMA COORDENADO UNIDIMENSIONAL
 SISTEMAS DE COORDENADAS En la vida diaria, nos encontramos con el problema de ordenar algunos objetos; de tal manera que es necesario agruparlos, identificarlos, seleccionarlos, estereotiparlos, etc.,
SISTEMAS DE COORDENADAS En la vida diaria, nos encontramos con el problema de ordenar algunos objetos; de tal manera que es necesario agruparlos, identificarlos, seleccionarlos, estereotiparlos, etc.,
E.T.S.I. INDUSTRIAL DE BEJAR UNIVERSIDAD DE SALAMANCA CAPITULO
 Análisis en el dominio de la frecuencia 121 E.T.S.I. INDUSTRIAL DE BEJAR UNIVERSIDAD DE SALAMANCA CAPITULO 9 ANALISIS EN EL DOMINIO DE LA FRECUENCIA 122 Problemas de ingeniería de control RESPUESTA FRECUENCIAL
Análisis en el dominio de la frecuencia 121 E.T.S.I. INDUSTRIAL DE BEJAR UNIVERSIDAD DE SALAMANCA CAPITULO 9 ANALISIS EN EL DOMINIO DE LA FRECUENCIA 122 Problemas de ingeniería de control RESPUESTA FRECUENCIAL
EXAMEN DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA 02/09/2008
 EXAMEN DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA 2/9/28 EJERCICIO I (25%) Se dispone de un ventilador de cuatro velocidades. Dichas velocidades son accionadas respectivamente por la señales V, V2, V, V4.
EXAMEN DE INGENIERÍA DE SISTEMAS Y AUTOMÁTICA 2/9/28 EJERCICIO I (25%) Se dispone de un ventilador de cuatro velocidades. Dichas velocidades son accionadas respectivamente por la señales V, V2, V, V4.
Dominio de la Frecuencia
 Dominio de la Frecuencia Sistemas Electrónicos de Control Álvaro Gutiérrez 17 de Marzo de 2015 aguti@etsit.upm.es www.robolabo.etsit.upm.es Índice 1 Introducción 2 Representaciones Gráficas Diagrama de
Dominio de la Frecuencia Sistemas Electrónicos de Control Álvaro Gutiérrez 17 de Marzo de 2015 aguti@etsit.upm.es www.robolabo.etsit.upm.es Índice 1 Introducción 2 Representaciones Gráficas Diagrama de
COORDENADAS CURVILINEAS
 CAPITULO V CALCULO II COORDENADAS CURVILINEAS Un sistema de coordenadas es un conjunto de valores que permiten definir unívocamente la posición de cualquier punto de un espacio geométrico respecto de un
CAPITULO V CALCULO II COORDENADAS CURVILINEAS Un sistema de coordenadas es un conjunto de valores que permiten definir unívocamente la posición de cualquier punto de un espacio geométrico respecto de un
PRÁCTICA DE GABINETE DE COMPUTACIÓN Nº 2
 Universidad Nacional de San Juan - Facultad de Ingeniería DEPARTAMENTO DE ELECTRONICA Y AUTOMATICA Carrera: Bioingeniería Área CONTROL Asignatura: CONTROL I PRÁCTICA DE GABINETE DE COMPUTACIÓN Nº ANÁLISIS
Universidad Nacional de San Juan - Facultad de Ingeniería DEPARTAMENTO DE ELECTRONICA Y AUTOMATICA Carrera: Bioingeniería Área CONTROL Asignatura: CONTROL I PRÁCTICA DE GABINETE DE COMPUTACIÓN Nº ANÁLISIS
1. Dominio, simetría, puntos de corte y periodicidad
 Estudio y representación de funciones 1. Dominio, simetría, puntos de corte y periodicidad 1.1. Dominio Al conjunto de valores de x para los cuales está definida la función se le denomina dominio. Se suele
Estudio y representación de funciones 1. Dominio, simetría, puntos de corte y periodicidad 1.1. Dominio Al conjunto de valores de x para los cuales está definida la función se le denomina dominio. Se suele
Capítulo 10. Gráficos y diagramas
 Capítulo 10. Gráficos y diagramas 1. Introducción Los gráficos y diagramas que se acostumbran a ver en libros e informes para visualizar datos estadísticos también se utilizan con propósitos cartográficos,
Capítulo 10. Gráficos y diagramas 1. Introducción Los gráficos y diagramas que se acostumbran a ver en libros e informes para visualizar datos estadísticos también se utilizan con propósitos cartográficos,
6. VECTORES Y COORDENADAS
 6. VECTORES Y COORDENADAS Página 1 Traslaciones. Vectores Sistema de referencia. Coordenadas. Punto medio de un segmento Ecuaciones de rectas. Paralelismo. Distancias Página 2 1. TRASLACIONES. VECTORES
6. VECTORES Y COORDENADAS Página 1 Traslaciones. Vectores Sistema de referencia. Coordenadas. Punto medio de un segmento Ecuaciones de rectas. Paralelismo. Distancias Página 2 1. TRASLACIONES. VECTORES
Muchas veces hemos visto un juego de billar y no nos percatamos de los movimientos de las bolas (ver gráfico 8). Gráfico 8
. Gráfico 8") Esta semana estudiaremos la definición de vectores y su aplicabilidad a muchas situaciones, particularmente a las relacionadas con el movimiento. Por otro lado, se podrán establecer las características
Esta semana estudiaremos la definición de vectores y su aplicabilidad a muchas situaciones, particularmente a las relacionadas con el movimiento. Por otro lado, se podrán establecer las características
Lección 7 - Coordenadas rectangulares y gráficas
 Lección 7 - Coordenadas rectangulares gráficas Coordenadas rectangulares gráficas Objetivos: Al terminar esta lección podrás usar un sistema de coordenadas rectangulares para identificar puntos en un plano
Lección 7 - Coordenadas rectangulares gráficas Coordenadas rectangulares gráficas Objetivos: Al terminar esta lección podrás usar un sistema de coordenadas rectangulares para identificar puntos en un plano
Electrónica Analógica Respuesta en frecuencia. Transformada de Laplace
 Electrónica Analógica espuesta en frecuencia. Transformada de Laplace Transformada de Laplace. Introducción La transformada de Laplace es una herramienta matemática muy útil en electrónica ya que gracias
Electrónica Analógica espuesta en frecuencia. Transformada de Laplace Transformada de Laplace. Introducción La transformada de Laplace es una herramienta matemática muy útil en electrónica ya que gracias
FUNCIONES CUADRÁTICAS Y RACIONALES
 www.matesronda.net José A. Jiménez Nieto FUNCIONES CUADRÁTICAS Y RACIONALES 1. FUNCIONES CUADRÁTICAS. Representemos, en función de la longitud de la base (), el área (y) de todos los rectángulos de perímetro
www.matesronda.net José A. Jiménez Nieto FUNCIONES CUADRÁTICAS Y RACIONALES 1. FUNCIONES CUADRÁTICAS. Representemos, en función de la longitud de la base (), el área (y) de todos los rectángulos de perímetro
Circuito RL, Respuesta a la frecuencia.
 Circuito RL, Respuesta a la frecuencia. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se estudia
Circuito RL, Respuesta a la frecuencia. A.M. Velasco (133384) J.P. Soler (133380) O.A. Botina (133268) Departamento de física, facultad de ciencias, Universidad Nacional de Colombia Resumen. Se estudia
3.1 DEFINICIÓN. Figura Nº 1. Vector
 3.1 DEFINICIÓN Un vector (A) una magnitud física caracterizable mediante un módulo y una dirección (u orientación) en el espacio. Todo vector debe tener un origen marcado (M) con un punto y un final marcado
3.1 DEFINICIÓN Un vector (A) una magnitud física caracterizable mediante un módulo y una dirección (u orientación) en el espacio. Todo vector debe tener un origen marcado (M) con un punto y un final marcado
DOMINIO Y RANGO DE UNA FUNCIÓN I N D I C E. martilloatomico@gmail.com. Página. Titulo:
 Titulo: DOMINIO Y RANGO I N D I C E Página DE UNA FUNCIÓN Año escolar: 4to. Año de Bachillerato Autor: José Luis Albornoz Salazar Ocupación: Ing Civil. Docente Universitario País de residencia: Venezuela
Titulo: DOMINIO Y RANGO I N D I C E Página DE UNA FUNCIÓN Año escolar: 4to. Año de Bachillerato Autor: José Luis Albornoz Salazar Ocupación: Ing Civil. Docente Universitario País de residencia: Venezuela
Descripción: dos. función. decreciente. Figura 1. Figura 2
 Descripción: En éste tema se utiliza la primera derivada para encontrar los valores máximo y mínimo de una función, así como para determinar los intervalos en donde la función es creciente o decreciente,
Descripción: En éste tema se utiliza la primera derivada para encontrar los valores máximo y mínimo de una función, así como para determinar los intervalos en donde la función es creciente o decreciente,
1. Funciones y sus gráficas
 FUNCIONES 1. Funciones sus gráficas Función es una relación entre dos variables a las que, en general se les llama e. es la variable independiente. es la variable dependiente. La función asocia a cada
FUNCIONES 1. Funciones sus gráficas Función es una relación entre dos variables a las que, en general se les llama e. es la variable independiente. es la variable dependiente. La función asocia a cada
8.1. Introducción... 1. 8.2. Dependencia/independencia estadística... 2. 8.3. Representación gráfica: diagrama de dispersión... 3. 8.4. Regresión...
 Tema 8 Análisis de dos variables: dependencia estadística y regresión Contenido 8.1. Introducción............................. 1 8.2. Dependencia/independencia estadística.............. 2 8.3. Representación
Tema 8 Análisis de dos variables: dependencia estadística y regresión Contenido 8.1. Introducción............................. 1 8.2. Dependencia/independencia estadística.............. 2 8.3. Representación
13 Análisis dinámico en el
 3 Análisis dinámico en el dominio de la frecuencia El objetivo de este capítulo es tratar de determinar parte de la información de la cadena cerrada a partir de los datos de la estabilidad relativa. Se
3 Análisis dinámico en el dominio de la frecuencia El objetivo de este capítulo es tratar de determinar parte de la información de la cadena cerrada a partir de los datos de la estabilidad relativa. Se
Medias Móviles: Señales para invertir en la Bolsa
 www.gacetafinanciera.com Medias Móviles: Señales para invertir en la Bolsa Juan P López..www.futuros.com Las medias móviles continúan siendo una herramienta básica en lo que se refiere a determinar tendencias
www.gacetafinanciera.com Medias Móviles: Señales para invertir en la Bolsa Juan P López..www.futuros.com Las medias móviles continúan siendo una herramienta básica en lo que se refiere a determinar tendencias
Diseño de sistemas de control. Teoría de control
 Diseño de sistemas de control Teoría de control Introducción Para iniciar el proceso de diseño de un sistema de control, es necesario realizar los siguientes pasos:... Determine que debe hacer el sistema
Diseño de sistemas de control Teoría de control Introducción Para iniciar el proceso de diseño de un sistema de control, es necesario realizar los siguientes pasos:... Determine que debe hacer el sistema
Diseño en el dominio de la frecuencia
 Diseño en el dominio de la frecuencia Tema 7 1 Índice Respuesta frecuencial en bucle cerrado Red de adelanto de fase Red de atraso de fase Compensación de adelanto-atraso 2 Respuesta frecuencial en Bucle
Diseño en el dominio de la frecuencia Tema 7 1 Índice Respuesta frecuencial en bucle cerrado Red de adelanto de fase Red de atraso de fase Compensación de adelanto-atraso 2 Respuesta frecuencial en Bucle
La derivada de y respecto a x es lo que varía y por cada unidad que varía x. Ese valor se designa por dy dx.
 Conceptos de derivada y de diferencial Roberto C. Redondo Melchor, Norberto Redondo Melchor, Félix Redondo Quintela 1 Universidad de Salamanca 18 de agosto de 2012 v1.3: 17 de septiembre de 2012 Aunque
Conceptos de derivada y de diferencial Roberto C. Redondo Melchor, Norberto Redondo Melchor, Félix Redondo Quintela 1 Universidad de Salamanca 18 de agosto de 2012 v1.3: 17 de septiembre de 2012 Aunque
Ejemplo: Resolvemos Sin solución. O siempre es positiva o siempre es negativa. Damos un valor cualquiera Siempre + D(f) =
 =") T1 Dominios, Límites, Asíntotas, Derivadas y Representación Gráfica. 1.1 Dominios de funciones: Polinómicas: D( = La X puede tomar cualquier valor entre Ejemplos: D( = Función racional: es el cociente
T1 Dominios, Límites, Asíntotas, Derivadas y Representación Gráfica. 1.1 Dominios de funciones: Polinómicas: D( = La X puede tomar cualquier valor entre Ejemplos: D( = Función racional: es el cociente
Funciones más usuales 1
 Funciones más usuales 1 1. La función constante Funciones más usuales La función constante Consideremos la función más sencilla, por ejemplo. La imagen de cualquier número es siempre 2. Si hacemos una
Funciones más usuales 1 1. La función constante Funciones más usuales La función constante Consideremos la función más sencilla, por ejemplo. La imagen de cualquier número es siempre 2. Si hacemos una
DISEÑO DE SISTEMAS DE CONTROL
 TEMA XI DISEÑO DE SISTEMAS DE CONTROL 1.-Introducción. 2.-El problema del diseño. 3.-Tipos de compensación. 4.-Reguladores. 4.1.-Acción Proporcional. Reguladores P. 4.2.-Acción Derivativa. Reguladores
TEMA XI DISEÑO DE SISTEMAS DE CONTROL 1.-Introducción. 2.-El problema del diseño. 3.-Tipos de compensación. 4.-Reguladores. 4.1.-Acción Proporcional. Reguladores P. 4.2.-Acción Derivativa. Reguladores
No hay resorte que oscile cien años...
 No hay resorte que oscile cien años... María Paula Coluccio y Patricia Picardo Laboratorio I de Física para Biólogos y Geólogos Depto. de Física, FCEyN, UBA - 1999 Resumen: En el presente trabajo nos proponemos
No hay resorte que oscile cien años... María Paula Coluccio y Patricia Picardo Laboratorio I de Física para Biólogos y Geólogos Depto. de Física, FCEyN, UBA - 1999 Resumen: En el presente trabajo nos proponemos
Transformación de gráfica de funciones
 Transformación de gráfica de funciones La graficación de las funciones es como un retrato de la función. Nos auda a tener una idea de cómo transforma la función los valores que le vamos dando. A partir
Transformación de gráfica de funciones La graficación de las funciones es como un retrato de la función. Nos auda a tener una idea de cómo transforma la función los valores que le vamos dando. A partir
FUNCIONES 1. DEFINICION DOMINIO Y RANGO
 1. DEFINICION DOMINIO Y RANGO FUNCIONES Antes de definir función, uno de los conceptos fundamentales y de mayor importancia de todas las matemáticas, plantearemos algunos ejercicios que nos eran de utilidad
1. DEFINICION DOMINIO Y RANGO FUNCIONES Antes de definir función, uno de los conceptos fundamentales y de mayor importancia de todas las matemáticas, plantearemos algunos ejercicios que nos eran de utilidad
PROGRAMACIÓN LINEAL. 8.1. Introducción. 8.2. Inecuaciones lineales con 2 variables
 Capítulo 8 PROGRAMACIÓN LINEAL 8.1. Introducción La programación lineal es una técnica matemática relativamente reciente (siglo XX), que consiste en una serie de métodos y procedimientos que permiten resolver
Capítulo 8 PROGRAMACIÓN LINEAL 8.1. Introducción La programación lineal es una técnica matemática relativamente reciente (siglo XX), que consiste en una serie de métodos y procedimientos que permiten resolver
a < b y se lee "a es menor que b" (desigualdad estricta) a > b y se lee "a es mayor que b" (desigualdad estricta)
 a > b y se lee a es mayor que b (desigualdad estricta)") Desigualdades Dadas dos rectas que se cortan, llamadas ejes (rectangulares si son perpendiculares, y oblicuos en caso contrario), un punto puede situarse conociendo las distancias del mismo a los ejes,
Desigualdades Dadas dos rectas que se cortan, llamadas ejes (rectangulares si son perpendiculares, y oblicuos en caso contrario), un punto puede situarse conociendo las distancias del mismo a los ejes,
DIBUJO TÉCNICO. UNIDAD DIDÁCTICA 9: Geometría 2D (V)
") UNIDAD DIDÁCTICA 9: Geometría 2D (V) ÍNDICE Página: 1 CURVAS CÓNICAS. ELEMENTOS CARACTERÍSTICOS.. 2 2 TRAZADO MEDIANTE RADIOS VECTORES 4 3 RECTAS TANGENTES A CÓNICAS 5 3.1 CIRCUNFERENCIAS FOCALES 6 3.2
UNIDAD DIDÁCTICA 9: Geometría 2D (V) ÍNDICE Página: 1 CURVAS CÓNICAS. ELEMENTOS CARACTERÍSTICOS.. 2 2 TRAZADO MEDIANTE RADIOS VECTORES 4 3 RECTAS TANGENTES A CÓNICAS 5 3.1 CIRCUNFERENCIAS FOCALES 6 3.2
Covarianza y coeficiente de correlación
 Covarianza y coeficiente de correlación Cuando analizábamos las variables unidimensionales considerábamos, entre otras medidas importantes, la media y la varianza. Ahora hemos visto que estas medidas también
Covarianza y coeficiente de correlación Cuando analizábamos las variables unidimensionales considerábamos, entre otras medidas importantes, la media y la varianza. Ahora hemos visto que estas medidas también
Para cada cada valor de la función original lo multiplicas por 3 lo recorres 45 a la derecha y lo subes 5 unidades.
 3.5 Gráficas de las funciones: f(x) = a sen (bx + c) + d f(x) = a cos (bx + c) + d f(x) = a tan (bx + c) + d en donde a, b, c, y d son números reales En la sección 3.4 ya realizamos algunos ejemplos en
3.5 Gráficas de las funciones: f(x) = a sen (bx + c) + d f(x) = a cos (bx + c) + d f(x) = a tan (bx + c) + d en donde a, b, c, y d son números reales En la sección 3.4 ya realizamos algunos ejemplos en
TIPOS DE RESTRICCIONES
 RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
RESTRICCIONES: Las restricciones son reglas que determinan la posición relativa de las distintas geometrías existentes en el archivo de trabajo. Para poder aplicarlas con rigor es preciso entender el grado
Se llama dominio de una función f(x) a todos los valores de x para los que f(x) existe. El dominio se denota como Dom(f)
 a todos los valores de x para los que f(x) existe. El dominio se denota como Dom(f)") MATEMÁTICAS EJERCICIOS RESUELTOS DE FUNCIONES FUNCIONES A. Introducción teórica A.1. Definición de función A.. Dominio y recorrido de una función, f() A.. Crecimiento y decrecimiento de una función en
MATEMÁTICAS EJERCICIOS RESUELTOS DE FUNCIONES FUNCIONES A. Introducción teórica A.1. Definición de función A.. Dominio y recorrido de una función, f() A.. Crecimiento y decrecimiento de una función en
Funciones definidas a trozos
 Concepto de función Dominio de una función Características de las funciones Intersecciones con los ejes Crecimiento y decrecimiento Máximos y mínimos Continuidad y discontinuidad Simetrías Periodicidad
Concepto de función Dominio de una función Características de las funciones Intersecciones con los ejes Crecimiento y decrecimiento Máximos y mínimos Continuidad y discontinuidad Simetrías Periodicidad
Unidad: Representación gráfica del movimiento
 Unidad: Representación gráfica del movimiento Aplicando y repasando el concepto de rapidez Esta primera actividad repasa el concepto de rapidez definido anteriormente. Posición Esta actividad introduce
Unidad: Representación gráfica del movimiento Aplicando y repasando el concepto de rapidez Esta primera actividad repasa el concepto de rapidez definido anteriormente. Posición Esta actividad introduce
PARÁBOLA. 1) para la parte positiva: 2) para la parte negativa: 3) para la parte positiva: 4) para la parte negativa:
 para la parte positiva: 2) para la parte negativa: 3) para la parte positiva: 4) para la parte negativa:") Página 90 5 LA PARÁBOLA 5.1 DEFINICIONES La parábola es el lugar geométrico 4 de todos los puntos cuyas distancias a una recta fija, llamada, y a un punto fijo, llamado foco, son iguales entre sí. Hay
Página 90 5 LA PARÁBOLA 5.1 DEFINICIONES La parábola es el lugar geométrico 4 de todos los puntos cuyas distancias a una recta fija, llamada, y a un punto fijo, llamado foco, son iguales entre sí. Hay
LÍMITES Y CONTINUIDAD DE FUNCIONES
 Capítulo 9 LÍMITES Y CONTINUIDAD DE FUNCIONES 9.. Introducción El concepto de ite en Matemáticas tiene el sentido de lugar hacia el que se dirige una función en un determinado punto o en el infinito. Veamos
Capítulo 9 LÍMITES Y CONTINUIDAD DE FUNCIONES 9.. Introducción El concepto de ite en Matemáticas tiene el sentido de lugar hacia el que se dirige una función en un determinado punto o en el infinito. Veamos
Universidad de la Frontera. Geometría Anaĺıtica: Departamento de Matemática y Estadística. Cĺınica de Matemática. J. Labrin - G.
 Universidad de la Frontera Departamento de Matemática y Estadística Cĺınica de Matemática 1 Geometría Anaĺıtica: J. Labrin - G.Riquelme 1. Los puntos extremos de un segmento son P 1 (2,4) y P 2 (8, 4).
Universidad de la Frontera Departamento de Matemática y Estadística Cĺınica de Matemática 1 Geometría Anaĺıtica: J. Labrin - G.Riquelme 1. Los puntos extremos de un segmento son P 1 (2,4) y P 2 (8, 4).
Decisión: Indican puntos en que se toman decisiones: sí o no, o se verifica una actividad del flujo grama.
 Diagrama de Flujo La presentación gráfica de un sistema es una forma ampliamente utilizada como herramienta de análisis, ya que permite identificar aspectos relevantes de una manera rápida y simple. El
Diagrama de Flujo La presentación gráfica de un sistema es una forma ampliamente utilizada como herramienta de análisis, ya que permite identificar aspectos relevantes de una manera rápida y simple. El
Pronósticos. Pronósticos y gráficos Diapositiva 1
 Pronósticos Pronósticos Información de base Media móvil Pronóstico lineal - Tendencia Pronóstico no lineal - Crecimiento Suavización exponencial Regresiones mediante líneas de tendencia en gráficos Gráficos:
Pronósticos Pronósticos Información de base Media móvil Pronóstico lineal - Tendencia Pronóstico no lineal - Crecimiento Suavización exponencial Regresiones mediante líneas de tendencia en gráficos Gráficos:
Funciones polinomiales de grados cero, uno y dos
 Funciones polinomiales de grados cero, uno y dos A una función p se le llama polinomio si: p x = a n x n + a n 1 x n 1 + + a 2 x 2 + a 1x + a 0 Donde un entero no negativo y los números a 0, a 1, a 2,
Funciones polinomiales de grados cero, uno y dos A una función p se le llama polinomio si: p x = a n x n + a n 1 x n 1 + + a 2 x 2 + a 1x + a 0 Donde un entero no negativo y los números a 0, a 1, a 2,
MICROECONOMÍA II. PRÁCTICA TEMA II: Equilibrio parcial
 MICROECONOMÍA II PRÁCTICA TEMA II: Equilibrio parcial EJERCICIO 1 A) En equilibrio, la cantidad demandada coincide con la cantidad ofrecida, así como el precio de oferta y demanda. Por lo tanto, para hallar
MICROECONOMÍA II PRÁCTICA TEMA II: Equilibrio parcial EJERCICIO 1 A) En equilibrio, la cantidad demandada coincide con la cantidad ofrecida, así como el precio de oferta y demanda. Por lo tanto, para hallar
2 año secundario. Función Lineal MINISTERIO DE EDUCACIÓN. Se llama función lineal porque la potencia de la x es 1. Su gráfico es una recta.
 año secundario Función Lineal Se llama función lineal porque la potencia de la x es. Su gráfico es una recta. Y en general decimos que es de la forma : f(x)= a. x + b donde a y b son constantes, a recibe
año secundario Función Lineal Se llama función lineal porque la potencia de la x es. Su gráfico es una recta. Y en general decimos que es de la forma : f(x)= a. x + b donde a y b son constantes, a recibe
Colegio Las Tablas Tarea de verano Matemáticas 3º ESO
 Colegio Las Tablas Tarea de verano Matemáticas º ESO Nombre: C o l e g i o L a s T a b l a s Tarea de verano Matemáticas º ESO Resolver la siguiente ecuación: 5 5 6 Multiplicando por el mcm(,,6) = 6 y
Colegio Las Tablas Tarea de verano Matemáticas º ESO Nombre: C o l e g i o L a s T a b l a s Tarea de verano Matemáticas º ESO Resolver la siguiente ecuación: 5 5 6 Multiplicando por el mcm(,,6) = 6 y
Análisis de Sistemas Lineales: segunda parte
 UCV, Facultad de Ingeniería, Escuela de Ingeniería Eléctrica. Análisis de Sistemas Lineales: segunda parte Ebert Brea 7 de marzo de 204 Contenido. Análisis de sistemas en el plano S 2. Análisis de sistemas
UCV, Facultad de Ingeniería, Escuela de Ingeniería Eléctrica. Análisis de Sistemas Lineales: segunda parte Ebert Brea 7 de marzo de 204 Contenido. Análisis de sistemas en el plano S 2. Análisis de sistemas
, o más abreviadamente: f ( x)
") TEMA 5: 1. CONCEPTO DE FUNCIÓN Observa los siguientes ejemplos: El precio de una llamada telefónica depende de su duración. El consumo de gasolina de un coche depende de la velocidad del mismo. La factura
TEMA 5: 1. CONCEPTO DE FUNCIÓN Observa los siguientes ejemplos: El precio de una llamada telefónica depende de su duración. El consumo de gasolina de un coche depende de la velocidad del mismo. La factura
35 Facultad de Ciencias Universidad de Los Andes Mérida-Venezuela. Potencial Eléctrico
 q 1 q 2 Prof. Félix Aguirre 35 Energía Electrostática Potencial Eléctrico La interacción electrostática es representada muy bien a través de la ley de Coulomb, esto es: mediante fuerzas. Existen, sin embargo,
q 1 q 2 Prof. Félix Aguirre 35 Energía Electrostática Potencial Eléctrico La interacción electrostática es representada muy bien a través de la ley de Coulomb, esto es: mediante fuerzas. Existen, sin embargo,
PRÁCTICA Nº 4: SIMULACIÓN DE CIRCUITOS EN RÉGIMEN TRANSITORIO Y CORRIENTE ALTERNA
 PRÁCTICA Nº 4: SIMULACIÓN DE CIRCUITOS EN RÉGIMEN TRANSITORIO Y CORRIENTE ALTERNA 4.1. Medidas con el osciloscopio El osciloscopio es un instrumento que sirve para visualizar señales periódicas. Nos permite,
PRÁCTICA Nº 4: SIMULACIÓN DE CIRCUITOS EN RÉGIMEN TRANSITORIO Y CORRIENTE ALTERNA 4.1. Medidas con el osciloscopio El osciloscopio es un instrumento que sirve para visualizar señales periódicas. Nos permite,
Seminario Universitario Material para estudiantes. Física. Unidad 2. Vectores en el plano. Lic. Fabiana Prodanoff
 Seminario Universitario Material para estudiantes Física Unidad 2. Vectores en el plano Lic. Fabiana Prodanoff CONTENIDOS Vectores en el plano. Operaciones con vectores. Suma y producto por un número escalar.
Seminario Universitario Material para estudiantes Física Unidad 2. Vectores en el plano Lic. Fabiana Prodanoff CONTENIDOS Vectores en el plano. Operaciones con vectores. Suma y producto por un número escalar.
(A) Primer parcial. si 1 x 1; x 3 si x>1. (B) Segundo parcial
 Primer parcial. si 1 x 1; x 3 si x>1. (B) Segundo parcial") CÁLCULO DIFERENCIAL E INTEGRAL I EVALUACIÓN GLOBAL E700 1) x 5 > 1. A) Primer parcial ) Sean las funciones ft) t +,gy) y 4&hw) w. Encontrar f/h, g f, f g y sus dominios. ) Graficar la función x + six
CÁLCULO DIFERENCIAL E INTEGRAL I EVALUACIÓN GLOBAL E700 1) x 5 > 1. A) Primer parcial ) Sean las funciones ft) t +,gy) y 4&hw) w. Encontrar f/h, g f, f g y sus dominios. ) Graficar la función x + six
I. RELACIONES Y FUNCIONES 1.1. PRODUCTO CARTESIANO { }
 I. RELACIONES Y FUNCIONES PAREJAS ORDENADAS Una pareja ordenada se compone de dos elementos x y y, escribiéndose ( x, y ) donde x es el primer elemento y y el segundo elemento. Teniéndose que dos parejas
I. RELACIONES Y FUNCIONES PAREJAS ORDENADAS Una pareja ordenada se compone de dos elementos x y y, escribiéndose ( x, y ) donde x es el primer elemento y y el segundo elemento. Teniéndose que dos parejas
Geometría analítica. Impreso por Juan Carlos Vila Vilariño Centro I.E.S. PASTORIZA
 Conoce los vectores, sus componentes y las operaciones que se pueden realizar con ellos. Aprende cómo se representan las rectas y sus posiciones relativas. Impreso por Juan Carlos Vila Vilariño Centro
Conoce los vectores, sus componentes y las operaciones que se pueden realizar con ellos. Aprende cómo se representan las rectas y sus posiciones relativas. Impreso por Juan Carlos Vila Vilariño Centro
ESTATICA: TIPOS DE MAGNITUDES: CARACTERÍSTICAS DE UN VECTOR. Rama de la física que estudia el equilibrio de los cuerpos.
 ESTATICA: Rama de la física que estudia el equilibrio de los cuerpos. TIPOS DE MAGNITUDES: MAGNITUD ESCALAR: Es una cantidad física que se especifica por un número y una unidad. Ejemplos: La temperatura
ESTATICA: Rama de la física que estudia el equilibrio de los cuerpos. TIPOS DE MAGNITUDES: MAGNITUD ESCALAR: Es una cantidad física que se especifica por un número y una unidad. Ejemplos: La temperatura
4.2 CÓMO SE NOS PRESENTAN LAS FUNCIONES
 Tema 4 Funciones. Características - Matemáticas B 4º E.S.O. 1 TEMA 4 FUNCIONES. CARACTERÍSTICAS 4.1 CONCEPTOS BÁSICOS 3º 4.1.1 DEFINICIONES 3º Una función liga dos variables numéricas a las que, habitualmente,
Tema 4 Funciones. Características - Matemáticas B 4º E.S.O. 1 TEMA 4 FUNCIONES. CARACTERÍSTICAS 4.1 CONCEPTOS BÁSICOS 3º 4.1.1 DEFINICIONES 3º Una función liga dos variables numéricas a las que, habitualmente,
La magnitud vectorial mas simple es el desplazamiento (cambio de posición de un punto a otro de una partícula o de un cuerpo)
") Existen ciertas magnitudes que quedan perfectamente determinadas cuando se conoce el nombre de una unidad y el numero de veces que se ha tomado.estas unidades se llaman escalares (tiempo, volumen, longitud,
Existen ciertas magnitudes que quedan perfectamente determinadas cuando se conoce el nombre de una unidad y el numero de veces que se ha tomado.estas unidades se llaman escalares (tiempo, volumen, longitud,
Definición de vectores
 Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen: O también denominado Punto de aplicación. Es el punto exacto sobre
Definición de vectores Un vector es todo segmento de recta dirigido en el espacio. Cada vector posee unas características que son: Origen: O también denominado Punto de aplicación. Es el punto exacto sobre
CONCEPTOS DE LA FUERZA
 CONCEPTOS DE LA FUERZA PAPEL DE LA FUERZA EN EL RENDIMIENTO DEPORTIVO La mejora de la fuerza es un factor importante en todas las actividades deportivas, y en algunos casos determinantes (en el arbitraje
CONCEPTOS DE LA FUERZA PAPEL DE LA FUERZA EN EL RENDIMIENTO DEPORTIVO La mejora de la fuerza es un factor importante en todas las actividades deportivas, y en algunos casos determinantes (en el arbitraje
Osciloscopio Funciones
 Uso del osciloscopio para determinar las formas de onda Uno de los procedimientos para realizar diagnósticos acertados, en las reparaciones automotrices, es el buen uso del osciloscopio. Este instrumento
Uso del osciloscopio para determinar las formas de onda Uno de los procedimientos para realizar diagnósticos acertados, en las reparaciones automotrices, es el buen uso del osciloscopio. Este instrumento
Departamento de Matemáticas
 MA5 Clase 9: Campos Direccionales, Curvas Integrales. Eistencia y Unicidad Elaborado por los profesores Edgar Cabello y Marcos González La ecuación y = f(, y) determina el coeficiente angular de la tangente
MA5 Clase 9: Campos Direccionales, Curvas Integrales. Eistencia y Unicidad Elaborado por los profesores Edgar Cabello y Marcos González La ecuación y = f(, y) determina el coeficiente angular de la tangente
MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas
 Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema Representación gráfica de funciones reales de una variable real Elaborado
Universidad de Cádiz Departamento de Matemáticas MATEMÁTICAS para estudiantes de primer curso de facultades y escuelas técnicas Tema Representación gráfica de funciones reales de una variable real Elaborado
Estudio Gráfico de Funciones. Departamento de Matemáticas. IES Rosario de Acuña. Gijón 2009
 Estudio Gráfico de Funciones Departamento de Matemáticas. IES Rosario de Acuña. Gijón 2009 Índice 1. Función 2 1.1. Definición............................. 2 1.2. Clasificación............................
Estudio Gráfico de Funciones Departamento de Matemáticas. IES Rosario de Acuña. Gijón 2009 Índice 1. Función 2 1.1. Definición............................. 2 1.2. Clasificación............................
Profr. Efraín Soto Apolinar. La función lineal. y = a 0 + a 1 x. y = m x + b
 La función lineal Una función polinomial de grado uno tiene la forma: y = a 0 + a 1 x El semestre pasado estudiamos la ecuación de la recta. y = m x + b En la notación de funciones polinomiales, el coeficiente
La función lineal Una función polinomial de grado uno tiene la forma: y = a 0 + a 1 x El semestre pasado estudiamos la ecuación de la recta. y = m x + b En la notación de funciones polinomiales, el coeficiente
0.1. Sintonización de Controladores
 0.1. Sintonización de Controladores El diseño de controladores, tal como se mostró en la sección anterior, se realiza en función del conocimiento del proceso, es decir, a partir del modelo del proceso,
0.1. Sintonización de Controladores El diseño de controladores, tal como se mostró en la sección anterior, se realiza en función del conocimiento del proceso, es decir, a partir del modelo del proceso,
www.fundibeq.org Es de aplicación a aquellos estudios o situaciones en que es necesario priorizar entre un conjunto de elementos.
 GRAÁFICOS DE GESTIÓON (LINEALES, BARRAS Y TARTAS) 1.- INTRODUCCIÓN Este documento introduce los Gráficos de Gestión de uso más común y de mayor utilidad: Gráficos Lineales, Gráficos de Barras y Gráficos
GRAÁFICOS DE GESTIÓON (LINEALES, BARRAS Y TARTAS) 1.- INTRODUCCIÓN Este documento introduce los Gráficos de Gestión de uso más común y de mayor utilidad: Gráficos Lineales, Gráficos de Barras y Gráficos
http://www.cepamarm.es ACFGS - Matemáticas ESG - 05/2013 Pág. 1 de 17
 http://www.cepamarm.es ACFGS - Matemáticas ESG - 05/2013 Pág. 1 de 17 1 CONCEPTOS BÁSICOS 1.1 DEFINICIONES Una función liga dos variables numéricas a las que, habitualmente, se les llama x e y. x es la
http://www.cepamarm.es ACFGS - Matemáticas ESG - 05/2013 Pág. 1 de 17 1 CONCEPTOS BÁSICOS 1.1 DEFINICIONES Una función liga dos variables numéricas a las que, habitualmente, se les llama x e y. x es la
Unidad 6 Cálculo de máximos y mínimos
 Unidad 6 Cálculo de máimos y mínimos Objetivos Al terminar la unidad, el alumno: Utilizará la derivada para decidir cuándo una función es creciente o decreciente. Usará la derivada para calcular los etremos
Unidad 6 Cálculo de máimos y mínimos Objetivos Al terminar la unidad, el alumno: Utilizará la derivada para decidir cuándo una función es creciente o decreciente. Usará la derivada para calcular los etremos
TEORÍA TEMA 9. 2. Definición de ESFUERZOS CARACTERÍSTICOS ( Mf.; Q; N)
") 1. Definición de Viga de alma llena TEORÍA TEMA 9 2. Definición de ESFUERZOS CARACTERÍSTICOS ( Mf.; Q; N) 3. Determinación de los esfuerzos característicos i. Concepto de Polígonos de Presiones ii. Caso
1. Definición de Viga de alma llena TEORÍA TEMA 9 2. Definición de ESFUERZOS CARACTERÍSTICOS ( Mf.; Q; N) 3. Determinación de los esfuerzos característicos i. Concepto de Polígonos de Presiones ii. Caso
Tema 3. Medidas de tendencia central. 3.1. Introducción. Contenido
 Tema 3 Medidas de tendencia central Contenido 31 Introducción 1 32 Media aritmética 2 33 Media ponderada 3 34 Media geométrica 4 35 Mediana 5 351 Cálculo de la mediana para datos agrupados 5 36 Moda 6
Tema 3 Medidas de tendencia central Contenido 31 Introducción 1 32 Media aritmética 2 33 Media ponderada 3 34 Media geométrica 4 35 Mediana 5 351 Cálculo de la mediana para datos agrupados 5 36 Moda 6
Plan de clase (1/4) Intenciones didácticas: Que los alumnos reflexionen sobre la manera de ubicar puntos en el plano cartesiano.
 Intenciones didácticas: Que los alumnos reflexionen sobre la manera de ubicar puntos en el plano cartesiano.") Plan de clase (1/4) Intenciones didácticas: Que los alumnos reflexionen sobre la manera de ubicar puntos en el plano cartesiano. Consigna: En equipos, resuelvan la siguiente actividad. A partir de la siguiente
Plan de clase (1/4) Intenciones didácticas: Que los alumnos reflexionen sobre la manera de ubicar puntos en el plano cartesiano. Consigna: En equipos, resuelvan la siguiente actividad. A partir de la siguiente
Módulo 9 Sistema matemático y operaciones binarias
 Módulo 9 Sistema matemático y operaciones binarias OBJETIVO: Identificar los conjuntos de números naturales, enteros, racionales e irracionales; resolver una operación binaria, representar un número racional
Módulo 9 Sistema matemático y operaciones binarias OBJETIVO: Identificar los conjuntos de números naturales, enteros, racionales e irracionales; resolver una operación binaria, representar un número racional
Tema 2. Espacios Vectoriales. 2.1. Introducción
 Tema 2 Espacios Vectoriales 2.1. Introducción Estamos habituados en diferentes cursos a trabajar con el concepto de vector. Concretamente sabemos que un vector es un segmento orientado caracterizado por
Tema 2 Espacios Vectoriales 2.1. Introducción Estamos habituados en diferentes cursos a trabajar con el concepto de vector. Concretamente sabemos que un vector es un segmento orientado caracterizado por
1. Encontrar el dominio de la función racional. 2. Encontrar los interceptos con x y y de la función racional.
 1. Encontrar el dominio de la función racional. h(x) x 2 3x 1 (x 2 4)(x 2 + 11x + 24) Para encontrar el dominio de una función racional debemos encontrar los valores de la variable que hacen cero el denominador.
1. Encontrar el dominio de la función racional. h(x) x 2 3x 1 (x 2 4)(x 2 + 11x + 24) Para encontrar el dominio de una función racional debemos encontrar los valores de la variable que hacen cero el denominador.
Funciones, x, y, gráficos
 Funciones, x, y, gráficos Vamos a ver los siguientes temas: funciones, definición, dominio, codominio, imágenes, gráficos, y algo más. Recordemos el concepto de función: Una función es una relación entre
Funciones, x, y, gráficos Vamos a ver los siguientes temas: funciones, definición, dominio, codominio, imágenes, gráficos, y algo más. Recordemos el concepto de función: Una función es una relación entre
Qcad. Es un programa de diseña asistido por ordenador en 2 dimensiones.
 Qcad Es un programa de diseña asistido por ordenador en 2 dimensiones. 1. La ventana del Qcad Barra de títulos Barra de menús Barra de herramientas Área de dibujo Barra de herramientas de dibujo Barra
Qcad Es un programa de diseña asistido por ordenador en 2 dimensiones. 1. La ventana del Qcad Barra de títulos Barra de menús Barra de herramientas Área de dibujo Barra de herramientas de dibujo Barra
Ejercicios de Trigonometría
 Ejercicios de Trigonometría 1) Indica la medida de estos ángulos en radianes: a) 0º b) 45º c) 60º d) 120º Recuerda que 360º son 2π radianes, con lo que para hacer la conversión realizaremos una simple
Ejercicios de Trigonometría 1) Indica la medida de estos ángulos en radianes: a) 0º b) 45º c) 60º d) 120º Recuerda que 360º son 2π radianes, con lo que para hacer la conversión realizaremos una simple
CÁLCULO PARA LA INGENIERÍA 1
 CÁLCULO PARA LA INGENIERÍA 1 PROBLEMAS RESUELTOS Tema 3 Derivación de funciones de varias variables 3.1 Derivadas y diferenciales de funciones de varias variables! 1. Derivadas parciales de primer orden.!
CÁLCULO PARA LA INGENIERÍA 1 PROBLEMAS RESUELTOS Tema 3 Derivación de funciones de varias variables 3.1 Derivadas y diferenciales de funciones de varias variables! 1. Derivadas parciales de primer orden.!
Representación de señales de audio
 Representación de señales de audio Emilia Gómez Gutiérrez Síntesi i Processament del So I Departament de Sonologia Escola Superior de Musica de Catalunya Curso 2009-2010 emilia.gomez@esmuc.cat 28 de septiembre
Representación de señales de audio Emilia Gómez Gutiérrez Síntesi i Processament del So I Departament de Sonologia Escola Superior de Musica de Catalunya Curso 2009-2010 emilia.gomez@esmuc.cat 28 de septiembre