Tema 5: SEGMENTACIÓN (I) I N G E N I E R Í A I N F O R M Á T I C A
|
|
|
- Valentín Sánchez Ortiz
- hace 5 años
- Vistas:
Transcripción
1 Tema 5: SEGMENTACIÓN (I) 1 I N G E N I E R Í A I N F O R M Á T I C A
2 Tema 5: Segmentación 2 El propósito de la segmentación de imágenes consiste en dividir una imagen en regiones significativas con respecto a una aplicación particular. El nivel al que se llevará a cabo esta subdivisión dependerá del problema a resolver. Es decir, el proceso de segmentación debería detenerse en el momento en que los objetos de interés para la aplicación hayan sido aislados. Su resultado es una representación simplificada de la imagen, mostrando los grupos significativos que la componen.
3 Tema 5: Segmentación Los algoritmos de segmentación se basan en propiedades básicas de los valores del nivel de gris: 3 - Discontinuidad: Los bordes de las regiones son suficientemente diferentes del fondo lo que permite la detección de los mismos basándonos en cambios bruscos de nivel de intensidad. - Similitud: Se divide la imagen basándose en la búsqueda de zonas que tengan valores similares, conforme a unos criterios prefijados. - Umbralización: Un método básico para diferenciar un objeto del fondo de la imagen es mediante una simple binarización.
4 Tema 5: Segmentación 4 Observación: Hay que tener en cuenta que al ser un proceso enormemente complejo, no hay soluciones perfectas. Cada solución tendrá una serie de ventajas e inconvenientes.

5 Tema 5: Segmentación 5
6 5.1. Detección de discontinuidades 6 F U N D A M E N T O S
 usan técnicas de derivación.")
7 Tema 5: Segmentación Los métodos de segmentación basados en la detección de cambios bruscos de intensidad (nivel de gris) usan técnicas de derivación. 7
8 Tema 5: Segmentación Los métodos de segmentación basados en la detección de cambios bruscos de intensidad (nivel de gris) usan técnicas de derivación. 8
9 Tema 5: Segmentación 9 - La respuesta a puntos aislados es mucho más fuerte por parte de la 2ª derivada. - La 2ª derivada también da una respuesta más fuerte en la detección de líneas. - El signo de la 2º derivada es usado para determinar si un borde es una transición de la luz a la oscuridad o de la oscuridad a la luz.
10 Tema 5: Segmentación 10 - La respuesta a puntos aislados es mucho más fuerte por parte de la 2ª derivada. - La 2ª derivada también da una respuesta más fuerte en la detección de líneas. - El signo de la 2º derivada es usado para determinar si un borde es una transición de la luz a la oscuridad o de la oscuridad a la luz.
11 Tema 5: Segmentación 11 - La respuesta a puntos aislados es mucho más fuerte por parte de la 2ª derivada. - La 2ª derivada también da una respuesta más fuerte en la detección de líneas. - El signo de la 2º derivada es usado para determinar si un borde es una transición de la luz a la oscuridad o de la oscuridad a la luz.
12 5.1. Detección de discontinuidades 12 D E T E C C I Ó N D E P U N T O S A I S L A D O S
13 Tema 5: Segmentación de imágenes Detección de puntos aislados. Un punto aislado de una imagen tiene un tono de gris que difiere significativamente de los tonos de gris de sus píxeles vecinos, es decir, de los ocho píxeles de su entorno 3 3. Una máscara (Laplaciano) para detectar un punto aislado es la siguiente: 13 Diremos que un píxel es un punto aislado si el resultado de aplicar la máscara sobre el píxel (en valor absoluto) es mayor o igual que un cierto valor umbral T, fijado por el decisor. Dicho valor depende de la aplicación que estemos realizando.
 R(x,y) g(x,y) punto aislado Imagen original Resultado de aplicar Resultado de usar con una")
14 Tema 5: Segmentación de imágenes Detección de puntos aislados. 14 f (x,y) R(x,y) g(x,y) punto aislado Imagen original Resultado de aplicar Resultado de usar con una porosidad la máscara la transformación
15 Tema 5: Segmentación de imágenes Detección de puntos aislados. 15 Máscara Imagen original Resultado de aplicar la máscara
16 Tema 5: Segmentación de imágenes Detección de puntos aislados. 16 Máscara Imagen original Resultado de aplicar la máscara - Si 0 < T 9: 4 puntos
17 Tema 5: Segmentación de imágenes Detección de puntos aislados. 17 Máscara Imagen original Resultado de aplicar la máscara - Si 0 < T 9: 4 puntos - Si 9 < T 72: 1 punto
18 Tema 5: Segmentación de imágenes Detección de puntos aislados. 18 Máscara Imagen original Resultado de aplicar la máscara - Si 0 < T 9: 4 puntos - Si 9 < T 72: 1 punto - Si T > 72: Ningún punto
19 5.1. Detección de discontinuidades 19 D E T E C C I Ó N D E L Í N E A S
20 Tema 5: Segmentación de imágenes Detección de líneas. 20 La 2º derivada da una respuesta más fuerte a la detección de líneas por lo tanto, también se usa el Laplaciano para este tipo de discontinuidad
21 Tema 5: Segmentación de imágenes Detección de líneas. 21 El efecto de línea doble que produce el Laplaciano debe ser tratado adecuadamente. Imagen Laplaciana: Gris medio = ceros Gris oscuro = negativos Gris claro = positivos Valor absoluto del Laplaciano: duplica el grosor de las líneas Sólo los valores positivos del Laplaciano: líneas más delgadas



22 Tema 5: Segmentación de imágenes Detección de líneas. 22 El efecto de línea doble que produce el Laplaciano debe ser tratado adecuadamente. Observar que cuando las líneas son anchas en relación con la máscara Laplaciana (mínimo 5 píxeles de ancho), estás son separadas por un cero valle. Este caso es tratado con métodos de detección de bordes, no de líneas.
23 Tema 5: Segmentación de imágenes Detección de líneas. 23 El detector Laplaciano es isotrópico, es decir, su respuesta es independiente de la dirección (horizontal, vertical y dos diagonales) de las líneas. Sin embargo, frecuentemente estamos interesados en detectar líneas en una determinada dirección. Los píxeles que forman parte de una línea horizontal, vertical o diagonal (de un pixel de ancha), tendrán respuestas extremas ante alguna de las máscaras siguientes:
24 Tema 5: Segmentación de imágenes Detección de líneas Sección de imagen Máscara Resultado de aplicar la máscara sin procesar el borde.
25 Tema 5: Segmentación de imágenes Detección de líneas Sección de imagen Máscara Valor absoluto y umbralización con T=20
26 Tema 5: Segmentación de imágenes Detección de líneas Sección de imagen Máscara Resultado de aplicar la máscara sin procesar el borde. No detecta la línea!

 g = resultado de aplicar la máscara parea")
27 Tema 5: Segmentación de imágenes Detección de líneas. 27 Línea de más de un pixel de ancho ( cero valle ) g = resultado de aplicar la máscara parea detectar líneas de +45º Línea de un pixel de ancho

28 Tema 5: Segmentación de imágenes Detección de líneas. 28 h = valores positivos de g g = resultado de aplicar la máscara parea detectar líneas de +45º Valores tales que g T, T = valor máximo h
29 5.1. Detección de discontinuidades 29 D E T E C C I Ó N D E B O R D E S

30 Tema 5: Segmentación de imágenes 30 Borde de una imagen digital en escala de grises: Borde ideal Borde rampa Forma un camino de un píxel de ancho en los que se produce un cambio en el nivel de gris, perpendicularmente. Forma un conjunto de píxeles conexos en los que se produce, en una determinada dirección, una variación gradual en el nivel de gris.

31 Tema 5: Segmentación de imágenes Borde de una imagen digital en escala de grises: 31
32 Tema 5: Segmentación de imágenes 32 Un píxel pertenece a un borde si se produce un cambio brusco entre niveles de grises con sus vecinos. Por tanto, como ya hemos comentado, el fundamento para la detección de bordes está en la aplicación del operador derivada en un entorno de vecindad. Volvemos a analizar la respuestas de la derivada 1ª y 2ª con un ejemplo:
33 Tema 5: Segmentación de imágenes 33 La primera derivada toma un valor máximo o mínimo justamente cuando en la transición se pasa de cóncavo a convexo y viceversa, esto es en el punto de inflexión del borde. Si tomamos la segunda derivada, el punto de inflexión de la primera coincidirá con un paso por cero, lo que llamaremos zerocrossing. Ambos razonamientos se usarán para la detección de bordes.
34 Tema 5: Segmentación de imágenes 34 Inconveniente: La presencia de ruido en la imagen produce falsos bordes al aplicar los operadores derivadas. Por esta razón, la detección de bordes está ligada a etapas de eliminación del ruido.
35 Tema 5: Segmentación de imágenes 35 Inconveniente: La presencia de ruido en la imagen produce falsos bordes al aplicar los operadores derivadas. Por esta razón, la detección de bordes está ligada a etapas de eliminación del ruido. Pasos fundamentales en la detección de bordes: - Paso 1: Realizar un suavizado de la imagen para eliminar el ruido. - Paso 2: Detectar los posibles candidatos a ser puntos del borde. - Paso 3: Seleccionar, de entre los candidatos, aquellos que pertenecen realmente al borde.
36 Tema 5: Segmentación de imágenes 36 Técnicas de detección de bordes: - Detección básica: Operadores gradiente - Operador cruzado de Roberts - Operador de Prewitt - Operador de Sobel - Técnicas más avanzadas: - Marr-Hildreth - Canny
37 Operadores gradiente: Tema 5: Segmentación de imágenes 37 - El operador gradiente sobre un pixel (x,y) de la imagen retorna un vector que indica la dirección de máxima variabilidad de la intensidad y su nivel de variación. Magnitud M(x,y) Dirección α x, y - Obsérvese que g x, g y y M(x,y) son imágenes del mismo tamaño que la imagen original.
38 Operadores gradiente: Tema 5: Segmentación de imágenes 38 - Un píxel se considerará que pertenece al borde si el módulo del gradiente supera un cierto umbral T. - En la práctica, generalmente se establece como umbral, T, cuando el módulo del vector gradiente está por encima del 70% al 80% del valor máximo de intensidad detectado en la imagen


39 Operadores gradiente: Tema 5: Segmentación de imágenes 39 Apunta en dirección perpendicular al borde.

40 Operadores gradiente: Tema 5: Segmentación de imágenes 40
41 Operadores gradiente: Tema 5: Segmentación de imágenes - Máscaras que modelan operadores gradiente: 41
42 Operadores gradiente: Tema 5: Segmentación de imágenes 42 - Máscaras que modelan operadores gradiente: Detecta mejor los bordes horizontales y verticales. Mejora su localización en los bordes diagonales. Muy sensible al ruido al ser máscaras muy pequeñas.

43 Ejemplo Prewitt y Sobel: Tema 5: Segmentación de imágenes 43

44 Tema 5: Segmentación de imágenes Ejemplo Sobel: 44 Imagen original g x g y g x + g y

45 Tema 5: Segmentación de imágenes Ejemplo Sobel: 45 Imagen original suavizada con un filtro de la media 5 x 5 g x g y g x + g y

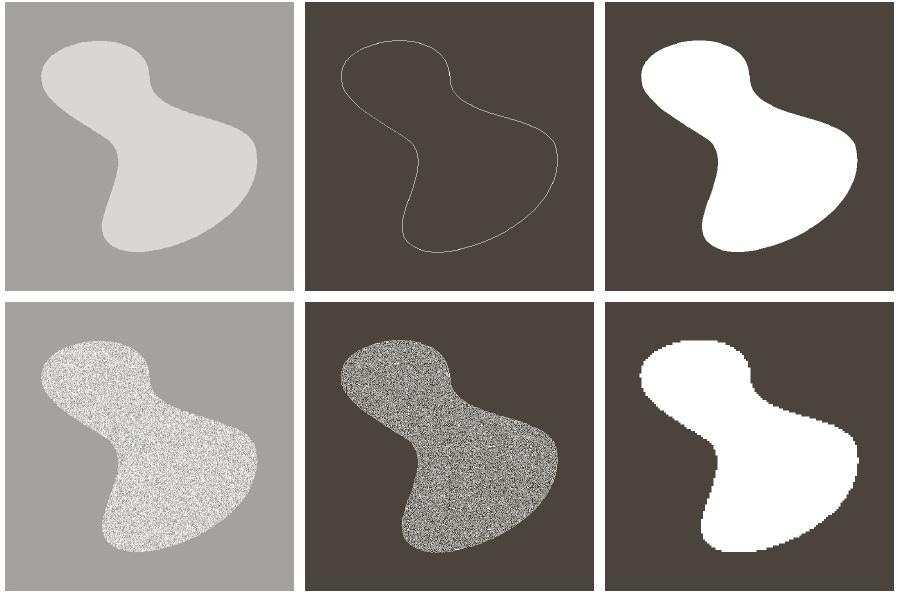
46 Gradiente + umbralización: Tema 5: Segmentación de imágenes 46 En algunas ocasiones es conveniente realizar una umbralización de la imagen gradiente obtenida. a) Imagen resultante de aplicar Sobel b) Versión umbralizada tomando como umbral el 33% del valor de intensidad más alto de la imagen.
47 Gradiente + umbralización: Tema 5: Segmentación de imágenes 47 En algunas ocasiones es conveniente realizar una umbralización de la imagen gradiente obtenida. a) Imagen resultante de aplicar Sobel a la imagen suavizada b) Versión umbralizada tomando como umbral el 33% del valor de intensidad más alto de la imagen.

48 Gradiente + umbralización: Tema 5: Segmentación de imágenes 48 En algunas ocasiones es conveniente realizar una umbralización de la imagen gradiente obtenida. En la segunda imagen se produce una mejor conexión de los bordes (edges).
49 Enlazado de bordes: Tema 5: Segmentación de imágenes 49 - En la práctica, el conjunto de píxeles que se obtiene, rara vez caracteriza completamente un borde debido al ruido, a una iluminación no uniforme, etc. Por ello, los algoritmos de detección de bordes, normalmente se siguen de procedimientos de enlazado de los mismos. - Un procesamiento local consiste en analizar las características de los vecinos en un entorno de cada uno de los píxeles de la imagen que se han detectado como borde. Todos los puntos que son similares en algún sentido predeterminado, se enlazan.
50 Enlazado de bordes: Tema 5: Segmentación de imágenes 50 Las dos principales propiedades utilizadas en este tipo de análisis para establecer la similitud de los píxeles del borde son: - La intensidad de la respuesta del operador: Un píxel del borde de coordenadas (x',y') que se encuentra en un entorno de vecindad determinado de un píxel de coordenadas (x,y), tiene intensidad similar si: donde T es un valor umbral no negativo.
51 Enlazado de bordes: Tema 5: Segmentación de imágenes 51 Las dos principales propiedades utilizadas en este tipo de análisis para establecer la similitud de los píxeles del borde son: - La dirección del gradiente. Un píxel del borde de coordenadas (x',y') que se encuentra en un entorno de un píxel de coordenadas (x,y), tiene ángulo similar si: donde A es un valor umbral no negativo.
 b) c) d) c) Componente y del gradiente (g y ) usando Sobel.")
52 Enlazado de bordes: Tema 5: Segmentación de imágenes 52 a) Imagen original b) Componente x del gradiente (g x ) usando Sobel. a) b) c) d) c) Componente y del gradiente (g y ) usando Sobel. d) Resultado de enlazar todos los puntos que tienen módulo del gradiente mayor que 25 y cuya dirección del gradiente no difiere más de 15º.
53 Tema 5: Segmentación de imágenes 53 Técnicas de detección de bordes: - Detección básica: Operadores gradiente - Operador cruzado de Roberts - Operador de Prewitt - Operador de Sobel - Otras, por ejemplo Máscaras de Kirsch - Técnicas más avanzadas: - Marr-Hildreth - Canny
54 Tema 5: Segmentación de imágenes 54 TÉCNICAS MÁS AVANZADAS: - Los métodos anteriores están basados simplemente en filtrar la imagen aplicando una o varias máscaras de convolución, sin ninguna previsión de las características del borde ni el contenido de ruido. - Las técnicas que estudiamos a continuación hacen un intento de mejorar los métodos de detección simple, teniendo en cuenta factores como el ruido de la imagen y la naturaleza de los bordes.
55 Tema 5: Segmentación de imágenes 55 TÉCNICAS MÁS AVANZADAS: Un detector de bordes es considerado óptimo si cumple los siguientes puntos: - Buena detección: el algoritmo debe marcar el mayor número real en los bordes de la imagen como sea posible. - Buena localización: los bordes de marca deben estar lo más cerca posible del borde de la imagen real. - Respuesta mínima: El borde de una imagen sólo debe ser marcado una vez, y siempre que sea posible, el ruido de la imagen no debe crear falsos bordes.
56 Detector Marr-Hildreth: Tema 5: Segmentación de imágenes 56 Los pasos a seguir son: - Paso 1: Aplicar un filtro gaussiano. - Paso 2: Calcular el Laplaciano de la imagen resultante. - Paso 3: Determinar los píxeles de paso por cero.
57 Detector Marr-Hildreth: Tema 5: Segmentación de imágenes - Paso 1: Filtro gaussiano 57 Realizar una convolución a la imagen con una máscara de tamaño n que modelice la función gaussiana bidimensional: donde σ representa la desviación típica.

58 Detector Marr-Hildreth: Tema 5: Segmentación de imágenes - Paso 1: Filtro gaussiano 58 Recordar que la convolución de una imagen con una función de esta forma emborrona la imagen con un grado de emborronamiento proporcional a σ. Por lo tanto, produce una reducción del ruido.
59 Detector Marr-Hildreth: Tema 5: Segmentación de imágenes 59 - Paso 2: Laplaciano del gaussiano Calcular el Laplaciano de la imagen resultante del filtro Gaussiano. Usar por ejemplo la máscara
60 60 Detector Marr-Hildreth: - Paso 2: Laplaciano del gaussiano Función Laplaciano del Gaussiano (Paso 1 + Paso 2): Tema 5: Segmentación de imágenes e y x y x y G x G G
61 Tema 5: Segmentación de imágenes Detector Marr-Hildreth: Laplaciano del Gaussiano (LoG) 61 f(x,y) imagen original Filtro gaussiano de paso bajo G(x,y) imagen suavizada Laplaciano 2 G( x, y) Máscara 5x5 directa

62 Detector Marr-Hildreth: Tema 5: Segmentación de imágenes - Paso 3: Determinar los píxeles de paso por cero. 62
63 Detector Marr-Hildreth: Tema 5: Segmentación de imágenes - Paso 3: Determinar los píxeles de paso por cero. 63 Recuerda que los píxeles del borde son aquellos tales que el Laplaciano de dos de sus vecinos en posiciones opuestas tienen distinto signo (píxeles de paso por cero).
64 Detector Marr-Hildreth: Tema 5: Segmentación de imágenes - Paso 3: Determinar los píxeles de paso por cero. 64 Recuerda que los píxeles del borde son aquellos tales que el Laplaciano de dos de sus vecinos en posiciones opuestas tienen distinto signo (píxeles de paso por cero). Un método para detectar dichos píxeles p consiste en usar entornos de vecindad 3 x 3 centrados en p de forma que p es un pixel de paso por cero si la diferencia numérica entre posiciones opuestas supera un cierto umbral.
65 Detector Marr-Hildreth: Tema 5: Segmentación de imágenes 65 f(x,y) imagen original Filtro gaussiano de paso bajo G(x,y) imagen suavizada Laplaciano del gaussiano con la máscara 2 G( x, y) Zero-crossing


66 Detector Marr-Hildreth: Tema 5: Segmentación de imágenes 66
67 Detector Canny: Tema 5: Segmentación de imágenes 67 - Es el operador borde más potente. Se caracteriza por evitar la ruptura de los bordes de los objetos. - Su fundamento se basa en un proceso de optimización, teniendo en cuenta los siguientes dos objetivos a maximizar: 1. Disminuir todo lo posible la distancia entre el borde detectado y el borde real. 2. No identificar un borde por un único pixel, sino por un conjunto de píxeles que tengan cierta conectividad.
68 Detector Canny: Tema 5: Segmentación de imágenes 68 Los pasos principales del algoritmo son: - Paso 1: Se realiza una convolución con un filtro gaussiano para suavizar la imagen (eliminar ruidos).
69 Detector Canny: Tema 5: Segmentación de imágenes 69 Los pasos principales del algoritmo son: - Paso 1: Se realiza una convolución con un filtro gaussiano para suavizar la imagen (eliminar ruidos). - Paso 2: Se calcula la imagen gradiente de la imagen suavizada. También se determina la dirección del vector gradiente. M(x,y) g x + g y α(x,y) = tan -1 (g y /g x )
, considerando un entorno 3 x 3.")
70 Detector Canny: Tema 5: Segmentación de imágenes 70 - Paso 3: Se aplica un procedimiento para eliminar (igualar a cero) aquellos píxeles que no son máximos locales en la dirección del gradiente (que es perpendicular al borde), considerando un entorno 3 x 3.
71 Detector Canny: Tema 5: Segmentación de imágenes 71 - Paso 3: Se aplica un procedimiento para eliminar (igualar a cero) aquellos píxeles que no son máximos locales en la dirección del gradiente (que es perpendicular al borde), considerando un entorno 3 x 3. Sean d 1, d 2, d 3 y d 4 las cuatro direcciones básicas (horizontal, -45º, vertical y +45º). Entonces, para cada pixel (x,y): 1. Encuentra la dirección d k más cercana a α(x,y). 2. Si M(x,y) es menor que al menos uno de sus dos vecinos a lo largo de la dirección d k, sea g N (x,y)=0; en caso contrario g N (x,y)=m(x,y).
72 Detector Canny: Tema 5: Segmentación de imágenes 72 - Paso 4: Se realiza un proceso de doble umbralización para determinar los píxeles del borde: - se marcan los píxeles con valor por encima de un umbral T 1 (se localizan las semillas borde); - se marcan aquellos píxeles conectados a los primeros cuyo valor esté por encima de un segundo umbral T 2 (T 2 < T 1 ). Esto eliminará falsos bordes al mismo tiempo que permite un resultado conexo.
73 Detector Canny: Tema 5: Segmentación de imágenes 73 El filtro Gaussiano se ha realizado para σ=4 y una máscara de tamaño 25x25. Los umbrales considerados han sido T 1 =0.1 y T 2 =0.04.

74 Comparando Sobel y Canny: Tema 5: Segmentación de imágenes 74


75 Tema 5: Segmentación de imágenes Comparando Marr-Hildreth y Canny: 75

76 Tema 5: Segmentación de imágenes 76
77 Tema 5: Segmentación de imágenes 77 Resumen: (1) La detección de bordes usando operadores de aproximación del gradiente tiende a funcionar bien en los casos en que se involucran imágenes con transiciones de intensidad claramente definidas y ruidos relativamente bajos. (2)Los pasos por cero ofrecen una alternativa en los casos en que los bordes están emborronados o cuando está presente un alto contenido de ruido. El precio a pagar por estas ventajas es el incremento de complejidad de cálculo y tiempo. (3)El algoritmo de Canny es el que ofrece mejores resultados para bordes de imágenes con ruido gaussiano. b)
Segmentación de imágenes. Procesamiento de imágenes biomédicas Curso 2011
 Segmentación de imágenes Procesamiento de imágenes biomédicas Curso 2011 Introducción Hasta ahora el procesamiento digital de una imagen implicaba, una imagen de entrada y una imagen de salida. Ahora con
Segmentación de imágenes Procesamiento de imágenes biomédicas Curso 2011 Introducción Hasta ahora el procesamiento digital de una imagen implicaba, una imagen de entrada y una imagen de salida. Ahora con
Tema 2: PROCESAMIENTO EN EL DOMINIO ESPACIAL (Parte 2)
") Tema 2: PROCESAMIENTO EN EL DOMINIO ESPACIAL (Parte 2) 1 I N G E N I E R Í A I N F O R M Á T I C A D P T O. M A T E M Á T I C A A P L I C A D A I 2 ÍNDICE: Filtrado espacial Filtros de suavizado Filtros
Tema 2: PROCESAMIENTO EN EL DOMINIO ESPACIAL (Parte 2) 1 I N G E N I E R Í A I N F O R M Á T I C A D P T O. M A T E M Á T I C A A P L I C A D A I 2 ÍNDICE: Filtrado espacial Filtros de suavizado Filtros
Extracción de Bordes
 Visión por Computadora Unidad IV Extracción de Bordes Rogelio Ferreira Escutia Contenido 1) Conceptos sobre Bordes 2) Extracción de bordes por Derivadas 3) Operadores de Primera Derivada 1) Conceptos sobre
Visión por Computadora Unidad IV Extracción de Bordes Rogelio Ferreira Escutia Contenido 1) Conceptos sobre Bordes 2) Extracción de bordes por Derivadas 3) Operadores de Primera Derivada 1) Conceptos sobre
Tema 5. Detección de bordes
 1 Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández GRUPO DE TECNOLOGÍA INDUSTRIAL Tabla de Contenidos Deinición de Borde Extracción de Bordes Comparación de Funciones Locales Comparación
1 Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández GRUPO DE TECNOLOGÍA INDUSTRIAL Tabla de Contenidos Deinición de Borde Extracción de Bordes Comparación de Funciones Locales Comparación
Tema 5: SEGMENTACIÓN (II) I N G E N I E R Í A I N F O R M Á T I C A
 I N G E N I E R Í A I N F O R M Á T I C A") Tema 5: SEGMENTACIÓN (II) 1 I N G E N I E R Í A I N F O R M Á T I C A Tema 5: Segmentación Los algoritmos de segmentación se basan en propiedades básicas de los valores del nivel de gris: 2 - Discontinuidad:
Tema 5: SEGMENTACIÓN (II) 1 I N G E N I E R Í A I N F O R M Á T I C A Tema 5: Segmentación Los algoritmos de segmentación se basan en propiedades básicas de los valores del nivel de gris: 2 - Discontinuidad:
Tema 5: SEGMENTACIÓN (II) I N G E N I E R Í A I N F O R M Á T I C A
 I N G E N I E R Í A I N F O R M Á T I C A") Tema 5: SEGMENTACIÓN (II) 1 I N G E N I E R Í A I N F O R M Á T I C A Tema 5: Segmentación Los algoritmos de segmentación se basan en propiedades básicas de los valores del nivel de gris: 2 - Discontinuidad:
Tema 5: SEGMENTACIÓN (II) 1 I N G E N I E R Í A I N F O R M Á T I C A Tema 5: Segmentación Los algoritmos de segmentación se basan en propiedades básicas de los valores del nivel de gris: 2 - Discontinuidad:
Capítulo 2: Segmentación de imágenes
 Capítulo 2: Segmentación de imágenes 2.1.- Introducción Como se ha comentado en la presentación, la segmentación de la imagen es el proceso que divide una imagen en regiones u objetos cuyos píxeles poseen
Capítulo 2: Segmentación de imágenes 2.1.- Introducción Como se ha comentado en la presentación, la segmentación de la imagen es el proceso que divide una imagen en regiones u objetos cuyos píxeles poseen
Segmentación de imágenes biomédicas
 Segmentación de imágenes biomédicas Definición de segmentación La segmentación es la partición de una imagen, en un subconjunto regiones homogéneas en base a una característica (intensidad, textura,...).
Segmentación de imágenes biomédicas Definición de segmentación La segmentación es la partición de una imagen, en un subconjunto regiones homogéneas en base a una característica (intensidad, textura,...).
Técnicas de inteligencia artificial. Visión Artificial Detección de aristas y puntos característicos
 Técnicas de inteligencia artificial Visión Artificial Detección de aristas y puntos característicos Indice Detección de aristas Algoritmo de Canny Algoritmo de Susan Aristas ( Edges ) Operadores de gradiente:
Técnicas de inteligencia artificial Visión Artificial Detección de aristas y puntos característicos Indice Detección de aristas Algoritmo de Canny Algoritmo de Susan Aristas ( Edges ) Operadores de gradiente:
T5. Detección de bordes
 Índice Fundamentos de Visión por Computador Sistemas Inormáticos Avanzados Introducción ( min.) Qué es un borde? Pasos en la detección de bordes basados en gradiente ( h.) Qué es gradiente? de bordes basados
Índice Fundamentos de Visión por Computador Sistemas Inormáticos Avanzados Introducción ( min.) Qué es un borde? Pasos en la detección de bordes basados en gradiente ( h.) Qué es gradiente? de bordes basados
Contornos de objetos. Marcados por varios usuarios.
 DETECCIÓN DE CONTORNOS Contornos de objetos Marcados por varios usuarios http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/bench/html/images.html Contornos de objetos a partir
DETECCIÓN DE CONTORNOS Contornos de objetos Marcados por varios usuarios http://www.eecs.berkeley.edu/research/projects/cs/vision/grouping/segbench/bench/html/images.html Contornos de objetos a partir
Tema 4:Segmentación de imágenes
 Tema 4:Segmentación de imágenes La segmentación de imágenes divide la imagen en sus partes constituyentes hasta un nivel de subdivisión en el que se aíslen las regiones u objetos de interés. Los algoritmos
Tema 4:Segmentación de imágenes La segmentación de imágenes divide la imagen en sus partes constituyentes hasta un nivel de subdivisión en el que se aíslen las regiones u objetos de interés. Los algoritmos
Procesamiento Digital de Imágenes LCC-594
 Procesamiento Digital de Imágenes LCC-594 Benemérita Universidad Autónoma de Puebla Facultad de Ciencias de la Computación Daniel Alejandro Valdés Amaro, Ph.D 4. Operaciones regionales Objetivo: Conocer
Procesamiento Digital de Imágenes LCC-594 Benemérita Universidad Autónoma de Puebla Facultad de Ciencias de la Computación Daniel Alejandro Valdés Amaro, Ph.D 4. Operaciones regionales Objetivo: Conocer
CAPITULO 3: PASOS REALIZADOS PARA LA DETECCIÓN DE BORDES DE IMÁGENES A COLOR
 CAPITULO 3: PASOS REALIZADOS PARA LA DETECCIÓN DE BORDES DE IMÁGENES A COLOR El algoritmo realizado para la detección de bordes de imágenes a color se basa en el operador Canny. La filosofía del operador
CAPITULO 3: PASOS REALIZADOS PARA LA DETECCIÓN DE BORDES DE IMÁGENES A COLOR El algoritmo realizado para la detección de bordes de imágenes a color se basa en el operador Canny. La filosofía del operador
Detección de bordes en una imagen.
 Detección de bordes en una imagen. Departamento de Ingeniería electrónica, Telecomunicación y Automática. Área de Ingeniería de Sistemas y Automática OBJETIVOS: Utilizar distintas máscaras empleadas para
Detección de bordes en una imagen. Departamento de Ingeniería electrónica, Telecomunicación y Automática. Área de Ingeniería de Sistemas y Automática OBJETIVOS: Utilizar distintas máscaras empleadas para
Capítulo 3. Procesamiento de imágenes
 Capítulo 3. Procesamiento de imágenes 3.1 Procesamiento de imágenes En el procesamiento digital de imágenes se distinguen dos niveles principales de manera general: [DIP-IAU, 2000] - Procesamiento de imágenes
Capítulo 3. Procesamiento de imágenes 3.1 Procesamiento de imágenes En el procesamiento digital de imágenes se distinguen dos niveles principales de manera general: [DIP-IAU, 2000] - Procesamiento de imágenes
Fundamentos de Visión por Computador
 Fundamentos de Visión por Computador Sistemas Informáticos Avanzados Índice Filtrado en el espacio Filtros lineales Tipos de ruido Filtro media Filtro mediana Filtros gausianos Filtrado en la frecuencia
Fundamentos de Visión por Computador Sistemas Informáticos Avanzados Índice Filtrado en el espacio Filtros lineales Tipos de ruido Filtro media Filtro mediana Filtros gausianos Filtrado en la frecuencia
Procesamiento de la Señal
 Filtrado IV: Filtrado en el Dominio del Espacio II 8 de abril de 2013 Filtrado en el dominio del Espacio II Repaso: Filtrado en el Dominio del Espacio: Convolución en Imágenes En 2D, la convolución en
Filtrado IV: Filtrado en el Dominio del Espacio II 8 de abril de 2013 Filtrado en el dominio del Espacio II Repaso: Filtrado en el Dominio del Espacio: Convolución en Imágenes En 2D, la convolución en
Extracción de Regiones
 Visión por Computadora Unidad V Extracción de Regiones Rogelio Ferreira Escutia Contenido ) Conceptos sobre Regiones 2) Binarización mediante detección de umbral 3) Etiquetado de componentes conexas 4)
Visión por Computadora Unidad V Extracción de Regiones Rogelio Ferreira Escutia Contenido ) Conceptos sobre Regiones 2) Binarización mediante detección de umbral 3) Etiquetado de componentes conexas 4)
 GRADIENTE La laplaciana es un buen filtro paso alto, pero no es una buena herramienta para resaltar o detectar los bordes. En muchos casos, los bordes o límites de las figuras o de las regiones aparecen
GRADIENTE La laplaciana es un buen filtro paso alto, pero no es una buena herramienta para resaltar o detectar los bordes. En muchos casos, los bordes o límites de las figuras o de las regiones aparecen
Ingeniería en Informática
 Ingeniería en Informática Procesamiento de Imágenes Digitales 1 a convocatoria oficial, curso 2008-2009 APELLIDOS: NOMBRE: En las preguntas tipo test cada respuesta correcta puntúa 0.5 puntos, mientras
Ingeniería en Informática Procesamiento de Imágenes Digitales 1 a convocatoria oficial, curso 2008-2009 APELLIDOS: NOMBRE: En las preguntas tipo test cada respuesta correcta puntúa 0.5 puntos, mientras
Contenido. Capítulo 1. Capítulo 2. Capítulo 3. Prólogo
 Contenido Prólogo XIII Capítulo 1 Acerca del procesamiento de imágenes 1 1.1 Introducción 2 1.2 Sistema de visión y procesamiento de imágenes 2 1.3 Procesamiento digital de imágenes 3 1.4 Relaciones básicas
Contenido Prólogo XIII Capítulo 1 Acerca del procesamiento de imágenes 1 1.1 Introducción 2 1.2 Sistema de visión y procesamiento de imágenes 2 1.3 Procesamiento digital de imágenes 3 1.4 Relaciones básicas
Procesamiento Avanzado de Imágenes Astronómicas. Filtrado Espacial
 Procesamiento Avanzado de Imágenes Astronómicas Filtrado Espacial Fundamentos filtrar implica retener o remover ciertas componentes de la imagen. el filtrado se hace utilizando kernels (máscaras, ventanas,
Procesamiento Avanzado de Imágenes Astronómicas Filtrado Espacial Fundamentos filtrar implica retener o remover ciertas componentes de la imagen. el filtrado se hace utilizando kernels (máscaras, ventanas,
Procesamiento Digital de Imágenes LCC-594
 Procesamiento Digital de Imágenes LCC-594 Benemérita Universidad Autónoma de Puebla Facultad de Ciencias de la Computación Daniel Alejandro Valdés Amaro, Ph.D 4. Operaciones regionales Objetivo: Conocer
Procesamiento Digital de Imágenes LCC-594 Benemérita Universidad Autónoma de Puebla Facultad de Ciencias de la Computación Daniel Alejandro Valdés Amaro, Ph.D 4. Operaciones regionales Objetivo: Conocer
Fundamentos de Visión por Computador
 Fundamentos de Visión por Computador Sistemas Informáticos Avanzados Índice Introducción Conectividad Operaciones matemáticas básicas OR AND NOT XOR Operadores morfológicos Dilatación Erosión Cierre Apertura
Fundamentos de Visión por Computador Sistemas Informáticos Avanzados Índice Introducción Conectividad Operaciones matemáticas básicas OR AND NOT XOR Operadores morfológicos Dilatación Erosión Cierre Apertura
Análisis de imágenes digitales
 Análisis de imágenes digitales FILTRADO DE LA IMAGEN Filtros espaciales suavizantes INTRODUCCIÓN El uso de máscaras espaciales para el procesamiento de imágenes se denomina filtrado espacial y a las propias
Análisis de imágenes digitales FILTRADO DE LA IMAGEN Filtros espaciales suavizantes INTRODUCCIÓN El uso de máscaras espaciales para el procesamiento de imágenes se denomina filtrado espacial y a las propias
Índice. Qué es la laplaciana? Filtros Laplaciana. Qué es la laplaciana? Sensibles al ruido
 Índice Qué es la laplaciana? Introducción (5 min.) Qué es un borde? Pasos en la detección de bordes basados en gradiente ( h.) Qué es gradiente? Detectores de bordes basados en laplaciana ( h.) Qué es
Índice Qué es la laplaciana? Introducción (5 min.) Qué es un borde? Pasos en la detección de bordes basados en gradiente ( h.) Qué es gradiente? Detectores de bordes basados en laplaciana ( h.) Qué es
Tema 6: Contornos. 1. Introducción. 2. Filtrado de imágenes: Convolución. 3. Detección de Contornos. 4. Segmentación de Contornos
 . Introducción Tema 6: Contornos 2. Filtrado de imágenes: Convolución 3. Detección de Contornos Detectores de Gradiente: Sobel, Canny,... Cruces por Cero: Marr-Hildreth 4. Segmentación de Contornos Seguimiento
. Introducción Tema 6: Contornos 2. Filtrado de imágenes: Convolución 3. Detección de Contornos Detectores de Gradiente: Sobel, Canny,... Cruces por Cero: Marr-Hildreth 4. Segmentación de Contornos Seguimiento
Índice 1. Introducción Imagen digital. Formación imagen Histograma de una imagen digital 2. Transformaciones puntuales. Introducción.
 Índice 1. Imagen digital. Formación imagen Histograma de una imagen digital 2. Transformaciones puntuales Procesamiento de imágenes digitales Transformaciones basadas en el histograma Ecualización del
Índice 1. Imagen digital. Formación imagen Histograma de una imagen digital 2. Transformaciones puntuales Procesamiento de imágenes digitales Transformaciones basadas en el histograma Ecualización del
Orden de las clases...
 Procesamiento Digital de Imágenes Pablo Roncagliolo B. Nº 18 Orden de las clases... CAPTURA, DIGITALIZACION Y ADQUISICION DE IMAGENES TRATAMIENTO ESPACIAL DE IMAGENES TRATAMIENTO EN FRECUENCIA DE IMAGENES
Procesamiento Digital de Imágenes Pablo Roncagliolo B. Nº 18 Orden de las clases... CAPTURA, DIGITALIZACION Y ADQUISICION DE IMAGENES TRATAMIENTO ESPACIAL DE IMAGENES TRATAMIENTO EN FRECUENCIA DE IMAGENES
Análisis Bioseñales I
 Análisis Bioseñales I Prepaso Práctico 4 Mauricio Farías Gerardo Fasce Rodrigo Ortiz Gustavo Zomosa IMAGEN Colección de componentes de frecuencia Formación de imagen : Pixel, valor : luminosidad del punto
Análisis Bioseñales I Prepaso Práctico 4 Mauricio Farías Gerardo Fasce Rodrigo Ortiz Gustavo Zomosa IMAGEN Colección de componentes de frecuencia Formación de imagen : Pixel, valor : luminosidad del punto
Filtros digitales dominio del espacio dominio de la frecuencia
 Tema 3: Filtros 1 Filtros digitales Los filtros digitales constituyen uno de los principales modos de operar en el procesamiento de imágenes digitales. Pueden usarse para distintos fines, pero en todos
Tema 3: Filtros 1 Filtros digitales Los filtros digitales constituyen uno de los principales modos de operar en el procesamiento de imágenes digitales. Pueden usarse para distintos fines, pero en todos
DETECCION DE ESQUINAS. ALGORITMO HARRIS SISTEMAS DE VISIÓN EN MANUFACTURA. ANDREAS OBED LLANES CORNEJO
 DETECCION DE ESQUINAS. ALGORITMO HARRIS SISTEMAS DE VISIÓN EN MANUFACTURA. ANDREAS OBED LLANES CORNEJO GENERALIDADES Tipos de esquinas presentes en la imagen: Geométricas, Texturadas, Proyección de un
DETECCION DE ESQUINAS. ALGORITMO HARRIS SISTEMAS DE VISIÓN EN MANUFACTURA. ANDREAS OBED LLANES CORNEJO GENERALIDADES Tipos de esquinas presentes en la imagen: Geométricas, Texturadas, Proyección de un
Procesamiento Digital de Imágenes. Pablo Roncagliolo B. Nº 18
 Procesamiento Digital de Imágenes Pablo Roncagliolo B. Nº 18 Orden de las clases... CAPTURA, DIGITALIZACION Y ADQUISICION DE IMAGENES TRATAMIENTO ESPACIAL DE IMAGENES TRATAMIENTO EN FRECUENCIA DE IMAGENES
Procesamiento Digital de Imágenes Pablo Roncagliolo B. Nº 18 Orden de las clases... CAPTURA, DIGITALIZACION Y ADQUISICION DE IMAGENES TRATAMIENTO ESPACIAL DE IMAGENES TRATAMIENTO EN FRECUENCIA DE IMAGENES
Tema 1.- Introducción a la Visión Artificial
 Tema 1.- Introducción a la Visión Artificial Visión Artificial Avanzada Prof. Dr. Nicolás Luis Fernández García Departamento de Informática y Análisis Numérico Escuela Politécnica Superior Universidad
Tema 1.- Introducción a la Visión Artificial Visión Artificial Avanzada Prof. Dr. Nicolás Luis Fernández García Departamento de Informática y Análisis Numérico Escuela Politécnica Superior Universidad
Tema 2: PROCESAMIENTO EN EL DOMINIO ESPACIAL (Parte 1)
") Tema 2: PROCESAMIENTO EN EL DOMINIO ESPACIAL (Parte 1) 1 I N G E N I E R Í A I N F O R M Á T I C A D P T O. M A T E M Á T I C A A P L I C A D A I 2 ÍNDICE: Nociones básicas Concepto de ruido Dominio espacial:
Tema 2: PROCESAMIENTO EN EL DOMINIO ESPACIAL (Parte 1) 1 I N G E N I E R Í A I N F O R M Á T I C A D P T O. M A T E M Á T I C A A P L I C A D A I 2 ÍNDICE: Nociones básicas Concepto de ruido Dominio espacial:
Tema 3: Filtros SEGUNDA PARTE
 Tema 3: Filtros SEGUNDA PARTE FILTROS En el dominio del espacio: Filtros de suavizado. Filtros de realce. En el dominio de la recuencia: Filtros de suavizado. Filtros de realce. Filtros espaciales de realce
Tema 3: Filtros SEGUNDA PARTE FILTROS En el dominio del espacio: Filtros de suavizado. Filtros de realce. En el dominio de la recuencia: Filtros de suavizado. Filtros de realce. Filtros espaciales de realce
Tema 1.- Introducción a la Visión Artificial
 Tema 1.- Introducción a la Visión Artificial Visión Artificial Avanzada Prof. Dr. Nicolás Luis Fernández García Departamento de Informática y Análisis Numérico Universidad de Córdoba Universidad de Córdoba
Tema 1.- Introducción a la Visión Artificial Visión Artificial Avanzada Prof. Dr. Nicolás Luis Fernández García Departamento de Informática y Análisis Numérico Universidad de Córdoba Universidad de Córdoba
Procesamiento de Imágenes. Curso 2011 Clase 3 Eliminación del ruido mediante filtrado espacial
 Procesamiento de Imágenes Curso 2 Clase 3 Eliminación del ruido mediante filtrado espacial Eliminación del ruido Entendemos por ruido en imágenes digitales cualquier valor de un píxel de una imagen que
Procesamiento de Imágenes Curso 2 Clase 3 Eliminación del ruido mediante filtrado espacial Eliminación del ruido Entendemos por ruido en imágenes digitales cualquier valor de un píxel de una imagen que
Percepción visual aplicada a la robótica
 Percepción visual aplicada a la robótica Mario I. Chacón Murguía Rafael Sandoval Rodríguez Javier Vega Pineda Selecciona el libro para empezar Capítulo 1 Conceptos básicos de procesamiento de imágenes
Percepción visual aplicada a la robótica Mario I. Chacón Murguía Rafael Sandoval Rodríguez Javier Vega Pineda Selecciona el libro para empezar Capítulo 1 Conceptos básicos de procesamiento de imágenes
Deteccio n de monedas con el me todo de la transformada de Hough
 Deteccio n de monedas con el me todo de la transformada de Hough G R U P O 10 C A R L O S H E R C E G U I L L E R M O G U T I É R R E Z Procesamiento de Imágenes Digitales Ingeniería en Informática. Enero
Deteccio n de monedas con el me todo de la transformada de Hough G R U P O 10 C A R L O S H E R C E G U I L L E R M O G U T I É R R E Z Procesamiento de Imágenes Digitales Ingeniería en Informática. Enero
CAPÍTULO 2. Desde el punto de vista más simple, hoy una imagen digital consiste de lo que se puede ver
 CAPÍTULO 2 PROCESAMIENTO DE IMÁGENES 2.1 Imágenes Digitales Desde el punto de vista más simple, hoy una imagen digital consiste de lo que se puede ver como una matriz de miles o millones de píxeles cada
CAPÍTULO 2 PROCESAMIENTO DE IMÁGENES 2.1 Imágenes Digitales Desde el punto de vista más simple, hoy una imagen digital consiste de lo que se puede ver como una matriz de miles o millones de píxeles cada
Procesamiento de imágenes
 Procesamiento de imágenes Técnicas de realce de imágenes Técnicas de realce de imágenes Las imágenes digitalizadas no presentan siempre una calidad adecuada para su utilización, ello puede ser debido a
Procesamiento de imágenes Técnicas de realce de imágenes Técnicas de realce de imágenes Las imágenes digitalizadas no presentan siempre una calidad adecuada para su utilización, ello puede ser debido a
Detección de bordes: metodos lineales de cálculo de gradientesk, etc. Detección de bordes. Métodos basados en operadores lineales de gradiente
 Detección de bordes Métodos basados en operadores lineales de gradiente 1 Bordes Variaciones fuertes de la intensidad que corresponden a las fronteras de los objetos visualizados Métodos basados en el
Detección de bordes Métodos basados en operadores lineales de gradiente 1 Bordes Variaciones fuertes de la intensidad que corresponden a las fronteras de los objetos visualizados Métodos basados en el
Capítulo 2. Técnicas de Procesamiento de Imágenes
 Capítulo 2. Técnicas de Procesamiento de Imágenes 2.1 Binarización La binarización es una de las técnicas más antiguas de procesamiento de imágenes ya que en el pasado, el primer analizador de imágenes
Capítulo 2. Técnicas de Procesamiento de Imágenes 2.1 Binarización La binarización es una de las técnicas más antiguas de procesamiento de imágenes ya que en el pasado, el primer analizador de imágenes
Presenta: Norma Atriano Pérez
 Presenta: Norma Atriano Pérez Introducción Es posible que desee cambiar la resolución de un la imagen, reducir el tamaño de la imagen, ampliarla o en otro caso no se sabe que resolución poner en la imagen
Presenta: Norma Atriano Pérez Introducción Es posible que desee cambiar la resolución de un la imagen, reducir el tamaño de la imagen, ampliarla o en otro caso no se sabe que resolución poner en la imagen
Prueba II. Procesamiento Digital de Imágenes
 Prueba II Procesamiento Digital de Imágenes Nombre: Firma: Fecha: /nov/2005.- Escriba el pseudo código para implementar la operación morfológica dilatación, con el siguiente elemento estructurante : función
Prueba II Procesamiento Digital de Imágenes Nombre: Firma: Fecha: /nov/2005.- Escriba el pseudo código para implementar la operación morfológica dilatación, con el siguiente elemento estructurante : función
Lección 1: Umbralización. 2. Umbralización utilizando el histograma
 1. Introducción Lección 1: Umbralización 2. Umbralización utilizando el histograma P-tile Modales Iterativos Adaptativos Variables 3. Histograma + Imagen Doble Weszka 1 1. Introducción: imágenes binarias
1. Introducción Lección 1: Umbralización 2. Umbralización utilizando el histograma P-tile Modales Iterativos Adaptativos Variables 3. Histograma + Imagen Doble Weszka 1 1. Introducción: imágenes binarias
El Cálculo en el Procesamiento de Imágenes
 Humberto Madrid Josefina M. Cribeiro José Luis Fraga Universidad Autónoma de Coahuila México Resumen. La detección de bordes tiene un papel fundamental en el Procesamiento de Imágenes y los algoritmos
Humberto Madrid Josefina M. Cribeiro José Luis Fraga Universidad Autónoma de Coahuila México Resumen. La detección de bordes tiene un papel fundamental en el Procesamiento de Imágenes y los algoritmos
Dentro de este tipo de segmentación se encuentran los métodos de combinación y división, y crecimiento de regiones.
 4. Estado del arte Hoy en día, el análisis y el tratamiento de las imágenes lo encontramos la mayoría de las veces integrado con aplicaciones de visualización. La segmentación de imágenes digitales en
4. Estado del arte Hoy en día, el análisis y el tratamiento de las imágenes lo encontramos la mayoría de las veces integrado con aplicaciones de visualización. La segmentación de imágenes digitales en
Contenido Capítulo 1 Introducción Capítulo 2 Conceptos Básicos Capítulo 3 Procesamiento de Imágenes en el Dominio Espacial
 Contenido Capítulo 1 Introducción 1.Introducción 1 1.1 Sistema Visual Humano 1 1.2 Modelo de Visión por Computadora 3 1.3 Procesamiento Digital de Imágenes 3 1.4 Definición de Imagen Digital 4 Problemas
Contenido Capítulo 1 Introducción 1.Introducción 1 1.1 Sistema Visual Humano 1 1.2 Modelo de Visión por Computadora 3 1.3 Procesamiento Digital de Imágenes 3 1.4 Definición de Imagen Digital 4 Problemas
UNIVERSIDAD POLITÉCNICA DE MADRID
 UNIVERSIDAD POLITÉCNICA DE MADRID DEPARTAMENTO DE ELECTRÓNICA, AUTOMÁTICA E INFORMÁTICA INDUSTRIAL Prácticas de Robótica y Visión Artificial Práctica 3 Prácticas de procesado de las imágenes 3.2 Técnicas
UNIVERSIDAD POLITÉCNICA DE MADRID DEPARTAMENTO DE ELECTRÓNICA, AUTOMÁTICA E INFORMÁTICA INDUSTRIAL Prácticas de Robótica y Visión Artificial Práctica 3 Prácticas de procesado de las imágenes 3.2 Técnicas
Capítulo 4: Método de segmentación 3D basado en Contornos Activos
 Capítulo 4: Método de segmentación 3D basado en Contornos Activos 4.1. Introducción En este capítulo se describe el método utilizado en la realización del Proyecto Fin de Máster. Como se ha comentado en
Capítulo 4: Método de segmentación 3D basado en Contornos Activos 4.1. Introducción En este capítulo se describe el método utilizado en la realización del Proyecto Fin de Máster. Como se ha comentado en
Procesamiento de Imágenes Digitales Asesinos de estudiantes normalistas. Paren de asesinar a futuros formadores.
 Procesamiento de Imágenes Digitales Asesinos de estudiantes normalistas. Paren de asesinar a futuros formadores. Dr. Ivo H. Pineda Torres Facultad de Ciencias de la Computación Benemérita Universidad Autónoma
Procesamiento de Imágenes Digitales Asesinos de estudiantes normalistas. Paren de asesinar a futuros formadores. Dr. Ivo H. Pineda Torres Facultad de Ciencias de la Computación Benemérita Universidad Autónoma
Korell, Guillermo Pohl, Nancy. Universidad Nacional del Litoral. Facultad de Ingeniería y Ciencias Hídricas
 Unión de imágenes mediante correlación Korell, Guillermo Pohl, Nancy Universidad Nacional del Litoral Facultad de Ingeniería y Ciencias Hídricas Captura y Procesamiento Digital de Señales e Imágenes Resumen:
Unión de imágenes mediante correlación Korell, Guillermo Pohl, Nancy Universidad Nacional del Litoral Facultad de Ingeniería y Ciencias Hídricas Captura y Procesamiento Digital de Señales e Imágenes Resumen:
PROCESAMIENTO DIGITAL DE IMÁGENES
 PROCESAMIENTO DIGITAL DE IMÁGENES Nombre de la materia: Procesamiento Digital de Imágenes Profesor: Dr. Wilfrido Gómez Flores Número de horas: 60 horas (4 horas semanales). Sitio web: http://www.tamps.cinvestav.mx/~wgomez/teaching.html
PROCESAMIENTO DIGITAL DE IMÁGENES Nombre de la materia: Procesamiento Digital de Imágenes Profesor: Dr. Wilfrido Gómez Flores Número de horas: 60 horas (4 horas semanales). Sitio web: http://www.tamps.cinvestav.mx/~wgomez/teaching.html
Análisis de imágenes biomédicas
 Análisis de imágenes biomédicas Formación de la imagen a partir de una fuente externa β Objeto irradiado γ Dominio del objeto Sistema de formación de la imagen h x y Imagen Sección seleccionada z Dominio
Análisis de imágenes biomédicas Formación de la imagen a partir de una fuente externa β Objeto irradiado γ Dominio del objeto Sistema de formación de la imagen h x y Imagen Sección seleccionada z Dominio
Curso de Procesamiento Digital de Imágenes
 Curso de Procesamiento Digital de Imágenes Impartido por: Elena Martínez Departamento de Ciencias de la Computación IIMAS, UNAM, cubículo 408 http://turing.iimas.unam.mx/~elena/teaching/pdi-mast.html elena.martinez@iimas.unam.mx
Curso de Procesamiento Digital de Imágenes Impartido por: Elena Martínez Departamento de Ciencias de la Computación IIMAS, UNAM, cubículo 408 http://turing.iimas.unam.mx/~elena/teaching/pdi-mast.html elena.martinez@iimas.unam.mx
Segmentación. 5.1 Introducción. 5.2 Detección de Discontinuidades
 Capítulo 5 Segmentación 5.1 Introducción Las técnicas empleadas para extraer información de una imagen se agrupan en lo que se denomina Análisis de Imágenes. El primer paso dentro del Análisis de imágenes
Capítulo 5 Segmentación 5.1 Introducción Las técnicas empleadas para extraer información de una imagen se agrupan en lo que se denomina Análisis de Imágenes. El primer paso dentro del Análisis de imágenes
Conceptos Básicos para el Procesamiento Digital de Imágenes
 ELO 313 Procesamiento Digital de Señales con Aplicaciones Conceptos Básicos para el Procesamiento Digital de Imágenes Matías Zañartu, Ph.D. Departamento de Electrónica Universidad Técnica Federico Santa
ELO 313 Procesamiento Digital de Señales con Aplicaciones Conceptos Básicos para el Procesamiento Digital de Imágenes Matías Zañartu, Ph.D. Departamento de Electrónica Universidad Técnica Federico Santa
TABLA DE CONTENIDOS. Dedicatoria. Agradecimientos. Tabla de Contenidos. Índice de Figuras. Índice de Tablas. Resumen
 TABLA DE CONTENIDOS página Dedicatoria Agradecimientos Tabla de Contenidos Índice de Figuras Índice de Tablas Resumen I II IV VII X XI 1. Introducción 13 1.1. Descripción del contexto.........................
TABLA DE CONTENIDOS página Dedicatoria Agradecimientos Tabla de Contenidos Índice de Figuras Índice de Tablas Resumen I II IV VII X XI 1. Introducción 13 1.1. Descripción del contexto.........................
Realzado de Imagen. 11 de junio de El histograma de una imagen digital con niveles de gris en la amplitud de [0, L 1], es función discreta
![Realzado de Imagen. 11 de junio de El histograma de una imagen digital con niveles de gris en la amplitud de [0, L 1], es función discreta](/thumbs/69/61631941.jpg "Realzado de Imagen. 11 de junio de El histograma de una imagen digital con niveles de gris en la amplitud de [0, L 1], es función discreta") Realzado de Imagen 11 de junio de 2001 Una operación clásica en el procesado de imagen es realzar una imagen de entrada de alguna manera para que la imagen de salida sea más fácil de interpretarla. La
Realzado de Imagen 11 de junio de 2001 Una operación clásica en el procesado de imagen es realzar una imagen de entrada de alguna manera para que la imagen de salida sea más fácil de interpretarla. La
Explotación de imágenes aéreas y espaciales con fines cartográficos. Realce radio-métrico y espacial. Realce de Imagen: Índice (1/3)
") Explotación de imágenes aéreas y espaciales con fines cartográficos Realce radio-métrico y espacial. Realce de Imagen: Índice (1/3) Definiciones. Cuantificación. Muestreo. Histograma. Brillo y contraste.
Explotación de imágenes aéreas y espaciales con fines cartográficos Realce radio-métrico y espacial. Realce de Imagen: Índice (1/3) Definiciones. Cuantificación. Muestreo. Histograma. Brillo y contraste.
INDICE Prefacio 1. Introducción 2. Fundamentos de la imagen digital
 INDICE Prefacio XVII 1. Introducción 1.1. Fundamentos 1 1.2. Representación digital de imágenes 6 1.3. Etapas fundamentales del procesamiento de imágenes 8 1.4. Elementos de los sistemas de procesamiento
INDICE Prefacio XVII 1. Introducción 1.1. Fundamentos 1 1.2. Representación digital de imágenes 6 1.3. Etapas fundamentales del procesamiento de imágenes 8 1.4. Elementos de los sistemas de procesamiento
Procesamiento de Imágenes. Prof. Alexandra La Cruz, PhD
 Procesamiento de Imágenes Prof. Alexandra La Cruz, PhD alacruz@ldc.usb.ve Contenido Conceptos básicos Modelo de una imagen Procesamiento digital de imágenes Operaciónes básicas Convolución Filtros Segmentación
Procesamiento de Imágenes Prof. Alexandra La Cruz, PhD alacruz@ldc.usb.ve Contenido Conceptos básicos Modelo de una imagen Procesamiento digital de imágenes Operaciónes básicas Convolución Filtros Segmentación
CAPÍTULO 2. MARCO TEÓRICO. El reconocimiento de imágenes es en general un proceso complejo que requiere una serie
 CAPÍTULO 2. MARCO TEÓRICO El reconocimiento de imágenes es en general un proceso complejo que requiere una serie de pasos que sucesivamente transforman los datos icónicos a información que la computadora
CAPÍTULO 2. MARCO TEÓRICO El reconocimiento de imágenes es en general un proceso complejo que requiere una serie de pasos que sucesivamente transforman los datos icónicos a información que la computadora
INSTITUTO POLITÉCNICO NACIONAL
 INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA DETECCIÓN DE BORDES MEDIANTE INTELIGENCIA ARTIFICIAL MODALIDAD: CURRICULAR QUE PARA OBTENER EL TÍTULO: INGENIERO EN COMUNICACIONES
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERÍA MECÁNICA Y ELÉCTRICA DETECCIÓN DE BORDES MEDIANTE INTELIGENCIA ARTIFICIAL MODALIDAD: CURRICULAR QUE PARA OBTENER EL TÍTULO: INGENIERO EN COMUNICACIONES
Filtros en el dominio espacial
 Filtros en el dominio espacial Lección 5.2 Dr. Pablo Alvarado Moya CE521 Procesamiento y Análisis de Imágenes Digitales Área de Ingeniería en Computadores Tecnológico de Costa Rica I Semestre, 217 P. Alvarado
Filtros en el dominio espacial Lección 5.2 Dr. Pablo Alvarado Moya CE521 Procesamiento y Análisis de Imágenes Digitales Área de Ingeniería en Computadores Tecnológico de Costa Rica I Semestre, 217 P. Alvarado
Procesamiento Digital de Imágenes
 Procesamiento Digital de Imágenes Pablo Roncagliolo B. Nº 14 Procesamiento Espacial en Color De manera similar al procesamiento espacial de imágenes en escala de gris, las imágenes RGB pueden ser procesadas
Procesamiento Digital de Imágenes Pablo Roncagliolo B. Nº 14 Procesamiento Espacial en Color De manera similar al procesamiento espacial de imágenes en escala de gris, las imágenes RGB pueden ser procesadas
Tratamiento de imágenes Relaciones básicas entre píxeles
 Tratamiento de imágenes Relaciones básicas entre píxeles Héctor Alejandro Montes hamontesv@uaemex.mx http://scfi.uaemex.mx/hamontes Advertencia No use estas diapositivas como referencia única de estudio
Tratamiento de imágenes Relaciones básicas entre píxeles Héctor Alejandro Montes hamontesv@uaemex.mx http://scfi.uaemex.mx/hamontes Advertencia No use estas diapositivas como referencia única de estudio
Procesamiento Digital de Imágenes. Pablo Roncagliolo B. Nº 14
 Procesamiento Digital de Imágenes Pablo Roncagliolo B. Nº 14 Procesamiento Espacial en Color De manera similar al procesamiento espacial de imágenes en escala de gris, las imágenes RGB pueden ser procesadas
Procesamiento Digital de Imágenes Pablo Roncagliolo B. Nº 14 Procesamiento Espacial en Color De manera similar al procesamiento espacial de imágenes en escala de gris, las imágenes RGB pueden ser procesadas
Apéndice A: Funciones del programa LightPAP
 Apéndice A: Funciones del programa LightPAP A continuación se van a explicar las funciones principales que se han desarrollado para esta aplicación. 1 calcula_prop.m function [nc,cv,posicion,tinta,saturacion,luminancia]
Apéndice A: Funciones del programa LightPAP A continuación se van a explicar las funciones principales que se han desarrollado para esta aplicación. 1 calcula_prop.m function [nc,cv,posicion,tinta,saturacion,luminancia]
Mejora de la Imagen Image Enhancement. Ref: Capítulo 3 Digital Image Processing Gonzalez, Woods
 Mejora de la Imagen Image Enhancement Ref: Capítulo 3 Digital Image Processing Gonzalez, Woods Para que? Mejorar la visualización Facilitar el procesamiento posterior Adecuar la imagen para una aplicación
Mejora de la Imagen Image Enhancement Ref: Capítulo 3 Digital Image Processing Gonzalez, Woods Para que? Mejorar la visualización Facilitar el procesamiento posterior Adecuar la imagen para una aplicación
Revisión del algoritmo de Corte Normalizado
 Capítulo 2 Revisión del algoritmo de Corte Normalizado El algoritmo Ncut realiza la segmentación planteando un problema de división de grafos, en el cual se pretende maximizar tanto la disimilitud entre
Capítulo 2 Revisión del algoritmo de Corte Normalizado El algoritmo Ncut realiza la segmentación planteando un problema de división de grafos, en el cual se pretende maximizar tanto la disimilitud entre
MODELO FUNCIONAL DEL SISTEMA
 APENDICE A: MODELO FUNCIONAL DEL SISTEMA 102 APENDICE A MODELO FUNCIONAL DEL SISTEMA A.1. Descripción del proyecto El Sistema Reconocedor de Partituras Musicales (S.R.P.M.) es un sistema que analiza partituras
APENDICE A: MODELO FUNCIONAL DEL SISTEMA 102 APENDICE A MODELO FUNCIONAL DEL SISTEMA A.1. Descripción del proyecto El Sistema Reconocedor de Partituras Musicales (S.R.P.M.) es un sistema que analiza partituras
Tratamiento de imágenes Filtrado Espacial - Convolución
 Tratamiento de imágenes Filtrado Espacial - Convolución Héctor Alejandro Montes h.a.montes@fi.uaemex.mx http://fi.uaemex.mx/h.a.montes Advertencia No use estas diapositivas como referencia única de estudio
Tratamiento de imágenes Filtrado Espacial - Convolución Héctor Alejandro Montes h.a.montes@fi.uaemex.mx http://fi.uaemex.mx/h.a.montes Advertencia No use estas diapositivas como referencia única de estudio
negativa en la transicio n asociada con el lado claro del borde, y cero a lo largo de la rampa y en areas de nivel constante de gris.
 Deteccio n de Bordes por Derivadas Primera y Segunda Autores: Vero nica Facello Mo nica Larese Milton Spada Catedra de Captura y Procesamiento Digital de Senales e Imagenes Trabajo Final Facultad de Ingenierıa
Deteccio n de Bordes por Derivadas Primera y Segunda Autores: Vero nica Facello Mo nica Larese Milton Spada Catedra de Captura y Procesamiento Digital de Senales e Imagenes Trabajo Final Facultad de Ingenierıa
Procesamiento Digital de Imágenes. Pablo Roncagliolo B. Nº 5b
 Procesamiento Digital de Imágenes Pablo Roncagliolo B. Nº 5b Orden de las clases... CAPTURA, DIGITALIZACION Y ADQUISICION DE IMAGENES TRATAMIENTO ESPACIAL DE IMAGENES TRATAMIENTO EN FRECUENCIA DE IMAGENES
Procesamiento Digital de Imágenes Pablo Roncagliolo B. Nº 5b Orden de las clases... CAPTURA, DIGITALIZACION Y ADQUISICION DE IMAGENES TRATAMIENTO ESPACIAL DE IMAGENES TRATAMIENTO EN FRECUENCIA DE IMAGENES
REDUCCIÓN DEL RUIDO EN UNA IMAGEN DIGITAL
 Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández REDUCCIÓN DEL RUIDO EN UNA IMAGEN DIGITAL Tabla de Contenidos Definición Filtros No Lineales Filtros Temporales Definición 3 G = Ruido:
Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández REDUCCIÓN DEL RUIDO EN UNA IMAGEN DIGITAL Tabla de Contenidos Definición Filtros No Lineales Filtros Temporales Definición 3 G = Ruido:
Visión de Alto Nivel
 Visión de Alto Nivel Dr. Luis Enrique Sucar INAOE esucar@inaoep.mx ccc.inaoep.mx/~esucar Sesión 2 Bajo Nivel 1 Visión de Bajo Nivel 2 Extracción de Características orillas color textura 3 Orillas Las variaciones
Visión de Alto Nivel Dr. Luis Enrique Sucar INAOE esucar@inaoep.mx ccc.inaoep.mx/~esucar Sesión 2 Bajo Nivel 1 Visión de Bajo Nivel 2 Extracción de Características orillas color textura 3 Orillas Las variaciones
Detección de Esquinas y Vértices
 Detección de Esquinas Vértices Departamento de Automática, Ingeniería Electrónica e Inormática Industrial Universidad Politécnica de Madrid Detección de Esquinas Vértices José María Sebastián http://www.disam.upm.es/vision
Detección de Esquinas Vértices Departamento de Automática, Ingeniería Electrónica e Inormática Industrial Universidad Politécnica de Madrid Detección de Esquinas Vértices José María Sebastián http://www.disam.upm.es/vision
Técnicas de Segmentación
 Técnicas de Segmentación M.C. Sayde Alcántara Santiago Licenciatura en Informática (951) 50 1 72 08 Ext. 1024 salcantara@jacinto.novauniversitas.edu.mx Resumen El desarrollo de las tecnologías de adquisición
Técnicas de Segmentación M.C. Sayde Alcántara Santiago Licenciatura en Informática (951) 50 1 72 08 Ext. 1024 salcantara@jacinto.novauniversitas.edu.mx Resumen El desarrollo de las tecnologías de adquisición
Procesamiento de Imágenes
 3. Procesamiento de Imágenes 3.1 Transformada discreta de Fourier en 2D Una señal periódica con períodos N 1 y N 2 en sus coordenadas x 1 y x 2, respectivamente, tiene una trasformada de Fourier definida
3. Procesamiento de Imágenes 3.1 Transformada discreta de Fourier en 2D Una señal periódica con períodos N 1 y N 2 en sus coordenadas x 1 y x 2, respectivamente, tiene una trasformada de Fourier definida
TAREA N 1 DETECTOR DE LETRAS L MEDIANTE CAMPO RECEPTIVO
 Universidad de Chile Facultad de Ciencias Físicas y Matemáticas Departamento de Ingeniería Eléctrica EL7007 Introducción al Procesamiento Digital de Imágenes TAREA N 1 DETECTOR DE LETRAS L MEDIANTE CAMPO
Universidad de Chile Facultad de Ciencias Físicas y Matemáticas Departamento de Ingeniería Eléctrica EL7007 Introducción al Procesamiento Digital de Imágenes TAREA N 1 DETECTOR DE LETRAS L MEDIANTE CAMPO
Sistemas de Percepción Visión por Computador
 5/9/7 Nota: Algunas de las imágenes que aparecen en esta presentación provienen del libro: Visión por Computador: fundamentos y métodos. Arturo de la Escalera Hueso. Prentice Hall. Sistemas de Percepción
5/9/7 Nota: Algunas de las imágenes que aparecen en esta presentación provienen del libro: Visión por Computador: fundamentos y métodos. Arturo de la Escalera Hueso. Prentice Hall. Sistemas de Percepción
Procesamiento y análisis de imágenes digitales I
 Procesamiento y análisis de imágenes digitales I Alejandra García, TM Centro de Estudios Moleculares de la Célula, FONDAP, Facultad de Medicina, Universidad de Chile Procesamiento de Imágenes Digitales
Procesamiento y análisis de imágenes digitales I Alejandra García, TM Centro de Estudios Moleculares de la Célula, FONDAP, Facultad de Medicina, Universidad de Chile Procesamiento de Imágenes Digitales
[20380] Visió per Computador Prueba 1 (2017) [A] Teoría (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)
![[20380] Visió per Computador Prueba 1 (2017) [A] Teoría (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)](/thumbs/89/97860031.jpg "[20380] Visió per Computador Prueba 1 (2017) [A] Teoría (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada)") 102784 [20380] Visió per Computador Prueba 1 (2017) [A] Teoría (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada) 1. Qué secuencia está ordenada de mayor a menor frecuencia: a) Rayos
102784 [20380] Visió per Computador Prueba 1 (2017) [A] Teoría (10p) (una pregunta test fallada descuenta 1/4 de pregunta acertada) 1. Qué secuencia está ordenada de mayor a menor frecuencia: a) Rayos
Figura 1: Propiedades de textura: (a) Suavidad, (b) Rugosidad y (c) Regularidad
 Suavidad, (b) Rugosidad y (c) Regularidad") 3 TEXTURA 3.1 CONCEPTO DE LA TEXTURA La textura es una característica importante utilizada en segmentación, identificación de objetos o regiones de interés en una imagen y obtención de forma. El uso de
3 TEXTURA 3.1 CONCEPTO DE LA TEXTURA La textura es una característica importante utilizada en segmentación, identificación de objetos o regiones de interés en una imagen y obtención de forma. El uso de
Tema 4: MORFOLOGÍA (Parte II) I N G E N I E R Í A I N F O R M Á T I C A
 I N G E N I E R Í A I N F O R M Á T I C A") Tema 4: MORFOLOGÍA (Parte II) 1 I N G E N I E R Í A I N F O R M Á T I C A 2 Morfología Imágenes binarias Imágenes en escala de grises Operaciones morfológicas Aplicaciones Operaciones morfológicas Aplicaciones
Tema 4: MORFOLOGÍA (Parte II) 1 I N G E N I E R Í A I N F O R M Á T I C A 2 Morfología Imágenes binarias Imágenes en escala de grises Operaciones morfológicas Aplicaciones Operaciones morfológicas Aplicaciones
Sistemas de Percepción Visión por Computador
 Nota: Algunas de las imágenes que aparecen en esta presentación provienen del libro: Visión por Computador: fundamentos y métodos. Arturo de la Escalera Hueso. Prentice Hall. Sistemas de Percepción Visión
Nota: Algunas de las imágenes que aparecen en esta presentación provienen del libro: Visión por Computador: fundamentos y métodos. Arturo de la Escalera Hueso. Prentice Hall. Sistemas de Percepción Visión
Tema 4. Reducción del ruido
 1 Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández GRUPO DE TECNOLOGÍA INDUSTRIAL Tabla de Contenidos 2 Definición Filtros Lineales Filtros No Lineales Filtros Temporales Realce Espacial
1 Div. Ingeniería de Sistemas y Automática Universidad Miguel Hernández GRUPO DE TECNOLOGÍA INDUSTRIAL Tabla de Contenidos 2 Definición Filtros Lineales Filtros No Lineales Filtros Temporales Realce Espacial
Sistemas de Percepción Visión por Computador
 Nota: Algunas de las imágenes que aparecen en esta presentación provienen del libro: Visión por Computador: fundamentos y métodos. Arturo de la Escalera Hueso. Prentice Hall. Sistemas de Percepción Visión
Nota: Algunas de las imágenes que aparecen en esta presentación provienen del libro: Visión por Computador: fundamentos y métodos. Arturo de la Escalera Hueso. Prentice Hall. Sistemas de Percepción Visión
Temas Avanzados en Procesado de Señales Tratamiento Digital de Señales Visuales
 Temas Avanzados en Procesado de Señales Tratamiento Digital de Señales Visuales Tema 4: Operadores Locales operadores locales, ajustes geométricos, operadores morfológicos, filtrado por reconstrucción,
Temas Avanzados en Procesado de Señales Tratamiento Digital de Señales Visuales Tema 4: Operadores Locales operadores locales, ajustes geométricos, operadores morfológicos, filtrado por reconstrucción,
Trabajo Final Captura y Procesamiento Digital de Imágenes
 Trabajo Final Captura y Procesamiento Digital de Imágenes Reconocimiento Automático de Matriculas Dorsch, Juan Pablo Fort Villa, Alejandro Furlan, Lucas Objetivos Localizar la Ubicación de la Chapa Patente
Trabajo Final Captura y Procesamiento Digital de Imágenes Reconocimiento Automático de Matriculas Dorsch, Juan Pablo Fort Villa, Alejandro Furlan, Lucas Objetivos Localizar la Ubicación de la Chapa Patente
5. Software desarrollado
 5. Software desarrollado Como ya se ha señalado, en el desarrollo de este proyecto se ha creado una herramienta que ayuda al diagnóstico de cáncer de cérvix. Esta herramienta calcula una serie de parámetros
5. Software desarrollado Como ya se ha señalado, en el desarrollo de este proyecto se ha creado una herramienta que ayuda al diagnóstico de cáncer de cérvix. Esta herramienta calcula una serie de parámetros
Sistema de filtrado espacial de imágenes en sistemas embebidos
 Sistema de filtrado espacial de imágenes en sistemas embebidos Auramaria Londoño Cano, Juan David Chica Herrera, Luis Miguel Capacho Valbuena, Hernan Felipe Garcia Arias Ingeniería Electrónica, Universidad
Sistema de filtrado espacial de imágenes en sistemas embebidos Auramaria Londoño Cano, Juan David Chica Herrera, Luis Miguel Capacho Valbuena, Hernan Felipe Garcia Arias Ingeniería Electrónica, Universidad