Lenguaje ensamblador Semana 2 Trabajando con el lenguaje ensamblador
|
|
|
- Pablo Valverde Fernández
- hace 6 años
- Vistas:
Transcripción

1 2016 Lenguaje ensamblador Semana 2 Trabajando con el lenguaje ensamblador
2 Contenido Trabajando con el lenguaje ensamblador... 2 Introducción... 2 UNIDADES DE INFORMACIÓN... 3 BIT... 3 BYTE... 3 NIBBLE... 3 MARCAR LOS NÚMEROS... 3 DIAGRAMA A BLOQUES DEL MICROCONTROLADOR... 4 DIAGRAMA A BLOQUES DEL PIC16F628A... 5 UNIDAD CENTRAL DE PROCESAMIENTO (CENTRAL PROCESSOR UNIT - CPU)... 6 REGISTROS o MEMORIA RAM... 6 GPR (GENERAL PURPOSE REGISTERS O REGISTROS DE PROPÓSITO GENERAL)... 6 SFR (SPECIAL FUNCTION REGISTERS o REGISTROS DE FUNCIÓN ESPECIAL)... 6 El registro W... 6 El Contador de Programas (PC) PUERTOS DE ENTRADA/SALIDA (E/S) MEMORIA ROM (READ ONLY MEMORY) - MEMORIA DE SÓLO LECTURA OSCILADOR JUEGO DE INSTRUCCIONES CIRCUITOS LÓGICOS COMPUERTA Y (AND) COMPUERTA O (OR) COMPUERTA NO (NOT) COMPUERTA XOR (O EXCLUSIVA)
3 Trabajando con el lenguaje ensamblador Introducción Los principiantes en electrónica creen que un microcontrolador es igual a un microprocesador. Esto no es cierto. Difieren uno del otro en muchos sentidos. La primera y la más importante diferencia es su funcionalidad. Para utilizar al microprocesador en una aplicación real, se debe de conectar con componentes tales como memoria o componentes buses de transmisión de datos. Aunque el microprocesador se considera una máquina de computación poderosa, no está preparado para la comunicación con los dispositivos periféricos que se le conectan. Para que el microprocesador se comunique con algún periférico, se deben utilizar los circuitos especiales. Así era en el principio y esta práctica sigue vigente en la actualidad. Por otro lado, al microcontrolador se le diseña de tal manera que tenga todas las componentes integradas en el mismo chip. No necesita de otros componentes especializados para su aplicación, porque todos los circuitos necesarios, que de otra manera correspondan a los periféricos, ya se encuentran incorporados. Así se ahorra tiempo y espacio necesario para construir un dispositivo. 2
, el bit uno (el segundo bit a la derecha), el bit dos (el tercer bit a la derecha), etc.")
4 UNIDADES DE INFORMACIÓN BIT Un bit es la unidad básica de información, o dicho de otra forma, es un dígito binario. El significado de un bit depende de la posición que tiene en número binario. En los números binarios, sus dígitos se denominan el bit cero (el primer bit a la derecha), el bit uno (el segundo bit a la derecha), el bit dos (el tercer bit a la derecha), etc. Además, ya que el sistema binario utiliza solamente dos dígitos (0 y 1), el valor de un bit puede ser 0 o 1. BYTE Un byte consiste en 8 bits colocados uno junto al otro. Si un bit es un dígito, es lógico que los bytes representen los números. Todas las operaciones matemáticas se pueden realizar por medio de ellos, como por medio de los números decimales comunes. Similar a los dígitos de cualquier número, los dígitos de un byte no tienen el mismo significado. El bit del extremo izquierdo tiene la mayor ponderación, por eso es denominado el bit más significativo (MSB). El bit del extremo derecho tiene la menor ponderación, por eso es denominado el bit menos significativo (LSB). Puesto que los 8 dígitos de un byte se pueden combinar de 256 maneras diferentes, el mayor número decimal que se puede representar con un byte es 255 (una combinación representa un cero). NIBBLE Un nibble representa una mitad de byte. Dependiendo de la mitad del número en cuestión (izquierda o derecha), se les denomina nibbles altos o bajos, respectivamente. MARCAR LOS NÚMEROS El sistema de numeración hexadecimal, junto con los sistemas binario y decimal, se consideran los más importantes para nosotros. Para evitar equivocaciones, diferentes prefijos y sufijos se añaden directamente a los números. El prefijo $ o 0x así como el sufijo h marca los números en el sistema hexadecimal. Por ejemplo, el número hexadecimal 10AF se puede escribir así: $10AF, 0x10AF o 10AFh. De manera similar, los números binarios normalmente obtienen el sufijo % o 0B. Si un número no tiene ni sufijo ni prefijo se considera decimal. Desafortunadamente, esta forma de marcar los números no es estandarizada, por consiguiente depende de la aplicación concreta. 3

5 DIAGRAMA A BLOQUES DEL MICROCONTROLADOR 4
6 DIAGRAMA A BLOQUES DEL PIC16F628A 5
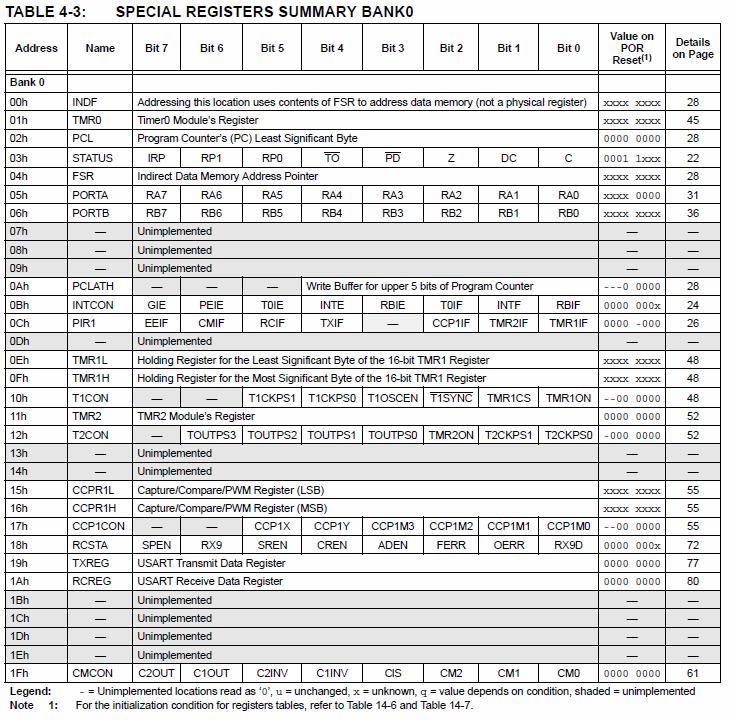
7 UNIDAD CENTRAL DE PROCESAMIENTO (CENTRAL PROCESSOR UNIT - CPU) Como indica su nombre, esto es una unidad que controla todos los procesos dentro del microcontrolador. Consiste en varias unidades más pequeñas, de las que las más importantes son: Decodificador de instrucciones es la parte que descodifica las instrucciones del programa y acciona otros circuitos basándose en esto. El conjunto de instrucciones que es diferente para cada familia de microcontrolador expresa las capacidades de este circuito. Unidad lógica aritmética (Arithmetical Logical Unit - ALU) realiza todas las operaciones matemáticas y lógicas sobre datos. REGISTROS o MEMORIA RAM Un registro o una celda de memoria es un circuito electrónico que puede memorizar el estado de un byte. Al apagar la fuente de alimentación, se pierde el contenido de la memoria RAM. Se utiliza para almacenar temporalmente los datos y los resultados inmediatos creados y utilizados durante el funcionamiento del microcontrolador. GPR (GENERAL PURPOSE REGISTERS O REGISTROS DE PROPÓSITO GENERAL) Son registros que pueden ser utilizados por el usuario para declarar variables. Por ejemplo, si el programa ejecuta la adición, es necesario tener un registro que representa lo que se llama suma en vida cotidiana. Con tal propósito, uno de los registros de la RAM es denominado suma y se utiliza para almacenar los resultados de la adición. SFR (SPECIAL FUNCTION REGISTERS o REGISTROS DE FUNCIÓN ESPECIAL) A diferencia de los registros que no tienen ninguna función especial y predeterminada, cada microcontrolador dispone de un número de registros de funciones especiales (SFR), con la función predeterminada por el fabricante. Sus bits están conectados a los circuitos internos del microcontrolador tales como temporizadores, convertidores A/D, osciladores entre otros, lo que significa que directamente manejan el funcionamiento de estos circuitos, o sea del microcontrolador. Imagínese ocho interruptores que manejan el funcionamiento de un circuito pequeño dentro del microcontrolador. Los registros SFR hacen exactamente lo mismo. El registro W Acumulador o registro de trabajo. Es un registro SFR estrechamente relacionado con el funcionamiento de la ALU. Es utilizado para almacenar todos los datos sobre los que se debe realizar alguna operación. También almacena los resultados preparados para el procesamiento futuro. Uno de los registros SFR, denominado Registro Status, está estrechamente relacionado con el acumulador. Muestra el estado de un número almacenado en el acumulador (el número es mayor o menor que cero etc.) en cualquier instante dado 6

8 7
9 8
10 9
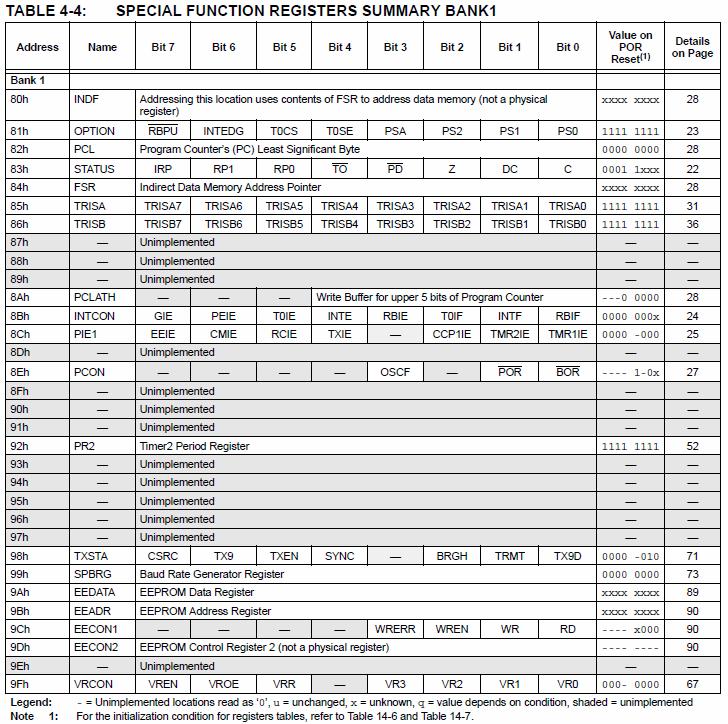
11 El Contador de Programas (PC) Los microcontroladores de la gama media disponen de un Contador de Programa (PC) de 13 bits, cuyos bits de menor peso corresponden a los 8 bits del registro PCL, implementado en la posición de memoria RAM 02h (y duplicado en la posición 82h),y los cinco bit de mayor peso del PC corresponden con los 5 bits de menor peso del registro PCLATCH, implementado en la posición de memoria RAM 0Ah (y duplicado en la posición 8Ah), lo que le permite direccionar hasta 8 K x 14 bits dividido en páginas de 2 K x 14 bits. Sin embargo, el PIC16C84 dispone tan solo de 1Kx14 bits de memoria implementada, desde la posición 0000h hasta la 03FFh, los 3 bit de mayor peso del PC no los tiene en cuenta, así pues la dirección 30h, 430h, 830h, C30h,1430h, 1830 y 1C30h se considera como la misma. PUERTOS DE ENTRADA/SALIDA (E/S) Para hacer útil un microcontrolador, hay que conectarlo a un dispositivo externo, o sea, a un periférico. Cada microcontrolador tiene uno o más registros (denominados puertos) conectados a los pines en el microcontrolador. Por qué se denominan como puertos de entrada/salida? Porque usted puede cambiar la función de cada pin como quiera. Por ejemplo, usted desea que su dispositivo encienda y apague las tres señales LEDs y que simultáneamente monitoree el estado lógico de 5 sensores o botones de presión. Uno de los puertos debe estar configurado de tal manera que haya tres salidas (conectadas a los LEDs) y cinco entradas (conectadas a los sensores). Eso se realiza simplemente por medio de software, lo que significa que la función de algún pin puede ser cambiada durante el funcionamiento. Una de las características más importantes de los pines de entrada/salida (E/S) es la corriente máxima que pueden entregar/recibir. En la mayoría de los microcontroladores la corriente obtenida de un pin es suficiente para activar un LED u otro dispositivo de baja corriente (10-20mA). Mientras más pines de E/S haya, más baja es la corriente máxima de un pin. En otras palabras, todos los puertos de E/S comparten la corriente máxima declarada en la hoja de especificación técnica del microprocesador. Otra característica importante de los pines es que pueden disponer de los resistores pull-up. Estos resistores conectan los pines al polo positivo del voltaje de la fuente de alimentación y su efecto se puede ver al configurar el pin como una entrada conectada a un interruptor mecánico o a un botón de presión. Las últimas versiones de los microcontroladores tienen las resistencias pull-up configurables por software. Cada puerto de E/S normalmente está bajo el control de un registro SFR especializado, lo que significa que cada bit de ese registro determina el estado del pin correspondiente en el el microcontrolador. Por ejemplo, al escribir un uno lógico (1) a un bit del registro de control (SFR), el pin apropiado del puerto se configura automáticamente como salida. Eso significa que el voltaje llevado a ese pin se puede leer como 0 o 1 lógico. En caso contrario, al escribir 0 al registro SFR, el pin apropiado del puerto se configura como salida. Su voltaje (0V o 5V) corresponde al estado del bit apropiado del registro del puerto. 10
12 MEMORIA ROM (READ ONLY MEMORY) - MEMORIA DE SÓLO LECTURA La memoria ROM se utiliza para guardar permanentemente el programa que se está ejecutando. El tamaño de programa que se puede escribir depende del tamaño de esta memoria. Los microcontroladores actuales normalmente utilizan el direccionamiento de 16 bits, que significa que son capaces de direccionar hasta 64 Kb de memoria, o sea localidades. Por ejemplo, si usted es principiante, su programa excederá pocas veces el límite de varios cientos de instrucciones. Hay varios tipos de memoria ROM. OSCILADOR Los pulsos uniformes generados por el oscilador permiten el funcionamiento armónico y síncrono de todos los circuitos del microcontrolador. El oscilador se configura normalmente de tal manera que utilice un cristal de cuarzo o resonador cerámico para estabilización de frecuencia. Además, puede funcionar como un circuito autónomo (como oscilador RC). Es importante decir que las instrucciones del programa no se ejecutan a la velocidad impuesta por el mismo oscilador sino varias veces más despacio. Eso ocurre porque cada instrucción se ejecuta en varios ciclos del oscilador. En algunos microcontroladores se necesita el mismo número de ciclos para ejecutar todas las instrucciones, mientras que en otros el tiempo de ejecución no es el mismo para todas las instrucciones. Por consiguiente, si el sistema utiliza el cristal de cuarzo con una frecuencia de 20 MHZ, el tiempo de ejecución de una instrucción de programa no es 50 ns, sino 200, 400 o 800 ns dependiendo del tipo del microcontrolador. 11
13 JUEGO DE INSTRUCCIONES El juego de instrucciones para los microcontroladores 16F8XX incluye 35 instrucciones en total. La razón para un número tan reducido de instrucciones yace en la arquietectura RISC. Esto quiere decir que las instrucciones son bien optimizadas desde el aspecto de la velocidad operativa, la sencillez de la arquitectura y la compacidad del código. Lo malo de la arquitectura RISC es que se espera del programador que haga frente a estas instrucciones. Por supuesto, esto es relevante sólo si se utiliza el lenguaje ensamblador para la programación. Así, sólo se tienen que utilizar instrucciones relativamente simples. 12
14 I N S T R U C C I Ó N D E S C R I P C I Ó N O P E R A C I Ó N B A N D E R A C L K * Instrucciones para la transmisión de datos MOVLW k Mover literal a W k -> w 1 MOVWF f Mover el contenido de W a f W -> f 1 MOVF f,d Mover el contenido de f a d f -> d Z 1 1, 2 CLRW Borrar el contenido de W 0 -> W Z 1 CLRF f Borrar el contenido de f 0 -> f Z 1 2 SWAPF f,d Intercambiar de nibbles en f f(7:4),(3:0) -> f(3:0),(7:4) 1 1, 2 Instrucciones aritmético - lógicas ADDLW k Sumar literal a W W+k -> W C, DC, Z 1 ADDWF f,d Sumar el contenido de W y f W+f -> d C, DC,Z 1 1, 2 SUBLW k Restar W de literal k-w -> W C, DC, Z 1 SUBWF f,d Restar W de f f-w -> d C, DC, Z 1 1, 2 ANDLW k AND W con literal W AND k -> W Z 1 ANDWF f,d AND W con f W AND f -> d Z 1 1, 2 IORLW k OR inclusivo de W con literal W OR k -> W Z 1 IORWF f,d OR inclusivo de W con f W OR f -> d Z 1 1, 2 XORWF f,d OR exclusivo de W con literal W XOR k -> W Z 1 1, 2 XORLW k OR exclusivo de W con f W XOR f -> d Z 1 INCF f,d Sumar 1 a f f+1 -> f Z 1 1, 2 DECF f,d Restar 1 a f f-1 -> f Z 1 1, 2 RLF f,d Rotar F a la izquierda a través del bit de Acarreo C 1 1, 2 RRF f,d Rotar F a la derecha a través del bit de Acarreo C 1 1, 2 COMF f,d Complementar f f -> d Z 1 1, 2 Instrucciones orientadas a bit BCF f,b Poner a 0 el bit b del registro f 0 -> f(b) 1 1, 2 BSF f,b Poner a 1 el bit b del registro f 1 -> f(b) 1 1, 2 Instrucciones de control de programa BTFSC f,b Saltar si bit b de registro f es 0 Skip if f(b) = 0 1 (2) 3 BTFSS f,b Saltar si bit b de reg. f es 1 Skip if f(b) = 1 1 (2) 3 DECFSZ f,d Disminuir f en 1. Saltar si el resultado es 0 f-1 -> d skip if Z = 1 1 (2) 1, 2, 3 INCFSZ f,d Incrementar f en 1. Saltar si el resultado es 1 f+1 -> d skip if Z = 0 1 (2) 1, 2, 3 GOTO k Saltar a una dirección k -> PC 2 CALL k Llamar a una subrutina PC -> TOS, k -> PC 2 RETURN Retornar de una subrutina TOS -> PC 2 RETLW k Retornar con literal en W k -> W, TOS -> PC 2 RETFIE Retornar de una interupción TOS -> PC, 1 -> GIE 2 Otras instrucciones NOP No operación TOS -> PC, 1 -> GIE 1 CLRWDT Reiniciar el temporizador perro guardián 0 -> WDT, 1 -> TO, 1 -> PD TO, PD 1 SLEEP Poner en estado de reposo 0 -> WDT, 1 -> TO, 0 -> PD TO, PD 1 13
 Una compuerta lógica Y dispone de dos o más entradas y de una salida. En este caso la compuerta utilizada dispone de sólo dos entradas.")

15 CIRCUITOS LÓGICOS Algunas instrucciones de programa utilizadas por un microcontrolador funcionan de la misma manera que las compuertas lógicas, pero en forma de comandos. COMPUERTA Y (AND) Una compuerta lógica Y dispone de dos o más entradas y de una salida. En este caso la compuerta utilizada dispone de sólo dos entradas. Un uno lógico (1) aparecerá en su salida sólo en caso de que ambas entradas (A Y B) sean llevadas a alto (1). La tabla a la derecha es la tabla de verdad que muestra la relación entre las entradas y salidas de la compuerta. El principio de funcionamiento es el mismo cuando la compuerta disponga de más de dos entradas: la salida proporciona un uno lógico (1) sólo si todas las entradas son llevadas a alto (1). Cualquier otra combinación de voltajes de entrada proporcionará un cero lógico (0) en su salida. Utilizada en el programa, la operación Y lógico se refiere a la realización de este tipo de operación sobre los bits correspondientes de dos registros diferentes. COMPUERTA O (OR) De manera similar, la compuerta O también dispone de dos o más entradas y de una salida. Si la compuerta dispone de sólo dos entradas, es aplicable lo siguiente: la salida proporciona un uno lógico (1) si una u otra entrada (A o B) es llevada a alto (1). En caso de que la compuerta O disponga de más de dos entradas, es aplicable lo siguiente: La salida proporciona un uno lógico (1) si por lo menos una entrada es llevada a alto (1). Si todas las entradas están a cero lógico (0), la salida estará a cero lógico (0) también. En un programa, la operación O lógica se realiza de la misma manera que la operación Y. 14
 aparezca en su entrada, la salida proporciona un uno lógico (1) y viceversa.")
16 COMPUERTA NO (NOT) La compuerta lógica NO dispone de una sola entrada y una sola salida, por lo que funciona muy simplemente. Cuando un cero lógico (0) aparezca en su entrada, la salida proporciona un uno lógico (1) y viceversa. Esto significa que esta compuerta invierte las señales por sí mismas y por eso es denominada inversor. En el programa la operación lógica NO se realiza sobre un byte. El resultado es un byte con los bits invertidos. Si los bits de un byte se consideran número, el valor invertido es un complemento a ese número. El complemento de un número es el valor que se añade al número hasta llegar al mayor número binario de 8 dígitos. En otras palabras, la suma de un dígito de 8 números y de su complemento es siempre 255. COMPUERTA XOR (O EXCLUSIVA) La compuerta XOR (O EXCLUSIVA) representa una combinación de todas las compuertas anteriormente descritas. La salida proporciona un uno lógico (1) sólo si sus entradas están en estados lógicos diferentes. En el programa, esta operación se utiliza con frecuencia para comparar dos bytes. La resta se puede utilizar con el mismo propósito (si el resultado es 0, los bytes son iguales). A diferencia de la resta, la ventaja de esta operación lógica es que no es posible obtener los resultados negativos. 15
Características generales
 REPERTORIO DE INSTRUCCIONES En esta sección se pretende: Conocer las características generales de las instrucciones para el PIC16F84 Los distintos modos de direccionamiento, y Los diferentes grupos de
REPERTORIO DE INSTRUCCIONES En esta sección se pretende: Conocer las características generales de las instrucciones para el PIC16F84 Los distintos modos de direccionamiento, y Los diferentes grupos de
SISTEMA DE NUMERACIÓN DECIMAL
 SISTEMA DE NUMERACIÓN DECIMAL La matemática es una gran ciencia! Todo es tan lógico y simple... El universo de los números se puede describir con sólo diez dígitos. No obstante, realmente tiene que ser
SISTEMA DE NUMERACIÓN DECIMAL La matemática es una gran ciencia! Todo es tan lógico y simple... El universo de los números se puede describir con sólo diez dígitos. No obstante, realmente tiene que ser
INSTRUCCIONES DE ENSAMBLADOR
 MPLAB INSTRUCCIONES DE ENSAMBLADOR ORGANIZACIÓN de la MEMORIA Dentro del PIC16F877 se distinguen tres bloques de memoria. Memoria de programa En sus 8192 posiciones (8K) contiene el programa con las instrucciones
MPLAB INSTRUCCIONES DE ENSAMBLADOR ORGANIZACIÓN de la MEMORIA Dentro del PIC16F877 se distinguen tres bloques de memoria. Memoria de programa En sus 8192 posiciones (8K) contiene el programa con las instrucciones
Instrucciones para programar el PIC16F877
 Instrucciones para programar el PIC16F877 2 Estos microcontroladores responden a una serie de instrucciones o códigos que se deben grabar en su memoria de programa, en total son 35. A continuación se encuentra
Instrucciones para programar el PIC16F877 2 Estos microcontroladores responden a una serie de instrucciones o códigos que se deben grabar en su memoria de programa, en total son 35. A continuación se encuentra
Practica de PIC 16F84
 Practica de PIC 16F84 Los PIC son circuitos que pueden controlar dispositivos y diferentes sistemas, son como los PLC (controles lógico programable), además debo decir que es un circuito que tiene todas
Practica de PIC 16F84 Los PIC son circuitos que pueden controlar dispositivos y diferentes sistemas, son como los PLC (controles lógico programable), además debo decir que es un circuito que tiene todas
Las Instrucciones. A continuación vamos a presentar el conjunto de instrucciones básico de los Microcontroladores Picmicro.
 Las Instrucciones A continuación vamos a presentar el conjunto de instrucciones básico de los Microcontroladores Picmicro. En general la instrucciones de los microcontroladores pueden clasificarse como:
Las Instrucciones A continuación vamos a presentar el conjunto de instrucciones básico de los Microcontroladores Picmicro. En general la instrucciones de los microcontroladores pueden clasificarse como:
Set de instrucciones Microcontrolador PIC.
 Microcontroladores Pic 16F84A. Los PIC son una extensa familia microcontroladores divididos en tres gamas, la gama baja con memoria programa 12 bits, la gama media y la gama alta con memoria programa 14
Microcontroladores Pic 16F84A. Los PIC son una extensa familia microcontroladores divididos en tres gamas, la gama baja con memoria programa 12 bits, la gama media y la gama alta con memoria programa 14
UNIDAD IV PROGRAMACION. Programación del microcontrolador
 UNIDAD IV PROGRAMACION Programación del microcontrolador Para grabar la memoria de programa el microcontrolador debe llevarse a un modo especial de trabajo suministrando 13.5V a la línea MCLR y el voltaje
UNIDAD IV PROGRAMACION Programación del microcontrolador Para grabar la memoria de programa el microcontrolador debe llevarse a un modo especial de trabajo suministrando 13.5V a la línea MCLR y el voltaje
ARQUITECTURA DEL PIC16F84A
 ARQUITECTURA DEL PIC16F84A Arquitectura interna del PIC16F84A CPU ALU Decodificador de Instrucciones - Buses Registro de trabajo W PC Contador de Programa Organización de la memoria Memoria de Programa
ARQUITECTURA DEL PIC16F84A Arquitectura interna del PIC16F84A CPU ALU Decodificador de Instrucciones - Buses Registro de trabajo W PC Contador de Programa Organización de la memoria Memoria de Programa
El único lenguaje que entienden los microcontroladores es el código máquina formado por ceros y unos del sistema binario.
 1 LENGUAJE ENSAMBLADOR El único lenguaje que entienden los microcontroladores es el código máquina formado por ceros y unos del sistema binario. El lenguaje ensamblador expresa las instrucciones de una
1 LENGUAJE ENSAMBLADOR El único lenguaje que entienden los microcontroladores es el código máquina formado por ceros y unos del sistema binario. El lenguaje ensamblador expresa las instrucciones de una
GAMA BAJA (PIC16C5X) ARQUITECTURA BÁSICA
 ARQUITECTURA BÁSICA") GAMA BAJA (PIC6CX) ARQUITECTURA BÁSICA Instrucciones -bit de palabra de instrucción ROM/EPROM desde a 04 palabras Hasta 4 páginas (xbits) de memoria de programa -bit de datos RAM desde a bytes Hasta 4
GAMA BAJA (PIC6CX) ARQUITECTURA BÁSICA Instrucciones -bit de palabra de instrucción ROM/EPROM desde a 04 palabras Hasta 4 páginas (xbits) de memoria de programa -bit de datos RAM desde a bytes Hasta 4
UNIVERSIDAD NACIONAL DE COLOMBIA SEDE BOGOTÁ FACULTAD DE INGENIERÍA INGENIERÍA MECATRÓNICA
 UNIVERSIDAD NACIONAL DE COLOMBIA SEDE BOGOTÁ FACULTAD DE INGENIERÍA INGENIERÍA MECATRÓNICA INTRODUCCIÓN AL PIC NOMENCLATURA ARQUITECTURA. TEMPORIZACIÓN. SET DE INSTRUCCIONES. MODOS DE DIRECCIONAMIENTO.
UNIVERSIDAD NACIONAL DE COLOMBIA SEDE BOGOTÁ FACULTAD DE INGENIERÍA INGENIERÍA MECATRÓNICA INTRODUCCIÓN AL PIC NOMENCLATURA ARQUITECTURA. TEMPORIZACIÓN. SET DE INSTRUCCIONES. MODOS DE DIRECCIONAMIENTO.
MICROCONTROLADORES. 1. El PIC 16F84A es un microcontrolador de: a) 16 bits b) 8 bits c) 4 bits d) 32 bits e) 64 bits
 16 bits b) 8 bits c) 4 bits d) 32 bits e) 64 bits") 1. El PIC 16F84A es un microcontrolador de: a) 16 bits b) 8 bits c) 4 bits d) 32 bits e) 64 bits MICROCONTROLADORES 2. La memoria de programa del PIC 16F84A es de tipo: a) ROM b) OTP c) RAM d) EPROM e)
1. El PIC 16F84A es un microcontrolador de: a) 16 bits b) 8 bits c) 4 bits d) 32 bits e) 64 bits MICROCONTROLADORES 2. La memoria de programa del PIC 16F84A es de tipo: a) ROM b) OTP c) RAM d) EPROM e)
Tema 4. Organización de la memoria
 Tema 4 Organización de la memoria 1 ARQUITECTURA DEL PIC16F84 Tema 4. Organización de la memoria Memoria de programa tipo ROM Flash de 1024 registros de 14 bits Memoria de datos dividida en dos áreas:
Tema 4 Organización de la memoria 1 ARQUITECTURA DEL PIC16F84 Tema 4. Organización de la memoria Memoria de programa tipo ROM Flash de 1024 registros de 14 bits Memoria de datos dividida en dos áreas:
Introducción a la arquitectura PIC
 18 de septiembre de 2012 Contenido 1 Microprocesadores y Microcontroladores 2 3 4 Microprocesadores y Microcontroladores Microcomputadora consiste básicamente de: Unidad central de procesamiento (CPU),
18 de septiembre de 2012 Contenido 1 Microprocesadores y Microcontroladores 2 3 4 Microprocesadores y Microcontroladores Microcomputadora consiste básicamente de: Unidad central de procesamiento (CPU),
SISTEMAS ELECTRONICOS DIGITALES DIRECCIONAMIENTO DE REGISTROS
 SISTEMAS ELECTRONICOS DIGITALES DIRECCIONAMIENTO DE REGISTROS Las líneas de entrada-salida digitales del PIC16X84 llamadas puertas(puertos), PUERTA A Y PUERTA B, que se denominan PA y PB. En este caso
SISTEMAS ELECTRONICOS DIGITALES DIRECCIONAMIENTO DE REGISTROS Las líneas de entrada-salida digitales del PIC16X84 llamadas puertas(puertos), PUERTA A Y PUERTA B, que se denominan PA y PB. En este caso
Sistemas con Microprocesadores I
 Sistemas con Microprocesadores I 1 Microcontroladores Introducción Harvard vs. von-neumann Clasificación del procesador Segmentado o Pipeline Ortogonal vs. No ortogonal 2 Microcontroladores PIC Siglas
Sistemas con Microprocesadores I 1 Microcontroladores Introducción Harvard vs. von-neumann Clasificación del procesador Segmentado o Pipeline Ortogonal vs. No ortogonal 2 Microcontroladores PIC Siglas
O B J E T I V O I N T R O D U C C I O N M A R C O T E O R I C O
 O B J E T I V O Realizar un contador decimal que se exhiba en un display de 7 segmentos, cada número deberá estar exhibido durante un segundo. I N T R O D U C C I O N En la mayoría de los sistemas electrónicos
O B J E T I V O Realizar un contador decimal que se exhiba en un display de 7 segmentos, cada número deberá estar exhibido durante un segundo. I N T R O D U C C I O N En la mayoría de los sistemas electrónicos
Microcontroladores PIC
 Introducción Los microcontroladores son procesadores que poseen memoria y dispositivo de entrada salida todo encapsulado en un mismo integrado, lo que permite su uso sin la necesidad de estar disponiendo
Introducción Los microcontroladores son procesadores que poseen memoria y dispositivo de entrada salida todo encapsulado en un mismo integrado, lo que permite su uso sin la necesidad de estar disponiendo
Tema 6: Microcontroladores
 Tema 6: Microcontroladores Carlos Garre del Olmo 1 Microcontroladores Contenidos Introducción a los microcontroladores. Principales familias y sus características. La familia PIC16. Programación de microcontroladores.
Tema 6: Microcontroladores Carlos Garre del Olmo 1 Microcontroladores Contenidos Introducción a los microcontroladores. Principales familias y sus características. La familia PIC16. Programación de microcontroladores.
Programación de microcontroladores usos y aplicaciones. Desde Ensamblador a C.
 Programación de microcontroladores usos y aplicaciones. Desde Ensamblador a C. Familias 8-bit de Microchip: PIC10F, PIC12F, PIC16F y PIC18F /cursos/microchip/ Espinher Electróingeniería, S.A. de C.V. Ing.
Programación de microcontroladores usos y aplicaciones. Desde Ensamblador a C. Familias 8-bit de Microchip: PIC10F, PIC12F, PIC16F y PIC18F /cursos/microchip/ Espinher Electróingeniería, S.A. de C.V. Ing.
SISTEMA MÍNIMO BASADO EN EL PIC16F84
 PRÁCTICA 0 CIRCUITO BASE SISTEMA MÍNIMO BASADO EN EL PIC16F84 1 PRÁCTICA 1_1 COMPUERTA AND DE TRES ENTRADAS Hardware X0 X1 X2 Y 2 Comportamiento esperado INICIO Configurar Puerto A como entradas y Puerto
PRÁCTICA 0 CIRCUITO BASE SISTEMA MÍNIMO BASADO EN EL PIC16F84 1 PRÁCTICA 1_1 COMPUERTA AND DE TRES ENTRADAS Hardware X0 X1 X2 Y 2 Comportamiento esperado INICIO Configurar Puerto A como entradas y Puerto
PIC s 1ª PARTE RESUMEN Y EJERCICIOS_06/07
 PIC s 1ª PARTE RESUMEN Y EJERCICIOS_06/07 INDICE 1-Microcontroladores, arquitectura PIC. 2-Hardware PIC 16f84. Bancos de registros. 3-Grabación del PIC. Listado Instrucciones 4-Líneas de I/O del PIC 5-Directivas
PIC s 1ª PARTE RESUMEN Y EJERCICIOS_06/07 INDICE 1-Microcontroladores, arquitectura PIC. 2-Hardware PIC 16f84. Bancos de registros. 3-Grabación del PIC. Listado Instrucciones 4-Líneas de I/O del PIC 5-Directivas
Microcontrolador PIC16F84: Arquitectura
 Microcontrolador PIC16F84: Arquitectura La arquitectura del PIC es tipo Harvard: Mem. de Programa (instrucciones) (tipo FLASH) Control DIR DATOS µp (tipo RISC, pipeline de 2 etapas) Control DIR DATOS 14
Microcontrolador PIC16F84: Arquitectura La arquitectura del PIC es tipo Harvard: Mem. de Programa (instrucciones) (tipo FLASH) Control DIR DATOS µp (tipo RISC, pipeline de 2 etapas) Control DIR DATOS 14
Control de pantallas de cristal líquido mediante PIC
 INGENIERÍA Control de pantallas de cristal líquido mediante PIC Ejemplo práctico de interconexión y control de una pantalla de cristal líquido (LCD) por un microcontrolador PIC CELESTINO BENÍTEZ VÁZQUEZ
INGENIERÍA Control de pantallas de cristal líquido mediante PIC Ejemplo práctico de interconexión y control de una pantalla de cristal líquido (LCD) por un microcontrolador PIC CELESTINO BENÍTEZ VÁZQUEZ
PRÁCTICA 2: Programas básicos. Tipos de direccionamiento.
 SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 2: Programas básicos. Tipos de direccionamiento. Tipos de direccionamiento Ejemplos y ejercicios - 1 - 1. Objetivos - Introducir
SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 2: Programas básicos. Tipos de direccionamiento. Tipos de direccionamiento Ejemplos y ejercicios - 1 - 1. Objetivos - Introducir
Implementación de un microcontrolador sencillo
 Microelectrónica, 4 o Curso, P94 Implementación de un microcontrolador sencillo M. L. López Vallejo P. Ituero y C. López Barrio Abril 200 Índice 1. Arquitectura del PIC 1 1.1. Organización de la memoria..............................
Microelectrónica, 4 o Curso, P94 Implementación de un microcontrolador sencillo M. L. López Vallejo P. Ituero y C. López Barrio Abril 200 Índice 1. Arquitectura del PIC 1 1.1. Organización de la memoria..............................
2.- Descripción General del PIC16F877
 2.- Descripción General del PIC16F877 2.1.- La Familia del PIC16F877 El microcontrolador PIC16F877 de Microchip pertenece a una gran familia de microcontroladores de 8 bits (bus de datos) que tienen las
2.- Descripción General del PIC16F877 2.1.- La Familia del PIC16F877 El microcontrolador PIC16F877 de Microchip pertenece a una gran familia de microcontroladores de 8 bits (bus de datos) que tienen las
Arquitectura de Computadoras
 Arquitectura de Computadoras Dr. Andrés David García García Escuela de Diseño, Ingeniería y Arquitectura Departamento de Mecatrónica 1 Microprocesadores y Periféricos Objetivos: Analizar la arquitectura
Arquitectura de Computadoras Dr. Andrés David García García Escuela de Diseño, Ingeniería y Arquitectura Departamento de Mecatrónica 1 Microprocesadores y Periféricos Objetivos: Analizar la arquitectura
PIC Programable Integrates Circuit o Peripheral Interface Controller
 PIC Programable Integrates Circuit o Peripheral Interface Controller un microprocesador es un sistema abierto porque su configuración es variable de acuerdo con la aplicación a la que se destine. Es diferente
PIC Programable Integrates Circuit o Peripheral Interface Controller un microprocesador es un sistema abierto porque su configuración es variable de acuerdo con la aplicación a la que se destine. Es diferente
MICROCONTROLADOR PIC DE MICROCHIP
 MICROCONTROLADOR PIC DE MICROCHIP PIC16F877-28-PIN 8-BIT CMOS FLASH MICROCONTROLLER PIC16F877: ESTRUCTURA INTERNA Bus de Datos Bus de Datos (programa) Registro de trabajo (acumulador) Conversor A/D Contador/Temporizador
MICROCONTROLADOR PIC DE MICROCHIP PIC16F877-28-PIN 8-BIT CMOS FLASH MICROCONTROLLER PIC16F877: ESTRUCTURA INTERNA Bus de Datos Bus de Datos (programa) Registro de trabajo (acumulador) Conversor A/D Contador/Temporizador
Tema: Microprocesadores
 Universidad Nacional de Ingeniería Arquitectura de Maquinas I Unidad I: Introducción a los Microprocesadores y Microcontroladores. Tema: Microprocesadores Arq. de Computadora I Ing. Carlos Ortega H. 1
Universidad Nacional de Ingeniería Arquitectura de Maquinas I Unidad I: Introducción a los Microprocesadores y Microcontroladores. Tema: Microprocesadores Arq. de Computadora I Ing. Carlos Ortega H. 1
Indice. Escrito por Administrator Martes, 02 de Septiembre de 2008 17:45 - Actualizado Domingo, 20 de Septiembre de 2009 07:45 1 / 15
 1 / 15 El contenido del libro " MICROCONTROLADOR PIC16F84. Desarrollo de proyectos " de la Editorial Ra CAPÍTULOS: 1. MICROCONTROLADOR PIC16F84 2. PERIFÉRICOS BÁSICOS 3. GRABACIÓN DE MICROCONTROLADORES
1 / 15 El contenido del libro " MICROCONTROLADOR PIC16F84. Desarrollo de proyectos " de la Editorial Ra CAPÍTULOS: 1. MICROCONTROLADOR PIC16F84 2. PERIFÉRICOS BÁSICOS 3. GRABACIÓN DE MICROCONTROLADORES
Bucles: o Bucles infinitos o Bucles finitos o Bucles anidados Medir tiempos con MPLAB Ejemplos y ejercicios
 SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 3: Bucles Bucles: o Bucles infinitos o Bucles finitos o Bucles anidados Medir tiempos con MPLAB Ejemplos y ejercicios -
SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 3: Bucles Bucles: o Bucles infinitos o Bucles finitos o Bucles anidados Medir tiempos con MPLAB Ejemplos y ejercicios -
Lenguaje binario. Código ASCII. Medidas de la información
 Hardware y Software (1/5) Lenguaje binario Los ordenadores sólo entienden 1 y 0. Lógica positiva: 0: no hay señal 1: hay señal Código ASCII Medidas de la información Unidad mínima de información: BIT (0
Hardware y Software (1/5) Lenguaje binario Los ordenadores sólo entienden 1 y 0. Lógica positiva: 0: no hay señal 1: hay señal Código ASCII Medidas de la información Unidad mínima de información: BIT (0
Programación en PIC Los primeros pasos
 Capítulo V Programación en PIC Los primeros pasos Encender y apagar un LED Secuenciador con cuatro LED's Leer los pulsadores y encender el LED correspondiente Programa avanzado utilizando el entrenador
Capítulo V Programación en PIC Los primeros pasos Encender y apagar un LED Secuenciador con cuatro LED's Leer los pulsadores y encender el LED correspondiente Programa avanzado utilizando el entrenador
1. Proponer un circuito que tenga el puerto b como salida conectando 8 leds, realizando un programa que me encienda los bits 0, 1, 3, 5, 7.
 1. Proponer un circuito que tenga el puerto b como salida conectando 8 leds, realizando un programa que me encienda los bits 0, 1, 3, 5, 7. a. Diagrama de flujo b. Circuito C1 4 MHZ C2 R2 10k 16 15 4 R1
1. Proponer un circuito que tenga el puerto b como salida conectando 8 leds, realizando un programa que me encienda los bits 0, 1, 3, 5, 7. a. Diagrama de flujo b. Circuito C1 4 MHZ C2 R2 10k 16 15 4 R1
D:\ACCESO\ACCESO.ASM. list p=16f877 include "p16f877.inc" ROTA equ 0x20 TEMP equ 0x21 TECLA equ 0x22 DIGITOS equ 0x23 DIR equ 0x24
 ;Programa para el control de acceso a un sistema X ;mediante la introducción de una clave a través de un teclado ;matricial. ;Es posible cambiar la clave de acceso y guardarla en la EEPROM ;La velocidad
;Programa para el control de acceso a un sistema X ;mediante la introducción de una clave a través de un teclado ;matricial. ;Es posible cambiar la clave de acceso y guardarla en la EEPROM ;La velocidad
MICROCONTROLADORES PIC16F84 ING. RAÚL ROJAS REÁTEGUI
 MICROCONTROLADORES PIC16F84 ING. RAÚL ROJAS REÁTEGUI DEFINICIÓN Es un microcontrolador de Microchip Technology fabricado en tecnología CMOS, completamente estático es decir si el reloj se detiene los datos
MICROCONTROLADORES PIC16F84 ING. RAÚL ROJAS REÁTEGUI DEFINICIÓN Es un microcontrolador de Microchip Technology fabricado en tecnología CMOS, completamente estático es decir si el reloj se detiene los datos
Programación y Aplicaciones de los Microcontroladores PIC16FXXX (Nivel Básico) ING. EULER DEZA FIGUEROA
 ING. EULER DEZA FIGUEROA") Programación y Aplicaciones de los Microcontroladores PIC16FXXX (Nivel Básico) ING. EULER DEZA FIGUEROA ESTRUCTURA Y CONTENIDO: SESIONES DE CLASE CONTENIDOS PRACTICA PRIMERA (5 horas ) SEGUNDA (5 horas
Programación y Aplicaciones de los Microcontroladores PIC16FXXX (Nivel Básico) ING. EULER DEZA FIGUEROA ESTRUCTURA Y CONTENIDO: SESIONES DE CLASE CONTENIDOS PRACTICA PRIMERA (5 horas ) SEGUNDA (5 horas
PRÁCTICA 4 LOS BITS DE CONFIGURACIÓN DEL PIC16F628
 Los Bits de Configuración del PIC16F628 44 PRÁCTICA 4 LOS BITS DE CONFIGURACIÓN DEL PIC16F628 OBJETIVOS Identificar cada uno de los bits de configuración que rigen el funcionamiento del PIC16F628. Verificar
Los Bits de Configuración del PIC16F628 44 PRÁCTICA 4 LOS BITS DE CONFIGURACIÓN DEL PIC16F628 OBJETIVOS Identificar cada uno de los bits de configuración que rigen el funcionamiento del PIC16F628. Verificar
Microcontrolador PIC 16F84
 INTRODUCCIÓN A LA PROGRAMACIÓN Microcontrolador PIC 16F84 mail : enric.serra 0 - INTRODUCCIÓN. Este documento es una introducción a la programación del PIC 16f84. Este documento se puede copiar y utilizar
INTRODUCCIÓN A LA PROGRAMACIÓN Microcontrolador PIC 16F84 mail : enric.serra 0 - INTRODUCCIÓN. Este documento es una introducción a la programación del PIC 16f84. Este documento se puede copiar y utilizar
UNIDAD I CONCEPTOS GENERALES. Conceptos Generales Microprocesadores Otoño 2011
 1 UNIDAD I CONCEPTOS GENERALES Fall 2011 Conceptos Generales Microprocesadores Otoño 2011 Contenido 2 Introducción Arquitectura generalizada de una computadora Componentes de una computadora Conjunto de
1 UNIDAD I CONCEPTOS GENERALES Fall 2011 Conceptos Generales Microprocesadores Otoño 2011 Contenido 2 Introducción Arquitectura generalizada de una computadora Componentes de una computadora Conjunto de
Sistemas Informáticos
 Sistemas Informáticos Informática Conjunto de conocimientos científicos y técnicos que hacen posible el tratamiento automático de la información. Término de 1962 INFORmaciónautoMÁTICA Organizar, almacenar,
Sistemas Informáticos Informática Conjunto de conocimientos científicos y técnicos que hacen posible el tratamiento automático de la información. Término de 1962 INFORmaciónautoMÁTICA Organizar, almacenar,
CODIGO EN ASSEMBLER TRANSMISOR. list p=16f876 ;selecion de pic
 TRANSMISOR CODIGO EN ASSEMBLER list p=16f876 ;selecion de pic radix hex ; codigo hex indf equ 0h ;direcionamiento indirecto tmro equ 1h ;contador de tiempo real pc equ 2h ;contador del programa status
TRANSMISOR CODIGO EN ASSEMBLER list p=16f876 ;selecion de pic radix hex ; codigo hex indf equ 0h ;direcionamiento indirecto tmro equ 1h ;contador de tiempo real pc equ 2h ;contador del programa status
TEMA 5 LA MEMORIA DE DATOS MEMORIA RAM D.P.E. DESARROLLO DE PROYECTOS 1
 TEMA 5 LA MEMORIA DE DATOS MEMORIA RAM D.P.E. DESARROLLO DE PROYECTOS 1 Estructura De La Memoria Ram (1) La memoria de datos RAM está dividida en dos partes diferenciadas: 1.- Zona SFR o zona de Registros
TEMA 5 LA MEMORIA DE DATOS MEMORIA RAM D.P.E. DESARROLLO DE PROYECTOS 1 Estructura De La Memoria Ram (1) La memoria de datos RAM está dividida en dos partes diferenciadas: 1.- Zona SFR o zona de Registros
Registros SFR vistos hasta ahora: Microcontroladores PIC
 Registros SFR vistos hasta ahora: Microcontroladores PIC Microcontroladores PIC: Timer Características del Timer TMR0: Cumple básicamente la función de contador de eventos (o divisor de frecuencia). El
Registros SFR vistos hasta ahora: Microcontroladores PIC Microcontroladores PIC: Timer Características del Timer TMR0: Cumple básicamente la función de contador de eventos (o divisor de frecuencia). El
Unidad 2: Taller de Cómputo. Estructura y Componentes de la Computadora UNIDAD DOS: INTRODUCCIÓN
 UNIDAD DOS: INTRODUCCIÓN Una computadora es una máquina electrónica diseñada para manipular y procesar información de acuerdo a un conjunto de ordenes o programas. para que esto sea posible se requiere
UNIDAD DOS: INTRODUCCIÓN Una computadora es una máquina electrónica diseñada para manipular y procesar información de acuerdo a un conjunto de ordenes o programas. para que esto sea posible se requiere
CODIGO EN ASSEMBLER ;************************************************************************
 RECEPTOR CODIGO EN ASSEMBLER ;************************************************************************ list p=16f84a ;selecion de pic radix hex ; codigo hex pc equ 02h status equ 03h portb equ 06h PORTA
RECEPTOR CODIGO EN ASSEMBLER ;************************************************************************ list p=16f84a ;selecion de pic radix hex ; codigo hex pc equ 02h status equ 03h portb equ 06h PORTA
B) Arquitectura generalizada de una computadora
 Arquitectura generalizada de una computadora") Microprocesadores B) Arquitectura generalizada de una computadora LAS COMPONENTES PRINCIPALES UNA MICROCOMPUTADORA SON: La Unidad Central de Procesamiento,CPU constituido por el Microprocesador Microprocesadores
Microprocesadores B) Arquitectura generalizada de una computadora LAS COMPONENTES PRINCIPALES UNA MICROCOMPUTADORA SON: La Unidad Central de Procesamiento,CPU constituido por el Microprocesador Microprocesadores
ESCUELA POLITÉCNICA NACIONAL
 ESCUELA POLITÉCNICA NACIONAL ESCUELA DE FORMACIÓN TECNOLÓGICA MÓDULO PARA VERIFICAR EL FUNCIONAMIENTO DE LOS PROGRAMAS GRABADOS EN EL PIC 16F84A PROYECTO PREVIO A LA OBTENCIÓN DEL TÍTULO DE TECNÓLOGO EN
ESCUELA POLITÉCNICA NACIONAL ESCUELA DE FORMACIÓN TECNOLÓGICA MÓDULO PARA VERIFICAR EL FUNCIONAMIENTO DE LOS PROGRAMAS GRABADOS EN EL PIC 16F84A PROYECTO PREVIO A LA OBTENCIÓN DEL TÍTULO DE TECNÓLOGO EN
Unidad IV: Programación de microcontroladores
 Unidad IV: Programación de microcontroladores El microcontrolador ejecuta el programa cargado en la memoria Flash. Esto se denomina el código ejecutable y está compuesto por una serie de ceros y unos,
Unidad IV: Programación de microcontroladores El microcontrolador ejecuta el programa cargado en la memoria Flash. Esto se denomina el código ejecutable y está compuesto por una serie de ceros y unos,
Arquitectura de Computadores II
 Facultad de Ingeniería Universidad de la República Instituto de Computación Temas Repaso de conceptos Microcontroladores CISC vs RISC CISC Complex Instruct Set Computers RISC Reduced Instruct Set Computers
Facultad de Ingeniería Universidad de la República Instituto de Computación Temas Repaso de conceptos Microcontroladores CISC vs RISC CISC Complex Instruct Set Computers RISC Reduced Instruct Set Computers
 CAPITULO I 1.1 Introduccion Los sistemas digitales han logrado avanzar a tal grado que en la actualidad se pueden alcanzar logros que alguna ves solo fueron en los sueños, de forma que ahora se pueden
CAPITULO I 1.1 Introduccion Los sistemas digitales han logrado avanzar a tal grado que en la actualidad se pueden alcanzar logros que alguna ves solo fueron en los sueños, de forma que ahora se pueden
PRÁCTICA 6: Gobierno del display 7 segmentos
 SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 6: Gobierno del display 7 segmentos Display 7 segmentos - 1 - Ingeniería de Sistemas y Automática 1. Objetivos: Gobierno
SISTEMAS ELECTRÓNICOS Y AUTOMÁTICOS PRACTICAS DE MICROCONTROLADORES PIC PRÁCTICA 6: Gobierno del display 7 segmentos Display 7 segmentos - 1 - Ingeniería de Sistemas y Automática 1. Objetivos: Gobierno
0-31 : caracteres de control : carac. Comunes : especiales (flechas, símbolos) y particulares (ñ)
 y particulares (ñ)") Hardware y Software (1/6) Lenguaje binario Los ordenadores sólo entienden 1 y 0. Lógica positiva: 0: no hay señal 1: hay señal Código ASCII American Standard Code for Information Interchange Carácter =
Hardware y Software (1/6) Lenguaje binario Los ordenadores sólo entienden 1 y 0. Lógica positiva: 0: no hay señal 1: hay señal Código ASCII American Standard Code for Information Interchange Carácter =
Estructura del Computador
 Estructura del Computador 1 definiciones preliminares Estructura: es la forma en que los componentes están interrelacionados Función: la operación de cada componente individual como parte de la estructura.
Estructura del Computador 1 definiciones preliminares Estructura: es la forma en que los componentes están interrelacionados Función: la operación de cada componente individual como parte de la estructura.
Fundamentos Taller de interrupciones
 Fundamentos Taller de interrupciones Francisco García Eijó Segundo Cuatrimestre de 20 - Organización del Computador I El PIC 6F84 El PIC6F84 es un microcontrolador de la empresa Microchip. Cuenta con las
Fundamentos Taller de interrupciones Francisco García Eijó Segundo Cuatrimestre de 20 - Organización del Computador I El PIC 6F84 El PIC6F84 es un microcontrolador de la empresa Microchip. Cuenta con las
ESTRUCTURA BÁSICA DEL µc AT89C51
 Desde mediados de la década de los 80 s gran parte de los diseños basados en la automatización (electrodomésticos, sencillas aplicaciones Industriales, instrumentación medica, control numérico, etc.) utilizaban
Desde mediados de la década de los 80 s gran parte de los diseños basados en la automatización (electrodomésticos, sencillas aplicaciones Industriales, instrumentación medica, control numérico, etc.) utilizaban
Capítulo 1. Introducción a los PIC de 8 bits
 Capítulo 1. Introducción a los PIC de 8 bits 1.1 Memorias y Registros Entre los componentes básicos de un microcontrolador podemos definir el contador, sus registros, la memoria, el watchdog timer, el
Capítulo 1. Introducción a los PIC de 8 bits 1.1 Memorias y Registros Entre los componentes básicos de un microcontrolador podemos definir el contador, sus registros, la memoria, el watchdog timer, el
Microcontrolador PIC 16F84
 PROGRAMACIÓN PIC (II) Microcontrolador PIC 16F84 mail : enric.serra 0 - INTRODUCCIÓN. Este documento es una continuación al documento de programación del PIC 16f84. Este documento se puede copiar y utilizar
PROGRAMACIÓN PIC (II) Microcontrolador PIC 16F84 mail : enric.serra 0 - INTRODUCCIÓN. Este documento es una continuación al documento de programación del PIC 16f84. Este documento se puede copiar y utilizar
TEMA 1: Concepto de ordenador
 TEMA 1: Concepto de ordenador 1.1 Introducción Los ordenadores necesitan para su funcionamiento programas. Sin un programa un ordenador es completamente inútil. Para escribir estos programas necesitamos
TEMA 1: Concepto de ordenador 1.1 Introducción Los ordenadores necesitan para su funcionamiento programas. Sin un programa un ordenador es completamente inútil. Para escribir estos programas necesitamos
MANUAL DE MICROCONTROLADORES PIC
 MANUAL DE MICROCONTROLADORES PIC Contenido: CAPITULO 1 Introducción a los microcontroladores ( Microcontroladores PIC de Microchip) CAPITULO 2 Programación en lenguaje ensamblador CAPITULO 3 Técnicas en
MANUAL DE MICROCONTROLADORES PIC Contenido: CAPITULO 1 Introducción a los microcontroladores ( Microcontroladores PIC de Microchip) CAPITULO 2 Programación en lenguaje ensamblador CAPITULO 3 Técnicas en
BIBLIOGRAFIA TEORIA DE CIRCUITOSY DISPOSOTIVOS BOYLESTAD ELECTRONICA DIGITAL TOKHEIM SISTEMAS DIGITALES TOCCI
 Guía de preparación para el examen ELECTRONICA CxTx En esta materia básicamente se evalúan temas tales como son: MULTIVIBRADORES, MEMORIAS, CONTADORES Y COMPUERTAS LOGICAS, SUMADOR RESTADOR Y MICROPOCESADORES
Guía de preparación para el examen ELECTRONICA CxTx En esta materia básicamente se evalúan temas tales como son: MULTIVIBRADORES, MEMORIAS, CONTADORES Y COMPUERTAS LOGICAS, SUMADOR RESTADOR Y MICROPOCESADORES
INDICE Capitulo 1. Microcontroladores Programables: La Solución está en un CHIP Capitulo 2. Microcontroladores de 8 BITS: Los <<PIC>>
 INDICE Prólogo XIII Capitulo 1. Microcontroladores Programables: La Solución está en un CHIP 1 1.1. Qué es un microcontrolador? 1 1.1.1. Diferencia entre microprocesador y microcontrolador 3 1.4. Arquitectura
INDICE Prólogo XIII Capitulo 1. Microcontroladores Programables: La Solución está en un CHIP 1 1.1. Qué es un microcontrolador? 1 1.1.1. Diferencia entre microprocesador y microcontrolador 3 1.4. Arquitectura
Características PIC16F84
 Departamento de Electrónica Fundación San Valero del Toda la información que grabamos (memoria de programa y de datos) se puede modificar con el microcontrolador conectado a la aplicación. (ICSP = In-Circuit
Departamento de Electrónica Fundación San Valero del Toda la información que grabamos (memoria de programa y de datos) se puede modificar con el microcontrolador conectado a la aplicación. (ICSP = In-Circuit
Elementos constituyentes de la ejecución de un programa
 Micro-Operaciones En la ejecución de un programa en una computadora, se ejecutan instrucciones, que pueden subdividirse en ciclos: Búsqueda/Ejecución Cada ciclo se compone a su vez de una serie de operaciones
Micro-Operaciones En la ejecución de un programa en una computadora, se ejecutan instrucciones, que pueden subdividirse en ciclos: Búsqueda/Ejecución Cada ciclo se compone a su vez de una serie de operaciones
MEMORIA EJERCICIO 1 EJERCICIO 2
 MEMORIA EJERCICIO 1 Determinar el mapa de memoria de un procesador con 16 señales de bus de direcciones, una señal de asentimiento de bus de direcciones AS, una señal de lectura R, otra de escritura W
MEMORIA EJERCICIO 1 Determinar el mapa de memoria de un procesador con 16 señales de bus de direcciones, una señal de asentimiento de bus de direcciones AS, una señal de lectura R, otra de escritura W
Arquitectura Interna del 8088
 Arquitectura Interna del 8088 Intel diseñó el 8088/8086 para realizar al mismo tiempo las principales funciones internas de transferencia de datos y búsqueda de instrucciones. Para conseguir esto, el 8088
Arquitectura Interna del 8088 Intel diseñó el 8088/8086 para realizar al mismo tiempo las principales funciones internas de transferencia de datos y búsqueda de instrucciones. Para conseguir esto, el 8088
Microprocesador. Introducción. Instituto Sagrado Corazón de Jesús
 Microprocesador Introducción El microprocesador es la parte de la computadora diseñada para llevar acabo o ejecutar los programas. Este viene siendo el cerebro de la computadora, el motor, el corazón de
Microprocesador Introducción El microprocesador es la parte de la computadora diseñada para llevar acabo o ejecutar los programas. Este viene siendo el cerebro de la computadora, el motor, el corazón de
Arquitectura (Procesador familia 80 x 86 )
") Arquitectura (Procesador familia 80 x 86 ) Diseño de operación Basada en la arquitectura Von Newman Memoria CPU asignadas direcciones I / O BUS: Es un canal de comunicaciones Bus de direcciones: Contiene
Arquitectura (Procesador familia 80 x 86 ) Diseño de operación Basada en la arquitectura Von Newman Memoria CPU asignadas direcciones I / O BUS: Es un canal de comunicaciones Bus de direcciones: Contiene
Página 1 de 12 CONCEPTOS INFORMÁTICOS BÁSICOS
 Página 1 de 12 CONCEPTOS INFORMÁTICOS BÁSICOS CONTENIDOS a. CONCEPTOS INFORMÁTICOS i. Informática ii. Sistema informático iii. Ordenador iv. El sistema binario v. Medidas de almacenamiento de la información
Página 1 de 12 CONCEPTOS INFORMÁTICOS BÁSICOS CONTENIDOS a. CONCEPTOS INFORMÁTICOS i. Informática ii. Sistema informático iii. Ordenador iv. El sistema binario v. Medidas de almacenamiento de la información
PIC MICRO ESTUDIO Reloj en tiempo real RTCU2 Clave: 719 www.electronicaestudio.com
 PIC MICRO ESTUDIO Reloj en tiempo real RTCU2 Clave: 719 www.electronicaestudio.com Guía de Operación Reloj en tiempo real Modulo: RTCU2iempo real Clave: 719 El modulo 719 Reloj en tiempo real- utiliza
PIC MICRO ESTUDIO Reloj en tiempo real RTCU2 Clave: 719 www.electronicaestudio.com Guía de Operación Reloj en tiempo real Modulo: RTCU2iempo real Clave: 719 El modulo 719 Reloj en tiempo real- utiliza
El Microprocesador. Tecnología y Funcionamiento
 El Microprocesador Tecnología y Funcionamiento EL MICROPROCESADOR (I) El microprocesador aparece como un circuito integrado con una muy elevada escala de integración VHSI. El empleo de los microprocesadores
El Microprocesador Tecnología y Funcionamiento EL MICROPROCESADOR (I) El microprocesador aparece como un circuito integrado con una muy elevada escala de integración VHSI. El empleo de los microprocesadores
Microcontroladores PIC
 Microcontroladores PIC 1 Características generales: Arquitectura Harvard, procesador segmentado. Compatibilidad software entre los modelos de la misma gama. Sencillez de uso y herramientas de desarrollo
Microcontroladores PIC 1 Características generales: Arquitectura Harvard, procesador segmentado. Compatibilidad software entre los modelos de la misma gama. Sencillez de uso y herramientas de desarrollo
Assembler para PICs. Permite la utilización de etiquetas, tanto para apuntar a direcciones como para definir valores constantes.
 Características generales del lenguaje: Emplea los mnemotécnicos de las instrucciones del μc. En nuestro caso corresponderá al set de instrucciones de los PICs de la gama media (35 instrucciones). Permite
Características generales del lenguaje: Emplea los mnemotécnicos de las instrucciones del μc. En nuestro caso corresponderá al set de instrucciones de los PICs de la gama media (35 instrucciones). Permite
MICROCONTROLADORES PIC BÁSICO (PIC 16F84A / 16F627)
") MICROCONTROLADORES PIC BÁSICO (PIC 16F84A / 16F627) TEMARIO Objetivo: El estudiante comprenderá la evolución de los microcontroladores y microprocesadores así como sus diferencias, desarrollara su habilidad
MICROCONTROLADORES PIC BÁSICO (PIC 16F84A / 16F627) TEMARIO Objetivo: El estudiante comprenderá la evolución de los microcontroladores y microprocesadores así como sus diferencias, desarrollara su habilidad
Preguntas claves (y sus respuestas)
") 1 Preguntas claves (y sus respuestas) Qué es un microprocesador? Es un Circuito Integrado Secuencial Síncrono Qué necesita para funcionar? Qué hace? Para qué? Una tensión continua estable (5V, 3.3V, 2.5V,
1 Preguntas claves (y sus respuestas) Qué es un microprocesador? Es un Circuito Integrado Secuencial Síncrono Qué necesita para funcionar? Qué hace? Para qué? Una tensión continua estable (5V, 3.3V, 2.5V,
ESTRUCTURA BÁSICA DE UN ORDENADOR
 ESTRUCTURA BÁSICA DE UN ORDENADOR QUÉ ES UN ORDENADOR? Un ordenador es una máquina... QUÉ ES UN ORDENADOR? Un ordenador es una máquina... QUÉ ES UN ORDENADOR? Un ordenador es una máquina... Qué son los
ESTRUCTURA BÁSICA DE UN ORDENADOR QUÉ ES UN ORDENADOR? Un ordenador es una máquina... QUÉ ES UN ORDENADOR? Un ordenador es una máquina... QUÉ ES UN ORDENADOR? Un ordenador es una máquina... Qué son los
Centro Asociado Palma de Mallorca. Tutor: Antonio Rivero Cuesta
 Centro Asociado Palma de Mallorca Arquitectura de Ordenadores Tutor: Antonio Rivero Cuesta Unidad Didáctica 2 Estructura de un Computador Tema 4 Estructura Básica de un Computador Introducción La estructura
Centro Asociado Palma de Mallorca Arquitectura de Ordenadores Tutor: Antonio Rivero Cuesta Unidad Didáctica 2 Estructura de un Computador Tema 4 Estructura Básica de un Computador Introducción La estructura
CAPÍTULO 2. ARQUITECTURA Y COMPONENTES.
 CAPÍTULO 2. ARQUITECTURA Y COMPONENTES. 2.1. ARQUITECTURA DEL SISTEMA. Vamos a proporcionar en este apartado una visión general de la arquitectura del sistema, para que así el lector pueda obtener una
CAPÍTULO 2. ARQUITECTURA Y COMPONENTES. 2.1. ARQUITECTURA DEL SISTEMA. Vamos a proporcionar en este apartado una visión general de la arquitectura del sistema, para que así el lector pueda obtener una
SALTOS EN FUNCIONDE UN BIT Aquéllas que pueden producir el salto en función del estado de un bit. Son btfsc y
 SISTEMAS ELECTRONICOS DIGITALES SALTO CONDICIONAL El repertorio del PIC16F84 también dispone de instrucciones de salto condicional, que son aquéllas que producen un salto en función de que se cumpla o
SISTEMAS ELECTRONICOS DIGITALES SALTO CONDICIONAL El repertorio del PIC16F84 también dispone de instrucciones de salto condicional, que son aquéllas que producen un salto en función de que se cumpla o
Microcontroladores PIC de Microchip: generalidades
 Microcontroladores PIC de Microchip: generalidades PIC significa Peripheral Interface Controller Los fabrica ARIZONA MICROCHIP TECHNOLOGY. Fábrica principal: Chandler (Arizona). Otras en Tender (Arizona),
Microcontroladores PIC de Microchip: generalidades PIC significa Peripheral Interface Controller Los fabrica ARIZONA MICROCHIP TECHNOLOGY. Fábrica principal: Chandler (Arizona). Otras en Tender (Arizona),
Lenguaje Ensamblador sobre PIC 16F84
 Lenguaje Ensamblador sobre PIC 16F84 Roberto Vargas Toledo Iván Figueroa Monsalve El presente trabajo se nos muestra la programación de ensamblador orientada a la programación de PIC 16F84, microcontrolador
Lenguaje Ensamblador sobre PIC 16F84 Roberto Vargas Toledo Iván Figueroa Monsalve El presente trabajo se nos muestra la programación de ensamblador orientada a la programación de PIC 16F84, microcontrolador
Arquitectura y mapa de memoria del 80C167. Cesáreo Fernández Martínez Álvaro Sánchez Miralles
 Arquitectura y mapa de memoria del 80C167 Cesáreo Fernández Martínez Álvaro Sánchez Miralles Introducción Microcontrolador (Embedded Processor) de 16 bits ALU y Registros de 16 bits Diseñado para tareas
Arquitectura y mapa de memoria del 80C167 Cesáreo Fernández Martínez Álvaro Sánchez Miralles Introducción Microcontrolador (Embedded Processor) de 16 bits ALU y Registros de 16 bits Diseñado para tareas
Microcontroladores PIC
 Microcontroladores PIC Procesador RISC. Arquitectura Harvard Pipeline Formato de instrucciones ortogonal Arquitectura basada en banco de registros Distintos periféricos: temporizadores, puertos paralelo/serie,
Microcontroladores PIC Procesador RISC. Arquitectura Harvard Pipeline Formato de instrucciones ortogonal Arquitectura basada en banco de registros Distintos periféricos: temporizadores, puertos paralelo/serie,
Termostato electrónico con PIC y LCD
 COMETARIO TECNICO Termostato electrónico con PIC y LCD Por el Departamento de Ingeniería de Electrónica Elemon S.A. 1N4148 El circuito centra su funcionamiento en el micro controlador PIC16F870 el cual
COMETARIO TECNICO Termostato electrónico con PIC y LCD Por el Departamento de Ingeniería de Electrónica Elemon S.A. 1N4148 El circuito centra su funcionamiento en el micro controlador PIC16F870 el cual
Unidad I: Organización del Computador. Ing. Marglorie Colina
 Unidad I: Organización del Computador Ing. Marglorie Colina Arquitectura del Computador Atributos de un sistema que son visibles a un programador (Conjunto de Instrucciones, Cantidad de bits para representar
Unidad I: Organización del Computador Ing. Marglorie Colina Arquitectura del Computador Atributos de un sistema que son visibles a un programador (Conjunto de Instrucciones, Cantidad de bits para representar
Elección de un microcontrolador
 Elección de un microcontrolador Decisión multivariable. No hay un óptimo evidente Factores: Herramientas de desarrollo Base de conocimientos Precio y disponibilidad Familia versátil y en desarrollo Cantidad
Elección de un microcontrolador Decisión multivariable. No hay un óptimo evidente Factores: Herramientas de desarrollo Base de conocimientos Precio y disponibilidad Familia versátil y en desarrollo Cantidad
Carrera: Técnico Superior en Técnicas Digitales. Alumnos: Emiliano Teseo y José Luis Fernández
 Carrera: Técnico Superior en Técnicas Digitales Instituto: CENT 57 Trabajo final Año 2005 Alumnos: Emiliano Teseo y José Luis Fernández 1 ILUMINACION PARA VIDRIERAS Descripción general (Guía para el usuario)
Carrera: Técnico Superior en Técnicas Digitales Instituto: CENT 57 Trabajo final Año 2005 Alumnos: Emiliano Teseo y José Luis Fernández 1 ILUMINACION PARA VIDRIERAS Descripción general (Guía para el usuario)
Manejo LCD Gráfico DSM
 Manejo LCD Gráfico DSM Christopher Orihuela Sosa 10/09/07 Índice Introducción...1 Hardware...2 LCD...3 patillaje...4 tabla de instrucciones...5 Timings...6 Organización de la pantalla...8 Circuito completo...9
Manejo LCD Gráfico DSM Christopher Orihuela Sosa 10/09/07 Índice Introducción...1 Hardware...2 LCD...3 patillaje...4 tabla de instrucciones...5 Timings...6 Organización de la pantalla...8 Circuito completo...9
Introducción a los microcontroladores. Decanato de Postgrado Mayo de 2011
 Introducción a los microcontroladores Decanato de Postgrado Mayo de 2011 Microcontroladores aaaaa Un microcontrolador (Micro Controller Unit, MCU), es un circuito integrado programable, construido con
Introducción a los microcontroladores Decanato de Postgrado Mayo de 2011 Microcontroladores aaaaa Un microcontrolador (Micro Controller Unit, MCU), es un circuito integrado programable, construido con
Universidad Nacional de Ingeniería Arquitectura de Maquinas I. Unidad II: Arquitectura y Programacion de un Microprocesador (80X86)
") Universidad Nacional de Ingeniería Arquitectura de Maquinas I Unidad II: Arquitectura y Programacion de un Microprocesador (80X86) Arq. de Computadora I Ing. Carlos Ortega H. 1 Interrupciones FUNCIÓN INT
Universidad Nacional de Ingeniería Arquitectura de Maquinas I Unidad II: Arquitectura y Programacion de un Microprocesador (80X86) Arq. de Computadora I Ing. Carlos Ortega H. 1 Interrupciones FUNCIÓN INT
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA INGENIERIA EN COMUNICACIONES Y ELECTRÓNICA ACADEMIA DE COMPUTACIÓN
 INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA UNIDAD CULHUACAN INGENIERIA EN COMUNICACIONES Y ELECTRÓNICA ACADEMIA DE COMPUTACIÓN LABORATORIO DE CIRCUITOS DIGITALES
INSTITUTO POLITÉCNICO NACIONAL ESCUELA SUPERIOR DE INGENIERIA MECANICA Y ELECTRICA UNIDAD CULHUACAN INGENIERIA EN COMUNICACIONES Y ELECTRÓNICA ACADEMIA DE COMPUTACIÓN LABORATORIO DE CIRCUITOS DIGITALES
INFORMÁTICA APLICADA UNIDAD DIDÁCTICA 1. Tema 1 Sistemas informáticos
 INFORMÁTICA APLICADA UNIDAD DIDÁCTICA 1 Tema 1 Sistemas informáticos Introducción Desde la antigüedad el hombre ha diseñado máquinas y mecanismos que le permitan realizar su trabajo más fácil y cómodamente,
INFORMÁTICA APLICADA UNIDAD DIDÁCTICA 1 Tema 1 Sistemas informáticos Introducción Desde la antigüedad el hombre ha diseñado máquinas y mecanismos que le permitan realizar su trabajo más fácil y cómodamente,
LABELN-ELN Laboratorio Nº 5 Circuitos Lógicos Combinacionales
 1 LABELN-ELN Laboratorio Nº 5 Circuitos Lógicos Combinacionales Objetivos Diseñar un circuito digital combinacional que permita realizar la suma de dos números binarios de 3 bits cada uno. Utilizar LEDs
1 LABELN-ELN Laboratorio Nº 5 Circuitos Lógicos Combinacionales Objetivos Diseñar un circuito digital combinacional que permita realizar la suma de dos números binarios de 3 bits cada uno. Utilizar LEDs
Microchip dispone de cuatro familias de microcontroladores de 8 bits para adaptarse a las necesidades de la mayoría de los clientes potenciales.
 Modificado por Luis Frino www.frino.com.ar Fuente www.micro1.com.ar 2.1.8 Herramientas de soporte potentes y económicas La empresa Microchip y otras que utilizan los PIC ponen a disposición de los usuarios
Modificado por Luis Frino www.frino.com.ar Fuente www.micro1.com.ar 2.1.8 Herramientas de soporte potentes y económicas La empresa Microchip y otras que utilizan los PIC ponen a disposición de los usuarios
PANORAMA GENERAL DE LOS µc
 PANORAMA GENERAL DE LOS µc Sistemas Digitales II Este tipo de dispositivos en la actualidad se encuentran en los supermercados, artículos electrodomésticos, instrumentos musicales, juguetes, equipo automotriz
PANORAMA GENERAL DE LOS µc Sistemas Digitales II Este tipo de dispositivos en la actualidad se encuentran en los supermercados, artículos electrodomésticos, instrumentos musicales, juguetes, equipo automotriz
2.1. Código ASM de Programación para el PIC
 2.1. Código ASM de Programación para el PIC PROGRAMA PARA MOVER UNA ARAÑA SEGUN 3 POSICIONES DE LUZ, CON ESTO SE PUEDE HACER QUE CON ALGUNA COMBINACION AVANCE, SE DETENGA, GIRE ALA IZQUIERDA, GIRE A LA
2.1. Código ASM de Programación para el PIC PROGRAMA PARA MOVER UNA ARAÑA SEGUN 3 POSICIONES DE LUZ, CON ESTO SE PUEDE HACER QUE CON ALGUNA COMBINACION AVANCE, SE DETENGA, GIRE ALA IZQUIERDA, GIRE A LA
Apéndice B Programa para calcular inclinación con PIC 16F877A
 Apéndice B Programa para calcular inclinación con PIC 16F877A list p=16f877a ; list directive to define processor #include ; processor specific variable definitions ;***** DEFINICIÓN DE
Apéndice B Programa para calcular inclinación con PIC 16F877A list p=16f877a ; list directive to define processor #include ; processor specific variable definitions ;***** DEFINICIÓN DE