LIM. Validación del software SIMULANCLA mediante la fabricación y simulación de un prototipo del sistema de fondeo. Trabajo fin de Máster
|
|
|
- Gabriel Ortiz Peña
- hace 5 años
- Vistas:
Transcripción
1 Trabajo fin de Máster Validación del software SIMULANCLA mediante la fabricación y simulación de un prototipo del sistema de fondeo Autor: Marta Frade Manso Tutor: Daniel Dopico Dopico Emilio Sanjurjo Maroño Junio 2018 LIM
2 1. Índice Introducción. Desarrollo modelos, sistema medición, control y simulación. Resultados experimentales y conclusiones. LIM 2
3 1. Introducción Antecedentes: Diseño del sistema de fondeo basado en maquetas de madera a escala 1:50. Gran coste de mano de obra y poca fiabilidad. SIMULANCLA permite simular con gran detalle, fiabilidad y ahorro. Motivación: El programa no está validado y se necesita validación para uso comercial. Objetivo inicial: Validación del software SIMULANCLA. Objetivo logrado: Fabricación e instrumentación de la maqueta que permitirá la posterior validación del software SIMULANCLA. LIM 3






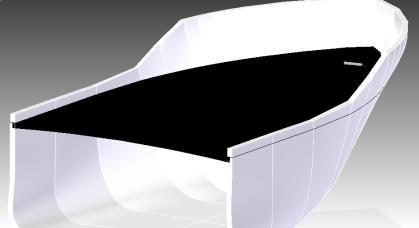
4 2. Diseño de los modelos Fase inicial Se parte de modelos proporcionados de un buque real. Rehacer y prepararlos para su fabricación. Partes del modelo que se crean: Casco: proa. Bancada motor. Cadena. Ancla. Soporte experimental (caja de madera). Cadena Ancla LIM 4




5 2. Diseño de los modelos Cambios Modelos finales LIM 5
6 3. Sistema medición y control Se puede dividir en tres partes: Adquisición de datos. Medición de la velocidad. Medición de la fuerza de tiro. Actuación. Algoritmo de control. LIM 6
7 3. Sistema medición y control Adquisición de datos Medición de la fuerza de tiro Sistema bastante rígido variaciones bastante rápidas de la fuerza frecuencia de muestreo también ha de ser alta. Para calcular frecuencia máxima muestreo se hacen diversas medidas con el Arduino con el programa usado en experimento. Se toma el valor máximo de la diferencia entre los tiempos sucesivos de las medidas. Frecuencia máxima muestreo 1400 Hz Frecuencia más alta contenida en la señal 700 Hz. Para asegurar esto se diseña filtro con frecuencia corte 700 Hz. LIM 7
8 3. Sistema medición y control - Amplificador Medición de la fuerza de tiro Resistencia en serie con el motor baja para no limitar potencia valor bajo de tensión. Resolución Arduino 10 bits (1024 valores) Necesario amplificar. Resistencia en serie con el motor. Bajo para no quitar potencia. No muy bajo para no tener que amplificar tanto. Potencia < 0,25 W. Peor caso I = 0,36 A. Con las anteriores consideraciones valor final 1 Ω. Amplificación aproximada de 10 veces. Amplificador de instrumentación. Menor que 5 voltios y aprovecha casi la totalidad del rango de medida del microcontrolador sin llegar en ningún caso a saturar. LIM 8
9 3. Sistema medición y control - Filtro Medición de la fuerza de tiro Filtro Sallen-Key Butterworth respuesta prácticamente plana desde 0 hasta la frecuencia de corte y desciende bruscamente para frecuencias por encima de las de corte. R= 488 Ω C = 330 nf LIM 9

10 3. Sistema medición y control Calibración experim. Medición de la fuerza de tiro Relación intensidad par Tres pesos: 65 g 101 g 123 g Velocidad 1 rad/s LIM 10
11 3. Sistema medición y control Actuación Empleo puente H permite aislar la parte de potencia de la de control. LIM 11


12 3. Sistema medición y control Actuación II Diodos LIM 12
13 3. Sistema medición y control Algoritmo control Algoritmo de control Arduino Control del experimento. Control mediante PWM (pulse-width modulation). Emula una señal analógica a partir de una señal digital. Ventaja adicional: transistores en saturación o en corte menos disipación energía. Velocidad giro Arduino PWM motor Velocidad giro deseada. Los datos enviados por el Arduino se recuperan en el PC con un script de Matlab para su posterior tratamiento. LIM 13


14 4. Simulación del modelo SIMULANCLA: Dos fases: Primera fase: definir paso a paso cada uno de los aspectos del sistema a simular. Segunda fase: visualización de la representación gráfica tridimensional del proceso de maniobra. Para la primera fase preparación de los modelos + definición parámetros LIM 14
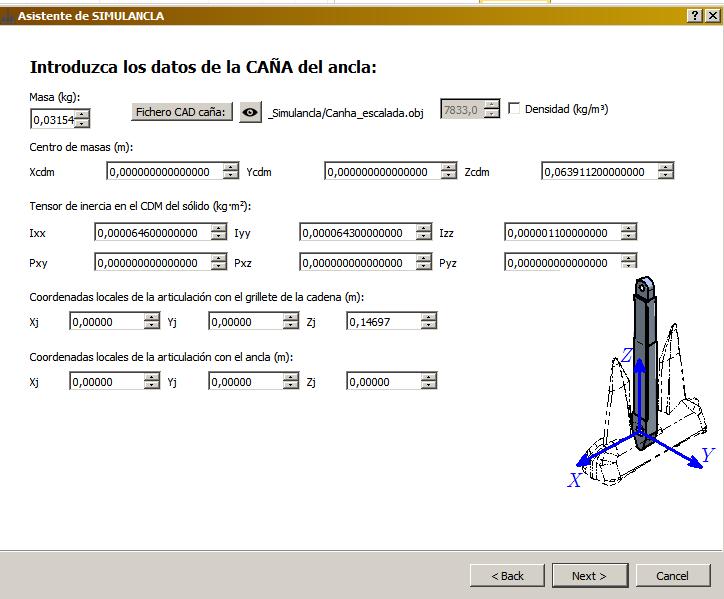


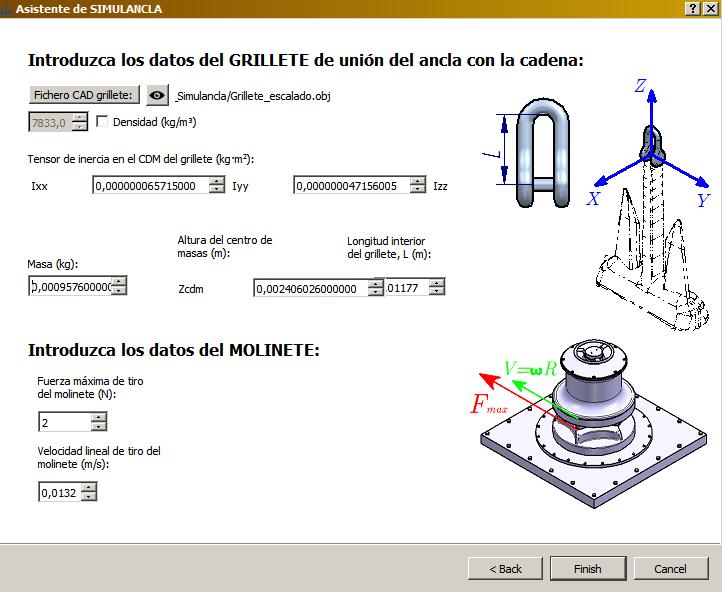
15 4. Simulación del modelo II LIM 15

16 4. Simulación del modelo III Segunda fase. Dos simulaciones LIM 16



17 4. Ensayo del modelo LIM 17
18 5. Resultados experimentales Primer experimento Dos experimentos, desde posición inicial, que se sitúa a una distancia de la punta de las uñas del ancla al 5 suelo de unos 165 mm, hasta la posición final, que se alcanza cuando el ancla queda estibada. Primer experimento, escobén con la tapa transparente. Fuerza (N) t (s) 2 Velocidad (rad/s) t (s) LIM 18
19 5. Resultados experimentales Segundo experimento Segundo experimento, escobén sin la tapa transparente. 5 4 Fuerza (N) t (s) 2 Velocidad (rad/s) t (s) LIM 19
20 5. Resultados experimentales Comparativa Experimento 1 Experimento 1 Experimento 2 Experimento Velocidad Fuerza (rad/s) (N) t (s) t (s) LIM 20
21 6. Conclusiones Los modelos de CAD fueron adaptados y modificados para permitir su impresión 3D. Se diseña el sistema de control y medida. Se preparó el sistema para medir y controlar la velocidad. Se preparó el sistema para medir la fuerza de tiro. Se diseñó el sistema de amplificación y filtrado. Se programó el Arduino para permitir el control del experimento. Se programó un script en Matlab que permite la adquisición de los datos enviados por el Arduino. Se diseñó el sistema de tiro para ejecutar la maniobra de fondeo. Se preparó la simulación de la maqueta. Por falta de tiempo, como se indicó en la introducción, y diversos errores encontrados con el programa sólo se consiguió la obtención de la posición inicial. Se llevaron a cabo los experimentos con la maqueta y se obtuvieron las gráficas que muestran los resultados. Todo ello creó un sistema que podrá ser utilizado para la posterior validación del software SIMULANCLA. LIM 21
22 Gracias por su atención LIM
LIM. Modelado 3D del sistema de fondeo de un barco para la fabricación de maquetas y simulación dinámica con el software SIMULANCLA
 Trabajo fin de Grado Modelado 3D del sistema de fondeo de un barco para la fabricación de maquetas y simulación dinámica con el software SIMULANCLA Autor: Diego Saya Carro Tutor: Daniel Dopico Dopico Ana
Trabajo fin de Grado Modelado 3D del sistema de fondeo de un barco para la fabricación de maquetas y simulación dinámica con el software SIMULANCLA Autor: Diego Saya Carro Tutor: Daniel Dopico Dopico Ana
ESPECIFICACIONES MATERIALES UTILIZADOS
 Contenido Capítulo 1 INTRODUCCIÓN... 17 1.1 Introducción general... 17 1.2 Hipótesis de trabajo... 18 1.3 Objetivos... 18 1.3.1 Objetivo general... 18 1.3.2 Objetivos específicos... 18 1.4 Área de estudio
Contenido Capítulo 1 INTRODUCCIÓN... 17 1.1 Introducción general... 17 1.2 Hipótesis de trabajo... 18 1.3 Objetivos... 18 1.3.1 Objetivo general... 18 1.3.2 Objetivos específicos... 18 1.4 Área de estudio
Capítulo 3: Implementación hardware mediante plataforma en tiempo real. Capítulo 3 Implementación hardware mediante plataforma en tiempo real 33
 Capítulo 3 Implementación hardware mediante plataforma en tiempo real 33 Capítulo 3: Implementación hardware mediante plataforma en tiempo real En el presente capítulo se va a describir los desarrollos
Capítulo 3 Implementación hardware mediante plataforma en tiempo real 33 Capítulo 3: Implementación hardware mediante plataforma en tiempo real En el presente capítulo se va a describir los desarrollos
Trabajo Fin de Grado
 Trabajo Fin de Grado Instrumentación de un vehículo automóvil para el estudio de las fuerzas en el neumático Autor Alejandro Amil Varela Tutores Miguel Ángel Naya Villaverde Urbano Lugrís Armesto Julio
Trabajo Fin de Grado Instrumentación de un vehículo automóvil para el estudio de las fuerzas en el neumático Autor Alejandro Amil Varela Tutores Miguel Ángel Naya Villaverde Urbano Lugrís Armesto Julio
En el capítulo anterior se describieron las modificaciones hechas al sistema de
 Capítulo. Modificaciones al instrumento virtual En el capítulo anterior se describieron las modificaciones hechas al sistema de acondicionamiento analógico. Estos cambios forzosamente llevan a cambios
Capítulo. Modificaciones al instrumento virtual En el capítulo anterior se describieron las modificaciones hechas al sistema de acondicionamiento analógico. Estos cambios forzosamente llevan a cambios
Diseño de reguladores PID.
 Universidad Carlos III de Madrid Departamento de Ingeniería de Sistemas y Automática Área de Ingeniería de Sistemas y Automática SEÑALES Y SISTEMAS Práctica 3 Diseño de reguladores PID. 1 Introducción
Universidad Carlos III de Madrid Departamento de Ingeniería de Sistemas y Automática Área de Ingeniería de Sistemas y Automática SEÑALES Y SISTEMAS Práctica 3 Diseño de reguladores PID. 1 Introducción
Circuito de Offset
 Figura 3.3 Conexión del Amplificador Los cálculos para la ganancia son simples y se muestran en la ecuación (3.), en estas se puede observar que para el cálculo de la ganancia es necesario establecer el
Figura 3.3 Conexión del Amplificador Los cálculos para la ganancia son simples y se muestran en la ecuación (3.), en estas se puede observar que para el cálculo de la ganancia es necesario establecer el
LABORATORIO DE ELECTRÓNICA DE POTENCIA PRÁCTICA N 1
 ESCUELA POLITÉCNICA NACIONAL Campus Politécnico "J. Rubén Orellana R." FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control Carrera de Ingeniería Eléctrica LABORATORIO
ESCUELA POLITÉCNICA NACIONAL Campus Politécnico "J. Rubén Orellana R." FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control Carrera de Ingeniería Eléctrica LABORATORIO
PRÁCTICA 13. CIRCUITO AMPLIFICADOR MONOETAPA CON BJT
 PRÁCTICA 13. CIRCUITO AMPLIFICADOR MONOETAPA CON BJT 1. Objetivo Se pretende conocer el funcionamiento de un amplificador monoetapa basado en un transistor BJT Q2N2222. 2. Material necesario Se necesita
PRÁCTICA 13. CIRCUITO AMPLIFICADOR MONOETAPA CON BJT 1. Objetivo Se pretende conocer el funcionamiento de un amplificador monoetapa basado en un transistor BJT Q2N2222. 2. Material necesario Se necesita
Julián Andrés Herrera Valencia Felipe A. Marulanda Castro
 Julián Andrés Herrera Valencia Felipe A. Marulanda Castro Los motores de inducción son muy utilizados en los procesos industriales para suministrar potencia mecánica y, de esta manera, realizar tareas
Julián Andrés Herrera Valencia Felipe A. Marulanda Castro Los motores de inducción son muy utilizados en los procesos industriales para suministrar potencia mecánica y, de esta manera, realizar tareas
CAPÍTULO 6. Conclusiones. 1. Análisis Mecanismo
 CAPÍTULO 6 Conclusiones A pesar de no estar contemplado como una fase del proceso de diseño, el último paso que podría efectuarse antes de la fabricación definitiva del mecanismo en estudio sería la recopilación
CAPÍTULO 6 Conclusiones A pesar de no estar contemplado como una fase del proceso de diseño, el último paso que podría efectuarse antes de la fabricación definitiva del mecanismo en estudio sería la recopilación
Tecnología robótica. Tema 7.- Tarjeta controladora Arduino
 1. Elementos electrónicos. 2. Placa Arduino. Sus componentes. 3. Software de Arduino. 4. Características de programación en Arduino. 5. Proyectos con la tarjeta controladora Arduino. 1. Elementos electrónicos.
1. Elementos electrónicos. 2. Placa Arduino. Sus componentes. 3. Software de Arduino. 4. Características de programación en Arduino. 5. Proyectos con la tarjeta controladora Arduino. 1. Elementos electrónicos.
PRACTICA N 3 ADQUISICIÓN DE DATOS DE TEMPERATURA Y VELOCIDAD
 PRACTICA N 3 ADQUISICIÓN DE DATOS DE TEMPERATURA Y VELOCIDAD Fecha de entrega: 28 de septiembre Durante la realización de esta práctica el estudiante debe familiarizarse con el uso de dos tipos de sensores:
PRACTICA N 3 ADQUISICIÓN DE DATOS DE TEMPERATURA Y VELOCIDAD Fecha de entrega: 28 de septiembre Durante la realización de esta práctica el estudiante debe familiarizarse con el uso de dos tipos de sensores:
Trabajo Fin de Grado. Modelización y simulación de un cambio de buje mediante técnicas dinámicas multicuerpo con contacto
 Trabajo Fin de Grado Modelización y simulación de un cambio de buje mediante técnicas dinámicas multicuerpo con contacto Autor: Diego Maceira Muíños Tutores: Daniel Dopico Dopico Emilio Sanjurjo Maroño
Trabajo Fin de Grado Modelización y simulación de un cambio de buje mediante técnicas dinámicas multicuerpo con contacto Autor: Diego Maceira Muíños Tutores: Daniel Dopico Dopico Emilio Sanjurjo Maroño
Regulación de nivel en un sistema de dos tanques
 Sistema de control de fluidos Regulación de nivel en un sistema de dos tanques Mediante un sencillo sistema de adquisición de datos se ha desarrollado una planta a escala para analizar problemas de tratamiento
Sistema de control de fluidos Regulación de nivel en un sistema de dos tanques Mediante un sencillo sistema de adquisición de datos se ha desarrollado una planta a escala para analizar problemas de tratamiento
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CAPNOGRAFO PORTATIL
 DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CAPNOGRAFO P03 DISEÑO Y ELABORACIÓN DEL CIRCUITO ADECUADOR Y FILTRADO DE LA SEÑAL Actividades A03-1: Diseño, montaje y pruebas del circuito electrónico para la
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE CAPNOGRAFO P03 DISEÑO Y ELABORACIÓN DEL CIRCUITO ADECUADOR Y FILTRADO DE LA SEÑAL Actividades A03-1: Diseño, montaje y pruebas del circuito electrónico para la
CAPÍTULO 3 3. DESARROLLO DEL SOFTWARE DE CONTROL
 8 CAPÍTULO 3 3. DESARROLLO DEL SOFTWARE DE CONTROL En este capítulo se explica lo concerniente a la obtención de modelos matemáticos que sirven como base para el diseño del controlador de corriente y velocidad
8 CAPÍTULO 3 3. DESARROLLO DEL SOFTWARE DE CONTROL En este capítulo se explica lo concerniente a la obtención de modelos matemáticos que sirven como base para el diseño del controlador de corriente y velocidad
PLANIFICACIÓN SEMANAL DE LA ASIGNATURA. GRUPO (marcar X) Indicar espacio distinto de aula (aula informática, audiovisual, etc.)
 Indicar espacio distinto de aula (aula informática, audiovisual, etc.)") DENOMINACIÓN ASIGNATURA: FUNDAMENTOS DE INGENIERÍA ELECTRÓNICA GRADO: INGENIERÍA MECÁNICA CURSO: 2º CUATRIMESTRE: 2º La asignatura tiene 29 sesiones que se distribuyen a lo largo de 15 semanas. La duración
DENOMINACIÓN ASIGNATURA: FUNDAMENTOS DE INGENIERÍA ELECTRÓNICA GRADO: INGENIERÍA MECÁNICA CURSO: 2º CUATRIMESTRE: 2º La asignatura tiene 29 sesiones que se distribuyen a lo largo de 15 semanas. La duración
LIM. Integración mediante filtro de Kalman de sensores inerciales y GPS para la estimación de la posición de un vehículo. Trabajo fin de Grado
 Trabajo fin de Grado Integración mediante filtro de Kalman de sensores inerciales y GPS para la estimación de la posición de un vehículo Autor: Alejandro Vázquez Fraga Tutores: Miguel Ángel Naya Villaverde
Trabajo fin de Grado Integración mediante filtro de Kalman de sensores inerciales y GPS para la estimación de la posición de un vehículo Autor: Alejandro Vázquez Fraga Tutores: Miguel Ángel Naya Villaverde
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ
 PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ FACULTAD DE CIENCIAS E INGENIERÍA DISEÑO DEL CONTROL DE TEMPERATURA DEL PORTASUSTRATO DE UNA CÁMARA DE ALTO VACÍO PARA ELABORAR PELÍCULAS SEMICONDUCTORAS DELGADAS
PONTIFICIA UNIVERSIDAD CATÓLICA DEL PERÚ FACULTAD DE CIENCIAS E INGENIERÍA DISEÑO DEL CONTROL DE TEMPERATURA DEL PORTASUSTRATO DE UNA CÁMARA DE ALTO VACÍO PARA ELABORAR PELÍCULAS SEMICONDUCTORAS DELGADAS
Podemos plantear un sencillo esquema de alarma como el de la figura: V REF 3600( ) T
 T") Lección 4. MEDIDA DE LA EMPEAUA. Diseñe un sistema de alarma de temperatura utilizando una NC. Deberá activarse cuando la temperatura ascienda por encima de ºC con una exactitud de ºC. Datos: B36K, kω@5ºc,
Lección 4. MEDIDA DE LA EMPEAUA. Diseñe un sistema de alarma de temperatura utilizando una NC. Deberá activarse cuando la temperatura ascienda por encima de ºC con una exactitud de ºC. Datos: B36K, kω@5ºc,
PROYECTO FINAL DE CARRERA
 Presupuesto PROYECTO FINAL DE CARRERA Diseño y construcción de un amplificador de muy bajo ruido y un sistema de filtros para el acondicionamiento de señales de un transductor piezoeléctrico PFC presentado
Presupuesto PROYECTO FINAL DE CARRERA Diseño y construcción de un amplificador de muy bajo ruido y un sistema de filtros para el acondicionamiento de señales de un transductor piezoeléctrico PFC presentado
Bases físicas del registro y medida de las variables biológicas Transmisión y control de la información
 Unidad de Física Médica Dpto. de Física, Ingeniería y Radiología Médica Universidad de Salamanca Bases físicas del registro y medida de las variables biológicas Transmisión y control de la información
Unidad de Física Médica Dpto. de Física, Ingeniería y Radiología Médica Universidad de Salamanca Bases físicas del registro y medida de las variables biológicas Transmisión y control de la información
Análisis de Circuitos Trabajo Práctico Final
 Análisis de Circuitos Trabajo Práctico Final Margarita Manterola Padrón 77091 Agosto 2004 Índice 1. Filtro pedido 2 2. Análisis de la transferencia 2 2.1. Filtro pasabajos sencillo........................
Análisis de Circuitos Trabajo Práctico Final Margarita Manterola Padrón 77091 Agosto 2004 Índice 1. Filtro pedido 2 2. Análisis de la transferencia 2 2.1. Filtro pasabajos sencillo........................
Laboratorio de Electrónica de Potencia
 Laboratorio de Electrónica de Potencia Práctica 2 Nombre: No. Cédula: Rectificadores no controlados de onda completa Objetivo General: Utilizar el OrCAD para simular y analizar circuitos rectificadores
Laboratorio de Electrónica de Potencia Práctica 2 Nombre: No. Cédula: Rectificadores no controlados de onda completa Objetivo General: Utilizar el OrCAD para simular y analizar circuitos rectificadores
PRÁCTICA 5. SERVOMOTOR EN BUCLE CERRADO
 PRÁCTICA 5. SERVOMOTOR EN BUCLE CERRADO 1. SISTEMA A CONTROLAR El sistema a controlar es el conjunto motor eléctrico-freno conocido de otras prácticas: Se realizarán experimentos de control de posición
PRÁCTICA 5. SERVOMOTOR EN BUCLE CERRADO 1. SISTEMA A CONTROLAR El sistema a controlar es el conjunto motor eléctrico-freno conocido de otras prácticas: Se realizarán experimentos de control de posición
Microchip Tips & Tricks...
 ARTICULO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de EduDevices. PWM Tips & Tricks Estimados lectores, en los artículos anteriores de Microchip Tips & Tricks se presentaron
ARTICULO TECNICO Microchip Tips & Tricks... Por el Departamento de Ingeniería de EduDevices. PWM Tips & Tricks Estimados lectores, en los artículos anteriores de Microchip Tips & Tricks se presentaron
Equipo de Entrenamiento de Galgas Extensiométricas MEGE
 Equipamiento Didáctico Técnico Equipo de Entrenamiento de Galgas Extensiométricas MEGE NUEVO Productos Gama de Productos Equipos 7.-Mecánica y Materiales DIAGRAMA DEL PROCESO Y DISPOSICIÓN DE LOS ELEMENTOS
Equipamiento Didáctico Técnico Equipo de Entrenamiento de Galgas Extensiométricas MEGE NUEVO Productos Gama de Productos Equipos 7.-Mecánica y Materiales DIAGRAMA DEL PROCESO Y DISPOSICIÓN DE LOS ELEMENTOS
Índice de Contenidos
 Índice de Contenidos CAPÍTULO 1 INTRODUCCION... 12 1.1 El problema (o la oportunidad)... 13 1.2 Objetivo General... 13 1.3 Objetivos específicos... 13 1.5 Alcances y limitaciones... 15 Capítulo 2 MARCO
Índice de Contenidos CAPÍTULO 1 INTRODUCCION... 12 1.1 El problema (o la oportunidad)... 13 1.2 Objetivo General... 13 1.3 Objetivos específicos... 13 1.5 Alcances y limitaciones... 15 Capítulo 2 MARCO
Introducción al giroscopio.
 Introducción al giroscopio. Los giroscopios, o girómetros, son dispositivos que miden o mantienen el movimiento de rotación. MEMS (sistemas microelectromecánicos) giroscopios son pequeños sensores, de
Introducción al giroscopio. Los giroscopios, o girómetros, son dispositivos que miden o mantienen el movimiento de rotación. MEMS (sistemas microelectromecánicos) giroscopios son pequeños sensores, de
8. Instrumentación y sistema de adquisición de datos
 8. Instrumentación y sistema de adquisición de datos Para poder obtener la información de interés del ensayo como son las potencias, energías, rendimientos Es necesario colocar sensores en todos los equipos.
8. Instrumentación y sistema de adquisición de datos Para poder obtener la información de interés del ensayo como son las potencias, energías, rendimientos Es necesario colocar sensores en todos los equipos.
4 INTEGRACIÓN DEL SOFTWARE DE SENSORES PARA ÁNGULO DEL COLECTIVO Y VELOCIDAD DEL ROTOR PRINCIPAL
 4 INTEGRACIÓN DEL SOFTWARE DE SENSORES PARA ÁNGULO DEL COLECTIVO Y VELOCIDAD DEL ROTOR PRINCIPAL Como parte del proyecto Hermes, se habían implementado un sensor de velocidad de rotación del rotor principal
4 INTEGRACIÓN DEL SOFTWARE DE SENSORES PARA ÁNGULO DEL COLECTIVO Y VELOCIDAD DEL ROTOR PRINCIPAL Como parte del proyecto Hermes, se habían implementado un sensor de velocidad de rotación del rotor principal
Modelado. Sistemas Electrónicos de Control. Álvaro Gutiérrez 7 de febrero de
 Modelado Sistemas Electrónicos de Control Álvaro Gutiérrez 7 de febrero de 2018 aguti@etsit.upm.es www.robolabo.etsit.upm.es Índice 1 Introducción 2 Modelado analítico motor DC 3 Modelado experimental
Modelado Sistemas Electrónicos de Control Álvaro Gutiérrez 7 de febrero de 2018 aguti@etsit.upm.es www.robolabo.etsit.upm.es Índice 1 Introducción 2 Modelado analítico motor DC 3 Modelado experimental
7. Diseño mecánico de la bancada y de los soportes
 7. Diseño mecánico de la bancada y de los soportes 7.1. Características generales La bancada debe ser capaz de soportar el peso de los componentes actuales así como de posibles ampliaciones futuras. Debe
7. Diseño mecánico de la bancada y de los soportes 7.1. Características generales La bancada debe ser capaz de soportar el peso de los componentes actuales así como de posibles ampliaciones futuras. Debe
INSTRUMENTACIÓN. PRÁCTICA 1
 Introducción INSTRUMENTACIÓN. PRÁCTICA 1 Medidas de tensión eléctrica y circuitos potenciométricos Los circuitos potenciométricos se emplean frecuentemente para convertir las variaciones de impedancia
Introducción INSTRUMENTACIÓN. PRÁCTICA 1 Medidas de tensión eléctrica y circuitos potenciométricos Los circuitos potenciométricos se emplean frecuentemente para convertir las variaciones de impedancia
Qué es y por qué usarlo
 ARDUINO * El proyecto Arduino: Qué es y por qué usarlo Arduino es un sistema electrónico de prototipado abierto (opensource ) basada en hardware y software flexibles y fáciles de usar. Con conceptos básicos
ARDUINO * El proyecto Arduino: Qué es y por qué usarlo Arduino es un sistema electrónico de prototipado abierto (opensource ) basada en hardware y software flexibles y fáciles de usar. Con conceptos básicos
CAPÍTULO IV. DESARROLLO DEL SISTEMA Y RESULTADOS. La propuesta de este trabajo de tesis es de transmitir y recibir vía fibra óptica,
 CAPÍTULO IV. DESARROLLO DEL SISTEMA Y RESULTADOS. 4.1. INTRODUCCIÓN. La propuesta de este trabajo de tesis es de transmitir y recibir vía fibra óptica, dos señales de voz con pre-modulación digital, cada
CAPÍTULO IV. DESARROLLO DEL SISTEMA Y RESULTADOS. 4.1. INTRODUCCIÓN. La propuesta de este trabajo de tesis es de transmitir y recibir vía fibra óptica, dos señales de voz con pre-modulación digital, cada
Implementación de un prototipo para el accionamiento de un motor de inducción usando energía solar fotovoltaica
 Implementación de un prototipo para el accionamiento de un motor de inducción usando energía solar fotovoltaica Por Lucas L. M. Fernández y Luis R. Torres. Asesores: Guillermo L. Magaldi y Federico M.
Implementación de un prototipo para el accionamiento de un motor de inducción usando energía solar fotovoltaica Por Lucas L. M. Fernández y Luis R. Torres. Asesores: Guillermo L. Magaldi y Federico M.
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES
 INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE SISTEMAS ELECTRÓNICOS DE INTERFAZ PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno integrará circuitos de interfaz empleando
INGENIERÍA MECATRÓNICA EN COMPETENCIAS PROFESIONALES ASIGNATURA DE SISTEMAS ELECTRÓNICOS DE INTERFAZ PROPÓSITO DE APRENDIZAJE DE LA ASIGNATURA CUATRIMESTRE El alumno integrará circuitos de interfaz empleando
1. PRESENTANDO A LOS PROTAGONISTAS...
 Contenido Parte 1. PRESENTANDO A LOS PROTAGONISTAS... 1 1. Un primer contacto con la instrumentación... 3 1.1 Introducción... 3 1.2 Conceptos de tierra y masa. Riesgos eléctricos... 4 1.2.1 La conexión
Contenido Parte 1. PRESENTANDO A LOS PROTAGONISTAS... 1 1. Un primer contacto con la instrumentación... 3 1.1 Introducción... 3 1.2 Conceptos de tierra y masa. Riesgos eléctricos... 4 1.2.1 La conexión
Curso de Electricidad, Electrónica e - CEEIBS /20. Ing. Daniel Thevenet
 Curso de Electricidad, Electrónica e Instrumentación n Biomédica con Seguridad - CEEIBS - 1/20 - Conceptos básicos b Electrónica: Es una rama de la física y la ingeniería que estudia sistemas cuyo funcionamiento
Curso de Electricidad, Electrónica e Instrumentación n Biomédica con Seguridad - CEEIBS - 1/20 - Conceptos básicos b Electrónica: Es una rama de la física y la ingeniería que estudia sistemas cuyo funcionamiento
CAPITULO 2. Métodos para llevar a cabo la variación voltaje/frecuencia. De acuerdo al método para variar la velocidad sincrónica de un motor
 CAPITULO 2 Métodos para llevar a cabo la variación voltaje/frecuencia De acuerdo al método para variar la velocidad sincrónica de un motor trifásico de corriente alterna, debemos alimentar el motor con
CAPITULO 2 Métodos para llevar a cabo la variación voltaje/frecuencia De acuerdo al método para variar la velocidad sincrónica de un motor trifásico de corriente alterna, debemos alimentar el motor con
-CEEIBS Clase 3 Principios básicos de electrónica
 Curso de Electricidad, Electrónica e Instrumentación Biomédica con Seguridad -CEEIBS- 2017 Clase 3 Principios básicos de electrónica Franco Simini, Martını Arregui, Nicolás Alfaro. Núcleo de ingenierıaı
Curso de Electricidad, Electrónica e Instrumentación Biomédica con Seguridad -CEEIBS- 2017 Clase 3 Principios básicos de electrónica Franco Simini, Martını Arregui, Nicolás Alfaro. Núcleo de ingenierıaı
PRÁCTICA DE CHATTER SUPERVISIÓN AUTOMÁTICA DE PROCESOS
 PRÁCTICA DE CHATTER SUPERVISIÓN AUTOMÁTICA DE PROCESOS Desarrollar un sistema capaz de supervisar un proceso y en caso necesario, intervenir para corregirlo si su evolución no es aceptable. Es necesario
PRÁCTICA DE CHATTER SUPERVISIÓN AUTOMÁTICA DE PROCESOS Desarrollar un sistema capaz de supervisar un proceso y en caso necesario, intervenir para corregirlo si su evolución no es aceptable. Es necesario
1.1. Memoria Descriptiva
 .. Memoria Descriptiva Víctor Orozco Valle ... Objeto El objeto de este proyecto es el de construir desde cero, la maqueta de un ascensor con los sensores y accionamientos necesarios para simular el comportamiento
.. Memoria Descriptiva Víctor Orozco Valle ... Objeto El objeto de este proyecto es el de construir desde cero, la maqueta de un ascensor con los sensores y accionamientos necesarios para simular el comportamiento
Trabajo Práctico n 2. Robotización de un Puente Grúa. Presentación. Restricciones. Curso 2011
 Trabajo Práctico n 2 Robotización de un Puente Grúa Presentación Este problema consiste en desarrollar un sistema de control automático que permita robotizar la operación de un puente grúa para la carga
Trabajo Práctico n 2 Robotización de un Puente Grúa Presentación Este problema consiste en desarrollar un sistema de control automático que permita robotizar la operación de un puente grúa para la carga
TELECONTROL Y AUTOMATISMOS
 TELECONTROL Y AUTOMATISMOS ACONDIDIONADORES DE SEÑAL 4. Acondicionamiento de Señal. La señal de salida de un sistema de medición en general se debe procesar de una forma adecuada para la siguiente etapa
TELECONTROL Y AUTOMATISMOS ACONDIDIONADORES DE SEÑAL 4. Acondicionamiento de Señal. La señal de salida de un sistema de medición en general se debe procesar de una forma adecuada para la siguiente etapa
Buenos días Maestro Bosco, estos son los resultados que tengo hasta el momento:
 Buenos días Maestro Bosco, estos son los resultados que tengo hasta el momento: Realicé las pruebas en un sistema Arduino implementando los siguientes métodos para la medición de la corriente rms: a) Medición
Buenos días Maestro Bosco, estos son los resultados que tengo hasta el momento: Realicé las pruebas en un sistema Arduino implementando los siguientes métodos para la medición de la corriente rms: a) Medición
Características. Circuito de medida Sobretensión (permanente / durante 10 s) Sobrecarga (permanente / durante 10 s)
 Sobrecarga (permanente / durante 10 s)") Instrumentación digital Equipo digital diseñado para mostrar por display el valor programado de una variable eléctrica o señal de proceso, según tipo. También útil para regulación si se usa con tarjetas
Instrumentación digital Equipo digital diseñado para mostrar por display el valor programado de una variable eléctrica o señal de proceso, según tipo. También útil para regulación si se usa con tarjetas
TD BANCO DE ENSAYO DE MOTORES DIESEL
 Equipo diseñado para el estudio y comprensión del comportamiento de un motor de combustión diesel monocilíndrico de cuatro tiempos. Se pueden realizar los ensayos necesarios para la obtención de los datos
Equipo diseñado para el estudio y comprensión del comportamiento de un motor de combustión diesel monocilíndrico de cuatro tiempos. Se pueden realizar los ensayos necesarios para la obtención de los datos
ESTRUCTURA BÁSICA Y FUNCIONAMIENTO
 ESTRUCTURA BÁSICA Y FUNCIONAMIENTO La estructura básica de una fuente conmutada o switching consta de 4 partes, como se muestra en la figura 1: Rectificador y filtro de entrada. El elemento activo conmutador.
ESTRUCTURA BÁSICA Y FUNCIONAMIENTO La estructura básica de una fuente conmutada o switching consta de 4 partes, como se muestra en la figura 1: Rectificador y filtro de entrada. El elemento activo conmutador.
ÍNDICE CAPÍTULO 1 INTRODUCCIÓN 1 CAPÍTULO 2 SISTEMAS DE ILUMINACIÓN BALASTROS PARA LÁMPARAS FLUORESCENTES, 23
 ÍNDICE CAPÍTULO 1 INTRODUCCIÓN 1 1.1 PLANTEAMIENTO DEL PROBLEMA, 2 1.2 OBJETIVO, 3 1.3 METODOLOGÍA, 4 CAPÍTULO 2 SISTEMAS DE ILUMINACIÓN 6 2.1 TIPOS DE LÁMPARAS, 7 2.1.1 TÉRMINOS PARA LÁMPARAS, 8 2.2.1.1
ÍNDICE CAPÍTULO 1 INTRODUCCIÓN 1 1.1 PLANTEAMIENTO DEL PROBLEMA, 2 1.2 OBJETIVO, 3 1.3 METODOLOGÍA, 4 CAPÍTULO 2 SISTEMAS DE ILUMINACIÓN 6 2.1 TIPOS DE LÁMPARAS, 7 2.1.1 TÉRMINOS PARA LÁMPARAS, 8 2.2.1.1
PRACTICA 2 VIBRACIONES FORZADAS. 1. Familiarizar al estudiante con los equipos y formas de medición de vibraciones utilizando acelerómetros.
 Labor ator io Dinámica de Máquinas UNIVERSIDAD SIMÓN BOLÍVAR UNIDAD DE LABORATORIOS LABORATORIO A SECCIÓN DINÁMICA DE MÁQUINAS 2.1. Objetivos PRACTICA 2 VIBRACIONES FORZADAS 1. Familiarizar al estudiante
Labor ator io Dinámica de Máquinas UNIVERSIDAD SIMÓN BOLÍVAR UNIDAD DE LABORATORIOS LABORATORIO A SECCIÓN DINÁMICA DE MÁQUINAS 2.1. Objetivos PRACTICA 2 VIBRACIONES FORZADAS 1. Familiarizar al estudiante
Rectificadores con Diodos
 1. RECTIFICADOR DE MEDIA ONDA En este apartado se simulará el más sencillo de los rectificadores vistos en la teoría y que se reduce a un simple diodo en serie con la carga. 1.1. Circuito La Figura 1 muestra
1. RECTIFICADOR DE MEDIA ONDA En este apartado se simulará el más sencillo de los rectificadores vistos en la teoría y que se reduce a un simple diodo en serie con la carga. 1.1. Circuito La Figura 1 muestra
Programa Regular. Docentes: Ing. José Ignacio Pablo Gonzalez Ing. Ezequiel Mazzoni..
 Programa Regular Asignatura: Electrónica I Carreras: Bioingeniería. Ciclo lectivo: 2016. Docentes: Ing. José Ignacio Pablo Gonzalez Ing. Ezequiel Mazzoni.. Carga horaria semanal: 6 horas. Tipo de asignatura:
Programa Regular Asignatura: Electrónica I Carreras: Bioingeniería. Ciclo lectivo: 2016. Docentes: Ing. José Ignacio Pablo Gonzalez Ing. Ezequiel Mazzoni.. Carga horaria semanal: 6 horas. Tipo de asignatura:
Prototipo 1: Seguidor de Línea. QRD1114 (REFLECTIVE OBJECT SENSOR). Descripción:
. Descripción:") Prototipo 1: Seguidor de Línea. QRD1114 (REFLECTIVE OBJECT SENSOR). Descripción: El QRD1114, es un sensor óptico reflectivo el cual contiene un LED emisor infrarrojo y un fototransistor receptor, con cuatro
Prototipo 1: Seguidor de Línea. QRD1114 (REFLECTIVE OBJECT SENSOR). Descripción: El QRD1114, es un sensor óptico reflectivo el cual contiene un LED emisor infrarrojo y un fototransistor receptor, con cuatro
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Ing. Guillermo Murcia Ing. Jorge Luis Strack gjmurcia@fi.mdp.edu.ar jlstrack@fi.mdp.edu.ar Control y monitoreo a través de servidor Ethernet Ejemplo de control y monitoreo de varias estaciones de bombeo
Ing. Guillermo Murcia Ing. Jorge Luis Strack gjmurcia@fi.mdp.edu.ar jlstrack@fi.mdp.edu.ar Control y monitoreo a través de servidor Ethernet Ejemplo de control y monitoreo de varias estaciones de bombeo
INSTRUMENTACION TEMARIO
 INSTRUMENTACION TEMARIO 1. Introducción a la toma de medidas en sistemas físicos 2. Sensores y Transductores 3. Acondicionamiento de la señal: amplificación, normalización y filtrado 4. Sistemas de adquisición
INSTRUMENTACION TEMARIO 1. Introducción a la toma de medidas en sistemas físicos 2. Sensores y Transductores 3. Acondicionamiento de la señal: amplificación, normalización y filtrado 4. Sistemas de adquisición
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Ing. Guillermo Murcia Ing. Jorge Luis Strack gjmurcia@fi.mdp.edu.ar jlstrack@fi.mdp.edu.ar Control y monitoreo a través de servidor Ethernet ETHERNET SHIELD Tensión de alimentación: 5V (se alimenta directamente
Ing. Guillermo Murcia Ing. Jorge Luis Strack gjmurcia@fi.mdp.edu.ar jlstrack@fi.mdp.edu.ar Control y monitoreo a través de servidor Ethernet ETHERNET SHIELD Tensión de alimentación: 5V (se alimenta directamente
1. Introducción LIM 2. Casos implementación:
 Trabajo fin de Grado Implementación de un software de optimización de dinámica de sistemas mecánicos. Aplicación a la optimización de un vehículo Autor: Marta Frade Manso Tutor: Daniel Dopico Dopico Diciembre,
Trabajo fin de Grado Implementación de un software de optimización de dinámica de sistemas mecánicos. Aplicación a la optimización de un vehículo Autor: Marta Frade Manso Tutor: Daniel Dopico Dopico Diciembre,
MÓDULO DE ADQUISICIÓN Y VISUALIZACIÓN DE DATOS PARA CARACTERIZACIÓN DE MOTORES ELÉCTRICOS DE INDUCCIÓN MEDIANTE MEDICIÓN DE PARÁMETROS EXTERNOS
 CARRERA DE INGENIERÍA ELECTRÓNICA EN AUTOMATIZACIÓN Y CONTROL MÓDULO DE ADQUISICIÓN Y VISUALIZACIÓN DE DATOS PARA CARACTERIZACIÓN DE MOTORES ELÉCTRICOS DE INDUCCIÓN MEDIANTE MEDICIÓN DE PARÁMETROS EXTERNOS
CARRERA DE INGENIERÍA ELECTRÓNICA EN AUTOMATIZACIÓN Y CONTROL MÓDULO DE ADQUISICIÓN Y VISUALIZACIÓN DE DATOS PARA CARACTERIZACIÓN DE MOTORES ELÉCTRICOS DE INDUCCIÓN MEDIANTE MEDICIÓN DE PARÁMETROS EXTERNOS
Curso de Electricidad, Electrónica e Instrumentación Biomédica con Seguridad - CEEIBS -
 Curso de Electricidad, Electrónica e Instrumentación Biomédica con Seguridad - CEEIBS - 1/18 Info. Biológica digital - Conceptos básicos Información biológica: En este curso consideraremos información
Curso de Electricidad, Electrónica e Instrumentación Biomédica con Seguridad - CEEIBS - 1/18 Info. Biológica digital - Conceptos básicos Información biológica: En este curso consideraremos información
Convertidores de Medida
 Convertidores de Medida CONCENTRADOR CONC 10 El concentrador CONC 10 es un equipo diseñado para controlar una red de convertidores CNV 9, ya que la gestión de la red es una tarea engorrosa para un autómata,
Convertidores de Medida CONCENTRADOR CONC 10 El concentrador CONC 10 es un equipo diseñado para controlar una red de convertidores CNV 9, ya que la gestión de la red es una tarea engorrosa para un autómata,
MODULO Nº13 PROPULSORES DE CC
 MODULO Nº13 PROPULSORES DE CC UNIDAD: CONVERTIDORES CC - CC TEMAS: Propulsores de CC. Conceptos Básicos de los Motores CC. Técnica PWM. Propulsores Pulsantes. OBJETIVOS: Explicar las características principales
MODULO Nº13 PROPULSORES DE CC UNIDAD: CONVERTIDORES CC - CC TEMAS: Propulsores de CC. Conceptos Básicos de los Motores CC. Técnica PWM. Propulsores Pulsantes. OBJETIVOS: Explicar las características principales
GENERADOR DE PULSOS CON 555
 GENERADOR DE PULSOS CON 555 El generador de pulsos es ampliamente utilizado en aplicaciones digitales como el corazón del circuito ya que permite que estos funcionen. También se puede utilizar como modulador
GENERADOR DE PULSOS CON 555 El generador de pulsos es ampliamente utilizado en aplicaciones digitales como el corazón del circuito ya que permite que estos funcionen. También se puede utilizar como modulador
MULTÍMETROS DIGITALES
 MULTÍMETROS DIGITALES Nuestra gama de multímetros digitales Kaise ofrece una solución para todo tipo de aplicaciones. Nuestros multímetros proporcionan mediciones rápidas, precisas y con total fiabilidad
MULTÍMETROS DIGITALES Nuestra gama de multímetros digitales Kaise ofrece una solución para todo tipo de aplicaciones. Nuestros multímetros proporcionan mediciones rápidas, precisas y con total fiabilidad
INSTRUMENTACIÓN AVANZADA Departamento de Ingeniería Eléctrica y Electromecánica Facultad de Ingeniería Universidad Nacional de Mar del Plata
 Muestreo de señales analógicas Principal requerimiento que surge al muestrear una señal continua: Definir el periodo de muestreo con suficiente exactitud. Ajustar el mismo a un valor adecuado de acuerdo
Muestreo de señales analógicas Principal requerimiento que surge al muestrear una señal continua: Definir el periodo de muestreo con suficiente exactitud. Ajustar el mismo a un valor adecuado de acuerdo
Centro Educativo y Cultural del Estado de Querétaro. Alumnos de Ingeniería, carreras técnicas y profesionistas.
 Taller de Arduino DATOS GENERALES: Fecha:. Hora: Lugar: Participantes: Centro Educativo y Cultural del Estado de Querétaro. Alumnos de Ingeniería, carreras técnicas y profesionistas. DATOS ESPECÍFICOS:
Taller de Arduino DATOS GENERALES: Fecha:. Hora: Lugar: Participantes: Centro Educativo y Cultural del Estado de Querétaro. Alumnos de Ingeniería, carreras técnicas y profesionistas. DATOS ESPECÍFICOS:
U P M. Laboratorio de Electricidad y Electrotecnia. Innovación Educativa
 Coordinador: Pedro A. García Gutiérrez Profesores: María José Suárez, Cristina Gordillo Iracheta, Jesús Fraile Ardanuy, Jesús Fraile Mora, Jesús Maroto. Departamento de Hidráulica y Energética E.T.S.I.
Coordinador: Pedro A. García Gutiérrez Profesores: María José Suárez, Cristina Gordillo Iracheta, Jesús Fraile Ardanuy, Jesús Fraile Mora, Jesús Maroto. Departamento de Hidráulica y Energética E.T.S.I.
MEJORA DE LA CALIDAD DE ENSEÑANZA DE LOS ESTUDIANTES DE INGENIERÍA MEDIANTE EL USO DE INSTRUMENTACIÓN VIRTUAL
 MEJORA DE LA CALIDAD DE ENSEÑANZA DE LOS ESTUDIANTES DE INGENIERÍA MEDIANTE EL USO DE INSTRUMENTACIÓN VIRTUAL A. CUSTODIO, B. COA Departamento de Ingeniería Electrónica. Universidad Nacional Experimental
MEJORA DE LA CALIDAD DE ENSEÑANZA DE LOS ESTUDIANTES DE INGENIERÍA MEDIANTE EL USO DE INSTRUMENTACIÓN VIRTUAL A. CUSTODIO, B. COA Departamento de Ingeniería Electrónica. Universidad Nacional Experimental
LIM. Modelización del conjunto motor-transmisión de un automóvil a partir de datos experimentales. Trabajo final de grado
 Trabajo final de grado Modelización del conjunto motor-transmisión de un automóvil a partir de datos experimentales Autor Alfonso Ramón Varela Olmedo Tutores Miguel Ángel Naya Villaverde Emilio Sanjurjo
Trabajo final de grado Modelización del conjunto motor-transmisión de un automóvil a partir de datos experimentales Autor Alfonso Ramón Varela Olmedo Tutores Miguel Ángel Naya Villaverde Emilio Sanjurjo
Práctica 4 Simulación del sistema de control de motor de CD
 Práctica 4 Simulación del sistema de control de motor de CD Objetivo: Se realiza la simulación detallada de cada bloque del sistema de control de un motor de CD en base al modelado matemático del motor
Práctica 4 Simulación del sistema de control de motor de CD Objetivo: Se realiza la simulación detallada de cada bloque del sistema de control de un motor de CD en base al modelado matemático del motor
CAPÍTULO 3 ETAPA ELECTRÓNICA. 3.1 Introducción
 CAPÍTULO ETAPA ELECTRÓNICA En este capítulo se presenta el estudio de la conmutación en el sentido de los motores de corriente continua, así como la naturaleza de las señales que proceden de los sensores..
CAPÍTULO ETAPA ELECTRÓNICA En este capítulo se presenta el estudio de la conmutación en el sentido de los motores de corriente continua, así como la naturaleza de las señales que proceden de los sensores..
PRÁCTICA 10. EMISOR COMÚN Y COLECTOR COMÚN
 PRÁCTICA 10. EMISOR COMÚN Y COLECTOR COMÚN 1. Objetivo El objetivo de la práctica es comprobar experimentalmente la amplificación de dos monoetapas con un transistor BJT (emisor común y colector común)
PRÁCTICA 10. EMISOR COMÚN Y COLECTOR COMÚN 1. Objetivo El objetivo de la práctica es comprobar experimentalmente la amplificación de dos monoetapas con un transistor BJT (emisor común y colector común)
Dispositivos Semiconductores 1 er Cuatrimestre de TP N o 3
 TP N o 3 Diseño y construcción de un mini-amplificador de audio 1. Condiciones del trabajo Grupos de dos o tres estudiantes. La fecha de entrega y re-entrega es la que se indica en la página web de la
TP N o 3 Diseño y construcción de un mini-amplificador de audio 1. Condiciones del trabajo Grupos de dos o tres estudiantes. La fecha de entrega y re-entrega es la que se indica en la página web de la
1. IDENTIFICACIÓN DE LA GUÍA
 1. IDENTIFICACIÓN DE LA GUÍA Nombre de la guía: Practica final Código de la guía (No.): 3 Taller(es) o Laboratorio(s) aplicable(s): M-110 Tiempo de trabajo práctico estimado: Asignatura(s) aplicable(s):
1. IDENTIFICACIÓN DE LA GUÍA Nombre de la guía: Practica final Código de la guía (No.): 3 Taller(es) o Laboratorio(s) aplicable(s): M-110 Tiempo de trabajo práctico estimado: Asignatura(s) aplicable(s):
Práctica 2: Análisis de circuitos básicos con diodos y transistores Utilización del PSIM para análisis de circuitos electrónicos básicos
 Práctica 2: Análisis de circuitos básicos con diodos y transistores Utilización del PSIM para análisis de circuitos electrónicos básicos EJERCICIO 1: Rectificador de onda completa con puente de diodos
Práctica 2: Análisis de circuitos básicos con diodos y transistores Utilización del PSIM para análisis de circuitos electrónicos básicos EJERCICIO 1: Rectificador de onda completa con puente de diodos
Teoría de Circuitos Proyecto Final 2018 Electrocardiógrafo inalámbrico, Diseño de un Front-End Analógico
 Teoría de Circuitos Proyecto Final 2018 Electrocardiógrafo inalámbrico, Diseño de un Front-End Analógico Licenciatura en Ingeniería Biológica Introducción El presente proyecto consiste en el diseño e implementación
Teoría de Circuitos Proyecto Final 2018 Electrocardiógrafo inalámbrico, Diseño de un Front-End Analógico Licenciatura en Ingeniería Biológica Introducción El presente proyecto consiste en el diseño e implementación
Medida de Temperaturas
 INSTRUMENTACIÓN ELECTRÓNICA Medida de Temperaturas Equipo OHM Con una Pt-100 INTRODUCCIÓN Nuestro trabajo se centra en el desarrollo de un sistema para acondicionar la medida de un PT-100, utilizado para
INSTRUMENTACIÓN ELECTRÓNICA Medida de Temperaturas Equipo OHM Con una Pt-100 INTRODUCCIÓN Nuestro trabajo se centra en el desarrollo de un sistema para acondicionar la medida de un PT-100, utilizado para
Laboratorio de Instrumentación
 Laboratorio de Instrumentación Básica Tema 3: Medidas Patricia Fernández Reguero Noemí Merayo Álvarez Francisco Lago García Universidad de Valladolid 26 de febrero de 2007 1. Introducción Las medidas son
Laboratorio de Instrumentación Básica Tema 3: Medidas Patricia Fernández Reguero Noemí Merayo Álvarez Francisco Lago García Universidad de Valladolid 26 de febrero de 2007 1. Introducción Las medidas son
Conversores Analógico - Digitales (CAD)
") Conversores Analógico - Digitales (CAD) (Para la medición de fenómenos lentos, como los empleados en multímetros digitales, por ejemplo) Características deseables: Exactitud (resolución) Inmunidad a señales
Conversores Analógico - Digitales (CAD) (Para la medición de fenómenos lentos, como los empleados en multímetros digitales, por ejemplo) Características deseables: Exactitud (resolución) Inmunidad a señales
LABORATORIO DE ELECTRÓNICA DE POTENCIA PRÁCTICA N 3 ANÁLISIS E IMPLEMENTACIÓN DE CIRCUITOS DE DISPARO
 FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control LABORATORIO DE ELECTRÓNICA DE POTENCIA 1. TEMA PRÁCTICA N 3 2. OBJETIVOS ANÁLISIS E IMPLEMENTACIÓN DE CIRCUITOS
FACULTAD DE INGENIERÍA ELÉCTRICA Y ELECTRÓNICA Carrera de Ingeniería Electrónica y Control LABORATORIO DE ELECTRÓNICA DE POTENCIA 1. TEMA PRÁCTICA N 3 2. OBJETIVOS ANÁLISIS E IMPLEMENTACIÓN DE CIRCUITOS
Álvaro Andrés Velásquez T. Depto. de Ciencias Básicas Septiembre de 2009
 Álvaro Andrés Velásquez T. Depto. de Ciencias Básicas Septiembre de 2009 Estructura de un curso teórico práctico básico de ciencias Estructura de un curso teórico práctico con proyecto de materia Importancia
Álvaro Andrés Velásquez T. Depto. de Ciencias Básicas Septiembre de 2009 Estructura de un curso teórico práctico básico de ciencias Estructura de un curso teórico práctico con proyecto de materia Importancia
ANEXO TÉCNICO: Desempeño del Control de Frecuencia
 ANEXO TÉCNICO: Desempeño del Control de Frecuencia TÍTULO I. ASPECTOS GENERALES Artículo 1 Objetivo El objetivo del presente Anexo Técnico es definir la metodología para calcular el Factor de Eficiencia
ANEXO TÉCNICO: Desempeño del Control de Frecuencia TÍTULO I. ASPECTOS GENERALES Artículo 1 Objetivo El objetivo del presente Anexo Técnico es definir la metodología para calcular el Factor de Eficiencia
CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO. ÍÑIGO MARTÍN MIMBELA.
 CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO 1 Nombre, apellidos y correo electrónico de EducaMadrid del participante ÍÑIGO MARTÍN MIMBELA. inigo.martin@educa.madrid.org 2 Título de la Unidad Didáctica
CURSO: ROBÓTICA. CONECTANDO CON EL MUNDO FÍSICO 1 Nombre, apellidos y correo electrónico de EducaMadrid del participante ÍÑIGO MARTÍN MIMBELA. inigo.martin@educa.madrid.org 2 Título de la Unidad Didáctica
CONTENIDO PRESENTACIÓN. Capítulo 1 COMPONENTES SEMICONDUCTORES: EL DIODO... 1
 CONTENIDO PRESENTACIÓN Capítulo 1 COMPONENTES SEMICONDUCTORES: EL DIODO... 1 1.1 INTRODUCCIÓN...1 1.2 EL DIODO...2 1.2.1 Polarización del diodo...2 1.3 CARACTERÍSTICAS DEL DIODO...4 1.3.1 Curva característica
CONTENIDO PRESENTACIÓN Capítulo 1 COMPONENTES SEMICONDUCTORES: EL DIODO... 1 1.1 INTRODUCCIÓN...1 1.2 EL DIODO...2 1.2.1 Polarización del diodo...2 1.3 CARACTERÍSTICAS DEL DIODO...4 1.3.1 Curva característica
Herramientas Integradas para Laboratorios de Electrónica
 Herramientas Integradas para Laboratorios de Electrónica NI Educational Laboratory Virtual Instrumentation Suite (NI ELVIS) Integración y funcionalidad con múltiples instrumentos. Combina instrumentación,
Herramientas Integradas para Laboratorios de Electrónica NI Educational Laboratory Virtual Instrumentation Suite (NI ELVIS) Integración y funcionalidad con múltiples instrumentos. Combina instrumentación,
3. Pan & Tilt. 3.1.Parte mecánica del pan & tilt
 3. Pan & Tilt Para poder orientar la cámara tanto horizontalmente como verticalmente, se ha montado sobre un pan & tilt. Así, de esta forma, es posible ajustar el ángulo horizontal (Pan) y el vertical
3. Pan & Tilt Para poder orientar la cámara tanto horizontalmente como verticalmente, se ha montado sobre un pan & tilt. Así, de esta forma, es posible ajustar el ángulo horizontal (Pan) y el vertical
AUTORES: NURY ORTIZ SEBASTIÁN JÁCOME DIRECTOR: ING. ALEXANDER IBARRA
 DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE SILENCIADOR DE SONIDO VARIABLE PARA SISTEMAS DE ESCAPE DE MOTORES DE COMBUSTIÓN INTERNA DE CUATRO TIEMPOS DE 200cc AUTORES: NURY ORTIZ SEBASTIÁN JÁCOME DIRECTOR:
DISEÑO Y CONSTRUCCIÓN DE UN PROTOTIPO DE SILENCIADOR DE SONIDO VARIABLE PARA SISTEMAS DE ESCAPE DE MOTORES DE COMBUSTIÓN INTERNA DE CUATRO TIEMPOS DE 200cc AUTORES: NURY ORTIZ SEBASTIÁN JÁCOME DIRECTOR:
Capítulo 2. señal, es acondicionada y visualizada gráficamente, además se extraen sus características en
 Capítulo 2 Sistema de adquisición y acondicionamiento de señales La adquisición, el acondicionamiento y el análisis de la señales electromiográficas se realizan mediante el uso de un sistema de adquisición
Capítulo 2 Sistema de adquisición y acondicionamiento de señales La adquisición, el acondicionamiento y el análisis de la señales electromiográficas se realizan mediante el uso de un sistema de adquisición
Marco Antonio Andrade Barrera 1 Diciembre de 2015
 Diseño, simulación, construcción, medición y ajuste de un filtro pasa-bajas activo de segundo orden con coeficientes de Bessel, configuración Sallen-Key, ganancia unitaria y una frecuencia de corte f c
Diseño, simulación, construcción, medición y ajuste de un filtro pasa-bajas activo de segundo orden con coeficientes de Bessel, configuración Sallen-Key, ganancia unitaria y una frecuencia de corte f c
Materiales Semiconductores TRABAJO PRÁCTICO Nº 5 Circuitos Rectificadores y Filtrado Analógico
 Materiales Semiconductores TRABAJO PRÁCTICO Nº 5 Circuitos Rectificadores y Filtrado Analógico Objetivos: Identificar los parámetros y características fundamentales de los circuitos rectificadores y de
Materiales Semiconductores TRABAJO PRÁCTICO Nº 5 Circuitos Rectificadores y Filtrado Analógico Objetivos: Identificar los parámetros y características fundamentales de los circuitos rectificadores y de
Índice de Contenidos. EDUARDO ALEXIS CATRILEO MUÑOZ Página 5
 Índice de Contenidos CAPÍTULO 1 INTRODUCCIÓN... 13 1.1 Objetivo General... 14 1.2 Objetivos Específicos... 14 1.3 Antecedentes... 15 1.4 Desarrollo... 16 1.4.1 Modificación de la bomba.... 16 1.4.2 Sistema
Índice de Contenidos CAPÍTULO 1 INTRODUCCIÓN... 13 1.1 Objetivo General... 14 1.2 Objetivos Específicos... 14 1.3 Antecedentes... 15 1.4 Desarrollo... 16 1.4.1 Modificación de la bomba.... 16 1.4.2 Sistema
Ilustración 1. Esquema del test de confirmación de capacidad.
 Título: Diseño e implementación de un emulador de fuentes de corriente continua a partir de un convertidor DC/DC Autores: Luis Alfonso Fernández Serantes Tutores: José Luis Calvo Rolle, Raúl Estrada Vázquez
Título: Diseño e implementación de un emulador de fuentes de corriente continua a partir de un convertidor DC/DC Autores: Luis Alfonso Fernández Serantes Tutores: José Luis Calvo Rolle, Raúl Estrada Vázquez
Caracterización de defectos en sistemas de aislamiento mediante detección de descargas parciales
 Universidad Carlos III de Madrid Repositorio institucional e-archivo Trabajos académicos http://e-archivo.uc3m.es Proyectos Fin de Carrera 2002 Caracterización de defectos en sistemas de aislamiento mediante
Universidad Carlos III de Madrid Repositorio institucional e-archivo Trabajos académicos http://e-archivo.uc3m.es Proyectos Fin de Carrera 2002 Caracterización de defectos en sistemas de aislamiento mediante
Table of Contents. Table of Contents UniTrain Cursos UniTrain Cursos UniTrain de electrónica. Lucas Nülle GmbH Página 1/14
 Table of Contents Table of Contents UniTrain Cursos UniTrain Cursos UniTrain de electrónica 1 2 2 3 Lucas Nülle GmbH Página 1/14 www.lucas-nuelle.es UniTrain Unitrain el sistema de aprendizaje multimedial
Table of Contents Table of Contents UniTrain Cursos UniTrain Cursos UniTrain de electrónica 1 2 2 3 Lucas Nülle GmbH Página 1/14 www.lucas-nuelle.es UniTrain Unitrain el sistema de aprendizaje multimedial
 SISMÓGRAFOS - 4 Estación sismológica: - Sensor (sismómetro) -Registrador (amplificador, convertidor AD, filtros, etc.) sismógrafo actualmente digitalizador + registrador = 1 única unidad generalmente
SISMÓGRAFOS - 4 Estación sismológica: - Sensor (sismómetro) -Registrador (amplificador, convertidor AD, filtros, etc.) sismógrafo actualmente digitalizador + registrador = 1 única unidad generalmente
Practica No. 2 MODELADO DE UN MOTOR DC. Pontificia Universidad Javeriana Facultad de Ingeniería Departamento de Electrónica Laboratorio de Control
 Practica No. 2 MODELADO DE UN MOTOR DC Pontificia Universidad Javeriana Facultad de Ingeniería Departamento de Electrónica Laboratorio de Control 1. Introducción En esta práctica se realiza la formulación
Practica No. 2 MODELADO DE UN MOTOR DC Pontificia Universidad Javeriana Facultad de Ingeniería Departamento de Electrónica Laboratorio de Control 1. Introducción En esta práctica se realiza la formulación